Programmazione Lineare
La ricerca operativa mira a risolvere i problemi di ottimizzazione attraverso
l’implementazioni di programmi, cioè, di algoritmi.
La programmazione lineare riesce a risolvere problemi più complessi seguendo i
passi illustrati di seguito.
Identificazione del
problema
Osservazione del sistema
Ingegnerizzazione
Costruire il modello
Validazione del modello
Un problema affinché possa essere risolto deve essere posto nel modo seguente:
min z x
Ax b
x0
funz.obiettivo
funz.lineare
- f : Rn Rn
Le proprietà di linearità sono:
- proprietà additiva f x y f x f y x, y R n
- proprietà di proporzionalità f x f x x R n , R
-
x : variabili decisionali, viene rappresentato attraverso un vettore di n
dimensione.
x1
x
x 2
...
xn
x Rn
- A è la matrice dei coefficienti di vincolo così definita:
A R mn
b1
b
b 2
...
bn
- b Rm
n
- z x ci xi ,
i 1
c1
c
ci sono i coefficienti di costo: c 2
...
c n
- z x c T x
In sintesi il problema diventa:
min z x
a x a x ... a x b
12 2
1n n
1
11 1
...
a x a x ... a x b
m2 2
mn n
m
m1 1
x1 0, x 2 0,..., x n 0
Esempio
Formulazione di un problema di PL: Modello di Produzione
Un industria chimica produce tre tipi di composti A, B, C, utilizzando per la
produzione due stabilimenti. Nel primo, un’ora di lavorazione costa 50 euro e
vengono prodotti 3 Kg di composto A, 2 Kg di composto B e 3 Kg di composto
C.
Nel secondo impianto, dove un’ora di produzione ha un costo pari a 75 euro, ogni
ora si producono 4 Kg di composto chimico A, 4 Kg di composto chimico B e 5
Kg di composto C. Dei tre composti chimici è richiesta una produzione giornaliera
pari ad almeno 90, 120 e 100 Kg rispettivamente.
La produzione dei tre composti comporta la generazione di sostanze inquinanti; in
particolare per ogni Kg di composto A si producono 20 gr di sostanza inquinante,
mentre per ogni Kg di composto B o C la quantità di sostanza inquinante prodotta
è pari a 10 gr. Una legge regionale sul controllo della qualità dell’ambiente
impone che non è possibile produrre giornalmente più di 5 Kg di sostanze
inquinanti.
Considerando che ogni impianto può essere utilizzato a ciclo continuo, formulare
il modello di programmazione lineare relativo alla pianificazione ottimale della
produzione giornaliera dei tre composti chimici, con l’obiettivo di minimizzare i
costi complessivi di lavorazione.
- x1 n° di ore di lavorazione dell’impianto 1
- x2 n° di ore di lavorazione dell’impianto 2
- zx 50x1 75x2 ,
50 e 75 sono coefficienti di costo
Vincoli sulla produzione, cioè sulla quantità da produrre
3x1 4 x2 90 prodottoA
2 x1 4 x2 120 prodottoB
3x 5 x 100 prodottoC
2
1
Vincoli sull’utilizzo degli stabilimenti
Ogni impianto può essere utilizzato a ciclo continuo:
x1 24
x2 24
Vincoli sulla quantità di sostanza inquinante
3Kg 20 gr 2 Kg 10 gr 3Kg 10 gr 110 gr
4 Kg 20 gr 4 Kg 10 gr 5Kg 10 gr 170 gr
110x1 170x2 5000
Programmazione Lineare in forma standar:
min z x
z x 50 x 75 x
1
2
sistema di vincolo :
3 x1 4 x 2 90
2 x1 4 x 2 120
3 x1 5 x 2 100
110 x1 170 x 2 5000
x1 24
x 2 24
x1 0; x 2 0
1IMPIANTO
2IMPIANTO
4
3
2
4
3
5
A
;
110
170
1
0
1
0
x
x 1 ;
x2
90
120
100
b
.
5000
24
24
Le condizioni standard impongono di avere uguaglianze e non
disuguaglianze. Quindi se ci troviamo nel caso in cui:
max z x min z x
max f x : x R n min f x : x R n
f x f x
z x 3x1 4 x 2 5 x3 max z x
z x z x 3 x1 4 x 2 5 x3 min z x
Vincoli espressi con disuguaglianze:
-
a
ij
x j bj
Si introduce a questo punto la variabile ausiliaria si bi aij x j che per
essere introdotta nella programmazione lineare deve essere si 0 .
110x1 170x2 5000 introduciamo x3 e diventa:
110 x1 170 x2 x3 5000
-
a
ij
x j bj
Introduciamo anche questa volta una variabile ausiliaria:
si aij x j bi
si 0
3x1 4 x 2 90 x 4
3x1 4 x 2 x 4 90
- Quando una delle variabili decisionali non è x 0 si introducono altre
variabili decisionali:
x j , x j
xj 0
x j 0, x j 0
x j x j x j
x j x j 0
Ritornando all’esercizio, ci occorrono le seguenti variabili ausiliari:
x3 , x4 , x5 , x6 , x7 , x8
L’esposizione del problema in questione diventa:
3x1 4 x 2 x3 90
2 x 4 x x 120
1
2
4
3x1 5 x 2 x5 100
110 x1 170 x 2 x6 5000
x1 x7 24
x 2 x8 24
90
120
100
b
;
5000
24
24
4 1 0 0 0 0 0
3
2
4
0 1 0 0 0 0
3
5
0 0 1 0 0 0
A
.
110 170 0 0 0 1 0 0
1
0
0 0 0 0 1 0
1
0 0 0 0 0 1
0
m n Si hanno più equazioni di vincolo rispetto alle incognite;
m n Il numero di equazioni è uguale alle incognite, è risolvibile
quando:
1. det A 0
2. det A 0
Nel caso (1) esiste una soluzione; nel caso (2) è possibile che ci sia un’equazione
ridondante
m n Esistono infinite soluzioni. Risulta un problema trovare quella ottima e
affinché il problema venga risolto si deve verificare che:
p A m
Il problema risulta ben posto.
mn
- Verificare se in A ci sono delle colonne linearmente indipendenti, quindi se è
possibile estrarre una matrice.
- Ci sono infinite soluzioni che verificano i vincoli
Se
m3
n5
n!
1 2 3 4 5 120
10
m!n m!
62
12
10 sono le soluzioni di base, all’interno delle quali c’è la soluzione ottima.
Come si calcolano le soluzioni di base?
- s s1 , s2 ,..., sm è l’insieme degli indici di base
- A R mn
1 2 3 n
A
Se le colonne 1,2 e 5 sono linearmente indipendenti allora avremo che:
1 2 5
As
,
1 2 7
As
,
Può succedere che si hanno più colonne linearmente indipendenti e quindi
possiamo estrarre più matrici. Quindi si avranno più insiemi s per quante
sottomatrici di A esistono.
x1 x1
x x m ;
x n x n
x1
Variabili di base: x s ;
x m
x m 1
Variabili non di base: xG
x n
La stessa cosa possiamo fare per la matrice A:
A As
AG
Il problema in forma standard diventa:
min z x
xs
z x c T x C s C G
xG
S
.
V
.
xs
As AG b Ax b
xG
x s 0, xG 0
As x s AG xG b
As è costituita da colonne linearmente indipendenti, non è singolare ma essendo
quadrata è invertibile.
As1 As x s As1 AG xG As1 b
x s As1 AG xG As1 b
ponendo xG 0
x s As1 b
Infine una soluzione di base è ammissibile quando soddisfa i vincoli.
Esempio 1
2 x1 2 x 2 x3 x 4 10
2 x x x 2 x x 12
1
2
3
4
5
4
x
x
2
x
3
x
1
2
3
4 8
x1 , x 2 , x3 , x 4 , x5 0
- Si definisce di seguito la matrice A 3 5 :
1
2
3
4
5
2 2 1 1 0
A 2 1 1 2 1
4 1 2 3 0
-
n!
1 2 3 4 5
10 soluzioni base
m!n m ! 1 2 32
- Il vettore dei termini noti:
10
b 12
8
Consideriamo a caso un insieme a caso di indici di base:
2 1 0
s 2,3,5 As 1 1 1 , dato che risulta il det As 3 0 allora si può dire che le tre
1 2 0
colonne sono linearmente indipendenti e quindi a queste ultime è associata una
soluzione di base.
- La soluzione di base è fatta nel seguente modo:
0
x
2
s x 2 , x3 , x5 2,3,5 x s x3
0
x5
x1 0
x4 0
Si pone:
Allora il sistema diventa il seguente:
2 x 2 x3 10
x2 4
x 2 x3 x5 12 x3 2
x 2x 8
x 6
3
5
2
Infine il vettore delle soluzione è di seguito riportato:
0
4
x 2
0
6
E’ una soluzione ammissibile perché verifica i vincoli e le condizioni. Questa
rappresenta una delle 10 soluzioni che siamo in grado di calcolare.
Esempio 2
Ad esempio se:
0
0
s 3,4,5 x 22
12
14
Rappresenta una soluzione di base non ammissibile a causa del valore negativo.
Una volta che si sono calcolate tutte le 10 soluzioni di base il problema si risolve
con la ricerca della soluzione ottima che è quella che minimizza la funzione
obiettivo. ( Tutto ciò può essere calcolato automaticamente con un programma di
calcolo che utilizza l’algoritmo del simplesso?).
Interpretazione geometrica della Programmazione Lineare
Definizione di Combinazione convessa:
1
2
k
x , x , x con : x
0 1, 1
i
Rn
k
i
i
i
x 1 x 1 2 x 2 k x k vettore risul tan te
x Rn
sono vettori
x
i
x spazio Euclideo di n dimensione
Se tutte le combinazioni sono verificate il vettore risultante è definito
combinazione commessa.
Definizione di Insieme convesso:
R n convesso
x 1 , x 2 ,, x k
k
0 xi 1, i 1
i
x 1 x
1
2 x 2 k x k
E’ combinazione convessa
Definizione di Insieme delle soluzioni ammissibili
x R
i x R n : ai x bi sistema di vincoli che devono soddisfare le variabili
j
n
: xj 0
i j insieme di soluzioni ammissibili
Punto Estremo:
x
x 1 , x 2 ,, x k
0 i 1,
k
i
1
i
x 1 x 1 k x k
Esempio
Quali sono le fasi che ci permettono di trovare la soluzione ottima?
1. Individuare ;
2. Verificare che 0 e cioè che non sia un insieme vuoto;
3. Individuare i punti estremi di
4. Ricavare la soluzione ottima
min z x
z x x 2 x
1
2
S .V .
x1 2 x 2 10
x x 1
2
1
x2 4
x1 , x 2 0
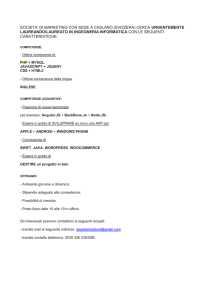
Ad ognuno dei tre vincoli posso associare una retta:
I Vincolo: x1 2x2 10
r1 : x1 2x2 10
II Vincolo: x1 x2 1
r2 : x1 x2 1
III Vincolo: x2 4
r3 : x2 4
X2
Insieme
5
4
E
D
r3
r1
A
C
1
X1
r1
1
10
B
Il problema illustrato è un problema di minimo.
A, B, C, D, E rappresentano i punti estremi di .
A 0,1;
B 1,0;
C 10,0;
E 0,4
D invece si deve calcolare, considerandolo come intersezione di r1 e r3 .
x 2
D 1
x2 4
zx x1 2x2
Avremo che:
zA 2
zB 1
z C 10
z D 10
zE 8
Siccome in questo caso stiamo studiando un problema di minimo, B è la nostra
soluzione ottima.
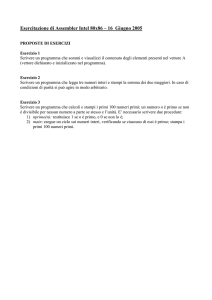
Questo concetto può essere dimostrato per via grafica se si tiene presente c i
coefficienti che compaiono nella funzione obiettivo zx x1 2x2 ;
1
c
2
c è un vettore gradiente e se rappresentato nel piano risulta facile intuire la
soluzione
x2
2
x1
1
Se il problema fosse stato di massimizzazione il verso del gradiente sarebbe stato
l’opposto e avrebbe dato infinite soluzioni ottime:
C z c 10
D z D 10
Questo perché le rette perpendicolari al vettore gradiente, risultano essere parallele a
r1, perciò risulta che tutti i punti su r1 sono soluzioni ottime.