Risonanza magnetica
26/05/2005
La sequenza SPIN ECHO…riprende lezione precedente…
La sequenza Spin-Echo
Descriviamo questi fenomeni dal punto di vista matematico.
Prendiamo in esame il FID, il segnale che misuriamo, in realtà non è proprio un FID
La sequenza relativa al ribaltamento dopo Te si può ripetere n volte finchè il fenomeno secondo T2
non è completamente esaurito; quindi anche la componente T2 su xy si è esaurita.
Aspetto un po’ perché recuperi lungo z e riapplico ribaltamento; poi riparto con 90° e 180° .
Posso fare m ribaltamenti all’interno della sequenza
In
figura
vi
è
il
ribaltamento
di
180°
Il tempo Te e’ il tempo al quale ho il primo echo.
Al tempo Te l’ampiezza del segnale è proporzionale alla densità protonica e dipende anche da T1.
Se Te/2 << Tr cosa che accade in applicazione clinica, si ha:
dove Tr rappresenta il tempo dopo quanto riapplico l’intera sequenza (dell’ordine di centinaia di
mille secondi?)
Il termine -2exp(-Tr-Te/2….) diventa irrilevante.
L’ampiezza del segnale al tempo Te dipende da due parametri scelti dall’operatore:
- Te (dopo quanto tempo applico il ribaltamento Te/2)
- Tr (dopo quanto tempo ripeto l’intera sequenza).
Gli altri parametri presenti nella relazione sono specifici del tessuto che sto studiando e sono
proprio quelli che voglio ricavare:
-T1
-T2
-ρ (densità)
Ad esempio se voglio ricavare T2 faccio una sequenza di spin-echo che ha vari ribaltamenti a 180°.
Per aumentare il rapporto segnale-rumore, faccio ripetere le sequenze più volte.
Nella singola sequenza ho il primo spin, la prima echo e le successive, gli impulsi sono separati da
un tempo Te e i vari echi sono anch’essi separati da un tempo Te, i due sono segnali sono sfasati di
Te/2.
Il segnale da misurare viene rilevato al tempo Te, 2Te, 3Te; gli impulsi si applicano a Te/2,3/2Te
etc.
I campioni delle ampiezze vengono fittati, ricavando così l’esponenziale del segnale decade con la
vera T2.
La relazione iniziale contiene dipendenza da T1 e densità ρ; si può scegliere opportunamente i
parametri Te e Tr in modo da rendere il segnale dipendente essenzialmente da un solo parametro e
molto meno dagli altri.
Immagini T2-Pesate
In generale le tecniche di risonanza magnetica hanno segnali che dipendono da tutti i tre i parametri
ma vi sono casi in cui voglio conoscere immagini dipendenti da solo uno di questi.
Per esempio se scelgo Tr>>T1 (Tr= 4T1) si ha
Prendere Tr grande significa che attendo un tempo lungo tra le ripetizioni delle sequenze. Questo fa
si che il recupero su z si è completato e il fenomeno su T1 si è quindi esaurito.
Immagini T1-Pesate
In modo analogo si procede per avere immagini T1 pesate, quindi immagini che forniscono una
intensità che dipende da T1; si sceglie Te <<T2 (Te piccolo).
L’esponenziale -Te/T2 scompare .
La spiegazione fisica del fenomeno è la seguente: appena ho abbattuto il vettore M sul piano xy non
lascio il tempo agli spin di aprirsi perchè ribalto subito, quindi non inizia quasi il fenomeno che
avrebbe il contributo di T2. Mentre prima il fenomeno di T1 aspettavo finisse qui non lascio
neanche iniziare il fenomeno dipendente da T2.
Immagini ρ-Pesate
Per immagini ρ-pesate, si prende Te piccolo rispetto T2 (Te<<T2) e Tr grande rispetto T1 (Tr
>>T1).
In questo caso ricavo informazione simile a quella ricavabile dalla radiologia, infatti ho perso le
informazioni su T1 e T2 che sono parametri tipici della Risonanza Magnetica; il segnale dipende
essenzialmente dalla densità protonica ρ .
In realtà qui vedo la densità dei protoni di idrogeno, quindi rispetto alla radiologia che trae
informazione sulla densità delle sostanze dei tessuti, ho una differenza, specie nel caso delle ossa
che contengono pochi ioni idrogeno.
La tabella seguente riassume la dipendenza dei parametri.
Figura 1
La figura 1 fa vedere alcune curve, aumento della differenza di intensità tra la curva CSF e Brain,
ottenute solo con contributo di T2.
Le due sequenze di spin-eco in Tr>>T1 (a). I due tessuti sono isodensi perché partono con lo stesso
punto, stessa ρ.
Nell’altra curva (b) si ha Tr dello stesso ordine di T1, e pur avendo la stessa ρ CSF e Brain hanno
tempi T1 di recupero diversi; quando riabbatto nella sequenza i-esima partono da ampiezze diverse
(più grande nel Brain) e ognuna decade con un suo T2, per questo rispetto a prima (a), le curve
hanno origine da punti diversi.
Le misure vengono fatte a ogni Te.
Ecco che si trova che il contrasto cambia a seconda della scelta di Te.
Ad esempio l’ampiezza del segnale del CFS nel primo tratto della figura (b) è più piccola di quella
del brain. La parte relativa al CFS apparirà più scura mentre quella relativa al Brain più chiara (se il
bianco è associato all’ampiezza massima).
Se campiono dove si intersecano le curve il segnale è lo stesso e non sono in grado di distinguere il
Brain dal CSF.
Se campiono con Te maggiore rispetto ai casi precedenti, (nella seconda parte del grafico della
figura b) i toni si invertono e quindi le zone relative al CFS appariranno piu’ chiare, mentre quelle
relative al Brain piu’scure.
Le immagini MNR sono delicate da trattare perché cambiando i parametri scelti dall’operatore
ottengo immagini completamente diverse.
Immagini calcolate
Oltre a immagini pesate posso ottenere immagini calcolate.
Nelle prime scelgo il valore opportuno di Te e Tr per far si che il segnale che ricavo dipenda da un
parametro (T1 o T2), mentre qui parto dai valori misurati dalle immagini e con una operazione mi
ricavo il valore solo di un parametro, T1 o T2. Ogni pixel rappresenterà il valore di T1 o T2 del
voxel nella fetta.
Richiedono un calcolo a valle dell’acquisizione dell’immagine per ricavare il valore del parametro
Immagini T2-Calcolate
Della stessa sequenza si prende il segnale al tempo Te e 2Te per tutti i voxel.
Si esegue il rapporto dei due segnali ricavati
si fa il logaritmo
Te è noto e si ricava T2 come:
Immagini T2-Calcolate
In maniera del tutto analoga si può ricavare una immagine che esprime nei suoi pixel il valore di T1
e’ più delicata perché non lo posso fare nella stessa scansione.
Devo fare due scansioni con tempo di ripetizione Tr’ e Tr’’ e prendo il valore al primo eco(Te) per
entrambi. I segnali ricavati saranno i seguenti:
Si esegue il rapporto dei due segnali che hanno termine esponenziale con T2 comune che si
semplifica.
Ricavo T1 con procedura iterativa.
Vi è un problema dato dal fatto che devo ricavare S1 e S2 in sequenze diverse, ossia tempi diversi,
perchè si può avere artefatto di movimento e quindi faccio rapporto tra immagini che non sono della
stessa sezione.
RISONANZA MAGNETICA NUCLEARE-3
FORMAZIONE DELLE IMMAGINI
Problema
Consiste nel riuscire a distinguere i segnali provenienti dai diversi voxel della regione in esame
(codifica spaziale del segnale NMR). Si tratta quindi di capire come faccio da un unico segnale che
misuro, che è il FID, a ricavare informazioni sui singoli contributi dei singoli voxel d’un volume
per ricostruire l’immagine di questo volume.
Soluzione
La cosa è stata risolta utilizzando un gradiente(derivata) del campo magnetico sovrapposto al
campo magnetico Bo.
A. Gradiente di campo magnetico
Per semplificare le cose, supponiamo di applicare tale gradiente lungo la direzione x. Otteniamo
quindi che il campo magnetico (B(x)) non è più costante ma cresce linearmente al crescere di x.
Il campo così ottenuto si può rappresentare con la seguente relazione:
B(x) = Bx +Gx x
dove
B0 rappresenta il campo magnetico statico;
Gx rappresenta il gradiente del campo magnetico lungo la direzione x;
G =Gxx dà informazioni di quanto aumenta il campo magnetico spostandosi lungo la direzione x;
Sostituendo nella legge di Larmor la relazione appena trovata si ottiene
Ω = γ B0
Ω = γBx + γGx x
LEGGE DI LARMOR
E’ come se avessi il volume diviso in tante fette assiali rispetto all’asse x ognuna delle quali
presenta una sua frequenza di precessione ovvero tutti i protoni che appartengono a questa fetta
procedono con una certa frequenza.
Dalla relazione vista sopra posso ricavare la coordinata x che è univocamente collegata alla
frequenza angolare.
Questo è il legame che ci serviva per ricavare la posizione dei vari contributi.
Possiamo applicare questa soluzione ai vari assi presenti nello spazio. In MR si dispone di tre
gradienti orientati secondo le direzioni canoniche del sistema di riferimento fisso : Gx (gradiente del
campo magnetico lungo l’asse x), Gy (gradiente del campo magnetico lungo l’asse y) e Gz
(gradiente del campo magnetico lungo l’asse z).
Nella generica direzione spaziale r si ha quindi, sovrapposta al campo magnetico Bo, una
variazione di pendenza lineare Gr. La frequenza di risonanza varia nella direzione r come:
dove
-
Gr è un gradiente obliquo nello spazio che ha tre componenti uno per ogni asse. Il suo
modulo è quindi rappresentato da
-
-
Ωo = γ Bo
In questo modo si è riusciti a codificare la posizione spaziale r sulla frequenza del segnale MR e il
procedimento è detto CODIFICA DI FREQUENZA;
B. Metodi di ricostruzione
METODO DELLE PROIEZIONI
Vediamo in primo luogo come la codifica di frequenza consenta di ottenere proiezioni secondo una
direzione qualsiasi. Iniziamo considerando un esperimento consistente nell’individuare la posizione
x di due cilindri pieni d’acqua (solo lì ho dei protoni che rispondono allo stimolo) che si trovano in
un mezzo non eccitabile.
Si osserva quanto segue:
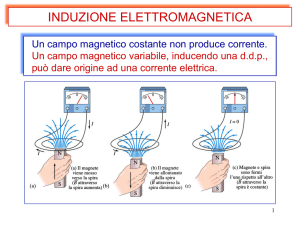
- CAMPO MAGNETICO COSTANTE
In assenza di gradiente, ovvero in presenza di un campo magnetico costante lungo la direzione
x, l’andamento del FID è come quello del grafico sottostante.
Passando alla trasformata di Fourier di tale segnale si nota che ho un singolo picco a una ben
determinata frequenza.
Da tale esperimento capisco che nel fatoccio c’è dell’acqua,ovvero ci sono dei protoni idrogeno
in quanto registro un segnale FID; ma non sono in grado di dire dove sono localizzati tali protoni
idrogeno.
- CAMPO MAGNETICO NON COSTANTE
Introducendo la codifica in frequenza mediante un gradiente Gx, la frequenza di Larmor
dipende linearmente dalla posizione e:
il cilindro a è caratterizzato da un campo magnetico B(xa) e presenta una frequenza di
precessione (xa);
il cilindro b presenta una componente xb > xa quindi è a un maggior campo magnetico ed
è caratterizzato da un maggior frequenza di precessione;
Detto ciò è possibile andare a valutare l’andamento del FID:
Calcolando la trasformata di Fourier del FID,si osserva due componenti la cui frequenza è
proporzionale alla posizione spaziale x, in accordo alla relazione vista precedentemente.
Consideriamo ora il caso della ricostruzione di un generico oggetto 2D. Applicando un
gradiente Gx, la frequenza di Larmor è la stessa per tutti i voxel con la stessa x, i cui contributi
non sono quindi distinguibili nel FID. Ripeto il procedimento per l’asse y, ottenendo
l’informazione dei volumetti lungo l’asse y.
Non è ancora sufficiente per riuscire a ricostruire l’immagine. E’ necessario iterare il
procedimento per n altre direzioni, con angolo dato da
Con questa tecnica si può generare un insieme di proiezioni ed applicare per la ricostruzione
delle immagini gli algoritmi utilizzati nella CT.
METODO DI FOURIER
Il metodo di ricostruzione visto sopra, veniva utilizzato nei primi scanner MRI. Attualmente tale
tecnica viene utilizzata molto raramente a causa della sua lentezza (richiede qualche ora).
Questo metodo non ricorre alle proiezioni ma utilizza direttamente la trasformata di Fourier 2D e
3D.
Prendiamo in esame il seguente problema: dato un oggetto 3D si vuole generare un’immagine di un
piano alla posizione z = zp;
La soluzione del problema avviene seguendo tre fasi successive:
PREPARAZIONE : selezione della sezione assiale;
EVOLUZIONE: codifica di una delle coordinate della sezione attraverso informazioni di fase
sul segnale;
LETTURA: codifica dell’altra coordinata del sistema in frequenza;
Analizziamo ciò che accade durante le tre fasi sopra citate.
1. PREPARAZIONE
In primo luogo eccitiamo selettivamente i voxel della fetta in questione. Ciò si ottiene mediante
il gradiente Gz la cui presenza altera la frequenza di Larmor secondo la:
Se applichiamo un impulso a 90° alla frequenza ’ tale per cui
’= (zp) = 0 + Gz zp
l’intero piano z = zp acquista una magnetizzazione Mxy non nulla : i segnali MR acquisiti
provengono esclusivamente dal piano selezionato, tutti gli altri piani hanno una frequenza di
Larmor diversa (non sono quindi in risonanza con ’, ovvero B1 è in risonanza solo con gli spin
di z =zp) e non vengono eccitati.
In tal modo siamo riusciti a selezionare una sezione assiale del corpo dalla quale inizio a
ricavare delle informazioni. Siamo passati da un’immagine 3D a una in due dimensioni.
Osservazioni:
Lo spessore z della fetta dipende dalla larghezza di banda dell’impulso e
dall’intensità Gz del gradiente secondo la relazione:
Si può quindi diminuire z sia diminuendo la larghezza di banda dell’impulso ( ) sia
aumentando l’intensità del gradiente (Gz ).
Dalle relazioni scritte al punto precedente si può ricavare che per avere una buona
risoluzione in z, occorre un impulso a banda stretta. (es. sinc(t)).
Posizione sezione lungo z: valore di centro banda;
Successivamente alla selezione della fetta, utilizzando i gradienti Gx e Gy, si genera un insieme
di FID in cui le coordinate della posizione dei contributi dei singoli voxel sono codificate in
fase (evoluzione) e in frequenza (lettura).
2. EVOLUZIONE
Tale fase, come detto precedentemente,consiste nella codifica di una coordinata della sezione
(es. y) con fase
Per fare ciò si procede nel seguente modo:
-applico un gradiente Gy che consente di far muovere gli spin con una frequenza di precessione
pari a
-dopo un tempo ty di applicazione di tale gradiente, la fase degli spin è
In questo modo, tutti i voxel con la stessa y hanno la medesima fase y.
In tal modo si è ottenuta la cosiddetta codifica di fase.
3. LETTURA
Tale fase, come detto precedentemente,consiste nella codifica dell’altra coordinata della sezione
(x) con frequenza.
Per fare ciò si spegne Gy e si applica un gradiente lungo l’asse x (gradiente di lettura:Gx). Gli
spin si muovono quindi con una frequenza di Larmor pari a
Gli spin di tutti i voxel con medesima x hanno medesima frequenza ( x)/ 2. Ho quindi
ottenuto la cosiddetta codifica di frequenza .
A questo punto ogni voxel della sezione analizzata è univocamente identificato dalla coppia
( x, y ) dove
- x mi da informazioni sulla coordinata x;
- y mi da informazioni sulla coordinata y;
Nella figura sottostante è riportato lo schema temporale delle varie fasi di generazione del segnale.