Appunti di Strumentazione Biomedica 2
Lezione del 30/05/05
slides di riferimento: Risonanza magnetica nucleare 3 (nomefile: 13-MRI3[1].pdf)
Risonanza magnetica nucleare 4 (nomefile: 14-MRI4[1].pdf)
Sbobinatura: Enea Poletti (e-mail: [email protected], cell: 3471022670)
Codifica con il metodo di Fourier (ultimazione argomento)
slides di riferimento: Risonanza magnetica nucleare 3 (nomefile: 13-MRI3[1].pdf)
Come si era spiegato precedentemente, la generazione di un’immagine da RMN utilizzando il
metodo di Fourier prevede 3 fasi di applicazione dei gradienti Gz, Gy e Gx prima di procedere alla
misurazione del FID:
a) la preparazione, che consiste nella selezione di una particolare sezione assiale (ovvero la
scelta di un piano normale alla coordinata z e parallelo a quello xy, individuato da una
particolare z)
b) l’evoluzione, che consiste nella codifica in fase di una delle due coordinate del suddetto
piano (per esempio la y)
c) la lettura, ovvero la codifica in frequenza della coordinata rimanente (nel nostro caso la x)
In questo modo ogni voxel dell’immagine 2D ovvero del piano selezionato alla fase a) puo’ essere
univocamente identificato da una coppia frequenza-fase. L’intero procedimento viene ben riassunto
dal “diagramma temporale degli eventi” (pag. 5, slide 1) che mette in evidenza la sequenzialità della
procedura. Inizialmente si applicano contemporaneamente l’impulso a 90 ed il gradiente su z, Gz;
poi, subito dopo lo spegnimento di questi due, viene applicato solo il gradiente Gy; infine durante
l’applicazione del solo gradiente Gx viene effettuata la misura del segnale di FID.
Dal punto di vista matematico si puo’ rappresentare il segnale FID misurato come:
S(t) = I(x,y) exp j(t + )
in cui:
- l’esponenziale dipende dai valore e e quindi implicitamente dalle componenti sen(x) e
sen(y) (ricordando che si sta misurando un vettore rotante sul piano xy)
- l’intensità’ del segnale e’ diversa per ogni coordinata (x,y): infatti rappresenta
essenzialmente il modulo della componente di M nel piano xy che a sua volta dipende dai 3
parametri , T1, T2.
Le frequenze in gioco sono tutte nell’ordine del MHz (radiofrequenza), una banda abbastanza
problematica per le elaborazioni che verranno fatte al segnale successivamente. Si procede dunque
con una demodulazione (prendendo una frequenza di riferimento r e mescolandola con il segnale
FID) che consente di portare il segnale ad una banda di frequenze più “maneggevole” (banda audio)
detta banda base:
S(t) = I(x,y) exp j[( - r)t + ]
Sapendo come viene acquisito il segnale secondo il procedimento previsto dal metodo di Fourier,
possiamo pensare che ogni singolo voxel in (x,y) dia come contributo al segnale di FID la
pulsazione relativamente alla componente x, e la fase relativamente alla componente y. Fatta
questa considerazione, nulla ci vieta di utilizzare l’espressione precedente per specificare il
contributo del singolo voxel in (x,y) come:
Sxy(t) = I(x,y) exp j[(x - r)t + y]
Ricordando che x = (0 + Gxx) e che y = (0 + Gyy)ty espressioni derivanti rispettivamente
dalla codifica di x con frequenza (lettura) e dalla codifica di y con fase (evoluzione), si riscrive,
sempre per ogni singolo voxel:
Sxy(t) = I(x,y) exp j[(0 - r)t + Gxxt + (0ty + Gyyty)]
Ritornando al segnale S(t) che si misura (il FID) e trascurando il termine costante di fase 0ty si
puo’, teoricamente parlando, pensare che esso non sia altro che l’integrale dei singoli contributi di
ogni voxel dxdy appartenenti al piano xy selezionato in fase di preparazione. Quindi:
S(t) =-+-+ I(x,y) exp j[(0 - r)t + Gxxt + Gyyty)]dxdy
Ora:
-
si sceglie opportunamente il valore della frequenza di demodulazione r, in modo tale che
sia proprio uguale a 0 (frequenza base o “centro” del gradiente);
- si definisce la variabile kx = Gxtx / 2 , considerando tx l’istante al quale misuro il FID;
- si definisce la variabile ky = Gyty / 2 , considerando ty la durata della codifica di fase
ovvero il tempo durante il quale si lascia acceso il gradiente sull’asse y per ottenere
l’accumulo di fase;
Grazie a tali tre posizioni si ottiene una nuova formulazione si S(t), dipendente non più dal tempo t
ma dalle nuove variabili kx e ky, che posso considerare come 2 coordinate:
s(kx, ,ky) =-+-+ I(x,y) exp j2 [kx,x + kyy]dxdy
La funzione s(kx, ,ky), definita nello spazio di coordinate kx e ky, e la funzione I(x,y), definita nello
spazio “reale” di coordinate x e y, sono funzioni legate tra loro da una relazione di trasformazione,
che e’ proprio la trasformata di Fourier. Dalla misurazione del FID ricavo quindi l’informazione
posizionale relativa ad uno spazio fittizio chiamato k-spazio. Da quest’ultimo, mediante trasformata
di Fourier, per ogni piano xy selezionato nel volume d’interesse, si riesce a ricostruire
l’informazione posizionale nello spazio fisico. Ovvero si recupera l’informazione dell’ampiezza del
FID nei vari punti, che sara’ funzione delle variabili o T1 o T2 o varie combinazioni di queste, in
base al tipo di sequenza che si utilizza per l’indagine RMN.
In pratica quello che si fa e’ applicare la trasformata discreta (DFT) alla matrice NxN di elementi
s(kx, ,ky), ottenuta dall’acquisizione di N segnali FID ognuno campionato N volte (sulle righe
saranno i FID e sulle colonne saranno gli i-esimi campioni di ogni FID). I vari campioni stanno a
significare l’acquisizione dei contributi per diversi kx, ovvero dall’acquisizione dei campioni del
FID nei diversi istanti temporali tx. I FID differiscono l’uno dall’altro facendo variare l’altra
variabile, ovvero la ky: per far questo si puo’ agire o sul gradiente Gy o sull’intervallo temporale ty
in su applica il gradiente per la codifica di fase. Di fatto si preferisce far variare il gradiente,
incrementandolo di un certo valore per l’acquisizione di ogni riga della matrice [ s(kx, ,ky) ]. Per
meglio chiarire le idee, dato che ky e’ una frequenza, si puo’ pensare che lungo la y si abbia
l’informazione della frequenza con cui varia la fase: nel nostro caso infatti la fase e’ una variabile
periodica di periodo 2/Gy.
Un esempio semplicistico ma significativo (pag. 6, slide 2) può essere il caso in cui si abbia una
fetta (un piano xy selezionato dalla preparazione) contenente un solo voxel di idrogeno (1H), mentre
tutti gli altri voxel “contengono” vuoto. Nel riquadro a) in alto a sinistra si ha la I(x,y) che si vuole
recuperare/stimare mediante il metodo di Fourier per RMN. Si applica allora tecnica di codifica di
fase sulla y e di codifica di frequenza sulla x per ottenere N segnali FID campionati ognuno N volte,
rappresentati nel riquadro b). Si procede dunque la calcolo della DFT per righe ottenendo per ogni
riga contributi diversi da zero solamente sulla colonna che rappresenta la coordinata x del voxel
(riquadro c)). L’ultimo passo consiste nel calcolo della DFT per colonne che da’ come risultato il
contributo del voxel in y; essendo una sola colonna non nulla si riesce dunque a recuperare
l’informazione spaziale dell’unico elemento di 1H (riquadro d)). L’esempio sembrerebbe riduttivo,
ma si presta molto bene come riprova (simulazione) per un’eventuale realizzazione in MatLab
dell’algoritmo.
Magnetofarmaci
slides di riferimento: Risonanza magnetica nucleare 4 (nomefile: 14-MRI4[1].pdf)
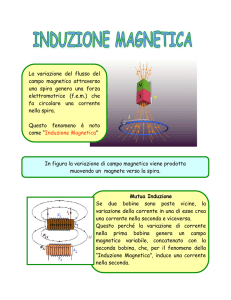
Analogamente a quanto succede nella medicina nucleare, anche in risonanza magnetica si prevede
l’uso di sostanze di contrasto dette magnetofarmaci (pag. 1, slide 2). Questi alterano il
comportamento magnetico dei tessuti in cui si fissano: hanno la funzione di aumentare la differenza
d’intensità’ dei segnali che si misurano nelle diverse zone d’interesse. L’effetto e’ quello di
introdurre una suscettibilità magnetica specifica in certe regioni, che normalmente reagirebbero alla
RMN in maniera troppo simile alle circostanti, permettendone il riconoscimento. Essi danno un
contributo al campo magnetico B che e’ proporzionale al campo presente (B0) e che va sommato
al valore del parametro proprio del materiale che si sta utilizzando ( B = B0 + ΔB = B0 + xB0 =
B0(1+ x), con x la sucettibilità magnetica del magnetofarmaco).
Si distinguono due tipi di materiale per magnetofarmaci: quelli che hanno un valore positivo e
quelli che hanno un valore negativo di suscettibilità magnetica: rispettivamente sono i
paramagnetici e i superparamagnetici. Dal punto di vista pratico, l’utilizzo di questi materiali riduce
i valori o di T1 o di T2.
I paramagnetici (come ad esempio il Gd) servono a ridurre il T1, con l’effetto di velocizzare
il rilassamento longitudinale rafforzando il segnale FID.
I superparamagnetici (come ad esempio gli ossidi di ferro) servono invece a ridurre
prevalentemente T2, con l’effetto di velocizzare il rilassamento spin-spin e riducendo quindi
l’intensità’ del segnale FID.
Dalla figura si vede come si sia potuto aumentare il contrasto nell’immagine ottenuta secondo il
metodo standard in confronto a quella ottenuta con l’utilizzo del magnetofarmaci.
Tecniche “multi-slice”
(pag. 2, slide 1) Normalmente il tempo necessario per sostenere un esame RMN sarebbe oltremodo
elevato (1,7 ore di durata). Domandiamoci quali siano i parametri di un esame NMR e come si li
possa gestire per ridurre la durata dell’applicazione in maniera efficiente. Tutte le tecniche viste
fin’ora posseggono un tempo di ripetizione Tr che di solito viene preso con un valore adeguato
(sufficiente) a far va si’ che si ripristini quasi completamente (completamente dal punto di vista
pratico) la componente lungo l’asse z. Nell’ipotesi che si abbia un T1 nell’ordine dei 300 ms, perché
si ripristini la componente lungo l’asse z occorre aspettare circa 4,5,6 volte T1 ovvero fino a 1,5
secondi (la minima durata con cui si puo’ scegliere dunque Tr). Si e’ visto precedentemente che per
fare una codifica di fase e frequenza occorre ripetere la misura del FID N volte, per esempio
N=128. Occorreranno dunque 128 misure per il riempimento della matrice [ s(kx, ,ky) ] di
dimensione NxN (si noti che il prelievo degli N campioni per ogni FID non porta via alcun tempo).
Inoltre, per esigenze di SNR (rapporto segnale disturbo) in realtà si deve ripetere almeno due volte
la misurazione di ogni FID. Si rammenti infine che per la ricostruzione dell’intero volume di
interesse occorre riunire l’informazione di ogni piano selezionato in fase di preparazione (per
esempio si abbia a che fare con 16 “fette”).
Riassumendo:
tempo di ripetizione (secondi)
numero di valori discreti di y
ripetizione per diminuire l’SNR
numero di piani z = cost
totale (secondi)
1,5 x
128 x
2x
16 =
3072
ovvero 1,7 ore
In realtà il tempo di acquisizione del segnale e’ di circa 10 ms. Il resto del tempo occorre solamente
ad attendere il pieno recupero della componente del vettore M lungo lasse z.
La tecnica multi-slice consiste di utilizzare in maniera un po’ più furba questo tempo di
sospensione. Dopo che si e’ effettuata la misura del primo FID sul primo piano, si lascia che venga
recuperata in evoluzione libera la componente su z, ma nel mentre ci si sposta sulla fetta successiva,
sollecitandola per una nuova misura del FID. Si opera, per così dire , in parallelo sollecitando volta
per volta i piani che sono disponibili alla misurazione, mentre quelli appena sollecitati recuperano la
loro componente. Il risultato e’ che la durata dell’esame si riduce all’incirca a 8,10,12 minuti, tempo
ancora abbastanza elevato se confrontato a quello di tante altre tecniche, ma decisamente più
accettabile rispetto a prima.
Strumentazione RMN
Lo strumento che permette di mettere in atto la risonanza magnetica nucleare puo’ essere
rappresentato da uno schema a blocchi tipo quello a pag. 2, slide 2.
In figura 1 e 2 sono rappresentati due strumenti di RMN dall’aspetto diverso. Il primo e’ destinato a
delle indagini che riguardano l’intero corpo umano: il paziente viene messo in un lettino che
durante l’esame si sposterà all’interno della cavità in cui e’ presente il campo magnetico. Il secondo
(detto del tipo “a magnete aperto”) viene utilizzato solamente per risonanza agli arti, consentendo
un’acquisizione sicuramente più comoda, esentando il paziente dalla pressione psicologica che il
cunicolo del primo macchinario potrebbe compiere.
Le componenti principali dello strumento NMR sono:
- il magnete che genera il campo costante ad alta intensità che provoca il fenomeno
- le bobine dei gradienti che creano l’aggiunta a B0 nelle varie direzioni
- la bobina che genera il campo magnetico a radiofrequenza B1 che e’ la stessa che serve poi
a rilevare il FID (come negli ultrasuoni si utilizza o stesso dispositivo sia come
sorgente/trasmettitore che come rilevatore). Nella primo caso si deve fornire corrente
elettrica, nel secondo caso si puo’ misurare una caduta di tensione ai capi della bobina.
- dispositivi ed elettronica di comando dell’apparecchiatura
- il calcolatore (a monte dell’elettronica) che permette sia d’impostare i valori in base ai quali
l’elettronica di comando agisce sulle bobine, sia si occupa dell’elaborazione dei dati ricavati
per la proiezione dell’immagine sullo schermo della consolle.
Il magnete
Inizialmente veniva utilizzato un magnete permanente (pag. 3, slide 1), ovvero magneti costruiti con
un nucleo di materiale ferromagnetico -cioè magnetico per sua natura-. Tra i due poli Nord e Sud
era presente il campo magnetico. Con questo tipo di magnete si potevano generare campi
dall’intensità’ “piuttosto bassa”, al massimo 0,2-0,3 Tesla. Erano, oltre che ingombranti, pesanti al
punto di raggiungere un centinaio di tonnellate.
Ricordando che il rapporto segnale-disturbo e’ tanto più elevato quanto lo e’ la frequenza di
precessione degli spin, a sua volta proporzionale all’intensità’ del campo magnetico generato. Di
conseguenza tale tipo di magnete e’ al giorno d’oggi utilizzato solo in rare applicazioni specifiche.
Il vantaggio di questi magneti e’ quello di non creare un campo magnetico esterno: esso e’ presente
solamente all’interno della regione d’interesse, escludendo la necessità di creare delle schermature
magnetiche.
Altra possibilità e’ quella di utilizzare magneti elettroresistivi, costituiti da un avvolgimento, un
nucleo ferromagnetico in cui una corrente che circola crea il campo elettromagnetico. L’intensità’
resta comunque molto bassa, essendo nell’ordine dei 0,2 Tesla, anche se rispetto ai magneti
precedenti il peso risulta considerevolmente più basso (5 tonnellate). Il problema principale sta nei
consumi elevatissimi: per creare un’intensità di campo utile, occorre fornire all’elettromagnete una
considerevole quantità di corrente, generando inevitabilmente un calore molto elevato per effetto
Joule. Occorre dunque utilizzare dei sistemi di smaltimento del calore particolarmente efficaci,
ingombranti e costosi.
L’ultima tecnologia disponibile, quella utilizzata al giorno d’oggi, e’ quella detta “a
superconduzione” (pag. 3, slide 2). I magneti a superconduzione sfruttano il fenomeno fisico per il
quale alcune leghe metalliche, se portate a temperature estremamente basse (qualche grado Kelvin,
tra gli 8 e i 10), esibiscono una resistenza elettrica nulla. La corrente elettrica che circola in un
circuito di tali leghe in queste condizioni, non incontra resistenza che “freni” tale flusso di cariche.
Se dunque si applica una certa forza elettromotrice per un dato intervallo di tempo, la corrente
elettrica continua a circolare anche dopo che si e’ interrotto il trasferimento di energia.
In risonanza magnetica si sfrutta tale fenomeno: si creano delle bobine di niobio o titanio dalla
lunghezza di circa 65 Km, si applica un’alimentazione abbastanza consistente (corrente nell’ordine
dei 200 A) che poi viene staccata. Il vantaggio non sta solo nella mancato consumo di energia, ma
anche nella scarsa necessità di manutenzione, che consiste solamente nel controllo della
temperatura e nel rifornimento/ricambio dell’elio liquido che consente il raggiungimento della
temperatura adatta.
Il criostato (frigorifero) e’ costituito da tre involucri uno dentro all’altro: quello più interno (che a
sua volta contiene le bobine) viene riempito di elio liquido a 4,2K; quello intermedio e’ riempito
invece da azoto liquido a 77K; infine e’ presente uno strato di vuoto che isola ulteriormente il
sistema dall’esterno. Questa struttura ad “ammortizzatore termico” e’ stata pensata per evitare il
brusco gap di temperatura tra ambiente (298K) e avvolgimento interno.
Con tale tecnologia e’ possibile creare campi elettromagnetici molto intensi: in campo clinico le
apparecchiature girano attorno i 1-4 Tesla, mentre in laboratorio di ricerca si e’ arrivati fino ai 7-8
Tesla. Inoltre si riesce a mantenere estremamente bassa la disomogeneità spaziale, che e’
nell’ordine di “una parte per milione” (1 ppm). L’unico problema sta nel fatto che il magnete crea
un campo magnetico considerevole anche nella regione circostante a quella di interesse. Al
problema si ovvia impiegando l’apparecchiatura in una stanza appositamente progettata in modo
tale da fornire una schermatura elettromagnetica notevole, in grado cioè di evitare che il campo
contamini l’ambiente esterno e quindi ci siano influenze verso l’interno laddove si sta eseguendo
l’esame.
Componenti per ridurre l’inomogeneità di B0
L’inomogeneità del campo B0 e’ principalmente legata al numero di bobine con cui lo genero (pag.
4, slide 1). Il campo generato da 1 bobina e’ costituito da un B costante a cui si sovrappongono
infinite armoniche sferiche di ordine superiore. Queste armoniche sono spazio-varianti e,
sovrapponendosi al campo B costante nello spazio, danno un contributo spazio variante anch’esso,
compromettendo la funzionalità dell’apparecchio. Utilizzando 2 bobine in coppia di Helmholtz (con
un certo rapporto tra diametro e distanza tra queste) possono essere eliminate le armoniche del 2 e
del 3 ordine. Utilizzando 6 bobine (MRI), con una certa disposizione spaziale, si ottiene
l’eliminazione delle armoniche fino al 12 ordine, rimanendo solo quelle di ordine talmente alto da
ritenere trascurabile il loro effetto. La strumentazione utilizzata al giorno d’oggi prevede appunto
l’utilizzo di 6 bobine, tutte localizzate nella zona più interna al criostato.
Un altro modo per rendere il più omogeneo possibile il campo magnetico e’ quello di utilizzare le
cosiddette tecniche di “shiming”. Nel caso “attivo” queste consistono nell’utilizzo di bobine esterne
che vengono dimensionate opportunamente in modo da compensare il contributo offerto dalle
armoniche di ordine superiore al primo. Esse vengono posizionate in fase di montaggio nella
maniera tale da compensare il più efficacemente possibile tali armoniche, e vengono poi mantenute
in tale posizione. L’altra possibilità, il caso “passivo”, consiste nell’utilizzo di nuclei di ferrite che,
posizionati in maniera opportuna, alterano il campo elettromagnetico in modo tale da ridurre al
minimo le disomogeneità. Questi vengono utilizzati localmente (non al livello del magnete, ma al
livello della singola struttura ubicata in un certo ospedale) soprattutto per compensare il contributo
di certe masse metalliche presenti nell’intorno della stanza della RMN (presenza di altre particolari
apparecchiature).
Magneti per i gradienti
Il campo elettromagnetico generato per i gradienti varia nell’ordine dei mT, grandezze decisamente
più “ragionevoli” rispetto al B0. Le 3 paia di bobine ortogonali per la creazione dei gradienti e’
dunque normalmente costituita da elettromagneti. L’importante e’ avere a disposizione degli
alimentatori abbastanza veloci nello switch (tempo di accensione-spegnimento), poiché i gradienti
devono durare un certo intervallo di tempo ben definito (si parla dunque di switch da 1ms).
Bobina per il campo a radiofrequenza
Sono bobine, tutto sommato, usuali. L’unico accorgimento a cui bisogna prestare attenzione e’ il
fatto che devono essere il più possibile vicine alla regione interessata. Si vedano i vari esempi nelle
figura a pag. 4, slide 2.