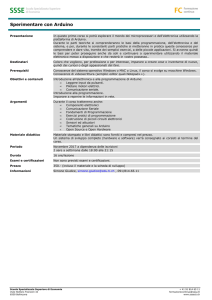
La scheda Arduino Uno
IL MICROCONTROLLORE
La scheda Arduino si concentra attorno ad un microcontrollore Atmega 328. Questo non è altro che
il grosso integrato a 28 piedini, che sostanzialmente svolge e/o coordina tutte le operazioni
realizzate dalla scheda Arduino.
Questo microcontrollore ha un parallelismo interno a 8 bit (cioè lavora su un byte alla volta), ha 20
piedini di ingresso/uscita ed è dotato delle seguenti memorie:
memoria di programma FLASH da 32 KB: qui sarà memorizzato il programma scritto. Di
questa memoria 0,5 KB sono riservati al bootloader (cioè al sistema base che rende Arduino
utilizzabile e che gli permette di ricevere ed eseguire i nostri “sketch”)
Memoria dati volatile SRAM da 2 KB : qui saranno salvati i dati “volatili”
Memoria Eeprom da 1KB: qui è possibile salvare in modo permanente eventuali dati che
devono restar memorizzati anche se dovesse venire a mancare l'alimentazione del sistema
(per
ulteriori
dettagli
su
come
fare
potete
consultare
http://www.mauroalfieri.it/elettronica/tutorial-usare-la-eeprom-di-arduino.html).
Il Clock del sistema è di 16 Mhz (viene generato da un apposito circuito presente sulla scheda)
ALIMENTAZIONE
La scheda Arduino per funzionare correttamente necessita di una tensione di alimentazione di 5 V.
Questa può essere fornita in due modi (in realtà tre, ma due sono equivalenti):
attraverso la porta USB collegata ad un PC. La porta USB dei PC (e di qualsiasi altro
dispositivo connesso ad una sua alimentazione) ha la caratteristica di fornire una tensione
stabile proprio di 5V
attraverso il connettore Jack dove va fornita una tensione tra i 7 e i 12 V (che sarà poi
convertita opportunamente nei 5V necessari) plausibilmente ottenuta da un normale
alimentatore AC/DC. Questa metodo può effettuarsi anche applicando la tensione
direttamente sui terminali VIN e GND presenti sul connettore marcato con Power (nella
parte basa della figura). Se si utilizza questo tipo di alimentazione viene automaticamente
esclusa quella eventuale ricevuta dalla porta USB.
INGRESSI E USCITE
Ingressi/uscite digitali
Arduino dispone di 14 pin utilizzabili come ingressi o uscite (pin da 0 a 13)
Per utilizzare questi pin occorre prima specificare il modo di funzionamento con i seguenti
comandi:
pinMode(pin, OUTPUT);
pinMode(pin, INPUT);
la variabile pin dovrà contenere ovviamente un numero valido di un piedino. In alternativa si può
indicare direttamente il numero del piedino.
Se un determinato Pin è impostato come uscita, il suo livello può essere impostato come alto o
basso con i seguenti comandi
digitalWrite(pin,HIGH);
digitalWrite(pin,LOW);
Se invece un pin è impostato come ingresso è possibile leggerne il relativo valore e assegnarlo ad
una opportuna variabile con il seguente comando:
val = digitalRead(pin);
Nota Bene: I livelli di tensione utilizzati sono 0 e 5V, le correnti erogate o assorbite dai piedini
sono al massimo di 40 mA.
Ingressi/uscite analogici
Su di un apposito connettore sono disponibili 6 ingressi analogici indicati da A0 ad A5
Questi piedini possono ricevere in ingresso valori analogici variabili tra 0V e 5V e convertirli
proporzionalmente in un valore numerico compreso tra 0 e 1023 (quindi ad esempio se in
ingresso è presente 2,5 V il corrispondente valore sarà 511)
Per leggere il dato presente su questi piedini occorre effettuare il seguente comando:
val = analogRead(pin)
dove pin dovrà essere il numero di uno dei 6 piedini (da 0 a 5 quindi)
Per effettuare la scrittura di un dato analogico si può usare la tecnica PWM disponibile sui piedini
3, 5,6 9,10 e 11, opportunamente marcati
Questa tecnica consiste nel variare il Duty Cycle di un'onda quadra, producendo di fatto una
opportuna variazione del suo valore medio tra 0 e 5V
Il comando da utilizzare è il seguente:
analogWrite(pin,valore);
il parametro valore deve essere compreso tra 0 e 255 e produrrà un valore analogico in modo
proporzionale tra 0 e 5V
GESTIONE DELLA PORTA USB
Per effettuare la comunicazione attraverso la porta seriale USB occorre come prima cosa attivarla,
specificando la velocità di comunicazione in bit al secondo con un comando del tipo:
Serial.begin(9600);
per le comunicazioni con un pc la velocità di comunicazione di 9600 bit per secondo è abbastanza
comune ma si possono impostare velocità diverse.
Per inviare i dati da Arduino al PC (o altro dispositivo) il comando da utilizzare è:
Serial.print(dato)
dove dato può essere o direttamente un 'valore' o una variabile
Con print() i numeri sono stampati utilizzando un carattere ASCII per ogni cifra, i float allo stesso
modo ma con solo due numeri decimali, caratteri e stringhe vengono stampate senza nessuna
conversione.
Esempi:
Comando nel programma
Cosa viene stampato sullo schermo
Serial.print(35)
35
Serial.print(9.123456)
9.12
Serial.print(‘X’)
X
Serial.print(“una frase a caso”)
una frase a caso
Se invece del comando Serial.print(dato) si utilizza Serial.println(dato) al termine di ogni riga si
viene inviati a capo (Serial.print al contrario non lo fa quindi viene tutto scritto di fila anche usando
diversi comandi Serial.print uno dopo l'altro)
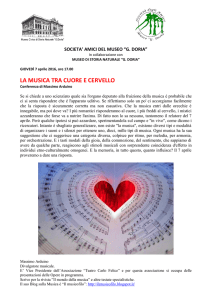
Per visualizzare i dati ricevuti dalla porta USB sullo schermo del computer occorre aprire
l'opportuna interfaccia dal programma di sviluppo di Arduino, chiamata monitor seriale, come
mostrato in figura
Per ricevere i dati dalla seriale bisogna come prima cosa verificare che sia stato ricevuto un dato
con il comando Serial.available che ci dice quanti dati sono in attesa di essere letti. Se ci sono dati
in attesa allora si potranno leggere con il comando Serial.read
Esempio
Serial.begin(9600);
if (Serial.available()>0) {
A=Serial.read();
ALTRI COMANDI COMUNI
delay(tempo)
genera un ritardo espresso in millisecondi
delayMicrosecond(tempo)
genera un ritardo espresso in microsecondi
tone (pin, frequenza, durata) genera sul pin indicato un tono della frequenza e durata indicata: la
frequenza è espressa in Hz, la durata in millisecondi
noTone(pin)
interrompe la generazione del tono
CONTROLLO DI UN SERVOMOTORE
Per pilotare un semplice servomotore con Arduino occorre come prima cosa utilizzare l'opportuna
libreria
#include <Servo.h>
Quindi in fase di dichiarazione delle variabili va dichiarata una opportuna variabile di tipo servo:
Servo servomotore1;
Quindi nella procedura setup va dichiarato a quale piedino va collegato il servomotore
(similarmente al comando pinMode quando utilizziamo Led in uscita o tasti in ingresso)
Void Setup(){
servomotore1.attach(4);
}
Il piedino utilizzato può essere uno qualsiasi dei piedini digitali. A questo piedino va connesso uno
dei tre contatti del servomotore (il filo di controllo che tipicamente è di colore giallo). I restanti due
fili del servomotore sono la sua alimentazione che va opportunamente connessa
Per far muovere il servomotore nella procedura Loop si utilizzerà un opportuno comando per
specificare l'angolo di rotazione del servomotore:
servomotore1.write(angolo)
ho scritto servomotore1 sempre in rosso per far presente che quello è il nome della variabile
scelto... se avessimo scelto come nome della variabile “motorino” i comandi sarebbero stati
ripettivamente
Servo motorino;
motorino.attach(4);
motorino.write(angolo);
Va tenuto presente che alcuni servomotori funzionano in modo leggermente differente, andando in
rotazione continua a una velocità che può essere impostata.
Per tali servomori il comando servomotore1.write(angolo) funzionerebbe nel seguente modo:
quando angolo = 0 si ha rotazione a velocità massima in un senso
quando angolo = 90 il servomotore resta fermo
quando angolo = 180 si ha rotazione a velocità massima nel senso opposto
ovviamente sono possibili valori intermedi in modo proporzionale
Per sapere se il servomotore che si sta utilizzando è di un tipo o dell'altro occorre consultare il
relativo datasheet
Esempio di programma per pilotare un servomotore:
Questo programmino fa girare il
servomotore di un grado ogni 15
millesecondi, usando un ciclo for
#include <Servo.h>
Servo myservo;
int pos = 0;
void setup()
{
myservo.attach(9);
}
void loop()
{
for(pos = 0; pos < 180; pos += 1)
{
myservo.write(pos);
delay(15);
}
}
SCHEDE AGGIUNTIVE
Esistono schede aggiuntive che possono essere gestite
con Arduino come ad esempio:
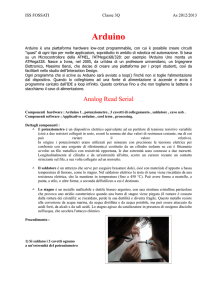
ULTRASUONI:
Questo tipo di schede è dotato di un trasmettitore e un
ricevitore di ultrasuoni. In base al tempo che un'onda
emessa impiega per tornare indietro si può stabilire la
distanza di un eventuale oggetto presente davanti al
sensore
Esistono diverse schede di questo tipo come ad esempio la HC SR04
Questa scheda ha 2 pin di alimentazione, uno per farle inviare impulsi (trigger) e uno per leggere
impulsi di ritorno (echo)
Per farla funzionare correttamente occorre inviare sul piedino di output di arduino connesso al pin
trigger della scheda un impulso alto di durata superiore ai 10 microsecondi, ad esempio:
digitalWrite( trigger, HIGH );
delayMicroseconds( 15 );
digitalWrite( trigger, LOW );
Dove trigger è il piedino di output
La scheda risponderà quindi sul suo piedino echo con un impulso di durata proporzionale al tempo
necessario per avere un'onda di ritorno.
Per interpretare correttamente questo dato occorre usare il seguente comando
durata = pulseIn( echo, HIGH )
volendo sapere la distanza dell'oggetto in centimetri occorre sviluppare una formula che tenga in
conto della velocità del suono... fortunatamente qualcuno ha già fatto i calcoli è la formula sarà:
distanza = 0.034 * durata / 2;
Maggiori dettagli alla pagina
https://barcadero.wordpress.com/2012/02/14/sensore-a-ultrasuoni-hc-sr04-e-arduino/
Esistono diversi altri tipi di schede a ultrasuoni, ma il funzionamento e l'utilizzo sarà del tutto
similare a quello della SR04
LCD:
Per il controllo dei display LCD vi rimando direttamente ai tutorial di Arduino o alla seguente
pagina (che essendo in italiano sicuramente sarà più comprensibile per la maggior parte di voi)
http://www.maffucci.it/2012/02/17/appunti-su-arduino-pilotare-un-display-lcd/
In rete c'è anche un buon video in proposito
https://www.youtube.com/watch?v=Q0oW7QcORW8
Il tutto ovviamente si baserà sull'utilizzo della libreria LiquidCrystal.h
MOTOR SHIELD
In questo caso si tratta di una scheda che va montata direttamente sopra Arduino e permette di
pilotare motori in continua.
Vi rimando alla pagina seguente per ulteriori dettagli di come fare
http://www.logicaprogrammabile.it/motor-shield-arduino-netduino/
GLOSSARIO
Sketck: si tratta del programma scritto per Arduino, nel suo linguaggio specifico che è di
derivazione dal linguaggio C, mantenendone tutte le strutture sintattiche e di controllo.
Classificazione delle Memorie
RAM :
Random Access Memory: Memoria ad accesso Casuale: è la memoria volatile (il dato
viene perso quando si toglie l'alimentazione) che può essere sia scritta che letta. Il fatto
che la memoria sia ad accesso casuale vuol dire che alla memoria si può accedere in
qualsiasi punto sempre nello stesso tempo (al contrario nelle memorie ad accesso
seriale questo non è vero, dovendo prima 'arrivare' al punto della memoria che ci
interessa, come ad esempio sui vecchi nastri magnetici)
SRAM:
Static RAM: si tratta di una memoria RAM statica, realizzata sostanzialmente con un
gran numero di flip flop D, e pertanto tipicamente abbastanza 'lente'
DRAM
Dynamic RAM: memorie RAM di tipo dinamico, realizzate sfruttando fenomeni
capacitivi all'interno dei transistor. Poiché i condensatori tendono a scaricarsi (e quindi
si ha la tendenza a perdere il dato in essi memorizzato) c'è bisogno ogni tanto di
ricaricarli al valore opportuno effettuando quella che viene chiamata operazione di
REFRESH. Questo svantaggio è largamente compensato dalla loro elevata velocità di
funzionamento
ROM
Read Only Memory: Memorie di sola lettura. Sono di tipo permanente (cioè i dati in
esse contenuti non vanno persi quando si toglie l'alimentazione). Sotto il punto di vista
della modalità di accesso anche queste sono ad accesso casuale e quindi il tempo di
accesso in qualsiasi punto della memoria è sempre lo stesso
PROM
Programmable ROM. Sono memorie ROM che possono essere Scritte una sola volta
dall'utente. Vengono acquistate completamente vuote e l'utente, attraverso opportune
procedure (che richiedono opportuni apparecchi) può inserirvi
EPROM Erasable PROM: sono memorie ROM riscrivibili. Per poterle scrivere vanno prima
cancellate attraverso un opportuno procedimento (tipicamente esposizione della parte
interna del chip alla luce ultravioletta)
EEPROM Electically Erasable PROM. La cancellazione e scrittura della memoria viene effettuata
tutta elettricamente (tipicamente usando livelli di tensioni più elevati rispetto a quelli
usati normalmente per la lettura)