Teorie fisiche, 1° principio della dinamica ed altro (parte 2)
01 - Eratostene (III sec. a.C.) : misura della circonferenza terrestre.
Il metodo per misurare la circonferenza della terra di Eratostene portò ad un risultato piuttosto
preciso,
considerati i tempi. Esso si basa su considerazioni geometriche molto semplici. Le mostriamo qui
descritte senza riportare i dati numerici in possesso di Eratostene né il valore numerico del risultato
finale. Riportiamo quindi il solo procedimento.
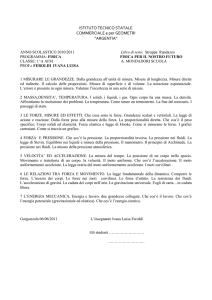
Eratostene sapeva che le città di Alessandria d'Egitto e Siene (l'attuale Assuan) sono pressoché sullo
stesso meridiano terrestre e sapeva che Siene si trova sul tropico del cancro.
Egli conosceva anche la distanza fra le due città. Indichiamo questa distanza con d ed indichiamo
con
c la lunghezza della circonferenza terrestre.
Il giorno del solstizio d'estate il sole, a mezzogiorno, è a picco sulla città di Siene (la verifica
empirica
di ciò la si ottiene se si vede l'immagine del sole rispecchiata in fondo ad un pozzo abbastanza
profondo).
Orbene un giorno di solstizio d'estate, Eratostene misurò ad Alessandria l'angolo che i raggi di luce
del sole formavano con un asta verticale al terreno. Chiamiamo α quest'angolo (misurato in gradi)
e
notiamo che esso è uguale all'angolo formato al centro della terra O dai reagi così come mostrato
in figura. L'uguaglianza di questi due angoli dipende dal fatto che i raggi di luce che provengono
dal
sole ed illuminano la terra sono, essendo il sole molto distante, fra loro paralleli.
Infine, conoscendo d ed α , ricordando che la misura dell'intero angolo giro è 360° , si può
scrivere
la proporzione :
d : c = α : 360°
da cui si ottiene :
c = d · 360° / α che dà appunto la misura della lunghezza della circonferenza terrestre cercata.
1
02 - Ancora sui sistemi di riferimento inerziali e non.
In fisica, per descrivere il moto dei corpi, è necessario definire un sistema di riferimento. Non
esiste,
infatti, il moto "assoluto".
Normalmente, si sceglie un sistema tridimensionale formato da tre assi cartesiani perpendicolari
(ortogonali) a cui rapportare le posizioni (coordinate) dei corpi. Assieme a questo sistema di
riferimento spaziale occorre scegliere un cronometro per misurare il tempo.
Per semplificare, supponiamo ora di considerare un sistema di riferimento bidimensionale (lo
"quadrettiamo" per comodità) e rapportare ad esso il moto di un corpo che si muove su di un
piano.
Rispetto a questo sistema di riferimento si possono avere in sintesi le seguenti possibilità (il corpo
in
questione è rappresentato da un quadretto nero ed il tempo intercorso tra la posizione del corpo in
un quadretto e la posizione in quello successivo è sempre di un secondo) :
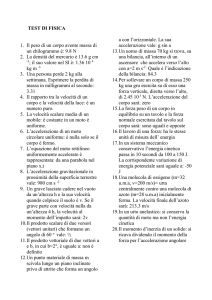
- 1 - corpo in quiete (la sua posizione, cioè le sue coordinate x y , non cambiano col tempo) :
2
- 2 - corpo in moto rettilineo uniforme (in tempi uguali compie spazi uguali) :
anche obliquamente :
- 3 - moto rettilineo accelerato positivamente (la velocità aumenta) :
3
- 4 - moto rettilineo accelerato negativamente o decelerato (la velocità diminuisce) :
- 5 - moto vario :
Se sul corpo non agiscono forze (o la loro risultante è nulla) ed il corpo è inizialmente fermo,
esso rimane fermo (rispetto al sistema di riferimento scelto). Se sul corpo non agiscono forze
(o la loro risultante è nulla) ed il corpo è in moto, esso prosegue di moto rettilineo uniforme
(rispetto al sistema di riferimento scelto). Questo è il principio d'inerzia (o primo principio
della dinamica) ed i sistemi di riferimento rispetto ai quali si verifica ciò si dicono sistemi di
riferimento inerziali.
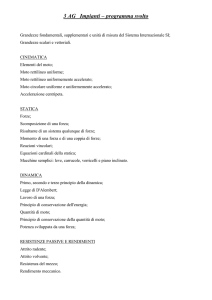
Consideriamo ora un autobus sul pavimento del quale è disegnato un sistema di riferimento
bidimensionale (del tipo sopra rappresentato). Supponiamo anche che l'autobus sia privo di
sedili ed il suo pavimento sia completamente liscio (questo per ridurre al minimio gli attriti che
complicano e disturbano sempre le osservazioni e le misure fisiche).
4
Supponiamo che sull'autobus vi siano corpi di massa diversa (per esempio i corpi A , B e C ).
Supponiamo che l'autobus sia fermo e che i tre corpi siano fermi rispetto ad esso.
Supponiamo che l'autobus successivamente esegua una partenza brusca :
Rispetto al sistema di riferimento solidale con l'autobus, i tre corpi A , B e C subiranno la stessa
accelerazione, opposta a quella dell'autobus che sta partendo. I tre corpi verranno sbalzati verso il
fondo dell'autobus movendosi allo stesso modo (sempre rispetto all'autobus) indipendentemente
dalla loro massa (gli attriti sono ridotti al minimo a causa del pavimento liscio).
Supponiamo ora che l'autobus si muova di moto rettilineo uniforme e che i tre corpi A , B e C
siano in quiete rispetto ad esso.
Supponiamo poi che l'autobus esegua una frenata brusca :
Come nel caso precedente, i tre corpi A , B e C subiranno la stessa accelerazione, opposta a
quella dell'autobus. I tre corpi verranno sbalzati in avanti movendosi allo stesso modo (sempre
rispetto all'autobus) indipendentemente dalla loro massa (gli attriti sono ridotti al minimo a causa
del pavimento liscio).
In entrambi gli esempi, rispetto al sistema di riferimento solidale con l'autobus, ad un tratto e senza
l'azione di una forza reale (gravitazionale, elettromagnetica o nucleare) i corpi A , B e C
cambiano
il loro stato di moto. Da fermi (rispetto all'autobus) improvvisamente si mettono in moto.
5
In questi due esempi il principio d'inerzia viene violato ed il sistema di riferimento in esame non è
un
sistema di riferimento inerziale. I corpi, in esso, sembrano soggetti a forze non reali che per questo
motivo si dicono apparenti.
Sottolineiamo infine ancora una volta che le accelerazioni a cui sono soggetti i corpi (che non sono
sottoposti ad altre forze reali) sono indipendenti dalle masse. Questo fatto è di estreme importanza
e costituisce il punto di partenza della costruzione della teoria della relatività generale.
Meccanica Quantistica
Fra tutte le teorie quantistiche riportiamo qui quella che ne costituisce il nucleo, la meccanica
quantistica.
Essa si basa essenzialmente sui seguenti principi :
-1-
Principio di indeterminazione (Heinsenberg, 1927) : non si possono conoscere
contemporaneamente posizione e velocità di un corpo con la precisione che si
desidera. Vi è un limite naturale invalicabile a questa precisione indicato dalla
costante di Planck (circa 10 alla -30).
Questo principio, dal contenuto "drammaticamente" negativo, afferma in altre parole
che all'uomo non è dato di "conoscere" la realtà fisica con la precisione che desidera.
Vi è un limite invalicabile insito nella natura stessa delle cose.
In altre parole, il disturbo apportato ad un sistema dai processi di misura è qualcosa
di non completamente eliminabile.
Per chiarire questo concetto e dare al principio di indeterminazione una giustificazione
concreta supponiamo di volere misurare la posizione di un elettrone. Per potere fare
ciò occorre "illuminarlo" con una raggio di luce. In questo modo si può misurare la sua
posizione.
Per potere misurare la posizione di un elettrone con una certa precisione occorre
illuminarlo con luce di lunghezza d'onda almeno dell'ordine delle dimensioni
dell'elettrone
stesso e per avere una maggiore precisione occorre che la luce abbia una lunghezza
d'onda via via minore.
Se in un'onda diminuiamo la lunghezza d'onda abbiamo in corrispondenza un aumento
della sua frequenza :
6
D'altra parte sappiamo che la luce è costituita da fotoni che non sono altro che
particelle dotate di un'energia pari al prodotto di una costante (la costante di
Planck !) per la frequenza stessa della luce :
E = h · ν (dove E è l'energia, h è la costante di Planck e ν ("ni") è la
frequenza).
Illuminando un elettrone con luce di alta frequenza in pratica lo si bombarda con
particelle dotate di grande energia. Risultato :
nel misurare la posizione dell'elettrone lo disturbiamo a tal punto da imprimergli
una grande energia tale da farlo "sbalzare" con una velocità del tutto imprevedibile
e questo in misura maggiore aumentando la precisione desiderata :
Il principio di indeterminazione può essere anche formulato affermando che i corpi
"microscopici" non compiono traiettorie continue per cui, in meccanica quantistica,
il concetto di traiettoria continua, che è alla base della meccanica classica, decade :
sul movimento dei corpi non si può fare nessuna affermazione deterministica. Al più
si può conoscere la probabilità di trovare (facendo una misura) una particella in un
certo punto dello spazio.
La meccanica quantistica è quindi una teoria probabilistica in cui si può al massimo
determinare (in modo deterministico) la probabilità della posizione di una particella.
Né si deve pensare che le particelle seguono "nascostamente" la meccanica classica
finché
non vengono "disturbate" da una misura. Se fosse così, per esempio, l'atomo non
potrebbe
esistere perché i suoi elettroni, ruotando attorno al nucleo e seguendo la meccanica
classica, dovrebbero, per le leggi della meccanica classica stessa, perdere energia sotto
forma di radiazione elettromagnetica e cadere così nel nucleo (cosa che naturalmente
non accade !).
In meccanica quantistica si deve rinunciare definitivamente ad ogni nozione di moto
in termini di traiettoria continua !!! Al massimo si può pensare che la probabilità di
trovare una particella viaggia nello spazio. E' essa (la probabilità) che segue traiettorie
classiche !!!
7
Nella meccanica quantistica le particelle sono probabilistiche mentre le probabilità
sono deterministiche.
E' ovvio che con il principio di indeterminazione non è possibile costruire nessuna
fisica. Accanto a questo principio ve ne sono altri (riportati qui sotto) dal contenuto
positivo con i quali è possibile costruire una teoria fisica.
-2-
Principio di corrispondenza : la meccanica quantistica non può esistere senza
la meccanica classica. Siccome non si può affermare nulla circa il moto dei corpi
quantistici (microscopici), per misurarne le proprietà dinamiche (posizione, velocità,
energia ecc.) li dobbiamo fare interagire con oggetti classici (macroscopici) che
seguono la meccanica classica e di cui, quindi, sappiamo "tutto". Tramite le
modificazione di questi oggetti classici (detti "strumenti di misura") siamo così in
grado di avere informazioni sugli oggetti quantistici.
-3-
Principio di sovrapposizione : un corpo (od un sistema di corpi) si può trovare
contemporaneamente in più stati. Un corpo può cioè, per esempio, avere
diversi valori di energia. Solo attraverso il processo di misura si determina un
valore ben preciso. Più precisamente, un corpo potrebbe essere in uno stato
corrispondente all'energia 1 ed dall'energia 2 con una probabilità per ciascuno
dei due valori. Potrebbe essere all'energia 1 al 30 % ed all'energia 2 al
70 % . Ciò significa che facendo molte misure, il corpo verrà trovato il 30 %
dei casi con energia 1 ed il 70 % dei casi con energia 2 .
Questi principi sono in apparente antitesi con il "buon senso". La meccanica quantistica è allora
una grande dimostrazione di come il cosiddetto "buon senso" sia erroneo e fuorviante, perché
prodotto dall'esperienza di vita in un ambiente di cui i nostri sensi ne avvertono solo alcuni aspetti.
La meccanica quantistica diventa la meccanica classica se si considera la costante di Planck nulla,
ovvero se si immagina di considerare grande a piacere la precisione con cui misurare posizione e
velocità dei corpi.
Considerando che la costante di Planck è molto piccola, la meccanica classica vale molto bene per
un enorme quantità di fenomeni.
Solo quando ci spingiamo nell'infinitamente piccolo (nel mondo degli atomi e delle particelle) essa
non vale più ed è allora che diventa valida la meccanica quantistica.
8
2° principio della dinamica
01 - Parte 1.
Come abbiamo visto in precedenza, un corpo non soggetto a forze (o per cui la risultante delle
forze
è nulla) procede con velocità costante (in direzione, verso ed intensità) o rimane in quiete (rispetto
ad
un sistema di riferimento inerziale) (primo principio della dinamica).
Domandiamoci ora : cosa succede quando su di un corpo agisce una forza (a risultante non nulla) ?
Possiamo vedere questo con un esperimento in cui ad un corpo libero di muoversi, praticamente
senza
attrito, su di un piano viene impressa una forza costante. Abbiamo tolto (il più possibile, perché
eliminarlo
del tutto è impossibile) l'attrito perché esso è di difficile misurazione per cui, senza il suo disturbo,
possiamo
semplificare le nostre considerazioni.
Studiamo questo moto "fotografando" la posizione del corpo ad intervalli uguali di un secondo.
Supponiamo anche che l'unità di misura dello spazio sia il decimetro :
Essendo il tempo fra una posizione del corpo (indicata dal quadretto nero) e la successiva uguale ad
un secondo, la distanza fra due posizioni corrisponde alla velocità media (spazio / tempo = spazio /
1=
spazio) che ha il corpo fra le suddette posizioni.
Riportiamo su di un grafico velocità-tempo queste velocità medie :
9
Dal grafico si vede bene che ad ogni secondo successivo il corpo aumenta la propria velocità media
di un decimetro al secondo.
Questa variazione costante di velocità nell'unità di tempo la chiamiamo "accelerazione". Possiamo
allora
concludere che un corpo soggetto ad una forza costante possiede un'accelerazione costante e non
una
velocità costante, come si credeva fino a pochi secoli fa
Supponiamo ora di imprimere al corpo una forza doppia. Otteniamo così il grafico :
Riportiamo anche in questo caso le velocità medie fra le posizioni successive nel seguente grafico :
Otteniamo quindi che ad ogni secondo successivo il corpo aumenta la propria velocità media di due
decimetri al secondo.
Possiamo quindi dedurre che se la forza raddoppia, l'accelerazione di conseguenza raddoppia.
La forza, in conclusione, è direttamente proporzionale all'accelerazione che imprime al corpo.
02 - Parte 2.
Abbiamo visto in precedenza che una forza costante produce un aumento continuo della velocità
di un corpo ad essa soggetto. Quando un corpo cambia la propria velocità si dice che accelera.
Desumemmo che una forza costante produce allora una accelerazione costante.
10
Naturalmente consideriamo tutti i moti rispetto ad un sistema di riferimento perché non esiste
il moto "assoluto". Se poi scegliamo un sistema di riferimento inerziale avremo sicuramente
dei vantaggi di semplicità nella descrizione del moto dei corpi.
Tutte le considerazioni che seguiranno saranno allora riferite ad un sistema di riferimento inerziale.
Abbiano anche visto che raddoppiando la forza, il corpo (il medesimo) subisce una accelerazione
doppia, triplicando la forza, l'accelerazione triplica ecc. Possiamo quindi affermare che :
la forza è direttamente proporzionale all'accelerazione.
Ora ci domandiamo : cosa succede se teniamo costante la forza e raddoppiamo la massa del corpo
(ovvero la sua "quantità di materia") ?
Per capire questo potremmo prendere due corpi uguali al corpo del precedente esempio e fonderli,
unirli, assieme.
Intuitivamente possiamo azzardare la risposta. Se la massa raddoppia a parità di forza,
l'accelerazione
si dimezza. Questo risultato è verificabile sperimentalmente in maniera molto semplice. Se poi la
massa
triplicasse, sempre a parità di forza, l'accelerazione diverrebbe un terzo.
Possiamo allora riassumere questo risultato nell'affermazione :
massa ed accelerazione sono grandezze inversamente proporzionali.
I due risultati sopra espressi possono essere sintetizzati da una formula della massima importanza,
fra
le più importanti di tutta la fisica. La formula, dovuta al grande Newton, è :
F=m·a
dove F indica la forza che agisce sul corpo, m la sua massa ed a la sua accelerazione.
Vediamo ora se questa formula "funziona bene", ovvero se è in grado di riportarci i risultati che
abbiamo sopra elencato.
Supponiamo di avere un corpo di massa 2 Kg e che su questo agisca una forza di 10 N (la lettera
N indica l'unità di misura del newton con cui si misurano le forze nel Sistema Internazionale (vedi
più avanti)). Sostituendo nella formula F = m · a (ed intuendo il valore dell'accelerazione)
otteniamo :
10 N = 2 Kg · 5 m/s²
(l'accelerazione, essendo una variazione della velocità nel tempo, si misura in metri al secondo per
secondo, ovvero metri al secondo quadrato (vedi più avanti)).
Se raddoppiamo la forza, a parità di massa, dovremmo ottenere una accelerazione doppia, infatti :
20 N = 2 Kg · 10 m/s² .
11
Se teniamo la forza costante, per esempio 10 N , e l'applichiamo ad un corpo di massa doppia,
quindi 4 Kg, applicando al formula otteniamo :
10 N = 4 Kg · 2.5 m/s² .
Questo è esattamente ciò che ci aspettavamo, raddoppiando la massa, a parità di forza,
l'accelerazione
dimezza.
Abbiamo così dimostrato che la formula che sintetizza il secondo principio della dinamica, F = m ·
a,
è adatta ad esprimere i risultati sperimentali sopra elencati.
Aristotele, nella sua fisica, aveva invece erroneamente affermato che la forza è proporzionale alla
velocità. Cioè :
F=m·v
(dove v esprime la velocità del corpo).
Da questa formula si deduce che se la forza che agisce su un corpo è nulla, la velocità è di
conseguenza
nulla. Aristotele non conosceva il principio d' inerzia !!! Noi invece sappiamo, grazie a Galileo, che
se la
forza è nulla la velocità è costante.
03 - Alcune precisazioni sulle unità di misura sopra usate.
In fisica, ogni grandezza, dovendo esprimere fenomeni sperimentalmente verificabili, cioè
misurabili,
deve essere espressa secondo certe unità di misura. Le unità di misura fisiche sono ovviamente
convenzionali e sono elencate nel cosiddetto Sistema Internazionale.
In fisica vi sono grandezze fondamentali, cioè non esprimibili in funzione di altre grandezze, e
grandezze
derivate, cioè esprimibili in funzione di altre grandezze fondamentali.
La massa è una grandezza fondamentale e la sua unità di misura è il chilogrammo (kg). Il
chilogrammo
è la massa di un certo cilindro di platino-iridio (una lega adatta a conservarsi "immutabile" nel
tempo)
conservato a Parigi.
La velocità si misura in metri al secondo (m/s) (essendo la velocità definibile come spazio / tempo,
dove
spazio e tempo sono grandezze fondamentali).
L'accelerazione si misura in metri al secondo per secondo (m/s²) (essendo l'accelerazione definibile
come
variazione di velocità / tempo, quindi (m/s)/s , ovvero m/s² ).
12
La forza si misura in newton (N).
Per definire il newton si usa la formula F = m · a per cui :
1 N = 1 kg · 1 m / 1 s² .
Per avere un'idea "pratica", intuitiva, di quanto "valga" un newton si può considerare cosa succede
ai
corpi ordinari della nostra esperienza quotidiana qui sulla superficie terrestre, sotto l'effetto della
forza
gravitazionale.
Immaginiamo un corpo della massa di 1 kg. Su di esso agisce la forza di gravità con una forza
che lo attira verso il centro della terra. Questa forza si chiama peso del corpo :
Il corpo in questione, se lasciato cadere sotto l'effetto del suo peso, subisce una accelerazione pari
a circa 9.81 m/s² (questo dato è facilmente ricavabile sperimentalmente). Si ottiene allora :
F = 1 kg · 9.81 m/s²
cioè circa 10 N .
Questo significa che un corpo di 1 kg viene attratto con una forza (il suo peso) pari a circa 10 N.
1 N corrisponderà allora a circa un etto !!! Così abbiamo un'idea di cosa sia 1 N (newton).
04 - Sul concetto di massa.
Grazie alla formula di Newton F = m · a possiamo chiarire meglio il concetto di massa. Già
abbiamo
affermato che la massa di un corpo è la sua "quantità di materia". Il concetto può essere meglio
espresso
affermando che :
la massa esprime la resistenza che un corpo oppone a cambiare il suo stato di moto
ovvero :
13
la massa esprime l'attitudine che ha un corpo a permanere nel suo stato di moto, cioè esprime
la
sua inerzia ai cambiamenti di moto.
Per questi motivi la massa, intesa in questo modo, è detta più esattamente massa inerziale.
05 - Semplici esercizi di applicazione della formula F = m · a .
Consideriamo un corpo di massa m = 1000 kg .
Supponiamo che su di esso agisca una forza costante F . Da misure di spazio e tempo effettuate
sul corpo in questione supponiamo che risulti che esso si muova (rispetto ad un sistema di
riferimento
inerziale) con una accelerazione costante a = 3 m/s² .
Domandiamoci : quanto vale la forza F applicata al corpo ?
Per il secondo principio della dinamica risulta :
F=m·a.
Facendo i calcoli si ottiene allora :
F = 3 · 1000 = 3000 N (newton).
(valendo 1 N circa un etto, questa forza sarà circa 300 chili (nella vecchia unità di misura
chilogrammo peso)).
Supponiamo ora che sullo stesso corpo agisca una forza costante F = 3000 N .
Domandiamoci : a che accelerazione a sarà soggetto il corpo ?
Applicando la medesima formula si ottiene :
3000 = 1000 · a
da cui :
a = 3000 / 1000 = 3 m/s² .
Supponiamo infine che su quel corpo agisca una forza nulla, ovvero F = 0 .
Risulta, sempre applicando la formula F = m · a , allora :
0 = 1000 · a
da cui :
a = 0 / 1000 = 0 m/s² .
L'accelerazione con cui risulta muoversi il corpo è nulla. Questo risultato naturalmente è
14
estendibile
ad un corpo di massa m qualunque. Possiamo cioè affermare che se su un corpo qualunque agisce
una forza nulla ( F = 0 ) l'accelerazione che ne risulta è anch'essa nulla ( a = 0 ).
Cosa significa che un corpo ha accelerazione nulla ?
Un corpo con accelerazione nulla non cambia la propria velocità (l'accelerazione è infatti la
variazione
della velocità nell'unità di tempo) quindi si muove di velocità costante.
Abbiamo visto allora che il secondo principio della dinamica contiene dentro di sé il primo
principio (il principio d'inerzia) come caso particolare per F = 0
Moto uniformemente accelerato
01 - Parte 1.
Supponiamo che su di un corpo agisca una forza costante. Siccome F = m · a , se la forza è
costante,
supponendo che la massa sia anch'essa costante, si avrà che anche l'accelerazione è costante.
Naturalmente l'accelerazione sarà data dalla formula :
a=F/m.
Se l'accelerazione è positiva, il corpo aumenta la propria velocità istante per istante, se è negativa,
esso diminuisce la propria velocità istante per istante (cioè decelera).
Un corpo su cui agisce una forza costante si muove allora con accelerazione costante, cioè si muove
di moto uniformemente accelerato.
Questo tipo di moto è molto importante e vale la pena approfondirlo.
Supponiamo che, osservando un corpo soggetto a moto uniformemente accelerato, si ottenga la
seguente tabella oraria :
t (s)
v (m/s)
0
10
1
13
2
16
3
19
4
22
( t sta per tempo e v sta per velocità).
Consideriamo il moto fra l'istante 1 e l'istante 4 e calcoliamo l'accelerazione fra questi due
istanti.
Poiché l'accelerazione è definita come variazione di velocità nell'unità di tempo, si avrà :
15
,
dove
è la velocità finale (all'istante finale) e
è la velocità iniziale (all'istante iniziale).
Consideriamo ora il moto fra l'istante 0 e l'istante 4 . Si avrà :
.
L'accelerazione non cambia (come dovevamo aspettarci perché il moto è uniformemente accelerato)
e rimane la stessa se si prendono in considerazioni altri istanti e le relative velocità.
Disegniamo ora il grafico orario velocità-tempo di questo moto. Si ottiene così :
Si vede bene che ciò che si ottiene è una retta. Questo perché ad intervalli di tempo uguali
corrispondono variazioni di velocità uguali. Diremo allora che le variazioni di velocità sono
direttamente proporzionali agli intervalli di tempo (raddoppiando gli intervalli di tempo le
variazioni
di velocità raddoppiano, triplicando ... ecc.)
Se la velocità al tempo 0 fosse nulla, il grafico sarebbe del tipo :
dove la retta passa per l'origine. In questo caso velocità e tempi sono direttamente proporzionali.
Se l'accelerazione fosse nulla ( a = 0 ), la velocità sarebbe costante ( v = cost. ) quindi il grafico
16
orario del moto sarebbe del tipo :
ovvero una retta orizzontale.
02 - Parte 2.
Il moto uniformemente accelerato (omettiamo per brevità l'aggettivo rettilineo) è un moto che
avviene con accelerazione costante.
L'accelerazione è il rapporto fra la variazione di velocità ed il tempo in cui avviene questa
variazione per cui :
dove
indica la velocità finale,
considerato.
indica la velocità iniziale e t indica l'intervallo di tempo
L'accelerazione può dirsi anche la variazione della velocità nell'unità di tempo in quanto ogni
numero può può rapportarsi ad 1 . Infatti, se per esempio in 5 secondi avviene una variazione di
velocità di 10 m/s , si ha una accelerazioni pari a 10 / 5 = 2 m/s² che è esattamente uguale a
2 / 1 m/s² , corrispondente cioè ad una variazione di velocità di 2 m/s nell'unità di tempo.
L'accelerazione si misura nel sistema internazionale (S.I.) in m/s² (metri al secondo quadrato).
Si ha un moto uniformemente accelerato quando su di un corpo agisce una forza costante (per
il 2' principio della dinamica, essendo F = m · a ).
Se l'accelerazione è positiva il corpo subisce un aumento uniforme di velocità. Per esempio se
in 5 secondi la velocità passa da 10 m/s a 20 m/s, si ha :
.
Se l'accelerazione è negativa il corpo subisce una diminuzione uniforme di velocità. Per esempio
se in 5 secondi la velocità passa da 20 m/s a 10 m/s, si ha :
17
.
L'accelerazione negativa, nel linguaggio comune, si chiama decelerazione. In fisica si usa però il
solo
temine di accelerazione che può essere quindi positiva o negativa (il caso di accelerazione nulla
corrisponde al moto rettilineo uniforme che quindi è un caso particolare di moto rettilineo
uniformemente accelerato).
I grafici velocità-tempo nei due casi risultano :
Si noti che in entrambi i casi con
corpo al tempo t = 0.
abbiamo indicato la velocità iniziale, ovvero la velocità del
L'equazione velocità-tempo (equazione che lega matematicamente la velocità con il tempo) del
moto uniformemente accelerato è :
.
Questa formula può essere "letta" nel seguente modo :
"in un moto uniformemente accelerato con accelerazione a , la velocità v al tempo t è
uguale alla velocità iniziale al tempo t = 0 più il prodotto dell'accelerazione a per il tempo t
,
essendo tale prodotto la variazione di velocità nel tempo t "
Il fatto che a · t rappresenta la variazione di velocità nel tempo t lo si può comprendere
immediatamente
ricordando che l'accelerazione è la variazione di velocità nell'unità di tempo. Questo significa
che se, per esempio, l'accelerazione fosse a = 2 m/s² , in 5 secondi si avrebbe una variazione di
velocità di 5 · 2 = 10 m/s .
Consideriamo ora l'equazione spazio-tempo (equazione che mette in relazione lo spazio con
il tempo) del moto uniformemente accelerato ed il relativo grafico.
In questa fase del nostro corso non siamo in grado di ricavare la formula di questa equazione
perché
necessiterebbero alcune nozione di calcolo differenziale. Ci limitiamo per il momento a riportare
18
qui il risultato dandone più avanti una giustificazione geometrica.
L'equazione spazio-tempo del moto uniformemente accelerato è :
dove
è lo spazio iniziale al tempo t = 0 ,
è la velocità iniziale sempre al tempo t = 0 ,
a è l'accelerazione del moto e t è il tempo finale. Graficamente, ricordando che stiamo sempre
considerando moti rettilinei, ovvero che avvengono su di una retta :
Al tempo iniziale t = 0 il corpo si trova allo spazio
all'origine
, ovvero ad una distanza
rispetto
dello spazio. In quel medesimo istante iniziale t = 0 il corpo è dotato di una velocità iniziale
.
Dove si troverà il corpo all'istante t ? La risposta è data dall'applicazione della formula data appena
sopra.
Il grafico orario spazio-tempo corrispondente, nei 3 casi con accelerazione positiva,
accelerazione
nulla (moto rettilineo uniforme) ed accelerazione negativa, è :
Si noti che nei casi di accelerazione diversa da 0 (sia positiva che negativa) il grafico non è
rettilineo
19
(è una curva di secondo grado, ovvero una parabola). Si noti anche che la velocità iniziale
esprime
la "pendenza" che le curve hanno all'istante iniziale t = 0 .
Fra non molto, affronteremo in questo corso lo studio analitico delle curve ed allora sarà chiaro il
perché il grafico orario del moto uniformemente accelerato è una parabola.
Per il momento, di questa formula,
geometrica.
, possiamo dare la seguente giustificazione
Per questo occorre fare una considerazione preliminare. Consideriamo un corpo in moto rettilineo
uniforme dotato di velocità
. Il grafico velocità-tempo è come sappiamo :
Osservando il grafico, si può affermare che, essendo lo spazio s percorso dal corpo nel tempo t
uguale a
, questo spazio è uguale all'area del rettangolo indicato in figura :
Questo risultato può essere esteso (omettiamo per semplicità la dimostrazione) anche ad un moto
uniformemente accelerato.
20
Si ha cioè che lo spazio s percorso nel tempo t è uguale all'area del trapezio indicato in figura.
Scomponiamo questa area nella somma delle aree
e
.
Si ha evidentemente :
(area del rettangolo)
e:
(area del triangolo)
in quanto a · t corrisponde alla variazione di velocità fra l'istante iniziale t = 0 e l'istante t
corrispondente alla lunghezza del segmento AB .
Si ottiene quindi infine :
che è la formula cercata (abbiamo aggiunto ovviamente lo spazio iniziale
al tempo t = 0 ).
03 - Esempio di moto rettilineo uniformemente accelerato.
Consideriamo un corpo che cade perché attratto dalla forza gravitazionale terrestre. Poiché questa
forza (che si chiama peso del corpo) è costante in ogni punto, se trascuriamo l'attrito che il corpo
subisce a causa della presenza dell'aria, il corpo cade verso terra movendosi di moto rettilineo
uniformemente accelerato (per il secondo principio della dinamica, F = m · a ).
L'accelerazione con cui un corpo (qualsiasi corpo) cade è a = 9.8 m/s² (circa). Questa
accelerazione
viene denotata di solito con la lettera g .
Consideriamo che il corpo sia all'istante iniziale , t = 0 , ad una certa distanza da terra ed in
quell'istante
esso sia fermo. Consideriamo per comodità l'origine dello spazio s = 0 nel punto stesso in cui si
trova
21
il corpo al tempo t = 0 e l'orientazione della retta dello spazio s diretta verso il basso. Abbiamo
così
definito un sistema di riferimento per il nostro esempio.
La formula che dà lo spazio in funzione del tempo nel moto rettilineo uniformemente accelerato è :
.
Nel nostro caso, al tempo iniziale t = 0 lo spazio iniziale è nullo così come la velocità iniziale per
cui
la formula del moto si riduce a :
.
A questo punto, lasciamo cadere il corpo e contemporaneamente facciamo partire il cronometro.
Usando la suddetta formula e ricordando che a = 9.8 m/s² (circa) otteniamo per i primi 5 secondi
la seguente tabella oraria :
Se riportiamo questi dati in un grafico spazio-tempo otteniamo :
22
Si vede subito che il grafico che si ottiene non è rettilineo perché, accelerando il corpo
uniformemente,
la sua velocità aumenta istante per istante.
La curva che si ottiene è una parabola con concavità rivolta verso l'alto (vedremo quando
studieremo
la geometria analitica cosa si intende esattamente per parabola).
La velocità di questo corpo aumenta ogni istante. Geometricamente la velocità è la pendenza della
curva
che rappresenta il grafico spazio-tempo del moto punto per punto. Questo deriva dal fatto che la
velocità
è definita come il rapporto dello spazio fratto il tempo impiegato a percorrerlo per cui a parità di
tempi, se
la velocità è maggiore, maggiore sarà di conseguenza lo spazio percorso e quindi la pendenza del
grafico :
(qui abbiamo rappresentato le pendenze della curva ai tempi t = 1, 2, 3, 4, 5 evidenziando gli
angoli
che le tangenti alla curva formano con l'asse dei tempi, angoli che risultano crescenti).
Concludiamo questo esempio sottolineando il fatto che il grafico stazio-tempo del moto è curvo ma
che la traiettoria del moto stesso è una retta !!! Questa precisazione è per evitare l'errore che molti
fanno confondendo le due cose. Qui stiamo studiando un moto rettilineo, cioè che avviene su di una
retta.
23
04 - Altro esempio di moto rettilineo uniformemente accelerato.
Consideriamo ora due automobili che si muovono con velocità costante pari a 108 km/h (30 m/s)
lungo una strada rettilinea. Supponiamo che le due auto siano alla distanza di 20 m l'una dall'altra
(consideriamo tale distanza presa fra il davanti di quella che segue e il retro di quella che precede).
Ad un certo istante, che consideriamo per comodità l'istante iniziale t = 0 , la macchina che precede
(la indichiamo con la sigla A1 ) improvvisamente inizia a frenare. Supponiamo che l'auto freni in
modo
costante, con accelerazione negativa costante, e che la frenata duri 5 secondi prima che l'auto sia
completamente ferma.
L'auto che segue, indicata come A2 , supponiamo che inizi a frenare dopo un tempo di reazione di
1 secondo. Supponiamo anche che il "modo" di frenare dell'auto A2 sia lo stesso di quello
dell'auto
A1 .
Prendiamo l'origine dello spazio ( s = 0 ) coincidente con il davanti dell'auto A2 all'istante
iniziale t = 0 .
In questo modo abbiamo completato la definizione del sistema di riferimento.
Cosa succederà ? L'auto A2 tamponerà A1 ?
Questo esempio è molto interessante ed "istruttivo" in quanto ci può fare "meditare" sulla necessità
di porre sempre "opportune" distanze di sicurezza quando si guida !!!
All'istante iniziale t = 0 la situazione delle due auto è quindi la seguente :
Consideriamo ora il moto dell'auto A1 e deduciamone l'equazione spazio-tempo del moto.
Supponendo la frenata uniforme, ricaviamo l'accelerazione (negativa) corrispondente :
.
Il moto di A1 è un moto rettilineo uniformemente accelerato per cui la sua equazione spaziotempo sarà
24
.
Nel nostro caso, essendo lo spazio iniziale di A1 pari a 20 m e la velocità iniziale 30 m/s , si avrà
:
da cui, semplificando :
.
Consideriamo ora il moto agli istanti t = 0, 1, 2, 3, 4, 5, 6 . Otteniamo perciò, facendo i calcoli, la
seguente tabella oraria :
si noti che dopo t = 5 l'auto A1 , avendo completamente frenato, rimane ferma, per cui la sia
posizione (95) rimane costante nel tempo.
Consideriamo ora il moto dell'auto A2 limitandoci per semplicità a considerare che esso è un
moto
rettilineo uniforme da t = 0 a t = 1 ( 1 secondo è il tempo di reazione di A2 ) mentre diventa
uniformemente accelerato in seguito allo stesso modo di A1 , perché si presuppone che le due auto
abbiano un identico sistema di frenata.
Otterremo allora la seguente tabella oraria :
(l'abbiamo ottenuta semplicemente aggiungendo a 30 (la posizione all'istante t = 1 ) la differenza
25
di spazio fra 47 - 20 della precedente tabella ecc.)
Riportiamo ora questi dati su un diagramma spazio-tempo e disegniamo i grafici del moto delle due
auto :
Dal grafico si vede bene che un po' prima dell'istante t = 4 l'auto A2 tamponerà l'auto A1 !!!
A questo punto sorge spontaneo ricordare il consiglio di rispettare sempre le distanze di sicurezza
!!!
In questo modo, aumentando tale distanza, il grafico di A1 si "alza" e l'urto non avviene.
Sui testi di preparazione all'esame di guida è riportata la formula empirica :
.
Essa si ricava da considerazioni molto semplici su grafici del genere.
26
Equazione della retta in fisica ed altro
01 - Utilizzo dell'equazione della retta in fisica.
L'equazione della retta è fondamentale anche per la fisica.
La descrizione di molti fenomeni fisici si riduce a scrivere l'equazione di una retta. Diamo
qui alcuni esempi ben noti perché già trattati più volte in questo corso. Ora, però, alla luce di
quanto appreso circa l'equazione della retta, questi argomenti possono essere compresi con
più profondità.
- 1 - equazione oraria del moto rettilineo uniforme.
Consideriamo un corpo su cui non agiscono forze esterne (la loro risultante è nulla).
Questo corpo, a causa del principio d'inerzia, si muoverà di moto rettilineo uniforme
ovvero con velocità costante. Come già sappiamo, per questo tipo di moto l'equazione
che lega lo spazio percorso al tempo è :
dove s è lo spazio, v la velocità costante con cui si muove il corpo, t è il
tempo e
è lo spazio iniziale, cioè lo spazio già percorso dal corpo al tempo 0
(rispetto ad un punto della traiettoria preso come origine dello spazio).
Questa equazione è detta equazione oraria del moto.
Se consideriamo t la variabile indipendente ed s la variabile dipendente, la
suddetta
equazione è l'equazione di una retta sul piano cartesiano 0ts . Infatti, se per esempio v
= 10 m/s
e
= 20 m , l'equazione oraria diventa :
s = 10 t + 20 .
Possiamo allora scrivere la seguente tabella :
da cui possiamo disegnare il grafico :
27
Il moto in questione è quindi rappresentato da una retta di coefficiente angolare 10 e
di
ordinata all'origine 20 . Esprimendo il coefficiente angolare la pendenza della retta, ed
essendo tale coefficiente pari alla velocità ( v = 10 ), si deduce che :
la velocità è uguale al coefficiente angolare della retta, ovvero alla sua
pendenza.
Questo fatto è di importanza capitale.
Supponiamo ora che il moto avvenga con velocità maggiore, mettiamo v = 20 (sempre
con la stesso spazio iniziale). L'equazione oraria del moto risulta allora :
s = 20 t + 20 .
da cui si può ricavare la tabella :
e di conseguenza il grafico (che affiancheremo al precedente con v = 10 ) :
28
In questo caso la velocità (il coefficiente angolare della retta) è v = 20 e quindi la
pendenza della retta è maggiore di quella con velocità v = 10 .
Supponiamo ora che il corpo sia fermo, cioè sia dotato di velocità v = 0 . L'equazione
oraria del moto sarà :
s = 20
che corrisponde ad una retta parallela all'asse delle x (che affianchiamo alle precedenti
):
Qui abbiamo velocità nulla, cioè coefficiente angolare nullo, ovvero pendenza nulla : al
passare del tempo la posizione del corpo resta la stessa.
Infine supponiamo che la velocità sia negativa, per esempio v = -20 . In questo caso,
al passare del tempo, l'ordinata, che indica la posizione del corpo, diminuisce.
L'equazione
oraria è allora :
s = -20 t + 20 .
Le relativa tabella é :
29
ed il grafico è (accanto ai precedenti) :
In questo caso abbiamo una velocità negativa, quindi una retta con un coefficiente
angolare
negativo ovvero una pendenza negativa.
- 2 - equazione tempo-velocità del moto rettilineo uniformemente accelerato.
L'equazione che lega il tempo t alla velocità v per un moto rettilineo uniformemente
accelerato, come già sappiamo, è :
dove v è la velocità, a l'accelerazione costante, t il tempo e
la velocità iniziale.
Se consideriamo il sistema di riferimento cartesiano 0tv questa funzione rappresenta
anch'essa una retta su cui possiamo fare tutte le considerazioni su ordinata all'origine e
coefficiente angolare fatte in precedenza :
30
02 - Esercizio.
Consideriamo un corpo in moto rettilineo uniformemente accelerato. Sia
= 90 km/h la sua
velocità
iniziale ed a = 3 m/s² la sua accelerazione. Si calcoli la velocità raggiunta al tempo t = 4 s e si
disegni il
grafico tempo-velocità del moto.
Si consideri un altro corpo, anch'esso in moto rettilineo uniformemente accelerato. La velocità
iniziale di
questo corpo sia
= 0 m/s e la sua accelerazione sia a = 6 m/s² . Si disegni il grafico tempovelocità
anche di questo corpo nello stesso sistema di assi cartesiani ortogonali e si determini l'istante in cui
esso
raggiunge la velocità del primo.
Soluzione.
Innanzi tutto trasformiamo la velocità iniziale del primo corpo da km/h a m/s . Per questo basta
dividere per 3,6 . Quindi :
.
L'equazione oraria tempo-velocità del primo corpo è (trattandosi di moto rettilineo uniformemente
accelerato) :
da cui sostituendo si ottiene la funzione :
che rappresenta una retta rispetto ad un sistema di assi cartesiani t-v .
La velocità del primo corpo all'istante t = 4 s è allora :
31
v = 3·4 + 25 = 37 m/s
ed il grafico orario tempo-velocità del primo corpo è :
L'equazione oraria tempo-velocità del secondo corpo è (trattandosi anche qui di moto rettilineo
uniformemente accelerato) :
che corrisponde alla retta passante per l'origine indicata nello stesso grafico :
(questa seconda retta è stata disegnata considerando che per t = 4 s si ha v = 24 m/s ).
Osservando il grafico si nota che la prima retta ha una pendenza minore della seconda (il
coefficiente
angolare della prima è 3 mentre quello della seconda è 6 ). Si nota anche che le due rette si
incontrano
in un punto corrispondente ad un tempo di circa 10 s :
32
Il punto d'incontro fra le rette corrisponde ad un istante in cui i due corpi hanno la stessa velocità.
Il problema potrebbe anche essere interpretato considerando che il primo corpo cessi di accelerare
all'istante t = 4 s . Da quell'istante in poi esso continua a muoversi con velocità costante pari a v =
37 m/s .
Il grafico risulta allora :
In questo caso il punto d'incontro fra i grafici orari (dove le velocità sono uguali) corrisponde ad un
tempo di circa 6,75 s .
Occorre infine precisare che i valori di t per i punti di incontro (in entrambi i casi) sono stati
ricavati
graficamente, quindi sono passibili di errore.
33
Grandezze scalari e vettoriali
01 - Esempio di moto vario.
Consideriamo il moto rettilineo di un corpo il cui grafico spazio-tempo è il seguente :
Dividiamo il moto in 4 zone :
-I-
- II uguali
In questa zona il moto è accelerato con accelerazione positiva. Infatti, punto per punto,
la velocità, che è indicata dalla pendenza della curva, cresce. La forza risultante che
agisce sul corpo è di conseguenza positiva (orientata secondo il moto).
In questa zona il moto è uniforme. La velocità rimane costante in quanto a tempi
corrispondono spazi uguali, cioè il grafico è un segmento di retta. L'accelerazione è
qui
nulla. La forza risultante che agisce sul corpo è di conseguenza nulla.
- III - In questa zona il moto è accelerato con accelerazione negativa. La velocità, data dalla
pendenza della curva, cala punto per punto. La forza risultante che agisce sul corpo è
di
conseguenza negativa (orientata contrariamente al moto).
- IV - In questa zona il corpo è in quiete perché lo spazio rimane costante allo scorrere del
tempo.
La velocità è qui nulla e l'accelerazione è anch'essa nulla. La forza risultante che
agisce
sul corpo è di conseguenza nulla.
02 - Grandezze scalari e grandezze vettoriali.
Le grandezze fisiche, gli oggetti di cui si occupa la fisica, sono grandezze misurabili. Altri enti
che non
sono misurabili non sono oggetto della fisica. Come ben sappiamo, dobbiamo a Galileo
l'avere chiarito lo
34
scopo ed il metodo della fisica, così che la scienza moderna ha inizio con lui.
Le grandezze fisiche sono allora entità misurabili. Spostamenti, tempi, velocità, accelerazioni,
forze, masse ecc.
sono esempi di grandezze fisiche che abbiamo già incontrato più volte. Queste grandezze devono
sempre
essere riferite ad una unità di misura. Non è corretto, univoco, per esempio, dire : questa massa
vale 10 .
Se non si specifica l'unità di misura, quella affermazione non ha senso. L'affermazione corretta è
invece :
questa massa vale 10 chilogrammi.
Le unità di misura attualmente accettate dai fisici sono elencate nel cosiddetto sistema
internazionale (S.I.).
In passato si usavano vari sistemi di misura, praticamente ogni nazione aveva i propri. Oggi si è
deciso a
livello mondiale di utilizzare il S.I. anche se molte unità di misura "tradizionali" vengono ancora
utilizzate.
Per esempio i piedi, i galloni, le calorie, i cavalli-vapore ecc.
In fisica esistono due tipi di grandezze : le grandezze scalari e le grandezze vettoriali.
Ciò si deduce osservando direttamente la realtà. Vediamo ora di chiarire il perché di questa
distinzione.
- grandezze scalari.
Le grandezze scalari sono quelle grandezze che sono completamente caratterizzate, definite, da
un
solo numero rispetto ad una unità di misura prescelta.
Per esempio, l'area è uno scalare (si può dire così, più brevemente). Il numero in metri quadrati che
rappresenta l'area di una superficie è sufficiente a caratterizzare quella grandezza. Non servono
ulteriori
specificazioni per cui se andassi a comprare delle mattonelle per il pavimento del mio studio, dopo
avere
scelto il tipo, basterebbe che dicessi al commerciante un solo numero (in metri quadrati) che lui
capirebbe
immediatamente di cosa ho bisogno.
Altre grandezze fisiche, invece, per essere specificate, hanno bisogno di più informazioni.
- grandezze vettoriali.
Se dicessi che mi sono spostato di un chilometro, ciò non sarebbe sufficiente per indicare dove
esattamente
sono andato. In questo caso dovrei aggiungere anche l'informazione della direzione su cui mi sono
mosso
e del verso che ho seguito.
35
Le grandezze vettoriali, allora, sono definite da una direzione, un verso ed una intensità.
La direzione è la retta su cui la grandezza si esplica, il verso è uno dei due possibili versi che una
retta
può avere, e l'intensità (si dice anche modulo o valore assoluto) è il valore numerico, rispetto ad
una
unità di misura, che esprime il valore di quella grandezza.
Esempi di grandezze vettoriali sono lo spostamento, la forza, la velocità ecc. Tutte queste
grandezze
non possono essere semplici grandezze scalari perché necessitano, per essere completamente
determinate,
anche di una specificazione di direzione e verso.
Le grandezze vettoriali (più brevemente, i vettori) posso essere rappresentati geometricamente
come
segmenti dotati di freccia :
Si noti che la lunghezza del segmento che indica il vettore è rapportato ad una unità di misura, per
cui,
nell'esempio grafico, il vettore ha intensità 5 .
Simbolicamente un vettore si indica con una lettera su cui si pone una piccola freccia, oppure da
una
lettera in grassetto :
oppure V .
I vettori possono essere sommati. Per esempio, se consideriamo due spostamenti successivi di un
corpo, lo spostamento complessivo risultante sarà la somma dei due vettori che rappresentano
i due spostamenti :
36
Il corpo si muove inizialmente da A a B e poi da B a C . Lo spostamento AB è rappresentato
dal vettore
e lo spostamento BC è rappresentato dal vettore
.
Lo spostamento complessivo risultante, da A a C , è rappresentato dal vettore
esprimibile
come la somma vettoriale
che è
.
Si noti che la somma vettoriale così definita non coincide in generale con la normale somma di
numeri !!!
Infatti, lo spostamento
ha una intensità 4 mentre lo spostamento
Lo
spostamento risultante, somma vettoriale dei due, ha intensità pari a :
ha una intensità di 3 .
(si applica il teorema di Pitagora) mentre la somma delle intensità dei due vettori è :
4+3=7.
Solo nel caso di vettori allineati e dello stesso verso si ha che l'intensità del vettore risultante
eguaglia la
somma delle intensità dei vettori di partenza :
37
in questo caso l'intensità di
è 7 ed eguaglia la somma 4 + 3 delle intensità di
e
.
Addirittura, se il corpo, dopo essere arrivato in B ritorna in A , si ha :
dove lo spostamento risultante è nullo. Il corpo, in effetti, dal punto di vista dell'effettivo
spostamento,
ritornando al punto di partenza, non si è mosso. Si ha cioè che
vale zero.
Nel caso generale di due spostamenti con angoli qualunque, si ha :
dove si vede molto bene che il vettore risultante
è la diagonale principale del
parallelogramma
così come ottenuto in figura. La stessa cosa, ovviamente, vale anche per i casi precedenti
Abbiamo così desunto una regola di fondamentale importanza :
i vettori si sommano secondo la regola del parallelogramma.
Esempi :
- 1 - Somma di forze :
38
Nel caso I le due forze di 2 N sono ad angolo retto per cui la risultante (somma) avrà
una
intensità pari a
N (per il teorema di Pitagora).
Nel caso II le de forze hanno la stessa direzione, stessa intensità ( 2 N ) ma verso
opposto
per cui la risultante avrà intensità 0 .
Nel caso III le due forze sono uguali in direzione verso ed intensità. La risultante avrà
intensità 4 N , stessa direzione e stesso verso.
Si noti che le forze le abbiamo considerate applicate in uno stesso punto.
- 2 - Somma di velocità (le intensità dei vettori sono su scala arbitraria) :
Nel primo caso un treno viaggia a 30 km/h rispetto a terra ed un uomo cammina nella
direzione
del moto del treno alla velocità di 5 km/h . La somma delle velocità avrà, vista da
terra, una
intensità di 35 km/h , la stessa direzione e lo stesso verso.
Nel secondo caso, invece, la risultante avrà intensità 25 km/h , stessa direzione e verso
della
velocità maggiore.
Un ultimo esempio. Una barca che attraversa un fiume :
39
40
Moto circolare uniforme
01 - Moto circolare uniforme.
Il moto di un corpo che avviene su una traiettoria circolare (una circonferenza) con velocità (in
modulo,
intensità) costante si dice moto circolare uniforme.
Si noti che ad essere costante, in questo moto, è l'intensità della velocità, cioè il numero che ne
rappresenta il valore. Questa precisazione è doverosa, perché in questo moto la direzione della
velocità cambia continuamente.
La velocità, come ben sappiamo, è un vettore per cui è caratterizzata da intensità, direzione e
verso.
Per il fatto che la velocità cambia di direzione, anche se non cambia in intensità, il moto circolare
uniforme è un moto accelerato. Questo fatto è di grande importanza ed è necessario
sottolinearlo,
perché, siccome il modulo della velocità è costante, si potrebbe essere tentati di considerarlo un
moto non accelerato.
Per definizione, un moto accelerato è un moto in cui la velocità cambia e, perché la velocità
cambi,
basta che di essa cambi anche una sola delle sue "componenti" (intensità, direzione o verso).
Dal punto di vista dinamico, poi, se un moto è accelerato allora è presente una forza (per il
secondo
principio), ma di questo parleremo fra poco.
Possiamo allora chiamare l'intensità della velocità col nome di velocità scalare, per distinguerla
dalla
velocità nel suo complesso, intesa come vettore.
Possiamo perciò ridefinire il moto circolare uniforme come quel moto su di una circonferenza che
avviene con velocità scalare costante.
Se percorro in auto una rotonda a velocità scalare (quella misurata dal tachimetro) costante, sono in
moto circolare uniforme.
41
Definiamo (o ridefiniamo più esattamente) ora alcune grandezze relative al moto circolare
uniforme :
- 1 - periodo
Il periodo è il tempo impiegato a fare un giro completo. Esso si misura nel S.I.
(Sistema
Internazionale) in secondi. Esso viene di solito indicato dalla lettera maiuscola T .
Per esempio, se percorro in auto una rotonda in 20 s , il periodo del moto circolare
uniforme che compio è proprio uguale a 20 s , per cui T = 20 s.
Si noti che il concetto di periodo vale anche per moti qualunque che abbiano però
la caratteristica di essere periodici, ovvero di "ripassare" per uno stesso punto dopo
un certo tempo.
- 2 - frequenza
La frequenza indica il numero di giri completi effettuati nell'unità di tempo. Nel S.I.
la frequenza si misura in hertz (Hz) ed indica il numero di giri al secondo. Essa viene
di solito indicata con la lettera minuscola f o la lettera greca ν ("ni").
La frequenza caratterizza in generale un fenomeno periodico qualunque.
Fra il periodo e la frequenza sussiste una relazione matematica importantissima :
f=1/T
che esprime il fatto che la frequenza è l'inverso del periodo.
Per esempio, se il periodo di un moto circolare uniforme è 5 s ciò significa che il corpo
fa un giro completo in 5 secondi. Quanti giri farà al secondo ? Ovviamente 1/5 , per
cui la frequenza di questo moto sarà 1/5 = 0,2 Hz .
- 3 - velocità scalare
La velocità scalare del moto circolare uniforme è, come per tutte le velocità, misurata
dal
rapporto spazio / tempo .
Se il raggio della circonferenza è R , considerando che l'intera circonferenza misura 2
πR
e che il tempo complessivo per percorrerla è il periodo T , si avrà allora :
v=s/t=2πR/T
Questa è la formula della velocità scalare del moto rettilineo uniforme. Essa può essere
espressa anche in funzione della frequenza tenendo presente che f = 1 / T . Si ottiene
allora :
v=2πRf .
42
La velocità scalare, ovviamente, è misurata nel S.I. in m/s .
Se per esempio percorro in auto una rotonda di raggio R = 20 m in un periodo T = 20 s
,
la mia velocità scalare sarà :
v = 2 · 3,14 · 20 / 20 = 6,28 m/s .
02 - Accelerazione centripeta.
Il moto rettilineo uniforme è un moto dotato di accelerazione perché la direzione della sua velocità
cambia punto per punto. Vediamo ora come si calcola questa accelerazione e le sue caratteristiche.
Consideriamo i vettori velocità nei punti A e B e chiamiamoli rispettivamente
e
:
Per accelerazione si intende la variazione della velocità nell'unità di tempo. Chiamiamo con
("delta v") la variazione di velocità fra i punti A e B per cui si ha :
in quanto la velocità nel punto B vale la velocità nel punto A più la variazione di velocità (sono
tutti e
tre vettori !).
Per comodità, riportiamo il vettore
Otteniamo così :
nel punto A tramite uno spostamento parallelo.
43
Si ricordi che le intensità di
e
sono le stesse e che per fare la somma fra due vettori si deve
usare la regola del parallelogramma .
Abbiamo così ottenuto il vettore variazione di velocità
che appare "sorprendentemente" diretto
verso il centro della circonferenza lungo la quale avviene il moto.
Se poi dividiamo questo vettore per il tempo t in cui il punto va da A a B , otteniamo infine
l'accelerazione
cercata che è essa stessa un vettore che ha la stessa direzione e verso (poiché il tempo per cui
dividiamo
è un numero positivo) del vettore variazione di velocità
.
L'accelerazione risulta allora :
.
Si noti che abbiamo indicato l'accelerazione con il "pedice" c . Questo a significare che
l'accelerazione
"punta" verso il centro, e per questo è detta accelerazione centripeta.
Questa accelerazione, in un dato punto della circonferenza, è esattamente puntata verso il centro
anche
se, guardando il grafico, ciò sembrerebbe vero solo approssimativamente. Nel grafico abbiamo
preso due
punti ( A e B ) "abbastanza" lontani per motivi di semplicità. Se li prendessimo "molto vicini"
(infinitamente
vicini), si vedrebbe che
è diretto esattamente verso il centro e si otterrebbe allora la
variazione
istantanea della velocità.
Ritorneremo su questi concetti quando
affronteremo il calcolo differenziale. Per il momento accontentiamoci
di queste considerazioni qualitative.
Quanto vale l'intensità dell'accelerazione centripeta ? Per ricavarla occorrono alcuni rudimenti di
calcolo
differenziale, per cui ne diamo direttamente del risultato. L'intensità della accelerazione centripeta è
44
dove v è la velocità scalare del moto ed R il raggio della circonferenza. Si noti anche che qui,
velocità
ed accelerazione sono intese scalarmente (come intensità, numeri).
Si noti che l'accelerazione centripeta è direttamente proporzionale al quadrato della velocità
ed
inversamente proporzionale al raggio. Ciò significa che se la velocità raddoppia, l'accelerazione
quadruplica ecc. , se il raggio raddoppia, l'accelerazione dimezza, se il raggio dimezza,
l'accelerazione
raddoppia ecc.
Questo fatto è molto importante e lo approfondiremo prendendo in considerazione la forza
centripeta.
Cinematica rotazionale
01 - Cinematica rotazionale.
La cinematica studia il moto dei corpi senza prendere in considerazione le forze che agiscono sui
corpi stessi.
La dinamica, invece, studia il moto dei corpi in relazione alle forze che agiscono su di essi.
Fino ad oggi abbiamo considerato quasi sempre corpi in moto traslatorio.
Un corpo compie un moto traslatorio se tutti i suoi punti traslano, si spostano, di uno stesso
segmento in un dato tempo. Per esempio (in sezione) :
Consideriamo ora un corpo rigido (un corpo composto da particelle strettamente legate fra loro)
e
supponiamo che esso sia vincolato a ruotare attorno ad un asse fisso. Un tale corpo si dice dotato
di moto rotatorio
In generale, un moto qualunque è una combinazione di moto traslatorio e rotatorio e si chiama
moto
roto-traslatorio.
In un moto rotatorio, le particelle poste sull'asse di rotazione stanno ferme (rispetto ad esso) mentre
le altre compiono delle circonferenza (in una rotazione completa) :
45
Per determinare la posizione di un punto di un corpo soggetto a moto rotatorio conviene usare un
sistema di riferimento diverso dall'usuale sistema di riferimento cartesiano ortogonale. Nei moti
rotatori
si utilizza di preferenza un sistema di riferimento polare.
Rispetto ad un tale sistema di riferimento, la posizione di un punto viene determinata dalla
distanza
del punto dall'asse di rotazione e da un conveniente angolo. In questo modo la posizione di un
punto è completamente determinata.
Di solito, l'angolo viene preso in senso antiorario a partire dal semiasse positivo delle ascisse. Si
ha
cioè :
Le coordinate polari del punto P sono allora
come ben noto,
mentre le sue coordinate cartesiane sono,
.
02 - Radianti.
Come si misurano gli angoli ? In vari modi fra i quali uno è quello preferito dai matematici e dai
fisici :
la misura in radianti.
Consideriamo l'angolo
circonferenza
del precedente grafico e chiamiamo s la lunghezza dell'arco di
46
ad esso sotteso :
Ebbene, la misura in radianti dell'angolo
la
misura del raggio R . Per cui :
consiste nel rapporto fra la lunghezza dell'arco s e
.
Evidentemente, un angolo di 1 radiante (si scrive anche 1 rad ) è quell'angolo che sottende un
arco
lungo quanto il raggio :
Quanto vale (in radianti) l'angolo giro ? Siccome l'arco sotteso ad un angolo giro è l'intera
circonferenza, che misura
, la misura dell'angolo giro è quindi :
.
E' fondamentale notare che la misura in radianti di un angolo è indipendente dall'arco che lo
sottende che noi scegliamo. Ciò è evidente guardando il seguente grafico dove abbiamo preso
due raggi di cui uno doppio dell'altro :
47
se raddoppia il raggio, di conseguenza raddoppia l'arco, per cui il rapporto, che è appunto la misura
dell'angolo in radianti, non cambia !!! Cioè :
.
Notiamo anche che il radiante, poiché è il rapporto fra due lunghezze, è una grandezza priva di
dimensioni
fisiche. E' perciò un numero puro.
03 - Velocità angolare.
Consideriamo ora la velocità in un moto rotatorio. E' chiaro che i punti dell'asse di rotazione hanno
velocità nulla mentre, di mano in mano che ci si allontana da esso, i punti hanno velocità lineari
maggiori :
Le velocità lineari dei punti di un corpo in rotazione sono, quindi, diverse punto per punto.
Possiamo però affermare che in un moto rotatorio, in un dato tempo, tutti i punti compiono uno
stesso angolo. Possiamo quindi definire un "nuovo tipo" di velocità basata non più su le distanze
lineari percorse nel tempo, ma sugli angoli descritti nel tempo.
Definiamo quindi la velocità angolare, in analogia con la definizione di velocità lineare
,
come il rapporto fra l'angolo compiuto ed il tempo impiegato a compierlo. Abbiamo cioè, se
il moto rotatorio è uniforme :
48
.
Possiamo di conseguenza definire anche l'accelerazione angolare come il rapporto fra la
variazione
di velocità angolare ed il tempo in cui la variazione avviene, allo stesso modo in cui abbiamo
definito
l'accelerazione lineare come
rotatorio
uniformemente accelerato :
. L'accelerazione angolare è quindi, nel caso di moto
.
49
Gravitazione universale ed altro
01 - Gravitazione universale.
Newton scoprì la legge della gravitazione universale attorno alla metà del '600. Si dice che egli
fosse rifugiato in campagna durante una epidemia di peste e che un giorno, dalla caduta di una
mela,
egli intuisse l'universalità della forza di gravità.
La rivoluzione copernicana stava producendo una profonda trasformazione in tutti i campi del
sapere umano. Ad un tratto non era più la terra al centro dell'universo, ma tutto orbitava attorno
al sole. Certe affermazioni della Bibbia erano da questa teoria messe in discussione e soprattutto
la "posizione" dell'uomo, come centro del creato, era ridimensionata.
L'ipotesi copernicana, infine, "costringeva" gli scienziati a chiedersi perché i corpi ruotassero
attorno
al sole, in quanto la filosofia di Aristotele non era più sufficiente a soddisfare questi interrogativi.
Si
cominciava a ricercare il "perché scientifico" della cose, si iniziava a produrre teorie scientifiche
che,
tramite il linguaggio della matematica, fossero in grado di essere verificate dalle osservazioni e
dagli
esperimenti secondo il nuovo modo di "pensare la natura" introdotto da Galileo.
Newton pubblicò (nel 1686) le sue scoperte sulla gravità, assieme ai principi della meccanica, in un
testo fondamentale per il pensiero scientifico, solo dopo una ventina d'anni da quelle intuizioni.
Non
si sa se la storia della mela sia vera o no, ma sicuramente è verosimile.
Se la mela cade, per il principio d'inerzia (già scoperto da Galileo), una forza deve agire su di essa,
se
no essa dovrebbe permanere nel suo stato di quiete. Anche la luna, per ruotare attorno alla terra,
deve
risentire dell'azione di una forza (centripeta) che le fa compiere un moto circolare (non rettilineo
uniforme).
Newton intuì che la forza che fa cadere la mela è la stessa che fa ruotare la luna attorno alla
terra !
Newton scoprì che la forza gravitazionale è una forza universale, che agisce qui sulla terra e fuori
da
essa, in ogni luogo dell'universo. La fisica di Aristotele distingueva invece fra la terra ed il cielo e
proponeva
due "modelli" diversi. I "corpi terrestri", "corruttibili", cadendo, tendevano a ricongiungersi alla
terra che li
aveva generati. I "corpi celesti", invece, essendo "incorruttibili", ruotavano su orbite "perfette"
(circolari)
attorno alla terra.
Newton, invece, tramite il metodo scientifico, con esperimenti ed osservazioni, trova una formula
matematica in grado di spiegare i fenomeni "terrestri" così come quelli "celesti".
50
La formula della gravitazione universale di Newton afferma essenzialmente che la forza
gravitazionale fra
due corpi è direttamente proporzionale alle masse dei due corpi ed inversamente proporzionale
al
quadrato della distanza fra essi.
Anche Hooke aveva intuito la natura della gravitazione (prima di Newton !) ma non era giunto ad
una
sua formulazione matematica esatta. Newton, pur essendo a conoscenza delle scoperte di Hooke,
non
ne fece mai menzione nei suoi scritti e per questo i rapporti fra i due scienziati deteriorarono presto
(Newton era noto anche per il suo ... caratteraccio).
La teoria della gravitazione universale di Newton rappresenta il primo grande esempio di
unificazione
delle leggi fisiche della storia :
tutti i fenomeni gravitazionali presenti nell'universo vengono spiegati con una semplice
formula !!!
La caduta dei gravi qui sulla terra, il moto della luna e dei pianeti attorno al sole, il moto delle
stelle, tutti
questi fenomeni sono descritti con grande precisione da una semplice formula !
I viaggi spaziali, poi, qualcuno ha detto, sono una "applicazione" tecnologica della formula di
Newton !
02 - Formulazione matematica della forza di gravità.
Consideriamo due corpi materiali, che per semplicità considereremo sferici ed omogenei, di
massa
e
, posti ad una distanza d fra i loro centri (che coincidono, data la simmetria sferica, con i
loro centri di massa o baricentri, punti in cui si può considerare concentrata tutta la massa dei
corpi) :
La formula matematica che descrivere la forza di gravità che si instaura fra due corpi è :
51
dove F è la forza di gravità e G è la cosiddetta costante di gravitazione universale.
Come abbiamo già affermato, questa forza è direttamente proporzionale alle masse dei corpi ed
inversamente proporzionale al quadrato della distanza fra essi.
Il fatto che la forza di gravità è proporzionale alle masse, significa che, per esempio, raddoppiando
una
di esse, la forza raddoppia.
Il fatto che la forza di gravità è inversamente proporzionale a quadrato della distanza, significa che
se,
per esempio, la distanza raddoppia, la forza diventa un quarto.
03 - Costante di gravitazione universale.
La costante di gravitazione universale G vale, nel sistema di misura internazionale (S.I.) circa,
e si misura in
(ovvero newton per metro quadro fratto chilogrammo quadro).
Il motivo di questa "strana" unità di misura è molto semplice. Esprimendo la formula di Newton
nelle
unità di misura corrispondenti alle grandezze in gioco, si ottiene :
.
Sostituendo poi l'unità di misura di G definita sopra si ha :
da cui, semplificando, si ottiene l'identità N = N (newton = newton) come deve essere.
La costante G è una costante molto piccola che vale in tutto l'universo ed il cui valore può essere
ricavato
in molti modi (osservando il moto dei corpi celesti, per esempio, ma anche con misure fatte sulla
terra).
Una delle misure terrestri "classiche" di essa è stata eseguita da Cavendish (1798) usando un
pendolo a
torsione.
Si tratta di un filo appeso che viene fatto ruotare dall'azione della forza di gravità fra masse
applicate
52
alla sua estremità e masse fisse. Il filo, ruotando, si oppone con una forza di reazione alla debole
forza
gravitazionale fra le masse. Questa forza può essere misurata facilmente conoscendo le proprietà
di
torsione del filo.
Usando poi la formula della forza gravitazionale, si ricava direttamente G .
04 - Esempio di applicazione della legge di gravitazione universale.
Consideriamo un corpo di 70 kg e chiediamoci con quale forza gravitazionale (il suo peso) esso è
attratto dalla terra.
Sia m la massa del corpo (pari a 70 kg ) e sia M la massa della terra (pari a circa
Sia R il raggio terrestre (circa
kg ).
m ). Applicando la formula di Newton si ha allora :
(mettiamo alla fine le unità di misura).
Eseguiamo ora i calcoli applicando le proprietà delle potenze (ed usando la notazione scientifica,
che
consiste nell'utilizzare le potenze di 10 e di esprimere ogni numero in unità seguite dalla parte
decimale ) :
.
Abbiamo così calcolato la forza (in newton) con cui questo corpo di 70 kg è attratto dalla terra
utilizzando
la legge della gravitazione universale, la stessa che agisce fra stelle, pianeti, ovunque.
Come possiamo verificare l'esattezza di questo risultato ? Noi sappiamo che ogni corpo, qui sulla
53
superficie
terrestre, cade con la stessa accelerazione che è indipendente dalla massa del corpo (consideriamo
l'attrito
con l'aria trascurabile). Questa accelerazione, detta accelerazione di gravita, è denominata con g
e vale
circa 9,81 m/s² (la si può misurare direttamente con tutta la precisione che si vuole)
Per la seconda legge della dinamica si ha :
F=m·g
per cui otteniamo :
.
Questo risultato è "coerente" con quello trovato in precedenza (la differenza dipende dalle
approssimazioni
effettuate).
05 - Altri esempi di applicazione della legge di gravitazione universale.
La legge di gravitazione universale è, come sappiamo, espressa dalla formula matematica :
dove F rappresenta la forza gravitazionale con cui si attirano due corpi, G è la costante di
gravitazione
universale,
corpi.
ed
sono le masse dei due corpi e d è la distanza fra i centri di massa dei due
Consideriamo ora due esempi di applicazione della legge di gravitazione universale.
06 - Calcolo della massa del sole.
Consideriamo il moto della terra attorno al sole. Esso avviene su di una traiettoria che può
essere
considerata circolare (in effetti l'orbita è ellittica, ma la distanza fra i due fuochi dell'ellisse è
54
relativamente piccola, per cui l'orbita può considerarsi pressoché circolare).
La terra è attirata dal sole dalla forza gravitazionale
che la "costringe" a percorrere un'orbita
circolare (quasi). Se sulla terra non agisse nessuna forza essa, per il primo principio della dinamica,
si muoverebbe di moto rettilineo uniforme (e non circolare !).
La forza gravitazionale che fa percorrere alla terra una traiettoria circolare è uguale alla forza
centripeta
che, come sappiamo, è presente quando un corpo compie una traiettoria circolare.
Scriviamo allora :
.
Il perché queste due forze sono uguali dipende dal fatto che sulla terra agisce la sola forza
gravitazionale
prodotta dal sole (le altre, prodotte da altri corpi celesti, sono trascurabili) per cui, in questo caso,
possiamo
affermare che :
la forza centripeta coincide con la forza gravitazionale.
La formula della forza centripeta, come già sappiamo, è :
dove m è la massa della terra, v è la velocità periferica della terra attorno al sole ed R è la
distanza
terra-sole.
Uguagliando la formula della forza gravitazionale con quella della forza centripeta otteniamo :
55
dove con M abbiamo indicato la massa del sole e con m quella della terra ( R è la distanza terrasole).
Da questa equazione possiamo ricavare l'incognita M (la massa del sole) con alcuni semplici
passaggi.
Se dividiamo entrambi i membri dell'equazione per la massa della terra m , che vi è presente in
entrambe,
otteniamo :
.
Dividere entrambi i membri di una uguaglianza per uno stesso numero (purché diverso da 0 ) non
cambia
l'uguaglianza stessa. Per esempio, l'uguaglianza :
rimane un'uguaglianza se dividiamo ambo i membri per 2 :
perché si ottiene :
6=6.
Tornando alla formula da cui ricaveremo la massa del sole, semplificando le m , si ottiene :
.
Se moltiplichiamo ambo i membri (facendo questo l'equazione non cambia, analogamente a
quando
si divide ambo i membri per uno stesso numero) dell'equazione per R (che è presente in entrambi i
denominatori) otteniamo :
da cui, semplificando le R :
Ora moltiplichiamo ambo i membri ancora per R e dividiamo per G . Otteniamo così :
56
,
da cui, semplifichiamo, perveniamo al risultato :
che fornisce finalmente la massa del sole cercata.
Tenendo presente che la costante di gravitazione universale vale (circa) :
,
la velocità periferica di rotazione della terra attorno al sole è (circa) :
e che la distanza terra-sole è (circa) :
,
sostituendo questi valori nella formula che dà la massa del sole e calcolando, otteniamo infine :
(il simbolo
significa "circa uguale").
La "potenza" della formula di Newton della gravitazione universale è incredibile !!! Con semplici
calcoli
siamo in grado di determinare con buona precisione la massa della nostra cara stella !!!
07 - Calcolo della velocità di un satellite in orbita.
Consideriamo un satellite artificiale in orbita circolare attorno alla terra. Perché esso non cada o
si
disperda nello spazio (così come nel caso dei pianeti attorno al sole) occorre che la forza
centripeta
che lo fa ruotare su un'orbita circolare sia uguale alla forza di gravità con cui la terra lo attira a sé.
57
Supponiamo che il raggio della terra sia R e la distanza del satellite dalla superficie terrestre sia h
(si noti che che h normalmente è piccola rispetto ad R ). Uguagliando la forza di gravità con la
forza
centripeta, come nell'esempio precedente, possiamo scrivere :
(dove M è la massa della terra, m la massa del satellite).
Dividendo ambi i membri dell'equazione per m e moltiplicando per (R + h) , semplificando si
ottiene :
ovvero :
.
Per ricavare il valore della velocità v basta fare la radice quadrata del secondo membro, cioè :
.
Lasciamo al lettore volenteroso il compito di calcolare numericamente questa velocità per valori
diversi
a piacere di h (i valori di R ed M sono riportati nel resoconto dell'incontro precedente).
Se non fosse chiaro il perché abbiamo posto v = radice quadrata ... , potremmo notare che se una
certa quantità A al quadrato vale 16 , la quantità A sarà uguale a 4 , ovvero alla radice quadrata
di 16 . Cioè se :
58
allora :
.
In verità, anche il valore negativo -4 , se elevato al quadrato, dà 16 , ma qui noi consideriamo
solo
grandezze positive.
08 - Ripasso sulle leggi di Newton.
Newton riuscì a sintetizzare la descrizione dei fenomeni della meccanica e della gravitazione nelle
tre leggi della dinamica e nella legge della gravitazione universale. Si tratta del primo, e
forse più grande, processo di unificazione del sapere scientifico. In poche leggi, espresse in
forma matematica, vengono descritti una infinità di fenomeni naturali.
Non ci stancheremo mai di sottolineare la grandezza, la potenza e la bellezza della mirabile sintesi
che Newton operò nel tentativo di comprendere le leggi di natura !!!
Ricordiamoli :
- 1 - 1' principio della dinamica o principio d'inerzia (già scoperto da Galileo) : un corpo
non soggetto a forze, si muove con velocità costante (in intensità, direzione e verso)
(rispetto ad un sistema di riferimento inerziale).
- 2 - 2' principio della dinamica : una forza che agisce su un corpo gli imprime una
accelerazione (variazione di velocità) proporzionale alla forza stessa (il coefficiente
di proporzionalità si chiama massa). Il principio si esprime matematicamente con la
nota formula F = m · a .
- 3 - 3' principio della dinamica : ad ogni forza corrisponde una forza contraria (uguale in
intensità ed in direzione, ma contraria in verso).
- 4 - Legge di gravitazione universale : due corpi si attirano con un forza gravitazionale
che è direttamente proporzionale alle masse dei corpi ed inversamente proporzionale
al quadrato della loro distanza (calcolata rispetto ai loro centri di massa).
09 - Sul concetto di massa. Massa inerziale. Massa gravitazionale.
Il concetto di massa è uno dei concetti della fisica più "complicati" da definire.
Una prima definizione intuitiva che di solito si dà, afferma che essa è la quantità di materia che
un
corpo possiede. Questa definizione è però solo qualitativa (cosa significa infatti quantità di materia
?)
ed ha il solo pregio di introdurre facilmente nell'argomento.
La massa, come ogni grandezza fisica, deve essere misurabile. Ecco allora che la definizione di
quantità di materia non può essere adeguata essendo troppo vaga.
Per definire la massa allora occorrono le leggi, espresse in formule matematiche, che la invocano.
59
Esistono quindi due tipi di massa :
la massa inerziale, quella che compare nella formula del 2' principio della dinamica :
e la massa gravitazionale, quella che compare nella formula della legge di gravitazione :
.
Si tratta di due tipi di massa diversi, perché definiti in fenomeni di tipo diverso e quindi da formule
matematiche diverse.
Quanto qui affermato può stupire alquanto : fino ad ora abbiamo parlato di un solo tipo di massa !
Ma vediamo allora di dare una definizione più precisa dei due tipi di massa.
La massa inerziale indica la "resistenza" che un corpo oppone alla variazione del suo stato
di moto.
Infatti, se applichiamo una stessa forza a due corpi diversi, otteniamo differenti accelerazioni.
Se per esempio applichiamo una forza di 100 N (newton) ad un corpo di massa inerziale 10.000 kg
otteniamo una accelerazione pari a :
.
Se invece applichiamo la stessa forza ad un corpo di massa inerziale 5 kg , otteniamo
l'accelerazione
.
Un corpo di massa inerziale maggiore oppone una maggiore "resistenza" alla variazione del suo
stato di
moto per cui, a parità di forza, si ottiene una accelerazione minore. Un corpo di massa inerziale
minore
oppone una minore "resistenza" alla variazione del suo stato di moto per cui, a parità di forza,
si ottiene
una accelerazione maggiore.
A causa della formula F = m · a che esprime il 2' principio della dinamica, possiamo quindi
definire
la massa inerziale come il rapporto :
.
60
Per calcolare la massa inerziale di un corpo basta allora dividere la forza che agisce su di esso per
la
accelerazione che esso subisce. A parità di forza, maggiore accelerazione significa massa inerziale
minore, minore accelerazione significa massa inerziale maggiore (più precisamente, accelerazione
e
massa inerziale sono inversamente proporzionali).
La massa gravitazionale indica la "capacità" che hanno i corpi di attirarsi gravitazionalmente.
La forza gravitazionale che si instaura fra due corpi è, ripetiamo, direttamente proporzionale alle
masse
dei corpi ed inversamente proporzionale al quadrato della loro distanza (calcolata rispetto ai loro
centri
di massa).
Qual è il legame fra i due tipi di massa ?
L'esperienza mostra però che massa inerziale e massa gravitazionale sono legate fra loro (per
questo motivo si giustifica l'uso dello stesso temine "massa").
In effetti, grazie ad esperimenti sofisticati, si verifica che massa inerziale e massa gravitazionale
coincidono (con grande precisione), e questo fatto non è ovvio tanto da rappresentare una nuova
legge di natura che Einstein chiamò principio di equivalenza. L'equivalenza fra i due tipi di
massa
costituisce la base logica su cui si fonda la teoria della relatività generale.
Energia cinetica
01 - Energia cinetica.
Come abbiamo già visto al punto 5 dell' Esercitazione 2 , il lavoro compiuto da una forza costante
(in assenza di attriti) che agisce su di un corpo di massa m (nella stessa direzione e verso del
moto)
inizialmente fermo per portarlo alla velocità v è pari a :
.
Analogamente si può dimostrare che un corpo, dotato di massa m e velocità v , può compiere,
arrestandosi contro una molla o altri ostacoli, un lavoro pari a
. La quantità
viene
chiamata energia cinetica del corpo e corrisponde al lavoro che quel corpo può effettuare,
prima di fermarsi, in virtù della sua velocità. Il termine energia assume così, in questo caso,
il significato di capacità di compiere un lavoro ed il termine energia cinetica significa in
sostanza
energia di movimento. Il simbolo che usiamo per indicare l'energia cinetica è la lettera T .
Quindi :
61
Osservando la formula che definisce l'energia cinetica possiamo subito affermare che essa è
direttamente
proporzionale alla massa ed al quadrato della velocità. Questo significa che se la massa raddoppia,
l'energia cinetica raddoppia, ma se la velocità raddoppia, l'energia cinetica quadruplica.
Questo fatto è di grande importanza e dovrebbe essere ben tenuto presente da chi guida !!!
02 - Esercizio.
Un tuffatore di massa m = 70 kg si tuffa da un trampolino alto s = 10 m (senza ruotare su se
stesso
e trascurando gli attriti con l'aria). Ricordando che l'accelerazione di gravità è g = 9,8 m/s² (circa),
calcolare il lavoro fatto dalla forza peso durante il tuffo (fino a che il tuffatore tocca l'acqua) e la
velocità con cui egli tocca l'acqua.
Soluzione.
Il lavoro fatto dalla forza peso del tuffatore è :
dove p è il peso del tuffatore ed h l'altezza da cui esso si tuffa.
Il peso(che è una forza) è dato dalla 2' legge della dinamica dalla formula :
dove m è la massa del tuffatore e g è l'accelerazione di gravità che vale circa :
.
Il lavoro compiuto dalla forza peso del tuffatore è quindi :
62
e vale, sostituendo i dati numerici (che sono riportati nel grafico) :
.
Per calcolare la velocità con cui il tuffatore tocca l'acqua basta ricordare che la differenza di
energia
cinetica (in assenza di attriti) eguaglia il lavoro fatto dalla forza peso. Siccome il tuffatore parte da
fermo, la differenza di energia cinetica è uguale all'energia cinetica finale. Si ha allora :
.
Per ricavare la velocità basta isolarla alla sinistra dell'uguale. Per fare questo si può moltiplicare
ambo
i membri per 2 ottenendo :
da cui :
.
Ora si può dividere ambo i membri per m :
ed ottenere :
.
Per ottenere la velocità v basta estrarre la radice quadrata di entrambi i membri ottenendo infine :
(questo dipende dal fatto che se un numero al quadrato è uguale ad un altro numero, il primo è
uguale
alla radice quadrata del secondo, per esempio se
allora
).
Sostituendo i valori numerici otteniamo :
.
Si possono a questo punto fare due interessanti considerazioni :
63
- 1 - nella formula appena trovata manca la massa del tuffatore. Corrisponde all'importante
fatto già noto che i corpi cadono tutti con la stessa accelerazione indipendentemente
dalla loro massa.
- 2 - se esprimiamo il risultato della velocità con cui il tuffatore tocca l'acqua in km/h ,
otteniamo
.
Se il tuffatore cadesse invece che sull'acqua sul cemento (da 10 metri) i risultati
sarebbero
sicuramente nefasti. Orbene, un motociclista che urtasse un ostacolo rigido alla velocità
di
50 km/h subirebbe gli stessi effetti ...
Energia potenziale
01 - Energia potenziale.
Consideriamo un corpo di massa m immerso nel campo gravitazionale terrestre. Se lo lasciamo
cadere, la forza peso p che agisce sul corpo compie un lavoro. Se lo lasciamo cadere da una
altezza
maggiore il lavoro compiuto è maggiore, se l'altezza è minore, il lavoro è minore. Questo lavoro
equivale
(trascurando gli attriti con l'aria) all'energia cinetica che il corpo possiede al momento dell'impatto
con
il terreno.
La capacità, l'attitudine, che ha il corpo nel compiere un lavoro per il fatto di trovarsi in una certa
posizione all'interno di un campo di forze si chiama energia potenziale.
Possiamo allora affermare che l'energia potenziale di un corpo è l' energia di posizione che esso
possiede in potenza e che può trasformarsi in lavoro.
Nell'esempio del campo gravitazionale, diremo che il corpo possiede una energia potenziale
gravitazionale.
Una situazione analoga si ha quando un corpo è collegato ad una molla tesa. In questo caso,
maggiore
è la tensione della molla maggiore è il lavoro che il corpo ad esso collegato può compiere. Anche
64
in
questo caso possiamo dire che il corpo possiede una energia potenziale dipendente da quanto la
molla
è tesa, quindi dalla posizione del corpo. In questo caso, trattandosi di un campo di forze elastiche,
diremo che il corpo possiede una energia potenziale elastica.
Vi sono altri tipi di energia potenziale in dipendenza del tipo di campo di forze presenti. Per
esempio
assume una particolare importanza (anche per la vita di tutti i giorni) l'energia potenziale
elettrica.
02 - Energia potenziale gravitazionale.
L'energia potenziale gravitazionale è l'energia che un corpo possiede per il semplice motivo di
essere in una certa posizione all'interno di un campo gravitazionale.
Nel caso illustrato dalla figura abbiamo un corpo di massa m ad un'altezza pari ad h da terra (o
rispetto ad un qualsiasi altro piano di riferimento parallelo alla superficie terrestre). Il corpo, in
quanto
immerso nel campo gravitazionale terrestre, è soggetto alla forza peso
.
Se il corpo viene lasciato cadere, come abbiamo già visto, esso acquisterà, quando sarà in procinto
di toccare terra, una energia cinetica pari al lavoro che la forza peso compie nel tragitto lungo h .
E' per questo motivo che diciamo che il corpo possiede una energia potenziale gravitazionale,
proprio
perché il corpo (ovvero la forza peso applicata su di lui) è in grado di compiere un lavoro grazie al
fatto di essere posizionato ad una certa altezza da terra (o da qualsiasi piano di riferimento).
Determiniamo ora il valore dell'energia potenziale gravitazionale. Per fare questo consideriamo il
lavoro
che si compie per portare il corpo dal suolo alla quota h rispetto a terra. Questo lavoro compiuto
sarà
esattamente uguale all'energia potenziale che il corpo avrà alla quota h .
Per fare questo applichiamo sul corpo a terra una forza
del peso del corpo :
rivolta verso l'alto lievemente maggiore
65
In questo modo, essendo la risultante fra le due forze diversa da zero e rivolta verso l'alto, il corpo
comincerà a salire. Subito dopo che il corpo comincia la sua ascesa, rendiamo la forza
esattamente
pari (in intensità) alla forza peso. Così, essendo nulla la risultante delle forze, il corpo salirà di
moto
rettilineo uniforme (con velocità costante, anche se piccola). Poco prima di arrivare alla quota h ,
diminuiamo l'intensità della forza
in modo da far sì che la risultante diventi lievemente rivolta
verso il basso. In questo modo il corpo comincerà a decelerare finché, giunto alla quota h , esso
sarà del tutto fermo.
Che lavoro ha compiuto la forza
? Considerando che le lievi differenze che essa ha avuto in
intensità
rispetto alla forza peso (all'inizio del percorso ed alla fine) si neutralizzano a vicenda, tale lavoro
sarà :
.
Essendo la forza peso (per il secondo principio della dinamica) :
(dove g è l'accelerazione di gravità) avremo :
.
Questa semplice formula ci dà il lavoro fatto per portare un corpo di massa m alla quota h in
presenza
del campo gravitazionale terrestre.
Questo lavoro sarà pari all'energia potenziale gravitazionale che il corpo ha alla quota h .
Scriveremo
allora :
dove con U si indica comunemente tale energia potenziale.
66
Questa energia potenziale è, ovviamente, uguale al lavoro fatto dalla forza peso quando il corpo
cade
dalla quota h e raggiunge il terreno.
Si noti infine che l'energia potenziale gravitazionale (così come ogni altro tipo di energia
potenziale) non
è una grandezza assoluta, bensì essa dipende dal piano di riferimento rispetto al quale si riferisce
la
quota h . Cambiando piano di riferimento, l'energia potenziale gravitazionale
cambia. Conservazione
dell'energia
Un corpo che cade da un'altezza h tocca il terreno con una energia cinetica (trascurando la
resistenza
dell'aria) pari a :
.
Questa energia cinetica, come sappiamo, è uguale al lavoro fatto dalla forza peso :
.
D'altra parte, l'energia potenziale gravitazionale del corpo quando si trova alla quota h è :
.
Essendo l'energia potenziale uguale al lavoro fatto dalla forza peso e quindi all'energia cinetica
nel momento in cui il corpo tocca terra, possiamo affermare che tutta l'energia potenziale
si è trasformata in energia cinetica (in assenza di attriti).
Questo fatto è di enorme importanza e va sotto il nome di conservazione dell'energia meccanica.
Durante la caduta, il corpo perde la propria energia potenziale perché, quando esso raggiunge il
terreno, il valore della quota è nullo e quindi l'energia potenziale diventa nulla (
Dove finisce questa energia potenziale perduta ? Essa si è trasformata in energia cinetica.
).
Questo è vero quando il corpo non subisce attriti con l'aria. In presenza di resistenza dell'aria (e
questa resistenza non è mai del tutto eliminabile), il corpo tocca terra con una velocità minore e
quindi
una energia cinetica minore (del valore dell'energia potenziale iniziale).
Dove ritroviamo questa differenza di energia ? Essa si trasforma in calore facendo aumentare
(anche
se lievemente) la temperatura dell'aria. Inoltre, dal momento in cui il corpo tocca il terreno al
momento
in cui esso è completamente fermo, l'energia cinetica si è trasformata tutta quanta in calore trasferito
al
terreno e al corpo stesso.
67
Onde elettromagnetiche
PAGINA IN COSTRUZIONE
01 - Onde elettromagnetiche.
In questa pagina introduciamo il concetto di onda elettromagnetica in modo intuitivo. Una
trattazione più approfondita è possibile solo con l'aiuto di una matematica piuttosto sofisticata.
Rimandiamo quindi più avanti in questo corso un tale approfondimento.
Fin qui abbiamo visto essenzialmente che :
- cariche elettriche immobili creano un campo elettrico costante (detto campo
elettrostatico)
- cariche elettriche in movimento creano un campo elettrico variabile
- cariche elettriche in movimento uniforme (una corrente elettrica continua) creano un
campo magnetico costante (detto campo magnetostatico)
- cariche elettriche in movimento non uniforme (una corrente elettrica variabile (in
particolare alternata)) creano un campo magnetico variabile
- un campo magnetico variabile crea un campo elettrico variabile.
A causa di un principio di generale simmetria al quale la natura sembra obbedire, si può allora
supporre anche che :
- un campo elettrico variabile crea un campo magnetico variabile.
Le due ultime affermazioni (un campo magnetico variabile crea un campo elettrico variabile,
un campo elettrico variabile crea un campo magnetico variabile) sono di fondamentale
importanza.
Campo elettrico e campo magnetico possono così essere immaginati come diversi "aspetti" di
un solo campo, il campo elettromagnetico.
Il grande Maxwell nel 1873, con mirabile sintesi, propose quatto equazioni che riassumevano
tutti i fenomeni elettromagnetici noti fino a lui.
Lavorando matematicamente attorno alle sue equazioni egli si "accorse" che il campo
elettromagnetico si "doveva" propagare nello spazio come onde.
Maxwell aveva così "scoperto" per via del tutto teorica l'esistenza delle onde elettromagnetiche e
ne dedusse (sempre matematicamente) tutte le proprietà.
68
Dimostrò che si trattava di onde costituite da oscillazioni dei vettori (campo elettrico) e
(campo magnetico) perpendicolari alla direzione di propagazione (per questo si chiamano onde
trasversali) e che (le onde) dovevano viaggiare nel vuoto alla velocità di circa :
.
Una tale velocità era già nota da tempo e corrispondeva alla velocità della luce. Si capì allora che
la luce è un particolare tipo di onda elettromagnetica a cui il nostro occhio è sensibile.
Per informazioni sulle grandezze fisiche relative alle onde elettromagnetiche e per una
descrizione dello spettro elettromagnetico si veda la pagina :
../SpettroElettr/SpettroElettr.htm .
Solo più tardi la straordinaria intuizione matematica di Maxwell fu soggetta a verifica
sperimentale da parte di Hertz e così si aprì per l'umanità una nuova era, l'era delle
telecomunicazioni via radio.
Ma vediamo ora come le onde elettromagnetiche possono essere comprese in linea di principio
ed intuitivamente sulla base dei fenomeni elettromagnetici studiati fin qui.
Consideriamo un filo metallico rettilineo, detto antenna trasmittente, in cui in qualche modo è
fatta circolare una corrente elettrica alternata , ovvero tale per cui gli elettroni si muovano "su
e giù" (lungo il filo) alternativamente secondo una certa frequenza.
Graficamente :
Come ben sappiamo, una tale corrente crea un campo magnetico
campo è esso stesso alternato (si può dire anche oscillante).
attorno all'antenna e tale
Graficamente :
69
(le doppie frecce indicano l'oscillazione di
)
(la circonferenza tratteggiata è una linea di forza magnetica a tutti i punti della quale è
tangente il vettore )
Il campo magnetico oscillante
perpendicolare a .
genererà un campo elettrico oscillante
. Esso risulta
Graficamente :
Ma un campo elettrico variabile crea un campo magnetico variabile e così via.
Graficamente :
70
Naturalmente ciò avviene in ogni punto dello spazio attorno all'antenna trasmittente.
La linea rettilinea tratteggiata rappresenta una direzione di propagazione.
Si noti che se si interrompe la circolazione della corrente oscillante nell'antenna trasmittente,
l'onda elettromagnetica precedentemente prodotta continua il suo moto di propagazione.
Questo fatto è di fondamentale importanza e ci fa intuire che un'onda elettromagnetica non è
solo un'astrazione matematica di meri vettori
e , ma una entità fisica "reale".
Se un'onda elettromagnetica incontra nel suo cammino un'antenna ricevente (un filo
conduttore analogo ad un'antenna trasmittente) in essa il campo elettrico trasportato dall'onda
genererà, facendo oscillare gli elettroni liberi (presenti nell'antenna ricevente), una corrente
analoga a quella che circolava nell'antenna trasmittente.
In questo modo siamo in grado di trasmettere e ricevere informazioni e ciò è alla base di tutti i
sistemi di telecomunicazione radio (tv ecc.).
71
Spettroscopia
La radiazione elettromagnetica (in particolare la luce) è caratterizzata dalla frequenza ("ni") o
dalla lunghezza
d'onda
("lamda"). Frequenza e lunghezza d'onda sono legate dalla formula fondamentale :
dove c è la velocità della luce (nel vuoto circa 300.000 km/s ).
Frequenza e lunghezza d'onda sono grandezze inversamente proporzionali.
Per la luce, la frequenza minore, ovvero la lunghezza d'onda maggiore, corrisponde al rosso,
mentre la frequenza
maggiore, ovvero la lunghezza d'onda minore, corrisponde al violetto.
Se abbiamo una radiazione elettromagnetica composta da più frequenze (in particolare anche da
una singola
frequenza !) si dice che siamo in presenza di uno spettro elettromagnetico.
Esistono spettri continui, cioè le cui frequenze passano con continuità da un valore minimo ad uno
massimo, e
spettri discreti, per i quali si hanno solo ben definite frequenze corrispondenti a valori discontinui.
Esistono spettri di emissione, quando è un corpo ad emettere la radiazione, e spettri di
assorbimento, quando
un corpo, di solito più freddo, assorbe la radiazione emessa da un corpo di solito più caldo.
Lo studio e la classificazione degli spettri, tramite la spettroscopia e la spettrometria, trae origine
da Newton
stesso ed assume grande sviluppo nell' '800 come scienza empirica (senza che si conoscessero le
ragioni teoriche
che spiegano gli spettri stessi). La comprensione e la spiegazione completa degli spettri
elettromagnetici si ha
nel '900 grazie all'avvento della meccanica quantistica.
Uno spettroscopio, con il quale si esamina uno spettro, è costituito essenzialmente da un prisma :
72
Esso scompone la luce nelle varie frequenze a causa del fenomeno della dispersione (diversi angoli
di rifrazione
dipendenti dalla frequenza).
La spettroscopia è un capitolo della fisica di fondamentale importanza per esempio per le
applicazioni in chimica
ed in astronomia.
Richiamiamo ora le basi teoriche con le quali è possibile capire le caratteristiche degli spettri.
Secondo il modello atomico di Niels Bohr (1913) gli elettroni ruotano attorno al nucleo su orbite
permesse che
corrispondono a certi ben precisi valori di energia. Non sono quindi possibili orbite qualsiasi,
corrispondenti
ad energie qualsiasi. Questa affermazione va contro le leggi della meccanica classica secondo la
quale ogni orbita
dovrebbe essere possibile. Per correggere la meccanica classica, non più valida per i fenomeni
atomici e subatomici,
è stata appunto introdotta la meccanica quantistica.
Il modello atomico di Bohr è ispirato alla nascente meccanica quantistica. Naturalmente si tratta
di un modello un
po' "rudimentale" (successivamente è stato corretto ed affinato) ma è adatto per comprendere i
concetti fondamentali
della spettroscopia.
Per semplicità consideriamo l'atomo di idrogeno. Esso può essere rappresentato, nel modello di
Bohr, nel seguente
modo :
(il numero e la forma delle orbite sono qui indicativi)
L'elettrone (carico negativamente) ruota attorno al protone (positivo, posto al centro) e può farlo
solo su ben precise
orbite. Le orbite più interne corrispondono ad energie dell'elettrone minori, quelle più esterne ad
energie maggiori.
Il livello più interno, quello con energia minore, si chiama livello fondamentale.
73
Per esemplificare il tutto, associamo ad ogni orbita un valore simbolico di energia come indicato in
figura :
Un elettrone può "saltare" da un'orbita ad un'altra più esterna se riceve dall'esterno una energia pari
alla differenza
fra le energie delle orbite. Per esempio, se un elettrone si trova nell'orbita ad energia 10 e riceve
energia 4 , allora
passa nell'orbita 14.
Se ricevesse solo energia 3 esso non potrebbe fare il "salto" e passare nell'orbita 14 !!! Questo
fatto è di fondamentale
importanza.
Viceversa, se un elettrone si trova nell'orbita 14 può saltare nell'orbita 10 cedendo energia 4
sotto forma di un
fotone, un quanto di energia elettromagnetica.
74
Se un elettrone si trova in un'orbita più esterna, esso può passare ad un'orbita interna con un salto
unico o con più salti.
Per esempio, un elettrone da 16 può passare a 10 emettendo 6 oppure emettendo 2 e 4 . Un
atomo allora può
emettere od assorbire una serie molto complessa di energie, tutte le possibili "combinazioni" delle
differenze fra i livelli
energetici.
Gli scambi energetici fra radiazione elettromagnetica ed elettroni negli atomi "funzionano" così,
per emissione ed assorbimento
di quanti di energia ben precisa, i fotoni, corrispondenti alle differenze fra le energia delle varie
orbite possibili.
L'energia di ogni singolo fotone scambiato vale :
dove h è la costante di Planck e
la frequenza della radiazione associata al fotone. Per la luce,
fotoni ad energia
minore sono quelli corrispondenti alla luce rossa, fotoni ad energia maggiore sono quelli della luce
violetta.
Questi sono fra i concetti fondamentali della meccanica quantistica.
Proviamo ora a spiegare i vari tipi di spettro alla luce di quanto sopra affermato.
- spettro di emissione continuo
Gli atomi e le molecole della materia a densità non piccola emettono uno spettro continuo perché i
fotoni vengono
emessi praticamente a tutte le energie ed anche perché l'energia viene scambiata per urti fra gli
atomi (non approfondiamo
qui i motivi molto complessi di tale tipo di emissione).
Riportiamo qui un esempio di spettro continuo nel visibile (luce) :
75
(spettro continuo)
Presentano tale spettro radiazioni quali la luce solare (vedi più avanti), la luce emessa dalle normali
lampadine ad
incandescenza, corpi densi caldi ecc. ecc.
- spettro di emissione discreto
Consideriamo un gas rarefatto (così che l'energia venga scambiata poco per urti fra gli atomi) ed
eccitiamo tale
gas per esempio dandogli energia tramite scariche elettriche. Gli elettroni, guadagnando energia
dalle scariche
elettriche, saltano continuamente su orbite con energia maggiore. Quando poi ve ne
discendono (tendendo a
portarsi sul livello fondamentale) emettono fotoni di energia ben precisa corrispondente
alle differenze fra i livelli
energetici. Il risultato di tutto ciò è uno spettro di emissione discreto (discontinuo) formato da
righe ciascuna
delle quali corrisponde all'energia (e quindi alla frequenza, essendo
) differenza fra i vari
livelli energetici.
Per esempio, nel caso dell'idrogeno :
(spettro di emissione dell'idrogeno atomico eccitato da scarica elettrica)
Esempi di tali spettri sono quelli emessi dalla lampade stradali al sodio (gialle) ecc. ecc.
- spettro di assorbimento
E' il caso più complesso e più interessante per esempio per le implicazioni in astronomia.
Consideriamo della radiazione a spettro continuo e facciamola passare per esempio attraverso un
gas rarefatto di idrogeno
a temperatura non alta. I fotoni di tutte le energie (frequenze) passano attraverso l'idrogeno e lo
eccitano facendo saltare
gli elettroni a livelli energetici maggiori. Questi fotoni vengono assorbiti, quindi scompaiono dalla
radiazione incidente
l'idrogeno. Quando poi gli elettroni ritornano ai loro livelli fondamentali rimettono le
stesse frequenze assorbite, ma in
direzioni in generale diverse, per cui la radiazione che fuoriesce e che colpisce l'osservatore, dopo
avere attraversato
l'idrogeno, risulta carente delle frequenze precedentemente assorbite dall'idrogeno. Risultato, si
76
ottiene uno spettro
di assorbimento costituito da uno spettro di emissione continuo (quello della radiazione incidente)
in cui sono presenti
delle righe nere in corrispondenza delle frequenza assorbite.
Schematicamente :
Riportiamo qui uno spettro solare in cui sono evidenziate righe di assorbimento :
(spettro solare di assorbimento)
Si noti che le righe di assorbimento corrispondono alle analoghe righe di emissione dei medesimi
atomi.
Gli spettri di assorbimento costituiscono uno strumento decisivo per comprendere la composizione
delle stelle.
La radiazione ad alta energia e a spettro continuo prodotta dal nucleo delle stelle in cui avviene la
fusione nucleare
passa attraverso l'atmosfera della stella costituita da gas rarefatto freddo (rispetto al materiale
sottostante). Gli atomi
dell'atmosfera stellare vengono così eccitati e producono spettri di assorbimento.
Siccome ogni specie atomica (e molecolare) ha una propria unica sequenza di righe di emissione
(che ne sostituiscono
una sorta di "impronta digitale"), osservando uno spettro di assorbimento siamo in grado di
"decifrare" la composizione
dell'atmosfera stellare.
Schematicamente :
77
La spettroscopia è utilizzata in innumerevoli altre applicazioni sia nell'ambito fisico, chimico ed
astronomico.
Lo spettro elettromagnetico
Le onde elettromagnetiche hanno uno spettro molto ampio : dalle onde radio ai raggi gamma
comprendendo la luce visibile. Le onde elettromagnetiche sono emesse essenzialmente da cariche
elettriche in movimento accelerato, dai "salti" degli elettroni da un orbitale ad uno più interno
negli atomi e dai processi di decadimento e disintegrazione del nucleo atomico.
Un'onda è caratterizzata principalmente dalla lunghezza d'onda
( "lamda" ) che si misura in
metri, dal periodo T che si misura in secondi, dalla frequenza
( "ni" )che si misura in hertz e
dalla velocità c che nel vuoto e per ogni tipo di onda elettromagnetica vale circa 300.000.000 m/s
(
).
La lunghezza d'onda è la distanza fra due creste, il periodo è il tempo fra due creste ovvero la
durata di un'oscillazione completa e la frequenza è il numero che rappresenta quante oscillazioni
complete compie un'onda nell'unità di tempo.
Le relazioni matematiche fra tali grandezze sono di fondamentale importanza.
Abbiamo evidentemente che :
e
.
78
Infatti, se, per esempio, per compiere una oscillazione intera un'onda impiega 2 secondi ( T = 2 )
allora in un secondo avvengono 0,5 ( 1/2 ) oscillazioni, per cui la frequenza è 0,5 hertz e
viceversa.
L'altra fondamentale relazione è
.
Da questa formula si può ricavare, essendo c nota, direttamente
oppure
.
Si ha cioè :
e
.
La spiegazione della formula
è la seguente :
.
Per esempio se un'onda elettromagnetica ha una lunghezza d'onda di 600 nm ( 1 nm = 1 nanometro
=
metri ), la sua frequenza è :
.
Si noti l'incredibile numero di oscillazioni al secondo corrispondente a questa radiazione
elettromagnetica che fa parte del visibile.
Occorre infine tenere presente anche la formula quantistica :
dove E è l'energia dei fotoni associati all'onda elettromagnetica ed h è la costante di Planck che
vale circa
(valore indicativo) . Da questa formula si deduce che maggiore è la frequenza di
un'onda elettromagnetica maggiore è l'energia dei fotoni ad essa associati.
Le radiazioni elettromagnetiche si suddividono nel seguente spettro :
79
Sulle onde radio si basano le trasmissioni radio-televisive. Le microonde sono alla base delle
trasmissioni per telefoni mobili, radar ma sono usate anche per costruire forni ecc. . Gli infrarossi
(IR) sono emessi da tutti i corpi a qualunque temperatura. Il visibile è il campo di radiazioni
elettromagnetiche percettibili dall'occhio. Gli ultravioletti (UV) vengono emessi da salti piuttosto
energetici di elettroni negli atomi così come i raggi X. Infine, i raggi gamma, le radiazioni
elettromagnetiche a maggiore frequenza e di conseguenza minore lunghezza d'onda, sono prodotti
dai fenomeni che coinvolgono altissime energie (disintegrazioni di nuclei atomici per radioattività
o altro, esplosioni di supernovae, raggi cosmici ecc.).
10 - Perché al tramonto il sole appare più rosso.
La luce "bianca" del sole è composta di varie frequenze (dal rosso al violetto). Con un prisma, per
esempio, si ottiene la loro separazione (si pensi anche all'arcobaleno).
La luce del sole, attraversando l'atmosfera che è composta da vari gas, impurità ecc. , ne viene in
qualche modo "scomposta". La componente blu-violetta viene diffusa ("sparpagliata" in tutte le
direzioni) e progressivamente assorbita. E' per questo che il cielo appare blu. La componente rossa,
invece, prosegue nel suo percorso nell'atmosfera molto meno disturbata.
Quando il sole è allo zenit (sopra le nostre teste), lo spessore di atmosfera che i suoi raggi
attraversano
è minimo ed a terra arrivano ancora molti raggi di colore blu-violetto.
Al tramonto, invece, la luce del sole attraversa molta più atmosfera, per cui la maggioranza della
80
luce
blu-violetta viene diffusa ed assorbita. A terra arriveranno in maggioranza le frequenza rosse.
Ecco la spiegazione scientifica dei meravigliosi e romantici ... tramonti rossi.
11 - Perché la luna appare rossa durante una eclissi di luna.
Per gli stessi motivi per cui i tramonti appaiono rossi, la luna, durante una eclissi totale di luna,
appare
rossastra.
Infatti, quando la luna entra nel cono d'ombra della terra, essa è colpita dai raggi di sole che, resi
rossastri a causa della diffusione ed assorbimento delle frequenze blu-violette, e deviati nella loro
traiettoria, colpiscono infine la luna.
81