Gli azionamenti dei motori
• Per azionamento si intende, in generale, un
insieme di apparecchiature, gruppi
convertitori, attuatori, organi di
trasmissione, macchine operatrici,
dispositivi di controllo.
azionamento
• la sua funzione è lo svolgimento di un certo
numero di operazioni, quali cicli di
lavorazione o movimenti di organi
meccanici, con prestabilite leggi di moto
(posizione e velocità).
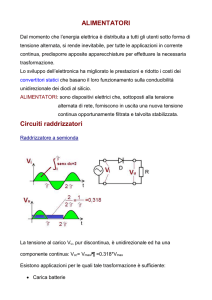
I quadranti di un azionamento
motore cc
Velocità
Freno meccanico/generatore elett.
Q2
w> 0
C< 0
P< 0
motore
Q3
w< 0
C< 0
P> 0
motore
Q1
w> 0
C> 0
P> 0
Q4
w< 0
C> 0
P< 0
Coppia
Freno meccanico/generatore elett.
Le varie fasi del movimento possono essere riassunte
dallo schema seguente
Velocità
Tempo
Caratteristica del mat al variare di s
Per gli azionamenti di motori funzionanti in
corrente alternata si avranno :
• regolazione mediante reostato di avviamento e
numero di poli ;
• regolazione tramite controllo dell’ampiezza
della tensione ;
• regolazione tramite controllo della tensione e
della frequenza.
Unità N° 1:
Generalità sui dispositivi elettronici di potenza
• I moderni sistemi di controllo e comando delle
macchine elettriche impiegano diffusamente dispositivi
elettronici di potenza, grazie ai quali è possibile, ad
esempio automatizzare e ottimizzare la regolazione
della velocità
I dispositivi a semiconduttore sono utilizzati come
interruttori
I
OFF
I=0
V
I
ON
I>0
Ordine di grandezza dei parametri
elettrici
Tensioni: kV
Applicazioni di potenza
Correnti: A - kA
Potenze: kW - MW
Dispositivi elettronici di potenza
• DIODI
• SCR (Raddrizzatori Controllati al Si)*
• SWITCH CONTROLLATI:
- BJT
- MOSFET
- IGBT
- GTO* (Gate Turn-Off)
* SCR e GTO = TIRISTORI
IGBT
• Transistor IGBT (Insulated Gate Bipolar
Transistor) sono transistor BJT con integrato uno stadio di comando a MOS. Sono
pilotabili, quindi, in tensione. Hanno perdite
di comando e frequenze operative
intermedie tra MOSFET e BJT.
IGBT
C
G
E
CONFRONTO
Prestazioni limite dei vari componenti
tiristori
[kV]
5
GTO
4
3
MCT
IGBT
BJT
2
1
00
sviluppo
previsto
per l’MCT
MOSFET
0.5
1
1 kHz
10 kHz
100 kHz
1.5
[kA]
2
2.5
3
3.51 MHz
Confronto tra dispositivi controllati
Proprietà relative degli switch controllati
dispositivo
potenza pilotabile
velocità di commutazione
BJT/MD
MOSFET
GTO
IGBT
MCT
Media
Bassa
Alta
Media
Media
Media
Alta
Bassa
Media
Media
Gli inverter
•
•
•
•
•
•
Gli inverter
Negli inverter si riconoscono tre parti fondamentali:
il raddrizzatore detto anche convertitore CA-CC
il filtro
il convertitore CC-CA
Scopo del raddrizzatore è di trasformare la corrente
alternata monofase e trifase in c.c..
• Spesso ha anche il compito di recuperare l’energia elettrica
durante la fase di frenatura.
INVERTER
Filtro
Convertitore
dc-ac
Inverter
M
3~
Schema generale di un azionamento con
motore elettrico
Rete di alimentazione
AC
Convertitore AC/DC
INVERTER
MOTORE
M
CONTROLLO
COMANDO
DUE CASI
• Rete di alimentazione in corrente continua (es.
linee ferroviarie): solo INVERTERS (fig.2)
• Rete di alimentazione in alternata:doppia
conversione per avere a monte del motore
l’alternata a frequenza variabile (caso della pagina
precedente - fig. 3)
AC/DC
DC/AC
M
M
Fig. 2
DC/AC
Fig. 3
INVERTER
Raddrizzatore non controllato a ponte
monofase
Raddrizzatore a ponte monofase
• Condensatore adeguato lato DC per filtraggio e accumulo
energia
Analisi del raddrizzatore a ponte con
induttanza non nulla lato AC
A
B
• Ip.: corrente d’uscita Id costante
Raddrizzamento
FILTRAGGIO
L1
L2
CONVERTITORI AC-DC TRIFASI
L3
T1
T3
T5
L
R
E
T4
T6
Impulsi ai gate
T2
Per capire il funzionamento, si farà il caso semplice di un
convertitore a ponte di SCR, con carico resistivo
Vs = Vmax sin t
id
T1
T2
R
vs
T3
T4
vd
FUNZIONAMENTO
Vs > 0: T1 e T4 sono polarizzati direttamente; si possono
accendere con l’impulso di gate, mentre T3 e T4 sono
polarizzati in inversa
Vs < 0: è il contrario del caso sopra!
vd
t =
Variando l’angolo di innesco,
la Vd si modifica e varia, di
conseguenza, la tensione
media sul carico (<Vd>).
= angolo di innesco
Ig1
Ig2
Ig3
Ig4
<Vd> = valor medio della Vd
<Vd> = Vmax (1+cos )/
<Vd> = Vmax (1+cos )/
• I valori medi dipendono da ;
• La conduzione è discontinua per
compreso fra 0 e ;
• Conduzione discontinua = una coppia di
SCR si spegne prima che si accende
l’altra coppia di SCR.
Dimostrazione del valor medio
1 t
1
Vmedio Vmax sin d Vmax sin d
T 0
0
Vmax
Vmax
[ cos ]0
(1 cos ).
Principio di funzionamento di un INVERTER
monofase
Vi
Vi
R
B
A
Vi
Vu
t
1
2
Vu
Fig. 1
t
T
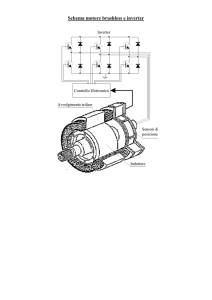
SIX STEP
Il six-step, viene alimentato in
corrente continua mediante
raddrizzatore interposto tra il
dispositivo stesso e la rete.
il six-step è composto da 6 contatti
statici chiamati switch,
a seconda dell’ordine di chiusura e
della loro frequenza generano onde
quadre.
Ogni colonna di switch viene
chiamata "gamba di inverter"
A seconda della sequenza di
chiusura degli switch le tensioni UA,
UB, UC, localizzate rispettivamente
nei punti A, B, C, si posizioneranno
sul "+" o sul "-" .
Schema a blocchi dell’INVERTER con controllo PWM
Oscillatore
Portante
Alimentatore
Oscillatore
Modulante
Vin
Modulatore
PWM
Invertitore
Vout
Oscillatore modulante: fornisce al modulatore il riferimento di tensione sinusoidale con
frequenza pari a quella desiderata in uscita;
Portante: forma d’onda triangolare con fp >> fm;
Modulatore: confronta istante per istante i valori del s.le modulante e di quello portante e
invia il comando di commutazione dell’invertitore;
Alimentatore: tensione costante.
PWM
t
1a 3a 5a 7a 9a 11a
armoniche
f
t
1a 3a 5a 7a 9a 11a
armoniche
f
t
1a 3a 5a 7a 9a 11a
f
armoniche
Gli inconvenienti
presenti nel sixstep vengono
superati con gli
inverter drive
PWM.
PWM
PWM
• Schema a blocchi inverter PWM
CONTROLLO SCALARE DEL M.A.T.
CONTROLLO DELLA VELOVITA’ VOLT/HERTZ A CATENA CHIUSA
V/Hz = il rapporto Vs/a, è costante.
Dove: Vs = tensione statorica;
a = pulsazione di alimentazione
a
Cm
Accelerazione
Decelerazione
a
Regolazione motori
• La regolazione della velocità dei motori
elettrici può essere ottenuta o impiegando
motori in corrente continua regolando la
tensione di armatura o di
eccitazione(PWM), oppure impiegando
motori in corrente alternata regolando la
frequenza di alimentazione
Numero poli
• Esistono dei motori asincroni che , per
costruzione, possono funzionare a due
diverse velocità. Questi motori hanno lo
statore dotato di uno speciale avvolgimento
che consente di eseguire il raddoppio del
numero dei poli.
• Regolazione tramite controllo dell’ampiezza della tensione.
Nel motore asincrono la coppia è legata al quadrato della
tensione di alimentazione : per questo motivo la variazione
della tensione modifica l’ordinata della caratteristica
meccanica, ma non il suo andamento. Le variazioni di tensione
non esercitano alcuna influenza sulla velocità a vuoto: le
variazioni invece provocano un aumento dello scorrimento e
una diminuzione della velocità quando il motore è sotto carico.
Un tale sistema è quindi particolarmente adatto per ottenere
delle piccole variazioni di velocità continue entro limiti
dell’ordine del 10%.
• Regolazione tramite controllo della tensione e della
frequenza. La seguente relazione n = 60f/p
• evidenzia la possibilità di variare la velocità agendo sulla
frequenza f della tensione di alimentazione del motore. Per
poter realizzare un buon azionamento occorre tener conto che :
• il flusso al traferro deve essere mantenuto costante al suo
valore nominale per un ottimo sfruttamento della macchina
che deve erogare coppia costante ;
•
la corrente assorbita dalla macchina non deve superare il
valore nominale per non incorrere a pericolosi
surriscaldamenti
• Funzionamento a coppia costante (flusso
costante).
• Ricordando che la coppia massima erogata dal
motore è data dall’espressione :
• considerando che X2(1)=2L2=s1 L2=2f1sL2
• esprimibile anche come
2
V1 1
3p
2
2
4 s m f 2 L2
• inoltre, nelle condizioni di funzionamento
poichè s rimane costante, tale espressione può
essere ricondotta al rapporto fra tensione e
frequenza, come di seguito riportato :
• TMax=k (U1N/f)2
• dove la costante vale
3p
1
k
2
2
4 s m 2 L2
potenza
c oppia
U1
U1N
c oppia
c ostante
potenza
c ostante
potenza
dec resc ente
f
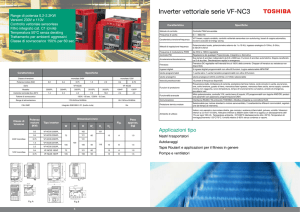
Unità N° 4
Applicazioni
Climatizzatori
• Un INVERTER difficilmente può essere immaginato come parte
integrante di un climatizzatore in quanto esso è già collegato alla
normale rete di distribuzione dell'energia elettrica pertanto per
comprendere bene lo scopo e le funzioni dei climatizzatori inverter
è bene fare una piccola precisazione: nei climatizzatori in realtà il
sistema "INVERTER" è composto da due componenti: un
raddrizzatore di corrente e l'inverter vero e proprio.
• Il raddrizzatore si occupa di trasformare la corrente alternata della
rete elettrica in corrente continua che poi viene nuovamente
trasformata in corrente alternata dall'inverter.
• Paranco
• E’ un sistema montato
su carrello scorrevole
su rotaia in grado di
sollevare carichi anche
in modo continuativo:
rotoli di carta, pezzi di
utensili,…
M1
M2
• Il motore di spostamento M1 deve
avere:
• Avvio progressivo per evitare
dondolamenti del carico
• Avvicinamento a bassa velocità al
punto di arresto
• Si può realizzare l’azionamento con:
• Un m.a.t. associato ad un Controllo Di
Frequenza
• Regolazione velocità con rampe di
accelerazione e decelerazione
• Gamma di velocità 1:20
• 2 sensi di marcia con frenatura
• IP55 se all’aperto
• Il motore di sollevamento M2
neccessita:
• Progressione nel sollevamento per
evitare sovraccarichi
• Avvicinamento a bassa velocità
M1
M2
Controllo vettoriale di flusso
• In un azionamento scalare non è possibile ottenere coppia
nominale a bassissima velocità, vale a dire a 2 o 3Hz e in
generale sono utilizzabili tra 5 e 50Hz.
•
• I motori in corrente continua consentono invece di avere
coppie elevate anche a basse velocità, ciò è stato ottenuto,
tramite un opportuno orientamento del collettore e spazzole in
modo che le componenti di corrente che producono il flusso e
la corrente attiva che produce la coppia siano sempre
ortogonali.
• Ciò assicura che il controllo del motore in c.c. produca
facilmente la coppia desiderata a qualunque velocità.
• La presenza dello stesso collettore e delle
spazzole, richiedendo una costante
manutenzione, ha reso svantaggioso l’uso dei
motori in corrente continua a vantaggio degli
asincroni e dei brushless.
•
• Nel brushless è il sensore che rileva la
posizione del rotore e consente di avere
l’ortogonalità tra il flusso rotorico r e quello
statorico s.
N
r
r
s
r
s
s
I
• La risposta è stata il controllo vettoriale del
flusso.
• Negli azionamenti vettoriali, la scheda di
pilotaggio controlla le correnti che producono il
flusso e la coppia in modo da ottimizzare il
funzionamento e renderlo analogo al motore in
corrente continua.
La corrente totale (Is) è scomponibile
in una componente (Id) magnetizzante
o reattiva che produce il flusso e una
componente (Iq) attiva che produce la
coppia.
La componente magnetizzante
deve mantenersi costante nelle
diverse condizioni di carico ( flusso
costante).
Modulazione vettoriale /
orientamento di campo
• Nella modulazione vettoriale viene utilizzato un
modello matematico del motore. La corrente
presente nello statore del motore viene misurata e
viene scomposta nei vettori corrente rotore e
corrente reattiva, dove
• • la corrente rotore genera la coppia motrice
• • la corrente reattiva genera il flusso della
macchina
• E’ possibile ottenere ciò in due modi. Il primo modo è
il “Full Closed Vector Control “
• L’altro sistema è ad anello aperto, è più economico e
soddisfa tutte quelle richieste di azionamento che non
devono essere particolarmente sofisticate.
• la scheda di controllo non ha il sensore “sensorless” e
desume i parametri di funzionamento (velocità
coppia) indirettamente tramite la corrente assorbita
dal motore. Tramite un modello matematico si
ricostruisce un sistema virtuale ad anello chiuso
conclusione
• Con l'aiuto di entrambe queste
componenti della corrente, è possibile
intervenire in modo indipendente sia sulla
coppia, sia sul flusso magnetico, ottenendo
così una regolazione molto dinamica
Frenatura
• Il termine frenatura designa gli effetti
prodotti dall’energia che il motore ritorna
alla scheda pilota in alcune condizioni. Una
produzione di energia da parte del motore,si
ha quando un carico è decelerato
rapidamente o fermato, o quando in un
controllo di un moto verticale, il carico è
abbassato.
frenatura
frenatura
• E’ possibile gestire questa energia in due
modi
• Frenatura dinamica – probabilmente il
metodo più comune di controllare la
rigenerazione. Essenzialmente il metodo
consiste nel predisporre un resistore che
assorbe l’energia generata e la dissipa sotto
forma di calore.
Filtro
Convertitore
dc-ac
Inverter
M
3~
• Frenatura rigenerativa. – Un raddrizzatore
controllato, usato in aggiunta a quello preesistente,
consente di rigenerare l’energia prodotta
recuperandola nella rete principale. La tecnica
rigenerativa, dati gli alti costi, è realizzata solo in
appicazioni particolari.
• Schema di inverter rigenerativo
• L’azionamento funziona in tutti quadranti.
M
frenatura
Frenatura con iniezione di corrente
continua: si rimanda a quanto già detto sugli
avviatori.