macchina in corrente
continua a magneti
permanenti
Attuatore di velocità e posizione
Struttura base del motore dc
Parti del motore
Struttura del motore a magneti
permanenti
Fasi montaggio rotore
DC-motor basics – DC-motor
Main parts:
Stator (Field)
Rotor with
commutator
(armature)
Simple DC Motor
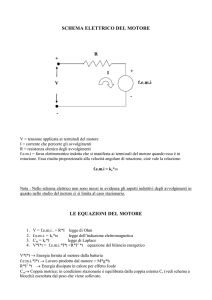
Cenni Teoria
Se
un conduttore è portato in un
campo magnetico una forza F è
esercitata sullo stesso.
Cenni teoria
Electric Motor
DC
Motor
Commutazione: Periodica inversione della
corrente
Nella realtà sono presenti più
conduttori
Quando
conduttore
di però
indotto,
L'andamentounreale
della corrente
si discosta da
tale
retta ed
all'incircadel
l'andamento
della seconda
tramite
la ha
lamella
collettore
curva
(rossa) dellaabbandona
stessa figura. Si capisce allora
cui è collegato,
il
come, essendo i valori di i (t) mediamente più elevati
contatto
conla densità
la spazzola,
laaumenta tanto più
di quelli ideali,
di corrente
quanto
minore
di contatto.
Al momento
corrente
cheè lalosuperficie
percorre
si
del
distacco
è massima.dal
inverte
passando
valore I/2 al
valore -I/2, ( conduttori rossi
nella animazione di destra),
Tutto questo è causa di
la
corrente segue l’andamento
surriscaldamento
delle lamelle e di
ideale
della retta tra
nera
in figura.e lamella
archi (scintillio)
spazzola
che viene abbandonata.
Tra
la spazzola e la lamella che sta per
essere abbandonata dalla spazzola si
stabilisce una elevata d.d.p. e, di
conseguenza, può scoccare una scintilla
tra la spazzola e la lamella nell'istante
del distacco (tale fenomeno viene favorito
dall'elevata temperatura della spazzola,
e dalle condizioni impure dell'aria
circostante il collettore per la presenza di
un pulviscolo derivante dal consumo
delle spazzole).
cio’ produce una rapida usura delle
spazzole e del collettore a lamelle.
Per
ridurre gli aspetti negativi conseguenti alla commutazione si può:
a)
aumentare la resistenza della spira in commutazione e ridurre i flussi
dispersi nell'indotto (ovvero ridurre l'induttanza della spira). In tal modo si riduce
la costante di tempo t = L / R [s] del transitorio di commutazione e la situazione
di regime viene raggiunta in un tempo più breve. Per aumentare la resistenza
della spira si adottano spazzole a base di grafite (conduttore non Ohmico) ad
elevata caduta di tensione;
b)
realizzare matasse di poche spire e calate in cave aperte (in tal modo i flussi
dispersi si riducono a causa dell'elevata riluttanza che essi incontrano nell'aria)
così che sia piccola la f.e.m. autoindotta che si oppone all'inversione della
corrente;
c)
realizzare l'induttore nella forma a poli sporgenti, così che la commutazione
avvenga in una zona ad elevato traferro e, quindi, ad elevata riluttanza del
circuito magnetico. In tal modo saranno più bassi i valori di induzione del
flusso tagliato dalla spira prossima alla commutazione e, con ciò, più basse
saranno le f.e.m. indotte che si oppongono all'inversione della corrente nella
spira.
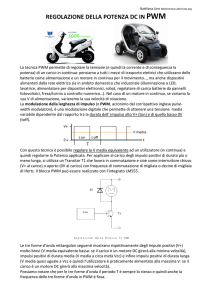
Il modello del motore a c c
a magneti permanenti
Rappresentazione del motore a c.c. dal punto di vista elettrico
Va: forza elettro-motrice,
Applicando al circuito in figura il secondo
principio
variabile
d’ingresso
di Kirkhoff otteniamo l’equazione:
Ra: resistenza elettrica degli
avvolgimenti del motore
di a
V a R a i a La
eg
dt La: induttanza (energia
conservativa) degli avvolgimenti,
è quella che si oppone alle
Dalla prima legge di Ohm sappiamo che:
variazioni della corrente.
R a i a rappresenta la caduta di tensione che si
eg: forza contro-elettromotrice, è
ha su una resistenza aR.
legata alla velocità di rotazione ω
di
Va Ra di
ia La
eg
rappresenta
ai
dt la variazione di tensione
L
ia: corrente che assorbe il motore
a
a
dt
capi di un’induttanza.
(la stessa che attraversa gli
avvolgimenti).
ANALOGIA MECCANICA
Sfruttando l’analogia tra grandezze meccaniche ed elettriche, si
ottiene:
tm: coppia motrice
B: coefficiente di attrito
J: inerzia
tm
d
B J
tr
dt
tr: coppia resistente
ω : velocità angolare del motore
APPLICHIAMO LA TRASFORMATA DI LAPLACE
Trovare le soluzioni di un’equazione differenziale non è sempre facile.
In alcuni casi si può utilizzare la “trasformata di Laplace”, ossia:
un operatore che trasforma una funzione della variabile reale (y = f(x)) in
una funzione della variabile complessa (y = F(s)).
Praticamente questo operatore trasforma l’equazione differenziale
in un’equazione algebrica facilmente risolvibile L: f(x)
F(s)
V a (t ) V a (s )
i a (t ) I a (s )
V a R a i a La
(t ) (s )
t m (t ) T m (s )
e g (t ) E g (s )
t r (t ) T r (s )
tm B J
d
tr
dt
t m kt i a
e g k
di a
eg
dt
Sostituendo le variabili in funzione di s
nelle nostre equazioni abbiamo:
V a R a I a s La I a E g
T m B s J T r
Tm kt I a
E g k
•
Prova a trovare le fdt
Ia
?
Va E g
?
Tm Tr
SCHEMA A BLOCCHI
Per ricavare lo schema a blocchi iniziamo a
ricavare Ia da questa formula:
Ia
V a E g I a R a s La
V a R a I a s La I a E g
Tm kt I a
E ricordando che
1
V a E g Possiamo disegnare la prima
R a s La
parte dello schema:
Come possiamo notare, l’uscita del blocco kt è tm e quindi …
Ricordando che:
T m B s J T r
e ricavando da tale formula Ω abbiamo:
1
T m T r
B s J
In questa formula compare Tm, che
sottratta a Tr e moltiplicata per la f. di
trasferimento dà la velocità Ω. Quindi
aggiungendo lo schema a blocchi
precedentemente illustrato a quello che
si ricava da questa formula otteniamo:
Inserendo nello schema a blocchi la formula:
E g k
Otteniamo lo schema a blocchi finale del Motore C.C.
Analisi statica
ANALISI A REGIME
Con coppia resistente Tr 0
Facendo trascorrere molto tempo, in modo tale che i
sistemi in regimi transitori siano sicuramente esauriti,
abbiamo:
lim f(t) = lim s F(s) = F(s = 0)
t
∞
s
0
Ponendo s = 0, lo schema a blocchi del motore a regime
con Tr 0 sarà il seguente:
La velocità Ω in questo caso sarà:
Gch
kt
Ra B
kt
V
V
k t k a
R a B k t k a
1
Ra B
G
1 GH
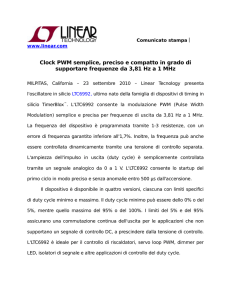
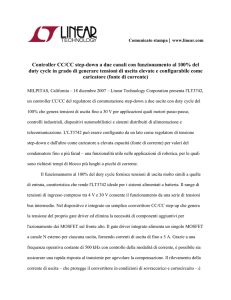
LA CARATTERISTICA DEL MOTORE C.C.
Grafico coppia – velocità (B trascurabile)
Tm kt I a
Ia
Va E g
Ra
E g k
Dalle
relazioni a
sinistra
possiamo
ricavare
l’equazione
della retta
Tm
Tm
V a k
k t
Ra
k t V a k t k
Ra
Ra
Da qui ricaviamo le
intersezioni con gli assi
Quando Ω = 0
Quando Tm = 0
kt Va
Tm
Ra
Va
k
Riportando questi valori
sul grafico otteniamo …
Caratteristica statica coppia - velocità
10
9
8
7
Caratteristica di funzionamento statico
Tm [Nm]
6
5
4
3
Punto di lavoro statico
2
Coppia resistente
1
0
0
5
10
15
20
25
30
omega [rad/s]
35
40
45
50
0
Tm
k t V a k t k
Ra
Ra
k t Va
k k
t
Ra
Ra
V
Kv
kt Va
Tm
Ra
kt Va kt k
Tm
Ra
Ra
Variando la tensione Va si ottiene una famiglia di rette
in cui cambia l’intercetta ma non il coefficiente angolare
A causa della relazione lineare inversa tra la coppia e la
velocità, la potenza massima si verifica nel momento in
cui
=½
t = ½ ts
,
di a
V a R a i a La
eg
dt
d
tm B J
tr
dt
Se la coppia resistente e l’attrito sono
trascurabili:
G
Gch
1 GH
kt
1
(
)
kt
R sL sJ
2
kt k v
s LJ sRJ kt k v
1
( R sL ) sJ
Radici distinte trascuro attrito
quella elettrica
t e = La / Ra
1/ Ke
1/ Ke
G(S )
2
(1 st m )(1 st e ) ( s t mt e s(t m t e ) 1
Trascurando nella somma la costante più piccola
1/ Ke
G(S )
(1 st m )(1 st e )
NB la costante di tempo elettrica (te) e la costante di tempo
meccanica (tm) che valgono rispettivamente:
t e = La / Ra
!!!
tm = Ra*J / KT*KE
Esistono solo se i poli sono reali e distinti !!!!
Per i valori tipici dei motori in commercio è possibile
definirli per cui la fdt vale
1/ Ke
G(S )
(1 st m )(1 st e )
!!!
Trovare la fdt
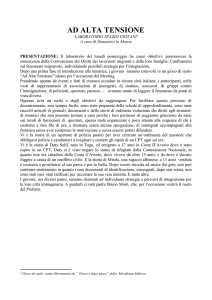
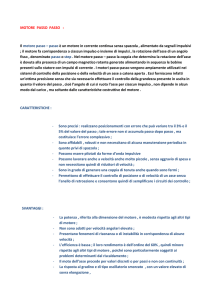
PWM
PWM(Pulse Width Modulation
Cambiando il duty cycle, la velocità
cambierà
Lo scopo è :
1. Ridurre la dissipazione di potenza.
2. Ridurre I problemi di raffreddamento dei transistors)
Duty Cycle 20%
Lowest Speed
Cycle
Duty Cycle 50%
Middle Speed
Duty
Cycle
(DT)
Duty Cycle = DT / T (%)
Figure : PWM Control Signal
Duty Cycle 80%
High Speed
Duty cycle
si
definisce duty cycle d il rapporto tra
la durata del segnale "alto"t ed il
periodo totaleT del segnale, e serve ad
esprimere per quanta porzione di
periodo il segnale è a livello alto:
t
d
t
T
PWM
Un segnale PWM (Pulse Width Modulation
ovvero modulazione a variazione della
larghezza d'impulso) è un' onda quadra di
duty cycle variabile che permette di
controllare l'assorbimento (la potenza
assorbita) di un carico elettrico(nel nostro
caso il motore DC), variando modulando)
il duty cycle.
Un segnale PWM è caratterizzato dalla
frequenza (fissa) e dal duty cycle
(variabile);
si deduce dalla Figura, il duty cycle è il
rapporto tra il tempo in cui l'onda
assume valore alto e il periodo T
(l'inverso della frequenza: T=1/f)
Es. un duty cycle dell'80% corrisponde
ad un'onda quadra che assume valore
alto per l'80% del tempo e basso per il
restante 20%,
DC Motor Drives
DC motor speed control using Switching Control or PWM
Voltage
Source
Vs
Vout
Diode
rectifier
%Dut y cycle =
Filter
capacitor
Full-bridge
DC-DC
converter
P ulse Widt h
x 100PWM
Cycle
Pluse-width-modulation
Vout = % Duty cycle x Vs
M
Power Electronic converter
H-bridge converters circuit
Vcc
A
ON
G
Q1
D1
D3
Q3
G
D2
Q2
G
OFF
B
ON
D
M
C
OFF
G
Q4
D4