Insegnamenti di
Sistemi Elettronici Dedicati 1
(Corso di Laurea in Ingegneria Elettronica)
Sistemi Elettronici Digitali1
(Corso di Laurea Specialistica in Ingegneria delle Telecomunicaizoni)
Introduzione ai
Dispositivi FPGA
Edizione 2004
Rodolfo Zunino
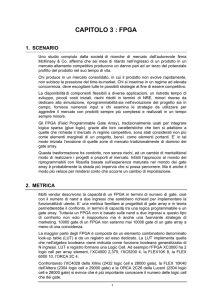
FPGA (Field Programmable Gate Array)
I dispositivi FPGA sono circuiti integrati contenenti molte celle logiche identiche, che
possono essere viste come delle singole porte logiche. Ogni cella può indipendentemente prendere
possesso di una funzione specifica, definita da una tabella e può comunicare con le altre celle
tramite una fittissima trama di interconnessioni e di interruttori. Questa matrice di celle e di
connessioni forma la base per la costruzione di ogni circuito, anche di quelli più complessi, grazie
alla grande varietà di funzioni possibili e all'elevatissimo numero di connessioni.
Sono dispositivi programmabili direttamente dall’utente, costituiti da un array di componenti
logici, circondati da blocchi di I/O programmabili liberamente e collegabiti tra loro tramite
interconnessioni programmabili; costituiscono un’importante evoluzione nel mondo dei dispositivi
programmabili poichè hanno un’elevata potenza di calcolo e di connessione. Un aspetto molto
importante sono i collegamenti locali che attraversano il dispositivo e che sono condivisi da pochi
elementi logici, quindi la potenza utilizzata ed i ritardi che si generano sono contenuti. All’interno
di uno stesso dispositivo possono esserci differenti linee locali di lunghezza differente e questo
garantisce un’elevata flessibilità del sistema.
Field Programmable significa che la funzione dell'FPGA è definita dal programma dell'utente,
piuttosto che dalla disposizione, non modificabile, dei dispositivi che realizzano le funzioni logiche.
Questi dispositivi permettono di raggiungere livelli di integrazione molto spinti, mantenendo la
caratteristica di basso costo di produzione iniziale, tipico dei dispositivi programmabili.
2
I componenti FPGA si distinguono per il tipo di blocchi logici implementati all'interno del
chip e per il modo di programmarle; vengono usati in applicazioni che richiedono alte prestazioni,
dove sono necessari dei tempi di risposta brevi, in situazioni in cui sia necessario realizzare un data
path, nelle I/O intensive applications oppure nelle register intensive applications (ad esempio
possono essere utilizzate per realizzare un interfacciamento ad un bus PCI a 33MHz o a 66MHz,
oppure un controllore di una DRAM con ts=3ns e tco=6ns, o ancora per applicazioni collegate a reti
ETHERNET o reti ancora più prestanti come le reti ATM). Le MPGA (Mask Programmable Gate
Array) hanno le stesse funzionalità degli FPGA, ma sono programmabili dalla sola ditta costruttrice
attraverso le maschere tecnologiche e quindi non sono nè programmabili sul campo nè tantomeno
riprogrammabili; sono gate array in cui viene fatta una prima fase tecnologica a livello di ossido
sottile (TOX thin oxide), ma non vengono messe le metallizzazioni per realizzare le
interconnessioni. Queste ultime vengono aggiunte in un secondo tempo in seguito ad una richiesta
da parte dell'utente.
Le FPGA sono commercialmente anche conosciute come:
•
LCA (Logic Cell Array)
•
pASIC (programmable ASIC)
•
FLEX, APEX (Altera)
•
ACT (Actel)
•
ORCA (Lucent)
•
Virtex (Xilinx)
•
pASIC (QuickLogic)
Le FPGA sono particolarmente interessanti sotto alcuni punti di vista, poichè rappresentano:
•
il miglior compromesso tra flessibilità, prestazione e costo;
•
piattaforme per la realizzazione di sistemi completi, infatti possono essere sia definitivi sia
prototipi.
Sebbene abbiano prestazioni ridotte rispetto ad un ASIC (Application Specific Integrated
Circuit), hanno:
•
un costo e un tempo di produzione inferiori;
•
un costo per unità più basso per bassi volumi di produzione;
•
la particolarità di poter far riversare sullo stesso dispositivo le configurazioni che descrivono
applicazioni differenti; le descrizioni risiedono in ROM e, prima dell’uso, vengono caricate
in RAM oppure direttamente caricate in RAM durante l’esecuzione.
3
Un tradizionale approccio allo sviluppo di questi dispositivi prevede che la simulazione
comportamentale di un circuito venga svolta via software, purtroppo però la crescente complessità
dei dispositivi mette in evidenza due svantaggi di tale modus-operandi, infatti la verifica di porzioni
ridotte del dispositivo introduce problemi di verifica del funzionamento globale e riduce anche la
possibilità di rispettare le scadenze imposte dal time-to-market.
Le FPGA sono tipicamente inadatte per applicazioni puramente G.P. (General Purpose),
basati su microprocessori, o anche S.P. (Special Purpose), dominio degli ASIC, ma col tempo il
“gap” e la linea di confine presente tra FPGA, ASIC e µP si è assottigliata poichè si sono
ottimizzate alcune aree del sistema.
I. Tecnologie per programmare i dispositivi FPGA
Le interconnessioni tra le celle possono essere di due tipi:
•
Volatili: si mette una RAM in cui si scrive la configurazione;
•
Non Volatili: si mette o una EEPROM, o una FLASH, o si può cablare direttamente nel
FPGA le informazioni relative alle piste oppure si utilizza il metodo
dell’AntiFuse[O1] (PROM)
cioè si ha un circuito aperto fino al momento in
cui viene forzata la corrente.
Le tecnologie influenzano la scelta delle architetture per le interconnessioni e per il routing
che, a loro volta, influenzano l'architettura dei blocchi logici (se un certo tipo di tecnologia permette
di realizzare molte intercnnessioni la scelta del tipo di blocchi da utilizzare sarà orientata verso
blocchi piccoli e poco complessi). Per la realizzazione delle interconnessioni ci sono tre possibilità:
1.
Utilizzare delle "antifuse devices" che normalmente sono dei circuiti aperti, ma possono
diventare dei conduttori se viene fatta passare una corrente elevata tramite una opportuna
tensione. I dispositivi antifuse possono essere realizzati in due modi differenti:
a. dispositivo antifuse che utilizza silicio amorfo; Si crea una "via" conduttrice (R=5ohm)
nel silicio amorfo che normalmente è un isolante a causa degli ioni metallici che vi si
insinuano quando si applica per un tempo adeguato una tensione di 10-12V.
4
Questa tecnologia non è riprogrammabile, ma ha il vantaggio che permette di realizzare
dispositivi con matrici di interconnessioni ad alta densità, e questo consente di realizzare
blocchi logici semplici. Il limite alla densità raggiungibile con questa tecnologia è dato
dalla dimensione fisica minima che devono avere le linee di collegamento;
b. dispositivo antifuse che utilizza oxide-nitride-oxide
2. Programmare le interconnessioni tramite celle di SRAM: questa tecnologia mi permette di
riprogrammare sia le connessioni sia le funzionalità dei blocchi durante il funzionamento del
dispositivo, perchè la SRAM è omogenea con la normale attività del sistema.
La grande flessibilità consentita dall'utilizzo di SRAM si paga però in termini di area, perchè il
suo utilizzo comporta dimensioni superiori di almeno un ordine di grandezza rispetto ai
5
dispositivi antifuse; inoltre questo tipo di tecnologia presenta una resistenza di interconnessione
dell'ordine del KΩ.
Per realizzare interconnessioni programmabili attraverso delle SRAM si utilizzano
configurazioni di questo tipo:
Esistono altre configurazioni, più complesse, che permettono la creazione di collegamenti
estremamente flessibili come ad esempio:
Per ottenere il collegamento completo non sarebbe necessario programmare tutti i transistor, ma
in
questo
modo
non
ci
sarebbe
resistenza
minima
all'interconnessione.
Una RAM statica si può realizzare con 5 transistor in questo modo:
6
3. Interconnessioni basate sui transistor floating gate; si distinguono in EPROM (cancellabili con i
raggi ultravioletti) e EEPROM (cancellabili con la tensione, quindi hanno il pregio di essere
riprogrammabili direttamente sulla scheda). Esse sono riprogrammabili e non volatili, richiedono
un’area con dimensioni che stanno a metà strada tra le due tecnologie precedenti.
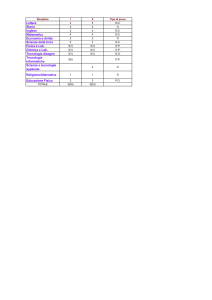
La seguente tabella riassume le caratteristiche delle tre tecniche considerate sopra:
Tecnologia
Volatilità Programmabilità
Area
R
(KΩ)
0.5-2
C
Extra
(pF)
steps
SRAM
Si
Si
Grande
10-20
0
Antifuse
No
No
Piccola
0.05-0.1 1.1-1.3
3
Antifuse ONO
No
No
Piccola
0.3-0.6
3
EPROM
No
Si
Media
2
10-20
3
EEPROM
No
2
10-20
>5
silicio amorfo
Si sul circuito
Il
doppio
5
dell’EPROM
Nota: per “extra steps” si intendono i passi aggiuntivi richiesti dalla tecnologia rispetto al processo
di produzione delle SRAM
7
Tecniche di programmazione dei dispositivi FPGA
Il linguaggio di programmazione utilizzato è il VHDL e di seguito viene riportato uno schema
semplificato di un tipico iter progettuale di dispositivo digitale basato su FPGA.
Le varie fasi di questo iter possono essere cosi’ sintetizzate:
Sintesi:
descrizione schematica del dispositivo, prende in ingresso una descrizione
comportamentale e dà in uscita una descrizione strutturale (rete logica);
Simulazione:
ricrea la rete, senza modificare nulla, ottimizza il tutto indipendentemente dalla
tecnologia che si utilizzerà in seguito;
Mapping:
conversione della lista dei componenti base in una lista di componenti logici.
Si ottimizza il circuito per ridurre o l’area da utilizzare o per aumentare le
prestazioni, quindi è un passo che dipende dalla tecnologia che si utilizza;
Simulazione
(fisico-elettrica del circuito, ad esempio con programmi di CAD quali SPICE);
8
Place & Route:
assegna le celle logiche ad una specifica locazione del FPGA e seleziona
segmenti di linee di connessione, li collega alle celle e configura la matrice degli
interruttori (se presente);
Simulazione/Emulazione: dipende dalla tecnologia e dal FPGA utilizzati.
Si inizia con la descrizione in HDL (può essere VHDL ma anche AHDL, Verilog o altro)
dell’FPGA; in commercio esistono diversi tool che aiutano a scrivere in HDL.
Un esempio di descrizione Vhdl è la seguente:
Successivamente si effettua la simulazione per verificare che le temporizzazioni siano
effettivamente quelle desiderate. Se ci sono ad esempio dei ritardi che possono provocare errori
allora si andrà a rivedere la descrizione in HDL.
9
Con la simulazione si visualizzeranno le uscite desiderate ed il loro andamento nel tempo, ad
esempio:
Se la simulazione è corretta si passa alla sintesi, la quale produce lo schema elettrico, es:
10
Nella sintesi i blocchi dell’FPGA sono generici, nella fase successiva di place & route invece le
risorse usate saranno reali:
Il place & route è un processo semi-automatico nel quale è possibile inserire diversi vincoli,
ad esempio che venga occupata la minore area possibile, oppure vincoli temporali tra due
connessioni, ecc; quindi per ottenere una simulazione corretta ci sono molti vincoli che devono
essere rispettati.
Non sempre il processo di place & route viene completato in automatico, a volte perché il
circuito è troppo complesso, a volte perché è proprio impossibile rispettare i vincoli.
In tali casi si può agire manualmente sulla matrice dei CLB o sulle risorse usate.
11
Cenni sul VHDL
Il VHDL è un linguaggio standard per la descrizione dell’hardware (Hardware Description
Language) , che può essere utilizzato per la documentazione, la simulazione e la sintesi di sistemi
digitali. Il VHDL è stato introdotto come linguaggio standard per la documentazione di sistemi
digitali complessi, è nato con lo scopo di fornire una descrizione non ambigua di un sistema
digitale, che potesse essere interpretata univocamente dai vari progettisti impegnati nello sviluppo
dello stesso sistema. Una delle caratteristiche del VHDL è quella di poter simulare il sistema
descritto, sia a livello funzionale sia tenendo conto dei ritardi del circuito; esso consente infatti di
descrivere efficacemente sistemi complessi cui corrispondono netlist di milioni di porte logiche
elementari, così come in un programma software ad alto livello è possibile ottenere facilmente
programmi in linguaggio macchina costituiti da milioni di istruzioni elementari a partire da un
listato di poche centinaia di righe. Un ulteriore vantaggio legato all’utilizzo di programmi di sintesi
è legato al fatto che la descrizione di un sistema digitale in VHDL può essere (quasi del tutto)
indipendente dalla particolare tecnologia scelta per l’implementazione del circuito, così come un
programma descritto in un linguaggio ad alto livello può essere compilato ed eseguito su
piattaforme hardware differenti.
Cenno alle differenze tra DSP e FPGA
DSP e FPGA coprono due fasce di mercato diverse; per applicazioni in cui è richiesta una
grande potenza di calcolo è sicuramente meglio l’utilizzo dei DSP (per via dell’architettura,
parallelismi vari, ecc…), mentre per gli FPGA è ancora la Glue-Logic a possedere la fetta di
mercato maggiore, sebbene non manchino esempi di applicazioni complete di controllo basate su
FPGA all-on-chip.
Un’altra importante differenza che allontana gli FPGA dal mondo dei DSP è la libertà di
configurazione dei PIN, quindi degli ingressi e delle uscite, i DSP infatti avevano una più rigida
configurazione della piedinatura. Il punto fondamentale quindi è che con un FPGA si ha una
maggiore flessibilità progettuale.
In un’applicazione in cui conviene l’utilizzo di un DSP, si inserisce spesso un FPGA
complementare, che possiede tutta la logica che non possiede il DSP, per sempio per generare
segnali si servizio (refresh per DRAM) o sincronismi verso i dispositivi di I/O.
12
Inoltre un FPGA costa molto di più di un DSP, infatti un DSP può costare poche decine di
dollari (5-10$ circa), mentre un FPGA economico può costare circa 100-150$.
III. Appendice: Esempi di FPGA commerciali
Fra i principali produttori di FPGA si annoverano Altera, Xilinx, ed ACTEL; dell’Altera
verranno considerati il MAX7000, il FLEX 8000, il FLEX10 e l’APEX20, mentre della Xilinx
verrà considerato l’XC4000.
Altera MAX7000
Nella figura sottostante viene riportato lo schema a blocchi di una MAX7000, dispositivo
EEPROM, dalle elevate prestazioni in termini di frequenza di funzionamento. Tale FPGA viene
realizzato in tre differenti versioni, con Core alimentato a 5, 3.3 o 2.5 volt. Ovviamente i dispositivi
a tensione minore sono quelli di ultima generazione, integrano perciò una tecnologia migliore che
permette di raggiungere il massimo delle frequenze operative. Come in quasi la totalità dei
dispositivi Altera, anche le MAX 7000 sono dotate di Multivolt I/O, ossia di un interfaccia che
permette di collegare logiche con tensione differente.
Particolare attenzione bisogna volgere al caso in cui si utilizzino FPGA con core a 3.3 v o 2.5
v. Per questi dispositivi la tensione massima di alimentazione dell’ interfaccia I/O è di 3.3 volt.
13
Nei ralativi datasheet però, viene dichiarata una compatibilità con le logiche a 5 volt;
ovviamente una porta di output, il cui buffer è alimentato a 3.3 volt non potrà mai arrivare a 5 volt;
il collegamento e’ possibile se il dispositivo a valle è conforme alle specifiche TTL 5V, per cui un
segnale maggiore di 2.4 V viene riconosciuto come livello alto.
Sebbene la figura di sopra riporti la struttura interna specifica di una MAX 7000 di Altera, si
può considerare tale schema significativo per capire come in generale sia fatto un FPGA; gli
elementi fondamentali sono:
•
Gruppi LAB (Logic Array Blocks) contenenti le macro-celle
•
Blocchi di connessione I/O
•
PIA (Programmable Interconnect Array)
•
Pin dedicati (GLCK1,GLCK2,OE1,OE2,GCLRn)
Un gruppo LAB, racchiude un certo numero di macro-celle, ossia i "nuclei" che realizzano le
strutture fondamentali del FPGA. Per capire a cosa servono tutti gli elementi visti nella struttura
generale bisogna analizzare la macro-cella nel dettaglio.
14
La parte combinatoria, della logica che si deve implementare, è svolta da una serie di porte
logiche predefinite, collegate in maniera opportuna, secondo le informazioni impartite dal
programma utilizzato per lo sviluppo del progetto. L’elemento che realizza fisicamente tali
connessioni è la Product Term Select Matrix. La cosa importante da osservare è che in questo
dispositivo, le funzioni logiche combinatorie sono realizzate effettivamente attraverso una struttura
logica cablata; negli FPGA RAM, le funzioni logiche combinatorie sono realizzate attraverso una
memoria, in cui gli indirizzi costituiscono gli ingressi della rete logica e le uscite i dati.
Questi due tipi di architetture hanno pregi e difetti facilmente intuibili; se da un lato
un’architettura micro-cablata permette di raggiungere prestazioni elevate in termini di tempi di
propagazione, d’altra parte l’integrazione che si riesce a raggiungere e’ notevolmente inferiore a
quella ottenibile attraverso una analoga struttura RAM. E’ comunque opportuno tenere a mente un
fatto sempre vero, ossia che confronti di questo tipo vanno fatti su logiche utilizzanti tecnologie
analoghe; ovviamente passando ad un processo costruttivo piu’ moderno si possono realizzare
logiche micro-programmate più veloci di quelle micro-cablate realizzate con una tecnologia di
cinque anni fa.
Qualora la macro-cella in questione non contenesse sufficienti elementi logici per
implementare al funzione combinatoria richiesta, è possibile utilizzare una macro-cella adiacente;
l’interconnessione avviene tramite i 16 Expander Product Terms. Notare che nel caso in cui questi
15
16 canali non bastassero, oppure le risorse interne al gruppo LAB fossero insufficienti, un ulteriore
espansione potrebbe avvenire unicamente attraverso il circuito a valle del registro, tramite una
nuova connessione con il PIA, con prestazione decisamente inferiori.
Come visibile da schema, se il registro presente in ogni macro-cella, risultasse non necessario
per la funzione che si deve realizzare, puo’ essere escluso attraverso un opportuno selettore. Altri
interruttori logici, permettono di selezionare da quale fonte prelevare segnali come il clock del
registro, il clear o il dato D. In particolare, è possibile connettere tali ingressi, ad un segnale
proveniente dalla parte combinatoria della macro-cella, oppure ad un ingresso dedicato; in
particolare, mentre il dato D puo’ essere collegato direttamente ad un pin di I/O, i segnali di clock e
clear possono essere assegnati ai rispettivi ingressi dedicati; per raggiungere le massime prestazioni
in termini di frequenza operativa, infatti, risulta indispensabile fare uso di questi I/O dedicati, in
particolare del Global Clock.
Altera FLEX8000, FLEX10K e APEX20k
Sono tutti dispositivi SRAM aventi la struttura di interconnessione chiamata FastTrack.
Questa modalità di interconnessione si realizza mediante dei fasci di fili raggruppati in righe o
colonne che attraversano il componente in tutta la sua dimensione. Esistono interconnessioni a tre
livelli tipiche delle famiglie FLEX8000 e FLEX10K, e interconnessioni a quattro livelli tipiche
della famiglia APEX20K.
Nelle strutture ad interconnessione a tre livelli i Logic Element sono organizzati in gruppi di
otto o dieci per formare un blocco denominato Logic Array Block (LAB). I LAB sono organizzati
in forma di matrice di righe e colonne e tra questi sono inseriti dei canali di routing sia orizzontali
che verticali che forniscono le necessarie connessioni. L’interconnettività all’interno di un LAB è
fornita da canali di interconnessione locali denominati LAB Local Interconnect. Il passaggio da
colonna a riga è compiuto mediante dei multiplexer programmati in fase di configurazione e
selezionati, in base al tipo di routing compiuto, mediante le celle static RAM della memoria di
configurazione.
Quando un LE di un LAB deve essere connesso a un LE di un qualsiasi altro LAB del
dispositivo il segnale viene immesso in un canale della colonna che lambisce il LAB, poi in un
canale della riga che serve il LAB destinatario e quindi raggiunge il LE mediante un canale del
Local Interconnect. I canali usati per questo collegamento appartenenti sia ad una riga che ad una
colonna, anche se in misura minore rispetto alla loro lunghezza totale, non possono più essere
utilizzati per un altro collegamento. Se il LAB destinatario appartiene alla stessa riga del sorgente è
16
possibile evitare il passaggio mediante colonna entrando direttamente nella riga. Se il LE sorgente
appartiene allo stesso LAB del LE destinatario allora è possibile evitare anche il passaggio della
riga per compiere direttamente la connessione mediante l’interconnessione interna del LAB.
Nella famiglia APEX20K sono previsti quattro livelli di interconnessione. Dieci Logic
Element sono raggruppati in un LAB e sedici LAB e un blocco embedded ESB (Embedded System
Block) sono raggruppati insieme per formare un MegaLAB.
L’ESB può essere una ram, una rom, una cam, un blocco di sedici macrocelle basate sulla
struttura a product term, xor e flip flop. L’interconnessione tra i LAB adiacenti è fornita dal Local
Interconnect in maniera simile a come avviene nella FLEX8000, mentre l’interconnessione
all’interno del MegaLAB è garantita dal MegaLAB Interconnect. All’interno del componente i
MegaLAB sono connessi mediante canali di routing costituiti da righe e colonne. Sia per le
interconnessioni a tre livelli che a quattro, alcuni blocchi di I/O sono direttamente connessi con i
canali verticali, altri con quelli orizzontali.
Di seguito sono riportati i diagrammi a blocchi dei rispettivi dispositivi.
FLEX8000:
17
FLEX10K:
APEX20K:
18
Xilinx XC4000
La serie XC4000 viene implementata con un’architettura di CLB regolare,flessibile e
programmabile, circondata da un perimetro di blocchi di I/O programmabili (IOB).
I CLB forniscono gli elementi funzionali per la costruzione della parte logica, mentre gli IOB
serviranno da interfaccia tra i pin del package e le linee dei segnali interni. I principali elementi
CLB sono mostrati nella figura seguente:
Sono presenti due generatori di funzione a 4 ingressi (F e G) le cui uscite possono essere
mandate all’ingresso di un terzo generatore di funzione a tre ingressi (H). Almeno un ingresso di H
sarà esterno al CLB. Ogni CLB contiene due elementi di memoria (Flip-Flop) che possono essere
usati per immagazzinare i risultati dei generatori di funzione.
L’XC4000 adotta una logica per la propagazione rapida del carry tra i CLB secondo questo schema:
19
Quando non sono presenti CLB in alto o in basso (quindi ai vertici di questo schema) il carry
viene propagato a destra. La figura seguente mostra lo schema di tale logica:
20
Per formare la somma i carry output sono combinati con gli operandi nei generatori di
funzione.
Per quanto riguarda gli IOB un diagramma a blocchi semplificato può essere il seguente:
L1 e L2 portano i segnali di ingresso nell’array e sono connessi ad un registro che può
funzionare da flip-flop o da latch. Gli ingressi L1 e L2 possono essere ritardati di diversi
nanosecondi prima di entrare nel registro, in modo da alzarne il tempo di set-up.
I segnali di uscita (out) possono passare direttamente al pad o essere immagazzinati nel flipflop.
Il segnale T serve a mettere in alta impedenza il buffer di uscita.
21
Le linee di connessione dei CLB sono illustrate nel seguente diagramma ad alto livello:
La seguente tabella mostra quante linee sono disponibili a seconda del loro tipo:
22
Il seguente diagramma invece rappresenta dettagliatamente il CLB con le relative linee di
connessione:
Gli ingressi e le uscite sono presenti su tutti e quattro i lati in modo da fornire la massima
flessibilità; in generale l’intera architettura è simmetrica e regolare.
Le linee orizzontali e verticali intersecano in un box chiamato PSM (Programmable Switch
Matrix).
Ogni matrice di interruttori consiste di pass transistor programmabili,usati per stabilire le
connessioni tra le linee (vedere figura 26 nella pagina precedente).
Le linee possono essere singole, doppie, quadruple (solo per l’XC4000X) e lunghe:
23
Le linee singole sono otto verticali e otto orizzontali per ogni CLB e sono usate nelle
connessioni tra le PSM dei CLB. Le linee doppie sono quattro verticali e quattro orizzontali per
ogni CLB e corrono attraverso due CLB prima di entrare in una PSM, sono lunghe il doppio delle
linee singole. Le linee quadruple sono dodici verticali e dodici orizzontali per ogni CLB, corrono
attraverso quattro CLB prima di entrare in una PSM e sono quattro volte più lunge delle linee
singole.
Le linee lunghe attraversano tutto l’array per lunghezza o per larghezza e sono usati per il
fan-out o per reti distribuite in lunghe distanze.
24