POLITECNICO DI MILANO
Scuola di Ingegneria Industriale e dell'Informazione
Corso di Laurea Magistrale in Ingegneria Elettrica
Analisi teorica e caratterizzazione sperimentale di contatti elettrici
per applicazioni nel settore ferroviario
Relatore: Alberto Dolara
Correlatore: Ing. Silvio Zuffetti
Tesi di Laurea
Pietro
Matr. 801289
Magistrale di:
Bertocchi
Anno Accademico 2013-2014
1
Indice
Indice delle figure................................................................................................pag 6
1.Introduzione.........................................................................................................pag 12
2.Resistenza di contatto..................................................................................pag 14
2.1 Introduzione.......................................................................................................pag 14
2.2 Teoria del contatto elettrico................................................................................pag 15
2.2.1 Teoria di Hertz.....................................................................................pag 19
2.2.2 Resistenza di film.................................................................................pag 25
2.2.3 Influenza dei rivestimenti....................................................................pag 26
2.2.4 Influenza della temperatura.................................................................pag 28
2.2.5 Effetto dei lubrificanti.........................................................................pag 30
2.3 Metodo per la predizione della resistenza di contatto........................................pag 35
2.4 Problematiche dei contatti elettrici.....................................................................pag 40
2.4.1 Usura....................................................................................................pag 40
2.4.2 Corrosione............................................................................................pag 41
2.4.3 Ossidazione..........................................................................................pag 43
2.4.4 Fretting.................................................................................................pag 46
2.4.5 Corrosione galvanica............................................................................pag 48
2.4.6 Rimbalzo del contatto..........................................................................pag 49
2.5 Materiali per i contatti elettrici...........................................................................pag 49
2
2.5.1 Materiali per i rivestimenti..................................................................pag 53
2.6 Forze di repulsione tra i contatti elettrici...........................................................pag 60
2.6.1 Electrodynamics Repulsion Between Electric Contacts with Arbitrary
Current-Density Distribution (Articolo)..........................................pag 66
3.Modello meccanico.......................................................................................pag 70
3.1 Modello analitico...............................................................................................pag 73
3.1.1 401840-Pinza a C................................................................................pag 73
3.1.2 00875-Sezionatore Romania...............................................................pag 77
3.1.3 343009-ETR-1000..............................................................................pag 80
3.1.4 S3........................................................................................................pag 84
3.2 Analisi FEM.......................................................................................................pag 86
3.2.1 401840-Pinza a C................................................................................pag 87
3.2.2 00875-Sezionatore Romania...............................................................pag 89
3.2.3 343009-ETR-1000..............................................................................pag 94
3.3 Conclusioni........................................................................................................pag 98
4.Valutazione della resistenza di contatto....................................pag 100
4.1 Conclusioni........................................................................................................pag 103
5.Modello termico e prova di tenuta.................................................pag 104
5.1 Modello..............................................................................................................pag 104
5.2 Risultati..............................................................................................................pag 107
6.Prova di Corto-circuito............................................................................pag 113
6.1 Modello analitico...............................................................................................pag 117
3
6.2 Analisi FEM........................................................................................................pag 120
6.2.1 Componente termica.............................................................................pag 120
6.2.2 Componenti elettromagnetica...............................................................pag 123
6.3 Risultati...............................................................................................................pag 125
7.I sezionatori nel ferroviario...................................................................pag 127
7.1 Alimentazione delle linee a corrente continua....................................................pag 127
7.2 Alimentazione delle linee in corrente alternata...................................................pag 135
7.3 Circuiti di trazione in C.C...................................................................................pag 139
7.4 Alimentazione bifrequenza..................................................................................pag 144
7.5 Mezzi di trazione con motore a collettore...........................................................pag 146
7.6 Mezzi di trazione con azionamento trifase..........................................................pag 148
8.Norme CEI.............................................................................................................pag 151
8.1 CEI EN 50124-1..................................................................................................pag 151
8.2 CEI EN 60077-1..................................................................................................pag 157
8.3 CEI EN 60077-2..................................................................................................pag 164
8.4 CEI EN 60060-1..................................................................................................pag 166
8.5 CEI EN 60865-1..................................................................................................pag 167
9.Conclusioni............................................................................................................pag 170
Allegato 1:Nota tecnica di SPII S.p.a, misura della resistenza di contatto....................pag 172
Allegato 2: Nota tecnica di SPII S.p.a. prova termica...................................................pag 198
Bibliografia....................................................................................................................pag 204
4
Ringraziamenti...........................................................................................................pag 206
5
Indice delle figure:
Figura 1: Superficie di contatto tra due superfici metalliche. ............................................................ 16
Figura 2: La tabella ci mostra la resistenza di costrizione in funzione del raggio degli a-Spots. ...... 17
Figura 3: Resistenza di costrizione in funzione della forma degli a-Spots. ....................................... 18
Figura 4: Confronti............................................................................................................................. 19
Figura 5: Contatto sfera-sfera. ........................................................................................................... 20
Figura 6: Contatto cilindro-cilindro. .................................................................................................. 20
Figura 7: Contatto cilindro-cilindro: Area di contatto. ...................................................................... 21
Figura 8: Proprietà meccaniche dei materiali. ................................................................................... 21
Figura 9: Pressione di contatto in funzione del raggio. ...................................................................... 22
Figura 10: Resistenza di contatto in funzione della forza di contatto. ............................................... 24
Figura 11: Forza di contatto utile nelle varie applicazioni................................................................. 25
Figura 12: Resistenza di contatto in funzione della forza di contatto. ............................................... 36
Figura 13: Contatto elettrico in 2-D. .................................................................................................. 36
Figura 14: Risultati dello studio FEM e caratteristiche meccaniche dei materiali usati. ................... 37
Figura 15: Area di contatto in funzione della forza di contatto applicata. ......................................... 38
Figura 16: Resistenza di contatto in funzione dell'area di contatto per diversi rivestimenti. ............ 38
Figura 17: Parametri usati nello studio. ............................................................................................. 39
Figura 18: Resistenza di contatto in funzione della forza di contatto per spessori diversi del
rivestimento. ....................................................................................................................................... 39
Figura 19: Resistenza di contatto in funzione della forza di contatto per diversi spessori del
rivestimento. ....................................................................................................................................... 40
Figura 20: Schema per lo studio dell'effetto della temperatura. ........................................................ 28
Figura 21: Caduta di tensione e sovratemperatura. ............................................................................ 30
Figura 22: Flusso di corrente per rivestimenti di diversa resistività. ................................................. 27
Figura 23: Spessore film sulla superficie del contatto in funzione del tempo: .................................. 45
Figura 24: Resistenza di contatto in funzione dello spessore del film. .............................................. 45
Figura 25: Il fenomeno del Fretting. .................................................................................................. 47
Figura 26: Resistenza di contatto in funzione dei cicli del contatto elettrico. ................................... 47
Figura 27 Resistenza di contatto in funzione dei cicli del contatto elettrico. .................................... 48
Figura 28: Resistenza di contatto in funzione dei cicli del contatto elettrico. ................................... 48
Figura 29: Rivestimento duro. ........................................................................................................... 54
Figura 30: Rivestimento duttile.......................................................................................................... 55
Figura 31: Proprietà fisiche dei materiali:.......................................................................................... 57
6
Figura 32: Resistenza di contatto prima e dopo l'ossidazione: .......................................................... 58
Figura 33: Resistenza di contatto in funzione dei cicli del contatto. ................................................. 58
Figura 34: Temperatura del contatto in funzione dei cicli del contatto. ............................................ 59
Figura 35: Caduta di tensione del contatto in funzione del tempo..................................................... 59
Figura 36: Percentuale di incremento della resistenza di contatto. .................................................... 59
Figura 37: Andamento dei fili di corrente all'interno del contatto. .................................................... 60
Figura 38: Andamento schematico dei fili di corrente. ...................................................................... 61
Figura 39: Esempio di contatto elettrico. ........................................................................................... 63
Figura 40: Geometria del contatto. .................................................................................................... 64
Figura 41: Geometria del contatto. .................................................................................................... 65
Figura 42: Apertura del contatto. ....................................................................................................... 66
Figura 43: Geometria del contatto in esame. ..................................................................................... 66
Figura 44:Foto pinze sezionatore di Zefiro MT ................................................................................. 70
Figura 45: Foto pinze sezionatore di Zefiro MT. ............................................................................... 71
Figura 46: Pinza 00875. ..................................................................................................................... 71
Figura 47: Pinze sezionatore di Zefiro. .............................................................................................. 72
Figura 48: Pinza del sezionatore dell'ETR-1000. .............................................................................. 72
Figura 49: Modello semplificato della pinza. .................................................................................... 74
Figura 50: Dati geometrici delle pinza sottoposta allo studio. ........................................................... 74
Figura 51: Suddivisione delle deformazioni sulle diverse parti della pinza. ..................................... 74
Figura 52: Modello più complesso della pinza sottoposta al nostro studio. ...................................... 75
Figura 53: Suddivisione delle deformazioni sulle diverse parti della pinza. ..................................... 75
Figura 54: Percentuale di deformazione sulle diverse parti della pinza. ........................................... 75
Figura 55: Percentuale di deformazione sulle diverse parti della pinza. ........................................... 76
Figura 56: Variazione del carico lineare sulla trave CD. ................................................................... 76
Figura 57: Modello semplificato della pinza. .................................................................................... 77
Figura 58: Dati geometrici delle pinza sottoposta allo studio. ........................................................... 77
Figura 59: Suddivisione delle deformazioni sulle diverse parti della pinza. ..................................... 77
Figura 60: Modello più complesso della pinza sottoposta al nostro studio. ...................................... 78
Figura 61: Suddivisione delle deformazioni sulle diverse parti della pinza. ..................................... 78
Figura 62: Percentuale di deformazione sulle diverse parti della pinza. ........................................... 78
Figura 63: Percentuale di deformazione sulle diverse parti della pinza. ........................................... 79
Figura 64: Variazione del carico lineare sulla trave CD. ................................................................... 79
Figura 65: Modello della pinza: ......................................................................................................... 80
7
Figura 66: Dati geometrici delle pinza sottoposta allo studio. ........................................................... 80
Figura 67: Suddivisione delle deformazioni sulle diverse parti della pinza. ..................................... 80
Figura 68: Percentuale di deformazione sulle diverse parti della pinza. ........................................... 81
Figura 69: Percentuale di deformazione sulle diverse parti della pinza. ........................................... 81
Figura 70: Teoria di Hertz .................................................................................................................. 81
Figura 71: Pressione di contatto calcolata tramite la teoria di Hertz. ................................................ 82
Figura 72: Andamento della forza. .................................................................................................... 83
Figura 73: Andamento della pressione di contatto............................................................................. 83
Figura 74: Foto pinza sezionatore S3:................................................................................................ 84
Figura 75: Modello semplificato pinza S3. ........................................................................................ 84
Figura 76: Caratteristiche geometriche della pinza e caratteristiche della molla. ............................. 85
Figura 77: Forza ottenuta dalla molla. ............................................................................................... 85
Figura 78: Pressione di contatto calcolata tramite i contatti Hertziani. ............................................. 85
Figura 79: Andamento della pressione di contatto............................................................................. 86
Figura 80: Condizione iniziale del sistema. ....................................................................................... 87
Figura 81: Sforzi sulla superficie della pinza ad inserzione completa. .............................................. 88
Figura 82: Andamento delle pressione nel volume. ........................................................................... 89
Figura 83: Andamento della pressione di contatto durante l'inserzione della lama. .......................... 89
Figura 84: Andamento della forza di inserzione durante l'ingresso della lama nel contatto. ............ 90
Figura 85: Condizione iniziale del sistema. ....................................................................................... 90
Figura 86: Sforzi sulla superficie della pinza ad inserzione completa. .............................................. 91
Figura 87: Andamento delle pressione nel volume. ........................................................................... 92
Figura 88: Andamento della forza di inserzione durante l'ingresso della lama nel contatto. ............ 92
Figura 89: Andamento della pressione di contatto durante l'ingresso della lama nel contatto su una
singola lamella. .................................................................................................................................. 93
Figura 90: Andamento della pressione di contatto durante l'ingresso della lama nel contatto. ......... 93
Figura 91: Condizione iniziale del sistema. ....................................................................................... 94
Figura 92: Sforzi sulla superficie della pinza ad inserzione completa. .............................................. 95
Figura 93: Andamento delle pressione nel volume. ........................................................................... 95
Figura 94: Andamento della forza di inserzione. ............................................................................... 96
Figura 95: Andamento della pressione di contatto durante l'ingresso della lama nel contatto su una
singola lamella. .................................................................................................................................. 97
Figura 96: Andamento della pressione di contatto durante l'ingresso della lama nel contatto. ......... 97
Figura 97: Resistenza di contatto per i diversi materiali, calcolata e misurata sperimentalmente. . 100
8
Figura 98: Resistenza di contatto in funzione della forza di contatto. ............................................. 100
Figura 99: Andamento della resistenza di contatto in funzione della forza di contatto per una pinza
in rame e lama in argento. ................................................................................................................ 100
Figura 100: Resistenza di contatto calcolata e misurata sperimentalmente. .................................... 101
Figura 101: Resistenza di contatto in funzione della forza di contatto. ........................................... 101
Figura 102: Andamento della resistenza di contatto in funzione della forza di contatto. ................ 101
Figura 103: Resistenza di contatto calcolata e misurata sperimentalmente. .................................... 101
Figura 104: Resistenza di contatto in funzione della forza di contatto. ........................................... 101
Figura 105: Andamento della forza di contatto in funzione della resistenza di contatto. ................ 102
Figura 106: Resistenza di contatto calcolata e resistenza di contatto misurata. .............................. 102
Figura 107: Resistenza di contatto in funzione della forza di contatto applicata. ........................... 102
Figura 108: Andamento della resistenza di contatto in funzione della forza di contatto applicata. 102
Figura 109: Andamento della pressione di contatto nel caso di pinza con spessore pari a 4 mm. .. 101
Figura 110: Pinze e lame soggette al nostro studio ( Sezionatore di Zefiro MT). ........................... 104
Figura 111: Modello usato in Comsol.............................................................................................. 106
Figura 112: Gradino di corrente in ingresso. ................................................................................... 107
Figura 113: Temperatura pinza sopra. ............................................................................................. 108
Figura 114: Temperatura pinza sotto. .............................................................................................. 108
Figura 115: Temperatura Lama........................................................................................................ 109
Figura 116 Tempertura piastra sopra ............................................................................................... 109
Figura 117: Gradino di corrente in ingresso. ................................................................................... 110
Figura 118: Tempertura Pinza sopra. ............................................................................................... 110
Figura 119: Tempertura Pinza Sotto. ............................................................................................... 111
Figura 120: Temperatura Lama........................................................................................................ 111
Figura 121: Tempertura Piastra sopra. ............................................................................................. 112
Figura 122: Immagine 3D del Sezionatore di Zefiro MT (Inventor). .............................................. 114
Figura 123: Particolare del Sezionatore di Zefiro MT, lama e pinze ed albero. .............................. 114
Figura 124: Sezionatore di Zefiro MT soggetto al nostro studio. .................................................... 115
Figura 125: Modello usato in Comsol.............................................................................................. 115
Figura 126: Mesh usata per il contatto elettrico. .............................................................................. 116
Figura 127: Mesh usata per simulare il comportamento dell'aria. ................................................... 117
Figura 128: Schema semplificato di una delle pinze del Sezionatore di Zefiro MT. ...................... 118
Figura 129: Dati geometrici della pinza. .......................................................................................... 118
Figura 130: Distanza tra i vari filetti di corrente. ............................................................................. 118
9
Figura 131: Forze in gioco su una della dita della pinza ................................................................. 119
Figura 132: Valori delle singole forze e della risultante. ................................................................. 119
Figura 133: Forze in gioco su una delle dita della pinza. ................................................................ 120
Figura 134: Valori delle singole forze e della risultante. ................................................................. 120
Figura 135: Gradino di corrente in ingresso. ................................................................................... 121
Figura 136: Temperatura Pinza sopra. ............................................................................................. 121
Figura 137: Temperatura Pinza sotto. .............................................................................................. 122
Figura 138: Temperatura Lama........................................................................................................ 122
Figura 139: Temperatura Piastra sopra. ........................................................................................... 123
Figura 140: Sfera per la simulazione dell'aria circostante il sezionatore. ........................................ 124
Figura 141: Forza agente sulla pinza sopra. ..................................................................................... 125
Figura 142: Forza agente sulla pinza sotto....................................................................................... 125
Figura 143: Schema elettrico di una SSE......................................................................................... 128
Figura 144: Connessione tra linee primarie ed SSE ........................................................................ 130
Figura 145: Collegamento in cascata ............................................................................................... 131
Figura 146: Ridondanze ................................................................................................................... 132
Figura 147: Ridondanza della linea primaria ................................................................................... 132
Figura 148: Alimentazione della linea di contatto ........................................................................... 133
Figura 149: Distribuzione delle corrente nel sistema a 2x25 kV ..................................................... 135
Figura 150: Interconnessione sistema a 2x25 kV ............................................................................ 136
Figura 151: Punto di origine della catenaria .................................................................................... 137
Figura 152: Effettiva distribuzione delle correnti nel sistema a 2x25 kV ....................................... 138
Figura 153: Sistema 2x25 kV ac reale. ............................................................................................ 139
Figura 154: Schema elettrico di trazione con motore a collettore: M=monofase; C=c.c; TS=tiristore
per l'indebolimento di campo; DS=diodo di blocco; R=resistore di scarica; K=sezionatore c.c./c.a.;
X=alimentazione con motore 2. ....................................................................................................... 146
Figura 155: Schema elettrico di trazione di una locomotiva con azionamento trifase. ................... 148
Figura 156: ETR-500 in configurazione 25kVAC a 50 Hz ............................................................... 149
Figura 157: ETR-500 in configurazione 3 kVcc ............................................................................... 150
10
11
1.Introduzione:
Il seguente lavoro si propone di investigare e comprendere meglio le caratteristiche
dei contatti elettrici. Prima di tutto è necessario introdurre la teoria dei contatti
elettrici e quindi i primi studi sui contatti svolti da Ragnar Holm nella metà del 900.
R.Holm introdusse la prima definizione di contatti elettrico e diede una prima
spiegazione e verifica scientifica alla teoria della resistenza di contatto. Nei suoi studi
affronta ogni problematica del contatto elettrico, partendo appunto dalla formula di
definizione della resistenza di contatto.
Il primo capitolo tratta le problematiche del contatto elettrico dal punto di vista
teorico, si parte dalla trattazione di Holm della resistenza di contatto, alla resistenza
di contatto nel caso di rivestimento superficiali, fino alle problematiche dei contati
elettrici, come la corrosione, rimbalzo ecc. i materiali maggiormente utilizzati e le
forze elettrodinamiche in gioco durante un corto-circuito.
Il secondo capitolo tratta invece la parte meccanica riguardante i contatti elettrici,
vengono quindi analizzate diverse tipologie di contatto. Tramite un'analisi FEM delle
variabili meccaniche delle pinze in questione, si vogliono quindi ricavare gli sforzi a
cui è soggetta la pinza e la pressione di contatto della pinza.
Il terzo capitolo tratta invece la resistenza di contatto, una volta acquisiti i risultati si
vuole calcolare la resistenza di contatto delle varie pinze e confrontarla con i risultati
ottenuti dalle prove sperimentali di resistenza di contatto.
Il quarto capitolo tratta invece l'analisi termica di un particolare contatto elettrico,
cioè sui contatti del sezionatore di Zefiro MT, si sono effettuate alcune prove
sperimentali e l'analisi FEM del dispositivo per valutarne il comportamento in caso di
passaggio di corrente.
12
Il quinto capitolo vuole approfondire l'analisi del contatto elettrico in caso di corto
circuito, in questa parte vengono quindi considerate le forze elettrodinamiche in
gioco durante un corto circuito e inoltre viene considerata la componente termica.
Il sesto capitolo vuole trattare i circuiti di trazione sul treno in cui sono inseriti i
sezionatori, quindi si analizzano i diversi sistemi di trazione e i diversi sistemi di
alimentazione delle linee di contatto.
Il settimo capitolo tratta invece le norme riguardanti i dispositivi che devono essere
montati su materiale rotabile.
13
2.Resistenza di contatto:
2.1 Introduzione:
La teoria di base per lo studio delle connessione elettriche si basa sul fatto che tutte le
superfici, se esaminate con ingranditore non appaiono uguali alle superfici ideali,
questo è dovuto al fatto che tali superfici presentano delle imperfezioni. Queste
imperfezioni vengono definite con il termine rugosità. La rugosità superficiale di un
materiale dipende dalla struttura cristallina del materiale stesso e ne caratterizza le
caratteristiche meccaniche.
Una volta introdotto il concetto di rugosità è immediato capire che l'accoppiamento di
due superfici avrà contatto solo attraverso le asperità che sono realmente in contatto.
Tale contatto viene quindi a stabilirsi solo su un grande numero di microaree
superficiali chiamate a-spots.
Il termine contatto elettrico sta a significare una giunzione tra due conduttori in grado
di trasportare corrente. Il conduttore dal quale entra la corrente viene chiamato anodo,
l'altro catodo. Quando i contatti sono separati da uno strato di materiale isolante si
parla di contatto aperto, mentre nel caso in cui sia garantita la continuità del circuito
si parla di contatto chiuso.
La teoria del contatto elettrico rientra pesantemente in tutti quei dispositivi in cui vi è
la necessità di aprire o chiudere un qualsiasi circuito elettrico, da qui nasce quindi
l'esigenza di studiare le proprietà e le caratteristiche dei contatti, sia in condizioni di
normale funzionamento del circuito che in condizioni di guasto, e inoltre di valutare
quali siano i parametri principali che agiscono tra le due superfici metalliche in
contatto e che ne determinano il buono o il cattivo funzionamento.
Il contatto elettrico trova applicazione i tutti quei dispositivi atti a sezionare, aprire,
chiudere un qualsiasi circuito e che rientrano in tutti gli ambiti dell'ingegneria
elettrica.
14
La teoria esposta in questo capitolo ha validità generale per qualunque tipo di
applicazione, essa quindi non vuole entrare nel dettaglio di una particolare
applicazione ma ha lo scopo di approfondire le caratteristiche dei contatti ed
evidenziare le variabili in gioco.
2.2 Teoria del contatto elettrico:
Si considerino due cilindri C1 e C2, e si definiscano Aa1 e Aa2 le superfici a contatto
dei due cilindri, e si indichi con Aa la superficie apparente di contatto.
L'irregolarità delle superfici Aa1 e Aa2 farà in modo che l'area di contatto tra i due
cilindri sia una parte dell'area nominale di contatto Aa, definita Ac. Il flusso di
corrente scorre attraverso la sola superficie Ac, a questo fenomeno è associata una
resistenza definita come resistenza di costrizione. La resistenza di costrizione non
dipende solamente dalle dimensioni della superficie Ac e dalla forma di tale
superficie.
Se viene applicata una differenza di potenziale tra due punti a e b dei due cilindri,
quando la corrente scorre attraverso il contatto possiamo definire la resistenza totale
del contatto come:
Rab
Se
Uab
I
(2.2.1)
si considera un solo cilindro e si considera inoltre che l'intera area Aa sia
perfettamente conduttiva, (quindi
il flusso di corrente scorre rettilineo nella
superficie), possiamo definire la resistenza totale di questo contatto ideale, Rab0,
come nel caso precedente, ovvero applicando tra due punti a e b una differenza di
potenziale.
La resistenza di costrizione e la tensione di costrizione sono quindi definite come:
R Rab R0 ab
(2.2.2)
U RI
(2.2.3)
15
Nel caso di contatto pulito, senza nessun film sulla superficie, R è definita
semplicemente come resistenza di contatto. Nel caso fosse presente un film e i due
conduttori fossero costituiti da metalli diversi, la resistenza R sarebbe la somma della
resistenza di costrizione R1 del primo conduttore, dalla resistenza del secondo
conduttore R2 e dalla resistenza di film Rf:
R R1 R2 R f
(2.2.4)
dove:
R1
1
R2
na
2
na
(2.2.5)
a e n sono rispettivamente, la sezione ed il numero degli a-Spots.
Rf
Ac
(2.2.6)
Questa è nota come la teoria di Holm per il calcolo della resistenza di costrizione con
a-Spots di forma qualunque, se introducendo l'ipotesi per cui la forma degli a-Spots è
di tipo circolare è possibile semplificare le equazioni, il problema principale risiede
nel fatto che è difficile calcolare le dimensioni ed il numero degli a-Spots.
Figura 1: Superficie di contatto tra due superfici metalliche.
La resistenza di costrizione per un singolo a-Spots tra due conduttori di dimensione
semi-infinita, è data dalla seguente formula:
16
R
(2.2.7)
2d
dove ρ è la resistività del materiale mentre d è il diametro dell'asperità di contatto.
Considerando entrambi i conduttori si ottiene:
R
(2.2.8)
d
Inoltre se considerano che i due conduttori sono costituiti da materiali diversi, è
possibile riscrivere la formula nel seguente modo:
R
1 2
2d
(2.2.9)
In tabella Figura 2 è riportata la resistenza di costrizione per un contatto rame-rame in
funzione del raggio degli a-Spots:
Raggio a-Spots [µm]
Resistenza di costrizione [Ω]
0.01
0.88
0.1
8.8x10-2
1
8.8x10-3
10
8.8x10-4
Figura 2: La tabella ci mostra la resistenza di costrizione in funzione del raggio degli a-Spots.
La resistenza di costrizione in una delle asperità di forma circolare di raggio a e con
raggio del conduttore R può essere calcolata come soluzione di una equazione di
Laplace:
17
La resistenza di costrizione è una funzione del numero e delle dimensioni e dalla
forma degli a-Spots, in Figura 3 è riportato un confronto tra le varie tipologie di aSpots mantenendo costante l'area del contatto:
Forma
a- Raggi [µm]
Spots
Circolare
Lunghezza
Larghezza
Spessore
Resistenza
[µm]
[µm]
anello [µm]
[Ω]
1.55x10-3
5.64
Quadrata
10
10
3.04x10-3
Rettangolare
50
2
0.43 x10-3
Anello
16.41
1
0.71 x10-3
Figura 3: Resistenza di costrizione in funzione della forma degli a-Spots.
In un contatto elettrico il numero delle asperità in contatto dipende dal carico
meccanico applicato, è possibile che più asperità si uniscano tra loro per formare un
gruppo o cluster, è possibile arrivare ad una equazione che definisce in questo caso la
resistenza di costrizione, facendo riferimento ad una geometria circolare degli aSpots, come:
Rc
nd
D
(2.2.10)
Il raggio del cluster di diametro D è definito anche come raggio di Holm e viene
indicato con α. Si riportano in Figura 4 alcuni valori interessanti della formula,
facendo crescere progressivamente il raggio degli a-Spots:
Raggio a-Spots Resistenza
a- Raggio
di Resistenza del Raggio singolo
18
Spots
Holm
cluster
a-Spots
equivalente
resistenza
0.02
0.3289
5.34
0.0937
1.18
0.04
0.1645
5.36
0.0932
1.94
0.1
0.0685
5.42
0.0923
3.16
0.2
0.0329
5.50
0.0909
4.04
0.5
0.0132
5.68
0.0880
4.94
Figura 4: Confronti.
La reale area di contatto dipende dal carico meccanico applicato, la deformazione tra
le parti in contatto può essere sia plastica che elastica, questo dipende dalla pressione
di contatto, in questo si fa riferimento alla teoria di Hertz. Essendo l'area di contatto
reale inferiore a quella nominale, la deformazione sarà plastica in quanto essendo
presenti meno punti di contatto, dato che la reale area di contatto è inferiori a quella
nominale, la pressione di contatto sarà concentrata in questi punti rendendo la
deformazione plastica.
2.2.1 Teoria di Hertz:
Le tensioni che si generano grazie al contatto vengono descritte nella teoria di Hertz
formulata secondo le seguenti ipotesi:
1) Solidi elastici, omogenei, isotropi:
2) Superfici lisce:
3)Tensioni tangenziali di attrito nulle:
La teoria formulata da Hertz pone come obiettivo la valutazione della forma e della
dimensione dell'area di contatto e la quantificazione del valore della pressione nei
punti della medesima area, relativamente a solidi in campo elastico a contatto fra loro
e caricati lungo la normale.
19
Figura 5: Contatto sfera-sfera.
Figura 6: Contatto cilindro-cilindro.
20
Figura 7: Contatto cilindro-cilindro: Area di contatto.
Come riportato dal seguente articolo XIX XIX, tramite l'analisi FEM delle pressioni
sulla superficie di contatto si può valutare come la deformazione sia di tipo plastico:
Figura 8: Proprietà meccaniche dei materiali.
21
Figura 9: Pressione di contatto in funzione del raggio.
Le pressioni sulla superficie di contatto risultanti dell'esperimento sono maggiori
dello Yield Stress del materiale considerato, quando le pressioni superano lo Yield
Stress si verificano deformazioni plastiche sul materiale.
L'articolo mette in luce come la reale area di contatto sia legata al carico applicato F
all'interfaccia tra le due superfici e dalla durezza del materiale tramite la seguente
relazione:
F Ac H
(2.2.1.1)
La formula (2.2.1.1) ha validità, con buona approssimazione, nel caso di
deformazioni plastiche, una valutazione rigorosa di H è assai difficile. Da esperimenti
condotti: H può essere stimata dell'ordine di tre volte il limite di elasticità del
materiale. Se il contatto è formato da materiali diversi si deve considerare la durezza
più bassa tra i due materiali.
L'equazione mostra come la reale area di contatto tra due superfici sia indipendente
dall'area nominale di contatto delle superfici ma questa dipenda dalla forza di
contatto e dalla durezza dei materiali utilizzati, inoltre è indipendente dalle
dimensioni degli oggetti in contatto. L'origine fisica di tale equazione può essere
compresa facilmente tramite un semplice esempio:
Si considerino due interfacce costituite dallo stesso materiale ma con differenti
dimensioni, 1 cm2 e 10 cm2 soggette allo stesso carico meccanico F. Se i materiali
hanno la stessa rifinitura in superficie avranno la stessa densità di asperità in
22
superficie, questo significa che le zone di contatto dell'interfaccia più piccola saranno
date da n, numero di asperità, nel caso dell'interfaccia più grande le zone di contatto
saranno 10n. Il carico meccanico medio sviluppato ad ogni asperità sarà, per la
superficie piccola, pari a F/n e per quella grande sarà F/10n . Se la deformazione è
completamente plastica l'area di contatto ad ogni asperità della superficie piccola sarà
dieci volte maggiore in confronto alla superficie grande, ma la totale area di contatto
è identica nei due casi. L' equazione ha validità in caso di deformazione plastica dei
materiali.
E quindi possibile concludere che Ac=ηπα2, dove η è un coefficiente dell'ordine
dell'unità per interfacce pulite.
La resistenza elettrica di contatto può essere quindi definita tramite la seguente
equazione:
Rc
2 H
4F
(2.2.1.2)
L'equazione si ottiene combinando la formula che fornisce l'area di contatto e la
relazione tra l'area di contatto e carico meccanico applicato.
La relazione mostra come la resistenza di contatto diminuisca al crescere della forza
di contatto, questo avviene a causa di diversi fattori, i più importanti sono
principalmente tre:
1) Incrementare la forza di contatto significa aumentare il numero delle
asperità.
2) Incrementando la forza di contatto si procede verso un appiattimento
permanente delle asperità di contatti.
23
3) Si ha un indurimento delle asperità di contatto che riduce la resistenza di
costrizione associata ad ogni a-Spots.
Figura 10: Resistenza di contatto in funzione della forza di contatto.
Aumentando la forza normale di contatto si va da aumentare anche la forza di
inserzione:
Fi NF
(2.2.1.3)
µ: coefficiente di attrito.
N: numero di elementi in contatto.
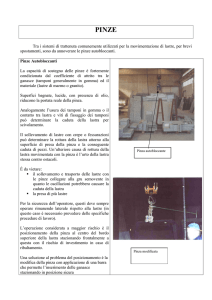
In tabella Figura 11: Forza di contatto utile nelle varie applicazioni. si riportano alcune
considerazioni utili che arrivano dalla pratica e che determinano i materiali da
utilizzare nelle varie applicazioni in base alla forza di contato che si vuole ottenere:
24
Figura 11: Forza di contatto utile nelle varie applicazioni.
2.2.2 Resistenza di film:
La resistenza di film tiene conto di quel contributo alla resistenza di contatto dovuta
alla presenza di strati contaminanti sulla superficie di contatto, questi possono essere
strati di ossido, lubrificanti, acqua o anche prodotti di corrosione, che avendo una
resistività elevata limitano la conduzione e quindi il passaggio della corrente.
Questi strati, se di spessore limitato inferiore a 10 -10 m, sono in grado di condurre
grazie all'effetto tunnel. Nella meccanica classica la legge di conservazione
dell'energia impone che una particella non possa superare un ostacolo se non possiede
l'energia per farlo. La meccanica quantistica invece prevede che una particella abbia
un probabilità, anche se molto piccola, di riuscire ad attraversare una barriera. La
resistività dovuta all'effetto tunnel è indipendente dalla composizione del film.
25
Indicando con ρf la resistività dello strato contaminato, con s lo spessore dello strato
contaminato e con ∑a la sommatoria delle aree occupate dallo strato effettivamente in
contatto, è possibile scrivere:
Rf
f s
a
(2.2.2.1)
Supponendo che lo strato sia uniformemente distribuito sulla superficie di contatto,
cioè che ∑a=A, è possibile riscrivere la formula in questo modo:
Rf
f sH
F
(2.2.2.2)
dove H è la durezza dello strato contaminato.
2.2.3 Influenza dei rivestimenti:
I rivestimenti elettrici conduttivi sono spesso utilizzati per ridurre la resistenza
elettrica di contatto. La resistenza di contatto può essere ridotta grazie ad alcune
azioni, come per esempio una diminuzione della durezza superficiale del contatto,
l'eliminazione dei film di ossido presenti sulla superficie del contatto. I rivestimenti
sono inoltre utilizzati per proteggere la superficie del contatto elettrico dalla
corrosione, ossidazione e per aumentare la resistenza meccanica.
Nelle condizioni in cui la resistività del materiale usato per il rivestimento sia
maggiore della resistività del materiale usato per il sottostrato e che il raggio degli aSpots sia dello stesso ordine di grandezza dello spessore del film, il flusso di corrente
elettrica si diffonde più significativamente nel sottostrato che non nel rivestimento
In questo caso la resistenza di diffusione può essere approssimata con l'equazione:
Rd
4a
(2.2.3.1)
dove ρ è al resistività del materiale usato per il sottostrato.
26
Considerando anche lo strato di film che è presente sulla superficie del contatto, con
area πa2 e spessore s e resistività ρf , è presente una resistenza addizionale data da:
fs
a2
(2.2.3.2)
In prima approssimazione, la totale resistenza può essere approssimata con:
Rt Rd
f s
a2
(2.2.3.3)
Nelle condizioni in cui la resistività del materiale usato per il rivestimento sia più
piccola della resistività del materiale usato per il sottostrato, il flusso di corrente si
diffonde più apprezzabilmente nel materiale del rivestimento che non nel sottostrato.
Figura 12: Flusso di corrente per rivestimenti di diversa resistività.
In questo caso la resistenza di diffusione decresce con l'aumentare dello strato del
rivestimento.
Si definisce Plating Factor:
Pf s / a, , f
eff / 4a eff
4a
(2.2.3.4)
Il Plating Factor è funzione di F, dato che è funzione degli a-Spots:
27
ρeff= resistività del rivestimento.
Partendo dell'espressione della resistenza di costrizione 2.2.1.2, si definisce la
resistenza totale nel caso in cui il contatto fosse dotato di un rivestimento:
p Pf H
R
2
4F
(2.2.3.5)
H= durezza del materiale meno duro.
Considerando l'effetto della resistenza di costrizione, del rivestimento del contatto e
del film presente sulla superficie di contatto, si definisce una totale resistenza di
contatto data dall'equazione:
Pf H cont scont H
R p
2
F
4F
(2.2.3.6)
2.2.4 Influenza della temperatura:
Nella espressione della resistenza di contatto trovata in precedenza compare la
resistività ρ del materiale. La resistività è funzione della temperatura, per valutare la
sovratemperatura massima ϴ raggiunta dal contatti si fa riferimento al modello in
figura:
Figura 13: Schema per lo studio dell'effetto della temperatura.
dove l'area di passaggio è costituita da una sfera e i due elementi di contatto sono
cilindrici, le linee di flusso della corrente sono radiali, mentre le superfici
28
equipotenziali sono superfici semisferiche. Data questa struttura si considera il flusso
di calore come percorrente gli stessi tubi di flusso della corrente. Si definisce la
seguente resistenza termica, con R si intende la resistenza di costrizione e C t la
conduttività termica del materiale:
(2.2.4.1)
Poiché il flusso di calore è dato da RI2, la differenza di temperatura media è data da:
(2.2.4.2)
La sommatoria di tutte le differenze di temperatura elementari fornsice la
sovratemperatura ϴ nella zona di passaggio della corrente:
(2.2.4.3)
in cui V rappresenta la tensione ai capi degli elementi in contatto, indicando questa
caduta di tensione con U, possiamo scrivere:
(2.2.4.4)
Valuta la sovratemperatura ϴ, si esprime il coefficiente da applicare alla resistività
del materiale per effetto del riscaldamento dovuto alla corrente, che con buona
approssimazione è dato dalla seguente formula:
(2.2.4.5)
29
dove α è il normale coefficiente di temperatura del materiale considerato rispetto ad
una temperatura di riferimento. Si riporta di seguito in Figura 14 una tabella che
fornisce la corrispondenza fra la caduta di tensione del contatto in rame U, la
sovratemperatura ϴ e il coefficiente di temperatura α' (temperatura di riferimento 19
°C):
Figura 14: Caduta di tensione e sovratemperatura.
L'espressione data per ϴ mostra che, durante la separazione degli elementi di
contatto, si raggiunge facilmente la temperatura di fusione e anche di ebollizione dei
contatti, a causa del progressivo aumento della resistenza di contatto.
2.2.5 Effetto dei lubrificanti:
E' pratica comune l'uso di lubrificanti tra le due interfacce di un contatto elettrico,
questo sia per favorire il passaggio di corrente che per limitare i danni causati dalle
continue manovre meccaniche a cui è sottoposto il contatto.
Nei contatti elettrici in presenza di rivestimenti in ambienti polverosi, molti
esperimenti hanno mostrato come i lubrificanti liquidi siano migliori dei lubrificanti
in cera. Vari esperimenti hanno mostrato come la permettività del lubrificanti giochi
un ruolo molto importante nell'attrazione della polvere. La mistura di polvere e cera
sulla superficie di contatto può essere molto dannosa per il contatto specialmente in
caso di bassa forza di contatto.
Quando si ha la presenza di polvere sulla superficie di contatto questa può portare al
fallimento del contatto, la polvere può essere rimossa dopo alcuni cicli di contatto.
30
Figura 15: I grafici riportano l'andamento della resistenza di contatto in funzione delle manovre del dispositvo
31
Figura 16: Caratteristiche di alcuni lubrificanti
In generale, la resistenza di contatto in presenza di un lubrificante a cera è maggiore
che in presenza di un lubrificante liquido in presenza di basse forze normali di
contatto.
-Per quanto riguarda i lubrificanti a cera, maggiore è la corrente che passa attraverso
il contatto minore e la resistenza di contatto associata.
-Per quanto riguarda i lubrificanti liquidi la tendenza sembra essere quella opposta,
cioè la resistenza di contatto sale con la corrente.
Si nota che lubrificanti con maggiore permettività portano ad avere una resistenza di
contatto maggiore, in generale si nota anche che i lubrificanti in cera hanno un
comportamento peggiore dei lubrificanti liquidi.
Un lubrificante con una elevata permettività crea una forza di attrazione sulla polvere
molto più elevata che un lubrificante con bassa permettività, conseguentemente il
numero di particelle attratte e depositate sulla superficie di contatto è maggiore in
confronto ad un lubrificante con permettività minore.
32
Lubrificanti a cera:
Essendo il contatto formato da molte asperità, anche se ad ogni ciclo esiste una
pulizia del contatto, un po' di polvere può rimanere tra due asperità, il misto di
lubrificante e polvere può essere dannoso per il contatto.
L'alta permettività del lubrificante fornisce una forza di adesione maggiore che un
lubrificante con bassa permettività questa è la ragione del cattivo comportamento dei
lubrificanti a cera specialmente in caso di basse forze normali di contatto.
Lubrificanti liquidi:
I lubrificanti con maggiore permettività attraggono più polvere che i lubrificanti con
minore permettività, ma allo stesso tempo la mobilità della superficie rimuove la
polvere ed elimina il problema ed i suoi effetti.
Se la corrente scorre attraverso un contatto con alta resistenza si ha un aumento della
temperatura sulla superficie di contatto, la permettività si riduce con l'aumento della
temperatura e questo è importante perché riduce la forza di adesione e quindi riduce
la resistenza di contatto.
Figura 17: Permettività in funzione della tempertura.
Per i lubrificanti liquidi la permettività si riduce con l'aumento della temperatura
questo comporta una diminuzione della mobilità sulla superficie e questo comporta
33
un aumento della resistenza di contatto specialmente in caso di basse forze normali di
contatto. In caso di elevate forze di contatto l'azione della pressione è talmente
elevata che spinge il lubrificante e tutta la polvere via dal contatto e mantiene bassa la
resistenza di contatto.
Per concludere affinché l'uso dei lubrificanti abbia successo:
-Non è conveniente utilizzare un lubrificante a cera in ambiente polveroso,
specialmente in caso di elevata permettività.
-In caso di lubrificante liquido la rugosità della superficie di contatto è molto
importante, è conveniente avere una superficie piuttosto piatta così che ad ogni ciclo
il contatto si pulisca da solo.
-Lubrificanti liquidi con permettività media risultano essere i migliori perché hanno
una buona mobilità e non attraggono tanta polvere.
-Nonostante si ritenga il contrario i lubrificanti migliori sono degli isolanti, questi
hanno un effetto benefico sul contatto elettrico e ne migliorano le performance. Nella
formula della resistenza di contatto è vero che la resistività sta al numeratore, quindi
ad un aumento della resistività aumenta la resistenza di contatto, ma in proporzione
minore rispetto all'effetto che viene descritto in seguito. In un contatto elettrico il
flusso di corrente scorre attraverso gli a-Spots e non negli spazi tra le asperità, quindi
la resistività del grasso lubrificante incide nella realtà molto poco sulla resistenza di
contatto.
Quando il contatto viene chiuso le reali parti in contatto sono gli a-Spots, il grasso
isolante va a depositarsi negli spazi vuoti compresi tra i vari a-Spots a causa della
forza di contatto meccanico, quindi garantisce un contatto metallo-metallo e questo fa
diminuire la resistenza di contatto.
34
Inoltre l'uso di un grasso lubrificante rende più difficile il formarsi di depositi di
ossido sulla superficie del contatto, che farebbero aumentare la forza di contatto per
ottenere la stessa resistenza di contatto.
L'uso di lubrificanti ha uno scopo sia elettrico che meccanico in quanto mantiene la
resistenza di contatto costante nel tempo ed diminuisce l'usura del dispositivo.
Per la scelta di un tipo di lubrificante devono essere considerati diverse caratteristiche
del nostro contatto:
- Riduzione della forza di inserzione:
- Riduzione dell'effetto fretting:
- Aumento della vita del dispositivo:
2.3 Metodo per la predizione della resistenza di contatto:
Il calcolo della resistenza di contatto non è banale, questo è dovuto al fatto che
entrano in gioco diverse variabili che non sono facilmente calcolabili, come per
esempio la pressione agente sulla superficie di contatto, il legame tra forza di contatto
e reale area di contatto.
Esistono diversi metodi sperimentali per la valutazione della resistenza di contatto, si
riporta l'esperimento XIX condotto da Sawada e Shimizu. Tra i vari metodi in
letteratura si è scelto questo perchè vengono introdotti i rivestimenti dei contatti
elettrici e quindi la valutazione della resistenza di contatto in caso di rivestimenti.
La prova è stata effettuata con diversi campioni, i primi due rivestiti con argento e
stagno e il terzo non rivestito. La massima forza di contatto è stata fissata a 40 N.
I campioni hanno una forma emisferica con spessore da 1 a 10 mm.
I risultati dell'esperimento con campioni con rivestimento 6 µm di argento e 5 µm di
stagno sono riportati in figura, si nota come la resistenza di contatto sia minore in
35
presenza di carico maggiore e come la resistenza di contatto del campione con il
rivestimento argentato sia minore di quella con il rivestimento di stagno.
Figura 18: Resistenza di contatto in funzione della forza di contatto.
Per arrivare a definire la relazione tra la forza di contatto e l'area di contatto gli autori
hanno deciso di calcolare, tramite l'analisi FEM del contatto, le pressioni che entrano
in gioco, nello studio non viene considerata la rugosità della superficie. Lo studio
FEM è stato effettuato in 2-D.
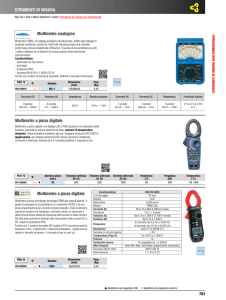
Si riportano in Figura 20 i risultati dello studio FEM e le caratteristiche dei materiali.
Figura 19: Contatto elettrico in 2-D.
36
Figura 20: Risultati dello studio FEM e caratteristiche meccaniche dei materiali usati.
La pressione di contatto in superficie è maggiore dello Yield Stress e questo dimostra
come la deformazione è di tipo plastico.
La relazione tra forza di contatto e area apparente di contatto può essere approssimata
come:
S Fn
(2.3.1)
S è l'area di contatto apparente [mm2]:
F è la forza di contatto [N]:
α è una costante [mm2/N]:
n è una costante:
37
Figura 21: Area di contatto in funzione della forza di contatto applicata.
La resistenza di costrizione varia con il rivestimento e lo spessore del rivestimento.
Figura 22: Resistenza di contatto in funzione dell'area di contatto per diversi rivestimenti.
E' possibile approssimare la relazione tra resistenza di contatto e area con questa
equazione:
Rk S m
(2.3.2)
S è l'area di contatto apparente:
β è una costante:
m è una costante:
38
Figura 23: Parametri usati nello studio.
Per arrivare a definire in anticipo la resistenza di contatto si può procedere in questo
modo:
Partendo dalla relazione 2.3.1 e passando attraverso la relazione 2.3.2:
Si ottiene:
Rk m F nm
(2.3.3)
-Silver:
Figura 24: Resistenza di contatto in funzione della forza di contatto per spessori diversi del rivestimento.
39
Tin:
Figura 25: Resistenza di contatto in funzione della forza di contatto per diversi spessori del rivestimento.
Si nota come per valori di forza di contatto elevati si verifichi il fenomeno di
adesione in tutta l'intera area di contatto, considerato questo è possibile affermare che
l'area di contatto apparente è effettivamente equivalente alla reale area di contatto
quando viene calcolata la resistenza di costrizione per forze di contatto elevate.
2.4 Problematiche dei contatti elettrici:
2.4.1 Usura:
Il fenomeno dell'usura è legata ai rivestimenti, il termine usura indica la rimozione
forzata del materiale di contatto quando sono presenti delle azioni di strisciamento,
esistono due tipologie di usura:
-Usura abrasiva:
Avviene quando un materiale è più duro del'altro.
-Usura adesiva:
40
La parte più debole aderisce a quella più forte e viene portata via, questo meccanismo
dipende dalla forza di contatto, maggiore è la forza di contatto maggiore è la
possibilità che avvenga questo fenomeno.
Tutti i i tipi di usura vengono descritti dell'equazione di Archard in cui si definisce V
come il volume dei frammenti di usura, k il coefficiente di usura, F è il carico
applicato, L lunghezza del movimento durante l'usura:
V
kFL
H
(2.4.1.1)
k dipende dalla forza di contatto, dalla durezza e dalla geometria del contatto, dalla
rugosità della superficie e, dallo stato di lubrificazione del contatto.
2.4.2 Corrosione:
La corrosione dei contatti elettrici è un fenomeno molto complesso, in cui risiedono
molte variabili. Le principali cause del fenomeno possono essere riassunte come
segue:
Umidità relativa:
Reazioni al cloro:
Ossidazioni:
Temperatura:
Reduced sulfides (H2S):
L'umidità è un fattore molto importante nei processi di corrosione, inoltre deve essere
considerato anche l'inquinamento come fattore che accresce la corrosione del contato
elettrico. Ambienti particolarmente inquinati favoriscono la corrosione del contatto.
La corrosione è un fenomeno che avviene in quei contatti che usano come
rivestimento uno dei metalli nobili. Un metallo nobile è un metallo che non avvia
alcun processo di corrosione. Il problema dei contatti che utilizzano come
41
rivestimento uno dei metalli nobili non risiede nel fatto che il metallo nobile favorisca
un processo di corrosione, ma risiede nella lega metallica di base che viene utilizzata
nel contatto elettrico. La lega metallica di base deve garantire le caratteristiche
necessarie del contatto, se per esempio è una lega del tipo rame-zinco (ottone ), lo
zinco reagisce con l'ossigeno, zolfo e cloro che sono elementi spesso presenti in
ambiente.
Oro:
Il problema principale risiede nel costo dell'oro, se si potessero fare contatti con
spessori di oro maggiore il problema della corrosione sarebbe risolto, l'elevato costo
però limita lo spessore di oro che si può ragionevolmente utilizzare. Il rivestimento in
oro è solo sull'interfaccia del contatto e non sull'intero terminale.
Un metodo per risolvere il problema della corrosione consiste nell'inserire uno strato
di nichel tra il rivestimento in oro e la lega rame-zinco. Se non fosse presente lo strato
di nichel qualsiasi imperfezione nel rivestimento in oro provocherebbe l'esposizione
della lega rame-zinco e quindi si avrebbe il fenomeno della corrosione. I prodotti
derivanti dalla corrosione aumentano la resistenza di contatto. Lo strato di nichel
impedisce ai prodotti della corrosione di arrivare alla superficie di contatto.
Argento:
Le stesse considerazioni possono essere fatte per l'argento, infatti il film superficiale
in un contatto argentato ha un effetto molto più deleterio che per esempio su un
contatto in nichel.
L'argento è uno dei materiali più utilizzati nei contatti elettrici, oltre ad essere un
ottimo conduttore presenta la qualità di non formare ossidi a temperatura ambiente, al
contrario di altri materiali quali nichel e rame. L'argento ha il difetto di reagire
principalmente con il cloro che è un elemento che si trova facilmente nell'ambiente,
questo crea uno strato di sporco sulla superficie del contatto
42
Il comportamento dell'argento dipende quindi dal tasso di formazione del film di
sporco sulla superficie e dalla forza impressa dal contatto, il film creato dall'argento
non ha elevate caratteristiche di durezza e quindi elevate forze di contatto possono
rompere il film e mantenere il valore di resistenza di contatto costante.
Rame:
Il rame non viene mai utilizzato direttamente sulla superficie di contatto, a parte in
caso di elevate forze di contatto. Le reazione del rame sono strettamente dipendenti
dalle interazioni con l'umidità e il livello di inquinamento.
Nichel:
Il nichel è uno dei materiali usati maggiormente nei contatti elettrici, il nichel è usato
come barriera per la corrosione se utilizzato in condizioni ambientali tipiche dei climi
temperati, bisogna in generale porre particolare attenzione perché potrebbero
presentarsi condizioni per cui il nichel potrebbe portare alcuni svantaggi invece che
un miglioramento nel contatto, per esempio in climi più aggressivi.
Stagno:
Per quanto riguarda lo stagno è appropriato considerarlo un materiale importante. Può
essere usato sia come metallo di base che come rivestimento. Studi dimostrano come
la formazione di ossido dello stagno in tutti gli ambienti è accettabile, quindi è
utilizzabile anche in ambienti con climi aggressivi.
2.4.3 Ossidazione:
Il processo di ossidazione di un contatto metallo-metallo è considerato uno dei
meccanismi di degradazione più influente nei contatti elettrici. Il processo di
ossidazione del contatto dipende dal materiale usato, ogni materiale ha un suo
particolare comportamento in caso di ossidazione, di seguito si riportano le
caratteristiche dei principali materiali usati nei contatti elettrici.
43
Rame:
Nel caso di un contatto in rame è stato dimostrato che in presenza di ossigeno
nell'atmosfera si ha sempre la presenza di questo fenomeno che porta ad una rapida
crescita della resistenza di contatto. L'ossido di rame garantisce comunque una certa
conduttività.
L'ossido di rame è tenero, questo è importante perché con elevate forze di contatto è
possibile pulire la superficie di contatto dall'ossido.
Alluminio:
Per quanto riguarda l'alluminio, l'ossido si presenta duro e resistente ed inoltre ha una
resistività molto maggiore in confronto alla resistività dell'ossido di rame, questo
significa che si ha un aumento elevato della resistenza di contatto in quando il flusso
di corrente può passare solo dove si ha una rottura del film di ossido e questo
favorisce un aumento della resistenza di contatto.
Tutti i metalli, tranne quelli nobili, tendono a formare ossidi sulla superficie, gi ossidi
creano problemi funzionali per i contatti, questo perché hanno una elevata resistività
elettrica.
Per i contatti elettrici con basse forze di contatto, quindi per esempio per micro
contatti è preferibile utilizzare contatti rivestiti con metalli nobili in quanto non sono
sottoposti a processi di ossidazione così da non avere bisogno di elevate forze di
contatto per rompere il film di ossido presente sulla superficie di contatto, come
invece accade per i contatti di elevata potenza che a causa del costo del materiale, è
preferibile l'utilizzo di altri metalli abbinati a forze di contatto maggiori che sono in
grado di pulire la superficie.
44
Figura 26: Spessore film sulla superficie del contatto in funzione del tempo:
Il diagramma in Figura 26 riporta la crescita di ossido sui contatti in funzione del
tempo, la formazione degli ossidi è molto veloce. Ossidi di nichel e stagno vengono
definiti autolimitanti, cioè raggiunto un certo spessore tendono a non accrescere più il
loro spessore, mentre per esempio gli ossidi di rame e argento continuano a prodursi
ed accumularsi nel tempo
Figura 27: Resistenza di contatto in funzione dello spessore del film.
45
Il grafico in Figura 27 rappresenta la resistenza elettrica in funzione dello strato di
ossido.
Atmosfere molto inquinanti possono dare vita ad altri composti come cloruri, solfuri,
nitruri e idruri che possono contribuire ad alterare le caratteristiche fisiche sulla
superficie, e quindi modificare il valore della resistenza di contatto, aumentandola.
2.4.4 Fretting:
Il fenomeno del fretting è un meccanismo di degrado della superficie di contatto che
causa l'aumento della resistenza di contatto. Lo sviluppo di questo fenomeno è
strettamente legato al tipo di rivestimento utilizzato nel contatto elettrico.
Questo fenomeno non è invece presente nei rivestimenti costituiti da metalli nobili,
come per esempio l'oro.
Il fretting è un fenomeno di corrosione legato ai micromovimenti, questo fenomeno
avviene principalmente nei contatti placcati in stagno.
Lo stagno è un materiale soffice e duttile che presenta uno strato di ossido molto
fragile sulla sua superficie, essendo questo strato di ossido un semiconduttore il
passaggio della corrente può avvenire. Quando avviene il contatto la struttura rigida
di ossido si rompe e questo permette un contatto metallo-metallo con una bassa
resistenza di contatto, la rottura è dovuta al fatto che lo strato di ossido è fragile e non
può sostenere la pressione di contatto applicata.
46
Figura 28: Il fenomeno del Fretting.
Ad ogni contatto si crea una nuova interfaccia di contatto tra metallo e metallo
sempre diversa per ogni ciclo, quindi l'interfaccia di contatto formatasi durante il
primo ciclo rimane scoperta durante gli altri cicli in quanto lo strato di ossido è stato
rimosso in precedenza, in queste zone si viene a formare un nuovo strato di ossido.
Ad ogni spostamento dell'interfaccia di contatto si creano strati di ossido e detriti, tali
detriti si accumulano sulla superficie, aumentando il volume di ossido si avranno
sempre meno asperità utili per il contatto elettrico e di quindi il valore della resistenza
di contatto aumenterà.
Questo fenomeno è in stretta relazione con la forza di contatto, basse forze producono
pochi detriti ma non riescono a spostarli, grandi forze producono maggiori detriti ma
sono in grado di spostarli.
Figura 29: Resistenza di contatto in funzione dei cicli del contatto elettrico.
47
Il grafico in Figura 29 mostra l'andamento della resistenza di contatto in funzione dei
vari cicli e di diverse forze di contatto applicate.
Aumentando la forza di contatto la resistenza subisce gli effetti del fretting ma in
misura minore confronto a forze di contatto inferiori.
Un altro meccanismo di prevenzione contro il fenomeno del fretting è l'uso di
lubrificanti che permettono un numero di cicli maggiore.
Figura 30 Resistenza di contatto in funzione dei cicli del contatto elettrico.
Figura 31: Resistenza di contatto in funzione dei cicli del contatto elettrico.
2.4.5 Corrosione galvanica:
In un sistema bimetallico la corrosione galvanica è un altro meccanismo di degrado
molto importante. Ogni volta che metalli differenti sono accoppiati in presenza di una
48
soluzione contenente sali ionici, si è in presenza di corrosione galvanica. Il metallo
con il maggiore potenziale elettrolitico ha comportamento anodico e viene consumato
dall'azione galvanica. Per esempio nel caso di contatto alluminio-rame, l'anodo che è
l'alluminio si dissolve e si deposita sul rame. In questo modo l'area disponibile per il
contatto si riduce drasticamente e quindi si ha un forte incremento della resistenza di
contatto.
I fattori che intervengono nel processo di corrosione galvanica sono molti, il più
importante è l'umidità.
2.4.6 Rimbalzo del contatto:
Si ha il rimbalzo del contatto, più precisamente dell'elemento mobile su quello fisso,
quando gli elementi che si urtano fra loro sono dotati, come di norma, oltre che di
massa, anche di velocità ed elasticità non trascurabile.
La durata del rimbalzo può essere ridotta al minimo (frazione del millesimo di
secondo) riducendo, ad esempio, l'energia cinetica dell'elemento mobile (riduzione di
massa e velocità) oppure eliminarla del tutto con speciali accorgimenti meccanici.
Gli effetti deleteri del rimbalzo sono poco sentiti se la durata è relativamente breve.
Una situazione a cui bisogna prestare attenzione è la riapertura del contatto una volta
stabilita la continuità del circuito che può avvenire per vibrazioni che percorrono
l'apparecchio oppure oscillazioni. Una forza di contatto notevole rispetto al peso
dell'elemento mobile è il mezzo più semplice per risolvere questo tipo di problemi.
2.5 Materiali per i contatti elettrici:
I requisiti fondamentali per i materiali usati nei contatti elettrici sono riassunti di
seguito:
Resistenza di contatto minima e costante nel tempo:
Caratteristiche di scorrimento per lavorare con minori forze di inserzione:
49
Elevata resistenza ad usura:
Elevata resistenza a corrosione ed ossidazione:
Oltre alla caratteristiche fisiche del materiale devono essere considerati i costi legati
all'approvvigionamento ed alla lavorazione del materiale, quindi spesso si procede
alla riduzione degli spessori dei metalli preziosi per ridurre i costi.
I materiali usati principalmente per i conduttori elettrici e per i sottostrati dei contatti
sono il rame e l'alluminio, in Figura 32 si riportano le caratteristiche generali di alcuni
materiali:
Figura 32: Caretteristiche dei materiali.
Rame:
Il rame è un materiale morbido, malleabile e duttile dotato di una elevata conduttività,
date le sue caratteristiche è possibile realizzare una grande varietà di prodotti per ogni
tipo di applicazione, ed è il materiale più utilizzato per ogni tipo di applicazione
elettrica per la trasmissione di potenza.
In normali condizioni atmosferiche il rame è relativamente resistente alla corrosione,
che può essere prodotta da ambienti contenenti cloro. Inoltre l'uso di rame in
50
ambiente vicini al mare provoca una veloce corrosione del materiale. Infine ambienti
ricchi di solfuro portano all'ossidazione del materiale.
Per le applicazioni elettriche, soprattutto in quelle applicazione che richiedono molte
manovre, come per esempio gli apparecchi di sezionamento, le proprietà meccaniche
del rame devono essere migliorate a costo di peggiorare le proprietà elettriche.
I problemi principali per i contatti in rame risiedono nel fatto che il rame ha una
scarsa resistenza alla corrosione e ossidazione.
Le leghe metalliche utilizzate nei contatti elettrici sono svariate. In questo paragrafo
verranno solo accennate alcune caratteristiche dei materiali più usati, che sono le
leghe di rame (come bronzo e ottone) e l’acciaio.
Bronzo (CuSn):
Questa lega è composta principalmente di rame, che viene arricchito con stagno fino
all’8-9%, questo elemento dà luogo a leghe con buone caratteristiche meccaniche e
grande resistenza alla corrosione.
Queste leghe sono ancora lavorabili plasticamente e si possono laminare, estrudere,
forgiare, stampare e trafilare. Aumentando ulteriormente il tenore di stagno, la
durezza raggiunge livelli tali da consentire solo pezzi ottenuti per fusione, chiamati
anche getti.
-A livello industriale si arriva a produrre bronzi con tenori fino al 30% di stagno.
Tutti i bronzi presentano una conducibilità elettrica inferiore al rame puro. In genere i
bronzi contengono sempre elementi aggiunti oltre allo stagno e sono:
-il fosforo che disossida e aumenta la durezza (bronzi fosforosi), il piombo, lo zinco
ed il berillio.
51
Ottone (CuZn):
Questa lega è la più utilizzata nella produzione dei contatti elettrici e trova il suo
impiego con o senza rivestimento superficiale. Con tenori di zinco fino al 38% la lega
risulta duttile e malleabile a freddo.
-Le caratteristiche meccaniche migliorano all’aumentare del contenuto di zinco
mentre diminuiscono quelle elettriche e termiche.
Gli ottoni sono adatti per la colata in sabbia e in conchiglia e la presso colata, che si
applica a getti di piccole e medie dimensioni.
Rispetto al rame puro presenta valori più elevati di durezza, resistenza meccanica e
fusibilità.
Alla lega possono essere aggiunti altri elementi per modificarne le
proprietà come il ferro, lo stagno, l’alluminio, il nichel ed il silicio.
Acciaio:
Questa lega metallica è composta principalmente da ferro e carbonio, quest’ultimo in
percentuale non superiore al 2,11%: oltre tale limite le proprietà del materiale
cambiano e la lega assume la denominazione di ghisa.
Esistono tantissimi tipi di lavorazione, di produzione e di arricchimento dell’acciaio.
Per quanto riguarda i contatti elettrici,le tipologie più utilizzate sono l’acciaio
nichelato e l’acciaio inossidabile.
La combinazione acciaio-nichel offre la massima garanzia di affidabilità in presenza
di alte temperature. Le connessioni eseguite in acciaio nichelato possono infatti ben
sopportare temperature fino a 300 °C. L’acciaio inossidabile viene impiegato
anch’esso in presenza di temperature elevate dove l’ottone non garantisce più
52
l’assoluta affidabilità. L’acciaio inossidabile è il nome dato correntemente agli acciai
con un tenore di cromo indicativamente superiore al 13%, per la loro proprietà di non
arrugginire se esposti all'aria e all'acqua:
il cromo, ossidandosi a contatto con l'ossigeno, si trasforma in ossido di cromo
(CrO2) che crea uno strato aderente e molto resistente, impedendo un'ulteriore
ossidazione (tale fenomeno è noto come passivazione). Questo fenomeno aumenta la
resistenza di contatto.
2.5.1 Materiali per i rivestimenti:
Data la facile ossidazione dei metalli usati per i sottostrati dei contatti e quindi
l'incremento della resistenza di contatto, si vengono a peggiorare le prestazioni del
contatto e ad aumentare la temperatura operativa.
Per migliorare le caratteristiche dei metalli usati si procede quindi con il rivestimento
tramite altri materiali che consentano di ottimizzare le proprietà dei metalli.
Per prima cosa è necessario salvaguardare il contatto da possibili fenomeni chimici
che portano al degrado del materiale, come la corrosione e l'ossidazione. Inoltre
devono essere migliorate le caratteristiche meccaniche, per migliorare la resistenza
del materiale all'usura.
La scelta del materiale per il rivestimento deve seguire logiche elettriche, meccaniche
e chimiche.
In generale possiamo definire i seguenti requisiti meccanici ed elettrici:
Buone caratteristiche meccaniche, per poter sopportare sollecitazioni e
deformazioni dovute alle forze di contatto:
53
Buone caratteristiche elettriche, bassa resistenza di contatto.
Temperatura, umidità e specie corrosive determinano il tipo e la struttura
dei film che si formeranno sull'interfaccia di contatto:
Ci
sono
due
meccanismi
di
interazione tra superfici
che garantiscono
l’accoppiamento meccanico ed elettrico il rivestimento duro ed il rivestimento duttile.
Il rivestimento duro consiste semplicemente nell'accoppiare due materiali che hanno
determinate caratteristiche di durezza affinché non si abbia elevata compenetrazione
quando sono soggetti alla forza normale di contatto e quindi ad instaurare inevitabili
fenomeni di usura e abrasione.
Nello stesso tempo non devono permettere la formazione di film superficiali. Questo
meccanismo richiede l'uso però di metalli nobili e preziosi come l'oro duro e il
palladio. L'applicazione di questi materiali aumenta di molto il costo commerciale dei
contatti elettrici, quindi è opportuno limitarne l'uso.
Se invece viene utilizzato un rivestimento duttile, la forza di contatto normale riesce a
rompere il film di ossido creatosi sulla superficie e si creano i varchi per il passaggio
della corrente elettrica:
Figura 33: Rivestimento duro.
54
Figura 34: Rivestimento duttile.
I principale materiali usati per i rivestimenti sono:
Palladio Nichel (80Pd, 20Ni):
All'inizio degli anni '80, il palladio è stato utilizzato per la prima volta come
materiale alternativo per il costo più basso rispetto all'oro duro. L'impiego di palladio
non consente di eliminare completamente l'oro. Per contrastare la tendenza alla
formazione di film superficiali, prevenire la formazioni di ossidi e mantenere i valori
della resistenza di contatto costanti nel tempo per lunghi periodi è sempre necessario
applicare uno strato esterno di oro duro, con spessore inferiore a 0,2 μm (flash di
oro).Le leghe palladio-nichel (generalmente 80Pd, 20Ni) offrono anche alcuni
vantaggi tecnologici rispetto al palladio puro:
Minore sensibilità ai cianuri e all'inquinamento da metalli:
Duttilità più elevata:
Migliore resistenza ad abrasione:
Forze di inserzione più basse:
Durezza maggiore:
55
Minor assorbimento di idrogeno e quindi tensioni o sforzi interni
più bassi e depositi esenti da frattura:
Nichel:
Il nichel presenta caratteristiche molto utili nei contatti elettrici, alta resistenza ad
ossidazione e corrosione che lo rendono interessante per molto applicazioni. Viene
utilizzato per aumentare le caratteristiche meccaniche del rame, il nichel offre una
maggiore durezza e quindi il contatto ottiene una migliore resistenza all'usura.
Le caratteristiche del nichel non degradano la resistenza di contatto, ma invece
aiutano il contatto a non degradarsi e a mantenere la sua stabilità.
Argento:
L'argento, insieme al nichel, è il materiale più utilizzato nei contatti di alta potenza,
ha le migliori caratteristiche di conducibilità sia termica che elettrica, ha buone
caratteristiche di durezza e quindi viene impiegato in contatti di potenza insieme al
nichel e al rame.
Rivestimento in argento e nichel:
Il rame è il materiale più utilizzato per i contatti elettrici, sia come metallo pure che
come componente principale per le sue leghe, quindi insieme all'argento, nichel, oro e
stagno. Il rame però presenta l'inconveniente di essere sensibile alla corrosione,
questo dipende anche dall'ambiente in cui si viene a trovare il nostro materiale, per
esempio in ambienti molto inquinati si ha che il processo di corrosione è più marcato,
anche in condizioni di elevata umidità il processo è più veloce.
E' pratica comune utilizzare rivestimenti in argento per i contatti in rame, questo si
trova sia nei sistemi di distribuzione elettrica che in tutte le reti di trasmissione di
potenza. L'argento è un metallo nobile che non si ossida nella normale atmosfera,
inoltre possiede la migliore conducibilità sia termica che elettrica.
56
Sia il rame che l'argento sono sensibili sia al cloro che ai solfuri, questo significa che
sono soggetti a corrosione.
Gran parte dei problemi riguardanti i contatti elettrici sono dovuti al fatto che la
superficie del contatto viene contaminata da agenti esterni che avviano processi di
ossidazione e corrosione e come risultato si ha un aumento della resistenza di
contatto. I rivestimenti sono applicati per proteggere la superficie di contatto
dall'ossidazione e corrosione.
I principali materiali usati per i rivestimenti sono l'argento e il nichel, questo perché
sono molto stabili e garantiscono lo stabilità del contatto, l'argento ha migliori
caratteristiche elettriche e termiche mentre il nichel si dimostra più stabile e meno
costoso.
Per valutare l'effetto dei rivestimenti tra gli articoli presenti in letteratura si è scelto lo
studio svolto da Antler 204, in questo studio si sono presi tre campioni di rame, di
spessore 40 mm, 10 mm, 100 mm, il primo campione senza rivestimento, il secondo
rivestito in nichel e il terzo rivestito in argento. S riportano in Figura 35 le
caratteristiche diversi materiali:
Figura 35: Proprietà fisiche dei materiali:
57
Si è applicata una corrente pari a 700 A e si è misurata la temperatura dei tre
campioni.
In Figura 36 si riportano i valori di resistenza iniziali con applicata la stessa forza di
contatto, si nota come la resistenza di contatto del campione senza rivestimento sia
maggiore degli altri due e come quella del campione rivestito in argento sia la più
bassa di tutti.
Figura 36: Resistenza di contatto prima e dopo l'ossidazione:
Figura 37: Resistenza di contatto in funzione dei cicli del contatto.
58
Figura 38: Temperatura del contatto in funzione dei cicli del contatto.
In Figura 37 e Figura 38 si riportano la misura della temperatura per ogni campione, si
nota come la temperatura del campione in rame senza rivestimento sia maggiore
rispetto gli altri due, inoltre la temperatura del campione rivestito in argento è la
minore delle tre.
Figura 39: Caduta di tensione del contatto in funzione del tempo.
Figura 40: Percentuale di incremento della resistenza di contatto.
59
Sia la caduta di tensione che la resistenza di contatto sono maggiori nel campione in
rame, inoltre anche l'incremento percentuale di resistenza di contatto è maggiore che
negli altri due casi. Per quanto riguarda i campioni rivestiti la resistenza di contatto
rimane abbastanza bassa finché la temperatura del contatto rimane contenuta entro
valori abbastanza bassi.
La resistenza di contatto viene utilizzata come parametro per valutare l'abilità del
materiale usato per il rivestimento, l'abilità di proteggere le zone di contatto da
sfavorevoli effetti dell'ambiente in cui si trova il contatto.
La Figura 36 riporta la resistenza di contatto prima e dopo l'ossidazione del materiale,
come si nota dai valori riportati l'ossidazione del materiale non rivestito porta ad un
notevole aumento della resistenza di contatto, questo significa che il contatto non è
più stabile, i campioni rivestiti invece mostrano incremento notevole della resistenza
di contatto in presenza di ossidazione e ciò dimostra che i rivestimenti in nichel e
argento aumentano la stabilità del contatto.
2.6 Forze di repulsione tra i contatti elettrici:
Quando le superfici degli elementi del contatto non sono più regolari, a causa delle
alterazioni superficiali causate dalle operazione del contatto, le zone di passaggio
della corrente rimangono limitate in estensione e sparse sulla superficie nominale di
contatto. Il campo di densità della corrente ha linee di flusso come riportato in Figura
41. La forza di repulsione elettrodinamica è dovuta soprattutto a questa distribuzione
dei filetti elementari di corrente.
Figura 41: Andamento dei fili di corrente all'interno del contatto.
60
La forza di repulsione elettrodinamica che si manifesta fra gli elementi di contatto,
che diviene apprezzabile in caso di sovracorrente, ed in particolare in condizioni di
corto circuito, è fondamentale per la progettazione del contatto elettrico. Tale forza
potrebbe essere in grado di aprire il contatto quando viene superata la forza di
contatto. Se ciò si dovesse verificare, si ha l'innesco di un arco elettrico. Questa
condizione è molto dannosa per il contatto, in quanto l'elevato calore prodotto
dall'arco ha conseguenze molto gravi per i materiali e per il dispositivo.
Con riferimento alla geometria esposta in Figura 42, l'area totale di passaggio della
corrente, tenendo conto delle asperità sulla superficie a contatto e della deformazione
plastica di dette superfici, può essere data con sufficiente approssimazione
dall'espressione:
(2.6.1)
F rappresenta la forza di contatto e H la sollecitazione caratteristica in condizioni di
deformazione plastica.
Figura 42: Andamento schematico dei fili di corrente.
La valutazione di H non è banale. Come risulta dalla figura i fili elementari della
corrente in prossimità della superficie di contatto vengono ad avere una componente
lungo la direzione radiale:
61
Tale componente dei filetti elementari di corrente di un elemento di contatto,
interagendo con la corrente che percorre il contatto cooperante, è responsabile della
forza di repulsione tra i contatti.
Ipotizzando che la densità di corrente sia uniforme, la forza reciproca di repulsione
può essere espressa come:
(2.6.2)
dove a e b sono valutati come in Figura 42.
Inoltre si ha che:
(2.6.3)
dove con F viene rappresenta la forza di contatto applicata dall'esterno.
E' quindi possibile scrivere:
(2.6.4)
L'espressione consente di ricavare, con buona approssimazione, per una data forza
esterna applicata F, la corrente limite consentita, senza che si abbia repulsione tra i
contatti. Affinché l'espressione di Fr abbia significato si richiede che la differenza tra
Fr e F per quanto piccola rimanga comunque apprezzabile.
Il valore della corrente limite può essere calcolato imponendo per esempio Fr=0.9F.
Al fine di ridurre la forza di repulsione è conveniente suddividere la corrente I fra più
elementi di contatto n, in parallelo, cosicché ciascun elemento di contatto venga a
portare una corrente
.
62
Figura 43: Esempio di contatto elettrico.
Si conclude che la forza totale F esterna necessaria per condurre la corrente I, senza
che si abbia repulsione fra i contatti, risulta con buona approssimazione,
inversamente proporzionale ad n. Ciò è dovuto al fatto che la forza elettrodinamica
agente su un singolo contatto è proporzionale al quadrato della corrente circolante in
esso, ne consegue che suddividendo la corrente su n contatti, la forza per ogni singolo
contatto si riduce di n2, mentre la forza agente sull'intero dispositivo, di n contatti, la
riduzione della forza è del tipo 1/n.
Chiaramente la forza di repulsione è trascurabile nel caso in cui il contatto sia
attraversato dalla sua corrente nominale, ovviamente in caso di corto circuito le
correnti in gioco sono molto più elevate ed inoltre essendo la forza di repulsione
proporzionale al quadrato della corrente, gli effetti di repulsione causati dalla corrente
nominale che attraversa il contatto sono del tutto trascurabili.
Reciprocamente, data una forza esterna applicata, la corrente limite totale che un
contatto, suddiviso in n elementi in parallelo, è capace di portare senza che si abbia
repulsione è , con buona approssimazione, data da quella portata dal contatto
costituito da un solo elemento, moltiplicata per
.
La trattazione sopra esposta si basa sull'ipotesi che le superfici a contatto siano
entrambe sferiche, o una sferica e l'altra piana, e costituite dallo stesso materiale.
Inoltre si ipotizza che gli elementi in contatto siano circolari e di pari diametro.
Per ragione costruttive e funzionali i contatti non rispondono a questa geometria:
63
-Se i contatti non hanno lo stesso diametro, il valore di b da inserire nella formula è
dato dl valore medio dei due diametri .
-Se gli elementi di contatto hanno una forma squadrata con lati l1 e l2:
(2.6.5)
-Se:
(2.6.6)
In genere una delle superfici di contatto, o entrambe, è cilindrica, in questo caso il
valore di a' può essere ottenuto dall'espressione:
(2.6.7)
e b=
:
Figura 44: Geometria del contatto.
L'espressione della forza elettrodinamica in caso di geometria sferica è
rigorosa perché dedotta da leggi fisiche applicate al caso, in questo ultimo
caso, cioè di geometria cilindrica, la formula trovata non è rigorosa, ma è
64
una approssimazione della prima, quindi può essere utilizzata solo per
valori di orientamento.
Se i due materiali in contatto sono costituiti da materiali diversi, il valore
di H può essere preso come il valore più basso fra i due corrispondenti ai
due differenti materiali.
La suddivisone del contatto in n elementi in parallelo può essere utile, come mostrato
in precedenza, alla riduzione della forza di repulsione totale, e in genere può anche
essere utile per il rimbalzo del contatto,e può aumentare la capacità di dissipare
calore.
Oltre alla forza elettrodinamica di repulsione tra gli elementi di contatto esistono
sempre forze elettrodinamiche tra i bracci del contatto che possono favorire o
contrastare la repulsione tra i contatti:
Figura 45: Geometria del contatto.
La forza elettrodinamica tra i bracci paralleli e percorsi da correnti
controverse favorisce l'apertura dei contatti:
65
Figura 46: Apertura del contatto.
2.6.1 Electrodynamic Repulsion Between Electric Contacts with Arbitrary CurrentDensity Distribution:
Se un contatto elettrico di un dispositivo elettromeccanico è sottoposto ad una grande
corrente impulsiva, come può accadere in condizioni di corto circuito, si possono
creare elevate forze elettrodinamiche che tendono ad aprire il contatto e ad innescare
l'arco
elettrico
che
comporta
devastanti
conseguenze
per
il
dispositivo
elettromeccanico.
Figura 47:Geometria del contatto in esame.
L'area che viene attraversata dal flusso di corrente quando il contatto è chiuso può
essere molto minore della superficie di contatto apparente, per semplificare la
66
geometria del contatto ed arrivare a comprendere le problematiche principali si
introducono alcune semplificazioni:
Geometria simmetrica rispetto gli assi:
L'area di passaggio dei flussi di corrente ha la forma di un contatto
circolare:
Le linee di forza generate dal campo magnetico sono circolari, la teoria di Holm
arriva a definire una formula per la forza di repulsione F:
(2.6.1.1)
dove µ è la permeabilità, I la corrente, A è il raggio di contatto e a è il raggio dell'aSpot di contatto.
La densità di corrente all'area di contatto è espressa da una generica funzione j(r),
mentre al fine del contatto possiamo assumere che la densità di corrente sia costante e
pari a:
Jo=
(2.6.1.2)
(2.6.1.3)
Questo sottolinea il fatto che la corrente scorre in un cerchio di raggio r in prossimità
della superficie di contatto, inoltre possiamo dire che:
67
(2.6.1.4)
Per calcolare il campo magnetico nel generico punto P, possiamo semplicemente
usare l'equazione:
(2.6.1.5)
Le linee di corrente che scorrono tra i raggi r e r ' trasportano una corrente data da:
(2.6.1.6)
Quindi è possibile calcolare la forza di Lorentz elementare, data dall'equazione:
(2.6.1.7)
Integrando tale equazione otteniamo:
(2.6.1.8)
(2.6.1.9)
La distribuzione della densità di corrente j(r) nell'intorno della zona di contatto
dipende dalla forma delle due parti che compongono il contatto e dal loro
comportamento termico, in generale è possibile descrivere j(r) analiticamente, ma
concentriamoci su due casi particolari:
La distribuzione di corrente sia costante che porta alla formula definita da
Holm:
68
Se si vuole maggiore accuratezza, si può descrivere j(r) tramite:
(2.6.1.10)
Questa funzione rappresenta la soluzione esatta nel caso di A tendente ad infinito e
può essere utilizzata nel caso in cui il rapporto A/a sia elevato:
(2.6.1.11)
Il reale risultato si troverà a metà tra questi due casi limite, essendo il rapporto A/a
compreso tra 5 e 10 questo dimostra come la reale distribuzione di corrente nel
contatto non influenzi molto il risultato.
69
3.Modello Meccanico:
Per caratterizzare opportunamente un contatto elettrico non si può prescindere dal
calcolare la pressione di contatto determinata dall'accoppiamento tra lama e pinza e
dal calcolo della distribuzione degli sforzi interni alla pinza. La determinazione della
pressione di contatto garantisce la caratterizzazione del contatto e inoltre fornisce un
parametro molto utile per valutare l'effettivo valore della resistenza di contatto che è
il parametro usato per valutare la qualità del dispositivo.
Tra le varie tipologie di contatto elettrici che vengono utilizzati come contatti sui
sezionatori, sia di messa a terra che come switch tra i vari circuiti di alimentazione
del treno, 3 kV DC e 25 kV AC, si è scelta di analizzare una tipologia di pinza, quella
riportata in foto:
Figura 48:Foto pinze sezionatore di Zefiro MT
70
Figura 49: Foto pinze sezionatore di Zefiro MT.
Figura 50: Pinza 00875.
71
Figura 51: Pinze sezionatore di Zefiro.
Figura 52: Pinza del sezionatore dell'ETR-1000.
L'analisi meccanica è stata effettuata su tre diversi modelli della stessa tipologia di
pinza per valutare le possibili differenze e valutare i diversi fattori che incidono sulla
qualità del contatto.
Si è proceduto in prima istanza a costruire un modello geometrico delle
pinze
semplificato. A valle di ciò, si è proceduto con l'analisi FEM al fine di ottenere
risultati più precisi per i diversi fattori, inoltre poter validare i risultati ottenuti dal
calcolo FEM.
72
Una volta acquisita sensibilità sui valori ottenuti per i diversi fattori, principalmente
la pressione di contatto, si è proceduto al calcolo della resistenza di contatto per
confrontare questi valori con i valori di resistenza di contatto ottenuti tramite prove
sperimentali.
3.1 Modello analitico:
In questa tipologia di contatti, per valutare la pressione e la forza esercitata dalla
pinza sulla lama è necessario considerare la deformazione che avviene sulla pinza
quando la lama entra nel contatto.
Tramite prove sperimentali sulle pinze si è calcolata la deformazione che avviene a
contatto completamento chiuso, quindi a lama inserita. Questo parametro è stato
usato come ingresso nel modello per arrivare a valutare la forza esercitata dal
contatto.
La deformazione totale è stata poi suddivisa tra le varie parti della pinza tramite
semplici calcoli analitici.
Si è inoltre di analizzata una tipologia di pinza diversa a titolo di confronto. In questa
tipologia di pinza la forza esercitata dalla pinza sulla lama non è dovuta a
deformazione della pinza stessa ma è data dalle molle opportunamente dimensionate.
Tale contatto, geometricamente più complesso, risulta semplice da modellizzare dal
punto di vista meccanico e non richiede una analisi FEM.
3.1.1 401840:
Si è scelto di partire inizialmente con questo tipo di contatto perché è il più semplice
come tipologia, inizialmente si era pensato di modellizzare la pinza tramite tre travi,
questo comporta grosse approssimazioni ma può essere un punto di inizio per poi
valutare più dettagliatamente la pinza:
73
A
B
D
C
Figura 53: Modello semplificato della pinza.
Dati Pinza
[mm]
Spessore
2
AB
44
BC
6
CD
35
Deformazione Tot
0.5
Figura 54: Dati geometrici delle pinza sottoposta allo studio.
Si è inoltre ipotizzato che il carico sulla trave CD sia lineare, anche questa
approssimazione comporta errori ma il modello è utile per ottenere sensibilità sui
diversi fattori coinvolti nel modello.
[mm]
Deformazione AB
0,020995984
Deformazione BC
0,194849
Deformazione CD
0,284155
Deformazione Tot
0.5
Figura 55: Suddivisione delle deformazioni sulle diverse parti della pinza.
74
Si ottiene un carico lineare sulla trave CD pari a p=3.994185 N/mm.
Per togliere approssimazioni al modello si è deciso di modellizzare la trave CD come
un semicerchio, con questa ipotesi si ottengono i seguenti valori:
A
B
D
C
Figura 56: Modello più complesso della pinza sottoposta al nostro studio.
[mm]
Deformazione AB
0,034242153
Deformazione BC
0,002332251
Deformazione CD
0,463425596
Deformazione Tot
0.5
Figura 57: Suddivisione delle deformazioni sulle diverse parti della pinza.
Si ottiene un carico lineare sulla trave CD pari a p= 6,51408 N/mm.
D_AB
D_BC
D_CD
6,848430503 %
0,466450235 %
92,68511926 %
Figura 58: Percentuale di deformazione sulle diverse parti della pinza.
75
Deformazione
f_AB
f_BC
f_CD
Figura 59: Percentuale di deformazione sulle diverse parti della pinza.
Inoltre facendo variare il parametro deformazione totale, quindi simulando l'ingresso
della lama nel contatto si è arrivati a calcolare la variazione del carico lineare sulla
trave CD:
p [N/mm]
7
6
5
4
p [N/mm]
3
2
1
0
0
0,05 0,1 0,15 0,2 0,25 0,3 0,35 0,4 0,45 0,5
Figura 60: Variazione del carico lineare sulla trave CD.
76
3.1.2 00875:
Lo stesso procedimento è stato effettuato anche per questo contatto, quindi si è partiti
con il modellizzare la pinza come se fosse composta da tre travi:
A
B
D
C
Figura 61: Modello semplificato della pinza.
Dati Pinza
[mm]
Spessore
2
AB
90
BC
5
CD
53
Deformazione Tot
5
Figura 62: Dati geometrici delle pinza sottoposta allo studio.
Anche in questo caso si è ipotizzato che il carico sulla trave CD sia lineare.
[mm]
Deformazione AB
0,107369355
Deformazione BC
1,340447
Deformazione CD
3,552184
Deformazione Tot
5
Figura 63: Suddivisione delle deformazioni sulle diverse parti della pinza.
77
Si ottiene un carico lineare sulla trave CD pari a p= 14,37954 N/mm.
Per togliere approssimazioni al modello si è deciso di modellizzare la trave CD come
un semicerchio, con questa ipotesi si ottengono i seguenti valori:
A
B
D
C
Figura 64: Modello più complesso della pinza sottoposta al nostro studio.
[mm]
Deformazione AB
0,146028692
Deformazione BC
0,022790524
Deformazione CD
4,831180784
Deformazione Tot
5
Figura 65: Suddivisione delle deformazioni sulle diverse parti della pinza.
Si ottiene un carico lineare sulla trave CD pari a p= 19,55703 N/mm.
D_AB
D_BC
D_CD
2,920573833 %
0,455810479 %
96,62361569 %
Figura 66: Percentuale di deformazione sulle diverse parti della pinza.
78
Deformazione
f_AB
f_BC
f_CD
Figura 67: Percentuale di deformazione sulle diverse parti della pinza.
Inoltre facendo variare il parametro deformazione totale, quindi simulando l'ingresso
della lama nel contatto si è arrivati a calcolare la variazione del carico lineare sulla
trave CD:
25
p [N/mm]
20
15
10
p [N/mm]
5
0
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5
Figura 68: Variazione del carico lineare sulla trave CD.
79
3.1.3 343009:
Essendo in questo caso la geometria differente si è deciso di modellizzare il contatto
tramite due travi:
A
B
C
F
Figura 69: Modello della pinza:
Inoltre in questo caso, data la geometria del contatti, si è considerata una forza
applicata in C e non un carico lineare:
Dati Pinza
[mm]
Spessore
4
AB
67.5
BC
32.72
Deformazione Tot
1
Figura 70: Dati geometrici delle pinza sottoposta allo studio.
In questo caso si ottengono i seguenti valori:
[mm]
Deformazione AB
0,91025464
Deformazione BC
0,089745361
Deformazione Tot
1
Figura 71: Suddivisione delle deformazioni sulle diverse parti della pinza.
80
D_AB
D_BC
91,02546389 %
8,974536111 %
Figura 72: Percentuale di deformazione sulle diverse parti della pinza.
Deformazione
f_AB
f_BC
Figura 73: Percentuale di deformazione sulle diverse parti della pinza.
Si ottiene una forza pari a F=327,26 N.
In questo caso essendo il contatto localizzato in un punto è possibile valutare la
pressione del contatto tramite la teoria dei contatti Hertziani, assumendo come
contatto l'ipotesi di contatto tra cilindro e piano:
Figura 74: Teoria di Hertz
81
a=
m1=
m2=
dove v1 è il modulo di Poisson del materiale che compone il contatto e E1 è il
modulo di Young del materiale.
Si è ipotizzato che il contatto sia composto dallo stesso materiale, in questo caso
rame, otteniamo i seguenti valori:
Contatto Hertziano Cilindro su piano
Mod. Poisson Rame
0,33
F
327,261735
N
L
20
mm
m1
7,3041E-06
m2
7,3041E-06
B
0,1
1/mm
E
122000
Mpa
R1
5
mm
a
0,03901945
mm
Pmax
267,106518
Mpa
Pmed
209,678617
Mpa
Figura 75: Pressione di contatto calcolata tramite la teoria di Hertz.
Facendo variare il parametro deformazione si ottengono gli andamenti della forza e
della pressione del contatto in funzione del parametro deformazione:
82
F [N]
350
300
250
200
F [N]
150
100
50
0
0
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
1
Figura 76: Andamento della forza.
P_Max [Mpa]
300
250
200
150
P_Max [Mpa]
100
50
0
0
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
1
Figura 77: Andamento della pressione di contatto.
83
3.1.4 S3:
Non avendo più il parametro deformazione da considerare, in questo caso va tenuto
conto del fatto che sono presenti due molle che esercitano la forza che tiene unito il
contatto.
Figura 78: Foto pinza sezionatore S3:
Per prima cosa si è valutata la forza esercitata dalla molla, dopodiché si è valutata la
forza applicata nel punto di contatto e tramite la teoria dei contatti Hertziani si è
valutata la pressione del contatto con il modello già usato precedentemente di
contatto cilindro su piano.
L1
F_1
L2
F_Molla
F_2
Figura 79: Modello semplificato pinza S3.
84
L1
L2
21,5
29,5
Escursione
Braccio molla
Braccio perni
Caratteristiche Molla
D medio 0,01015
G acciaio 84615,38462
d filo
0,00235
N_Spire 4
K Molla 77121,00437
1,5
21,5
51
Mm
Mm
mm
mm
mm
M
N/mm2 84,61538462 N/m2
M
N/m
77,12100437 N/mm
Figura 80: Caratteristiche geometriche della pinza e caratteristiche della molla.
Si ottengono le seguenti forze, si deve considerare che in questa tipologia di pinza
sono presenti due molle che esercitano una forza sui denti a cui sono collegate:
F_Molla
97,52132629 N
F_Molla_Singola 48,76066315 N
Figura 81: Forza ottenuta dalla molla.
Considerando la forza F_2 che è quella applicata alla lama, calcoliamo la pressione di
contatto:
Contatto Hertziano cilindro su
piano
F2
L
m1
m2
B
R1
a
Pmax
Pmed
20,55596584
3
7,45902E-06
7,45902E-06
0,058823529
8,5
0,033268922
131,1832091
102,9788191
N
mm
1/mm
mm
mm
Mpa
Mpa
Figura 82: Pressione di contatto calcolata tramite i contatti Hertziani.
85
Facendo variare il parametro escursione, nei casi precedenti era il parametro
deformazione, otteniamo l'andamento della pressione di contatto:
P_Max [Mpa]
140
120
100
80
P_Max [Mpa]
60
40
20
0
0
0,15
0,3
0,45
0,6
0,75
0,9
1,05
1,2
1,35
1,5
Figura 83: Andamento della pressione di contatto.
Per questa tipologia di contatto si è pensato di non sviluppare un'analisi FEM in
quanto si è ritenuto che il modello sia abbastanza privo di approssimazioni, e inoltre
anche se geometricamente il contatto è più complesso la modelizzazione è resa più
semplice dalla presenza delle molle e quindi non è necessario legare la deformazione
della geometria alla forza e questo riduce la complessità del modello e quindi
migliora l'approssimazione ed i risultati.
3.2 Analisi FEM:
Per valutare tutti i fattori che entrano in gioco nel modello meccanico dei contatti
elettrici senza introdurre le approssimazioni necessarie per un approccio analitico al
problema, si è messo punto un modello agli elementi finiti tramite un'analisi FEM.
La complessa geometria delle pinze analizzate e le conseguenti forti approssimazioni
che caratterizzano il modello analitico sopra riportato, portano ad errori nella
valutazione dei parametri, specialmente della pressione di contatto che è il parametro
86
che più interessa da un punto di vista meccanico. Il modello semplificato, in questi
cai, permette di determinare gli ordini di grandezza delle incognite del problema in
modo da validare i risultati provenienti dall'analisi FEM, che porta invece a risultati
più precisi. Tali risultati verranno utilizzati per il calcolo della resistenza di contatto.
3.2.1 401840:
La Figura 84: Condizione iniziale del sistema. raffigura la condizione iniziale del sistema,
da questa condizione verrà applicato uno spostamento alla lama fino al punto di
completa inserzione nella pinza:
Figura 84: Condizione iniziale del sistema.
In Figura 85 si riporta la condizione finale in cui la lama è completamente inserita
nella pinza, inoltre si nota l'andamento degli sforzi interni alla pinza:
87
Figura 85: Condizione finale del sistema.
Figura 86: Sforzi sulla superficie della pinza ad inserzione completa.
Si riporta anche l'andamento delle pressioni all'interno del volume della pinza:
88
Figura 87: Andamento delle pressione nel volume.
In Figura 88 e in Figura 89 vengono riportati l'andamento della pressione di contatto e
l'andamento della forza di inserzione necessaria per ogni valore del parametro
spostamento:
Figura 88: Andamento della pressione di contatto durante l'inserzione della lama.
89
Figura 89: Andamento della forza di inserzione durante l'ingresso della lama nel contatto.
3.2.2 00875:
La Figura 90 raffigura la condizione iniziale del sistema, da questa condizione verrà
applicato uno spostamento alla lama fino al punto di completa inserzione nella pinza:
Figura 90: Condizione iniziale del sistema.
90
In Figura 91 si riporta la condizione finale, in cui la lama è completamente inserita
nella pinza, inoltre si nota l'andamento degli sforzi interni alla pinza:
Figura 91: Condizione finale del sistema.
Figura 92: Sforzi sulla superficie della pinza ad inserzione completa.
In Figura 93 si riportano l'andamento delle pressioni all'interno del volume della pinza:
91
Figura 93: Andamento delle pressione nel volume.
In Figura 94 e in Figura 95 si riportano l'andamento della pressione di contatto e inoltre
l'andamento della forza di inserzione necessaria per ogni valore del parametro
spostamento:
Figura 94: Andamento della forza di inserzione durante l'ingresso della lama nel contatto.
92
Figura 95: Andamento della pressione di contatto durante l'ingresso della lama nel contatto su una singola lamella.
Figura 96: Andamento della pressione di contatto durante l'ingresso della lama nel contatto.
In Figura 94, Figura 95 e Figura 96 vengono riportati rispettivamente gli andamenti della
forza di inserzione, pressione di contatto su una singola lamella e la pressione di
contatto totale esercitata dalla pinza.
Data la geometria della pinza, si è ritenuto utile calcolare non sono la pressione di
contatto esercitata da tutte le lamelle della pinza ma anche quella esercitata dalla
singola lamella. Questo perché si è ritenuto necessario indagare sulle pressioni in
gioco fornite dalla pinza e per confronto con le tipologie di pinze esposte in seguito.
93
3.2.3 343009 (ETR-1000):
La foto raffigura la condizione iniziale del sistema, da questa condizione verrà
applicato uno spostamento alla lama fino al punto di completa inserzione nella pinza:
Figura 97: Condizione iniziale del sistema.
In Figura 99 si riporta la condizione finale in cui la lama è completamente inserita
nella pinza, inoltre si nota l'andamento degli sforzi interni alla pinza:
Figura 98: Condizione finale del sistema.
94
Figura 99: Sforzi sulla superficie della pinza ad inserzione completa.
In Figura 100 si riporta l'andamento delle pressioni all'interno del volume della pinza:
Figura 100: Andamento delle pressione nel volume.
95
In Figura 101, Figura 102 e in Figura 103 si riportano l'andamento della forza di
inserzione, l'andamento della pressione di contatto su una singola lamella e
l'andamento della pressione di contatto esercita da tutta la pinza:
Figura 101: Andamento della forza di inserzione.
96
Figura 102: Andamento della pressione di contatto durante l'ingresso della lama nel contatto su una singola lamella.
Figura 103: Andamento della pressione di contatto durante l'ingresso della lama nel contatto.
97
3.3 Conclusioni:
Come ipotizzato è stato verificato che le pinze con spessore maggiore sono
caratterizzate da una pressione di contatto molto maggiore, inoltre è stato verificato
come oltre allo spessore sia importante il modo di connessione tra le due superfici
metalliche, per esempio le pinze costituite da più lamelle hanno sicuramente una
superficie di contatto minore e quindi una pressione maggiore, dato che la teoria del
contatto ci mostra come tra due superficie metalliche in contatto la corrente scorre
solo in alcuni punti chiamati a-Spots questa soluzione risulta essere molto più
soddisfacente sia in termini di pressione di contatto che di resistenza di contatto.
Si nota come sia più efficace la soluzione adotta per la pinza 343009-ETR-1000, dai
risultati trovati risulta chiaro la maggior pressione di contatto rispetto alle altre pinze
analizzate, la ragione di questo fatto risiede nella diversa geometria adottata per la
pinza in questione. Dai risultati trovati risulta chiaro che, affinché un contatto sia
davvero efficiente, non è necessario che l'area apparente di contatto sia maggiore,
come accade nelle pinze 00875 e 401840, ma è preferibile un contatto con minore
area apparente e maggiore pressione di contatto localizzata in alcuni punti in modo da
garantire un contatto metallo-metallo stabile, in questo modo si limita la resistenza di
contatto in quanto si facilita il passaggio della corrente tra le due superfici.
Dall'analisi meccanica dei dispositivi risulta chiaro come sia migliore una soluzione
basata su pochi punti di contatto e caratterizzati da una elevata pressione piuttosto che
avere grandi superfici nominali di contatto ma caratterizzate da pressione
relativamente basse.
Questo fenomeno è legato al fatto che la reale area di contatto tra due solidi non è
data dalla superficie nominale di contatto ma dai reali punti di connessione, cioè gli
a-Spots nei quali scorre il flusso di corrente.
98
Per ottenere una minore resistenza di contatto è quindi necessario creare punti di
contatto metallo-metallo ad elevata pressione anche se la superficie nominale di
contatto diminuisce.
Inoltre l'elevata forza di contatto garantisce l'auto-pulizia del contatto e quindi un
valore di resistenza più costante nel tempo.
Tramite l'analisi FEM si è inoltre verificato come la presenza di diversi denti non
comporti un vantaggio da un punto di vista meccanico per quanto riguarda la
pressione di contatto, mentre da un punto di vista elettrodinamico questo comporta
alcuni vantaggi che verranno esposti in seguito.
Lo spessore della pinza incide molto sulla pressione del contatto, si noti come nel
modello 343009, in cui si ottiene la pressione di contatto più elevata, lo spessore sia
di 4 mm, per effettuare un confronto è stata eseguita l 'analisi FEM su una pinza tipo
00875 modificata, cioè si è incrementato lo spessore da 2 mm a 4 mm, di seguito si
riportano i risultati ottenuti:
In Figura 104 si riporta l'andamento della pressione di contatto nel caso di pinza con
spessore 4 mm:
Figura 104: Pressione di contatto con spessore 4 mm.
99
4.Valutazione della resistenza di contatto:
Eseguita la caratterizzazione meccanica delle pinze resta da calcolare la resistenza di
contatto e confrontarla con il valore misurato sperimentalmente.
Una volta calcolata la forza esercita dal contatto risulta facile arrivare alla valutazione
della resistenza del contatto, tramite la formula a cui si è arrivati nel capitolo
riguardante la resistenza di contatto:
(4.1)
-401840:
Materiale Pinza
Materiale Lama
Rc [mΩ]
Rc_sperim [mΩ]
Bronzo
Bronzo
0.2170
0.2468
Bronzo
Rame argentato
0.1269
0.1223
Figura 105: Resistenza di contatto per i diversi materiali, calcolata e misurata sperimentalmente.
F
[N]
1
2
3
4
5
6
7
8
9
10
Rc Cu
[mΩ]
0,4014 0,2838 0,2317 0,2007 0,1795 0,1639 0,1517 0,1419 0,1338 0,1269
Figura 106: Resistenza di contatto in funzione della forza di contatto.
R_c Bronzo_Rame [mohm]
0,6
0,4
R_c
Bronzo_Rame
[mohm]
0,2
0
1 2 3 4 5 6 7 8 9 10
Figura 107: Andamento della resistenza di contatto in funzione della forza di contatto per una pinza in rame e lama in
argento.
100
-00875:
Materiale Pinza
Materiale Lama
Rc [mΩ]
Rc_sperim [mΩ]
Bronzo
Rame argentato
0.0271
0.0361
Figura 108: Resistenza di contatto calcolata e misurata sperimentalmente.
F
[N]
10
25
50
100
125
150
180
190
200
220
Rc
[mΩ]
0,1269 0,0802 0,0567 0,0401 0,0359 0,0327 0,0299 0,0291 0,0283 0,0271
Figura 109: Resistenza di contatto in funzione della forza di contatto.
R_c [mohm]
0,14
0,12
0,1
0,08
R_c [mohm]
0,06
0,04
0,02
0
10
25
50
100 125 150 180 190 200 220
Figura 110: Andamento della resistenza di contatto in funzione della forza di contatto.
-343009:
Materiale Pinza
Materiale Lama
Rc [mΩ]
Rc_sperim [mΩ]
Rame argentato
Rame argentato
0.0118
0.0123
Figura 111: Resistenza di contatto calcolata e misurata sperimentalmente.
F
[N]
100
200
300
400
Rc
[mΩ]
0,0333
0,0235
0,0192 0,0166
500
550
600
650
700
800
0,0149
0,0142
0,0136
0,0130
0,0126
0.0118
Figura 112: Resistenza di contatto in funzione della forza di contatto.
101
R_c [mohm]
0,04
0,035
0,03
0,025
0,02
R_c [mohm]
0,015
0,01
0,005
0
100 200 300 400 500 550 600 650 700 800
Figura 113: Andamento della forza di contatto in funzione della resistenza di contatto.
S3:
Materiale Pinza
Materiale Lama
Rc [mΩ]
Rc_sperim [mΩ]
Rame argentato
Rame argentato
0,0201
0.0207
Figura 114: Resistenza di contatto calcolata e resistenza di contatto misurata.
F
[N]
1
5
10
15
20
24
29
34
39
44
49
Rc
[mΩ]
0,1
0,063
0,0448 0,0366 0,0317 0,0283 0,0259 0,0239 0,0224 0,0211 0,0201
Figura 115: Resistenza di contatto in funzione della forza di contatto applicata.
Rc [mohm]
0,12
0,1
0,08
0,06
Rc [mohm]
0,04
0,02
0
1 5 10 15 20 24 29 34 39 44 49
Figura 116: Andamento della resistenza di contatto in funzione della forza di contatto applicata.
102
4.1 Conclusioni:
I valori di resistenza di contatto attenuti tramite il calcolo analitico sono simili ai
risultati ottenuti sperimentalmente, le differenze tra i risultati sono dovute alla
difficile valutazione dei parametri che si trovano nella formula 4.1 in cui sia F che H
non hanno una valutazione banale.
Per questo motivo è utile utilizzare tale formula per avere una idea sull'ordine di
grandezza della resistenza di contatto, ma non è possibile arrivare a risultati
ragionevolmente precisi. Per caratterizzare opportunamente una pinza è necessario
l'analisi meccanica svolta nel capitolo III e non si può fare riferimento alla
valutazione analitica della resistenza di contatto.
La valutazione della resistenza di contatto rimane comunque un buon metodo per
caratterizzare un pinza ma non è possibile arrivare a risultati precisi, senza errori
ragionevolmente piccoli.
103
5.Modello termico e prova di tenuta:
In questo capitolo viene affrontato il problema della tenuta ad una corrente di breve
durata del contatto elettrico e quindi del sezionatore, le norme prevedono una prova
di tenuta con corrente nominale pari a 5000 A per un 1 s. La prova viene eseguita in
corrente continua e si viene a calcolare la temperatura a cui si portano la lama del
sezionatore e le pinze del sezionatore.
Il sezionatore su cui si è eseguita la prova tramite il software FEM è un sezionatore di
messa a terra, Zefiro MT, montato sul nuovo freccia rossa, il nuovo ETR-1000.
Lo scopo è quello di valutare se il dispositivo sia in grado di resistere a questo tipo di
prova che verrà eseguita successivamente nei laboratori CESI di Milano.
5.1 Modello:
Figura 117: Pinze e lame soggette al nostro studio ( Sezionatore di Zefiro MT).
La prova viene eseguita su una sola lama e su una sola pinza, in questo caso essendo
il fenomeno prettamente adiabatico data la velocità della prova possiamo non
104
considerare il resto del sezionatore e quindi semplificare di molto la geometria del
dispositivo.
Per risolvere il problema, data la difficoltà della geometria, essendo il contatto
definito dalla deformazione della pinza durante l'ingresso della lama, anche in questo
caso nel modello si deve considerare la componente meccanica del problema, infatti
non è possibile arrivare a risultati veritieri senza considerare la deformazione della
pinza e quindi la pressione del contatto. Questo aumenta il tempo di risoluzione e la
complessità del modello.
Essendo il fenomeno prettamente adiabatico si è deciso di non considerare l'aria
circostante il sezionatore ma solo di inserire un coefficiente di scambio termico per
ogni parte del sezionatore che tenesse conto della cessione del calore dal sezionatore
all'aria anche: tale flusso di calore risulta comunque trascurabile rispetto alla quota
parte di calore messa in gioco dall'accumulo termico all'interno dei componenti del
sezionatore.
L'analisi termica è stata effettuata nel dominio del tempo per consentire il passaggio
della nominale in continua per un valore pari a 5000 A per 1 s.
Per semplificare ulteriormente il problema si è deciso di utilizzare solo una lama e
una pinza, non considerando l'albero a cui le pinze sono fissate, inoltre si è deciso per
questa via perché è stato possibile effettuare alcune prove termiche presso SPII S.p.a
con una geometria molto simile a questa, quindi si voleva valutare la veridicità del
nostro modello.
Le prove presso il laboratorio di SPII S.p.a sono state eseguite con una corrente
nominale minore, pari a 3680 A, massima corrente erogabile dall'alimentatore in
corrente continua, per 1 s.
Inoltre il movimento della lama in ingresso alle pinze è stato semplificato per
garantire una maggiore velocità di elaborazione e perché in questo caso non
interessava valutare la parte meccanica.
105
Figura 118: Modello usato in Comsol.
Il sezionatore è costituito da lame composta da acciaio Inox e pinza composte da
bronzo, l'ingresso della corrente è stato applicato nella parte esterna della lama. Il
passaggio della corrente avviene a lama inserita ed fissando il potenziale di terra ai
punti di contatto della pinza con la restate parte del sezionatore. Nel modello questo
significa che i fori passanti sono al potenziale di riferimento cosi da ottenere il
passaggio di corrente dalla lama alla pinza.
106
5.2 Risultati:
Come ipotizzato la parte in acciaio del sezionatore arriva ad assumere temperature
molte elevate che raggiungono i 300 °C mentre la pinza dato il materiale raggiunge
temperature più basse.
-Prova a 3680 A:
Figura 119: Gradino di corrente in ingresso.
107
Figura 120: Temperatura pinza sopra.
Figura 121: Temperatura pinza sotto.
108
Figura 122: Temperatura Lama.
Figura 123 Tempertura piastra sopra
109
-Prova a 5000 A:
Figura 124: Gradino di corrente in ingresso.
Figura 125: Tempertura Pinza sopra.
110
Figura 126: Tempertura Pinza Sotto.
Figura 127: Temperatura Lama
111
Figura 128: Tempertura Piastra sopra.
Dai risultati è chiaro, come era ipotizzabile, che la lama costituita da acciaio Inox sia
la componente del sezionatore che risenta in modo maggiore del passaggio di
corrente. La temperatura delle pinze, costituite da bronzo dotato di una resistività
molto più bassa, raggiunge valori più bassi e tali da non creare nessun problema per il
superamento della prova.
Dati i risultati della prova il sezionatore è in grado di sopportare una corrente
nominale di 5000 per 1 s, per valutare la bontà del modello si inoltre effettuata una
prova con una corrente nominale pari a 3680 A per 1 s per valutare la differenza di
risultati tra la prova pratica effettuata in SPII e il modello in Comsol.
Per la misura della temperatura della lama si è utilizzata una termocoppia, data però
la velocità del fenomeno non si possono garantire misurazioni con un errore molto
piccolo, questo è dovuto alla elevata costante di tempo nella risposta della
termocoppia confrontata con la velocità del fenomeno.
I risultati sono molto simili, questo dimostra la bontà del modello creato in Comsol.
Per concludere la prova è stata superata dal nostro dispositivo.
112
6.Prova di Corto-circuito:
In questo capitolo si vuole analizzare la prova di corto circuito del nostro dispositivo,
il sezionatore di messa a terra Zefiro MT.
Per valutare la prova di corto circuito per questo dispositivo è necessario suddividere
il problema in due sottoproblemi, la prima parte dedicata alla componente termica in
corto-circuito mentre la seconda parte è dedicata agli sforzi elettrodinamici del nostro
dispositivo.
Il sezionatore deve essere in grado di sopportare, secondo le norme, una corrente di
corto circuito pari a 12.5 kA per 250 ms.
Anche in questo caso, essendo essenziale la deformazione della pinza data
dall'ingresso della lama nel contatto elettrico, viene ancora considerata la parte
meccanica.
Lo scopo della simulazione è quella di mostrare che il componente sia in grado di
sopportare tale prova che verrà effettuata presso i laboratori del CESI di Milano.
Per la prova di corto-circuito è necessario considerare interamente il sezionatore,
quindi considerare tutti i contatti elettrici, tutte le lame e tutte le pinze, sono stati
eliminate le parti in cui non scorre corrente e le parti isolanti in quanto non essenziali
ne alla valutazione degli sforzi elettrodinamici, ne alla valutazione delle
sovratemperature dei componenti attivi del sezionatori. In questo tipo di analisi, il
modello FEM considera solo i componenti metallici che partecipano alla conduzione
della corrente all'interno del dispositivo.
113
Figura 129: Immagine 3D del Sezionatore di Zefiro MT (Inventor).
Figura 130: Particolare del Sezionatore di Zefiro MT, lama e pinze ed albero.
114
Figura 131: Sezionatore di Zefiro MT soggetto al nostro studio.
Figura 132: Modello usato in Comsol.
115
In generale sia nel modello termico che nel modello in corto circuito si è utilizzata la
seguente idea di mesh:
-per le pinze e le lame del sezionatore si è utilizzata una mesh costituita da elementi
tetraedrici con lato minore che le restanti parti del sezionatore, questo perché si vuole
migliorare i risultati in queste parti del sezionatore di cui si è maggiormente
interessati a valutarne le caratteristiche.
Figura 133: Mesh usata per il contatto elettrico.
-per quanto riguarda l'aria circostante il contato elettrico si è utilizzata una mesh
tetraedrica con elementi costituiti da un lato maggiore che nel caso precedente in
modo da ridurre i gradi di libertà e guadagnare in termini di tempo di calcolo, inoltre
queste parti non hanno un interesse particolare quindi non si è pensato di appesantire
il modello già sofisticato e complicato dalla parte meccanica.
116
Figura 134: Mesh usata per simulare il comportamento dell'aria.
Per simulare il nostro problema si è pensato di risolvere la parte meccanica del
problema in regime stazionario in funzione di un parametro, questo consente di
limitare i tempi di calcolo e non considerare derivate temporali durante la soluzione
del problema, per valori da 0 a 0.9 del parametro viene risolta la parte meccanica del
problema, per il valore 1 del parametro si risolve la componente elettrodinamica del
problema, quindi il calcolo delle forze agenti sul contatto elettrico.
6.1 Modello analitico:
Prima di procedere con l'analisi FEM tramite il software Comsol per il calcolo della
temperatura e delle forze elettrodinamiche in gioco durante il corto circuito è
necessario costruirsi un modello molto semplice del sistema per rendersi conto
dell'ordine di grandezza delle forze in gioco e avere così la possibilità di valutare se i
risultati ottenuti tramite l'analisi numerica siano veritieri.
L'analisi viene effettuata considerando la pinza come se fosse costituita da tanti filetti
di corrente, si è ipotizzato quindi il verso della corrente.
117
Inoltre non si considerano i filetti di corrente perpendicolari alla pinza che nel
modello non danno nessun tipo di contributo, questa è sicuramente una
approssimazione che comporterà l'introduzione di errori relativamente grandi, ma il
modello è solo utile per avere una idea generale sull'ordine di grandezza delle forze in
gioco e per capire come agisce il fenomeno così da poter avere più garanzie per un
confronto con i risultati della simulazione numerica.
A
I_2
B
C
I_1
D
F
I_3
G
I_4
I
H
Figura 135: Schema semplificato di una delle pinze del Sezionatore di Zefiro MT.
I_cc=50 kA
I_1=I_2=I_3=I_4 =
=12.5 kA
AB
CD
FG
HI
44 mm
29 mm
29 mm
44 mm
Figura 136: Dati geometrici della pinza.
r_12=r_21
r_13=r_31
r_14=r_41
r_24=r_42
r_23=r_32
6 mm
5 mm
11 mm
17 mm
11 mm
Figura 137: Distanza tra i vari filetti di corrente.
118
-r è la distanza tra i filetti di corrente che costituiscono il modello semplificato della
pinza, mentre:
Fn =InLnB :
B=
:
-Forza totale sul filetto 1:
F_4,1
F_2,1
F_tot 1
C
I_1
D
F_3,1
Figura 138: Forze in gioco su una della dita della pinza
F_4,1
F_2,1
F_3,1
F_tot 1
82.39 N
151.04 N
181.25 N
52.18 N
Figura 139: Valori delle singole forze e della risultante.
La forza risultante tende quindi ad aprire il contatto in caso di corto circuito, questo è
sicuramente un problema che può causare l'esplosione del dispositivo in quanto se
avviene il distacco della lama dal contatto si viene a generare l'arco elettrico, questo
porta alla distruzione del contatto e quindi alla messa in fuori servizio del dispositivo
e questo può generare situazioni di pericolo sia per persone che per le cose. Questa
situazione è da evitare in ogni caso. In generale la cosa che più è importante è il fatto
di mantenere la continuità del circuito in caso di corto circuito, questo garantisce di
non generare l'arco elettrico e salvaguardare il contatto.
119
-Forza totale sul filetto 2:
F_1,2
F_3,2
F_tot 2
A
I_2
B
F_4,2
Figura 140: Forze in gioco su una delle dita della pinza.
F_4,2
F_3,2
F_1,2
F_tot 2
80.9 N
125 N
229.17 N
273.27 N
Figura 141: Valori delle singole forze e della risultante.
6.2 Analisi FEM:
6.2.1 Componente termica:
In questa fase non è necessario considerare l'aria circostante il sezionatore in quanto
siamo interessati a calcolare la temperatura a cui si portano le varie parti del
sezionatore in cui scorre corrente, in sostanza si ripropone l'analisi effettuata per la
prova di tenuta giù utilizzata nel capitolo precedente, sostanzialmente ciò che varia è
il valore nominale della corrente, che in questo caso è pari a 12.5 kA e il tempo in cui
scorre questa corrente che è pari a 250 ms.
120
Figura 142: Gradino di corrente in ingresso.
Figura 143: Temperatura Pinza sopra.
121
Figura 144: Temperatura Pinza sotto.
Figura 145: Temperatura Lama.
122
Figura 146: Temperatura Piastra sopra.
L'oggetto preso in considerazione non ha problemi per il superamento della prova.
6.2.2 Componenti elettromagnetica:
Lo scopo principale è riuscire a capire se in caso di corto circuito il dispositivo riesce
a sopportare gli sforzi elettrodinamici, questa è dovuto alle forze elettromagnetiche
che si vengono a generare sui contatti elettrici, perché in caso di apertura dei contatti
grazie a queste forze si genera l'arco elettrico, una volta innescato questo fenomeno si
ha la distruzione dei contatti del sezionatore e quindi il fuori servizio del dispositivo,
in generale il componente deve garantire che i contatti rimangano in contatto elettrico
per superare la prova di corto-circuito.
Per simulare il comportamento elettrodinamico del dispositivo è necessario
considerare l'aria circostante e quindi è necessario creare una mesh opportuna. Si è
deciso di simulare la zona circostante l'aria costruendo una sfera intorno al
dispositivo:
123
Figura 147: Sfera per la simulazione dell'aria circostante il sezionatore.
Su questa sfera viene quindi costruita la nostra mesh che identifica il comportamento
magnetico dell'aria.
Per quanto riguarda la superficie esterna della sfera si è effettuata la simulazione in
due casi, nel primo caso ipotizzando che il campo magnetico fosse nullo sulla
superficie della sfera, questo introduce una certa approssimazione nei risultati, questo
dipende ovviamente dalle dimensioni della sfera usata per costruire la meshatura
dell'aria. Nel secondo caso si è pensato di utilizzare un dominio ad elementi infiniti
sulla superficie, ciò significa considerare che la superficie della sfera non sia
caratterizzata da campo magnetico nullo, ma da una componente del potenziale
magnetico vettore tangenziale nulla. Semplicemente questo fa si che l'andamento che
segue il potenziale magnetico vettore sia di tipo decrescente in funzione della
distanza dalle sorgenti di campo magnetico, cioè i contatti del sezionatore e le
componenti in cui scorre la corrente di corto circuito.
I risultati mostreranno come sia abbastanza indifferente considerare il campo
magnetico nulla sulla superficie della sfera.
124
Prima di procedere con la simulazione tramite il software multi-fisico Comsol 4.3, si
è considerato uno schema 2D di uno dei contatti per effettuare una conto della forza
elettromagnetica che agirà sul contatto per valutare se i risultati estratti dal pc
avessero un significato fisico.
Chiaramente la precisione dei calcoli sotto riportati è molto bassa, questo è dovuto al
fatto che non vengono considerati gli altri conduttori circostanti alla zona dei contatti,
così come non sono considerati gli effetti dovuti all'andamento, ai bordi
dell'elemento, non rettilineo dei fletti di corrente. Inoltre, la geometria è fortemente
schematizzata schematizzata e questo permette di non considerare le componenti
perpendicolare del campo per il calcolo della forza agente sul contatto.
Per il calcolo della forza si è utilizzata la seguente formula:
=
[N/m]
Si ricavano le seguenti forza sui vari contatti:
6.3 Risultati:
Figura 148: Forza agente sulla pinza sopra.
Figura 149: Forza agente sulla pinza sotto.
Come ipotizzato i risultati del modelli analitico semplificato sono diversi dai risultati
del modello numerico sviluppato tramite l'analisi FEM. L'approssimazione di
considerare nullo sulla superficie della sfera il campo magnetico non comporta una
sensibile differenza tra i risultati ma semplifica il calcolo e lo rende più veloce.
Per concludere per migliorare ulteriormente i risultati è necessario:
125
Rimuovere l'approssimazione di campo magnetico nullo sulla superficie
della sfera.
Considerare una sfera di raggio maggiore per la simulazione dell'aria.
Utilizzare una mesh con elementi tetraedrici di lato minore.
I risultati sono comunque da considerarsi veritieri, in quanto, le possibili migliorie
elencate in precedenza non comportano una riduzione tale del'errore da far
considerare i risultati ottenuti come sbagliati. Le approssimazione che sono state
introdotte hanno quindi comportato solo un risparmio di tempo di calcolo e non
hanno portato a risultati non veritieri.
126
7.I sezionatori nel ferroviario:
7.1 Alimentazione delle linee a corrente continua:
Distribuzione delle sottostazioni:
I trasporti pubblici urbani, per i quali si impiega di regola la trazione a corrente
continua a bassa tensione (600 V o 700 V). in qualche caso 1500 V, si sviluppano in
un territorio di limitate dimensioni, dove le stazioni della rete industriale sono
numerose e di potenza sufficiente ad alimentare gli impianti di trazione. Si ha quindi
una estensione ridotta delle linee primarie che alimentano le sottostazioni di
conversione (SSE) a tensioni non superiori, di solito, ai 20-30 kV, con vantaggi
economici per le primarie stesse, le apparecchiature ad alta tensione e i trasformatori
stessi. La distanza media Lm fra le sottostazioni è molto limitata, per esempio in una
metropolitana a 750 V a forte traffico può essere dell'ordine di 1.5 km, con valori
minimi di 1.3 km.
Le SSE ferroviarie sono distribuite lungo le linee, a distanze dipendenti,
principalmente, dal valore della tensione UL , oltre che dall'intensità del traffico.
Nel sistema a 3 kV venivano un tempo adottati valori di L m di 35-45 km ed oltre, ma
l'incremento della potenza assorbita nelle linee principali porta attualmente a ridurre
tale distanza a non più di 20-30 km. Nei tratti più impegnativi delle linee di valico,
dove per i treni merci molto pesanti si ricorre alla doppia ed anche alla tripla trazione,
come pure nelle tratte ad alta velocità si deve ridurre la distanza media L m a 15-20
km, incrementando inoltre la potenza specifica Ps installata, intesa come rapporto
della potenza totale nominale dei gruppi della SSE e lo sviluppo della linea.
Per le reti a 1.5 kV la distanza media Lm un tempo di 12-20 km, è oggi di non più di
6-8 km, nelle linee a forte traffico.
Sottostazioni di conversione:
127
Figura 150: Schema elettrico di una SSE
I gruppi di conversione delle sottostazioni hanno subito nel corso dei decenni
notevoli progressi per quanto riguarda prestazioni, rendimento, manutenzione e
affidabilità. Nelle prime elettrificazioni furono usati convertitori rotanti, via via
vennero invece introdotti i raddrizzatori a vapore di mercurio. In tal modo fu
possibile realizzare, ove necessario, sottostazioni a funzionamento completamente
automatico, quindi non presidiate, con telecomando e telecontrollo delle sottostazioni
principali.
Un ulteriore importante passo avanti fu l'introduzione, a partire dagli anni Sessanta,
dei raddrizzatori al silicio, non soltanto in tutte le nuove costruzioni, ma
progressivamente in sostituzione di quelli al vapore di mercurio.
Lo schema di principio di una sottostazione con raddrizzatori al silicio è
rappresentato in figura, che si riferisce al caso di una ferrovia elettrificata con filo di
contatto aereo oppure con terza rotaia, il ritorno avviene attraverso il binario.
128
La sottostazione comprende:
le linee primarie trifasi ad alta tensione in arrivo
le sbarre trifasi AT di arrivo
i gruppi di conversione, protetti singolarmente da interruttori tripolari AT di
gruppo
le sbarre a corrente continua delle quali, nel caso considerato, quella negativa è
collegata alle rotaie di corsa, cioè è a massa.
gli alimentatori positivi, che collegano la sbarra positiva alla linea di contatto
I gruppi di conversione sono costituiti a loro volta da:
un trasformatore trifase che ha il compito d abbassare la tensione in relazione
al valore della tensione continua Ud
un raddrizzatore costituito da diodi al silicio collegati a ponte trifase e montati
in armadi. A volte può essere conveniente suddividere il raddrizzatore in due
ponti trifase, in tal caso il trasformatore ha due avvolgimenti secondari, uno per
ciascun ponte.
Gli alimentatori positivi sono protetti da interruttori extrarapidi, che intervengono in
caso di corto circuiti della linea.
Le sottostazioni che alimentano linee filoviarie hanno alimentatori positivi e negativi,
sia i sezionatori che gli interruttori di linea possono essere bipolari. Un caso analogo
è rappresentato dalle metropolitane con terza e quarta rotaia, entrambe isolate.
La sottostazione è formata in sostanza, da una sezione ad alta tensione, comprendente
le linee primarie, le sbarre trifasi AT, gli interruttori ed i sezionatori tripolari dei
gruppi di conversione, i trasformatori, e da una sezione a corrente continua, a
tensione nominale UL, formata dai raddrizzatori, dagli extrarapidi, alimentatori e dai
sezionatori a C.C. La sezione AT è di regola installata all'aperto: può assumere una
consistenza considerevole, quando la SSE, ubicata in un nodo importante, adempie le
funzioni di stazione di smistamento fra due o più primarie provenienti da varie
direzioni, o anche di trasformazione, se le primarie sono, insieme ai quadri di
controllo e comando, fatta eccezione dei sezionatori delle linee a C.C. uscenti.
129
Alimentazione delle sottostazioni:
Figura 151: Connessione tra linee primarie ed SSE
Il collegamento della SSE alla rete industriale trifase ad alta tensione viene attuato
secondo una molteplicità di schemi dipendenti dalla esigenze del servizio e dalle
condizioni locali. In primo luogo si può avere:
l'alimentazione diretta della SSE da una stazione della rete industriale, situata
nelle vicinanze
oppure l'alimentazione di un gruppo di SSE mediane apposite linee primarie
AT disposte nelle vicinanze del tracciato ferroviario e connesse, in uno o più
punti, a stazione della rete industriale
oppure un'alimentazione mista, da stazioni della rete industriale e da primarie
proveniente da altre SSE
Nel primo caso l'alimentazione si considera ''in derivazione'' rispetto alla stazione
della rete AT, ed è realizzata collegando quest'ultima alla SSE con una breve linea
primaria, di pertinenza dell'impianto di trazione. Anche nel secondo caso si può avere
130
un collegamento ''in derivazione'' rispetto alla linea primaria passante, la derivazione
fa capo direttamente al sistema di sbarre trifasi della SSE, con l'inserzione di semplici
sezionatori, apribili a vuoto, per esigenze di manutenzione. Rispetto alle primarie,
una SSE può risultare ''in serie'', quando il collegamento segue lo schema, in questo
caso la primaria è interrotta e, attraverso interruttori tripolari di linea, fa capo alle
sbarre AT della SSE. Nella figura è rappresentato un esempio d'inserzione,
nell'ipotesi che si abbia una doppia terna di sbarre AT.
Ridondanze:
Figura 152: Collegamento in cascata
131
Figura 153: Ridondanze
Figura 154: Ridondanza della linea primaria
132
Tensioni d'alimentazione e distribuzione dei gruppi:
Nella rete FS le tensioni trifasi normali adottate sono, ad esempio, di 66,132,150 kV,
per i gruppi di conversione la tagli unificata è di 3.6 MW e 5.4 MW. Le esigenze di
continuità dell'esercizio richiedono almeno due gruppi per SSE, nei nodi più
importanti e nei tratti di valico si posso avere sottostazioni con tre ed anche quattro
gruppi. In qualche caso si ammettono SSE con un solo gruppo, senza assicurare,
quindi, la continuità del servizio. Le amministrazioni prevedono anche le cosiddette
sottostazioni ambulanti (SSA), montate su uno o due carri speciali, trasferibili in caso
di necessità o di emergenza ed in breve tempo in una SSE fissa, dove sia predisposta
un'apposita postazione, collegata da un lato alle sbarre AT di arrivo e, dall'altro, alle
sbarre a C.C. di partenza.
Alimentazione delle linee di contatto:
Figura 155: Alimentazione della linea di contatto
Il circuito di linea, costituito in ferrovia dalla linea di contatto e dalle rotaie, è
suddiviso per ragione d'esercizio, manutenzione e protezione in tanto tronchi,
133
alimentabili e separabili mediante interruttori e sezionatori. Significativi sono i
tronchi che possono essere cosi denominati:
settori, alimentati ad uno o entrambi gli estremi da interruttori automatici di
protezione
sezione elementari, separabili da quelle contigue con semplici sezionatori a
comando manuale o a distanza, oppure con interruttori telecomandati, ma non
ad apertura automatica
Un settore compreso fra due SSE è alimentato normalmente da entrambe le SSE
(alimentazione bilaterale): si vedano, ad esempio, i tratti AB, BC, CD, EF, della
figura. In questo caso la corrente I assorbita da u mezzo di trazione si ripartisce fra le
due SSE limitrofe A e B, che erogano, rispettivamente, le correnti Ia e Ib , essendo:
I=Ia+Ib
Si ha invece alimentazione a sbalzo quando il settore è alimentato ad una sola
estremità, il tratto di circuito compreso fra la SSE ed il punto di prelievo è percorso
dall'intera corrente I. Il settore AB, alimentato ai due interruttori estremi o ad un solo
estremo, dev'essere protetto nei punti di alimentazione da interruttori extrarapidi detti
alimentatori, ubicati nella SSE. Come si nota dalle figure i settori limitrofi sono tra
loro separati elettricamente da sezionamenti a spazio d'aria, ottenuti per
distanziamento dei fili.
Per esigenze di manutenzione e di continuità del servizio, a metà d'un tronco ad
alimentazione bilaterale, se la lunghezza L è notevole, può essere previsto un posto di
sezionamento, che consente di porre fuori servizio metà tratta, lasciando l'altra metà
alimentata a sbalzo. Nelle linee a doppio binario, specialmente nel sistema ferroviario
a 1.5 kV, nel posto di sezionamento intermedio può inoltre essere prevista la messa in
parallelo dei due binari, per contenere le cadute di tensione. Nei posto di
sezionamento e messa in parallelo vengono usati interruttori automatici direzionali.
Se un settore è alimentato ai due estremi, in caso di guasto interno debbono
intervenire entrambi gli interruttori automatici di protezione, isolandolo.
134
Per facilitare la manutenzione, le stazioni ferroviarie sono sezionabili rispetto alla
piena linea; è comunque sempre assicurata la continuità fra le tratte a monte e a valle
delle stazioni.
7.2 Alimentazione delle linee in corrente alternata, 2x25 kV:
Descrizione del sistema:
Poiché nell'alimentazione di linee molto potenti, come per esempio le linee ad alta
velocità, o quelle a fortissimo traffico si impiegano potenze specifiche molto elevate
di circa 1-2 MW/km, si deve far fronte a cosi molti elevati, dovuti alla connessione
con reti molto potenti in alta tensione e al costo delle linee primarie. Il coso di tali
linee primarie, ai livelli di tensione che entrano in considerazione, incide
pesantemente sul costo totale degli impianti, per cui si cerca di minimizzare lo
sviluppo delle primarie. Nasce qui l'esigenza di distanziare le SSE, fino a trovare
localizzazioni ce ne consentano l'allacciamento diretto a linee trifasi o nodi ubicati
nelle immediate vicinanze, le soluzioni sono chiaramente legate alla configurazione
generale della rete nella zona interessata.
Figura 156: Distribuzione delle corrente nel sistema a 2x25 kV
135
Il sistema 2x25 kV viene utilizzato come sistema di alimentazione dell'alta velocità
italiana.
Figura 157: Interconnessione sistema a 2x25 kV
Lo schema di principio è rappresentato in figura, il trasformatore TP della
sottostazione, che alimenta a sbalzo uno o più settori di linea, ha l'avvolgimento
secondario con una tensione pari a 50 kV, con presa centrale 0 collegata al binario.
Un morsetto, alla tensione U=25 kV alimenta la linea di contatto C, l'altro morsetto, a
tensione U'=-U in opposizione di fase, è collegato ad un alimentatore negativo F, che
corre lungo la linea ferroviaria ed è montato sui pali di sostegno della catenaria, a
breve distanza da questa: la reattanza del circuito CF è quindi ridotta.
In linea sono installati autotrasformatori a 50 kV con presa centrale, ad una distanza
media La dell'ordine di 10-15 km. Essi assicurano la distribuzione fra catenaria ed
alimentatore negativo della corrente I assorbita dal mezzo di trazione M, che come di
consueto è alimentato a 25 KV attraverso la linea aerea ed il binario; la ripartizione
della corrente I fra i due autotrasformatori T1 e T2 dipende dalla posizione di M.
Fra la sottostazione e gli autotrasformatori T1 e T2 la potenza viene trasmessa alla
tensione di 50 kV dai conduttori C ed F, senza interessare il binario: nel tratto TP-T1
questo è privo di corrente.
136
In figura è indicata la ripartizione orientativa della corrente I, in valori relativi,
nell'ipotesi che M si trovi a metà della sezione T1-T2.
Caratteristiche del sistema a 2x25 kV:
L'impedenza di linea è sensibilmente minore di quella di una classica linea, grazie
alla presenza dell'alimentatore negativo: la riduzione è dell'ordine del 40 %.
Il sistema presenta i seguenti notevoli vantaggi:
minori cadute di tensione, grazie alla minore impedenza di linea ed alla
riduzione delle correnti nella catenaria e nell'alimentatore, fuori della sezione
di prelievo. Ciò consente di raggiungere quelle notevoli distanze fra le SSE di
cui si è parlato precedentemente.
minori f.e.m. indotte. Tale riduzione è di grande importanza ai fin d'un minore
inquinamento elettromagnetico, che costituisce un aspetto negativo dei
sistemai a corrente alternata monofase in generale e di quello a 50 Hz in
particolare.
Di contro, il sistema è più complesso e costoso, l'aumento dei costi è dell'ordine del
20 % rispetto al normale sistema di alimentazione a 25 kV.
POC:
Figura 158: Punto di origine della catenaria
137
Effettiva distribuzione delle correnti:
Figura 159: Effettiva distribuzione delle correnti nel sistema a 2x25 kV
La reale distribuzione delle correnti in un sistema 2x25 kV dipende dall'impedenza
tra i diversi conduttori, quindi l'auto impedenza di ogni conduttore e la mutua
impedenza del conduttore rispetto gli altri.
Si può dire che la reale distribuzione della corrente in un sistema a 2x25 kV sia la
sovrapposizione di due sistemi:
138
il sistema a 2x25 kV
il sistema a 25 kV
La ripartizione effettiva dipende da due parametri: α e C, la prevalenza di uno dei due
sistemi sull'altro dipende dal valori di questi parametri, più α si avvicina a 0.5 e α a 1
il sistema si può dire che sia un sistema a 2x25 kV ideale, più ci allontaniamo da
questi valori più si fa sentire la componente del sistema a 25 kV e ci allontaniamo
dall'idealità del sistema e si perdono i vantaggi di cui abbiamo parlato prima.
Figura 160: Sistema 2x25 kV ac reale.
7.3 Circuito di trazione in corrente continua:
Il circuito principale dei mezzi di trazione, percorso dalla corrente dei motori e
comprendente le apparecchiature necessarie per assicurarne il funzionamento nelle
diverse condizioni di marcia, è denominato circuito di trazione. Nei mezzi a corrente
continua
di tipo tradizionale esso comprende essenzialmente, oltre ai motori,
139
apparecchiature di tipo elettromeccanico; negli azionamenti elettronici si hanno
inoltre, oltre ad un certo numero di apparecchi elettromeccanici, uno o più
convertitori elettronici di potenza.
I componenti del circuito di trazione debbono, in ogni caso, assolvere le seguenti
funzioni:
captazione della corrente
inversione del senso di marcia
avviamento
regolazione della velocità dei motori
frenatura elettrica
protezione
Il circuito di trazione può assumere diverse configurazioni, ciascuna delle quali
corrisponde a determinate condizioni di funzionamento dei motori.
Sistemi di comando:
Per passare da una posizione all'altra, è necessario stabilire o interrompere un certo
numero di collegamenti, nei diversi punti del circuito, mediante opportuni apparecchi.
Il comando di tali apparecchi può essere diretto o indiretto.
1) Comando diretto: agisce direttamente o attraverso una trasmissione meccanica
sull'apparecchio. Viene attualmente usato solo per alcuni comandi e con particolari
modalità di funzionamento, oppure nel caso in cui le tensioni e le potenze in gioco
siano ridotte e gli organi da comandare direttamente accessibili.
2)Comando indiretto: l'operatore provoca la chiusura o l'apertura di circuiti di
comando, alimentati in corrente continua a bassa tensione (fino a 100-110 V), i quali
a loro volta agiscono sui dispositivi d'azionamento degli apparecchi, che possono
essere costituiti da:
140
un solenoide, la cui bobina è alimentata direttamente dai circuiti di comando.
Si ha in questo caso un comando elettromagnetico
un servomotore pneumatico, spesso consistente in un semplice cilindro. L'aria
compressa necessaria per il funzionamento del servomotore è prelevata dai
serbatoi esistenti a bordo; l'immissione e lo scarico vengono effettuati mediante
valvole elettro-pneumatiche, alimentate da circuito di comando
un motore elettrico, alimentato dal circuito di comando
Il comando elettropneumatico:
Il comando elettropneumatico è spesso usato, in quanto ha il pregio di utilizzare un
servomotore di elevate prestazioni, con ingombro e peso relativamente ridotti. L'aria
compressa è prelevata dall'impianto pneumatico esistente a bordo del veicolo
destinato essenzialmente al funzionamento del freno pneumatico; la pressione è
normalmente dell'ordine di 500-900 kPa. L'operatore, mediante un circuito di
comando, controlla l'alimentazione della bobina d'una valvola elettropneumatica, che
ha il compito di inviare aria compressa al servomotore d'azionamento
dell'apparecchio o metterlo allo scarico.
L'elettrovalvola comprende tre camere: quella centrale comunica con il servomotore,
le altre due con la condotta di pressione l'atmosfera. La comunicazione tra le camere
è controllata da due valvole, il cui stelo è collegato al nucleo della bobina di
comando.
Una molla agisce sullo stelo, determinando la chiusura di una delle due valvole e
l'apertura dell'altra. La bobina, eccitata, attira il nucleo, vincendo l'azione della molla
e determina l'inversione delle posizioni delle due valvole.
Nelle elettrovalvole denominate di pressione il funzionamento avviene nel seguente
modo:
141
quando la bobina (3) è diseccitata, il servomotore comunica attraverso la
valvola (1) con l'atmosfera; la valvola (2) intercetta la condotta dell'aria
compressa
quando la bobina (3) è eccitata, la valvola (1) si chiude e la (2) si apre,
inviando aria compressa al servomotore.
Queste elettrovalvole alimentano quindi il servomotore solo se sono eccitate.
Viceversa, nelle elettrovalvole denominate di scarico,l'alimentazione della bobina di
comando determina lo scarico del servomotore, che è normalmente in pressione a
bobina diseccitata.
Contattori e Sezionatori:
La funzione degli apparecchi necessari per realizzare le diverse posizioni di marcia è
quella di determinare l'apertura o la chiusura di un certo numero di collegamenti nel
circuito di trazione: essendo questo a corrente continua, gli apparecchi sono unipolari
e comprendono essenzialmente una coppia di contatti, uno fiso e uno mobile. Detti
apparecchi possono assumere costruttivamente forme diverse, in relazione al sistema
di comando e a seconda che debbano essere manovrati sotto carico o a vuoto.
Nel primo l'apparecchio viene denominato contattore, nel secondo caso su ha un
semplice sezionatore, che non deve mai interrompere corrente ed è quindi
costruttivamente più semplice.
Contattori:
Un contattore è chiamato ad interrompere la corrente normale di funzionamento dei
motori, cioè, al massimo quella di avviamento. Nella versione unipolare, il contato
mobile 2 è premuto, in posizione di chiusura, contro quello fisso 1, mediante
un'apposita molla.
Quando all'atto di apertura del circuito, il contatto mobile abbandona quello fisso si
forma un arco, che deve essere estinto tempestivamente. Si ricorre a tale scopo al
soffio magnetico, producendo un campo normale alla direzione di movimento del
142
contatto mobile, e quindi al percorso dell'arco. Quest'ultimo è soggetto ad una forza
f=Bli, che tende a spostarlo verso l'esterno, così facendo l'arco si allunga e si
raffredda fino ad estinguersi.
La forza magnetomotrice che determina il campo d'estinzione è prodotta da una
bobina di soffio 3, percorsa dalla corrente i, in serie quindi al contatto. Il nucleo
magnetico del solenoide (3) è provvisto di due espansioni polari (4) e determina
un'appropriata distribuzione dell'induzione B, nella zona in cui avviene l'estinzione
dell'arco. Si deve notare come se anche si inverta il segno della corrente, il soffio
mantenga la sua direzione infatti nella formula cambiano segno contemporaneamente
sia i che B.
Sezionatori:
Come nei contattori, in un sezionatore la distanza d tra i contatti, in posizione di
apertura, è correlata alla tensione massima Um, la pressione F fra i contatti chiusi e la
loro superficie alla corrente massima Im. La differenza sostanziale è che non si
richiede qui alcuna capacità di interruzione, per cui non occorre ricorrere al soffio
magnetico, come avviene nel caso dei contattori.
I sezionatori del circuito di trazione devono adempiono essenzialmente alle seguenti
funzioni:
1. sezionamento delle prese di corrente a pantografo, nelle locomotive e nelle
elettromotrici ferroviarie. In questo caso i sezionatori sono installati sul tetto e
comandati normalmente a mano, mediante un fioretto.
2. messa terra dei circuiti ad alta tensione (AT), quando occorre accedere per
ispezione o manutenzione al circuito di trazione. A tale scopo si prevede un
sistema di serrature meccaniche per tutti i locali, armadi o cassoni contenenti le
apparecchiature AT: l'apertura delle serrature, mediante appositi chiavi, è
possibile solo a pantografi abbassati e presuppone la messa a terra dei cavi di
alimentazione AT.
143
3. esclusione di uno o più motori di trazione, in caso di guasto, in modo da
consentire la prosecuzione della marcia, sia pure a potenza ridotta e con
procedure d'emergenza. I sezionatori d'esclusione vengono di solito
raggruppati tra loro e costituiscono in tal caso un combinatore a diverse
posizioni, denominato escluditore o inseritore: è tipico, per un azionamento a
quattro motori di trazione alimentati a metà tensione, prevedere tre posizioni:
tutti i motori inseriti (posizione normale); esclusa la prima coppia di motori;
esclusa la seconda coppia di motori. Questo apparecchio può essere comandato
a mano oppure tramite telecomando. In questo ultimo caso ha di solito un
comando elettropneumatico.
4. l'inversione di marcia
7.4 Alimentazione bifrequenza:
In campo ferroviario consideriamo alimentazione bifrequenza a 25 kV, 50 Hz ed a 15
kV, 16 2/3 Hz, adottata per locomotive a raddrizzatori impiegate, ad esempio, nel
traffico internazione tra Francia e Germania/Svizzera.
Gli adattamenti riguardano essenzialmente il trasformatore principale; supponiamo
che esso debba fornire la medesima potenza apparente A e la medesima tensione
secondaria U2 con entrambi i sistemi di alimentazione. Se il trasformatore ha un
unico avvolgimento primario di N1 spire, nel funzionamento con alimentazione:
U1'=25000 V; f'=50 Hz abbiamo:
corrente primaria:
I1'=A/U1'
tensione per spira (ϕ valore massimo del flusso):
e'=4.44*f'*ϕ'=U1'/N1
Con alimentazione: U1''=15000; f''=50/3 Hz risulta invece:
corrente primaria:
144
I1''=A/U1''=I1'*U1'/U1''=I1'*25000/15000
I1''/I1'=5/3=1.67
tensione per spira:
e''=3/5*e'
flusso:
ϕ''/ ϕ'=9/5
A causa dell'alimentazione a 16 2/3 Hz, il circuito magnetico deve essere quindi
dimensionato per un flusso dell'80% maggiore e l'avvolgimento primario per una
corrente del 67% maggiore di quanto è necessario nel funzionamento a 50 Hz.
Consideriamo ora il numero di spire secondarie N2 necessarie per ottenere il
medesimo valore U2':
alimentazione a 25000 V:
N2'=U2/e'
alimentazione a 15000 V:
N2'/N2''=0.6
Il secondario deve avere perciò N2'' spire, con una presa intermedia in corrispondenza
del 60% di tali spire per il funzionamento a 25 kV.
Il sistema comprende le apparecchiature elettromeccaniche di commutazione: esso è
stato adottato, limitatamente a quanto concerne l'alimentazione a corrente alternata.
In altri casi si è preferito, per ridurre l'incremento di massa del trasformatore,
ammettere nel funzionamento a 15 kV, 16 2/3 Hz, per percorsi limitati, una minore
potenza ed una tensione secondaria U2'' ridotta, a quella ottenibile a 25 kV, 50 Hz.
Poiché a 15 kV il rapporto tra e'' e e' vale 3/5 abbiamo:
U2''=0.6*U2
145
7.5 Mezzi di trazione con motore a collettore:
Figura 161: Schema elettrico di trazione con motore a collettore: M=monofase; C=c.c; TS=tiristore per l'indebolimento di
campo; DS=diodo di blocco; R=resistore di scarica; K=sezionatore c.c./c.a.; X=alimentazione con motore 2.
I casi più complessi sono evidentemente quelli di alimentazione policorrente. cioè
c.a. e a c.c. a due o più sistemi.
Per gli azionamenti tradizionali la soluzione più conveniente con alimentazione
quadricorrente, consiste nel prevedere:
un classico equipaggiamento bitensione a contattori e reostato, per
l'avviamento e la regolazione dei motori;
un trasformatore alimentabile alle due frequenze, con raddrizzatore a diodi e
tensione d'uscita: Ud=1500 V.
I motori di trazione sono isolati per 3000 V e funzionano con tensioni ai morsetti di
1500 V e di 750 V, sia a corrente continua che a corrente alternata.
146
Per le soluzioni bicorrente, molto usate in Francia, si è preferito non perdere , sotto
catenaria monofase, i vantaggi della finezza di regolazione consentita dal sistema a
prese sul trasformatore, installando un doppio equipaggiamento costituito da:
un complesso autotraformatore/trasformatore con graduatore AT e due
secondari. Ciascuno di questi alimenta, mediante un ponte monofase a diodi,
un motore di trazione a corrente alternata;
una serie di contattori e reostato per l'alimentazione e la regolazione sotto
catenaria 1500 V dei due motori di trazione.
L'introduzione dei frazionatori ha consentito un notevole miglioramento con entrambi
i sistemi di alimentazione: la regolazione di ciascun motore viene effettuata mediante
un frazionatore, integrato da un dispositivo per la regoalazione continua del campo.
In corrente alternata il trasformatore a rapporto fisso ed un raddrizzatore a diodi
alimenta a tensione Ud circa uguale a 1500 V i frazionatori.
Per avere un sistema di alimentazione multiplo si ha la necessità di riconfigurare il
sistema di trazione a bordo del treno tramite dei sezionatori, nella figura 11
l'elemento K rappresenta il sezionatore che ha questa funzione, cioè quella di fare da
switch tra il sistema di alimentazione in c.a e il sistema di alimentazione in c.c..
147
7.6 Mezzi di trazione con azionamento trifase:
Figura 162: Schema elettrico di trazione di una locomotiva con azionamento trifase.
Il secondo filone di sviluppo dei mezzi policorrente a motori asincroni riguarda
principalmente locomotive alimentate in c.c. alla tensione nominale di 3kV. Sono
elementi caratterizzati di questo indirizzo:
l'adozione di convertitori d'ingresso 4Q per l'alimentazione a c.a., sia a 15 kV
16 2/3 Hz, sia a 50 kV, 50 Hz;
il collegamento in serie dei convertitori sotto l'alimentazione a 3 kV, evitando
la serie diretta dei GTO.
I mezzi di trazione sono destinati i primo luogo ai collegamenti internazioni, tra i
quali rivestono una particolare importanza i valichi alpini tra Italia, Svizzera e
Austria.
Le soluzioni tecniche adottate hanno tutte caratteristiche di modularità e sono basate
sull'impiego dei GTO, con il fine di conseguire:
Elevata potenza installata.
Velocità massime fino a 220/230 km/h.
148
Utilizzazione spinta dell'aderenza, a tal fine è vantaggiosa l'alimentazione e la
regolazione indipendente dei singoli motori di trazione, a valle del circuito
intermedio.
Fattore di potenza pari all'unità in tutto il campo di funzionamento, essenziale
nelle reti a 15 kV, ma vantaggioso anche in quelle a frequenze industriale.
Guardando la figura 12: In c.a. l'invertitore W3L alimenta i due motori M1 e M2 in
parallelo, senza induttori supplementari; manca inoltre il filtro d'ingresso. La tensione
del circuito intermedio è pari a Ud=3500 V.
Con alimentazione a c.c. l'invertitore W3L di ciascun carrello motore funziona come
convertitore monostadio, la tensione applicata al circuito intermedio U d=UL può
variare da 2000 V a 4200 V. A valle dell'interruttore extrarapido IPC il filtro di linea
comprende due induttori LF, uno per ciascun semiazionamento, collegati in serie
al'induttore L2 del ramo risonante in c.a. monofase alla frequenza 2*f1=33.3 Hz. I
convertitori 4Q non vengono quindi utilizzati in c.c.
La frenatura elettrica è a recupero, essendo tutti i convertitori reversibili, e reostatica;
i reostati RF e relativi frazionatori TF sono inseriti fra le sbarre A e K del circuito
intermedio e la sbarra neutra 0.
Figura 163: ETR-500 in configurazione 25kVAC a 50 Hz
149
Ogni avvolgimento del trasformatore alimenta un convertitore 4Q, i due motori MT1
e MT2 sono alimentati da un solo azionamento.
La tensione sul DC bus è minore della tensione della catenaria.
B; filtro LC per la seconda armonica
C; Condensatore in ingresso al DC bus per mantenere costante al tensione nel
DC bus
A; Dispositivo che dissipa l'energia dissipata durante la frenatura
Figura 164: ETR-500 in configurazione 3 kVcc
A; Rappresentano i filtri di linea, sono delle induttanze che non permettono
l'ingresso delle armoniche generate dai ponti nella linea di contatto.
In questa configurazione viene riutilizzato il trasformatore come induttanza per
ridurre gli spazi, già piccoli sul treno.
150
8.Norme CEI:
8.1 CEI EN 50124-1:
L'intero documento tratta il coordinamento degli isolamenti nel settore ferroviario. Il
coordinamento degli isolamenti implica a scelta, il dimensionamento e la correlazione
dell'isolamento sia entro l'apparecchiatura che tra le sue parti. Nel dimensionamento
degli isolamenti sono prese in considerazione sia le sollecitazioni elettriche che le
condizioni ambientali, per condizioni e sollecitazione uguali le dimensioni sono
uguali. Uno degli obbiettivi del coordinamento dell'isolamento è quello di evitare
inutili sovradimensionamenti dei componenti e dell'isolamento stesso.
La norma CEI EN 50124-1 chiarisce:
1) Le distanze in aria e le distanze superficiali per le apparecchiature.
2) Le condizioni generali delle prove relative al coordinamento degli isolamenti.
-Definizioni:
Tensione nominale (Un): Valore di tensione approssimato, appropriato usato per
designare o identificare un dato sistema di alimentazione.
Tensione di lavoro: Il più elevato valore efficace della tensione in corrente alternata o
continua che può apparire tra due punti di un isolamento, essendo possibile che ogni
circuito influenzi detto valore efficace quando è alimentato alla sua tensione
permanente massima.
Tensione assegnata: Il valore di tensione assegnato dal costruttore ad un componente,
dispositivo o apparecchiatura e al quale sono riferite le caratteristiche di
funzionamento e di prestazione.
151
Tensione d'isolamento assegnata (UNm): Un valore di tensione efficace di tenuta
assegnato dal costruttore all'apparecchiatura o a parte di essa, che caratterizza la
capacità specificata di tenuta permanente (oltre cinque minuti) del suo isolamento.
Sovratensioni: Tutte le tensioni che hanno valore di picco superiore al valore di picco
( comprese le sovratensioni ricorrenti) corrispondente alla tensione massima
stazionaria nelle normali condizioni di funzionamento.
Tensione impulsiva assegnata (UNi): Un valore di tensione impulsiva assegnato dal
costruttore all'apparecchiatura o ad una parte di essa, ch caratterizza la capacità di
tenuta specificata dal suo isolamento rispetto sovratensioni transitorie.
Isolamento funzionale: L'isolamento tra due parti conduttrici necessario solo al
corretto funzionamento.
Isolamento di base: L'isolamento applicato a parti attive per ottenere una protezione
di base contro lo shock elettrico.
Isolamento supplementare: Un isolamento indipendente applicato in aggiunta
all'isolamento di base, per ottenere una protezione contro lo shock elettrico nel caso
di guasta dell'isolamento di base.
Doppio isolamento: Un isolamento che comprende sial'isolamento di base che
l'isolamento supplementare.
Isolamento rinforzato: Un sistema di isolamento singolo applicato a parti attive, che
fornisce un grado di protezione contro lo shock elettrico equivalente al doppio
isolamento.
Principi di base del coordinamento:
Coordinamento degli isolamenti con riguardo alla tensione:
152
Il coordinamento dell'isolamento può essere ottenuto solo se il progetto
dell'apparecchiatura è basta sulle sollecitazioni alle quali si prevede che esso sia
soggetto durante la durata di vita prevista.
Bisogna tenere in considerazione:
le tensioni che si possono manifestare nel sistema
le tensione generate dall'apparecchiatura
il grado di disponibilità attesa dell'apparecchiatura
la sicurezza delle persone e dei beni, in modo che la probabilità di incidenti
non desiderati dovuti alle sollecitazioni di tensione non conduca ad un
incettabile rischio di danno
le funzioni di sicurezza per i sistemi di comando e protezione
la forma delle superfici isolanti
l'orientamento e l'ubicazione delle distanze superficiali
Il coordinamento degli isolamenti relativo alle tensione permanenti è basato su:
tensione assegnata
tensione d'isolamento assegnata
tensione di lavoro
Le tensioni permanenti sono quelle tensioni che secondo le norme hanno una durata
maggiore a cinque minuti.
Coordinamento degli isolamenti con riguardo alle condizioni ambientali:
Le condizioni micro ambientali, nei confronti dell'isolamento devono essere tenute in
considerazione secondo la classifica del grado di inquinamento. Le condizioni micro
ambientali dipendono in primo luogo dalle condizioni micro ambientali nelle quali
l'apparecchiatura si trova e in molti casi le sistemazioni ambientali sono identiche.
153
Il micro ambiente determina l'effettivo inquinamento sull'isolamento, possono quindi
essere previsti mezzi per ridurre l'inquinamento dell'isolamento che si considera, con
l'uso efficace di involucri, incapsulamenti o tenute ermetiche. Tali mezzi possono non
essere efficaci quando l'apparecchiatura è soggetta a condensazione o se, nel normale
funzionamento essa stessa genera inquinamento. Piccole distanze in aria possono
essere corto circuitate completamente da particelle solide, polvere e acqua e pertanto
vengono prescritti valori minimi delle distanze in aria quando l'inquinamento può
essere presente nel microambiente.
Al fine di valutare le distanze superficiali e le distanze in aria vengono definiti sette
gradi di inquinamento.
154
Indice comparativo di corrente strisciante:
I materiali isolanti possono essere caratterizzati approssimativamente in base al
danno che subiscono per il rilascio concentrato di energia durante la scarica elettrica
quando una corrente superficiale di dispersione è interrotta per effetto di essicazione
della superficie contaminata. In presenza di scarica elettrica può verificarsi il
seguente comportamento dei materiali isolanti:
decomposizione del materiale
usura con asportazione del materiale isolante per azione delle scariche
elettriche
la formazione progressiva di percorsi conduttivi che vengono prodotti sulla
superficie del materiale isolante solido come conseguenza degli effetti
combinati della sollecitazione elettrica e della contaminazione elettrolitica sulla
superficie
Prescrizioni e regole generali di dimensionamento delle distanze in aria:
Le distanze in aria devono essere dimensionate per sopportare le tensioni a cui le
apparecchiature fanno riferimento.
Può essere adottato un valore minore, in particolare nel caso di campi omogenei, le
distanze ridotte devono sopportare la tensione impulsiva assegnata richiesta UNi.
Prove e misure:
Se richiesto distanze in aria e superficiali devono essere misurate, la prova elettrica
preferita è quella con tensione impulsiva. In alternativa, la distanza in aria può essere
verificata con una prova di tensione a frequenza di rete o una prova a tensione
continua.
La prova a tensione continua è preferita quando le distanze sono corto circuitate da
capacità.
155
La tensione di prova, quando applicabile, deve essere applicata solo sulla sezione
nella quale si deve verificare la distanza in aria. Solo quelle sezioni che hanno la
stessa tensione e le stesse prescrizioni di inquinamento possono rimanere collegate
alle sorgenti della tensione di prova. Le distanze superficiali possono essere verificate
solo mediante misura.
Prescrizioni specifiche per applicazioni nel campo ferroviario:
Prescrizioni specifiche per materiale rotabile:
Per le distanze superficiali devono essere considerati solo i livelli di inquinamento da
PD 1 a PD4.
I valori di distanze minime per un UNm oltre 1000 V possono essere limitate a
20mm/kV se sono previste misure di attenuazione quali l'ingrassaggio e la pulitura
della superficie degli isolatori.
Distanze di isolatori per esterno:
Per isolatori per esterno in installazioni fisse devono essere considerate le seguenti
eccezioni, in quanto le proprietà d'isolamento possono essere influenzate dalle
condizioni atmosferiche circostanti. Il dimensionamento delle distanze superficiali in
funzione della tensione di'isolamento assegnata è la seguente:
condizioni di funzionamento normale: da 24 a 33 mm/kV
condizioni di funzionamento sfavorevoli: da 36 a 40 mm/kV
condizioni di funzionamento estremamente sfavorevoli: >48 mm/kV
Condizioni per prove dielettriche di tipo e individuali per apparecchiature:
Salvo quanto diversamente stabilito e concordato, le prove qui specificate, si
considera che siano eseguite su apparecchiature nuove in condizioni pulite. Le prove
specificate nelle norme di prodotto possono essere più specifiche di quelle qui
indicate, e possono prevedere prove in ambiente inquinato.
156
La prova è eseguita applicando la tensione di prova richiesta tra il circuito (o parti
attive) e altri circuiti, terra, parti metalliche non attive e carpenteria che, per
convenienza, possono essere tutti collegati per le prove.
Quando la prova è eseguita ai terminali esterni dell'apparecchiatura, il valore di prova
è quello dell'isolamento generale dell'apparecchiatura visto da una sorgente esterna.
Durante la prova non devono verificarsi scariche superficiali, cedimento
dell'isolamento o internamente o esternamente o ogni altra manifestazione di scarica
disruptiva. Ogni scarica luminosa deve essere ignorata.
Prova ad impulso:
La prova ad impulso è generalmente una prova di tipo.
La tensione di prova deve essere uguale alla tensione impulsiva assegnata UNi .
Prova a frequenza industriale:
La prova a frequenza di rete è generalmente una prova individuale. La tensione di
prova deve essere raggiunta in 5 s ed essere mantenuta per 10 s, salvo quanto
diversamente specificato in una norma di prodotto.
Prova a tensione continua:
Per la prova a tensione continua, come per la prova a frequenza di rete, il valore di
picco della tensione di prova deve essere uguale al valore di picco della rispettiva
tensione alternata.
8.2 CEI EN 60077-1:
Lo scopo della presente norma è quello, per quanto possibile, di armonizzare tutte le
regole e i requisiti di natura generale applicabili alle apparecchiature elettriche per
materiale rotabile.
157
Definizioni:
Materiale rotabile: Un termine generale che comprende tutti i veicoli con o senza
motori.
Categorie di prove: Una prova di uno o più dispositivi, costruiti su un determinato
progetto, per dimostrare che il progetto risponde a determinate specifiche.
Prove individuali: Una prova alla quale è sottoposto ogni singolo dispositivo durante
o dopo la costruzione per accertare se risponde a determinati criteri.
Prove a campione: Una prova di un gruppo di dispositivi presi casualmente da un
lotto.
Prova di investigazione: Una prova speciale di carattere opzionale eseguita al fine di
ottenere informazioni aggiuntive.
Corrente di esercizio assegnata (IB): La corrente di esercizio assegnata di
un'apparecchiatura è stabilita dal costruttore e tiene conto della tensione di esercizio
assegnata e dalla frequenza di esercizio assegnata.
Corrente di tenuta di breve periodo assegnata (ICW): La corrente di tenuta di breve
periodo assegnata di una apparecchiatura è il valore di corrente di tenuta di breve
periodo assegnata dal costruttore che il dispositivo può portare senza danni, nelle
condizioni di prova specificate nella norma di prodotto corrispondente.
Sovratemperatura:
La sovratemperatura dovuta al funzionamento delle parti dell'apparecchiatura, e
misurata durante una prova eseguita alla corrente assegnata continuativa equivalente
nelle condizioni specificate dalle norme non deve superare i valori stabiliti dalle
seguenti tabelle:
158
159
La determinazione dei limiti di sovratemperatura devono essere basati sulla
temperatura di riferimento Tr=25 °C .
L'aria ambiente deve essere considerata quella che circonda il dispositivo, e sarà
diversa a seconda del luogo dove viene installato il dispositivo.
Materiali isolanti:
La sovratemperatura ottenuta durante le prove non deve procurare danni alle parti che
portano la corrente o a parti adiacenti l'apparecchiatura. In particolare, la temperatura
dei materiali isolanti non deve superare i valori dati dall'indice di temperatura
dell'isolante.
Prestazione funzionale:
L'apparecchiatura deve essere in grado di operare ai carichi assegnati in condizioni
corrispondenti ai requisiti specificati, ove pertinenti.
160
Requisiti specifici e condizioni di prova devono essere stabilite nella corrispondente
norma di prodotto o nella specifica di prova concordata tra il costruttore e
l'utilizzatore e possono riguardare:
la prestazione funzionale a vuoto al fine di dimostrare che l'apparecchiatura
risponde alle condizioni funzionali quando alimentata ai limiti superiori ed
inferiori della tensione di alimentazione e/o della pressione dell'aria specificati
la prestazione funzionale a carico durante la quale l'apparecchiatura deve
funzionare al carico specificato
la prestazione in sovraccarico o nelle condizioni di guasto
la durata meccanica ed elettrica
Genere delle prove:
Le prove devono essere eseguite per comprovare la rispondenza ai requisiti stabiliti in
questa norma, ove applicabili, e nella corrispondente norma di prodotto. Le prove
sono le seguenti:
prove di tipo che devono essere eseguite su un campione rappresentativo
dell'apparecchiatura
prove individuali che devono essere eseguite su ogni singola apparecchiatura
costruita secondo norma, ove applicabile, e la corrispondente norma di
prodotto
prove a campione che devono essere eseguite se richieste nella corrispondente
norma di prodotto
prove di tipo investigativo che sono prove speciali e devono essere eseguite
solo se richieste dal costruttore o dall'utilizzatore per provare con maggiore
dettaglio alcuni particolari aspetti del progetto
Le prove devono essere eseguite dal costruttore nelle proprie sale prova o in
qualunque laboratorio adatto di sua scelta, prima che l'apparecchiatura venga montata
sul veicolo.
161
Prove di tipo:
Le prove di tipo sono previste per verificare la rispondenza del progetto di una data
apparecchiatura alla presente norma, ove applicabile, e alla corrispondente norma di
prodotto.
Queste prove possono comprendere, come appropriato, la verifica di:
a) requisiti costruttivi
b) requisiti di prestazione:
limiti operativi
sovratemperatura
proprietà dielettriche
prestazioni funzionali
vibrazioni ed urti
compatibilità elettromagnetica
emissione di rumore acustico
influenza climatica
La documentazione scritta dalle prove di tipo deve essere resa disponibile da parte del
costruttore.
Se queste prove di tipo comprendono prove di durata meccanica o elettrica o verifica
di prestazioni in sovraccarico o in condizioni di guasto che possono provocare danno,
esse possono essere eseguite su un campione addizionale.
Prove individuali:
Le prove individuali sono previste per rilevare guasti nei materiali o di lavorazione e
per accertare il funzionamento appropriato dell'apparecchiatura. Esse devono essere
eseguite su ogni singola apparecchiatura, comprese quelle parti che devono essere
sottoposte a prove di tipo.
162
Queste prove possono comprendere, come appropriato, la verifica:
visiva
funzionale
del dielettrico
di taratura
di tenuta dell'aria per apparecchiatura elettropneumatica
di tenuta per apparecchiatura idraulica
misura della resistenza e dell'impedenza
Le prove individuali non devono provocare alcun danno.
Prove a campione:
Se la progettazione e le analisi statistiche mostrano che le prove individuali non sono
richieste (per ogni prodotto), in sostituzione possono essere fatte prove a campione,
se così è stabilito nella corrispondente norma di prodotto. Esse devono comprendere
una serie di prove, come per le prove individuali.
Prove di investigazione:
Queste sono prove opzionali che possono essere fatte per verificare proprietà o
caratteristiche particolari dell'equipaggiamento, o per iniziativa del costruttore stesso,
o a seguito di accordo tra costruttore e utilizzatore. L'insuccesso di una prova di tipo
investigativo non deve comportare la non accettazione dell'apparecchiatura.
Condizioni generali di prova:
L'equipaggiamento che deve essere provato deve rispettare i tutti gli aspetti funzionali
il progetto cui esso risponde. Salvo quanto stabilito nella presente norma o nella
corrispondente norma di prodotto:
le prove devono essere eseguite nelle condizioni ambientali esistenti nel posto
di prova
163
ogni serie di prove deve essere eseguita sull'apparecchiatura in condizioni
nuove e pulite
l'apparecchiatura in prova deve essere completamente montata o nelle
condizioni prescritte dal costruttore o nelle condizioni corrispondenti a quelle
d'installazione previste sul materiale rotabile
I risultati di prova devono rientrare nelle tolleranze stabilite nella corrispondente
norma di prodotto.
8.3 CEI EN 60077-2:
Lo scopo della presente norma è quello di adattare le regole generali date nella norma
EN 60077-1 a tutti i componenti elettrotecnici per materiale rotabile, al fine di
ottenere uniformità di requisiti e prove per la gamma corrispondenti di componenti.
I componenti elettrotecnici sono principalmente apparecchiature di manovra e di
comando, indipendentemente dai propri circuiti di comando, e comprendono anche
relè, valvole, fusibili, resistori ecc.
La presente norma stabilisce:
a) Le caratteristiche dei componenti
b) I requisiti costruttivi e funzionali ai quali i componenti devono rispondere
c) Le prove previste per confermare la rispondenza dei componenti a queste
caratteristiche in queste condizioni di servizio, e i metodi da adottare per queste prove
d) Le informazioni da riportare sugli appunti, o fornite con gli apparati
Definizioni:
Componente elettrico attivo: Semplice dispositivo, o assieme di dispositivi, che in
risposta a un segnale di comando esegue una funzione o varie funzioni inseparabili
cambiando il loro stato, purché il comando o la funzione siano elettrici.
164
Componente elettrici passivo: Semplice dispositivo, o assieme di dispositivi, che non
sono compresi nel gruppo dei componenti elettrici attivi compresi nel gruppo ei
componenti elettrici attivi e hanno almeno una funzione elettrica.
Apparecchiatura di manovra e comando: Un termine generale che comprende
apparecchi di manovra e loro combinazioni con associato equipaggiamento di
comando, misura, protezione e regolazione, anche assiemi di tali dispositivi ed
equipaggiamenti con interconnessioni, accessori, involucri e strutture di supporto
associate.
Interruttore: Un apparecchio di manovra meccanico capace di stabilire, portare e
interrompere correnti in condizioni normali di circuito e anche di stabilire, portare per
un tempo specificato e interrompere correnti in condizioni anormali specificate di
circuito quali quelle di cortocircuito.
Contattore (meccanico): Un apparecchio di manovra meccanico che ha solo una
posizione di riposo, azionato in modo diverso da quello manuale, capace di stabilire,
condurre e interrompere correnti in condizioni di circuito normale compreso il
funzionamento in condizioni di sovraccarico.
Sezionatore: Un apparecchio di manovra meccanico che fornisce, in posizione aperta,
una distanza di isolamento in accordo con i requisiti specificati.
Contatto: Parti conduttrici progettate per stabilire la continuità di circuito quando si
toccano e che, a seguito del loro movimento relativo durante un operazione, aprono e
chiudono un circuito o, nel caso di contatti snodati o striscianti, mantengono la
continuità del circuito.
Relè (elettrico): Un dispositivo progettato per produrre rapidi cambiamenti
predeterminati in uno o più circuiti elettrici di uscita quando sono soddisfatte certe
equazioni nei circuiti elettrici di ingresso che comandano l'apparecchio.
165
Funzionamento: Il passaggio del (i) contatto (i) mobile (i) da una posizione a quella
vicina.
Posizione chiusa (di un apparecchio di manovra): La posizione nella quale è
assicurata la continuità predeterminata del circuito principale dell'apparecchio.
Posizione aperta (di un apparecchio di manovra): La posizione nella quale i requisiti
predeterminati della tensione di tenuta dielettrica sono soddisfatti tra i contatti aperti
nel circuito principale dell'apparecchio.
Corrente ammissibile di breve durata: La corrente che un circuito o un apparecchio
di manovra può portare in posizione di chiusura per un periodo di breve durata
specificato in condizioni prescritte di impiego e comportamento.
Tensione applicata:
La tensione che esiste tra i terminali di un polo di un
apparecchio di manovra immediatamente prima della chiusura.
8.4 CEI EN 60060-1:
La presente norma EN 60060 parte 1 riguarda le prove su dispositivi che hanno
tensione massima per l'apparecchiatura, Um, superiore ad 1 kV. Questa parte della
norma è applicabile a:
prove sul dielettrico con tensione continua
prove sul dielettrico con tensione alternata
prove sul dielettrico con tensione ad impulso
prove sul dielettrico con combinazione delle precedenti
Definizioni:
Scarica distruttiva: Cedimento dell'isolamento sotto uno stress elettrico, nel quale la
scarica cortocircuita completamente l'isolamento e riduce la tensione tra gli elettrodi
praticamente a zero.
166
Scarica non distruttiva: Scarica tra due elettrodi intermedi o conduttori dove la
tensione di prova non collassa a zero.
Caratteristica presunta della tensione di prova: Caratteristica che si otterrebbe se non
avvenisse un scarica distruttiva. Quando viene utilizzata la caratteristica presunta
della tensione di prova deve essere sempre dichiarato.
Caratteristica reale della tensione di prova: Caratteristiche che si verificano durante
una prova ai terminali dell'oggetto in questione.
Valore della tensione di prova:
Tensione sopportabile: Valore specifica presunto di tensione che caratterizza
l'isolamento del dispositivo con riguardo al test di tenuta.
Tolleranza: Regole che permettono di differenziare il valore misurato dal valore
specifico
8.5 CEI EN 60865-1:
La parti prima di questa norma si applica agli effetti meccanici e termici delle
correnti di cortocircuito. Essa include procedure normalizzate per il calcolo degli
effetti delle correnti di cortocircuito, suddivisi in:
effetti elettromagnetici sui conduttori rigidi e sui conduttori flessibili
effetti termici sui conduttori nudi e sul materiale elettrico
Nella norma vengono trattati esclusivamente i sistemi in corrente alternata.
Aspetti particolari:
a) Il calcolo delle correnti di corto circuito deve essere basato sulla norma IEC
60494. Per determinare il massimo valore della corrente di corto circuito
possono essere prese in considerazioni informazioni addizionali belle altre
norme IEC.
167
b) La durata del corto circuito usata in questo standard dipende dal concetto di
protezione e deve essere considerato in tal senso.
In questa norma vengono presentati:
lo stress nei conduttori rigidi
tensioni nei conduttori flessibili
forze sugli isolatori
spostamento della campata dei conduttori flessibili
riscaldamento dei conduttori
Le forze elettromagnetiche vengono indotte nei conduttori dalla corrente che scorre
dentro di essi, dove queste forze interagiscono tra conduttori paralleli causano stress e
di questo si deve tenere conto.
Nel caso di conduttori paralleli in cui la distanza tra loro non è comparabile con la
loro lunghezza è possibile calcolare tali forze tramite la seguente formula:
dove:
-i1 e i2 sono i valori istantanei delle correnti nei conduttori:
-l è la distanza dal centro della linea tra i supporti:
-a è la distanza dal centro della linea tra i conduttori:
Conduttori rigidi-Calcolo delle forze elettromagnetiche in caso di cortocircuito
trifase:
In un sistema trifase dove il conduttore principale è posizionato al centro della linea,
la massima forza agisce sul conduttore principale ed è data dalla seguente formula:
168
dove:
-ip è il valore di picco della corrente di cortocircuito nel caso di un sistema trifase
bilanciato.
-l è la massima distanza dal centro della linea tra due supporti adiacenti
-am è l'effettiva distanza dal conduttore principale
Calcolo delle forze elettrodinamiche durante un guasto bifase:
Si può calcolare il picco di forza tramite la seguente formula:
dove:
-ip2 è il picco di corrente di cortocircuito nel caso di guasto bifase
-l è la massima distanza dal centro della linea tra due supporti adiacenti
-am è l'effettiva distanza dal conduttore principale
169
9.Conclusioni:
Il lavoro svolto si prefiggeva come scopo la caratterizzazione dei contatti elettrici,
una prima parte in generale su diverse tipologie di contatto e una seconda parte su un
contatto elettrico in particolare, per valutare se questo, sottoposto a due prove
specifiche, prova di durata e la prova in corto-circuito, fosse in grado di superare tali
prove senza subire danni. Lo studio ha mostrato le diverse variabili in gioco quando
si vuole analizzare un contatto elettrico, partendo dalla teoria e arrivando nella
pratica, i risultati mostrano come il dispositivo su cui si è effettuato lo studio è in
grado di sopportare queste due tipologie di prove senza subire danni.
Per migliorare ulteriormente lo studio effettuato e per arrivare a scegliere la migliore
tipologia di contatto andrebbero analizzate tutte le tipologie di pinze anche da un
punto di vista elettrico, non solo meccanico come è stato effettuato in questo lavoro.
Il punto di partenza sono sicuramente le caratteristiche meccaniche di ogni pinza e la
valutazione della resistenza di contatto per ogni tipologia ma non si può non valutare
la componente elettrodinamica e termica che i dispositivi devono sopportare durante
le prove e durate il loro normale funzionamento.
La scelta di concentrarsi su un solo dispositivo è stata fatta per capire se tale oggetto
potesse o meno superare due determinate prove, quindi per espandere e completare il
lavoro andrebbero testati tutti quanti i dispositivi.
In conclusione lo studio ha mostrato i punti di forza di ogni contatto da un punto di
vista meccanico e la resistenza alle due prove, prova di tenuta e prova di corto
circuito, di un dispositivo in particolare, il sezionatore di Zefiro MT.
I risultati ottenuti mostrano come l dispositivo in questione sia in grado di sopportare
tale prove.
170
In futuro andrebbero studiate e analizzate tutte le tipologie di pinze presenti sul
mercato e poi effettuare la miglior scelta, che sarà sicuramente un compromesso tra
prezzo e prestazioni.
171
Allegato 1:
2.6 Misura sperimentale della resistenza di contatto:
2.6.1 Nota tecnica di S.P.I.I. S.p.a. :
NOTA TECNICA
Misure sperimentali
Resistenza di Contatto Pinze Sezionatori
172
INDICE
1.
CONTROLLO DOCUMENTO .................................................................................................................................. 174
Revisioni ................................................................................................................................................................. 174
ACRONIMI, ABBREVIAZIONI E DEFINIZIONI ................................................................................................... 174
RIFERIMENTI ........................................................................................................................................................... 174
OGGETTO ................................................................................................................................................................. 175
STRUMENTI ............................................................................................................................................................. 175
MODALITA’ DI MISURA ........................................................................................................................................ 175
MISURE SPERIMENTALI........................................................................................................................................ 176
7.1.
Pinza Sezionatore D008575 (401071) .................................................................................................................... 176
7.1.1.
Pinza completa .................................................................................................................................................... 183
7.2.
Pinza sezionatore S3 (D342836) ............................................................................................................................. 185
7.3.
Pinza 401840 .......................................................................................................................................................... 188
7.3.1.
Lama 300003P1 .................................................................................................................................................. 190
Pinza 401987 .............................................................................................................................................................. 191
8.1.1.
Lama 300003P1 .................................................................................................................................................. 194
8.1.2.
Lama in acciaio ................................................................................................................................................... 195
CONCLUSIONE ........................................................................................................................................................ 197
1.1.
2.
3.
4.
5.
6.
7.
8.
9.
173
1. CONTROLLO DOCUMENTO
1.1. Revisioni
Modifi
ca
Issue
00
Descrizione delle modifiche
Eseguito
Controllato
Approvato
Data
Revision Description
Edited by
Controlled
Approved
Date
Emissione
G. Salati
S. Zuffetti
S. Zuffetti
11.04.’14
2. ACRONIMI, ABBREVIAZIONI E DEFINIZIONI
Sigla
Descrizione
Definitions
Description
3. RIFERIMENTI
Documento
Document
Autore
Author
Descrizione
Description
174
4. OGGETTO
Nell’ottica di una collaborazione con il Politecnico di Milano per lo sviluppo di un modello
matematico per i contatti dei sezionatori è risultato necessario effettuare delle misure sperimentali
di validazione. Di seguito si riportano le misure di resistenza di contatto effettuate su diverse pinze
di sezionatori, in particolare:
Pinza sezionatore D008575 (401071);
Pinza sezionatore S3 (D342836);
401840;
401987;
Pinza sezionatore ETR1000 3 kV (300736).
5. STRUMENTI
Multimetro digitale Fluke codice SPII 1071
Alimentatore Gwinstek PSW 30-108
6. MODALITA’ DI MISURA
Misura voltamperometrica, ottenuta alimentando con una corrente nota
di 100A (controllata
attraverso una resistenza di precisione), e misurando la caduta di tensione in luogo della resistenza
fra i due punti di misura.
175
7. MISURE SPERIMENTALI
7.1. Pinza Sezionatore D008575 (401071)
Materiale lama (D094785): Rame Argentato.
Materiale pinza (401071): Bronzo Fosforoso.
176
177
Dalle foto sopra riportate si nota come la deformazione della pinza è concentrata nel tratto finale,
questa considerazione permette di poter ricavare la forza di contatto considerando solo la
deformazioni del tratto su menzionato (come trave incastrata).
In questo caso la misura è stata effettuata con una sola delle 2 pinze (il sezionatore monta 2 pinze),
e da come si vede i punti di misura sono posizionati in modo da fornire una misura totale di tutto il
contatto.
178
Valore misurato: 6,9066 mV.
Resistenza calcolata: 0,069 mΩ (corrente 100 A).
La seconda misura effettuata è rappresentativa di un singolo “dito” della pinza.
Valore misurato: 3,7166 mV.
Resistenza calcolata: 0,2973 mΩ (corrente 12,5 A, la corrente totale di 100 Ampere divisa per le 8
“dita” a contatto).
179
Misura altro “dito”.
Valore misurato: 3,6535 mV.
Resistenza calcolata: 0,2923 mΩ (corrente 12,5 A, la corrente totale di 100 Ampere divisa per le 8
“dita” a contatto).
180
Valore misurato: 3,5915 mV.
Resistenza calcolata: 0,2873 mΩ (corrente 12,5 A, la corrente totale di 100 Ampere divisa per le 8
“dita” a contatto).
181
Questa misura tiene conto delle 4 dita e della porzione di materiale posteriore della pinza.
Valore misurato: 5.7970 mV.
Resistenza calcolata: 0,1159 mΩ (50 Ampere).
182
7.1.1. Pinza completa
Misura rappresentativa dell’intero contatto:
Valore misurato: 3,61 mV.
Resistenza calcolata: 0,0361 mΩ (corrente 100 A).
Misura singolo “dito”:
Valore misurato: 1,9 mV.
Resistenza calcolata: 0,31 mΩ (corrente 6,25 A, la corrente totale di 100 Ampere divisa per le 16
“dita” a contatto).
183
La seguente misura mette in risalto il contributo della parte inferiore della pinza:
Valore misurato: 3,16 mV.
184
7.2. Pinza sezionatore S3 (D342836)
Materiale Pinza (D342836): Cu ETP Argentato
Materiale Lama: Cu ETP Argentato
I punti di misura scelti, come è possibile vedere nella foto precedente, permettono di effettuare una
misura rappresentativa dell’intera pinza.
185
Valore misurato: 2,0074 mV.
Resistenza calcolata: 0,0201 mΩ (corrente 100 A).
186
Misura “dito” 1:
Valore misurato: 0,81 mV.
Resistenza calcolata: 0,07 mΩ (corrente 12,5 A).
Misura “dito” 2:
Valore misurato: 0,70 mV.
Resistenza calcolata: 0,06 mΩ (corrente 12,5 A).
Misura “dito” 3:
Valore misurato: 1,3 mV.
Resistenza calcolata: 0,1 mΩ (corrente 12,5 A).
Misura “dito” 4:
Valore misurato: 0,82 mV.
Resistenza calcolata: 0,07 mΩ (corrente 12,5 A).
Misura “dito” 5:
Valore misurato: 0,8 mV.
Resistenza calcolata: 0,06 mΩ (corrente 12,5 A).
Misura “dito” 6:
Valore misurato: 0,81 mV.
Resistenza calcolata: 0,07 mΩ (corrente 12,5 A).
Misura “dito” 7:
Valore misurato: 0,89 mV.
Resistenza calcolata: 0,07 mΩ (corrente 12,5 A).
Misura “dito” 8:
187
Valore misurato: 0,66 mV.
Resistenza calcolata: 0,05 mΩ (corrente 12,5 A).
7.3. Pinza 401840
Materiale Pinza (401840): Bronzo Crudo Cu Sn 8
Materiale Lama (402934): Rame semicrudo Cu ETP - Finitura: Cu/Ni 10b
I punti di misura scelti, come è possibile vedere nella foto precedente, permettono di effettuare una
misura rappresentativa dell’intera pinza.
Valore misurato: 24,8626 mV.
188
Resistenza calcolata: 0,2486 mΩ (corrente 100 A).
Da notare che il valore di resistenza così elevato è da imputare anche alla nichelatura della lama,
infatti la stessa pinza di seguito è stata provata con lama in rame argentato.
Misura “dito sopralama”:
Valore misurato: 16,67 mV.
Resistenza calcolata: 0,34 mΩ (corrente 50 A).
Misura “dito sottolama”:
Valore misurato: 18,67 mV.
Resistenza calcolata: 0,37 mΩ (corrente 50 A).
Misura che tiene conto della caduta di potenziale tra un dito della pinza e il suo supporto.
189
Valore misurato: 4.1554 mV.
7.3.1. Lama 300003P1
Si è ritenuto opportuno effettuare una misura della resistenza di contatto con una lama in rame
argentato per poter raffrontare le diverse tipologie di pinze indipendentemente dal materiale delle
lame. In questa ottica lo spessore della lama e la relativa superfice di contatto resta invariata.
I punti di misura scelti, come è possibile vedere nella foto precedente, permettono di effettuare una
misura rappresentativa dell’intera pinza.
Valore misurato: 12,23 mV.
Resistenza calcolata: 0,1223 mΩ (corrente 100 A).
190
Misura “dito”:
Valore misurato: 8,10 mV.
Resistenza calcolata: 0,162 mΩ (corrente 50 A).
8. Pinza 401987
Materiale pinza (401987): Bronzo Cu Sn8
Materiale supporto (401986): Ottone P-CuZn40
Materiale Lama (402934): Rame semicrudo Cu ETP - Finitura: Cu/Ni 10b
191
I punti di misura scelti, come è possibile vedere nella foto precedente, permettono di effettuare una
misura rappresentativa dell’intera pinza.
Valore misurato: 21,16 mV.
Resistenza calcolata: 0,2116 mΩ (corrente 100 A).
Da notare che il valore di resistenza così elevato è da imputare anche alla nichelatura della lama,
infatti la stessa pinza di seguito è stata provata con lama in rame argentato.
192
Misura “dito sopralama”:
Valore misurato: 16,33 mV.
Resistenza calcolata: 0,3266 mΩ (corrente 50 A).
Misura “dito sottolama”:
Valore misurato: 16.33 mV.
Resistenza calcolata: 0,3266 mΩ (corrente 50 A).
193
8.1.1. Lama 300003P1
Si è ritenuto opportuno effettuare una misura della resistenza di contatto con una lama in rame
argentato per poter raffrontare le diverse tipologie di pinze indipendentemente dal materiale delle
lame. In questa ottica lo spessore della lama e la relativa superfice di contatto resta invariata
I punti di misura scelti, come è possibile vedere nella foto precedente, permettono di effettuare una
misura rappresentativa dell’intera pinza.
Valore misurato: 13,73 mV.
Resistenza calcolata: 0,1373 mΩ (corrente 100 A).
Misura “dito sopralama”:
Valore misurato: 8,89 mV.
Resistenza calcolata: 0,178 mΩ (corrente 50 A).
Misura “dito sottolama”:
194
Valore misurato: 9.34 mV.
Resistenza calcolata: 0,187 mΩ (corrente 50 A).
8.1.2. Lama in acciaio
I punti di misura scelti, come è possibile vedere nella foto precedente, permettono di effettuare una
misura rappresentativa dell’intera pinza.
Valore misurato: 63,4 mV.
Resistenza calcolata: 0,634 mΩ (corrente 100 A).
195
9. Pinza D343009 sezionatore ETR1000 3 kV (D008778)
Materiale Pinza: Rame Cu ETP Argentatura dura 5 µm
Materiale Lama: Rame Cu ETP Argentato 15 µm
I punti di misura scelti, come è possibile vedere nella foto precedente, permettono di effettuare una
misura rappresentativa dell’intera pinza.
Valore misurato: 1,227 mV.
Resistenza calcolata: 0,01227 mΩ (corrente 100 A).
Misura “dito” 1:
Valore misurato: 0,89 mV.
Resistenza calcolata: 0,107 mΩ (corrente 8,3 A, 100 A divisa per 12 dita).
196
Misura “dito” 4:
Valore misurato: 0,90 mV.
Resistenza calcolata: 0,107 mΩ (corrente 8,3A, 100 A divisa per 12 dita).
10. CONCLUSIONE
Per validare ulteriormente il modello dei contatti si propone di effettuare una misura sperimentale
della forza di contatto tramite cella di carico, in modo da poter affinare il modello meccanico di
ogni pinza.
197
Allegato 2:
NOTA TECNICA
Prove di tenuta per le pinze del sezionatore di
Zefiro MT
198
INDICE
1.
1.1.
2.
3.
4.
5.
6.
7.
7.1.
CONTROLLO DOCUMENTO .................................................................................................................................. 174
Revisioni ................................................................................................................................................................. 174
ACRONIMI, ABBREVIAZIONI E DEFINIZIONI ................................................................................................... 174
RIFERIMENTI ........................................................................................................................................................... 174
OGGETTO ................................................................................................................................................................. 175
STRUMENTI ............................................................................................................................................................. 175
MODALITA’ DI MISURA ........................................................................................................................................ 175
MISURE SPERIMENTALI........................................................................................................................................ 176
Pinza Sezionatore di Zefiro MT: 401840: .............................................................................................................. 176
8 CONCLUSIONI
199
11. CONTROLLO DOCUMENTO
11.1.
Modifi
ca
Issue
Revisioni
Descrizione delle modifiche
Eseguito
Controllato
Approvato
Data
Revision Description
Edited by
Controlled
Approved
Date
Emissione
G. Salati
S. Zuffetti
S. Zuffetti
14.07.’14
00
12. ACRONIMI, ABBREVIAZIONI E DEFINIZIONI
Sigla
Descrizione
Definitions
Description
13. RIFERIMENTI
Documento
Autore
Descrizione
Document
Author
Description
200
14. OGGETTO
Nell’ottica di una collaborazione con il Politecnico di Milano per lo sviluppo di un modello
matematico per i contatti dei sezionatori è risultato necessario effettuare delle misure sperimentali
di validazione. Si è ritenuto necessario quindi, sia per verificare i dati acquisiti tramite il software
multifisico Comsol, sia per la futura prova preso il CESI di Milano, effettuare delle prove di tenuta
per la corrente di breve durata e quindi verificare tramite una termocoppia la temperatura raggiunta
dalla lama e dalle pinze che costituiscono il contatto.
La pinza testata è:
401840 Sezionatore di Zefiro MT
15. STRUMENTI
Termocoppia (chiedi a giovanni)
Alimentatore Sala prova presso SPII, Imax=3860 A (chiedi a giovanni)
16. MODALITA’ DI MISURA
La misura è stata effettuata collegando la pinza in questione all'alimentatore e utilizzando la
termocoppia per valutare la temperatura a cui si porta il contatto elettrico. Sono state effettuate tre
prove:
1.
2.
3.
2000 A per 6 s
3000 A per 1 s
3860 A per 1 s
201
17. MISURE SPERIMENTALI
17.1.
Pinza Sezionatore di Zefiro MT: 401840: (chiedi foto a Giovanni)
-La prima prova è stata eseguita applicata 2000 A per 3 s alla pinza in questione.
Dopo la prova visivamente non si sono riscontrati segni particolari sulla pinza che sembrava essere
in perfette condizioni.
La termocoppia ha misurato un valore di temperatura pari a 120 °C
-La seconda prova è stata eseguita applicata 3000 A per 1 s alla pinza in questione.
Dopo la prova visivamente non si sono riscontrati segni particolari sulla pinza che sembrava essere
in perfette condizioni.
La termocoppia ha misurato un valore di temperatura pari a 121 °C.
Il risultato è falsato dal fatto che la termocoppia ha una costante di tempo elevata, applicando la
corrente per un secondo il fenomeno risulta essere più veloce della costante di tempo quindi ciò che
viene misurato non è l'incremento di temperatura, ma il decremento perchè la corrente non scorre
più nella pinza.
-La terza prova è stata eseguita applicata 3000 A per 1 s alla pinza in questione.
Dopo la prova visivamente non si sono riscontrati segni particolari sulla pinza che sembrava essere
in perfette condizioni.
La termocoppia ha misurato un valore di temperatura pari a 160 °C.
Il risultato è falsato dal fatto che la termocoppia ha una costante di tempo elevata, applicando la
corrente per un secondo il fenomeno risulta essere più veloce della costante di tempo quindi ciò che
viene misurato non è l'incremento di temperatura, ma il decremento perchè la corrente non scorre
più nella pinza.
202
8. CONCLUSIONI
Secondo le norme la prova di tenuta deve essere effettuata con una corrente in continua pari a 5000
A per 1 s, data l'impossibilità di ricreare tali condizioni di prova a causa dell'alimentare presente
presso il laboratorio di prova di SPII S.p.a. che garantisce una corrente massima pari a 3860 A, si è
deciso di effettuare prove con corrente minore e tempo maggiore.
Essendo il fenomeno adiabatico, si può considerare il fenomeno come lineare, quindi i valori
misurati con 2000 A possono essere usati per ricavare i valori di temperatura con una corrente pari a
5000 A.
In conclusione si è dimostrato che la pinza in questione riesce a superare le prove senza problemi,
non sono stati riscontrati difetti nella pinza dopo le prove, inoltre le temperature sono sopportabili
per i materiali in questione, visto che si tratta di acciaio per quanto riguarda la lama e di bronzo per
quanto riguarda la pinza.La pinza supera la prova.
203
Bibliografia:
I.
II.
-Ragnar Holm, Electric Contacts: Theory and application.
Paul G.Slade, Electrical Contacts: Principles and Applications.
III.
Norma CEI EN-50124_1
IV.
Norma CEI EN-50388.
V.
Norma CEI EN-60060_1.
VI.
Norma CEI EN-60077_1.
VII.
Norma CEI EN-60077_2.
VIII.
Norma CEI EN-60077_3.
IX.
Norma CEI EN-60865_1.
X.
Casare Mario Arturi, Elettromagnetismo applicato e metodi di calcolo.
XI.
Franco Pardini, Apparecchi Elettrici: Teoria, costruzione, applicazione.
XII.
Warren C.Young, Richard G.Budynas: Roark's Formulas for Stress and
Strain.
XIII.
A.C. Snowdon: Studies of Electrodynamic Forces Occurring at Electrical
Contacts.
XIV.
Koichi Koibuchi, Koichiro Sawa: Numerical studies on current and
thermal distributions of electric contacts by FEM.
XV.
Yoshihiro Kawase, Hiroyuki Mori: 3-D Finite Element Analysis of
Elettrodynamic Repulsion Forces in Stationary Electric Contacts.
XVI.
Christina Faltin: Electrodynamic Repulsion Between Electric Contacts
with Arbitrary Current-Density Distribution.
XVII.
Morton Antler: Effect of Surface Contamination on Electric Contact
Performance.
Yasushi Saitoh Kazuo Lida: Dependency of Contact Resistance on Load.
XVIII.
204
XIX.
Shigeru Sawada, Kaori Shimizu, Yasuhiro Hattori: Analysis of contact
resistance behavior for electric contacts with plating layer.
205
Ringraziamenti:
In particolare vorrei ringraziare la mia famiglia che mi ha permesso di poter
affrontare il percorso universitario in modo serene e tranquillo, e mi ha sempre dato il
pieno appoggio in ogni mia decisione, quindi vorrei ringraziare in particolare mio
padre, mia madre e i miei fratelli.
Un ringraziamento particolare va a SPII S.p.a. per la possibilità di sviluppare la mia
tesi presso gli uffici di SPII S.p.a. , in particolare vorrei ringraziare Silvio, Daniele,
Franco, Nicola, Giorgio e Giovanni per tutto l'aiuto che mi hanno dato.
Vorrei ringraziare il mio relatore, il Prof. Alberto Dolara per la disponibilità, la
pazienza e l'aiuto fornito per lo sviluppo e la correzione della tesi.
Vorrei ringraziare inoltre tutti i miei amici e i miei compagni di corso, senza di loro
sicuramente il percorso sarebbe stato più difficile e meno divertente, in particolare
vorrei ringraziare Andreas, Alberto e Vittoria che sono stati i miei fedeli compagni di
studi per cinque anni e senza di loro avrei avuto sicuramente molte più difficoltà.
Un ringraziamento va infine a Giulia, Giacomo, Daniele, Irene e Federica che hanno
reso le mie giornate di studio in biblioteca e di svago sempre serene e divertenti che
mi hanno permesso di studiare in tranquillità e serenità.
In particolare vorrei ringraziare il mio grande amico Tommaso per tutto il tempo in
cui mi è stato vicino sia nei momenti difficili che in quelli felici, riuscirò a
sdebitarmi!!!!!!!.
206