Università degli Studi di Brescia
Facoltà di Ingegneria
CORSO DI LAUREA IN
INGEGNERIA INFORMATICA
E IN INGEGNERIA
ELETTRONICA E DELLE
TELECOMUNICAZIONI
FISICA SPERIMENTALE I
Meccanica e Termodinamica
APPUNTI DELLE LEZIONI
Docente: Prof. Giorgio Sberveglieri
Assistenti al Corso: Dr. Andrea Ponzoni,Dr.ssa Camilla Baratto
Dr. Maurizio Donarelli
A.A. 2015-2016
i
Indice
Indice
1 Introduzione
1
2 Misure e unità di misura
2
Precisione e cifre significative . . . . . . . . . . . .
3
Grandezze e unità fondamentali . . . . . . . . . . .
4
Sistemi di riferimento (invarianza delle leggi fisiche)
6
Angoli piani . . . . . . . . . . . . . . . . . . . . .
7
3 Vettori
8
Somma e differenza di vettori . . . . . . . . . . . .
9
Moltiplicazione di un vettore per uno scalare . . . .
11
Componenti di un vettore . . . . . . . . . . . . . .
11
Prodotto scalare . . . . . . . . . . . . . . . . . . .
13
Prodotto vettoriale . . . . . . . . . . . . . . . . .
14
Matrici e determinanti . . . . . . . . . . . . .
16
Derivata di un vettore . . . . . . . . . . . . . . . .
16
4 Equilibrio di un corpo rigido
19
Momento di una forza (momento meccanico) . . . .
19
Momento di più forze concorrenti . . . . . . . . . .
21
Coppia di forze . . . . . . . . . . . . . . . . . . .
22
Composizione di forze parallele . . . . . . . . . . .
23
Centro di Massa . . . . . . . . . . . . . . . . . . .
25
ii
Indice
Equilibrio di una particella . . . . . . . . . . . . .
27
Equilibrio di un corpo rigido . . . . . . . . . . . .
28
5 Cinematica
29
Moto rettilineo: velocità . . . . . . . . . . . . . . .
30
Moto rettilineo: accelerazione . . . . . . . . . . . .
31
Moto rettilineo uniforme . . . . . . . . . . . . . . .
34
Moto rettilineo uniformemente accelerato . . . . . .
34
Moto curvilineo: velocità . . . . . . . . . . . . . .
38
Moto curvilineo: accelerazione . . . . . . . . . . .
40
Corpi in caduta libera . . . . . . . . . . . . . . . .
41
Moto con accelerazione costante . . . . . . . . . . .
43
Moto dei proiettili . . . . . . . . . . . . . . . . . .
45
Accelerazione tangenziale e normale . . . . . . . .
47
Moto circolare:velocità . . . . . . . . . . . . . . . .
49
Moto circolare: accelerazione . . . . . . . . . . . .
51
Moto curvilineo generico nel piano . . . . . . . . .
54
6 Cinematica relativa
56
Velocità relativa . . . . . . . . . . . . . . . . . . .
56
Moto relativo traslatorio uniforme. Trasformazione Galileana
58
7 Dinamica di una particella
62
Principio di inerzia (Prima legge di Newton) . . . .
62
Massa . . . . . . . . . . . . . . . . . . . . . . . .
64
iii
Indice
Quantità di moto . . . . . . . . . . . . . . . . . .
Principio di conservazione della quantità di moto .
Seconda e Terza Legge di Newton . . . . . . . . . .
Forze di attrito . . . . . . . . . . . . . . . . . . . .
Moto curvilineo . . . . . . . . . . . . . . . . . . .
Momento della quantità di moto (Momento angolare)
Forze centrali . . . . . . . . . . . . . . . . . . . .
Leggi di forza . . . . . . . . . . . . . . . . . . . .
8 Lavoro ed Energia
Risoluzione dell’equazione fondamentale della dinamica
Lavoro . . . . . . . . . . . .
Potenza . . . . . . . . . . .
Energia Cinetica . . . . . . .
Lavoro di una forza costante
Energia Potenziale . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Moto piano in un campo di forze centrali .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Conservazione dell’energia meccanica di una particella .
Moto rettilineo sotto l’azione di forze conservative . .
Moto in un campo di forze centrali . . . . . .
Discussione sulle curve della energia potenziale
Forze non conservative . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
66
67
69
75
83
84
87
88
90
90
91
95
97
100
102
110
111
114
116
119
123
9 Dinamica di un sistema di particelle
127
Moto del centro di massa . . . . . . . . . . . . . . 127
iv
Indice
Leggi del moto di un sistema di particelle . . . . . 128
Massa ridotta . . . . . . . . . . . . . . . . . . . . 133
Momento angolare di un sistema . . . . . . . . . . 135
Momento angolare nei sistemi di riferimento C e L 139
Energia Cinetica di un sistema . . . . . . . . . . . 143
Conservazione dell’energia di un sistema di particelle 144
Energia interna di un sistema . . . . . . . . . . . . 147
Relazione tra l’energia cinetica nei sistemi C e L . . 148
Riassunto delle relazioni valide per i sistemi di particelle149
10 Urti
Impulso e quantità di moto . . . . . . . . . . . . .
Conservazione della quantità di moto nei processi di
urto . . . . . . . . . . . . . . . . . . . . . . .
Esempio . . . . . . . . . . . . . . . . . . . .
Urti in una dimensione . . . . . . . . . . . . . . .
Urti elastici . . . . . . . . . . . . . . . . . . .
Urti anelastici . . . . . . . . . . . . . . . . .
Il pendolo balistico . . . . . . . . . . . . . . .
Sistema di riferimento del centro di massa . . . . .
151
152
153
156
156
157
160
160
161
11 Corpo rigido
165
Momento angolare di un corpo rigido . . . . . . . . 167
Assi principali di un corpo rigido . . . . . . . 169
Calcolo dei momenti di inerzia . . . . . . . . . . . 170
v
Indice
Teorema di Steiner o degli assi paralleli (Teorema di Lagrange) . . . . . . . . . . . . 171
Raggio giratore di un corpo . . . . . . . . . . 173
Momento di inerzia di una lamina piana sottile 174
Momento di inerzia di una sbarra sottile omogenea . . . . . . . . . . . . . . . . . . 175
Equazione del moto rotatorio . . . . . . . . . . . . 176
Energia cinetica di rotazione . . . . . . . . . . . . 177
Moto di rotolamento senza strisciamento . . . . . . 179
12 Gravitazione
183
Dinamica planetaria . . . . . . . . . . . . . . . . . 185
Massa inerziale e massa gravitazionale . . . . . . . 189
Energia potenziale gravitazionale . . . . . . . . . . 190
Moto generale gravitazionale . . . . . . . . . . . . 195
Sezioni coniche . . . . . . . . . . . . . . . . . 195
Eccentricità in funzione dei parametri fisici del
moto gravitazionale . . . . . . . . . . 196
Campo Gravitazionale . . . . . . . . . . . . . . . . 200
Potenziale gravitazionale . . . . . . . . . . . . . . 202
Campo gravitazionale di un guscio sferico . . . . . 203
Campo gravitazionale di una sfera piena . . . . . . 206
Principio di equivalenza . . . . . . . . . . . . . . . 209
Gravitazione e forze intermolecolari . . . . . . . . . 210
vi
Indice
13 Termodinamica
212
Aspetti microscopici e macroscopici . . . . . . . . . 212
Il metodo termodinamico . . . . . . . . . . . . . . 212
Sistema, ambiente, frontiera . . . . . . . . . . . . . 213
Stati termodinamici e variabili di statoi . . . . . . . 213
Equilibrio termodinamico . . . . . . . . . . . . . . 214
Funzioni di stato ed equazioni di stato . . . . . . . 215
Trasformazioni termodinamiche . . . . . . . . . . . 216
Rappresentazione grafica di stati e trasformazioni218
Esempio di trasformazione reversibile . . . . . . . . 218
Equilibrio termico . . . . . . . . . . . . . . . . . . 219
Temperatura . . . . . . . . . . . . . . . . . . . . . 221
Misura della temperatura . . . . . . . . . . . 222
L’equazione di stato dei gas ideali . . . . . . . . . . 225
Legge di Charles . . . . . . . . . . . . . . . . 225
Legge di Gay - Lussac . . . . . . . . . . . . . 226
Legge di Boyle . . . . . . . . . . . . . . . . . . . . 227
Unità di misura della pressione . . . . . . . . . . . 230
Termometri . . . . . . . . . . . . . . . . . . . . . 231
Termometro a gas . . . . . . . . . . . . . . . 231
Termometro a resistenza . . . . . . . . . . . . 232
Termometro a liquido in capillare di vetro . . 233
Classificazione delle trasformazioni termodinamiche . . . . . . . . . . . . . . . . . 234
Indice
vii
Il calore . . . . . . . . . . . . . . . . . . . . . . . 234
Capacità termica e calore specifico . . . . . . . . . 236
Sorgenti di calore . . . . . . . . . . . . . . . . 237
Transizioni di fase e calori latenti . . . . . . . 237
Bilanci termici. Equilibri termici . . . . . . . 239
Il Lavoro in termodinamica . . . . . . . . . . . . . 240
Esempio . . . . . . . . . . . . . . . . . . . . 242
Unità di misura del lavoro . . . . . . . . . . . 244
Mulinello di Joule . . . . . . . . . . . . . . . . . . 244
Primo principio della termodinamica (nelle trasformazioni chiuse) . . . . . . . . . . . . . . . . . 245
Primo principio della termodinamica . . . . . 246
Energia interna di un gas . . . . . . . . . . . 248
Espansione libera di un gas perfetto (rarefatto) 248
Applicazioni del 1◦ P.T. ad un gas perfetto . . 249
Relazione di Mayer: . . . . . . . . . . . . . . 250
Gas perfetto . . . . . . . . . . . . . . . . . . 251
Trasformazione isoterma reversibile . . . . . . 251
Trasformazione adiabatica reversibile (Equazioni di Poisson) . . . . . . . . . . . . . . 252
Diagramma delle trasformazioni nel piano di Clapeyron252
Calore specifico di una politropica Λ di equazione
pV x = K . . . . . . . . . . . . . . . . . . . . 253
Entropia del gas perfetto . . . . . . . . . . . . . . 254
viii
Indice
Ciclo di Carnot per un gas perfetto . . . . . . . . . 255
Macchine termiche . . . . . . . . . . . . . . . . . . 257
Macchina di Stirling . . . . . . . . . . . . . . 259
Macchine frigorifere . . . . . . . . . . . . . . 261
Il frigorifero di Stirling
. . . . . . . . . . . . 263
Secondo principio della termodinamica . . . . . . . 265
Il Teorema di Carnot . . . . . . . . . . . . . . . . 268
Temperatura termodinamica assoluta . . . . . . . . 270
Teorema o disuguaglianza di Clausius . . . . . . . . 272
è possibile ogni ciclo? . . . . . . . . . . . . . . . . 274
Entropia . . . . . . . . . . . . . . . . . . . . . . . 274
Calcolo dell’entropia per un gas perfetto . . . 276
Variazione di entropia di generiche trasformazioni278
Entropia dell’Universo . . . . . . . . . . . . . 278
Entropia e processi naturali . . . . . . . . . . 280
Entropia ed energia inutilizzabile . . . . . . . 282
Terzo principio della termodinamica . . . . . . . . 283
Elementi di teoria cinetica dei gas . . . . . . . . . . 284
Introduzione . . . . . . . . . . . . . . . . . . 284
Equazione di stato pV = nRT
. . . . . . . . 284
Calcolo cinetico della pressione . . . . . . . . 285
Processo di diffusione . . . . . . . . . . . . . 288
Velocità del suono . . . . . . . . . . . . . . . 288
Distribuzione delle velocità molecolari . . . . . 289
Indice
ix
Verifica sperimentale della distribuzione di Maxwell . . . . . . . . . . . . . . . . . . . 291
Energia interna e calori molari secondo la teoria
cinetica . . . . . . . . . . . . . . . . . 292
x
Indice
Introduzione
1
1
Introduzione
La Fisica si occupa di descrivere e interpretare i fenomeni
naturali usando il metodo scientifico (Fisica=Natura)
Metodo Scientifico: I fenomeni naturali sono complessi. Necessità di schematizzare. Esempio: lancio del sasso; si eliminano le cause accessorie che si potranno in un secondo tempo
introdurre come perturbazioni al fenomeno semplice. La schematizzazione comporta la sostituzione del fenomeno naturale
con un modello semplificato.
La suddivisione della Fisica
Nel passato si avevano le varie branche della Fisica quasi scienze indipendenti
• luce → ottica
• suono → acustica
• calore → termodinamica
• moto → meccanica. Si è sviluppata per prima. Studia
il moto dei pianeti; cioè la gravitazione come parte della
meccanica
• elettromagnetismo (XIX◦ secolo)
Oggi si guarda alla Fisica in modo unitario e si cercano delle
leggi che possano spiegare i fenomeni di diverse branche.
Per verificare i modelli o le leggi e svilupparne dei nuovi si usa
l’osservazione e la sperimentazione
2
Introduzione
Composizione e dimensione dell’Universo
La materia è composta di particelle fondamentali e tutti i corpi
sono raggruppamenti di questi.
• Particelle fondamentali: elettroni (m = 10−30 Kg);
protoni (m = 10−27 Kg); neutroni (m = 10−27 Kg).
• atomi : nucleo (protoni+neutroni)+elettroni 1−210−10m =
0.1 − 0.2 nm. 104 specie e 1300 isotopi
• molecole 5000-10000 specie. Le più semplici sono formate da due atomi (H2, HCl). Si arriva fino a molecole
tipo DNA costituite da lunghe catene.
Solidi; liquidi; gas (plasma).
• corpo umano 1028 atomi
• Terra 1051 atomi. 6 1024 Kg
• Sole 1057 atomi
• Via Lattea 1011 stelle 1070 atomi
• Universo 1020 stelle 1010 galassie 1080 atomi.
R ≈ 1026 m 1010 anni luce
2
Misure e unità di misura
La misura costituisce un insieme di procedure e convenzioni
mediante le quali si può associare un numero seguito da
un’unità di misura ad ogni ente fisico (definizione operativa)
Introduzione
3
Si attua un confronto con un’unità di misura. È necessario
produrre la minore perturbazione sul sistema osservato
Precisione e cifre significative
Regola 1
Contando da sinistra e tralasciando gli zeri si prendano in
considerazione tutte le cifre fino alla cifra non significativa.
Es. x=3 m equivale a x=0,003 Km ma non a x=3,0 m
Regola 2
Quando si moltiplicano o si dividono due numeri occorre che
il prodotto o il quoziente non contengano più cifre significative
del fattore meno preciso.
Es. 2,3 x 3,14159 = 7,2
Regola 3
Nelle addizioni e sottrazioni l’ultima cifra significativa della
somma o della sottrazione occupa la stessa posizione relativa
dell’ultima cifra significativa delle quantità che devono essere
sommate o sottratte.
Es. 103,9kg+2,10kg+0,319kg=106,319 kg invece è 106,3 kg
La precisione della misura di una grandezza fisica definisce le
cifre significative.
Es: 840.7342 ± 1% significa una precisione di ±8.4 e quindi
deve essere scritto 840
4
Introduzione
Grandezze e unità fondamentali
• Grandezze fondamentali: non sono definite in termini di altre grandezze fisiche. Es: lunghezza, tempo.
• Grandezze derivate: la definizione operativa è basata sull’uso di altre grandezze fisiche. Es: velocità,
accelerazione.
Si definisce un’unità fondamentale o campione e il procedimento di misura.
Le grandezze fondamentali sono: Lunghezza, tempo, massa
e carica elettrica; sistema di unità MKSC adottato nel 1960
a Parigi durante la XI Conf: Generale dei Pesi e delle Misure.
• Lunghezza
Unità: metro (m) definito come 1.650.763,73 x L Kr86.
Cammino percorso dalla luce nel vuoto in 1/299.792.458s.
È accessibile, invariabile e si mantiene inalterato il campione costituito da una sbarra di Pt-Ir
• Tempo
Unità: secondo (s) definito come 9.192.631.770 x T
Cs133
In precedenza definito come 1/86400 del giorno solare
• Massa
Unità: Kilogrammo (Kg). Massa del prototipo internazionale del kilogrammo costituito da un blocco di platino. Esso è uguale alla massa di 10−3 m3 di acqua a 4 ◦C.
Introduzione
5
Il volume di 10−3 m3 è detto litro.
Nella definizione atomica corrisponde a 5, 0183 1025 C12
– Massa inerziale: la massa è un coefficiente caratteristico di ogni particella che ne determina il comportamento in presenza di una forza F~ = m~a
– Massa gravitazionale: la massa di un corpo è sempre proporzionale al suo peso, cioé alla forza di attrazione esercitata su di esso dalla Terra P~ = m~g
(Newton)
Definizione operativa della massa gravitazionale
• Carica elettrica
Unità: coulomb (C) definito come 6.241870 1018 qe - carica dell’elettrone.
A rigore venne scelta la corrente elettrica con unità di
misura l’ampere (A). Il coulomb è la quantità di cariche elettriche che passano attraverso la sezione di un
conduttore quando la corrente è uguale a 1 A
Il Sistema Internazionale definisce come unità fondamentali
MKSA e il kelvin (K) per misurare le temperature, la candela
6
Introduzione
(cd) per misurare l’intensità luminosa e la mole per misurare
la quantità di materia.
La mole è la quantità di materia costituita da NA = 6, 0221023
unità elementari (atomi, molecole, ioni, etc.). NA è chiamato
Numero di Avogadro ed è definito come il numero di atomi
contenuti in 12 g di C12
Il SI ha soppiantato il sistema cgs (centimetro, grammo, secondo)
Sistemi di riferimento (invarianza delle leggi fisiche)
La stessa grandezza assume valori diversi se misurata da osservatori in moto tra loro.
Esempio: Velocità di un treno misurata da un osservatore posto a terra, posto su un automobile o posto sul treno stesso.
Il valore misurato dipende dal sistema di riferimento dell’osservatore.
Sistemi di riferimento inerziali : possono essere in moto rettilineo uniforme tra loro.
Osservatori solidali con diversi sistemi di riferimento inerziali
possono ottenere valori numerici diversi delle grandezze che
misurano ma le relazioni tra esse, cioé le leggi fisiche, sono le
stesse per tutti gli osservatori
7
Introduzione
Angoli piani
Grandezza fisica derivata dalla lunghezza. Rappresenta la
porzione di piano compresa tra due semirette con origine in
comune
La misura di θ in radianti (unità adimensionale) è
θ=
l
R
Un angolo piano completo attorno ad un punto è θ = 2πR/R =
2π
Nella misura in gradi la circonferenza è divisa in 360◦, ogni
grado è diviso in 600(minuti primi), ogni minuto primo è diviso
in 60” (secondi).
Vale la relazione
θrad : 2π = θgr : 360◦
8
3
Vettori
Vettori
• Grandezze scalari: sono completamente determinate
dalla loro grandezza espressa nella corrispondente unità
di misura; Es: volume, temperatura
• Grandezze vettoriali: richiedono per essere completamente determinate oltre alla loro grandezza una
direzione.
Sono caratterizzate da:
– intensità (textbfmodulo) per convenzione la lunghezza del segmento
– direzione determinata dalla retta
– verso determinato dalla freccia
Es: velocità, forza, accelerazione
9
Vettori
Risulta
|OA| =
√
16 + 9 = 5
3
θ = arctan ≈ 37◦
4
versore: è un vettore di modulo unitario. Si scrive û.
Un vettore V~ parallelo a un versore û si può esprimere nella
forma
V~ = |V~ |û = V û
Due vettori sono uguali o equipollenti se hanno lo stesso modulo e puntano nella stessa direzione e verso.
Somma e differenza di vettori
Dati due vettori dotati delle stesse unità di misura, si definisce
la somma (geometricamente)
La somma vettoriale è commutativa
V~1 + V~2 = V~2 + V~1
e associativa
(V~1 + V~2) + V~3 = V~1 + (V~2 + V~3)
10
Vettori
Algebricamente
Si ottiene utilizzando la legge dei coseni
q
V = V12 + V22 + 2V1V2 cos θ
Mentre tramite il teorema dei seni ed essendo sin(π − θ) =
sin(θ)
V
V1
V2
=
=
sin θ sin β sin α
Si definisce differenza di due vettori
~ = V~1 − V~2 = V~1 + (−V~2)
D
Si ha
q
D = V12 + V22 + 2V1V2 cos(π − θ)
11
Vettori
La differenza vettoriale è anticommutativa
V~1 − V~2 = −(V~2 − V~1)
Le relazioni fra vettori sono invarianti per traslazione o rotazione delle coordinate
Moltiplicazione di un vettore per uno scalare
La moltiplicazione di un vettore V~ per uno scalare m produce
• m > 0 il vettore mV~ ha lo stesso verso e direzione di V~
e modulo m|V~ |
• m < 0 il vettore mV~ ha stessa direzione e verso opposto
a V~ e modulo m|V~ |
Componenti di un vettore
Tutti i vettori che, quando sommati, danno per somma V~ sono
chiamati vettori componenti di V~ .
Dato un punto P di coordinate cartesiane X, Y, Z, il vettore
posizione ~r può essere rappresentato da
12
Vettori
~r = X ûx + Y ûy + Z ûz
√
|~r| = X 2 + Y 2 + Z 2
dove ûx, ûy e ûz sono tre versori diretti come gli assi cartesiani
X, Y e Z sono chiamate componenti (ortogonali) cartesiane.
X ûx è chiamato vettore componente cartesiano lungo la direzione x
In termini di componenti cartesiane la somma di vettori è
espressa
V~1 = V1xûx + V1y ûy + V1z ûz
V~2 = V2xûx + V2y ûy + V2z ûz
si ha
V~ = V~1 + V~2 = (V1x + V2x)ûx + (V1y + V2y )ûy + (V1z + V2z )ûz
La somma di n vettori V~1, V~2, . . . V~n risulta
n
n
n
X
X
X
V~ =
Vixûx +
Viy ûy +
Viz ûz
i=1
i=1
i=1
La moltiplicazione di un vettore per uno scalare diventa
mV~ = (mVx)ûx + (mVy )ûy + (mVz )ûz
13
Vettori
Prodotto scalare
Si definisce prodotto scalare fra i due vettori
~·B
~ = |A||
~ B|
~ cos θ
A
(3.1)
~B
~ =0
se θ = π2 , cioé i due vettori sono perpendicolari, allora A·
Il prodotto scalare gode della proprietà commutativa
~·B
~ =B
~ ·A
~
A
e distributiva rispetto alla somma
~ · (A
~ + B)
~ =C
~ ·A
~+C
~ ·B
~
C
Valgono le seguenti relazioni
ûx · ûx = ûy · ûy = ûz · ûz = 1
ûx · ûy = ûy · ûz = ûz · ûx = 0
Se i due vettori sono espressi in coordinate cartesiane
~·B
~ = (Axûx + Ay ûy + Az ûz ) · (Bxûx + By ûy + Bz ûz ) =
A
= AxBx + Ay By + Az Bz
14
Vettori
Si ricava inoltre utilizzando la (3.1)
~·B
~
A
AxBx + Ay By + Az Bz
q
cos θ =
=
AB
(A2x + A2y + A2z )(Bx2 + By2 + Bz2)
Prodotto vettoriale
Si definisce prodotto vettoriale
~ =A
~×B
~
C
~eB
~ il cui
un vettore perpendicolare al piano individuato da A
verso è determinato con la regola della vite destrorsa o della
mano destra e di modulo
C = AB sin θ
Si ha
~×A
~=0
A
15
Vettori
gode della proprietà anticommutativa
~×B
~ = −B
~ ×A
~
A
e distributiva rispetto alla somma
~ × (A
~ + B)
~ =C
~ ×A
~+C
~ ×B
~
C
Per i versori degli assi risulta
ûx × ûx = ûy × ûy = ûz × ûz = 0
ûx × ûy = ûz ; ûy × ûx = −ûz
ûy × ûz = ûx ; ûz × ûy = −ûx
ûz × ûx = ûy ; ûx × ûz = −ûy
In forma cartesiana
~ ×B
~ = (Axûx + Ay ûy + Az ûz ) × (Bxûx + By ûy + Bz ûz ) =
A
= (Ay Bz −Az By )ûx −(AxBz −Az Bx)ûy +(AxBy −Ay Bx)ûz
In forma compatta può essere scritto
ûx ûy ûz ~
~
A × B = Ax Ay Az Bx By Bz ~eB
~ giacciono nel piano xy, si ha
Se A
~×B
~ = (AxBy − Ay Bx)ûz
A
16
Vettori
Matrici e determinanti
Una matrice è una tabella di numeri ordinati per righe e per
colonne
a11 a12 a13
A = a21 a22 a23
a31 a32 a33
dove in aij i è l’indice di riga e j l’indice di colonna
Per ogni matrice quadrata si definisce il determinante
a11 a12 a13 det(A) = a21 a22 a23 =
a31 a32 a33 a22 a23 a21 a23 a21 a22 − a12 + a13 =
= a11 a32 a33
a31 a33
a31 a32 = a11(a22a33−a23a32)−a12(a21a33−a23a31)+a13(a21a32−a31a22)
Derivata di un vettore
All’istante t la particella è in P e all’istante t0 si sposta in P 0
Il vettore differenza è
17
Vettori
∆~r = ~r(t0) − ~r(t)
Quando ∆t = t0 − t → 0 il vettore ∆~r/∆t, che è diretto
come la corda, tende al vettore velocità d~r/dt diretto lungo la
tangente alla traiettoria nel punto A
~v (t) =
d~r
dt
derivata rispetto al tempo del vettore ~r
Quando
~r(t) = r(t)ûr
si ottiene
~v (t) =
d~r(t) dr(t)
dûr
=
ûr + r
dt
dt
dt
Quando
~r(t) = x(t)ûx + y(t)ûy
si ottiene
d~r(t) dx(t)
dy(t)
~v (t) =
=
ûx +
ûy = vxûx + vy ûy
dt
dt
dt
ESEMPIO: moto circolare uniforme
(3.2)
18
Vettori
~r(t) = r(t)ûr
se ~r ruota con velocità costante (in modulo) si può scrivere
ûr = cos ωtûx + sin ωtûy
ω velocità angolare costante e θ = ωt
Essendo dr/dt = 0 si ottiene dalla (3.2)
dûr
d cos ωt
d sin ωt
ûx +
ûy
=r
~v (t) = r
dt
dt
dt
quindi
~v (t) =
d~r(t)
= r(−ω sin ωtûx + ω cos ωtûy )
dt
Equilibrio
4
19
Equilibrio di un corpo rigido
Momento di una forza (momento meccanico)
Si definisce τ momento della forza F~ rispetto al punto O la
grandezza
~τ = ~r × F~
In modulo τ = F r sin θ = F b (Forza per braccio)
Dimensionalmente [M ][L]2[T ]−2
Se ~r e F~ giaciono nel piano xy
ûx ûy ûz rx ry = ûz (rxFy − ry Fx)
~τ = rx ry rz = ûz Fx Fy Fx Fy Fz ~
Si può anche scrivere |~τ | = r(F sin θ) = r F~⊥
20
Equilibrio
Soltanto la componente di F~ ⊥ a ~r contribuisce al momento
Quando θ = 0 (~r e F~ paralleli) o θ = π (~r e F~ antiparalleli)
risulta ~τ = 0
Invertendo il verso di F~ si inverte il verso di ~τ , ma |~τ | resta
invariato
Invertendo il verso di ~r si inverte il verso di ~τ , ma |~τ | resta
invariato
Invertendo il verso sia di F~ che di ~r, ~τ resta invariato
ESEMPIO: Un oggetto puntiforme di massa m che cade da
ferma dalla posizione a)
b
O
a)
y
θ
r
m
θ
x
F=mg
21
Equilibrio
~τ = ~r × F~ = −ûz rF sinθ = −ûz mgb
ESEMPIO: Determinare il momento applicato
|~r| = 0.45m; F~ = 6N
ûx
ûy
ûz ûx
ûy ûz ~τ = r cos θr rsinθr 0 = 0.289 0.345 0 = −0.925ûz N m
F cos θF F sinθF 0 5.196 3
0 Momento di più forze concorrenti
22
Equilibrio
~τi = ~r × F~i
~ dove R
~ = F~1 + F~2 +
Il momento della risultante è ~τ = ~r × R
F~3 + · · ·
Quindi
~ = ~r×(F~1+F~2+F~3+· · · ) = ~r×F~1+~r×F~2+~r×F~3+· · · =
~τ = ~r×R
X
~τi
~τ1 + ~τ2 + ~τ3 + · · · =
i
Un sistema di forze concorrenti può essere sostituito da una
singola forza (rotazione +traslazione)
Coppia di forze
Stessa direzione e verso opposto
F~1 = −F~2
~ ~ F 1 = F 2 ~ = F~1 + F~2 = 0
R
23
Equilibrio
~τ = ~τ1 + ~τ2 = ~r1 × F~1 + ~r2 × F~2 = (~r1 − ~r2) × F~1 = ~b × F~1
~b = (~r1 − ~r2) braccio della coppia non dipende dalla scelta di
O. Il sistema non può essere ricondotto a un’unica forza. Un
sistema di forze può essere sempre ridotto a una forza.
~ e da una coppia ~τ . R
~ applicata in O rende conto della
R
traslazione mentre ~τ rende conto della rotazione.
Composizione di forze parallele
~ =
R
3
X
F~i = F~1 + F~2 + F~3
i=1
Il momento - diretto come l’asse z - rispetto al punto O risulta
τz =
3
X
i=1
xi F i = x1 F 1 − x2 F 2 + x3 F 3
24
Equilibrio
Il sistema di forze risulta equivalente alla risultante
P3
xi Fi
~ quando τz = xc R
~ , quindi xc = τz = Pi=1
R
. Nel caso
3
|R~ |
i=1 Fi
tridimensionale le coordinate di C diventano
Pn
Pn
Pn
xi F i
i=1 yi Fi
i=1 zi Fi
P
P
xc = Pi=1
;
y
=
;
z
=
;
c
c
n
n
n
i=1 Fi
i=1 Fi
i=1 Fi
vettorialmente
Pn
r~iFi
~rc = Pi=1
n
i=1 Fi
C è denominato centro delle forze parallele
ESEMPIO
3
X
~
Fi = F1 − F2 + F3 = 400N
R =
i=1
xc =
xc =
P3
x i Fi
Pi=1
3
i=1 Fi
P3
xi F i
Pi=1
3
i=1 Fi
= 0.29 m rispetto ad A
= 0.09 m rispetto ad D
25
Equilibrio
~ è applicata nello stesso punto indipendentemente dal sisteR
ma di riferimento
Centro di Massa
In prossimità della terra su ogni particella di massa mi di
un corpo è agisce una forza denominata peso diretta verso il
centro della terra
~ i = mi~g
W
~ i sono fra
In presenza di un corpo non molto esteso, le forze W
loro parallele
n
n
X
X
~ =
~i =
W
W
mi~g
i=1
i=1
~ è il risultante delle forze peso applicato in un punto
Dove W
- denominato centro di massa- definito da
Pn
Pn
n
X
~
r
(m
g)
~
r
m
1
i
i=1 i
i=1 i i
P
~rc = P
=
=
~rimi
n
n
m
g
m
M
i
i
i=1
i=1
i=1
Il centro di massa è indipendente dal sistema di riferimento
ma dipende esclusivamente dalla massa delle particelle e dalla
loro posizione relativa.
In presenza di un corpo continuo costituito da particelle di
massa infinitesima
R
Pn
~rdm
ri
i=1 ∆mi~
R
P
=
~rc = lim
n
∆m→0
∆m
dm
i
i=1
Z
1
~rc =
~rdm
M
26
Equilibrio
Nei corpi omogenei il centro di massa giace sull’asse di simmetria ove presente. Esempio:
• sfera: c.m. coincide con centro geometrico
• cono,piramide: c.m. lungo asse di simmetria ad 41 h dalla
base
ESEMPIO:
y
m3=3Kg
(1/2,√3/2)
(1,0)
m1=1Kg
m2=2Kg
x
Determinare le coordinate del centro di massa
xc =
yc =
P3
mi x i
Pi=1
3
mi
P3 i=1
mi yi
Pi=1
3
i=1 mi
=
=
7
12 m
√
3
4 m
Perché c.m. non coincide con il centro geometrico?
In un corpo in moto (rotatorio+traslatorio) il c.m. si muove
come si muoverebbe un singolo punto materiale di massa pari
alla massa del corpo soggetto alle stesse forze esterne
27
Equilibrio
Si può determinare il centro di massa anche per corpi non
rigidi
il centro di massa coincide con il centro di gravità (il punto
dove agisce la risultante delle forze di gravità) quando il corpo
non è molto esteso
Equilibrio di una particella
Pn
Pn
~
una
si trova
in equilibrio se i=1 Fi = 0 cioè i=1 Fx =
Pparticella
P
0; ni=1 Fy = 0; ni=1 Fz = 0 Quando su una particella agiscono tre forze, affinchè la particella si trovi in equilibrio le tre
forze devono essere complanari
F1
F2
F3
=
=
sin α sin β sin γ
28
Equilibrio
Equilibrio di un corpo rigido
Un corpo rigido si trova in equilibrio meccanico quando non è
soggetto ad accelerazioni lineari e angolari, cioè
• la somma vettoriale di tutte le forze esterne è nulla
F~ = F~1 + F~2 + F~3 + · · · = 0
Fx = F1 x + F2 x + F3 x + · · · = 0
Fy = F 1 y + F2 y + F 3 y + · · · = 0
Fz = F1 z + F2 z + F3 z + · · · = 0
• la somma vettoriale di tutti i momenti delle forze esterne
che agiscono sul corpo è nulla
~τ = ~τ1 + ~τ2 + ~τ3 + · · · = 0
τx = τ 1 x + τ2 x + τ3 x + · · · = 0
τy = τ1 y + τ2 y + τ3 y + · · · = 0
τ z = τ1 z + τ2 z + τ 3 z + · · · = 0
Qualora le forze esterne siano complanari (piano xy), le sei
equazioni scalari si riducono a tre equazioni Fx = 0; Fy =
0; τz = 0
Cinematica
5
29
Cinematica
La cinematica iè quel ramo della fisica che descrive il moto
dei corpi.
La dinamica studia la relazione tra il moto di un corpo e le
cause che lo producono
Si considera in generale il moto di un oggetto molto piccolo
-denominato particella o punto materiale- per evitare moti
rotazionali o vibrazionali
Per descrivere il moto di un oggetto si deve definire il sistema di
riferimento XY Z. Diversi sistemi di riferimento osservano
in generale diversi moti di uno stesso oggetto
30
Cinematica
Moto rettilineo: velocità
La traiettoria è una linea retta
vmedia
x0 − x ∆x
= 0
=
t −t
∆t
Velocità istantanea
v = lim vmedia
∆t→0
∆x
= lim
∆t→0 ∆t
dx(t)
v(t) =
dt
La velocità istantanea è la derivata dello spostamento rispetto
al tempo
il segno di v indica il verso lungo la retta orientata
Se è noto v = v(t), integrando
Rt
Rx
x0 dx = t0 v(t)dt
Rx
x0 dx = x − x0
Z t
x(t) = x0 +
v(t)dt
t0
Le dimensioni di v sono [L][T ]−1 nel S.I.
m
s
31
Cinematica
NOTA: Verificare sempre l’omogeneità dimensionale delle equazioni scritte e indicare sempre le unità di misura nella risoluzione dei problemi
ESEMPIO: Una particella si muove lungo una retta orientata
in accordo con la legge oraria x(t) = 5t2 + 1. Sia t0 = 2s
calcolare
a)velocità media tra t0 e 3s
∆x x − x0
m
vmedia =
=
= 25
∆t
t − t0
s
b)velocità media tra t0 e 2.1s
∆x
m
= 20.5
∆t
s
c)velocità media tra t0 e 2.001s
vmedia =
∆x
m
vmedia =
= 20.005
∆t
s
d)velocità media tra t0 e 2.00001s
vmedia
∆x
m
=
= 20.00005
∆t
s
e)velocità istantanea
v = dx
dt = 10t
vt=t0 = 20 ms
Moto rettilineo: accelerazione
Se v = costante ⇒ moto rettilineo uniforme
Nel caso di velocità variabile
32
Cinematica
Si definisce l’accelerazione media
v 0 − v ∆v
amedia = 0
=
t −t
∆t
la variazione della velocità per unità di tempo nell’intervallo
∆t Accelerazione istantanea
∆v
∆t→0
∆t→0 ∆t
dv(t)
d dx(t)
d2x(t)
a=
= (
)=
dt
dt dt
dt2
L’accelerazione istantanea è la derivata della velocità istantanea rispetto al tempo
Se a = costante ⇒ moto rettilineo uniformemente accelerato
Se è noto a = a(t), risulta
Rv
Rt
v0 dv = t0 a(t)dt
Rv
v0 dv = v − v0
Rt
v = v0 + t0 a(t)dt
a = lim amedia = lim
Se è noto a = a(x),risulta
dv = a(x)dt
v = dx
dt
vdv = va(x)dt = a(x)dt dx
dt = a(x)dx
33
Cinematica
Integrando
Z
v
Z
x
vdv =
v0
1 2 1 2
v − v0 =
2
2
a(x)dx
Zx0x
a(x)dx
x0
Le dimensioni di a sono [L][T ]−2 nel S.I.
Moto accelerato e decelerato
• Moto accelerato va > 0
• Moto ritardato va < 0
In forma vettoriale
dx
~v = î
dt
dv
~a = î
dt
m
s2
34
Cinematica
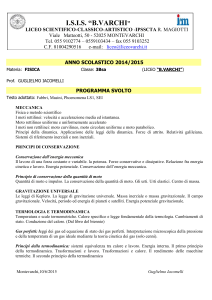
Moto rettilineo uniforme
dv
a=
= 0; v = cost
dt
quindi
t
Z
x = x0 +
t
Z
dt = x0 + v(t − t0)
v(t)dt = x0 + v
t0
t0
25
2
20
1,5
15
v=costante
v (m/s) 1
x(m)
x = x0 +v(t-t0 )
tangente dx/dt=v
10
x0
0,5
5
α
0
0
0
5
10
15
t (s)
20
0
25
t0 5
10
15
20
25
t (s)
v = tan α
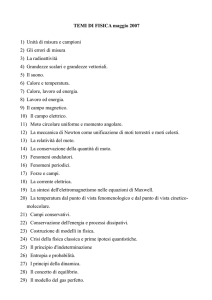
Moto rettilineo uniformemente accelerato
dv
a=
= costante
dt
Si ha quindi
Z
t
v = v0 +
Z
t
dt = v0 + a(t − t0)
a(t)dt = v0 + a
t0
t0
35
Cinematica
Z
x = x0 +
t
Z
t
v(t)dt = x0 + [v0 + a(t − t0)]dt =
t0
t0
Z t
Z t
= x0 +
v0dt +
a(t − t0)dt =
t0
t0
Z t
Z t
= x0 + v0
dt + a (t − t0)dt =
t0
t0
1
= x0 + v0(t − t0) + a(t − t0)2
2
Nel caso t0 = 0 e x0 = 0 si ottiene
1
v = v0 + at x = v0t + at2
2
consistenza dimensionale
[L] = [L][T ]−1[T ] + [L][T ]−2[T ]2 = [L]
Ricordando che
1 2 1 2
v − v0 =
2
2
Z
x
a(x)dx
x0
qualora risulti a = cost si ha
1 2
2v
2
− 21 v02 = a(x − x0)
v = v02 + 2a(x − x0)
Graficamente
36
Cinematica
25
2
20
1,5
a=costante
da/dt=0
a (m/s2)
v = v0 +at
tangente dv/dt=a
15
v (m/s)
1
10
0,5
5
0
0
0
5
10
t (s)
15
20
0
25
5
10
t (s)
15
20
25
250
200
150
x (m)
x = v0 t+1/2at2
tangente dx/dt=v
100
50
0
-50
0
5
10
t (s)
15
20
25
ESEMPIO: Sia data la posizione (m) lungo una retta orientata
in funzione del tempo (s) di una particella
x = 2t3 + 5t2 + 5
determinare a,v,am e vm tra gli istanti 2 e 3
d(2t3 +5t2 +5)
dx
v = dt =
= 6t2 + 10t( ms )
dt
d(6t2 +10t)
m
dv
=
12t
+
10(
a = dt =
)
dt
s2
a t = 2s
a t = 3s
m
m
x = 41m; v = 44 ; a = 34 2
s
s
m
m
x0 = 104m; v 0 = 84 ; a0 = 46 2
s
s
vm =
am =
∆x
∆t
∆v
∆t
= 63( ms )
= 40( sm2 )
Cinematica
ESEMPIO:Moto in una dimensione
37
38
Cinematica
Moto curvilineo: velocità
dove
• s = spostamento lungo la traiettoria
• ∆s = arco di curva
• ∆~r = ~r 0 − ~r vettore spostamento
si definisce
r
~vmedia = ∆~
∆t
~vmedia k ∆~r
∆~r d~r(t)
=
∆t→0 ∆t
dt
~v (t) = lim ~vm = lim
∆t→0
39
Cinematica
in forma cartesiana
~v = vxûx + vy ûy + vz ûz
~r = xûx + y ûy + z ûz
dove
vx =
dx
dy
dz
; vy = ; vz = ;
dt
dt
qdt
|~v | = vx2 + vy2 + vz2
Considerando lo spostamento del punto lungo la traiettoria si
ha:
∆~r
∆~r ∆s
∆~r
∆s
= lim
= lim
lim
∆t→0 ∆t
∆t→0 ∆s ∆t
∆s→0 ∆s ∆t→0 ∆t
~ ∼
Poichè ∆r
= ∆s risulta
~v = lim
∆~r d~r
=
= ûT
∆s→0 ∆s
ds
lim
ûT versore tangente alla traiettoria inoltre
∆s ds
=
=v
lim
∆t→0 ∆t
dt
si può scrivere l’eq. (5.1) come
ds
~v = ûT = ûT v
dt
(5.1)
40
Cinematica
Moto curvilineo: accelerazione
Si definisce
v
~amedia = ∆~
∆t
~amedia k ∆~v
e l’accelerazione istantanea
~a = lim ~am
∆t→0
∆~v d~v (t)
=
= lim
∆t→0 ∆t
dt
• l’accelerazione è un vettore avente la stessa direzione
della variazione istantanea di velocità
• è diretta verso la concavità
• in generale non è né tangente né perpendicolare alla
traiettoria
In forma cartesiana
~a = axûx + ay ûy + az ûz
41
Cinematica
dove
dv
ay = dty ; az = dvdtz ;
q
|~a| = a2x + a2y + a2z
ax =
dvx
dt ;
Noto ~a = ~a(t) per ottenere ~v e ~r si integra ~a =
R ~v
Rt
v = t0 ~a(t)dt
~v0 d~
R ~r
Rt
r = t0 ~v (t)dt
~r0 d~
d~v
dt
e ~v =
d~r
dt
ottenendo
t
Z
~a(t)dt
~v = ~v0 +
t0
Z
t
~v (t)dt
~r = ~r0 +
t0
Corpi in caduta libera
Tutti i corpi in prossimità della terra (h RT ) cadono con la
stessa accelerazione, indipendentemente dal loro peso e dalla
loro forma
m
~g = −9.8ûz ( 2 )
s
~g è diretta verso il centro della terra
Aristotele (v ∝ peso) ⇒ Galileo (v indipendente dal peso)
ESEMPIO: caduta libera. Un oggetto cade partendo da fermo.
Determinare posizione e velocità dopo 1,2 e 4s.
42
Cinematica
Scegliamo l’origine nel punto di partenza. Si avrà z = v0t −
1 2
2 gt
t
z
v
a
s
m
m/s
m/s2
0
0
0
-9,8
1
-4,9
-9,8
-9,8
2
-19,6
-19,6
-9,8
3
-44,1
-29,4
-9,8
4
-78,4
-39,2
-9,8
43
Cinematica
t = 1s ⇒
z = −4.9m
vz = vz0 − gt = −9.8 ms
t = 2s ⇒
z = −19.6m
vz = −19.6 ms
t = 3s ⇒
z = −44.1m
vz = −29.4 ms
t = 4s ⇒
z = −78.4m
vz = −39.2 ms
Moto con accelerazione costante
~ risulta
Se ~a = cost
~a =
d~v
;
dt
d~v = ~adt
d~v =
Rt
integrando
R ~v
~v0
~v − ~v0 =
adt
t0 ~
Rt
~a t0 dt
~v = ~v0 + ~a(t − t0)
~v appartiene al piano individuato da ~v0 e ~a
inoltre
d~r
r = ~v dt
dt ; d~
R ~r
Rt
r = t0 [~v0 + ~a(t − t0)]dt
~r0 d~
Rt
Rt
= ~r0 + ~v0 t0 dt + ~a t0 (t − t0)dt
~v =
~r
(5.2)
44
Cinematica
1
~r = ~r0 + ~v0(t − t0) + ~a(t − t0)2
2
L’estremo di ~r giace nel piano ~v0 e ~a
Quindi se ~a = cost si ha
1. moto in un piano
2. moto parabolico y = ax2 + bx + c
(5.3)
45
Cinematica
Moto dei proiettili
Si ha
~a = ~g = −ûy g
e
~v0 = ûxv0x + ûy v0y
dove
v0x = v0 cos α
v0y = v0 sin α
Dalla eq.(5.2) ponendo t0 = 0 risulta
vx = v0x = cost
vy = v0y − gt
(5.4)
(5.5)
x = v0x t
y = v0y t − 21 gt2
(5.6)
(5.7)
Dalla eq. (5.3) risulta
46
Cinematica
L’equazione del moto sostituendo la (5.6) nella (5.7) risulta
x
1
g
v0 sin α
1 x2
y = v0y
x − 2 2 x2 =
− g 2 =
v0x 2 v0x v0 cos α
2 v0 cos α
g
− 2 2 x2 + x tan α
2v0 cos α
parabola passante per l’origine con concavità rivolta verso il
basso
Massima altezza
Ponendo vy = 0 nella (5.5) si ottiene l’istante in cui si raggiunge la massima altezza
v0y v0 sin α
=
(5.8)
th =
g
g
sostituendo th nella (5.7) otteniamo la massima altezza raggiunta
1 2 v02 sin2 α
(5.9)
h = v0y th − gth =
2
2g
Il valore più elevato della massima altezza è ottenuto per α = π2
Tempo di volo
il tempo di volo è il doppio del tempo impiegato a raggiungere
la massima altezza. Dalla (5.8)
2v0 sin α
(5.10)
tvolo = 2th =
g
Gittata
Sostituendo tvolo nella (5.6) si ottiene la gittata
R = v0x tvolo
2v0 sin α 2v02 sin α cos α v02 sin 2α
= v0x
=
=
g
g
g
(5.11)
47
Cinematica
La massima gittata Rmax è ottenuta quando α =
Rmax
π
4
v02
v02
= ; h=
g
4g
I risultati ottenuti sono validi quando
1. gittata bassa rispetto alla curvatura della terra
2. h RT per assumere g = cost
3. si trascura l’attrito dell’aria
4. si trascura il moto di rotazione della terra
Accelerazione tangenziale e normale
~a = ~at + ~an
• ~at=accelerazione tangenziale (variazione |~v |)
• ~an=accelerazione normale (variazione direzione di ~v )
Infatti
48
Cinematica
Poichè ~v = ûtv risulta
d~v d(ûtv)
dv dût
=
= ût +
v
dt
dt
dt
dt
essendo sin α ≈ α per α → 0 risulta
~a =
(5.12)
|dût| = |ût| sin dφ ≈ |ût| dφ = dφ
dût = ûndφ
dφ
dût
û
=
n
dt
dt
dφ ds
dφ
dφ
=
=
v
dt
ds dt
ds
(5.13)
(5.14)
(5.15)
(5.16)
Dalla definizione di angolo piano dφ =
dφ 1
=
ds ρ
sostituendo nella (5.16) risulta
dφ v
=
dt
ρ
sostituendo nella (5.15)
dût
v
= ûn
dt
ρ
ds
ρ,
quindi
49
Cinematica
l’accelerazione (5.12) risulta
dv
v2
~a = ût + ûn = ûtat + ûnan
dt
ρ
dv
at =
dt
2
v
an =
ρ
• moto circolare uniforme (|~v | = cost) ⇒ at = 0
• moto rettilineo (direzione ~v = cost) ⇒ an = 0
Moto circolare:velocità
risulta s = Rθ e
~v = v ût =
ds
dθ
ût = R ût
dt
dt
Si definisce la velocità angolare ω
dθ −1
ω=
[s ]
dt
50
Cinematica
v = ωR
Se il moto è periodico si definiscono
• P = periodo(tempo necessario per compiere un giro)
• ν = P1 =frequenza (numero di giri per unità di tempo) s−1, Hz, rpm, min−1
Se ω = cost il moto è circolare uniforme e risulta
Rθ
Rt
Rt
θ0 dθ = t0 ωdt = ω t0 dt
θ(t) = θ0 + ω(t − t0)
ponendo θ0 = 0 e t0 = 0 si ha θ = ωt
θ 2π
ω= =
= 2πν
t
P
Si definisce il vettore ω
~ come in figura
51
Cinematica
risulta
~
~v = ω
~ × ~r = ω
~ ×R
(5.17)
v = ωr sin γ = ωR
Moto circolare: accelerazione
Risulta ~a = ~an + ~at dove
v 2 ω 2 R2
an =
=
= ω 2R
R
R
dv
dω
at =
=R
dt
dt
L’accelerazione ~an è denominata accelerazione centripeta.
Si definisce accelerazione angolare α (analogamente alla
lineare)
α=
e vettorialmente
dω
dt
52
Cinematica
d~ω
α
~=
dt
Si ha
d~v d(~ω × ~r) d~ω
d~r
~a =
=
=
× ~r + ω
~×
=α
~ × ~r + ω
~ × ~v =
dt
dt
dt
dt
=α
~ × ~r + ω
~ × (~ω × ~r) (5.18)
Nel moto circolare uniforme risulta α = 0,at = 0 e
~a = ~an = ω
~ × (~ω × ~r) = ω
~ × ~v
Poichè ω
~ ⊥~v si ha
|~a| = ωv = ω 2R
ESEMPIO:Determinare an e at dei punti sul bordo del disco,
sapendo che a t = 0 risulta v = 0.04 ms e che a t = 2s risulta
x = 0.2 m
53
Cinematica
Si ha
1
1
x = vO t + at2 = 0.04t + at2[m]
2
2
risolvendo rispetto ad a e introducendo t = 2s ,x = 0.2 m, si
ottiene a = 0.06 sm2 ,quindi
x = 0.04t + 0.03t2 [m]
m
v = dx
=
0.04
+
0.06t
[
dt
s]
m
at = dv
=
0.06
[
]
dt
s2
v2
ρ
(0.04+0.06t)2
0.1
an = =
=
= 0.016 + 0.048t + 0.036t2 [ sm2 ]
ESEMPIO: Determinare in funzione della latitudine,~v e ~a di
un punto posto sulla superficie terrestre.
54
Cinematica
Si ha
R = r cos λ = BA dove λ=latitudine
v = ωR = ωr cos λ tangente alla circonferenza
a = ω 2R = ω 2r cos λ accelerazione centripeta
Poichè r = 6370 × 103m e ω = 7.292 × 10−5 s−1, risulta
v = 459 cos λ [ ms ]
3
a = 3.34 × 10−2 ≈ 1000
g [ sm2 ]
Moto curvilineo generico nel piano
55
Cinematica
Scomponendo il moto da P a P 0 lungo le direzioni perpendicolari individuate da d~r e rdθ si può scomporre la velocità
in
• vr =
dr
dt
• vθ =
dθ
dt r
velocità radiale
velocità trasversale
ovvero
~v = ûr
dθ
dr
+ ûθ r
dt
dt
dove
r che tiene conto
• ûr dr
dt è un vettore avente la direzione di ~
dello spostamento radiale
• ûθ dθ
r che tiene conto
dt r un vettore avente la direzione ⊥ a ~
della variazione di direzione di ~r, cioè dello spostamento
angolare
Nel moto circolare è presente soltanto la componente trasversa
vθ = dθ
dt r = ωr
56
6
Cinematica relativa
Cinematica relativa
In passato si è ricercato un sistema di riferimento assoluto in
quiete rispetto all’etere
Oggi si considerano sistemi di riferimento inerziali. Essi sono
in moto rettilineo uniforme rispetto alle stelle fisse.
Velocità relativa
d~rB
d~rA
~vA =
; ~vB =
dt
dt
La velocità relativa di B rispetto ad A risulta
~vBA
d~rBA
=
dt
dove
~rBA = ~rB − ~rA
essendo
~rBA = −~rAB
(6.1)
57
Cinematica relativa
si ha
~vBA = −~vAB
cioè la velocità di B rispetto ad A è uguale in modulo e direzione ma di verso opposto rispetto alla velocità di A rispetto
aB
Inoltre dalla (6.1) si ha
d~rBA d~rB d~rA
=
−
dt
dt
dt
cioè
~vBA = ~vB − ~vA
e
d~vBA d~vB d~vA
=
−
dt
dt
dt
cioè
~aBA = ~aB − ~aA
dove ~aBA è l’accelerazione di B rispetto ad A
ESEMPIO: si abbiano due aerei
58
Cinematica relativa
vA = 300 Kmh−1;
vB = 200 Kmh−1
Determinare le velocità relative ~vAB e ~vBA
Risulta
• ~vAB = ~vA − ~vB velocità di A rispetto a B
• ~vBA = ~vB − ~vA velocità di B rispetto a A
Si nota come ~vBA = −~vAB
In modulo
r
π
vAB = vA2 + vB2 − 2vAvB cos = 264.6 Kmh−1
3
in direzione
vB
sin α
sin α =
vB sin π3
vAB
=
vAB
sin π3
= 0.655;
α = 40.7!‘
Moto relativo traslatorio uniforme. Trasformazione Galileana
59
Cinematica relativa
~v = cost;
per t = 0 sia O ≡ O0
~ = ~v t e quindi
~0 = R
Sarà 00
~r = ~v t + ~r0
(6.2)
cioè ~r0 = ~r − ~v t
si suppone t = t0 e si definisce per P:
d~r
~
V = ;
dt
derivando la (6.2) si ha
0
d~
r
V~ =
dt
0
V~ = V~ 0 + ~v
(6.3)
le cui componenti cartesiane sono
Vx00 = Vx − vx;
Vy00 = Vy ;
Vz00 = Vz
Le velocità sono denominate
• V~ : velocità assoluta
• V~ 0: velocità relativa
• ~v : velocità di trascinamento
L’accelerazione di P rispetto a O e O0 risulta
dV~
dV~ 0
0
~a =
; ~a =
dt
dt
derivando la (6.3) si ottiene
~a = ~a0
(6.4)
60
Cinematica relativa
le cui componenti cartesiane sono
a0x0 = ax;
a0y0 = ay ;
a0z 0 = az
In accordo alla trasformazione Galileana l’accelerazione di una
particella è la stessa per tutti gli osservatori in moto relativo
traslatorio uniforme
ESEMPIO: Un aereo sta volando rispetto alla torre di controlkm
in presenza di un vento da S
lo in direzione N-E a V = 3 min
alla velocità di 52 km
h . Calcolare la velocità dell’aereo rispetto
all’aria
N
y
v
V
V'
u
π/4
y
θ
u
x
x
E
S fisso rispetto a torre di controllo
S 0 in movimento come il vento
km
|~v | = 52
h
km
km
~ = 180
V = 3
min
h
risulta
π
π
V~ 0 = V~ − ~v = 180(cos ûx + sin ûy ) − 52ûy
4
4
km
h
Cinematica relativa
Per determinare l’angolo θ si utilizza
~ V cos π4 = V~ 0 cos θ
180 cos π4 = 148 cos θ
quindi θ = 30.7!‘
61
62
7
Dinamica del punto materiale
Dinamica di una particella
La cinematica studia il moto delle particelle senza occuparsi
delle cause che lo generano
La dinamica studia la relazione tra il moto di un corpo e le
cause di questo moto
Il moto di un corpo é il risultato diretto delle sue interazioni
con gli altri corpi circostanti
Le interazioni sono espresse quantitativamente nei termini di
un concetto chiamato forza
Lo studio della dinamica é fondamentalmente l’analisi della
relazione tra le forze e i moti dei corpi
Principio di inerzia (Prima legge di Newton)
Lo studio del moto dei corpi é sempre stato difficoltoso in
quanto:
• esiste sempre l’attrito
• la forza di gravitá agisce sempre
• é difficile isolare una particella
Aristotele (IV a.C.):’Un corpo in moto si arresta quando la
forza che lo spinge cessa di agire’
Si pensava sbagliando ad un legame diretto
forza → velocitá
Dinamica del punto materiale
63
Prima di Galileo si pensava che per mettere in moto un corpo
fosse necessaria una qualche azione esterna o forza. Lo stato
naturale era la quiete. Un corpo in moto rettilineo uniforme
avrebbe dovuto essere costantemente sollecitato da una forza
esterna senza a quale si sarebbe fermato.
Galilei (XV d.C.):’Un corpo permane nel suo stato di quiete o
di moto rettilineo uniforme, a meno che forze agenti su di esso
non lo costringano a cambiare stato’
Enunciato equivalente alla
F~ = 0; ~a = 0 (~v = cost)
sostanzialmente coincidente con il principio di inerzia (primo
principio della dinamica; prima legge di Newton):
”Una particella libera si muove sempre con velocitá costante, cioé senza accelerazione”
Con il termine particella libera si intende una particella non
interagente con altre particelle
L’osservazione del moto della particella é effettuato da un osservatore inerziale, cioé non soggetto a interazioni con l’esterno
Il sistema di riferimento solidale con esso é detto sistema di
riferimento inerziale
Un sistema di riferimento inerziale é non accelerato e quindi
non ruotante
Si definisce il sistema di riferimento delle stelle fisse come un
ottimo sistema di riferimento inerziale
Ogni sistema di riferimento in moto traslatorio uniforme rispetto alle stelle fisse o ad un altro sistema di riferimento
inerziale é a sua volta un sistema di riferimento inerziale
64
Dinamica del punto materiale
La trasformazione galileana collega sistemi di riferimento inerziali in moto traslatorio uniforme con velocitá ~v (|~v | c)
0
~r = ~r − ~v t
V~ 0 = V~ − ~v
0
~a = ~a
La Terra non é un sistema di riferimento inerziale in quanto
ruota intorno al proprio asse e intorno al Sole. Le accelerazioni
sono:
• at ≈ 0 an = a = ω 2R = 0.6 cm
s2
accelerazione nel moto attorno al Sole
• at = 0 an = a = ωT2 RT = 3.4 cm
s2
accelerazione nel moto attorno al proprio asse
Il Sole non é un sistema di rifermento inerziale in quanto ruota
intorno al centro della galassia con accelerazione a = ω 2R =
3 10−8 cm
s2
L’approssimazione del Sole a sistema di riferimento inerziale é
molto migliore di quella della Terra
In molti casi gli effetti della rotazione della Terra sono trascurabili e i sistemi di riferimento solidali a osservatori terrestri
possono essere considerati inerziali senza grande errore
Massa
Supponiamo che un sistema di riferimento inerziale osservi
il moto di due particelle soggette soltanto alla loro mutua
interazione, isolate dal resto del mondo
65
Dinamica del punto materiale
Nell’intervallo ∆t = t0 − t si ha
∆~v1 = ~v10 − ~v1
∆~v2 = ~v20 − ~v2
Sperimentalmente si determina che
∆~v1 = −K∆~v2
(7.1)
dove K è costante per ogni coppia di particelle
La relazione (7.1) non dipende da
• velocità delle particelle
• intervallo di tempo ∆t
• traiettoria delle particelle
Scegliendo una particella come riferimento (0) e facendola interagire con le particelle (1),(2),(3),. . . in modo che ∆~v0 sia la
variazione di velocità della particella (0), si determinano i valori Ki per ogni coppia 0-1,0-2,0-3,. . .
Si ricava:
∆~v0 = −m1∆~v1 ; ∆~v0 = −m2∆~v2 ; ∆~v0 = −m3∆~v3 ; . . .
66
Dinamica del punto materiale
m1, m2, m3, . . . sono definite masse inerziali delle particelle
(1),(2),(3),. . . nella unità della massa di riferimento m0 = 1
Caratterizzano il comportamento dinamico dei corpi sottoposti a interazioni
La massa è una grandezza scalare
Si determina inoltre sperimentalmente che:
∆~v1 = −
m2
∆~v2
m1
(7.2)
Massa inerziale e massa gravitazionale
La massa gravitazionale è misurata in un campo gravitazionale
tramite la bilancia a bracci uguali:
• caratterizza l’intensità della attrazione gravitazionale
• è una proprietà statica dei corpi
Sperimentalmente si determina che la massa inerziale coincide con la massa gravitazionale
entrambe si misurano in Kg (SI)
La massa è una proprietà intrinseca dei corpi
Quantità di moto
Tramite il concetto di massa inerziale introduciamo una nuova
grandezza fisica denominata quantità di moto:
p~ = m~v
[M ][L][T ]
−1
Kg m
s
Dinamica del punto materiale
67
É una quantità vettoriale che ha la stessa direzione della velocità e combina i due elementi che caratterizzano lo stato
dinamico di una particella.
Il principio di inerzia può essere riformulato:
In un sistema di riferimento inerziale una particella libera
si muove sempre con quantità di moto costante
In un sistema costituito da n particelle di quantità di moto
p~1 = m1~v1, p~2 = m2~v2, . . ., la quantità di moto totale è data
da:
n
X
p~i = p~1 + p~2 + . . .
P~ =
i=1
Principio di conservazione della quantità
di moto
É uno dei principi fondamentali della Fisica
Considerando l’interazione tra due particelle
68
Dinamica del punto materiale
∆~p1 = p~01 − p~1 = m1~v10 − m1~v1
∆~p2 = p~02 − p~2 = m2~v20 − m2~v2
rappresentano le variazioni delle quantità di moto nell’intervallo ∆t = t0 − t
Dalla evidenza sperimentale della (7.2) si ricava
∆~p1 = m1∆~v1 = −m2∆~v2 = −∆~p2
cioè
∆~p1 = −∆~p2
(7.3)
Un’interazione produce uno scambio di quantità di moto
La (7.3) può essere scritta come:
p~01 − p~1 = −(~p02 − p~2)
p~1 + p~2 = p~01 + p~02
ovvero
p~1 + p~2 = cost
pix = pfx
piy = pf y
piz = pf z
La quantità di moto totale di un sistema composto da due
particelle sottoposte soltanto alla loro mutua interazione
rimane costante
Dinamica del punto materiale
69
Il principio è valido anche per un insieme di n particelle che
formino un sistema isolato:
P~ =
n
X
p~i = p~1 + p~2 + . . . = cost
i=1
La quantità di moto totale di un sistema isolato di particelle è costante
Come conseguenza si ha che la quantità di moto totale di un
sistema isolato di punti materiali non può variare per effetto
di interazioni fra i punti materiali stessi
L’applicazione del principio di conservazione della quantità di
moto risulta molto utile quando non sono note le interazioni
interne di un sistema isolato. Es: rinculo di un fucile che spara,
scoppio in volo di una bomba, urti fra particelle.
Non sono note eccezioni a questo principio generale di conservazione della quantità di moto (è valida anche a livello
atomico)
Seconda e Terza Legge di Newton
Dal principio di conservazione della quantità di moto si ha:
∆~p1 = −∆~p2
Dividendo ambo i membri per l’intervallo di interazione ∆t
∆~p1
∆~p2
=−
∆t
∆t
70
Dinamica del punto materiale
Passando al limite per ∆t → 0, si ottiene
d~p1
d~p2
=−
dt
dt
(7.4)
Newton introduce la dizione di forza come una quantità dinamica correlata alla variazione della quantità di moto. La forza
agente su una particella è:
d~p
F~ =
dt
(7.5)
La relazione (7.5) costituisce la seconda legge del moto di
Newton
La rapidità temporale della variazione della quantità di moto
di una particella è uguale alla forza che agisce sulla particella
La forza deve essere vista come un concetto matematico ed è
dovuta all’interazione della particella con le altre circostanti
Dalla (7.4) si ottiene
F~1 = −F~2
(7.6)
La relazione (7.6) costituisce la terza legge del moto di Newton o legge di azione e reazione:
Quando due particelle interagiscono, la forza sulla prima
particella esercitata dalla seconda particella è uguale ed
opposta alla forza sulla seconda particella esercitata dalla
prima particella
Le due forze giacciono sulla retta congiungente i due corpi
Dinamica del punto materiale
71
• F~1= forza agente sulla particella 1 dovuta all’interazione
con la particella 2
• F~2= forza agente sulla particella 2 dovuta all’interazione
con la particella 1
Poichè p~ = m~v , la (7.5) può essere scritta come
d(m~v )
~
F =
dt
se m = cost si ha
d~v
F~ = m = m~a
dt
(7.7)
La forza agente su una particella di massa costante è uguale al prodotto della massa della particella per la sua accelerazione
Se F~ = cost → ~a = cost cioè il moto è uniformemente
accelerato
Unità di misura della forza
72
Dinamica del punto materiale
• Nel S.I. si misura in Newton (N)
m Kg
1N =1
s2
• Nel sistema c.g.s si misura in dina (1 N = 105 dina)
• Nel sistema ingegneristico si misura in chilogrammo forza 1 Kgf = 9.8 N
Distinzione massa/peso
Un corpo di massa m in prossimità della terra è soggetto a
una forza di attrazione diretta verso il centro della terra:
~ = m~g
W
denominata ‘forza peso’ o ‘peso’ del corpo
1 Kgf è il peso di un corpo di massa 1Kg in prossimità della
superficie terrestre
Esiste una proporzionalità tra massa e peso di un corpo. Se
abbiamo un corpo di massa m = 1 Kg, il suo peso è
~ = m~g = 1 (Kg) × 9.8 (m/s2) = 9.8 N = 1 Kgf
W
ESEMPIO:Moto di un blocco su di un piano inclinato
• caso statico
Dinamica del punto materiale
73
Poichè ~a = 0 si ha:
~ +W
~ =0
F~ + N
Scegliendo il sistema di riferimento come in figura si
ottiene
F − W sin α = 0
N − W cos α = 0
• caso dinamico
~ = m~a
Si ha R
Rx = max ⇒ F − W sin α = max
Ry = may ⇒ N − W cos α = 0
74
Dinamica del punto materiale
ESEMPIO
Determinare l’accelerazione del sistema e la tensione della fune
Consideriamo il corpo m1. Le forze agenti su di esso sono
y
N
T
m1
x
F=m g
1
N − m1g = 0
T = m1a1x
Per determinare T consideriamo il corpo m2. Le forze agenti
su di esso sono
75
Dinamica del punto materiale
y
T
m2
F=m g
2
L’equazione del moto è
m2g − T = m2a2y
L’accelerazione dei due corpi è legata dalla relazione cinematica
a2y = a1x = a
Si ottiene
(
m2g − T = m2a
T = m1a
Da cui si ricava
m2
a=
g
m1 + m2
m2
T = m1
g
m1 + m2
Risulta a ≤ g con a = g quando m1 = 0
Forze di attrito
Le forze di attrito sono tipici fenomeni del mondo macroscopico
76
Dinamica del punto materiale
La loro presenza ineliminabile ha per lungo tempo reso difficile
la determinazione delle leggi del moto
Le forze di attrito
• si oppongono al moto
• derivano da leggi empiriche e non da leggi fisiche
• dipendono da fattori geometrici
• sono imprecise e hanno un intervallo di applicabilità
Si suddivide in
radente (tra due F = f N
solidi)
f=coeff.attrito
N=forza
contatto
l=coeff.attrito
v=velocità
t=coeff.attrito
v=velocità
di
nei fluidi (lamina- F = l v
re)
nei fluidi (turbo- F = t v 2
lento)
Attrito radente (di strisciamento)
Si manifesta quando un corpo solido scivola a contatto con un
altro
É dovuta all’interazione fra le molecole dei due corpi e si
oppone sempre al moto
• Blocco in quiete
Dinamica del punto materiale
F = F fs
• Moto accelerato
F > Ffd
• Moto uniforme
F = F fd
Sperimentalmente si verifica
F fs ≤ f s N
F f d = fd N
77
78
Dinamica del punto materiale
• fs (µs) coefficiente di attrito statico
• fd (µd) coefficiente di attrito dinamico
Si ha fs > fd
In generale f < 1
f è adimensionale
Ff e N sono fra loro perpendicolari
ESEMPIO: Un automobile si muove con velocità v0 lungo una
strada rettilinea orizzontale. Quale è la più breve distanza
entro cui l’automobile può essere frenata?
Si avrà un moto decelerato con accelerazione costante
v 2 = v02 + 2ax
Per v = 0 risulta
v02
x̃ = −
2a
Risulta N = mg; Ffd = fdN = fdmg
inoltre
Ffd = −ma
Quindi
a = −fdg
Dinamica del punto materiale
79
lo spazio di frenata diventa
v02
v02
x̃ = − =
2a 2gfd
Il rotore
Il gioco chiamato Rotore si trova in alcuni parchi divertimenti.
Il Rotore è una stanza cilindrica cava che ruota intorno al
proprio asse di simmetria.
Una persona entra nella stanza chiude la porta e si mette
contro la parete circolare. Il rotore inizia a girare raggiunta
una certa velocità il pavimento sotto alla persona si apre ma
la persona rimane appiccicata alla parete. Le forze agenti sono
(vedi figura) in modulo :
• mg = forza peso della persona
• Fs = forza d’attrito tra la persona e il rotore
• N = Forza normale esercitata dalla parete sulla donna
80
Dinamica del punto materiale
La legge di Newton lungo z è:
Fz = Fs − mg = 0
La legge di Newton radiale è:
−mv 2
Fr = −N = mar =
R
2
Siccome Fs = mg = µsN = µs mv
R
Oppure
p
v = gR/µs
Che è la velocità per cui la persona non scivola verso il basso
e come si nota non dipende dal suo peso.
Forze di attrito nei fluidi
Quando un corpo si muove in un fluido (gas o liquido) in
assenza di turbolenze subisce una forza d’attrito proporzionale
alla velocità
F~f = −Kη~v
F~f risulta
• proporzionale alla velocità
• dipendente dal fluido (η =viscosità)
• dipendente dalla geometria del corpo (K fattore geometrico)
Per una sfera di raggio r, si determina ( Legge di Stokes)
K = 6πr
81
Dinamica del punto materiale
Il coefficiente di viscosità dipende dall’attrito interno del fluido. Si misura in Nm2s = P a s
P a = mN2 (Pascal) unità di misura della pressione nel SI
coefficienti di viscosità (P a s)
Acqua (0◦C)
1.79 × 10−3
Alcool etilico (0◦C)
0.367 × 10−3
Aria (0◦C)
1.71 × 10−5
Idrogeno
0.93 × 10−3
Quando un corpo si muove attraverso un fluido viscoso sotto
l’azione di una forza F~ , l’equazione del moto diventa:
m~a = F~ − Kη~v
Se F~ = cost e il corpo parte da fermo, si produce una accelerazione che diminuisce all’aumentare della velocità
Dall’istante in cui F = Kηv il corpo procede di moto rettilineo uniforme
Risolvendo l’equazione del moto, si ha
m dv
dt = F− Kηv Kη
dv
F
=
−
v
−
dt
m
Kη
separando le variabili e integrando
R
R v dv
Kη t
v0 v− F = − m 0 dt
Kη
F
v− Kη
ln v
F
0 − Kη
F
v− Kη
F
v0 − Kη
= − Kη
mt
=e
− Kη
mt
82
Dinamica del punto materiale
sostituendo v0 = 0 si ottiene
F − Kη
t
1−e m
v=
Kη
Poichè il termine esponenziale tende a zero la velocità limite
(di regime) risulta
F
vL =
Kη
Dipende dalla viscosità del fluido e dalla forma del corpo
In un corpo in caduta libera cioè sotto l’azione della sola forza
di gravità, si ha
mg
vL =
Kη
Se si tiene conto della spinta idrostatica esercitata dal fluido,
uguale al peso del fluido spostato (Principio di Archimede), si
ottiene
F~R = m~g − mf ~g
quindi
(m − mf )g
vL =
Kη
Dinamica del punto materiale
83
Moto curvilineo
Nel moto curvilineo la direzione della velocità varia continuamente
La forza risultante forma un angolo diverso da zero con la velocità
Dalla cinematica
dv
v2
~a = ût + ûn = ûtat + ûnan
dt
ρ
dove
• ~at=accelerazione tangenziale (variazione |~v |)
• ~an=accelerazione normale (variazione direzione di ~v )
La forza totale agente sulla particella
2
dv
v
F~ = m~a = F~t + F~n = m ût + m ûn
dt
ρ
dove
• F~t=forza tangenziale
84
Dinamica del punto materiale
• F~n=forza normale (centripeta)
Nel moto rettilineo F~n = 0
Nel moto circolare uniforme
F~t = 0
F~n = mω 2R
Talvolta può essere più conveniente utilizzare le componenti
ortogonali di F~
Fx = max = m dvdtx
dv
Fy = may = m dty
Momento della quantità di moto (Momento angolare)
il momento della quantità di moto rispetto a un punto O di una
particella di massa m che si muove con velocità ~v si definisce
Dinamica del punto materiale
85
come il prodotto vettoriale
~ = ~r × p~ = m~r × ~v
L
(7.8)
~ è perpendicolare al piano formato da ~r e ~v
Il vettore L
Nel moto circolare, se O è il centro del cerchio, si ha
L = mrv = mr2ω
~ = mr2ω
L
~
~ ha la stessa direzione di ω
in quanto L
~
Nel moto curvilineo, scomponendo la velocità nelle componenti radiale e trasversale
86
Dinamica del punto materiale
si ha
~ = m~r × (~vr + ~vθ ) = m~r × ~vθ
L
solo la componente trasversale contribuisce al momento della
quantità di moto In quanto vθ = r dθ
dt risulta
L = mr2
dθ
dt
Derivando la (7.8) si ottiene
~
dL
d~r
d~p
=
× p~ + ~r ×
dt
dt
dt
poiché
d~r
dt
(7.9)
= ~v si ha
d~r
× p~ = ~v × p~ = m~v × ~v = 0
dt
di conseguenza la (7.9) diventa
~
d~p
dL
= ~r ×
= ~r × F~
dt
dt
ricordando la definizione di momento di una forza
~
dL
= ~τ
dt
(7.10)
(7.11)
87
Dinamica del punto materiale
~ devono essere calcolati rispetto allo stesso punto
~τ e L
~ si ricava una legge della diPer le quantitá angolari (θ, ω
~ , L)
namica analoga a quella determinata per le quantitá lineari
p
F~ = d~
dt
Si ha l’analogia
d~p
F~ =
dt
⇒
~
dL
~τ =
dt
La relazione (7.11) non costituisce un nuovo postulato fondamentale della meccanica ma una diversa espressione della
seconda legge di Newton
Forze centrali
Principio di conservazione della quantitá di moto
Quando il momento della forza risultante che agisce su una
particella é nullo (~τ = ~r × F~ = 0) si ha
~
dL
=0
dt
⇒
~ = cost
L
Quando il momento della forza risultante applicata ad una
particella è nullo il vettore momento angolare é costante
~τ = 0 quando
1. Moto rettilineo (particella libera)
88
Dinamica del punto materiale
~
F~ = 0 quindi L=cost
L = mvr sin θ = mvd = cost
2. Moto sotto l’azione di forze centrali
~ = cost
F~ k ~r quindi ~r × F~ = 0; L
Leggi di forza
Prima di discutere delle diverse applicazioni delle leggi di Newton, della forza gravitazionale (Fisica B) e della forza elettromagnetica (Fisica C) vediamo le diverse intensità di queste
forze. I Fisici hanno identificato quattro tipi di forze:
• Forza gravitazionale. Ha origine nella presenza stessa
della materia
Dinamica del punto materiale
89
• Forza elettromagnetica. È responsabile dei legami molecolari e della struttura dei solidi (Fisica della Materia)
• Forza nucleare debole. Causa alcuni processi radioattivi
e alcune interazioni tra le particelle
• Forza nucleare forte. Responsabile dei legami che generano i nuclei atomici (Fisica della Materia)
Se prendiamo 1 l’intensità della Forza nucleare forte, l’interazione elettromagnetica è circa 10−2 , l’intensità della Forza
debole è circa 10−7 e l’intensità della forza gravitazionale è
circa 10−38.
90
8
Lavoro ed Energia
Lavoro ed Energia
Risoluzione dell’equazione fondamentale della dinamica
Consideriamo una particella che a causa delle interazioni con
altre particelle è sottoposta a una serie di forze
Ci proponiamo di determinarne il moto ~r(t) in funzione della
forza risultante F~ (t) agente su di essa
Se conosciamo F~ (t) integrando l’equazione fondamentale della
dinamica
d~p
(8.1)
F~ (t) =
dt
otteniamo
Z p~
Z t
d~p =
F~ (t)dt
t0
p~0
definendo
Risulta
Rt
t0
F~ (t)dt Impulso I~
p~ − p~0 = I~
La variazione della quantità di moto di una particella è uguale
all’Impulso ( Teorema dell’impulso )
Una forza intensa che agisce per breve tempo può produrre la
stessa variazione di quantità di moto di una forza debole che
agisce per un tempo maggiore
Il teorema dell’impulso è applicato nei processi di urto
Tramite la p~ = m~v si ricava
I~
~v = ~v0 +
m
91
Lavoro ed Energia
Integrando la ~v =
d~r
dt
risulta
I~
~v0 + E
m
!
1
~r(t) = ~r0 + ~v0(t − t0) +
m
Z
Z
t
~r − ~r0 =
t0
dt
cioè
t
~
Idt
t0
Noto F~ (t) risolviamo l’equazione del moto
In generale nello studio della fisica si conosce la forza in
funzione delle coordinate
F~ = F~ (~r) = F~ (x, y, z)
Per risolvere l’equazione del moto si introducono due nuove
grandezze:Lavoro e Energia
Lavoro
Si abbia una particella A che si muove sotto l’azione della forza
F~
92
Lavoro ed Energia
il lavoro infinitesimo compiuto dalla forza F~ nell’intervallo di
tempo dt è definito dal prodotto scalare
dW = F~ · d~r
(8.2)
risulta
dW = F ds cos θ = FT ds
• Il lavoro è una grandezza scalare
• La sola componente della forza parallela al moto compie
lavoro
• Se una forza è perpendicolare allo spostamento il lavoro
da essa compiuto è nullo. Infatti
π
~
dW = F · d~r = F ds cos = 0
2
Per esempio non compie lavoro
Lavoro ed Energia
93
– La forza centripeta nel moto circolare
– Un facchino che porta delle valigie
– Una forza che non sposta il corpo
Quando una particella compie uno spostamento finito da un
punto A a un punto B, il lavoro totale compiuto dalla forza
F~ è la somma dei lavori infinitesimi relativi agli spostamenti
infinitesimi
W = F~1 · d~r1 + F~2 · d~r2 + F~3 · d~r3 + . . .
94
Lavoro ed Energia
Risulta quindi
Z
B
F~ (~r) · d~r
W =
A
scrivibile anche come
Z
B
W =
FT ds
A
Per calcolare il lavoro compiuto da una forza è necessario
conoscere:
1. La traiettoria seguita x(t), y(t), z(t)
2. L’espressione della forza in funzione delle coordinate (Il
campo di forza)
Il lavoro compiuto da una forza che agisce su una particella
quando essa si sposta fra due punti è in generale funzione della
traiettoria seguita
Quando in presenza di una forza costante il corpo si muove in
linea retta in direzione della forza stessa, risulta
Z B
Z B
W =
F~ · d~r = F
ds = F s
A
A
la formulazione Lavoro = f orza × spostamento
In presenza di più forze agenti su una particella si ottiene
dW = dW1+dW2+dW3+. . . = F~1·d~r1+F~2·d~r2+F~3·d~r3+. . .
essendo d~r1 = d~r2 = d~r3 = d~r si ottiene
~ · d~r
dW = (F~1 + F~2 + F~3 + . . .) · d~r = R
95
Lavoro ed Energia
La somma dei lavori compiuti da più forze agenti su una
particella è uguale al lavoro compiuto dalla loro risultante
Potenza
Lavoro compiuto nella unità di tempo
Si definisce la potenza media
Pm =
∆W
∆t
Si definisce la potenza istantanea
dW
P =
dt
Lavoro compiuto nella unità di tempo durante l’intervallo dt
Utilizzando la (8.2) si ha
d~r
~
P =F·
= F~ · ~v
dt
La potenza è uguale al prodotto scalare della forza per la
velocità
Il concetto di potenza è molto importante perché esprime il
ritmo con cui una macchina produce lavoro
Unità di misura
96
Lavoro ed Energia
Nel S.I. il lavoro è espresso come
dW = [F orza][Spostamento] = N m = [M ][L]2[T ]−2
Si definisce
1 N m = 1 J (Joule)
Nel sistema c.g.s.
dW = dine cm
Si definisce
1 dine cm = 1 erg = 10−7 J
Nel S.I. la potenza è espressa come
P~ = F~ ·~v = [F orza][V elocitá] = N m s−1 = [M ][L]2[T ]−3
Si definisce
1 N m s−1 = 1 W (W att)
Nel sistema c.g.s.
P = dine cm s−1 = 10−7 W
per ragioni storiche sono ancora utilizzate le seguenti unità di
misura:
• Cavallo Vapore (HP ) - Potenza
1 HP = 746 W
• Kilowattora (Kwh) - Lavoro
1 Kwh = (103 W )(3.6 103 s) = 3.6 106 J
97
Lavoro ed Energia
Energia Cinetica
L’energia cinetica esprime la capacità di una massa in movimento di compiere lavoro
Calcoliamo il lavoro compiuto da una forza F~ applicata ad
una particella di massa m durante lo spostamento da A a B
lungo un qualsiasi percorso
Z B
Z B
d~v (~r)
F~ (~r) · d~r = m
W =
· d~r
dt
A
A
Cambiando la variabile di integrazione da ~r a t:
Z tB Z tB
d~v (t) d~r(t)
d~v (~r(t))
· d~r(t) = m
·
dt
W =m
dt
dt
dt
t
tA
ZA tB d~v (t)
· ~v dt (8.3)
=m
dt
tA
utilizzando la relazione
d~v (t)
1 d~v (t)
d~v (t)
1 d(~v · ~v ) 1 d(v 2)
· ~v =
· ~v + ~v ·
=
=
dt
2 dt
dt
2 dt
2 dt
nella (8.3) si ottiene
Z tB
Z vB
2
1
d(v )
1
1
1
dt = m
d(v 2) = mvB2 − mvA2
W = m
2
dt
2
2
2
tA
vA
Definendo Energia cinetica di un corpo di massa m che si
muove di velocità v
1 2
p2
EK = mv =
2
2m
98
Lavoro ed Energia
si ha il Teorema della energia cinetica
Z B
1
1
W =
F~ (~r) · d~r = mvB2 − mvA2
2
2
A
(8.4)
Il lavoro compiuto dalla forza F~ sul corpo di massa m durante
lo spostamento da A a B è uguale alla variazione di energia
cinetica del corpo
Quando l’energia cinetica di una particella diminuisce, il lavoro
compiuto dalla forza risultante è negativo, cioè lo spostamento è opposto alla componente risultante delle forze lungo la
direzione del moto
In assenza di dissipazioni per attrito, l’energia cinetica di una
particella diminuisce di una quantità pari al lavoro che essa
produce
L’energia che un corpo in movimento possiede è uguale al
lavoro che essa produce nel fermarsi in assenza di attrito
Il teorema della energia cinetica non è una legge indipendente
della meccanica, ma una applicazione della seconda legge di
Newton
È interessante rilevare la similitudine tra il teorema dell’Impulso e dell’Energia cinetica
Rt
~
p~ − p~0 =
t0 F (t)dt
RB
EK − EK =
F~ (~r) · d~r
0
A
La quantità di moto e l’energia cinetica sono entrambe proprietà dinamiche della particella
99
Lavoro ed Energia
Una forza può produrre una variazione di quantità di moto
senza produrre una variazione di energia cinetica
La quantità di moto è funzione di un integrale nel tempo ed
esprime le proprietà vettoriali del moto
L’energia cinetica è una grandezza scalare calcolata tramite
un’integrale di linea ed esprime la capacità di un corpo di
compiere lavoro
Dimensionalmente l’energia cinetica è omogenea a un lavoro
1
EK = mv 2 = Kg m2 s−2 = J = [M ][L]2[T ]−2
2
Come unità di misura è molto diffuso l’elettron-volt (eV)
1 eV = 1.60210 10−19 J
Le definizioni di lavoro ed energia cinetica sono molto utili per
risolvere l’equazione del moto, in quanto in generale è nota
F~ (~r)
ESEMPIO: Un blocco di peso 52.5 Kgf scivola lungo un piano orizzontale con v = 1 ms fermandosi contro una molla di
costante elastica k = 25 N
m.
Determinare la massima compressione della molla.
v
o
P
x
100
Lavoro ed Energia
L’energia cinetica del blocco risulta:
1
1 peso 2
EK = mv 2 =
v
2
2
g
Il lavoro compiuto dalla molla, che esercita sul corpo la forza
funzione della compressione F = −k x, è
Z x
Z x
1
W =
F (x)dx = −
kxdx = − kx2
2
0
0
Nel punto di massima compressione EK = 0, quindi utilizzando il teorema dell’energia cinetica
∆EK = W
cioè
1
−
2
peso 2
1 2
v = − kx
g
2
per cui
r
x=
peso
v = 1.4 m
kg
Lavoro di una forza costante
Consideriamo una particella di massa m in moto in un campo
di forze F~ = cost, non prendendo in considerazione altre forze
presenti
101
Lavoro ed Energia
Il lavoro compiuto dalla forza F~ è
Z B
Z B
W =
F~ (~r)·d~r = F~ ·
d~r = F~ ·(~rB −~rA) = F~ ·~rB −F~ ·~rA
A
A
Il lavoro compiuto dalla forza non dipende dalla traiettoria
seguita dalla particella
Un caso notevole è la forza di gravità
F~ = −ûy mg
~rB − ~rA = ûx(xB − xA) + ûy (yB − yA)
102
Lavoro ed Energia
Si ha
Z
B
W =
F~ (~r)·d~r = F~ ·(~rB −~rA) = −mg(yB −yA) = mgyA−mgyB
A
Il lavoro compiuto dalla forza di gravità dipende soltanto dalla
differenza yB − yA e non dalla traiettoria
ESEMPIO: un corpo cade partendo da fermo da una altezza
h. Quale è la sua energia cinetica quando tocca il terreno?
L’aumento di energia cinetica è uguale al lavoro compiuto dalla
forza di gravità
Z 0
W =
F~ (~r) · d~r = mgh
h
La variazione di energia cinetica è (v0 = 0):
1
1
1
∆EK = mv 2 − mv02 = mv 2
2
2
2
Uguagliando le due espressioni
1 2
mv = mgh
2
La velocità all’impatto è
p
v = 2gh
Energia Potenziale
In presenza di una forza costante si ha
W = F~ · (~rB − ~rA)
103
Lavoro ed Energia
Una forza funzione della posizione si definisce conservativa
quando la sua dipendenza dal vettore posizione ~r è tale che
il lavoro compiuto dalla forza quando la particella si sposta
da un punto A a un punto B può essere espressa sempre come
differenza tra il valore iniziale e finale di una quantità chiamata
EP (~r)
Z
B
W =
A
F~ (~r) · d~r = EPA − EPB = −∆EP
La quantità EP (~r) è definita Energia potenziale
L’energia potenziale è una funzione delle coordinate tale che la
differenza dei valori che essa assume nella posizione iniziale e
finale è uguale al lavoro compiuto dalla forza conservativa sulla
particella per spostarla dalla posizione iniziale alla posizione
finale
Per la forza di gravità si ha
EP = mgy
Per una forza costante si ha
EP = −F~ · ~r
ESEMPIO: Consideriamo un corpo di massa m che urta con
velocità v una molla agganciata ad una parete.
La forza esercitata dalla molla è data dalla
legge di Hooke
F = −k x
104
Lavoro ed Energia
v
(1)
m
x
v=0
(2)
m
v
(3)
m
Trascurando le forze di attrito si verifica come l’energia cinetica iniziale diminuisce fino ad annullarsi nella posizione di
massima compressione. Successivamente si produce una inversione del moto e il corpo abbandona la molla con la stessa
energia cinetica iniziale e con velocità opposta.
Il corpo ha percorso, nel campo di forze conservativo dovuto
alla molla, una linea chiusa e la sua capacità di compiere lavoro rimane inalterata
In presenza di forze di attrito tra le superfici, l’energia cinetica
al distacco sarebbe inferiore, in quanto le forze di attrito non
sono conservative
Una forza è conservativa quando il lavoro che la forza compie
per spostare un corpo da una punto A ad un punto B è indipendente dalla traiettoria seguita per portare il corpo da A a
105
Lavoro ed Energia
B
Z
B
F~ (~r) · d~r =
W =
Z
B
Z
F~ (~r) · d~r =
F~ (~r) · d~r = . . .
A(3)
A(2)
A(1)
B
Introduciamo un punto P di riferimento fisso
Z
B
F~ (~r) · d~r =
W =
A
Z
P
F~ (~r) · d~r +
A
Z
B
F~ (~r) · d~r
P
Poichè l’integrale non dipende dal percorso si può scrivere
B
Z
F~ (~r) · d~r = U (B)
P
Z
P
F~ (~r)·d~r =
A
Z
A
F~ (~r)·(−d~r) = −
P
Z
A
F~ (~r)·d~r = −U (A)
P
Quindi
Z
B
W =
A
F~ (~r) · d~r = U (B) − U (A)
106
Lavoro ed Energia
Si definisce l’energia potenziale della forza conservativa la funzione
EPA = − [U (A) + K]
con K = costante
Si ottiene quindi
Z
B
W =
A
F~ (~r) · d~r = EPA − EPB
La funzione Energia potenziale
• è definita solo in presenza di forze conservative
• è definita a meno di una costante
Il livello di riferimento è definito come meglio aggrada
Negli impieghi pratici sono significative soltanto le differenze
di energia potenziale
Scegliendo un percorso chiuso A=B, si ha EPA = EPB e il
lavoro totale compiuto dalla forza conservativa è nullo
107
Lavoro ed Energia
I
W =
F~ (~r) · d~r = 0
La circuitazione della forza F~ è nulla
Se una forza ha circuitazione nulla per qualsiasi percorso ⇒ è
conservativa
I
F~ (~r) · d~r = 0 ⇔ F orza conservativa
Relazione tra forza ed energia potenziale
Si ha
Z B
Z
W =
F~ · d~r = EPA − EPB = −
A
B
dEP
A
quindi
F~ · d~r = −dEP
sviluppando
F~ · d~r = F ds cos θ = −dEP
dove ds è il modulo dello spostamento e θ l’angolo compreso
tra F~ e ~r
Risulta
−dEP
F cos θ =
(8.5)
ds
Noto EP (~r) possiamo ricavare la componente di F~ in qualsiasi
direzione
−dEP
ds è denominata derivata direzionale di EP
108
Lavoro ed Energia
Gradiente di una funzione V
Consideriamo una funzione scalare V (x, y, z)
Tracciamo le due superfici
V (x, y, z) = C1 V (x, y, z) = C2
dove C1 e C2 differiscono di una quantità infinitesima
si può scrivere
dV
C2 − C1
=
ds
ds
Variazione di V per unità di lunghezza (derivata direzionale
di V )
Indicando con dV
dn la derivata direzionale lungo la direzione
normale AN si ha
dV
dV dn dV
=
=
cos θ
ds
dn ds
dn
(8.6)
La derivata direzionale assume valore massimo per θ = 0
109
Lavoro ed Energia
Si definisce gradiente della funzione V il vettore
~ = ûn dV
gradV = ∇V
(8.7)
dn
perpendicolare alla superficie V (x, y, z) = costante
dalla (8.5), dalla (8.6) e dalla (8.7) si ottiene l’espressione della
forza come gradiente della corrispondente energia potenziale
cambiato di segno
~ P
F~ = −∇E
In forma cartesiana l’espressione della forza risulta
∂EP
∂EP
∂EP
~
F = −ûx
− ûy
− ûz
∂x
∂y
∂z
L’operatore gradiente espresso in coordinate cartesiane è
∂
∂
∂
~
∇ = ûx + ûy + ûz
∂x
∂y
∂z
Quindi le componenti di una forza conservativa possono essere
scritte come
∂EP
∂EP
∂EP
Fx = −
; Fy = −
; Fz = −
;
∂x
∂y
∂z
Applicando il teorema di Schwartz (le derivate parziali seconde
miste di una funzione continua sono uguali):
∂ 2 EP
∂x∂y
∂ 2 EP
∂x∂z
∂ 2 EP
∂y∂z
=
∂ 2 EP
∂y∂x
=
∂ 2 EP
∂z∂x
=
∂ 2 EP
∂z∂y
∂Fy ∂Fx
=
∂x
∂y
∂Fz ∂Fx
=
⇒
∂x
∂z
∂Fz ∂Fy
⇒
=
∂y
∂z
⇒
110
Lavoro ed Energia
Condizione necessaria e sufficiente perchè un campo di forze
sia conservativo
Moto piano in un campo di forze centrali
in coordinate polari F~ è espresso dalla
1 ∂EP
∂EP
F~ = F~r + F~θ = −ûr
− ûθ
∂r
r ∂θ
Quando EP dipende soltanto da |~r| e non da θ la forza è
centrale, cioè ha componente soltanto radiale e la sua retta di
azione passa sempre per un punto detto centro
Inversamente quando la forza è centrale EP dipende soltanto
da |~r|
L’energia potenziale associata a una forza centrale dipende
soltanto dalla distanza della particella dal centro della forza
EP (|~r|) ⇔ Forza centrale
111
Lavoro ed Energia
Conservazione dell’energia meccanica di una particella
In presenza di un campo di forze conservative, si ha
• W = EPA − EPB
Valida per forze conservative
• W = EKB − EKA
Valida per qualsiasi forza
Per cui
EKB − EKA = EPA − EPB
cioè
(EK + EP )B = (EK + EP )A
La somma EK +EP è definita Energia Totale della particella
1 2
E = EK + EP = mv + EP (x, y, z)
2
Essendo A e B punti generici, si ha Il Teorema di conservazione dell’Energia
E = EK + EP = cost
(8.8)
L’Energia totale di una particella sottoposta a forze conservative è costante
Una tipica forza conservativa è la Forza di attrazione gravitazionale
1 2
E = EK + EP = mv + mgh = cost
2
112
Lavoro ed Energia
ESEMPIO:Un blocco di 3Kg scivola senza attrito lungo un
piano inclinato lungo 1m . Determinare la velocità del blocco
quando abbandona il piano inclinato.
Risulta EPi = mgl sin π6 e vi = 0 quindi EKi = 0
Quando il corpo raggiunge la fine del piano inclinato risulta
EPf = 0 e EKf = 12 mvf2
Dalla (8.8) si ricava
1 2
mvf = mgh
2
quindi vf = 3.13 ms
Se si utilizzano le leggi di Newton
π
mg sin = ma
6
per cui a = 4.9 sm2
utilizzando la vf2 = vi2 + 2as si ottiene vf = 3.13 ms
Se una particella parte da ferma da una altezza h0 si può
ottenere la velocità in un punto qualsiai tramite la relazione
1
E = mv 2 + mgh = mgh0
2
da cui v 2 = 2g(h0 − h) ricavabile anche da equazione del moto
Lavoro ed Energia
113
Nella trattazione non è stato menzionato il tragitto seguito
dalla particella: per una data energia totale il modulo della
velocità in ogni punto è determinabile tramite le coordinate
del punto stesso indipendentemente dal percorso seguito per
raggiungere il punto
Il teorema della energia è stato dimostrato tramite le leggi del
moto e non aggiunge leggi fondamentali nuove
Le leggi del moto permettono la risoluzione dei problemi di dinamica senza utilizzare il teorema di conservazione dell’energia
quando
• si conosce F~ (t)
• si è in grado di risolvere l’eq. differenziale del moto
Mentre la soluzione della equazione del moto è generalmente
complicata, l’applicazione dei teoremi di conservazione dell’energia è molto più agevole
ESEMPIO: Determinare l’altezza minima da cui dovrebbe
partire una pallina, in assenza di attrito, per percorrere interamente il circuito in figura
114
Lavoro ed Energia
Nel punto più alto del cappio B risulta
mv 2
F + mg =
R
La velocità minima si ricava ponendo F = 0, cioè
p
v = gR
l’energia totale in A risulta
EA = (EK + EP )A = mgh
ed in B
1
5
EB = (EK + EP )B = m(gR) + mg(2R) = mgR
2
2
Essendo EA = EB si ottiene h = 52 R
Moto rettilineo sotto l’azione di forze conservative
Mediante l’applicazione dei principi di conservazione si ricavano in generale le quantità dinamiche principali ma non si
risolve l’equazione del moto ~r = ~r(t)
In alcuni casi semplici si ricava l’espressione completa del moto
Nel moto rettilineo sotto l’azione di forze conservative risulta
1 2
E = mv + EP (x) = cost
(8.9)
2
essendo v =
dx
dt
si ha
1
dx
E= m
2
dt
2
+ EP (x) = cost
115
Lavoro ed Energia
risolvendo rispetto a
dx
dt
si ha
r
2
dx
=
[E − EP (x)]
dt
m
il moto può avvenire soltanto nelle regioni in cui E ≥ EP
Separando le variabili x e t ed integrando
Z t
Z x
dx
q
=
dt = t
2
0
x0
m [E − EP (x)]
P
In presenza di una forza costante dalla F = − dE
dx integrando
si ottiene
EP (x) = −F x + C
Se poniamo EP = 0 per x = 0 si ha C = 0, quindi
r Z x
m
dx
√
=t
2 0
E + Fx
cioè
2p
2√
(E + F x) −
E=
F
F
risolvendo rispetto a x
r
1F 2
2E
x=
t +
t
2m
m
sostituendo
ottiene
F
m
r
2
t
m
= a e poichè E = 21 mv02 + EP0 = 12 mv02 si
1 2
x = at + v0t
2
L’espressione cinematica del moto uniformemente accelerato
116
Lavoro ed Energia
Moto in un campo di forze centrali
Dimostriamo che una forza centrale è conservativa
Calcoliamo il lavoro compiuto dalla forza per spostare il corpo
dal punto A al punto B
dr 1
B
(1)
dr
1
θ1
θ1
R
F
1
F
2
A
θ2
F
1
R+dR
(2)
dr
2
R
dR
Consideriamo due tratti di traiettoria compresi tra le due sfere
di raggio R e R + dR e determiniamo
~ R⇒R+dR
dW = (F~ · dr)
Lungo i due percorsi
~ 1 = F1dr1 cos θ1 = F dR
1. F~1 · dr
~ 2 = F2dr2 cos θ2 = F dR
2. F~2 · dr
117
Lavoro ed Energia
di conseguenza
~2
~ 1 = F~2 · dr
F~1 · dr
L’integrale non dipende dal percorso per qualsiasi percorso →
F~ è una forza conservativa
L’energia potenziale è funzione soltanto di |~r|
1 2
E = mv + EP (r) = cost
2
Il modulo di ~v dipende solo dalla distanza dal centro della
forza
Il principio di conservazione dell’energia, grandezza scalare che
non fornisce informazioni sulla direzione del moto, non è sufficiente per risolvere l’equazione del moto in un campo di forze
centrali
Per ottenere la soluzione generale del moto in un campo di
forze centrali devono essere applicati due principi di conservazione:
• Principio di conservazione dell’Energia
• Principio di conservazione del momento della quantità
~
di moto (L)
In coordinate polari la velocità è
2
2
dr
dθ
v 2 = vr2 + vθ2 =
+ r2
dt
dt
introducendo la relazione L = mr2 dθ
dt si ha
2
dr
L2
2
+
v =
dt
(mr)2
118
Lavoro ed Energia
L’equazione di conservazione dell’energia diventa
1
dr
E= m
2
dt
2
L2
+
+ EP (r)
2mr2
Espressione analoga alla (8.9) relativa al moto rettilineo supponendo che nel moto radiale la particella si muova sotto
l’azione di una energia potenziale efficace
L2
EPef f (r) = EP (r) +
= EP (r) + EPc (r)
2mr2
Il termine EPc (r) è definito Energia potenziale centrifuga, in
quanto la forza associata sarebbe diretta verso l’esterno
dEc
L2
∂Ec
=−
=
Fc = −
∂r
dr
mr3
L’EPc (r) semplifica la trattazione
Sulla particella non agisce nessuna forza centrifuga non associata al potenziale EP (r)
La soluzione del moto radiale r = r(t) diventa analoga al caso
rettilineo
Z x
dx
q
=t
2
x0
m [E − EPef f (r)]
La parte angolare del moto è ottenuta dall’espressione del
momento della quantità di moto L = mr2 dθ
dt :
dθ =
L
dt
2
mr (t)
119
Lavoro ed Energia
Integrando
Z
t
θ = θ0 +
0
L
dt
2
mr (t)
Discussione sulle curve della energia potenziale
Nei problemi monodimensionali e in presenza di un campo di
forze centrali, la rappresentazione grafica di EP (x) o di EP (r)
è utile per comprendere le caratteristiche generali del moto
In ogni posizione x la forza che agisce sulla particella risulta
F =−
dEP
dx
F ha verso opposto rispetto alla pendenza della curva EP (x),cioè:
• è diretta verso sinistra quando EP aumenta
120
Lavoro ed Energia
• è diretta verso destra quando EP diminuisce
Si ha
• EP (x) minimo ⇒ punto di equilibrio stabile
• EP (x) massimo ⇒ punto di equilibrio instabile
Consideriamo un campo di forze centrali attrattivo per qualsiasi distanza
In presenza di una energia totale E = Ed come in (1) si ha un
moto del tipo
Lavoro ed Energia
121
In presenza di una energia totale come in (2) si ha un moto
del tipo
L’andamento della forza efficace è
122
Lavoro ed Energia
ESEMPIO: Calcolare la velocità di fuga dalla terra e dal sistema solare
Una particella di massa m e velocità v ha nel campo gravitazionale terrestre energia totale
1 2 GMT m
E = mv −
2
RT
dove G = costante di gravitazione universale = 6.67 10−8
5.98 1027 g, RT = 6.4 108 cm
EP (J)
dine cm2
,MT
g2
ET=0
0
EK,i
-2
EK
-4
-6
-8
RT
-10
0
1 104
2 104
3 104
4 104
5 104
6 104
7 104
r (Km)
Dopo il lancio l’energia si mantiene costante e deve essere
uguale a zero,cioè:
GMT m
1 2
mv =
2 F
RT
risulta
r
2GMT
6 cm
vF =
= 10
RT
s
=
Lavoro ed Energia
123
Nel caso del sole (RS = 1.5 1013 cm), si ha
r
2GMS
6 cm
vS =
= 4 10
RS
s
Forze non conservative
L’attrito radente e l’attrito nei fluidi sono esempi di forze non
conservative
Essi si oppongono sempre al moto per cui il lavoro compiuto
lungo un percorso chiuso è diverso da zero
Una particella può in generale essere sottoposta a forze conservative e non conservative contemporaneamente
Il lavoro totale compiuto sulla particella quando si sposta da
A a B, risulta
W = EKB − EKA = EPA − EPB + W 0
dove W 0 è il lavoro compiuto dalle forze non conservative
Si ha quindi
(EK + EP )B − (EK + EP )A = W 0
In generale W 0 è negativo quindi (EK + EP ) diminuisce passando da A a B
Il principio di conservazione della energia è valido in presenza
di sole forze conservative
Nel caso di attriti l’energia perduta si è trasformata in calore:
l’energia termica sviluppata è esattamente uguale all’energia
meccanica dissipata
124
Lavoro ed Energia
Il lavoro prodotto dalla forza di attrito è uguale e contrario
all’aumento dell’energia termica Q
W 0 = −Q
Si può quindi scrivere
(EK + EP )B = (EK + EP )A + W 0
(8.10)
Principio di conservazione dell’energia dell’universo
L’energia si trasforma da una forma all’altra ma non può essere
nè creata nè distrutta
ESEMPIO:Un blocco di 3Kg scivola soggetto a una forza di
attrito fs = 5 N lungo un piano inclinato lungo l = 1m.
Determinare la velocità del blocco quando abbandona il piano
inclinato.
Risulta EPi = mgl sin π6 e vi = 0 quindi EKi = 0
Quando il corpo raggiunge la fine del piano inclinato risulta
EPf = 0 e EKf = 12 mvf2
La forza di attrito compie il lavoro
WS = −fsl = −5 J
125
Lavoro ed Energia
Applicando la (8.10)
1 2
mv = EPi + WS = 9.7 J
2 f
quindi vf = 2.54 ms
ESEMPIO: Un corpo inizialmente in quiete cade attraverso
un fluido viscoso da una altezza y0. Determinare la rapidità
con cui vengono dissipate la sua energia cinetica e potenziale
gravitazionale
Si ha
1
2
d(EK + EP ) d 2 mv + mgy
=
dt
dt
inoltre
d(EK + EP ) = dW 0
per cui
d(EK + EP ) dW 0
=
= F 0v
dt
dt
nel caso dei fluidi F 0 = −Kηv, quindi
d(EK + EP )
= −Kηv 2
dt
(8.11)
L’energia cinetica e potenziale sono trasformate in energia
termica
Quando viene raggiunta la velocità limite, l’EK diventa costante ed è la sola energia potenziale a essere trasformata in
energia termica
d(EK + EP )ss d(EP )ss
dy
=
= mg = mgv
dt
dt
dt
(8.12)
126
Lavoro ed Energia
Dalla (8.11) e (8.12) ricaviamo l’espressione già trovata della
velocità limite
mg
vl = −
kη
127
Dinamica dei sistemi
9
Dinamica di un sistema di particelle
Consideriamo un sistema di particelle
• Moto del centro di massa
• Conservazione della quantità di moto
• Conservazione della quantità di moto angolare
• Conservazione dell’Energia
Il moto di un sistema di particelle può essere separato in
1. Moto del centro di massa (CM)
• tutta la massa concentrata nel CM
• Risultante delle Forze esterne applicata in CM
2. Moto delle singole particelle del sistema intorno al CM
Moto del centro di massa
Se abbiamo un sistema costituito da n masse m1 + m2 + . . . +
mn dotate di velocità v1 + v2 + . . . + vn, la quantità di moto
totale è
P=
n
X
i=1
pi =
n
X
i=1
mivi = m1v1 + m2v2 + . . .
128
Dinamica dei sistemi
La massa totale è:
M=
n
X
mi
i=1
Consideriamo il sistema equivalente ad un’unica particella di
massa M e di velocità vCM
P = M vCM
Risulta
vCM
Pn
pi
P
= Pni=1
=
M
i=1 mi
vCM è la velocità di un punto denominato centro di massa
Le coordinate del centro di massa sono determinate da
Pn
miri
m1r1 + m2r2 + . . . + mnrn
i=1
= Pn
(9.1)
rCM =
m1 + m2 + . . . + mn
i=1 mi
Infatti derivando la (9.1) si ottiene
Pn
n
X
drCM
1
dri
mivi
=
mi
= i=1
= vCM
dt
M i=1
dt
M
Leggi del moto di un sistema di particelle
Prima legge del moto
Se il sistema è isolato per il principio di conservazione della
quantità di moto P è costante,quindi
Il centro di massa di un sistema isolato si muove con velocità
costante vCM in qualsiasi sistema inerziale
129
Dinamica dei sistemi
Si definisce sistema di riferimento del centro di massa o sistema
C, il sistema di riferimento in cui
vCM = 0
quindi nel sistema C si ha P = 0 la quantità di moto totale è
nulla
Nel sistema C la descrizione del moto è in generale più semplice
Il CM è un punto ”inventato” dotato di notevoli proprietà
fisiche
Seconda legge del moto
Consideriamo un sistema S non isolato che interagisce con il
sistema S 0
Supponiamo che i due sistemi siano isolati dal resto del mondo
Per il principio di conservazione della quantità di moto si ha
X
X
P=
pi +
pj = costante
i
j
cioè
P = PS + PS 0 = costante
(9.2)
130
Dinamica dei sistemi
Quindi
∆PS = −∆PS 0
(9.3)
Si produce uno scambio di quantità di moto fra i due sistemi
Derivando rispetto al tempo la (9.2) si ha
dPS
dPS 0
=−
dt
dt
Definiamo il primo termine forza esterna esercitata su S
P
dPS d ( i pi)
Fext =
=
dt
dt
Fext non contiene le forze interne ad S perchè per il principio di
conservazione della quantità di moto non producono variazioni
di P
Poichè vCM = PMS si ha
Fext = M
dvCM
= M aCM
dt
Il centro di massa di un sistema di particelle si muove come se
fosse una particella avente massa uguale alla massa totale del
sistema e soggetta alla forza esterna applicata al sistema
Terza legge del moto per un sistema di particelle
Dalla (9.3), definendo F0ext la forza di interazione del sistema
S sul sistema S 0, si ha:
Fext = −F0ext
La legge di azione reazione tra i sistemi S e S 0
131
Dinamica dei sistemi
L’interazione tra i due sistemi di particelle si può descrivere
allo stesso modo dell’interazione fra due particelle singole
Non ricaviamo la descrizione dettagliata del moto delle singole
particelle ma la dinamica del CM
Forze agenti sulle singole particelle del sistema
Supponiamo che il sistema sia composto da due particelle:
• F12 forza interna agente sulla particella m1 dovuta alla
interazione con la particella m2
• F21 forza interna agente sulla particella m2 dovuta alla
interazione con la particella m1
• F1 forza esterna agente sulla particella m1
• F2 forza esterna agente sulla particella m2
per la legge di azione reazione
F12 = −F21
(9.4)
132
Dinamica dei sistemi
Le equazioni del moto per le due particelle sono
dp1
dt
dp2
dt
= F1 + F12
= F2 + F21
Sommando le due equazioni
dP d(p1 + p2)
=
= F1 + F2
dt
dt
Si può generalizzare per un sistema arbitrario di n particelle
Pn
n
dP d ( i=1 pi) X
Fi = Fext
=
=
dt
dt
i=1
dove Fi è la forza esterna agente sulla particella mi
La forza esterna agente su un sistema di particelle è la somma
delle forze esterne agenti su ciascuna delle particelle componenti
Anche in presenza di un sistema complesso ai fini del moto
del sistema sono efficaci solo le forze esterne applicate alle
particelle
Le interazioni interne si compensano reciprocamente senza
provocare variazioni della quantità di moto del sistema
Esempio:
133
Dinamica dei sistemi
Massa ridotta
Consideriamo due particelle soggette soltanto alla loro mutua
interazione
Le equazioni del moto delle due particelle per un osservatore
inerziale sono
dv2
dv1
; F21 = m2
F12 = m1
dt
dt
cioè
dv1 F12
dv2 F21
=
;
=
dt
m1
dt
m2
Sottraendo membro a membro
dv1 dv2 F12 F21
−
=
−
dt
dt
m1
m2
Utilizzando la (9.4) si ha
d(v1 − v2)
=
dt
1
1
+
F12
m1 m2
Poichè v1 − v2 = v12 velocità di m1 relativa a m2, si ha
d(v1 − v2) dv12
=
= a12
dt
dt
134
Dinamica dei sistemi
dove a12 è l’accelerazione di m1 relativa a m2 Quindi
1
1
a12 =
+
F12
m1 m2
Definiamo massa ridotta µ del sistema
1
1
1
µ = m1 + m2
m1m2
µ=
m1 + m2
Risulta
F12 = µa12
Il moto relativo di due particelle soggette soltanto alla loro mutua interazione è equivalente al moto, relativo ad un osservatore inerziale, di una particella avente massa uguale alla massa
ridotta e soggetta a una forza uguale alla loro interazione
Si può, utilizzando i concetti di moto relativo e massa ridotta,
separare lo studio di un sistema di due particelle interagenti
in:
• Moto del centro di massa del sistema, che in assenza di
forze esterne è rettilineo
• Moto di una particella di massa µ sottoposta alla forza
di interazione interna
Quando m1 m2 si ha µ ≈ m1 ed il CM coincide con la
massa m2
ESEMPIO: Siano date m1 e m2 con velocità v1 e v2
Determinare vCM , v10 e v20 (velocità delle particelle rispetto al
CM )
135
Dinamica dei sistemi
m1v1 + m2v2
vCM =
m1 + m2
Utilizzando la trasformazione galileiana
2
v12
v10 = v1 − vCM = m1m+m
2
1
v20 = v2 − vCM = − m1m+m
v12
2
(9.5)
(9.6)
dove v12 è la velocità relativa delle due particelle Le quantità
di moto di m1 e m2 rispetto al CM sono
m2
p01 = m1v10 = mm11+m
v12 = µv12
2
m1
p02 = m2v20 = mm12+m
v21 = −µv12
2
La quantità di moto totale del sistema rispetto al CM è nulla
P0 = p01 + p02 = 0
Momento angolare di un sistema
Per una particella il momento della quantità di moto (momento angolare) risulta
L=r×p
136
Dinamica dei sistemi
La legge angolare del moto
dL
=r×F=τ
dt
Consideriamo un sistema formato da due particelle
dL1
dt
dL1
dt
= τ1 ;
= r1 × (F1 + F12) ;
dL2
= τ2
dt
dL2
= r2 × (F2 + F21)
dt
Sommando le due equazioni si ottiene la legge angolare del
moto del sistema
dL1 dL2
+
= τ 1 +τ 2 = r1 ×F1 +r2 ×F2 +(r1 −r2)×F12 (9.7)
dt
dt
Essendo per la terza legge del moto
(r1 − r2) × F12 = 0
la (9.7) risulta
dL1 dL2
+
= τ ext
dt
dt
137
Dinamica dei sistemi
Per un sistema formato da un numero qualsiasi di particelle
dL
= τ ext
dt
dove
L=
X
Li ;
τ ext =
i
X
τ exti
i
Infatti i momenti τ interni si annullano per la terza legge del
moto (forze interne che agiscono lungo le rette congiungenti
ciascuna coppia di particelle)
La derivata rispetto al tempo del momento angolare totale
di un sistema di particelle rispetto ad un punto arbitrario
è uguale al momento totale rispetto allo stesso punto delle
forze esterne agenti sul sistema
Riassumendo le variazioni della quantità di moto lineare e angolare sono prodotte dalle sole forze esterne in quanto gli effetti
delle forze interne si compensano
dp
= Fext
dt
dL
= τ ext
dt
(9.8)
(9.9)
Si può studiare il moto complessivo di un sistema trascurando
le forze interne
In assenza di forze esterne o quando la somma dei loro momenti
è nulla, si ha
dL
=0
dt
138
Dinamica dei sistemi
quindi
L1 + L2 + L3 + . . . = costante
legge di conservazione della quantità di moto angolare
Il momento angolare totale L di un sistema isolato o per il
quale è nullo il momento delle forze esterne, è costante (in
modulo, direzione e verso)
Esempi:
• gli elettroni di un atomo rispetto al nucleo (Sistema
isolato)
• I pianeti del sistema solare rispetto al Sole (Sistema
isolato)
I principi di conservazione della quantità di moto e della quantità di moto angolare sono validi anche in fisica atomica e
nucleare, dove non sono valide le leggi della meccanica Newtoniana
In presenza di due sistemi interagenti S e S 0 isolati dal resto
del mondo, il momento angolare totale è costante
L = LS + LS 0 = costante
Per effetto dell’interazione i due sistemi interagenti si scambiano quantità di moto angolare
∆LS = −∆LS 0
139
Dinamica dei sistemi
Momento angolare nei sistemi di riferimento C e L
La posizione del CM nel sistema L è
rCM
m1r1 + m2r2
=
m1 + m2
Le posizioni delle particelle nel sistema C sono
r01 = r1 − rCM =
r02 = r2 − rCM =
m2 (r1 −r2 )
m2 r12
=
m1 +m2
m1 +m2
m1 (r2 −r1
m1 r12
=
−
m1 +m2
m1 +m2
(9.10)
(9.11)
Il momento angolare del sistema rispetto al CM dalle (9.5),(9.6),
(9.10) e (9.11) risulta
m2r12
LC = r01 × p01 + r02 × p02 =
× (µv12)+
m1+ m2
m1r12
+ −
× (−µv12)
m1 + m2
ovvero
LC = r12 × µv12
(9.12)
140
Dinamica dei sistemi
Il momento angolare del sistema rispetto al CM è equivalente
a quello di una particella di quantità di moto µv12 e di posizione r12
LC è una proprietà intrinseca del sistema stesso, indipendente
dall’osservatore
LC è definito momento angolare interno
Nel caso delle particelle elementari o dei corpi rigidi il momento
angolare interno viene chiamato spin
Relazione fra il momento angolare L di un sistema calcolato rispetto ai sistemi di riferimento L e C (L,LC )
Consideriamo per semplicità un sistema composto da due sole
particelle
Il momento angolare rispetto a L è
L = r1 × p1 + r2 × p2
Le relazioni fra i vettori posizione, velocità e quantità di moto
nei due riferimenti sono
r1 = r01 + rCM ;
v1 = v10 + vCM ;
p1 = p01 + m1vCM ;
r2 = r02 + rCM
v2 = v20 + vCM
p2 = p02 + m2vCM
Il momento angolare nel sistema L risulta
L = (r01+rCM )×(p01+m1vCM )+(r02+rCM )×(p02+m2vCM ) =
= r01 × p01 + r02 × p02 + (m1r01 + m2r02) × vCM +
+ rCM × (p01 + p02) + rCM × (m1vCM + m2vCM ) =
= r01 ×p01 +r02 ×p02 +rCM ×(p01 +p02)+(m1r1 +m2r2)×vCM
Dinamica dei sistemi
141
Essendo
p01 + p02 = 0
LC = r01 × p01 + r02 × p02
2 r2
rCM = m1mr11+m
+m2
Risulta
L = LC + (m1 + m2)rCM × vCM
Ovvero
L = LC + rCM × P
(9.13)
Il momento angolare nel sistema di riferimento L può essere
scomposto in
• LC : momento angolare interno del sistema dovuto alla
rotazione intorno al CM
• rCM × P: momento angolare esterno dovuto alla traslazione del sistema
In generale nello studio dei moti rotatori dei sistemi di particelle si possono separare i moti interni rispetto al CM dal
moto del centro di massa
Relazione fra il momento meccanico esterno τ ext rispetto
al CM e il momento angolare interno LC di un sistema
Consideriamo per semplicità un sistema composto da due sole
particelle
Il momento meccanico agente sulle due particelle rispetto all’origine del sistema L risulta:
τext = r1 ×F1 +r2 ×F2 = (r01 +rCM )×F1 +(r02 +rCM )×F2 =
= r01 × F1 + r02 × F2 + rCM × (F1 + F2) (9.14)
142
Dinamica dei sistemi
Poichè il momento delle forze esterne rispetto al CM è
τ CM = r01 × F1 + r02 × F2
(9.15)
e la risultante delle forze esterne
Fext = F1 + F2
(9.16)
Introducendo la (9.16) e la (9.15) nella (9.14), si ottiene
τ ext = τ CM + rCM × Fext
(9.17)
Derivando l’espressione del momento angolare (9.13) si ottiene
dL dLC
dP drCM
=
+ rCM ×
+
×P
dt
dt
dt
dt
Poiché
drCM
× P = vCM × M vCM = 0
dt
si ottiene
dL dLC
=
+ rCM × Fext
dt
dt
(9.18)
Ricordando che
dL
= τ ext
dt
Si ha dalla (9.17) e dalla (9.18)
dLC
= τ CM
dt
(9.19)
(9.20)
La relazione (9.19) è valida per momenti angolari e meccanici
calcolati rispetto ad un punto fisso in un sistema inerziale
Dinamica dei sistemi
143
La relazione (9.20) è valida per momenti angolari e meccanici
calcolati rispetto al CM anche se non è in quiete rispetto ad
un sistema di riferimento inerziale
La relazione (9.20) rimane valida per un sistema composto da
un numero qualunque di particelle e risulta particolarmente
utile nello studio dei corpi rigidi
Energia Cinetica di un sistema
Consideriamo un sistema composto da due particelle sottoposte a forze sia esterne che interne:
All’istante considerato l’energia cinetica del sistema risulta
1
1
EK = m1v12 + m2v22
2
2
Il teorema dell’energia cinetica diventa
EK − EK0 = Wext + Wint
(9.21)
La variazione di energia cinetica di un sistema di particelle è
uguale alla somma del lavoro compiuto sul sistema dalle forze
esterne e dalle forze interne
144
Dinamica dei sistemi
Si ha
Z
B
(F1 · dr1 + F2 · dr2)
Wext =
A
e il lavoro delle forze interne
Z B
(F12 · dr1 + F21 · dr2)
Wint =
A
poiché F12 = −F21 si ha
Z B
Z
(F12 · dr1 − F12 · dr2) =
Wint =
A
B
F12 · d(r1 − r2)
A
Scrivendo r1 − r2 = r12 si ottiene
Z B
Wint =
F12 · dr12
A
Il lavoro compiuto dalle forze interne dipende soltanto dallo
spostamento reciproco delle particelle
Il risultato è valido per sistemi composti da un numero qualsiasi di particelle
Conservazione dell’energia di un sistema
di particelle
Consideriamo un sistema di due particelle in presenza di un
campo di forze interne conservative. Si può scrivere
Z B
Wint =
F12 · dr12 = EP,intA − EP,intB
A
145
Dinamica dei sistemi
Se le forze interne agiscono lungo la congiungente le particelle,
l’energia potenziale dipende soltanto da r12
L’energia potenziale non dipende dal sistema di riferimento
ma dalle coordinate relative delle particelle
Per il teorema della energia cinetica otteniamo
EKB − EKA = Wext + Wint = Wext + EP,intA − EP,intB
cioè
(EK + EP,int)B − (EK + EP,int)A = Wext
La somma della energia cinetica e della energia potenziale
interna di un sistema rispetto ad un sistema di riferimento
inerziale, viene definita energia propria U
1
1
U = EK + EP,int = m1v12 + m2v22 + EP,int
2
2
In presenza di più particelle si ha
U = EK + EP,int =
X1
i
2
mivi2
+
X
EP,int
j
Dove la prima sommatoria è estesa alle i particelle e la seconda alle j coppie di particelle
In assenza di forze interne l’energia interna ha soltanto la
componente cinetica
Dalla definizione di energia propria ricaviamo
UB − UA = Wext
146
Dinamica dei sistemi
La variazione di energia propria di un sistema di particelle
uguaglia il lavoro compiuto dalle forze esterne sul sistema
Per un sistema isolato Wext = 0 quindi in presenza di forze
interne conservative l’energia propria di un sistema isolato è
costante (principio di conservazione dell’energia propria per
un sistema di particelle)
Se due sistemi S e S 0, dotati di forze interne conservative,
interagiscono fra loro e sono isolati dal resto dell’universo, si
ha
US + US 0 = cost
L’interazione vista come scambio di energia è
∆US = −∆US 0
In presenza di forze esterne conservative si può scrivere
Wext = EP,extA − EP,extB
Si ha allora
UB − UA = EP,extA − EP,extB
cioè
(U + EP,ext)A = (U + EP,ext)B
Si definisce Energia totale del sistema E
E = U + EP,ext = EK + EP,int + EP,ext = cost
(9.22)
L’energia totale del sistema è costante in presenza di forze
interne ed esterne conservative
Dinamica dei sistemi
147
La relazione (9.22) costituisce il principio di conservazione
della energia totale per un sistema di particelle
ESEMPIO: Si abbiano due corpi di massa m1 e m2 uniti da
una molla di costante elastica k. Se il sistema è posto su un
piano orizzontale in assenza di attriti, si ha
1
1
1
U = EK + EP,int = m1v12 + m2v22 + kx2 = cost
2
2
2
Se il sistema viene lanciato in aria, definite y1 e y2 le altezze
dei due corpi, risulta
E = EK + EP,int + EP,ext =
1
1
1 2
2
2
= m1v1 + m2v2 + kx + m1gy1 + m2gy2 = cost
2
2
2
Energia interna di un sistema
Poiché l’energia cinetica dipende dalle velocità delle particelle, i valori che assume dipendono dal sistema di riferimento
utilizzato per descrivere il moto delle particelle
L’energia cinetica calcolata da un sistema di riferimento solidale con C viene definita energia cinetica interna EK,int del
sistema
Si definisce energia interna di un sistema la somma
Uint = EK,int + EP,int
Quando EP,int è trascurabile (gas ad elevata temperatura) la
conservazione della energia si riduce alla conservazione dell’energia cinetica. Si definisce energia termica l’energia associata
al moto delle molecole
148
Dinamica dei sistemi
Relazione tra l’energia cinetica nei sistemi
C eL
Consideriamo un sistema costituito da due particelle
L’energia cinetica nel sistema di riferimento L risulta
1
1
EK = m1v12 + m2v22
2
2
Le relazioni tra le velocità misurate nei due sistemi
v1 = v10 + vCM ;
v2 = v20 + vCM
Sostituendo otteniamo
1
1
0
2
EK = m1(v1 + vCM ) + m2(v20 + vCM )2 =
2
2
1
1
1
0
0
2
= m1v12 + m2v22 + (m1 +m2)vCM
+(m1v10 +m2v20 )·vCM
2
2
2
L’espressione
m1v10 + m2v20 = PCM = 0
Risulta quindi
1
2
EK = EK,int + (m1 + m2)vCM
2
cioè
1
2
EK = EK,int + M vCM
2
dove
• EK,int = 12 m1v1‘2 + 12 m2v2‘2 è l’energia cinetica interna
Dinamica dei sistemi
149
2
• 12 M vCM
è l’energia cinetica traslazionale
Il moto del sistema può essere visto come:
• moto traslazionale del CM
• moto interno relativo al CM
La relazione determinata è valida per un sistema composto da
un numero qualsiasi di particelle
Riassunto delle relazioni valide per i sistemi di particelle
P =M vCM
PC =0
L =LC + rCM × P
τ ext =τ extC + rCM × Fext
1
2
EK =EKC + M vCM
2
dP
=Fext ; M aCM = Fext
dt
dL
=τ ext ;
dt
dLC
=τ extCM
dt
EK − EK0 =Wext + Wint
∆U =Wext
150
Dinamica dei sistemi
Definizioni di Energia
Energia propria: U = EK + EP,int
Energia interna: Uint = EK,int + EP,int
Energia totale: E = EK + EP,int + EP,ext
Per il moto di un sistema di particelle valgono relazioni analoghe a quelle valide per il moto delle singole particelle:
•
dP
dt
•
dL
dt
= Fext legge per il moto traslatorio
= τ ext legge per il moto rotatorio rispetto ad un
punto fisso in un sistema di riferimento inerziale
Le equazioni scritte non forniscono una informazione completa
sul comportamento delle singole particelle (i gradi di libertà
sono 3N ), ma sull’effetto complessivo di traslazione e rotazione
del sistema
Il moto del sistema può essere visto come:
• moto traslazionale del CM
• moto interno relativo al CM
151
Urti
10
Urti
Nella collisione tra due particelle una forza relativamente grande agisce su ciascuna di esse per un tempo relativamente breve. Secondo l’idea principale che sta alla base del concetto di
”urto”, il moto delle particelle collidenti (o di almeno una di
esse) cambia piuttosto rapidamente e si può fare una separazione piuttosto netta nella scala dei tempi fra ciò che avviene
”prima dell’urto” e ”dopo l’urto”.
Le forze che agiscono per un tempo molto breve rispetto al
tempo di osservazione del sistema sono chiamate forze impulsive.
Le due particelle possono non ”toccarsi”, ma parliamo ugualmente di ”urto” poiché una forza relativamente grande, agente per un tempo breve rispetto a quello di osservazione della
particella alfa, ha l’effetto di cambiare sostanzialmente il suo
moto.
Possiamo anche parlare di ”urto” tra due galassie, se siamo
preparati a osservarle su una scala dei tempi dell’ordine dei
milioni o dei bilioni di anni
152
Urti
Impulso e quantità di moto
Una forza impulsiva F (t) varia col tempo in modo arbitrario durante un urto che avviene nell’intervallo di tempo da ti
a tf . L’area sotto la curva F (t) rappresenta l’impulso J, il
rettangolo limitato dalla forza media F̄ ha area uguale alla
precedente.
Supponiamo che la curva rappresenti l’andamento in funzione
del tempo dell’intensità (modulo) della forza agente su uno dei
due corpi durante un urto.
dp = Fdt
Z pf
Z tf
dp =
Fdt
pi
(10.1)
(10.2)
ti
Z
J=
tf
Fdt
ti
(10.3)
153
Urti
J = pf − pi
(10.4)
teorema dell’impulso-quantità di moto:
L’impulso della forza risultante agente su una particella
durante un certo intervallo di tempo è uguale alla variazione della quantità di moto della particella nello stesso
intervallo di tempo
Il lavoro implica un integrale sulla posizione della forza risultante, mentre l’impulso implica l’integrale sul tempo della
stessa forza
Il modulo dell’impulso di questa forza e uguale all’area sottesa
dalla curva F (t).
J = F̄ ∆t
(10.5)
Conservazione della quantità di moto nei
processi di urto
Consideriamo ora un urto tra due particelle, come per esempio quelle di massa m1 e m2. In ogni istante siano F12 la
154
Urti
forza esercitata sulla particella 1 dalla particella 2 e F21 quella
esercitata sulla particella 2 dalla particella 1.
Z
tf
∆p1 =
F12dt = F̄12∆t
(10.6)
ti
Analogamente per la particella 2
Z
∆p2 =
tf
F21dt = F̄21∆t
(10.7)
ti
Abbiamo visto che in ogni istante è F12 = −F21, quindi anche
F̄12 = −F̄21, e di conseguenza
∆p1 = −∆p2
(10.8)
P = p1 + p2
(10.9)
∆P = ∆p1 + ∆p2 = 0
(10.10)
Quindi, se non agiscono forze esterne, la quantità di moto
totale del sistema delle due particelle non viene modificata
dall’urto.
Urti
155
La forza impulsiva Fimp che agisce durante un urto è generalmente molto più intensa di ogni forza esterna Fext (in questo
caso costante) che può agire sul sistema.
La variazione di quantità di moto di una particella dovuta
alle forze esterne agenti durante l’urto è trascurabile rispetto
a quella dovuta alle forze esterne impulsive
156
Urti
Esempio
(a) Le quantità di moto iniziale e finale della palla da baseball.
(b) La differenza pf − pi è uguale all’impulso J.
J = pf − pi = pf + (−pi)
(10.11)
Dalla relazione J = F̄∆t, si ha F̄ = J/∆t.
|F̄| = (12.3Kg · m/s)/0.0015s = 8200N
(10.12)
Urti in una dimensione
In questo paragrafo studieremo l’effetto di un urto fra due
corpi. Noti i moti dei due corpi prima dell’urto, si potrebbero
sempre calcolare i loro moti dopo l’urto se si conoscessero le
forze che agiscono durante l’urto e si sapessero risolvere le
equazioni del moto.
Urti
157
È necessario servirsi della legge di conservazione della quantità
di moto che è applicabile in ogni urto in cui agiscono solo forze
interne, anche se non sono note
Poiché durante l‘urto anche l’energia totale si deve conservare,
l’energia totale iniziale dei corpi prima dell’urto deve essere
uguale all’energia totale finale dei prodotti della collisione
In un particolare tipo di urto, chiamato urto elastico, tutte le
forme di energia, diverse da quella meccanica U +K, si devono
ignorare
In un urto elastico l’energia cinetica iniziale del sistema
Ki è uguale all’energia cinetica finale Kf
In un altro tipo di urto, chiamato urto anelastico, l’energia
appare anche in altre forme e le energie cinetiche iniziale e
finale del sistema non sono uguali
In un urto anelastico l’energia meccanica U + K non è conservata, ma l’energia totale lo è sempre
Tutti gli urti tra oggetti reali sono anelastici. Possiamo però
trattare alcuni urti come approssimativamente elastici, per
esempio, quando gli oggetti sono rigidi come le palle da biliardo
Quando i due corpi dopo l’urto rimangono attaccati, l’urto è
detto completamente anelastico
Urti elastici
Consideriamo un urto elastico unidimensionale
158
Urti
Due particelle prima e dopo un urto elastico. Si noti che le
velocità relative prima e dopo l’urto sono uguali
Siano m1 e m2 le masse dei due corpi, v1i e v2i le componenti delle loro velocità prima dell’urto e v1f e v2f dopo l’urto.
Applicando la conservazione della quantità di moto
m1v1i + m2v2i = m1v1f + m2v2f
(10.13)
Applicando la conservazione dell’energia che, nel caso di urto
elastico coincide (per definizione) con la conservazione dell’energia cinetica Ki = Kf , si ottiene
1
1
1
1
2
2
2
2
m1v1i + m2v2i = m1v1f + m2v2f
2
2
2
2
(10.14)
la (10.13) e (10.14) possono essere scritte
m1(v1i − v1f ) = m2(v2f − v2i)
(10.15)
2
2
2
2
m1(v1i
− v1f
) = m2(v2f
− v2i
)
(10.16)
v1i + v1f = v2i + v2f
(10.17)
v1i − v2i = −(v1f − v2f )
(10.18)
159
Urti
si ottiene
m1 − m2
2m2
v1i +
v2i
(10.19)
m1 + m2
m1 + m2
Analogamente, eliminando v1f e risolvendo rispetto a v2f
v1f =
v2f
2m1
m2 − m1
=
v1i +
v2i
m1 + m2
m1 + m2
(10.20)
Consideriamo alcuni casi particolari interessanti:
• Masse uguali
v1f = v2i
v2f = v1i
(10.21)
• Particella bersaglio in quiete
In questo caso v2i = 0
2m1
m1 − m2
v1i v2f =
v1i
(10.22)
v1f =
m1 + m2
m1 + m2
Combinando questo caso con il precedente m1 = m2 si
ottiene v1f = 0 e v2f = v1i
• Bersaglio di grande massa
v1f ≈ −v1i + 2v2i
v2f ≈ v2i
(10.23)
Se la particella di massa elevata m2 si muove molto
lentamente o è in quiete
v1f ≈ −v1i
v2f ≈ 0
(10.24)
• Proiettile di grande massa Se m1 m2 le (10.19) e
(10.20) diventano
v1f ≈ v1i
v2f ≈ 2v1i − v2i
(10.25)
160
Urti
Urti anelastici
Consideriamo ora gli urti anelastici, nei quali per definizione
l’energia cinetica non è conservata. Nel solo caso particolare
di un urto completamente anelastico è possibile determinare
il moto finale conoscendo solo le condizioni iniziali. In questo
caso, i corpi dopo l’urto restano attaccati e si muovono con la
stessa velocità vf . Si ottiene
m1
m2
vf =
v1i +
v2i
m1 + m2
m1 + m2
(10.26)
Se m2 è inizialmente in quiete, questa si riduce a
vf =
Il pendolo balistico
m1
v1i
m1 + m2
(10.27)
161
Urti
Il pendolo balistico viene usato per misurare la velocità di un
proiettile
possiamo applicare la conservazione della quantità di moto
nella direzione orizzontale
mv = (M + m)V
(10.28)
dove v è la velocità del proiettile prima dell’urto e V quella
del sistema immediatamente dopo l’urto. Anche se nell’urto
l’energia meccanica non è conservata, essa si conserva durante
l’oscillazione del pendolo dopo l’urto
1
(M + m)V 2 = (M + m)gh
2
(10.29)
Eliminando V
M + mp
v=
2gh
m
L’energia cinetica del proiettile è
1 2
Kb = mv = 1900J
2
(10.30)
(10.31)
L’energia meccanica del pendolo è uguale alla sua energia
potenziale nel punto più alto dell’oscillazione
E = (M + m)gh = 3.3J
(10.32)
Sistema di riferimento del centro di massa
Quando vengono eseguiti esperimenti d’urto, le misure sono
naturalmente effettuate in un sistema di riferimento solidale
162
Urti
con il laboratorio (sistema del laboratorio). Indipendentemente dalle modalità dell’esperimento, l’urto viene osservato
da un sistema di riferimento solidale con il centro di massa
delle particelle collidenti (sistema del centro di massa), l’analisi del fenomeno è spesso più semplice e il significato fisico
più chiaro.
Una serie di ”istantanee” dell’urto unidimensionale elastico tra
due particelle di masse m1 e m2 = 3m1. ll centro di massa
delle due particelle è indicato con ×. (a) Sistema di riferimento
del laboratorio. (b) Sistema di riferimento del centro di massa.
163
Urti
Il centro di massa tra m1 e m2, prima e dopo l’urto si muove
con la stessa velocità costante vcm.
m1
vcm =
v1i
(10.33)
m1 + m2
Rappresentiamo ora lo stesso urto da un sistema di riferimento
in moto con la velocità vcm rispetto al laboratorio
0
v =v +u
(10.34)
Nel nostro caso, il sistema in moto è quello del centro di massa
e quindi u = vcm
m1
m2
v1i =
v1i (10.35)
m1 + m2
m1 + m2
m1
m1
0
v2i = v2i − vcm = 0 −
v1i = −
v1i (10.36)
m1 + m2
m1 + m2
m1 − m2
m1
m2
0
v1i −
v1i = −
v1i
v1f = v1f −vcm =
m1 + m2
m1 + m2
m1 + m2
(10.37)
2m1
m1
m1
0
v2f = v2f − vcm =
v1i −
v1i =
v1i
m1 + m2
m1 + m2
m1 + m2
(10.38)
Una serie di ”istantanee” dell’urto unidimensionale completamente anelastico tra due partice1le di masse m1 e m2 = 3m1.
(a) Sistema di riferimento del laboratorio. (b) Sistema di
riferimento del centro di massa.
Consideriamo ora l’urto unidimensionale completamente anelastico nel sistema di riferimento del centro di massa. Supponiamo di nuovo che m1 incida su m2 = 3m1 in quiete nel
laboratorio.
0
v1i = v1i − vcm = v1i −
164
Urti
Dopo l’urto:
0
vf = vf − vcm =
m1
m1
v1i −
v1i = 0
m1 + m2
m1 + m2
(10.39)
Corpo Rigido
11
165
Corpo rigido
Si definisce corpo rigido un sistema di punti materiali in cui le
distanze fra tutte le particelle che lo compongono rimangono
costanti durante l’applicazione di una forza o di un momento
esterni
Un corpo rigido conserva la sua forma durante il moto. Non
si deforma e non vibra
Possiamo distinguere due tipi di moto di un corpo rigido
• Moto di traslazione (a). Tutte le particelle descrivono
traiettorie parallele
• Moto di rotazione (b). Tutte le particelle descrivono
traiettorie circolari intorno a una retta chiamata asse di
rotazione
Il moto di un corpo rigido si può considerare come la combinazione di una traslazione più una rotazione
166
Corpo Rigido
è sempre possibile quindi determinare un sistema di riferimento soltanto traslante rispetto al quale il moto del corpo rigido
sia esclusivamente rotatorio
Rispetto a questo sistema di riferimento l’asse di rotazione è
il luogo dei punti istantaneamente fissi
L’asse di rotazione può spostarsi rispetto al riferimento o cambiare la direzione rispetto al corpo durante il moto
Il moto di un corpo rigido si studia considerando separatamente il moto traslatorio di un punto del corpo e quello rotatorio
intorno al punto stesso
Come origine del sistema di assi solidale con il corpo si sceglie
generalmente il CM
167
Corpo Rigido
Momento angolare di un corpo rigido
Si abbia un corpo rigido che ruota intorno ad un asse fisso z,
vincolato ad un riferimento inerziale, con velocità angolare ω
Il momento angolare della particella iesima Ai è
Li = miri × vi
dove vi = ω × ri
Si ha |vi| = ωri sin θi = ωRi
Li ha una direzione che forma un angolo pari ( π2 − θi) con
l’asse z e |Li| = mirivi
La componente di Li lungo l’asse z è
π
Liz = (mirivi) cos ( − θi) = mi(ri sin θi)(ωRi) = miRi2ω
2
Il momento angolare totale di tutte le particelle che compongono il corpo rigido risulta
X
L = L1 + L2 + . . . =
Li
i
168
Corpo Rigido
In generale L non è parallelo all’asse z perchè i singoli Li non
lo sono
La componente di L rispetto all’asse di rotazione risulta
X
Lz = L1z + L2z + . . . =
Liz
i
cioè
!
Lz =
ω(m1R12
+
m2R22
+ . . .) =
X
miRi2 ω
i
La quantità
I=
X
miRi2
(11.1)
i
è definita momento di inerzia del corpo rigido rispetto all’asse di rotazione z
La componente Lz di L può essere quindi scritta come
Lz = Iω
Il momento di inerzia è una grandezza molto importante utilizzata per lo studio del moto di un corpo rigido
Confrontando la definizione di quantità di moto e di momento
angolare
p = mv
Lz = Iω
si deduce come il momento di inerzia è l’analogo della massa
per quanto concerne le caratteristiche rotatorie di un corpo
rigido
Corpo Rigido
169
Dalla (11.1) si ricava come il valore di I dipende sia dalle masse che costituiscono il corpo che dal quadrato della distanza
rispetto all’asse di rotazione
Mentre la massa è una caratteristica di un corpo, il momento
di inerzia dipende dall’asse di rotazione
ESEMPIO: pattinatrice in rotazione rispetto a un asse verticale
Quando la pattinatrice solleva le braccia, modifica il proprio
momento di inerzia (I2 < I1)
Per il principio di conservazione del momento angolare del
sistema (pattinatrice) risulta
Lz = Iω = costante ⇒ I1ω1 = I2ω2
poiché I2 < I1 si ha ω2 > ω1
Assi principali di un corpo rigido
In ogni corpo rigido, indipendentemente dalla forma, esistono
sempre almeno tre assi di rotazione fra loro mutuamente perpendicolari e passanti per il CM , per i quali risulta L parallelo
aω
Questi tre assi vengono denominati assi principali di inerzia
I momenti di inerzia corrispondenti vengono denominati
• I1 il massimo momento di inerzia
• I2 il minimo momento di inerzia
• I3 il momento di inerzia intermedio
170
Corpo Rigido
Gli assi principali di inerzia sono solidali con il corpo e quando
esisteno assi di simmetria sono coincidenti con essi
Quando un corpo ruota attorno ad un principale di inerzia si
ha
L = Iω
(11.2)
In generale si utilizza un sistema di riferimento solidale con il
corpo rigido cosı̀ che I1,I2 e I3 sono quantità costanti
Calcolo dei momenti di inerzia
Un corpo rigido è composto da un numero estremamente elevato di particelle quindi l’eq (11.1) diventa
Z
I=
R2dm =
Z
R2ρdV
171
Corpo Rigido
Il momento di inerzia rispetto all’asse Z risulta
Z
Z
IZ = R2ρdV = ρ(X 2 + Y 2)dV
Se la densità ρ =
dm
dV
è costante
Z
I = ρ R2dV
Quando il corpo è omogeneo l’integrale si riduce al calcolo di
un fattore geometrico uguale per tutti i corpi con la stessa
forma
Dimensionalmente
I = [M ][L]2
Nel S.I. è espresso in m2Kg
Teorema di Steiner o degli assi paralleli (Teorema
di Lagrange)
I momenti di inerzia rispetto ad assi paralleli sono legati da
una formula molto semplice
172
Corpo Rigido
Sia dato un asse Z arbitrario e ZC un asse ad esso parallelo
e passante per il CM del corpo. Se a è la distanza fra i due
assi e M la massa del corpo, si ha
IZ = IZC + M a2
(11.3)
DIMOSTRAZIONE
Si ha
RC2 = x2 + y 2
R2 = x2 + (y + a)2 = RC2 + 2ya + a2
Il momento di inerzia rispetto all’asse Z é
X
X
2
2
2
IZ =
miRi =
mi RCi + 2yia + a =
i
i
!
=
X
miRC2 i
X
+ 2a
i
miyi
2
+a
X
i
P
Dalla definizione di CM abbiamo i miyi = 0 Inoltre
X
X
2
IZC =
miRCi ;
mi = M
i
i
i
mi
173
Corpo Rigido
Si ottiene quindi l’espressione
IZ = IZC + M a2
Il teorema di Steiner è molto utile per il calcolo di momenti di
inerzia non baricentrali
Raggio giratore di un corpo
Il Raggio giratore diq
un corpo K è definito dalla relazione
I = M K 2;
K = MI
è la distanza dall’asse di rotazione alla quale si potrebbe concentrare tutta la massa senza che il momento di inerzia cambi
Per corpi omogenei il raggio giratore dipende soltanto dalla
geometria del corpo
174
Corpo Rigido
Momento di inerzia di una lamina piana sottile
• Rispetto a X: IX =
R
ρY 2dV
• Rispetto a Y : IY =
R
ρX 2dV
• Rispetto a Z: IZ =
R
ρ(x2 + y 2)dV
IZ = IX + IY
175
Corpo Rigido
Momento di inerzia di una sbarra sottile omogenea
Calcoliamo il momento di inerzia rispetto ad un asse passante
per un estremo
Z
IA =
L
2
Z
L
ρx (Sdx) = ρS
0
0
1
x dx = ρSL3
3
2
Poichè V = SL si ha M = ρSL e
1
IA = M L2
3
Per calcolare il momento di inerzia rispetto ad un asse baricentrale, si utilizza il teorema di Steiner. Dalla (11.3) si
ha
1
2
IC = IA − M a = M L2 − M
3
2
L
1
= M L2
2
12
Lo stesso risultato è ottenuto anche calcolando IC tramite la
definizione
176
Corpo Rigido
Equazione del moto rotatorio
L’equazione fondamentale per il moto rotatorio di un corpo
rigido è:
dL
=τ
(11.4)
dt
Il momento meccanico e il momento angolare sono calcolati
rispetto ad un punto fisso in un sistema di riferimento inerziale
Quando il corpo rigido ruota intorno ad un asse principale di
inerzia risulta L = Iω e quindi
dL d (Iω)
dω
=
=I
=τ
dt
dt
dt
cioè
τ = Iα
(11.5)
dove α rappresenta l’accelerazione angolare
L’equazione (11.5) è formalmente simile alla F = ma
legge di inerzia per il moto rotatorio
Dalla (11.5) se il momento delle forze esterne è nullo, risulta
Iω = cost
Un corpo rigido che ruota intorno ad un asse principale si
muove di velocità angolare costante in assenza di momenti
meccanici esterni
Se I si modifica, ω cambia per mantenere L = cost
Se un corpo rigido è vincolato a ruotare intorno ad un asse z
non principale risulta Lz = Iω, quindi
dω
I
= τz
dt
177
Corpo Rigido
Non essendo L k ω sono necessari dei momenti meccanici,
forniti per esempio dal vincolo rigido, per mantenere il moto
rotatorio
Quando l’asse di rotazione non ha un punto fisso in un sistema
di riferimento inerziale, si applica l’equazione
dLC
= τCM
dt
(11.6)
Energia cinetica di rotazione
Dalla definizione di energia cinetica per un sistema di particelle
X1
mivi2
EK =
2
i
quando si tratta di un corpo rigido in rotazione vi = ωRi, si
ha
!
X1
1 X
2 2
EK =
miRi ω =
miRi2 ω 2
2
2
i
i
cioè
1 2
EK = Iω
2
(11.7)
L’equazione (11.7) è formalmente analoga alla EK = 21 mv 2
Quando il corpo rigido ruota attorno ad un asse principale,
utilizzando la (11.2) si ottiene
L2
EK =
2I
178
Corpo Rigido
Consideriamo un corpo rigido che ruota rispetto ad un asse
passante per il suo centro di massa ed è dotato di un moto
traslatorio rispetto all’osservatore
Nel sistema di riferimento L l’energia cinetica di un sistema è
1
2
EK = M vCM
+ E KC
2
quindi
1
1
2
EK = M vCM
(11.8)
+ IC ω 2
2
2
Poichè in un corpo rigido la mutua distanza fra le particelle non
può variare, le forze interne non lavorano e l’energia potenziale
interna rimane costante
EK − EK0 = Wext + Wint = Wext
In presenza di forze esterne conservative risulta
Wext = EP,ext0 − EP,ext
quindi
E = EK + EP = (EK + EP )0 = costante
L’energia totale è costante
1
1
2
E = M vCM
+ IC ω 2 + EP = costante
2
2
(11.9)
Un corpo rigido che cade sotto l’azione della forza di gravità
ha
1
1
2
E = M vCM + IC ω 2 + M gy = costante
2
2
dove y è l’altezza del CM del corpo rigido rispetto al riferimento orizzontale
179
Corpo Rigido
Moto di rotolamento senza strisciamento
In ogni istante il punto C è fermo. Il cilindro ruota intorno
ad un asse passante per C definito asse di istantanea rotazione
Se il cilindro ruota con velocità angolare ω e accelerazione α
risulta
vCM = ωr ;
aCM = αr
Il punto C è istantaneamente mantenuto fermo da una forza
di attrito statica fs che si esercita tra il piano ed il corpo
Il massimo valore che fs può assumere è µsN
Per valori maggiori di fs si produce strisciamento
Il rotolamento può essere studiato come una combinazione di
traslazione del CM e una rotazione attorno ad un asse per
CM con velocità angolare ω e accelerazione α
180
Corpo Rigido
v
v
v
2v
ωR=v CM
CM
v
CM
CM
CM
CM
−ωR=-v
P
traslazione
CM
P
P
rotazione
ESEMPIO:Cilindro omogeneo di raggio R che rotola lungo un
piano inclinato
Metodo dinamico
Il moto traslatorio è determinato assumendo tutte le forze
esterne applicate CM
N − M g cos θ = 0
M g sin θ − f = maCM
(11.10)
(11.11)
Il moto di rotazione è determinato dalla τCM = IC α
Per la composizione di forze parallele, la risultante delle forze
peso è applicata nel baricentro che coincide con il CM e quindi
non può originare rotazioni
181
Corpo Rigido
Il momento di N rispetto a CM è nullo perché la sua retta di
azione passa per CM
Risulta quindi
f R = IC α
Applicando la relazione cinematica aCM = αR e IC = 12 M R2
si determina
IC α M a
f=
=
(11.12)
R
2
M g sin θ 2
= g sin θ
aCM =
(11.13)
IC
3
M+ 2
R
Il moto è possibile se f ≤ µsM g cos θ
Diversamente il corpo rotolerà strisciando con forza di attrito
f = µd N
La velocità è ricavata dalla
2ay0 4
v 2 = 2al =
= gh
sin θ 3
q
cioè v = 43 gh
Conservazione dell’energia
Nell’ipotesi di moto di rotolamento senza strisciamento la forza
di attrito non compie lavoro in quanto applicata ad un punto
che rimane fermo
Applicando il principio di conservazione dell’energia (11.9)
Poiche vCM
1
1
2
M gy0 = M vCM
+ IC ω 2
2
2
= ωR si ha
2
1
1 vCM
2
M gy0 = M vCM + IC 2
2
2 R
182
si ricava v =
Corpo Rigido
q
4
3 gh
L’energia potenziale gravitazionale si trasforma in energia cinetica di traslazione e di rotazione
Gravitazione
12
183
Gravitazione
I Greci supponevano che la Terra fosse il centro geometrico
dell’Universo e che tutti i corpi celesti si muovessero attorno
ad essa
Tolomeo di Alessandria (II◦ d.C.) propose per i pianeti il moto epicicloidale: I pianeti descrivevano con moto uniforme una
circonferenza chiamata epiciclo. Il centro della circonferenza
a sua volta si muoveva su una circonferenza più grande concentrica con la terra
Descriveva il moto planetario in un sistema di riferimento
solidale con la Terra
Copernico (XVI◦ d.C) propose un modello eliocentrico in cui
il moto dei pianeti era descritto rispetto al Sole, considerato
come il centro. Descriveva il moto planetario in un sistema di
riferimento solidale con il Sole
Keplero (XVI◦ d.C) scoprı̀ le leggi del moto planetario:
1. I pianeti descrivono orbite ellittiche di cui il sole
occupa uno dei fuochi
184
Gravitazione
2. Il vettore posizione di ogni pianeta rispetto al Sole
descrive aree uguali in tempi uguali della sua orbita
ellittica
Legge delle aree:
∆A ∆A0
=
= cost
∆t
∆t0
3. I quadrati dei periodi di rivoluzione sono proporzionali ai cubi delle distanze medie dei pianeti dal Sole
La terza legge può essere espressa come
3
P 2 = krmedio
(12.1)
dove
• P = periodo di rivoluzione
• k= costante di proporzionalità
• rmedio= semisomma della distanza minima e massima dal Sole
Gravitazione
185
Dinamica planetaria
Le leggi di Keplero forniscono una descrizione cinematica del
moto dei pianeti
Newton (1642-1727) enunciò la Legge di gravitazione universale
Dalla legge delle aree
186
Gravitazione
Nell’intervallo di tempo dt la particella si sposta da P a P 0, si
ha
1
1
dA ≈ r(rdθ) = r2dθ
2
2
L’area spazzata nell’unità di tempo è
dA 1 2 dθ
= r
dt
2 dt
Se il moto della particella è prodotto da una forza centrale, il
momento angolare L è costante
L = mr2
dθ
dt
cioè
dA
dt
La legge delle aree di Keplero equivale alla affermazione che il
momento angolare è costante e quindi che la forza applicata
al pianeta è centrale:
La forza associata all’interazione gravitazionale è centrale
Se ammettiamo che l’interazione gravitazionale sia una proprietà universale della materia deve essere
L = 2m
F = M mf (r)
La forma di f (r) è stata determinata da Newton attraverso la
prima legge di Keplero
Un caso particolare della prima legge di Keplero è quando una
particella si muove di moto circolare uniforme
187
Gravitazione
La forza che agisce sulla massa è
v2
F =m
r
Poichè v =
2πr
P
risulta
F =
2 mr
4π 2
P
Applicando la terza legge di Keplero nel caso di orbita circolare
P 2 = kr3 si ha
m
1
(12.2)
F = 4π 2 2 ∝ 2
kr
r
L’interazione gravitazionale è attrattiva e varia inversamente al quadrato della distanza fra i due corpi
Newton verificò la correttezza della sua legge ipotizzando che
l’accelerazione di gravità g in prossimità della superficie terrestre fosse prodotta dallo stesso tipo di forza che la Terra
esercita sulla Luna Confrontando
F
=
g=
m
m
4π 2 kR
2
T
m
4π 2
=
kRT2
188
Gravitazione
dove RT è il raggio della Terra, con l’accelerazione centripeta
della luna aL = 2.72 10−3 ms−2, ottenne
g
≈ (60)2
aL
coincidente con il rapporto
2
r
≈ (60)2
RT
dove r è la distanza della Luna dal centro della Terra
Poichè le due accelerazioni sono inversamente proporzionali
al quadrato della distanza dal centro della Terra, la stessa
relazione è valida per le rispettive forze
Newton enunciò la Legge di gravitazione universale:
F =G
Mm
r2
L’interazione gravitazionale fra due corpi si può esprimere
mediante una forza centrale attrattiva proporzionale alle
masse dei corpi e inversamente proporzionale al quadrato
della distanza fra essi
G è denominata costante di Gravitazione universale
G = 6.67 10−11 m3kg −1s−2
Il valore accurato di G venne misurato da Cavendish nel 1798
utilizzando una bilancia di torsione
Gravitazione
189
L’attrazione gravitazionale produce un momento sulla sbarra
orizzontale e quindi una torsione del filo
Massa inerziale e massa gravitazionale
La massa inerziale di un corpo può essere misurata attraverso
la rilevazione della accelerazione prodotta su di essa da una
forza nota
F
mi =
a
La massa gravitazionale di un corpo può essere determinata
misurando la forza gravitazionale esercitata su di essa dalla
terra
F RT2
mg =
GMT
La massa inerziale e la massa gravitazionale sono fra loro proporzionali
Supponiamo che due corpi cadano in prossimità della superfi-
190
Gravitazione
cie terrestre, si ha
M m 1g
m1i a1 = G 2
RT
M m 2g
m2i a2 = G 2
RT
dividendo le due equazioni
m1i a1 m1g
=
m2i a2 m2g
ma a1 = a2 = g quindi
m2i
m1i
=
m1g m2g
Il valore di G è stato implicitamente scelto tale da porre
uguale a uno il rapporto fra la massa inerziale e la massa
gravitazionale
Energia potenziale gravitazionale
La forza gravitazionale, essendo centrale e dipendendo soltanto
dalla distanza, è una forza conservativa
191
Gravitazione
La forza che agisce su m è
GM m
F = − 2 û
r
L’energia potenziale dipende soltanto da r
P
Dalla F = − dE
dr si ricava
dEP
GM m
=
dr
r2
Integrando e attribuendo valore nullo all’energia potenziale per
r → ∞ si ottiene
Z EP
Z r
dr
EP =
dEP = GM m
2
0
∞ r
cioè
EP (r) = −
GM m
r
(12.3)
L’energia totale del sistema è
1
1 2
GM m
2
+ mvm
−
E = M vM
2
2
r
Quando M m possiamo supporre che M sia in quiete in
un sistema di riferimento inerziale, quindi
1 2 GM m
E = mv −
2
r
dove v e la velocità della massa m rispetto al CM
(12.4)
192
Gravitazione
2
Quando l’orbita è circolare si ha F = m vr e quindi
v 2 GM m
m =
r
r2
1 2 1 GM m
mv =
2
2 r
Introducendo l’espressione dell’EC nella (12.4) si ottiene
E=−
GM m
2r
(12.5)
L’energia totale è negativa
Questa proprietà è di validità generale per tutte le orbite ellittiche (o chiuse)
La natura chiusa dell’orbita significa che l’energia cinetica non
è sufficiente a far allontanare la particella sino all’infinito
La relazione fra l’energia totale e la traiettoria è
193
Gravitazione
ESEMPIO:Un satellite posto ad una altezza h riceve una spinta che produce una velocità iniziale v0. Determinare la traiettoria in funzione dell’energia totale
1
GMT m
E = mv02 −
2
R+h
Quando l’orbita è chiusa, la Terra occupa uno dei due fuochi.
Per i satelliti interplanetari, deve risultare E > 0
ESEMPIO:Velocità di fuga di un corpo dalla terra
La velocità di fuga è la minima velocità con cui un corpo deve
essere lanciato dalla superficie terrestre per potersi allontanare
indefinitamente dalla Terra
Deve essere
1 2 GMT m
E = mvf −
=0
2
RT
si ricava
r
vf =
2GMT
= 1.12 104 ms−1
RT
194
Gravitazione
Per un gas la velocità di agitazione termica risulta
r
3kT
v=
m
Quindi le molecole di gas ”leggeri” (H2, He) sfuggono più
rapidamente dalla atmosfera terrestre
ESEMPIO:orbita geostazionaria
Si abbia un satellite dotato di orbita concentrica e coplanare
con il piano equatoriale terrestre. Determinare l’altezza h per
la quale il satellite appare fermo visto dalla superficie terrestre,
cioè dotato di orbita geostazionaria
Il satellite è attratto dalla forza gravitazionale F
Poichè il moto è circolare uniforme deve essere a = ω 2r
Quindi
GM m
2
=
mω
r
r2
da cui
GM
r3 = 2
ω
La velocità angolare coincide con la velocità angolare di spin
della Terra
∆θ
2π
2π
ω=
=
=
= 7.3 10−5 s−1
∆t 1 giorno 60 · 60 · 24
195
Gravitazione
Si ricava r ≈ 4.2 107 m, circa 1/10 della distanza Terra-Luna
Risulta
h = r − RT = 3.5 107 m
Moto generale gravitazionale
Sezioni coniche
Una sezione conica è una curva generata da un punto che si
muove in modo tale che il rapporto fra la distanza da un punto
F (detto fuoco) e una retta H (detta direttrice) sia costante.
Questa costante è definita eccentricità .
Esistono tre tipi di coniche: ellisse ( < 1), parabola ( = 1) e
iperbole ( > 1)
Risulta
PF
PQ
Ponendo P F = r e F D = d, si ha P Q = F D − F B =
d − r cos θ
Quindi
r
=
d − r cos θ
=
196
Gravitazione
Risolvendo rispetto a r
d
= 1 + cos θ
r
(12.6)
Nel caso di una ellisse il punto A corrisponde a θ = 0 e il
punto A0 corrisponde a θ = π, per cui
r1 =
d
1+
r2 =
d
1−
Poiché r1 + r2 = 2a, il semiasse maggiore risulta
d
a=
1 − 2
(12.7)
p
b = a 1 − 2
(12.8)
Il semiasse minore è
Eccentricità in funzione dei parametri fisici del moto gravitazionale
Introducendo il potenziale efficace
L2
EPef f (r) = EP (r) +
2mr2
(12.9)
dove il momento angolare L = mr2 dθ
dt , l’espressione della
energia totale diventa
2
1
dr
+ EPef f
E= m
2
dt
197
Gravitazione
risolvendo rispetto a
dr
dt
si ha
s
2(E − EPef f )
dr
=
dt
m
Poiché
dr
dt
=
(12.10)
dr dθ
dθ dt ,
dalla (12.10) si ha
q
s
2(E−EP )
ef f
dr
mr2 2(E − EPef f )
m
=
=
dθ
dθ
L
m
dt
elevando al quadrato e introducendo la (12.9)
2
2 4
2
dr
m r 2[E − EP (r)]
L
=
−
dθ
L2
m
m2r2
(12.11)
Derivando la (12.6) rispetto a θ risulta
d dr
= − sin θ
2
r dθ
quindi
dr
dθ
2
r4 sin2 θ
=
d2
Sostituendo nella (12.11) ed eliminando r4 da ambo i membri,
si ha
2
2 2
d m 2[E − EP (r)]
L
sin2 θ =
−
(12.12)
2
2
2
L
m
mr
Dalla (12.6) si ha cos θ = dr − 1 inoltre
2
d 1
d2 2d 1
2
2
=1− 2 +
sin θ = 1 − cos θ = 1 −
−
− 2
r r
r 198
Gravitazione
sostituendo nella (12.12) si ottiene
d2 2d 1
2d2mE 2d2mEP (r) d2
1− 2 +
− =
−
− 2
r
r 2
L2
L2
r
Eliminando
otteniamo
d2
− r2
ed uguagliando i termini che dipendono da r
2d2mEP (r) 2d
−
=
2
L
r
cioé
L2
EP (r) = −
(12.13)
mdr
Per descrivere una sezione conica con centro di forza in un
fuoco, l’energia potenziale deve variare con la distanza come
1/r, quindi la forza deve variare come 1/r2
Uguagliando i termini costanti si ottiene
1
2d2mE
=1− 2
L2
cioé
2
1
L
E= 2
1− 2
2d m
Introducendo l’espressione del semiasse maggiore (12.7) si ottiene
L2
E=−
(12.14)
2dma
Introducendo l’espressione dell’EP (r) (12.3) nella (12.13) si
ottiene
GM m
L2
−
=−
r
mdr
199
Gravitazione
quindi
L2
= GM m
md
Per cui la (12.14) diventa
(12.15)
Mm
E = −G
2a
(12.16)
L’energia totale è negativa e funzione soltanto del semiasse
maggiore
Dalle (12.15) e (12.7) si ricava
L2 = GM m2d = GM m2a(1 − 2)
Ricavando a dalla (12.16) e risolvendo rispetto a , si ottiene
2E
=1+
m
2
L
GM m
2
(12.17)
L’eccentricità dell’orbita dipende dalla energia totale e dal
momento angolare
A una data energia totale possono corrispondere molti stati
con momento angolare ed eccentricità differenti
200
Gravitazione
La dimensione dell’orbita è determinata dall’energia mentre, per una data energia, la forma dell’orbita è determinata dal momento angolare
Campo Gravitazionale
La massa M produce nello spazio che la circonda una situazione fisica che chiamiamo campo gravitazionale Γ
L’intensità del campo gravitazionale prodotto da M nel punto
P è definita come la forza per unità di massa posta nel punto
P
F
GM
Γ=
= − 2 û
(12.18)
m
r
Il campo gravitazionale è sempre diretto verso la massa che lo
produce
201
Gravitazione
Risulta dalla (12.18)
F = massaΓ
Il campo gravitazionale si misura in m s−2 ed è dimensionalmente equivalente ad una accelerazione
Supponiamo di avere diverse masse M1, M2, M3, . . . ciascuna
delle quali produca il campo gravitazionale Γ1, Γ2, Γ3, . . .
La forza totale che agisce sulla massa m è
F = mΓ1 + mΓ2 + mΓ3 + . . . = m(Γ1 + Γ2 + Γ3 + . . .) = mΓ
I campi gravitazionali sono linearmente additivi
Un campo gravitazionale è rappresentato attraverso le linee
di forza
202
Gravitazione
Una linea di forza è disegnata in modo che in ciascun punto
la direzione del campo sia tangente alla linea di forza
Le linee di forza sono disegnate con densità proporzionale
all’intensita del campo gravitazionale
Potenziale gravitazionale
Il potenziale gravitazionale in un punto è definito come l’energia potenziale per unità di massa posta nel campo gravitazionale
EP
Φ=
m
Introducendo l’espressione di EP dalla (12.3)
Φ=
−GM
r
(12.19)
In presenza di diverse masse M1, M2, M3, . . . si ha
X Mi
M1 M2 M3
Φ = −G
+
+
+ . . . = −G
r1
r2
r3
ri
i
Poiché F = mΓ e EP = mΦ, si ha
Γ = −∇Φ
(12.20)
Il campo gravitazionale è l’opposto del gradiente del potenziale
gravitazionale
Se una particella di massa m si sposta da un punto A a un
punto B, il lavoro del campo gravitazionale risulta
W = −∆EP = −m∆Φ
Gravitazione
203
Le superfici per le quali il potenziale gravitazionale assume lo
stesso valore sono definite superfici equipotenziali
La direzione del campo gravitazionale è perpendicolare alle
superfici equipotenziali
Campo gravitazionale di un guscio sferico
Tutte le formule riportate sino a qui sono valide rigorosamente
per corpi puntiformi
Ci proponiamo di calcolare il campo gravitazionale prodotto
da una massa distribuita uniformemente sulla superficie di una
sfera cava
Consideriamo un punto P posto all’esterno del guscio
Dividiamo la superficie della sfera in tante strette striscie circolari aventi centro sulla retta AB. Il raggio di ogni striscia è
a sin θ e la larghezza a dθ
L’area della striscia è
Area = (2πa sin θ)(a dθ) = 2πa2 sin θ dθ
204
Gravitazione
Se M è la massa totale, la massa per unità di area è M/4πa2
e la massa contenuta in una striscia circolare
M
1
2
sin
θ
dθ)
=
M sin θ dθ
(2πa
2
4πa
2
Tutti i punti della striscia si trovano alla stessa distanza R
da P . Il potenziale gravitazionale prodotto dalla striscia in P
risulta
dΦ = −G
1
2M
sin θ dθ
GM
=−
sin θ dθ
R
2R
Poiché si ha per la legge dei coseni
R2 = a2 + r2 − 2ar cos θ
Differenziando otteniamo
2R dR = 2ar sin θ dθ
cioé
R dR
sin θ dθ =
ar
Per cui
GM
dR
dΦ = −
2ar
Per ottenere il potenziale gravitazionale totale dobbiamo integrare su tutta la superficie della sfera
205
Gravitazione
Per un punto P esterno alla sfera i limiti di R sono r − a
corrispondente al punto A e r + a corrispondente al punto B
Per cui
Z r+a
GM
GM
GM
Φ=−
dR = −
2a = −
(r > a)
2ar r−a
2ar
r
Per un punto P interno alla sfera i limiti di R sono a − r e
a+r
Per cui
Z
GM
GM a+r
GM
dR = −
2r = −
(r < a)
Φ=−
2ar a−r
2ar
a
Il potenziale gravitazionale per punti interni al guscio sferico
è costante
Il campo gravitazionale si ricava dalla (12.20)
GM
Γ = − 2 û
r
Γ=0
(r > a)
(12.21)
(r < a)
(12.22)
206
Gravitazione
Campo gravitazionale di una sfera piena
Consideriamo una sfera solida omogenea
Possiamo considerare la sfera costituita da una sovrapposizione ’a cipolla’ di sottili gusci sferici
Gravitazione
207
Al di fuori della sfera, ciascuno strato produce un campo dato
dalla (12.21) Poiché per P la distanza r dal centro della sfera
è la stessa per tutti gli strati le masse si sommano e si ottiene
di nuovo il risultato della (12.21)
Una sfera piena omogenea produce nei punti esterni un
campo e un potenziale gravitazionale identici a quelli di
una particella della stessa massa situata nel centro della
sfera
Per ottenere il campo internamente alla sfera omogenea consideriamo un punto P a distanza r
208
Gravitazione
I gusci con raggio maggiore di r non contribuiscono al campo
in P , in accordo con la (12.22)
I gusci con raggio minore di r producono un campo in accordo
con la (12.21)
Detta m0 la massa all’interno della sfera tratteggiata
Gm0
Γ = − 2 û
r
Poiché la sfera é omogenea la densità é M/(4πa3/3), quindi
3
M
4
M
r
m0 = 4 3 ( πr3) = 3
3
a
3 πa
Risulta
GM r
Γ = − 3 û (r < a)
a
Il campo gravitazionale varia linearmente all’interno di una
sfera piena
209
Gravitazione
Principio di equivalenza
Poiché la massa inerziale e la massa gravitazionale sono uguali
si ha che
Tutti i corpi posti nel medesimo luogo sono soggetti alla
stessa accelerazione
Consideriamo un punto dove il campo è Γ, l’accelerazione per
un corpo di massa m posto in quel punto è
F
a=
=Γ
m
indipendentemente dalla massa m
Consideriamo due sistemi di riferimento
1. S non accelerato (inerziale) immerso in un campo gravitazionale uniforme
2. S 0 uniformemente accelerato rispetto ad esso con a =
−g ma non immerso in un campo gravitazionale
Vale il principio di equivalenza:
Un osservatore non è in grado di distinguere se il suo
laboratorio è solidale con S o con S 0
210
Gravitazione
principio di relatività generale
Le leggi della natura si devono scrivere in modo tale che sia
impossibile distinguere fra un campo gravitazionale uniforme e un sistema accelerato
Gravitazione e forze intermolecolari
Le forze gravitazionali permettono di descrivere in modo accurato il moto dei pianeti A livello molecolare l’EP della molecola
di H2
mm0
EP = −G
= 2.22 10−54 J = 1.39 10−35 eV
r
dove m = m0 = 1.67 10−27 Kg e r = 0.745 10−10 m
L’energia effettiva del legame risulta
E = 7.18 10−19 J = 4.48 eV
L’energia gravitazionale non è responsabile della formazione
della molecola di idrogeno
Gravitazione
211
Le forze presenti a livello atomico sono del tipo elettromagnetico e sono enormemente maggiori della forza gravitazionale
La forza gravitazionale diventa importante in presenza di grandi masse elettricamente neutre
212
13
Termodinamica
Termodinamica
Aspetti microscopici e macroscopici
Lo studio dei sistemi fisici contenenti un numero elevato di particelle non può essere affrontato con le equazioni usuali della
dinamica dei sistemi.
Ad esempio 1g di acqua contiene N = 3 1022 molecole e lo
studio dettagliato richiederebbe 3N equazioni differenziali interdipendenti e la conoscenza di 6N condizioni iniziali. Lo
studio si può affrontare sia mediante la meccanica statistica
(che tratteremo brevemente più avanti) sia mediante l’approccio macroscopico inteso come studio del sistema con grandezze di tipo globale cioè riassuntive di ciò che avviene a livello
microscopico
Il metodo termodinamico
Il metodo termodinamico o macroscopico consiste nel definire
operativamente poche osservabili fisiche dette variabili termodinamiche o coordinate macroscopiche e nel trovare equazioni
generali che le collegano.
Ad esempio, se consideriamo come sistema il contenuto di un
cilindro di un motore a scoppio, possiamo descrivere il sistema
in termini di: composizione, volume, pressione e temperatura.
Queste possono essere le variabili del sistema. Le loro caratteristiche principali:
1. Sono suggerite più o meno direttamente dai nostri sensi
Termodinamica
213
2. Sono in numero relativamente piccolo
3. Possono essere misurate direttamente
4. Non implicano alcuna ipotesi sulla struttura della materia
I sistemi termodinamici di interesse sono numerosi: il vapore d’acqua che compie lavoro in un impianto di produzione
d’energia, l’ammoniaca che vaporizzando raffredda un corpo,
ecc.
Sistema, ambiente, frontiera
Prima di procedere diamo alcune definizioni:
• Sistema termodinamico: una qualsiasi porzione di materia che contenga un numero n → ∞ di particelle.
Ogni oggetto che sia percepibile dai sensi di un essere
umano è un sistema termodinamico.
• frontiera: è una superficie chiusa contenente tutte le
particelle del sistema e nessuna ad essa estranea.
• ambiente: la porzione dell’universo circostante il sistema (e non facente parte del sistema stesso) è l’ambiente.
Stati termodinamici e variabili di statoi
Le condizioni in cui si trova un sistema termodinamico rappresentano lo stato del sistema stesso. Esse sono individuate da
214
Termodinamica
un certo numero di grandezze macroscopiche dette variabili
termodinamiche.
Poichè in termodinamica ci si occupa principalmente di scambi
energetici si sceglieranno quelle variabili termodinamiche tali
che una loro variazione sia legata ad uno scambio energetico.
Le variabili termodinamiche possono essere:
• estensive: quando il loro valore, per un sistema costituito dall’unione di due sottosistemi, è dato dalla somma dei due valori dei sottosistemi. Esempio: Volume,
Massa, Energia Cinetica.
• intensive: quando il loro valore, per un sistema costituito dall’unione di due sottosistemi, è lo stesso valore per
i due sottoinsiemi. Esempio: Pressione, Temperatura,
Forze.
Vedremo che uno scambio energetico si può esprimere mediante il prodotto di due variabili termodinamiche: una estensiva
ed una intensiva.
Noi ci occuperemo sopratutto di scambi di energia termica e
meccanica; come conseguenza avremo solo due variabili termodinamiche indipendenti.
Equilibrio termodinamico
Un sistema in equilibrio termodinamico soddisfa alle seguenti
condizioni:
1. Equilibrio meccanico: non esistono forze non equilibrate
che agiscono sul sistema o su singole parti di esso.
Termodinamica
215
2. Equilibrio chimico: non hanno luogo reazioni chimiche
all’interno del sistema, né movimenti di costituenti chimici da una parte all’altra del sistema.
3. Equilibrio termico: non esistono differenze finite di temperature fra le varie parti del sistema, né fra il sistema e
l’ambiente circostante.Si ammettono differenze infinitesime.
In un sistema termodinamico in equilibrio le variabili termodinamiche non variano nel tempo.
Funzioni di stato ed equazioni di stato
Scelte le variabili termodinamiche caratteristiche di uno stato
di equilibrio termodinamico, si possono definire un certo altro
numero di grandezze termodinamiche dipendenti dalle prime.
Queste variabili dipendenti possono essere funzioni di stato
nel senso che il loro valore dipende solo dallo stato del sistema
e non dalla storia precedente.
Se consideriamo una certa quantità di gas racchiuso in un
recipiente e misuriamo P, V, T, ci accorgiamo che fissate due
funzioni di stato la terza è sempre determinata.
Questo significa che delle tre funzioni di stato solo due sono
indipendenti.
L’equazione che connette le tre funzioni all’equilibrio prende
il nome di equazione di stato.
Supponiamo di avere ad esempio: V funzione di T e P , ossia
V = V (T, P )
216
Termodinamica
Il passaggio tra due condizioni di equilibrio infinitamente vicine implica in generale una variazione dV , dT e dP .
Un teorema del calcolo differenziale permette di scrivere
∂V
∂V
dV =
dT +
dP
∂T P
∂P T
cioè siamo in presenza di differenziali esatti per dV ,dT e dP .
Per queste si può scrivere se z = z(x, y)
∂z
∂z
dz =
dx +
dy
∂x y
∂y x
Nota:
Ogni infinitesimo in termodinamica deve rappresentare una
variazione piccola della grandezza considerata (rispetto al suo
valore) ma deve allo stesso tempo essere sufficientemente grande in modo da potersi riferire ad un numero di molecole talmente elevato da giustificare l’approccio macroscopico.
Trasformazioni termodinamiche
Quando un sistema termodinamico cambia di stato si dice che
il sistema effettua una trasformazione.
Le trasformazioni più importanti sono:
1. Trasformazioni tra stati di equilibrio: Sono quelle trasformazioni che avvengono tra due stati di equilibrio
(iniziale e finale). Poiché un sistema isolato in equilibrio permane nel suo stato occorre che questo sistema
scambi energia con l’ambiente per poter cambiare stato.
Termodinamica
217
2. Trasformazioni cicliche: Sono trasformazioni cicliche
quelle che hanno lo stesso stato termodinamico come
stato iniziale e come stato finale.
3. Trasformazioni quasi statiche: Trasformazioni che avvengono solo attraverso stati di equilibrio. In natura non
esistono e sono un caso limite delle trasformazioni reali. Esempio: gas in un cilindro verticale con pistone sul
quale si mettono una alla volta granelli di sabbia.
4. Trasformazioni reversibili : Trasformazioni percorribili
nei due sensi. Le tre condizioni per le trasformazioni
inverse sono:
• le sorgenti di calore recuperano le quantità di calore
• i dispositivi esterni recuperano l’energia
• non avvengono altri fenomeni
5. Trasformazioni irreversibili : Il sistema termodinamico
e l’ambiente esterno non possono essere ricondotti alla
situazione iniziale: si hanno in questo caso:
• trasformazioni non tra stati di equilibrio
• presenza di effetti dissipativi (attriti, viscosità,...)
• entrambi i casi precedenti
Quindi le trasformazioni reversibili devono avvenire in
un modo quasi statico e senza effetti dissipativi.
Esempio: volano con freno in una scatola isolata con gas.
218
Termodinamica
6. Trasformazioni spontanee: Quando un sistema isolato
lontano dall’equilibrio si porta in un stato di equilibrio
si ha una trasformazione spontanea. Esempio: sbarretta
metallica con temperature diverse all’estremità.
7. Trasformazioni lontane dall’equilibrio: Sistema non
isolato che si trasforma rimanendo lontano dall’equilibrio.
Rappresentazione grafica di stati e trasformazioni
Uno stato di equilibrio di un sistema termodinamico caratterizzabile mediante n variabili di stato indipendenti si può
rappresentare mediante un punto in uno spazio n dimensionale.
Nel caso di scambi energetici di due tipi (termico e meccanico)
è n = 2.
Quindi le trasformazioni reversibili sono rappresentabili da linee nel piano (n = 2). Le trasformazioni irreversibili non possono essere descritte da linee nel piano perché non si conoscono
le coordinate termodinamiche. A volte si usa rappresentarle
con una linea tratteggiata.
Esempio di trasformazione reversibile
Si abbia un recipiente con pareti adiatermane con un pistone
adiatermano, contenente un miscuglio di acqua e di ghiaccio.
Termodinamica
219
A. Aumento i pesi → diminuisce il ghiaccio
B. Riduco i pesi → aumenta il ghiaccio
Nota: l’acqua (come il Bi,Ag...) solidificando aumenta il volume Molto spesso si usa il piano p − V o piano di Clapeyron
per descrivere i sistemi gassosi.
Equilibrio termico
Gli esperimenti mostrano che lo stato di equilibrio di un sistema dipende dalla vicinanza di altri sistemi o dalla natura
220
Termodinamica
delle pareti di separazione che possono essere: adiatermane o
diatermiche (diatermane).
Si abbiamo i seguenti sistemi A e B posti a contatto:
Con la parete diatermica i valori x,y e x0 ,y 0 cambiano spontaneamente fino a che il sistema complessivo non raggiunge uno
stato di equilibrio. Si dice che i due sistemi sono in equilibrio
termico. In altre parole: L’equilibrio termico è quello stato,
caratterizzato da certi valori delle variabili, che due o più sistemi raggiungono quando vengono posti a contatto tramite
una parete diatermica.
Consideriamo ora due sistemi A e B separati da una parete
adiatermana ma singolarmente a contatto con un terzo sistema
C per mezzo di pareti diatermiche.
Termodinamica
221
L’esperienza mostra che se A e B sono separatamente in equilibrio termico con C nel caso 1 essi allora sono in equilibrio
termico tra loro (caso 2).
Si può allora enunciare il principio zero della termodinamica:
Due sistemi in equilibrio termico con un terzo sono in equilibrio
termico tra loro.
In pratica viene utilizzato per misurare la temperatura di
oggetti (A, B) mediante un termometro (C).
Temperatura
Possiamo usare il sistema C (termoscopio) per classificare gli
stati di equilibrio termico purché C subisca delle variazioni
vistose dei suoi parametri.
Esempio: l’immersione di una barretta metallica (C) in due
recipienti separati (A) e (B) con la misura dell’allungamento
della barretta. L’indice di stato di equilibrio termico viene
chiamato temperatura. In altre parole:
La temperatura di un sistema è quella proprietà che determina
se un sistema è in equilibrio termico o meno con altri sistemi.
222
Termodinamica
Misura della temperatura
Per stabilire una scala empirica della temperatura dobbiamo
scegliere un sistema descritto dalle coordinate x e y che chiameremo termometro. Consideriamo un sistema A, descritto
dalle due coordinate termodinamiche x1, y1 in equilibrio termico con un sistema B descritto dalle due coordinate x01, y10 .
Prendiamo ora il sistema A, allontaniamolo da B, che abbiamo mantenuto nel suo stato iniziale; riportiamolo in contatto
diatermano con B entro breve tempo si raggiungerà un nuovo
stato di equilibrio termico del sistema A con lo stato del sistema B sempre rappresentato da x01, y10 : siano x2 e y2 le due
nuove coordinate che descrivono il nuovo stato di equilibrio
del sistema A. Riprendiamo ora il sistema A, allontaniamolo
nuovamente da B, modifichiamolo e riportiamolo in contatto
diatermano con B, ripetendo più volte l’esperimento: tutte le
volte il sistema A si riporterà in equilibrio termico col sistema
B e di volte in volta sarà descritto dalle coppie di coordinate
x3,y3; x4,y4;...
I vari stati del sistema A rappresentati dalle coppie di coordinate x1, y1; x2, y2; x3, y3;..., essendo tutti in equilibrio col
sistema B nello stato x01, y10 per il principio zero della termodinamica, sono anche in equilibrio termico tra loro. Rappresentando i diversi stati del sistema A in equilibrio col sistema B
nel piano (x, y) la linea che congiunge i vari punti x1, y1; x2,
y2; x3, y3;...si chiama isoterma; definiamo perciò una isoterma come il luogo dei punti del piano (x, y) che rappresentano
i vari stati di equilibrio di un sistema con un determinato stato
di un altro sistema. Per ottenere una indicazione univoca si
223
Termodinamica
procede scegliendo nel piano (x, y) la linea y = y 0 che interseca
le isoterme in punti con la stessa y ma coordinata x diversa.
La temperatura associata a ogni isoterma è una funzione di x
nei punti di intersecazione. Si definisce:
• x = grandezza termometrica
• t = temperatura
e si può scrivere quando un fenomeno dipende linearmente da
t:
t = ax + b
224
Termodinamica
Esempi:
Gas a volume costante; x = Pressione (P )
Resistore elettrico; x = Resistenza elettrica (R)
Liquido in un capillare; x = Lunghezza (L)
Termocoppia; x = f. e. m. (e)
Occorre scegliere un sistema termodinamico campione per avere un riferimento preciso e determinare le costanti a e b.
O meglio poiché per due punti nel piano passa una sola retta
occorre trovare due particolari fenomeni fisici che definiscono
i due punti di riferimento.
Le scale di temperatura attualmente più usate sono tre: la scala Celsius (centigrada), la scala Fahrenheit, la scala Kelvin.
Nella scala Celsius i due punti fissano la temperatura del ghiaccio fondente (valore 0) e la temperatura di ebollizione dell’acqua (valore 100); dividendo per 100 l’intervallo si ottiene il
grado Celsius (◦C).
La scala Kelvin o scala assoluta ha gli stessi punti fissi ma gli
attribuisce i valori 273.15 e 373.15. Dividendo sempre per 100
l’intervallo si ottiene il grado kelvin (K). Lo zero di questa
scala si chiama zero assoluto ed è la più bassa temperatura
raggiungibile da qualsiasi fenomeno fisico.
Si hanno le relazioni:
1 ◦C = 1 ◦K =
9◦
F
5
9 ◦
t C = 32 + t F
5
◦
225
Termodinamica
L’equazione di stato dei gas ideali
Supponiamo di essere nelle condizioni di gas ideale o gas perfetto e cioè:
Si considera che:
1. Il gas è composto da un numero enorme di molecole.
2. Esse si muovono in maniera casuale con varie velocità. Si
suppone valida la meccanica di Newton a livello atomico.
3. Il volume delle molecole è trascurabile rispetto a quello
occupato dal gas
4. Le molecole interagiscono solo durante gli urti altrimenti
si muovono come particelle isolate.
5. Gli urti sono perfettamente elastici e di durata trascurabile.
Le leggi di questo gas sono le seguenti:
Legge di Charles
A pressione costante, la relazione che lega la temperatura e il
volume di un qualunque gas è lineare:
V = V0(1 + αt)
α = coef f. di dilatazione termica
Dove V0 è il volume del gas quando t = 0 ◦C e dove α rappresenta la variazione di volume del gas rispetto al volume
226
Termodinamica
unitario V0 quando la temperatura è aumentata di 1 ◦C. Se
come riferimento viene preso t0 = 0 ◦C il valore di α è di
1
◦ −1
e quindi si può scrivere:
273.15 C
V = V0(1 +
t
)
273.15
Legge di Gay - Lussac
A volume costante, la relazione che lega la temperatura e la
pressione di un qualunque gas è lineare:
P = P0(1 + αt)
Se t0 = 0 ◦C allora si ha ancora che α =
t
)
P = P0(1 +
273.15
1
◦ −1
273.15 C
e
227
Termodinamica
Estrapolando le due rette (V, t) e (P, t) si ottiene il valore di
temperatura (-273,15) alla quale il gas non occupa volume e
la sua pressione è nulla.
Questo valore di temperatuta viene chiamato zero assoluto che
corrisponde a -273,15 ◦C. Si può perciò utilizzare una scala
termometrica che ha come zero proprio lo zero assoluto:
T = t + 273, 15
e viene misurata in Kelvin (K)
Legge di Boyle
A T costante tutti i gas, considerati perfetti, seguono la seguente legge:
P V = costante
228
Termodinamica
Le leggi sperimentali riportate mettono in relazione solo due
variabili termodinamiche mentre una rimane costante. Ora ci
proponiamo di trovare una legge che leghi tutte e tre le variabili. Cioé l’equazione di stato del gas perfetto. Si consideri una
mole di un gas perfetto alle condizioni normali cioé P0 = 1atm
e t0 = 0 ◦C.
Per mole si intende un numero di entità pari al numero di
Avogadro NA = 6.02 1023.
Una mole di gas perfetto a condizioni normali occupa un volume Ve di 22.414 l.
Attraverso le trasformazioni che conosciamo, per esempio isobara (legge di Charles) e isoterma (legge di Boyle) portiamo
il gas alle condizioni generiche P , V e T .
229
Termodinamica
tratto 0-1
t
V1 =V0 1 +
273.15
V0T
V1 =
273.15
= V0
t + 273.15
273.15
(13.1)
(13.2)
tratto 1-2
P V = P0 V1
Introducendo la (13.2)
PV =
P0 V0
T
273.15
P0 V 0
273.15
= costante il cui valore non dipende dal tipo di gas ma
solo dalle unità di misura utilizzate
P0 V0
J
cal
l atm
= R = 8.31
≈2
= 0.08206
273.15
mole K
mole K
mole K
P V = RT mentre per n moli:
P V = nRT
(13.3)
230
Termodinamica
che è proprio la relazione che cercavamo che prende il nome di
legge dei gas perfetti od equazione di stato dei gas perfetti.
Si può anche scrivere n = NN e quindi
A
R
T
PV = N
NA
introducendo la costante k = 1.3807 10−23 KJ dettacostante di
Boltzmann si ha:
pV = kN T
quindi per bassi rapporti
della pressione del gas.
N
V
si può ricavare T dalla misura
Unità di misura della pressione
L’unità di misura della pressione si esprime come il rapporto
tra una unità di forza e una unità di superficie.
F⊥
A
Nel S. I. si avrà N/m2 che in onore di B. Pascal è stata
chiamata Pascal (P a) quindi:
P =
1
N
= 1 Pa
2
m
La pressione viene talvolta misurata in unità di altezza equivalente di un dato liquido.
Consideriamo una colonna di fluido di altezza h e sezione A.
Il peso sarà
F = mg = ρAhg
231
Termodinamica
mentre la pressione è
P =
F
= ρgh
A
La più comune unità di questo tipo è il mm di Hg detto (torr)
definito come: la pressione esercitata da una colonna di mercurio liquido alta 1mm posta in un campo gravitazionale standard a 0◦C
Quindi essendo g = 9.806 sm2 e ρ = 13.59 103 Kg
si ha:
m3
Kg
N
P = 133.3
= 133.3 2 = 133.3 P a = 1 mmHg
ms2
m
Altra unità di misura è l’atmosfera:
1 atm = 1.013 105 P a = 760 mmHg
Si ha inoltre:
105 P a = 1 bar
Termometri
Termometro a gas
Uno schema semplificato è il seguente:
232
Termodinamica
Il serbatoio del mercurio viene alzato ed abbassato in modo
da mantenere il livello a sinistra nell’indice costante.
La pressione del bulbo è uguale a h più la pressione atmosferica.
Si misura la differenza di quota h quando il bulbo è a contatto
con il punto triplo dell’acqua e poi con il sistema da misurare,
quindi si ha da h la misura della temperatura:
Termometro a resistenza
Sono termometri piuttosto precisi. Il più usato è il termometro
a resistenza di platino.
Si tratta di un lungo e sottile filo avvolto su un supporto. Si
misura la resistenza elettrica del filo. Si usa tra 20 e 1500 K.
Con intervalli di T non ampi si ha:
R = R0(1 + αT + βT 2)
Termodinamica
233
Termometro a liquido in capillare di vetro
E’ costituito da un capillare a sezione costante connesso a un
serbatoio (bulbo) pieno di liquido.
Poichè: T = aL + b dove: a e b sono costanti nel termometro
e L = lunghezza del liquido nel capillare
Poiché ci sono due costanti si scelgono due T note:
T1 = aL1 + b e T2 = aL2 + b
quindi si ottiene:
T2(L − L1) + T1(L2 − L)
T =
L2 − L1
I termometri di questo tipo più utilizzati sono:
• termometro a mercurio (da −38.9 ◦C solidificazione Hg
a +356.6 ◦C ebollizione Hg)
• termometro ad alcool etilico (da −115 ◦C a 78 ◦C)
Questi termometri non sono molto precisi perché la legge di
dilatazione non è perfettamente lineare.
234
Termodinamica
Classificazione delle trasformazioni termodinamiche
Modalità della trasformazione
Differiscono lo stato iniziale
da quello finale
A volume costante; V = cost
A pressione costante; P =
cost
A temperatura costante; T =
cost
Sistema termicamente isolato, cioé delimitato da pareti
adiabatiche
Stato finale = stato iniziale
Denominazione della trasformazione
Aperta
Isocora
Isobara
Isoterma
Adiabatica
Ciclica (o chiusa)
Il calore
Come è ben noto due corpi posti a contatto raggiungono una
temperatura intermedia fra quelle di partenza.
Fin al XIX sec. il fenomeno veniva spiegato con una sostanza
detta calorico. Oggi sappiamo che il calore è una forma di
energia che viene scambiata.
Diciamo che l’interazione termica ha trasferito un’entità fisica
misurabile chiamata calore o quantità di calore Q.
Per definizione si ha:
1. Il calore passa dal corpo più caldo al corpo più freddo.
235
Termodinamica
2. L’unità di misura é: caloria (cal) è la quantità di calore
per riscaldare 1 g di H2O da 14.5 → 15.5 ◦C a pressione
atmosferica.
1 cal = 4.186 J
3. Per n grammi di H2O occorrono n calorie per la stessa
trasformazione termica del 2).
Per misurare il calore si usa il calorimetro.
Uno schema semplificato é:
La quantità di calore non è una funzione di stato. Cioè la
quantità di calore scambiata da un sistema non dipende solo
dagli stati iniziali e finali ma da tutta la trasformazione.
Le variazioni delle funzioni non di stato si indicano con d∗
oppure δ per distinguerle dai differenziali esatti. Si adotta la
convenzione:
• Q > 0 quando il calore entra nel sistema
• Q < 0 quando il calore esce dal sistema
236
Termodinamica
Capacità termica e calore specifico
Si definisce capacità termica media di un sistema durante
una trasformazione Λ,
Q
Q
CM,Λ =
=
T2 − T1 Λ
∆T Λ
Si definisce capacità termica istantanea la quantità di calore
(δQ) che deve entrare nel sistema per variare la sua temperatura di dT . Si ha
δQ
CΛ = lim CM,Λ =
∆T →0
dT Λ
• CP = δQ
dT P
capacità termica a pressione costante
• CV = δQ
dT V
capacità termica a volume costante
E’ utile definire le capacità termiche per unità di massa che
vengono chiamati calori specifici: è la quantità di calore che si
deve fornire all’unità di massa di una sostanza per aumentare
di un grado la sua temperatura
h i
1
1 Q
cal
• cM,Λ = m CM,Λ = m ∆T gK
calore specifico medio
1
1 δQ
• cΛ = CΛ =
m
m dT Λ
calore specifico istantaneo
237
Termodinamica
Da quest’ultima si può definire inoltre:
Z
δQ = mcΛdT
Q=m
T2
cΛ dT
T1
Questa relazione prende il nome di Relazione fondamentale
della termologia.
Sorgenti di calore
Sorgente di calore = termostato, scambia calore senza cambiare la sua temperatura
dT =
δT Q
=0
mc
deve essere m → ∞
Esempi:oggetti di grande massa
Transizioni di fase e calori latenti
I materiali si possono presentare a seconda delle variabili di
stato in diverse fasi o stati di aggregazione
1. Stato solido
2. Stato liquido
3. Stato gassoso
Un modo di rappresentare le fasi è il diagramma P − T
238
Termodinamica
TC = temperatura critica
Le transizioni di fase richiedono un assorbimento di calore che
viene restituito nella trasformazione inversa.
Si definisce calore latente di transizione la quantità di calore,
per unità di massa, che deve essere scambiata nella transizione.
Si definisce in particolare:
a calore latente di sublimazione
transizione solido → gas
b calore latente di fusione
transizione solido → liquido
c calore latente di solidificazione
transizione liquido → solido
d calore latente di vaporizzazione
transizione liquido → vapore
239
Termodinamica
Esempio:
Acqua: calore latente di fusione 80 Kcal/Kg calore latente di
vaporizzazione 540 Kcal/Kg
Bilanci termici. Equilibri termici
Supponiamo di avere all’interno di un recipiente adiabatico
(calorimetro) due corpi (o liquidi) che si trovano inizialmente
a temperature diverse.
Nel caso non ci siano transizioni di fase mentre i due corpi si
scambiano calore si ha:
calore uscito da A (QA) = calore entrato in B (QB )
−QA = QB
Z
Tf
Z
cA dT
QA = mA
Tf
cB dT
QB = mB
Ti,B
Ti,A
Nel caso cA = costante e cB = costante, si ha :
QA = mAcA(Tf − Ti,A)
QB = mB cB (Tf − Ti,B )
e quindi
Tf =
Ti,AmAcA + Ti,B mB cB
mAcA + mB cB
Nel caso che uno dei due corpi subisca una transizione di fase
di calore latente λ, tra Ti ed Tf , il suo calore assorbito nella
transizione sarà:
Z Tt
Z Tf
Q=m
c dT + mλ + m
c0 dT
Ti
Tt
240
Termodinamica
dove Tt=temperatura della transizione, c=calore specifico prima della transizione,c0=calore specifico dopo la transizione
Il Lavoro in termodinamica
Se un sistema esercita una forza sull’ambiente e ha luogo uno
spostamento della frontiera il lavoro compiuto dal o sul sistema
prende il nome di lavoro esterno.
Esempio: gas in un cilindro che si espande facendo muovere
un pistone. Non è compreso nel lavoro esterno:
a il lavoro compiuto dalle forze interne (lavoro interno)
b lavoro scambiato con l’esterno che non provoca uno spostamento della frontiera a livello macroscopico
Calcoliamo il lavoro esterno scambiato tra un sistema e l’ambiente nel caso che: dF =forza normale all’elemento di frontiera dσ
Si ha:
dF = pF dσ
dove pF = pressione alla frontiera
Si assume, per convenzione, che il lavoro sia
• positivo: lavoro compiuto dal sistema termodinamico
sull’ambiente
• negativo: lavoro compiuto dall’ambiente sul sistema termodinamico
241
Termodinamica
Si ha quando dσ si sposta di dl:
δL = dF · dl = pF dσ dlcosθ
dove θ è l’angolo tra dl e la normale uscente da dσ
Per ottenere il lavoro totale per uno spostamento infinitesimo
di tutta la frontiera si ha:
Z
δL =
pF dσ dlcosθ
Σ
Graficamente:
Notiamo che dσ (dlcosθ) è il volume del cilindroide di base dσ
e altezza dlcosθ descritto da dσ nel suo spostamento.
Se pF = costante si ha inoltre
Z
δL = pF
dσ dlcosθ = pF dV
Σ
242
Termodinamica
dove dV =variazione del volume di tutto il sistema
Se poi pF = p si ha:
δL = p dV
Questa relazione vale solo per trasformazioni reversibili in quanto bisogna conoscere il percorso della trasformazione per calcolare il lavoro .
Il lavoro non è una funzione di stato e se abbiamo una
trasformazione reversibile da A a B il lavoro é:
Z B
LA→B =
p dV
A
Esempio
Calcolo del lavoro in una trasformazione politropica. Calcolo
del lavoro esterno compiuto da un gas lungo una trasformazione reversibile
pV x = cost
dove x= numero (reale) della trasformazione politropica
Z B
Z B
cost
LA→B =
p dV =
dV
x
A
A V
Poiché pAVAx = pB VBx = cost per x 6= 1 si ottiene
LAB =
pB V B − p A V A
1−x
mentre per x = 1
LAB
VB
= pAVA ln
VA
243
Termodinamica
Se siamo nella condizione di gas ideale pV = nRT si ha curva
isoterma e:
VB
LAB = nRT ln
VA
Nel caso x = 0 si ha pV 0 = p = cost curva isobara
LAB = pA(VB − VA)
Nel caso x → ∞ si ha p1/xV = p0V = V = cost curva
isocora
LAB = 0
Una rappresentazione grafica del lavoro è la seguente:
Nella figura centrale
LABC = 2P0V0
LADC = P0V0
3
LAC = P0V0
2
244
Termodinamica
Unità di misura del lavoro
RB
Dalla equazione LA→B = A p dV si può definire l’unità litro
× atmosfera (l atm).
Poiché 1 atm = 1.01 105 P a e 1 l = 10−3 m3 si calcola nel
sistema S.I.
l atm = 1.01 105 · 10−3 = 1.01 102 N m = 101 Joule
Mulinello di Joule
Descriviamo la seguente esperienza ideata da J.P. Joule
Si dissipa il lavoro meccanico L durante la discesa facendo
aumentare la temperatura.
Si fa tornare il sistema alla temperatura iniziale sottraendo il
calore Q al sistema.
245
Termodinamica
Si osserva che nella trasformazione chiusa effettuata:
L
= J costante
Q
Più in generale si osserva che in tutte le trasformazioni chiuse
che scambiano solo L e Q, J è costante.
Si può ad esempio introdurre calore ed estrarre lavoro da un
sistema termodinamico e ritornare nello stesso stato termodinamico.
Quindi Lavoro e Calore sono due modi di trasferire energia.
Imponendo che il rapporto L/Q = 1 si ottiene
1 cal = 4.186 Joule
Esiste anche la caloria termochimica pari a 4,1840 Joule
Primo principio della termodinamica (nelle trasformazioni chiuse)
Nelle trasformazioni chiuse risulta
Q=L
(13.4)
Cioè un sistema può assorbire calore dall’ambiente e trasformarlo integralmente in Lavoro.
In generale si ha:
Q = Q1 − Q2
Dove:
• Q = Calore netto entrato nel sistema
246
Termodinamica
• Q1= Calore entrato nel sistema
• Q2= Calore uscito dal sistema
Si definisce il rendimento (η) come
η=
L
Q1
che si può scrivere come
Q2
<1
η =1−
Q1
L’uguaglianza (13.4) esprime il 1◦ principio della termodinamica per trasformazioni chiuse. Questo implica che:
a non è possibile produrre lavoro senza assorbire calore
b il rendimento η di una macchina termica è sempre < 1
Il 1◦ P.T. non è altro che il principio di conservazione dell’energia applicato a un sistema termodinamico.
Primo principio della termodinamica
Si constata sperimentalmente e si dimostra che la quantità
(Q − L) scambiata da un sistema in una trasformazione A →
B non dipende dalla particolare trasformazione ma dagli stati
A e B.
247
Termodinamica
Dalla (13.4) si ha:
• (Q − L)1 + (Q − L)2 = 0
trasf.ciclo 1-2
• (Q − L)1 + (Q − L)3 = 0
trasf.ciclo 1-3
sottraendo si ottiene:
(Q − L)2 − (Q − L)3 = 0
ovvero (Q − L)2 = (Q − L)3 cioé la quantità (Q − L) non
dipende dal percorso ma solo dagli estremi A e B. Sarà quindi:
(Q − L) = U (A, B)
Si ha dunque che U = U (A, B) é una funzione di stato detta
energia interna termodinamica Si ha di conseguenza che Q−
L = ∆U ovvero
Q = ∆U + L
(13.5)
1◦ principio della termodinamica (1◦ PT)
dove ∆U = UB − UA
248
Termodinamica
La variazione di energia interna di un sistema è uguale alla
differenza tra il calore assorbito (energia termica) e il lavoro
esterno (energia meccanica) compiuto dal sistema. Cioè il 1◦
P.T. non è altro che il principio di conservazione dell’energia
esteso ai sistemi termodinamici. In forma differenziale si ha:
dU + δL = δQ
Da notare che dU può essere espressa in questo modo solo per
stati di equilibrio e che δL e δQ dipendono dalla trasformazione. La U è la somma dell’energia cinetica dovuta ai moti
caotici delle particelle del sistema più l’energia potenziale delle
forze interne.
Energia interna di un gas
Per ogni sistema termodinamico caratterizzato dalle variabili x e y si ha una definizione univoca dell’energia interna.
U = U (P, T ) = U (V, T ) Nei gas rarefatti si ha un’equazione
matematica molto semplice che vedremo più avanti.
Espansione libera di un gas perfetto (rarefatto)
Analizziamo l’espansione libera di un gas rarefatto con l’esperimento di Joule.
249
Termodinamica
• Gas in A1
• Gas espanso tramite d anche in A2
Cioè nell’espansione libera se il gas è rarefatto non si osserva
trasmissione di calore al calorimetro. L’espansione libera:
• è un processo irreversibile
• il lavoro esterno L è nullo (δL = 0)
• δQ = 0 (tramite misura del calorimetro)
Per il 1◦P. T. si ha ∆U = 0 quindi se T = cost la U non varia,
cioé:
U = U (T )
Applicazioni del 1◦ P.T. ad un gas perfetto
Dal 1◦ P. T.: δQ = dU + p dV
Se poniamo dV = 0 (trasformazione isocora) si ha:
(δQ)V =cost = dU
250
Termodinamica
che possiamo scrivere come (dividendo per n dT ):
1 δQ
1 dU
cv =
=
n dT V
n dT V
dove cv =calore specifico molare
ovvero:
dU = ncv dT
Integrando tale espressione con cv = cost si ottiene:
U = ncv T + U0
Per i gas monoatomici si ha (se rarefatti):
3
cv = R
2
Per i gas biatomici si ha (se rarefatti):
5
cv = R
2
Relazione di Mayer:
Esprimendo la massa in moli i calori specifici si possono esprimere come calori molari cp e cv . Li lega la seguente relazione
di Mayer
cp = cv + R
Dimostrazione: Si ha:
1 dU + p dV
1 δQ
cp =
=
n dT p=cost n
dT
p
(13.6)
251
Termodinamica
poiché p dV + V dp = nR dT , essendo dp = 0 si ha p dV =
nR dT
inoltre dU = ncv dT
sostituendo nella (13.6) risulta:
1 ncv dT + nR dT
cp =
= cv + R
n
dT
p
Gas perfetto
Riassumendo si ha con buona approssimazione per i gas rarefatti:
• pV = nRT
• U = ncv T
• cv = 32 R per i gas monoatomici
• cv = 52 R per i gas biatomici
• cp = cv + R
Trasformazione isoterma reversibile
poiché
pV = cost
U = nCvT = cost
Si ha
Z
Q = ∆U + L = L =
2
Z
V2
p dV = nRT
1
V1
V2
dV
= nRT ln
V
V1
252
Termodinamica
Trasformazione adiabatica reversibile (Equazioni
di Poisson)
Per definizione δQ = 0
Le relazioni tra le variabili di stato risultano essere:
• prima equazione di Poisson:
pV γ = cost
• seconda equazione di Poisson:
T V γ−1 = cost
• terza equazione di Poisson:
p1−γ T γ = cost
dove
cp
γ=
cv
quindi
• γ = 53 R per gas monoatomico
• γ = 75 R per gas biatomico
Diagramma delle trasformazioni nel piano
di Clapeyron
trasformazione isoterma: da pV = K si ha
∂P
K
P
=− 2=−
∂V T
V
V
253
Termodinamica
trasformazione adiabatica: da pV γ = K si ha
∂P
P
K
= −γ γ+1 = −γ
∂V adiab
V
V
poiché γ > 1 la pendenza della curva adiabatica è maggiore
dell’isoterma. Graficamente si ha:
Calore specifico di una politropica Λ di
equazione pV x = K
Si ha dalla definizione di calore specifico molare
1 δQ
cΛ =
n dT
Nel caso di gas perfetto e di trasformazione reversibile si trova
che:
R
cΛ = cv +
1−x
che riassume i seguenti casi:
• x = 1 (isoterma)
cΛ = ∞
254
Termodinamica
• x = 0 (isobara)
cΛ = cp = cv + R
• x = ±∞ (isocora)
cΛ = cv
• x=
cp
cv
= γ (adiabatica)
cΛ = cv +
R
=0
cv +R
1 − cv
Entropia del gas perfetto
Si discuterà ampiamente più avanti che l’entropia S è una
funzione di stato. La sua definizione é:
Z B
δQrev
δQrev
dS =
⇒ ∆S = SB − SA =
T
T
A
dove δQ è la quantità infinitesima di calore scambiata dal
sistema durante la trasformazione reversibile.
Integrando nel caso di gas perfetto si trova che:
V
T
pV γ
S = ncv ln
+
S
=
nR
ln
+
nc
ln
+ S0
0
v
γ
p0 V 0
V0
T0
dove p0 e V0 sono i valori di uno stato termodinamico arbitrariamente scelto ed S0 è il valore dell’entropia scelto arbitrariamente per questo stato.
Le conseguenze della relazione di S sono:
255
Termodinamica
• per una trasformazione adiabatica reversibile e con pV γ =
cost si ha S = cost
• l’entropia risulta una variabile estensiva coniugata alla temperatura, in una trasformazione reversibile poiché
δQrev = T dS
Nel piano T S (piano di Gibbs) si ha:
Cioè il calore scambiato in una trasformazione reversibile da
uno stato A ad uno stato B é:
Z B
Qrev =
T dS
A
risulta quindi coincidente con l’area sottesa dalla curva A →
B.
Ciclo di Carnot per un gas perfetto
Si tratta di un ciclo reversibile (trasformazione chiusa) limitata
da due isoterme e da due adiabatiche. Si suppone di avere:
• trasformazioni reversibili
256
Termodinamica
• gas ideale
Nel ciclo
L = Q1 − Q2 = T1∆S1 − T2∆S2 = (T1 − T2)∆S1 =
= (T1 − T2)(S2 − S1)
Calcoliamo il rendimento del ciclo di Carnot
η=
L
Q1 − Q2 T1 ∆S − T2 ∆S T1 − T2
T2
=
=
=
=1−
Q1
Q1
T1 ∆S
T1
T1
In realtà vedremo che questa espressione è valida anche per gas
non perfetto. Il rendimento η dipende solo dalle temperature
Termodinamica
257
delle isoterme ed é indipendente dalle sostanze e dalle aree
delle trasformazioni. Vedremo che il ciclo di Carnot è quello
dotato del massimo rendimento tra tutti quelli operanti tra T1
e T2 .
Macchine termiche
Tutto il lavoro può essere convertito in calore
Esempio: si sfregano due pietre sott’acqua e si ottiene una
completa trasformazione di lavoro in calore (L = Q) ed il
rendimento sarà del 100%
La trasformazione del calore in lavoro si può fare con:
• trasformazioni non cicliche
Esempio: Espansione isoterma di un gas, con ∆U = 0 e
Q = L ma p diminuisce e la trasformazione finisce.
• trasformazione cicliche
Il sistema viene riportato allo stato iniziale. Il dispositivo che fa compiere al sistema la trasformazione ciclica
si chiama macchina termica o motore termico. Cioè il
sistema è la sostanza che lavora e la macchina lavora su
un ciclo. Essa compie lavoro verso l’esterno eseguendo
sempre lo stesso ciclo.
258
Termodinamica
ηABLM = ηACHM = ηACDGM = ηAEF M
perché si tratta di cicli di Carnot che operano tra le stesse
isoterme
Lo schema di principio di una macchina termica é:
si ha L = QH − QC dove L =lavoro netto eseguito dalla
macchina per ogni ciclo
Il rendimento é:
Lnetto QH − QC
QC
η=
=
=1−
QH
QH
QH
per avere η = 1 (efficienza 100%) occorre che QC = 0 che
risulta impossibile per il 2◦ P. T. come vedremo in seguito.
Termodinamica
259
Tipi di macchine termiche:
• macchine a combustione esterna
– macchina di Stirling
– macchina a vapore
• macchine a combustione interna
– motore a benzina (ciclo Otto)
– motore Diesel (ciclo Diesel)
Macchina di Stirling
Nel 1816 Stirling progettò una macchina che bruciando benzina eseguiva del lavoro. Il ciclo è costituito da 4 fasi:
260
Termodinamica
dove R =rigeneratore. E’ di bassa conducibilità termica
Si ha L = QH − QC > 0
261
Termodinamica
Macchine frigorifere
Oltre alle macchine termiche, che trasformano calore in lavoro,
esistono anche le macchine frigorifere. Queste ultime hanno lo
scopo di raffreddare un corpo. In pratica una macchina termica fatta funzionare, nel piano di Clapeyron, in senso antiorario
risulta essere una macchina frigorifera. Cioé si ha:
Una macchina termica può essere schematizzata:
T
H
Q
H
L
M
Q
C
T
C
L’obiettivo è il lavoro che produce mentre il costo è QH è
quindi naturale definire il rendimento η = QL . Invece un
H
frigorifero può essere schematizzato nel seguente modo:
262
Termodinamica
T
H
Q
H
L
F
Q
C
T
C
l’obiettivo è prelevare QC dall’ambiente (l’interno del frigorifero) il calore a bassa temperatura mentre il costo è L (energia
elettrica consumata) quindi si deve definire il coefficiente di
prestazione f (fattore di qualità):
f=
QC
QC
=
L
QH − QC
Il fattore di qualità può risultare maggiore di 1. Non è opportuno chiamarlo rendimento frigorifero.
La relazione tra il rendimento ed il fattore di qualità risulta:
Q2
η =1−
Q1
Q1
quindi Q
=
2
ma poiché
1
1−η
f=
si ottiene:
Q2
Q2
1−η
=
=
L
Q1 − Q2
η
1
η=
1+f
Termodinamica
263
1
Dalla relazione η = 1+f
o quella inversa f = 1−η
η si può concludere che un ciclo termico che abbia un alto rendimento,
funzionando come frigorifero ha un fattore di qualità molto
basso.
In pratica vorrebbe dire che il cilo di Carnot funzionante da
macchina termica va bene mentre funzionante da frigorifero
sarebbe da scartare. E’ chiaro che queste conclusioni non possono essere accettate. Infatti anche se altri cicli danno un f
più alto, non garantiscono a differenza del ciclo di Carnot una
temperatura veramente bassa e costante e quindi solo con il
ciclo di Carnot siamo sicuri di aver all’interno del frigorifero
quella determinata temperatura.
Il frigorifero di Stirling
Supponiamo di percorrere in senso inverso il ciclo della macchina di Stirling. Si avrà l’assorbimento di calore a bassa temperatura e la cessione di una quantità di calore più grande ad
alta T e l’esecuzione di lavoro sul sistema.
Questo dispositivo si chiama frigorifero o macchina frigorifera
mentre la sostanza si chiama refrigerante
Analizziamo come esempio il frigorifero di Stirling.
264
Termodinamica
• 1 → 2 compressione isoterma a TH , QH ceduto a TH
• 2 → 3 isocora, ceduto QR
• 3 → 4 espansione isoterma a TC , QC assorbito a TC
• 4 → 1 isocora, assorbito QR
Risultato: QC assorbito a TC , QH ceduto a TH , L = QC −
QH < 0
Viene trasferito calore dal serbatoio più freddo a quello più
caldo con l’impiego di lavoro meccanico.
Il diagramma p − V é:
Termodinamica
265
Secondo principio della termodinamica
Si verifica che non è possibile convertire completamente in
lavoro il calore assorbito da un solo serbatoio; sempre una certa
quantità di calore viene ceduta a un serbatoio a temperatura
più bassa. Si ha l’enunciato di Kelvin-Plank del secondo
principio:
E’ impossibile realizzare una trasformazione termodinamica il
cui unico risultato sia quello di assorbire calore da un serbatoio
caldo e convertirlo completamente in lavoro.
Se non fosse vero si potrebbe, ad esempio, far muovere una nave estraendo calore dall’oceano senza violare il 1◦ P. T. Infatti
il 1◦ P. T. non vieta di trasformare completamente il calore in
lavoro.
Il 1◦ P. T. nega la possibilità di creare o distruggere energia.
Il 2◦ P. T. nega la possibilità di impiegare l’energia in certi
modi.
266
Termodinamica
Il moto perpetuo di prima specie, cioé il funzionamento continuo di una macchina che crea energia, non è possibile per il
1◦ P. T.
Mentre il moto perpetuo di seconda specie, cioé il funzionamento di una macchina che scambia calore con un unico
serbatoio, non è possibile per il 2◦ P. T.
Le macchine termiche hanno sempre bisogno per funzionare di
scambiare calore almeno con due sorgenti a diversa temperatura.
Si preleva Q1 alla T maggiore, se ne trasforma una parte in
lavoro e si cede il resto Q2 alla T minore. Si ha:
η=
Q1 − Q2
Q1
Si ha l’enunciato Clausius del 2◦ P.T.:
E’ impossibile realizzare una trasformazione il cui unico risultato sia quello di far passare calore da un corpo freddo ad uno
caldo.
L’enunciato di Clausius affronta in maniera diretta il problema
dell’irreversibilità come legge di natura.
Non è mai stato osservato, ad esempio, che un cubetto in un
bicchiere d’acqua aumenti di massa scaldando l’acqua rimasta
(reazione possibile per il 1◦ P. T.).
I due enunciati sono equivalenti poiché la violazione dell’uno
implica la violazione dell’altro.
• Falso Kelvin → falso Clausius
267
Termodinamica
T1
Q'
1
Q
1
L
M
F
Q
2
T
2
Si ha L = Q1 e Q01 = L + Q2
– T1 assorbe complessivamente Q2
– T2 cede Q2
• Falso Clausius → falso Kelvin
T1
Q
2
L
M
F
Q
2
T
Q
1
Q
2
2
Si ha L = Q1 − Q2
T2 non ha scambi di calore
Infatti se fosse possibile trasformare Q → L da una sorgente
T (violando l’enunciato di Kelvin) con l’attrito prodotto da
268
Termodinamica
L si potrebbe dare Q a una sorgente T 0 > T violando però
Clausius.
Viceversa se non fosse verificato Clausius si potrebbe da una
macchina termica riportare il calore data alla sorgente a bassa
T e riportarlo alla TH ottenendo una completa trasformazione
Q → L cioé violando Kelvin.
Il Teorema di Carnot
Il postulato di Kelvin-Plank impedisce che le macchine termiche abbiano rendimento unitario. Il teorema di Carnot afferma:
1. tutti i cicli di Carnot operanti tra le stesse temperature
estreme hanno lo stesso rendimento indipendentemente:
• dalle caratteristiche della macchina
• dal fluido che compie il ciclo
2. qualsiasi ciclo, reversibile o no, ha rendimento non superiore al ciclo di Carnot tra le stesse due temperature
estreme del ciclo in questione (T1 e T2).
Dimostriamo 1)
269
Termodinamica
dove
• A = macchina di Carnot reversibile
• B = macchina qualsiasi(reversibile o no)
Si fa si che |Q1,A| = |Q1,B | e si ottiene:
Ltotale = LB − LA = ηB Q1,B − ηAQ1,A = Q1,A(ηB − ηA)
Per il II◦ P. T. si ha che deve essere LT ≤ 0 quindi ηB ≤ ηA.
Se: B è reversibile si possono scambiare i ruoli e quindi:
ηB = ηA
η è stato calcolato precedentemente nel caso ideale che ora
vale in generale
T2
ηCarnot = 1 −
T1
Dimostriamo 2):
Un ciclo qualsiasi si può approssimare con una serie di cicli di
Carnot fra T10 < T1 ed T20 > T2 .
270
Termodinamica
I rendimenti dei cicli di Carnot sono:
0
ηCarnot
T2
T20
=1− 0 ≤1−
T1
T1
L’intero ciclo ha rendimento globale inferiore a quello di una
macchina di Carnot operante solo tra le temperature estreme
T1 e T2
Temperatura termodinamica assoluta
Il rendimento di un ciclo di Carnot reversibile dipende solo dalle temperature dei termostati. Questa proprietà viene
sfruttata per definire la scala di temperatura assoluta.
Supponiamo di caratterizzare la temperatura dello stato x con
il valore numerico Θ(x) nel seguente modo:
si fissa un ciclo di Carnot tra lo stato x e lo stato di riferimento
R. Il rendimento é:
Qx
ηC (R, x) = 1 −
QR
271
Termodinamica
ovvero
Qx
= 1 − ηC (R, x)
QR
Si assume che Θ(x) sia il valore di una funzione monotona di
ηC (R, x) o QQx . Cioè:
R
Qx
Θx
=
QR Θ R
Si assume R come punto triplo dell’acqua con il risultato
Θx = 273.16
Qx
= 273.16 (1 − ηC (R, x))
QR
definita temperatura termodinamica assoluta
La misura della temperatura si riduce alla misura dei calori
scambiati in un ciclo di Carnot reversibile fra R e X.
Quindi la misura di una temperatura si trasforma in una misura di calori scambiati.
Tanto più Qx è più piccolo tanto Θx è piccola.
Il valore minore di Qx è zero la Θx (temperatura) è lo zero
272
Termodinamica
assoluto.
Si userà il simbolo T per indicare la temperatura assoluta e si
misurerà con il grado kelvin (K).
Altra definizione di zero assoluto:
Lo zero assoluto è la temperatura alla quale una trasformazione reversibile isotermica è anche adiabatica
Teorema o disuguaglianza di Clausius
Per un ciclo di Carnot reversibile si ha:
T 2 Q2
=
T 1 Q1
quando si esprimono Q come valori assoluti con le convenzioni
dei segni si ha:
Q2
Q1 Q2
T2
=−
⇒
+
=0
T1
Q1
T1
T2
Ricordando che un qualsiasi ciclo reversibile è approsimabile
ad una successsione di N cicli di Carnot ed è identico a ∞
cicli di Carnot.
lim
N →∞
N X
Q1
k=1
T1
+
Q2
T2
I
=
REV
δQ
=0
T
Nel caso si abbia un ciclo irreversibile si dimostra che si ha:
I
δQ
<0
T
273
Termodinamica
nel caso più generale di un qualsiasi ciclo reversibile o irreversibile si può scrivere:
I
δQ
≤0
T
questa espressione costituisce il teorema di Clausius dove il segno di uguaglianza vale per i cicli reversibili e il segno minore
vale per i cicli irreversibili.
Il teorema di Clausius si può enunciare nel seguente modo: In
un ciclo termodinamico reversibile (o irreversibile) la somma
dei rapporti tra le quantità di calore infinitesime (dQ) scambiate dal sistema durante il ciclo con le sorgenti a temperatura
T e le temperature stesse è nulla (o negativa).
Nel caso di un numero finito di sorgenti si può scrivere
n
X
Qi
i=0
Ti
≤0
Questa disuguaglianza denominata disuguaglianza di Clausius indica che: In un ciclo termodinamico reversibile (od
irreversibile) la somma dei rapporti tra δQ e le temperature
T è nulla (o negativa).
La disuguaglianza di Clausius si può applicare per determinare se una trasformazione è reversibile o no.
Esempio: una sostanza alla temperatura T1 trasmette calore
ad una sostanza T2 (T2 < T1) ed entrambe sono dentro ad un
contenitore adiatermano. Per il primo corpo è −Q/T2 mentre
per il secondo è Q/T1. la somma è
−Q Q
1
1
+
= −Q
−
<0
T2
T1
T2 T1
274
Termodinamica
quindi il passaggio di calore tra due corpi è un processo irreversibile.
è possibile ogni ciclo?
Per determinare se un ciclo termodinamico è realizzabile bisogna confrontare il suo rendimento con un ciclo di Carnot
operante tra le due temperature estreme ma anche verificare
la disuguaglianza di Clausius:
Esempio: un ciclo ha Q1 = 600 J,Q2 = −450 J, Q3 = 200 J
e T1 = 600 K, T2 = 400 K, T3 = 300 K. Il rendimento é:
L
350
η=
=
= 0.43
Qass 800
il rendimento del ciclo di Carnot é:
TM IN
300
ηC = 1 −
=1−
= 0.5
TM AX
600
P
Il ciclo sembra possibile ma si ha i Qi/Ti = 0.54 per cui è
in contrasto con la condizione di Clausius e quindi non è un
ciclo possibile.
Entropia
Se consideriamo nel piano di Clapeyron un generico ciclo reversibile come quello mostrato
275
Termodinamica
Dal teorema di Clausius si ha
I
Z B
Z A
δQ
δQ
δQ
=
+
=0
T
T
T
A (I)
B (II)
che possiamo anche scrivere come:
Z B
Z B
δQ
δQ
−
=0
A (I) T
A (II) T
Quindi:
Z
B
δQ
=
T
A (I)
Z
B
δQ
A (II) T
Per cui l’integrale è indipendente dal percorso seguito quindi sarà una funzione di stato. Questa grandezza è stata
chiamata da Clausius ENTROPIA ed indicata con il simbolo
S.
La variazione di essa tra uno stato A ed uno stato B lungo
una trasformazione reversibile é:
Z B δQ
∆S = SB − SA =
T REV
A
276
Termodinamica
mentre la variazione infinitesima di entropia durante una trasformazione reversibile é:
δQREV
dS =
T
Cosı̀ come è stata definita l’entropia è sempre determinata a
meno di una costante arbitraria generalmente però si è interessati a variazioni di entropia ed non ai suoi valori assoluti.
Si può dimostrare che:
Z B Z B δQ
δQ
>
SB − SA =
T
T IRREV
A
A
REV
Cioè la variazione
R B δQ di entropia è maggiore dell’integrale di Clausius I = A T per una trasformazione irreversibile.
Per calcolare la variazione di entropia tra lo stato A e B si
può sempre sfruttare la sua proprietà di essere una funzione di
stato e quindi scegliere una qualsiasi trasformazione reversibile
tra i due stati.
Questo non vuol dire, come vedremo più avanti, che la variazione dell’entropia dell’ambiente sia la stessa se la trasformazione
tra A e B è stata reversibile od irreversibile.
Calcolo dell’entropia per un gas perfetto
Dal 1◦ P. T. per un gas perfetto si ha:
Z B
Z B
δQREV
dU + p dV
SB − SA =
=
=
T
T
A
A
Z B
Z B
ncv
p dV
=
dT +
T
T
A
A
277
Termodinamica
da cui:
Z
B
SB − SA = ncv
A
dT
+ nR
T
Z
B
A
dV
V
per cui
TB
VB
SB − SA = ncv ln
+ nR ln
TA
VA
questa formula generale assume diverse forme a seconda delle
trasformazioni:
1. Trasformazione isotermica (TA = TB )
pA
VB
= nR ln
∆S = nR ln
VA
pB
2. Trasformazione isobarica essendo VVB =
A
la relazione di Mayer si ottiene
TB
TA
ed utilizzando
VB
TB
∆S = ncp ln
= ncp ln
VA
TA
3. Trasformazione isocora (VA = VB )
TB
pB
= ncV ln
∆S = ncV ln
TA
pA
4. Trasformazione adiabatica (dQ = 0) avrà ∆S = 0
Le trasformazioni adiabatiche reversibili vengono definite isoentropiche.
278
Termodinamica
Variazione di entropia di generiche trasformazioni
Nel caso di una generica trasformazione si ha:
∆Q = mc dT
come conseguenza
Z
B
∆S = m
c(T )
A
dT
T
nel caso che c si possa considerare costante questa diventa
Z B
dT
TB
∆S = mc
= mc ln
TA
A T
Se durante la trasformazione si ha un cambiamento di stato,
che come noto avviene a T costante si ha:
δQ = λ dm
e come conseguenza
mλ
∆S =
T
Entropia dell’Universo
L’equazione generale esprimente la variazione di entropia di
un sistema termodinamico é:
Z
B
SB − SA ≥
A
δQ
T
279
Termodinamica
dove il segno di uguale vale per trasformazioni reversibili e
quello di maggiore per trasformazioni irreversibili.
Se si ha una trasformazione reversibile le quantità δQ rappresentano le quantità infinitesime di calore entrate nel sistema
ma siccome le stesse quantità di calore, cambiate di segno,
sono uscite dalla sorgente di temperatura alla temperatura T
si determina una variazione totale di entropia del sistema più
l’ambiente esterno uguale zero.
Mentre se il sistema è isolato, essendo δQ = O, si ha:
SB − SA ≥ 0
Cioè l’entropia di un sistema isolato aumenta sempre o resta
costante.
Se definiamo il sistema isolato come universo termodinamico
(u) l’insieme del sistema termodinamico (s) e dell’ambiente
esterno (a) e teniamo conto che le trasformazioni naturali sono
tutte irreversibili si ha in questo caso:
SB − SA > 0
Cioè si ottiene l’affermazione di Clausius ”l’entropia dell’universo è in continuo aumento”
Questa affermazione si può assumere come definizione del 2◦
P. T.
Un’enunciato più significativo del 2◦ P.T. noto anche come
”legge di accrescimento dell’entropia” è il seguente:
Ogni processo naturale si svolge necessariamente in quel verso
che comporta un’aumento di entropia dell’universo.
Il fatto che l’entropia dell’universo debba continuamente au-
280
Termodinamica
mentare non significa che in una certa trasformazione la variazione di entropia non possa essere negativa; se essa diminuisce
la variazione di entropia dell’ambiente esterno sarà sicuramente positiva e con un valore assoluto maggiore della diminuzione
di entropia della trasformazione.
In modo analitico avremo:
• ∆Su = ∆Ss + ∆Sa = 0 trasformazione reversibili
• ∆Su = ∆Ss + ∆Sa > 0 trasformazione irreversibili
• ∆Su = ∆Sa = ∆Ss = 0, cicli reversibili
• ∆Su = ∆Sa > 0 cicli irreversibili
Entropia e processi naturali
Analizziamo in questo paragrafo l’evoluzione spontanea dei
sistemi utilizzando la legge dell’accrescimento dell’entropia.
Supponiamo ad esempio di mescolare due quantità di acqua
che per semplicità prendiamo identiche (massa = m) poste
rispettivamente alle temperature T1 e T2 con T1 > T2. La
temperatura finale sarà
Tf =
T1 + T2
2
Se il mescolamento avviene con una trasformazione reversibile
ad esempio portando le due masse a contatto con una successione infinita di termostati posti tra le temperature T1 e T2, si
281
Termodinamica
trova:
Tf
T1
Tf
∆S2 = mc ln
T2
∆S1 = mc ln
Mentre la variazione di entropia totale sarà:
Tf
Tf
+ ln
=
T1
T2
Tf2
(T1 + T2)2
= mc ln
>0
= mc ln
T1T2
4T1T2
∆S = ∆S1 + ∆S2 = mc ln
Come si può facilmente verificare, è ∆S > 0, mentre le singole
variazioni di entropia sono ∆S1 < 0, ∆S2 > 0
è importante notare che se il mescolamento fosse avvenuto in
modo irreversibile la variazione di entropia ∆S1 sarebbe stata
la medesima perché essa è una funzione di stato e quindi non
dipende dalla trasformazione seguita.
Se invece consideriamo la variazione di entropia dell’ambiente
esterno troviamo che nel caso della trasformazione reversibile
la variazione di entropia dei termostati è uguale e contraria a
quella del sistema per cui la variazione di entropia dell’universo sarà nulla.
Mentre nel caso della trasformazione irreversibile (mescolamento naturale) siccome le due masse di acqua non sono a
contatto con l’ambiente la variazione di entropia dell’universo
coinciderà con quella del sistema; quindi sarà positiva.
282
Termodinamica
Entropia ed energia inutilizzabile
Consideriamo:
• sistema = serbatoio a temperatura T
• ambiente = temperatura T0 dove T < T0
Se una macchina di Carnot lavora tra le due temperature assorbendo Q dall’ambiente si avrà una parziale conversione in
lavoro:
T0
L=Q 1−
T
Quindi solo una parte dell’energia Q è utilizzabile per essere convertita in lavoro Se Q è trasmesso tra T1 → T2 con
T2 < T1 ma sempre T2 > T0 cioé il sistema a T2 è immerso
nell’ambiente a T0; si ha:
• lavoro max. prima della trasmissione
T0
L=Q 1−
T1
• lavoro max. dopo la trasmissione
T0
L=Q 1−
T2
La differenza tra i due L è l’energia E 0 che avrebbe potuto
essere convertita in lavoro prima della trasmissione di calore.
Si ha:
T0
T0
Q
Q
E0 = Q 1 −
−Q 1−
= T0
−
T1
T2
T2 T1
283
Termodinamica
cioé:
E 0 = T0∆Stot
(13.7)
Questo per una trasformazione in calore.
Si può dimostrare che in ogni trasformazione irreversibile si ha
la (13.7)
L’energia non più utilizzabile per compiere lavoro in seguito a
una trasformazione irreversibile è T0 volte la variazione totale
di entropia del sistema e dell’ambiente circostante dovuta a
una trasformazione irreversibile.
Ovviamente per il 1◦ P. T. l’energia non è ”persa”.
Terzo principio della termodinamica
Si è visto che l’entropia è sempre definita a meno di una
costante di integrazione del tipo
Z A
δQREV
SA = S0 +
T
0
ci si pone il problema di trovare uno stato di un sistema di
riferimento ad entropia nulla
Poichè si ha un legame diretto tra entropia e disordine e poichè
per T → 0 si ottengono sistemi sempre più ordinati si ha
Z TA
δQREV
SA =
T
0
dove TA è la temperatura dello stato A
Questa assunzione (S0 = 0) costituisce l’enunciato di F.F.Simon
(1927) del terzo principio della termodinamica:
284
Termodinamica
L’entropia di ogni sistema allo zero assoluto può essere
supposta nulla
Elementi di teoria cinetica dei gas
Introduzione
La termodinamica considera solo variabili macroscopiche (pressione, volume, temperatura...).
La meccanica statistica si occupa degli stessi sistemi ma presuppone l’esistenza di atomi ed applica le leggi della meccanica
ai singoli atomi, però utilizzando leggi statistiche. Si vedrà che
si potranno collegare le funzioni termodinamiche con le medie
di proprietà atomiche.
Al livello della teoria cinetica dei gas si usano tecniche di calcolo dei valori medi molto semplici; con la meccanica statistica
si usano tecniche più formali ed astratte.
Con la meccanica statistica quantistica si usano le tecniche di
calcolo della statistica applicata alla meccanica dei quanti.
Si suppone che il gas da studiare sia il gas perfetto già definito.
Equazione di stato pV = nRT
Utilizziamo il modello del gas perfetto per giustificare l’equazione di stato pV = nRT .
Si interpreta la pressione sulle pareti come il risultato degli
urti molecole → parete.
Si otterrà che la pressione è proporzionale alla densità del gas,
dipende dalla massa m e dalla velocità delle molecole.
Termodinamica
285
Paragonando il risultato con l’equazione detta si ottiene l’interpretazione microscopica della temperatura.
Trascureremo gli urti tra le particelle ma poiché essi sarebbero
elastici non darebbero contributo.
Inoltre il tempo speso durante gli urti è trascurabile rispetto
al tempo tra gli urti.
Calcolo cinetico della pressione
Consideriamo il gas in una scatola cubica:
Se la molecola colpisce la faccia A1 si ha
∆P = Pf − Pi = −mvx − (mvx) = −2mvx
dove ∆P ⊥A1. Poiché si conserva la P totale la quantità di
moto comunicata ad A1 è P = 2mvx. Se m non urta altre
molecole ed arriva alla faccia opposta A2 il tempo trascorso
sarà l/vx. Per tornare in A1 ci vorrà il tempo 2l/vx.
286
Termodinamica
Il numero di collisioni per unità di tempo è vx/2l. la quantità
di moto che si trasmette ad A1 per unità di tempo é:
∆P
Vx mvx2
= 2mvx =
∆t
2l
l
La forza totale su A1 è la quantità di moto per unità di tempo
(F = ∆P/∆T ). La pressione sarà F/Area, cioé pressione:
m
p = 3 (vx21 + vx22 + vx23 + . . .)
l
Se N è il numero totale di molecole del recipiente ed N0 il
numero per unità di volume, si ha l3 = V = N/N0, quindi
vx21 + vx22 + vx23 + . . .
p = mN0
N
si definisce velocità quadratica media
r
vx21 + vx22 + vx23 + . . .
vqmx =
N
la (13.8) diventa
2
p = mN0vqm
x
(13.8)
(13.9)
2
2
2
per ragioni statistiche si ha vqm
=
v
=
v
, ma dal
qm
qm
x
y
z
momento che
2
2
2
2
+
v
vqm
= vqm
+
v
qm
qm
z
x
y
si ha
2
2
vqm
= 3vqm
x
Sostituendo nella (13.9) si ha
1
2
p = mN0vqm
3
(13.10)
287
Termodinamica
che si può anche scrivere come
1 2
p = ρvqm
3
espressione della pressione esercitata sulle pareti
dalla (13.11) si ricava
r
3p
vqm =
ρ
(13.11)
(13.12)
Poichè ρ = mN/V si ottiene per la (13.11)
1 mN 2
vqm
3 V
siccome N = NAn ed inoltre k = R/NA si ottiene
p=
(13.13)
nR
k
sostituendo nella (13.13) si ottiene
N=
2
1 nR vqm
p= m
3 k V
oppure
nR 1 2
mvqm
pV =
k 3
dalla pV = nRT si ricava
1 2
3
mv = kT
2 qm 2
Cioè la temperatura assoluta è proporzionale al valore medio
dell’energia cinetica. L’energia cinetica associata al moto ha
effetto sulla temperatura.
288
Termodinamica
Processo di diffusione
2
Siccome 21 mvqm
= 32 kT si ha che per i due gas alla stessa
temperatura il rapporto tra le velocità quadratiche medie delle
molecole è uguale alla radice quadrata del rapporto inverso
delle loro masse. Cioè
2
2
2 m1vqm,1
2 m2vqm,2
T =
=
3k
2
3k
2
si ottiene:
vqm,1
=
vqm,2
s
v̄12
v̄22
r
=
m2
m1
Se i gas sono in un recipiente con pareti porose il gas più
leggero sfuggirà più rapidamente. Si trova che il rapporto tra
ilqnumero di molecole che escono dalle pareti nel tempo ∆t è
m2
m1 . Questo processo di diffusione è usato come mezzo di
separazione dell’U 235(fissile) dall’U 238 (non fissile).
Velocità del suono
Poiché vsuono = vqm si ha che la velocità del suono V1 alla
temperatura T1 é legata alla velocità V2 alla temperatura T2
dalla relazione
r
v1
T1
=
v2
T2
Esempio: vs = 332 m/s a 0◦C (273 K) la sua velocità a 300 K
è in aria:
r
300
V300K =
332 = 348 m/s
273
289
Termodinamica
Esempio: calcolare la vqm della molecola di Idrogeno a O ◦C
e p = 1 atm.
Risoluzione: ρ = 8.99 10−2Kg/m3 e p = 1atm = 1013 105N/m2
r
vqm =
3p
= 1840m/s
ρ
Distribuzione delle velocità molecolari
Abbiamo definito vqm ma le effettive velocità delle molecole si
possono discostare anche di molto da questo valore.
Clerk Maxwell nel 1859 per primo risolse il problema di trovare
la distribuzione più probabile di velocità.
La densità di probabilità di Maxwell è:
m 3/2 mv2
y(v) = 4π
e− 2πkT v 2
2πkT
dove y(v) dv è la probabilità che una molecola alla temperatura T abbia velocità comprese tra v e v + dv. Se vogliamo
calcolare la probabilità che a temperatura costante la velocità
della molecola sia compresa tra v1 e v2 dobbiamo integrare tra
i due valori
Z v2
y12 =
y(v) dv
v1
la forma della distribuzione di Maxwell è :
290
Termodinamica
da correggere
Si è supposto di avere N = 1016 molecole e quindi si è disegnato
N (v) = N y(v)
quindi N (v) dv è il numero di molecole tra v e v + dv. Sarà:
Z ∞
N=
N (v) dv = 1016
0
Si ottiene la velocità più probabile
r
2kT
vp = vmoda =
= 0.81 vqm
m
vp è il valore della velocità di cui è dotato il maggior numero
di molecole
inoltre la media aritmetica delle velocità detta velocità media
è:
Z ∞
8
vmedia = v̄ =
v y(v) dv = vqm
3π
0
291
Termodinamica
quindi risulta essere:
vp < vmedia < vqm
Verifica sperimentale della distribuzione di Maxwell
Maxwell ricavò la sua funzione nel 1859 e nel 1920 Stern ne
dimostrò sperimentalmente la sostanziale correttezza ma solo
nel 1955 si giunse ad una precisa verifica sperimentale.
Stern adottò il seguente selettore di velocità
la durata del percorso tra i due dischi è ∆t = l/v
Una particella che passa nel disco 1 passerà anche nel disco 2
se:
l
α
=
v ω
quindi v =
lω
α
292
Termodinamica
Energia interna e calori molari secondo la teoria
cinetica
L’energia interna è l’energia totale meccanica del sistema U =
EK + Ep
Nel caso del gas monoatomico schematizzato come un insieme
di punti:
1 2
1 2
U = EK + Ep = N mv̄ = nNA mv̄
2
2
ma poiché 21 mv̄ 2 = 32 kT si ottiene
3
3
3
U = n NAkT = N kT = nRT
2
2
2
quindi
3
Umol = kT
2
Da cui si ottiene il calore molare a volume costante δQ =
dU + p dV
cal
1 dU 3
cV =
= R≈3
n dT
2
mole K
Per gas biatomici supposti rigidi come distanza ci sarà sempre:
U = EK,totale = EK,rot + EK,traslazionale
Il teorema di Boltzamm dell’equipartizione dell’energia cinetica afferma che ogni grado di libertà della molecola ha associata
l’energia media 21 kT .
Nel caso della molecola monoatomica ci sono tre gradi di libertà (3 coordinate indipendenti). L’energia cinetica media è
293
Termodinamica
3 21 kT = 32 KT come visto. Per gas biatomici si hanno 5 gradi
di libertà (3 coordinate per il C. M. + 2 angoli) e si ha:
Umol = EK,totale = EK,rot + EK,traslazionale =
1
1
5
= 2 kT + 3 kT = kT
2
2
2
per n moli U = 52 nRT e di conseguenza il calore molare a
volume costante risulta:
cV =
1 dU 5
= R
n dT
2
Se consideriamo molecole biatomiche elastiche si ha un moto
armonico semplice tra i due atomi ed in media EP = EK =
1
2 kT più un grado di libertà.
Umol
1
1
7
= EK,totale + EP = 6 kT + kT = kT
2
2
2
Si ottiene per molecole poliatomiche rigide (6 gradi di libertà)
U = 3nRT
e
cV = 3R