ALMA MATER STUDIORUM – UNIVERSITÀ DI BOLOGNA
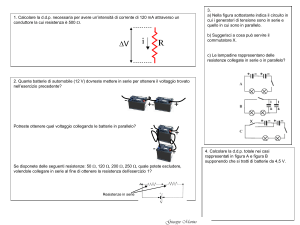
FACOLTÀ DI INGEGNERIA
corso di laurea in
INGEGNERIA MECCANICA
Laboratorio di CAD
STUDIO DI FATTIBILITÀ SULLA
REALIZZAZIONE DI UN SISTEMA DI
PROPULSIONE IBRIDO
Candidato:
Luca Rizzi
Relatore:
Prof. Ing. Luca Piancastelli
Consumi mondiali di petrolio
AUMENTANO :
• COSTO PETROLIO
• COSTO BENZINA, GASOLIO …
• INQUINAMENTO
NECESSARIE SOLUZIONI INNOVATIVE
PRESENTE
• Combustibili alternativi :
FUTURO
• Celle a combustibile - idrogeno
Metano, Gpl
• Aumento efficienza MCI :
Common rail, multijet, multiair
• Downsizing
Presenti ancora difficoltà
tecniche e costi molto
elevati
FUTURO PROSSIMO
MOTORE A
COMBUSTIONE INTERNA
Vantaggi :
PROPULSIONE IBRIDA
+
MOTORE ELETTRICO
Svantaggi :
• MCI funzionante a punto fisso
• Maggiori costi d’acquisto
• Recupero energia in frenata
• Sofisticata gestione del sistema
• Funzionamento in modalità
• Eventuale aumento peso e
solo elettrica (emissioni zero)
ingombro
• Meccanismo idle-off
• Autonomia solo elettrica limitata
IL PROGETTO
• Abbinare al motore turbodiesel Fiat 1.9 Jtd un motore elettrico brushless
• Il motore elettrico sostituisce il motorino di avviamento dal punto di vista
fisico e funzionale
• Scelta delle batterie per l’alimentazione del motore elettrico
• Stima dell’autonomia in modalità solo elettrica
• Utilizzo di supercapacitori per il recupero dell’energia in frenata
• Ideazione di tre possibili configurazioni dell’autovettura
OBIETTIVI
• Soluzione economica per la realizzazione di una configurazione ibrida
• Ottenere una autonomia soddisfacente in modalità solo elettrica e quindi
ridurre consumi di carburante ed emissioni nocive dell’autovettura
• Salvaguardare la vita delle batterie tramite l’utilizzo di supercapacitori
per gli spunti di potenza
• Rendere compatibili i nuovi componenti con ingombri e pesi di una
normale autovettura
MOTORE ELETTRICO
La scelta ricade sui motori brushless (senza contatti striscianti):
• Alta efficienza
• Possibilità di funzionare sia da
motore che da generatore
• Scarsa produzione di calore
• Alto rapporto potenza/dimensioni
Scelto il top di gamma della Hacker motors : Hacker A-200
Potenza max
15000 W
Tensione
alimentazione
42 V
Peso
2590 g
Diametro
109 mm
BATTERIE
Le batterie più prestazionali sono gli accumulatori Li-Po (litio-polimero):
Vantaggi :
• Sono l’evoluzione delle batterie agli ioni di litio (Li-ion)
• Polimero non infiammabile
Maggiore sicurezza
• Densità energetica 20% maggiore delle Li-ion e 3 volte le Ni-Mh
• Non hanno effetto memoria
• Elevate correnti di scarica
Svantaggi :
• Costi elevati
• Non possono essere completamente scaricate per evitare danneggiamenti
SCELTA BATTERIE
Il motore Hacker può essere alimentato con 12 celle Li-Po (12 S)
Tensione singola cella = 3,7 V
Tensione totale = 44,4 V
Vengono prodotte batterie con un certo numero di celle (2S, 3S, 4S, 6S…)
Si può scegliere la configurazione più adatta per raggiungere le 12 celle necessarie
Per ridurre al minimo i cablaggi si sceglie la configurazione con due batterie da 6S
Scelta modello in base a:
• Capacità batteria
• Rapporto capacità/peso
Capacità
Scelta batteria
Hyperion G3 VX – 35-65 C
Dimensioni
Peso
Corrente di
scarica
Nom
6500 mAh
160x47x70,8 mm
1011 g
Max
228 A 423 A
STIMA DEL CONSUMO ELETTRICO
Utilizzo di un modello matematico per determinare la forza resistente (FR)
FR = P ∙ ( r0 + i ) + ( k ∙ P + b ) ∙ v2
• P = peso
• r0 = resistenza al rotolamento degli pneumatici
• i = tangente alla pendenza ( consideriamo i = 0)
• k = coefficiente di aumento resistenza rotolamento pneumatici
• b = coefficiente di resistenza aerodinamica
• v = velocità
Moto a velocità costante
Forza motrice = Forza resistente
Moto uniformemente accelerato
FM = ( m ∙ a ) + F R
FM ∙ v = Potenza motrice
Energia = Potenza ∙ ∆t
Script elaborati con il programma di calcolo Matlab 7
STIMA DEL CONSUMO ELETTRICO
Dati su accelerazioni, velocità e distanze teoriche percorse ricavati
dalla normativa europea
CICLO URBANO
CICLO EXTRAURBANO
STIMA DEL CONSUMO ELETTRICO
Si ottengono così i consumi energetici in Watt-ora (Wh)
Dividendo il consumo energetico per la tensione di alimentazione del
motore elettrico ( 42 V ) si ottiene il consumo in Ampere-ora (Ah)
Distanza percorsa
Consumo per chilometro
Consumo per
Totale consumo
Distanza
(Ah)
percorsa (km)
Urbano
10,040
4,068
2,468
Extraurbano
11,514
6,956
1,655
Ciclo
chilometro
(Ah/km)
DIMENSIONAMENTO PACCO BATTERIE
Dimensiono prendendo come riferimento il consumo del ciclo urbano
• Consumo per chilometro = 2,468 Ah/km
• Capacità batterie = 6,5 Ah
• Coefficiente di sicurezza k = 0,8
Batterie esaurite per
chilometro
Numero batterie per km = Consumo per km / ( Capacità batteria ∙ k )
0,47 batterie per chilometro consumate
Autonomia voluta ≈ 60 km
42 V di alimentazione
Numero batterie in
parallelo ≈ 30
2 batterie in serie
POSIZIONAMENTO PACCO BATTERIE
DEFINITIVO
Per motivi di sicurezza si è scelto di posizionare le batterie dietro al divano
posteriore, luogo protetto in caso di incidente.
Necessito di una configurazione delle batterie che tolga poco spazio al vano
bagagli
Dimensioni batteria: 160x47x70,8 mm
• 2 batterie per il lato da 47 mm
• 16 batterie per il lato da 70,8 mm
• 2 batterie per il lato da 160 mm
TOTALE 64 BATTERIE
• Spessore ≈ 10 cm
• Larghezza ≈ 115 cm
• Altezza ≈ 33 cm
POSIZIONAMENTO PACCO BATTERIE
DEFINITIVO
32 batterie in parallelo
2 file in serie
32 / 0,47 = 68 km di
autonomia in modalità
solo elettrica
Peso pacco batterie
64 batterie ∙ 1,011 kg = 65 kg
RISULTATI OTTIMI
SUPERCAPACITORI
Sono condensatori elettrochimici a doppio strato
Immagazzinano energia elettrica polarizzando una soluzione elettrolitica
Elettrodi porosi : superfici di 2000 m2 per grammo
• Funzionamento efficiente e
reversibile
• Range di utilizzo tra -40°C e +65°C
• Capacità rimane sostanzialmente
costante ad ogni temperatura
SUPERCAPACITORI
Perché utilizzarli a fianco delle batterie:
• Efficienza di carica/scarica molto elevata
• Complementari alle batterie in quanto
sono ottimi per fornire picchi di potenza
per brevi periodi di tempo
• Efficiente recupero dell’energia cinetica
in frenata
• Risparmiano stress alle batterie
prolungandone la durata e riducendone il
numero complessivo
• Cicli di vita (carica/scarica) elevati
• Buon funzionamento anche a
temperature estreme
SUPERCAPACITORI
Modello di applicazione
Fonte primaria :
• MCI
• Batterie
• Fuel-cell
Supercapacitori
• Picchi di potenza
• Recupero energia
Richieste
medie di
potenza
DIMENSIONAMENTO SUPERCAPACITORI
Scelta tra i supercapacitori della Maxwell Technologies
Dimensionamento per recuperare l’energia cinetica di una frenata da 50 km/h
Decelerazione media = 9 m/s2
Tempo frenata = 1,5 s
Potenza motore elettrico = 15000 W
Rendimento da generatore ( η ) = 0,8
Energia ( E ) = Potenza ∙ tFRENATA ∙ η = 18000 J
Maxwell serie BCAP
Voltaggio nominale cella = 2,7 V
Voltaggio max sistema = 44,4 V
Numero celle in serie = V max / voltaggio cella = 17
DIMENSIONAMENTO SUPERCAPACITORI
Voltaggio nominale Hacker (VN) = 42 V
Corrente funzionamento ( I ) = E / ( tFRENATA ∙ VN ) = 285,7 A
Tempo rilascio energia ( tR ) = 2,5
Costante di tempo supercapacitore ( RC ) = 0,7
∆V = 5 V ( valore di primo tentativo )
Capacità sistema (CSIST) = I ∙ ( tR ∙ RC ) / ∆V ≈ 182 F
CSIST = Capacità cella ∙ # celle parallelo / # celle serie
# celle parallelo = 1
# celle serie = 17
Capacità cella = CSIST ∙ # celle serie ≈ 3100 F
DIMENSIONAMENTO SUPERCAPACITORI
Il supercapacitore con la capacità più
elevata è il BCAP3000 P270 con una
capacità di 3000 F
Rieseguendo i calcoli si ottiene:
Capacità sistema = 176,5 F
∆V = 5,2 V
Pacco da 17 supercapacitori da
abbinare a ciascun motore elettrico
installato
Peso ≈ 9 kg
Dimensioni ≈ 37x19x14 cm
VALORI ACCETTABILI
CONFIGURAZIONI DELL’AUTOVETTURA
Sostituzione del motorino di avviamento con il motore elettrico Hacker
Configurazione classica:
• Motorino avviamento
accoppiato al volano della
frizione
• Frizione tra volano e
cambio
• Disinnesto pignone
motorino una avviato il MCI
CONFIGURAZIONI DELL’AUTOVETTURA
Sostituzione del motorino di avviamento con il motore elettrico Hacker
Configurazione ideata:
• Inversione di frizione e
volano
• Motore elettrico sempre
accoppiato al volano
• Adozione di un cambio
robotizzato (tipo selespeed)
per non dover utilizzare una
seconda frizione tra volano e
cambio
CONFIGURAZIONI DELL’AUTOVETTURA
Condizioni di funzionamento
Avviamento :
• Frizione innestata
• Cambio in folle
Propulsione solo elettrica : • Frizione disinnestata
• Ruote trasmettono il moto dal motore elettrico
• Cambi di marcia garantiti dal cambio robotizzato
Propulsione con MCI :
• Frizione innestata
• Ruote trasmettono il moto dal MCI
• Motore elettrico funziona da generatore
trascinato dal MCI
CONFIGURAZIONI DELL’AUTOVETTURA
Stima rapporto riduzione per l’avviamento
Motorino avviamento : 3 kW a 300 giri al minuto del volano
Motore Hacker : caratteristica di potenza lineare
3 kW a 1590 rpm
Rapporto riduzione ( i ) = 1590 / 300 = 5,3
Applicando una condizione di non interferenza
ottengo il numero minimo di denti del pignone
Per ottenere valori interi che abbiano i = 5,3 scelgo
Adottando un modulo di 2,5 mm
ottengo i diametri primitivi
d1 = 50 mm
d2 = 265 mm
z1’ = 15,8
z1 = 20
z2 = 106
VALORI
ACCETTABILI
PRIMA CONFIGURAZIONE
1 Motore Hacker accoppiato al volano
1 Pacco supercapacitori posto nel vano motore
1 Controller ed inverter
PRIMA CONFIGURAZIONE
Motore Fiat 1.9 JTD
Accoppiamento Hacker - volano frizione
SECONDA CONFIGURAZIONE
2 Motori Hacker accoppiati al volano
2 Pacchi di supercapacitori posti nel vano motore
2 Controller ed inverter
Il pacco batterie complessivo è il medesimo
SECONDA CONFIGURAZIONE
I due motori elettrici possono
essere entrambe installati sul
volano della frizione
Ognuno sarà alimentato in
modo autonomo dall’altro,
ma il pacco batterie rimane
invariato
TERZA CONFIGURAZIONE
2 Motori Hacker : uno accoppiato al volano, l’altro agente
sull’asse posteriore
2 Pacchi di supercapacitori : uno posizionato nel vano motore,
l’altro nel vano della ruota di scorta o contiguo alle batterie
TERZA CONFIGURAZIONE
Ulteriore gruppo cambiodifferenziale per ottenere
una configurazione a 4 ruote
motrici
I motori elettrici sono
sempre alimentati in modo
autonomo
PRESTAZIONI
Calcolo dell’accelerazione 0 – 50 km/h
Utilizzo del modello di resistenza aerodinamica presentato in precedenza
PRIMA
CONFIGURAZIONE
POTENZA 15 kW
0 – 50 km/h in 14,4 s
tempo
(s)
SECONDA e TERZA
CONFIGURAZIONE
POTENZA 30 kW
Velocità (km/h)
0 – 50 km/h in 6,5 s
CONCLUSIONI
• La realizzazione del sistema di propulsione ideata partendo da una base
già esistente è fattibile e potrebbe essere una soluzione economica
• Il sistema ibrido realizzato diesel - elettrico è innovativo e realizzabile
senza troppo modifiche e permette di risparmiare l’installazione di alcuni
componenti come l’alternatore
• Per la produzione in serie dovrebbe comunque essere realizzato un
motore elettrico ad hoc che possa arrivare a 20000 rpm : il motore Hacker
presenterebbe problemi di sovravelocità se trascinato dal MCI a causa del
rapporto di riduzione tra motore elettrico e albero motore
• Si è raggiunto un buon valore di 60 km di autonomia del veicolo in
modalità solo elettrica
• Pesi dei componenti aggiunti contenuti : 80 – 90 kg
• Buone prestazioni soprattutto per la versione da 30 kW
GRAZIE PER L’ATTENZIONE