Capitolo 5
Metodologie di progetto di
amplificatori di potenza
5.1
Introduzione
Le tecniche di progettazione degli amplificatori di potenza a microonde possono essere
sostanzialmente suddivise in due categorie:
- approcci sperimentali
- simulazioni circuitali
Alla prima categoria appartengono i metodi basati sulle misure dirette del dispositivo attivo, denominati tecniche di Load/Source Pull; ovviamente, sono i metodi più
affidabili ed accurati, ma hanno lo svantaggio non trascurabile di richiedere un apposito banco di misura e la disponibilità fisica del dispositivo stesso (aspetto non del tutto
secondario).
Qualora non fosse possibile eseguire questo tipo di misure, si ricorre all’uso di
simulatori non lineari, in cui il dispositivo attivo è rappresentato mediante un modello
non lineare il più efficace ed accurato possibile. Ovviamente, tale approccio sarà meno
affidabile del precedente ed ovviamente dipenderà dalla accuratezza del modello stesso
utilizzato.
In questo secondo caso, è inoltre spesso conveniente fare ricorso a delle metodologie semplificate, basate sulla drastica riduzione della complessità delle caratteristiche
86
Metodologie di progetto di amplificatori di potenza
I-V d’uscita del dispositivo attivo (linearizzazione), al fine di stimare con sufficiente
approssimazione le prestazioni dei dispositivi di potenza in condizioni di funzionamento lineari. Inoltre, permettono di ottenere una versione preliminare del progetto,
ovvero un buon punto di partenza da cui poi procedere tramite ottimizzazioni (manuali
o automatiche). Tra quelle metodologie, la più diffusa e la più nota è quella proposta
da Cripps nel lontano 1983, che permette di stimare i contorni a potenza costante (load
pull power contours) del dispositivo attivo operante in Classe A.
Utilizzando approcci semplificati simili, è possibile stimare le prestazioni di potenza del dispositivo attivo anche per altre classi di polarizzazione. Tali metodi semplificati sono semplici e veloci, ma a causa della loro intrinseca approssimazione producono solo dei risultati indicativi delle prestazioni ottenibili e necessitano di una successiva fase di raffinamento mediante l’impiego di simulazioni circuitali con modelli
più realistici.
5.2
Tecnica del Load/Source Pull
La tecnica del Load/Source Pull è una tecnica sperimentale che permette di determinare i valori delle impedenze di carico, sia di ingresso che di uscita, che soddisfano
le specifiche di progetto richieste (potenza d’uscita, efficienza, intermodulazione, etc.).
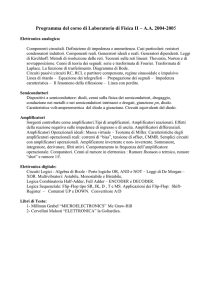
Viene eseguita sperimentalmente su un apposito banco di misura, che può essere in
parte automatizzato. Lo schema a blocchi semplificato del banco di misura è riportato
in figura 5.1.
Figura 5.1: Schema semplificato di un banco di load/source pull.
Le reti di polarizzazione, sia in ingresso sia in uscita, con le relative capacità di
87
Metodologie di progetto di amplificatori di potenza
blocco per la continua, vengono indicati come BiasT; i Tuner viceversa rappresentano
delle reti di adattamento variabile (manualmente o in forma controllata da calcolatore).
In fig. 5.2 è riportato uno schema analogo reale di un banco di load/source pull.
(a)
(b)
Figura 5.2: Banco di misura per la tecnica del load/source pull: schema a blocchi (a) e
foto (b).
Si consideri ad esempio il caso in cui, fissata la polarizzazione e la potenza d’ingresso Pin , si vogliano determinare i carichi Zin e Zload affinché sia fornita al carico
d’uscita (fissato pari a 50Ω) la massima potenza disponibile in uscita Pout .
È allora abbastanza intuitivo considerare in ingresso un carico Zin in modo da
realizzare la condizione di adattamento coniugato, garantendo così il massimo trasferimento di potenza dal generatore esterno al dispositivo attivo. Così facendo, resta da
determinare il solo carico d’uscita Zload che massimizzi Pout . Indicando con ΓL il
relativo coefficiente di riflessione di Zload , si determinano su carta di Smith le curve
di livello Pout ottenute al variare di tale ΓL (insieme dei valori di carico ΓL per cui
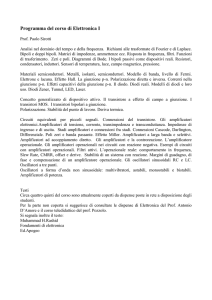
Pout assume uno stesso valore). Tali curve sono molto simili a delle ellissi, ed in fig.
5.3 sono riportati degli esempi di misure di potenze d’uscita e di efficienze aggiunte di
conversione (PAE) rispettivamente per 1dB e 2dB di compressione.
Tali curve si ottengono variando il coefficiente di riflessione del carico ΓL mediante il Tuner in uscita dello schema di fig. 5.1, riadattando opportunamente mediante
il Tuner in ingresso e misurando il livello della potenza sul carico in uscita tramite un
Power meter; il tutto avviene al livello di compressione prefissato.
E’ poi possibile ripetere questo tipo di misura al variare della potenza del segnale di
ingresso Pin e della polarizzazione, ottenendo in tal modo una serie di carte di progetto
88
Metodologie di progetto di amplificatori di potenza
(a)
(b)
Figura 5.3: Esempi di misure di load pull: (a) curve di Pout per 1dB di compressione;
(b) curve di PAE a 2dB di compressione.
molto utili per la progettazione dell’amplificatore di potenza.
5.3
Esempi di utilizzo del Load Pull per la realizzazione di
carte di progetto
Si supponga di aver fissato la polarizzazione e di considerare un’impedenza Zin tale da
soddisfare la condizione di adattamento coniugato in ingresso. Un buon compromesso
tra massima potenza di uscita Pout in condizioni lineari ed elevata efficienza aggiunta
ηadd si ha nel punto ad 1 dB di compressione. Consideriamo allora il problema della
determinazione del valore del carico Zload in corrispondenza del quale il punto 1dBGc
presenta il valore massimo possibile per Pout (il valore di Pin sarà determinato di
conseguenza); indicheremo con Zopt tale valore del carico.
In fig. 5.4 è riportato a titolo di esempio l’andamento della potenza d’uscita in
funzione della potenza di ingresso, ottenuta al variare di Zload .
Per quanto riguarda la determinazione del carico Zload , occorre adottare una pro(1)
cedura di tipo iterativo, come mostrato graficamente in fig. 5.5. Fissato il carico Zload ,
(1)
si determina il carico di adattamento di ingresso Zin e si esegue un’analisi per Pin
variabile, fino a determinare il punto Q1 corrispondente al punto 1dBGc, e quindi il
(1)
valore Pin . Si varia poi il carico Zload fino ad ottenere il valore massimo di Pout ,
89
Metodologie di progetto di amplificatori di potenza
Figura 5.4: Andamento di Pout in funzione di Pin al variare del carico Zload .
Figura 5.5:
Rappresentazione grafica del funzionamento dell’algoritmo per la
determinazine di Zopt .
90
Metodologie di progetto di amplificatori di potenza
(2)
(2)
determinando così Zload . Si riadatta in ingresso (determinando Zin ) e si ripete l’anal(2)
isi per Pin variabile, determinando il punto Q1 a 1dBGc ed il relativo valore Pin . Si
procede in questo modo fino a quando il procedimento non converge. In genere sono
necessarie poche iterazioni per determinare il carico ottimo, anche se per ognuno di
essi può essere richiesto un tempo elevato di esecuzione.
Un altro esempio di impiego della tecnica di Load Pull è quello della realizzazione
di carte di progetto relative alle misure di intermodulazione. Infatti, per ogni dispositivo attivo, il valore del carico che minimizza l’intermodulazione differisce da quello
che massimizza la potenza di uscita o il guadagno; è quindi necessario trovare un
compromesso in base alle specifiche su Pout e C/I richieste.
Delle carte di progetto molto utili in tale situazione possono essere ottenute determinando i valori dei carichi a cui corrisponde Pout o C/I costante, mediante una
tecnica di misura simile a quella del load pull, ricorrendo ad uno schema a blocchi del
tipo riportato in figura 5.6.
Figura 5.6: Schema a blocchi per misure di Pout e C/I al variare del carico.
Ancora una volta, supporremo che il punto di polarizzazione del dispositivo sia
fissato e che la Zin sia scelta in modo da adattare in forma coniugata l’ingresso.
L’intermodulazione è misurata applicando in ingresso al dispositivo due segnali
(toni) puri di uguale ampiezza, a frequenze f1 e f2 , separate fra loro di pochi MHz.
Il segnale di uscita conterrà allora queste due portanti amplificate, più tutti i segnali
indesiderati di cui si è parlato in precedenza, tra cui il prodotto di intermodulazione da
esaminare, misurabile mediante un analizzatore di spettro. Si eseguono allora delle
misure che consentono di individuare i contorni relativi a Pout e C/I costanti, al
variare di Zload , ottenendo delle curve del tipo riportato in figura 5.7.
Ciascuno dei contorni chiusi rappresenta i valori dell’impedenza di carico Zload
corrispondenti ad un valore costante della potenza di uscita Pout ; il valore del carico
91
Metodologie di progetto di amplificatori di potenza
Figura 5.7: Esempio di curve di livello per Pout costante e per C/I costante.
che determina il massimo della potenza di uscita per un particolare insieme di condizioni operative, quali potenza di ingresso, frequenza e punto di polarizzazione, è
similmente ottenibile. I contorni aperti rappresentano invece i valori dell’impedenza di
carico Zload che determinano uno stesso valore dell’intermodulazione C/I, misurata
in base alla equazione
C/I3
Pout f1
=
Pout 2f1 − f2
(5.1)
Come si può vedere dalla figura 5.7, il carico ottimo è individuato dai punti di tangenza tra i contorni di C/I ed i contorni di Pout . Tali punti di tangenza definiscono
una curva ottima, come riportato nella stessa figura, i cui punti possono essere rappresentati in funzione di una ascissa curvilinea ρ. Quanto detto vale per una Pin fissata;
ripetendo le misure per diversi valori di Pin , si ottengono altri contorni e quindi altre
curve ottime distinte tra loro. È possibile allora costruire un grafico in cui si riportano in ascisse i valori dell’ascissa curvilinea ρ ed in ordinata i valori di Pout e C/I,
ottenendo delle curve parametriche in Pin , simili a quelle riportate nella figura 5.8.
Ripetendo il procedimento al variare della polarizzazione e/o della frequenza, è
possibile ottenere delle carte di progetto mediante le quali determinare il carico che
consente di soddisfare le specifiche. Per esempio, fissato come specifica di progetto
92
Metodologie di progetto di amplificatori di potenza
Figura 5.8: Andamento di Pin e C/I in funzione della impedenza di carico.
il valore di C/I, sul grafico in fig. 5.8 si traccia una retta orizzontale relativa a tale
valore desiderato, come mostrato in figura 5.9
Tale retta intersecherà le curve C/I, parametriche in Pin , in punti differenti, indicati come 1, 2 e 3 in fig. 5.9. In corrispondenza a tali punti si determinano, sulle curve
di Pout , i punti 1’, 2’ e 3’; la curva che unisce tali punti, rappresenta approssimativamente i valori di Pout in funzione di ρ e di Pin per il valore fissato di C/I. Si sceglie
infine il punto di massimo di tale curva, che definisce univocamente il valore di ρopt e
di Pin,opt . In base a quest’ultimo valore si determina il valore di GL,opt .
In maniera analoga, se è il livello di Pout ad essere fissato dalle specifiche, si ricorre
alla fig. 5.10.
In corrispondenza ai punti 1, 2, e 3 si determinano i punti 1’, 2’ e 3’ che uniti
individuano una curva; il punto di massimo di tale curva rappresenta il massimo valore
di C/I per un valore fissato di Pout , pertanto è preso come punto di ottimo. Tale punto
ancora una volta definisce univocamente i valori di ρopt e Pin,opt e quindi GL,opt .
93
Metodologie di progetto di amplificatori di potenza
Figura 5.9: Esempio di massimizzazione di Pout per C/I fissato.
Figura 5.10: Esempio di massimizzazione di C/I per Pout fissato.
94
Metodologie di progetto di amplificatori di potenza
5.4
Approccio alla progettazione mediante l’impiego di simulatori commerciali
Oltre alla metodologia di progetto basata sulle misure di load pull effettuate sul dispositivo attivo, che ovviamente prevedono sia la disponibilità fisica di quest’ultimo che un
apposito banco di misura, una diversa possibilità consiste nel far ricorso, quando possibile, all’uso di simulatori non lineari. In questo secondo caso sono possibili diverse
soluzioni, a condizione ovviamente di avere a disposizione un modello non lineare del
dispositivo attivo. In fig. 5.11 è riportato un esempio di implementazione nel simulatore commerciale HP-MDS di un modello non lineare per un MESFET di potenza
prodotto della Alenia Marconi Systems.
(a)
(b)
Figura 5.11: Esempio di implementazione nel simulatore commerciale HP-MDS di un
dispositivo di potenza a MESFET prodotto dalla Alenia Marconi Systems: (a) circuito;
(b) equazioni.
Una volta implementato il modello non lineare, mediante analisi di tipo harmonic
balance è possibile simulare la metodologia del load pull; un esempio di schema circuitale utilizzato per tale scopo è riportato in fig. 5.12, insieme ad i risultati ottenuti
sul modello precedentemente descritto.
Ovviamente, tale procedura è molto laboriosa e quindi scarsamente utilizzata,
a causa sia delle innumerevoli simulazioni necessarie, e quindi dello sforzo com95
Metodologie di progetto di amplificatori di potenza
(a)
(b)
Figura 5.12: Esempio di load pull simulato al calcolatore: (a) schema circuitale
utilizzato; (b) risultati ottenuti.
putazionale, sia al fatto che per ogni valore del carico d’uscita è necessario riadattare il
circuito d’ingresso, di nuovo con un aggravio dal punto di vista del tempo di calcolo.
L’altra possibilità allora consiste nel far ricorso all’impiego di ottimizzatori, in
genere disponibili con il simulatore stesso, definendo appropriate funzioni obiettivo.
Tali approcci però sono sicuramente efficaci qualora si abbia ha disposizione un buon
punto di partenza; viceversa, possono incorrere in problemi di convergenza o in minimi
locali.
Per ottenere allora un progetto di base da raffinare eventualmente con l’uso degli
ottimizzatori, si possono sfruttare i criteri derivanti dalle metodologie semplificate, che
saranno analizzate nei prossimi paragrafi.
5.5
Metodologia di Cripps
E’ una metodologia semplificata per calcolare con buona approssimazione i contorni
a potenza d’uscita costante di un dispositivo attivo di potenza operante in Classe A in
condizioni lineari. L’approccio è sostanzialmente basato su una linearizzazione delle
caratteristiche di uscita, come riportato in fig. 5.13.
Tale semplificazione consiste nel supporre che il dispositivo attivo agisca come
un generatore di corrente ideale, linearmente dipendente dalla tensione d’ingresso (di
gate) tramite una transconduttanza gm assunta costante, come riportato in fig. 5.13.
96
Metodologie di progetto di amplificatori di potenza
(a)
Figura 5.13:
(b)
Caratteristica d’uscita linearizzata (a) e modello equivalente (b)
considerati nella metodologia di Cripps.
Assumendo che la corrente d’uscita id (t) sia esprimibile nella forma
id t = ip cos ωt
(5.2)
la tensione prodotta in un’impedenza di carico
Z = R + jX = Z · ejθ
(5.3)
vds t = Z · ip cos ωt + θ
(5.4)
sarà data da
mentre la potenza istantanea dissipata nel carico sarà
p t = id t · vds t = i2p Z · cos ωt + θ cos ωt
(5.5)
Integrando tale potenza su un periodo, si ottiene l’espressione della potenza d’uscita
1
1 Prf = i2p Z · cos θ = ip vp cos θ
2
2
(5.6)
vp = ip Z (5.7)
avendo indicato con
Dall’equazione (5.6), si può facilmente dedurre che la potenza d’uscita è massima
per θ = 0, ovvero per un carico puramente resistivo. Sotto questa ipotesi infatti, la
quantità di potenza a radio frequenza erogata al carico dipende unicamente dal valore
di R. Indicando allora con VM e IM i limiti superiori di vp e ip , che con riferimento
alla fig. 5.13 e per un amplificatore in Classe A sono
IM =
Idss
2
VM = VDD − Vk
97
(5.8)
Metodologie di progetto di amplificatori di potenza
l’impedenza di carico ottima sarà
Zopt = Ropt + j0
con
Ropt =
VM
IM
(5.9)
In queste ipotesi, la curva di carico (definita come il luogo dei punti nel piano I-V che
descrivono il funzionamento dinamico del dispositivo attivo) diviene una retta, come
mostrato in fig. 5.14a.
(a)
(b)
Figura 5.14: Curva di carico ottima nel caso di carico puramente resistivo R = Ropt :
(a) θ = 0; (b) θ 6= 0.
Se viceversa l’impedenza di carico presenta anche una parte reattiva (cioè θ 6= 0),
allora la curva di carico che si ottiene diventa un’ellisse, come mostrato in fig. 5.14b.
Come è facilmente intuibile, la condizione R 6= Ropt può essere verificata solo
in casi molto particolari e per bande di funzionamento moderate. Per questa ragione
diventa interessante esaminare anche il caso in cui il carico è di tipo complesso e con
R 6= Ropt .
Nel caso di funzionamento in Classe A, la massima potenza di uscita nel caso
ottimo è
1
Popt = VM · IM =
2
Idss
1
= VDD − Vk ·
=
2
2
1 2
= Idss
Ropt =
8
2
1
= VDD − Vk Gopt =
2
98
(5.10)
Metodologie di progetto di amplificatori di potenza
dove
Gopt =
1
Ropt
(5.11)
Ovviamente, nel caso in cui si considerino altre classi di polarizzazione, i parametri
quali IM e VM andranno ridefiniti in modo opportuno.
Indicando con ZL l’impedenza del carico, si osserva che quando |ZL | < Ropt
allora il comportamento lineare è essenzialmente limitato dalla massima escursione
possibile della corrente, rappresentata da Idss (ovvero 2IM ); viceversa, quando |ZL | >
Ropt , allora il comportamento lineare è limitato dalla massima escursione possibile per
la tensione, rappresentata da 2(VDD − Vk ) (ovvero 2VM ). Analizziamo separatamente
i due casi.
ZL ≤ Ropt
In questo caso è facile effettuare l’analisi esprimendo l’impedenza di carico nella
forma
ZL = RL + jXL
(5.12)
In fig. 5.15 è rappresentata la curva di carico (ellittica) corrispondente a questo caso.
Figura 5.15: curva di carico nel caso |ZL | <opt .
In queste condizioni, il massimo valore di picco raggiungibile per id (t) rimane
ip = Idss /2 e la potenza di uscita lineare è data da
1
PL =
2
Idss
2
!2
RL
(5.13)
Come conseguenza si ha
PL
RL
=
Popt
Ropt
99
(5.14)
Metodologie di progetto di amplificatori di potenza
Per quanto riguarda la tensione vds (t), questa è data dalla eq. (5.4) ed il suo
massimo valore di picco VM è dato da
VM =
Idss
2
q
2 + X2 =
RL
L
VDD − Vk
Ropt
q
2 + X2
RL
L
(5.15)
Risulta allora evidente che affinché l’escursione della tensione sia minore o al limite uguale al suo massimo valore possibile, cioè VDD − Vk , la reattanza di carico XL
deve soddisfare la seguente condizione
2
2
XL2 ≤ Ropt
− RL
(5.16)
ZL ≥ Ropt
In questo caso è opportuno rappresentare il carico mediante la sua ammettenza
YL = GL + jBL
(5.17)
In fig. 5.16 è rappresentata la curva di carico (ellittica) corrispondente a questo caso.
Figura 5.16: curva di carico nel caso |ZL | > Ropt .
In tali condizioni, il massimo valore di picco raggiungibile per la tensione vds (t) è
VDD − V k e la potenza di uscita può essere espressa nella forma
!2
1
PL =
VDD − Vk GL
2
(5.18)
da cui
PL
GL
=
Popt
Gopt
Il massimo valore di picco della corrente id (t) è invece dato da
!
q
q
Idss
2
2
G2L + BL2
IM = VDD − Vk
GL + BL =
2Gopt
100
(5.19)
(5.20)
Metodologie di progetto di amplificatori di potenza
Allora, affinché tale valore sia inferiore a Idss /2, BL deve soddisfare la seguente
relazione
BL2 ≤ G2opt − G2L
(5.21)
Le considerazioni precedenti suggeriscono l’opportunità di utilizzare le equazioni
(5.14), (5.16), (5.19) e (5.21) al fine di costruire le curve a potenza costante su carta di
Smith.
Per i dettagli sul modo di costruire i contorni a potenza costante mediante la
metodologia di Cripps, si rimanda in appendice al capitolo.
5.6
Esempio di progetto mediante la metodologia di Cripps
Per dimostrare l’impiego della teoria di Cripps con un esempio pratico, viene presentato un esempio di progetto di un amplificatore nella banda 4.5-5.5GHz. Il dispositivo
utilizzato è un MESFET di media potenza della fonderia MMT (UK) e le simulazioni
sono state fatte mediante un simulatore commerciale (HP-MDS) utilizzando un modello ‘full non linear’ tipo Materka. Il circuito equivalente utilizzato per il dispositivo
attivo e le relative curve in continua, sono riportate in fig. 5.17.
(a)
(b)
Figura 5.17: Circuito equivalente del dispositivo attivo considerato (a) e caratteristiche
in continua (b).
Le tensioni di alimentazione scelte sono VD D = 5V e VG G = −0.5V (Classe A).
Dall’analisi delle caratteristiche, si determina il valore di Ropt = 21.9Ω. Si è poi
misurato il valore della capacità di uscita data da Cds = 0.3107pF .
In fig. 5.18 sono riportati i contorni a potenza costante mentre in fig. 5.19 è
101
Metodologie di progetto di amplificatori di potenza
riportata la rete di uscita sintetizzata ed il corrispondente andamento dell’impedenza
di carico sintetizzata
Figura 5.18: Simulazione delle curve a Pout costante.
(a)
(b)
Figura 5.19: Rete di adattamento d’uscita progettata (a) e relativo andamento della
impedenza vista ai capi di Id (b).
Come si nota, la rete di uscita sintetizza un coefficiente di riflessione che si mantiene
all’interno della curva di livello ad 1dB. E’ inoltre da osservare che considerando Cds
e Ld come elementi della rete esterna, l’impedenza ottima da sintetizzare è puramente
resistiva e quindi costante in frequenza, per cui la sintesi della rete di adattamento può
essere fatta usando un unico set di curve di livello (determinate in precedenza).
Infine, la rete di ingresso viene sintetizzata per soddisfare le condizioni di adat102
Metodologie di progetto di amplificatori di potenza
tamento complesso coniugato, ottenendo l’amplificatore riportato in fig. 5.20, le cui
prestazioni sono riportate in fig. 5.21.
Figura 5.20: Amplificatore di potenza realizzato con la metodologia di Cripps.
(a)
(b)
Figura 5.21: Parametri S dell’amplificatore realizzato mediante metodologia di Cripps:
(a) adattamento; (b) guadagno.
Come si può vedere, le prestazioni ottenute risultano in buon accordo con le previsioni di Cripps, ovvero il ripple del guadagno nella banda di interesse è di circa
1dB. Ovviamente, nella simulazione si è tenuto conto sia dei parassiti (trascurati o
semplificati da Cripps) sia del comportamento non lineare. Se necessario, è possibile
successivamente ottimizzare tale progetto di base per soddisfare con più accuratezza
le specifiche richieste.
103
Metodologie di progetto di amplificatori di potenza
5.7
Metodologia semplificata per amplificatori di tipo lineare
In un amplificatore di potenza, in condizioni di grande segnale, la corrente e la tensione
d’uscita non sono puramente sinusoidali, ma presentano un elevato contenuto armonico. La generazione di tali componenti armoniche è generalmente ascritta a fenomeni di
taglio (clipping) dovuti alla conduzione diretta della giunzione gate-canale, al pinchoff del canale stesso, al breakdown della giunzione gate-drain o al comportamento
ohmico nella regione di triodo (bassa tensione Vds ). La presenza di queste limitazioni
porta ad analizzare il dispositivo attivo mediante un modello equivalente semplificato
del tipo riportato in fig. 5.22, assumendo che possa essere rappresentato con un generatore di corrente controllato in tensione, caratterizzato da una transconduttanza gm
costante (oppure linearmente variabile con la tensione di pilotaggio).
(a)
(b)
Figura 5.22: Caratteristiche del dispositivo attivo nel caso di gm costante (a) o lineare
(b).
Nel caso si assuma un modello a gm costante, la corrente in uscita dal dispositivo
attivo può essere espressa in funzione dell’angolo di circolazione, che indichiamo con
φ, ovvero :
Id =
Im
1−cos
h
·
cos ϑ − cos
φ
φ
2
i
se |ϑ| < φ2 ,
2
0
(5.22)
altrimenti
dove Im rappresenta il massimo valore della corrente d’uscita e ϑ = ωt. L’angolo di
104
Metodologie di progetto di amplificatori di potenza
circolazione può essere espresso in funzione della corrente di polarizzazione Id,DC ,
ossia:
Id,DC
Id,DC − Im
φ = cos−1
!
(5.23)
In fig. 5.23 è riportato un esempio di Id per gm supposto costante.
Figura 5.23: Esempio di forma d’onda Id di tipo sinusoidale.
La tensione di uscita dipenderà invece dal tipo di terminazione armonica. Definiamo come Condizioni di Riferimento quelle per un amplificatore in classe A, in cui le
espressioni della resistenza di carico ottima, della potenza d’uscita a RF, della potenza
in continua dissipata e della efficienza di conversione sono date da:
RA = 2
Prf,A =
ηd,A =
Vds,DC − Vk
Im
2
Vds,DC
· 1 − αk
Prf,A
Pdc,A
Pdc,A =
Im · Vds,DC
2
2
2RA
1
= · 1 − αk
2
Pdiss,A =
Vds,DC · Im
· 1 − αk
4
(5.24)
dove
αk ≡
Vk
Vds,DC
(5.25)
rappresenta la tensione di ginocchio Vk normalizzata rispetto alla tensione di polarizzazione Vds,DC .
Nel caso di funzionamento di tipo Tuned Load, di cui in fig. 5.24 è riportata per
comodità la sola rete d’uscita (l’ingresso è adattato in modo complesso coniugato), è
105
Metodologie di progetto di amplificatori di potenza
Figura 5.24: Esempio d’amplificatore di tipo Tuned Load.
possibile determinare in forma chiusa le espressioni della resistenza di carico ottima,
del livello (normalizzato) della potenza d’uscita e dell’efficienza di drain ottenibili, in
funzione dell’angolo di circolazione φ (ossia della classe di polarizzazione e del livello
di pilotaggio:
1 − cos
φ
2
φ
2
RT L = RA · π ·
(5.26)
φ − sin
φ
φ
2
sin
−
φ
·
cos
2
2
Pdc,A
Pdc,T L =
·
φ
π
1 − cos 2
Prf,A φ − sin φ
Prf,T L =
·
π
1 − cos φ2
φ − sin φ
ηd,T L = ηd,A ·
2 sin φ2 − φ · cos φ2
(5.27)
(5.28)
(5.29)
Le quantità definite sono riportate graficamente in figura 5.25, in funzione dell’angolo di circolazione.
Per quanto riguarda la potenza dissipata sul dispositivo attivo, questa è esprimibile
nella forma:
Pdiss,T L
Pdc,A
=
·
π
"
#
−
sin φ2 · 2 + cos φ2
1 − cos
riportata graficamente in fig. 5.26.
106
"
φ
2
· 1 + 2 cos
φ
2
#
φ
2
(5.30)
Metodologie di progetto di amplificatori di potenza
Figura 5.25: Resistenza di carico ottimo a frequenza fondamentale (a), potenza dissipata in continua (b), potenza d’uscita (c) ed efficienza di conversione (d) normalizzate
rispetto alla Classe-A, in funzione dell’angolo di circolazione φ della corrente di uscita,
per il Tuned Load.
Figura 5.26: Potenza dissipata sul dispositivo attivo, normalizzata rispetto alla Classe
A, in funzione dell’angolo di circolazione φ della corrente di uscita per il Tuned Load.
107
Metodologie di progetto di amplificatori di potenza
Nel caso invece di configurazione di tipo resistivo o accordato, ovvero con una
resistenza a tutte le armoniche, come riportato in fig. 5.27, si ottengono le espressioni
riassunte in fig. 5.28.
Figura 5.27: Esempio d’amplificatore di tipo accordato.
Sulla base dei risultati semplificati ottenuti, è possibile effettuare alcune considerazioni di carattere pratico. Per amplificatori in classe A è preferibile scegliere (se
possibile) un dispositivo attivo con transconduttanza gm variabile linearmente, piuttosto che costante: nel caso Tuned Load la potenza d’uscita rimane costante, mentre
l’efficienza passa dal 50% al 78.5% (caso αk =1). Nel caso invece di terminazione di
tipo resistivo, si ha un degrado nelle prestazioni se la transconduttanza gm è lineare,
mentre non si hanno cambiamenti nel caso di gm costante, visto che in questo caso non
si ha una forte generazione di armoniche. Per la classe B invece si hanno prestazioni
migliori se si considera una transconduttanza costante anziché lineare. In tutti i casi
è comunque preferibile avere una terminazione di tipo Tuned Load anziché resistiva,
come è logico aspettarsi poiché si elimina la dissipazione di potenza sulle terminazioni
alle armoniche indesiderate.
Per quanto riguarda il valore di resistenza di carico ottima, questo varia ben poco
nel passare dalla classe A alla classe B (è addirittura lo stesso nei casi estremi se si
assume un gm costante, fig. 5.25a).
Gli amplificatori in classe A generalmente sono utilizzati come stadi di pilotaggio,
in quanto presentano un guadagno elevato con scarsi effetti di distorsione. Viceversa,
gli amplificatori in classe B sono molto più efficienti (η per un classe B è 1.5 volte più
108
Metodologie di progetto di amplificatori di potenza
grande che per un classe A in configurazione Tuned Load) fornendo grosso modo lo
stesso livello di potenza d’uscita, anche se con un guadagno ridotto di 1/4 rispetto alla
classe A.
Nelle considerazioni fatte in precedenza non si è tenuto conto degli effetti della
ammettenza di uscita del dispositivo attivo, in genere rappresentata come una conduttanza gds in parallelo ad una capacità Cds . Le considerazioni fatte in precedenza allora
continuano a rimanere valide, purché però siano riferite al generatore controllato Id .
Nel caso in cui il carico imposto a questo generatore non fosse puramente resistivo, la
retta di carico diverrebbe una curva (chiusa) di carico (un’ellisse)
Figura 5.28: Tabella numerico delle prestazioni di un sistema di amplificazione
Sempre con lo stesso modello semplificato, si può dimostrare per il Tuned Load
che il guadagno lineare diminuisce di 6 dB nel passare dalla Classe A alla Classe B.
Infatti, se si assume una stessa escursione del segnale di ingresso (vgs ), e quindi la
109
Metodologie di progetto di amplificatori di potenza
stessa potenza di ingresso Pin nei due casi si hanno le curve di carico riportate in fig.
5.29a.
(a)
(b)
Figura 5.29: Curve di carico (linearizzate) (a) e relativi andamenti di Pout vs Pin (b)
per il Classe A ed il Classe B.
Nel caso del Classe A si ha
Pout,A =
I
1 Im m
·
· Vds,DC − Vk =
· Vds,DC − Vk
2 2
4
(5.31)
Analogamente, per il Classe B si ha
Pout,B =
1 Im
·
·
2 4
Vds,DC − Vk
=
4
1
· Pout,A
4
(5.32)
In termini di guadagno è allora possibile scrivere
GA =
Pout,A
4 · Pout,B
=
= 4 · GB
Pin
Pin
(5.33)
e quindi
GA [dB]
= 10 · log10 4 + GB [dB]
= 6dB + GB [dB]
ottenendo quindi andamenti di Pout vs Pin come riportato in fig. 5.29b.
110
(5.34)
Appendice A
Algoritmo di Cripps
A.1
Algoritmo
Le considerazioni fatte nel capitolo sulla teoria di Cripps, suggeriscono l’opportunità
di usare le equazioni (5.14), (5.16), (5.19) e (5.21) al fine di costruire le curve a potenza
costante su carta di Smith.
Il modo di procedere può essere riassunto nel seguente modo:
1. Si calcola Ropt e Popt rispettivamente dalla (5.9) e (5.10);
2. Si valuta il valore di RL e GL per una curva a N-dBm usando la (5.14) e (5.19);
(a) Posto
PL,N = Popt − N
[dBm]
(b) Ricordando che
PL = 10
PL,N
10
[mWatt]
(c) Si individuano sulla carta di Smith i due punti resistivi
RL−HIGH = Ropt 100.1N
−1
GL−LOW = RL−HIGH
RL−LOW = Ropt 10−0.1N
−1
GL−HIGH = RL−LOW
(d) Si noti che RL−LOW e RL−HIGH devono essere eventualmente scambiati
in modo che sia soddisfatta la seguente condizione
RL−LOW < Ropt < RL−HIGH
111
Algoritmo di Cripps
3. Dal punto corrispondente a RL−LOW si tracciano sulla carta di Smith le curve
a resistenza costante, mentre dal punto corrispondente a RL−HIGH si tracciano
le curve a conduttanza costante;
4. Si individuano le intersezioni di tali curve;
5. La curva a N-dBm è definita da queste due curve, che soddisfano le eq. (5.16) e
(5.21)
(a) Si considera
XL =
q
2 − R2
Ropt
L−LOW
e
BL =
q
G2opt − G2L−LOW
(b) Si considerano poi valori di X ∈ [−XL , XL ] e B ∈ [−BL , BL ]
(c) Si calcola ZL = RL−LOW + jX e YL = GL−LOW + jB
(d) Metà della curva di livello è individuata dai punti su carta di Smith definiti
da
ZL − 50
ZL + 50
ΓL( =
mentre l’altra metà è individuata da
ΓL) =
0.02 − YL
0.02 + YL
(e) Si tracciano queste curve sulla carta di Smith
6. Si ripete dal passo 2 per un altro valore di N.
A.2
Esempio di costruzione dei ‘load pull contours’
In fig. A.1 sono riportate come esempio le curve di livello di Pout nel caso di Ropt =
20W , costruite mediante l’algoritmo descritto in precedenza.
E’ da osservare però che fino ad ora le reattanze parassite interne ed esterne presenti nel dispositivo attivo, non sono state affatto prese in considerazione. Allora, al
fine di ‘confrontare’ la previsione teorica con i dati misurati, è necessario introdurre l’effetto della capacità di uscita (o di drain) Cds e dell’induttanza di connessione esterna
(Ld ). Indicando allora con Zload l’impedenza di carico ai capi dei terminali d’uscita
112
Algoritmo di Cripps
Figura A.1: Curve di livello di Pout nel caso Ropt = 20W , riferite ai capi di Id .
del dispositivo attivo e con ZL quella ai capi del generatore controllato Id , si ha la
relazione
ZLoad
ZL · 1 − ω 2 Cds Ld − jωLd
=
1 − jωCds Ld
(A.1)
Ciò corrisponde ad uno ‘spostamento’ dei piani di riferimento. Il risultato che si
ottiene nel caso Cds = 1pF , Ld = 0.25nH e f = 10GHz è riportato in fig. A.2.
Figura A.2: Curve di livello di Pout nel caso Ropt = 20W , riferite ai terminali esterni
del dispositivo attivo.
113
Algoritmo di Cripps
A.3
Applicazione della metodologia di Cripps mediante l’uso di simulatori commerciali
Come detto in precedenza, le curve di potenza costante sono ottenute ‘seguendo’ sulla
carta di Smith le curve a resistenza o a conduttanza costante. Risulta allora evidente
che sarà necessario costruire (simulare) due circuiti risonanti, per ricreare al calcolatore queste due curve. Infatti, per disegnare il contorno di sinistra (corrispondente alla
curva a resistenza costante) sarà necessario un circuito RLC serie, mentre per disegnare la restante metà (corrispondente alla curva a conduttanza costante) sarà necessario
un circuito RLC parallelo.
Per quanto riguarda il circuito serie, riportato in fig. A.3, l’impedenza vista dalla
porta è data da
ZS = RS + jωLS +
1
jωCS
(A.2)
Figura A.3: Circuito risonante serie utilizzato per costruire metà curva di livello di
Pout .
Per ottenere il contorno a N-dBm, la resistenza deve esse determinata in accordo
con l’eq. (5.14):
RS = Ropt 10−0.1N
(A.3)
I componenti reattivi possono essere determinati dalle equazioni
+XL = ωHIGH LS −
−XL = ωLOW LS −
114
1
ωHIGH CS
1
ωLOW CS
(A.4)
(A.5)
Algoritmo di Cripps
dove ωLOW e ωHIGH sono i limiti in frequenza della banda di interesse. Risolvendo le equazioni precedenti si trova
XL · ωHIGH + ωLOW
LS =
2
2
ωHIGH
− ωLOW
2
2
ωHIGH
− ωLOW
CS = 2
2
XL · ωHIGH ωLOW
+ ωLOW ωHIGH
(A.6)
(A.7)
Analoga trattazione può essere fatta per il circuito parallelo, riportato in fig. A.4,
dove l’ammettenza vista dalla porta in questo caso è
YP =
1
1
+
+ jωCP
RP
jωLP
(A.8)
Figura A.4: Circuito risonante parallelo utilizzato per costruire metà curva di livello di
Pout .
Per ottenere il contorno a N-dBm, la resistenza deve esse determinata in accordo
con l’eq. (5.14).
RP = Ropt 100.1N
(A.9)
I componenti reattivi possono essere determinati dalle equazioni
+BL = ωHIGH CP −
−BL = ωLOW CP −
1
ωHIGH LP
1
ωLOW LP
(A.10)
(A.11)
dove ancora una volta ωLOW e ωHIGH sono i limiti in frequenza della banda di
interesse. Risolvendo le equazioni precedenti si trova
2
2
ωHIGH
− ωLOW
LP = 2
2
BL · ωHIGH ωLOW
+ ωLOW ωHIGH
XL · ωHIGH + ωLOW
CP =
2
2
ωHIGH
− ωLOW
115
(A.12)
(A.13)