Capitolo 2
CONVERTITORI STATICI PER L’AUTOMAZIONE
2.1 Generalità.
I convertitori statici hanno l’obiettivo di controllare i flussi di potenza tra ingresso ed uscita modificando
opportunamente alcune grandezze elettriche per mezzo di dispositivi a semiconduttore. Tale funzione è
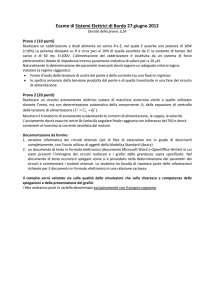
sintetizzata nello schema della Fig. 2.1, in cui il convertitore statico appare come un processore di potenza
capace di convertire, mediante dispositivi statici, le tensioni in ingresso di ampiezza Vi, frequenza fi e con un
numero di fasi pari ad mi in tensioni di uscita di ampiezza variabile V0, frequenza variabile f0 e con un numero di
fasi pari ad m0; inoltre il flusso di potenza può essere reso reversibile.
Figura 2.1: Processore di potenza
2.2 Convertitori CA-CC
Nella maggior parte delle applicazioni elettriche, l’ingresso di potenza fornito dall’ente erogatore di energia è
una sorgente di tensione di tipo sinusoidale a 50 o 60 Hz. Tale ingresso per poter essere utilizzato negli
azionamenti elettrici deve essere spesso convertito in una sorgente continua. Le finalità della conversione
possono essere due:
1. ottenere una tensione continua;
2. ottenere una corrente continua.
Nel primo caso la conversione avviene per la maggior parte attraverso ponti raddrizzatori a diodi non controllati;
affinché la tensione in uscita dal raddrizzatore presenti la minor oscillazione possibile, viene tipicamente
connessa come filtro al lato in corrente continua una capacità di valore elevato.
Tale soluzione presenta naturalmente il vantaggio di un costo estremamente contenuto soprattutto se il
raddrizzatore è direttamente connesso alla linea di alimentazione senza la presenza di un trasformatore in
ingresso, ma ha lo svantaggio di presentare una elevata distorsione delle correnti assorbite.
Nel secondo caso è necessario ricorrere a ponti controllati che alimentano un carico induttivo e quindi a
soluzioni decisamente più costose.
13
2.3 Raddrizzatori elementari non controllati.
Per introdurre i principi della conversione CA-CC con diodi non controllati verranno analizzati nel seguito
alcuni semplici convertitori che serviranno ad evidenziare caratteristiche di funzionamento che si ritroveranno
anche in convertitori più complessi.
2.3.1. Convertitore monofase a semplice semionda.
Il circuito monofase a semplice semionda è costituito da una sola valvola a conduzione unidirezionale posta in
serie ad un generico carico. Il circuito è alimentato da una tensione alternata sinusoidale. Tale configurazione
circuitale ha un limitato interesse pratico per le limitazioni intrinseche che presenta, tuttavia il suo studio mette il
luce una serie di peculiarità tipiche per comprendere i circuiti che trovano ampia applicazione.
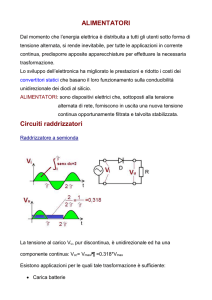
Figura 2.2 – Il convertitore elementare con carico resistivo (a) il circuito elementare; (b) forme d’onda di tensione e corrente
Si consideri il circuito rappresentato in Figura 2.2a con la sorgente sinusoidale vs. Nel caso di carico puramente
resistivo le forme d’onda sono quelle rappresentate in Figura 2.2b.
Come si può notare sia la tensione del carico vc che la corrente i presentano un valore medio diverso da zero.
Tale valore medio compare anche nella corrente erogata dal generatore. Ora, se l’alimentazione provenisse,
come spesso accade, da un trasformatore, tale componente continua potrebbe portarlo in saturazione,
compromettendo il buon funzionamento del sistema. E’ per questa ragione che il raddrizzatore monofase a
semplice semionda non è normalmente usato.
2.4 Raddrizzatore monofase a ponte non controllato.
La struttura tipica del raddrizzatore a ponte monofase utilizzato negli azionamenti elettrici è rappresentata in
Figura 2.3.
Si può notare la presenza di un condensatore di elevata capacità lato corrente continua, mentre la sorgente di
potenza, in generale, può essere modellata come una sorgente ideale di tensione sinusoidale vs con un impedenza
serie costituita da una sola induttanza Ls. Tale induttanza rappresenta il modello semplificato della linea e
dell’eventuale trasformatore di alimentazione e/o di un induttore di filtro.
14
Figura 2.3 – Raddrizzatore a ponte monofase.
2.4.1. Circuito ideale con Ls = 0 e carico resistivo.
Una prima approssimazione del funzionamento del raddrizzatore la si può ottenere studiando il circuito di
Figura 2.4: il carico è costituito esclusivamente resistivo (Cf=0) e in ingresso si trascura l’induttanza Ls.
Figura 2.4 – Raddrizzatore ideale con Ls = 0.
Nella configurazione proposta saranno in conduzione il diodo superiore che si trova con il potenziale anodico
maggiore e il diodo inferiore a potenziale catodico minore (si veda Figura 2.5) in cui i diodi in conduzione sono
rappresentati da un corto circuito, mentre quelli in stato di blocco come circuiti aperti. Gli andamenti delle
grandezze tensione e corrente sono rappresentati in Figura 3.5.
Figura 2.5 – Schema di conduzione delle valvole.
15
Figura 2.6 – Andamenti di tensione e corrente.
Il valore medio della tensione sul carico può essere ottenuta integrando l’andamento della tensione vs in un
semiperiodo come indicato nella seguente formula:
2.5 Raddrizzatore trifase a ponte non controllato.
Nelle applicazione industriali dove è disponibile una alimentazione trifase è preferibile utilizzare un ponte
raddrizzatore trifase che presenta oscillazioni di corrente più contenute rispetto all’equivalente monofase.
2.5.1. Ponte raddrizzatore con carico resistivo.
La struttura del convertitore è riportata in Figura 2.7 e le forme d’onda, ottenute in maniera analoga a quanto
visto per il ponte monofase, sono riportate in Figura 2.8 (sono in conduzione il diodo superiore con il maggior
potenziale anodico e il diodo inferiore con il minor potenziale catodico).
Figura 2.7 – Raddrizzatore trifase con carico resistivo.
16
Il potenziale del morsetto “P” rispetto al centro stella dei generatori “n” segue, quindi, l’inviluppo superiore delle
tre tensioni di fase, mentre quello del morsetto N segue l’inviluppo inferiore. La tensione sul carico vd coincide
con la tensione vPN tra i morsetti P e N: vd = vPn - vNn.
Il suo valore massimo è pari al valore massimo della tensione concatenata e la sua periodicità è pari a 1/6 del
periodo della fondamentale.
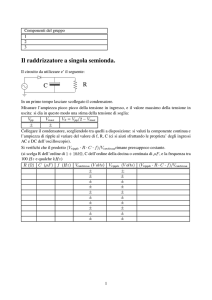
Figura 2.8 – Forme d’onda di tensione in un raddrizzatore trifase con carico resistivo.
Il valore medio della tensione raddrizzata può essere ottenuto integrando per T/6 la tensione concatenata (Vc è il
valore efficace della tensione concatenata):
La corrente nel carico resistivo ha un andamento simile a quello della tensione raddrizzata. La corrente di linea,
invece, si può facilmente ricostruire osservando che corrisponde alla corrente che circola nel diodo superiore
corrispondente e, cambiata di segno, alla corrente del diodo inferiore. Per la linea 1 risulta, quindi, i1 = iD1-iD4.
In Figura 2.9 viene mostrato l’andamento della corrente della linea 1 e, con tratteggio, la sua prima armonica:
Figura 2.9 – Forme d’onda di corrente in un raddrizzatore trifase con carico resistivo.
17
2.6 Raddrizzatori controllati.
Sono convertitori AC/DC con tensione, lato continua, regolabile in modulo. L'alimentazione AC è sinusoidale e
a frequenza fissa (in Italia 50 Hz). Vengono utilizzati, come valvole, i tiristori. Le potenze in gioco possono
essere elevate per le possibilità offerte da tali componenti (tensioni di blocco e correnti dirette elevate). Il flusso
di potenza può essere bidirezionale (funzionamento da raddrizzatore o da inverter), ma poiché la corrente non
può cambiare segno, questi convertitori operano solo su due quadranti.
Figura 2.10 – Funzionamento di un raddrizzatore controllato.
Tensioni Vd e correnti Id positive indicano un funzionamento da raddrizzatore, mentre con Vd negative e Id
positive si ha il funzionamento come inverter. In questo caso, per il corretto funzionamento del convertitore, è
necessaria la presenza, nel carico, di un generatore (batteria o forza elettromotrice) che mantenga a corrente Id
positiva.
Collegando opportunamente due convertitori a due quadranti è possibile ottenere un convertitore a 4 quadranti.
In Figura 2.11 viene mostrato un possibile collegamento di due convertitori.
Figura 2.11 – Funzionamento di un raddrizzatore controllato.
2.6.1. Convertitore monofase controllato a semplice semionda.
Il circuito monofase controllato a semplice semionda è costituito da una sola valvola (tiristore o SCR) a
conduzione unidirezionale, comandabile in chiusura, posta in serie ad un generico carico. Il circuito è alimentato
da una tensione alternata sinusoidale. Tale configurazione circuitale ha un limitato interesse pratico per le
limitazioni intrinseche che presenta, tuttavia il suo studio mette il luce una serie di peculiarità tipiche per
comprendere i circuiti che trovano ampia applicazione.
18
Figura 2.12 – Raddrizzatore controllato a semplice semionda, su carico resistivo.
Fino a quando non viene fornita la necessaria corrente ig al gate, il tiristore permane in stato di blocco (diretto e
inverso). Il carico risulta, quindi, scollegato dall’alimentazione. Nel momento in cui viene fatta circolare una
corrente ig opportuna, il tiristore si comporta come un diodo. Se, in tale istante, la valvola è polarizzata
direttamente, la valvola si chiude e permane in stato di chiusura senza necessità di mantenere la corrente ig.
Verranno ripristinate le capacità di blocco non appena la corrente della valvola (id o is) si annulla. Per i carichi
differenti dal caso puramente resistivo i ragionamenti sono simili a quelli presentati per il raddrizzatore non
controllato.
Figura 2.13 – Forme d’onda di tensione e corrente in un raddrizzatore controllato a semplice semionda con carico resistivo.
2.7 Raddrizzatore monofase a ponte controllato.
2.7.1. Raddrizzatore con corrente, lato continua, costante.
Si consideri il circuito rappresentato in Figura 2.14 in cui il carico può essere rappresentato da un generatore di
corrente costante. E’ il caso di carichi fortemente induttivi, in cui la variazione della corrente è limitata dalla
elevata costante di tempo del carico fino a tal punto da considerarla nulla. Come già visto per il caso di carico
resistivo, tra i diodi a catodo comune conduce quello che possiede il maggiore potenziale dell’anodo e,
viceversa, per i diodi ad anodo comune.
19
Figura 2.14 – Raddrizzatore controllato a ponte, su carico con corrente costante.
Mediante la corrente di gate dei tiristori, è possibile decidere l’istante di chiusura (t a=/) delle valvole stessa.
In Figura 2.15 vengono presentati gli andamenti delle correnti e delle tensioni sia di linea che del carico. Viene
anche presentato l’andamento della prima armonica della corrente di linea (is1). Si nota che l’istante di
accensione, a cui è associato l’angolo , determina anche lo sfasamento tra la tensione di linea vs e la prima
armonica della corrente is.
Il valore medio della tensione sul carico può essere ottenuta integrando l’andamento della tensione vs in un
semiperiodo:
Al variare dell’angolo è quindi possibile variare il valore medio della tensione sul carico, come presentato in
Figura 2.16. Per <p/2 si ha il funzionamento come raddrizzatore (Figura 2.16, Vd>0, id>0); per p/2<<p si ha
il funzionamento da inverter (Figura 2.16, Vd<0, id>0).
2.7.2. Raddrizzatore con corrente, lato continua, costante e induttanza di linea Ls ≠ 0.
Come già descritto in precedenza a proposito del ponte non controllato, la presenza di una induttanza di linea Ls
non permette che la corrente is possa assumere l’andamento a gradino di Figura 2.15, in quanto una variazione a
gradino implica una derivata infinita e, quindi, una tensione sull’induttanza (proporzionale alla derivata della
corrente) infinita.
20
Figura 2.15 – Forme d’onda di tensione e corrente in un raddrizzatore controllato a ponte, su carico con corrente
costante.
Figura 2.16 – Andamento della tensione sul carico in funzione dell’angolo .
Figura 2.17 – Raddrizzatore controllato a ponte, con corrente costante lato continua e Ls≠0.
21
In questo caso, però, l’istante di inizio della commutazione non corrisponde al passaggio per lo zero della
tensione di linea, ma è imposto dall’angolo di accensione dei tiristori.
Esisterà, quindi, un angolo di commutazione u in cui conducono simultaneamente la coppia di tiristori 1 e 3 e la
coppia 4 e 6. In questo periodo la tensione sul carico è nulla e il valore della corrente is passa da -Id a Id (o
viceversa nell’altro semiponte).
2.8. Raddrizzatore trifase a ponte controllato.
Il raddrizzatore trifase controllato ha un comportamento identico a quello non controllato, ad eccezione del fatto
che le valvole utilizzate non sono diodi ma tiristori. E’ possibile, quindi, decidere, mediante una opportuna
corrente di gate, l’istante di passaggio dalla stato di blocco diretto a quello di diodo. E’ facile intuire il fatto che
non ha senso comandare il gate prima che la valvola possa condurre; questo avviene per la valvola che possiede
il potenziale di anodo maggiore tra tutte quelle a catodo comune (superiori: 1,3,5), e per la valvola che possiede
il potenziale di catodo minore tra tutte quelle ad anodo comune (inferiori: 4,6,2).
2.8.1. Raddrizzatore con corrente, lato continua, costante.
Si consideri il circuito rappresentato in Figura 2.18 in cui il carico può essere rappresentato da un generatore di
corrente costante e pari a Id.
Figura 2.18 – Raddrizzatore trifase con generatore di corrente.
Il valore medio della tensione raddrizzata può essere ottenuto integrando per T/6 la tensione concatenata (Vc è il
valore efficace della tensione concatenata):
Variando è possibile ottenere in uscita una tensione variabile tra 1.35Vc e –1.35Vc. Per Vd()>0 (id non può
che essere positiva) si ha il funzionamento da raddrizzatore, mentre per Vd()<0 quello da inverter.
22
2.8.2. Raddrizzatore trifase con corrente, lato continua, costante e Ls ≠ 0.
Le uniche differenze rispetto al caso del ponte trifase non controllato riguardano il fatto che l’istante di
accensione non è naturale bensì comandato attraverso una opportuna corrente di gate. Ciò che cambia, quindi, è
l’istante di inizio della commutazione e le condizioni iniziali differenti.
Figura 2.19 – Raddrizzatore trifase con corrente costante lato continua e Ls≠0.
Si consideri la Figura 2.20 ed in particolare l’istante corrispondente all’angolo +/6. Appena prima di tale
istante sono in conduzione i tiristori 6 e 5. Appena dopo il tiristore 5 va in stato di blocco mentre l’1 inizia a
condurre. Il tiristore 6 continua a condurre la corrente Id.
Figura 2.20 – Andamento delle correnti di linea nel caso ideale di Ls=0.
2.9 - Analisi delle componenti deformanti.
Le componenti deformanti della corrente assorbita dal lato c.a. e della tensione generata lato c.c. possono essere
analizzate mediante l’analisi armonica. E' noto infatti che ogni funzione periodica può essere rappresentata come
la somma di una serie di sinusoidi (dette componenti armoniche), di periodo sottomultiplo rispetto al periodo di
ripetizione della funzione considerata.
La tabella o il diagramma che rappresenta l’insieme delle componenti armoniche si chiama lo spettro armonico.
La componente di ordine 1 è detta "Componente fondamentale".
23
Ciò premesso, si può facilmente calcolare l'ampiezza dell'armonica di ordine N della funzione che rappresenta
corrente assorbita dal lato c.a. dal circuito considerato nel paragrafo precedente, che risulta rappresentato
dall'espressione:
Lo spettro armonico comprende quindi tutte le armoniche di ordine dispari, ciascuna di ampiezza inversamente
proporzionale al proprio numero d’ordine N (vedere figura 2.21):
Figura 2.21 – Spettro armonico delle correnti di linea lato c.c.
2.10 - Effetto della presenza di una induttanza di dispersione nel trasformatore.
Negli schemi finora considerati si è supposto che il trasformatore di alimentazione sia ideale, cioè capace di
trasmettere la tensione sinusoidale da primario a secondario secondo un rapporto fisso, in modo assolutamente
indipendente dalla corrente circolante. Questa ipotesi non corrisponde alla realtà, poiché gli avvolgimenti del
trasformatore e la linea di alimentazione presentano necessariamente una loro resistenza elettrica, ed inoltre nel
trasformatore si presentano flussi dispersi che danno luogo ad effetti rappresentabili mediante una induttanza
posta in serie al secondario del trasformatore stesso. Nelle applicazioni pratiche, l’effetto più appariscente deriva
appunto dalla presenza di questa induttanza, dato che questa - ostacolando una rapida variazione della corrente determina fenomeni non trascurabili durante la commutazione della corrente tra i rami del circuito.
Durante la fase di commutazione la tensione applicata al carico è nulla; di conseguenza la tensione media sul
carico risulta ridotta in misura pari al rapporto tra l’area tratteggiata (con linee orizzontali) e il valore medio della
tensione nel semiperiodo. E’ facile dimostrare che tale area non dipende dalla parzializzazione, e cresce in diretta
proporzione con la corrente ICC (basta considerare che l’area è proporzionale al flusso che si determina nella
reattanza di dispersione del trasformatore, ed è quindi direttamente legato alla corrente).
24
Il fenomeno della commutazione non istantanea ha dunque come effetto quello di far decrescere linearmente la
tensione raddrizzata al crescere della corrente erogata. La caratteristiche esterna del raddrizzatore risulta come
rappresentato nella fig. seguente.
Figura 2.22 – Effetto della presenza dell’induttanza lato rete.
Con facili calcoli si può dimostrare che nel raddrizzatore del tipo finora discusso, la caduta di tensione
corrispondente alla corrente nominale espressa in p.u. della tensione nominale raddrizzata a vuoto è pari al 71%
della tensione di corto circuito del trasformatore espressa in p.u. della tensione nominale di rete Si noti che la
caratteristica è simile a quella di una sorgente di tensione in c.c. con una resistenza in serie; tuttavia il fenomeno
qui descritto non ha carattere dissipativo, ma si determina in seguito alla distorsione delle grandezze elettriche
conseguente a fenomeni reattivi (quindi senza perdite).
25
Figura 2.23 – Variazione della tensione raddrizzata al variare dell’angolo .
2.11 I Convertitori CC-CA
Nel caso si voglia convertire energia elettrica sottoforma di corrente continua in corrente alternata, realizzando
un generatore pilotato di tensione o corrente, ci si può avvalere di nuovo dei dispositivi a semiconduttore che
realizzano la funzione di interruttore statico.
L'elemento di base di tali circuiti di conversione è costituito dal ramo rappresentato in fig. 2.24. La sorgente
ideale di tensione continua Vd è rappresentabile come la serie di due generatore ideali del valore Vd/2 il cui punto
di collegamento N è definito come centro virtuale.
Nell’ipotesi che anche le valvole s1 e s2 siano ideali, il potenziale del morsetto a può assumere solo i valori -V/2
oppure +V/2, a seconda che sia chiuso rispettivamente l’interruttore s2 o s1. Si noti che, grazie alla presenza dei
diodi posti in opposizione alle valvole principali, la corrente assorbita dai circuiti a valle del morsetto a può
essere sia positiva sia negativa, qualunque sia lo stato delle valvole; perciò il flusso di energia potrà essere
bidirezionale.
Gli interruttori s1 ed s2 a seconda del tipo di applicazione e dei livelli di potenza potranno essere scelte tra quelle
messe a disposizione dalla tecnologia dei semiconduttori a commutazione forzata (transistor, MOSFET, IGBT,
GTO).
Figura 2.23 –Ramo elementare convertitore cc/ca.
26
Pilotanto in maniera periodica, simmetrica ed alternata le valvole s1 e s2 si può ottenere una tensione alternata di
periodo T come indicato in fig. 2.24.
Figura 2.24 – Forme d’onda ramo elementare convertitore cc/ca.
In fig. 2.24 si sono rappresentate anche le funzioni logiche f(s1) e f(s2) che rappresentano lo stato dei rispettivi
interruttori evidenziando il comando simmetrico e complementare degli stessi.
La tensione istantanea vaN del polo a rispetto al centro virtuale N della alimentazione ha forma d’onda quadra
simmetrica e assume alternativamente valore pari a +Vd/2 e –Vd/2.
Tale struttura è però raramente utilizzata in pratica perché prevede l’utilizzo di una sorgente di tensione duale in
cui si hanno a disposizione due tensioni continue uguali collegate in serie.
2.11.1. Inverter monofase.
Componendo due rami elementari come in fig. 2.25 si ottiene un inverter monofase.
Figura 2.25 – Inverter monofase.
In fig. 2.26 sono indicate le modalità di pilotaggio e le forme d’onda ottenibili dall’inverter. Si sono indicate le
funzioni stato logico degli interruttori in maniera sintetica utilizzandone una per ramo elementare (fra ed frb)
considerando il fatto che il pilotaggio degli interruttori dello stesso ramo è complementare. Quindi quando esse
27
assumono il valore logico 1 significa che è pilotato l’interruttore superiore, viceversa quando assumono il valore
logico 0 l’interruttore inferiore.
Pilotando quindi i due rami in maniera complementare e periodica si ottiene una tensione alternata tra il polo a e
il b che stavolta assume i valori +Vd e –Vd.
Si è ottenuto un inverter monofase ad onda quadra. Il vantaggio rispetto al ramo elementare è che non è più
necessaria una alimentazione duale e che la tensione in uscita ha valore massimo pari alla tensione continua in
ingresso. Variando il periodo T di pilotaggio è possibile variare la frequenza della tensione in uscita. Per variare
invece l’ampiezza della tensione di uscita è necessario disporre di una sorgente a monte Vd avente ampiezza
pilotabile ad esempio mediante un chopper.
Sviluppando in serie di Fourier la tensione vab si evince la presenza di una armonica fondamentale alla frequenza
f=1/T e delle armoniche di ordine superiore che a seconda delle applicazioni potranno o meno essere tollerate dal
carico.
Come vedremo di seguito nel caso il carico richieda forme d’onda di tensione alternata esistono modalità di
pilotaggio che consentono di ridurre la presenza di armoniche.
Figura 2.26 –Forme d’onda inverter monofase ad onda quadra.
2.11.2. Inverter trifase ad onda quadra a sei gradini.
La struttura di inverter trifase è ottenibile unendo 3 rami elementari di inverter come indicata in fig.2.27. La
numerazione degli interruttori è effettuata tendo conto della loro sequenza di accensione.
Pilotando infatti secondo la sequenza delle funzioni logiche di ramo (fra frb frc) è possibile ottenere una terna di
tensioni alterante trifase simmetriche. Le funzioni logiche di pilotaggio sono in questo caso sfasate tra di loro
rispettivamente di 2T/3 nella sequenza a,b,c.
28
Figura 2.27 – Inverter trifase.
Anche in questo caso cambiando il periodo T delle funzioni di comando è possibile variare la frequenza del
sistema trifase generato, così come per cambiare il modulo della tensione si deve agire sulla tensione continua Vd
a monte introducendo ad esempio un chopper.
Ipotizzando che il carico applicato al convertitore sia di natura induttiva, ad esempio, la corrente della fase a che
lo percorre assume l’andamento di Fig. 2.28. Come è possibile notare essa assume un andamento che è distante
dall’essere sinusoidale,cosa prevedibile del resto considerando le espressioni delle tensioni di fase (si vedano le
11.9) in cui vi è un certo contenuto armonico.
Figura 2.28 – Corrente ia generata da un inverter ad onda quadra a 6 gradini
Nel caso il carico sia un motore elettrico la presenza di armoniche nella corrente fa si che anche la coppia
generata abbia un certo contenuto armonico che non sempre è accettabile.
Esiste, come vedremo di seguito, una diversa modalità di pilotaggio dell’inverter che consente la riduzione del
contenuto armonico sulle correnti e addirittura la possibilità di eliminare il primo stadio per la regolazione del
modulo della tensione.
29
2.12 Tecniche di modulazione.
Un inverter è un dispositivo equipaggiato con valvole elettroniche di potenza in grado di fornire in uscita una
tensione alternata a partire da una tensione continua in ingresso. Esistono varie tecniche con le quali è possibile
ottenere una regolazione della tensione in uscita:
1. Tecnica di modulazione ad onda quadra parzializzata;
2. Tecnica di modulazione ad onda quadra frazionata;
3. Tecnica di modulazione “Trifase Space Vector” per inverter VSI;
4. Tecnica di controllo Pulse Width Modulation (PWM).
2.12.1. Tecnica di controllo Pulse Width Modulation (PWM)
Si tratta in sostanza di un controllo realizzato mediante frazionamento dell’onda di tensione in cui però, a
differenza della tecnica precedente, la larghezza degli impulsi di conduzione viene modulata mediante un
confronto fra un’onda portante triangolare (vt) ed un’onda modulante sinusoidale (vc), in modo che:
v t ( t ) v c ( t ) TON
v t ( t ) v c ( t ) TOFF
e, al solito, a TON corrisponde la chiusura degli interruttori elettronici superiori delle gambe del ponte e l’apertura
di quelli inferiori, e viceversa per TOFF .
Avendo definito:
v̂ c
m a v̂
t
m Tc f
f Ts f c
(indice di modulazione)
(rapporto fra le frequenze)
Come deve essere, il duty-cycle risulta variabile nel tempo; il valor medio della tensione in uscita vale:
v u AV Vd
v c (t)
v̂ t
relazione da cui si vede come variando le onde portante e modulante è possibile variare la tensione in uscita
come desiderato.
Il metodo della sotto-oscillazione è semplice da implementare usando circuiti analogici con buoni risultati anche
per frequenze dell’ordine della decina di kHz. Nel caso delle tecniche digitali sono disponibili microcontrollori
dotati di unità programmabili che, avendo in ingresso i dati della portante e della modulante, sono in grado di
fornire direttamente gli istanti di commutazione per le tre fasi dell’inverter.
30
v̂ t
vt(t)
vc(t)
Ts
v̂ c
t
Tc
vu(t)
+Vd
tih
tsh
tdh
t
tfh
-Vd
Ts
Ton
Fig.2.29 – Forme della portante e della modulante necessarie per il controllo PWM dell’ l’inverter a ponte
monofase e forma d’onda della tensione in uscita da esso
Per realizzare una terna di tensioni trifase basta generare tra tensioni modulanti sfasate di un terzo di periodo tra
di loro (120° gradi elettrici). I risultati della comparazione delle tre modulanti con la portante fornisce gli istanti
di commutazione del singolo ramo elementare di inverter.
Figura 2.30 – Modulanti e portante per la generazione di impulsi PWM trifase.
Applicando la tensione trifase generata da un inverter con modulazione PWM ad un carico del tipo ohmicoinduttivo si ottiene una corrente che ha andamento molto prossimo al sinusoidale se l’indice di modulazione mf è
31
sufficientemente elevato. Infatti le componenti armoniche di tensione diverse dalla fondamentale assumono
frequenze maggiori e vengono filtrate dalla componente induttiva del carico la quale offre una impedenza
maggiore all’aumentare della frequenza.
Figura 2.30 – Corrente di fase su carico equilibrato alimentato da inverter 3fase con modulazione PWM (mf = 15).
2.13 I convertitori DC/DC (chopper)
2.13.1. Chopper buck (funzionamento sul primo quadrante)
Nell’esposizione di tutti i tipi di chopper si considererà sempre un carico elettrico puramente resistivo e si
interporrà fra il chopper ed esso un filtro di tipo LC, atto a migliorare la forma d’onda della tensione in uscita. In
riferimento alla Fig.2.17, si potrà allora assumere:
v o ( t ) Vo VC
iL(t)
L
io(t)
IS
vL(t)
iu
D
C
Vd
Vo
R
vu
Figura 2.31 – Configurazione Chopper buck
L’interruttore Is rappresenta una valvola comandata, qui considerata ideale; indicando con TON il periodo in cui
esso è chiuso (stato di conduzione) e con TOFF il periodo in cui è aperto (stato di blocco), si definisce il dutycycle (rapporto di intermittenza) come segue:
TON
Ts
32
relazione nella quale Ts = TON + TOFF rappresenta il periodo complessivo. Per il chopper buck sono possibili due
modalità di funzionamento, ossia a corrente iL(t) continua o a corrente iL(t) discontinua.
2.13.2. Funzionamento a corrente iL(t) continua.
In tal caso le curve di funzionamento sono rappresentate in Figg. 2.32 – 2.33.
(Vd Vo ) TON VO (Ts TON ) 0
Vo
Vd
relazione che mostra come variando il duty-cycle è possibile variare la tensione in uscita dal chopper.
vL(t)
vL(t)
Ts
Vd-Vo
Ts
Vd-Vo
t
t
-Vo
-Vo
TON
TOFF
TON
iL(t)
TOFF
iL(t)
Î L
IL
t
Fig.2.32: Funzionamento ad iL continua per il chopper buck
t
Fig.2.32: Condizione limite del funzionamento ad iL continua
per il chopper buck
La condizione limite di funzionamento continuo (cfr. Fig.2.19) si ha quando i minimi assoluti della iL(t) sono
nulli; in tal caso il valor medio di essa vale:
IL
T
1
1 V Vo
1
Î L d
TON s (Vd Vo )
2
2
L
2
L
Se i minimi si abbassano ancora di più divenendo negativi, si ha il funzionamento ad iL(t) discontinua; ciò
avviene se, a parità di sorgente Vd, la resistenza R diviene troppo elevata.
2.13.3. Chopper boost (funzionamento sul quarto quadrante)
La costituzione fisica di tale convertitore è rappresentata in Fig.2.21; trattasi di un chopper mai impiegato a sé
nell’ambito degli azionamenti elettrici, bensì utilizzato per la “costruzione” del chopper buck-boost.
33
2.3.3 Chopper buck-boost (funzionamento sul primo e quarto quadrante)
Riunendo un chooper buck ed un chopper boost si ottiene, come mostrato in Fig.2.33, un chopper buck-boost,
avente la possibilità di lavorare sul primo e sul quarto quadrante del piano tensione-corrente relativo al carico.
Un convertitore del genere si rivela necessario, ad esempio, negli azionamenti per trazione elettrica; per
convenzione si pone:
I S1 ON, I S1 OFF TON
I S1 OFF, I S2 ON TOFF
iL(t)
L
io(t)
D
vL(t)
iu
IS
Vd
C
Vo
R
vu
Figura 2.33 – Chopper boost
IS
io(t)
D
iu
R
C
vL(t)
Vd
L
Vo
vu
Figura 2.34 – Chopper buck - boost
34
vo(t)
Ts
Vd
VO
Vd
Vo
TOFF
TON
t
Figura 2.35 – Curve di funzionamento del chopper buck-boost.
Il chopper a 2 e 4 quadranti
Affinché il frazionatore possa gestire situazioni in cui la corrente i2 assume valori negativi, ad esempio quando il
carico è rappresentato da un motore in condizioni di frenatura, è necessario rimuovere il vincolo di
unidirezionalità della corrente corredando lo schema di fig. 2a di due ulteriori valvole (un diodo e una valvola a
commutazione forzata).
E’ chiaro che questa situazioni si può presentare solamente se il carico può essere “attivo” cioè contenere un
generatore di tensione (situazione che si incontra con il motore elettrico) così come rappresentato in fig. 3
Nel caso di funzionamento con corrente positiva saranno coinvolte le valvole Valv2 e D1 viceversa Valv1 e D2
nel caso di corrente negativa.
Fig. 3 Chopper a 2 quadranti su motore a C.C.
Con un sistema di questo tipo è possibile pilotare motori con frenatura a recupero di energia.
Analizziamone il comportamento in presenza di un cambiamento della direzione delle correnti e quindi di
inversione del flusso di energia. In questo caso occorre che il dispositivo permetta il fluire della corrente da una
sorgente a tensione più bassa (il motore)ad una con tensione più alta (la sorgente di alimentazione V1), quindi il
chopper funziona nella configurazione di “elevatore”. In Figura 4 viene riportato lo schema del chopper quando
funziona in questa condizione trascurando la presenza delle valvole inattive (Valv2 e D1) e la resistenza R del
motore.
35
Fig. 4 – Schema del chopper per il recupero di energia o frenatura.
Come si può notare dalla Fig. 4, lo schema del chopper nella condizione di “elevatore” o frenatura rispetto al
chopper “abbassatore” (si veda fig. 2a), la valvola pilotata ed il diodo sono esattamente scambiati.
Riferendosi nuovamente al pilotaggio della valvola Valv1 durante il funzionamento, le equazioni seguenti
corrispondono quindi rispettivamente alle equazioni del sistema nella fase di accensione 1) e nella fase di
spegnimento 2) di essa:
Il passaggio dell’energia in direzione inversa è, quindi, reso possibile dall’elemento induttivo, che nella fase di
accensione della valvola viene caricato dalla tensione E relativa alla f.e.m. del motore, e nella successiva fase di
spegnimento contribuisce ad innalzare la tensione E ad un valore prossimo a V1 (leggermente maggiore)
consentendo la polarizzazione del diodo D2.
Infatti nella fase di accensione la corrente I2 aumenta poiché il circuito si chiude attraverso la Valv1 e si
accumula energia nella induttanza L (EL=LI2/2 ), la tensione vL sull’induttanza è quindi positiva. Quando si
“spegne” la Valv1 affinché venga rispettata la legge di Kirchhoff delle tensioni vL dovrà essere negativa e la
corrente I2 quindi deve diminuire.
Ovviamente in un chopper a 2 quadranti sono presenti entrambe le configurazioni, riunite in un unico dispositivo
(come già indicato in fig. 3). Il cambio di configurazione e funzionamento avviene in modo elettronico attraverso
i comandi delle valvole Valv1 e Valv2.
Volendo ora ottenere un funzionamento reversibile sia in corrente che in tensione (cioè il funzionamento a 4
quadranti), si può utilizzare la configurazione di fig. 4. Chiudendo infatti la valvola 4 e facendo funzionare le
valvole 1 e 2 come illustrato nel circuito precedente, si ottiene sul carico una tensione positiva con corrente
bidirezionale; chiudendo invece la valvola 1 e facendo funzionare alternativamente le valvole 3 e 4 si ottiene sul
carico una tensione negativa.
Tale convertitore è applicato al comando di motori in cui si desidera avere frenatura a recupero di energia e
funzionamento con velocità di rotazione in entrambi i versi.
36
Fig. 4 Chopper a 4 quadranti
37