26-Nov-13
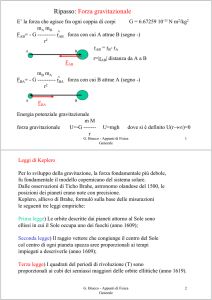
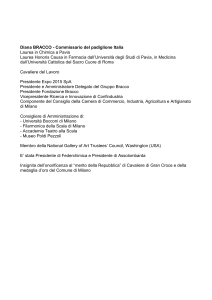
Per trattare il moto dei satelliti o dei pianeti utilizziamo le coordinate polari (r, ϑ )
con ϑ angolo che forma il vettore posizione con l’asse x. Derivando il vettore
posizione (vedi figura) si ottengono 2 termini (la derivata del modulo di r e la
derivata del versore radiale) da cui la velocità in coordinate polari e’ data da:
^ dove il versore tangente e’ quello calcolato per il moto
v=(dr/dt) ^r+ r (dϑ/dt)t
^
^ con ^t=(-sen ϑ, cos ϑ)
circolare. Infatti r=(cos
ϑ, sen ϑ) e derivando si ottiene (dϑ/dt)t
e (dϑ/dt)=ω.
Da osservare che per il moto circolare il modulo
r=costante (traiettoria e’ una circonferenza), nel
caso del moto dei pianeti r e’ variabile poiche’ il
pianeta non ha distanza costante dal Sole, da cui
una velocita’ con componente radiale.
r=r ^r
ϑ
O≡Polo
Sul centro del corpo
che genera la forza
x
Inoltre per il calcolo del momento angolare (asse
z perpendicolare al foglio)
^
^
l= r x (m v )= r x (m ω r t) = m ω r2 k perche’ la
componente radiale della velocita’ non
contribuisce al prodotto vettoriale.
Leggi di Keplero
Per lo sviluppo della gravitazione, la forza fondamentale più debole,
fu fondamentale il modello copernicano del sistema solare.
Dalle osservazioni di Ticho Brahe, astronomo olandese del 1500, le
posizioni dei pianeti erano note con precisione.
Keplero, allievo di Brahe, formulò sulla base delle misurazioni
le seguenti tre leggi empiriche:
Prima legge) Le orbite descritte dai pianeti attorno al Sole sono
ellissi in cui il Sole occupa uno dei fuochi (anno 1609);
Seconda legge) Il raggio vettore che congiunge il centro del Sole
col centro di ogni pianeta spazza aree proporzionali ai tempi
impiegati a descriverle (anno 1609);
Terza legge) I quadrati del periodi di rivoluzione (T) sono
proporzionali ai cubi dei semiassi maggiori delle orbite ellittiche (anno 1619).
G. Bracco - Appunti di Fisica Generale
2
1
26-Nov-13
Prima di Newton si riteneva che i corpi celesti e quelli sulla Terra
fossero governati da leggi differenti. Infatti i corpi celesti continuano a muoversi
mentre i corpi sulla Terra si fermano (a causa degli attriti!).
Inoltre le orbite dei pianeti erano curve regolari e chiuse.
Newton intuì che le leggi erano invece le stesse. La quantità differente era la
distanza dalla Terra, la forza gravitazionale dipende dalla distanza r. Vediamo come
siano ricavabili le leggi di Keplero (nella 3a legge assumeremo che la forza dipende
dalla distanza come 1/r2):
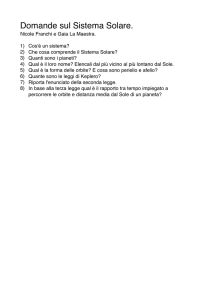
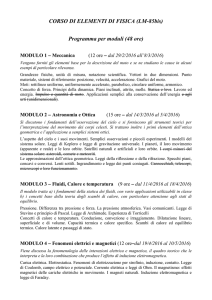
2a legge) la forza gravitazionale è centrale, quindi il momento della quantità di
moto del corpo (polo sul Sole) si conserva l=r×mv=cost e in modulo
|l|=rm(ωr)=mωr2; l’area spazzata in un tempo ∆t è la somma dell’area dei 2
triangoli (½)r (r∆θ)+ (½)r ∆θ ∆r da cui (∆A/∆t)= (½)r (∆θ/∆t)+(½)r (∆θ /∆t) ∆r ma per
∆t→0 si ha ∆r →0 e ∆θ /∆t → ω da cui (dA/dt)=(1/2) r2ω = ½ l /m quindi
proporzionale a |l| che è costante.
∆r
r+∆r
∆θ
∆r
r
r
~ang.retto
r+∆r
r∆θ
G. Bracco - Appunti di Fisica Generale
3
3a legge) nell’ipotesi di orbite ellittiche con eccentricità nulla (circonferenze)
l’equazione di moto nella direzione radiale vale(acc.centripeta dovuta alla gravita’) GmM/ r2=-m ω2r ⇒ GM/ω2=r3 ; (GM/4π2)T2 =r3 ; viceversa se si parte dalla
conoscenza della 3a legge di Keplero si ricava che la forza deve dipendere dalla
distanza come r - 2
1a legge) dalla conservazione del momento angolare la traiettoria è
piana e giace sul piano individuato dal vettore l (normale al piano).
Assumiamo che il piano dell’orbita sia quello xy. Il momento angolare vale
^
l=mωr2 k.
Scriviamo la velocità in coordinate polari: derivando la posizione r=r ^r
v=(dr/dt) ^r+ r (dϑ/dt)t^
v2=(dr/dt)2+r2 (dϑ/dt) 2=(dr/dt) 2+r2 ω2
La forza gravitazionale è conservativa e si ha conservazione dell’energia
E=K+U=(1/2)m v2+U(r)=(1/2)m(dr/dt)2+(1/2)mr2 ω2 +U(r)=
(1/2)m(dr/dt)2+Veff(r)=costante dove il potenziale efficace è definito come
Veff (r)= (1/2)mr2 ω2 +U(r)=(l2 / 2mr2)+ U( r) con l il modulo del
momento angolare (costante). Questo potenziale tiene conto del fatto che
se il corpo si avvicina al Sole deve aumentare la sua velocita’ per mantenere
il mom.angolare costante.
G. Bracco - Appunti di Fisica Generale
4
2
26-Nov-13
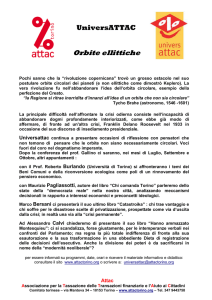
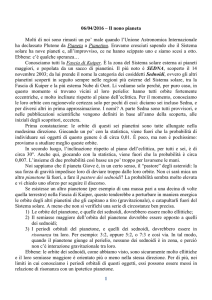
Per il moto radiale Veff ( r) è il potenziale da usare (quindi moto unidimensionale) e per
mM
U=-G ------- la forma di Veff ( r) è
E
r
~1/r2
mostrata nella figura a fianco.
Per piccole distanze il potenziale
diverge a +∞ a causa del termine
r
‘centrifugo’ l2 / 2mr2. Invece a grande
distanza (r→∞) l’andamento è quello
~ -1/r
dell’energia potenziale coulombiana.
Osserviamo che la velocità angolare dipende dalla distanza attraverso la conservazione
del momento angolare
quindi con l’artificio di considerare Veff ( r) possiamo trattare il problema come se fosse
unidimensionale nella sola coordinata radiale, nonostante il moto sia in un piano. In
particolare si può analizzare ove sono le regioni premesse al moto per ogni energia.
G. Bracco - Appunti di Fisica Generale
5
Per un’energia E=Emin(<0) l’orbita è a r*=costante (circolare);
per Emin <E<0 orbite ellittiche tra r1 e r2,
per E=0 orbita parabolica;
per E>0 orbita iperbolica;
la distanza minima viene detta
perielio (ed esiste sempre)
e afelio quella maggiore nel
caso ellittico.
Si dice che il sistema è legato
se il corpo non può abbandonare
il centro di attrazione
(stato legato del sistema).
E
~r-2
r1 r* r2
~r-2
r
Emin
Traiettoria (rossa continua) confinata
tra le circonferenze di raggi r1 e r2
G. Bracco - Appunti di Fisica Generale
6
3
26-Nov-13
Cenno: Per dimostrare quale sia la forma dell’orbita consideriamo come fatto
finora l’approssimazione che la massa del Sole sia M>>m in modo da trascurare il
moto dei due corpi attorno al centro di massa comune (il centro di massa di un
sistema verrà definito successivamente).
E=(1/2)m(dr/dt)2+(1/2)mr2 ω2 –GmM/r e l=mωr2 sono costanti
ω=dθ/dt=l/mr2 supponendo r=r(θ) e θ=θ(t) in modo da eliminare t si ha
dr/dt=(dr/dθ) (dθ/dt) =(dr/dθ)ω= (dr/dθ) l/mr2 ,
2E+ 2GmM/r = (l2/mr4 )(dr/dθ)2+ (l2/mr4)r2 = (l2/mr4) ((dr/dθ)2+ r2 )
Cambiamo variabile w=r-1, (dw/dθ)=(dw/dr)(dr/dθ)=-(1/r2) )(dr/dθ)
cioè (dr/dθ)=- r2(dw/dθ)
2E+2GMm w= (l2/m)(dw/dθ)2+ (l2/m)w2 da cui
(dw/dθ)2+ w2 –2 (GM m2 /l2 )w= 2(Em/l2) completiamo il quadrato
(dw/dθ)2+ w2 –2 (GM m2 /l2 )w+ (G2M2 m4 /l4 ) = 2(Em/l2)+ (G2M2 m4 /l4 )
Il secondo membro è una costante positiva, chiamiamola H2,
(dw/dθ)2+ (w –GM m2 /l2 )2 = H2, cambiamo variabile u= (w –GM m2 /l2 )
(du/dθ)=(dw/dθ) e quindi (du/dθ)2+ u2 = H2,
(du/dθ) = ±√(H2-u2) separando le variabili e scegliendo il segno +
∫du/ √(H2-u2) = ∫dθ si ottiene u=Hcos(θ- θi) (col meno u=H sen(θ- θi) ma solo la
condizione iniziale sarebbe diversa).Sostituendo a ritroso per tornare alla
variabile r si ottiene
G. Bracco - Appunti di Fisica Generale
7
w= (GM m2 /l2 )+ √[2(Em/l2)+ (G2M2 m4 /l4 )]cos(θ- θi)=
(GM m2 /l2 )(1+ √[1+2(Em/l2)/ (G2M2 m4 /l4 )]cos(θ- θi)
infine
r=(l2 /GM m2 )/(1+ √[1+2(E l2)/ (G2M2 m3 )]cos(θ- θi))
Ricordiamo che l’equazione delle coniche è del tipo
r=A/(1+ e cos(θ)) con e eccentricità (e=0 circonferenza, 0<e<1 ellisse, e=1
parabola, e>1 iperbole) e= √1+2(E l2 / (G2M2 m3 )]
L’energia minima si ha nel punto r*, dVeff ( r*) /dr=0 da cui r*= l2 / GMm2 e
Emin=E(r*)=- G2M2 m3 /(2 l2) (la velocità radiale è nulla poiché r=r*=costante)
Con tale energia e=0 orb.circolare, per valori maggiori negativi 0<e<1orb.ellittica.
Sezioni coniche
1. Parabola
2. cerchio e ellisse
3. iperbole
G. Bracco - Appunti di Fisica Generale
8
4
26-Nov-13
Semiassi a e b
Almeno uno tra A B e C diverso da 0
Ellisse (A=C, B=0, circonferenza)
parabola
iperbole
Eccentricita’
5
26-Nov-13
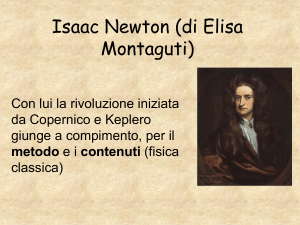
Eccentricità:
Per le orbite ellittiche può essere calcolata come distanza tra l'apoasse (distanza maggiore, per orbite
attorno al Sole afelio, per orbite attorno alla Terra apogeo) A e il periasse (distanza minore, per Sole
perielio, per Terra perigeo) P:
e= (A-P)/(A+P) [A-P è anche la distanza fra i fuochi dell’ellisse].
dove: P è il raggio di pericentro, A è il raggio di apocentro. Per e=0 orbite circolari, 0<e<1 orbite
ellittiche, e=1 orbite paraboliche, e>1 orbite iperboliche.
Per esempio, l'eccentricità dell'orbita
della Terra oggi è 0.0167. Nel tempo,
l'eccentricità dell'orbita terrestre varia
lentamente, passando da quasi 0 a circa
0.05 come risultato dell'attrazione
gravitazionale tra i pianeti.
Orbite quasi circolari
diameter
(Ea rth=1 )
diameter (km )
mass
(Ea rth=1 )
mean dist
from Sun (AU)
orb. period
(Ea rth ye a rs )
orbital
eccentr.
Mercury
Venus
Earth
Mars
Jupiter
Saturn
Uranus
Neptune
0.382
0.949
1
0.532
11.209
9.44
4.007
3.883
0.18
4878
12104
12756
6787
142800
120000
51118
49528
2300
0.055
0.815
1
0.107
318
95
15
17
0.002
0.39
0.72
1
1.52
5.2
9.54
19.18
30.06
39.44
0.24
0.62
1
1.88
11.86
29.46
84.01
164.8
247.7
0.2056
0.0068
0.056
0.0461
0.0097
110.2482
0.0167
0.0483
G. Bracco -0.0934
Appunti di Fisica
Generale
Pluto
Se un corpo ha un’energia (totale) negativa rispetto ad un pianeta non può
abbandonarlo perché a distanza finita la velocità radiale si annullerebbe. Per
liberare il corpo è necessaria un’energia positiva e se il corpo parte da una certa
distanza dal pianeta, occorre imprimergli una velocità pari a quella di fuga. In
particolare, la velocità di fuga è quella minima per portare all’infinito il corpo con
energia nulla E=K+U=0. Per la Terra, partendo dalla superficie, RT raggio della Terra,
(1/2)m v2+U(RT)=0 da cui ________
vf =√2G MT / RT =11.2 km/s MT
= 5.98 x 1024 kg
N Molecole in un gas hanno un’energia cinetica media
E in base alla temperatura del gas
Da cui la velocita’ quad.media
V=√3kBT
Per O2 a T=273 K (0 C) v=461 m/s
G. Bracco - Appunti di Fisica Generale
12
6
26-Nov-13
Parametri dei pianeti del sistema solare
Mercury
diameter
0.382
(Earth=1)
diameter (km )
4878
mass (Earth=1)
0.055
mean dist
0.39
from Sun (AU)
orb. period
0.24
(Earth years )
orbital
0.2056
eccentr.
mean orb. vel
47.89
(km/ sec )
rotation period
58.65
(in Earth days )
inclination of
0
axis (degrees )
mean temp. at
-180 to 430
surface (C )
gravity at
0.38
equat (Earth=1)
escape vel
4.25
(km/ sec )
mean density
5.43
(water=1)
Venus
Earth
Mars
Jupiter
Saturn
Uranus
Neptune
0.949
1
0.532
11.209
9.44
4.007
3.883
0.18
12104
0.815
12756
1
6787
0.107
142800
318
120000
95
51118
15
49528
17
2300
0.002
0.72
1
1.52
5.2
9.54
19.18
30.06
39.44
0.62
1
1.88
11.86
29.46
84.01
164.8
247.7
0.0068
0.0167
0.0934
0.0483
0.056
0.0461
0.0097
0.2482
35.03
29.79
24.13
13.06
9.64
6.81
5.43
4.74
-243
1
1.03
0.41
0.44
-0.72
0.72
-6.38
177.4
23.45
23.98
3.08
26.73
97.92
28.8
122
465 -89 to 58
-82 to 0
Pluto
-150
-170
-200
-210
-220
0.9
1
0.38
2.64
0.93
0.89
1.12
0.06
10.36
11.18
5.02
59.54
35.49
21.29
23.71
1.27
5.25
5.52
3.93
1.33
0.71
1.24
1.67
2.03
G. Bracco - Appunti di Fisica Generale
13
Si puo’ derivare dall’equazione matriciale
Matrice simmetrica con determinante diverso da zero defisce una sezione conica.
Determinante di
E’ proporzionale all’opposto di
E quindi definisce il tipo di sezione conica
Ellisse
Ellissoide
Con assi principali lungo
XYZ
7