Tecniche di realtà virtuale ed aumentata applicate ad un
microscopio operativo.
Training e supporto per neurochirurghi
A. De Mauro1, M. Aschke1, J. Raczkowsky1, R. Wirtz2, M. Ciucci1, H. Wörn1
for Process Control and Robotics, University of Karlsruhe (TH) , Germany,
2Neurosurgical Department, Clinic University of Heidelberg, Germany
Contacts: [email protected]
1Institute
Abstract
Presso l’Institute for Process Control and Robotics dell’Università di Karlsruhe (Germania) è stato
realizzato un primo prototipo di microscopio in Realtà Aumentata.
In questo articolo presentiamo gli studi attuali orientati ad estendere tale architettura dall’uso operativo
a quello di completo strumento di training per giovani neurochirurghi.
I potenti strumenti offerti dagli ultimi sviluppi della realtà virtuale (interfacce aptiche con ritorno di forze e
modellazioni fisiche) sempre più accurati e performanti garantiscono risultati ottimi nell’apprendimento
del gesto chirurgico e minimizzano i tempi di formazione. E’ il naturale sviluppo del Computer Aided
Surgery (CAS).
Keywords: Realtà Aumentata e Virtuale, Training System, Neurochirurgia, Interfacce Aptiche, Rilevazione
delle Collisioni, Modellazione Fisica, Tracking System, Navigazione.
Introduzione e background ( microscopio 3D in realtà aumentata).
In neurochirurgia, una buona parte degli interventi (approssimativamente il 60% nelle
cliniche della Europa centrale) viene eseguita utilizzando un microscopio per rendere più
accurata la sequenza dei piccoli gesti chirurgici. Attualmente i microscopi commerciali
offrono la possibilità di visualizzare il contorno bidimensionale delle regioni tumorali
sovrapposto alla visione reale. Tali contorni sono ottenuti segmentando le immagini
CT/MRI del paziente durante un minuzioso lavoro radiologico preoperativo.
Questo stato dell’arte risulta limitante per numerosi neurochirurghi poiché delega ad essi
l’arduo compito di immaginare la struttura tridimensionale dei tumori: ciascun medico
deve effettuare il lavoro mentale di ricostruzione 3D da immagini piane. Il livello di
esperienza nonchè quello di stanchezza influiscono pesantemente sui risultati dei delicati
interventi.
Presso l’Institute for Process, Control and Automation dell’ Università di Karlsruhe
(Germania) è stato realizzato un primo prototipo di microscopio in Realtà Aumentata [1].
L’idea è quella di offrire ai neurochirurghi la possibilità di visualizzare le strutture
tridimensionali delle regioni di particolare interesse ai fini dell’intervento in sala
operatoria. Tale visualizzazione non può che essere stereoscopica per una buona
sovrapposizione alla realtà (ovviamente stereo e bi-oculare del microscopio).
Sono richieste due operazioni preliminari per una efficace visualizzazione in AR: la
registrazione e la calibrazione.
Lo scopo della registrazione è quello di trovare un matching tra l’anatomia reale del
paziente e le immagini CT/MRI e relative ricostruzioni 3D. Per far questo, si identificano
dei punti noti sul paziente (il numero è proporzionale al grado di accuratezza voluto) e si
trova la corrispondenza sulle informazioni dell’ambiente virtuale a disposizione.
Una volta ottenuta la relazione tra i vari sistemi di riferimento legati al reale (paziente,
dispositivo di tracking, strumenti chirurgici) e al virtuale (ricostruzioni 3D) si è pronti per
la visualizzazione in real-time.
Ovviamente, questo passo deve essere preceduto dalla calibrazione delle camere per
l’utilizzo dei corretti parametri di visualizzazione e dall’allineamento con le due (una per
oculare) viste virtuali per ottenere l’effetto stereoscopico.
Poiché durante l’effettivo svolgimento dell’operazione il chirurgo si avvale di un sistema
di navigazione a display per capire l’effettiva posizione degli strumenti nell’anatomia
celebrale, il sistema é in fase d’integrazione con 3DSlicer [2], eccellente applicazione
opensource per la navigazione intraoperatoria, del tutto simile ai ben noti prodotti
commerciali (es. BrainLab o Stryker).
Sviluppi attuali e futuri: il simulatore di training neurochirurgico.
L’obiettivo di questa nuovo progetto di ricerca è lo sviluppo di un sistema di training per
giovani neurochirurghi basato sugli strumenti di realtà virtuale e su un vero microscopio
operativo.
Il realismo della simulazione è, in questo caso, strettamente legato al gradi di accuratezza
della modellazione fisica dei tessuti e dell’anatomia celebrale ed, ovviamente, dalla
precisione del ritorno di forze fornito dall’interfaccia aptica (un Phantom Desktop della
Sensable).
Lo stato dell’arte in tema di simulazioni neurochirurgiche è ridotto a pochi studi [3].
Le motivazioni di questa rarità d’esempi sono da ricercarsi sia nella complessità della
modellazione dei tessuti e dell’anatomia del cervello (che è il sistema più complesso
dopo quello cardiaco) e sia nell’utilizzo di strumenti di input visivo (head mounted
displays o semplici monitor) diversi dal microscopio realmente impiegato in sala
operatoria.
Da questa considerazione scaturisce l’idea di riutilizzare una parte dell’architettura
precedentemente descritta per implementare un completo e realistico sistema
d’addestramento basato su microscopio per il ritorno visivo e su interfaccia aptica per
ritorno di forze.
Si tratta quindi di integrare, al sistema già esistente, i moduli per la rilevazione delle
collisioni tra organi e strumenti chirurgici [4], per la modellazione fisica di tessuti e per il
calcolo della forza a valle di una collisione.
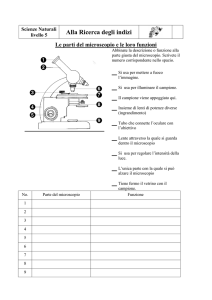
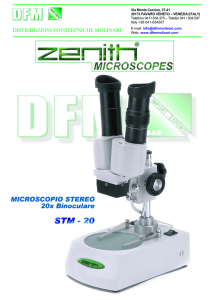
In Figura 1 è riportato l’ architettura funzionale del simulatore.
Figura 1: schema funzionale del simulatore
Nella fase pre-simulazione sarà ricostruito (off-line) l’ambiente virtuale a partire dai dati
del paziente virtuale. Questo implica la creazione dei modelli 3D e l’assegnamento dei
parametri fisici (es. elasticità dei singoli tessuti). In letteratura esistono differenti
metodiche per la modellazione fisica e i principali sono: Finite Element Method (FEM),
Long Element Method (LEM), Mass spring Damper. I primi due sono basati su modelli
matematici continui e quindi sono più robusti e forniscono un elevato realismo a spese di
un fortissimo carico computazionale.
Il metodo delle masse e delle molle invece è meglio classificabile come discreto ma si
sposa meglio con i vincoli di real-time. Tali vincoli sono molto stringenti se si utilizza
un’interfaccia meccanica ad elevato frame rate quale quella aptica e soprattutto se si
considera il normale ritardo dovuto al rendering della scena direttamente negli oculari del
microscopio.
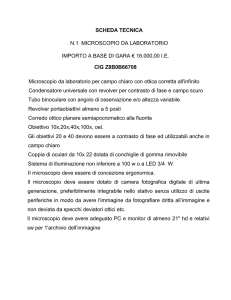
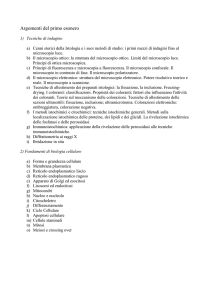
In questa prima fase del progetto abbiamo deciso di adottare quest’ultimo metodo per
focalizzare meglio l’attenzione sulla parte di complessa integrazione tra piattaforma di
realtá virtuale, interfaccia aptica e microscopio (fig.2).
Durante la simulazione il modello dinamico del tessuto é descritto da un sistema di
equazoni differenziali (1).
r r r
r
r
r r
mi ai + ci vi + ∑ j∈σ (i ) Fij ( xi , x j ) = mi g + Fi ext (1)
r
r
vi
x
i
Dove
é il vettore coordinate del nodo Ni,
e
r
ai
sono i vettori velocitá ed
r
Fi ext
accellerazione rispettivamente, ci é il coefficiente di smorzamento e
é la forza
σ (i )
é il set di indici per i nodi adiacenti a Ni nella mesh
esterna totale applicata su Ni e
3D del modello.
Il cuore di ogni sistema che simuli l’interazione fisica tra oggetti é la rilevazione delle
collisioni. E’ l’abilitá di rilevare quando due oggetti nella scena sono in contatto.
Un fattore chiave dell’intera simulazione é costruire una algoritmo di collision detection
robusto,veloce ed accurato.
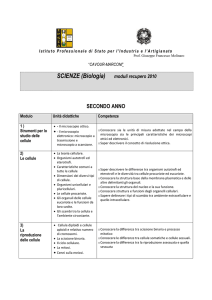
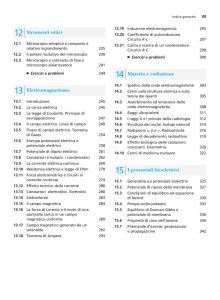
Il metodo scelto si basa su partizioni del modello, ossia sulla strategia di suddividere
l’oggetto in sottoinsiemi coerenti computandone, per ciascuno, il volume che lo contiene.
Tale volume dovrebbe quanto piú possibile aderire all’oggetto allo scopo di minimizzare
i test di collisione ad esso riferiti (fig.3).
Se viene rilevato un contatto, posizione e velocitá sono calcolate per ogni punto
interessato nella collisione.
I dati provenienti da questo modulo sono la risposta alle collisioni ovvero la base per il
calcolo della forza da restituire all’utente tramite l’interfaccia aptica.
Figura 2: Interazioni con tessuti deformabili
Figura 3: Rilevazione delle collisioni
(AABB- Axis Aligned Bounding Box)
Nel processo, in tempo reale, di rendering grafico dovranno essere calcolate tutte le
collisioni tra oggetti e strumenti chirurgici.
Affinché la simulazione sia ancora più completa e realistica è possibile visualizzare la
navigazione degli strumenti nella regione intracraniale su un monitor utilizzando lo stesso
sistema di tracking e 3DSlicer (come in precedenza). Questo riflette l’iter adottato in sala
operatoria.
Conclusioni
In questo articolo presentiamo l’architettura e le caratteristiche principali di un sistema di
training integrato in un microscopio operativo. Tali studi si basano su un prototipo di
microscopio in realtà aumentata sviluppato precedentemente che stiamo modificando per
adattarlo alle nuove esigenze estendendolo con nuove funzionalità per una più accurata e
completa navigazione.
Questo lavoro è parte del progetto europeo CompuSurge finanziato nell’ambito del
programma quadro FP6 all’interno della Marie Curie action.
REFERENCES
1.
2.
3.
4.
M. Aschke, C. R. Wirtz, J. Raczkowsky, H. Wörn, S. Kunze, “Augmented Reality in Operating Microscopes
for Neurosurgical Interventions”, 1st International IEEE EMBS Conference on Neural Engineering 2003 Proceedings pp. 652 - 655, 2003, Editor Wolf & Strock.
3DSlicer Project URL: http://www.slicer.org/ [status July 2007]
G. Wiet, J. Bryan, D. Sessanna, D. Streadney, P. Schmalbrock, and B. Welling, "Virtual temporal bone
dissection simulation," in Medicine Meets Virtual Reality 2000, J. D. Westwood, Ed., Amsterdam, The
Netherlands, January 2000, pp. 378– 384, IOS Press.
G. Van den Bergen, “Efficient Collision Detection of Complex Deformable Models using AABB Trees”,
Journal of Graphics Tools, 2(4), 1-13, 1997.