Corso di Fondamenti di Telecomunicazioni
7 – INFLUENZA DEI DISTURBI SULLE
PRESTAZIONI DEI SISTEMI DI COMUNICAZIONE
Prof. Mario Barbera
[parte 3]
1
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
Sistemi di trasmissione binario
Cercheremo una procedura generale per il calcolo della probabilità
che un simbolo di informazione a valle del decisore sia errato: BER
2
(Bit Error Rate)
1
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
Segnale in uscita al ricevitore
Indichiamo con T l’intervallo necessario per la trasmissione di un simbolo
Il segnale trasmesso sull’intervallo di segnalazione (0,T) è allora:
s (t ) 0 < t ≤ T
s (t ) = 1
s 2 (t ) 0 < t ≤ T
per il simbolo binario 1
per il simbolo binario 0
cioè s1(t) ed s2(t) sono le forme d’onda utilizzate per trasmettere rispettivamente il bit 1 e 0.
Il segnale all’ingresso del ricevitore (comprensivo di rumore), sarà:
r (t ) 0 < t ≤ T
r0 (t ) = 01
r02 (t ) 0 < t ≤ T
se è stato trasmesso il simbolo 1
se è stato trasmesso il simbolo 0
3
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
Segnale in uscita al ricevitore
Il segnale r0(t) viene campionato ad un opportuno istante di
campionamento t0 all’interno dell’intervallo (0,T), cioè 0 < t0 ≤ T. Per cui:
r (t ) 0 < t ≤ T
r0 (t 0 ) = 01 0
r02 (t 0 ) 0 < t ≤ T
se è stato trasmesso il simbolo 1
se è stato trasmesso il simbolo 0
Visto che il segnale ricevuto è disturbato da un processo di rumore
aleatorio, r0(t0) sarà una variabile aleatoria continua.
Per semplificare la notazione, d’ora in poi la indicheremo con:
r
r0 = r0 (t 0 ) = 01
r02
se è stato trasmesso il simbolo 1
se è stato trasmesso il simbolo 0
4
2
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
Statistiche del rumore
Per il calcolo della BER abbiamo bisogno di conoscere la statistica
delle variabili aleatorie r01 ed r02. In particolare siamo interessati alle
seguenti densità di probabilità:
f (r0 | s1 trasmesso)
f (r0 | s 2 trasmesso)
Ci serve quando r0=r02
Ci serve quando r0=r01
Dipendono da:
• caratteristiche del disturbo introdotto nel canale
• filtri utilizzati
• rivelatore utilizzato
• tipo di segnale binario trasmesso
Verranno determinate di volta in volta
5
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
Espressione generale della BER
Supponiamo che, in assenza di rumore, si abbia r0>VT per il simbolo trasmesso 1 e
r0<VT per il simbolo trasmesso 0. (VT = Tensione di soglia del decisore).
Si ha errore quando avendo trasmesso il simbolo 1, si ha r0<VT. La probabilità di
questo evento è:
VT
P(errore | s1 trasmesso) =
∫ f (r | s )dr
−∞
0
1
0
Oppure si ha errore quando avendo trasmesso il simbolo 0, si ha r0>VT. La
probabilità di questo evento è:
P (errore | s 2 trasmesso) =
+∞
∫ f (r | s )dr
0
2
0
VT
6
3
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
Espressione generale della BER
Dal teorema delle probabilità totali abbiamo quindi:
BER = P (errore | s1 trasmesso) P ( s1 trasmesso) + P (errore | s 2 trasmesso) P ( s 2 trasmesso)
Ovvero:
VT
∫
∫
+∞
BER = P ( s1 trasmesso) f (r0 | s1 )dr0 + P ( s 2 trasmesso) f (r0 | s 2 )dr0
−∞
VT
Molto spesso si pone:
P ( s1 trasmesso) = P ( s 2 trasmesso) =
1
2
7
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
BER nel caso di rumore gaussiano
Supponiamo che:
• Il rumore introdotto dal canale sia un processo stazionario
gaussiano in senso lato a media nulla
• Il ricevitore, ad eccezione del dispositivo di decisione, sia lineare
Il rumore in uscita al sistema lineare è anch’esso gaussiano a
media nulla.
r0 = s0 + n0
dove r0 = r0 (t 0 ); s0 = s0 (t 0 ); n0 = n0 (t 0 )
s
s0 = 01
s02
se è stato trasmesso il simbolo 1
se è stato trasmesso il simbolo 0
dove s01 ed s02 sono costanti note ogni qualvolta, per un dato ricevitore, sono
fissate le forme d’onda d’ingresso s1(t) ed s2(t).
8
4
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
BER nel caso di rumore gaussiano
Se n0 è una variabile aleatoria gausiana a media nulla, il campione r0
sarà anch’esso gaussiano con valo medio s01 oppure s02, a seconda
che venga trasmesso il bit 1 o il bit 0. Quindi:
−
1
f (r0 | s1 ) =
2π σ 0
(r 0 −s01 )2
2σ 02
e
1
f (r0 | s 2 ) =
2π σ 0
−
e
(r 0 −s02 )2
2σ 02
2
2
dove σ 0 = n0 (t ) rappresenta la potenza media del campione
di rumore all’uscita del ricevitore.
Quindi, nel caso di bit equiprobabili si ottiene:
VT
∫
∫
+∞
Pe = BER = P ( s1 trasmesso) f (r0 | s1 )dr0 + P ( s 2 trasmesso) f (r0 | s 2 )dr0 =
−∞
=
1
2
VT
∫
−∞
(r 0 −s01 )2
−
1
2π σ 0
2σ 02
e
dr0 +
1
2
VT
∫
+∞
VT
(r 0 −s02 )2
−
1
2π σ 0
2σ 02
e
dr0
9
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
BER nel caso di rumore gaussiano
Dopo un semplice cambio di variabili si ottiene:
1
Pe =
2
=
1
2
∫
VT
∫
−∞
−
1
2π σ 0
+∞
1
2π
−(VT − s01 ) σ 0
(r 0 −s01 )2
2σ 02
e
e
−
λ2
2
1
dr0 +
2
dλ +
1
2
∫
∫
+∞
VT
+∞
(VT −s02 ) σ 0
−
1
2π σ 0
1
2π
e
e
−
λ2
2
(r 0 −s02 )2
2σ 02
dr0 =
dλ
Infine:
Pe =
dove: Q( x) =
∫
+∞
x
1 − VT + s01 1 VT − s02
+ Q
Q
2 σ
2 σ 0
0
1
2π
e
−
x2
2
dx
10
5
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
Posizione ottima della soglia in caso di
rumore gaussiano
La posizione ottima della soglia VT è quella che minimizza la BER.
Imponiamo quindi che la derivata della BER rispetto a VT sia nulla:
dPe 1
=
dVT 2
1
e
2π σ 0
cioè:
−
(V − s )2
− T 01
2σ 02
1
−
2
(VT − s01 )2
2σ 02
e
=e
−
1
e
2π σ 0
(V −s )2
− T 02
2σ 02
=0
(VT −s02 )2
2σ 02
il che implica la condizione:
(V
T
− s 01 ) = (VT − s 02 )
2
2
Di conseguenza otteniamo la minima probabilità di errore scegliendo
per la soglia del comparatore il valore
VT =
s01 + s02
2
Fondamenti di TLC - Prof. M. Barbera
11
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
Probabilità di errore con rumore
gaussiano e soglia ottima
Sostituendo l’espressione della soglia ottima nella relazione per il
calcolo della BER si trova:
s −s
Pe = Q 01 02
2σ 0
= Q
(s
2
− s02 )
4σ 02
01
Osservazione:
Per massimizzare la BER occorre massimizzare l’argomento della
funzione Q.
Obiettivo:
Trovare quel particolare filtro di ricezione che massimizzi il rapporto
[s
(t 0 ) − s02 (t 0 )]
2
01
σ 02
Soluzione: FILTRO ADATTATO
=
[s
(t 0 )]
2
d
σ 02
12
6
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
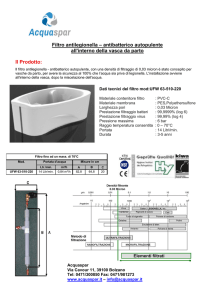
Filtro adattato
Consideriamo il sistema:
r(t) = s(t) + n(t)
FILTRO ADATTATO
H(f)
h(t)
r0(t) = s0(t) + n0(t)
•
Supponiamo di conoscere la forma d’onda del segnale s(t), e che esso sia un segnale
a durata limitata.
• Supponiamo inoltre di conoscere la densità spettrale di potenza Pn(f) del rumore
additivo (stazionario).
2
• Ci proponiamo di trovare h(t) in modo tale che il rapporto S = s0 (t )
N out
n02 (t )
risulti massimo in corrispondenza di un certo istante di campionamento t0.
OSSERVAZIONE IMPORTANTE:
Il filtro adattato non conserva la forma d’onda del segnale in ingresso. La sua funzione è quella di
distorcere il segnale d’ingresso e il rumore in modo che all’istante di campionamento t0, il livello
del segnale utile sia il più elevato possibile rispetto al valore efficace del rumore.
13
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
Filtro adattato: TEOREMA
Il filtro adattato ha risposta in frequenza
H( f ) = K
S * ( f ) − j 2π t
e
Pn ( f )
0
dove S(f) è la trasformata di Fourier del segnale d’ingresso avente
durata pari a T secondi, Pn(f) è la densità spettrale di potenza del
rumore in ingresso, t0 è l’istante di campionamento in corrispondenza
del quale valutiamo il rapporto (S/N) in uscita e K è una costante
arbitraria diversa da zero.
14
7
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
Filtro adattato: Dimostrazione
Il segnale in uscita dal filtro all’istante t0 è:
s0 (t 0 ) =
+∞
∫ H ( f ) S ( f )e
jωt0
df
−∞
Mentre la potenza di rumore in uscita vale:
n02 (t 0 ) =
+∞
∫ H( f )
−∞
2
Pn ( f )df
Da cui:
+∞
∫ H ( f )S ( f )e df
∫ H ( f ) P ( f )df
s (t )
S
= 2 0 =
n0 (t 0 )
N out
2
0
jωt0
−∞
+∞
2
n
−∞
15
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
Filtro adattato: Dimostrazione
Ricordando la diseguaglianza di Schwarz:
∫
2
+∞
A( f ) B( f )df
−∞
≤
+∞
+∞
∫ A( f ) df ∫ B( f )
2
−∞
2
df
−∞
E ponendo:
B( f ) =
A( f ) = H ( f ) Pn ( f )
S ( f )e jωt
0
Pn ( f )
Si ottiene:
+∞
S
=
N out
+∞
+∞
∫ H ( f )S ( f )e df ≤ ∫ H ( f ) P ( f )df ∫ S ( f ) P ( f ) df
∫ H ( f ) P ( f )df
∫ H ( f ) P ( f )df
−∞
+∞
−∞
jωt0
2
n
−∞
+∞
2
n
−∞
S
≤
N out
∫
+∞
−∞
S( f )
−∞
2
n
2
n
2
Pn ( f )
df
16
8
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
Filtro adattato: Dimostrazione
S
≤
N out
∫
+∞
−∞
S( f )
2
Pn ( f )
df
Il massimo del rapporto (S/N) si ottiene quando vale il segno di
uguaglianza, che, secondo Schwarz, si ottiene quando A(f) = KB*(f),
ovvero quando:
H ( f ) Pn ( f ) =
KS * ( f )e − jωt
0
Pn ( f )
ossia:
H( f ) =
KS * ( f )e − jωt0
Pn ( f )
che corrisponde alla tesi.
17
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
Filtro adattato in caso di rumore bianco
Se supponiamo che il rumore in ingresso sia rumore bianco con
densità spettrale di potenza costante e pari a N0/2, l’espressione
della funzione di trasferimento del filtro adattato diventa:
H( f ) =
2K *
S ( f )e − jωt0
N0
Calcolando la risposta all’impulso si trova:
h (t ) = F
−1
+∞
{H ( f )} = 2 K ∫ S
N0
*
−∞
( f )e − jωt0 e jωt df =
*
2 K +∞
2K *
S ( f )e j 2πf (t0 −t ) df =
s 0 (t 0 − t )
N 0 −∞
N0
∫
Se il segnale s(t) è reale:
h(t ) =
2K
s(t 0 − t )
N0
Quindi nel caso di rumore bianco, la risposta impulsiva del filtro
adattato è semplicemente il segnale (noto) d’ingresso, ruotato intorno
18
all’asse delle ordinate e traslato di t0.
9
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
Rapporto (S/N) in uscita dal filtro adattato
in caso di rumore bianco
Calcolando il rapporto (S/N) in uscita dal filtro adattato otteniamo:
S
=
N out
∫
+∞
−∞
S( f )
2
N0 2
df =
2
N0
+∞
∫ s (t )dt
−∞
2
0
Teorema di Parseval
Quindi:
Energia del segnale
2Es
S
=
N
N0
out
Quindi il rapporto (S/N) in uscita dal filtro adattato dipende
dall’energia del segnale e dal livello della densità spettrale di potenza
del rumore, ma non dalla particolare forma d’onda impiegata.
Ovviamente è possibile innalzare il livello dell’energia del segnale per
migliorare il rapporto (S/N)out incrementandone l’ampiezza, la durata,
o entrambi questi parametri.
19
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
BER nel caso di rumore bianco e impiego
del filtro adattato
Il nostro obiettivo era quello di cercare quel particolare filtro di
ricezione che massimizzasse il rapporto
[s
(t 0 ) − s02 (t 0 )]
2
01
=
[s
(t 0 )]
2
d
σ 02
σ 02
Adesso sappiamo che questo può essere ottenuto con un filtro adattato
al segnale differenza sd(t) = s01(t) - s02(t), ossia con un filtro la cui
risposta all’impulso è:
h(t ) = C [s1 (t 0 − t ) − s 2 (t 0 − t )]
con C =
2K
N0
Dai risultati sul filtro adattato, sappiamo che in questo caso:
[s
(t 0 )]
2
d
σ
2
0
=
2Ed
N0
con
Ed =
∫ [s (t ) − s (t )] dt
T
2
1
2
0
E
d
Quindi, in questo caso, la BER vale: Pe = Q
2N 0
20
10
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
Prestazioni dei sistemi binari in banda
base: segnalazione unipolare
Le due forme d’onda in banda base corrispondenti rispettivamente
ai simboli binari 1 e 0 sono:
s1 (t ) = + A
0<t ≤T
(simbolo binario 1)
s 2 (t ) = 0
0<t ≤T
(simbolo binario 0)
Consideriamo due casi:
• impiego di un filtro passa-basso
• impiego di un filtro adattato
21
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
BER per segnalazione unipolare con filtro
passa-basso
La banda B del filtro va scelta
• abbastanza larga in modo tale che il segnale utile unipolare
non venga apprezzabilmente distorto; ad esempio B > 2/T
• abbastanza stretta in modo che allo stesso tempo la
componente di rumore abbia potenza ridotta
Sotto queste ipotesi si può supporre che:
s 2 (t 0 ) ≈ 0
s1 (t 0 ) ≈ A
σ 02 =
N0
(2 B ) = N 0 B
2
Quindi il valore della soglia ottima è:
VT =
Mentre la BER vale:
Pe = Q
(s
s 01 + s02 A
=
2
2
2
− s02 )
A2
= Q
2
4N0 B
4σ 0
01
22
11
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
BER per segnalazione unipolare con filtro
adattato
Scegliendo come istante di campionamento t0 = T; ed essendo
l’energia del segnale differenza Ed = A2T, si trova:
Ed
Pe = Q
2N0
2
= Q A T
2N0
= Q Eb
N0
dove Eb rappresenta l’energia media per bit.
Si dimostra facilmente che in questo caso il filtro adattato è un
integratore, per cui la soglia ottima vale:
VT =
1 T
AT
Adt + 0 =
2 0
2
∫
23
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
Prestazioni dei sistemi binari in banda
base: segnalazione polare
Le due forme d’onda in banda base corrispondenti rispettivamente
ai simboli binari 1 e 0 sono:
s1 (t ) = + A
0<t ≤T
(simbolo binario 1)
s 2 (t ) = − A
0<t ≤T
(simbolo binario 0)
In questo caso si trova facilmente che:
• nel caso si utilizzi un un filtro passa-basso
Pe = Q
(s
2
A2
− s02 )
= Q
N0B
4σ 02
01
VT =
s 01 + s 02
=0
2
• nel caso si utilizzi un filtro adattato
Ed
Pe = Q
2N 0
2
= Q 2 A T
N0
= Q 2 E b
N
0
VT =
s01 + s 02
=0
2
A parità di BER il sistema con segnalazione polare ha prestazioni migliori rispetto al
24
sistema unipolare in quanto richiede un rapporto Eb/N0 di 3 dB inferiore
12
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
Prestazioni dei sistemi binari in banda
base: segnalazione bipolare
Le due forme d’onda in banda base corrispondenti rispettivamente
ai simboli binari 1 e 0 sono:
s1 (t ) = ± A
0<t ≤T
(simbolo binario 1)
s 2 (t ) = 0
0<t ≤T
(simbolo binario 0)
In questo caso si trova che:
• nel caso si utilizzi un un filtro passa-basso
3
A2
Pe = Q
2 4 N 0 B
2 soglie
A
VT = ±
2
• nel caso si utilizzi un filtro adattato
Pe =
3 Eb
Q
2 N 0
VT = ±
A
2
La BER di una segnalazione bipolare è pari a 3/2 quella relativa ad una segnalazione
25
unipolare
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
BER in sistemi con modulazione OOK:
demodulazione coerente
Le due forme d’onda in banda base corrispondenti rispettivamente
ai simboli binari 1 e 0 sono:
s1 (t ) = A cos(ω c t + θ c )
0<t ≤T
(simbolo binario 1)
s 2 (t ) = 0
0<t ≤T
(simbolo binario 0)
In questo caso si trova che:
• nel caso si utilizzi un un filtro passa-basso
A2
Pe = Q
8N 0 B
VT =
A
2
• nel caso si utilizzi un filtro adattato
Eb
Pe = Q
N0
T
∫
VT = A cos 2 (ω c t + θ c )dt
0
La BER del ricevitore per segnali OOK è esattamente la stessa di quella che si ha con
26
segnalazione unipolare in banda base
13
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
BER in sistemi con modulazione OOK:
demodulazione ad inviluppo
Si trova:
Pe =
1 A
Q
2 2σ
A2
1 − 8σ
+ e
2
2
VT =
A
2
2
Con σ = N 0 B p e Bp = Banda del filtro in ingresso al ricevitore
La BER del ricevitore con demodulazione ad inviluppo per segnali OOK ha prestazioni
inferiori rispetto a quello con demodulazione coerente
27
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
BER in sistemi con modulazione BPSK:
demodulazione coerente
Le due forme d’onda in banda base corrispondenti rispettivamente
ai simboli binari 1 e 0 sono:
s1 (t ) = A cos(ω c t + θ c )
0<t ≤T
(simbolo binario 1)
s 2 (t ) = − A cos(ω c t + θ c )
0<t ≤T
(simbolo binario 0)
In questo caso si trova che:
• nel caso si utilizzi un un filtro passa-basso
A2
Pe = Q
2N0 B
VT = 0
• nel caso si utilizzi un filtro adattato
E
Pe = Q 2 b
N
0
VT = 0
Le prestazioni della modulazione BPSK sono le stesse della segnalazione polare in banda
28
base e sono superiori di 3 dB rispetto a quelle fornite dal sistema OOK.
14
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
BER in sistemi con modulazione FSK:
demodulazione coerente
Le due forme d’onda in banda base corrispondenti rispettivamente
ai simboli binari 1 e 0 sono:
s1 (t ) = A cos(ω1t + θ c )
0<t ≤T
(simbolo binario 1)
s 2 (t ) = A cos(ω 2 t + θ c )
0<t ≤T
(simbolo binario 0)
In questo caso si trova che:
• nel caso si utilizzi un un filtro passa-basso
A2
Pe = Q
4N0 B
VT = 0
• nel caso si utilizzi un filtro adattato
Eb
Pe = Q
N0
VT = 0
Le prestazioni della modulazione FSK sono le stesse di quelle ottenute con la OOK e
29
inferiori di 3 dB rispetto a quelle fornite dal sistema BPSK.
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
BER in sistemi con modulazione FSK:
demodulazione ad inviluppo
2
Si trova:
Pe =
1 − 4Aσ
e
2
2
VT = 0
2
Con σ = N 0 B p e Bp = Banda del filtro in ingresso al ricevitore
Si può vedere ce il ricevitore FSK non coerente richiede un rapporto Eb/N0 superiore a
quello necessario al coerente di meno di 1 dB quando la Pe è dell’ordine di 10-4 o meno.
Visto che il ricevitore non coerente è molto più semplice del coerente, in quanto non
richiede il recupero della fase della portante, la maggior parte dei ricevitori FSK utilizza
in pratica la rivelazione non coerente.
30
15
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
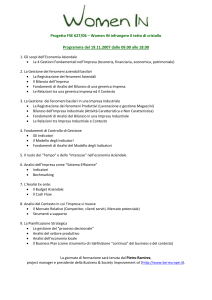
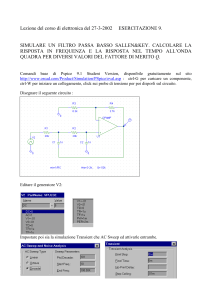
Confronto della BER in diversi schemi di
segnalazione digitale
31
Fondamenti di TLC - Prof. M. Barbera
7 – Influenza dei disturbi sui sistemi di
comunicazione [parte 3]
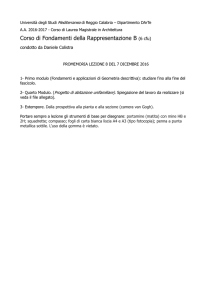
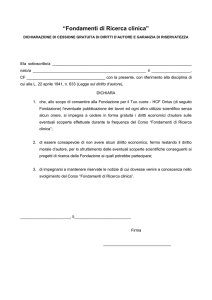
BER per modulazioni multilivello
Per sistemi MPSK:
E
π
Pe ≤ Q 2 b (log 2 M )sin 2
N0
M
Per sistemi QAM:
E
Pe ≤ 4Q 2 b
N0
η M
ηM
M
- 4 dB
16 QAM
- 6 dB
32 QAM
- 8.5 dB
64 QAM
- 10.2 dB
128 QAM
- 13.3 dB
256 QAM
32
16