MOTORI ELETTRICI LINEARI
Il panorama dei motori lineari
disponibili in commercio,
criteri di scelta,
studi ed esempi di applicazione
1
Introduzione
I motori lineari sono motori elettrici che producono il moto
direttamente in forma lineare.
“srotolando su un
piano i tradizionali
motori rotativi”
3
Introduzione
Alcuni parametri da tenere in considerazione con i motori lineari:
• La corsa
corsa
• Porre attenzione agli ingombri
impegnati dal motore durante
il moto
4
Principi di funzionamento
Introduzione
I principi di fisici alla base del funzionamento sono gli stessi dei motori
rotativi.
I principi di
funzionamento
dei motori lineari
Riluttanza variabile
Riluttanza fissa
Motori passo
Motori asincroni
Motori sincroni
5
Principi di funzionamento
Motori passo (LSTM)
Come nei motori passo rotativi, all’eccitazione di ogni fase, il sistema si
dispone per offrire alle linee di flusso del campo magnetico la riluttanza
minore.
Si ottiene così un moto incrementale ed ogni incremento si definisce
passo
t = passo della dentatura
m = numero di fasi (3 o 4)
p = passo = t / 2m
Struttura dentata ferromagnetica
o magneti permanenti (MP)
6
Principi di funzionamento
Motori passo (LSTM)
Eccitando le fasi “1”
7
Principi di funzionamento
Motori passo (LSTM)
Eccitando le fasi “2”
8
Principi di funzionamento
Motori passo (LSTM)
Eccitando le fasi “2”
9
Principi di funzionamento
Motori passo (LSTM)
La struttura elettromagnetica
Motore IBRIDO in cui nell’armatura è presente un magnete permanente
NORMALE
IBRIDO
• vantaggio
- presenza di un campo magnetico permanente
Æ conservare la posizione anche con motore spento
• svantaggi - aumento dei costi e della forza d’attrazione
10
Principi di funzionamento
Motori passo (LSTM)
• A meno di non richiedere prestazioni molto spinte si ha
controllo in catena aperta (semplicità e insensibilità ai disturbi)
• Prestazioni statiche e dinamiche superiori possono essere ottenute
sai inserendo un sensore di posizione per realizzare un anello di
retroazione (catena chiusa) sia con tecniche di microstepping
Energia
Logica di
comando
+
_
Generatore
impulsi di
comando
Convertitore di
alimentazione
Movimento
Motore
stepper
Sensore di
posizione
11
Principi di funzionamento
Svantaggi
Svantaggi
Motori passo (LSTM)
• Moto incrementale Æ Vibrazioni e Rumorosità
• Instabilità ad alcune frequenze degli impulsi di alimentazione per
possibili fenomeni di risonanza meccanica col carico
• Il rapporto tra traferro e passo deve essere ridotto
Æ per avere alta risoluzione
Æ traferro di decimi di mm,
Æ difficoltà nella realizzazione meccanica di lunghe corse
• Prestazioni non elevate né velocità né spinta
• Forza normale d’attrazione circa 7-10 volte la spinta massima
12
Principi di funzionamento
Motori passo (LSTM)
Applicazioni
Applicazioni
•
•
•
•
•
•
•
•
Orologeria,
macchine a controllo numerico,
macchine per l’industria tessile,
fotocopiatrici,
plotter,
stampanti,
sistemi di controllo ottico,
strumenti elettromedicali
Esistono anche motori passo capaci di
muoversi all’interno di un piano
(motori X-Y)
Applicazione tipica: plotter
13
Principi di funzionamento
Motori ad induzione (LIM)
Motori ad induzione
o asincroni
Indotto
Armatura
Primario con avvolgimenti
trifase o bifase
Secondario di
materiale conduttore
14
Principi di funzionamento
Motori ad induzione (LIM)
Le fasi del PRIMARIO
vengono opportunamente
eccitate da correnti
sinusoidali
Indotto
Armatura
15
Principi di funzionamento
Motori ad induzione (LIM)
Si produce così un campo
magnetico traslante con
velocità vs= 2 f t
f = Frequenza di
alimentazione [Hz]
t = semipasso
polare [m]
Indotto
Armatura
16
Principi di funzionamento
Motori ad induzione (LIM)
Correnti indotte
il moto relativo tra
l’INDOTTO ed il campo
magnetico traslante
provoca nell’indotto una
f.e.m che genera le
“correnti indotte”
Indotto
Armatura
17
Principi di funzionamento
Motori ad induzione (LIM)
Le correnti indotte
generano a loro volta un
altro campo magnetico
che interagisce con
quello generato dal
primario inseguendolo
Campo magnetico
Indotto
indotto
Armatura
18
Principi di funzionamento
Motori ad induzione (LIM)
Particolarità del motore lineare asincrono
• il motore non può funzionare in condizione di sincronismo cioè se
c’è coincidenza tra la velocità del campo traslante e quella
dell’indotto (Asincrono)
• la parte indotta non deve essere alimentata per cui il secondario
può essere costituito dall’oggetto stesso che si vuole muovere
[Costruzione aperta]
Secondario
Primario
19
Principi di funzionamento
Motori ad induzione (LIM)
• Prestazioni dei LIM per uso industriale
Spinte > 2000 N
[con bassi valori del Duty Cycle ]
Accelerazioni di 1 g
Velocità elevate fino a 50 m/sec
• Assenza di MP Æ costi ridotti nella realizzazione di lunghe corse
• Ottimi per sistemi di trasporto civile ed industriale
La spinta è indipendente
dal contatto ruota rotaia
20
Principi di funzionamento
Svantaggi
Svantaggi
Motori ad induzione (LIM)
• Il controllo risulta complesso
Per realizzare il controllo in posizione è necessario il controllo
di tipo vettoriale delle correnti nelle fasi del primario
• Durante il funzionamento può esserci un’elevata forza normale
repulsive o attrattive
DSLIM
• Il rendimento è peggiore rispetto ai motori sincroni
• ed a parità di spinta anche l’ingombro è maggiore
21
Principi di funzionamento
Motori ad induzione (LIM)
Motore asincrono prodotto
da Normag - Baldor
22
Principi di funzionamento
Motori sincroni (LSM)
3
Avvolgimento trifase
N
S
N
S
Pista con magneti permanenti
S
2
N
1
23
N
S
Principi di funzionamento
Motori sincroni (LSM)
3
S
N
S
N
S
N
S
Flusso magnetico
concatenato con
la prima spira
2
N
1
ϕ c1
dϕ c1
Derivata del
flusso magnetico
concatenato con
la prima spira
dl
24
Principi di funzionamento
Motori sincroni (LSM)
ϕ c1
La spinta che si esercita
sull’avvolgimento è
esprimibile secondo
l’espressione:
ϕc2
ϕ c3
3
F = ∑ Iq
q =1
dϕ c1
dϕ c q
dl
dl
Corrente
all’interno
della fase q
dϕ c 2
dl
dϕ c3
dl
Derivata
del flusso
concatenato
con la fase q
25
60°
120°
180°
240°
300°
360°
[ gradi elettrici ]
Principi di funzionamento
Motori sincroni (LSM)
ϕ c1
Alternando le fasi ed i segni
delle correnti all’interno delle
tre bobine si può ottenere
una spinta costante
3
F = ∑ Iq
dϕ c1
q =1
dl
dϕ c q
dl
26
60°
120°
180°
240°
300°
360°
[ gradi elettrici ]
Principi di funzionamento
Motori sincroni (LSM)
Particolarità del motore lineare sincrono [ Brushless ]
• Per comandare la commutazione è necessario conoscere la
posizione del movente rispetto al campo magnetico ed è
quindi necessario un sensore di posizione
• ad effetto Hall
• sfruttando l’Encoder usato come sensore di posizione
per il controllo in retroazione
• Le correnti nell’avvolgimento possono essere sia
trapezoidali che sinusoidali (migliore in termini di inerzia
potenza e peso)
27
Principi di funzionamento
Svantaggi
Svantaggi
Motori sincroni (LSM)
• Costo elevato dei magneti permanenti
• In alcune forme costruttive è presente un’elevata forza d’attrazione
(circa 10-15 volte la spinta massima)
• Necessità di proteggere con gusci e soffietti i magneti da polveri e
trucioli ferromagnetici (macchine utensili).
28
Principi di funzionamento
Motori sincroni (LSM)
Vantaggi
Vantaggi
Per una serie di aspetti positivi i motori sincroni sono di gran lunga
i più diffusi ciò è testimoniato anche della massiccia presenza di
prodotti disponibili in commercio
• Elevate prestazioni dinamiche
velocità fino a 5 - 7 m/sec
accelerazioni anche superiori a 20 g
spinte massime anche di 15 kN
• Dolcezza del moto
• Qualità nel posizionamento [risoluzione, accuratezza, ripetibilità]
• Il sistema di controllo e alimentazione simile ed integrabile con
quello dei brushless rotativi che ormai è da considerarsi uno
standard industriale
29
Principi di funzionamento
Motori sincroni (LSM)
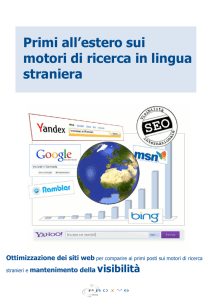
I valori di corsa e spinta dei motori sincroni rispondono pienamente alle
esigenze delle macchine automatiche
10000
Spinta in N
LIM
1000
100
Sistemi di
movimentazione
industriale
10
1
LSM
Asservimenti di
posizione
LSTM
0.01
Corsa in m
0.001
0.01
0.1
1
10
100
1000
30
Forme costruttive dei motori sincroni
Morfologie costruttive dei motori lineari
Un’altra fondamentale classificazione dei motori lineari può essere
effettuata analizzando le diverse forme costruttive:
Ogni struttura ha delle caratteristiche peculiari, generalmente si può
distinguere tra:
• Motori MONOLATERI
• Motori BILATERI
• Motori TUBOLARI
31
Forme costruttive dei motori sincroni
Motori monolateri (IRONCORE)
La struttura monolatera essendo
aperta provoca una dispersione
del campo magnetico
Per concentrare le linee di flusso del campo magnetico concatenato
con le spire del movente si aggiunge un “nucleo ferromagnetico”
ϕ c onc. ⇒ F
Massa mov
32
Forme costruttive dei motori sincroni
Motori monolateri (IRONCORE)
Vantaggi
•
Si realizzano così i più elevati valori di spinta
(15 kN con raffreddamento forzato)
• Buona possibilità di dissipare il calore prodotto
perché la grande superficie di scambio termico
per ventilazione forzata data dal moto generalmente rapido
• Modularità della corsa
Svantaggi
• Nucleo ferromagnetico Æ
• Forza d’attrazione
• Maggiore inerzia del movente
Applicazioni • dove sono necessarie alte spinte e precisione
macchine utensili [Siemens, Kollmorgen ]
33
Forme costruttive dei motori sincroni
Motori bilateri (IRONLESS)
L’avvolgimento e disposto tra due piste
affacciate di magneti permanenti
• Il flusso si concatena quasi
totalmente con le spire
• Non si può inserire un nucleo
ferromagnetico
34
Forme costruttive dei motori sincroni
Motori bilateri (IRONLESS)
Vantaggi
Svantaggi
Applicazioni
• Simmetria
del campo magnetico
• Ottimo sfruttamento del flusso magnetico
• Assenza di forze d’attrazione
• Massa ridotta del movente (resine epossidiche)
• Struttura chiusa Æ Difficoltà di smaltimento termico
Æ Spinte non superiori a 2 kN
• Dove non sono necessarie alti valori della spinta ma
movimenti rapidi e precisi
• Pick and Place e robot cartesiani
35
Forme costruttive dei motori sincroni
Motori cilindrici (TUBULAR)
36
Forme costruttive dei motori sincroni
Motori cilindrici (TUBULAR)
I motori della Sulzer LinMot P
I motori della ThrustTube
37
Forme costruttive dei motori sincroni
Motori cilindrici (TUBULAR)
Vantaggi
Svantaggi
Applicazioni
• Ottimo sfruttamento del flusso magnetico
• Eccellente comportamento termico
facilità di raffreddamento
ventilazione forzata durante il moto
• Bassi costi di costruzione dell’avvolgimento
• Lunghezza della corsa limitata
• Effetti di bordo Æ La spinta può calare con la
fuoriuscita dello stelo
• Applicazione molto veloci su corse medio brevi
• Pick and Place, spingitori, tastatori
38
Forme costruttive dei motori sincroni
Morfologie costruttive dei motori lineari
Confronto tra le
prestazioni in termini
di spinta delle varie
morfologie costruttive
di motori sincroni.
Da un’indagine in cui
sono stati considerati
più di 200 motori di
10 tra le maggiori
ditte produttrici 39
Metodi di selezione e dimensionamento
40
Dimensionamento elettrico del motore
Le prestazioni di ogni macchina elettrica sono limitate dalla capacità di
espellere il calore prodotto per effetto Joule (perdite nel rame)
Infatti se la temperatura del motore supera un certo limite ( ~150°C ) si
danneggia il materiale isolante dell’avvolgimento e si smagnetizzano i MP.
F = I ⋅Kf
PJoule
PJoule = R ⋅ I 2
Condizioni fondamentali
per il dimensionamento
elettrico
Da catalogo
FCont > FRMS
FPeak > FMAX
R ⋅ FRMS
=
2
Kf
2
PJoule < Pnom
41
Caratteristiche dell’applicazione
Dimensionamento elettrico del motore
Flusso di energia
E. elettr..
Rete elettrica
Regolazione
En.elettr.
Sistema di
alimentazione
En. el.Æ En. mec.
Motore
Azionamento
I costruttori oltre al motore
forniscono anche il sistema
di alimentazione in tal caso
sono disponibili da catalogo
e vanno verificate le curve
caratteristiche
(Velocità vs Forza)
42
Modello di dimensionamento meccanico
Equazioni di equilibrio
Fmotore = Festerne ⋅ tˆ + F peso ⋅ tˆ + Fattrito + Fbil .stat . + Finerzia
Spinta richiesta al motore
Canoni fondamentali per
il dimensionamento
meccanico
Finerzia = M tot ⋅ a
Riduzione delle masse
Ottimizzazione delle leggi di moto
(aMax e aRMS)
43
Modello di dimensionamento meccanico
Il procedimento di
calcolo è
INEVITABILMENTE
iterativo !!
Ottimizzazione della legge di moto
- rispetto dei vincoli di posizionamento
- minimizazare aRMS e aMAX
Motore di primo tentativo
Definire la legge di moto
M totale =
M pagante + M movente
Equazioni di equilibrio
Scelta di altro motore
o della taglia superiore
o di un altro costruttore
o di un'altra tipologia
Calcolo di FRMS e FMAX
Verifica:
FRMS < Fcont
FMAX < FPeak
Ok
Finerzia = M tot ⋅ a
No
Scegliendo un motore di
taglia maggiore aumentano
la Fcont e la F Peak ma
aumenta anche la massa
del movente ed, a parità di
accelerazione, crescono la
Frms e Fmax
44
Organi ausiliari alla movimentazione lineare
La movimentazione lineare necessita di un gran numero di apparati
accessori
Questi svolgono un ruolo fondamentale in fase di dimensionamento,
tanto è vero, non si può in alcun modo trascurare la loro influenza
sulle equazioni di equilibrio.
• Telaio e della slitta traslante (massima cura nel disegno)
• Sistema guide lineari
• Sensore di posizione per il sistema controllo
• Sistema di governo e guida dei cavi
• Eventuale sistema di raffreddamento
• Eventuale sistema di bilanciamento statico
45
Guide lineari
Le tolleranze imposte sul traferro e dal sensore di retroazione impongono
strette tolleranze dimensionali e rigidezza strutturale questo impone
particolare cura nella progettazione
• della Struttura del telaio e della slitta
• del Sistema guide lineari
Guide
profilate
Guide a circolazione di sfere
o di rulli:
Possono costituire un limite
al valore massimo dell’acc.
Va svolto un intervento di
ingrassaggio ogni in media
ogni 100 Km di esercizio
Fattr
Massa guide
Manicotti
a sfere
Guide di
precisione
46
Sensori di posizione
Ci sono differenti tipologie di encoder nel campo dei motori lineari:
• Encoder ottici
predominanti nelle applicazioni industriali
permettono un’altissima risoluzione [20 µm – 0.1 µm]
accuratezza maggiore rispetto alle altre tipologie
47
Sensori di posizione
• Encoder magnetici (magneto-resistenze o ad effetto di Hall)
semplicità
ridotta sensibilità allo sporco e alle vibrazioni
costo ridotto
48
Cavi e sistemi guidacavi
Quasi la totalità dei motori lineari presente in commercio prevede che la
parte in moto sia alimentata.
L’affidabilità dei cavi di alimentazione e di retroazione è fondamentale
Potenza ↑ Æ Voltaggio ↑ Æ Sezioni dei conduttori ↑ Æ Stress flessione ↑
Sono necessari cavi speciali high flex long life
Possono costituire una seria limitazione alle accelerazioni massime
49
Sistemi di raffreddamento
L’evacuazione del calore prodotto negli avvolgimenti è cruciale.
Esistono tre tipologie dei sistemi di raffreddamento:
• Scambiatore alettato
Generalmente in alluminio,
Al di sopra di un certo valore della velocità del movente lo
scambio termico avviene per convezione forzata
• Raffreddamento forzato ad aria
Un flusso d’aria compressa transita nell’avvolgimento e si
disperde nell’ambiente
• Raffreddamento a fluido (acqua, olio)
E’ la più efficace ma molto rara
esempio Siemens per macchine utensili tre circuiti di
raffreddamento (avvolgimento, magneti, precisione)
50
Sistemi per il bilanciamento statico
Per loro natura i motori lineari non sono in grado di contrastare il moto
retrogrado in condizione di power failure.
Nel caso il movimento non sia orizzontale e’ necessario prevedere un
sistema di bilanciamento statico o di frenatura spontanea
• Bilanciamento a contro-massa
usato solo negli ascensori
• Bilanciamento a molla
molto vantaggioso per l’elevato rapporto tra forza e massa
• Bilanciamento pneumatico
attuatore pneumatico a semplice effetto + valvola regolatrice
della pressione
51
Due configurazioni commerciali
I motori lineari sono presenti sul mercato in due configurazioni
• Configurazione minima (solo statore e movente)
consente la massima libertà in fase di progettazione per
l’ottimizzazione delle prestazioni
configurazione
minima
52
Due configurazioni commerciali
I motori lineari sono presenti sul mercato in due configurazioni
• configurazione integrata (completa di tutti gli organi ausiliari)
semplifica e rende la progettazione più affidabile ed economica
Movente
Fine corsa
Sensore di posizione
Catena portacavi
Rotaia della
guida profilata
Magneti
permanenti
configurazione integrata
53
Alcuni parametri chiave
nella progettazione
54
Alcuni parametri chiave
In questa sezione verrà fornita l’identificazione e la rappresentazione
grafica di alcuni parametri caratteristici dei motori lineari
Ciò costituisce:
• un passo fondamentale nel crearsi una sensibilità sui parametri che
intervengono in modo più deciso nel dimensionamento e nella scelta di
un motore lineare
• uno strumento di valutazione e di confronto
9 sia per orientarsi nella scelta tra le differenti soluzioni costruttive
9 sia nella selezione di singolo prodotto specifico
55
Alcuni parametri chiave
I parametri più importanti sono:
• l’accelerazione massima
• l’accelerazione continua
• il rapporto tra forza continua
e forza d’attrazione
Accmax =
Acccont
Fmax
Massa movente
Fcont
=
Massa movente
K Attr .
FAttr
=
FCont
Inoltre, verrà definita la Sensibilità alla variazione del carico pagante
56
L’accelerazione continua
Accelerazione continua
Monolateri e Bilateri
Forza continua in N
2000
1800
Mon. Not cooled
1600
Mon. Water cooled
1400
Bilateri
1200
1000
800
600
400
200
Massa movente (kg)
0
0
1
2
3
4
5
6
7
8
9
10
57
L’accelerazione continua
I dati riportati nei diagrammi precedenti sono il risultato di
un’indagine nella quale sono stati esaminati circa 230 motori
monolateri e bilateri di 8 case costruttrici.
Forma costruttiva
Accelerazione
continua
[ m/sec2 ]
Accelerazione
continua
[g]
Motori bilateri
187
19
161
16.5
91
9.3
Motori monolateri
raffreddati ad acqua
Motori monolateri non
raffreddati
58
L’accelerazione continua
59
Comportamento con carichi utili
Accelerazioni continue di motori di tipologie differenti con valore
della spinta continua simile,in funzione della massa trasportata in
un moto orizzontale.
Casa costruttrice
Tipologia
Massa del
movente [Kg]
Forza
continua [N]
Kollmorgen
IL 24 -100
Bilatera
1.42
450
Monolatera water
cooled
3.6
425
Monolatera non
raffreddato
9.1
475
Anorad
LCD-T-3-P
Anorad
LFA-S-3-P
60
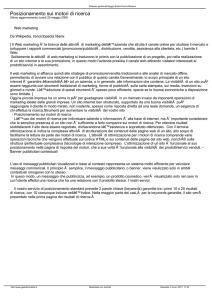
Comportamento con carichi utili
Sensibilità all'aumentare della massa del carico
350
Accelerazione (m/sec^2)
300
Motore bilatero
Motore monolatero water cooled
250
I motori monolateri
sono meno sensibili
alla variazione del
carico utile rispetto a
quelli bilateri.
Motore monolatero non raffreddato
200
150
100
50
0
0
1
2
3
4
5
6
7
8
9
10 11 12 13 14 15 16 17 18 19 2 0 21
Massa del carico (kg)
61
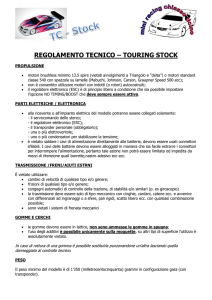
Comportamento con carichi utili
Va tenuto in conto anche quanto il motore sia più o meno sensibile
al variare dell’entità della massa da movimentare
Sensibilità all'aumentare della massa del carico
Accelerazione (m/sec^2)
60
1.38 Kg, 75 N, 54m/sec^2
2.10 Kg, 97 N, 46m/sec^2
50
40
30
20
10
Massa del carico (kg)
0
0
1
2
3
4
5
6
7
8
62
Vantaggi e limitazioni
nell’utilizzo di motori lineari
63
I vantaggi nell’utilizzo di motori lineari
Elevate prestazioni intrinseche
elevate velocità ( > 10 m/sec )
elevate accelerazione ( > 20 g)
elevata precisione ed accuratezza di posizionamento
Miglioramento delle prestazioni del sistema
Consente la filosofia progettuale “DIRECT DRIVE”
Æ Riduzione e semplificazione della catena cinematica
• Consente una maggiore flessibilità operativa
(non ho rigidi meccanismi ma dispositivi programmabili)
• Eliminazione delle inerzie, dei giochi, dell’elasticità e
degli effetti d’usura degli organi della catena cinematica
• Aumento dell’affidabilità
64
Le difficoltà legate all’utilizzo di motori lineari
¾
Limitazioni tecniche
• Le spinte esercitate dai motori lineari sono inferiori ai dispositivi
tradizionali [ potenza e forza specifica ]
• Non essendo presente un riduttore di velocità il motore sente
direttamente tutto il carico
¾
Limitata diffusione
• La scarsa conoscenza delle reali potenzialità dei motori lineari
¾
Limitazioni economiche
• Costo dei materiali (MP)
• Il mercato è ancora molto ristretto
Æ non si possono applicare economie di scala
Costi elevati
65
Le applicazioni
Il primo motore lineare
è stato costruito da Wheatstone
nel 1845
66
Le applicazioni
I motivi del recente sviluppo dei motori elettrici
Sviluppo di materiali sempre più performanti:
magneti permanenti
processi di sinterizzazione delle polveri
isolanti adatti a sopportare alte temperature
Sviluppo dell’elettronica di potenza
Rapida evoluzione nella componentistica elettronica
Applicazione di strategie di controllo innovative
Metodologie di progettazione più raffinate (F.E.M.)
Affermazione di nuove aree di applicazione (industria elettronica)
Richiesta di motori direct drive ad alta velocità e ad alta coppia/spinta
67
Applicazioni industriali dei motori lineari
Capacità movimentare con estrema velocità e precisione oggetti di massa
ridotta
Sviluppati nella Silicon Vallley per componenti elettronici, chip schede
telefoniche, …
Per la loro flessibilità operativa e precisione sono molto usati nelle
macchine utensili
tavole porta-pezzo taglio e saldatura laser, fresatrici, macchine per la
lavorazione del legno, …
Per la loro flessibilità operativa e semplificazione dell’architettura delle
macchine Æ Packaging
GD pacchetti di sigarette, imballaggio pannolini, glassatura delle
dolciumi, test, alimentatori, …
68
Applicazioni industriali dei motori lineari
Esame di tre casi applicativi scelti per la loro:
• forte rappresentatività per il mondo delle macchine automatiche
• e poiché consentono di illustrare due contesti progettuali radicalmente
diversi:
1°
Alta
dinamica
2°- 3°
Moderata
dinamica
Progettazione
ad hoc
Progettazione
ordinaria
Motore in
configurazione
minima
Flessibilità
Sistema integrato
Economicità
69
1°
Applicazione ad alta dinamica
Tipologia: Dispositivo sollevatore
Soluzione attuale:
• manovellismo di spinta con motoriduttore
brushless
• corsa di 227 mm
• ritmo operativo pari a 160 battute/minuto
Evoluzione oggetto dello studio
• piattello direttamente azionato da un motore lineare;
• incrementare il ritmo operativo a 250 battute/minuto
70
1°
Applicazione ad alta dinamica
Legge di moto:
Ottimizzazione con obiettivo: aRMS minimo
Periodo:
240 msec
Corsa:
277 mm
Velocità massima:
6 m/sec
Valore massimo accelerazione: 24.2 g
Valore efficace accelerazione: 12.32 g
71
Applicazione ad alta dinamica
1°
Sistema di guide lineari: Guida profilata
(carrello fisso e rotaia opportunamente alleggerita)
Sistema di bilanciamento statico: Pneumatico
Massa traslante (ridotta al minimo): 1,5 Kg (escluso movente)
Tipo di motore scelto: LSM brushless
Morfologia costruttiva: Bilatero ( IRONLESS )
Casa costruttrice: KOLLMORGEN
Modello: IL 24-100-A4
Massa del movente: 1.42 kg
Forza Continua: 450 N
[ Frms = 400 N; 89% di F cont ]
Forza Peak: 1600 N
[ Fmax = 585 N; 37% di F peak ]
72
2°
Applicazione con dinamica moderata
Tipologia:
Movimentazione delle pistole per
deposizione colla a caldo
Soluzione attuale:
• manovellismo di spinta
con brushless rotativo
• corsa 127 mm
• tratto a velocità costante
(0.65 m/sec)
• ritmo operativo pari a 120 bpm
Cordone trasversale
Cordone
longitudinale
73
2°
Applicazione con dinamica moderata
Evoluzione oggetto dello studio:
• semplificare l’architettura della macchina
• aumentare la flessibilità operativa
In questo caso non è possibile una
preliminare ottimizzazione della massa
movente poichè il maggiore carico
inerziale è costituito dalle pistole per
la colla
La legge di moto è stata ottimizzata
usando il metodo Monte Carlo
modificato con obiettivo di ARMS
Posizione [mm vs sec]
Velocità [m/sec vs msec]
Acceleraz. [mm/sec^2 vs msec]
74
2°
Applicazione con dinamica moderata
Tipo di motore scelto: Sistema integrato con motore LSM
Morfologia costruttiva: Bilatero ( IRONLESS )
Casa costruttrice: TRILOGY
Modello: Stage T3E - 3poli
Massa del movente: 2.8 kg
Forza Continua: 130 N
[ Frms = 90 N; 70% di F cont ]
Forza Peak: 540 N
[ Fmax = 243 N; 44,6% di F peak ]
Costo stimato: 5.000 $
Stage Trilogy T3E
75
Applicazione con dinamica moderata
3°
Tipologia:
Spingitore per una astucciatrice a trasferimento sincrono intermittente
Nastro
adduzione prodotti
Asta
spingitore
Camma solidale
all'albero Master
Prodotti
Nastro
adduzione scatole
76
3°
Applicazione con dinamica moderata
Soluzione attuale:
Questa stazione operativa costituisce attualmente il collo di bottiglia
per l’innalzamento del ritmo produttivo della macchina
• Vibrazioni
• Difficoltà nel controllare la legge di moto per migliorare la
dinamica dell’urto con il prodotto
Ritmo produttivo: 80 btm
escursione: 400 mm
massa prodotto: 1Kg
450.00
400.00
Posizione mm vs sec
Evoluzione oggetto dello studio
• spingitore direttamente azionato
da un motore lineare;
• incrementare il ritmo operativo;
350.00
300.00
250.00
200.00
150.00
100.00
50.00
0.00
0.00
0.10
0.20
0.30
0.40
Tempo
0.50
0.60
0.70
77
0.80
3°
Applicazione con dinamica moderata
Tipo di motore scelto:
Sistema integrato con motore LSM
Morfologia costruttiva:
Tubolare ad albero fisso
Casa costruttrice: ThustTube
Modello: Linear Drive TB 3804
Massa movente: 2,9 Kg
Forza Cont: 104 N
F rms: 84,4 N [81% Fcont]
Forza Peak: 1584 N
Forza Max: 195 N [12% Fpeak]
78
Valutazioni conclusive
Confrontando le necessità specifiche delle macchine automatiche per il
packaging e l’assemblaggio con le potenzialità dei motori lineari emerge:
I motori lineari devono ancora evolvere per soddisfare le esigenze delle
macchine automatiche
• Molti motori sono sovrabbondanti per accuratezza di posizionamento
e rigidezza ma ancora troppo ingombranti e pesanti.
• Mercato ancora giovane Ænon c’è stata ancora né una selezione né
una specializzazione, manca una standardizzazione dei datasheet
• Molti attuatori sono ottimizzati per esigenze di macchine di altre
famiglie di impiego (macchine utensili), mentre una progettazione più
orientata porterebbe una riduzione di ingombri, costi e migliori
prestazioni dinamiche
79
Valutazioni conclusive
Alcuni auspicabili miglioramenti dell’offerta commerciale:
• Per alti ritmi operativi e corse limitate
sviluppare motori “moving magnet”
Infatti, non alimentando la parte in moto,
si elimina il problema del trasporto
e dell’usura dei cavi.
• Evolvere i motori lineari di tipo asincrono oggi scarsamente presenti
sul mercato ma che sono sicuramente i più economici
80
Valutazioni conclusive
Aspetti e raccomandazioni riguardanti la progettazione:
L’applicazione di un motore lineare non si può limitare alla semplice
sostituzione di una parte di una macchina ma spesso e necessaria una
completa riprogettazione del mezzo operativo
• sia per sfruttare a pieno i benefici di tale tecnologia nell’organizzazione
funzionale della macchina
• sia per motivazioni di ordine tecnico
• riduzione delle masse
[FEM, materiali innovativi]
• curare l’ottimizzazione delle leggi di moto
• irrigidimento della struttura [sistema di retroazione, forze di inerzia]
81
Bibliografia
Testi
• E.R. Laithwaite: “Induction machines for special porpouses”, Ed. Newnes Lim,
London (UK),1966
• S.A.Nasar, I. Boldea: “ Linear motion electric machines”, Wiles & Sons, New
York (USA), 1976
• M.Jufer: “Trasducteurs Électromécaniques”, Ed Giorgi, St-Saphorin (CH), 1979
• M. Poloujadoff: “The theory of linear induction machinery”, Clarendon Press,
Oxford (UK), 1980
• S.A.Nasar, I. Boldea: “ Linear motion electromagnetic systems”, Wiles & Sons,
New York (USA), 1985
• J.F.Gieras “Linear induction drives”, Clarendon Press, Oxford (UK), 1993
• A. Basak:”Permanent – magnet DC linear motors”, Clarendon Press, Oxford
(UK), 1996
82
Bibliografia
Testi
• I. Boldea, S.A.Nasar: “ Linear electric actuators and generators”, Cambridge
University Press (UK), 1997
• J.F. Gieras, Z.J. Piech: “Linear synchronous motor”, CRC Press (USA), 2000
Articoli
• M. Andriollo, A.Di Geraldo, (Componenti industriali Publitec): “Realizzare
movimenti rettilinei con guide elettromagnetiche” N. 46 - 47 – 48 1999-2000
• F. Lotti, G. Vassura, A. Zucchelli, M. Salmon: “ Selection of linear motors for highspeed packaging machines”, IEEE/ASME International Conference on Advanced
Intelligent Mechatronics (AIM'01) - 2001
• F.Lotti: “I motori lineari e le macchine automatiche”: www.opifici.it, Giu 2001
• F.Lotti: “Dimensionamento e selezione dei motori lineari per macchine di
confezionamento ad alte velocità”: www.opifici.it Set 2001
• F.Lotti: “Valutazione dell’applicabilità dei motori lineari nella movimentazione di
uno spingitore di una macchina automatica per il confezionamento”:
83
www.opifici.it, Ott. 2001
Bibliografia
Siti Internet
84
Bibliografia
Siti Internet
85
Bibliografia
Siti Internet
86
Disclaim - I dati riportati hanno scopo puramente esemplificativo pertanto
possono discostare dai reali dati tecnici dei prodotti commerciali illustrati.
88