Capitolo 5
Azionamenti elettronici PWM
5.1
Azionamenti elettronici di potenza
I motori in corrente continua vengono tipicamente utilizzati per imporre al carico dei cicli di lavoro, nei quali
può essere fermo, funzionare a velocità costante, accelerare o decelerare per portarsi ad una nuova veloctità.
Questo funzionamento del motore è tipico nelle applicazioni in cui è richiesto il controllo di posizione.
Per raggiungere la citata flessibilità, il motore viene pilotato per mezzo di un azionamento elettronico di
potenza, il driver, il quale è in grado di trasferire energia dalla rete elettrica verso il motore secondo un comando
imposto dall’esterno (ad esempio da parte del controllore). Controllando il trasferimento dell’energia si è in grado
di imporre al motore la velocità di rotazione desiderata.
Esistono vari tipi di driver per motori in corrente continua, qui vedremo i chopper. Per introdurre il
funzionamento dei chopper si consideri il circuito di figura 5.1 in cui per mezzo della resistenza R si vuole
regolare la temperatura di in ambiente disponendo di una sorgente a tensione costante V . Se la resistenza viene
collegata direttamente all’alimentazione, l’enerigia prodotta dal resistore è pari a V 2 /R. Se è maggiore di quella
dissipata dall’ambiente che si vuole riscaldare si verifica un aumento di temperatura.
Com.gate
V
Vr
R
Vr
T
a)
b)
Figura 5.1: a) schematizzazione di un chopper b) seguenza di comando di gate e tensione applicata alla resistenza
Una possibile soluzione consiste nel collegare la resistenza all’alimentazione in modo discontinuo utilizzando
ad esempio un GTO. Il collegamento discontinuo può essere realizzato comandando in conduzione oppure no il
GTO. La somma del tempo ton in cui la resistenza è alimentata e del tempo tof f in cui la resistenza è scollegata
dall’alimentazione è detto periodo T , mentre il rapporto fra il tempo in cui il tristore è in conduzione e il periodo
T viene detto duty cycle k, per la sua definizione 0 ≤ k ≤ 1.
Il valore medio sul periodo T della tensione applicata alla resistenza è
Vm =
V ton + 0tof f
=Vk
T
50
CAPITOLO 5. AZIONAMENTI ELETTRONICI PWM
per cui, tenendo fisso il periodo T e variando k si è in grado di imporre sul resistore una tensione media minore
di V . L’energia dissipata sul resistore e impiegata per riscaldare l’ambiente in questo caso è
E=
(V k)2
R
per cui variando il duty cycle k si cambia l’energia trasmessa dal resistore all’ambiente e si è quindi in grado
di controllare la temperatura. Si sceglie un valore di k tale che l’energia dissipata sul resistore eguagli quella
persa dall’ambiente verso l’esterno. La tecnica illustrata è detta PWM (Pulse Width Modulation) in quanto la
regolazione avviene modificando la lunghezza del periodo ton rispetto al periodo T .
La frequenza F = 1/T è un indice delle escursioni di temperatura all’interno dell’ambiente. Infatti per
basse frequenze di funzionamento si alternano intervalli di tempo (ton ) in cui la temperatura cresce, e intervalli
(tof f ) in cui la temperatura scende, il tutto attorno al valore medio desiderato. L’ampiezza dell’escursione
di temperatura dipende ovviamente anche dalla capacità termica dell’ambiente. L’ampiezza dell’oscillazione di
temperatura è inversamente proporzionale alla frequenza di funzionamento F del tristore. La massima frequenza
di funzionamento dipende dalle caratteristiche del circuito che deve essere alimentato e dalla tecnologia con cui
è realizzato la valvola elettronica di potenza (in questo caso il GTO) con cui si parzializza il flusso di energia
verso l’utilizzatore.
5.1.1
I chopper
Questi dispositivi sono convertitori DC-DC, generano una tensione continua da una sorgente di tensione continua. Sono dotati di valvole elettroniche di potenza che permettono di trasferire, secondo le esigenze, l’energia
dalla sorgente all’utilizzatore. Le valvole elettroniche possono essere di vario tipo (transistor di potenza, MOSFET, GTO) in funzione della potenza in gioco e della frequenza di switching richiesta. Nei disegni presentati le valvole saranno rappresentate con il simbolo del transistor, in seguito verranno sottolineati i campi di
applicazione dei vari tipi di valvola elettronica.
Ia
Ia
Q
V
Dr
V
Vcem 6
a)
Vcem 6
b)
c)
Figura 5.2: Chopper step-down: a) circuito, b) fase di on, c) fase di off
In figura 5.2.a è riportato il funzionamento del chopper più elementare, atto a pilotare un motore in corrente
continua. Questo tipo di circuito viene detto ad 1 quadrante (il primo nel piano corrente-tensione) in quanto la
corrente erogata dal convertitore assume il verso concorde con la tensione. Il convertitore è in grado di applicare
al motore la tensione media Va = V k in cui V tensione di alimentazione del chopper, k duty cycle. Questi tipi
di convertitori sono in grado di generare una tensione minore di quella di alimentazione, vengono perciò detti
chopper step-down.
In questo circuito è stato introdotto il diodo di ricircolazione Dr che evita danneggiamenti del transistor
durante la commutazione e permette il ricircolo della corrente sugli avvolgimenti del motore durante la fase
off, garantendo un cammino alla corrente che li percorre. Durante questa fase viene dissipata parte dell’energia
immagazzinata nell’induttanza del motore. Nella stessa figura sono riportati gli schemi elettrici di funzionamento
del convertitore, in (b) quando il transistor è in conduzione e in (c) quando il transistor non lo è. Per lo studio
P. Righettini, R. Strada
c
Azionamenti dei sistemi mecccanici - Appunti delle Lezioni 51
CAPITOLO 5. AZIONAMENTI ELETTRONICI PWM
A
6
1.5
a
1
b
0.5
c
-
0
2
4
6
8
10
12
KHz
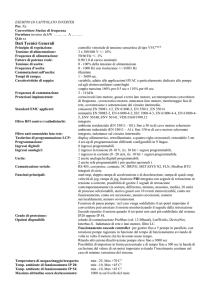
Figura 5.3: Ripple di corrente in funzione della frequenza di switching, per V = 50V , Ra = 0.5Ω, k = 0.3N m/A: a)
τe = 5ms b) τe = 10ms c) τe = 20ms
elettrico del circuito ci si deve rifare a queste due configurazioni considerando le condizioni iniziali, di corrente
per le induttanze e di tensione per eventuali condensatori, presenti al termine della fase precedente. Durante la
fase di on l’equazione del circuito è (considerando ideali transistor e diodo)
V = R a Ia + La
dIa
+ Vcem
dt
(5.1)
mentre nella fase di off
dIa
+ Vcem = 0
(5.2)
dt
Nelle condizioni di regime la corrente Ia non è costante, infatti durante la fase di on la corrente cresce secondo
la 5.1, mentre durante la fase di off decresce secondo la 5.2. Risolvendo la relazioni precedenti considerando le
condizioni iniziali citate, calcolando il valore massimo della corrente Imax che si verifica al termine della fase di
on dopo un tempo t = kT , il valore minimo della corrente Imin che si verifica al termine della fase di off dopo
un tempo t = (1 − k)T , il ripple di coppia risulta
R a Ia + La
∆I = Imax − Imin =
V
1 + eT /τe − ekT /τe − e(1−k)T /τe
2Ra
eT /τe − 1
(5.3)
Questa relazione è stata ottenuta supponendo che l’energia immagazzinata nell’induttanza sia tale da non fare
annullare la corrente durante la fase di off. Il ripple di corrente genera nel motore un ripple di coppia, infatti
C = KIa . L’ampiezza del ripple di corrente dipende dalle caratteristiche del circuito, in particolare da La e
della frequenza F = 1/T di funzionamento del convertitore, quindi a parità di motore il ripple di coppia può
essere ridotto aumentando la frequenza di funzionamento del convertitore.
In figura 5.3 è riportato il ripple di corrente in funzione della frequenza di switching. In generale aumentando
la frequenza di lavoro del convertitore il ripple diminuisce. Il diagramma è riportato per tre motori nelle
medesime condizioni di funzionamento ma con τe diverse. Al diminuire della τe aumenta il ripple, quindi motori
con elevate caratteristiche dinamiche (bassa τe e τm ) richiedono convertitori che funzionano ad elevata frequenza.
Esistono alcune configurazioni di chopper che sono in grado di erogare tensioni maggiori di quelle di alimentazione. Queste configurazioni possono essere utilizzate per realizzare convertitori per motori CC in grado di
fare una frenatura rigenerativa del motore. Con la frenatura rigenerativa l’energia prodotta dal motore viene
ceduta alla sorgente di alimentazione del convertitore, in modo che possa essere utilizzata nelle fasi in cui il
motore funziona come generatore di coppia (potenza meccanica). Lo schema base di questi convertitori (detti
chopper step-up) è riportato in figura 5.4.a. Nella 5.4.b è presentato il circuito equivalente quando il transistor
Q è chiuso, mentre nella 5.4.c il circuito equivalente quando il transistor è aperto.
Questi tipi di convertitore sono ad 1 quadrante e consentono una corrente negativa rispetto alla tensione
dell’alimentazione, perciò lavorano nel secondo quadrante nel piano corrente-tensione. La corrente generata
dal motore (a causa della forza contro elettromotrice) viene fatta ricircolare sul motore quando il transistor è
P. Righettini, R. Strada
c
Azionamenti dei sistemi mecccanici - Appunti delle Lezioni 52
CAPITOLO 5. AZIONAMENTI ELETTRONICI PWM
D
T
Q
a
b
c
Figura 5.4: Chopper step-up per la frenatura rigenerativa/reostatica
chiuso, mentre quando il transistor è aperto l’energia immagazzinata nell’induttanza del motore viene ceduta
all’alimentazione. In particolare può essere utilizzata per caricare un condensatore posto in parallelo all’alimentazione (si immagazzina energia nel condensatore come avviene per il volano di un meccanismo soggetto a
carichi variabili). Durante il funzionamento del convertitore l’energia non può fluire dall’alimentazione verso il
motore per la presenza del diodo D che impedisce la circolazione della corrente in questo verso. Durante la fase
di on vale le relazione
dIa
R a Ia + La
= Vcem
dt
mentre nella fase di off
dIa
V + R a Ia + La
= Vcem
dt
Da quest’ultima relazione, che descrive la carica del condensatore sull’alimentazione, si evince che la carica dello
stesso può avvenire anche quando Vcem < V . L’energia ceduta dal motore in un periodo (considerando valori
medi di tensione e corrente) è (Va I)T , mentre l’energia assorbita dal condensatore −(V Itof f /T )T , egugliandole
si ottiene
Va
V =
1−k
quindi per duty cycle k minori di 1 è possibile trasferire energia verso alimentazioni con tensioni più alte.
Chiaramente il condensatore non può essere caricato in modo indefinito (all’aumentare dell’energia immagazzinata nel condensatore aumenta la tensione ai sui capi), quindi raggiunta una tensione di soglia si deve
interrompere il flusso di corrente verso il condensatore. Una possibile soluzione prevede la frenatura reostatica, realizzabile collegando in parallelo al motore una resistenza in grado di dissipare l’energia proveniente dal
motore. La resistenza viene collegata per mezzo del tristore T , quando il condensatore raggiunge la massima
tensione ammissibile durante la fase di off del transistor (durante la frenatura reostatica il condensatore non si
scarica grazie alla presenza del diodo).
Per questo tipo di convertitore valgono le considerazioni fatte per gli step-down per quanto riguarda il ripple
di corrente (che in questo caso influenza la coppia frenante del motore) e per la frequenza di funzionamento.
L’energia immagazzinata nel condensatore può essere poi utilizzata da un convertitore step-down per alimentare il motore che deve fornire coppia motrice (l’energia fluisce dall’alimentazione verso il carico meccanico).
5.1.2
Chopper a più quadranti
È possibile realizzare chopper che funzionano in più quadranti, con i quali si ottengono i due tipi di funzionamento citato. Le descrizioni del funzionamento dei chopper a due e quattro quadranti che vengono riportate
rappresentano una delle possibili soluzioni. Qualsiasi sia la soluzione utilizzata è sufficiente cambiare la seguenza di commutazione dei dispositivi elettronici di potenza o il duty cycle per cambiare il comportamento del
convertitore. In particolare questi azionamenti sono bidirezionali senza discontinuità di funzionamento, non si
deve attendere l’intervento di relè meccanici che invertono la polarità del collegamento del motore al driver.
P. Righettini, R. Strada
c
Azionamenti dei sistemi mecccanici - Appunti delle Lezioni 53
CAPITOLO 5. AZIONAMENTI ELETTRONICI PWM
Q1
D1
V
Q1
D1
D3
Q3
Q2
D2
D4
Q4
V
Q2
D2
a)
b)
Figura 5.5: Chopper a più quadranti
5.1.3
A due quadranti
In figura 5.5.a è riportato lo schema di un chopper a due quadranti in grado di far ruotare il motore in una
sola direzione (tensione monopolare) e di fare frenatura rigenerativa (corrente bipolare). I transistor che lo
costituiscono vengono attivati alternativamente nel periodo T di ciclo, Q1 è in conduzione per 0 ≤ t ≤ kT mentre
Q2 lo è per kT ≤ t ≤ T . Per evitare cortocircuiti i due transistor non possono essere attivi contemporaneamente
(viene previsto un piccolo ritardo fra l’istante di commutazione dei due dispositivi). Durante la fase on di Q1
la corrente Ia soddisfa la relazione
dIa
V = R a Ia + La
+ Vcem
dt
per cui in condizioni iniziali nulle (Ia = 0) fluisce nel transistor Q1 verso il motore (corrente positiva) che genera
coppia. Nella fase successiva, in cui Q2 è in conduzione, la corrente ricircola sul motore attraversando il diodo
D2 , per cui si attenua secondo la
dIa
R a Ia + La
+ Vcem = 0
dt
Se prima del termine di questa fase la corrente si annulla e cambia segno, a causa della Vcem , essa ricircola sul
motore in verso opposto attraverso il transistor Q2 caricando l’induttanza La del motore. Nella fase successiva,
in cui Q1 è in conduzione, inizialmente la corrente ha verso opposto rispetto al caso precedente (nella stessa
configurazione), per cui fluisce attraverso il motore verso la sorgente di alimentazione per mezzo del diodo D1 ,
in modo da trasferire l’energia immagazzinata nell’induttanza. Finché la corrente ha verso negativo, il sistema
funziona nella configurazione rigenerativa, quando la corrente assume nuovamente il verso positivo il motore
genera coppia motrice.
Le due possibilità di funzionamento possono essere attivate semplicemente cambiando il duty cycle k del
convertitore, infatti la tensione media applicata al motore è Va = kV , pertanto la corrente media che attraversa
il convertitore è
kV − Vcem
Ia =
Ra
Risulta positiva se kV > Vcem , quindi quando il motore ruota ad una velocità inferiore a quella a vuoto impostata
(l’energia viene trasferita dal carico all’alimentazione), risulta negativa nel caso opposto, quindi quando il motore
ruota ad una velocità maggiore di quella a vuoto (l’energia viene trasferita dal carico all’alimentazione). La
massima coppia frenante dipende dalla velocità di rotazione del motore ottenibile imponendo k = 0.
Esistono condizioni di funzionamento in cui la corrente erogata dal convertitore mantiene sempre lo stesso
verso, positivo per la fase generativa, negativo per la fase rigenerativa. Per particolari valori di corrente all’inizio della fase di conduzione di uno dei due transistor (condizioni iniziali) la corrente può invertirsi in modo
da trasferire l’energia nella direzione opposta. Il comportamento della corrente dipende dalle caratteristiche
elettriche del motore (τe ), dalla frequenza 1/T di funzionamento del convertitore e dal duty cycle impostato.
P. Righettini, R. Strada
c
Azionamenti dei sistemi mecccanici - Appunti delle Lezioni 54
CAPITOLO 5. AZIONAMENTI ELETTRONICI PWM
5.1.4
A quattro quadranti
In figura 5.5.b è riportato lo schema di un chopper a quattro quadranti in grado di imporre al motore tensioni
di alimentazioni bipolari e di fare frenatura rigenerativa per entrambe le polarità di alimentazione del motore.
Nella configurazione che viene descritta nessun transistor rimane continuamente aperto o chiuso.
La seguenza di comando prevede di attivare Q4 dopo un periodo T dall’attivazione di Q1 , in modo analogo
Q2 viene attivato dopo un periodo T dall’attivazione di Q3 . Per quanto riguarda lo sfasamento di attivazione
fra la coppia di transistor Q1 − Q4 e Q2 − Q3 il transistor Q3 viene attivato quando il transistor Q4 viene aperto.
Considerando gli intervalli di tempo, in riferimento alla figura 5.6 risulta che Q1 è in conduzione per 0 ≤
t ≤ kT , mentre Q4 per T ≤ t ≤ T + kT . Q3 è in conduzione per T + kT ≤ t ≤ 3T , ovvero per kT − T ≤ t ≤ T ,
mentre Q2 per kT ≤ t ≤ 2T .
Q1
Q1
T
Q2
kT
2T
3T
Q3
Q3
Q4
Q4
1
Figura 5.6:
1≤k≤2
2
1
a)
3
kT
Q2
2
T
4
2T
3
4
3T
b)
Segnali di comando delle valvole elettroniche del chopper a quattro quadranti: a) per 0 ≤ k ≤ 1, b) per
Con questo tipo di comando risulta che per 1 ≤ k ≤ 2 al motore viene applicata una tensione media positiva,
mentre per 0 ≤ k ≤ 1 una tensione media negativa, quindi l’inversione di polarità della tensione applicata al
motore avviene in prossimità di k = 1.
1) Va = V
3) Va = 0
2) Va = 0
4) Va = −V
Figura 5.7: Fasi di funzionamento chopper a 4 quadranti
Nell’intervallo di tempo 2T si possono verificare 4 diverse configurazioni rappresentate in figura 5.6 e 5.7:
1.Q1 e Q4 contemporaneamente chiusi. In questo caso al motore viene applicata una tensione V , quindi Va = V .
Questa configurazione può verificarsi solo per 1 ≤ k ≤ 2. Se la corrente è concorde con la tensione applicata si
è nella configurazione generativa (flusso di energia verso il motore), in caso contrario la corrente fluisce verso
l’alimentazione tramite i diodi D1 e D4 (flusso di energia dal motore verso l’alimentazione).
P. Righettini, R. Strada
c
Azionamenti dei sistemi mecccanici - Appunti delle Lezioni 55
CAPITOLO 5. AZIONAMENTI ELETTRONICI PWM
2.Q1 e Q3 contemporaneamente chiusi. In questo caso la corrente ricircola sul motore al quale viene applicata
una tensione nulla, quindi Va = 0. Questa configurazione può essere raggiunta per qualsiasi valore di k. La
corrente che percorre il motore in questa fase può decrescere o aumentare a seconda che questa configurazione
si alterni ad una fase generativa od ad una rigenerativa.
3.Q2 e Q4 contemporaneamente chiusi. In questo caso la corrente ricircola sul motore al quale viene applicata
una tensione nulla, quindi Va = 0. Questa configurazione può essere raggiunta per qualsiasi valore di k. La
corrente che percorre il motore in questa fase può decrescere o aumentare a seconda che questa configurazione
si alterni ad una fase generativa od ad una rigenerativa.
4.Q2 e Q3 contemporaneamente chiusi. In questo caso al motore viene applicata una tensione negativa −V , quindi
Va = −V . Questa configurazione può verificarsi solo per 0 ≤ k ≤ 1. Se la corrente è concorde con la tensione
applicata si è nella configurazione generativa (flusso di energia verso il motore), in caso contrario la corrente
fluisce verso l’alimentazione tramite i diodi D2 e D3 (flusso di energia dal motore verso l’alimentazione).
Per 0 ≤ k ≤ 1 (tensione applicata al motore negativa) la fasi sopraccitate si alternano nel periodo 2T con la
seguenza 2 − 4 − 3 − 4, mentre per 1 ≤ k ≤ 2 (tensione applicata al motore positiva) con la seguenza 1 − 2 − 1 − 3.
Per un qualsiasi valore di k la tensione viene applicata al motore con una forma d’onda rettangolare di
periodo T , all’interno del quale per il tempo δT = k2 T viene imposta una tensione V (o −V ), mentre per il
tempo (1 − δ)T una tensione nulla. La tensione e la corrente media imposta al motore risultano pertanto
Va
=
Ia
=
2V (0.5 − δ) = V (1 − k)
Va − Vcem
Ra
Durante la frenatura rigenerativa la coppia frenante dipende dalla differenza Va − Vcem , per cui il valore
massimo lo si ottiene in corrispondenza di Va = 0. Se si inverte la polarità della Va per aumentare la coppia
frenante si abbandona la fase di frenatura rigenerativa e l’energia proveniente dalla rete e dal carico viene
dissipata sul motore (il motore funziona nel secondo quadrante). La frenatura rigenerativa è tanto più efficace
quanto più è elevata la velocità di funzionamento del carico e quanto più è elevata la pendenza della curva
caratteristica (K 2 /Ra ) del motore.
5.1.5
Considerazioni
1.Per particolari situazioni di funzionamento, la corrente erogata dal chopper può assumere valori eccessivi per
i componenti elettronici di potenza, per evitare che in tali condizioni si deteriorino la corrente erogata viene
tenuta istante per istante sotto controllo da appositi circuiti. Se la corrente supera il massimo valore istantaneo
ammesso viene cambiato il duty cycle in modo ridurre l’intensità. Questo permette di imporre la massima
corrente ammissibile dal convertitore e dal motore durante le fasi di accelerazione.
2.Il ripple di corrente (vedi la relazione) non dipende dall velocità di rotazione (Vcem ), da essa dipende solo il
valore medio della corrente.
3.Accoppiamenti convertitore-motore.
I chopper sono in grado di imporre una tensione media e di erogare una corrente il cui ripple dipende dalle
caratteristiche del motore. Il ripple di corrente genera un’oscillazione della velocità del motore, infatti risulta
K
∆ω
K
=
=
∆Ia
Jm s
Jm 2π1/T
in cui 1/T è la frequenza di funzionamento del convertitore, K costante del motore. Per mezzo della 5.3 e
ricordando la definizione di τm risulta
1
V
1 + eT /τe − ekT /τe − e(1−k)T /τe
∆ω =
2τm K 2π1/T
eT /τe − 1
per cui le variazioni di velocità sono tanto più basse quanto è più bassa la τe del motore, quanto più alta
la τm e quanto più è elevata la frequenza di funzionamento del convertitore. Per ottenere elevate velocità
P. Righettini, R. Strada
c
Azionamenti dei sistemi mecccanici - Appunti delle Lezioni 56
CAPITOLO 5. AZIONAMENTI ELETTRONICI PWM
di funzionamento senza ripple accettando transitori lunghi, si possono pertanto utilizzare motori con elevata
inerzia. La scelta di un convertitore che funziona ad elevata frequenza più ridurre ulteriormente il ripple
di velocità. Se l’inerzia del motore è molto elevata si possono utilizzare convertitori che funzionano a basse
frequenze realizzati con dispositivi elettroni di potenza economici (tristori). L’effetto di una elevata τm risulta
tanto puù sensibile quanto più bassa è la frequenza di funzionamento del convertitore.
P. Righettini, R. Strada
c
Azionamenti dei sistemi mecccanici - Appunti delle Lezioni