Chimica Fisica dei Materiali Molecolari
Alberto Girlando
November 2, 2006
2
Sono presenti alcuni argomenti svolti nella prima parte del corso, e che sono o di difficile reperibilità o comuni
ad altri corsi (seppure con linguaggio un po’ diverso). In quest’ultimo caso gli argomenti saranno trattati in
maniera poco approfondita durante le lezioni.
Chapter 1
Sintesi e preparazione di materiali
In questo corso ci occupiamo di chimica fisica dei materiali molecolari. E’ allora il caso di chiedersi prima di
tutto che cosa si intenda per materiali. Per materiale si intende una sostanza in un certo stato fisico, per lo
più solido, che in quanto tale si adatta ad un certo uso di tipo pratico o applicato. Quindi non si deve soltanto
disporre di una certa sostanza o prodotto chimico, ma questa sostanza deve anche avere delle caratteristiche
proprie del particolare stato fisico tali da poter essere utilizzata per un certo scopo. I materiali molecolari
sono abbastanza ovviamente una particolare classe di materiali, cioè materiali costituiti da molecole, ed in
cui le unità molecolari mantengono la propria identità. Visto che un materiale deve poter svolgere una qualche
funzione, acquista grande importanza non solo la sintesi del particolare prodotto chimico (la molecola) ma anche
la preparazione del materiale stesso. La sintesi e la preparazione significano due cose abbastanza diverse: per
sintesi del materiale si intende la formazione di un nuovo prodotto chimico a partire da materiali diversi in fase
gassosa, in fase liquida o in fase solida; la preparazione del materiale d’altra parte si riferisce alla produzione
di materiale in uno stato fisico come detto prima adatto ad uno scopo, a partire dallo stesso tipo di materiale.
Facciamo allora un breve riassunto dei metodi di preparazione dei materiali a partire dai metodi comuni a
diverse classi di materiali, per finire a quelli specifici dei materiali molecolari. Ci sono di verse maniere di
preparare i materiali, e possiamo distinguere la preparazione a partire da gas, a partire da soluzioni o a partire
dal solido. Di quest’ultima maniera non parleremo, perché la sintesi o la preparazione a partire da solido non
sono molto usate, e riguardano casi molto specifici. Le reazioni in stato solido sono difatti piuttosto infrequenti,
e per ciò che riguarda la preparazione si tratta per lo piú di fare avvenire delle transizioni di fase nel solido,
come nel caso della sintesi ad alta pressione del diamante.
1.1
Sintesi da gas a solido
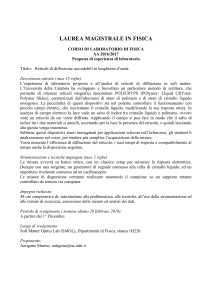
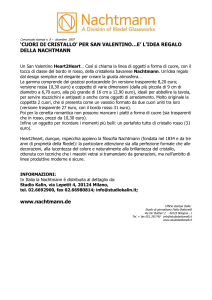
E’ forse la tecnica di produzione più diretta: implica la condensazione di un vapore su un substrato relativamente
freddo, la fase vapore essendo ottenuta riscaldando un solido per sublimazione o un liquido per evaporazione.
Lo schema del è mostrato in fig. 1.1.
Abbiamo una camera cui viene fatto il vuoto con una pressione dell’ordine di 10−4 Pa. Il materiale di solito
sotto forma di polvere solida viene messo in una navicella fatta di materiale refrattario. Per sostanze che hanno
punto di fusione dell’ordine di 1000 C o meno la navicella viene riscaldata mediante una resistenza. Il vapore
che risulta per lo più dal solido fuso colpisce il substrato posto sopra la navicella, e condensa in un film sottile
o in un cristallino. Per sostanze organiche ovviamente le temperature necessarie sono basse,ed il più delle volte
3
4
CHAPTER 1. SINTESI E PREPARAZIONE DI MATERIALI
Figure 1.1: Schema di una camera per la deposizione da vapore
non si passa attraverso il fuso, ma si ha la diretta sublimazione del solido. Questa tecnica, cosı́ come descritta, è
una preparazione del tipo fisico. In questa maniera possono essere preparate anche delle fasi solide metastabili
specialmente se il substrato è molto freddo rispetto alla temperatura di evaporazione. Il riscaldamento del
materiale di partenza può avvenire anche per via diversa dalla resistenza riscaldante. Per esempio possono
essere usati elettroni, focalizzando un fascio di elettroni sul materiale da vaporizzare. Questo metodo può essere
usato per produrre film sottili di Si o Ge amorfi. Un’altra possibilità è di usare un laser ad alta potenza, a
patto che la luce laser sia assorbita in maniera efficiente dal materiale da vaporizzare. Questa tecnica è nota
come “laser ablation”. La laser ablation per esempio viene usata per preparare films sottili di superconduttori
ad alta temperatura oppure per produrre i cosiddetti nanotubi di carbonio.
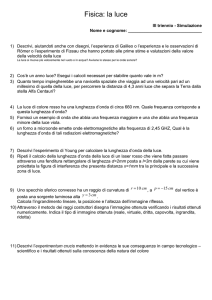
Abbiamo poi il processo di sputtering. In tale processo il materiale sotto forma di solido (target) viene
bombardato da ioni fortemente energetici creati da una corrente elettrica in gas, con la formazione di un
plasma. Il materiale estratto dal solido sotto forma di ioni o raggruppamenti di atomi passa sul substrato dove
si deposita un film. Questa è una tecnica preparativa cui il materiale di partenza è semplicemente trasportato
sul substrato, e il film risultante ha la stessa composizione chimica del materiale di partenza. Uno schema della
camera di sputtering è mostrato in fig. 1.2.
Si mantiene in una pressione di base minore di 10−4 Pa mediante una pompa diffusiva e il gas di sputtering
è introdotto nella camera a una pressione tipicamente di 0.1–1 Pa. Il gas è di solito argon. La maniera più
semplice per indurre lo sputtering è di applicare una alto voltaggio tra il target ed il substrato cosı́ da attrarre
gli ioni dal plasma. Questo metodo è ovviamente applicabile solo a materiali che siano metallici. Per potere
usare la tecnica con materiali scarsamente conduttori si genera un campo a corrente alternata a radiofrequenza
(RF sputtering). Le velocità di deposizione per la tecnica di sputtering RF sono tipicamente basse (1-10 A/s),
1.1. SINTESI DA GAS A SOLIDO
5
Figure 1.2: Schema di una camera di sputtering
e leggermente maggore per lo sputtering in DC. La velocità di deposizione può essere aumentata in maniera
significativa usando un campo magnetico costante attorno al materiale da evaporare cosı̀ da concentrare le
densità del plasma in vicinanza della materiale stesso.
Un problema che si presenta con la semplice tecnica di deposizione da fase vapore è il controllo della composizione quando il materiale di partenza ha una complessa composizione chimica. Si può avere una distillazione
frazionata del vapore cosicché la composizione del vapore e del solido iniziale non sono la stessa. L’altro caso di
variazione composizionale avviene quando il vapore consiste di specie molecolari che non presentano la stessa
composizione del fuso. Come esempio possiamo citare il caso di As2 S3 , per il quale il vapore in equilibrio termico
con il fuso consiste delle specie molecolari As4 S4 e S2 .
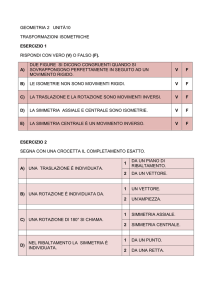
Una tecnica di sintesi che permette un preciso controllo composizionale a partire dal vapore è la cosiddetta
“molecolar beam epitaxy” (MBE) schematizzata in fig. 1.3 In questa tecnica raggi molecolari di ciascuno dei
costituenti richiesti sono diretti sul substrato. Il raggio molecolare è ottenuto da una cella di Knudsen o cella di
diffusione, riscaldata elettricamente e contenente il componente. La cella di Knudsen è aperta e chiusa mediante
diaframmi a scatto (shutters). Il processo di evaporazione avviene in una camera ad ultra alto vuoto (UHV) con
una pressione di meno di 10−9 Pa. Queste condizioni di ultra alto vuoto assicurano una minima contaminazione
e permettono il trasporto balistico del raggio molecolare sul substrato. Le velocità di crescita del film sottile
sono dell’ordine di 0.3 nm/s, cioè circa un monostrato per secondo. Se le sorgenti vengono aperte e chiuse a
velocità apprezzabilmente minori di un secondo, allora il profilo composizionale del film può essere controllato
in maniera precisa. La composizione di un particolare strato è determinata dal flusso di atomi in ciascun raggio
molecolare, a sua volta controllato dalla temperatura delle celle di Knudsen. In questa maniera possono essere
realizzate delle strutture artificiali consistenti da multistrati di materiali diversi. Sebbene la tecnica MBE offra
un preciso controllo composizionale nella crescita del film, la sua lenta velocità di crescita e lenta produzione di
campione, accoppiata all’alto costo della camera ad ultra alto vuoto ne impedisce l’uso uso di tipo industriale.
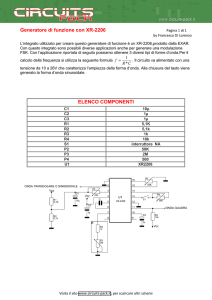
La tecnica di deposizione chimica del vapore (Chemical Vapor Deposition, CVD) è il processo in cui le specie
molecolari precursori reagiscono in maniera omogenea in fase gas o in maniera eterogenea alla interfaccia solido
gas, con la produzione di un film di composizione diversa da quella dei materiali di partenza. Le molecole
precursori possono essere fatte decomporre per mezzo di calore, di assorbimento di radiazione ultravioletta o
6
CHAPTER 1. SINTESI E PREPARAZIONE DI MATERIALI
Figure 1.3: Schema di una camera MBE
in un plasma elettrico. La tecnica termica è quella più comunemente usata. Semiconduttori compositi che
sono tecnologicamente importanti, come i materiali -V (GaAs, InP, GaP) possono essere cresciuti come film
epitassiali usando la CVD termica, ma partendo da precursori che sono molecole organiche in fase gas. Questa
variante viene chiamata “metal organic chemical vapor deposition” (MOCVD). Una illustrazione schematica di
un apparato per la crescita MOCVD è mostrato in fig. 1.4.
La tecnica, se confrontata con la MBE, ha il vantaggio di non richiedere un apparato ad ultra altro vuoto,
ed inoltre le varie sorgenti di diversi atomi o molecole possono essere controllati da valvole di flusso di gas. Ha
lo svantaggio però che l’intero volume di gas del reattore deve essere cambiato quando si passa da una sorgente
di gas all’altra per crescere film di composizione diversa. Altre varianti di questa tecnica non vengono discusse
qui.
1.2
Sintesi da liquido a solido
Possiamo distinguere due casi: crescita del cristallo a partire dal fuso e crescita del cristallo a partire da
una soluzione. Ci sono tre metodi generali nella produzione di materiali cristallini dal fuso. Il cristallo può
essere estratto dal fuso, oppure la cristallizzazione avviene all’interno di un apposito contenitore. Infine, la
cristallizzazione può avvenire all’interno del materiale stesso che funge anche da contenitore. Queste tecniche
permettono in genere una elevata purezza del materiale e sono state sviluppate soprattutto per ottenere cristalli
di Si e di Ge estremamente puri, meglio di una parte su 1012 . Forse la tecnica più importante per crescere
1.2. SINTESI DA LIQUIDO A SOLIDO
7
Figure 1.4: Schema di una camera MOCVD
cristalli singoli perfetti dal fuso è il metodo di Czochralski, mostrato in fig. 1.5.
In questo metodo del materiale fuso è contenuto in un recipiente refrattario e mantenuto a una temperatura
appena superiore al punto di fusione. Un seme (seed) di cristallo singolo attaccato a una bacchetta è posto sulla
superficie del fuso e tirato su lentamente, ad una velocità di pochi millimetri per minuto. Il fuso cristallizza in
maniera epitassiale sul cristallo seme, mantenendo la sua orientazione cristallografica nel cristallo tirato su. La
bacchetta con il cristallo, e il recipiente sono generalmente ruotati in senso opposto a una frequenza di poche
decine di giri al minuto per mantenere l’omogeneità del fuso e una temperatura costante nella regione della
crescita del cristallo. Come risultato di questa rotazione attorno all’asse longitudinale il cristallo tirato su ha
una geometria cilindrica. Cristalli di Si cresciuti in questa maniera hanno un diametro anche più grande di 20
cm.
Una maniera leggermente diversa che produrre cristalli da fuso è la tecnica di Bridgman dove il recipiente
che contiene il fuso in contatto con il cristallo seme è sottoposta a un gradiente di temperatura. Due varianti
del metodo sono illustrate in fig. 1.6.
In un caso si mantiene un gradiente di temperatura lungo il recipiente, riducendo la temperatura complessiva della fornace lentamente con il tempo. In questa maniera la posizione in cui la temperatura è uguale
alla temperatura di fusione del materiale si muove progressivamente lungo la lunghezza delle recipiente e con
essa si muove il fronte di cristallizzazione. Nell’altra variante (metodo di Stockbarger) invece il recipiente è
mosso relativamente alla fornace in cui il gradiente di temperatura e la temperatura media sono mantenute
costanti. Infine nella tecnica fusione a zona il profilo di temperatura è piccato ad una temperatura superiore
alla temperatura di fusione del materiale in una regione molto piccola del recipiente contenente il materiale.
Questo viene trasportato relativamente al punto riscaldante e quindi la zona in cui il materiale fonde si muove
lungo il recipiente lasciando dietro un solido cristallizzato da un opportuno cristallo seme.
Nelle tecniche precedenti lo scopo era di ottenere una cristallo perfetto a partire dal fuso. Talvolta si desidera
preparare materiale sotto forma solida ma che non abbia nessuna traccia di cristallinità. Il liquido non ha alcun
ordine a lungo raggio e quindi c’è la possibilità che se si raffredda un liquido in maniera sufficientemente rapida
si evita la cristallizzazione e si congela la struttura caratteristica del liquido. In questo caso si parla di vetro.
8
CHAPTER 1. SINTESI E PREPARAZIONE DI MATERIALI
Figure 1.5: Metodo Czochralski per la crescita da fuso
Questo processo di vetrificazione o formazione del vetro è appunto ottenuto sottoraffreddando un liquido al
di sotto di il suo normale punto di congelamento. Il processo avviene fuori dell’equilibrio termodinamico ed è
controllato dalla cinetica.
La crescita del cristallo a partire dalla soluzione è naturalmente il normale processo di ricristallizzazione. La
preparazione di cristalli da soluzione implica lo sciogliere il materiale da cristallizzare in un solvente adatto, cioè
che non reagisca, e poi causando la cristallizzazione, o riducendo la solubilità del soluto, per esempio abbassando
la temperatura, o aumentando la concentrazione del soluto nella soluzione togliendo un po’ del solvente, per
esempio per evaporazione. Il problema con questa tecnica è naturalmente la possibilità di includere il solvente
nel cristallo. Solventi usati per la crescita di cristalli da soluzione a bassa temperatura, ad esempio sotto i 100
C, sono l’acqua, per la cristallizzazione di molti composti inorganici, e vari solventi organici come ad esempio
acetone, etanolo, tetracloruro di carbonio ecc. per cristalli di molecole organiche. La crescita da soluzione ad
alta temperatura implica temperature molto piú alte del punto di ebollizione dell’acqua, tipicamente dell’ordine
di 1000 C. Il solvente in questo caso può essere un metallo liquido, oppure un composto inorganico tipo un
ossido o un fluoruro. Questi solventi inorganici sono chiamati flussi poiché essi riducono il punto di fusione del
soluto puro formando una soluzione di punto di fusione più basso. Questa forma della crescita da soluzione ad
alta temperatura è pertanto anche nota come crescita da flusso.
Un altro metodo di crescita da soluzione è quello che usa come solvente l’acqua supercritica, cioè a temperature e pressioni al di là del punto critico (647.3 K e 22.12 MPa). Questo metodo per esempio è usato per
crescere la modificazione cristallina dell’ α-quarzo, ovvero per la crescita delle zeoliti.
1.3. METODO SOL-GEL
9
Figure 1.6: Tecniche di crescita di cristalli con gradienti di temperatura. a) Metodo di Bridgman; b) Metodo
di Stockbarger; c) e d) Tecniche zone-refining
1.3
Metodo sol-gel
Questo metodo parte ancora da una soluzione, ma il materiale è decisamente diverso, per cui lo trattiamo a
parte. Il metodo sol-gel è particolarmente adatto per la sintesi di materiale refrattario costituito da ossidi a
temperature relativamente bassa, per esempio il vetro denso SiO2 può essere fatto in questa maniera, con una
temperatura di 1200 C, invece della temperatura di fusione di 2000 C. Il punto di partenza in questo metodo è un
sol cioè una dispersione colloidale di piccole particelle sospese nel liquido. Un sol può essere stabilizzato tramite
peptizzazione, cioè l’aggiunta di un agente che formi un monostrato elettricamente carico attorno ciascuna
particella. La repulsione elettrostatica impedisce quindi l’aggregazione delle particelle. Sotto adatte condizioni
chimiche e termiche, le particelle possono essere fatte reagire o interagire elettrostaticamente, cosicchè esse
formano una struttura tridimensionale di particelle connesse, nota come un gel, invece di aggregarsi per formare
delle particelle più grandi ma discrete, come succede nella precipitazione (vedi fig. 1.7).
Il gel leggermente umido o bagnato formato durante il processo sol-gel è costituito allora da una struttura
di particelle connesse e contenente il sol liquido nei suoi interstizi. Un gel si comporta come un materiale
facilmente deformabile oppure duro ma estremamente fragile. Via via che un gel invecchia, più particelle del
sol condensano, pertanto indurendo il gel. La rimozione del liquido interstiziale da un gel bagnato produce un
10
CHAPTER 1. SINTESI E PREPARAZIONE DI MATERIALI
Figure 1.7: Illustrazione della formazione del gel e della precipitazione (“flocculazione”) da un sol
gel secco noto come xerogel. Però il processo di essiccamento non è un processo banale se si vuole mantenere
la integrità strutturale della struttura del gel. Questo metodo può essere anche usato per ottenere materiale
funzionalizzato, introducendo delle molecole apposite all’interno della struttura dello xerogel. Il materiale
risultante non ha ovviamente struttura cristallina, ma nemmeno vetrosa ed è piuttosto classificabile come un
frattale.
1.4
1.4.1
Metodi specifici per i materiali molecolari
Spin-coating
I materiali molecolari sono molto adatti alla preparazione con questa tecnica, che è allo stesso tempo semplice
ed economica. Lo spin coating è usato per molte applicazioni in cui un substrato relativamente piatto deve
essere ricoperto con uno strato sottile (dell’ordine dei micron) di materiale. Il materiale che deve costituire il
coating viene sciolto o disperso in un solvente adatto, e la soluzione viene depositata sul substrato che viene
fatto ruotare velocemente. La rotazione causa la formazione di un film uniforme di soluzione, allo stesso tempo
facilitando l’evaporazione del solvente e quindi la formazione di un film di spessore abbastanza uniforme. Tra
le tecnologie che adottano lo spin coating possiamo ricordare: i) le deposizione di “photoresist” per definire i
pattern di fabbricazione dei microcircuiti; ii) formazione di layers dielettrici o isolanti, sempre per i microcircuiti;
iii) ricopertura di un layer magnetico (sospensione i particelle magnetiche) in un hard disk, o ricopertura di
uno strato lubrificante per le testine di lettura; iv) layer attivo nei compact disks; v) flat display coatings; vi)
deposizione di polimeri con particolari proprietà elettriche, etc.
Il processo di spin-coating può essere suddiviso in quattro fasi (fig. 1.8).
1. Nel primo stadio il fluido con disciolto il materiale viene depositato sul substrato. Ciò può essere fatto
1.4. METODI SPECIFICI PER I MATERIALI MOLECOLARI
11
Figure 1.8: Deposizione di films con il metodo spin-coating
con una pipetta che versa la soluzione, o con una tecnica spray. Di solito la soluzione del materiale viene
versata in eccesso rispetto alla quantità richiesta per un dato spessore di film. Per molte soluzioni è spesso
conveniente effettuare la deposizione usando un filtro di pori sub-micrometrici, per eliminare le particelle
che potrebbero portare a dei difetti. Un’ altra questione importante è se la soluzione “bagna” la superficie
completamente. Se non lo fa, si può avere una non completa ricopertura.
2. Nel secondo stadio il substrato viene posto in rotazione accelerando la velocità di rotazione fino a raggiungere il valore finale desiderato. Questo stadio è di solito caratterizzato da una espulsione violenta
del fluido dal substrato, a causa della forza centrifuga. Data lo spessore iniziale del fluido depositato, si
possono avere dei vortici a spirale. Questi vortici si possono formare a causa della diversa velocità angolare
di rotazione tra il layer di fluido a contatto con il substrato rotante ed i layer superiori, che seguono l’
accelerazione con ritardo. Alla fine, il fluido è sufficientemente sottile da permettere una rotazione uniforme col substrato, e la forza centrifuga che tende a espellere il fluido è controbilanciata dalla viscosità
del fluido e dalla sua adesione al substrato.
3. Nel terzo stadio il substrato sta ruotando a velocità costante, e le forze di viscosità dominano il processo di
assottigliamento del film. Questo processo è la prosecuzione del secondo stadio, ma il fluido viene espulso
in maniera meno violenta, con un assottigliamento del film che di solito è piuttosto uniforme. Talvolta
si possono avere degli effetti di spigolo, perché il fluido fluisce uniformemente verso l’esterno, ma forma
12
CHAPTER 1. SINTESI E PREPARAZIONE DI MATERIALI
delle gocce al bordo del substrato prima che queste possano essere allontanate. Allora, a seconda della
tensione superficiale, la viscosità, la velocità di rotazione etc., ci possono essere delle piccole differenze
di spessore in corrispondenza dei bordi del substrato. Un trattamento matematico del comportamento
del fluido mostra che se il liquido ha una viscosità Newtoniana (cioè lineare) e se lo spessore del film è
inizialmente uniforme, allora lo spessore del film rimarrà uniforme.
4. Il quarto stadio si ha quando il substrato gira a velocità costante e l’ evaporazione del solvente domina l’
assottigliamento del film. Via via che il terzo stadio procede, lo spessore del fluido raggiunge un punto in
cui la viscosità impedisce ulteriori flussi del fluido. A questo punto, l’ evaporazione del solvente diviene l’
effetto dominante. In effetti, il coating a questo punto “gelifica”, perché con l’ evaporazione del solvente
la viscosità della soluzione aumenta, e fissa il coating al substrato.
1.4.2
Ink-jet printing
La tecnica dello spin-coating non può essere usata qualora il film debba avere un ben preciso pattern. Nel caso
dei photo-resits, per esempio, si fa una deposizione spin-coating, poi si crea il pattern sul photo-resists, e poi si
deposita il materiale attivo. Una strategia emergente per creare direttamente delle deposizioni di materiale in
strutture ben definite, è quello della stampa con tecnica ink-jet, già usata a livello industriale nella produzione
di displays basati su materiali organici, per es. polimeri. Il polimero viene disciolto in un solvente adatto, e
poi la soluzione viene “stampata” sul substrato mediante una testina con fori di scala micrometrica, del tipo di
quella usata nelle comuni stampanti a getto di inchiostro (ink-jet). Raffinando la tecnica, è possibile depositare
goccioline corrispondenti a diversi colori del display sullo stesso pixel. Il processo può essere molto veloce,
generando per es. lo schermo di un telefonino in pochi secondi.
La stampa ink-jet richiede un controllo preciso della chimica del materiale, per soddisfare non solo le proprietà
elettriche ed ottiche richieste per es. per un display, ma anche per ottimizzare le proprietà meccaniche (viscosità,
densità, etc.) del materiale e dell’inchiostro che deve essere ottenuto con una opportuna scelta del solvente.
1.4.3
Films ultrasottili o monomolecolari
Infine vediamo la preparazione di films ultrasottili di composti organici. Per films ultrasottili si intendono
dei films al limite monomolecolari o di spessore corrispondente a poche molecole. La preparazione di questi
films può essere fisica o chimica. La preparazione fisica è basata su quella che prende il nome di tecnica di
Langmuir-Blodgett (LB). In questa tecnica una soluzione di molecole cosiddette anfifiliche, e cioè con una una
testa idrofila e una coda idrofobica, viene sparsa sulla superficie dell’acqua (vedi fig. 1.9).
La testa idrofila penetra nell’acqua mentre quella idrofobica rimane fuori. Quindi le molecole si spargono
sulla superficie dell’acqua come un olio. Mediante una opportuna barriera le molecole possono essere compresse
cosı̀ da riempire in maniera uniforme tutta la superficie. Abbiamo allora un film monomolecolare sulla superficie
dell’acqua. Per una pressione superficiale sufficientemente elevata il film ha una struttura ordinata. Questo film
può allora essere trasferito a un adatto substrato, che viene tirato su dalla superficie dell’acqua mantenendo
costante la pressione superficiale. Si possono depositare anche più strati alzando ed abbassando il substrato
nella soluzione. Il caso ideale sarebbe quello di trasferire un film perfettamente ordinato, ma in realtà si hanno
dei domini ordinati in maniera diversa sul substrato. Le forze che tengono unite le molecole al substrato e tra
di loro sono quindi forze di tipo fisico: si parla ciodi adsorbimento. Da questo punto di vista il film preparato
con il metodo LB non è un film particolarmente stabile o resistente, e quindi questa tecnica è usata a livello di
laboratorio, e difficilmente potrà trovare impiego su larga scala.
1.4. METODI SPECIFICI PER I MATERIALI MOLECOLARI
13
Figure 1.9: Tecnica di Langmuir-Blodgett per l’ottenimento di films monomolecolari
Un metodo alternativo alla tecnica LB è quello di legare le molecole al substrato tramite un legame chimico.
In questo caso si parla di films autoassemblantisi (self-assembled), di cui riporto un esempio in fig. 1.10.
In un caso abbiamo un solo strato molecolare mentre nell’altro caso abbiamo la possibilità di costruire più
strati molecolari, che si autoorganizzano tramite la formazione di specifici legami chimici. Questa tecnica è
molto promettente, ma ovviamente non sempre applicabile.
14
CHAPTER 1. SINTESI E PREPARAZIONE DI MATERIALI
Figure 1.10: Esempi di films self-assembled
Chapter 2
Classificazione dei materiali
Il primo problema che ci dobbiamo porre è come classificare la grande varietà di materiali con cui abbiamo
a che fare. Infatti delle collezioni di particelle (dove con particelle s’ intende sia atomi che molecole) possono
aggregarsi in una varietà pressoché infinita strutture di equilibrio e di non equilibrio. Queste strutture possono
essere caratterizzate dalle posizioni medie delle particelle e dalle interazioni spaziali tra le particelle stesse. Per
esempio i cristalli, con la loro disposizione regolare di particelle, sono più ordinati ed hanno simmetria più bassa
dei fluidi. Nei fluidi si ha difatti una disposizione disordinata delle particelle, e queste sono anche in continuo
moto termico. Allora se consideriamo per esempio un gas di tipo ideale abbiamo una disposizione uniforme
delle particelle con interazioni nulle o per meglio dire trascurabili. Abbassando la temperatura o aumentando la
densità (cioé la pressione), si ha un aumento delle forze di interazione: si parla allora di liquido, dove c’è una forte
correlazione tra le posizioni delle particelle. Tuttavia un liquido ha la stessa simmetria del gas. Raffreddando
ulteriormente si possono formare varie fasi di simmetria ancora più bassa. Alle temperature più basse la fase di
equilibrio di gran parte dei materiali o dei sistemi di particelle è un cristallo altamente ordinato. Strutture di
non equilibrio come gli aggregati possono avere delle simmetria insolite non trovate nelle strutture di equilibrio.
Si pone dunque il problema di classificare questi tipi di materiali in una maniera un poco più razionale e
quantitativa. Possiamo a tale scopo definire le seguenti quantità. Definiamo anzitutto la funzione densità, che
specifica il numero di particelle per unità di volume in una certa posizione r [r = (x,y,z) in tre dimensioni, e la
sommatoria è estesa a tutte le particelle α]:
n(r) =
X
δ(r − rα )
(2.1)
α
Dove δ è il delta di Dirac, che mi dice se nel punto r = rα c’è o no una particella. Nei sistemi quanto
meccanici, r è l’operatore posizione per una particella, nei sistemi classici esso è la variabile dinamica che
specifica la posizione della particella. La media statistica dell’operatore densità è la densità media hn(r)i nel
punto r. In un fluido omogeneo e isotropo, la densità media è indipendente da r ed è semplicemente la densità
nel fluido.
Possiamo poi definire delle funzioni di correlazione, che sono medie statistiche di prodotti della funzione
densità in punti diversi dello spazio. La più importante di queste funzioni è la funzione di correlazione densità
tra una coppia di punti:
X
X
(2.2)
δ(r1 − rα )][
δ(r2 − rα0 )]i
Cnn (r1 , r2 ) = hn(r1 )n(r2 )i = h[
α
15
α0
16
CHAPTER 2. CLASSIFICAZIONE DEI MATERIALI
Abbiamo poi la funzione di distribuzione per una coppia, g(r1 , r2 ), definita nella maniera seguente:
hn(r1 )ig(r1 , r2 )hn(r2 )i = h
X
δ(r1 , rα )δ(r2 , rα0 )i
(2.3)
α6=α0
ovvero:
g(r1 , r2 ) =
P
h α6=α0 δ(r1 − rα )δ(r2 , rα0 )i
hn(r1 )ihn(r2 i
(2.4)
Sostanzialmente, data una particella α in un punto r1 , la funzione di distribuzione per la coppia è la
probabilità di trovare una particella diversa, α’ nel punto r2 . Una maniera diretta ed intuitiva di visualizzare
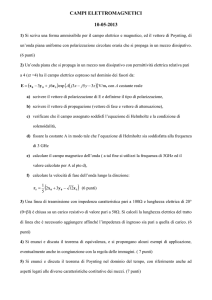
g(r1 = 0, r2 = r) ≡ g(r) è quella riportata in figura 2.1. Si scelga una configurazione di posizioni di particelle
nell’insieme delle configurazioni permesse, e si scelga unPsistema di coordinate cosı̀ che una particella che
etichettiamo con lo zero è all’origine. Allora g(r) = hni−1 h α6=0 δ(r−rα +r0 )i può essere determinata contando
il numero di particelle in un volume infinitesimo a distanza r dalla particella all’origine. In un gas ideale non si
sono correlazioni, e g(r) = 1 . Questo valore, o in ogni caso il valore costante raggiunto per r → ∞, viene preso
come valore di riferimento, g0 . Se il sistema è isotropico g(r) → g(r), con r = |r|. In questo caso g(r) è nota
come funzione di distribuzione radiale.
Date queste definizioni possiamo cercare di classificare i materiali in base alle loro proprietà di simmetria
nella distribuzione delle particelle. La simmetria è, come sappiamo e come vedremo anche meglio in questo corso,
un metodo potentissimo per classificare un certo sistema e per ottenere informazioni su di esso. Naturalmente
i sistemi reali saranno solo approssimazioni del modello ideale mediante il quale facciamola la classificazione.
2.1
Liquidi e gas
Sia i liquidi che i gas sono dei fluidi. I fluidi sono spazialmente omogenei e isotropici dal punto di vista
rotazionale. Questo significa che l’intorno medio di ogni punto nel fluido è identico a quello di ogni altro punto
ed è indipendente dalla direzione. Allora le proprietà medie del fluido sono invarianti rispetto alle traslazioni
lungo un vettore qualunque R, di lunghezza e direzione arbitraria, e rispetto a rotazioni arbitrarie attorno ad
un asse qualunque. Questo implica che le densità sono spazialmente uniformi e che la funzione di correlazione di
una coppia dipende solo dalla differenza tra le due coordinate spaziali. Difatti l’invarianza traslazionale implica
che hn(r)i = hn(r + R)i, dove appunto il vettore spostamento R è arbitrario. In particolare possiamo sceglierlo
uguale a −r, cosicché hn(r)i è uguale alla densità hn(0)i nell’origine prescelta. Allora la densità non dipende
da r. In maniera analoga l’invarianza delle rotazioni fa sı̀ che la funzione di correlazione dipenda soltanto dalla
distanza tra le due particelle.
Come sappiamo l’insieme delle operazioni che lasciano un sistema inalterato forma un gruppo chiamato il
gruppo di simmetria. Il gruppo delle traslazioni arbitrarie, anche infinitesime, e delle rotazioni arbitrarie, è
detto il gruppo Euclideo. Nello spazio tridimensionale avremo tre direzioni di traslazione indipendenti, e tre
assi di rotazione indipendenti, cosicché il gruppo Euclideo è caratterizzato dalle operazioni T 3 e R3. I fluidi
allora hanno la simmetria più alta possibile cioè hanno il più gran numero di operazioni di simmetria. Tutte le
altre fasi di equilibrio della materia sono invarianti solo sotto alcuni sottogruppi del gruppo Euclideo, ed hanno
una simmetria più bassa della fase fluida. Come vedete un gas e un liquido hanno la stessa simmetria. In effetti
il passaggio gas-liquido può anche avvenire in maniera continua, andando oltre il punto critico. Tranne che
2.1. LIQUIDI E GAS
17
Figure 2.1: Configurazione atomica tipica di un fluido a sfere rigide. In basso: la corrispondente distribuzione
radiale per tre diverse frazioni di volume (cioè il rapporto tra il volume occupato dalle sfere rigide e il volume
totale).
18
CHAPTER 2. CLASSIFICAZIONE DEI MATERIALI
per i gas ideali, ci sono sempre delle interazioni e delle correlazioni tra le particelle e quindi una funzione di
distribuzione per le coppie che differisce dall’unità, e che riflette queste correlazioni. La differenza tra un gas
ideale (nessuna correlazione) e un liquido, che ha appunto delle correlazioni abbastanza forti, è dunque riflessa
nella diversa funzione di correlazione. Se per esempio approssimiamo le particelle di un liquido a delle sfere
rigide, facendo ovviamente la grossa semplificazione di considerare solo le forze repulsive, abbiamo la situazione
raffigurata nella figura precedente. E’ chiaro da questa figura che ci sono delle forti interazioni a corto raggio
nella posizione delle particelle. C’è un guscio dei primi vicini che consiste di circa 6 particelle (in due dimensioni),
poi una caduta di densità causata dall’esclusione da questo guscio, poi un altro guscio e cosı̀ via. La correlazione
muore rapidamente nella scala alcuni diametri di particella. La funzione di distribuzione radiale ha allora la
forma mostrata in basso nella figura precedente (il guscio dei primi vicini è evidenziato in grigio). Abbiamo
quello che si chiama un ordine a corto raggio (SRO) che quindi può essere definito come quell’ordine in cui
la funzione di distribuzione radiale cade al valore di riferimento g0 , preso come zero, oltre una certa distanza
tipica, ξ, che viene detta lunghezza di correlazione. L’annullarsi della funzione di correlazione può in questo
caso essere schematizzato da un esponenziale:
[g(r) − g∞ (r)] ≡ g(r) = exp(−r/ξ)
SRO
(2.5)
Come abbiamo detto nella lezione precedenti, se raffreddiamo velocemente un liquido possiamo impedire
la cristallizzazione cioè l’abbassamento della simmetria, e ottenere un vetro. Il vetro è una struttura di non
equilibrio che ha le stesse proprietà di simmetria di un fluido, ma magari una diversa funzione di correlazione
radiale, che in ogni caso è statica cioè non cambia nel tempo (mentre nel caso di un liquido la funzione di
distribuzione radiale deve essere intesa come una media temporale o una media statistica).
2.2
Solidi cristallini
Penso sappiate benissimo cosa si intende per un cristallo perfetto. Questo consiste in un riempimento dello
spazio mediante copie identiche di unità strutturali singole. La struttura è allora una struttura periodica, che
si ripete a intervalli regolari e stabiliti. Un esempio è mostrato in fig. 2.2
Abbiamo ancora la simmetria traslazionale, ma né la direzione né il modulo del vettore sono arbitrari.
Abbiamo quindi perso tutte e tre le operazioni di traslazione Euclidee. La stessa cosa vale per le rotazioni.
Quindi il passaggio da fluido a cristallo significa passare da un gruppo continuo delle rotazioni e delle traslazioni
a un gruppo discreto, che come vedremo si chiama gruppo spaziale. In questo in questo corso ci occuperemo
soprattutto, per non dire quasi esclusivamente, dei solidi cristallini. Rimandiamo quindi alle lezioni successive
una descrizione più dettagliata della simmetria cristallina. Per adesso possiamo concludere questa sezione
dicendo che in un cristallo c’è un ordine a lungo raggio (LRO), dato che in questo caso l’ordine si ripete maniera
pressoché infinita, e la funzione di correlazione è diversa da zero anche per distanze infinite:
lim g(r) 6= 0
r→∞
LRO
(2.6)
C’è poi anche la situazione intermedia, cioè con ordine “quasi a lungo raggio” (QLRO). Menzioniamo infine
che anche che i film ultrasottili come i films LB, ovvero le superfici di un cristallo hanno una simmetria discreta,
seppure in due dimensioni, piuttosto che in tre dimensioni.
2.3. CRISTALLI LIQUIDI
19
Figure 2.2: Esempio di struttura cristallina bidimensionale.
2.3
Cristalli liquidi
Nelle sezioni precedenti abbiamo visto due forme estreme di materia condensata: liquidi omogenei e isotropici
con una struttura media invariante per traslazioni e rotazioni arbitrarie, e solidi cristallini con strutture medie
che sono invarianti soltanto rispetto a certe traslazioni e rotazioni discrete. Il liquido ha ordine a corto raggio,
e la simmetria più alta possibile. Il solido cristallino ha un ordine a lungo raggio e simmetria più bassa. Tra
questi due estremi ci sono dei sistemi che esibiscono delle correlazioni a corto raggio in alcune direzioni e delle
correlazioni a lungo raggio in altre: essi hanno dunque simmetria intermedia tra quella del liquido e quella del
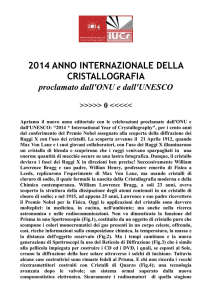
cristallo. Tra questi sistemi “intermedi” abbiamo i cosiddetti cristalli liquidi. Supponiamo di avere un sistema
costituito da molecole di forma allungata. Esse quindi perdono più facilmente la possibilità di riorientarsi
rispetto quella di traslare nella direzione dell’elongazione. Allora al diminuire della temperatura, a partire
dalla fase liquida si perde in primo luogo l’invarianza rotazionale (ricordiamo che parliamo sempre di rotazioni
infinitesime) lungo due assi di rotazione. Abbiamo allora il cristallo liquido nematico illustrato in fig. 2.3 alla
lettera (b).
Nella fase nematica le molecole si dispongono parallelamente ad n, vettore unitario che esprime la direzione
media dell’allineamento molecolare. E’ chiaro che le rotazioni infinitesime attorno ad un asse parallelo a n sono
operazioni di simmetria Euclidea, mentre non lo sono rotazioni perpendicolari a n, in quanto ci si ritrova nella
stessa situazione solo per rotazioni di 180 gradi.
Altri cristalli liquidi oltre perdere due gradi di invarianza rotazionale, possono anche perdere l’invarianza
rispetto a gradi di libertà traslazionali infinitesimi, dando luogo a un cristallo liquido di tipo smectico A, oppure
cristallo smectico di tipo C, sempre illustrati in fig 2.3. Se la forma delle molecole invece che essere allungata
come un sigaro, somiglia a quella di un disco, abbiamo i cristalli liquidi colonnari. In questo caso è mantenuta
l’invarianza traslazionale soltanto lungo la direzione delle colonne, e viene persa tutta l’invarianza rotazionale.
20
CHAPTER 2. CLASSIFICAZIONE DEI MATERIALI
Figure 2.3: Rappresentazione schematica della disposizione delle molecole in: (a)un liquido; (b) un cristallo
liquido nematico; (c) un cristallo liquido smectico A; (d) un cristallo liquido smectico C; (e) un cristallo liquido
colonnare.
2.4. CRISTALLI GLOBULARI
FASE
Liquido
Crist. liquido
nematico
Crist. liquido
smectico A
Crist. liquido
smectico C
Crist. liquido
colonnare
Crist. plastico
Cristallo
21
simm.trasl.
continua
T3
simm.rotaz.
continua
R3
ordine
traslazionale
SRO(3)
ordine
rotazionale
SRO(3)
T3
R1
SRO(3)
LRO(2),SRO(1)
T2
R1
SRO(2),LRO(1)
LRO(2),SRO(1)
T2
R0
SRO(2),LRO(1)
LRO(3)
T1
T0
T0
R1
R3
R0
SRO(1),LRO(2)
LRO(3)
LRO(3)
LRO(2),SRO(1)
SRO(3)
LRO(3)
Table 2.1: Classificazione delle fasi in base alla simmetria
2.4
Cristalli globulari
I cristalli globulari o cristalli plastici sono cristalli molecolari in cui le molecole hanno forma pressoché sferica.
L’esempio tipico di un cristallo glubulare è il fullerene o C60 . Prima della cristallizzazione completa, i cristalli
globulari formano una fase detta cristallo plastico, in cui è persa l’invarianza traslazionale, e quindi si è stabilito
un ordine a lungo raggio traslazionale, ma non quella rotazionale, per cui le molecole sono libere di orientarsi
reciprocamente all’interno del cristallo. Nella tabella 2.4 riassumiamo la simmetria dei vari sistemi considerati
finora e le loro funzioni di correlazione.
2.5
Strutture incommensurate
Ci sono in natura delle strutture che non sono né con ordine a corto raggio come il liquidi né periodiche
come i cristalli. Queste esibiscono delle modulazioni spaziali discrete, ma i rispettivi periodi stanno tra di loro
come numeri irrazionali. Si parla allora di strutture incommensurate, che di solito risultano dalla competizione
tra due diverse scale di lunghezza. Come primo semplice esempio di strutture incommensurate consideriamo
l’adsorbimento di gas nobili su un reticolo di grafite come illustrato in fig. 2.4
Le dimensioni del Kripton adsorbito su grafite (in alto) sono tali che esso può sovrapporsi a un esagono di
grafite ogni due. La struttura è allora una struttura ordinata e periodica. Lo Xenon è più grande del Kr e
allora la struttura commensurata descritta sopra non è più possibile. Le molecole di Xe prendono allora una
posizione incommensurata rispetto al reticolo sottostante: il periodo secondo cui si ripete la struttura dello Xe
è diverso da quello della grafite, ed i due periodi sono incommensurati, cosicchè la struttura complessiva della
superficie non è periodica.
Un altro caso interessante di reticolo incommensurate è quello dei cosiddetti quasi-cristalli. Questi materiali
esibiscono un ordine icosaedrico, come è evidente dalla morfologia dell’abito cristallino (vedi fig. 2.5). Nella figura
è evidente un dodecaedro di AlCuFe. Ora il fatto è che la simmetria icosaedrica, cioè contenente assi di ordine
5, non può riempire in maniera periodica tutto lo spazio. Questo era uno dei fondamenti della cristallografia
classica. Una razionalizzazione del fatto che ciononostante questi cristalli esistono, può essere fornita notando
22
CHAPTER 2. CLASSIFICAZIONE DEI MATERIALI
Figure 2.4: Kripton (in alto) e Xenon (in basso) adsorbiti su grafite.
Figure 2.5: Foto di un quasi-cristallo di AlCuFe, mostrante la caratteristica struttura dodecaedrica con facce
pentagonali.
2.6. FRATTALI
23
Figure 2.6: Porzione di un “pavimento” di Penrose, con illustrazione delle “mattonelle” (a destra).
che una struttura quasi cristallina aperiodica in tre dimensioni è la proiezione nello spazio tridimensionale di una
struttura periodica in uno spazio a sei dimensioni. Un punto di vista diverso può essere quello che fa riferimento
al cosiddetto pavimento di Penrose, fig.2.6, che fornisce una visualizzazione del riempimento dello spazio in
due dimensioni, cioè un pavimento, mediante l’uso di due diversi tipi di mattonelle di tipo forma rombica. La
struttura ha simmetria pentagonale, ma è aperiodica nel senso che la periodicità in direzioni diverse non è
commensurata. Da questo punto di vista i quasi-cristalli sono dunque delle strutture incommensurate.
2.6
Frattali
Un’altra classe strutturale distinta di materiali comprende i frattali. Queste strutture sono caratterizzate
dall’essere auto-simili, ovvero la struttura appare identica in tutte le scale di lunghezza. Un esempio matematico
in due dimensioni di una struttura frattale è riportata in fig. 2.7
Materiali reali che esibiscono strutture frattali sono gli aerogel di silicio, oppure delle strutture aggregate di
particelle quali quelle che si hanno nei sol: si veda nella fig. 2.8 un aggregato frattale di particelle d’oro.
24
CHAPTER 2. CLASSIFICAZIONE DEI MATERIALI
Figure 2.7: Un esempio di struttura frattale, il gasket di Sierpinski, mostrando anche la costruzione del frattale
a partire dal triangolo iniziale.
Figure 2.8: Un aggregato frattale di particelle d’oro.
2.6. FRATTALI
25
Nonostante il fascino che possono esibire strutture come i frattali o i quasi-cristalli, nel nostro corso ci
dedicheremo soprattutto alle strutture critalline, o comunque ordinate, perchè come vedremo la simmetria è in
questo caso di grande aiuto per ottenere una descrizione in certi casi molto accurata della chimica e della fisica
di questi sistemi. E’ pertanto logico partire da qui.
26
CHAPTER 2. CLASSIFICAZIONE DEI MATERIALI
Chapter 3
I cristalli e la loro simmetria
Quando gli atomi sono legati uno all’altro, si trova che essi stanno ad una ben definita distanza di equilibrio,
che è determinata dalla condizione che l’energia totale sia ad un minimo. Pertanto, in un solido composto da un
gran numero di atomi uguali, l’energia minima può essere ottenuta solo se ogni atomo ha un intorno identico.
Ciò dà luogo ad una disposizione periodica tridimensionale che ha il nome di “stato cristallino”. La stessa cosa
è vera per i solidi che siano composti da più di un elemento: in questo caso, certi gruppi di atomi possono essere
considerati come le unità ripetitive della struttura cristallina.
L’esistenza della periodicità dà luogo ad un numero di proprietà tipiche dei cristalli, e lo sfruttamento della
simmetria risultante consente di semplificare il trattamento in maniera considerevole. Anche se un cristallo
reale non possiede mai una periodicità tridimensionale esatta, si assume una perfetta periodicità nel modello e
si trattano le deviazioni (difetti, dislocazioni, ecc.) come una perturbazione.
3.1
Reticolo, simmetria traslazionale e gruppi spaziali
La disposizione periodica tridimensionale degli atomi (o dei gruppi di atomi) può essere ottenuta in vari modi;
il numero di tali modi è però finito. Il concetto che ci permette di definire questi modi è quello di reticolo,
definito come una struttura infinita di punti in cui ogni punto ha un intorno identico a quello di tutti gli altri
punti. Un reticolo è una costruzione geometrica, ed è generato da un vettore di traslazione primitivo:
tn = n1 a1 + n2 a2 + n3 a3
(3.1)
dove n1 , n2 , n3 sono numeri interi e a1 , a2 , a3 sono tre vettori arbitrari indipendenti. Il numero infinito di
punti generati da questo vettore sono i punti reticolari. La figura 3.1 mostra un reticolo in due dimensioni e un
insieme di punti che non costituiscono un reticolo perché l’intorno angolare di ogni punto non è lo stesso. Da
notare anche che la simmetria di un punto reticolare è comunque Ci , cioè il centro di inversione.
Completando il parallelepipedo formato da a1 , a2 , a3 viene racchiuso un volume V = a1 · (a2 × a3 ) che,
traslato parallelamente a se stesso da tn , riempie tutto lo spazio. Questo volume viene chiamato cella unitaria
primitiva qualora contenga solo un punto reticolare. Notare che per esempio nel reticolo bidimensionale della
fig. 3.1, ogni punto reticolare è condiviso tra quattro celle, e quindi conta per 1/4, cosicché la cella contiene
in totale un punto reticolare. Una cella si dice non primitiva o semplicemente cella unitaria, se contiene più di
un punto reticolare. Ogni reticolo descritto da una cella non primitiva può essere descritto anche da una cella
primitiva. In questo caso però si perde qualche vantaggio, come per esempio vettori reticolari non ortogonali.
27
28
CHAPTER 3. I CRISTALLI E LA LORO SIMMETRIA
Figure 3.1: a) Un esempio di reticolo bidimensionale; b) Un esempio di una disposizone periodica di punti che
non formano un reticolo.
Questo è esemplificato nella fig.3.2 a sinistra, dove una cella unitaria primitiva, P, detta anche cella elementare,
è confrontata con celle unitarie non primitive, DP (due punti reticolari) e TP (tre punti reticolari).
In tre dimensioni ogni punto ai vertici della cella conta per 1/8. Una cella elementare disegnata in maniera
tale da non avere punti reticolari ai vertici, ma un punto reticolare al suo centro, è detta cella di Wigner-Seitz.
Le regole per generare una cella di Wigner-Seitz sono molto semplici ed illustrate nella parte destra di fig. 3.2 per
un reticolo bidimensionale: partendo da un punto reticolare si tracciano delle rette verso tutti i punti reticolari
primi vicini. Si tracciano poi delle normali a questi segmenti, passanti per il punto di mezzo dei segmenti
stessi. La più piccola aerea (volume in 3 dimensioni) delimitata in questa maniera è la cella di Wigner-Seitz.
Notiamo infine che in cristallografia si usa una simbologia e delle convenzioni diverse da quelle usate in fisica (o
chimica-fisica) dello stato solido. Cosı̀ gli assi della cella unitaria vengono indicati con le lettere a, b, c invece
che con a1 , a2 , a3 .
Se consideriamo tutte le possibilità per le lunghezze e gli angoli tra i vettori che individuano una cella
elementare, otteniamo i 7 sistemi cristallini riportati in Tabella 3.1. Se consideriamo adesso i vari tipi di celle
unitarie associabili a ciascun sistema cristallino, vediamo che i tipi di cella unitaria sono anch’essi finiti, ed in
numero di 14, i 14 reticoli di Bravais riportati in fig. 3.3.
Il reticolo descrive la simmetria traslazionale del cristallo, e tra poco la descriveremo in maniera formale.
La simmmetria di una cella unitaria può essere descritta in termini delle operazioni di simmetria puntuale già
Figure 3.2: Lato sinistro: Esempi di cella primitiva (P) e di celle non primitive (DP,TP) per un reticolo
bidimensionale. Lato destro: costruzione della cella di Wigner-Seitz
3.1. RETICOLO, SIMMETRIA TRASLAZIONALE E GRUPPI SPAZIALI
Sistema
Triclino
Monoclino I
Monoclino II
Ortorombico
Tetragonale
Romboedrico
o Trigonale
Esagonale
Cubico
Relazione tra assi ed angoli
a 6= b 6= c
α 6= β 6= γ
a 6= b 6= c
α = β = 90◦ 6= γ
a 6= b 6= c
α = γ = 90◦ 6= β
a 6= b 6= c
α = β = γ = 90◦
a = b 6= c
α = β = γ = 90◦
a=b=c
α = β = γ < 120◦
a = b 6= c
α = β = 90◦ , γ = 120◦
a = b 6= c
α = β = 90◦ , γ = 120◦
a=b=c
α=β=γ
29
Simmetria essenziale
Nessun asse o piano
Un asse binario
o un piano
3 assi binari perpendicolari
o due piani perpendicolari
Un asse di
ordine 4
Un asse di ordine 3
Un asse di ordine 6
4 assi di ordine 3
Table 3.1: I sette sistemi cristallini
utilizzate per descrivere la simmetria molecolare (E, Cn , Sn , i, σ, che descrivono i gruppi puntuali). Tuttavia,
dato che le traslazioni della cella unitaria lungo gli assi reticolari devono riempire tutto lo spazio, abbiamo
certe restrizioni sulle operazioni di simmetria permesse: gli assi di rotazione possono avere solo i valori 1, 2,
3, 4, e 6 (i quasi-cristalli visti nel Capitolo 2 hanno assi di ordine 5, ma difatti non sono descritti in termini
dei reticoli). Con questa limitazione, si vede che solo 32 gruppi possono essere formati dalle operazioni che
descrivono la simmetria della cella unitaria. Queste 32 gruppi costituiscono le classi cristalline. Se consideriamo
tutta una simmetria del cristallo, in termini della teoria dei gruppi spaziali, abbiamo un totale di 230 diversi
gruppi spaziali. Ma passiamo ora ad un trattamento più dettagliato.
Sappiamo dalla teoria dei gruppi puntuali che ogni operazione di simmetria puntuale R può essere rappresentata da una matrice quadrata R. Se il vettore r individua un punto nel sistema molecolare, l’effetto di R
può essere descritto da:
r0 = Rr,
(3.2)
dove
cos φ − sin φ 0
0
R = sin φ cos φ
0
0
±1
(3.3)
(Si ricorda che σ ≡ S1 , i ≡ S2 , ed i segno + e − si applicano alle rotazioni proprie e improprie, rispettivamente). L’equazione 3.2 può essere generalizzata ad un cristallo se includiamo la possibilità di traslazione t,
non necessariamente reticolare, ma finita:
r0 = Rr + t
(3.4)
30
CHAPTER 3. I CRISTALLI E LA LORO SIMMETRIA
Figure 3.3: I 14 reticoli di Bravais
Nella notazione dovuta a Seitz, quest’ultima equazione prende la forma:
r0 = {R|t} r
(3.5)
dove {R|t} indica l’operazione di simmetria composta dalla parte puntuale e dalla parte traslazionale. Possiamo
definire il prodotto di due operatizioni:
r00 = {R0 |t0 } r0 = {R0 |t0 }{R|t} r = {R0 R|R0 t + t0 }
(3.6)
dove si fa presente che R0 t è comunque una traslazione. Parimenti si può definire l’inverso delle operazioni {R|t},
che quindi formano un gruppo, il gruppo spaziale S. L’ insieme di tutte le traslazioni pure {E|t} formano un
sottogruppo invariante di S, nel senso che ogni operazione di similitudine su membri del sottogruppo li trasforma
in altri membri del sottogruppo:
{R|t}−1 {E|t0 }{R|t} = {R−1 | − R−1 t}{E|t0 }{R|t} = {E|R−1 t0 }
(3.7)
Se le operazioni di traslazione pura sono ristrette ad essere le traslazioni reticolari, {E|tn }, l’insieme di
operazioni {E|tn } forma il gruppo di traslazione T , un altro sottogruppo invariante ed abeliano (ogni operazione
è una classe per se stessa) del gruppo S. Se limitiamo l’attenzione alla simmetria della cella unitaria, possiamo
formare il cosiddetto gruppo fattore U , che è isomorfo con il gruppo di operazioni puntuali {R|0} che definiscono
3.2. GRUPPO FATTORE
31
le classi cristalline (vedremo tra un attimo il significato di isomorfo). Formalmente il gruppo spaziale è descritto
come prodotto semi-diretto tra il gruppo fattore U e e il gruppo di traslazione:
S =U ⊗T
3.2
(3.8)
Gruppo fattore
Quindi S sono i 230 gruppi spaziali, U le 32 classi cristalline, e T i 14 reticoli di Bravais. Il sottogruppo delle
traslazioni primitive {E|tn } caratterizza solo in parte la simmetria traslazionale del cristallo. Difatti i gruppi
spaziali corrispondenti ad un dato gruppo di punti ed ad un dato reticolo di Bravais sono ulteriormente distinti
in base alla forma della parte traslazionale delle operazioni {R|t} del gruppo. Quando R = E, le operazioni
{E|t} sono necessariamente traslazioni primitive {E|tn }. Però quando R 6= E, la parte traslazionale non è
necessariamente primitiva. Tutti gli operatori di simmetria del gruppo spaziale possono essere scritti nella
forma:
{R|t} = {R|τ (R) + tn } = {R|τ (R)}{E|tn }
(3.9)
Dove tn è una traslazione primitiva, e τ (R) è o zero, o una traslazione non primitiva contenuta nella cella unitaria.
Per 73 dei 230 gruppi spaziali, τ (R) = 0, e per ogni operazione R del gruppo puntuale c’è un’operazione del
gruppo spaziale {R|0}. In questi gruppi spaziali l’intero gruppo puntuale è un sottogruppo di S. Quando
τ (R) 6= 0, le operazioni {R|τ (R)} sono traslazioni non primitive seguite da rotazioni proprie o improprie.
Queste operazioni sono gli “slittopiani” e gli “assi elicogiri”, schematizzati in fig. 3.4
Figure 3.4: Esempi di assi elicogiri (a sinistra) e di slittopiani (a destra).
La cosa importante è che alle operazioni {R|τ (R)} possono essere assegnate le stesse rappresentazioni irriducibili delle operazioni {R|0}, cioè {R|τ (R)} e {R|0} sono isomorfe. Le operazioni {R|τ (R)}, con τ (R) = 0
oppure τ (R) 6= 0 costituiscono il gruppo fattore del gruppo spaziale. Le tabelle dei caratteri del gruppo fattore
sono comunque le tabelle di uno dei 32 gruppi puntuali corrispondenti alle classi cristalline. Le informazioni
sul gruppo spaziale cui appartiene un cristallo sono in genere fornite dalle indagini strutturali ai raggi X. Anche qui, la cristallografia e la chimica fisica dello stato solido usano una diversa notazione per etichettare i
gruppi spaziali: in cristallografia si usa la notazione di Hermann-Mauguin (Internazionale), ed in chimica fisica
dello stato solido quella di Schönflies. Quest’ultima ha il vantaggio di dare immediatamente il gruppo puntuale associato al gruppo fattore. I vari gruppi fattore isomorfi con un dato gruppo puntuale sono distinti da
un diverso esponente apposto al simbolo convenzionale che etichetta il gruppo puntuale. Alcuni esempi della
corrispondenza tra la notazione di Hermann-Mauguin e quella di Schönflies sono riportati in Tabella 3.2.
32
CHAPTER 3. I CRISTALLI E LA LORO SIMMETRIA
Sistema
Triclino
Monoclino
HM
P1
P1
P2
P 21
B2
Pm
Pb
P 2/b
S
C11
Ci1
C21
C22
C23
Cs1
Cs2
4
C2h
Sistema
Ortorombico
P 21 /c
C2/c
5
C2h
6
C2h
Cubico
Tetragonale
Trigonale
Esagonale
HM
P 222
C2221
Cmm2
P mma
P 43
I4
P 31m
P6
S
D21
D25
11
C2v
5
D2h
4
C4
C45
2
C3v
1
C3h
P m3
F 43c
Th1
Td5
Table 3.2: Esempi di gruppi spaziali in notazione Hermann-Mauguin e Schönflies
3.3
Rappresentazioni irriducibili del gruppo di traslazione
Ottenere le rappresentazioni irriducibili dei gruppi spaziali ed i corrispondenti caratteri non è un compito facile.
D’altra parte nella maggior parte dei casi è sufficiente conoscere le rappresentazioni e i caratteri del gruppo
fattore, che come abbiamo detto sono le stesse dei corrispondenti gruppi puntuali isomorfi, e le rappresentazioni
del gruppo di traslazione. Il gruppo di traslazione, come il gruppo spaziale, sarebbe un gruppo di dimensione
infinita. Possiamo però assumere delle condizioni cicliche per dire che le simmetria traslazionale è mantenuta
anche per un sistema finito, sia pure di grandi dimensioni rispetto alle dimensioni atomiche. Le condizioni al
contorno sono scritte come:
(ni + Ni )ai = ni ai ,
i = 1, 2, 3
(3.10)
dove N1 , N2 ed N3 sono il numero celle elementari in ogni direzione cristallografica, e N = N1 N2 N3 il numero
totale di celle unitarie nell’unità ciclica, quindi uguale all’ordine del gruppo di traslazione T .
In termini delle delle operazioni di simmetria del gruppo di traslazioni primitive, le condizioni cicliche si
scrivono come:
{E|a1 }N1 = {E|a2 }N2 = {E|a3 }N3 = {E|0}
(3.11)
Il gruppo di traslazione T è allora il prodotto diretto T1 ⊗ T2 ⊗ T3 , con T1 , T2 , T3 i sottogruppi formati dalle
operazioni {E|ai } e le corrispondenti potenze. Tutte le operazioni di T sono commutative, ed il gruppo è
abeliano. Quindi il numero delle classi ed il numero delle rappresentazioni irriducibili è uguale all’ordine del
gruppo: ogni rappresentazione è di ordine 1, e coincide con il carattere. Il carattere di {E|0} è ovviamente
1, e allora l’intero problema è risolto se assegnamo a ciascun elemento l’appropriata potenza di una delle
N1 N2 N3 = N radici dell’unità:
µ
¶
µ
¶
µ
¶
√
2πs
2πs
2πs
N
1 = cos
+ i sin
= exp i
(3.12)
N
N
N
con s = 1 ÷ N − 1. Quindi la tabella dei caratteri del gruppo T ha N righe e N colonne con:
(k)
χtn = exp i (k · tn )
(3.13)
3.4. RETICOLO RECIPROCO
33
dove k viene detto “vettore d’onda”, ed è un vettore dello spazio reciproco, dato da:
s1
s2
s3
k=
b1 +
b2 +
b3
N1
N2
N3
(3.14)
dove b1 , b2 e b3 sono i vettori che individuano quello che viene denominato “reticolo reciproco”. I vettori b1 ,
b2 e b3 sono definiti in maniera univoca dai vettori delle reticolo diretto, sulla base delle relazioni:
b1 =
2π (a2 × a3 )
;
|a1 · (a2 × a3 )|
b2 =
2π (a3 × a1 )
;
|a2 · (a3 × a1 )|
b3 =
2π (a1 × a2 )
,
|a3 · (a1 × a1 )|
(3.15)
in maniera tale che risulti:
bi · aj = 2π δij
(3.16)
Facciamo notare espicitamente che il vettore d’onda definito nella 3.14 è un vettore dello spazio reciproco,
e non un vettore del reticolo reciproco, quest’ultimo essendo dato da:
gh = h1 b1 + h2 b2 + h3 b3
(3.17)
con h1 , h2 , h3 tre interi, mentre si /Ni dell’eq. 3.14 sono in generale delle frazioni.
Prima di discutere in maniera approfondita il reticolo reciproco e la sua relazione con il reticolo diretto,
menzioniamo che in cristallografia si segue una diversa simbologia: come i vettori del reticolo diretto sono
indicati da a, b e c, quelli del reticolo reciproco sono indicati da a∗ , b∗ e c∗ .
3.4
Reticolo reciproco
Il reticolo reciproco che abbiamo introdotto in maniera abbastanza indiretta parlando delle rappresentazioni del
gruppo di traslazione primitiva, viene probabilmente capito meglio tramite la serie di Fourier (cf. Appendice
A.2). L’asserzione che in un cristallo esiste una simmetria traslazionale significa infatti che ogni funzione relativa
al moto di particelle entro il cristallo deve essere una funzione periodica, cioè:
ψ(r) = ψ(r + tn )
(3.18)
Se consideriamo inizialmente per semplicità una sola dimensione, l’equazione precedente diviene:
ψ(x) = ψ(x + tn ),
tn = na
(3.19)
Una funzione periodica può essere convenientemente espressa in serie di Fourier (consideriamo il caso esponenziale):
X
ψ(x) =
Am exp i(2πmx/a)
(3.20)
m
con m un intero. Possiamo scrivere anche:
ψ(x) =
X
Ag exp i(gx),
(3.21)
g
avendo definito con g un vettore del reticolo reciproco in una dimensione, g = m(2π/a), ovvero ga = 2πm.
Quindi i vettori del reticolo diretto e quelli del reticolo reciproco sono connessi tra loro tramite una serie di
Fourier, il cui coefficienti sono dati da:
Z
0
1 a
ψ(x0 )eigx dx0 ,
(3.22)
Ag =
a 0
34
CHAPTER 3. I CRISTALLI E LA LORO SIMMETRIA
ottenuti moltiplicando la serie per [exp(igx)]∗ e integrando sulla cella. Tutti termini della serie si annullano
tranne il g-esimo, dato che le funzioni esponenziali sono ortonormali tra di loro.
Il tutto è facilmente generalizzabile tre dimensioni:
X
Agh eigh ·r
(3.23)
ψ(r) =
gh
con gh · tn = 2πm, cosicché exp(igh · tn ) = 1 qualunque sia tn . In tale maniera l’equazione 3.18 risulta
soddisfatta:
ψ(r + tn ) =
X
gh
Agh eigh ·(r+tn ) =
X
Agh eigh ·r eigh ·tn =
gh
X
Agh eigh ·r = ψ(r).
(3.24)
gh
Se vogliamo che gh · tn = 2πm, possiamo definire gh come delle traslazioni primitive nello spazio reciproco
(le dimensione di gh devono essere quelle di uno spazio−1 se vogliamo che l’esponenziale sia adimensionale), e
cioè:
gh = h1 b1 + h2 b2 + h3 b3
(3.25)
con b1 , b2 , b3 i vettori del reticolo reciproco già definiti nella 3.15, cosicché risulta bi · aj . I coefficienti della
serie di Fourier in tre dimensioni sono:
Z
0
1
Agh =
ψ(r0 )eigh ·r dr0
(3.26)
Vcella cella
e sono ovviamente uguali per tutte le celle.
Quindi tramite la serie di Fourier ad ogni reticolo diretto è associato un reticolo reciproco, e viceversa. Il
reticolo reciproco è, come vedremo, fondamentale nella teoria dei solidi, ed alcune delle sue proprietà geometriche
possono essere dedotte facilmente.
1. Il volume di una cella unitaria del reticolo reciproco è inversamente proporzionale al volume di una cella
unitaria del reticolo diretto:
(2π)3
,
(3.27)
Vr =
Vd
dove il fattore 8π 3 deriva da come abbiamo definito i vettori del reticolo diretto e del reticolo reciproco.
2. Ciascun vettore del reticolo reciproco è normale ad un insieme di piani reticolari del reticolo diretto.
3. Se le componenti di gh , h1 , h2 ed h3 , non hanno fattori in comune, allora gh è inversamente proporzionale
alla distanza di piani reticolari normali a gh .
La proprietà 2 si deduce facilmente dalla relazione:
gh · tn = 2πm = |gh |(|tn | cos θ),
(3.28)
cioè la proiezione di tn nella direzione di gh ha la lunghezza d:
d=
2πm
|gh |
(3.29)
3.5. TEOREMA DI BLOCH
35
Figure 3.5: Illustrazione delle proprietà del reticolo reciproco (in 2 dimesioni)
Ma c’è un numero infinito di punti del reticolo diretto con questa proprietà. Supponiamo difatti che tl sia un
altro punto reticolare rappresentato dagli interi:
l1 = n1 − rh3 ;
l2 = n2 − rh3 ;
l3 = n1 + r(h1 + h2 ),
con r un intero. Allora:
gh · tl = h1 l1 + h2 l2 + h3 l3 = h1 (n1 − rh3 ) + h2 (n2 − rh3 ) + h3 [n1 + r(h1 + h2 )] = gh · tn = 2πm
e quindi tl e tn hanno la stessa proiezione su gh , e quindi saranno sullo stesso piano normale a gh a distanza d
dall’origine. Ma se c’è un punto reticolare su questo piano c’è un numero infinito di punti reticolari: abbiamo
dunque costruito un piano reticolare normale a gh (fig. 3.5, a sinistra).
La proprietà 3 segue direttamente dalla proprietà 2, come può essere visto nella parte a sinistra della fig.
3.5, tenendo presente che se h1 , h2 , h3 non hanno fattori in comune, possiamo sempre trovare un vettore tj con
componenti gh · tj = 2π(m + 1). Allora il piano reticolare contenente tj è a una distanza d0 = 2π(m + 1)/|gh |,
cioè è ad una distanza 2π/|gh | dal piano contenente tn .
Da questi due risultanti vediamo che una maniera semplice per caratterizzare i piani del reticolo diretto è
attraverso le loro normali, espresse come vettori delle reticolo reciproco. I piani più importanti del reticolo diretto
sono quelli che hanno il maggior numero di punti reticolari. Poiché la densità di punti reticolari è costante nello
spazio, i piani più importanti sono quelli più largamente separati cioè quelli con i vettori del reticolo reciproco
più piccoli (fig. 3.5, a destra). Etichettare piani reticolari con interi h1 , h2 , h3 , che specificano gh , corrisponde
ad usare i cosiddetti indici di Miller (h1 h2 h3 ) della cristallografia classica.
3.5
Teorema di Bloch
Torniamo adesso alla simmetria cristallina e in particolare alla simmetria traslazionale per dimostrare quello
che i fisici chiamano il teorema di Bloch. Il fatto che esiste una simmetria traslazionale significa che in un
cristallo tutte le celle sono equivalenti, cioé indistinguibili. Questo significa che l’operatore hamiltoniano che
36
CHAPTER 3. I CRISTALLI E LA LORO SIMMETRIA
descrive qualunque proprietà del cristallo deve essere invariante rispetto a qualunque operazione del gruppo di
traslazioni primitive. Allora se |ψj i è un’autofunzione dell’hamiltoniano, risulterà:
{E|tn } (H|ψj i) = {E|tn }Ej |ψj i,
(3.30)
e quindi vista la commutazione [H, {E|tn }] = 0, abbiamo:
H{E|tn }|ψj i = Ej {E|tn }|ψj i
(3.31)
Quindi le funzioni ottenute operando con l’operatore {E|tn } sono ancora autofunzioni dell’ hamiltoniano con
lo stesso autovalore. In altre parole, esiste un set di funzioni che sono autofunzioni sia dell’ hamiltoniano che
dell’operatore del gruppo di traslazione. Notiamo che essendo il gruppo di traslazione Abeliano, cioè con tutte le
operazioni che commutano tra di loro, le sue rappresentazioni irriducibili sono tutte monodimensionali, e quindi
le autofunzioni di {E|tn } sono tutte nondegeneri. Gli autovalori dell’operatore {E|tn } sono facilmente ottenibili,
anzi li conosciamo già. Difatti per una funzione appartenente alla rappresentazione irriducibile k-appesima:
{E|tn }|ψk (r)i = |ψk (r + tn )i
(3.32)
Se applichiamo {E|tn } N volte (condizioni cicliche), deve essere:
{E|tn }N |ψk (r)i = |ψk (r)i
(3.33)
e quindi se si estrae la radice N -esima dell’unità:
{E|tn }|ψk (r)i = eik·tn |ψk (r)i
(3.34)
Gli autovalori degli operatori di traslazione sono dunque i caratteri delle rappresentazioni irriducibili. Per
ciò che riguarda l’ hamiltoniano dobbiamo distinguere il caso in cui le autofunzioni non sono degeneri o sono
degeneri. Se non sono degeneri queste sono evidentemente, per quanto mostrato sopra, le stesse autofunzioni
dell’operazione del gruppo di traslazione. Se sono degeneri, possiamo sempre fare delle combinazioni lineari tali
che ciascuna di queste sia autofunzione di {E|tn } con un diverso valore di k. Allora possiamo enunciare il
Teorema di Bloch - Le soluzioni non degeneri dell’equazione di Schrödinger relative ad un cristallo (potenziale
periodico), ovvero delle opportune combinazioni lineari delle soluzioni degeneri, sono anche autofunzioni |ψk (r)i
dell’operatore del gruppo di traslazioni primitive {E|tn }, con autovalori exp(ik · tn ).
Quindi dal nostro punto di vista il teorema di Bloch non è niente di nuovo ma solo un’altra applicazione della
teoria dei gruppi. Possiamo usare il vettore d’onda k per etichettare le autofunzioni e le energie dell’hamiltoniano,
per esempio scrivendo E(k), e, se le energie corrispondenti ad uno stesso k sono degeneri, Ej (k) = Ei (k).
Dal teorema di Bloch espresso dall’eq. 3.34 segue anche che, essendo {E|tn }|ψk (r)i = |ψk (r + tn )i:
|ψk (r + tn )i = eik·tn |ψk (r)i
(3.35)
E questa è una seconda forma del teorema di Bloch: l’autofunzione in due punti separati da una distanza
reticolare differisce solo per il fattore di fase exp(ik · tn ).
Supponiamo ora di non conoscere le soluzioni dell’equazione di Schrödinger. E’ facile dimostrare quanto
segue. Scriviamo la funzione d’onda come:
|ψk (r)i = eik·r uk (r)
(3.36)
3.5. TEOREMA DI BLOCH
37
dove per esempio uk (r) può essere una funzione che vogliamo poi ottimizzare tramite il metodo variazionale.
Sostituendo nell’equazione 3.35 abbiamo:
eik·(r+tn ) uk (r + tn ) = eik·(tn +r) uk (r),
e quindi:
uk (r + tn ) = uk (r)
(3.37)
Quindi la nostra funzione di prova deve essere periodica con la periodicità del reticolo. Quindi se vogliamo
trovare le autofunzioni relative ad una particella, per es. un elettrone, all’interno del cristallo, basterà scegliere
come funzione di prova una funzione periodica con periodicità del reticolo, per es. un orbitale centrato attorno
a ciascun punto reticolare, e poi moltiplicarla per exp(ik · r). Questo non è altro che la costruzione delle funzioni
adattate per simmetria (SALC), secondo il metodo già incontrato nella soluzione dell’ eq. di Schrödinger relativa
ad una molecola.
Quanto sopra riguarda le soluzioni dell’equazione di Schrödinger indipendente dal tempo. Sappiamo peraltro
che le soluzioni complete, includenti anche la parte temporale, per un sistema stazionario si scrivono come:
i
Ma E = ~ω, e quindi:
|Φk (r, t)i = |ψk (r)ie− ~ Et
(3.38)
|Φk (r, t)i = uk (r)eik·r e−iωt = uk (r)ei(k·r−ωt)
(3.39)
e questa è l’equazione di un’onda come descritto nell’Appendice A.1. Il vettore k che contraddistingue la
rappresentazione irriducibile del gruppo di traslazione s’identifica dunque con il vettore d’onda, e la natura
ondulatoria delle soluzioni dell’hamiltoniano del cristallo è una conseguenza diretta della simmetria traslazionale.
38
CHAPTER 3. I CRISTALLI E LA LORO SIMMETRIA
Chapter 4
Simmetria e transizione di fase
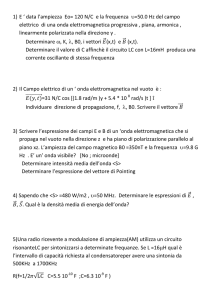
In questo capitolo vediamo come la simmetria puo aiutarci anche nella comprensione di fenomeni complessi
quali le transizioni di fase. Una previsione che si può fare facilmente sulla base della simmetria è che essendo
l’hamiltoniano del sistema in esame invariante rispetto alle operazioni di simmetria del gruppo cui appartiene,
anche tutti i risultati di misure compiute su questo sistema debbono godere della stessa proprietà. Ne segue che
per il sistema in oggetto si possono avere valori d’attesa non nulli soltanto per le osservabili che trasformano
secondo la rappresentazione totalsimmetrica del gruppo di simmetria del sistema stesso. E’ allora facile prevedere
per esempio l’assenza di momento di dipolo permanente in sistemi centrosimmetrici.
In realtà esistono dei sistemi in cui mentre l’hamiltoniano è invariante rispetto tutte le operazione del
gruppo, esiste almeno un’osservabile che, pur trasformando secondo una rappresentazione irriducibile non totalsimmetrica, ha un valore di attesa non nullo. Questi sistemi (detti a simmetria rotta, o broken symmetry)
sono caratterizzati da un hamiltoniano il cui stato più basso in energia ha una simmetria inferiore a quella
dell’hamiltoniano stesso. Più precisamente, in questi sistemi esiste una grandezza Q, non totalsimmetrica, che
in assenza di rottura di simmetria ha valore medio nullo, mentre in caso di rottura di simmetria assume un
valore medio diverso da zero. La simmetria dell’hamiltoniano è in realtà riflessa dal fatto che in generale esistono
diversi stati fondamentali degeneri con diversi valori di hQi i quali nel loro insieme conservano la simmetria del
sistema. L’energia potenziale di questi sistemi a simmetria rotta è descritta da una curva con due o più minimi
come mostrato in fig. 4.1 Esempio classico di un sistema a simmetria rotta è quello in cui Q è una coordinata
vibrazionale e lo stato elettronico è uno stato degenere. In questo caso come è noto si può avere la distorsione
di Jahn-Teller. Ciò premesso, vediamo come questi concetti e la simmetria in generale ci aiutino a inquadrare
in termini generali le transizioni di fase che possono avvenire in un solido cristallino.
Le transizioni di fase sono fenomeni repentini (catastrofi in senso fisico) durante i quali, al variare delle
condizioni esterne, una fase si trasforma in una nuova fase che differisce qualitativamente e/o quantitativamente
dalla precedente. Se si osserva una transizione di fase dev’esserci almeno un’osservabile, che indichiamo con η,
che si modifichi nel passaggio fra le due fasi. Tale grandezza è detta parametro d’ordine. Nel caso in cui la
differenza tra le fasi sia puramente quantitativa, nel senso che non implichi un cambio di simmetria, per poter
osservare una transizione di fase occorre che η cambi con discontinuità da un valore ad un altro. Esempio molto
familiare di questo tipo di transizione è la transizione gas-liquido, dove il parametro d’ordine è rappresentato
dalla densità. A conferma della richiesta di una variazione discontinua del parametro d’ordine per poter avere
una transizione di fase nel caso non ci sia rottura di simmetria, ricordo come la curva della transizione di fase
gas-liquido termini alle alte temperature e pressioni in un punto critico (Tc , pc ), al di là del quale non è più
39
40
CHAPTER 4. SIMMETRIA E TRANSIZIONE DI FASE
Figure 4.1: Potentiali a più minimi caratterizzanti i sistemi a broken symmetry.
possibile distinguere due fasi, dal momento che non si osserva più alcuna discontinuità nella densità.
Venendo al caso di fasi qualitativamente diverse, esse devono necessariamente differenziarsi per simmetria. Il
parametro d’ordine deve allora essere in grado di abbassare, cioè rompere, la simmetria della fase più simmetrica,
ovverosia deve trasformare come una rappresentazione irriducibile non totalsimmetrica del gruppo di simmetria
di quella fase. Ne segue che η deve annullarsi nella fase simmetrica, mentre assume valori diversi da zero nella
fase a bassa simmetria. In questo caso una transizione di fase può ancora avvenire in maniera discontinua con
una variazione finita di η, ma può anche essere continua perché le due fasi sono comunque distinguibili. La
differenza qualitativa tra le due fasi, la loro distinguibilità, chiaramente esclude la possibilità di avere un punto
critico per le transizioni con rottura di simmetria.
Come è noto, le transizioni di fase discontinue vengono dette transizioni di primo ordine, e ad esse è associata
una discontinuità nelle derivate prime dell’energia libera di Gibbs rispetto alle variabili termodinamiche temperatura e pressione, cioè entropia e volume. Le transizioni di fase continue, alle quali è associata una discontinuità
nelle derivate seconde dell’energia di Gibbs (calore specifico e compressibilità), sono dette del secondo ordine.
Risulta allora che solo le transizioni con rottura di simmetria possono essere del secondo ordine. La fig. 4.2
illustra la diversa variazione del parametro d’ordine per transizioni di primo e secondo ordine.
Un trattamento teorico dettagliato delle transizioni di fase di primo ordine è in genere assai difficile, proprio
a causa della loro discontinuità. Invece la teoria della transizioni di fase del secondo ordine è stata sviluppata
negli anni 30 da Landau ed nota appunto come teoria di Landau. Per motivi di concretezza consideriamo una
transizione di fase che avvenga in un cristallo mantenendo costante la pressione e facendo variare la temperatura.
Allora la condizione di equilibrio termodinamico è data dalla funzione energia libera di Gibbs G. Supponiamo
inoltre che la transizione di fase del secondo ordine implichi il cambio di gruppo di simmetria cristallino da
1
(P 2/m) a C2 (P 2) all’ abbassarsi della temperatura. Questo cambiamento di simmetria può essere dovuto
C2h
41
Figure 4.2: Variazione del parametro d’ordine in funzione della temperatura. (a) Transizione del primo ordine;
(b) Transizione del secondo ordine; (c) Transizione del primo ordine vicina al secondo ordine.
ad una distorsione (variazione nella posizione di equilibrio) di alcuni atomi nel cristallo. Il parametro d’ordine
può allora essere preso come lo spostamento di atomi dalla posizione di equilibrio nella fase ad alta temperatura
alla posizione di equilibrio nella fase a bassa temperatura. Questo tipo di transizioni si chiamano transizioni
displacitive, distinte dalle transizioni disordine-ordine in cui la fase ad alta simmetria è data dalla sovrapposizione
disordinata di due strutture ugualmente distorte in senso opposto.
La funzione energia libera di Gibbs è considerata funzione della temperatura e del parametro d’ordine. Il
verificarsi della transizione di fase può essere descritto come segue: la funzione G(η) ha un minimo a η = 0
nella fase simmetrica ad alta temperatura, e ad η 6= 0 nella fase non simmetrica. In quest’ultimo caso, per
quanto detto all’inizio, la G(η) deve esibire due o più minimi. Deve essere sottolineato che la funzione G(η)
è determinata non solo per la fase non simmetrica ma anche per quella simmetrica. Questo impone delle
limitazioni importanti sulla forma della dipendenza di G da η. L’energia libera di Gibbs difatti è una quantità
scalare che caratterizza le proprietà fisiche del cristallo, e quindi dev’essere invariante rispetto ad ogni operazione
di simmetria della fase simmetrica:
G(η) = G(η ‡ )
(4.1)
dove η ‡ è il parametro d’ordine trasformato dall’operazione di simmetria.
In vicinanza della transizione di fase di secondo ordine ci possiamo limitare ad analizzare piccole distorsioni
del reticolo, ovverosia piccole variazioni del parametro d’ordine. E’ pertanto naturale considerare l’espansione
del potenziale termodinamico in serie di Taylor sul parametro d’ordine:
µ
G(p, T, η) =
=
G0 +
G0 +
∂G
∂η
¶
µ
η+
η=0
∂2G
∂η 2
¶
µ
η2 +
η=0
A(p, T ) η
2
∂3G
∂η 3
¶
µ
η3 +
η=0
+ C(p, T ) η
3
∂4G
∂η 4
¶
η 4 + ..
η=0
4
+ B(p, T ) η + ...
(4.2)
42
CHAPTER 4. SIMMETRIA E TRANSIZIONE DI FASE
Questa equazione deve evidentemente soddisfare la condizione 4.1. G(η) dipende dalla pressione e dalla
temperatura come parametri. Quindi anche i vari termini della serie dipenderanno dalla p e T . Nell’esempio che
abbiamo fatto sopra, all’abbassarsi della simmetria vengono persi il centro d’inversione e il piano di simmetria.
Ciò è associato al fatto che a causa della distorsione del reticolo questi elementi fanno cambiare il segno di η
nella fase a bassa temperatura, e quindi non entrano nel gruppo di simmetria della fase stessa. Quindi le leggi
di trasformazione del parametro d’ordine sono:
C2h
Au
E
η
C2
η
i
-η
σ
-η
Questo vuol dire che il termine del primo ordine nell’espansione deve essere uguale a zero, altrimenti il valore
dell’energia di Gibbs cambierebbe segno sotto le operazioni i e σ, il che contraddice la condizione 4.1. Quindi il
primo termine diverso da zero e dipendente da η nel potenziale termodinamico è il termine quadratico in η, del
tipo A(T )η 2 dove A(T ) è una certa funzione della temperatura (a pressione costante: d’ora in poi ometteremo
il parametro p). La condizione di minimo per G nel punto η = 0 impone in tale fase A > 0, mentre nella fase a
bassa simmetria il punto η = 0 deve essere un punto di massimo, cosicché A < 0. Allora alla transizione A = 0.
Se vogliamo che la funzione G(η) abbia un minimo finito a η = 0, occorre considerare anche gli altri termini
nell’espansione in serie. Sempre per ragioni di simmetria il termine al terzo ordine non può esistere (C = 0)
perché cambia di segno con il centro di inversione e con il piano di simmetria. Il termine successivo è quindi
il quartico, con B > 0 se vogliamo che la fase ad alta T sia stabile. Possiamo allora affermare che condizione
necessaria ma non sufficiente, perché una transizione di fase, descritta da un parametro d’ordine che trasformi
secondo la rappresentazione irriducibile Γ del gruppo che descrive la fase simmetrica, sia del secondo ordine, è
che Γ3 non contenga la rappresentazione totalsimmetrica del gruppo. Questa condizione è nota sotto il nome di
condizione di Landau. In definitiva il potenziale termodinamico assume la forma seguente:
G(T ) = G0 (T ) + A(T )η 2 + B(T )η 4 + ....
(4.3)
Dal momento che A(T ) varia con continuità e cambia segno attorno alla temperatura critica Tc della transizione di fase, è possibile espanderla in serie attorno a tale punto. La stessa cosa possiamo fare per B:
A(T ) =
B(T ) =
A(Tc ) + A0 (T − Tc ) + (1/2)A00 (T − Tc )2 + ...
B(Tc ) + B 0 (T − Tc ) + (1/2)B 00 (T − Tc )2 + ...
(4.4)
Tenendo conto che A(Tc ) = 0 e B(Tc ) > 0, e mantenendo i primi due termini nell’espansione abbiamo (trascurando i termini di ordine superiore):
G(T, η) = G0 (T ) + (1/2)α(T − Tc )η 2 + (1/4)βη 4 + ...
(4.5)
dove α = 2A0 e β = 4B(Tc ). Adesso possiamo imporre le condizioni di equilibrio su G, cioè (∂G/∂η) = 0 e
(∂ 2 G/∂η 2 ) > 0. Evidentemente, ηeq = 0 per T > Tc , mentre
s
ηeq = −
α(T − Tc )
β
per T < Tc . Allora la funzione termodinamica di equilibrio vale:
43
Figure 4.3: Evoluzione dell’energia libera di Gibbs per una transizone del secondo ordine, con C = 0.
(
G(T ) =
G0 (T )
G0 (T ) −
perT > Tc
[α(T −Tc )]2
4β
perT < Tc
(4.6)
L’andamento di η in funzione della temperatura è riportato in fig. 4.2 (b), mentre la corrispondente evoluzione
di G(T ) è mostrata in fig. 4.3 Da tale figura si ricava immediatamente come per una transizione del secondo
ordine non può presentarsi il fenomeno dell’isteresi. Dato l’andamento di G in funzione di T si possono poi
ricavare l’entropia e la capacità termica, S = −(∂G/∂T ), cp = T (∂S/∂T ), e si ricava immediatamente che S è
continua intorno a Tc , mentre la capacità termica presenta una discontinuità.
Se nell’espansione dell’energia libera compare anche il termine cubico in η, allora le curve nell’intorno di Tc
assumono la forma riportata in fig. 4.4 E’ chiaro che in questo caso η varia con discontinuità nell’intorno di Tc
(la transizione è di primo ordine) ed inoltre si può avere il fenomeno dell’isteresi.
Come detto sopra, la condizione C = 0 è una condizione necessaria, ma non sufficiente affinchè la transizione
sia di secondo ordine. Difatti, se C = 0, certamente la transizione non è di secondo ordine, come appena visto,
mentre se C = 0 possiamo pur sempre avere la situazione rappresentata in figura, in cui B = 0, ed è allora
necessario fare l’espansione fino alla sesta potenza in η. L’evoluzione di G è riportata in fig. 4.5 La transizione è
di primo ordine, seppure viene detta “vicino ad una secondo ordine”, vista la variazione del parametro d’ordine
riportata in fig 4.2(c). A pressioni diverse, la transizione di primo ordine prossima alla secondo ordine può
diventare propriamente di secondo ordine.
44
CHAPTER 4. SIMMETRIA E TRANSIZIONE DI FASE
Figure 4.4: Evoluzione dell’energia libera per una transizione del primo ordine, in cui C 6= 0.
Figure 4.5: Evoluzione dell’energia libera per una transizione del primo ordine “vicino ad un secondo ordine”,
in cui C = 0, B = 0.
Chapter 5
Vibrazioni nei cristalli. Fononi
Nella Appendice A.1 sono riassunti gli elementi basilari della descrizione matematica di un’onda. Sappiamo
anche che, da un punto di vista fisico, un’onda rappresenta la propagazione di un “disturbo” (variazione di
pressione, intensità, i campi elettrici ecc.) rispetto ad una situazione di equilibrio. Nella propagazione del
disturbo dunque non si propaga la materia, ma l’energia e il momento.
Un’onda che si propaga in un mezzo materiale si dice elastica se si propaga ad una velocità c che dipende
solo dalle proprietà del materiale stesso. Se invece la velocità dipende dalla lunghezza d’onda λ, ovverosia
dalla frequenza, si dice che c’è dispersione nella propagazione. Per esempio, se un’onda costituita da diversi
modi armonici di diversa λ viene a trovarsi in un mezzo dispersivo, l’onda viene distorta, perché ciascuna delle
componenti si propaga con velocità diversa. Esempio tipico di onda elastica sono le onde sonore: per questo
spesso si usa (abbastanza impropriamente) il termine onda acustica come sinonimo di onda elastica. Un’onda
sonora non è che il propagarsi di una compressione (variazione della distanza tra gli atomi) attraverso il mezzo.
In un fluido possono esistere solo onde sonore longitudinali, mentre in un solido possono propagarsi anche onde
trasversali.
Se trattiamo il propagarsi di un’onda sonora in un solido isotropo da un punto di vista macroscopico,
troviamo che le velocità è data da:
p
c = Y /%,
(5.1)
dove % è la densità del solido, e Y una costante propria del solido, detta modulo di Young o costante di
elasticità. Il modulo di Young può essere misurato indipendentemente da c, sottoponendo il solido stesso ad
una certa pressione F/A e misurandone la deformazione. Misure indipendenti di Y e c dimostrano che la
relazione 5.1 è soddisfatta con c costante, fintantoché λ è grande rispetto alle distanze interatomiche. Se λ è
confrontabile alla distanza, la velocità non è più costante ma tende diminuire: il modello macroscopico, che
considera solo spostamenti macroscopici, viene ovviamente a cadere quando lo spostamento comprende solo
pochi atomi alla volta. Dovremo allora tener conto della natura corpuscolare della materia, e dato che un’onda
sonora implica la variazione della distanza interatomica (il disturbo) rispetto alla posizione di equilibrio. Il
problema che dobbiamo affrontare è allora quello delle vibrazioni nei cristalli. Nel limite di grandi lunghezza
d’onda dovremmo ovviamente ritrovare il risultato macroscopico.
Come nel caso delle vibrazioni nelle molecole, affrontiamo prima il problema da un punto di vista classico,
passando poi alla soluzione quanto-meccanica. Adottando l’approssimazione armonica, si tratta anzitutto di
trovare le coordinate normali, secondo cui il moto vibrazionale è separato in tanti moti oscillatori indipendenti.
Come nel caso delle molecole il sistema di coordinate di partenza è un sistema di coordinate con l’origine nel
45
46
CHAPTER 5. VIBRAZIONI NEI CRISTALLI. FONONI
baricentro del cristallo stesso, e che ruota e trasla con il cristallo. Quindi per un cristallo costituito da N nuclei
i gradi di libertà vibrazionali sarebbero 3N − 6. Abbiamo però visto nel Cap. 3 che per sfruttare le proprietà di
simmetria traslazionale, è conveniente usare le condizioni cicliche di periodicità. Ciò corrisponde a trattare non
intero cristallo finito, ma un frammento all’interno del cristallo stesso (con N comunque molto grande, circa
1023 atomi), cosı̀ da ignorare le superfici del cristallo. Allora le traslazioni e rotazioni del frammento cristallino
avvengono all’interno del cristallo stesso, e quindi sono anch’esse gradi di libertà vibrazionali. Pertanto se
consideriamo un cristallo costituito da N atomi, i gradi di libertà vibrazionali sono 3N .
5.1
Catena monoatomica
Per cominciare, consideriamo un sistema estremamente semplificato, e cioè una catena lineare di atomi uguali,
separati dalla distanza a nella posizione di equilibrio:
Abbiamo dunque un reticolo monodimensionale, con un atomo per cella elementare. Sia un lo spostamento
dell’ennesimo atomo dalla posizione di equilibrio, spostamento che considereremo possibile solo lungo la catena
(onda longitudinale). Abbiamo dunque N gradi di libertà vibrazionali. Supponiamo inoltre che ci siano forze
elastiche solo fra atomi adiacenti. Dato che gli atomi sono tutti uguali, le costanti di forza F sono tutte uguali
tra loro. Allora la forza esercitata sull’atomo n-esimo dall’atomo (n-1)-esimo è: φn = F (un − un−1 ), e quella
esercitata dall’atomo (n+1)-esimo: φn+1 = F (un+1 − un ). La forza risultante φn+1 − φn è uguale al prodotto
della massa per l’accelerazione ün dell’atomo n-esimo:
mün = F (un+1 − 2un + un−1 ),
(5.2)
e abbiamo tante espressioni di questo tipo, quanti sono gli atomi nella catena. Per risolvere queste N equazioni
del moto, usiamo una soluzione nella forma data dal teorema di Bloch, cioè:
un = A exp i(q · tn − ωt),
(5.3)
dove abbiamo usato la lettera q per etichettare il vettore d’onda, e dove tn = na è il vettore che individua la
posizione di equilibrio dell’n-simo atomo. Difatti, possiamo avere ampiezza di oscillazione solo nella posizione
occupata da un atomo, quindi invece di r usiamo tn . Sostituendo nell’equazione del moto otteniamo:
−ω 2 m exp i(qna − ωt) = F {exp i[q(n + 1)a − ωt] − 2 exp i(qna − ωt) + exp i[q(n − 1)a − ωt]}
(5.4)
cioè
−ω 2 m = F {exp(iq · a) − 2 + exp(−iq · a)} = 2F (cos q · a − 1).
La soluzione è dunque:
ω2 = 4
³q · a´
F
sin2
m
2
(5.5)
(5.6)
5.1. CATENA MONOATOMICA
47
ovvero
r
ω=2
F ¯¯ ³ q · a ´¯¯
¯sin
¯
m
2
(5.7)
p
C’ è dunque una frequenza massima, ω = 2 F/m, per le onde vibrazionali che si propagano lungo la
catena. Per frequenze superiori a questo valore q deve essere immaginario: abbiamo allora un moto che decade
esponenzialmente, e non si propaga. Quindi solo onde inferiori ad una certa frequenza (superiori ad una certa
lunghezza d’onda) possono propagarsi. Notiamo che n non compare nella soluzione, cioè le equazioni del moto
portano alla stessa relazione tra ω e q, il che prova che la nostra soluzione è effettivamente la soluzione delle
equazioni del moto.
Anche se abbiamo detto che la catena ha N atomi, non abbiamo finora visto come questo influenzi le
soluzioni che abbiamo trovato, che però godono della simmetria traslazionale, avendo imposto la forma di
Bloch. Ci sono due modi di stabilire le condizioni al contorno. Il primo è di considerare la catena lunga
quanto il cristallo unidimensionale. In questo modo però perdiamo la simmetria traslazionale. Allora le onde
vengono riflesse indietro dagli atomi terminali, che sono logicamente assunti come non liberi di muoversi. Le
onde assumono dunque il carattere di onde stazionarie. L’altra condizione è quella di Born-von Karman, che ci
riporta a considerare il cristallo come infinito. Si immagina infatti che la catena di N a atomi faccia parte di
un reticolo infinito: gli atomi terminali non sono più immobili, e le onde sono onde viaggianti che si propagano
indefinatamente nel mezzo. Noi imponiamo che ci sia una periodicità a lungo raggio nelle oscillazioni, cioè un =
u(n+N ) . Quindi imponiamo che il movimento ondulatorio si riproduca periodicamente, con periodo N a, cioè
dopo N celle elementari. Questa condizione ciclica può essere facilmente visualizzata nel caso unidimensionale,
immaginando la nostra catena di N atomi come disposta a formare un cerchio, cosicché l’N -esimo atomo coincide
con il primo. Tale visualizzazione viene a cadere se abbiamo più di una dimensione, ma matematicamente la
condizione può essere sempre imposta.
Utilizzando la condizione ciclica di Born-von Karman alle nostre soluzioni dobbiamo avere
exp i(nq · a) = exp i[(n + N )q · a],
(5.8)
da cui exp i(N q · a) = 1, cioè N q · a = 2πs, con s un intero. Quindi:
|q| =
2πs
,
Na
ovvero
q=
s
b
N
(5.9)
dove b è un vettore tale che b · a = 2 π, cioè è il vettore unitario di reticolo reciproco del nostro reticolo lineare.
D’altra parte se adesso consideriamo la nostra soluzione 5.7, vediamo che essa è una funzione periodica del
vettore d’onda, ovvero otteniamo la stessa soluzione se a |q| sostituiamo |q| + 2πl/|a|, con l un intero. Pertanto
otteniamo tutte le possibili soluzioni per ω se, con l = 1, limitiamo i valori di q a:
−
ovvero:
π
π
<q≤ ,
a
a
(5.10)
b
b
<q≤ ,
(5.11)
2
2
cioè se limitiamo il vettore d’onda a essere interno alla cella primitiva (scelta del tipo Wigner-Seitz) del reticolo
reciproco: si dice che il vettore q deve essere contenuto nella “prima zona di Brillouin”. Risulta allora che
−N/2 < s ≤ N/2, cioè abbiamo in tutto N diversi possibili valori di s, ovverosia N diversi valori di q. Il vettore
−
48
CHAPTER 5. VIBRAZIONI NEI CRISTALLI. FONONI
d’onda non può dunque avere valore qualsiasi, ma deve essere un vettore compreso nella prima zona di Brillouin,
e avere i valori dati da q = (s/N )b. In tutto abbiamo dunque N possibili soluzioni delle nostre equazioni del
moto, ciascuna delle quali ha una precisa frequenza di vibrazione ω. Le soluzioni sono i modi normali, e sono
N , quanti sono i gradi di libertà vibrazionale del nostro cristallo monodimensionale.
Figure 5.1: Curva di dispersione per una catena monoatonica. A destra sono raffigurati gli autovettori per
q = 0, q = π/a, e ad un valore intermedio. Per chiarezza di rappresentazione gli spostamenti sono mostrati
come spostamenti trasversali invece che longitudinali.
La soluzione 5.7 delle equazioni del moto, detta curva di dispersione, è riportata in fig. 5.1. Analizziamo più
in dettaglio le soluzioni trovate nel limite q · a ¿ 1, cioè per λ À a. In questo limite sin(q · a/2) ' q · a/2, e la
relazione di dispersione si riduce a:
r
F
ω=
q · a,
(5.12)
m
p
e la velocità ω/q risulta costante, c = a F/m. Pertanto per grandi lunghezza d’onda rispetto alla distanza
interatomica non c’è dispersione, cioè la velocità di propagazione non dipende da λ. I corrispondenti spostamenti
degli atomi sono rappresentati nella parte destra di fig. 5.1 (per chiarezza di rappresentazione gli spostamenti
sono mostrati come spostamenti trasversali). Come si vede tutti gli atomi si spostano con la stessa fase: il moto
corrisponde ad una oscillazione di tipo traslatorio. Quindi a grandi lunghezza d’onda ritroviamo il risultato
macroscopico.
Per lunghezza d’onda più corte, cioè per q maggiori, l’equazione 5.7 ci fornisce la dispersione:
dω
=a
c=
dq
r
³q · a´
F
cos
m
2
(5.13)
5.1. CATENA MONOATOMICA
49
Quando q = π/a, cioè al limite della prima zona di Brillouin, c = 0, e abbiamo un’onda stazionaria. I
corrispondenti spostamenti degli atomi sono riportati in fig. 5.1: gli atomi alternanti oscillano in antifase, ed i
nodi sono in posizione fissa.
Figure 5.2: In alto: curva di dispersione di una catena monotaomica nello schema a zona ripetuta; in basso:
spostamenti atomici per q = 8π/7a (linea continua, seconda zona di Brillouin) e q = 6π/7a (linea tratteggiata,
prima zona di Brilluoin).
Torniamo un momento sul significato che ha il limitare i valori di q al campo compreso nella prima zona di
Brillouin. In figura 5.2 è riportata la funzione ω(q) per q oltre alla prima zona di Brillouin. Consideriamo
uno spostamento istantaneo degli atomi per un q un po’ più grande di q = π/a, il limite della prima zona di
Brillouin. Per esempio, consideriamo q = 8π/7a, corrispondente al punto A in figura 5.2. La corrispondente
oscillazione degli atomi è mostrata nella parte in basso della figura. D’altra parte questo stesso insieme di
spostamenti degli atomi può essere rappresentato ugualmente bene da una curva con una lunghezza d’onda più
grande (curva tratteggiata), per la quale q = 6π/7a, che corrisponde ai punti B oppure C in figura 5.2. Allora
i punti A, B, e C rappresentano gli stessi spostamenti atomici istantanei, e la stessa frequenza di vibrazione.
Nel punto B, dω/dq = c > 0, cosicché l’ onda viaggia verso destra. A e C invece rappresentano entrambi
un’onda che viaggia verso sinistra, e sono allora completamente equivalenti. Pertanto concludiamo dicendo che
aggiungere un qualunque multiplo di 2π/a a q non altera gli spostamenti atomici che stiamo descrivendo, né la
velocità dell’ onda, e quindi non è una soluzione addizionale. Pertanto è sufficiente considerare il solo campo
−π/a < q ≤ π/a, che contiene N modi di vibrazione.
50
CHAPTER 5. VIBRAZIONI NEI CRISTALLI. FONONI
5.2
Catena biatomica
Consideriamo adesso una catena lineare costituita da due tipi diversi di atomi di massa m ed M , e diverse
distanze di legame. La cella primitiva, di dimensione a, contiene quindi due atomi, e chiamiamo F e f le
costante di forza del legame m − M e del legame M − m, rispettivamente. Se abbiamo a che fare con un
cristallo di tipo ionico, come NaCl in una dimensione, le distanze (e quindi le costanti di forza) saranno uguali;
se abbiamo un polimero come il poliacetilene, le masse saranno uguali e le costanti di forza diverse; infine in un
cristallo di tipo molecolare, tipo IBr, sia le masse che le costanti di forza saranno diverse. Seguendo lo stesso
procedimento che abbiamo usato per la catena monoatomica possiamo scrivere le equazioni del moto, che questa
volta saranno le due tipi diversi (gli atomi di massa m occupino le posizioni pari, quelli di massa M le posizione
dispari):
mü2n = −f (u2n − u2n−1 ) + F (u2n+1 − u2n )
M ü2n+1 = −F (u2n+1 − u2n ) + f (u2n+2 − u2n+1 )
(5.14)
(5.15)
Cerchiamo soluzioni della forma:
u2n = A2n exp i(2nq · a − ωt)
u2n+1 = A2n+1 exp i[(2n + 1)q · a − ωt]
(5.16)
(5.17)
La sostituzione di queste equazioni in quelle originarie porta alla seguente coppia di equazioni lineari ed omogenee
nelle ampiezze incognite A2n ed A2n+1 :
³
h
³ q · a´
£ 2
¤
q · a ´i
+ f exp −i
A2n+1 = 0
(5.18)
ω m − (F + f ) A2n + F exp i
2
2
³
´i
h
³ q · a´
£
¤
q·a
+ F exp −i
A2n + ω 2 M − (f + F ) A2n+1 = 0
(5.19)
f exp i
2
2
Queste due equazioni ammettono soluzione diverse da quella banale solo se il determinante dei coefficienti si
annulla:
¯
¯
¯
F + f − ω2 m
−[F exp i(q · a/2) + f exp −i(q · a/2)] ¯¯
¯
(5.20)
¯ −[F exp i(q · a/2) + f exp −i(q · a/2)]
¯=0
f + F − ω2 M
Le radici di queste equazione di secondo grado in ω 2 sono:
µ
¶ sµ
¶2 µ
¶2
F
+
f
F +f
1
1
1
1
Ff
q·a
2
ω± =
+
±
+
−4
sin2
2
m M
2
m M
mM
2
(5.21)
Ci sono dunque due valori delle frequenze angolari (le soluzioni sono due, e non 4, perché ω deve essere positivo),
ω+ ed ω− , in corrispondenza ad un sol valore di q. Dalla soluzione generale precedente possiamo facilmente
ricavare i due casi particolari, e cioè:
5.2. CATENA BIATOMICA
51
F =f
¶ sµ
¶2
µ 1
1
1
1
4
q · a
2
ω±
=F
+
±
+
−
sin2
m M
m M
mM
2
(5.22)
e m=M
2
ω±
=
1
m
r
½
(F + f ) ±
(F − f )2 + 4F f cos2
q·a
2
¾
(5.23)
Le corrispondenti curve di dispersione sono riportate in fig. 5.3.
Figure 5.3: Curve di dispersione per una catena biatomica, sia per il caso F = f (a sinistra) che per M = m (a
destra). Per il caso F = f si riportano anche gli autovettori al centro ed al limite della prima zona di Brillouin.
Esaminiamo ora alcune delle soluzioni più significative dell’equazione 5.22, quella per F = f . Per q che
tende a zero, qa ¿ 1 e sin(qa/2) ≈ (qa/2). Dopo una serie di riarrangiamenti otteniamo:
2
ω+
'
2F (M + m)
mM
(5.24)
2
ω−
'
F q 2 a2
2(m + M )
(5.25)
(5.26)
52
CHAPTER 5. VIBRAZIONI NEI CRISTALLI. FONONI
sostituendo questi valori di ω 2 nelle equazioni 5.19, possiamo trovare il rapporto tra le ampiezze:
2
ω+
−→
2
ω−
−→
M
A2n
=−
A2n+1
m
(5.27)
A2n
=1
A2n+1
(5.28)
(5.29)
Allora per ω+ i due atomi M ed m oscillano in opposizione di fase, mentre il loro baricentro resta fermo, e la
frequenza è uguale alla frequenza
di un oscillatore armonico di massa ridotta µ = (m + M )/(mM ) e costante
p
di forza 2F , cioè ω+ = 2F/µ. La velocità dω/dq = 0, cioè si ha un’onda stazionaria. La soluzione per
ω− somiglia invece
p alla soluzione già trovata per il reticolo monoatomico, cioè troviamo una velocità costante,
c = ω/q = (a/2) (2F )/(m + M ), e gli atomi hanno tutti circa la stessa ampiezza e fase. Abbiamo dunque
un’onda elastica che si propaga a velocità costante, e ciò che conta è solo la massa media (m + M )/2: il suono
è un fenomeno macroscopico, e il risultato è essenzialmente lo stesso che per una catena monoatomica. Gli
autovettori sono riportati nella parte sinistra della fig. 5.3, in basso.
Sempre per F = f , ed al limite della prima zona di Brillouin, q = π/a = b/2, abbiamo sin(q · a/2) = 1 e
dunque:
2
ω+
'
2F
m
(5.30)
2
ω−
'
2F
M
(5.31)
(5.32)
che sostituite nell’equazione delle ampiezze danno A2n /A2n+1 = ∞ e A2n /A2n+1 = 0, rispettivamente. Nella
prima soluzione m oscilla ed M è fermo, e quindi la frequenza dipende solo da m; nella seconda soluzione m è
fermo, e M oscilla. In entrambi i casi la velocità è nulla. Gli autovettori sono riportati nella parte sinistra della
fig. 5.3, in alto.
Abbiamo dunque visto le soluzioni al centro e bordo zona, corrispondenti alle curve di dispersione riportate
nella fig. 5.3. La curva che corrisponde a ω− è chiamata ramo acustico. In effetti vicino a q = 0, ω− → 0, e
la curva rappresenta delle onde elastiche, con velocità indipendente dalla frequenza, che arriva nel range delle
frequenze udibili. Le onde elastiche longitudinali corrispondono alle onde sonore. La curva corrispondente a ω+
ha sempre frequenze diverse da zero, anche per grandi lunghezze d’onda, e viene detta ramo ottico. Il nome
deriva dal fatto che a q = 0 si hanno vibrazioni dei due atomi in opposizione di fase. Nei cristalli ionici ciò si
traduce nella presenza di forti momenti dipolo oscillante, che interagiscono fortemente con il campo elettrico
della radiazione elettromagnetica. Le frequenze di vibrazione del ramo ottico corrispondono a frequenze della
radiazione elettromagnetica che cadono nella zona dell’infrarosso.
E’ istruttivo a questo punto studiare il passaggio dalla catena monoatomica a quella diatomica. Partiamo
dalla catena monoatomica, e supponiamo di usare una cella unitaria contenente due atomi, ignorando il fatto
che le due masse sono uguali. Chiamiamo a0 le dimensioni della nuova cella, mantenendo il simbolo a per
la vecchia cella con un solo atomo (a0 = 2a). Avendo due atomi per cella, abbiamo due rami, ma se le due
masse sono uguali, i rami ottico ed acustico convergono ad uno stesso punto al bordo zona (vedi fig. 5.4 (a)).
Se confrontiamo questo con il risultato ottenuto con la cella contenente un solo atomo (fig. 5.1), sembra che
5.3. ESTENSIONE AD UN CRISTALLO REALE TRIDIMESIONALE.
53
Figure 5.4: Curve di dispersione per una catena monoaomica: (a) Falsa zona di Brilluouin, con cella doppia;
(b) Zona di Brilluoin normale. (c) Catena biatomica, rappresentazione a zona estesa.
abbiamo raddoppiato il numero dei modi. In realtà non è cosı̀, perché raddoppiando la lunghezza della cella,
abbiamo dimezzato la zona di Brillouin. Ogni ramo comprende quindi N/2 modi. Con una traslazione di π/a,
cioè di un vettore di reticolo reciproco della cella doppia, possiamo trasformare la fig. 5.4 (a) nella fig. 5.4
(b). Si vede allora che il ramo ottico viene ad essere una continuazione di quello acustico. In questo caso la
rappresentazione della fig. 5.4 (a) è sbagliata, perché abbiamo preso una cella doppia di quello che dovrebbe
essere. Se però adesso facciamo sı̀ che le masse siano diverse, possiamo vedere che la fig. 5.4 (b) si modifica
come illustrato nella fig. 5.4 (c). Allora l’effetto di cambiare le masse degli atomi alternativamente è quello di
introdurre dei nuovi confini nella zona di Brillouin del reticolo “monoatomico”, nei punti π/a0 = π/2a: i nuovi
contorni di zona sono a metà della vecchia zona di Brillouin, e delimitano appunto una nuova prima zona di
Brillouin. La frequenza non è più continua attraverso questi confini: compare un intervallo o “gap” di frequenza.
La fig. 5.4 (c) è un secondo modo di rappresentare le soluzioni per il problema delle vibrazioni in una catena
lineare biatomica, in aggiunta a quello già riportato in fig. 5.3. Mentre nella fig. 5.3 il valore di q è limitato
alla prima zona di Brillouin, corrispondente alla cella tipo Wigner-Seitz del reticolo reciproco, e si hanno due
valori di frequenza per ogni valore di q, nella fig. 5.4 (c) abbiamo scelto di far variare q fino al doppio della
zona di Brillouin, cioè fino alla seconda zona di Brillouin, e ad ogni q corrisponde un’unica frequenza. I due
modi di rappresentazione sono evidentemente equivalenti: il primo viene detto “schema a zona ridotta”, e il
secondo “ schema a zona estesa”. Dato che le funzioni soluzioni dell’equazione del moto vengono contraddistinte
con il valore di q cui corrispondono, c’è ambiguità nella assegnazione dei valori di q per il reticolo biatomico,
a seconda che si scelga uno o l’altro schema. Lo schema a zona ridotta ha il vantaggio che il valore di q è, in
valore assoluto, sempre minore di, o uguale a, π/(dimesione della cella unitaria), cioè è limitato sempre alla
prima zona di Brillouin. Lo schema a zona estesa ha il vantaggio che ad un valore di q corrisponde un sol valore
di ω. In effetti si usa uno con l’altro schema a seconda di quale vantaggio è più utile sfruttare per il particolare
problema. Nel caso delle vibrazioni, si adotta pressoché esclusivamente lo schema a zona ridotta, mentre, come
vedremo, per il problema elettronico si usano entrambi gli schemi.
5.3
Estensione ad un cristallo reale tridimesionale.
Finora abbiamo trattato delle vibrazioni nei cristalli per mezzo di modelli semplificati, e cioè: reticolo ad
una sola dimensione; forze solo fra atomi adiacenti. La rimozione di queste due semplificazioni non comporta
54
CHAPTER 5. VIBRAZIONI NEI CRISTALLI. FONONI
particolari problemi, se non che le equazioni divengono più complicate e non risolubili analiticamente, ma solo
per via numerica. Chiamiamo unαi lo spostamento dell’atomo α-esimo nella cella n nella direzione cartesiana i
(i = i, y, z). Le equazioni del moto sono allora:
X mβj
(5.33)
Mα ünαi +
Φnαi umβj = 0
mβj
dove Φmβj
nαi è la costante di forza relativa agli spostamenti unαi e umβj . Per N celle unitarie con p atomi, si
ottengono 3pN equazioni differenziali di questo tipo. Scrivendo la soluzione come:
unαi = √
1
Aαi (q) ei(q·tn −ωt)
Mα
(5.34)
definita solo nei punti reticolari tn , e sostituendo nell’equazione del moto, otteniamo le seguenti equazioni lineari
ed omogenee nelle incognite Aαi :
−ω 2 Aαi (q) + Dβj
(5.35)
αi (q) Aβj (q) = 0
Nell’equazione i termini Dβj
αi (q) sono gli elementi della “matrice dinamica” che corrispondono a:
Dβj
αi (q) =
XX
βj
m
1
p
Φmβj eiq·(tm −tn )
Mα Mβ nαi
(5.36)
Le equazioni lineari ed omogenee ammettono soluzione non banali solo se il seguente determinante dei coefficienti
si annulla:
2
|Dβj
(5.37)
αi (q) − ω 1| = 0
dove 1 è la matrice unità.
La soluzione del problema comporta dunque la risoluzione numerica delle equazioni secolari per diversi valori
del vettore d’onda q. Le curve di dispersione non sono dunque più delle curve analitiche ma l’inviluppo di una
serie di punti discreti. Senza addentrarci nel dettaglio delle soluzioni, che ovviamente dipendono dal particolare
cristallo sotto esame, possiamo facilmente estendere in maniera qualitativa i risultati ottenuti tramite i modelli
semplificati.
Consideriamo un reticolo tridimensionale monoatomico, cioè con un atomo per cella elementare. Ogni
dimensione in più introduce una componente cartesiana in più del vettore spostamento, e quindi dovremmo
risolvere una equazione cubica in ω 2 . Abbiamo dunque tre radici dell’equazione, che nel caso limite di lunghezza
d’onda infinita (q = 0) corrispondono ad onde acustiche propagantesi con velocità diverse lungo una certa
componente del vettore q. I tre modi acustici differiscono essenzialmente perché sono polarizzati in maniera
diversa: se il cristallo è isotropo, uno è polarizzato longitudinalmente, e gli altri due, che hanno velocità uguale,
sono polarizzati trasversalmente, cioè gli atomi si muovono in piani perpendicolari alla direzione di propagazione
dell’onda. Se il cristallo non è isotropo i modi trasversali non saranno più degeneri, tranne che in direzioni di
simmetria particolari. Anche la classificazione in modi longitudinali e trasversali risulta arbitraria, perché il
vettore spostamento non deve essere necessariamente perpendicolare al vettore d’onda o avere la stessa direzione.
Comunque sia il risultato importante è che per un cristallo tridimensionale abbiamo tre modi di tipo acustico,
cioè con velocità costante per lunghezza d’onda sufficientemente grande (a centro zona) e con la frequenza che
tende a zero per q → 0. Allora per ogni vettore q compreso nella prima zona di Brillouin ci saranno tre
valori di ω. Naturalmente la prima zona di Brillouin sarà tridimensionale, non essendo altro che la cella di
Wigner-Seitz del reticolo reciproco. Pertanto la dipendenza funzionale di ciascuna delle tre radici ω(qx , qy , qz )
sarà rappresentata non da una curva ma da una superficie tridimensionale. Nel piano possiamo rappresentare
5.4. CRISTALLI MOLECOLARI
55
delle sezioni di questa superficie mediante curve di livello. In alternativa, si può scegliere di rappresentare la
dispersione di ω lungo una data direzione del vettore q. Questa in effetti è la rappresentazione più comune, le
direzioni prescelte essendo quelle di particolare simmetria del cristallo. Ogni ramo della curva rappresenterà N
modi.
Se adesso passiamo ad un cristallo tridimensionale con due atomi per cella unitaria, avremo una estensione
del caso monodimensionale analoga alla precedente. Cioè, oltre ai tre rami acustici, avremo la comparsa di tre
rami ottici. D’altra parte se abbiamo più di due atomi per cella, diciamo p atomi, è facile intuire che avremo
in tutto 3p rami distinti per la dipendenza di ω da q. Di questi, solo tre potranno avere la frequenza che tende
a zero a centro zona, cioè solo tre saranno di tipo acustico. Difatti per q → 0 i modi acustici corrispondono
a spostamenti di ampiezza confrontabile, e uguale fase per tutti gli atomi, una situazione che si può realizzare
in un unico modo per una data direzione dello spazio. Quindi nello spazio tridimensionale ci saranno solo tre
maniere di realizzare una vibrazione di questo tipo per q → 0, e avremo solo tre rami acustici. Gli altri rami
saranno il tipo ottico, cioè con ω 6= 0 per q = 0. Quindi in generale in un cristallo con p atomi per cella
elementare avremo in ciascuna direzione 3p rami, ciascuno costituito da N punti. Di questi, tre rami saranno
di tipo acustico, e 3p − 3 di tipo ottico. Due esempi di curve di dispersione per cristalli reali sono riportate in
fig. 5.5: a sinistra il cristallo di Potassio, con un atomo per cella, e a destra quello di NaCl.
Figure 5.5: Curve di dispersione per il cristallo di K (a sinistra) e per il cristallo di NaCl (a destra).
5.4
Cristalli molecolari
Adesso consideriamo più in dettaglio cosa succede in un cristallo molecolare. Per analizzare la situazione,
riprendiamo il caso della catena diatomica, con diversi valori delle costanti di forza. Nella soluzione 5.21
che avevamo ricavato, consideriamo il caso F À f . In altre parole, F corrisponde alla costante di forza
intramolecolare, e f rappresenta le deboli forze intermolecolari. In questa situazione le radici dell’equazione
5.21 sono date approssimativamente da:
s µ
¶ s
1
1
F
ω+ = ωint ≈ F
+
=
(5.38)
m M
µ
r
¯
f
q · a ¯¯
¯
(5.39)
¯sin
¯.
m+M
2
La prima soluzione, corrispondente al ramo ottico, non dipende da q, ed è la frequenza vibrazionale di una
molecola isolata, cioè di una molecola in fase gas. Il centro di gravità di ogni molecola rimane fisso all’interno
ω− = ωext = ωret ≈ 2
56
CHAPTER 5. VIBRAZIONI NEI CRISTALLI. FONONI
Figure 5.6: Schema generale per le curve di dispersione in un cristallo molecolare.
della cella unitaria. Il moto corrisponde dunque a una vibrazione intramolecolare, o “interna” alla molecola
(ωint ). La seconda soluzione, corrispondente al ramo acustico, rappresenta il moto di entrambi gli atomi nella
stessa direzione e con la stessa ampiezza, cioè corrisponde al moto traslazionale della molecola come un tutto
rigido. La frequenza è uguale a quella ottenuta per la catena monoatomica con la massa della molecola, m + M ,
al posto della massa dell’atomo. Si parla allora, in contrapposizione alla vibrazione interna, di vibrazione
“esterna” (ωext ) o reticolare (ωret ). Le soluzioni che abbiamo illustrato sono valide nel caso limite F À f :
la separazione tra moti interni ed esterni (o di reticolo) è una separazione approssimata, i due tipi di moto si
influenzeranno a vicenda. Cosı̀, ωint presenterà una qualche dipendenza, seppure piccola, da q, e ωret conterrà
anche oscillazioni delle distanze intramolecolari. L’approssimazione della molecola rigida, con la separazione tra
modi interni ed esterni, è tuttavia un utile punto di partenza per l’analisi dei modi vibrazionali di un cristallo
molecolare.
Passando al caso tridimensionale, supponiamo di avere un cristallo contenente σ molecole per cella elementare, ciascuna con t atomi. Quindi per ogni valore di q avremo 3σt modi normali, cioè 3σt rami. Di questi,
6σ corrisponderanno a modi esterni, cioè a moti delle molecole rigide come un tutto: per ogni molecola dovremo
allora considerare tre possibili traslazioni e tre rotazioni attorno agli assi principali di inerzia. Abbiamo visto
prima che i modi acustici sono modi reticolari. Dato che i modi acustici sono comunque 3 per un cristallo
tridimensionale, dei 6σ modi reticolari, 3 saranno acustici, corrispondenti a moti traslatori delle molecole, e
6σ − 3 saranno di tipo ottico. I rimanenti 3σt − 6σ = 3σ(t − 2) modi saranno modi interni (o intramolecolari),
tutti il tipo ottico. Uno schema delle curve di disperisone risultanti è riportato in fig. 5.6.
5.5. PASSAGGIO ALLA QUANTO-MECCANICA. FONONI.
5.5
57
Passaggio alla quanto-meccanica. Fononi.
Finora abbiamo trattato problema dal punto di vista classico. E’ da notare che anche con il modello classico
abbiamo una sorta di “quantizzazione”, cioè a dire dei valori proibiti di frequenza. Un primo tipo di quantizzazione potrebbe essere pensato come dovuto al fatto che q assume solo valori discreti. In tre dimensioni, le
condizioni cicliche di Born-von Karman difatti sono:
exp i(q · tn ) = exp i[(1 + N )q · tn ],
(5.40)
con tn un vettore del reticolo reciproco, e N = N1 N2 N3 il numero di celle. Allora i possibili 3N valori di q
sono dati da:
s2 ∗
s3 ∗
s1 ∗
a +
b +
c
(5.41)
q=
N1
N2
N3
con un a∗ , b∗ , e c∗ vettori della cella unitaria del reticolo reciproco, e −Ni /2 < si ≤ Ni /2 (i = 1, 2, 3).
D’altra parte, N1 , N2 ed N3 , sono numeri molto grandi, dell’ordine di 1020 , e quindi la quantizzazione su q
praticamente non esiste. Un secondo tipo di “quantizzazione” è quello dovuto ai gap tra i rami delle curve
di dispersione. Onde di frequenza corrispondente al gap non possono propagarsi all’interno del cristallo, sono
cioè frequenze proibite per le vibrazioni. Si parla comunque di gap: il termine quantizzazione è abbastanza
improprio e potrebbe generare confusione.
Abbiamo dunque trovato i modi normali di vibrazione di un cristallo. Il passaggio alla quanto meccanica
è a questo punto immediato. Difatti abbiamo usato l’approssimazione armonica e separato il moto in tanti
oscillatori armonici indipendenti. Dunque i livelli vibrazionali corrispondenti ad un certo vettore d’onda q
avranno la forma:
µ
¶
1
²n,q = n +
~ωq
(5.42)
2
con ωq la frequenza classica risultante dalla risoluzione delle equazioni del moto che abbiamo appena visto.
L’energia totale sarà la somma su tutti i q delle energie ²n,q e la funzione d’onda sarà il prodotto di 3pN polinomi
di Hermite (per un cristallo tridimensionale con p atomi per cella e N celle). Poiché l’equazione rappresenta un
set di livelli uniformemente spaziati, per ciascun modo normale di frequenza ωq possiamo considerare lo stato
²n,q come costruito aggiungendo allo stato fondamentale n “quanti di eccitazione” o “eccitazioni elementari”,
ciascuna di energia ~ωq . Da questo punto di vista conviene ridefinire lo zero di energia, prendendolo uguale alla
energia dello stato fondamentale:
1X
Egs =
~ωq = 0
(5.43)
2 q
Allora gli operatori creazione e distruzione bosonici corripondenti ad un dato modo normale Qq , cioè a+
q e aq ,
con
[aq , a+
(5.44)
q 0 ] = δq,q 0 ,
aggiungeranno o toglieranno quanti di eccitazione. Lo stato fondamentale è detto allora “ stato vuoto”, ed i
quanti di eccitazione vengono denominati “fononi”.
Questo modo di considerare le cose è analogo a quello che si usa nel caso della radiazione elettromagnetica di
frequenza ν: noi diciamo che lo stato di energia εm della radiazione elettromagnetica corrisponde alla presenza
di m fotoni ciascuno di energia hν. Nel caso delle vibrazioni parliamo invece di fononi energia ~ωq come quanti
di eccitazione vibrazionale. La dinamica del fonone, visto come una particella, può essere espressa in termini di
massa, momento, e energia. A differenza del fotone, tuttavia, il fonone non può esistere al di fuori del cristallo, e
le sue proprietà dipendono dalle forze che tengono uniti gli atomi a formare il solido. Cosı̀ le proprietà del fonone
58
CHAPTER 5. VIBRAZIONI NEI CRISTALLI. FONONI
sono proprietà collettive: per esempio il momento del fonone non è un momento fisico, dato che le coordinate
del fonone sono coordinate di spostamento relativo degli atomi, e il cristallo come un tutto non ha momento
lineare. Per questi motivi il fonone, come altre particelle che incontreremo più avanti, viene detto essere una
“quasi-particella”, per distinguerlo dalle particelle ordinarie.
Da che cosa è dato il momento del fonone ? Consideriamo un singolo fonone di frequenza ωq , la cui velocità
è data da c = ωq /q, cioè ωq = q · c. In meccanica classica il momento p è derivabile dalla funzione Lagrangiana
classica L(r, ṙ) = L(r, c), differenza tra l’energia cinetica T e l’energia potenziale V , L = T − V , tramite la
derivata:
∂L
p=
(5.45)
∂c
Nel nostro caso la funzione Lagrangiana relativa ad un fonone può essere scritta come L = T − V = H − 2V .
L’energia totale corrispondente ad H è data da ²q = ~ωq , e dato che il potenziale V non dipende dalle velocità
in un sistema conservativo, ∂V /∂c = 0, il momento del fonone è dato da:
p=
∂H
~ ∂q · c
=
= ~q
∂c
∂c
(5.46)
che non è poi che un altro modo di esprimere la relazione di De Broglie |p|λ = h. Il momento del fonone è
dunque direttamente proporzionale al vettore d’onda, e q assume dunque il significato di momento.
L’utilità del concetto di fonone è collegata al fatto che possiamo considerare l’interazione delle vibrazioni del
cristallo con agenti esterni, come per esempio la radiazione elettromagnetica, come una collisione tra particelle,
per esempio un urto fonone-fotone. Questo è appunto l’argomento del prossimo capitolo.
Chapter 6
Scattering fononico
Vediamo ora come il concetto di fonone si dimostri utile per descrivere l’interazione delle vibrazioni con agenti
esterni, quali fotoni o altre particelle. Come vedremo tra un attimo, è possibile descrivere questa interazione in
termini di urti (scattering), ed in tal modo possiamo ottenere una descrizione semplice ed unificante di vari tipi
di spettroscopia utilizzati per ottenere informazioni sulla curva ω(q), cioè sulle curve di dispersione fononiche.
Se abbiamo due sistemi di particelle interagenti, la probabilità di transizione da uno stato all’altro è data
da:
Ps←i ∝ | < ψs |HI0 |ψi > |2
HI0
(6.1)
HI0
essendo l’ampiezza dell’hamiltoniano di interazione dipendente dal tempo, HI =
cos ωt. Questa espressione richiama la ben nota regola d’oro di Fermi, che dà la probabilità di transizione per un sistema molecolare
interagente con radiazione elettromagnetica. La regola d’oro di Fermi è ricavata da un trattamento semiclassico,
in cui cioè il sistema molecolare è trattato in maniera quanto-meccanica, e la radiazione in maniera classica.
Un trattamento quanto-meccanico completo porta alla stessa espressione, ma naturalmente in questo caso la ψ
descrive entrambi i sistemi interagenti, per esempio appunto il fonone e il fotone. In assenza di interazione lo
stato del sistema è dato dal prodotto degli stati:
|ψi >= |χq > |φk >
(6.2)
Dove abbiamo riservato la q per indicare il vettore d’onda del fonone descritto da χ, e k il vettore d’onda
del fotone descritto da φ. Difatti sia |χq > che |φk > devono soddisfare il teorema di Bloch, il fotone dovendo
comunque propagarsi all’interno del cristallo. Avremo dunque:
|χq >
∝ exp(iq · r)
(6.3)
|φk >
∝ exp(ik · r)
(6.4)
L’hamiltoniano di interazione sarà anch’esso una funzione periodica con periodicità del reticolo, cioè:
HI0 (r + tn ) = HI0 (r)
E naturalmente possiamo espandere tale funzione in serie di Fourier:
59
(6.5)
60
CHAPTER 6. SCATTERING FONONICO
HI0 (r) =
X
AG exp(iG · r)
(6.6)
G
G essendo un vettore del reticolo reciproco, G · tn = 2π× un intero (nota: in altri capitoli abbiamo usato il
simbolo gh invece di G). Allora la probabilità di transizione scritta sopra sarà proporzionale al quadrato di:
"
Z
exp(−iqs · r) exp(−iks · r)
X
#
AG exp(iG · r) exp(iqi · r) exp(iki · r) dr
G
=
X
AG
(6.7)
Z
exp i [(−qs − ks + G + qi + ki )r] dr
G
E dal momento che le funzioni esponenziali sono ortogonali tra di loro, l’integrale precedente si annulla a meno
che qs + ks − G − qi − ki = 0, e quindi il solo termine G-esimo sopravvive nella sommatoria. Abbiamo allora
che la probabilità di transizione è:
(
AG se qs + ks − G − qi − ki = 0
(6.8)
0
altrimenti
Ora sappiamo che a temperatura ambiente le vibrazioni in un cristallo sono per lo più tutte nello stato fondamentale. Nel linguaggio dei fononi, ciò corrisponde allo stato vuoto, senza fononi. Pertanto senza perdere in
generalità, possiamo assumere qi = 0, e la regola di selezione è
qs = ki − ks + G
(6.9)
Supponiamo dapprima che G = 0. Moltiplicando per ~ abbiamo ~qs = ~(ki − ks ), cioé ps = Pi − Ps ,
che non è altro che la legge di conservazione del momento della quantità di moto. Quindi nel trovare le regole
di selezione per la transizione, siamo stati ricondotti all’enunciazione della legge di conservazione del momento
della quantità di moto nell’urto tra particelle. A questo risultato si poteva arrivare direttamente considerando
l’interazione come un urto tra particelle. Cominciamo dunque a vedere l’utilità del concetto di fonone, anche
se nella derivazione siamo partiti della regola d’oro di Fermi e abbiamo sostanzialmente sfruttato le proprietà
di simmetria traslazionale del cristallo.
I tipi di processi in cui G = 0 vengono detti processi “normali” o N. Nel caso più generale, G sarà diverso
da zero, e la legge di conservazione del momento della quantità di moto non è apparentemente più rispettata
perchè abbiamo: ps = Pi − Ps + ~G. Questo tipo di processo viene detto processo “Umklapp” (folding) o
U. La legge di conservazione della quantità di moto è solo apparentemente violata nel processo U: la particella
incidente può acquistare o perdere l’impulso ~G in aggiunta all’impulso del fonone. L’impulso ~G è ceduto
o acquistato dal cristallo come un tutto. Nel costruire gli stati vibrazionali del cristallo, non abbiamo tenuto
conto del moto il baricentro del cristallo stesso, in relazione al quale vengono espresse le vibrazioni stesse. Si
può dimostrare che la legge fondamentale della conservazione della quantità di moto è rispettata se si include il
moto associato alla traslazione del cristallo come in tutto.
Possiamo allora considerare l’interazione del moto vibrazionale con agenti esterni come un urto del fonone
con altre particelle. Ora nella meccanica degli urti si distinguono due tipi di possibilità: l’urto elastico e l’urto
anelastico. Nel primo caso, il momento della particelle incidente è uguale in valore assoluto a quello della
particella scatterata: |Pi | = |Ps |. Quindi nessun fonone è creato o distrutto in questo processo, l’energia della
particella incidente è uguale a quella della particella scatterata:
61
Pi2
P2
= s
(6.10)
2m
2m
E l’unico risultato dell’urto è il cambiamento in direzione della particella incidente. Nei processi U ci sarà
trasferimento di momento al/dal cristallo.
L’urto anelastico è invece quello in cui un fonone è creato o distrutto, in cui cioè oltre al momento anche
l’energia della particella incidente varia:
Pi2
P2
= s + ~ωq
2m
2m
(6.11)
Consideriamo allora l’interazione tra il fotone ed il fonone. Per il fotone all’interno del cristallo la relazione
tra lunghezza d’onda e frequenza è ovviamente λν = c dove c è la velocità della luce nel cristallo ed è una
costante. L’energia del fotone è data da ²k = ~ωk La frequenza del fonone, ωq , legata al vettore d’onda
dall’appropriata relazione di dispersione, è dell’ordine di grandezza di 1012 - 1013 s−1 , cioè da 100 a 4000
cm− 1. Se inviamo nel cristallo un fotone alla stessa frequenza, in seguito all’urto il fotone è assorbito e un
fonone è creato. I processi il tipo U possono in questo caso essere trascurati. Abbiamo dunque ki = qs , ed in
termini della conservazione dell’energia abbiamo ~ωk = ~ωq . L’urto è dunque completamente anelastico, con
la massima variazione dell’energia della particella incidente. Se conosciamo ωk possiamo dunque determinare
ωq . ωk corrisponde a radiazione elettromagnetica di lunghezza d’onda da 10 a 300 × 10−4 cm, cioè nella zona
dell’infrarosso. Il vettore d’onda della radiazione incidente è dunque della dimensione 2×102 - 5×103 cm−1 . Il
massimo valore che può assumere il vettore d’onda fononico, cioè π/a, dove a ha la dimensione tipica di una
cella cristallina, è di 3×108 cm−1 . Pertanto il valore del vettore d’onda del fonone creato, uguale a quello del
fotone incidente, è praticamente zero rispetto ai normali valori di q.
Abbiamo dunque trovato la regola di selezione per l’assorbimento della radiazione, ovvero qs ∼ 0. Pertanto
in questo caso è facile determinare l’energia con accuratezza, mentre i vettori d’onda sono troppo piccoli perché
possano essere determinati. Quindi possiamo avere solo un pezzo d’informazione dei due potenziali: in sostanza
non possiamo allontanarci dalla zona intorno a q = 0. Dal che si vede che il ramo acustico non dà luogo ad
assorbimento dell’infrarosso, dato che ωq = 0. Pertanto il numero massimo di vibrazioni che possono essere
attive in infrarosso è uguale al numero dei rami ottici, cioè per un cristallo costituito da m atomi per cella
elementare, da m - 3 modi.
La regola di selezione q ∼ 0 vuol dire che il fonone creato appartiene alla rappresentazione totalsimmetrica
del gruppo di traslazione, cioè, la forma geometrica della vibrazione non cambia nell’operazione di traslazione
stessa. Ciò significa che lo spostamento di un certo atomo è lo stesso in ogni cella unitaria. Per questo
motivo, per classificare le vibrazioni infrarosso attive e trovare le ulteriori regole di selezione possiamo servirci
del gruppo fattore cioè del gruppo di simmetria della cella unitaria stessa. Ad ogni modo, la spettroscopia
infrarossa ci fornisce informazioni molto limitate circa le frequenze di vibrazione nei cristalli, permettendo al
più di determinare la frequenza dei modi ottici a q = 0. La forma della curva di dispersione deve essere
determinata con altri metodi sperimentali.
Aumentiamo adesso la frequenza della radiazione incidente, in modo da portarci fuori della zona di assorbimento fononico, ma restando al di sotto della zona di assorbimento da parte degli elettroni nel cristallo.
Portiamoci cioè nella zona della radiazione del vicino infrarosso o del visibile, cioè da 1000 a 500 nm circa.
In queste condizioni non si ha quindi assorbimento, ma piuttosto i fenomeni di secondo ordine come l’effetto
Raman. Anche in questo caso è irrilevante la presenza di processi di tipo U, per cui ki = ks + qs . Abbiamo, al
62
CHAPTER 6. SCATTERING FONONICO
solito, la possibilità di scattering sia elastico che anelastico. Radiazione incidente visibile, di lunghezza d’onda
di 500 nm, ha un vettore d’onda all’interno del cristallo di circa 2×105 cm−1 . Se, come spesso succede nella
disposizione sperimentale, ki e ks fanno un angolo di 90 gradi, la conservazione del vettore d’onda richiede che
il fonone creato o distrutto sia di circa 3×105 cm−1 , ancora molto piccolo rispetto al valore di q al limite della
zona di Brillouin. Pertanto i fononi implicati sia nell’urto elastico che in quello anelastico hanno lunghezza
d’onda molto grandi rispetto alle dimensioni del reticolo, ed hanno praticamente la stessa frequenza dei fononi
a lunghezza d’onda infinita. Si ha in altre parole anche in questo caso la regola di selezione q ∼ 0. Di nuovo non
sarà possibile misurare q, perché è ancora molto piccolo anche se più grande che nel caso infrarosso. Pertanto
la presenza dei processi U è irrelevante, come anticipato sopra, e potremo avere informazioni solo sulle energie.
Nell’urto elastico - che viene detto effetto Rayleigh - il fotone conserva la propria energia, e quindi questo dato
non è informativo dal nostro punto di vista. Nell’urto anelastico - che corrisponde all’effetto Raman - abbiamo:
~[ω(ki ) − ω(ks )] = ~ω(q)
(6.12)
E quindi misurando la differenza di frequenza tra radiazione incidente e radiazione scatterata si determina
la frequenza del fonone. L’effetto Rayleigh e l’effetto Raman avvengono naturalmente contemporaneamente
quando inviamo luce visibile sul cristallo, con l’effetto Rayleigh largamente predominante. I due effetti danno
però luogo a radiazione di frequenza diversa, e possono essere discriminati mediante un monocromatore, magari
doppio.
E’ da tenere presente, tuttavia, che la zona di q attorno a zero esplorabile con il Raman è un poco più
ampia di quella relativa all’infrarosso: si passa da un valore 100000 volte più piccolo rispetto a q al confine
di zona, a un valore di solo 1000 volte più piccolo. Questo non ha praticamente effetto per le transizioni del
ramo ottico, data la scarsa dipendenza della frequenza da q attorno a q = 0 per questi modi. Per il ramo
acustico invece la dipendenza di ω da q attorno a q = 0 è molto grande, ed il valore di q per l’effetto Raman
è sufficientemente grande perché la frequenza abbia valori diversi da zero, e cioè da 0 a circa 5 cm−1 . Inoltre
il valore della frequenza osservata dipenderà dall’angolo tra ki e ks . Data la piccolissima differenza tra la
frequenza delle radiazione incidente e la frequenza delle radiazione scatterata, occorrerà fare uso di tecniche ad
alta risoluzione, per poter discriminare la radiazione scatterata con creazione o distruzione di un fonone acustico
dalla radiazione dovuta all’effetto Rayleigh. Per questi motivi l’effetto Raman relativo ai rami acustici viene più
spesso denominato effetto Brillouin. Da notare che questi stati fononici hanno bassa energia, e gli stati eccitati
sono apprezzabilmente popolati tranne che a temperature al disotto di circa 20 K.
Per ciò che riguarda i rami ottici dunque sia infrarosso che Raman forniscono lo stesso tipo di informazione,
e cioè la frequenza di tali modi a q = 0. Naturalmente la regola di selezione q ∼ 0 è ricavata sulla base
della simmetria translazionale del reticolo. Per ottenere le regole di selezione valide caso per caso, bisognerà
considerare l’intera simmetria del cristallo. Dato però che vale la q ∼ 0, potremo trovare le ulteriori regole di
selezione limitandoci a considerare il gruppo fattore, come abbiamo già detto in precedenza, e come vedremo
più in dettaglio quando parleremo delle proprietà ottiche dei cristalli.
Sempre restando nel campo dell’interazione fotone-fonone, possiamo pensare di aumentare ancora la frequenza delle radiazione incidente. Se passiamo dalla zona visibile alla zona dell’ultravioletto o comunque se
il fotone è assorbito da transizioni tipo elettronico, naturalmente non possiamo avere informazioni sulla parte
fononica dello stato fondamentale. Vediamo invece cosa succede se aumentiamo ulteriormente la frequenza fino
a portarci nella zona dei raggi X cioè circa 1018 s−1 . Possiamo avere, rispetto ai fononi, sia lo scattering elastico
che quello anelastico, con creazione o distruzione di fononi. Tuttavia l’energia di un fotone X è di circa 104 eV,
mentre l’energia di un fonone è di circa 10−1 - 10−3 eV. Nell’urto anelastico si tratterebbe quindi di determinare
differenze piccolissime energia, in genere inferiore alla risoluzione ottenibile con gli ordinari strumenti a raggi
X. Pertanto una misura diretta della differenza di energia nel caso dello scattering anelastico non può essere
63
ottenuta. Un’informazione indiretta e parziale è ottenibile, ma la tecnica è piuttosto imprecisa e non trova per
il momento largo uso.
Il vettore d’onda dei raggi X è invece di circa 2×108 cm−1 , quindi confrontabile con il vettore d’onda fononico.
Siamo quindi in una situazione complementare rispetto all’infrarosso e al Raman: è possibile determinare il
vettore d’onda, ma non l’energia. Allora sostanzialmente non possiamo apprezzare la differenza tra un urto
elastico e un urto anelastico. Consideriamo quindi l’urto elastico. La relazione di conservazione del momento
in questo caso è:
ks = ki + G
(6.13)
È importante considerare il processo U, dato che possiamo determinare i vettori d’onda. Per lo scattering
elastico |ki | = |ks | = |k|, e allora, detto 2θ l’angolo tra ki e ks , abbiamo:
|G| = 2|k| sin θ
(6.14)
D’altra parte sappiamo che ogni vettore del reticolo reciproco è perpendicolare ad un insieme di piani
reticolari del reticolo diretto, la cui distanza è data da d = 2πn/|G|, con n un intero. Sostinuendo nella (6.14),
tenendo conto che |k| = 2π/λ, otteniamo:
nλ = 2d sin θ
(6.15)
che è nota come la legge di riflessione Bragg, originariamente ricavata sulla base della relazione tra le fasi di
fasci di raggi X “riflessi” da piani reticolari successivi.
Quindi sostanzialmente se si fa variare l’angolo θ (cioè facendo ruotare il cristallo rispetto alla sorgente ed
al rivelatore), l’immagine che si ottiene tramite la diffrazione dei raggi X è un’immagine del reticolo reciproco.
Uno può quindi pensare che da questo sia possibile determinare il reticolo diretto facendo la trasformata inversa.
In realtà non è cosı̀, perché quello che si misura non è l’ampiezza delle radiazione ma l’intensità, cioè il modulo
quadro:
¯
¯2
Z
¯X
¯
¯
2¯
I ∝ |A0 | ¯
ρG exp[i(G − ks + ki )]dr¯
(6.16)
¯
¯
G
dove ρG è la densità dei punti reticolari. Quindi non possiamo fare la trasformata inversa, perché manca
informazione sulla fase. Una procedura è allora di calcolare il pattern di diffrazione per una data struttura, e
poi fare un fitting non lineare sulla struttura sperimentale (con il cosiddetto processo di raffinamento).
Riassumendo, l’interazione dei fotoni con il cristallo fornisce informazioni diverse a seconda della zona
spettrale cui questi appartengono. Fotoni molto energetici hanno lunghezza d’onda confrontabile con quella
fononica ma a causa della loro energia non possono fornire informazioni circa l’energia fononica: essi sono utili
solo per dare la posizione di equilibrio degli atomi. Viceversa, fotoni meno energetici (visibile, vicino infrarosso
e infrarosso) forniscono informazioni sull’energia dei fononi, ma solo di quelli a grande lunghezza d’onda cioè
a q ∼ 0, mentre non danno informazioni strutturali, né permettono di ricavare sperimentalmente le curve di
dispersione.
Per poter ottenere apprezzabili cambiamenti relativi di frequenza nello scattering anelastico, e nello stesso
tempo poter esaminare valori di q nell’intera zona di Brillouin, bisogna avere particelle di frequenza confrontabile
a quella delle vibrazioni del reticolo, (∼ 1013 s−1 ) e di lunghezza d’onda confrontabile alla distanza interatomica
(qualche Å). L’accoppiamento tra queste due caratteristiche può essere ottenuto mediante particelle “ordinarie”
cioè, a differenza del fotone, con massa diversa da zero. Per queste particelle l’energia corrisponde all’energia
cinetica, T = p2 /2m = hν. Il momento può essere variato accelerando o rallentando la particella. Il modulo del
momento p sarà poi legato alla lunghezza d’onda dalla relazione di De Broglie pλ = h. Da queste due relazioni
si ricava:
h
(6.17)
νλ2 =
2m
64
CHAPTER 6. SCATTERING FONONICO
Questa equazione esprime la relazione tra ν e λ (ovvero tra ω e k) al posto della nota νλ = c valida per
il fotone. Per avere un valore di ν e λ adatti, cioè confrontabili con quelli dei fononi, la particella deve avere
una massa di circa 2× 10−27 kg, cioè la massa di un protone o di un neutrone. I protoni sono facilmente
ottenibili, ma il loro uso assai limitato: in vista del gran numero di elettroni presenti nel solido il protone viene
immediatamente trasformato in atomo e “catturato” all’interno del cristallo. Si usano pertanto i neutroni con
energia nel campo 1-100 eV, cioè neutroni lenti o “termici”, che hanno frequenza dell’ordine di 1013 − 1016 s−1 ,
e lunghezza d’onda nel campo di 1-10 Å. Naturalmente anche nel caso della diffrazione (o scattering) neutronica
possiamo avere sia lo scattering elastico che quello anelastico, entrambi regolati dai principi che abbiamo già
visto.
Lo scattering elastico dà lo stesso tipo di informazioni della scattering elastico dei raggi X, cioè a dire la
posizione degli atomi all’interno della cella. La relazione che si ottiene è analoga alla legge di Bragg. Da questo
punto di vista, lo scattering neutronico elastico è complementare ai raggi X: difatti nell’urto elastico questi
ultimi sono scatterati principalmente dagli elettroni, e quindi vengono scatterati con tanta maggiore efficienza
quanti più elettroni ci sono, cioè quanto più grande è il numero atomico. Viceversa i neutroni sono scatterati
principalmente dai nuclei e l’efficienza della scattering in questo caso non presenta una variazione sistematica
col numero atomico. Si verifica tuttavia che i neutroni sono particolarmente adatti per rivelare la posizione degli
elementi leggeri ed in particolare dell’idrogeno. Una limitazione dello scattering neutronico è quella imposta
dalla bassa intensità del fascio, cioè dalla difficoltà di ottenere segnali facilmente rivelabili del fascio scatterato.
Per ovviare a questa difficoltà si è costretti a diminuire il grado di monocromaticità fascio stesso, cioé a dire
si deve essere meno severi nel selezionare i neutroni in un certo intervallo di velocità, il che crea problemi di
collimazione e di risoluzione. Pertanto si richiedono dei cristalli piuttosto grandi. In definitiva a parte gli atomi
leggeri come l’idrogeno i raggi X sono superiori ai neutroni per ciò che riguarda la precisione nella determinazione
della struttura.
Per ciò che riguarda lo scattering anelastico otteniamo lo stesso tipo di informazione della spettroscopia
infrarossa e Raman, solo che il campo di valori di q esplorabile non è limitato alla zona intorno q ∼ 0, ma
si estende sopra l’intera zona di Brillouin. Un’altra caratteristica che distingue lo scattering a neutroni dalla
spettroscopia infrarossa e Raman è che non ci sono in questo caso regole selezione addizionali in aggiunta alle:
~ki
=
~ks + ~q − ~G
(6.18)
~2 ki2
2Mn
=
~2 ks2
+ ~ω
2Mn
(6.19)
mentre nel caso infrarosso e Raman avevamo in aggiunta le regole di selezione del gruppo fattore (simmetria della
cella unitaria), essenzialmente legate alle proprietà di simmetria degli operatori relativi all’interazione fononefotone, il momento di dipolo elettrico e la polarizzabilità. Il fatto che nella diffrazione neutronica non ci siano
regole di selezione di questo tipo è da una parte un vantaggio, perché tutti i modi normali sono potenzialmente
rivelabili, dall’altra è uno svantaggio perché se la cella contiene molti atomi, gli spettri di diffrazione neutronica
diventano molto difficili da interpretare. Difatti se abbiamo molte curve di dispersione addossate l’una all’altra
può risultare difficile distinguere a quale ramo appartiene una data frequenza, data la vicinaza dei valori di q,
ovvero, per un dato valore di q, può essere difficile risolvere frequenze prossime tra loro.
La fig. 6.1 dà un quadro riassuntivo della discussione testé fatta sullo scattering fononico e sulle informazioni
che si possono ottenere.
65
Figure 6.1: Confronto tra i vari metodi di indagine per i fononi e la struttura cristallina.
66
CHAPTER 6. SCATTERING FONONICO
Appendix A
Onde. Serie e Trasformate di Fourier
In questa appendice considereremo brevemente la descrizione fisica di moti ondulatori e l’analisi di Fourier di
moti ondulatori o di moti comunque periodici. Questo ci serve per rivedere brevemente alcuni concetti che
trovano larga applicazione nella descrizione della fisica dei solidi cristallini.
A.1
Onde
Consideriamo dapprima il moto ondulatorio in un piano, per esempio una corda che viene fatta vibrare. Possiamo
visualizzare il moto rappresentando lo spostamento dalla posizione di equilibrio o in funzione della coordinata
x, o in funzione del tempo t.
L’equazione del moto della corda è della forma seguente, con z = z(x, t) che rappresenta lo spostamento
dalla posizione di riposo:
∂2z
1 ∂2z
=
2
∂x
c ∂t2
(A.1)
Se scriviamo c2 = (∂x2 /∂ 2 z)(∂ 2 z/∂t2 ) = (∂x/∂t)2 , cioè c = ∂x/∂t, è facile rendersi conto che c è una quantità
che ha le dimensioni di una velocità lungo l’asse x. La velocità c può essere costante, oppure dipendere dal
tempo t o da x o da entrambi.
Le soluzioni dell’equazione precedente hanno la forma seguente, a patto che la velocità c non dipenda dal
tempo:
z(x, t) = f (x + ct)
(A.2)
z(x, t) = g(x − ct)
(A.3)
oppure
dove f e g sono due funzioni qualunque di x e t. Il significato fisico di queste soluzioni è facilmente visualizzabile.
Al tempo t = 0, l’onda avrà una certa “forma” o profilo, dato da z(0) = f (x), e sia per esempio quello riportato in
fig A.1. In ogni istante successivo l’onda presenterà lo stesso profilo, solo che questo sarà spostato in direzione
negativa (se c è positiva) di una quantità ct. Quindi la z = f (x + ct) corrisponde ad un’onda di profilo
costante moventesi con velocità c nella direzione x negativa. Parimenti, la z = g(x − ct) rappresenta un’onda
67
68
APPENDIX A. ONDE. SERIE E TRASFORMATE DI FOURIER
z(x,t)
λ or T
x or t
Figure A.1: Diagramma della funzione z(x,t)
di forma costante che si muove con la velocità c nella direzione x positiva. Anche la combinazione lineare:
z(x, t) = f (x + c1 t) + g(x − c2 t) è naturalmente una soluzione dell’equazione d’onda. Se c1 = c2 e f = g,
abbiamo quella che si chiama un’onda stazionaria, un’onda cioè il cui profilo non si muove nel tempo. In tal
caso ci sono dei punti in cui z = 0, che rimangono fissi nel tempo. Come sapete questi punti sono chiamati nodi.
La condizione di onda stazionaria o di onda mobile è determinata dalle condizioni al contorno del problema.
Nel caso che z(x) sia normale al piano, come abbiamo mostrato in figura, l’onda si dice trasversale; nel caso che
coincida con x, l’onda si dice longitudinale. Questo non porta comunque differenze nel trattamento matematico.
Finora abbiamo visto il tipo di soluzione più generale dell’equazione d’onda. Noi siamo particolarmente
interessati alle soluzioni cosiddette armoniche, cioè il cui profilo è una curva sinusoidale, seno o coseno:
z = A cos m(x − ct)
(A.4)
z = A sin m(x − ct)
(A.5)
oppure
Il valore massimo dell’elongazione, A, è detta ampiezza dell’onda. Il profilo dell’onda si ripete a distanze
regolari, 2π/m. Questa distanza, cioè la distanza tra i due punti più vicini con la stessa ampiezza, è la lunghezza
d’onda, λ = 2π/m. Inoltre il tempo impiegato perché un’onda completa passi per un certo punto è detto il
periodo T dell’onda. Pertanto (2π/λ)(x − ct) deve passare attraverso un ciclo completo di valori quando t è
aumentato di T . Quindi (2πcT )/λ = 2π, e T = λ/c. Definendo ν, la frequenza, come inverso del periodo,
abbiamo la ben nota:
νλ = c
(A.6)
Se introduciamo poi la frequenza angolare ω = 2πν, e il vettore d’onda k, cioè un vettore che ha la direzione
e il verso di propagazione dell’onda stessa e modulo |k| = 2π/λ, l’equazione d’onda diviene:
z = A cos(|k|x − ωt)
(A.7)
A.2. SERIE DI FOURIER
69
e la velocità c = ω/|k|. Usando le consuete formule di Eulero e±iy = cos y ± i sin y, possiamo fare una combinazione lineare moltiplicando la seconda equazione per l’unità immaginaria, ottenendo un altro modo di scrivere
un’onda armonica:
z = A exp i(|k|x − ωt)
(A.8)
Quest’onda viaggia in direzione delle x positive. Per un’onda che viaggia in direzione negativa possiamo
fare una combinazione lineare moltiplicando la funzione seno per −i, ottenendo: z = exp i(−|k|x − ωt). Le due
equazioni differiscono nel segno posto davanti al modulo del vettore d’onda. Se ricordiamo che k è un vettore
che ha il verso nella direzione propagazione dell’onda possiamo fare uso della notazione vettoriale e scrivere
un’unica formula generale:
z = A exp i(kx − ωt)
(A.9)
Cosicché se k è concorde con x, l’onda viaggia nella direzione delle x positive, e se è discorde l’onda viaggia in
direzione opposta.
Quanto detto può essere generalizzato in tre dimensioni cioè per il caso di un’onda che si propaga nello
spazio ordinario. In questo caso si definisce come fronte d’onda il piano che un certo istante è individuato da
tutti punti che hanno la stessa ampiezza. Se il fronte d’onda è perpendicolare alla direzione di propagazione,
che è individuata dal vettore k, l’onda si dice piana. Nel caso tridimensionale la funzione d’onda può essere
scritta come:
φ(r, t) = A exp i(kr − ωt)
(A.10)
dove r è un vettore perpendicolare al fronte d’onda.
A.2
Serie di Fourier
Se abbiamo una funzione periodica può essere conveniente espanderla in serie di seni e di coseni secondo
l’espansione detta di Fourier:
∞
f (x) =
a0 X
+
(an cos nx + bn sin nx)
2
n=1
(A.11)
Le condizioni affinchè quest’equazione sia valida è che f (x) abbia al più un numero finito di discontinuità,
di massimi e di minimi. In genere queste condizioni sono soddisfatte per le funzioni che descrivono fenomeni
fisici. Se esprimiamo il coseno e il seno in forma esponenziale tramite le formule di Eulero, possiamo riscrivere
la serie in termini degli esponenziali:
f (x) =
+∞
X
cn einx
(A.12)
n=−∞
con: cn = (1/2)(an − ibn ), c−n = (1/2)(an + ibn ) e c0 = (1/2)a0 . Possiamo dunque usare indifferentemente le
serie di Fourier in seno e coseno o la serie di Fourier in termini esponenziali. Una proprietà importante delle
funzioni termini delle serie è che esse costituiscono un set completo (sono difatti autofunzioni di un’equazione
differenziale). In quanto tali possono essere usate per rappresentare qualunque funzione, ed inoltre sono ortogonali. Ad esempio nel caso delle funzioni esponenziali (essendo le funzioni esponenziali delle funzioni periodiche,
l’integrale va da 0 a 2π o da −π a +π, invece che da −∞ a +∞):
70
APPENDIX A. ONDE. SERIE E TRASFORMATE DI FOURIER
Z
2π
(eimx )∗ einx dx = 2πδmn
(A.13)
0
Quindi possiamo usare le funzioni delle serie come abbiamo fatto con le autofunzioni di un hamiltoniano.
Per esempio per ottenere i coefficienti cn basta moltiplicare la serie per exp(imx)∗ e integrare. Tutti termini
con m 6= n si annullano per cui abbiamo:
1
cn =
π
Z
2π
f (x0 ) exp(−inx0 ) dx0
(A.14)
0
Ovvero per la serie seno e coseno:
an
bn
1
π
=
1
π
=
Z
2π
f (x0 ) cos(nx0 ) dx0
0
Z
2π
f (x0 ) sin(nx0 ) dx0
(A.15)
0
dove abbiamo messo in segno ’ per poter distinguere la x su cui si fa l’integrale dalla x della funzione espansa
in serie:
+∞
X
1
f (x) =
an =
π
n=−∞
·Z
¸
2π
0
0
0
f (x ) exp(−inx ) dx exp(inx)
(A.16)
0
o, ancora più chiaramente se usiamo il seno e il coseno:
f (x)
=
=
¾
Z 2π
Z 2π
∞ ½
1X
0
0
0
0
0
0
f (x )dx +
cos nx
f (x ) cos nx dx + sin nx
f (x ) sin nx dx
π n=1
0
0
0
Z 2π
∞ Z
1 X 2π
1
0
0
f (x )dx +
f (x0 ) cos n(x0 − x)dx0
(A.17)
2π 0
π n=1 0
1
2π
Z
2π
0
0
Quali sono i vantaggi della serie di Fourier rispetto ad altre serie, per esempio quella di Taylor? Anzitutto
esse possono essere usate per rappresentare anche funzioni discontinue. Inoltre sono particolarmente vantaggiose
per rappresentare funzioni periodiche. Se f (x) ha periodo 2π, è solo naturale che noi la espandiamo in una serie
di funzioni con periodo 2π, 2π/2, 2π/3 etc. Naturalmente la periodicità non è necessariamente 2π. Se f (x) è
periodica con periodo 2L, possiamo scrivere:
a0 X n
nπx o
nπx
+
an cos(
) + bn sin(
)
2
L
L
n=1
∞
f (x) =
(A.18)
con
an
bn
=
=
1
L
1
L
Z
Z
+L
−L
+L
−L
f (x0 ) cos(
nπx0
)
L
f (x0 ) sin(
nπx0
)
L
(A.19)
A.2. SERIE DI FOURIER
71
Figure A.2: Onda quadra e sua rappresentazione nello spazio delle frequenze
Consideriamo per esempio un’onda quadra, funzione periodica del tempo t, mostrata in fig. A.2. Sia 2L = T
il periodo dell’onda. Allora 1/T = ν, e ω = 2π/T , quindi:
2
an =
T
Z
T
f (t) cos(nωt)dt
(A.20)
0
e un’equazione analoga per bn . La serie è allora data da:
4V
1
1
1
(cos ωt − cos 3ωt + cos 5ωt − cos 7ωt + .....)
(A.21)
π
3
5
7
Il fatto che compaiono solo i coseni deriva dalla simmetria di f (t). Lo spettro in frequenza sarà allora quello
riportato nella parte destra della figura precedente.
Quindi vediamo che abbiamo potuto esprimere una funzione discontinua, e che se nella coordinata tempo
avevamo un’onda quadra, nella coordinata frequenza, inverso del tempo, abbiamo una frequenza fondamentale
e una serie di armoniche (con peso via via decrescente). Se avessimo considerato l’onda sinusoidale avremmo
avuto solo la frequenza fondamentale.
In aggiunta ai vantaggi di rappresentare funzioni discontinue periodiche, un altro vantaggio della serie di
Fourier è nella risoluzione dei problemi fisici. Supponiamo di voler risolvere l’equazione del moto di una particella
che oscilla guidata dalla forza periodica nel tempo. Se facciamo un’espansione di Fourier della forza, abbiamo
una fondamentale e una serie di armoniche. Le equazioni del moto possono essere risolte per ciascuna delle
armoniche separatamente. Questo è più che un trucco matematico: corrisponde trovare la risposta del sistema
alle frequenza fondamentale e alle armoniche della forza. Quindi in diversi casi nel risolvere un problema fisico
può essere conveniente passare dal dominio dei tempi a quello delle frequenze, o viceversa. Oltre alla coppia
f (t) =
72
APPENDIX A. ONDE. SERIE E TRASFORMATE DI FOURIER
tempo frequenza la serie di Fourier può mettere in relazione anche altre grandezze (l’una il reciproco dell’altra),
come per esempio nel considerare l’equazione di un’onda: φ(r, t) = A exp i(kr − ωt), oltre che ω e t possiamo
considerare la coppia r e k, cioè lo spazio ordinario e lo spazio reciproco. Questo lo vedremo tra poco.
A.3
Trasformata di Fourier
Adesso vediamo come sia possibile rappresentare una funzione non periodica estendendo il campo all’infinito.
In termini fisici questo significa risolvere un singolo impulso un pacchetto d’onda in onde sinusoidali. Per
l’intervallo −L, L una funzione periodica può essere scritta in termine della serie in seno e coseno:
f (x) =
1
2L
Z
L
f (x0 ) dx0 +
−L
∞ Z
1 X L
nπ 0
(x − x) dx0
f (x0 ) cos
L n=1 −L
L
(A.22)
Supponiamo che l’intervallo −L, L sia nello spazio dei tempi, e come in precedenza 2L = T . Allora:
f (t) =
1
T
Z
T
0
f (t0 )dt0 +
∞ Z
2 X T
2nπ 0
(t − t)dt0
f (t0 ) cos
T n=1 0
T
(A.23)
Supponiamo adesso che il periodo T tenda all’infinito ( cioè, la funzione non è più periodica). Poniamo 2nπ/T =
ω, e 2π/T = ∆ω (per T → ∞ difatti il primo termine è finito perché anche n → ∞, mentre il secondo diventa
R +∞
un infinitesimo). Se l’integrale −∞ f (t0 )dt0 esiste ed è finito, quando T → ∞ il primo termine dell’quazione
precedente si annulla, per cui abbiamo:
f (t) =
Z +∞
∞
1X
∆ω
f (t0 ) cos ω(t0 − t)dt0
π n=1
−∞
Ovvero sostituendo la sommatoria con un integrale:
Z
Z +∞
1 ∞
dω
f (t0 ) cos ω(t0 − t) dt0
f (t) =
π 0
−∞
(A.24)
(A.25)
Quest’equazione viene detta integrale di Fourier. Per passare alla forma esponenziale basta tener presente
che l’equazione precedente può essere scritta anche in termini del seno:
Z
Z +∞
1 ∞
f (t) =
dω
f (t0 ) sin ω(t0 − t)dt0
(A.26)
π 0
−∞
Sommando le due equazioni, la seconda moltiplicata per i, e facendo entrambi gli integrali da −∞ a +∞,
abbiamo:
Z +∞
Z +∞
0
1
−iωt
f (t0 )eiωt dt0
(A.27)
e
dω
f (t) =
2π −∞
−∞
Adesso definiamo come trasformata di Fourier della funzione f (t) la
Z ∞
1
g(ω) = √
f (t)eiωt dt
2π −∞
E allora la trasformata inversa è:
(A.28)
A.3. TRASFORMATA DI FOURIER
73
1
f (t) = √
2π
Z
∞
g(ω)e−iωt dω
(A.29)
−∞
La trasformata di Fourier appartiene alla classe matematica delle trasformate, di cui è un caso particolare.
Ciò che la rende particolarmente utile è il fatto che, come abbiamo appena visto, esiste sempre l’operazione di
trasformazione inversa, mentre questo non è necessariamente vero per altri tipi di trasformata. Le equazioni
precedenti definiscono le trasformate di Fourier sotto forma esponenziale. Possiamo naturalmente definire la
trasformata in coseno:
r
Z
2 ∞
f (t) cos ωt dt
g(ω) =
π 0
r Z ∞
2
f (t) =
g(ω) cos ωt dω
π 0
(A.30)
e una analoga per il seno.
Vediamo ora un’applicazione della trasformate. Sia dato un treno finito di onda sinusoidale di frequenza ω0 :
(
sin ω0 t se|t| ≤ N π/ω0
f (t) =
(A.31)
0
se|t| > N π/ω0
con N = un intero. La funzione è rappresentata a destra nella fig. A.3 (N = 2).
Figure A.3: Treno di onda sinusoidale e sua trasformata di Fourier.
Possiamo usare una trasformata nel seno:
r
g(ω) =
Integrando abbiamo:
2
π
Z
N π/ω0
sin ωtdt
0
(A.32)
74
APPENDIX A. ONDE. SERIE E TRASFORMATE DI FOURIER
r
g(ω) =
2
π
½
sin[(ω0 − ω)(N π/ω0 )] sin[(ω0 + ω)(N π/ω0 )]
−
2(ω0 − ω)
2(ω0 + ω)
¾
(A.33)
Per ω0 grande e ω ≈ ω0 , solo il primo termine è importante e corrisponde alla curva disegnata a destra nella
fig. A.3.
Da questo esempio risulta come la trasformata di Fourier possa essere usata per ottenere gli spettri (funzioni
di ω) a partire da un segnale modulato in qualche modo nel tempo, per esempio attraverso un interferometro
in cui uno specchio sia mobile. Questo è il principio di tutte le spettroscopie a trasformata di Fourier. La curva
mostrata sopra ha degli zeri per ∆ω/ω0 = (ω0 − ω)/ω0 = ±(1/N ); ±(2/N ); ... etc. Dal momento che i contributi
fuori dal picco centrale sono piccoli possiamo prendere ∆ω = ω0 /N come una buona misura della dispersione in
frequenza del nostro impulso. Se N è grande (impulso lungo), le dispersione sarà piccola, e viceversa. Se stiamo
trattando onde elettromagnetiche ~∆ω = ∆E. C’è anche incertezza nel tempo, perché la nostra onda di N
cicli richiede 2N π/ω0 secondi per passare. Se prendiamo ∆t = 2N π/ω0 come l’incertezza nel tempo, abbiamo
∆E∆t ≈ h, un analogo classico del principio di indeterminazione.
Che cosa succede se facciamo una trasformata di Fourier di una derivata? Sia:
Z ∞
1
g(ω) = √
f (t)eiωt dt
2π −∞
(A.34)
Facendo la derivata su ambo i membri:
1
g (ω) = √
2π
0
Z
∞
−∞
df (t) iωt
e dt
dt
(A.35)
e integrando per parti:
·
eiωt
g (ω) = √
2π
0
¸+∞
iω
−√
2π
−∞
Z
+∞
f (t)eiωt dt
(A.36)
−∞
Se f (t) si annulla per t → ±∞, abbiamo il semplice risultato:
g 0 (ω) = −iωg(ω)
(A.37)
Cioè la trasformata della derivata di f (t) è −iω volte la trasformata della funzione originale. Questo risultato
è generalizzabile ad una derivata di ordine n:
g (n) (ω) = (−iω)n g(ω)
(A.38)
Come esempio finale facciamo vedere come tramite delle trasformate di Fourier si possa arrivare alla soluzione
dell’equazione d’onda in una dimensione, che come abbiamo visto è la seguente equazione differenziale alle
derivate parziali:
∂2z
1 ∂2z
=
∂x2
c2 ∂t2
(A.39)
Applichiamo la trasformata di Fourier alla coppia spazio/spazio reciproco, cioè moltiplichiamo per eikx e integriamo su x. Abbiamo:
A.3. TRASFORMATA DI FOURIER
75
Z
∞
−∞
∂ 2 z ikx
1 ∂ 2 z ikx
e
dx
=
e dx
∂x2
c2 ∂t2
(A.40)
Adesso definiamo la trasformata di z(x, t):
1
Z(k, t) = √
2π
Z
∞
z(x, t)eikx dx
(A.41)
−∞
e, applicando la regola della trasformata delle derivate, dalla (40) otteniamo:
1 ∂ 2 Z(k, t)
(A.42)
c2
∂t2
Dal momento che non compaiono derivate rispetto a k, l’equazione precedente è una equazione differenziale
ordinaria piuttosto che una equazione differenziale alle derivate parziali. La soluzione è allora molto più facile.
Se all’istante t = 0 z(x, 0) = f (x), abbiamo:
Z ∞
1
Z(k, 0) = √
f (x)eikx dx = F (k)
(A.43)
2π −∞
(−ik)2 Z(k, t) =
La soluzione della equazione differenziale è allora:
Z(k, t) = F (k) exp(±ickt)
(A.44)
Tornando nello spazio x:
z(x, t)
=
=
Z ∞
1
√
Z(k, t)e−ikx dk
2π −∞
Z ∞
1
√
F (k)e−ik(x±ct) dk
2π −∞
(A.45)
Dato che f (x) è la trasformata inversa di F (k), abbiamo alla fine:
z(x, t) = f (x ± ct)
(A.46)
Come avevamo già visto in precedenza. Questo esempio mostra l’utilità della trasformate di Fourier nella
soluzione di problemi fisici.
Riassumendo: le serie e le trasformate di Fourier servono per passare dalla descrizione problema fisico in
termini di una variabile alla descrizione in termini di un’altra, di solito inversa della prima: frequenza contro
tempo, spazio contro spazio reciproco. La serie di Fourier è usata per descrivere una funzione periodica;
l’integrale (o trasformata) di Fourier una funzione non periodica. La relazione tra la serie e l’integrale sono
graficamente illustrate nella fig. A.4.
76
APPENDIX A. ONDE. SERIE E TRASFORMATE DI FOURIER
Figure A.4: Relazione tra serie e integrale di Fourier.