,OSURFHVVRUH3HQWLXP
*0DQGXFKL00RUR$$
Il processore Pentium (introdotto nel 1993) rappresenta l’evoluzione della linea di processori Intel formata dalla serie 8086/88, 80286, Intel386 DX (il
primo a 32 bit, introdotto nel 1985), Intel486 DX, Intel486 SX e Intel486 DX2. Rispetto alle precedenti generazioni, il processore Pentium introduce
notevoli miglioramenti: già nei primi processori della linea Pentium erano presenti: una architettura superscalare, la predizione dinamica dei salti
(G\QDPLFEUDQFKSUHGLFWLRQ), 2 memorie cache da 8Kb ciascuna, una per i dati e una per il codice, un bus di dati a 64 bit. I primi processori Pentium
venivano costruiti con chip contenenti 3 milioni di transistor, realizzati con tecnologia a 0.34 µm; sono utilizzati in sistemi con un clock di processore
nel range 60 ÷ 200 MHz e con un clock di bus di memoria nel range 50/60/66 MHz. Questi aspetti verranno di seguito discussi in maggiore dettaglio
con riferimento ai primi processori Pentium; alla fine di queste note si accennerà brevemente alle evoluzioni di queste caratteristiche presenti nei
successivi processori della medesima linea.
0RGDOLWjRSHUDWLYH
Il Pentium può operare in una di 3 diverse modalità operative (modi):
• modo protetto (3URWHFWHGPRGH)
costituisce la modalità nativa nella quale sono utilizzabili tutte le istruzioni e funzionalità del processore;
• modo reale (5HDO$GGUHVV0RGH)
fornisce il contesto di programmazione dei predecessori a 16 bit (8086/88) con qualche estensione;
• modo di sistema (6\VWHP0DQDJHPHQW0RGH)
fornisce un contesto speciale per l’esecuzione di particolare codice di controllo di sistema, tipicamente in ILUPZDUH, quale il sistema di
controllo automatico dell’alimentazione, in modo trasparente sia alle applicazioni che al sistema operativo
2UJDQL]]D]LRQHGHOOD0HPRULD
In un sistema Pentium la memoria fisica è indirizzata a byte con un indirizzo a 32 bit, con un totale quindi di 4 Gigabyte indirizzabili. Il codice fa però
riferimento ad una gestione della memoria attraverso due meccanismi: la VHJPHQWD]LRQH (sempre abilitata) e la SDJLQD]LRQH: ciò produce un modello di
memoria, chiamato YLUWXDOPHPRU\, in cui lo spazio di indirizzamento da programma è uno spazio logico. L’hardware di segmentazione provvede a
tradurre un indirizzo ORJLFR in un indirizzo OLQHDUH (relativo ad uno spazio ‘piano’ cioè non segmentato); a valle del primo, l’hardware di paginazione,
se abilitato, provvede a tradurre un indirizzo lineare in un indirizzo ILVLFR, altrimenti l’indirizzo lineare coincide con quello fisico.
Il modello di memoria utilizzato nell’architettura Pentium (come pure nei predecessori della famiglia Intel) è pertanto basato sul concetto di segmento.
Lo spazio di indirizzamento viene suddiviso in un certo numero di segmenti; ad ogni segmento è associato un insieme di informazioni quali la
dimensione, che è fissata dal programmatore, l’indirizzo lineare di partenza (EDVH DGGUHVV) ed il livello di protezione. All’interno di ogni segmento
l’indirizzo di una locazione viene specificato da un RIIVHW a 32 bit: di conseguenza, l’indirizzo lineare viene ottenuto sommando l’RIIVHW al EDVHDGGUHVV.
Un segmento può contenere codice, dati o uno VWDFN. La suddivisione in segmenti consente in generale una maggiore affidabilità dei programmi e del
sistema (si pensi solo all’automatica rilocabilità del codice): è comunque possibile imporre una visione ‘piana’ (ovvero lineare, non segmentata) della
memoria semplicemente associando il medesimo EDVHDGGUHVV a tutti i segmenti.
Possono essere definiti fino a 16383 segmenti, ognuno ampio fino a 4 Gbyte, ottenendo quindi uno spazio di indirizzamento virtuale di 64 Terabyte.
Ogni segmento è identificato da un VHOHWWRUH (VHJPHQWVHOHFWRU) a 16 bit che include un indice (13 bit) in una tabella, contenuta in memoria centrale, che
a sua volta contiene un massimo di 8192 GHVFULWWRUL GL VHJPHQWR. In ogni istante sono attive due tabelle di descrittori, una globale (GDT, *OREDO
GHVFULSWRU WDEOH), comune a tutti i programmi, e una locale (LDT, /RFDO GHVFULSWRU WDEOH) associata al singolo programma. È compito del sistema
operativo fissare la coppia di tabelle attive impostando due registri macchina (GDTR e LDTR) che contengono i rispettivi indirizzi iniziali delle tabelle
in uso, mentre il selettore include anche un bit che precisa quale delle due tabelle deve essere utilizzata per la traduzione e altri 2 bit che specificano il
livello di privilegio nell’accesso. Un descrittore di segmento è composto da 8 byte che includono, in un particolare formato, il EDVHDGGUHVV a 32 bit, la
dimensione del segmento misurata con granularità 1 byte oppure 4 Kbyte da una posizione limite da 20 bit (quindi la dimensione di un segmento varia
rispettivamente nei range 1 byte÷1 Mbyte, 4 Kbyte÷4 Gbyte), il livello di privilegio d’accesso e altre informazioni associate al segmento.
Per motivi di efficienza del meccanismo di traduzione indirizzo logico - indirizzo lineare, durante l’esecuzione del programma possono essere attivi
(immediatamente accessibili) fino a 6 segmenti: i loro rispettivi selettori vengono caricati nella parte visibile di altrettanti registri macchina (VHJPHQW
UHJLVWHU). Il caricamento di un selettore in uno di questi registri comporta l’automatico caricamento, in una parte non visibile del registro, del
corrispondente descrittore: in questo modo il EDVH DGGUHVV e la dimensione del segmento saranno disponibili direttamente nel processore per tutti i
successivi accessi a quel segmento. Il registro CS è relativo al &RGH6HJPHQW, utilizzato per memorizzare il codice; il registro SS è relativo allo 6WDFN
6HJPHQW, utilizzato per memorizzare lo stack; i registri DS, ES, FS, GS sono relativi a 4 segmenti dati, in particolare il registro DS è relativo al 'DWD
6HJPHQW, il registro ES è relativo allo6WULQJ6HJPHQW, utilizzato per contenere informazioni quali le stringhe alfanumeriche.
I registri di segmento e conseguentemente i segmenti utilizzati nell’indirizzamento delle istruzioni possono essere impliciti (dipendere cioè dal tipo di
istruzione: per esempio istruzioni di manipolazione dello stack utilizzano implicitamente SS) oppure essere esplicitamente indicati nell’istruzione. A tal
scopo l’architettura Pentium consente una notevole flessibilità nell’indirizzamento in memoria riservando a ciò un byte nel codice di istruzione.
La forma più generale di indirizzamento coinvolge un VHJPHQW UHJLVWHU, un EDVH UHJLVWHU, un LQGH[ UHJLVWHU, uno VFDOH IDFWRU (1,2,4,8) ed un
GLVSODFHPHQW fornito nell’istruzione. A parte il EDVH DGGUHVV del segmento, il resto costituisce il calcolo dell’indirizzo effettivo A partire da queste
informazioni, l’indirizzo lineare viene calcolato nell’apposito stadio del ciclo di esecuzione come:
VHJPHQWEDVHDGGUHVV + EDVHUHJLVWHU + (LQGH[UHJLVWHU VFDOHIDFWRU) +GLVSODFHPHQW
Come si vede, l’indirizzamento è estremamente flessibile e può essere utilizzato dai compilatori per un’efficiente organizzazione del codice che accede
ad array uni o multidimensionali e a strutture di dati complesse, evitando di inserire istruzioni per il calcolo esplicito degli indirizzi.
7LSLGLGDWL
Il processore Pentium gestisce, come tipi base, parole a 8 (byte), 16 (ZRUG), 32 (GRXEOHZRUG) e 64 bit (TXDGZRUG). L’ordinamento dei byte in memoria è
di tipo OLWWOH HQGLDQ (la parte meno significativa ad indirizzo più basso). Istruzioni specializzate danno di questi tipi ulteriori interpretazioni quali
naturali, interi (con segno), interi BCD, puntatori QHDU (indirizzo effettivo a 32 bit come RIIVHW), puntatori IDU (indirizzo logico a 48 bit, 16 per il selettore
di segmento e 32 per l’RIIVHW), sequenze di bit (ELWILHOG, fino a 32 bit, e ELWVWULQJ, fino a 232-1 bit), stringhe (sequenze di byte, word o doubleword fino a
4 Gigabyte), IORDWLQJSRLQW in precisione singola (32 bit), doppia (64 bit), estesa (80 bit).
2UJDQL]]D]LRQHGHLUHJLVWUL
Oltre ai 6 registri di segmento, l’architettura Pentium definisce i seguenti registri JHQHUDOSXUSRVH a 32 bit: EAX, EBX, ECX, EDX, EBP, ESI, EDI,
ESP, che possono essere anche utilizzati come EDVHUHJLVWHU e LQGH[UHJLVWHU per l'indirizzamento.
Calcolatori Elettronici 2001/2002 - Processore Pentium
1
Pur essendo in generale interscambiabili, alcuni di questi registri assumono un ruolo particolare in alcune istruzioni. Per esempio, il registro ESP viene
utilizzato come Stack Pointer (ovvero contiene l’RIIVHW della testa dello stack nello Stack Segment), il registro EBP è utilizzato come IUDPHSRLQWHU, i
registri EDI ed ESI sono utilizzati come EDVHUHJLVWHU nel Data Segment e nello String Segment, rispettivamente.
L’indirizzo dell’istruzione successiva durante l’esecuzione del programma viene implicitamente definito dal registro EIP, che contiene l’RIIVHW
dell’istruzione successiva nel &RGHVHJPHQW.
I registri a 32 bit EAX, EBX, ECX, EDX possono essere anche visti come 4 registri a 16 bit (la parte meno significativa di ciascuno), col nome di AX,
BX, CX, DX, oppure come 8 registri ad 8 bit, col nome di: AL, AH, BL, BH, CL, CH, DL, DH ove, ad esempio, AL ed AH indicano rispettivamente il
byte meno significativo ed il byte più significativo del registro a 16 bit AX.
Il registro EFLAGS a 32 bit contiene infine informazioni sullo stato del processore, compresi gli usuali bit di condizione.
3LSHOLQLQJ
Similmente al processore Intel486, il ciclo di esecuzione delle istruzioni che non coinvolgono l’unità IORDWLQJSRLQW è suddiviso nei seguenti 5 stadi:
PF
D1
D2
EX
WB
prefetch
instruction decode
address generate
execute - ALU ed accesso cache
write back
Il primo stadio di esecuzione è chiamato SUHIHWFK perché consiste nella lettura della codifica dell’istruzione successiva alla corrente. Nel secondo stadio
('HFRGH) avviene la decodifica dell’istruzione, mentre nel successivo stadio ('HFRGH) vengono calcolati gli indirizzi effettivi degli operandi. Nello
stadio di ([HFXWH avviene sia l’accesso agli operandi dalla cache di dati che l’effettiva esecuzione dell’istruzione. Conseguentemente, se l’istruzione
obbliga ad un accesso di memoria, l’esecuzione di questo stadio richiederà più di un ciclo di clock. Nello stadio di :ULWHEDFN le istruzioni sono infine
abilitate a modificare lo stato del processore tramite la scrittura dei risultati nei registri o in memoria.
L’architettura superscalare è basata sulla multiplazione delle unità funzionali che soprassiedono al ciclo di esecuzione, ottenendo in questo modo la
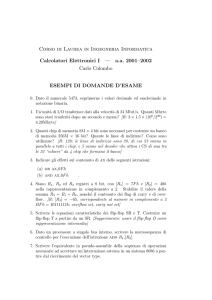
possibilità di eseguire in parallelo stadi omologhi di istruzioni successive. Pertanto, mentre nel processore Intel486 solo una istruzione poteva essere in
corso ad ogni stadio, ottenendo quindi la seguente organizzazione nell’esecuzione della sequenza di istruzioni I1 I2 I3 I4,
PF
D1
D2
EX
WB
I1
I2
I1
I3
I2
I1
I4
I3
I2
I1
I4
I3
I2
I1
I4
I3
I2
I4
I3
I4
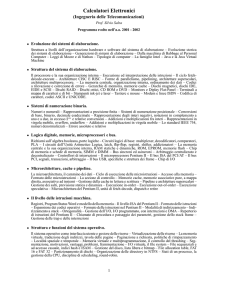
l’architettura superscalare del processore Pentium consente la contemporanea esecuzione di due istruzioni in parallelo per ogni stadio del SLSHOLQH. È
possibile allora, per una sequenza di istruzioni I1 - I8, la seguente organizzazione di esecuzione:
PF
D1
D2
EX
I1
I2
I3
I4
I1
I2
I5
I6
I3
I4
I1
I2
I7
I8
I5
I6
I3
I4
I1
I2
I7
I8
I5
I6
I3
I4
I1
I2
WB
I7
I8
I5
I6
I3
I4
I7
I8
I5
I6
I7
I8
Poiché ogni stadio del SLSHOLQH richiede in genere un periodo di clock per la sua esecuzione, è possibile, in condizione ideale, arrivare ad una frequenza
di esecuzione delle istruzioni pari al doppio della frequenza di clock. Tuttavia diversi fattori limitano questa frequenza teorica: solo un sottoinsieme del
set di istruzioni compatibili può essere eseguito in parallelo, ed inoltre non devono esistere dipendenze tra la coppia di istruzioni eseguita
concorrentemente, come avviene, per esempio, nel caso in cui i risultati della prima istruzione rappresentino l’ingresso della seconda istruzione. In più,
istruzioni di salto possono essere eseguite concorrentemente solo se rappresentano la seconda istruzione della coppia (di seguito verranno illustrate le
conseguenze delle istruzioni di salto nell’esecuzione del SLSHOLQH).
La presenza di una coppia di istruzioni incompatibile viene rilevata durante lo stadio D1 dall’hardware, che provvede a disattivare la seconda unità
durante gli stadi di esecuzione della prima istruzione. Conseguentemente, la seconda istruzione non verrà eseguita in parallelo, ma seguirà la prima nel
SLSHOLQH con uno stadio di ritardo.
)ORDWLQJSRLQWSLSHOLQH
L’unità IORDWLQJSRLQW è integrata nello stesso chip del processore Pentium e consente l’esecuzione di un’istruzione IORDWLQJSRLQW ad ogni ciclo di clock.
È inoltre supportato un limitato parallelismo che consente l’esecuzione concorrente di un’istruzione IORDWLQJ SRLQW e un’istruzione di scambio. La
motivazione di ciò è data dal fatto che i registri IORDWLQJSRLQW sono organizzati in una struttura a stack, e che le operazioni IORDWLQJSRLQW normalmente
coinvolgono la coppia di registri in testa allo stack. Ecco che di frequente avviene che i contenuti dei registri in testa allo stack debbano essere scambiati
fra loro durante l’esecuzione del programma. La scelta dei progettisti è quindi una conseguenza della legge di Amdahl che asserisce che l’incremento
della performance di un computer, ottenuto dal miglioramento di qualche suo componente, è limitato dalla frazione di tempo in cui l’esecuzione del
programma utilizza quel componente.
L’unità IORDWLQJSRLQW è organizzata in un SLSHOLQH con 8 stadi, i cui primi 5 coincidono con gli stadi eseguiti dalle istruzioni intere. Istruzioni IORDWLQJ
SRLQW non possono essere eseguite contemporaneamente (nello stesso stadio) ad istruzioni intere poiché utilizzano per quei 5 stadi le medesime unità
funzionali.
5LVROX]LRQHGHL3LSHOLQH+D]DUG
Come è noto, la reale esecuzione di una sequenza di istruzioni comporta una serie di condizioni che prevengono l’utilizzo ottimale del SLSHOLQH. Tali
condizioni possono essere divise in due principali categorie: GDWDKD]DUG e EUDQFKKD]DUG.
Calcolatori Elettronici 2001/2002 - Processore Pentium
2
Il tipo di GDWD KD]DUG più comune è denominato RAW (UHDGDIWHUZULWH) ed avviene quando l’istruzione deve utilizzare i risultati dell’istruzione
precedente. Esso può avvenire anche nel pipeline del Pentium, poiché la lettura degli operandi viene eseguita nello stadio EX, che avviene
contemporaneamente allo stadio WB (scrittura operandi) dell’istruzione precedente. In tal caso l’hazard è identificato dall’hardware, che provvedere a
sospendere (VWDOO) lo stadio di EX fino a che lo stadio WB dell’istruzione precedente non è terminato.
Il RAW GDWDKD]DUG può anche avvenire nel pipeline dell’unità IORDWLQJSRLQW, ma in tal caso è adottata nel processore Pentium una tecnica, chiamata
E\SDVV, che consente di mettere a disposizione l’informazione richiesta ad uno stadio appena possibile, anche se non ancora riportata in memoria o nei
registri. In questa maniera l’informazione può essere utilizzata nel periodo di clock successivo allo stesso stadio dall’istruzione successiva, mentre
contemporaneamente viene riportata nella memoria o nei registri.
Il EUDQFKKD]DUG avviene quando un’istruzione di salto modifica il flusso di esecuzione di un programma, forzando di conseguenza lo ‘scaricamento’
(IOXVK) degli stadi del pipeline precedenti a quello in cui l’indirizzo effettivo di salto viene calcolato, che sono relativi ad istruzioni che sono state
iniziate ma che in realtà non dovevano essere eseguite e perciò non devono essere completate. L’architettura del Pentium adotta inoltre una tecnica di
predizione (EUDQFKSUHGLFWLRQ) che ‘tira ad indovinare’ l’indirizzo della successiva istruzione già nella prima fase di SUHIHWFK (PF): l’hardware determina
in questa fase se l’istruzione è di salto, ed usa una tabella chiamata %UDQFK3UHGLFWLRQ%XIIHU (BTB), composta di un insieme di coppie di indirizzi.
Utilizzando una tecnica molto simile al’accesso nella memoria cache, viene determinato se è presente nella BTB una coppia di indirizzi il cui primo
indirizzo corrisponde all’indirizzo corrente dell’istruzione di salto. Se tale coppia viene trovata (KLW), il secondo indirizzo viene assunto come l’indirizzo
della successiva istruzione e caricato nel SURJUDPFRXQWHU per la successiva fase di SUHIHWFK. Se tale indirizzo viene previsto correttamente, l’esecuzione
di un’istruzione di salto non comporta alcuna penalità nell’esecuzione del SLSHOLQH. Nella fase EX, quando viene calcolato l’indirizzo effettivo di salto,
viene nuovamente fatto accesso alla BTB per determinare se la previsione fatta risulti corretta. In caso contrario, l’indirizzo effettivo di salto viene
memorizzato nella BTB assieme all’indirizzo dell’istruzione di salto, e viene eseguito il IOXVK del pipeline, annullando quindi la parziale esecuzione
delle tre istruzioni successive e incorrendo in un ritardo di tre periodi di clock. La motivazione alla base di tale tecnica è data dall’osservazione che nella
grande maggioranza dei casi le istruzioni di salto vengono prodotte dai compilatori in corrispondenza a ORRS nel programma. È pertanto assai probabile
che la seconda volta che la stessa istruzione di salto viene eseguita, essa comporterà lo stesso effetto della volta precedente.
Una differente tecnica, adottata in altri processori, ma non nel Pentium, è data dall’utilizzo di GHOD\HGEUDQFK, ovvero di istruzioni di salto il cui effetto
si ha solo un certo numero (uno, due o tre) di istruzioni successive. Ciò consente di evitare il IOXVK del pipeline in caso di salto, ma richiede un’accurata
organizzazione delle istruzioni da parte del compilatore: operazione non sempre applicabile e che comporta conseguentemente il frequente inserimento
di istruzioni NOP (GXPP\) dopo un’istruzione di salto. Utilizzando invece la tecnica di EUDQFKSUHGLFWLRQ, tale inconveniente viene risolto, senza per
altro richiedere alcuna manipolazione del codice.
Va tuttavia osservato che, anche nel Pentium, la qualità di un programma dal punto di vista della velocità di esecuzione, dipende dalla capacità del
compilatore di generare un codice che sfrutti al meglio l’architettura del pipeline (evitando per esempio conflitti RAW) e l’architettura superscalare
(rendendo contigue istruzioni compatibili).
$UFKLWHWWXUDGHOOD&DFKH
Due memorie cache da 8Kbyte ciascuna sono integrate nel processore Pentium, una per le istruzioni (&RGH FDFKH) e una per i dati ('DWD FDFKH).
L’utilizzo di due cache diverse evita i conflitti di accesso che avverrebbero altrimenti quando, per esempio, lo stadio PF legge un’istruzione dalla
memoria e lo stadio WB scrive i risultati dell’istruzione in memoria. Sempre per evitare conflitti di accesso da parte dei vari stadi del pipeline, la cache
ammette la ricerca contemporanea di due indirizzi tramite due porte indipendenti. Ciò consente, per esempio, che l’accesso alla memoria da parte dello
stadio EX non vada in conflitto con la scrittura da parte dello stadio WB.
2UJDQL]]D]LRQH
&RGH&DFKH e 'DWD&DFKH sono organizzate come memorie set-associative a 2 vie. Ogni cache definisce 128 set ed ogni set contiene 2 blocchi (linee),
ognuno con il proprio WDJ. Poiché ogni blocco della cache è composto di 32 byte, in un indirizzo fisico a 32 bit i 5 bit meno significativi sono utilizzati
come RIIVHW all’interno del blocco, un campo intermedio di 7 bit individua il set di appartenenza, e il WDJ è costituito dai 20 bit più significativi.
Ad ogni set, composto da due blocchi, è associato un bit per la determinazione del blocco da rendere invalido quando un nuovo blocco per quel set
(univocamente determinato dall’indirizzo) debba essere caricato dalla memoria. La politica utilizzata per il rimpiazzo è del tipo /HDVW5HFHQWO\8VHG
(LRU) che definisce il blocco da rimpiazzare quella utilizzato meno di recente.
Per quanto riguarda le operazioni di scrittura, è possibile definire, tramite un bit in un FRQWURO UHJLVWHU, sia la politica di ZULWHEDFN (il blocco viene
scritto in memoria centrale solo quando è scaricato) che di ZULWH WKURXJK(la memoria viene riscritta ad ogni accesso in scrittura della cache).
Per supportare architetture multiprocessore, in cui ogni processore dispone della propria cache contenente una copia di parte della memoria (unica)
centrale, la GDWDFDFKH supporta il protocollo ZULWHEDFN MESI (PRGLILHGH[FOXVLYHVKDUHGLQYDOLG). Ad ogni blocco viene associato uno dei seguenti 4
stati:
• M - 0RGLILHG: indica che il blocco è presente in una sola cache del sistema, ed il suo contenuto è diverso da quello della memoria centrale (a causa
di un’operazione di scrittura);
• E - ([FOXVLYH: indica che il blocco è presente in una sola cache del sistema, ed il suo contenuto è uguale a quello della memoria centrale;
• S - 6KDUHG: indica che il blocco è potenzialmente condivisa da altre cache del sistema. Una lettura di un blocco nello stato S non genera attività sul
bus di comunicazione, ma un’operazione di scrittura inizierà un ciclo di ZULWH WKURXJK e invaliderà le altre copie dello stesso blocco nelle altre
cache;
• I - ,QYDOLG: indica che il blocco non è valido e un suo accesso causerà un PLVV, con la conseguente rilettura del blocco dalla memoria centrale.
L’architettura della cache supporta pertanto anche la possibilità che un’operazione di scrittura in un blocco 6KDUHG inizi un ciclo di VQRRSLQJsul bus di
comunicazione, in cui le copie eventualmente presenti nelle altre cache vengono invalidate. Tale operazione non interferisce con le normali operazioni
di accesso locale poiché una terza porta indipendente della cache (oltre alle due citate prima) è riservata esclusivamente alle operazioni di VQRRSLQJ.
2UJDQL]]D]LRQHGHOODSDJLQD]LRQH
Tutti gli indirizzi gestiti dalla cache sono indirizzi fisici, ovvero corrispondono alle effettive locazioni di memoria dei byte indirizzati. Per supportare
sistemi paginati, l’architettura Pentium definisce un 0HPRU\0DQDJHPHQW8QLW (MMU) per la traduzione di indirizzi lineari in indirizzi fisici che, se
abilitata, precede l’accesso alla cache.
La memoria viene normalmente suddivisa in pagine di 4 Kbyte: le pagine fisiche sono allineate su frontiera 4 Kbyte. Di conseguenza, i 12 bit meno
significativi dell’indirizzo lineare contengono l’RIIVHW all’interno della pagina. Sono definiti due livelli di tabella per l’organizzazione delle tabelle delle
pagine. I 10 bit più significativi (bit 22÷31) dell’indirizzo identificano un HQWU\ nel 3DJH GLUHFWRU\, il cui indirizzo iniziale è caricato in un registro
macchina (PDBR); il 3DJHGLUHFWRU\ è rappresentato da una pagina contenente un massimo di 1024 entry a 32 bit. Ogni entry identifica a sua volta una
3DJHWDEOH, contenendo, oltre ad altri bit di controllo, i 20 bit più significativi dell'indirizzo iniziale della 3DJHWDEOH. All’interno di questa i bit 12÷21
dell’indirizzo lineare identificano un 3DJH7DEOH(QWU\ contenente, oltre ad altri bit di controllo, i 20 bit più significativi dell’indirizzo fisico iniziale
della pagina di memoria corrispondente: a questi viene giustapposto l’RIIVHW prelevato dall’indirizzo lineare per ottenere l’indirizzo fisico della locazione
cui far accesso. Il sistema operativo può stabilire se associare un unico 3DJHGLUHFWRU\ a tutti i task in esecuzione oppure riservarne uno per ciascun task
o adottare una situazione intermedia tra le due.
Calcolatori Elettronici 2001/2002 - Processore Pentium
3
Una speciale eccezione viene sollevata nel caso che l’HQWU\ nel 3DJHWDEOH (o nel 3DJHGLUHFWRU\) indirizzato segnali, con l’apposito bit di controllo, che
la pagina non è presente in memoria: in questo caso gli altri bit dell’HQWU\ possono essere utilizzati dal sistema operativo, attivato dall’eccezione
sollevata, per indicare dove prelevare, ad esempio in memoria secondaria. la pagina da caricare in memoria centrale. La gestione dell’eccezione si
completa con la riesecuzione dell’istruzione che non si era potuta completare per mancanza della pagina.
Poiché 3DJHGLUHFWRU\ e 3DJHWDEOH risiedono tutti in memoria, una traduzione da indirizzo lineare ad indirizzo fisico, necessaria ogni volta che si debba
eseguire un accesso alla memoria, richiederebbe due accessi aggiuntivi alla memoria. Per ovviare la maggior parte delle volte a tale inconveniente,
associato a ciascuna cache vi è un 7DEOH /RRNDVLGH %XIIHU (TLB) che consente la rapida trasformazione dell’indirizzo lineare. Il TLB ha
un’organizzazione molto simile alla cache, e definisce un certo numero di coppie di WDJ (20 bit) ed indirizzo (32 bit). Tale struttura consente di ricavare
l’indirizzo fisico della pagina corrispondente ai 20 bit più significativi dell’indirizzo lineare eseguendo una ricerca nel TLB. Se viene identificata una
coppia il cui WDJ corrisponde ai 20 bit cercati, l’indirizzo fisico associato indica l’indirizzo iniziale della pagina corrispondente. Meccanismi del tutto
analoghi a quelli utilizzati nella cache provvedono al rimpiazzo delle coppie tag-indirizzo quando il TLB risulti pieno ed una nuova traduzione venga
richiesta. In base al principio di località, che asserisce che nella maggior parte dei casi l’accesso in memoria tende ad essere localizzato, il meccanismo
di traduzione rapido offerto dal TLB risulta molto efficiente, poiché nella stragrande maggioranza dei casi l’accesso alla memoria causerà un hit nel
TLB, e non richiederà cicli di clock aggiuntivi per l’accesso in memoria delle tabelle delle pagine.
%XVGL&RPXQLFD]LRQH
Il bus di comunicazione del Pentium è caratterizzato da 64 linee di dati. È pertanto possibile trasferire fino ad 8 byte in un singolo ciclo di
lettura/scrittura. L’indirizzamento è a 32 bit, consentendo quindi, come già detto, uno spazio di indirizzamento fisico di 4 Gbyte. Una conseguenza della
dimensione del data bus è che per l’indirizzamento vengono utilizzate 29 linee, corrispondenti ai bit A31-A3 di indirizzo. L’indirizzamento del singolo
byte, concettualmente specificato anche dai bit A2-A0 di indirizzo, viene ottenuto tramite 8 linee (B0-B7) che specificano il sottoinsieme (contiguo)
degli 8 byte trasferito nel ciclo di lettura/scrittura (similmente alle linee LDS e UDS nel 68000 per un data bus a 16 bit).
Il bus di comunicazione supporta le seguenti operazioni:
- 6LQJOHWUDQVIHUF\FOH: trasferimento di un singolo dato (byte, word, double word, quadword). Se la memoria, e più in generale la periferica indirizzata,
è sufficientemente veloce, l’intero ciclo di trasferimento richiede due periodi di clock: se consideriamo un ciclo di lettura ad esempio, al primo periodo
di clock il processore attiva le linee di indirizzo A31-A3 e le linee di selezione byte B0-B7, e segnala la validità dell’indirizzo tramite la linea di
controllo ADS# (# significa in logica negata). La disponibilità del dato è segnalata dalla periferica tramite la linea di controllo BRDY#, che viene
acquisita dal processore al successivo periodo di clock, assieme al dato. Se la periferica non è sufficientemente veloce, il processore inserisce dei cicli di
attesa (ZDLWF\FOH) fino a che la linea BRDY# indicherà la disponibilità del dato.
- %XUVW 7UDQVIHU: questo trasferimento è utilizzato quando si debba trasferire una sequenza di dati ad indirizzi consecutivi. Dopo il primo ciclo di
trasferimento, in cui viene presentato l’indirizzo iniziale del blocco di dati da trasferire, nei successivi cicli l’indirizzo (consecutivo) dei dati viene
calcolato dall’hardware esterno che pertanto mette direttamente a disposizione il dato, segnalato dalla linea BRDY#. È quindi possibile ottenere una
frequenza di trasferimento pari a 8 byte per ogni periodo di clock, nel caso il dispositivo esterno sia sufficientemente veloce, e quindi il processore non
debba inserire cicli di attesa.
- /RFNHG7UDQVIHU: tramite la linea di controllo LOCK# è possibile definire una sequenza atomica di operazioni sul bus. Ciò consente, ad esempio, la
modifica di locazioni di memoria tramite una lettura seguita da una scrittura con la garanzia che nel frattempo il bus non venga utilizzato da qualche
altro processore, possibilmente modificando la locazione di memoria.
- %XV2ZQHUVKLS0DQDJHPHQW: tramite le linee di controllo HOLD e HLDA è possibile la richiesta da parte di un processore di diventare il proprietario
del bus (bus holder) e quindi di supervisionare l’attività del bus. Questo tipo di protocollo è utilizzato sia in un sistema multiprocessore, che in un
sistema a singolo processore quando, ad esempio, un DMA FRQWUROOHU esterno richiede il bus per eseguire un trasferimento da/per la memoria centrale.
- ,QWHUUXSW$FNQRZOHGJH: questo ciclo viene eseguito in risposta ad un interrupt, per ottenere dalla periferica l’LQWHUUXSWYHFWRU (compreso tra 0 e 255)
richiesto per identificare la routine di interruzione associata.
- ,QTXLUH&\FOH: questo ciclo viene eseguito in conseguenza ad un accesso in scrittura ad una linea dalla cache il cui stato è S (6KDUHG), per invalidare
eventuali altre copie della stessa porzione di memoria contenute nelle cache degli altri processori del sistema. Il ciclo viene eseguito dopo aver ricopiato
il contenuto della linea in memoria centrale, e coinvolge le linee del bus A31-A5, necessarie per l’identificazione della linea (blocco di 32 byte) nelle
cache.
,2F\FOHV: cicli di Ingresso/Uscita sono equivalenti ai normali cicli di trasferimento dati (sia burst che non) salvo che la linea di controllo M/IO# del
bus indica all’hardware esterno che è in corso un’operazione di I/O. Lo spazio di indirizzamento a disposizione delle operazioni di I/O è di 64 Kbyte, ed
il set di istruzioni del Pentium definisce esplicitamente istruzioni di Ingresso/Uscita che trasferiscono il contenuto di un registro interno da e per i
registri esterni dei dispositivi di I/O (I/O port). È possibile definire anche un’architettura di I/O memory mapped, non utilizzando quindi la linea M/IO#.
In questo caso le periferiche vengono viste come normali locazioni di memoria, e per la programmazione vengono utilizzate le normali istruzioni di
trasferimento dati.
(YROX]LRQLUHFHQWL
La linea Pentium, introdotta nel 1993, è andata costantemente evolvendosi (con i processori della famiglia P6: Pentium Pro, Pentium MMX, Pentium II,
...), fino agli attuali processori Pentium III e agli imminenti Pentium 4, che consentono prestazioni estremamente elevate. Di seguito si elencheranno
brevemente le nuove tecnologie adottate.
30LFURDUFKLWHFWXUH'\QDPLF([HFXWLRQ7HFKQRORJ\
Definisce nuove tecniche di EUDQFKSUHGLFWLRQ per la predizione del nuovo indirizzo anche attraverso EUDQFK multipli, consentendo quindi la riduzione
delle operazioni di IOXVK del pipeline, e garantendo quindi una maggiore velocità di esecuzione. La sequenza delle istruzioni viene inoltre
opportunamente riordinata (VFKHGXOHG) al fine di utilizzare al meglio il parallelismo insito nell’architettura superscalare e di ridurre i GDWDKD]DUG nel
SLSHOLQH. Si osservi che questo riordino, a differenza del riordino delle istruzioni eseguito dallo stadio di ottimizzazione del compilatore, viene eseguito
dall’hardware UXQWLPH, garantendo tuttavia la correttezza del programma.
3HQWLXP352
Si tratta di un processore con architettura interna di tipo RISC (istruzioni CISC x86 ricondotte a microistruzioni RISC86 0LFUR2SV). Il SLSHOLQH è a 14
stadi e il fattore superscalare è 3 (3 SLSHOLQH). Vi sono inoltre 2 FDFKH di primo livello (L1) da 8 Kbyte (una per le istruzioni, una per i dati) e una di
secondo livello (L2) interna (integrata nel medesimo chip del processore) da 512/1024 Kbyte. Altre caratteristiche: include 5.5 milioni di transistor con
tecnologia 0.35 µm, viene usato in sistemi con clock di processore nel range 150÷200 MHz e clock di bus di memoria da 66 MHz, con possibilità di
multiprocessing (2 o 4 processori).
3HQWLXP00;
Introdotto nel 1997, utilizza la tecnologia MMX che comprende un nuovo set di 57 istruzioni per la rapida elaborazione di grosse quantità di dati.
Questa tecnologia è principalmente orientata all’aumento delle prestazioni di applicazioni grafiche, che normalmente richiedono la manipolazione di
grandi flussi di dati. La linea MMX introduce anche la tecnologia SIMD (6LQJOH ,QVWUXFWLRQ 0XOWLSOH 'DWD) consentendo la manipolazione di interi
Calcolatori Elettronici 2001/2002 - Processore Pentium
4
vettori di dati nella singola istruzione. È inoltre definito un set esteso di registri che introduce 8 nuovi registri a 64 bit. Altre caratteristiche: include 4.5
milioni di transistor con tecnologia 0.35 µm, viene usato in sistemi con clock di processore nel range 166÷266 MHz e clock di bus di memoria da 66
MHz.
3HQWLXP,,HQXRYR/D\RXW
Il processore Pentium II non consiste di un singolo chip, ma è composto di una cartuccia (SEC FDUWULGJHSDFNDJLQJ) contenente più chip collegati fra
loro da bus dedicati. Ciò consente l’utilizzo di FDFKH L1 da 32 Kbyte (due da 16) e FDFKH L2 di 512 Kbyte, quest’ultima collegata al processore tramite
un bus indipendente dal bus di sistema ('XDO,QGHSHQGHQW%XVDUFKLWHFWXUH), consentendo quindi una più elevata banda di comunicazione. La FDFKH di
secondo livello supporta inoltre l’utilizzo di codici ECC ((UURU&RUUHFWLRQ&RGH) per minimizzare la probabilità di errori di comunicazione.
La frequenza di clock supportata dalla linea Pentium II è compresa tra 233 MHz e 450 MHz; quella del bus di memoria è di 66 o 100 MHz. Tali
prestazioni sono ottenute riducendo a 0.25 micron lo spessore dei componenti integrati nel chip, cosa che ha consentito di ottenere chip con 7.5 milioni
di transistor.
3HQWLXP,,,
L’organizzazione interna è simile al Pentium II, inizialmente (versione Katmai) con FDFKH L2 esterna da 512 Kbyte, successivamente (versione
Coppermine) con FDFKH L2 interna, e quindi più veloce, da 256 Kbyte. Rispetto al Pentium II ha in più:
un set di 70 istruzioni (SSE – 6WUHDPLQJ6,0'([WHQVLRQV) (SIMD = Single Instruction Multiple Data) in più pensate per rendere più veloci le
elaborazioni multimediali;
frequenza di FORFN tra 500 MHz e 1 GHz, bus di memoria a 100 MHz – 133 MHz;
tecnologia 0.25 – 0.18 µm: chip con quasi 28 milioni di transistor.
3HQWLXP
Introdotto alla fine del 2000, presenta una organizzazione interna innovata rispetto alla 3 (indicata con il termine 1HWEXUVW) caratterizzata da una
pipeline di 20 stadi (K\SHUSLSHOLQHG), da 2 ALU che operano a una frequenza doppia rispetto al clock principale, da un bus interno da 256 bit con cui è
collegata la FDFKH L2 interna da 256 Kbyte. La FDFKH L1 per le istruzioni è in grado di contenere 12000 0LFUR2SV, quella per i dati è da 8 Kbyte.
Presenta inoltre:
un set di 144 nuove istruzioni (SSE 2) per rendere più veloci le elaborazioni multimediali;
frequenza di FORFN a partire da 1.5 GHz, bus di memoria a 400 MHz;
tecnologia 0.18 µm: chip con 42 milioni di transistor.
Calcolatori Elettronici 2001/2002 - Processore Pentium
5