SENSORI PER GRANDEZZE MECCANICHE
Sono utili per la misura di:
grandezze legate al moto, come posizione, spostamento, rugosità superficiale, velocità di
flusso, velocità di rotazione, ...
grandezze legate alle forze, come peso, pressione, accelerazione, torsione, trazione,
vibrazioni, ...
Uno dei fenomeni maggiormente sfruttati è la variazione di resistività di un materiale
sottoposto ad una deformazione (effetto piezoresistivo)
EFFETTO PIEZORESISTIVO
L’effetto piezoresistivo fu scoperto da Kelvin nel 1856. I primi sensori commerciali di
deformazione, costituiti da semplici fili metallici, furono introdotti nel 1936. Nel 1954 si
scoprì che i semiconduttori presentano un effetto piezoresistivo molto maggiore dei
metalli. Oggi si fa enorme uso di sensori di deformazione (strain gauges) in campo edilizio,
aeronautico, automobilistico, …
L
La variazione relativa di resistenza di uno strain gauge è data da:
dR d dL dA
R
L
A
Ma:
dA
dD
2
A
D
essendo D il diametro del conduttore, da cui si ottiene:
A
dR d
L 2 D
R
in cui D = dD/D e L = dL/L
Definendo il fattore di misura K = (dR/R)/(dL/L) = (dR/R)/ L si ottiene:
K
d
L1 1 2
in cui
D
L
(coefficiente di Poisson)
Effetto piezoresistivo nei metalli
Nei metalli si trova che d/ 0 e quindi il fattore di misura K dipende solo da effetti
geometrici (si parla di piezoresistività geometrica)
K 1 2 2
Fra i metalli più utilizzati ci sono le leghe NiCr 80/20 (K=2.1), PtW 92/8 (K=4), NiCu
45/55 (costantana, K=2.1), NiCrMoFe 36/8/0.5/55.5 (K=3.6)
Effetto piezoresistivo nei semiconduttori
Alcuni semiconduttori, fra cui silicio e germanio, presentano un effetto piezoresistivo molto
superiore ai metalli. Ad esempio nel silicio il fattore K può superare 150. Negli anni
sessanta la scoperta di questa proprietà fece esplodere l’interesse verso questo materiale
per le applicazioni sensoristiche.
Si-p [111] 1 cm
K=173
Si-n [111] 1 cm
K= - 13
Si-p [110] 1 cm
K=121
Si-n [110] 1 cm
K= - 89
Si-p [100] 1 cm
K=5
Si-n [100] 1 cm
K= - 153
EFFETTO PIEZORESISTIVO NEL SILICIO
Il fenomeno piezoresistivo nel silicio ha origine dalla
sua struttura a bande. Per la banda di conduzione è
noto che il minimo assoluto di energia si ha per
elettroni che si muovono nella direzione cristallina
100 con una certa q.tà di moto p 0. Nelle altre
direzioni esistono altri minimi relativi della CB.
A ciascuna valle corrisponde una massa efficace per
gli elettroni che la occupano. Per il silicio la me nella
direzione 100 non è la minima. In particolare le me
degli elettroni nelle valli lungo 010 e 001 sono più
piccole.
La mobilità nel Si è la media delle mobilità delle
varie valli, pesata sul numero di elettroni che le
occupano.
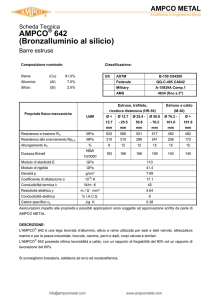
INTERPRETAZIONE FISICA DELL’EFFETTO PIEZORESISTIVO
La compressione del cristallo lungo la direzione 100 provoca una distorsione delle bande ed
un riallocamento degli elettroni. In particolare si ha un abbassamento del minimo assoluto
con conseguente migrazione di elettroni verso questo minimo. La conseguenza è una
diminuzione della mobilità media degli elettroni (fattore K < 0). Ovviamente il fenomeno si
osserva in silicio di tipo n.
L’entità del fenomeno è molto legata al livello di drogaggio.
Compressione nella direzione 100: il minimo di energia lungo 100 si abbassa mentre nelle altre
due direzioni i minimi si alzano. Si ha migrazione di elettroni dalle valli 010 e 001 verso la valle
100 (caso a)
Per silicio molto drogato, pur in presenza di variazioni dei minimi di energia, la percentuale di
elettroni coinvolti nel riallocamento è inferiore (caso b).
Per silicio debolmente drogato, data l’iniziale scarsa disponibilità di elettroni, il riallocamento
può interessare un’elevata frazione di questi (caso c).
Il silicio è un semiconduttore a simmetria cubica, per cui, in assenza di sollecitazioni
meccaniche esterne, gli elettroni che occupano le diverse valli si muovono tutti nella direzione
del campo elettrico applicato e la resistività non è una funzione della direzione del flusso di
corrente E = J (ovvero J=σ E), con E e J paralleli.
Le cose cambiano drasticamente se si sottopone il silicio ad uno stress meccanico. In questo
caso si osserva una forte dipendenza di dalla direzione lungo cui è applicata la forza e dalla
direzione del campo elettrico. In generale E e J non sono più paralleli:
Ei o 1 d ij J j
in cui o è la resistività a riposo
(in assenza di stress meccanico dij=0)
I coefficienti dij rappresentano la variazione relativa di resistività per una data direzione del
campo ed una data direzione della corrente.
E1 J1 d11
1
E2 J 2 d 21
o
E3 J 3 d 31
d12
d 22
d 32
d13 J1
d 23 J 2
d 33 J 3
in virtù della simmetria cubica:
E1 J1 d1
1
E2 J 2 d 6
o
E3 J 3 d 5
d6
d2
d4
d 5 J1
d 4 J 2
d 3 J 3
I coefficienti dij dipendono ovviamente dal tipo e dall’entità dello stress meccanico a cui è
sottoposto il materiale:
0
0 1
d1 11 12 12 0
d
0
0
0
11
12
2 12
2
d 3 12 12 11 0
0
0 3
0
0 44 0
0 4
d 4 0
d5 0
0
0
0 44 0 5
0
0
0
0 44 6
d 6 0
xy=zy
xz=yz
yx=zx
in cui:
1 2 3 sono le componenti normali e 4 5 6 sono le componenti tangenziali ( xy xz yz )della
sollecitazione meccanica [N/cm2] che deve essere nota in ogni punto del volume del
semiconduttore.
11 12 44 sono detti coefficienti piezoresistivi
[ cm]
11 [10-7 cm2 N-1]
12
44
Si-n
11.7
-102.2
53.4
-13.6
Si-p
7.8
6.6
-1.1
+138.1
Per sfruttare adeguatamente la piezoresistività
dei materiali è dunque necessario conoscere con
precisione quali sono le direzioni del cristallo
lungo le quali il fenomeno è maggiore.
contatti
F
membrana
resistore integrato
Esempio: caso della membrana (bidimensionale).
Poiché un sensore integrato in genere è
costituito da una superficie che si flette sotto
l’azione di una forza, ed è quindi sottoposta
principalmente ad uno sforzo parallelo ed uno
normale alla direzione della corrente,
assumono
particolare
importanza
due
coefficienti piezoresistivi, || e
e sono le componenti della tensione
contatti
meccanica che si sviluppa nella membrana
per effetto del carico F.
F
membrana
e sono i coefficienti piezoresistivi
resistore integrato
Sotto stress meccanico:
dR d
R
perpendicolare e parallelo, che dipendono
dall’orientazione del resistore rispetto a
quella del cristallo su cui è stato realizzato.
Ei
o 1 d ij
Jj
o
o
d ij
dunque
o d o d
o
o
PIEZOELETTRICITA’
In alcuni materiali l’applicazione di uno stress meccanico produce una polarizzazione elettrica
e, viceversa, l’applicazione di un campo elettrico produce una deformazione meccanica.
L’effetto piezoelettrico è comunemente utilizzato per la conversione di segnali meccanici o
acustici in segnali elettrici (microfoni, pick-up per giradischi, misuratori di rugosità, …).
I materiali piezoelettrici sono prevalentemente caratterizzati da cristalli che non hanno un
centro di simmetria ed in cui gli atomi sono legati da legami ionici.
GaAs, ZnO, GaP, CdS, ZnSe sono piezoelettrici perché una deformazione meccanica provoca
un movimento relativo fra i baricentri delle cariche positive e negative (che a riposo
coincidono). In alcune ceramiche i baricentri delle cariche positive e negative non coincidono
già a riposo. In esse l’effetto p.e. è dovuto alla rotazione dei dipoli a seguito di una
deformazione.
Il silicio ed il germanio non hanno proprietà piezoelettriche perché sono cristalli
centrosimmetrici.
Sensori p.e. possono essere integrati su silicio attraverso la deposizione sul chip di strati di
adeguati materiali compatibili (p.es. ZnO).
Gauge factor = 1.6105
fmax = 28 MHz
CRISTALLI PIEZOELETTRICI
La maggior parte dei materiali piezoelettrici sono solidi cristallini (mono- o poli-cristalli), cioè
è possibile immaginare il solido come composto da una sequenza infinita (in tutte le direzioni)
di parallelepipedi uguali, senza vuoti intermedi. Il parallelepipedo fondamentale è detto cella
unitaria. Per ogni materiale cristallino è possibile individuare svariate celle unitarie. In genere
la cella unitaria è la più piccola possibile che meglio corrisponde alle facce naturali del
cristallo.
Per caratterizzare un cristallo piezoelettrico è necessario valutare le sue costanti
piezoelettriche. Queste sono definite in funzione di un sistema di riferimento. E’ possibile usare
un riferimento cartesiano (x, y, z), o in alternativa gli assi naturali (a, b, c). Gli assi naturali
attraversano alcuni spigoli del cristallo (scelti per avere la massima simmetria nella
rappresentazione) e non sono quasi mai ortogonali.
Esistono sette sistemi cristallini, suddivisi in base al grado di simmetria. All’interno dei sette
sistemi sono poi individuate 32 classi (in base al grado di simmetria rispetto ad un punto).
Di queste, 20 classi sono potenzialmente piezoelettriche.
Cella elementare del quarzo
L’applicazione della forza nella direzione
indicata (asse polare) produce la comparsa di
un dipolo.
F
O (-2)
O (-2)
Si (+4)
O (-2)
O (-2)
La carica che si sviluppa ai capi di un campione di
materiale piezoelettrico sottoposto ad una deformazione è
proporzionale alla forza meccanica applicata:
P d
in cui P è la densità di carica [C/m2] e è la forza applicata
per unità di area [N/m2]. Il coefficiente di proporzionalità d
si chiama costante piezoelettrica [C/N].
L’effetto inverso è descritto dalla relazione:
xdE
in cui x è la deformazione [L/L] (strain) ed E è il campo
elettrico applicato [V/m].
La valutazione delle stato tensionale
Sia che si parli di materiali piezoresistivi che piezoelettrici, per valutare l’entità
dell’effetto prodotto da una deformazione in un campione di tali materiali, occorre
risalire al suo stato tensionale interno a partire dalle deformazioni stesse (o viceversa).
(1, 2,
3 ) e sei componenti normali delle tensioni (4, 5, 6 , 7, 8, 9 ).
Lo stato tensionale è descritto da nove componenti, tre componenti assiali
Per motivi di simmetria le componenti si riducono a sei.
Le relazioni precedenti diventano:
1
6
Pi dij j
j 1
2
3
3
x j dij Ei
i 1
quindi la matrice dij dovrebbe essere composta da 18 termini. In realtà nei materiali di
interesse solo alcuni di questi termini sono diversi da zero.
d12= -d11
si noti che i pedici 1, 2 e 3
identificano rispettivamente
gli assi X, Y e Z
Esempio (monodimensionale): un blocchetto di
quarzo sottoposto ad una forza Fx parallela
all’asse X.
La carica che si accumula sulle facce metallizzate
è data da:
Fx
q A1 P1 A1 1d11 A1 d11 Fx d11
A1
(indipendente dall’area).
Se la forza è applicata lungo Y si ha:
q A1 P1 A1 2 d12 A1
Fy
A2
d12 A1
Fy
A2
d11
Stress (tensione) e Strain (deformazione)
1-D state of stress-strain
(trave sottile o membrana)
In cui:
vp
strain trasversale t
strain assiale
a
rapporto di Poisson
Esempio: mensola incastrata (cantilever)
Il materiale
superficie.
piezo
viene
applicato
sulla
A seguito dell’applicazione della forza F, la
tensione tangenziale in superficie vale:
6 F l x
x
t2 w
ed è massima in x=0.
Muovendosi lungo lo spessore della mensola, lo stress si annulla al centro ed assume valore
opposto (compressione) in corrispondenza della superficie inferiore. La deflessione
all’estremità vale:
4 F l3
d
E wt3
La frequenza di risonanza vale:
E
f 0.16
1
2
t
l2
densità del materiale
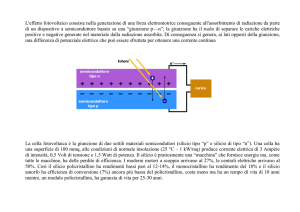
Esempio di un microsensore di deformazione
utilizzato per un Microscopio a Forza Atomica
(AFM).
Il film di ZnO è deposto per sputtering.
Il sensore può essere utilizzato in condizioni
statiche misurando le variazioni di resistenza
attraverso il film (piezoresistivo), o in condizioni
dinamiche misurando la carica elettrica che si
accumula sui contatti (piezoelettrico).
Nel primo caso la caratteristica I-V è descritta da
una relazione del tipo:
V
I
C
in cui C ed sono opportune costanti.
Esempio di un accelerometro piezoresistivo
in silicio realizzato con tecniche di
micromachining.
In
presenza
di
un’accelerazione verticale l’inerzia della
massa di silicio deforma la leva su cui è
deposto un materiale piezoresistivo.
Sensori di questo tipo possono misurare
accelerazioni da 0.01 g a 100 g.
Esempio di un sensore di pressione
piezoresistivo in silicio. Il sensore misura
una pressione differenziale (p1 – p2).
Per la fabbricazione della parte in silicio si
ricorre alle tecniche di attacco anisotropo
del Si in KOH.
acciaio
Trasduttori ad onda acustica superficiale (SAW)
Nella piezoelettricità lineare le equazioni elastiche sono legate a quelle della carica mediante
i coefficienti piezoelettrici. Ma in generale le variabili elettriche non sono statiche come non
lo sono le variabili elastiche (equazioni elettriche e meccaniche dinamiche).
Per questo motivo un elemento tagliato da un
cristallo vibra ad una sua frequenza
meccanica naturale. Poichè le proprietà
meccaniche sono molto stabili (p.es: quarzo),
anche le frequenza di oscillazione è stabile.
I dispositivi SAW costituiscono un’importante
applicazione dei materiali piezoelettrici. In
essi sono sfruttati gli aspetti dinamici della
propagazione delle onde acustiche ed
elettriche accoppiate.
Nel caso più frequente all’ingresso avviene
una conversione da energia elettrica in
meccanica (acustica), all’uscita da meccanica
in elettrica.
segnale esterno
(luce, deformazione,
temperatura, ...)
E/A
A/E
segnale acustico
materiale piezoelettrico
Durante la propagazione attraverso il mezzo piezoelettrico, l’onda acustica può subire
modificazioni dovute all’azione di segnali esterni.
Attraverso un mezzo solido possono propagarsi tre tipi di onde meccaniche:
1)
onde longitudinali: la compressione del reticolo avviene nella stessa direzione
di propagazione dell’onda.
2)
onde trasversali: il reticolo oscilla trasversalmente alla direzione di
propagazione.
3)
onde acustiche superficiali (Surface Acoustic Waves), o di Rayleigh, in cui si
ha la composizione di onde trasversali e longitudinali.
Lord Rayleigh studiò le SAW dal 1885. La caratteristica principale è che esse
si propagano lungo la superficie e decadono verso l’interno del mezzo entro
uno spessore confrontabile con la lunghezza d’onda.
L’applicazione che ha reso celebri le SAW fu un trasduttore interdigitato (White e Voltmer,
1965). Il dispositivo è in sostanza una linea di ritardo.
Applicando un segnale RF all’ingresso, si genera un’onda acustica che si propaga alla
velocità caratteristica del mezzo (p. es. quarzo o LiNBO3). Il massimo trasferimento di
segnale in ingresso si ha quando la distanza fra i contatti interdigitati coincide con la
lunghezza d’onda nel mezzo (interferenza costruttiva). Il materiale assorbente alle estremità
elimina le onde riflesse.
Il segnale rilevato all’uscita presenta un ritardo dato L/v. Poichè la velocità v di propagazione
dell’onda acustica è molto inferiore a quella dell’onda elettromagnetica, si possono ottenere
linee di ritardo dalle dimensioni molto contenute.
Per esempio nel quarzo
v = 3.4 km/s.
Quindi se L= 1cm si ha:
r = 2.9 s
Amplificando il segnale in uscita ed applicandolo all’ingresso si ottiene un risuonatore a
linea di ritardo.
L’oscillazione si verifica se:
1)
il guadagno d’anello è maggiore di 1
2)
il ritardo di fase introdotto è pari a - 2n (n intero)
Il ritardo di fase è dato da:
f c d a 2tr
linea ritardo
in cui:
d 2
amplificatore
r
2 f c r
Tc
fc
trasduttori
2 n a 2tr
2 r
Poichè le onde viaggiano in superficie, la modificazione di parametri come la luce, la
pressione, la temperatura, ecc, produce una variazione del ritardo r e quindi della fc,
che può essere misurata direttamente.
In alcuni casi la misura si effettua per differenza rispetto ad un altro risuonatore uguale
ma non soggetto alle stesse sollecitazioni dall’esterno.
Sensori di gas o di sostanze chimiche sono stati realizzati ricoprendo i risuonatori con
materiali che reagiscono alla specie da rivelare.
Il silicio non è direttamente utilizzabile per fabbricare risuonatori SAW, ma ricorrendo
alle tecnologie dei film sottili si possono deporre su silicio strati di altri materiali con
proprietà piezoelettriche (ZnO)
Sensori di pressione capacitivi
La deformazione di una membrana o diaframma in conseguenza della variazione della
pressione differenziale ai due lati, può essere utilizzata per realizzare sensori capacitivi.
Tali sensori possono essere fabbricati ricorrendo alle convenzionali tecnologie
microelettroniche e non richiedono la deposizione di materiali con proprietà particolari.
Questi sensori possono essre anche più sensibili di quelli piezoelettrici o piezoresistivi, ma
nella maggiornaza dei casi la risposta non è lineare.