SISTEMI OPERATIVI
SOFTWARE DI BASE
Il software di base comprende tutti quei programmi indispensabili ai fini del
funzionamento dell’elaboratore, per questo viene detto di base. I S.O. rientrano
nella categoria del software di base.
SOFTWARE APPLICATIVO
Il software applicativo comprende tutti quei programmi che servono a risolvere
all’utente uno specifico problema. Esempi di software applicativo sono i programmi:
word, excel, powerpoint, internet explorer, videogiochi, ecc.
SISTEMA OPERATIVO
Il S.O. è un insieme di programmi che coordinano il funzionamento delle
componenti HARDWARE e SOFTWARE del computer e ne consentono l’utilizzo da
parte dell’utente.
In pratica un S.O. deve:
• Permettere all’utente di usare tutte le risorse del sistema in modo semplice e
immediato
• Ottimizzare l’uso delle risorse adottando le più adeguate politiche di gestione
RISORSA
Per risorsa si intende un generico elemento del computer sia esso hardware (CPU,
Memoria centrale, Dispositivi) che software (Programmi, Dati).
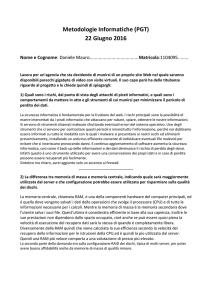
Come è possibile vedere dall’immagine sotto, il S.O. fa da interfaccia tra l’hardware
ed il software applicativo che l’utente sceglie di eseguire.
E’ il S.O. in funzione sul computer che consente all’utente di poter avviare i
programmi applicativi desiderati.
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 1 di 26
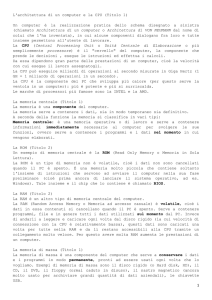
L’interfaccia che il S.O. presenta all’utente può essere di due tipi:
1. Testuale, detta a linea di comando (CLI - Command Line Interface)
2. Grafica, chiamata anche GUI (Graphic User Interface)
Le interfacce di tipo CLI, come quella mostrata nella figura sotto, prevedono che
l’utente debba conoscere lo specifico comando con la rispettiva sintassi da digitare
al fine di far svolgere al S.O. una determinata operazione (es: creazione di una
cartella, copia di un file, ecc.).
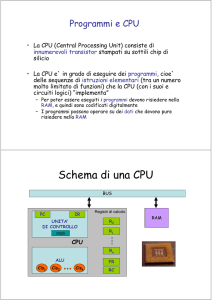
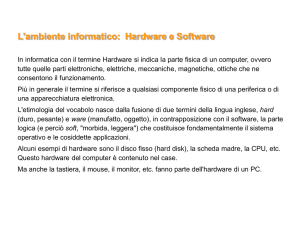
Le interfacce di tipo GUI, come quelle mostrate nelle figure sotto, fanno uso di
piccole immagini grafiche dette icone, per ricordare all’utente quale applicazione
può avviare tramite l’icona. Vengono usati i menù per ricordare tutte le opzioni ed i
comandi a disposizione dell’utente, oltre che finestre per l’esecuzione di
applicazioni. Questo tipo di interfaccia è molto più semplice da utilizzare per un
utente inesperto, infatti, viene detta user friendly.
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 2 di 26
Sistema operativo Windows
Sistema operativo Linux
Il S.O. più l’hardware del computer creano una macchina virtuale per l’utente che lo
utilizza, il quale si astrae completamente dalle caratteristiche e dal funzionamento
dei componenti vedendo solo quello che il S.O. gli mette a disposizione.
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 3 di 26
PROCESSO
Per processo si intende un programma in esecuzione da parte della CPU, infatti, non
è corretto dire che un processo è in esecuzione ma piuttosto che è nello stato di
avanzamento.
Il modello a buccia di cipolla (figura sopra) è un modello a strati che mostra in
dettaglio i moduli (programmi fondamentali) che compongono il S.O., cioè:
1. Nucleo o Kernel o Gestore dei processi che contiene le procedure di gestione
della CPU e i programmi di gestione delle interruzioni. E’ lo strato più vicino
all’hardware e quindi dipende strettamente da esso. Il nucleo si occupa di:
a. Creare e cancellare i processi
b. Mantenere aggiornato lo stato dei processi e del processore
c. Allocare la risorsa processore in base a una specifica politica di gestione
d. Rilasciare il processore
e. Gestire la sincronizzazione tra i vari processi
f. Gestire le interruzioni
2. Gestore della memoria centrale che contiene le routine per gestire
l’organizzazione della memoria e per accedere agli indirizzi delle singole celle
di memoria. Esso si occupa di:
a. Tenere traccia di quali parti della memoria sono libere e quali sono
occupate
b. Decidere quanta memoria allocare ad un processo in base a una
specifica politica di gestione
c. Allocare e liberare lo spazio di memoria dedicato ad un processo e
memorizzarne le informazioni
3. Gestore delle periferiche o dell’I/O che contiene i programmi di gestione dei
singoli dispositivi e si occupa di gestire l’assegnazione dei dispositivi ai vari
processi che ne fanno richiesta secondo una politica di gestione. Esso si
occupa di:
a. Tenere aggiornato lo stato delle periferiche
b. Decidere l’allocazione delle periferiche in base a una specifica politica di
gestione
c. Allocare la risorsa e iniziare l’operazione di I/O
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 4 di 26
d. Rilasciare la risorsa
4. Gestore delle informazioni o File System che si occupa della gestione dei file
ed in particolare di controllare ed organizzare come avviene la
memorizzazione delle informazioni sulle memorie di massa (hard disk, floppy
disk, schede di memoria, ecc.). Esso si occupa nello specifico di:
a. Conoscere lo stato delle memorie di massa, il loro uso e il modo di
accesso
b. Decidere che può utilizzare le informazioni in base a una specifica
politica di gestione
c. Assegnare la risorsa al processo
d. Rilasciare la risorsa
e. Creare e cancellare file e cartelle
f. Permettere la copia dei file
L’organizzazione a strati dei moduli del S.O. è basata sul fatto che un determinato
modulo sfrutta i servizi offerti dal modulo sottostante senza conoscere quello che
c’è al di sotto (astrazione) e offre delle funzionalità al livello sovrastante, creando
così una macchina virtuale per il livello superiore. Da questo punto di vista gli strati
del S.O. hanno una struttura di tipo gerarchico.
Di tutto il S.O. l’unico modulo che deve sempre essere presente in memoria centrale
è il nucleo, mentre gli altri risiedono in Ram solo quando debbono essere eseguiti,
altrimenti normalmente sono presenti su memoria di massa.
Indici delle prestazioni di un Sistema Operativo
Il S.O. al pari degli altri software deve anch’esso essere eseguito dalla CPU, questo
significa che la sua esecuzione ruba del tempo all’esecuzione dei programmi lanciati
dall’utente, quindi, possiamo dire che un S.O. è tanto più efficiente quanti più
programmai riesce ad eseguire nel minor tempo possibile a parità di configurazione
hardware.
Possiamo individuare alcuni indici di prestazioni di un S.O.:
1. Tempo di Attività della CPU, espresso in percentuale e dato dal rapporto tra il
tempo di lavoro della CPU ed il tempo di lavoro dell’intero sistema, cioè
%CPU = Tcpu / Ttotale (dove Ttotale = Tcpu + tempo I/O)
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 5 di 26
2. Throughput, che indica il numero di programmi eseguiti nell’unità di tempo,
cioè:
Throughput = N / Ttotale
3. Tempo S.O. su tempo totale, che indica il rapporto tra il tempo che la CPU
dedica all’esecuzione del S.O. ed il tempo totale di esecuzione da parte della
CPU, cioè:
Tso su Ttot = Tcpu S.O. / Tcpu Totale
4. Turnaround Time, che indica il tempo trascorso tra l’istante iniziale e quello
finale di esecuzione di un programma, cioè:
TT = tempo finale – tempo iniziale
Considerando il Turnaround Time di n lavori è possibile calcolare il tempo medio di
esecuzione degli n lavori con la seguente formula:
=
∑ dove ATT sta per Average Turnaround Time e TTi sta per il tempo di esecuzione
dell’iesimo lavoro.
Classificazione dei Sistemi Operativi (in base alle modalità di input)
1. Elaborazione a lotti (batch): è una modalità di funzionamento del S.O. che
prevede che i dati da elaborare vengono accumulati su una memoria ausiliaria
prima dell’elaborazione, che avviene in tempi prefissati, e che al termine
fornisce i risultati. Durante l’esecuzione del programma non è possibile fornire
dati in input, quindi non esiste interattività tra l’utente ed il processo in corso.
I S.O. batch sono molto semplici, dato che non prevedono alcuna interfaccia
utente e non debbono gestire più programmi presenti in memoria
contemporaneamente.
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 6 di 26
2. Elaborazione interattiva: è una modalità di funzionamento del S.O. che
prevede la possibilità per l’utente di interagire con il programma in
esecuzione, fornendo dati in input durante l’elaborazione. L’interazione tra
ciascun utente e l’elaboratore centrale avviene mediante il videoterminale,
che consente l’invio di dati e comandi tramite tastiera all’elaboratore centrale
e la visualizzazione dei risultati ricevuti da quest’ultimo sullo schermo.
Classificazione dei Sistemi Operativi (in base alle modalità di gestione della CPU)
1. Sistema Operativo monoprogrammato: è un S.O. in grado di gestire
l’esecuzione di un programma utente alla volta, il che lo rende un software
non molto complesso. Solo al termine dell’esecuzione di un programma,
l’utente potrà lanciarne un altro. Un classico esempio di S.O.
monoprogrammato è l’MS-DOS (MicroSoft-Disk Operating System), divenuto
oramai obsoleto. In figura sotto è possibile vedere il contenuto della memoria
nel caso di utilizzo di un S.O. monoprogrammato.
memoria RAM
Sistema
Operativo
Programma
utente
2. Sistema Operativo multiprogrammato: è un S.O. in grado di caricare in
memoria più programmi utente contemporaneamente e di ripartire fra questi
l’uso delle risorse. Questi S.O. migliorano nettamente le prestazioni del
sistema sfruttando i tempi morti della CPU dovuti alle operazioni di
Input/Output, cioè in pratica quando un programma in esecuzione ha la
necessità di svolgere una operazione di I/O, la CPU anziché restare senza far
nulla in attesa del termine di questa operazione, viene assegnata ad un altro
programma che deve essere eseguito, qualora quest’ultimo dovesse
effettuare anch’esso una operazione di I/O, l’utilizzo della CPU ritornerebbe al
programma che precedentemente era stato sospeso. Con una politica di
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 7 di 26
gestione di questo tipo si cerca di tenere il più possibile la CPU al lavoro
(tempo di attività %CPU molto elevato). La sensazione dell’utente è che il
sistema stia eseguendo più programmi contemporaneamente, mentre in
realtà è grazie alla velocità di esecuzione della CPU che passa da un
programma all’altro, quindi in un dato istante è in esecuzione un solo
programma. In figura sotto è possibile vedere il contenuto della memoria nel
caso di utilizzo di un S.O. multiprogrammato.
memoria RAM
Sistema
Operativo
Programma
utente 1
Programma
utente 2
Programma
utente 3
Nell’immagine sotto è possibile vedere un grafico che illustra l’utilizzo della CPU
rispetto al tempo in un S.O. monoprogrammato.
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 8 di 26
Nell’immagine sotto è possibile vedere un grafico che illustra l’utilizzo della CPU
rispetto al tempo in un S.O. multiprogrammato.
I vantaggi dei S.O. multiprogrammati sono:
• Esecuzione di più programmi contemporanemante;
• Migliore gestione delle risorse;
Gli svantaggi sono:
• Maggiore complessita del S.O.;
• Uso di algoritmi specifici per la gestione delle risorse: CPU, memoria e
dipositivi di I/O;
In un S.O. multiprogrammato, quando un programma in esecuzione richiede di
svolgere una operazione di I/O, la CPU viene liberata dal compito di gestione di tale
operazione grazie all’utilizzo degli Elaboratori di Canale, i quali si preoccupano di
gestire l’intero processo di I/O svincolando la CPU e consentendole quindi di
dedicarsi all’esecuzione di altri programmi.
3. Sistema Operativo time-sharing
I S.O. multiprogrammati così come descritti sopra presentano un grosso problema,
cioè nel caso in cui un programma è in possesso della CPU e non necessita mai di
fare operazioni di I/O continua a mantenerne il possesso in modo esclusivo, non
consentendo agli altri programmi presenti in memoria di poter avanzare
nell’esecuzione. Per ovviare a questo problema sono stati introdotti i S.O. multi
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 9 di 26
programmati in Time-Sharing, cioè a condivisione di tempo, in pratica il S.O. assegna
la CPU a ciascun programma per un quanto di tempo predefinito chiamato time slice
terminato il quale il S.O. toglie la CPU al programma che ha terminato il suo quanto
di tempo e la assegna al prossimo che ne ha diritto. Con un meccanismo di gestione
della CPU di questo tipo si ha l’impressione che tutti i programmi lanciati si
eseguono contemporaneamente. Windows è un S.O. time-sharing monoutente,
mentre Linux è un S.O. time-sharing multiutente.
4. Sistema Operativo distribuito
I S.O. distribuiti consentono di utilizzare più CPU connesse tra di loro come se si
trattasse di un unico sistema di elaborazione, al quale ci si può connettere da
qualsiasi punto. Ogni CPU aumenta le capacità di calcolo del sistema e può accadere
che un programma sia in esecuzione su più processori contemporaneamente.
5. Sistema Operativo realtime
I S.O. realtime sono utilizzati specificamente in applicazioni industriali e nel controllo
di processo, ovvero in tutte quelle situazioni in cui è necessaria una rapidissima
valutazione degli input ed una relativa risposta in uscita in modo tale da controllare
in tempo reale l’avanzamento di un processo automatizzato dal computer.
6. Sistema Operativo dedicato o transazionale
Sono S.O. utilizzati per specifiche applicazioni e quindi diversi dai classici S.O. che
permettono l’utilizzo dell’elaboratore per qualsiasi necessità dell’utente mediante
l’uso del programma specifico.
Il Nucleo di un Sistema Operativo
Il Nucleo del S.O. si occupa principalmente di:
1. Mantenere aggiornato lo stato del processore (libero/occupato)
2. Decidere a quale processo assegnare il processore secondo una specifica
politica di gestione
3. Assegnare il processore al processo scelto
4. Riprendere il controllo del processore quando il processo è terminato o
sospeso oppure è terminato il quanto di tempo di CPU spettante
Il Nucleo di un S.O. si compone dei seguenti programmi:
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 10 di 26
1.
2.
3.
4.
5.
Lo schedulatore dei lavori (Scheduler a lungo termine)
Lo schedulatore dei processi (Scheduler a breve termine)
Il controllore del traffico (Dispatcher)
Il gestore delle interruzioni
Le procedure di sincronizzazione e comunicazione tra processi
In ogni istante un programma che deve essere eseguito dal sistema, può trovarsi in
uno degli stati descritti dal seguente diagramma, che indica in quello specifico
momento a che punto dell’intero processo di esecuzione si trova il programma.
A ciascuno stato corrisponde una specifica situazione in cui si può trovare un
processo ed in particolare:
• HOLD: indica che l’utente ha chiesto al sistema l’esecuzione di un programma
presente su memoria di massa (ad esempio con un doppio click sull’icona nel
caso di windows);
• READY: indica che il S.O. ha caricato in memoria RAM il programma che deve
essere eseguito, quindi è pronto per l’esecuzione;
• RUN: indica che il processo è in esecuzione da parte della CPU, è chiaro che in
un sistema dotato di un solo processore, un solo processo potrà trovarsi in
questo stato in un determinato momento;
• WAIT: indica che il processo è in attesa del completamento di una operazione
di Input/Output;
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 11 di 26
• END: indica che il processo di esecuzione è terminato.
Esaminiamo ora in corrispondenza di quali eventi avvengono le transizioni tra gli
stati del diagramma:
• Transizione 1: avviene quando lo schedulatore dei lavori (scheduler a medio
termine) decide di caricare in memoria RAM un programma scelto tra quelli
che si trovano nella lista dei processi in stato di Hold, in questo caso viene
rimosso il JCB dalla lista di Hold e viene creato un PCB del processo e aggiunto
in coda alla lista di Ready;
• Transizione 2: avviene quando lo schedulatore dei processi (scheduler a breve
termine) decide di assegnare la CPU al processo scelto fra quelli presenti nella
lista di Ready, in questo caso viene rimosso il PCB dalla lista di Ready e viene
aggiunto alla lista di Run;
• Transizione 3: avviene quando un processo in esecuzione (stato RUN) chiede
di svolgere una operazione di Input/Output, in questo caso viene rimosso il
PCB dalla lista di Run e viene aggiunto in coda alla lista di Wait;
• Transizione 4: avviene quando un processo in esecuzione (stato RUN) termina
il quanto di tempo di CPU assegnatogli (time slice) e quindi torna nello stato di
Ready, in questo caso viene rimosso il PCB dalla lista di Run e viene aggiunto
in coda alla lista dei processi nello stato di Ready;
• Transizione 5: avviene quando un processo in attesa (stato WAIT) termina di
svolgere una operazione di Input/Output e quindi diventa pronto per
continuare l’esecuzione, in questo caso viene rimosso il PCB dalla lista di Wait
e viene aggiunto in coda alla lista dei processi nello stato di Ready;
• Transizione 6: avviene quando un processo in fase di avanzamento (stato
RUN) termina l’esecuzione.
Sia il JCB che il PCB sono strutture dati (tipicamente dei Record) che contengono
informazioni specifiche sul programma/processo ed in particolare:
1. Il JCB (Job Control Block) contiene le seguenti informazioni:
a. L’identificativo del programma
b. La dimensione in Kbyte
c. L’indirizzo di caricamenti da memoria di massa
d. Gli identificatori delle periferiche
e. Il puntatore al JCB successivo
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 12 di 26
2. Il PCB (Process Control Block) contiene le seguenti informazioni:
a. L’identificatore del processo (PID)
b. L’identificatore del padre, il puntatore al suo PCB
c. Il puntatore alla lista dei figli
d. Lo stato in cui si trova: RUN, READY, WAIT, ecc.
e. Il registro di salvataggio
f. L’indirizzo di caricamento in memoria centrale
g. Gli identificatori delle periferiche
h. I file aperti
La figura sotto riporta una ipotetica situazione delle liste dei processi in stato di
HOLD e di READY, evidenziando cosa accade quando un processo transita da uno
stato all’altro:
Guardando la figura sopra è possibile notare che, in corrispondenza della transizione
1: da stato di HOLD a stato di READY, il JCB del programma viene eliminato dalla lista
HOLD ed il PCB del processo corrispondente viene aggiunto in coda alla lista READY.
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 13 di 26
Algoritmi di scheduling
Lo schedulatore a lungo termine (Job Scheduler) nello scegliere quale programma,
tra quelli presenti nella coda di HOLD, caricare in RAM e quindi far diventare
processo (con relativo inserimento nella coda di READY), può adottare uno dei
seguenti algoritmi:
1. FIFO (First In First Out): I lavori vengono prelevati dalla lista di HOLD secondo
l’ordine di arrivo e vengono inseriti nella coda di READY, si tratta di una
politica semplice ma che non ottimizza al meglio la gestione delle risorse;
2. Priorità statica: ad ogni lavoro presente nella lista di HOLD viene assegnato un
livello di priorità in base all’importanza della sua esecuzione, in questo modo
il job scheduler sceglierà di caricare in memoria il programma con il livello di
priorità più elevato presente nel JCB, nel caso di uguale priorità si adotta il
metodo FIFO;
3. Priorità dinamica: per evitare di privilegiare sempre gli stessi programmi
dotati di priorità più elevata, il S.O. aumenta il valore della priorità dei
programmi in funzione del tempo di permanenza nella lista di HOLD. Per
attuare questa politica, bisogna memorizzare nel JCB il tempo di inserimento
in coda del programma.
Lo schedulatore a breve termine (Process Scheduler) nello scegliere a quale
processo assegnare la CPU tra quelli presenti nella coda di READY deve rispettare dei
criteri generali quali: imparzialità, efficienza, risposta in tempo reale, turnaround
time minimizzato, throughput massimizzato e fairness. Gli algoritmi che può
adottare lo Job Scheduler possono essere: non preemptive e preemptive in
dipendenza del fatto di lasciare la CPU assegnata ad un processo fin quando termina
o chiede di svolgere una operazione di I/O oppure di toglierla anche durante la sua
esecuzione.
Algoritmi di scheduling non preemptive:
1. FCFS (First Come First Served): la CPU viene assegnata al primo processo
presente nella coda di READY e così via. Tale politica ha un tempo medio di
attesa abbastanza lungo e non privilegia i processi brevi;
2. SJF (Shortest Job First): la CPU viene assegnata al processo che ha il più breve
tempo di utilizzo della CPU prima di una operazione di I/O. Il problema di
questa politica è che dei tempi di esecuzione è possibile fare solo una stima.
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 14 di 26
3. Scheduling con priorità: in questo caso viene associata una priorità ad ogni
processo presente nella coda di READY, il processo scelto per l’assegnazione
della CPU è quello con priorità più elevata. La priorità può essere calcolata
tenendo conto sia del tempo di esecuzione che di quello di permanenza
all’interno della coda di READY, quindi:
à =
+ in questo modo si privilegiano i processi brevi e quelli che attendono da più
tempo.
Algoritmi di scheduling preemptive:
1. Round Robin: la CPU viene assegnata a turno per un quanto di tempo (time
slice) a ciascuno dei processi della coda di READY secondo l’ordine di arrivo,
quindi con una gestione di tipo FIFO. Qualunque processo che si trova a
transitare da uno stato a quello di READY verrà inserito in coda.
2. Round Robin a percentuale di tempo: il round robin tradizionale rischia di
penalizzare fortemente i processi che fanno spesso operazioni di I/O, dato che
al termine questi vengono inseriti in coda alla lista dei processi READY,
indipendentemente dal fatto di aver sfruttato in tutto o in parte il loro time
slice prima dell’inizio dell’I/O. Il RR a percentuale di tempo, invece, tiene
conto del tempo di time slice sfruttato dal processo prima dell’operazione di
I/O, facendolo rientrare nella coda di READY in una posizione tanto più
avanzata quanto più bassa è stata la percentuale di time slice consumata
precedentemente.
3. Round Robin limitato: fissato un certo numero N di time slice, si utilizza
l’algoritmo di RR tradizionale fino a quando un processo non consuma i suoi N
time slice, dopodiché viene inserito in un’altra coda che verrà presa in
considerazione solamente quanto tutti i processi avranno usufruito dei loro N
time slice.
4. Priorità statica: ad ogni processo viene attribuita una priorità, per esempio in
base al tempo di esecuzione stimato, lo scheduler terrà conto di questo valore
per inserire i processi in coda.
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 15 di 26
5. Priorità dinamica: il S.O. modifica la priorità sulla base del tempo di utilizzo
della CPU, per esempio in base al fatto che il processo ha sfruttato o meno
interamente il suo time slice.
L’assegnazione della CPU a un nuovo processo comporta il salvataggio del PCB
del vecchio processo, la scelta del processo a cui assegnare la CPU ed il
caricamento del suo PCB. Il tempo impiegato per il cambio di contesto è
chiamato overhead di sistema e deve essere minimizzato.
Gli Interrupt
L’interrupt è il meccanismo mediante il quale vengono comunicati alla CPU alcuni
eventi ben precisi, ad esempio lo scadere di un time slice, un errore in un
programma, ecc.
Un interrupt hardware è un segnale che viene inviato da un dispositivo di I/O alla
CPU.
Un interrupt software è invocato da un processo attraverso specifiche istruzioni per
richiedere al S.O. di svolgere una operazione di I/O.
La CPU fin dall’accensione svolge il ciclo istruzione, che le consente di eseguire una
istruzione di un programma, ma che ripetuto ciclicamente consente di eseguire
interi programmi. Il ciclo istruzione si compone delle seguenti fasi:
1. ripeti
2.
se non c’è stato un interrupt allora
3.
fetch (preleva l’istruzione dalla memoria)
3.
decode (decodifica l’istruzione caricata)
4.
execute (esegue l’istruzione)
5.
altrimenti
6.
eseguire routine di interrupt
7. finché non viene spento il sistema
La commutazione dell’esecuzione dal programma corrente alla routine di servizio
dell’interruzione comporta le seguenti operazioni:
• Salvataggio dello stato del programma corrente nel suo PCB in memoria RAM;
• Esecuzione della routine di servizio dell’interrupt;
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 16 di 26
• Ripristino delle informazioni sullo stato del programma precedentemente
interrotto, prelevate dal PCB presente in memoria RAM;
I principali tipi di interruzioni sono:
1. Hardware interrupt: causata da malfunzionamento o guasto hardware;
2. Supervisor call interrupt: chiamata da un modulo supervisore per una
richiesta di I/O;
3. Program interrupt: istruzione non valida, overflow, violazione delle aree di
memoria protette;
4. External interrupt: causata dalla fine del time slice o dalla pressione dei tasti
CTRL+C;
5. I/O interrupt: in caso di comando di I/O errato, canale o dispositivo non
correttamente connesso.
Interrupt multipli
Può accadere che mentre la CPU sta eseguendo una routine di servizio
dell’interruzione arrivi un’altra richiesta di interruzione, la scelta se continuare
l’esecuzione della routine in corso oppure sospenderla e dedicarsi all’esecuzione
della routine di servizio della nuova interruzione giunta può essere fatta basandosi
su un meccanismo a priorità, in questo modo solo se la nuova richiesta di
interruzione ha una priorità più elevata di quella in corso, quella attuale verrà
sospesa e la gestione passerà a quella nuova, altrimenti la nuova richiesta di
interrupt verrà gestita solo al termine di quella corrente. E’ anche possibile
effettuare il mascheramento di un interrupt, andando a resettare o a settare il bit
corrispondente del registro delle interruzioni.
Per quanto riguarda la tecnica che permette di sapere in caso di più richieste in
contemporanea quale dispositivo ha fatto richiesta, è possibile adottarne una fra le
seguenti:
1. Interruzioni vettorizzate: in questo caso la periferica che ha generato
l’interrupt genera anche un codice che consente alla CPU di identificare
direttamente il dispositivo e attivare la corrispondente routine di servizio
dell’interruzione;
2. Ciclo di polling: i dispositivi che hanno generato un interrupt settano un
opportuno flag, che esaminato dalla CPU tramite una interrogazione ciclica di
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 17 di 26
tutti i flag delle periferiche, consente di capire chi ha fatto richiesta e quindi di
attivare la corrispondente routine di servizio dell’interruzione.
Il Gestore della Memoria centrale di un Sistema Operativo
Un programma per poter essere eseguito dalla CPU deve prima essere caricato in
memoria RAM. Lo spazio di memoria occupato da un programma è composto dalla
zona dati (variabili del programma) e dalla zona istruzioni (i codici macchina
eseguibili) che insieme formano il cosiddetto spazio degli indirizzi del programma.
Può accadere che un programma durante la sua esecuzione venga più volte caricato
in RAM dalla memoria di massa (swap in) e viceversa (swap out), il che comporta
che ad ogni caricamento andrà ad occupare indirizzi di memoria differenti.
Possiamo distinguere i seguenti tipi di indirizzi:
1. Indirizzo simbolico: l’utilizzo del nome di una variabile nel caso di
assegnazione di un valore, sia in linguaggio ad alto livello che in linguaggio
assembly è un esempio di indirizzo simbolico;
2. Indirizzo logico: si tratta di un indirizzo numerico ma che non corrisponde
all’indirizzo fisico della locazione di memoria cui effettivamente farà
riferimento il programma durante la sua esecuzione;
3. Indirizzo virtuale: si tratta ancora di riferimenti logici che dovranno essere
trasformati nei reali indirizzi fisici nel momento in cui il programma verrà
caricato in RAM;
4. Indirizzo fisico: sono i reali indirizzi di memoria RAM.
La trasformazione degli indirizzi logico-virtuali in indirizzi fisici durante l’esecuzione
del programma, viene svolta da un circuito hardware dedicato presente
internamente alla CPU chiamato MMU (Memory Management Unit).
La rilocazione consiste nell’andare, all’atto del caricamento in Ram del programma
da eseguire, a trasformare gli indirizzi logici in indirizzi fisici. La rilocazione può
essere di tipo:
1. Statica: se all’atto del caricamento in RAM del programma tutti gli indirizzi
logici vengono trasformati in fisici. Questa operazione richiede un tempo di
preparazione iniziale del programma elevato e ne vincola il funzionamento
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 18 di 26
solo a quella porzione di memoria usata per l’allocazione. Tipicamente usato
nei S.O. mono task;
2. Dinamica: in questo caso il calcolo dell’indirizzo fisico viene effettuato solo in
corso di esecuzione del programma, ciò significa che tutti gli indirizzi cui esso
fa riferimento all’atto del caricamento in RAM vengono lasciati inalterati, in
pratica restano indirizzi logico-virtuali.
Il gestore della memoria del S.O. svolge i seguenti compiti:
1. Tiene traccia di quali intervalli di indirizzi corrispondono ad aree di
memoria libere o occupate;
2. Assegna la memoria centrale ai processi che ne fanno richiesta;
3. Gestisce le operazioni di swap-in e swap-out secondo opportune politiche
di gestione;
4. Recupera la memoria centrale al termine di un processo.
Tecniche di gestione della memoria
1. Allocazione a singola partizione: è una tecnica utilizzata nei S.O.
monoprogrammati che prevede di utilizzare la parte di memoria RAM non
occupata dal S.O. per allocarvi il programma utente. Il meccanismo di protezione
è realizzato tramite l’uso di un registro limite che contiene l’indirizzo di memoria
al di sotto del quale il programma utente non deve accedere per non invadere la
porzione di RAM dedicata al sistema operativo. In questo modo se la RAM libera
è grande rispetto alla dimensione del programma in esecuzione si ha uno spreco
di memoria, se risulta troppo piccola per contenerlo il programma non può
essere caricato ed andare in esecuzione, in pratica quindi una tecnica che non
ottimizza la gestione della risorsa memoria centrale.
2. Allocazione a partizioni multiple: è una tecnica usata nei S.O. multiprogrammati
e si basa sulla suddivisione dello spazio RAM disponibile in più partizioni, dove
ogni partizione potrà ospitare un programma permettendo così la
multiprogrammazione. Il gestore della memoria deve tenere traccia delle
partizioni libere e di quelle occupate, come pure deve attuare il meccanismo di
protezione che impedisce ad un processo di accedere ad indirizzi di memoria
esterni alla propria partizione.
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 19 di 26
2.1.Partizioni multiple statiche: in questo caso la dimensione delle partizioni è
fissata in anticipo dal sistemista che stabilisce per ottimizzarne lo
sfruttamento partizioni di dimensioni differenti, cioè piccole, medie e grandi
in modo tale da poter soddisfare le esigenze dei vari programmi. Questa
tecnica genera una frammentazione degli spazi residui di ciascuna partizione
che impedisce l’allocazione di altri programmi la cui occupazione sarebbe
inferiore allo spazio libero totale. Nella figura seguente è visibile la tabella di
gestione della partizioni.
Nella figura seguente è possibile vedere un esempio di occupazione della
memoria con la relativa tabella delle partizioni.
2.2.Partizioni multiple dinamiche: questa tecnica consiste nel non definire in
anticipo la dimensione delle partizioni, in modo tale da allocare una
partizione delle esatte dimensioni necessarie al programma da eseguire.
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 20 di 26
Purtroppo anche questa tecnica a seguito di operazioni di allocazione e
deallocazione al termine dell’esecuzione di un programma, tende a generare
delle porzioni di memoria (residui liberi) di dimensioni non sfruttabili
singolarmente ma che raggruppate assieme potrebbero ospitare programmi
anche di grosse dimensioni. Per cercare di ridurre questo problema vengono
adottati degli algoritmi specifici che sono:
•
First Fit: assegnazione della prima partizione libera di dimensioni
tali da ospitare il programma;
•
Best Fit: assegnazione della più piccola partizione che possa
contenere il programma;
•
Worst Fit: assegnazione della partizione più grande tra tutte
quelle capaci di contenere il programma.
In questo caso il gestore della memoria deve usare due tabelle, una che
contiene le informazioni sulle partizioni allocate ed una che contiene le
informazioni sulle aree libere, così come mostrato nella figura seguente (lato
sinistro).
Nella figura sopra (lato destro) è possibile vedere un esempio di occupazione della
memoria con relativa tabella delle partizioni e tabella delle aree libere.
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 21 di 26
Allocazione non contigua
Si parla di allocazione contigua, quando il programma viene caricato in memoria
come un unico blocco, mentre si parla di allocazione non contigua, quando il
programma all’atto del caricamento in memoria viene suddiviso in più blocchi sparsi.
Le tecniche analizzate finora sono tutte basate sull’allocazione contigua, che però a
quanto abbiamo visto sembrano soffrire sempre del fatto che rimangono svariati
residui sparsi di memoria RAM che singolarmente non consentono il caricamento di
un programma da eseguire, ma che raggruppati assieme avrebbero una capienza
sufficiente allo scopo. Per rimediare a questo problema, si adottano tecniche basate
su allocazione non contigua.
La paginazione
La paginazione consiste nel suddividere logicamente il programma in pagine e la
memoria RAM in blocchi aventi la stessa dimensione delle pagine (in genere multipli
di 2K). In questo modo, le pagine in cui si suddivide il programma, che hanno
indirizzi contigui, vengono caricate in blocchi di memoria sparsi, cioè con indirizzi di
memoria non contigui, ovvero dove vi è la disponibilità. Per tenere traccia della
situazione, il gestore della memoria ha bisogno di due tabelle: la tabella delle
pagine e la tabella dei blocchi. La figura sotto, mostra un esempio di tale
organizzazione.
Con questa tecnica è necessario trasformare gli indirizzi relativi di variabili e
istruzioni contenuti nelle pagine in indirizzi assoluti, in funzione dell’indirizzo di
caricamento del blocco, tale operazione viene effettuata a RUNTIME, quindi questa
tecnica si basa su rilocazione dinamica e allocazione statica.
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 22 di 26
Grazie a questa tecnica il problema della frammentazione viene risolto
completamente, ma si presenta un altro problema, cioè quello di non poter caricare
in memoria un programma che ha bisogno di 5 pagine se ne abbiamo a disposizione
solamente 4. Vedremo tra poco che la memoria virtuale ci permette di superare
anche questa ulteriore limitazione.
La memoria virtuale
La memoria virtuale è una tecnica di gestione che consente di eseguire programmi le
cui dimensioni superano la memoria Ram effettivamente disponibile, grazie al fatto
che del programma da eseguire ne viene caricata in RAM solo una parte, lasciando la
parte restante su hard-disk, in modo tale da poter cominciare l’esecuzione. Nel
momento in cui serviranno le altre porzioni del programma, queste verranno
caricate in memoria secondo la necessità.
Con questa tecnica è possibile, per esempio, eseguire un programma di 1 Megabyte
avendo a disposizione solamente 100 Kilobytes di memoria. Teoricamente abbiamo
a disposizione una memoria infinita, ma solo virtualmente, non fisicamente.
Grazie alla memoria virtuale, si supera il limite della memoria fisica finita, si
aumenta notevolmente la multiprogrammazione con relativo migliore sfruttamento
delle risorse.
La memoria virtuale si basa su due principi di località:
1. Località temporale: le locazioni di memoria usate di recente è probabile che
verranno presto riutilizzate;
2. Località spaziale: se è stata indirizzata una locazione di memoria è probabile
che presto saranno indirizzate anche le locazioni ad essa adiacenti.
La gestione della memoria virtuale deve seguire tali criteri:
• si deve spezzettare un programma;
• si devono caricare in Ram solo alcuni pezzi del programma lasciando il resto
su memoria di massa;
• se durante l’esecuzione di un programma viene richiesta una pagina che non è
presente in memoria, si dovrà provvedere al caricamento con eventuale
rimozione di una pagina (algoritmi di rimozione).
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 23 di 26
Tecniche di gestione basate sulla memoria virtuale
Le tecniche di gestione della memoria virtuale sono:
1. gestione virtuale a richiesta di pagine;
2. gestione segmentata;
3. gestione segmentata-paginata.
Gestione virtuale a richiesta di pagine
Questa tecnica funziona come la paginazione illustrata precedentemente, solo che
non tutte le pagine del programma sono caricate in memoria in un certo istante, ma
vengono caricate a seconda della necessità, cioè se la prossima istruzione da
eseguire si trova in una pagina non presente in RAM, viene generato un interrupt
per mancanza di pagina (page fault) e viene richiesto al S.O. di provvedere al suo
caricamento dalla memoria di massa.
All’atto del caricamento in RAM di una pagina richiesta si possono verificare due
casi:
• 1° caso: in memoria centrale c’è un blocco libero che può ospitare la pagina
da caricare, in questo caso si procede al caricamento da memoria di massa a
memoria centrale (operazione di swap in) e si aggiornano le varie tabelle di
gestione;
• 2° caso: non ci sono blocchi liberi in memoria centrale. In questo caso il S.O.
deve scegliere quale pagina liberare tra quelle occupate per caricare quella
necessaria al programma in esecuzione. Per fare la scelta migliore il S.O.
ricorre ad un algoritmo di rimpiazzamento che può essere:
FIFO: viene rimpiazzata la pagina che per prima è entrata in memoria;
LRU (Last Recently Used): viene rimpiazzata la pagina che non viene
usata da più tempo;
NRU (Not Recently Used): viene rimpiazzata una pagina non utilizzata
di recente.
L’operazione di salvataggio su memoria di massa della pagina da liberare prende il
nome di swap out. Per evitare di salvare inutilmente una pagina su disco, si può
utilizzare un bit che segnala se la pagina in questione ha subito o meno modifiche, in
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 24 di 26
modo che qualora non ci siano state modifiche non sarà necessario fare l’operazione
di swap out, ma si potrà procedere direttamente con lo swap in.
Gli svantaggi della gestione virtuale a richiesta di pagine sono:
- tempi di accesso alla memoria raddoppiati;
- eccessiva occupazione della memoria da parte delle varie tabelle di gestione;
- difficile scelta della pagina da liberare senza che si verifichino troppi page
fault (fenomeno del trashing).
Il fenomeno del trashing può essere risolto adottando un algoritmo di
rimpiazzamento intelligente, mentre nel caso in cui fossero presenti in memoria
troppo poche pagine del processo in corso, il problema si potrebbe ripresentare, in
questi casi si prende in considerazione il modello detto working set, cioè l’insieme
delle pagine virtuali utilizzate correntemente dal processo in un certo istante.
Gestione segmentata
Nella tecnica memoria virtuale a gestione segmentata, il programma non viene più
suddiviso in pagine la cui dimensione dipende dai blocchi di memoria centrale, ma
viene suddiviso in porzioni dette segmenti, dove ogni segmento corrisponde per
esempio a un array, una tabella, una routine, ecc. In questo modo, vengono caricati
in memoria solo quei segmenti del programma necessari alla sua esecuzione.
Nella figura a fianco si vede un esempio
di programma composto da 5 segmenti:
tab1, tab2, main, proc1 e proc2.
Inizialmente per cominciare l’esecuzione
del programma basta caricare in
memoria il programma principale
(segmento main) e poi secondo le
necessità caricare gli ulteriori segmenti.
Gestione segmentata-paginata
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 25 di 26
Questa tecnica combina la segmentazione con la paginazione, nel senso che un
segmento invece di essere un unico blocco di memoria viene suddiviso in pagine di
dimensioni prefissate e la memoria è divisa in blocchi aventi la stessa dimensione
delle pagine. In questo modo la corrispondenza tra indirizzo logico e indirizzo fisico è
stabilita specificando il segmento, il numero di pagina ed il numero di byte nella
pagina. Con tale tecnica il S.O. deve gestire due eccezioni: segment fault (mancanza
del segmento in memoria) e page fault (mancanza della pagina in memoria).
La segmentazione-paginata è abbastanza efficiente e flessibile, consente una buona
protezione della memoria, ma ha una gestione più gravosa da parte del S.O., come
pure si ripresenta il problema della frammentazione.
Appunti sui Sistemi Operativi del Prof. Giammona - Aggiornati al 16 maggio 2014
Pagina 26 di 26