Algoritmi
Fondamentali
Nicola Di Mauro
[email protected]
2
Ordinamento
Disporre un gruppo di elementi secondo una prefissata
relazione d’ordine
Dipendente dal tipo di informazione
2 possibilità
Crescente
Decrescente
Altri criteri
Una delle attività di elaborazione più importanti
Numerica (ordinamento numerico)
Alfanumerica (ordinamento lessicografico)
Stima: 30% del tempo di calcolo di un elaboratore
Obiettivo: efficienza
Sfruttare “al meglio” i confronti ed i conseguenti spostamenti
degli elementi
Piazzare gli elementi prima possibile più vicino alla loro posizione
finale nella sequenza ordinata
3
Ordinamento
Possibilità di avere elementi costituiti da
più componenti
Associazione a ciascuno di una chiave
Identifica univocamente
Stabilisce la sua posizione
Unica componente rilevante per l’ordinamento
esempio: record / oggetti
Supponiamo, nel seguito, di richiedere un
ordinamento numerico crescente
elaborazione sulla sola chiave
4
Ordinamento
Gran varietà di algoritmi
Basati su confronti e scambi fra gli elementi
Relazione d’ordine, criterio
Non esiste uno migliore in assoluto
La bontà dipende da fattori connessi ai dati su cui
deve essere applicato
Dimensione dell’insieme di dati
Numerosità
Grado di pre-ordinamento dell’insieme di dati
Già ordinato, parzialmente, ordine opposto, casuale
5
Ordinamento
Algoritmi esterni
Usano un array di appoggio
Occupazione di memoria doppia
Necessità di copiare il risultato nell’array originale
Algoritmi interni
Eseguono l’ordinamento lavorando sullo
stesso array da ordinare
Basati su scambi di posizione degli elementi
6
Ordinamento Esterno
Enumerativo
Ciascun elemento confrontato con tutti gli altri
per determinare il numero degli elementi
dell’insieme che sono più piccoli in modo da
stabilire la sua posizione finale
Non verranno trattati nel seguito
7
Ordinamento Interno
Per Selezione
A bolle
Elemento più piccolo localizzato e separato dagli altri,
quindi selezione del successivo elemento più piccolo,
e così via
Coppie di elementi adiacenti fuori ordine scambiate,
finché non è più necessario effettuare alcuno scambio
Per Inserzione
Elementi considerati uno alla volta e inseriti al posto
che gli compete all’interno degli altri già ordinati
Ordinamento per Selezione
8
Minimi successivi
Trovare il più piccolo elemento dell’insieme e
porlo in prima posizione
Scambio con l’elemento in prima posizione
Trovare il più piccolo dei rimanenti (n – 1)
elementi e sistemarlo in seconda posizione
…
Finché si trovi e collochi il penultimo elemento
Ultimo sistemato automaticamente
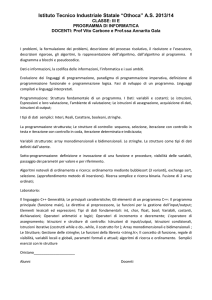
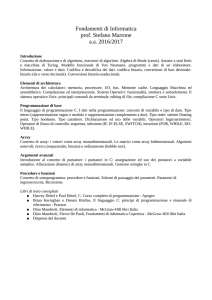
Ordinamento per 9
Selezione: Esempio
Inizio
I
II
III
IV
V
array(1)
44
44
11
11
11
11
array(2)
33
33
33
22
22
22
array(3)
66
66
66
66
33
33
array(4)
11
11
44
44
44
44
array(5)
55
55
55
55
55
55
array(6)
22
22
22
33
66
66
Ordinamento per 10
Selezione: Algoritmo
i←0
fintantoché i < n-1 esegui
trova il minimo di lista (i … n-1)
scambia la posizione del minimo con lista(i)
i←i+1
Algoritmi già noti
Ricerca del minimo
Scambio
Ordinamento per 11
Selezione: in Java
...
for (int i = 0; i<n-1; i++) {
min = a[i];
p = i;
for (int j = i+1; j<n; j++)
if (a[j] < min) {
min = a[j];
p = j;
}
a[p] = a[i];
a[i] = min;
}
...
Ordinamento per 12
Selezione: Complessità
Confronti
Sempre (n – 1) * n / 2 ~ O(n2)
n – 1 al I passo di scansione
n – 2 al II passo di scansione
…
1 all’(n – 1)-mo passo di scansione
Scambi
Al più (n – 1)
1 per ogni passo
Ordinamento per 13
Selezione: Considerazioni
Ogni ciclo scorre tutta la parte non
ordinata
Numero fisso di confronti
Non trae vantaggio dall’eventuale
preordinamento
Pochi scambi
Ordinamento a Bolle
Far “affiorare” ad ogni passo l’elemento più
piccolo fra quelli in esame
Confronto fra coppie di elementi adiacenti e,
se sono fuori ordine, scambio,
ripetendo il tutto fino ad ottenere la sequenza
ordinata
Simile alle bolle di gas in un bicchiere
Il passo di esecuzione coincide con:
Il numero di elementi già ordinati
Elemento a cui fermarsi ad ogni passo
14
Ordinamento a Bolle
Se in una passata non viene effettuato nessuno
scambio, l’insieme è già ordinato
L’algoritmo può già terminare
15
Meno di n – 1 passi
Miglioramento:
Usare un indicatore di scambi effettuati
Impostato a vero all’inizio di ogni passata
Impostato a falso non appena si effettua uno scambio
Si termina se alla fine di un passo è rimasto inalterato
Ordinamento a Bolle 16
Esempio
Inizio
I/1
I/2
I/3
I/4
II
array(1)
4
4
4
4
4
1
array(2)
3
3
3
3
1
4
array(3)
6
6
6
1
3
3
array(4)
1
1
1
6
6
6
array(5)
5
2
2
2
2
2
array(6)
2
5
5
5
5
5
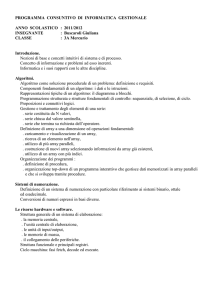
Ordinamento a Bolle 17
Esempio
II
II/1
II/2
II/3
III
array(1)
1
1
1
1
1
array(2)
4
4
4
4
2
array(3)
3
3
3
2
4
array(4)
6
6
2
3
3
array(5)
2
2
6
6
6
array(6)
5
5
5
5
5
Ordinamento a Bolle 18
Esempio
III
III/1
III/2
IV
IV/1
Fine
array(1)
1
1
1
1
1
1
array(2)
2
2
2
2
2
2
array(3)
4
4
4
3
3
3
array(4)
3
3
3
4
4
4
array(5)
6
5
5
5
5
5
array(6)
5
6
6
6
6
6
Ordinamento a Bolle 19
Algoritmo
passo ← 0
(* passo di esecuzione *)
ordinato ← falso
fintantoché passo < n e non ordinato esegui
passo ← passo + 1
ordinato ← vero
i←n
fintantoché i > passo esegui
se vettore(i) < vettore(i – 1) allora
scambia vettore(i) con vettore(i– 1)
ordinato ← falso
i←i–1
Ordinamento a Bolle 20
Codifica
. . .
p = 0;
ordinato = false;
while ((p < n) && !ordinato) {
p++;
ordinato = true;
for (int i = n-1; i >= p; i--)
if (a[i] < a[i-1]) {
t = a[i];
a[i] = a[i-1];
a[i-1] = t;
ordinato = false;
}
}
. . .
Ordinamento a Bolle 21
Complessità
Caso migliore (lista già ordinata): 1 passo
n – 1 confronti, 0 scambi
Caso peggiore (ordine opposto): n – 1 passi
All’i-mo passo
n – i + 1 confronti → in tutto (n – 1) * n / 2 ~ O(n2)
Come per Selezione
n – i + 1 scambi → in tutto (n – 1) * n / 2 ~ O(n2)
Molto maggiore della Selezione
Caso medio
Scambi pari alla metà dei confronti → O(n2)
Ordinamento a Bolle 22
Considerazioni
Ogni ciclo scorre tutta la parte non
ordinata
Prestazioni medie inferiori agli altri
metodi
Nel caso peggiore, numero di confronti uguale
all’ordinamento per selezione, ma numero di
scambi molto maggiore
Molto veloce per insiemi con alto grado di
preordinamento
Ordinamento per 23
Inserzione
Ricerca la giusta posizione d’ordine di ogni
elemento rispetto alla parte già ordinata
Inizialmente già ordinato solo il primo
elemento
Elementi da ordinare considerati uno per
volta
Necessari n – 1 passi
Metodo intuitivo
Simile all’ordinamento eseguito sulle carte da
gioco
Ordinamento per 24
Inserzione
Determinare la posizione in cui inserire la chiave
nella sequenza ordinata, facendo scalare le altre
Scansione sequenziale
Soluzione completa costruita inserendo un
elemento della parte non ordinata nella parte
ordinata, estendendola di un elemento
parte ordinata
≤x
|x|
| x | parte non ordinata
>x
parte non ordinata
→
Ordinamento per 25
Inserzione: Note
Strategia di scelta del prossimo elemento
da inserire nella parte ordinata
Primo elemento della parte non ordinata
Variante [da Dromey]
Inserire subito il più piccolo in prima
posizione
Evita di dover effettuare appositi controlli
sull’indice per evitare che esca fuori dall’array
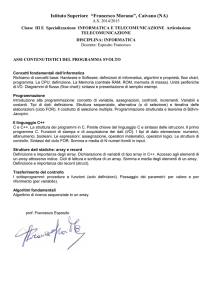
Ordinamento per 26
Inserzione: Esempio
Inizio
I
II
III
IV
V
array(1)
40
30
30
10
10
10
array(2)
30
40
40
30
30
20
array(3)
60
60
60
40
40
30
array(4)
10
10
10
60
50
40
array(5)
50
50
50
50
60
50
array(6)
20
20
20
20
20
60
Ordinamento per 27
Inserzione: Algoritmo
per ogni elemento dal secondo fino all’ultimo esegui
inserito ← falso
fintantoché non è stato inserito esegui
se è minore del precedente allora
fai scalare il precedente
se sei arrivato in prima posizione allora
piazzalo; inserito ← vero
fine-se (necessario per evitare ambiguità)
altrimenti
piazzalo; inserito ← vero
fine-se
fine-fintantoché
fine-perogni
Ordinamento per 28
Inserzione: Codifica Java
for (int i=1; i <= n-1; ++i) {
x = a[i];
j = i - 1;
inserito = false;
while (!inserito)
if (x < a[j]) {
a[j+1] = a[j];
j--;
if (j < 0) {
a[0] = x;
inserito = true;
}
} else {
a[j + 1] = x;
inserito = true;
}
}
Ordinamento per 29
Inserzione: Algoritmo
Cerca il minimo
Prima posizione ← minimo
Fintantoché c’è una parte non ordinata
Considera il primo elemento di tale parte
Confrontalo a ritroso con i precedenti, facendoli via via
scalare finché sono maggiori
Gli elementi via via incontrati scandendo a
ritroso la parte ordinata scalano per far
spazio all’elemento da inserire
Ordinamento per 30
Inserzione: in Java
. . .
min = a[0];
p = 0;
for (int i=1; i <= n-1; ++i)
if (a[i] < min) {
min = a[i];
p = i;
}
a[p] = a[0];
a[0] = min; // a[0] e a[1] ordinati
for (int i=2; i <= n-1; ++i) {
x = a[i];
j = i;
while (x < a[j-1]) { a[j] = a[j-1]; j--; }
a[j] = x;
}
. . .
Ordinamento per 31
Inserzione: Complessità
Sempre n – 1 passi
Uno scambio per ogni confronto, salvo
(eventualmente) l’ultimo
Caso ottimo (lista già ordinata)
n – 1 confronti, 0 scambi
Come il metodo a bolle
Caso pessimo (ordine opposto)
i-mo passo
i – 1 confronti e scambi -> (n – 1) * n / 2 ~
O(n2)
Caso medio: metà confronti e scambi
Ordinamento per 32
Inserzione: Considerazioni
Per sequenze con distribuzione casuale
Molti confronti
Molti scambi
Caso migliore come l’ordinamento a bolle
Valido per
Piccole sequenze (n ≤ 25)
Sequenze note a priori essere parzialmente ordinate
Ogni ciclo scorre una porzione della parte
ordinata
Ordinamento 33
Considerazioni
Scambio più costoso del confronto
Confronto operazione base del processore
Scambio composto da tre assegnamenti
Un assegnamento richiede due accessi alla memoria
Ad ogni passo
La porzione ordinata cresce di una unità
La porzione disordinata decresce di una unità
Ordinamento 34
Tecniche Avanzate
Si può dimostrare che, in media, per dati casuali,
gli elementi devono essere spostati di una
distanza pari a n/3 rispetto alla loro posizione
originaria
Gli algoritmi semplici tendono a spostare solo gli
elementi vicini e quindi necessitano di molti
spostamenti in più per ordinare la lista
Meno efficienza
Algoritmi migliori in grado di scambiare, nelle prime
fasi di ordinamento, valori che occupano posizioni
molto distanti nella lista
Ordinamento di Shell 35
(a diminuzione di incremento)
Si può ricavare vantaggio dai confronti
iniziali piazzando gli elementi più vicini
alla loro posizione finale
Muovere, inizialmente, elementi su lunghe
distanze
Sequenza finale ordinata raggiunta più velocemente
Ridurre progressivamente le distanze
Raffinamento dell’ordine degli elementi
36
Ordinamento di Shell
Scelta della distanza
Distanza massima possibile su n elementi: n/2
Possibilità che un elemento resti disaccoppiato
Primo con l’(n/2 + 1)-mo
Secondo con l’(n/2 + 2)-mo
…
Scelta della riduzione di distanza
Dimezzamento progressivo
Numero logaritmico di riduzioni
n/2; (n/2)/2 = n/4; n/8; n/16; …; n/2log2n
Ordinamento di Shell 37
Esempio
n=8
| 20 | 35 | 18 | 8 | 14 | 41 | 3 | 39 |
Distanza n/2 = 4
4 catene da 2 elementi
| 14 | 35 | 3 | 8 | 20 | 41 | 18 | 39 |
Distanza n/4 = 2
2 catene da 4 elementi
| 3 | 8 | 14 | 35 | 18 | 39 | 20 | 41 |
Distanza n/8 = 1
1 catena da 8 elementi
| 3 | 8 | 14 | 18 | 20 | 35 | 39 | 41 |
38
Ordinamento di Shell
Scelta di un algoritmo per ordinare le
catene
Disordine nella lista relativo
Algoritmo efficiente per strutture parzialmente
ordinate
Catene corte
Algoritmo efficiente per piccoli insiemi di valori
Metodi candidati
A bolle
Per inserzione
Meno scambi
39
Ordinamento di Shell
Realizzazione del meccanismo per
diminuire le distanze
inc ← n
fintantoché inc > 1
inc ← inc / 2
Ordina le catene con incremento inc per inserzione
40
Ordinamento di Shell
Numero di catene da ordinare per ogni
definito incremento
Pari all’incremento
inc ← n
fintantoché inc > 1
inc ← inc / 2
per j che varia da 1 a inc
Ordina la j-ma catena con incremento inc per inserzione
41
Ordinamento di Shell
Accesso ad ogni singola catena per applicare
l’ordinamento
Nell’ordinamento per inserzione si inizia
considerando il secondo elemento
Elementi successivi a distanza inc (invece che 1)
Posizione del primo elemento di ogni catena: j
Posizione del secondo elemento di ogni catena: j + inc
posizione ← posizione precedente + inc
Fino a quando la posizione non supera la dimensione
dell’array (n)
k>n
42
Ordinamento di Shell
inc ← n
fintantoché inc > 1
inc ← inc / 2
per j che varia da 1 a inc
k ← j + inc
fintantoché k ≤ n
x ← a(k)
Trova la posizione corrente per x
a(corrente) ← x
k ← k + inc
43
Ordinamento di Shell
Individuazione della posizione corretta per
inserire l’elemento x via via considerato
Inizialmente x è in posizione k nella lista
Il primo elemento da confrontare con x è nella
posizione precedente (distanza inc invece che 1)
corrente ← k
precedente ← corrente – incremento
Scorrere in seguito gli altri elementi nella catena
corrente ← precedente
precedente ← precedente – incremento
fintantoché x < a(precedente) esegui …
44
Ordinamento di Shell
Necessità di un metodo per garantire la
terminazione
Nell’ordinamento per inserzione esisteva una
sentinella
Minimo in prima posizione
Metodo basato solo sugli indici
Se precedente è ripetutamente decrementato di inc
potrà finire sotto j che segna l’inizio della catena
corrente
Accertarsi che precedente ≥ j
45
Ordinamento di Shell
fintantoché (precedente ≥ j) e (x < a(precedente)) esegui
…
Problemi con l’implementazione
Valutazione della condizione di ciclo non
cortocircuitata
Non si ferma appena è trovata falsa la prima condizione
Necessità di definire un indicatore che ricordi se
x < a(precedente) è vero o falso
while (precedente ≥ j) and (not inserito) do …
Ordinamento di Shell 46
Algoritmo
Definire il vettore di n elementi
Inizializzare l’incremento inc a n
Fintantoché l’incremento è maggiore di 1
Dimezza l’incremento
Per ciascuna delle inc catene a intervalli inc da ordinare
Individua il secondo elemento della catena
Fintantoché non è raggiunta la fine della catena
Usa il meccanismo di inserzione per l’elemento corrente
Passa all’elemento successivo a distanza inc
Ordinamento di Shell 47
Programma Java
inc = n;
while (inc > 1) {
inc = inc / 2;
for (int j = 0 ; j < inc; ++j) {
k = j + inc; // indice successivo nella catena
while (k < n) {
inserito = false;
x = a[k];
corr = k; prec = corr-inc;
while ((prec >= j) && !inserito ) {
if (x < a[prec]) {
a[corr] = a[prec];
corr = prec; prec = prec-inc;
}
else inserito = true;
} // while ((prec >= j) && !inserito )
a[corr] = x;
k = k + inc;
} // while (k < n)
} // for
} // while (inc > 1)
48
Ordinamento di Shell
| 20 | 35 | 18 |
Risultato finale:
Penultimo passo:
n=7
3 |
| 3 | 8 | 14 | 18 | 20 | 35 | 41 |
| 8 | 14 | 18 | 20 | 35 | 41 | 3 |
Per arrivarci con Shell:
8 | 14 | 41 |
3 confronti, 2 scambi
1 solo passo: n/2 = 3 catene di lunghezza 2
Al passo successivo: n/4 = 1 catena pari a tutto l’array
Per arrivarci per inserzione: 11 confronti, 8 scambi
| 20 | 35 | 18 | 8 | 14 | 41 | 3 | → 1 confronto,
0 scambi
| 20 | 35 | 18 | 8 | 14 | 41 | 3 | → 2 confronti,
2 scambi
| 18 | 20 | 35 | 8 | 14 | 41 | 3 | → 3 confronti,
3 scambi
| 8 | 18 | 20 | 35 | 14 | 41 | 3 | → 4 confronti,
3 scambi
| 8 | 14 | 18 | 20 | 35 | 41 | 3 | → 1 confronto,
0 scambi
Ordinamento di Shell 49
Considerazioni
Numero di passi esterni logaritmico
L’ultimo passo coincide con il normale
ordinamento per inserzione/selezione
Numero di volte che si può continuare a dimezzare n
Vantaggio del preordinamento risultante superiore
alla perdita per le ripetizioni dell’ordinamento
Scelte migliori per la sequenza di decrementi
2p–1, …, 31, 15, 7, 3, 1
Numero di confronti e scambi proporzionale a n1.2
50
Partizionamento
Dato un array non ordinato di n elementi,
e un valore x dello stesso tipo degli
elementi, partizionare gli elementi in due
sottoinsiemi tali che
Gli elementi ≤ x siano in un sottoinsieme
Gli elementi > x siano nell’altro sottoinsieme
Esempio
| 4 | 13 | 28 | 18 | 7 | 36 | 11 | 24 |
x = 20
51
Partizionamento
Si potrebbe ordinare l’array e trovare l’indice
dell’elemento che separa i due sottoinsiemi
| 4 | 7 | 11 | 13 | 18 | 24 | 28 | 36 |
≤ 20
> 20
Non richiesto
Non necessario
Il problema sarebbe risolto anche con la
seguente configurazione finale
| 4 | 13 | 11 | 18 | 7 | 36 | 28 | 24 |
≤ 20
> 20
52
Partizionamento
Nota la posizione finale p che divide i due
sottoinsiemi
Alcuni elementi non vanno spostati
Alcuni elementi sono fuori posto
Scorrendo l’array da sinistra verso p, i valori ≤ x
Scorrendo l’array da destra verso p, i valori > x
Per ognuno da una parte, uno dall’altra
Scambio
La posizione p può essere ricavata
Contare gli elementi ≤ x
53
Partizionamento
Occorrono 2 scansioni dell’array
Determinazione della posizione p
Individuazione e scambio degli elementi fuori posto
Si termina quando si arriva a p
È possibile scandire l’array una sola volta
Mentre le due partizioni non si incontrano
Estendere le partizioni sinistra e destra scambiando le coppie
piazzate male
La posizione p sarà individuata automaticamente al
termine
54
Partizionamento
Scansione effettuata tramite 2 indici
i per la partizione sinistra
Parte da 1
Incrementato
j per la partizione destra
Parte da n
Decrementato
Partizionamento 55
Algoritmo
Individuazione dei primi valori fuori posto
Mentre l’i-mo elemento è ≤ x e i < j
Mentre il j-mo elemento è > x e i < j
Decrementare j
Mentre le partizioni non si sono incontrate
Incrementare i
Scambiare i valori nelle posizioni individuate
Cercare i successivi valori fuori posto
Al termine, j è la posizione p
Limite inferiore per i valori > x nella partizione
Partizionamento 56
Note Implementative
Gestione del caso in cui x è fuori
dall’intervallo dei valori assunti dall’array
Inserire un controllo supplementare dopo i
cicli preliminari
se il j-mo elemento è > x allora decrementa j
Ciò assicura che ∀k ∈ [1..j]: a[k] ≤ x
Se x è maggiore di tutti gli elementi dell’array,
al termine dei cicli si ha i = j = n e il controllo
non scatta
Se x è minore di tutti gli elementi dell’array,
al termine dei cicli si ha i = j = 1 e, dopo il
controllo, j = 0
Partizionamento 57
Codice Java
int partiziona(Tipo[] a, int p1, int p2, Tipo x)
i = p1; j = p2;
while ((i < j) && (a[i] <= x)) i++;
while ((i < j) && (a[j] > x)) j--;
if (a[j] > x) j--;
while (i < j) {
t = a[i];
a[i] = a[j];
a[j] = t;
i++; j--;
while (a[i] <= x) i++;
while (a[j] > x) j--;
}
return j;
}
58
Fusione
Fondere due array, già ordinati secondo il
medesimo criterio, in un unico array
ordinato secondo lo stesso criterio
2 | 5 | 9 | 13 | 24
3 | 4 | 11 | 15 | 22
2 | 3 | 4 | 5 | 9 | 11 | 13 | 15 | 22 | 24
Numero di elementi dell’array risultante pari
alla somma degli elementi dei due array dati
Necessità di esaminare tutti gli elementi dei
due array dati
59
Fusione
I due array possono considerarsi come
costituiti da sottosequenze da concatenare
opportunamente nell’array finale
Suddividere ciascuno dei due array dati in una
parte già fusa e una ancora da fondere
In ogni istante, esaminare il primo elemento della
parte da fondere dei due array
Inserire il minore nella prima posizione
dell’array fuso
Avanzare al prossimo elemento dell’array da cui
è stato preso
60
Fusione
Uno dei due array finirà per primo
Copiare fino ad esaurimento i suoi elementi
restanti nell’array finale
Individuabile dall’inizio confrontando gli
ultimi elementi dei due array
Se l’ultimo elemento di un array è minore del primo
elemento dell’altro, la fusione si riduce alla
copiatura degli elementi dell’uno seguita dalla
copiatura degli elementi dell’altro
Fusione 61
Algoritmo
Mentre non è terminato il numero di elementi da
considerare in nessuno degli array:
Confronta i loro primi elementi degli array da fondere e
metti il più piccolo nell’array finale
Aggiorna l’indice dell’array appropriato
Se è finito il primo array, allora
Copia il resto del secondo nell’array finale
Altrimenti
Copia il resto del primo nell’array finale
Fusione 62
Modularizzazione
algoritmo merge
algoritmo mergecopy
Fonde l’array che finisce prima con l’altro
algoritmo shortmerge
Decide quale array finisce prima, quindi esegue la
fusione di conseguenza
Fonde le parti degli array ricadenti nello stesso
intervallo
algoritmo copy
Copia gli elementi di un array dalla posizione attuale
fino alla fine
Fusione 63
Algoritmo merge
Definire gli array a[1..m] e b[1..n]
Se l’ultimo elemento di a è ≤ all’ultimo elemento
di b allora
Altrimenti
Fondi tutto a con b
Copia il resto di b
Fondi tutto b con a
Copia il resto di a
Dà il risultato c[1..n+m]
Fusione 64
Algoritmo mergecopy
Definire gli array a[1..m] e b[1..n]
con a[m] ≤ b[n]
Se l’ultimo elemento di a risulta ≤ rispetto al
primo elemento di b allora
Copia tutto a nei primi m elementi di c
Copia tutto b in c, partendo dalla posizione m+1
Altrimenti
Fondi tutto a con b in c
Copia il resto di b in c partendo dalla posizione in cui
è finita la fusione
Fusione 65
Algoritmo shortmerge
Definire gli array a[1..m] e b[1..n]
con a[m] ≤ b[n]
Mentre tutto a non è ancora fuso esegui
Se il corrente a ≤ b allora
Altrimenti
Copia il corrente a nella corrente posizione di c
Avanza l’indice di a
Copia il corrente b nella corrente posizione di c
Avanza l’indice di b
Avanza l’indice di c
Fusione 66
Algoritmo copy
Definire gli array b[1..n] e c[1..n+m] e
definire dove cominciare
in b (al corrente j) e
in c (al corrente k)
Mentre non è ancora finito b esegui
Copia l’elemento dalla corrente posizione in b
nella corrente posizione in c
Avanza l’indice j di b
Avanza l’indice k di c
67
Ordinamento per Fusione
Algoritmo di MergeSort
L’idea alla base è che l’ordinamento di una lista di n
elementi può essere ottenuto
Dividendo la lista in due sequenze di n/2 elementi ciascuna
Dimensione inferiore (dimezzata)
Ordinando singolarmente ogni sequenza
Problema di ordine inferiore
Risolubile secondo la stessa tecnica
Procedura ricorsiva
Fondendo le due metà ordinate in un’unica sequenza
Lista risultante ordinata
Ordinamento per Fusione 68
Esempio
Insieme iniziale
| 33 | 21 | 7 | 48 | 28 | 13 | 65 | 17 |
Suddivisione in 2 sottoinsiemi
| 33 | 21 | 7 | 48 |
| 28 | 13 | 65 | 17 |
Ordinamento di ogni singolo sottoinsieme
| 7 | 21 | 33 | 48 |
| 13 | 17 | 28 | 65 |
Combinazione (fusione) dei sottoinsiemi ordinati
| 7 | 13 | 17 | 21 | 28 | 33 | 48 | 65 |
Ordinamento per Fusione 69
Esempio
85 24 63 45
17
31 96 50
decomposizioni
85 24 63 45
ordinamenti
(semplici)
fusioni
17
31 96 50
85 24
63 45
17
31
96 50
24 85
45 63
17
31
50 96
24 45 63 85
17
24
31
17
31 50 96
45 50 63 85 96
70
Ordinamento per Fusione
void ordinamentoPerFusione(int[] a) {
n = a.length;
int[] b = new int[n] = {. . .};
mergesort(a, 0, n-1)
}
void mergeSort(int[] a, int p1, int p2){
if (p1 < p2) {
int q = (p1 + p2) / 2;
mergeSort(a, p1, q);
mergeSort(a, q+1, p2);
merge(a, p1, q, p2)
}
}
Ordinamento per Fusione 71
Merge
La procedura di fusione deve lavorare su
segmenti diversi di uno stesso vettore
Non può essere la stessa definita per la fusione
di due vettori distinti
Occorre definire una nuova procedura che
fonda segmenti adiacenti di uno stesso
vettore
Ordinamento per Fusione 72
merge()
public static void merge
(int[] a, int from,
int mid, int to) {
int n = to - from + 1;
int[] b = new int[n];
int i = from;
int k = mid + 1;
int j = 0;
while (i<=mid && k<=to) {
if (a[i] < a[k])
{ b[j] = a[i]; i++;}
else
{ b[j] = a[k]; k++;}
j++;
}
while (i <= mid) {
b[j] = a[i];
i++;
j++;
}
while (k <= to) {
b[j] = a[k];
k++;
j++;
}
for (j = 0; j < n; j++)
a[from + j] = b[j];
}
Ordinamento per Fusione 73
Considerazioni
un certo numero di livelli di decomposizioni e
fusioni
in ciascun livello vengono fusi tutti gli elementi
il costo asintotico di ciascun livello di fusioni è N
il numero di livelli è log2 N
TmergeSort(N) = N log2 N
74
Quicksort [Hoare]
Detto anche ordinamento per
partizionamento-scambio
Basato sull’idea che nei primi passi di
ordinamento la distanza fra i dati da muovere
deve essere grande
Analogamente all’ordinamento di Shell
2 versioni
Iterativa
Ricorsiva
75
Quicksort & Shellsort
L’ordinamento di Shell confronta al primo passo
elementi a distanza n/2
Equità nelle distanze di confronto fra i vari elementi
Distanza massima riferita al singolo elemento
Primo con l’ultimo
Secondo col penultimo
…
Quicksort 76
Partizionamento
Poco beneficio
Alcuni confronti non generano scambi
Al più n/2 scambi
Ogni scambio sistema al più una coppia
Andrebbe bene se l’array avesse un ordine inverso
Meglio un metodo di partizionamento
elementi più piccoli | elementi più grandi
Aumenta il preordinamento
Riduce la dimensione del problema
Ogni partizione può essere affrontata separatamente
Quicksort 77
Scelta Valore Centrale
Il partizionamento richiede un valore in
base al quale distinguere gli elementi
Scelto a caso
Potrebbe essere esterno ai valori della lista
Prenderne uno della lista stessa
Indifferente quale
Elemento mediano
Elemento in posizione media
Posizione media
Limite inferiore + limite superiore DIV 2
Quicksort 78
Dopo il Partizionamento
Situazione:
Parte sinistra
Parte destra
Elementi minori dell’elemento mediano
Elementi maggiori dell’elemento mediano
Escluse interazioni fra partizioni
Nessun elemento della parte sinistra potrà mai,
nell’ordinamento, finire nella parte destra
Ciascuna può essere trattata (ordinata) separatamente
Ciascuna contiene meno elementi della lista completa
Quicksort 79
Ciclo
Per ciascuna delle 2 partizioni ottenute valgono
le stesse considerazioni precedenti
Riapplichiamo su ciascuna i concetti già esposti
Problemi analoghi a quello iniziale (ordinamento)
Dimensione minore
Si ottengono, per ciascuna, altre 2 partizioni
Situazione dopo un certo numero di passi:
elementi I partizione < elementi II partizione <
… < elementi n-ma partizione
Criterio di stop: partizioni di un solo elemento
Non ulteriormente partizionabili
Già ordinate
Quicksort 80
Algoritmo di Base
Mentre tutte le partizioni non risultano
ancora ridotte a dimensione 1 esegui
Scegli la prossima partizione da elaborare
Individua un nuovo valore di partizionamento
per la partizione scelta (il mediano)
Partiziona la partizione attuale in due insiemi
più piccoli parzialmente ordinati rispetto al
mediano attuale
Quicksort 81
Iterativo
Ogni passo genera 2 nuove partizioni
Si può agire su una sola partizione alla volta
Una si elabora
L’elaborazione dell’altra resta in sospeso
Possibile esistenza, in un certo momento, di partizioni
create in attesa di elaborazione
Necessità di ricordarne i limiti destro e sinistro
Dove iniziano
Dove finiscono
Salvare l’informazione sui limiti di ciascuna
Riferita alle posizioni (indice) dell’array originale
Quicksort 82
Ricordare i Compiti Futuri
Memorizzazione dei limiti delle partizioni
lasciate in sospeso
Ogni partizione richiede la memorizzazione di
2 valori che la individuano (gli estremi)
Immagazzinati in un array di appoggio
Relativi agli indici dell’array di partenza
2 elementi dell’array di appoggio per ogni
partizione
Scelta della prossima
Simulazione di una struttura a pila
Last In, First Out
Quicksort 83
Fabbisogno di Memoria
Man mano che il partizionamento prosegue
Il numero delle partizioni di cui salvare l’informazione
sui limiti aumenta (di 1)
Le partizioni diventano sempre più piccole
Dimensione dell’array di servizio
Caso peggiore: 2(n–1) elementi
Si memorizzano n – 1 partizioni lasciate in sospeso
Ogni volta si elabora la partizione più grande
Ogni volta la partizione più piccola contiene un solo
elemento
| partizione da elaborare per prima | x |
Ciascuna richiede 2 elementi
Troppo Spazio!
Quicksort 84
Ottimizzazione
Elaborare per prima la partizione più
piccola
Minor numero di partizioni da tenere in
sospeso
Partizioni di dimensione 1 non generano altre
partizioni
Individuate e scartate subito dall’elaborazione
In ogni istante esiste una sola partizione in sospeso
di cui vanno salvati i limiti (la più grande)
Quicksort 85
Ottimizzazione/2
Ad ogni passo si elabora la più grande
delle partizioni più piccole
Nel precedente caso peggiore: 2 elementi
Nuovo caso peggiore: 2 log2 n
Partizioni divise sempre a metà
Dimensione dimezzata
Accettabile
Quicksort 86
Salvataggio Limiti con Pila
Test per decidere qual è la partizione più grande
Se le partizioni cadono a sinistra del medio
Altrimenti
Elabora la partizione sinistra (che è la più grande)
Salva i limiti di quella destra
Elabora la partizione destra (che è la più grande)
Salva i limiti di quella sinistra
La partizione più grande è sempre messa in
attesa di elaborazione
Gestione a pila
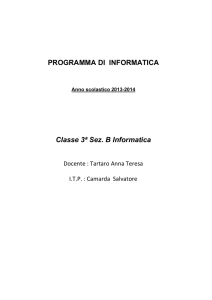
Quicksort 87
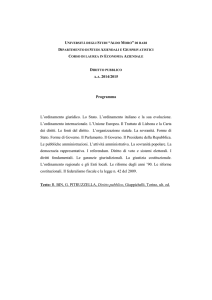
Partizionamento e Accodamento
1
a
2
a
|
e f
|
cd
|
c
3
b
a..c < d..b
f..c < a..e
| ||
f ghc
f..g < h..c
Top dello stack
Vettori di servizio
d .. b
1
a .. e
d .. b
2
h
a
d
3
..
..
..
c
e
b
Quicksort 88
Fine Ciclo
Quando si raggiunge una partizione di
dimensione 1 si ricomincia il processo di
partizionamento sulla partizione più
recentemente memorizzata
Limiti della partizione rimossi dalla cima della pila
Quando tutte le partizioni sono state ridotte a
dimensione 1 non ci saranno più limiti nella pila
Pila vuota
Terminazione del processo di partizionamento
Quicksort 89
Algoritmo
Acquisire l’array a[1..n] da ordinare
Inizializzare il puntatore al top dello stack al valore 2
Impostare i limiti sup e inf dell’array nello stack a 1..n
(si inizia con una sola partizione coincidente con l’intero array)
Mentre lo stack non è vuoto esegui
Estrai dal top dello stack la prossima partizione
(limiti sup e inf del segmento di array corrispondente)
Mentre il corrente segmento non è ridotto a dimensione 1 esegui
Scegli l’elemento mediano del segmento di array
Partiziona il segmento in 2 rispetto al suo valore mediano
Salva nello stack i limiti della partizione più grande
Segmento corrente ← partizione più piccola
Quicksort 90
Codice Java
top = 0;
stack[top++] = 0; stack[top] = n - 1;
while (top > 0) {
right = stack[top--]; left = stack[top--];
while (left < right) {
medio = (left + right) / 2;
mediano = a[medio];
pos = partiziona(a,left,right,mediano);
if (pos < medio) { // salva dx e lavora su sx
stack[++top] = pos+1;
stack[++top] = right;
right = pos; // nuovo inizio sx
} else { // salva sx e lavora sulla dx
stack[++top] = left;
stack[++top] = pos;
left = pos+1; // nuovo inizio dx
}
} // while (left < right)
}
Quicksort 91
Versione Ricorsiva
Algoritmo per sua natura ricorsivo
Implementazione ricorsiva molto semplice:
Strategia basata sull’applicazione dello stesso
processo a problemi via via più piccoli
Divide l’insieme di dati in 2 partizioni in modo tale che tutti
gli elementi della partizione sinistra (prime pos posizioni)
siano ≤ a tutti gli elementi della parte destra (posizioni da
pos+1 fino ad n)
Riapplica lo stesso meccanismo di partizionamento ad
entrambe le partizioni (che sono di dimensioni via via più
piccole) a[1..pos] e a[pos+1..n] fino ad ottenere segmenti di
dimensione 1
A questo punto l’array sarà completamente ordinato
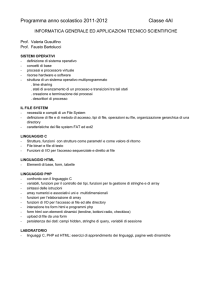
Quicksort 92
Ricorsivo
Situazione iniziale:
dati originali
inf = 1
sup = n
Dopo il primo partizionamento:
partizione sinistra
inf
|
pos
partizione destra
sup
Passi fondamentali dell’algoritmo ricorsivo
Se nell’insieme corrente c’è più di 1 elemento
Partiziona i dati in partizione sinistra e destra
Ripeti il processo di partizionamento per la partizione
sinistra
Ripeti il processo di partizionamento per la partizione destra
Quicksort 93
Ricorsivo/2
Indicatori di indice necessari:
inf
|
pos
sup
partition(a, inf, sup, mediano, pos)
Ricorsione
quicksort2(a, inf, pos)
quicksort2(a, pos+1, sup)
Terminazione della ricorsione
Chiamata ad un segmento di 1 unico elemento
Test: se inf < sup allora continua
Quicksort 94
Algoritmo Ricorsivo
Se il segmento corrente da ordinare contiene più di 1 elemento allora
Partizionalo in 2 segmenti più piccoli tali che tutti gli elementi del
segmento di sinistra siano ≤ di tutti gli elementi del segmento di
destra
Se il segmento di sinistra è più piccolo del segmento di destra
allora
Quicksort il segmento di sinistra
Quicksort il segmento di destra
Altrimenti
Quicksort il segmento di destra
Quicksort il segmento di sinistra
Quicksort 95
Metodo Java
void quicksort2(double[] a, int inf, int sup) {
int medio = -1;
double mediano;
if (inf < sup) {
medio = (inf + sup) / 2;
mediano = a[medio];
partition(a, inf, sup, mediano, medio);
if ((medio – inf) < (sup – medio-1)) {
quicksort2(a, inf, medio);
quicksort2(a, medio+1, sup);
}
else {
quicksort2(a, medio+1, sup);
quicksort2(a, inf, medio);
}
} // if (inf < sup)
}
Quicksort 96
Considerazioni
Suddivisione successiva delle partizioni
Struttura risultante ad albero binario
Caso peggiore: suddivisione a metà
Profondità dell’albero: log2 n
Numero di volte che si può spaccare
successivamente a metà una lista di n elementi
Ciascun livello dell’albero contiene n elementi
Complessità: n log2 n
Algoritmo ottimo!