Ponchione Marco,Pedico Domenico,Ferrero Gianluca,Vitale Steven,Di Vincenzo Alfonso
Classe 5°B
RELAZIONE TDP
OGGETTO:
1- Realizzare un circuito per la simulazione del funzionamento di un tergicristallo munito con
sensore di pioggia e due velocità. Il circuito deve essere munito di un motorino passo-passo
per riprodurne il movimento e di una serie di LED per simularne anch’essi il movimento.
2- Realizzare un impianto elettrico per le prese di corrente, un impianto elettronico per creare
una rete LAN e una connessione ad internet, un impianto audio all'interno del pullman del
progetto Mythos 2006.
ORGANIZZAZIONE E DIVISIONE DEL LAVORO:
In entrambi i progetti ci siamo divisi il lavoro, alcuni di noi si sono occupati della parte riguardante
il tergicristallo mentre altri si sono occupati dell’impianto prese e audio del pullman.
Il progetto del tergicristallo è iniziato quando il professor Catalano ci ha dato direttive per la
costruzione del circuito che è stato studiato attentamente e modificato secondo le nostre esigenze di
progetto.
Il progetto dell’impianto prese e audio invece è stato fornito dal professor Guastella, che in base ad
alcuni disegni prodotti dalle altre scuole aderenti anch’esse al progetto Mytos 2006, ci ha mostrato
come dovevano essere sistemati i vari elementi dell’impianto.
IL PROGETTO DEL TERGICRISTALLO:
Questo progetto è stato compiuto da cinque membri del gruppo alcuni dei quali hanno però
interagito con il secondo progetto; il progetto del tergicristallo è costituito da un circuito
comprendente diversi componenti tra cui il microcontrollore PIC16F628 che è l’elemento
principale.
Il PIC 16F628 è un componente che ha lo stesso formato e la stessa piedinatura (e circa lo stesso
costo 4-5 euro) del PIC 16F84, dispone però d’alcune funzioni aggiuntive di alto livello. Può essere
programmato esattamente con le stesse modalità del PIC 16F84.
Caratteristiche:
16 IN/OUT Pin
Ogni uscita gestisce 25mA
Clock Max 20MHz
2048 istruzioni di programma
224 Byte RAM
128 byte EEPROM
alimentazione 3-5,5V
2 Timer a 8 bit
1 Timer a 16 bit
Set d’istruzioni di 36 codici mnemonici in codice assembly
2 Comparatori analogici e uscita per tensione di riferimento
Funzione Capture per la misura precisa d’intervalli di tempo
Funzione Compare per comparare due conteggi
Uscita in PWM con risoluzione sino a 10bit
Modulo USART (Universal Synchronous/Asynchronous Receiver Transmitter) per gestire
facilmente comunicazioni seriali
Funzioni aggiuntive:
Questo PIC consente una programmazione a bassa tensione con soli segnali 0÷5 V senza la
necessità del livello di programmazione a +12V (questa modalità è attivata tramite un apposito bit
della parola di configurazione).
Piedinatura:
I comandi principali del PIC
RA0-RA7 sono le linee della porta A configurabili separatamente come IN o OUT.
RB0-RB7 sono le linee della porta B configurabili separatamente come IN o OUT.
MCLR è il master reset utile per resettare il PIC a livello hardware (normalmente a livello +Vcc, si
porta a livello 0 per il reset).
Vss alimentazione positiva da 3 a 5,5 volt.
Vdd massa.
OSC1 e OSC2 pin utilizzati per il clock tramite quarzo oppure con rete RC, CLKIN può essere
usato per inviare un clock esterno.
RB6 e RB7 sono usati in programmazione rispettivamente come DATA e come CLOCK
AN0÷AN3 ingresso comparatori analogici
Vref Uscita per tensione di riferimento generata internamente
CMP1, CMP2 uscita per i due comparatori di tensione
INT ingresso per interrupt esterno
Il Clock interno
Il PIC 16F628 dispone di un generatore di clock interno configurabile. Impostando con Ic-Prog
Oscillator su IntRC/IO viene selezionato come clock di sistema il generatore interno preimpostato
sul valore 4 MHz (bit0,1,4 della Configuration word). E' possibile agendo sul bit3 (R/W-1) del
registro PCON selezionare il valore di 37KHz al posto di 4MHz. Impostando con Ic-Prog Oscillator
su ER I/O viene selezionato come clock di sistema il generatore interno, programmabile con una
sola resistenza esterna, si possono ottenere tutte le frequenze tra 200KHz e 10MHz.
Queste modalità ovviamente permettono di liberare i due pin (non vengono utilizzati il quarzo e i
due condensatori ceramici) relativi al clock e di poterli usare con funzioni di I/O. Per maggiori
dettagli si rinvia ai DataSheets.
Questo componente ci è stato fornito dal professor Catalano il quale ci ha illustrato alcune
caratteristiche su di esso con un corso pomeridiano con il quale abbiamo imparato alcune basi di
programmazione e piedinatura del componente.
Programmazione del PIC:
Allegato alla seguente relazione c’è il testo della programmazione del nostro integrato che verrà ora
descritta:
Il nostro motore per poter girare e compiere l’arco ha bisogno di una sequenza che è la seguente:
0101
0110
1010
1001
Il principio di funzionamento del motore è che quando un led si accende il motorino lo raggiunge
compiendo il movimento.
Parlando del programma scritto notiamo inizialmente la descrizione e la visualizzazione delle
variabili del programma come il fine corsa ( F_cors ), il sensore di pioggia ( S_piog ), il tasto per le
due velocità ( No_vel ) e l’interruttore di accensione e spegnimento manuale ( Off_on ), tutti con le
porte del PIC a cui sono riferiti.
Scendendo con il programma troviamo le costanti che sono il tergicristallo e il motorino passopasso con i relativi codici di accensione per quanto riguarda i LED e alcuni codici in codice
esadecimale che rappresentano il ciclo del motore.
Sotto le costanti troviamo tutta una descrizione con l’inizializzazione di alcuni comandi interni al
PIC che sono adibiti alla gestione del ritardo;questa parte del programma si trova automaticamente
nei software per la realizzazione di questo genere di operazioni e non è perciò stato progettato da
noi.
Successivamente notiamo l’inizio vero e proprio del programma con l’inizializzazione di due
variabili chiamate per l’occorrenza i e j; poi abbiamo la variabile CMCON uguagliata a zero la cui
funzione è quella di permettere al PIC 16F628 il funzionamento degli ingressi in digitale.
I comandi TRISA e TRISB servono per controllare le porte A e B del PIC. Subito dopo inizia un
ciclo che si nota per la presenza del comando while all’interno del quale la funzione principale è il
controllo della posizione del motorino passo-passo e in caso contrario il movimento per riportarlo
nella posizione iniziale. Il secondo ciclo è anch’esso iniziato dalla funzione while e serve per
controllare la posizione del tasto di ON\OFF o del sensore di pioggia che se è attivo il tasto o
bagnato il sensore il circuito parte e inizia il suo ciclo.
Successivamente troviamo due cicli for utilizzati per l’andata e il ritorno del motorino, nei quali
viene controllata la velocità.
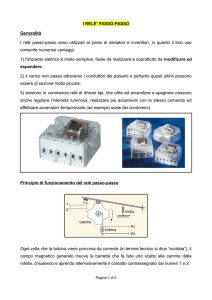
Un altro elemento importante è l’ULN2803 il quale è un controllore per le uscite del motorino
passo-passo.
L'ULN2803 è un integrato i cui primi 8 pin ricevono in input una tensione di 5v proveniente da un
circuito di tecnologia CMOS o TTL, i pin dal 11 al 18 portano in uscita una tensione di 12V adatta
per i motori passo-passo. I piedini 9 e 10 sono rispettivamente la massa e l'alimentazione a 12v.
Questo integrato è in pratica un'interfaccia tra il motore passo-passo che lavora con 12V ed una
logica di pilotaggio che invece lavora con 5v. Può essere utilizzato per pilotare due motori passopasso dato che ogni motore ha 4 fasi.
Schema ULN2803
Il Motorino Passo-Passo lo utilizziamo per riprodurre fisicamente il movimento del tergicristallo
montandolo su un pezzo di plexiglas opportunamente realizzato per imitare il parabrezza di un’auto.
I motori passo-passo sono dei motori elettrici che permettono all'utente di definire l'angolo di
rotazione con una buona precisione ed invertire con estrema semplicità il senso o la velocità di
rotazione senza apportare modifiche circuitali, ma solo attraverso degli impulsi digitali.I motori
passo-passo (stepper) a prima vista sembrano dei normali motori elettrici forse un po' grandi e
pesanti; l'unica cosa che li contraddistingue è il numero di cavi che fuoriescono dal loro interno,
infatti, i motori elettrici normali hanno sempre due cavi, uno per il polo positivo, e l'altro per quello
negativo. I motori passo-passo, invece, hanno 5 o 6 cavi. Questa differenza è dovuta al loro
particolare modo di funzionamento. Ognuno dei cavi viene utilizzato per pilotare il motore. Come
tutti i motori elettrici, i motori passo-passo sono formati da un perno centrale chiamato albero che è
la parte che effettivamente ruota. Nei motori passo-passo non ci sono altre parti mobili. Il perno è
retto da dei cuscinetti a sfera che gli permettono di ruotare con gran precisione e poco attrito. Tutto
attorno all'albero ci sono varie bobine (o avvolgimenti) di filo conduttore che al passaggio della
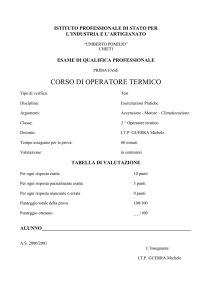
corrente, diventano degli elettromagneti. Quando una di queste bobine viene caricata (si dice anche
energizzata) attira a se qualsiasi materiale ferroso, in particolare l'albero del motore.
L'albero tende a spostarsi di fronte alla bobina caricata così come un chiodo di ferro viene attratto
da una calamita. L'albero, che è vincolato dai cuscinetti a sfera, può solo ruotare nella direzione
della bobina caricata fino a trovarsi di fronte alla bobina. Per ottenere una completa rotazione
dell'albero bisogna energizzare in sequenza tutte le bobine.
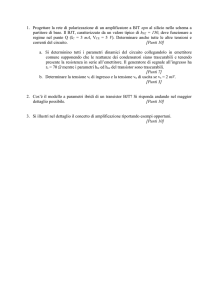
Esempio d’energizzazione di un motore passo-passo.
Questo è uno dei vantaggi di questo tipo di motori; è possibile invertire la rotazione in qualsiasi
momento, eseguire solo una certa parte della rotazione e quindi una ben determinata rotazione
angolare ecc.
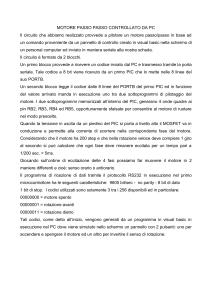
A questo punto entra in gioco il numero di cavi del motore passo-passo. Tutti gli avvolgimenti sono
suddivisi in quattro gruppi chiamati fasi, gli avvolgimenti d’ogni fase non sono posti in sequenza,
ma sono alternati con gli avvolgimenti delle altre fasi in un preciso ordine. Ogni cavo del motore
passo-passo è collegato ad una ben precisa fase, mentre il cavo restante (o i due cavi restanti)
rappresenta l'alimentazione. Per energizzare una determinata fase basta applicare una determinata
differenza di potenziale (tensione) tra il cavo associato a quella fase e il cavo di Vcc, in pratica
bisogna chiudere il circuito concernente quella particolare fase!
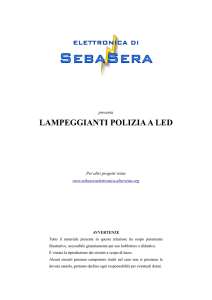
Schema circuitale di un motore passo-passo.
Il numero delle fasi è per convenzione 4, mentre il numero di cavi può essere 5 o 6, dipende se i
collegamenti a Vcc sono esterni al motore ( caso di 6 cavi) o interni (caso di 5 cavi).
Le induttanze del circuito rappresentano gli avvolgimenti, aprendo o chiudendo gli interruttori è
possibile determinare quale fase energizzare alla volta. Da questo momento in poi non ha più
importanza il numero d’avvolgimenti, ma si ragionerà solo sul numero di fasi.
Il circuito infine è costituito da un sensore di pioggia il quale opera in base al principio che se
bagnato dalla pioggia abbassa la sua resistenza interna ed è interfacciato ad un transistor che in
ingresso controlla la tensione fornita dal sensore cosicché quando quest’ultima è alta il transistor è
saturo e in uscita troveremo un valore basso mentre quando per effetto dell’acqua la resistenza
interna si abbassa l’ingresso del transistor rileva una tensione bassa, s’interdice e ci fornisce
un’uscita alta che termina nel microcontrollore dando il via al movimento del tergicristallo.
Il circuito è composto anche da tre interruttori che sono: il fine corsa, l’ON\OFF e il comando per
la velocità.
Il fine corsa è un interruttore posto sulla base del motorino ed è utilizzato come controllo di
posizione della spazzola tergicristallo; il movimento della spazzola deve essere coordinato con
l’accensione dei LED.
Per far questo abbiamo bisogno che si trovi nella posizione iniziale quando partono i LED e per
questo motivo abbiamo inserito il comando del fine corsa cosicché la spazzola continua il ciclo fino
a quando non incontra il tasto, lo schiacci cosi per poter capire che quello è il punto iniziale.
L’interruttore di ON\OFF è utilizzato come tasto d’accensione in mancanza di pioggia ed ha lo
stesso principio di funzionamento di un tergicristallo posto su una qualsiasi automobile.
L’interruttore di media e veloce andatura serve per aumentare la velocità di movimento della
spazzola e dei LED in caso di forte pioggia per pulire al meglio il vetro.
Altri componenti da noi utilizzati sono il LED che sfruttano le proprietà ottiche di alcuni materiali
semiconduttori per produrre fotoni a partire dalla ricombinazione di coppie elettrone-lacuna. Gli
elettroni e le lacune vengono iniettati in una zona di ricombinazione attraverso due regioni del
diodo drogate con impurità di tipo diverso, e cioè di tipo n per gli elettroni e p per le lacune. Il
colore della radiazione emessa è definito dalla distanza in energia tra i livelli energetici di elettroni e
lacune e corrisponde tipicamente al valore della banda proibita del semiconduttore in questione. I
LED sono uno speciale tipo di diodi a giunzione P-N, formati da un sottile strato di materiale
semiconduttore drogato. Quando sono sottoposti ad una tensione diretta per ridurre la barriera di
potenziale della giunzione, gli elettroni della banda di conduzione del semiconduttore si
ricombinano con le lacune della banda di valenza rilasciando energia sufficiente da produrre fotoni.
A causa dello spessore ridotto del chip un ragionevole numero di questi fotoni può abbandonarlo ed
essere emesso come luce. I LED sono formati da GaAs (arseniuro di gallio), GaP (fosfuro di gallio),
GaAsP (fosfuro arseniuro di gallio), SiC (carburo di silicio) e GaInN (nitruro di gallio e indio).
L'esatta scelta dei semiconduttori determina la lunghezza d'onda dell'emissione di picco dei fotoni,
l'efficenza nella conversione elettro-ottica e quindi l'intensità luminosa in uscita. In molti casi i LED
sono alimentati in continua con una resistenza in serie Rs per limitare la corrente diretta al valore di
lavoro, il quale può variare da 5-6 mA fino a 20 mA quando molta luce è richiesta. Il valore della
resistenza in serie Rs è calcolato mediante la legge di Ohm conoscendo la corrente di lavoro
richiesta If, la tensione di alimentazione Vs e la differenza di potenziale del LED alla corrente di
lavoro data, Vf.
Simbolo:
Immagine:
Un secondo componente è il resistore che è un componente elettrico di enorme importanza per le
sue innumerevoli applicazioni sia in apparecchiature elettriche che elettroniche. Il suo utilizzo
principale e' quello e' quello di convertire (dissipare) energia (elettrica), trasformandola in calore,
sebbene non sempre sia questo il suo fine ultimo.
Il resistore e' un componente ideale che risponde interamente alla Legge di Ohm. Nel mondo reale,
i resistori sono dispositivi multiformi, con caratteristiche e limiti operativi ben determinati.
Simbolo:
Immagine:
Un terzo componente è il transistor BJT (transistor a giunzione bipolare) dove una corrente elettrica
è inviata nella base (B) e modula (controlla) la corrente che scorre tra gli altri due terminali noti
come emettitore (E) e collettore (C).
Per fare questo, il transistor sfrutta la vicinanza di due giunzioni P-N opposte: quando la giunzione
base-emettitore viene polarizzata direttamente, i portatori di carica (elettroni e lacune) che
transitano attraverso di essa diffondono verso la vicina giunzione collettore-base, dove vengono in
gran parte catturati dal campo elettrico interno alla giunzione stessa, che in questo modo viene
percorsa da corrente anche se polarizzata inversamente. Tanto maggiore è la frazione di corrente
catturata dalla giunzione di collettore, tanto migliore è il transistor: in un transistor ideale, perfetto,
tutta la corrente della giunzione base-emettitore dovrebbe essere deviata verso il collettore senza
raggiungere mai il contatto di base. In pratica, in un normale transistor per usi generici la corrente
uscente dal collettore è il 98-99% di quella che entra nell'emettitore, e dalla base esce solo l'1-2% di
essa. Il rapporto fra corrente di collettore e corrente di base è detto del transistor.
Immagine simile:
Simbolo:
Un ultimo componente è il condensatore o capacitore è un componente elettrico che immagazzina
l'energia in un campo elettrico, accumulando al suo interno una certa quantità di carica elettrica.
Nella Teoria dei circuiti il condensatore è un componente ideale che puo' mantenere la carica e
l'energia accumulata all'infinito, se isolato (ovvero non connesso ad altri circuiti), oppure scaricare
la propria carica ed energia in un circuito a cui e' collegato.
Il condensatore trova impiego sopratutto nei circuiti a corrente alternata. In questi circuiti, esso
provoca una differenza di fase di 90 gradi fra la tensione applicata e la corrente che lo attraversa.
Immagine (Noi utilizziamo la tipologia b):
Simbolo:
PROCESSO DI REALIZZAZIONE:
Per realizzare la struttura esterna del pullman abbiamo usato del plexiglass e del legno.
Inizialmente ci siamo procurati il plexiglass e lo abbiamo intagliato di varie misure usufruendo
dell'aiuto di alcune macchine specializzate nel taglio del legno.
Una volta intagliati tutti i pezzi abbiamo forato con un trapano la parte raffigurante il parabrezza
creando 8 fori che serviranno ad ospitare 8 led i quali si accenderanno in sequenza per rappresentare
la corsa del tergicristallo; abbiamo praticato altri 4 fori nella parte posteriore e anteriore del pullman
per eventuali fanali e un foro sopra il pullmino per il passaggio dei cavi che alimentano il sensore di
pioggia.
Siamo passati poi all'unione dei pezzi, prima con l'aiuto dell'attack e visto i risultati scadenti
abbiamo bloccato il tutto con delle viti.
Per il bloccaggio del motorino abbiamo usato delle viti e dei dadi per fissare a mezz’aria il motore;
grazie ad un foro fatto in precedenza con la fresatrice abbiamo attaccato al motore un pezzo di
legno con delle lancette attaccate che spunterà fuori dal buco e simulerà l'andatura del tergicristallo.
Siamo passati alla verniciatura, prima di fondo e poi quella effettiva con un colore simile a quello
del ferro e con delle finestre e strisce disegnate di color bianco.
Successivamente è' stato montato anche un alettone e delle piccole decalcomanie sul bus.
E’ stato necessario fissare la basetta al pullman scolpendo una lastra di legno e forandola per gli
interruttori,verniciandola infine di bianco.
Infine il tutto è stato montato con delle viti ed è stata applicata una mascherina davanti al motorino
in modo da vedere solo la lancetta”tergicristallo”.
IL PROGETTO DELLO SCHEMA ELETTRICO DEL PULLMAN:
A questo progetto abbiamo partecipato in tre ed abbiamo cercato di inserire un ipotetico circuito
all’interno del pullman.
Prima di tutto abbiamo stabilito che nella parte inferiore del pullman dovevano passare tre diverse
linee: elettrica, audio e LAN.
Ognuna delle tre linee si diramavano da una cassetta di derivazione posta ad ogni fila di sedili per
un totale di sei cassette di derivazione della linea elettrica, sei cassette della linea LAN e cinque
cassette della linea audio; successivamente abbiamo fatto partire le linee LAN ed elettriche da ogni
cassetta ad un'altra cassetta posizionata sotto la giunzione dei sedili a coppia per un totale di due
cassette ogni coppia di sedili, ed una linea audio verso le casse audio posizionate lateralmente del
pulmino per un totale di otto casse audio.
Poi per ogni sedile abbiamo stabilito di far arrivare due tedesche, due prese RJ ed un interruttore
con la propria lampadina posta sopra i sedili.
Inoltre dalla linea centrale partono tre collegamenti a tre neon sistemati al centro del pullman, una
serie di quattro prese tedesche posizionate al fondo del pullman per eventuali utilizzatori ed altre
due prese verso l’inizio del pullman per un eventuale schermo al plasma con un attacco per
l’antenna TV.
SCHEMA DELL’IMPIANTO AUDIO,LAN E ELETTRICO:
SCHEMA A BLOCCHI DELL’IMPIANTISTICA: