Note su uso delle equazioni differenziali in meccanica
Spesso la risoluzione delle equazioni del moto si ottiene attraverso la risoluzione di equazioni
differenziali lineari a coefficienti costanti. L’uso delle equazioni differenziali è rilevante in
meccanica, ma è spesso utile anche in altri campi perchè le stesse equazioni differenziali regolano
l’evoluzione temporale in sistemi diversi. Per esempio, le equazioni differenziali del primo ordine
regolano il moto in un fluido viscoso, la carica e scarica di un condensatore, la crescita della
popolazione di una colonia di batteri che interagiscono con una quantità limitata di cibo, il
decadimento radiattivo. Ancora esempi: le equazioni differenziali del secondo ordine regolano il
moto di una massa legata ad una molla, il moto del pendolo, le oscillazioni delle cariche in un
circuito risonante con capacità C e induttanza L.
In generale si definisce una equazione differenziale lineare a coefficienti costanti:
(*) an
d nx
d n−1 x
d 2x
dx
+
a
+
.....
a
+ a1
+ a0 x = f (t )
n −1
2
n −1
2
n
dt
dt
dt
dt
associata a (*) c’è sempre la euqazione omogenea associata:
d nx
d n−1 x
d 2x
dx
(**) an n + an−1 n−1 + .....a2 2 + a1
+ a0 x = 0
dt
dt
dt
dt
L’equazione omogenea (**) ha proprietà interessanti:
se x=u(t) è una funzione soluzione di (**), allora anche Au(t) è soluzione (dove A è una costante),
se x=u(t) e x=v(t) sono funzioni soluzioni di (**), allora anche una qulunque combinazione lineare
w(t)=c1u(t)+c2v(t) è soluzione di (**) (dove c1 e c2 sono costanti).
Inoltre, se u(t) è soluzione della equazione differenziale (*) e se v(t) è soluzione della equazione
differenziale (*), allora w(t)=u(t)-v(t) è soluzione della equazione omogenea (**).
Da tutto ciò si può dimostrare che, se w(t) è una qualunque di tutte le possibili soluzioni della
equazione omogenea (**) (che costituiscono l’insieme V0) e uf(t) è una soluzione particolare della
equazione diffrenziale (*), allora, al variare di w(t) all’interno dell’insieme V0, tutte le soluzioni di
(*) si trovano con u(t)= uf(t)+w(t). Quindi basta trovare una qualunque soluzione particolare di (*) e
tutte le soluzioni di (**) (impresa di solito più facile) per trovare tutte le soluzioni di (*).
Di seguito, per semplicità, mostreremo esempi in cui il termine di destra della (*) f è costante nel
tempo.
%%%%%%%
L’esempio più semplice della dinamica è il moto uniformemente accelerato.
L’equazione differenziale è
d 2x
d 2 x F0
(1.*) m 2 =⇒ 2 =
dt
dt
m
dove F0 è una forza costante. L’omogenea associata è:
d 2x
=0
dt 2
Quali funzioni x(t) soddisfano la (1.**)? Tutti e solo i polinomi di grado uguale o inferiore al primo.
E la soluzione particolare della (1.*)? Integrando si ottiene uf(t)=(F0/2m)t2.
Quindi la soluzione generale della equazione differenziale (1.*) sarà:
(1.**)
F0 2
t + c1t + c2
2m
c1 e c2 sono costanti arbitrarie (2 per le equazioni differenziali del secondo ordine, 1 per quelle del
primo ordine) e si trovano imponendo le condizioni iniziali (2 per le equazioni differenziali del
secondo ordine, 1 per quelle del primo ordine) che dobbiamo conoscere per risolvere il problema:
Nell’esempio sopra menzionato x(0)=c2 e v(0)=c1.
x(t ) =
%%%%%%%
Un altro esempio (equazione di primo grado) si ha per il moto in mezzo viscoso.
Quando un corpo è in moto in un un fluido viscoso (per esempio un grave in aria) vi è una forza
viscosa che si oppone al moto. Essa ha la direzione del moto, segno opposto e modulo del tipo:
F(v)=γv+δv2
(2.1)
Per una sfera di raggio R il coefficiente γ=6πηR (legge di Stokes), dove η è la viscosità del mezzo.
Per corpi di forma diversa, γ è proporzionale alla viscosità ma i coefficienti che tengono conto di
forma e dimensione sono diversi.
Il termine quadratico in velocità si può esprimere come δ=(1/2)DρA, dove A è l’area della sezione
del corpo, ρ è la densità del mezzo, D è un numero determinato empiricamente (coefficiente di
resistenza, D=0.5 per sfere e può arrivare a 2 per oggetti di forma irregolare). Di solito il termine
quadratico prevale su quello lineare nella equazione (2.1) per oggetti di grandi dimensioni e/o che si
muovono con velocità elevate. Per velocità corpi di dimensioni più ridotte e più in generale lontani
dal moto in regime vorticoso o turbolento, (quando il moto relativo del fluido intorno al corpo è di
tipo laminare) allora prevale il termine lineare.
Il caso che esemplifichiamo di seguito è quindi quello di un moto in un mezzo viscoso che esercita
na forza proporzionale alla velocità. Questo moto si risolve con una equazione differenziale di
primo grado.
Un esercizio classico è quello di una pallina che cade nell’aria. Esempi di questo tipo si trovano nei
compitini degli anni precedenti (si vedano II compitino 2006-2007 (1-2); II compitino 2007-2008
(6-7)). Di solito vi è un corpo di massa m che viene lasciato libero in condizioni di quiete nel campo
gravitazionale terrestre. Il fluido esercita una una forza di attrito pari a –γv. Di solito si chiede
quanto valga la velocità limite e in quanto tempo vengono raggiunti valori di velocità intermedi.
Per capire quanto valga la velocità limite non importa risolvere l’equazione differenziale, basta
scrivere la seconda legge della dinamica con tutte le forze in gioco e vedere quando la risultante
delle forze è nulla. Il valore di velocità corrispondente è il valore limite, in quanto da quel punto in
poi l’accelerazione sarà nulla.
Risolviamo invece il problema nel caso più generale possibile.
La pallina si trova in un fluido (per es. aria).
Essa è soggetta alla forza peso, alla spinta di Archimede (che però è trascurabile nel caso in cui la
densità del fluido sia molto inferiore a quella della pallina).
Una volta in moto la pallina è sottoposta alla forza di attrito viscoso proporzionale alla velocità,
Fv=-γv
Se vale la legge di Stokes allora γ=6πηR, dove R è il raggio della pallina.
Impostiamo questo problema in modo più generale possibile, così la sua risoluzione può essere
usata anche per problemi analoghi. Il moto avviene tutto verticalmente e quindi fissando l’asse y
delle coordinate orientato positivo verso l’alto avremo, come risultante delle forze:
∑F
y
= −mg + FA − γv
dove m=ρSV e V è il volume della pallina, mentre ρs è la densità della pallina.
La forza di Archimede è FA=ρflVg, dove ρfl è la densità del fluido.
Per la seconda legge della dinamica possiamo scrivere
dv
ma = m
= −mg + FA − γv
dt
e dividendo per la massa
F
dv
γ
= −g + A − v
(2.2)
dt
m m
i due termini costituiti dal campo gravitazionale g e dalla spinta di Archimede sono due termini
costanti e possono essere espressi da un singolo parametro che possiamo definire campo
gravitazionale efficace ge, che sarà uguale a g nel caso che la spinta di Archimede sia trascurabile,
ma che, nel caso la spinta di Archimede sia non trascurabile mi definirà una costante da moltiplicare
per la massa della pallina per avere il valore della forza costante che agisce su di essa.
ρ fl ⎞
⎛
FA
⎟
= g ⎜⎜1 −
m
ρ s ⎟⎠
⎝
Da qua si vede per esempio che se ρfl> ρS la forza efficace sarà diretta verso l’alto. Un corpo di
densità inferiore a quella del fluido viene spinto verso l’alto. Invece se ρS> ρfl la forza costante mge
sarà diretta verso il basso.
ge = g −
Inoltre, siccome m/γ ha le dimensioni di un tempo, posso scrivere m/γ=τ nell’equazione del moto,
dove τ è un tempo caratteristico che si ottiene a partire dai due dati del problema γ e m.
In particolare, se abbiamo a che fare con una sfera e vale la relazione di Stokes γ=6πηR, avremo
m 4πR 3 ρ S 2 R 2 ρ S
=
che il tempo caratteristico τ = =
γ 3(6πηR )
9η
Si ricorda che la viscosità dell’aria (in condizioni di pressione e temperatura normali) è di
η=1.8×10-5 kg m-1 s-1, mentre quella dell’acqua è di η=1×10-3 kg m-1 s-1. Quella della glicerina è di
η=1.49 kg m-1 s-1
Quindi, dato un corpo, il suo tempo caratteristico potrebbe variare molto a seconda della viscosità
del mezzo in cui è inserito. Maggiore è la viscosità, minore è il tempo caratteristico. Oppure, a
parità di mezzo, si vede che i tempi più corti sono associati a corpi di dimensioni inferiori.
L’equazione del moto (2.2) si può quindi scrivere come
dv v
+ = −ge
dt τ
(2.3)
Per risolverla completamente, dobbiamo applicare il metodo delle equazioni differenziali.
Una soluzione particolare della (2.3), una soluzione molto semplice la si trova pensando alla
velocità limite che il corpo raggiunge a tempi lunghi: infatti da (2.2) emerge che se il corpo parte da
fermo (v=0), all’inizio la sua velocità aumenta, ma non così la sua derivata che tende a diminuire.
Via via la derivata diminuisce fino a raggiungere lo zero.
γv
v
Questa condizione la si raggiunge quando 0 = + g e = + g e
m
τ
m
E quindi per v = vlim = − g e = −τg e
γ
La velocità limite ha segno negativo (se ge>0) perché il corpo è diretto verso il basso.
Nel caso della sferetta (se vale la relazione di Stokes) si ha:
2 R 2 (ρ S − ρ fl )
2R 2 ρ S
m
v = vlim = − g e = −
ge = −
g
γ
9η
9η
da cui si evince che basse velocità limite si ottengono quanto i tempi caratteristici τ sono corti e
quindi quando la viscosità è alta, la sferetta ha dimensioni ridotte e la differenza di densità fra la
sferetta e il fluido è piccola.
Se vogliamo trovare la legge che descrive v(t), risolviamo la (2.3), equazione del moto
dv v
+ = − g e , con m/γ=τ .
dt τ
Per risolvere la (2.3), prima troviamo tutte le soluzioni dell’omogenea:
dv v
(2.4)
+ =0
dt τ
l’unica funzione la cui derivata è proporzionale a sé stessa cambiata di segno è l’esponenziale:
⎛ t⎞
v(t ) = A exp⎜ − ⎟ con τ= m/γ e A costante arbitraria.
⎝ τ⎠
Tutte le soluzioni dell’equazione differenziale (2.3) si trovano con la somma fra le soluzioni
dell’omogenea e una soluzione particolare ( per es. v(t)=vlim).
⎛ t⎞
v(t ) = vlim + A exp⎜ − ⎟
⎝ τ⎠
(2.5)
La costante arbitraria A si trova imponendo la condizione iniziale (v(t=0)=0):
⎛ 0⎞
0 = vlim + A exp⎜ − ⎟ = vlim + A da cui A=- vlim
⎝ τ⎠
e quindi:
⎡
⎛ t ⎞⎤
v(t ) = vlim ⎢1 − exp⎜ − ⎟⎥
(2.6)
⎝ τ ⎠⎦
⎣
Se invece la condizione iniziale fosse stata v(0)=v0 con v0 maggiore di vlim allora
⎛ 0⎞
v0 = vlim + A exp⎜ − ⎟ = vlim + A da cui A=v0- vlim
⎝ τ⎠
e quindi:
⎛ t⎞
v(t ) = vlim + (v0 − vlim ) exp⎜ − ⎟
⎝ τ⎠
(2.7)
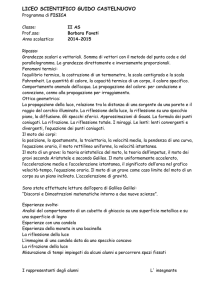
In un diagramma tempo-velocità, le funzioni (2.6) e (2.7) hanno questo andamento, entrambe
tendenti a vlim per tempi grandi:
1.6
1.4
v/vlim
1.2
Eq.2.7
1.0
Eq.2.6
0.8
v=0.632 vlim
0.6
0.4
0.2
0.0
t=τ
0
2
4
6
8
10
12
t/τ
Per trovare dopo quanto tempo t* si raggiunge un certo valore di velocità, per es. la velocità pari a
vlim/3, si risponde cercando il tempo t* per il quale
⎡
⎛ t *⎞
⎛ t * ⎞⎤ v
v(t *) = vlim ⎢1 − exp⎜ − ⎟⎥ = lim da cui 2 / 3 = exp⎜ − ⎟ e t* = τ ln(3 / 2) = τ 0.4055
3
⎝ τ ⎠⎦
⎝ τ ⎠
⎣
%%%%%%%
Un esempio di equazione differenziale di secondo grado che rappresenta molti sistemi dinamici è
quello dell’oscillatore armonico. Si può schematizzare un oscillatore armonico come una molla di
costante elastica k con attaccato un corpo di massa m.
La molla può essere orizzontale e il corpo trovarsi su un piano orizzontale privo di attrito (caso A)
oppure (per es.) essere verticale con il corpo di massa m appeso (caso B). Nel secondo caso la forza
peso (costante) si aggiunge alla forza della molla. I casi A e B sono esaustivi dell’oscillatore
armonico e sono: caso B, l’equazione differenziale dell’oscillatore armonico con forza costante
applicata F0 e (caso A), la sua equazione omogenea associata.
Abbiamo quindi
F
F
d 2x
d 2x k
d 2x
m 2 = −kx + F0 ⇒ 2 + x = + 0 ⇒ 2 + ω 2 x = + 0 (Caso B)
dt
dt
m
m
dt
m
2
2
2
d x
d x k
d x
m 2 = −kx ⇒ 2 + x = 0 ⇒ 2 + ω 2 x = 0
(caso A)
dt
dt
m
dt
(3.1)
(3.2)
Dove ho posto ω2=k/m, visto che i termini a sinistra della equazione (3.2) hanno le dimensioni di
una lunghezza diviso un tempo al quadrato. Bisogna notare che il numero ω2=k/m è ricavabile a
partire da k e m, costanti note del problema.
Risolvendo la (3.2) (omogenea) si otterranno tutte le possibili soluzioni a meno di due costanti
arbitrarie determinate dalle condizioni iniziali su posizione e velocità.
La x(t) soluzione della (3.2) deve essere tale che la sua derivata seconda sia uguale a sé stessa
cambiata di segno. Le uniche funzioni capaci di ciò sono le trigonometriche seno e coseno.
Infatti
d2
dt 2
cos(ωt ) →− ω 2 cos(ωt )
d2
dt 2
sin(ωt ) →− ω 2 sin(ωt )
Quindi tutte le possibili soluzioni della equazione (3.2) sono delle combinazioni lineari delle due:
x(t ) = c1 cos(ωt ) + c2 sin (ωt ) , oppure passando attraverso le formule di addizione:
x(t ) = A cos(ωt + φ )
c
con c1 = A cos(φ ); c2 = − A sin (φ ); tan (φ ) = − 2
c1
Per la velocità abbiamo:
dx
v(t ) =
= −c1ω sin (ωt ) + c2ω cos(ωt )
dt
E per la accelerazione:
dv
a (t ) =
= −c1ω 2 cos(ωt ) − c2ω 2 sin (ωt ) = −ω 2 x(t )
dt
Le coppie di costanti arbitrarie (c1 , c2) o (A,φ) si determinano a partire dalle condizioni iniziali
x(t=0) e v(t=0):
x(0)=c1
v(0)=c2ω
Una volta determinate c1 e c2, la soluzione generale della (3.2) è quindi ottenuta.
Il moto è quindi di tipo oscillatorio sinusoidale in t con pulsazione ω.
k
, la pulsazione ω e il periodo T (=2π/ω) sono determinati completamentedai valori
Poiché ω =
m
della costante elastica k della molla e della massa m del corpo che sta attaccato alla molla.
Che succede se è presente la forza costante F0 (eq.3.1)?
La soluzione generale sarà la somma di tutte le possibili soluzioni dell’omogenea (che abbiamo già
trovate) più una soluzione particolare della (3.1).
La più semplice soluzione particolare della (3.1) è x(t)=x0=F0/k.
k
La soluzione generale sarà del tipo oscillante con pulsazione ω =
rispetto ad un punto di
m
equilibrio non nullo:
x(t ) = x0 + A cos(ωt + φ )
potremmo ridefinire l’asse x in modo tale che X=x-x0 e ritroveremmo il caso dell’omogenea.
Considerazioni energetiche
La frequenza di oscillazione dell’oscillatore armonico è determinata dalla costante elastica della
molla e dalla massa:
k
ω=
m
Non varia al variare dell’ampiezza di oscillazione, la quale invece è direttamente associata
all’energia del sistema.
Bisogna ricordare che il sistema è conservativo (la forza elastica è conservativa).
Consideriamo il caso dell’oscillatore armonico di eq. (3.2)
m
d 2x
d 2x k
d 2x
kx
x
=
−
⇒
+
=
0
⇒
+ ω 2 x = 0 ; con ω =
dt 2
dt 2 m
dt 2
k
m
Le soluzioni sono:
x(t ) = A cos(ωt + φ )
Per la velocità abbiamo:
dx
v(t ) =
= − Aω sin (ωt + φ )
dt
E per la accelerazione:
dv
a (t ) =
= − Aω 2 cos(ωt + φ ) = −ω 2 x(t )
dt
Le soluzioni sono sinusoidali. Le funzioni trigonometriche oscillano fra -1 e 1. Ad ogni intervallo
∆t=T otteniamo la stessa posizione con la stessa velocità.
In modulo, la massima estensione xmax si ha per |xmax|=A;
la massima velocità vmax si ha per |vmax|=ωA;
la massima accelerazione si ha per |amax|=ω2A.
Consideriamo per esempio come condizioni iniziali quelle in cui il corpo si trovi in x=x0 con
velocità nulla (massima estensione della molla). Allora x(0)=x0 e v(0)=0,
e quindi x(0) = A cos(φ ) = x0 ; v(0) = − Aω sin (φ ) = 0
φ=0 e A=x0
x(t ) = x0 cos(ωt ) ; v(t ) = − x0ω sin (ωt ) ; a(t ) = − x0ω 2 cos(ωt )
Se scriviamo l’energia, otteniamo per l’energia potenziale U =
1 2 1 2
2
kx = kx0 [cos(ωt )] e per la
2
2
1 2 1
1
2
2
mv = mω 2 x02 [sin (ωt )] = kx02 [sin (ωt )] .
2
2
2
La somma delle due deve essere una costante del moto:
1
1
1
2
2
E = U + K = kx02 [cos(ωt )] + kx02 [sin (ωt )] = kx02
(3.3)
2
2
2
dove l’ultimo passaggio è dovuto ad una identità trigonometrica.
L’energia meccanica totale (3.3) è costante ed è uguale alla energia potenziale posseduta all’istante
iniziale. Dalla (3.3) si vede che c’è un legame stretto fra l’energia del sistema e l’ampiezza di
oscillazione x0 (o massima ampiezza) del sistema.
energia cinetica K =
L’energia cinetica si annulla ogni qual volta la posizione x raggiunge la ampiezza massima di
oscillazione. D’altra parte, quando il corpo passa per x=0 dove l’energia potenziale è nulla (molla
non estesa né compressa) l’energia cinetica è massima. L’energia meccanica passa da una forma
all’altra con un andamento periodico con periodo pari a π/ω (la metà del periodo dello spostamento).
Se le condizioni iniziali fossero state tali che il corpo si trovasse in x=0 (molla non estesa) con una
certa velocità non nulla v0, allora x(0)=0 e v(0)=v0, e quindi:
x(0) = A cos(φ ) = 0 ; v(0) = − Aω sin (φ ) = v0
φ=-π/2 e A=v0/ω
x(t ) =
π⎞
π⎞
π⎞
⎛
⎛
⎛
cos⎜ ωt − ⎟ ; v(t ) = −v0 sin ⎜ ωt − ⎟ ; a (t ) = −v0ω cos⎜ ωt − ⎟
ω
2⎠
2⎠
2⎠
⎝
⎝
⎝
v0
Se scriviamo l’energia, otteniamo per l’energia potenziale
1
1 v2
U = kx 2 = k 02
2
2 ω
2
⎡ ⎛
1 2⎡ ⎛
π ⎞⎤
π ⎞⎤
⎢cos⎜ ωt − 2 ⎟⎥ = 2 mv0 ⎢cos⎜ ωt − 2 ⎟⎥
⎠⎦
⎠⎦
⎣ ⎝
⎣ ⎝
2
2
⎡ ⎛
1
1
π ⎞⎤
e per l’energia cinetica
K = mv 2 = mv02 ⎢sin ⎜ ωt − ⎟⎥ .
2
2
2 ⎠⎦
⎣ ⎝
La somma delle due è una costante del moto ed è uguale alla energia cinetica posseduta all’inizio:
1
E = U + K = mv02
2
%%%%%%%%%
Un altro esempio la cui soluzione della equazione del moto è del tipo visto per l’oscillatore
armonico è il pendolo semplice nel regime delle piccole oscillazioni. Data una massa m legata ad
una corda tesa inestensibile di massa trascurabile e lunghezza L, l’equazione del moto si risolve
considerando che il moto avviene lungo una circonferenza. Le forze in gioco sono: la tensione della
corda e la forza peso. Si scrive lo spostamento in coordinate polari, s=Lθ, dove θ è l’angolo che la
corda forma con la verticale. Le equazioni del moto, nella componente radiale e tangenziale sono:
v2
componente radiale: − T + mg cos θ = −m
L
d 2θ
componente tangenziale: − mg sin θ = mL 2
dt
Per la componente tangenziale, posso scrivere:
d 2θ g
+ sin θ = 0
dt 2 L
per piccoli angoli per cui vale l’espansione in serie di Taylor
sin θ ≅ θ −
θ3
3!
+
θ5
5!
+ ... arrestata al primo termine:
d 2θ g
d 2θ
+ θ = 0 ⇒ 2 + Ω 2θ = 0 , dove Ω =
2
dt
L
dt
g
L
La soluzione per le piccole oscillazioni (cioè quando sin θ ≅ θ ) sarà del tipo sinusoidale:
θ (t ) = A cos(Ωt + φ )
con pulsazione Ω e periodo T = 2π
l
(NON dipendente dalla massa m ma solo dalla lunghezza
g
del pendolo).
La velocità angolare istante per istante vale:
dθ
= ω (t ) = −ΩA sin (Ωt + φ )
dt
Le costanti arbitrarie si determinano dalle condizioni iniziali:
dθ (0 )
θ (0) = A cos(ϕ ) ;
= ω (0) = −ΩA sin (φ )
dt