Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
C
A
P
I
T
O
L
12
Il Principio dei Lavori Virtuali
e le sue applicazioni
di Giuliano Augusti e Paolo Maria Mariano
Il Principio dei Lavori Virtuali appassiona da molti secoli gli studiosi di Meccanica. Le figure
sopra riportate illustrano studi pubblicati rispettivamente nel 1581, nel 1665 e nel 1725. In
questo capitolo si mostra come il Principio dei Lavori Virtuali può essere usato per risolvere
problemi dell’Ingegneria moderna.
O
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
478
Il Principio dei Lavori Virtuali
e le sue applicazioni
12.1 INTRODUZIONE
In questo capitolo si presenta una metodologia generale che permette
di risolvere molti problemi della Scienza delle Costruzioni, quali per
esempio trovare reazioni vincolari, spostamenti di punti di una
struttura, forze e momenti interni, ecc., senza fare ricorso volta per volta
a procedimenti ed espedienti particolari. Essa è basata sul cosiddetto
Principio (o Teorema) dei Lavori Virtuali (detto anche, forse più appropriatamente, “del Lavoro Virtuale” e di seguito talvolta indicato con
l’acronimo PLV).
La definizione di lavoro come prodotto di una forza data per lo spostamento del suo punto di applicazione è nota dalla Fisica elementare. Il
lavoro L è dato dal prodotto scalare del vettore forza F per il vettore spostamento u, cioè dalla somma dei prodotti delle rispettive componenti in
un dato sistema di riferimento:
L = F · u = Fx u x + Fy u y + Fz u z
(12.1)
Ovviamente, se le forze applicate sono più d’una, il lavoro è dato dalla
somma di tante espressioni come la (12.1) quante sono le forze coinvolte
(una formula analoga vale per il lavoro di una o più coppie per le rispettive rotazioni).
Se lo spostamento u è quello effettivamente subito dal punto di applicazione della forza F, al lavoro si può attribuire l’aggettivo reale.1
Più in generale, si può pensare a forze applicate a un corpo e a un
qualsiasi insieme di spostamenti dei punti di applicazione compatibili con
i vincoli interni ed esterni del corpo stesso: in tal caso si attribuisce l’aggettivo virtuale (cioè immaginario, ideale) al lavoro che si indica nel seguito con L v . Nelle applicazioni, si associa di solito il lavoro virtuale a
spostamenti piccolissimi (perché ci si limita spesso ad analisi sviluppate
nell’ambito di teorie linearizzate), cioè ad atti di moto (avendo così a che
fare in realtà con potenze virtuali): nel seguito tale associazione sarà sottintesa.
Il concetto di lavoro virtuale permette di costruire la metodologia generale di analisi che è oggetto di questo capitolo. Più precisamente, nel
Paragrafo 12.2 si tratta del principio dei lavori virtuali per gli atti di moto
rigido; tramite esso si possono determinare le reazioni vincolari e gli sforzi
(forze e momenti) interni in sezioni di travi staticamente determinate (si
veda la definizione nel Paragrafo 5.1). Il principio viene esteso nel Paragrafo 12.3 agli atti di moto deformativo; si possono così determinare (Paragrafo 12.4) spostamenti e rotazioni in punti specifici di una trave elastica, nonché (Paragrafi 12.5-6) trovare reazioni vincolari, sforzi interni
e spostamenti di travi staticamente indeterminate.
Per semplicità, la trattazione viene limitata a travi, cioè a corpi solidi
con una dimensione prevalente (per i quali si può ragionare in termini di
forze e momenti interni, caratteristiche peculiari delle sezioni ortogonali
all’asse della trave, e trattare le deformazioni come movimenti relativi tra
sezioni), ma essa è facilmente estendibile a corpi solidi di qualsiasi forma
e alle tensioni puntuali.
1
Da notare che, se la forza è applicata a una struttura o corpo vincolato, in genere l’intensità
delle forza varia durante la sua applicazione, mentre varia lo spostamento al deformarsi della
struttura. In questo caso il lavoro è dato dall’integrale dell’intensità istantanea della forza per lo
spostamento del punto di applicazione: si giunge così al concetto di lavoro (o energia) di deformazione, introdotto nel Capitolo 11, Paragrafo 11.2 e seguenti.
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
12.2 IL PRINCIPIO DEL LAVORO VIRTUALE
PER ATTI DI MOTO RIGIDO
12.2 Il Principio del Lavoro Virtuale
per atti di moto rigido
Per un qualsiasi corpo, un generico cambiamento di configurazione è detto
rigido se non altera la distanza tra qualsiasi coppia di punti del corpo
stesso: esso è quindi solo un cambiamento di assetto e si compone di una
traslazione e di una rotazione. Un corpo si dice rigido quando ammette
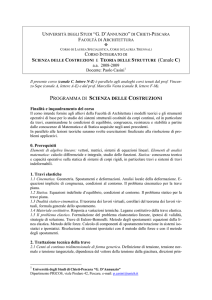
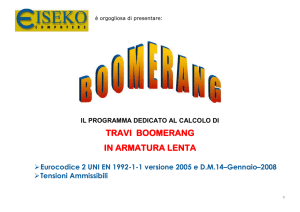
solo cambiamenti rigidi di configurazione. Per esempio, in ambiente bidimensionale (ove, per semplicità, vengono sviluppate tutte le analisi presentate nel seguito), con riferimento alla trave AB in Figura 12.1, intesa
y
B
P
uP
A
u0
ϑ
O≡A
P
B
x
Figura 12.1
come corpo rigido, lo spostamento del generico punto P nella configurazione AB nel punto P in A B ha componenti u xP e u yP date da
u xP = u 0x − q y − y 0
(12.2)
u yP = u 0y + q x − x 0
(12.3)
ove q è la rotazione della trave nel piano xy, considerata positiva in verso
antiorario, mentre u 0x e u 0y sono le componenti rispettivamente lungo l’asse
x ed y dello spostamento u0 di un punto arbitrario della trave di coordinate (x 0 , y 0 ). È lecito identificare tale punto con A (qui coincidente con
l’origine del sistema di riferimento considerato); in tal caso x 0 e y 0 sono
le coordinate del punto A e sono quindi entrambe pari a zero; le Equazioni (12.2), (12.3) vengono così ulteriormente semplificate.
È essenziale precisare che le Relazioni (12.2) e (12.3) valgono quando
l’angolo q è piccolo, altrimenti l’espressione dello spostamento del punto
P è più complessa e coinvolge funzioni trigonometriche dell’angolo q.
Sia dato un sistema di forze F1 , . . . Fn di componenti (Fx1 , Fy1 ),…
n
(Fx , Fyn ) applicate sulla trave AB nei punti P1 , . . . , Pn di coordinate
(x 1 , y 1 ), . . . , (x n , y n ) . Assegnato un generico atto di moto rigido della
trave AB, è possibile calcolare il lavoro (12.1) di ogni singola forza Fi,
i = 1, . . . , n , per lo spostamento ui del suo punto di applicazione, spostamento indotto dall’atto di moto rigido arbitrario, quindi virtuale, che
si induce sul corpo. Il lavoro totale L v è dato dalla somma dei lavori delle
singole forze. Siccome le analisi qui di seguito sono sviluppate per semplicità solo in ambiente bidimensionale, precisamente nel piano xy, il lavoro virtuale totale del sistema di forze F1 , . . . Fn agenti sulla trave AB è
dato da
n
i i
Lv =
Fx u x + Fyi u iy
(12.4)
i=1
479
m
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
480
Il Principio dei Lavori Virtuali
e le sue applicazioni
È possibile mostrare che la trave AB, soggetta al sistema di forze F1 , . . . Fn ,
è in equilibrio se
Lv = 0
(12.5)
per qualsiasi atto di moto rigido che si attribuisca alla trave.
È questo il principio dei lavori virtuali per corpi rigidi. La generalizzazione della Relazione (12.4) al caso tridimensionale è immediata: basta aggiungere il contributo della componente delle varie forze lungo
l’asse z per le relative componenti di spostamento.
Il fatto che la Condizione (12.5) debba valere per qualsiasi atto di
moto rigido, una volta che il sistema di forze sia stato assegnato, è essenziale per la valutazione dell’equilibrio. Sostituendo infatti nella (12.4) le
relazioni (12.2) e (12.3) si vede facilmente che la Relazione (12.5) diventa
n
n
n
i i
Fxi u 0x +
Fyi u 0y + q
Fx (y − y 0 ) + Fyi (x i − x 0 ) = 0
i=1
i=1
i=1
(12.6)
L’imporre che la (12.6) sia valida per qualsiasi scelta degli spostamenti
rigidi, quindi per qualsiasi scelta di u 0x , u 0y e q, implica che devono verificarsi le relazioni
n
Fxi = 0
(12.7)
i=1
n
i=1
n
Fyi = 0
(12.8)
Fxi y i − y 0 + Fyi x i − x 0 = 0
(12.9)
i=1
u 0x ,
u 0y e q non fosse lasciata arbitraria, non sarebbe leOve la scelta di
cito dedurre le (12.7), (12.8) e (12.9) dalla Condizione (12.6).
La (12.7) e la (12.8) richiedono che la somma delle componenti delle
forze F1 , . . . Fn lungo l’asse x sia pari a zero così come la somma delle
componenti lungo y. Le due Relazioni (12.7) e (12.8) equivalgono quindi
all’equazione di equilibrio alla traslazione
n
Fi = 0
(12.10)
i=1
che è la prima equazione della statica (somma delle forze pari a zero).
In maniera analoga è immediato riconoscere che la (12.9) non è altro che
la richiesta che la somma dei momenti M1 , . . . Mn delle forze F1 , . . . Fn
rispetto al punto arbitrario (x 0 , y 0 ) sia pari a zero, cioè
n
Mi = 0
(12.11)
i=1
che è la seconda equazione della statica (equilibrio alla rotazione).
Quando si considera un corpo vincolato, nel relativo schema di corpo
libero agiscono sul corpo sia le forze esterne sia le reazioni vincolari, le
quali compaiono come incognite nelle equazioni (12.10) e (12.11). Si ha
a che fare quindi con un sistema di Equazioni lineari: se si possono scrivere tante equazioni indipendenti quante sono le reazioni vincolari incognite e il determinante della matrice dei coefficienti di tale sistema è diverso da zero, la struttura si definisce staticamente determinata; le reazioni
incognite si possono cioè determinare esclusivamente dalle condizioni di
equilibrio (12.10) e (12.11). Se invece il numero delle reazioni vincolari
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
(incognite) è maggiore di quello dei gradi di libertà del sistema e il rango2
della matrice dei coefficienti è pari al numero di gradi di libertà, le sole
condizioni di equilibrio non sono sufficienti a determinare le incognite e
la struttura si definisce staticamente indeterminata (si vedano i Paragrafi
2.9 e 5.1). Infine, se il numero delle reazioni vincolari è inferiore a quello
dei gradi di libertà, la struttura ammette spostamenti rigidi (è cioè un meccanismo) e l’equilibrio può essere verificato solo per particolari schemi
di carico. Tutti i casi in cui il rango della matrice dei coefficienti del sistema delle equazioni di equilibrio è inferiore al numero delle incognite
(cioè delle reazioni vincolari) rappresentano situazioni in cui alcuni vincoli sono mal disposti in quanto ripetono le restrizioni imposte da altri.
Nel caso di strutture staticamente determinate, detto n il numero delle
reazioni vincolari incognite, il PLV consente di scrivere n equazioni ciascuna in una sola incognita, invece di un sistema di n equazioni in n incognite.3 A tal fine basta imporre allo schema di corpo libero della trave
un atto di moto che faccia compiere lavoro a una sola reazione, diciamo
R1, e applicare la Condizione (12.5) ottenendo così un’equazione algebrica nella quale appare la sola incognita R1. Per maggiore evidenza, si
può immaginare di sopprimere soltanto il vincolo corrispondente alla reazione R1 e di sostituirlo con la R1 stessa: la struttura acquista la possibilità di una classe di atti di moto virtuali rigidi nella quale compiono lavoro le forze esterne (note) e la R1 (incognita). A questo punto, la
Condizione (12.5) e l’arbitrarietà dell’atto di moto rigido permettono di
determinare un’equazione algebrica in cui la sola incognita è R1.
Nel seguito, lo schema risultante dalla soppressione di un vincolo e
dalla sua sostituzione con la reazione pertinente viene chiamato schema
di corpo semilibero. La stessa locuzione viene anche usata ove si sopprimano più vincoli ma non li si eliminino tutti.
12.2 Il Principio del Lavoro Virtuale
per atti di moto rigido
481
m
2
Si ricorda che si definisce rango di una matrice quadrata l’ordine massimo dei minori diversi da zero. Se si ha per esempio una matrice 3×3 di cui al massimo le sottomatrici 2×2 hanno
determinante diverso da zero, si dirà che la matrice è di rango 2; se invece la matrice stessa ha
determinante diverso da zero, allora si dirà che essa è di rango 3.
3
Questo procedimento semplifica di molto la soluzione manuale e può essere utilizzato per
verificare il valore di una o più incognite se si usano procedimenti di soluzione automatica.
ESEMPIO 12.01
Determinare la reazione RB del carrello nell’estremo destro
della trave rappresentata nell’Esempio 5.01 e verificare che la
componente orizzontale RH della reazione della cerniera A sia
nulla.
F
Se si sopprime il vincolo B e lo si sostituisce con la reazione
incognita RB, si ottiene lo schema di corpo semilibero rappresentato nella Figura 12.2.
La trave AB, di lunghezza , ha in queste condizioni un
solo grado di libertà nel piano: la rotazione q attorno al punto
A, rotazione che può essere scelta in maniera arbitraria e che
induce uno spostamento verticale dei punti di applicazione
delle forze F ed RB , quest’ultima di intensità RB incognita.
Un possibile arbitrario atto di moto rigido porta la trave nella
A
B
RB
1
2
Figura 12.2
1
2
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
configurazione variata descritta nella Figura 12.3, ove l’ampiezza degli spostamenti in C e B è data da
uC = q
2
u B = q
(12.12)
Si voglia ora calcolare la reazione orizzontale nel punto A.
Lo schema di corpo semilibero corrispondente è descritto
nella Figura 12.4 (alla cerniera in A è stato sostituito un carrello che permette la traslazione orizzontale della trave).
F
RA
ϑ
Figura 12.4
A
B
C
1
2
In questo caso, un arbitrario rappresentante della classe dei
possibili moti rigidi virtuali ammissibili per lo schema semilibero considerato genera una configurazione variata come
quella in Figura 12.5, ove uA è lo spostamento del punto A,
di ampiezza uA arbitraria.
1
2
Figura 12.3
Il lavoro della forza esterna F, di intensità F , è quindi dato
da
−Fq
(12.13)
2
il segno meno dovuto al fatto che lo spostamento di C avviene in verso opposto a quello della forza F, mentre il lavoro della reazione vincolare in B è pari a
R B q
(12.14)
Il principio dei lavori virtuali (12.5) richiede che, per l’equilibrio, RB debba essere tale che
+ R B q = 0
(12.15)
2
qualunque sia il valore di q che è scelto arbitrariamente ma
−Fq
è piccolo per quanto ricordato a commento delle relazioni
(12.2) e (12.3)). Di conseguenza, dalla (12.15) si deduce
RB =
F
2
un risultato già ottenuto nell’Esempio 5.01.
(12.16)
F
uA
RA
Figura 12.5
Di conseguenza, siccome lo spostamento del punto C è anch’esso pari a uA, perché l’atto di moto è rigido, ed è altresì
ortogonale alla forza F, il lavoro di quest’ultima è nullo mentre il lavoro della reazione orizzontale RA, di intensità RA incognita, è dato da
R Au A
(12.17)
La Relazione (12.5) e l’arbitrarietà di uA implicano allora
RA = 0
(12.18)
Analogo procedimento si può seguire per trovare uno sforzo interno (taglio, forza assiale, momento) in una qualsiasi sezione di una trave staticamente determinata.
A tal fine, si immagina di consentire una possibilità di moto relativo
nella sezione considerata: per esempio, ove si voglia determinare il valore del momento flettente si introduce una cerniera e si applicano due
coppie eguali e contrarie tali da ristabilire l’equilibrio. La relazione (12.5)
fornisce in tal caso il momento nella sezione considerata. Introducendo
invece un vincolo che consente traslazioni relative ortogonali all’asse della
trave (un cosiddetto glifo), si può ottenere la forza di taglio nella sezione.
Anche in questi casi si ottiene uno schema di corpo semilibero. Il consentire, infatti, nella sezione considerata un moto relativo coniugato con
lo sforzo interno che si vuole determinare corrisponde a “ridurre” il vincolo di incastro tra le due parti della trave che s’incontrano nella sezione
considerata, quindi a svincolare un grado di libertà, trasformando la trave
in un meccanismo.
482
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
ESEMPIO 12.02
Determinare il valore dell’intensità M del momento flettente
e della forza di taglio V in una sezione D della trave discussa
negli Esempi 5.01 e 12.01.
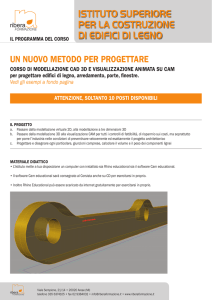
Si assuma che, come evidenziato nella Figura 12.6, la sezione D si trova a distanza 13 dal punto A.
Per determinare l’intensità MD del momento flettente in
D si inserisca nella sezione D della trave una cerniera. La
trave si trasforma così in un meccanismo con un unico grado
di libertà ed è quindi possibile assegnare atti di moto rigido
arbitrari, il generico dei quali determina la configurazione variata rappresentata nella Figura 12.6.
F
ϑ*
A
ϑ
D
B
C
1
3
2
3
Figura 12.6
La configurazione in Figura 12.6 può essere ottenuta imponendo una rotazione arbitraria (ma piccola per le ragioni
espresse in precedenza) q in B come descritto in figura. In
tal caso, lo spostamento verticale uD del punto D, ove è stata
inserita la nuova cerniera utile alla determinazione di MD, è
pari a
u D = q 23 2
=q 3
3
− M D 3q + F q
da cui si ottiene
MD = F
(12.23)
F
D
A
ϑ
ϑ
B
C
VD
(12.20)
1
3
(12.21)
6
(12.22)
VD
da cui si ottiene
q ∗ = 2q
=0
2
In maniera analoga, per determinare il taglio VD, si inserisca nella sezione D della trave un glifo (cioè un vincolo che
consente traslazione relativa delle due porzioni di trave concorrenti in D, ortogonalmente all’asse della trave). Si genera
così un meccanismo (con un solo grado di libertà), a cui si
possono imporre atti di moto rigido, il generico dei quali determina la configurazione variata descritta nella Figura 12.7,
ottenuta applicando la stessa rotazione q (piccola naturalmente perché valga l’approssimazione lineare fin qui utilizzata per la determianazione dello spostamento) sia in A sia
in B, di modo che i due tratti AD e DB siano paralleli. Di
conseguenza, lo spostamento verticale dell’estremo in D del
tratto AD è pari a 13 q , mentre l’analogo spostamento dell’estremo in D del tratto DB è pari a 23 q . Per ristabilire le
condizioni di equilibrio preesistenti all’introduzione del
glifo, è necessario applicare alle due facce delle porzioni di
trave concorrenti in D due forze uguali e contrarie, così come
indicato in Figura 12.7.
(12.19)
Siccome la cerniera in D rende solidali i due tratti di trave
AD e DB, nella cerniera in A si genera una rotazione q ∗ differente da q perché dfferente è la distanza del punto D dalle
due cerniere in A e B. Si deve avere, infatti
q∗
porzioni AD e DB quando non era introdotta la cerniera e permaneva il vincolo di continuità della trave. Le due coppie
compiono lavoro rispettivemente nelle rotazioni q ∗ e q , cosicchè, tenendo conto della (12.21), la Relazione (12.5) diventa nel caso specifico
2
3
Figura 12.7
Infine, lo spostamento verticale del punto C ove è applicata
la forza esterna è pari a
uC = q
2
Una volta introdotta la cerniera in D, per ristabilire l’equilibrio è necessario applicare alle due facce delle porzioni di
trave concorrenti in D due coppie eguali e contrarie d’intensità pari a MD. Esse corrispondono alle reazioni vincolari interne alla trave che impedivano la rotazione relativa delle due
In questo caso, la relazione (12.5) si può scrivere nel modo
seguente:
VD q
2
+ VD q − F q = 0
3
3
2
(12.24)
F
2
(12.25)
da cui si ottiene
VD =
483
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
484
Si noti che, ripetendo le operazioni sopra descritte per più sezioni, si possono tracciare per punti i diagrammi del taglio e del momento flettente;
questo procedimento risulta quindi particolarmente utile per carichi generici e vincoli multipli, e comunque quando le funzioni analitiche che
descrivono detti diagrammi non sono semplici. Si possono inoltre ritrovare tutte le proprietà dei diagrammi del taglio e del momento individuate
nel Capitolo 5.
Il Principio dei Lavori Virtuali
e le sue applicazioni
ESEMPIO 12.03
Determinare il momento flettente MD e il taglio VD nella sezione D della struttura rappresentata nella Figura 5.4(b), soggetta a un carico distribuito costante sul tratto HC, di lunghezza 23 , come indicato nella Figura 12.8.
p
ove x è calcolato a partire da C ed è quindi la distanza del
punto considerato da C.
Analogamente all’Esempio 12.02, per ristabilire l’equilibrio è necessario applicare alle due facce delle porzioni di
trave concorrenti in D due coppie eguali e contrarie d’intensità pari a MD, e ciascuna di esse compie lavoro nella rotazione q . Di conseguenza, la relazione (12.5) diventa
C
A
D
1
2
2q M D +
H
B
1
3
2q M D + q
Per calcolare il valore MD si inserisce in D una cerniera. In
tal modo la struttura diventa un meccanismo a un grado di libertà. Un generico atto di moto rigido virtuale permette di ottenere, quindi, la configurazione variata in Figura 12.9, ottenuta imponendo una rotazione q in A. Siccome la sezione D
è situata a metà del tratto AB, la rotazione in B è pari a q ,
mentre quella in C è pari a 12 q . Quest’ultimo valore si determina come nell’Esempio 12.2: la cerniera in H rende solidali
p
C
A
B
H
Figura 12.9
i tratti DH e HC, quindi lo spostamento uH in H, calcolato
con riferimento alla rotazione in B deve essere pari a quello
calcolato con riferimento alla rotazione in C, rotazione che
qui si indica con q¯ , di conseguenza, siccome q si immagina
essere piccolo, deve essere
¯ 2
=q
3
3
(12.26)
da cui
¯ = q
q
2
(12.27)
Per tal motivo, lo spostamento di un generico punto appartenente al tratto HC è pari a
q
x
2
(12.29)
ove il secondo addendo è il lavoro totale del carico uniformemente distribuito sul tratto HC. Il calcolo dell’integrale
permette di scrivere
2
3
Figura 12.8
uH = q
q
xdx = 0
2
p
0
1
2
D
2
3
(12.28)
p2
=0
9
da cui si ottiene
MD = −
p2
18
(12.30)
(12.31)
Si osservi che il valore dell’integrale in (12.29) è pari al lavoro che la risultante del carico distribuito su tratto HC compie nello spostamento del suo punto di applicazione, posto a
metà del tratto HC, a 13 da C. Lo spostamento verticale del
punto medio del tratto HC è infatti pari a 12 q × 13 = 16 q
mentre la risultante del carico uniformemente distribuito è
pari a 23 p, di conseguenza il lavoro della forza risultante è
dato da 23 p × 16 q = 19 q p2 .
Per determinare il taglio in VD si inserisce un glifo in D,
dando luogo a un meccanismo con un unico grado di libertà.
Si possono quindi assegnare generici atti di moto rigido la cui
tipica configurazione variata conseguente è analoga a quella
di Figura 12.7. Essa è ottenuta imponendo in A una rotazione
q e una rotazione uguale e contraria in B di modo che i tratti
AD e DB, entrambi di lunghezza 12 , siano paralleli. Di conseguenza, la cerniera in H, posto a distanza 13 da B, subisce
uno spostamento verticale pari a 13 q e determina in C una
rotazione pari a 12 q (si veda la (12.27)) cosicché lo spostamento di un generico punto nel tratto HC, posto a distanza x
da C, è dato dalla (12.28).
In questo caso la Relazione (12.5) diventa quindi
VD q
+ VD q +
2
2
2
3
p
0
da cui si ottiene
VD = − p
3
q
xdx = 0
2
(12.32)
(12.33)
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
12.3 IL PRINCIPIO DEI LAVORI VIRTUALI
PER ATTI DI MOTO DEFORMATIVO
12.3 Il Principio dei Lavori Virtuali
per atti di moto deformativo
Nel valutare gli sforzi interni, momento M, taglio V e sforzo normale N
nelle sezioni di una generica trave si sono sfruttate le caratteristiche geometriche della trave stessa. Si è cioè tenuto conto che la trave è un solido
prismatico con una dimensione molto più grande delle altre. Di conseguenza si può immaginare di assegnare in ciascun punto dell’asse della
trave informazioni su ciò che accade nella sezione ortogonale all’asse
stesso nel punto considerato. Questo punto di vista ha portato all’introduzione degli sforzi interni (momento, taglio e sforzo normale) come misure globali dello stato tensionale della sezione. Lo stesso punto di vista
può essere adottato ove si voglia valutare lo stato deformativo di una trave:
si possono cioè considerare gli spostamenti dei punti dell’asse della trave
e associare a ogni punto x informazioni su spostamenti, rotazioni
e deformazioni della sezione in x e del suo intorno. In questa trattazione
si introduce l’ipotesi che nell’atto di moto deformativo ogni sezione della
trave rimanga piana, ipotesi detta delle sezioni piane.
Sia data per esempio una trave che nella configurazione di riferimento
sia ad asse rettilineo, di lunghezza , coincidente con l’intervallo [0, ]
dell’asse x nel piano xy. Su [0, ] si possono quindi definire tre funzioni
continue e derivabili i cui valori nel generico x sono indicati rispettivamente da ux(x), uy(x) e q(x) e rappresentano, i primi due, le componenti
lungo gli assi x ed y, rispettivamente, dello spostamento del punto x mentre, il terzo, la rotazione della sezione. L’analisi di una trave deformabile
è quindi ridotta a uno schema meccanico monodimensionale: le funzioni
ux, uy e q che individuano la configurazione deformata della trave sono
infatti solo funzioni di x.
Si consideri ora una sezione in x e una, a essa parallela nella configurazione rettilinea di riferimento, in x + dx . Le due sezioni possono (a)
allontanarsi l’una rispetto all’altra, pur rimanendo parallele, (b) scorrere
reciprocamente, pur rimanendo parallele, (c) ruotare l’una relativamente
all’altra.
Si indichi quindi con (x)dx l’allontanamento tra le due sezioni in
direzione x, con g(x)dx lo scorrimento tra le due sezioni in direzione y
e con x(x)dx la rotazione relativa tra le due sezioni ( = x è la deformazione lineare unitaria definita al Paragrafo 2.2; g = gx y è la deformazione angolare di scorrimento definita nel Paragrafo 2.14; x = r1 è la curvatura flessionale della trave, introdotta nel Paragrafo 4.4).
Si dice che la terna {ux, uy, q} genera una deformazione congruente se
(x) = u x (x) ,
g (x) = u y (x) − q (x) ,
x (x) = q (x) (12.34)
ove l’apice indica derivata rispetto ad x.
Al deformarsi della trave, gli sforzi interni compiono lavoro nelle deformazioni pertinenti, punto per punto, cosicché il lavoro totale, detto interno
perché dovuto a sforzi interni alla trave, e indicato con L iv , è dato da
L iv =
N + V g + Mx dx
(12.35)
0
Esso è virtuale perché , g e x non sono necessariamente le misure della
deformazione reale ma sono, più in generale, misure di una deformazione
arbitraria, compatibile con il vincolo interno di continuità della trave.
Si consideri ora la trave caricata da un carico trasversale distribuito
p(x), un carico longitudinale q(x) e una distribuzione continua di momento flettente m(x); inoltre si abbiano forze e coppie applicate in , in-
485
m
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
486
Il Principio dei Lavori Virtuali
e le sue applicazioni
dicate con Fx , Fy ed M rispettivamente, e in 0 ove sono indicate con
Fx0 , Fy0 ed M0 (per semplicità le reazioni di eventuali vincoli in e 0 sono
incluse tra le forze F e le coppie M). Non si considerano vincoli di sorta,
per semplicità. Il lavoro virtuale delle forze esterne, indicato con L ev , è
quindi pari a
e
Lv =
(qu x + pu y + mq)dx + Fx u x () + Fy u y () + M q()+
0
+ Fx0 u x (0) + Fy0 u y (0) + M0 q (0)
(12.36)
Una delle possibili formulazioni del principio dei lavori virtuali per travi
deformabili è l’enunciato presentato nel seguito.
1. Dato un sistema di forze esterne e sforzi interni (reali), se per qualsiasi deformazione congruente {ux, uy, q} (virtuale)
L ev − L iv = 0
(12.37)
1. allora la trave è in equilibrio.
Per dimostrare la validità dell’enunciato precedente, si osservi innanzitutto che se un’arbitraria deformazione virtuale è congruente, allora, grazie alla (12.34), l’espressione del lavoro virtuale interno (12.35) diventa
i
Lv =
N u x + V u y − q − Mq dx
(12.38)
0
d’altra parte, però,
N u x = (N u x ) − N u x
V u y
(12.39)
e analoghe relazioni valgono per
ed Mq , inoltre
(N u x ) dx = N () u x () − N (0) u x (0)
(12.40)
0
perché è semplicemente l’integrale della derivata della funzione N u x . Relazioni simili valgono per (V u y ) e (Mq) . Di conseguenza, il lavoro interno può essere scritto nel modo seguente:
L iv = N () u x () − N (0) u x (0) + V () u y () − V (0) u y (0) −
−M () q () + M (0) q (0) − N u x + V u y − V q − M q dx
(12.41)
0
Tenendo conto delle relazioni (12.36) e (12.41), la (12.37) diventa
0
q + N u x + p + V u y + m + V − M q dx+
+ Fx − N () u x () + Fy − V () u y () +
+ M + M () q () + Fx0 + N (0) u x (0) +
+ Fy + V (0) u y (0) + M0 − M (0) q (0) = 0
(12.42)
Infine, siccome la (12.42) deve essere valida per qualsiasi deformazione
congruente, cioè per qualsiasi scelta di ux, uy e q congruenti, visto che la
(12.42) è lineare in ux, uy e q, devono annullarsi i fattori che moltiplicano
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
ux, uy e q, quindi, in ciascun punto dell’asse della trave devono essere verificate le relazioni
N + q = 0
(12.43)
V + p = 0
(12.44)
M − V − m = 0
(12.45)
mentre sulle facce terminali in x = e x = 0 devono essere verificate le
condizioni al contorno
Fx = N ()
(12.46)
Fy = V ()
(12.47)
M = −M ()
(12.48)
Fx0 = −N (0)
(12.49)
Fy = −V (0)
(12.50)
M0 = M (0)
(12.51)
che sono le condizioni di equilibrio della trave deformabile considerata.
In particolare la (12.43) rappresenta l’equilibrio puntuale alla traslazione
orizzontale, la (12.44) l’equilibrio alla traslazione verticale e la (12.45)
l’equilibrio alla rotazione. Le (12.46)-(12.51) sono le condizioni al contorno.
Una formulazione alternativa del PLV è l’enunciato qui di seguito.
2. Dato un campo di spostamenti e rotazioni (reali) lungo la trave, se per
ogni sistema di forze esterne e sforzi interni (virtuali) tra loro equilibrati la relazione (12.37) è verificata, allora il campo di spostamenti
e rotazioni assegnato è congruente.
Conseguenza degli enunciati 1. e 2. è l’enunciato alternativo.
3. Per ogni campo di spostamenti e rotazioni congruente e per ogni sistema di forze esterne e sforzi interni equilibrati, la relazione (12.37)
è verificata.
Come si vedrà nei paragrafi che seguono, ove si voglia valutare l’equilibrio di un dato sistema di carichi esterni e sforzi interni, l’utilizzo del
PLV consiste nello scegliere opportunamente campi virtuali congruenti di
spostamenti e rotazioni e applicare la (12.37); viceversa, ove si voglia valutare la congruenza di un sistema di spostamenti, si scelgono sistemi di
forze, sforzi e momenti equilibrati e si applica a essi la (12.37).
12.4 IL PLV NELLA RICERCA DI SPOSTAMENTI IN TRAVI
ELASTICHE CARICATE TRASVERSALMENTE
Per semplicità, la trattazione di questo paragrafo viene limitata alle travi
rettilinee caricate da forze “trasversali” (cioè ortogonali all’asse della
trave) e alle deformazioni elastiche dovute al momento flettente. Nei Paragrafi 9.1-9.3 si è visto come si scrive l’“equazione della linea elastica”,
cioè l’equazione differenziale che fornisce, data la funzione momento flettente M(x), la deformata y(x), ovvero lo spostamento trasversale u y (x)
dell’asse della trave. In molte circostanze, però, non è necessario deter-
12.4 Il PLV nella ricerca di spostamenti
in travi elastiche caricate trasversalmente
487
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
488
Il Principio dei Lavori Virtuali
e le sue applicazioni
minare l’intera deformata della trave, bensì conoscere solo il valore dello
spostamento in alcuni punti, spostamento provocato dall’applicazione
di un dato carico reale. All’uopo il PLV si dimostra particolarmente efficiente. In queste applicazioni si sceglie come campo di spostamenti e
deformazioni quello effettivo (reale) congruente e un sistema (arbitrario) fittizio (virtuale) di forze equilibrate scelto in modo che la (12.37)
contenga la grandezza che si vuole determinare. Per esempio, se si desidera calcolare lo spostamento verticale in una sezione, indicato con
u y (x̄), ove x̄ è la posizione della sezione in esame, si introduce un sistema equilibrato fittizio costituito da una singola forza F* (spesso chiamata carico esploratore) avente la direzione dello spostamento incognito e intensità di valore arbitrario assegnato, dalle corrispondenti
reazioni vincolari (irrilevanti nei calcoli se i vincoli sono rigidi) e dagli sforzi interni N*, V* ed M*. Così facendo la Relazione (12.37) diventa
∗
F ∗ u y (x̄) =
N + V ∗ g + M ∗ x dx
(12.52)
0
Il sistema di carico qui considerato (l’unica forza F*) non determina sforzo
normale, inoltre, quale approssimazione verificata di frequente nelle applicazioni pratiche, si ipotizza qui di seguito che la deformabilità a scorrimento della trave sia trascurabile, sia quindi trascurabile il termine V ∗ g
punto per punto. Di conseguenza la (12.52) si riduce a
F ∗ u y (x̄) =
M ∗ xdx
(12.53)
0
Siccome il sistema di carico è la sola forza F*, il valore del momento M*
in qualsiasi sezione dipende linearmente dal modulo F* della forza virtuale considerata. Di conseguenza, si può scegliere F ∗ = 1. La (53) si riduce quindi a
u y (x̄) =
M ∗ xdx
(12.54)
0
ove M* è ora il momento generato dalla forza fittizia di modulo unitario.
Il primo membro della (12.54) è la grandezza incognita. Le quantità sotto
il segno di integrale al secondo membro sono note: infatti è possibile determinare la distribuzione del momento flettente reale M(x) indotto dai
carichi esterni. D’altra parte x(x) è la curvatura flessionale reale della
trave, quella prodotta dal carico reale applicato alla trave stessa, quindi
se il comportamento della trave è puramente elastico lineare è possibile
far uso della (4.21) che lega il momento reale alla curvatura x (indicata
nella (4.21) con 1/r), cioè della relazione costitutiva
x=
M
EI
La Relazione (12.54) diventa quindi
M
u y (x̄) =
M∗
dx
EI
0
(12.55)
(12.56)
che è la relazione che permette di determinare il valore u y (x̄) cercato: in
essa, naturalmente, il primo termine è da intendersi come 1 × u y (x̄), rappresentando 1 il valore unitario della forza.
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
Infine, se vi sono aggiuntive variazioni di curvatura indotte da variazioni
termiche T , distribuite “a farfalla” lungo ogni generica sezione di altezza h, o da distorsioni flessionali anelastiche xa assegnate a priori, nell’ambito delle limitazioni della teoria linearizzata che qui si discute, esse
debbono essere aggiunte alla curvatura elastica e si ha
x = xe + xt + xa
12.4 Il PLV nella ricerca di spostamenti
in travi elastiche caricate trasversalmente
489
(12.57)
ove
xe =
M
,
EI
xt = a
T
h
(12.58)
con α il coefficiente di dilatazione termica.
Ove in luogo di u y (x̄) si voglia calcolare la rotazione q(x̄) nello stesso
punto basta applicare, per le stesse ragioni che hanno portato alla (12.56),
una coppia unitaria M in x̄ cosicché la (12.56) diventa
M
q (x̄) =
M∗
dx
(12.59)
E
I
0
ove M* è questa volta il momento indotto sulla trave da M e il primo termine dell’Equazione (12.59) è da intendersi come 1 × q(x̄).
In tutti gli esempi successivi si immagina che ogni trave sia omogenea e a sezione costante: il prodotto EI è quindi considerato costante.
ESEMPIO 12.04
Si determini lo spostamento verticale e la rotazione nel punto
A della trave AB discussa nell’Esempio 9.01.
Si ricorda che la trave è ad asse rettilineo, di lunghezza ,
incastrata in B e caricata da una forza trasversale F, di intensità F , applicata in A (nell’Esempio 8.01 la forza è indicata con P , lettera che è stata già utilizzata in questo capitolo per indicare un generico punto del corpo e che quindi
viene sostituita con F). La struttura è staticamente determinata; la distribuzione reale di momento flettente è data dalla
(9.7), cioè da
M = −F x
(12.60)
ove l’origine dell’asse x è collocata in A e l’asse stesso coin-
F
A
cide con quello della trave. Si considera poi una forza verticale F* di intensità unitaria, orientata verso l’alto, nel verso
che si è scelto positivo nella Figura 9.11, in quello stesso senso
in cui il lavoro nello spostamento u y sarebbe positivo se lo
spostamento stesso risultasse verso l’alto. Per essa il momento
“fittizio” è dato da
M∗ = 1 × x = x
quindi il valore dello spostamento verticale si può determinare tramite (12.56) e si ha
u y ( A) = −
Figura 9.9 (ripetuta)
0
F 3
F 2
x dx = −
EI
3E I
(12.62)
valore calcolato tramite la linea elastica nell’Esempio 9.01.
Per calcolare la rotazione in A si applica una coppia M
unitaria agente in senso antiorario in A, lo stesso senso che
permette di affermare che il lavoro 1 × q( x̄ ) è positivo quando
la rotazione si sviluppa nel senso antiorario. Il momento “fittizio” indotto da M è pari a
M ∗ = −1
B
L
(12.61)
(12.63)
di conseguenza la relazione (12.59) permette di scrivere
q ( A) =
0
F
F 2
xdx =
EI
2E I
(12.64)
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
ESEMPIO 12.05
Determinare lo spostamento in mezzeria della trave AB discussa nell’Esempio 9.02 (cioè nel punto indicato con C nella
Figura 9.15, punto posto a distanza 12 da A). La trave AB ha
lunghezza , è incernierata in A e appoggiata su di un carrello
in B; un carico uniforme trasversale è applicato da A a B e ha
intensità unitaria p (si veda la Figura 9.12 e si tenga conto di
come la lunghezza della trave e il carico trasversale siano indicati qui con lettere differenti).
Il momento reale lungo l’asse della trave è dato dalla Formula (9.12) che qui si riscrive con le notazioni tipiche di questo capitolo:
M =
1
1
px − px 2
2
2
(12.65)
Si applichi ora in C una forza F* verticale, di intensità unitaria, diretta verso l’alto, lo stesso verso che (nelle convenzioni adottate in precedenza sui versi positivi) renderebbe positivo il termine sinistro della (12.53) e quindi della (12.56)
se lo spostamento in C avvenisse verso l’alto. Il momento virtuale (fittizio) M* è dato quindi da
∗
M =
−1× x2 = − x2
−1×
2
− x =−
2
−x
per 0 ≤ x ≤ 2 ,
per
2
di conseguenza dalla (12.56) si ottiene
u y (C ) =
M
dx =
EI
M∗
0
2
=−
EI
=−
2 p4
EI
2
0
1
1
px − px 2
2
2
1
1
−
96
256
=−
x
dx =
2
(12.67)
5 p4
384
Lo spostamento è quindi verso il basso ed è inoltre il massimo spostamento della trave stessa a causa della simmetria
della struttura. È inoltre la simmetria di (12.66) che permette
di scrivere la seconda eguaglianza nella (12.67), come si può
facilmente osservare se si svolgono pedissequamente tutti i
calcoli che si sviluppano sostituendo le Relazioni (12.65) e
(12.66) in (12.56).
(12.66)
<x ≤
12.5 IL PLV NELL’ANALISI DI STRUTTURE ELASTICHE
STATICAMENTE INDETERMINATE
Il principio dei lavori virtuali è altresì uno strumento essenziale per la determinazione delle reazioni “sovrabbondanti” nelle strutture staticamente
indeterminate.
Nella procedura descritta nel seguito, detta metodo delle forze, si considera come campo di spostamenti e deformazioni quello reale (nel quale
si fanno comparire come incognite iperstatiche le reazioni vincolari sovrabbondanti) e tanti sistemi fittizi equilibrati quante sono le incognite
iperstatiche. I passi della procedura sono descritti nel seguito.
La procedura è basata sulla formulazione 1. del PLV ed è esemplificata nel seguito.
(a) Si sopprime un numero di vincoli (esterni o interni) pari al numero
dei vincoli sovrabbondanti della struttura, sostituendo a essi le reazioni vincolari incognite. È essenziale che la scelta dei vincoli da sopprimere sia tale che, una volta tolti, la struttura risultante sia staticamente determinata (isostatica). È anche essenziale verificare che i
vincoli rimanenti siano ben posti e che nessuna parte della struttura
si riduca a meccanismo. La struttura resa così isostatica viene detta
struttura principale. La struttura reale è del tutto equivalente alla struttura principale caricata dalle forze esterne e dalle incognite iperstatiche, ove siano soddisfatte le condizioni imposte dai vincoli soppressi:
imponendo queste ultime, che sono condizioni di congruenza, si ottengono tante equazioni (che con le ipotesi introdotte sono lineari)
quante sono le incognite e si ha quindi un sistema che – salvo casi
degeneri – ammette una e una sola soluzione.
490
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
(b) La struttura principale, caricata dalle sole forze esterne, viene detta
schema 0; per esso si determinano le distribuzioni di momento M 0,
taglio V 0 e sforzo normale N 0, ove l’apice 0 indica che sono gli sforzi
interni dello schema 0. In genere il contributo del taglio viene trascurato e tale ipotesi sarà adottata nel seguito.
(c) Per semplicità di trattazione si fa inizialmente riferimento al caso in
cui la struttura di partenza abbia un solo vincolo sovrabbondante, e
quindi si abbia una sola incognita iperstatica X; sulla struttura principale una forza esterna (o una coppia) con la direzione e il verso
dell’incognita iperstatica X, ma intensità unitaria. Si chiama schema
1 la struttura in queste condizioni; per essa si determinano le distribuzioni equilibrate di momento M1, taglio V1 e sforzo normale N1,
ove l’apice 1 indica che sono gli sforzi interni dello schema pertinente.
(d) Il momento flettente nella struttura reale è dato da
Mr = M0 + X M1
(12.68)
(d) Si è già osservato infatti, nel dedurre la (12.54) dalla (12.53), che, nel
caso in cui una forza concentrata (o una coppia) sia applicata a una
trave, punto per punto il valore del momento è proporzionale all’intensità della forza stessa, quindi il momento determinato dalla reazione vincolare incognita di intensità X è proporzionale ad M1 tramite
X, che è l’incognita da determinare. È inoltre possibile esprimere il
momento totale Mr come somma di quello dovuto ai carichi esterni
M 0 e del momento XM1 indotto da X perché si può applicare il principio di sovrapposizione degli effetti.
(e) Per ottenere l’equazione di congruenza che fornisce l’incognita X si
applica il PLV al campo congruente di spostamenti e deformazioni
reali e al sistema fittizio equilibrato, costituito dallo schema 1. Se il
vincolo sopresso è rigido, il lavoro virtuale esterno compiuto dalla
forza X = 1 è nullo mentre nel lavoro interno compaiono M1 e N1 che
compiono lavoro nella deformazione reale della trave. Pertanto, ipotizzando, come già fatto nel Paragrafo 12.4, che l’unica deformazione
significativa sia quella flessionale, la (12.37) diventa
Mr
M1
dx = 0
(12.69)
EI
0
(e) L’incognita iperstatica compare esplicitamente nella (12.69) se per Mr
si introduce l’espressione (12.68). Nel caso in cui vi sia nella struttura reale un cedimento del vincolo, cedimento che può essere elastico o anelastico, il lavoro esterno della forza X = 1 è diverso da zero
e la (12.37) fornisce la relazione
Mr
e
Lv −
M1
dx = 0
(12.70)
EI
0
(e) che estende la (12.69) al caso in cui il vincolo soppresso non sia rigido.
(f) Laddove i vincoli sovrabbondanti siano più d’uno e le incognite iperstatiche siano per esempio s, il momento reale sulla struttura è pari a
Mr = M0 +
s
i=1
Xi Mi
(12.71)
12.5 Il PLV nell’analisi di strutture
elastiche staticamente indeterminate
491
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
492
Il Principio dei Lavori Virtuali
e le sue applicazioni
(g) e si scrivono s equazioni (12.69), la i-esima di esse data da
s
i 1
0
i
i
M
X M dx = 0
M +
(12.72)
EI
0
i=1
(g) Si ottiene così un sistema di equazioni algebriche che permette di determinare le Xi. Nel caso in cui uno o più vincoli soppressi non siano
rigidi, è necessario modificare la (12.72) introducendo, come nella
(12.70), il lavoro esterno L ev (X i ) che la forza (o la coppia) unitaria
X i = 1 compie nello spostamento reale del suo punto di applicazione.
(g) Ove vi sia contributo della deformabilità assiale, è necessario considerare l’integrale
Nr
Mr
dx
N1
+ M1
(12.73)
EA
EI
0
in luogo del membro destro della (12.69). In questo caso Nr è lo sforzo
normale reale ed è dato da
Nr = N0 + X N1
(12.74)
per le stesse ragioni che portano a scrivere la (68). Nella (12.74) N1
è lo sforzo normale della forza unitaria inserita nello schema fittizio
al posto dell’incognita iperstatica di intensità incognita X. Nel caso in
cui siano presenti s incognite iperstatiche si ha
Nr = N0 +
s
X iJ N i
(12.75)
i=1
e ovviamente, anche in questo caso, si scrivono s equazioni (12.69),
la i-esima di esse data da
i s
s
N
Mi
0
i i
0
i
i
X N +
X M dx = 0 (12.76)
N +
M +
EI
0 EA
i=1
i=1
ove i vincoli soppressi siano tutti rigidi. Nel caso in cui uno o più vincoli soppressi non siano rigidi, la (12.76) deve essere modificata nel
senso della (12.70).
Nel caso in cui la deformabilità dovuta allo scorrimento non sia trascurabile, la generalizzazione delle relazioni precedenti è immediata: si debbono aggiungere termini del tipo V 1 V r /(G A), con V r lo sforzo di taglio
reale dato da V r = V 0 + X V 1 .
ESEMPIO 12.06
Si consideri la struttura rappresentata nella Figura 9.24(a) in
cui una trave AB di lunghezza è incastrata in A e appoggiata in B su di un carrello. La struttura è staticamente indeterminata: vi sono quattro vincoli semplici (3 è infatti la molteplicità dell’incastro, a cui si aggiunge il carrello in B che è
un vincolo semplice) mentre la trave ha solo tre gradi di libertà nel piano. Per determinare tutte e quattro le reazioni vincolari si utilizza la procedura riassunta in precedenza.
p
A
B
( )
Figura 9.24a (ripetuta)
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
Il primo passo è la scelta della struttura principale, scelta che
non è unica e che deve essere guidata esclusivamente da motivi di semplicità: differenti schemi 0 possono richiedere un
onere di calcolo anche significativamente differente. Nel caso
qui analizzato si può (1) eliminare il carrello in B oppure (2)
ridurre il vincolo di incastro in A inserendo una cerniera oppure un glifo verticale (un glifo orizzontale permetterebbe
spostamenti orizzontali arbitrari di tutta la trave e non è da
considerarsi). Le opzioni nei punti (1) e (2) sono tutte possibili, esse però coinvolgono differenti oneri di calcolo. È facile verificare che la soluzione meno onerosa è la (1), per la
quale il sistema principale è semplicemente una mensola che
sopporta un carico trasversale uniformemente distribuito
lungo la trave la cui intensità è qui indicata con p. In questo
caso, rispetto a un sistema di riferimento per cui l’asse x ha
origine in B ed è orientato verso A, e l’asse y è orientato verso
l’alto, la distribuzione del momento flettente M 0 lungo l’asse
(Figura 12.10) è data da
M0 = −
px 2
2
Lo schema fittizio è costituito dalla mensola di cui sopra caricata da un’unica forza verticale, applicata in B, con verso
nella direzione positiva dell’asse y, di intensità unitaria. Tale
forza ha la stessa direzione e lo stesso verso che si presume
debba avere la reazione vincolare di intensità incognita X che
si presuppone debba avere il carrello che è stato soppresso in
B (Figura 12.10).
Di conseguenza M1 è dato da
M1 = 1 × x = x
quindi
(12.78)
px 2
+ Xx
2
Mr = M0 + X M1 = −
(12.79)
Il lavoro esterno è il lavoro della forza fittizia unitaria introdotta al posto della reazione vincolare X per lo spostamento
reale del suo punto di applicazione, cioè del punto B. Data la
presenza del carrello in B nella struttura originaria di Figura
9.24(a), lo spostamento reale di B è nullo, quindi
L ev = 0
(12.77)
(12.80)
Il lavoro interno è dato da
L iv =
p
A
0
1
=
EI
B
=
M1
Mr
dx =
EI
x
0
px 2
Xx −
2
dx =
(12.81)
X 3
p4
−
3E I
8E I
Di conseguenza, la (12.37) fornisce
X =
p2
M0
2
Figura 12.10
3
p
8
(12.82)
Il fatto che il valore dell’incognita X sia positivo implica che
la scelta originaria del verso per la reazione vincolare è stata
corretta, se il valore di X fosse stato negativo, il verso reale
della reazione sarebbe stato opposto a quello scelto a priori.
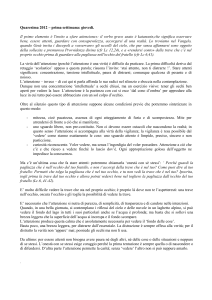
ESEMPIO 12.07
Si consideri la struttura di Figura 12.11. La trave orizzontale
AB di lunghezza è incastrata in A mentre nell’estremo B vi
è una cerniera che la collega con un’asta verticale BC, anch’essa di lunghezza , incernierata nell’estremo C.
Non vi sono forze esterne applicate. L’asta BC è soggetta
a una dilatazione termica aT > 0 , uniforme lungo l’asse.
La struttura è evidentemente una volta iperstatica. Per ottenere un adeguato schema principale si potrebbe scegliere di
sostituire l’incastro con una cerniera (la struttura si ridurrebbe
in questo caso a una versione del cosiddetto “arco a tre cerniere”. Si può però ridurre l’onere di calcolo tenendo conto
delle peculiarità della struttura considerata. La trave BC è incernierata ai suoi estremi e non è soggetta a carichi trasversali, quindi, nelle condizioni della struttura rappresentata nella
Figura 12.11, essa subisce solo sforzo normale e può essere
considerata un pendolo, cioè ha di per se stessa la natura di
un vincolo semplice e può essere trattata come tale.
B
A
T > 0
Figura 12.11
C
493
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
La struttura principale più vantaggiosa dal punto di vista dei
calcoli è quindi costituita dalla sola trave AB incastata in A.
L’incognita iperstatica X è la reazione che il pendolo BC esercita in B e che coincide inoltre con lo sforzo normale in BC.
Lo schema 0 è dato dalla sola mensola AB priva di qualsiasi
carico esterno, quindi
M0 = 0
(12.83)
Lo schema 1 è rappresentato in Figura 12.12. La distribuzione
del momento M1, rispetto a un sistema di riferimento in cui
l’origine dell’asse x coincide con B, è data da
M1 = 1 × x = x
(12.84)
B
A
1
1
Di conseguenza,
Mr = X M1
(12.85)
e il lavoro interno è dato da
L iv
=
0
X 3
X 2
x dx =
EI
3E I
Lo spostamento del punto B della struttura reale non è nullo
perché, contrariamente ai casi discussi in precedenza, il vincolo B non è rigido, ma si sposta per la deformazione del pendolo BC, e precisamente subisce (a) uno spostamento elastico
dovuto alla compressione esercitata da X e dato da X /( EA)
(cioè dall’integrale da B a C della deformazione assiale
X /( E A) ) e (b) uno spostamento dovuto alla dilatazione termica e pari a aT (anche qui si tratta dell’integrale della
deformazione termica costante aT , con α il coefficiente di
dilatazione termica, lungo la trave). Per il principio di sovrapposizione degli effetti, lo spostamento totale del punto B
è quindi pari a
u y (B) = aT −
(12.87)
aT −
X
EA
(12.88)
Infine la (12.37) fornisce
X =
Figura 12.12
X
EA
Il segno meno è dovuto al fatto che sul pendolo agisce la forza
uguale e opposta all’incognita iperstatica (per assicurare le
condizioni di equilibrio) e quindi essa comprime il pendolo
dando luogo a un accorciamento. La variazione positiva di
temperatura provoca invece una dilatazione del pendolo.
Il lavoro esterno della forza X = 1 agente in B è quindi
pari a
−1 ×
C
(12.86)
aT
1
2
+
EA
3EI
(12.89)
12.6 IL PLV NELLA RICERCA DI SPOSTAMENTI IN STRUTTURE
ELASTICHE STATICAMENTE INDETERMINATE
Per trovare spostamenti o rotazioni di sezioni di strutture iperstatiche si
può procedere in maniera del tutto analoga a quanto descritto nel Paragrafo 12.4. È necessario trovare innanzitutto le incognite iperstatiche e
quindi gli sforzi interni dati dalle (12.71), (12.75); si applica poi il carico
esploratore corrispondente alla grandezza che si vuole determinare e si
impone la (12.52) o la (12.54).
Da notare che per la validità del PLV il campo di sforzi interni deve
essere soltanto equilibrato: si può quindi utilizzare uno qualsiasi tra gli
infiniti campi equilibrati della struttura iperstatica. Per economia di calcoli, spesso si sceglie il campo ottenuto imponendo il carico esploratore
sulla struttura principale, che è stato già utilizzato nella ricerca delle incognite iperstatiche attraverso il sistema (12.72) o quello dato da (12.76),
oppure le loro modifiche necessarie in presenza di vincoli non rigidi.
494
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
RIEPILOGO
DEL CAPITOLO 12
Riepilogo del Capitolo 12
In questo breve capitolo si è introdotto un principio generale della Meccanica, il Principio dei Lavori Virtuali (PLV), e si è mostrato come esso
può essere usato per risolvere vari problemi. Per semplicità, si è limitata la trattazione a solidi con una dimensione prevalente (travi) e a
problemi piani, ma gli esercizi proposti ne consentono l’ estensione a
problemi nello spazio.
Nel Paragrafo 12.02 si è enunciato il Principio per atti di moto rigido
ed è stato mostrato come esso può essere utilizzato per trovare le reazioni vincolari e gli sforzi interni in strutture isostatiche.
PLV per atti di moto rigido
Il PLV è stato esteso ad atti di moto che comprendono deformazioni
nel Paragrafo 12.03, e nel Paragrafo 12.04 si è quindi mostrato come
in questa forma esso può essere usato per trovare spostamenti e rotazioni in punti di travi elastiche.
PLV per atti di moto deformativo
Infine, nei Paragrafi 12.05 e 12.06 si sono trattate travi staticamente
indeterminate (o iperstatiche) e si è mostrato come esse possono essere affrontate mediante il PLV.
Il PLV e le strutture iperstatiche
495
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
496
Esercizi
ESERCIZI
ESERCIZI RELATIVI AI PARAGRAFI 12.1-12.2
Molti degli esercizi dei Capitoli 1, 2, 3, 5, 9, 11 possono essere affrontati e
risolti mediante il Principio dei Lavori Virtuali (PLV), talvolta con un
notevole risparmio di tempo. Nel seguito se ne indicano soltanto alcuni; per
le eventuali soluzioni fare riferimento ai singoli capitoli.
12.1, 12.2, 12.3, 12.4 e 12.5 Risolvere utilizzando il PLV gli Esercizi
1.4, 1.6, 1.7, 1.8, 1.9 (Suggerimento: sopprimere un collegamento e proiettare la
corrispondente reazione incognita sulla direzione dello spostamento del suo punto
di applicazione.)
12.6, 12.7, 12.8, 12.9, 12.10, 12.11, 12.12, 12.13, 12.14 e 12.15 Utilizzando ripetutamente il PLV, disegnare per punti i diagrammi del taglio e del
momento flettente nelle travi degli Esercizi 5.1, 5.2, 5.3, 5.4, 5.5, 5.6, 5.13, 5.14,
5.15, 5.16.
12.16 Utilizzando il PLV, determinare la coppia torcente (a) nell’ incastro
A dell’Esercizio 3.16 e (b) nell’ incastro D dell’Esercizio 3.18 (Suggerimento: sopprimere il vincolo alla rotazione nell’incastro e sostituirlo con la coppia incognita.)
ESERCIZI RELATIVI AI PARAGRAFI 12.3-12.4
12.17, 12.18, 12.19, 12.20, 12.21, 12.22 e 12.23 Utilizzando il PLV,
rispondere alle domande (b) e (c) degli Esercizi 9.1, 9.2, 9.3, 9.4, 9.6, 9.7.
12.24, 12.25, 12.26 e 12.27 Risolvere, utilizzando il PLV, gli Esercizi
8.10, 8.11, 8.13, 8.18.
12.28, 12.29 e 12.30 Risolvere, utilizzando il PLV, gli Esercizi 2.19, 2.35,
2.36 (Suggerimento: tener conto del lavoro interno dovuto all’ allungamento degli elementi interessati.)
12.31
Risolvere, utilizzando il PLV, l’Esercizio 2.40.
12.32 Scrivere l’espressione del lavoro interno in un albero omogeneo di
sezione costante, soggetto al momento torcente T, con modulo di rigidità G e sezione (a) circolare piena di raggio c, (b) circolare cava con raggio interno c1 ed
esterno c2, (c) quadrata b × b , (d) rettangolare b × 2b , (e) rettangolare b × 10b .
12.33 Risolvere, utilizzando il PLV, l’Esercizio 3.119 (Suggerimento: tener conto del lavoro interno connesso con la deformazione torsionale.)
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
ESERCIZI RELATIVI AI PARAGRAFI 12.5-12.6
Esercizi
12.34, 12.35, 12.36, 12.37, 12.38 e 12.39 Risolvere, utilizzando il PLV,
gli Esercizi 9.14, 9.15, 9.16, 9.17, 9.40, 9.41.
12.40 Utilizzando il PLV, rispondere alla domanda (a) degli Esercizi 3.51
e 3.52 (Suggerimento: eliminare il vincolo alla rotazione in uno dei due supporti,
e tener conto del lavoro interno connesso con la deformazione torsionale.)
ESERCIZI DI RIEPILOGO
12.41 e 12.42 Per la trave prismatica mostrata, determinare lo spostamento del punto D.
w
P
A
A
B
D
L/2
B
D
L/2
L/2
Figura E12.41
L/2
Figura E12.42
12.43 e 12.44 Per la trave prismatica mostrata, determinare lo spostamento del punto D.
P
w
D
A
L/2
L/2
E
A
B
E
B
D
L/2
L/2
L/2
a
Figura E12.44
Figura E12.43
12.45 Per trave e carico mostrati, determinare lo spostamento del punto
B. Usare E 200 GPa.
18 kN/m
8 kN
M0
C
A
A
B
1m
C
B
W250 22.3
1.5 m
L/2
2.5 m
Figura E12.45
12.46 Per la trave prismatica mostrata in figura, determinare la rotazione
nel punto B.
Figura E12.46
L/2
497
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
498
12.47 Per la trave e il carico mostrati in figura, determinare lo spostamento
del punto B. Utilizzare E 200 GPa.
Esercizi
5 kN/m
40 mm
A
80 mm
B
C
160 kN
2.4 m
4 kN
0.6 m
2.4 m
Figura E12.48
B
2580 mm2
12.48 Per trave e carico mostrati, determinare la rotazione nell’estremo A.
Usare E 200 GPa.
12.49 e 12.50 Ciascun elemento della struttura reticolare mostrata in fi-
1930 mm2
C 200 kN gura è realizzato in acciaio e ha sezione trasversale di area come indicato. Uti-
lizzando E = 200 GPa, determinare gli spostamenti indicati.4
12.49 Lo spostamento verticale della cerniera C.
350 kN
12.50 Lo spostamento orizzontale della cerniera C.
0.75 m
D
B
4.8 m
0.9 m
Figura E12.47
0.75 m
W310 74
C
A
3870 mm2
12.51 e 12.52* Gli elementi della struttura reticolare mostrata sono tutti
di acciaio e hanno sezione trasversale dell’area mostrata. Usando E 200 GPa,
determinare lo spostamento indicato.4
12.51 Lo spostamento verticale della cerniera C.
12.52* Lo spostamento orizzontale della cerniera C.
6 ft
Figura E12.49 ed E12.50
1.6 m
A
A
1.2 m
1.5 m
1200 mm2
B
C
1.2 m
1.5 m
1800 mm2
B
210 kN
C
D
4.8 kN
2m
Figura E12.51 ed E12.52
2.5 m
Figura E12.53 ed E12.54
12.53 e 12.54 Gli elementi della struttura reticolare mostrata sono tutti
di acciaio ed hanno sezione trasversale di area 500 mm2. Usando E = 200 GPa
determinare lo spostamento indicato.4
12.53 Lo spostamento verticale della cerniera B.
12.54 Lo spostamento orizzontale della cerniera B.
4
Negli Esercizi 12.49-12.54 e 12.58-12.63, usare una formula analoga alla (12.54), ottenuta
ponendo M ∗ = V ∗ = 0 nella (12.52).
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed
Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek
Copyright © 2010 - The McGraw-Hill Companies srl
12.55* Due aste AB e BC con la stessa rigidità flessionale EI sono saldate
in B. Per il carico mostrato, determinare (a) lo spostamento del punto C, (b) la
rotazione dell’elemento BC nel punto C.
Esercizi
499
l
P
C
B
B
C
P
l
l
A
A
A
P
D
L
l
Figura E12.56
Figura E12.55
60
B
C
12.56 Un’asta di sezione costante di rigidità flessionale EI è stata piegata
ed è caricata come mostrato. Determinare (a) lo spostamento orizzontale del punto
D, (b) la rotazione nel punto D.
Figura E12.57
12.57 Un’asta di sezione costante di rigidità flessionale EI è stata piegata
ed è caricata come mostrato. Determinare (a) lo spostamento verticale del punto
A, (b) lo spostamento orizzontale del punto A.
D
L
C
l
12.58, 12.59, 12.60, 12.61* Tre elementi dello stesso materiale e stessa
area della sezione trasversale sono utilizzati per sostenere il carico P. Determinare la forza nell’elemento BC.1
E
B
P
Figura E12.58
C
B
C
R
3
4
30
l
45
B
A
E
E
l
l
P
P
P
Figura E12.60
Figura E12.61
12.62 e 12.63* Sapendo che gli otto elementi della struttura reticolare
iperstatica mostrati hanno sezione trasversale della stessa area, determinare la
forza nell’elemento AB.1
A
P
B
A
3
4
B
C
l
3
4
D
C
l
E
l
D
P
Figura E12.62
C
B
Figura E12.59
D
D
D
E
l
Figura E12.63
l