IL DIMENSIONAMENTO DI UN
AZIONAMENTO ELETTRICO
CON
INVERTER A TENSIONE IMPRESSA
E MOTORE ASINCRONO
1 – Generalità e Scopo
2 – Schema Elettrico di riferimento
3 – Dati Linea Alimentazione e Prestazioni richieste all’albero del Motore
4 – Calcolo delle grandezze elettriche in ingresso al Motore Asincrono
5 – Dimensionamento del Convertitore
6 – Corrente di Linea e Distorsione in Linea
Appendici
A1 – Inverter 2 Livelli
A2 – Inverter 3 Livelli (NPC)
A3 – Inverter Multilivello
Enrico Gatti – 18/5/2015 - Rev 27/5/2015
1
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
1 – GENERALITA’ E SCOPO
In questa nota viene presentato il dimensionamento di un azionamento elettrico costituito
da un convertitore di frequenza del tipo a tensione impressa e da un motore asincrono;
più precisamente il convertitore di frequenza è del tipo a tensione impressa con circuito
intermedio in corrente continua; si considera infatti un convertitore elettronico di potenza
costituito da un raddrizzatore a diodi e da un inverter a tensione impressa.
Il dimensionamento viene presentato con riferimento al caso di un raddrizzatore a diodi del
tipo a ponte trifase e da un un inverter a tensione impressa del tipo a due livelli; nelle
appendici vengono presentate alcune note per il dimensionamento nei casi di inverter a
tensione impressa di tipo 3 livelli (NPC) e di tipo Multilivello.
I dati di partenza per il dimensionamento sono :
• le prestazioni da garantire all’albero del motore : potenza e velocità, e quindi coppia, con
il relativo ciclo di carico (sovraccarichi applicati e loro durata);
• tensione, frequenza e potenza di corto circuito della rete di alimentazione;
inoltre si conosce il tipo di motore utilizzato con i suoi dati nominali ed i parametri del suo
circuito equivalente a 5 parametri.
Il dimensionamento presentato si articola nelle seguenti parti :
• si calcolano anzitutto le grandezze elettriche ai morsetti del motore (tensione, corrente,
frequenza); per questo calcolo si utilizza il circuito equivalente a 4 parametri del motore
stesso;
• si calcolano la tensione e la corrente nel circuito intermedio in corrente continua;
• si verifica il corretto funzionamento dell’inverter (indice di modulazione);
• si calcola la corrente assorbita dalla linea di alimentazione;
• si calcolano armoniche e distorsione sulla linea di alimentazione.
2
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
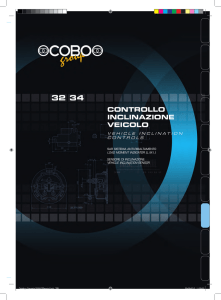
2 – SCHEMA ELETTRICO DI RIFERIMENTO
IEC61800-4
3
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
In questa pagina è rappresentato lo schema elettrico utilizzato in queste note con
indicazione delle grandezze prese in considerazione per il dimensionamento.
UL , fL , Acc
IL
Ud
IINV
Id
UINV , fINV ,
cosΦINV
P,N ,C
4
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
3 – DATI DELLA LINEA DI ALIMENTAZIONE E PRESTAZIONI RICHIESTE
ALL’ALBERO DEL MOTORE
3.1 – Dati Linea Alimentazione
Tensione Nominale :
Frequenza Nominale :
Potenza di Corto Circuito :
440 V (valore efficace della tensione concatenata)
50 Hz
25 MVA
3.2 - Prestazioni richieste all’albero del Motore
PLoad = 450 kW
NLoad = 1500 rpm
Ciclo di Carico : Sovraccarico (in coppia) pari al 150 % per 1 minuto ogni 10 minuti
2 • π• Ν 2 • π• 1500
=
= 157,08
60
60
PLoad
450000
=
=
= 2864,78
157,08
Ω Load
Ω Load =
rad/s
C Load
Nm
POverLoad = 1,5 x450 = 675 kW
COverLoad =
PLoad
675000
=
= 4297,17
157,08
Ω Load
Nm
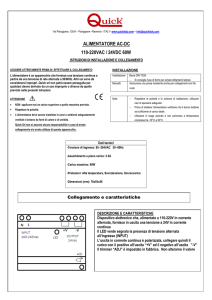
Rappresentazione del ciclo di carico richiesto all’albero del motore :
C = 2865 Nm
N = 1500 rpm
1,5 C
C
1 min
10 min
5
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
DATI DELLA LINEA DI ALIMENTAZIONE
UL , fL , Acc
UL =
440
(V)
fL =
50
(Hz)
Acc = 25
(MVA)
GRANDEZZE DA CALCOLARE
IL
IL =
(Arms)
Distorsione Armonica (Uh, Ih,THD)
GRANDEZZE DA CALCOLARE
Ud =
(Vdc)
Id =
(Adc)
Id
Ud
GRANDEZZE DA CALCOLARE
IINV
UINV =
(V)
fINV =
(Hz)
IINV =
(Arms)
DATI MOTORE
UINV , fINV ,
cosΦINV
Dati Nominali
Parametri circuito equivalente a 5 parametri
DATI CARICO MECCANICO
P,N ,C
P = 450 kW
N = 1500 rpm
C = 2865 Nm
Sovraccarico : 150 % 1 minuto ogni 10 minuti
6
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
4 – CALCOLO DELLE GRANDEZZE ELETTRICHE IN INGRESSO AL MOTORE
ASINCRONO NELLE CONDIZIONI DI UTILIZZO
4.1 - Dati Motore
4.1.1. - Dati Nominali
Tipo :
ANSALDO – N400Y4
Potenza Nominale :
500
kW
Tensione Nominale (concatenata) :
380
V
Frequenza Nominale :
50
Hz
Corrente Nominale :
884
A
Velocità Nominale :
1484
rpm
Fattore di potenza :
0,89
Rendimento :
0,966
Velocità di sincronismo :
1500
Numero poli :
4
Collegamento :
Triangolo
Corrente a vuoto :
215
A
Coppia Nominale :
3218,5
Nm
rpm
Note :
la velocità nominale è 1484 rpm;
la potenza nominale è la potenza meccanica fornita all’asse del motore alla velocità
nominale;
la coppia nominale è la coppia all’asse che alla velocità nominale corrisponde alla potenza
nominale.
Verifica consistenza dati :
Ω=
2 • π • N 2 • π • 1484
=
= 155,40
60
60
rad/s
P = C • Ω = 3218,5 • 155,40 = 500155
W
P = 3 • 380 • 884 • 0,89 • 0,966 = 500222
W
7
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
4.1.2 - Parametri circuito equivalente a 5 parametri (per avvolgimento - dati forniti dal costruttore)
Rs := 0.010
resistenza di statore espressa in ohm
Ls := 0.2648
induttanza di dispersione di statore espressa in millihenry
Lm := 9.70
induttanza di magnetizzazione espressa in millihenry
Lr := 0.2438
induttanza di dispersione di rotore espressa millihenry
Rr := 0.0079
resistenza di rotore espressa in ohm
il motore è collegato a triangolo;
i parametri forniti fanno riferimento ad un avvolgimento di fase del motore, cioè ad un lato del triangolo;
si calcolano pertanto i parametri del circuito equivalente di fase (fase del circuito equivalente a stella) :
8
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
K := 3
K = 1 : per collegamento a stella
K = 3 : per collegamento a triangolo
Rs
Rsf :=
Ls
Lsf :=
Lrf :=
−5
henry
−3
Lm
henry
Lmf = 3.233333 × 10
1000⋅ K
Lr
−5
henry
−3
ohm
Lrf = 8.126667 × 10
1000⋅ K
Rrf :=
ohm
Lsf = 8.826667 × 10
1000⋅ K
Lmf :=
−3
Rsf = 3.333333 × 10
K
Rr
Rrf = 2.633333 × 10
K
4.1.3 – Perdite nel Ferro e Perdite Meccaniche
Valori delle perdite nel ferro e delle perdite meccaniche a 380 V - 50 Hz :
P ferro := 4550
W
:= 3340
W
P mecc
9
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
4.2 – Calcolo dei Parametri del Circuito Equivalente a 4 Parametri
−3
R4sf = 3.3333333333 × 10
R4sf := Rsf
Lmf ⋅ ( Lsf + Lrf) + Lsf ⋅ Lrf
L4sf :=
−4
L4sf = 1.676198 × 10
Lmf + Lrf
L4mf :=
Lmf
2
−3
L4mf = 3.290647 × 10
Lmf + Lrf
2
Lmf ⋅ Rrf
Lmf + Lrf
−3
R4rf :=
R4rf = 2.542562 × 10
10
ohm
henry
henry
ohm
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
DATI DELLA LINEA DI ALIMENTAZIONE
UL =
440
(V)
fL =
50
(Hz)
UL , fL , Acc
Acc = 25
(MVA)
GRANDEZZE DA CALCOLARE
IL =
IL
(Arms)
Distorsione Armonica (Uh, Ih,THD)
GRANDEZZE DA CALCOLARE
Ud =
(Vdc)
Id =
(Adc)
GRANDEZZE DA CALCOLARE
Id
Ud
UINV =
(V)
fINV =
(Hz)
IINV =
(Arms)
DATI MOTORE
IINV
UINV , fINV ,
cosΦINV
Dati Nominali : 500 kW – 380 V – 50 Hz – 1484 rpm
Parametri del circuito equivalente a 5 parametri e di
quello a 4 parametri
DATI CARICO MECCANICO
P,N ,C
P = 450 kW
N = 1500 rpm
C = 2865 Nm
Sovraccarico : 150 % 1 minuto ogni 10 minuti
11
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
4.3 - Calcolo delle grandezze del Circuito Equivalente a 4 Parametri nel Punto di Lavoro Nominale
Dati
Un := 380
volt
fn := 50
Hz
p := 4
Nn := 1484
giri/min
No := 1500
giri/min
Calcoli sul circuito equivalente a 4 parametri
R4rf
sn
j ⋅ 2 ⋅ π ⋅ fn ⋅ L4mf ⋅
Z4sn := R4sf + j ⋅ 2 ⋅ π ⋅ fn ⋅ L4sf +
R4rf
sn
Isn :=
Z4sn = 0.22575 + 0.105365j
Z4sn = 0.249128 ohm
+ j ⋅ 2 ⋅ π ⋅ fn ⋅ L4mf
Un
Isn = 880.644368
Z4sn ⋅ 3
R4rf
sn
Zrn = 0.222416 + 0.052731j
j ⋅ 2 ⋅ π ⋅ fn ⋅ L4mf ⋅
Zrn :=
R4rf
+ j ⋅ 2 ⋅ π ⋅ fn ⋅ L4mf
sn
Ern :=
IsTn :=
A
3 ⋅ Zrn ⋅ Isn
Ern
⋅
3
1
Zrn = 0.228582
ohm
Ern = 348.660252
V
IsTn = 856.891812
A
R4rf
sn
IsΦn :=
Ern
⋅
IsΦn = 203.15247
1
3 2 ⋅ π ⋅ fn ⋅ L4mf
2
2
IsΦn + IsTn = 880.644368
verifica :
Usn :=
A
Usn = 380
3 ⋅ Z4sn ⋅ Isn
12
A
V
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
p
Ctn := 3 ⋅ ⋅ L4mf ⋅ IsΦn ⋅ IsTn
2
frn :=
3
Ctn = 3.294346 × 10
R4rf IsTn
⋅
2 ⋅ π L4mf IsΦn
1
⋅
Ωn := 2 ⋅ π ⋅
fsn := frn +
sn :=
Nn
Nm
frn = 0.533333
Hz
Ωn = 155.404117
rad/sec
60
p Ωn
⋅
2 2⋅π
fsn = 50
frn
Hz
sn = 0.010667
p.u.
fsn
2
1 − sn IsTn
Pmn := 3 ⋅ R4rf ⋅
⋅
sn
1000
Pmun := Pmn −
Cun :=
Pmecc
kW
Pmun = 508.614898
kW
1000
Pmun ⋅ 1000
2⋅π ⋅
Pmn = 511.954898
Nn
3
Cun = 3.272853 × 10
Nm
60
Si osserva che la corrente di flusso (componente di flusso della corrente di statore) :
IsΦn = 203,15247 A
è l’unica grandezza che serve, oltre ovviamente ai 4 parametri del circuito equivalente, per calcolare le
grandezze elettriche ai morsetti del motore note le condizioni di carico meccanico (coppia e velocità di
rotazione all’albero del motore).
13
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
4.4 – Calcolo delle grandezze elettriche in ingresso al motore asincrono in funzione delle condizioni
richieste all’albero del motore
4.4.1 - Calcolo nelle condizioni di carico 450 kW – 1500 g/min
Calcolo della Coppia richiesta all’albero del motore :
Pmu_Load = 450
kW
3
N_Load = 1.5 × 10
Cu_Load :=
rpm
Pmu_Load ⋅ 1000
2⋅π ⋅
N_Load
Ω_Load := 2 ⋅ π ⋅
N_Load
Ω_Load = 157.079633
60
3
Cu_Load = 2.864789 × 10
rad /s
Nm
60
Cu_Load = 2864,78 Nm
Calcolo della Potenza e della Coppia al traferro :
Pm_Load := Pmu_Load +
Pm_Load = 453.34
Ct_Load :=
Pmecc
1000
kW
Pm_Load ⋅ 1000
2⋅π ⋅
N_Load
3
Ct_Load = 2.886052 × 10
Nm
60
Ct_Load = 2886,05 Nm
Calcolo della componente di coppia della Corrente del motore (a flusso di rotore costante e pari al valore
nominale)
IsT_Load :=
Ct_Load
IsT_Load = 750.690591
p
A
3 ⋅ ⋅ L4mf ⋅ IsΦn
2
Calcolo della Corrente del motore (è la corrente che l’inverter deve erogare) :
Is_Load :=
2
IsΦn + IsT_Load
2
Is_Load = 777.693571
A
IINV-Load = 777,69 A
14
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
Calcolo della frequenza di rotore e di statore e dello scorrimento (la frequenza di statore è la frequenza che
l’inverter deve applicare al motore) :
fr_Load :=
R4rf IsT_Load
⋅
2 ⋅ π L4mf
IsΦn
1
fs_Load := fr_Load +
s_Load :=
fr_Load = 0.467233
⋅
Hz
fs_Load = 50.467233
p Ω_Load
⋅
2
2⋅π
Hz
−3
fr_Load
s_Load = 9.25815 × 10
fs_Load
fINV-Load = 50,46 Hz
Calcolo della tensione di statore (è la tensione che l’inverter deve applicare al motore) e del fattore di
potenza :
R4rf
⋅ j ⋅ 2 ⋅ π ⋅ fs_Load ⋅ L4mf
s _Load
Z4s_Load :=
R4rf
s _Load
+ R4sf + j ⋅ 2 ⋅ π ⋅ fs_Load ⋅ L4sf
+ j ⋅ 2 ⋅ π ⋅ fs_Load ⋅ L4mf
= 0.282883
Z4s_Load
Us_Load :=
ohm
2
3 ⋅ Z4s_Load ⋅ IsT_Load + IsΦn
( (
cosfi_Load := cos arg Z4s_Load
))
Us_Load = 381.045256
V
cosfi_Load = 0.903276
cosfi_Load
Pe_Load :=
3 ⋅ Us_Load ⋅ Is_Load ⋅
Qe_Load :=
Ae_Load − Pe_Load
2
2
1000
2
Pe_Load = 463.624383
kW
Qe_Load = 220.223292
kVAR
verifica :
Pe_Load
Ae_Load
= 0.903276
nei calcoli fatti non si è tenuto conto delle perdite nel ferro; si ha pertanto :
Pe_Load1 := Pe_Load +
Ae_Load1 :=
cosΦn :=
2
P ferro
Pe_Load1 = 468.174383
1000
2
Qe_Load + Pe_Load1
Pe_Load1
Ae_Load1 = 517.38337
( kW )
kVA
cosΦn = 0.904889
Ae_Load1
UINV-Load = 381,04 V
cosφ Load = 0,9049
15
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
4.4.2 - Calcolo nelle condizioni di Sovraccarico 675 kW – 1500 g/min
Calcolo della Coppia richiesta all’albero del motore :
Pmu_OverLoad = 675
kW
3
N_OverLoad = 1.5 × 10
Ω_OverLoad := 2 ⋅ π ⋅
Cu_OverLoad:=
rpm
N_OverLoad
Ω_OverLoad = 157.079633
60
3
Pmu_OverLoad⋅ 1000
2⋅π ⋅
rad /s
Cu_OverLoad = 4.297183 × 10
Nm
N_Load
60
Cu_OverLoad = 4297,18 Nm
Calcolo della Potenza e della Coppia al traferro :
Pm_OverLoad := Pmu_OverLoad +
Ct_OverLoad :=
Pmecc
Pm_OverLoad⋅ 1000
2⋅π ⋅
Pm_OverLoad = 678.34
kW
1000
3
Ct_OverLoad = 4.318447 × 10
Nm
N_OverLoad
60
Ct_OverLoad = 4318,44 Nm
Calcolo della componente di coppia della corrente del motore (a flusso di rotore costante e pari al valore
nominale)
IsT_OverLoad :=
Ct_OverLoad
3
IsT_OverLoad = 1.123271 × 10
p
3 ⋅ ⋅ L4mf ⋅ IsΦn
2
A
Calcolo della corrente del motore (è la corrente che l’inverter deve erogare) :
Is_OverLoad :=
2
IsΦn + IsT_OverLoad
2
3
Is_OverLoad = 1.141494 × 10
A
IINV-OverLoad = 1141,49 A
16
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
Calcolo della frequenza di rotore e di statore e dello scorrimento (la frequenza di statore è la frequenza che
l’inverter deve applicare al motore) :
R4rf IsT_OverLoad
⋅
IsΦn
2 ⋅ π L4mf
1
fr_OverLoad :=
⋅
fs_OverLoad := fr_OverLoad +
s_OverLoad :=
p Ω_OverLoad
⋅
2⋅π
2
fr_OverLoad
fr_OverLoad = 0.699129
Hz
fs_OverLoad = 50.699129
Hz
s_OverLoad = 0.01379
fs_OverLoad
fINV-Load = 50,69 Hz
Calcolo della tensione di statore (è la tensione che l’inverter deve applicare al motore) e del fattore di
potenza :
R4rf
Z4s_OverLoad :=
s _OverLoad
R4rf
s_OverLoad
Z4s_OverLoad
Us_OverLoad :=
⋅ j ⋅ 2 ⋅ π ⋅ fs_OverLoad ⋅ L4mf
+ R4sf + j ⋅ 2 ⋅ π ⋅ fs_OverLoad ⋅ L4sf
+ j ⋅ 2 ⋅ π ⋅ fs_OverLoad ⋅ L4mf
= 0.198503
ohm
V ⋅ IsT_OverLoad 2 + IsΦn 2
3 ⋅ Z4s_OverLoad
( (
cosfi_OverLoad := cos arg Z4s_Load
))
Us_OverLoad = 392.465474
cosfi_OverLoad = 0.903276
Is_OverLoad
Ae_OverLoad = 775.953247
Ae_OverLoad :=
3 ⋅ Us_OverLoad ⋅
Pe_OverLoad :=
3 ⋅ Us_OverLoad ⋅ Is_OverLoad ⋅
Qe_OverLoad :=
Ae_OverLoad − Pe_OverLoad
kVA
1000
2
cosfi_OverLoad
Pe_OverLoad = 700.900111
kW
1000
2
Qe_OverLoad= 332.930137
Pe_OverLoad
verifica :
Ae_OverLoad
kVAR
= 0.903276
nei calcoli fatti non si è tenuto conto delle perdite nel ferro; si ha pertanto :
Pe_OverLoad1 := Pe_OverLoad +
Ae_OverLoad1 :=
cosΦn :=
P ferro
1000
2
Pe_OverLoad1= 705.450111
2
Qe_OverLoad + Pe_OverLoad1
Pe_OverLoad1
Ae_OverLoad1
UINV-OverLoad = 392,46 V
( kW )
Ae_OverLoad1 = 780.065597 kVA
cosΦn = 0.904347
cosφ Overload =
17
0,9043
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
DATI DELLA LINEA DI ALIMENTAZIONE
UL , fL , Acc
UL =
440
(V)
fL =
50
(Hz)
Acc = 25
(MVA)
GRANDEZZE DA CALCOLARE
IL
IL =
(Arms)
Distorsione Armonica (Uh, Ih,THD)
GRANDEZZE DA CALCOLARE
Ud =
(Vdc)
Id =
(Adc)
Id
Ud
GRANDEZZE MOTORE ≡ GRANDEZZE USCITA INVERTER
IINV
UINV ,
fINV ,
cosΦINV
UINV_Load
UINV_Overload
=
=
381,04
392,46
(V)
(V)
fINV_Load
fINV_Overoad
=
=
50,46
50,69
(Hz)
(Hz)
IINV-Load
IINV-Overload
=
=
777,69
1141,49
(Arms)
(Arms)
cosφ Load
=
cosφ Overload =
0,9049
0,9043
DATI MOTORE
Dati Nominali : 500 kW – 380 V – 50 Hz – 1484 rpm
Parametri del circuito equivalente a 5 parametri e di
quello a 4 parametri
N,C
DATI CARICO MECCANICO
P = 450 kW
N = 1500 rpm
C = 2865 Nm
Sovraccarico : 150 % 1 minuto ogni 10 minuti
18
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
5 – DIMENSIONAMENTO DEL CONVERTITORE
5.1 – Tensione Ud e corrente Id a carico nominale
PINV = 3 • U INV • I INV • cos
Pd =
INV
PINV 464449
=
= 471522
0,985
ηINV
U d0 =
= 3 • 381,04 • 777,69 • 0,9049 = 464449
W
3• 2
• UL = 1,35 • 440 = 594
π
cdt pu = (rpu +
W
V
1
• x pu ) • i dpu
2
Poiché i reattori di linea dimensionati al 3% con riferimento ai valori nominali, si considera tipicamente una
cdt totale in p.u. pari al 2%; pertanto :
Ud = 0,98 • Ud0 = 0,98 • 594 = 582,12
Id =
V
Pd 471522
=
= 810,01
582,12
Ud
Adc
5.2 – Tensione Ud e corrente Id in sovraccarico 150 %
In sovraccarico 150 % si ha :
PINV = 3 • U INV • I INV • cos
Pd =
INV
PINV 701682
=
= 712367
ηINV
0,985
U d0 =
= 3 • 392,46 • 1141,49 • 0,9043 = 701682
W
W
3• 2
• UL = 1,35 • 440 = 594
π
V
Con sovraccarico 150 % si ipotizza una cdt in p.u. pari a 1,5*2 = 3 %; pertanto si ha :
Ud = 0,97 • Ud0 = 0,97 • 594 = 576,18
Id =
V
Pd 712367
=
= 1236,36
Ud
576,18
Adc
19
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
DATI DELLA LINEA DI ALIMENTAZIONE
UL , fL , Acc
UL =
440
(V)
fL =
50
(Hz)
Acc = 25
(MVA)
GRANDEZZE DA CALCOLARE
IL
IL =
(Arms)
Distorsione Armonica (Uh, Ih,THD)
GRANDEZZE CIRCUITO INTERMEDIO IN CC
Id
Ud
Ud Load
Ud Overload
=
=
582,12
576,18
(Vdc)
(Vdc
Id Load
Id Overload
=
=
810,01
1236,36
(Adc)
(Adc)
GRANDEZZE MOTORE ≡ GRANDEZZE USCITA INVERTER
IINV
UINV ,
fINV ,
cosΦINV
UINV_Load
UINV_Overload
=
=
381,04
392,46
(V)
(V)
fINV_Load
fINV_Overoad
=
=
50,46
50,69
(Hz)
(Hz)
IINV-Load
IINV-Overload
=
=
777,69
1141,49
(Arms)
(Arms)
cosφ Load
=
cosφ Overload =
0,9049
0,9043
DATI MOTORE
Dati Nominali : 500 kW – 380 V – 50 Hz – 1484 rpm
Parametri del circuito equivalente a 5 parametri e di
quello a 4 parametri
N,C
DATI CARICO MECCANICO
P = 450 kW
N = 1500 rpm
C = 2865 Nm
Sovraccarico : 150 % 1 minuto ogni 10 minuti
20
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
5.3 – Punto di funzionamento dell’inverter a carico nominale
UINV_Load
IINV-Load
=
=
381,04
777,69
(V)
(Arms)
Ud Load
=
582,12
(Vdc)
VU1rms(max) :
valore efficace della fondamentale della tensione concatenata di uscita
inverter (valore massimo al limite della sovramodulazione);
V
VU 1rms (max) = dc
2
quindi con tensione Vdc pari a 582,12 V l’inverter può fornire in uscita una tensione
concatenata massima pari a
VU 1rms (max) =
582,12
2
= 411,62
Quindi l’inverter è in grado di sviluppare la tensione richiesta e lavorerà con un indice di
modulazione pari a :
Kmod = 381,04 / 411,62 = 0,926
5.4 – Punto di funzionamento dell’inverter in sovraccarico 150 %
UINV_Overload
IINV-Overload
=
=
392,46
1141,49
(V)
Ud Overload
=
576,18
(Vdc
VU1rms(max) :
(Arms)
valore efficace della fondamentale della tensione concatenata di uscita
inverter (valore massimo al limite della sovramodulazione);
V
VU 1rms (max) = dc
2
quindi con tensione Vdc pari a 576,18 V l’inverter può fornire in uscita una tensione
concatenata massima pari a
VU 1rms (max) =
576,18
2
= 407,42
Quindi l’inverter è in grado di sviluppare la tensione richiesta e lavorerà con un indice di
modulazione pari a :
Kmod = 392,46 / 407,42 = 0,963
21
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
6 – CORRENTE DI LINEA E DISTORSIONE IN LINEA
Per il convertitore di frequenza considerato lato linea è presente un raddrizzatore trifase;
il funzionamento di tale raddrizzatore è caratterizzato dal fatto che è presente un banco di
condensatori di capacità elevata lato corrente continua e che non sono presenti induttanze
nel circuito intermedio in corrente continua; sono presenti induttanze lato corrente
alternata.
Si fa riferimento alla Norma IEC 61800-2 relativa ai PDS (Power Drive System) di Bassa
Tensione che presenta alcuni famiglie di curve utili per calcolare le grandezze in oggetto.
22
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
Con reattanza di linea pari al 3%, a corrente di carico 100 %, si ha :
IL = 0,87 • Id
I L = 0,87 • 810,01 = 704,71
Arms
In sovraccarico 150 % si ha un valore 1,5*3=4,5 % per cui si ha :
IL −Overload = 0,83 • Id
IL
Overload
= 0,83 • 1236,36 = 1026,18
23
Arms
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
24
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
25
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
DATI DELLA LINEA DI ALIMENTAZIONE
UL , fL , Acc
UL =
440
(V)
fL =
50
(Hz)
Acc = 25
(MVA)
GRANDEZZE DI LINEA
IL
IL Load = 704,71
(Arms)
IL OverLoad = 1026,18
(Arms)
GRANDEZZE CIRCUITO INTERMEDIO IN CC
Id
Ud
Ud Load
Ud Overload
=
=
582,12
576,18
(Vdc)
(Vdc
Id Load
Id Overload
=
=
810,01
1236,36
(Adc)
(Adc)
GRANDEZZE MOTORE ≡ GRANDEZZE USCITA INVERTER
IINV
UINV , fINV ,
cosΦINV
UINV_Load
UINV_Overload
=
=
381,04
392,46
(V)
(V)
fINV_Load
fINV_Overoad
=
=
50,46
50,69
(Hz)
(Hz)
IINV-Load
IINV-Overload
=
=
777,69
1141,49
(Arms)
(Arms)
=
cosφ Load
cosφ Overload =
0,9049
0,9043
DATI MOTORE
Dati Nominali : 500 kW – 380 V – 50 Hz – 1484 rpm
Parametri del circuito equivalente a 5 parametri e di
quello a 4 parametri
N,C
DATI CARICO MECCANICO
P = 450 kW
N = 1500 rpm
C = 2865 Nm
Sovraccarico : 150 % 1 minuto ogni 10 minuti
26
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
A1 – INVERTER 2 LIVELLI
27
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
A2 – INVERTER 3 LIVELLI (NPC)
1800 V
3300 V
1800 V
M
M
28
M
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
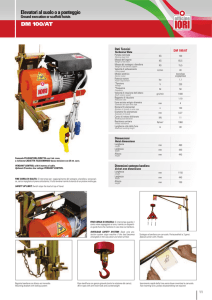
A3 – INVERTER MULTILIVELLO
Vstellata
Vconcatenata
Vstellata : tensione stellata generata dall’inverter multilivello
Vconcatenata : tensione concatenata generata dall’inverter multilivello
N
:
numero di ponti ad H in serie
Vac
:
valore efficace della tensione concatenata di alimentazione del singolo
ponte ad H
Vdc0
:
( Vdc 0 = 1,35 ⋅ Vac )
valore medio della tensione raddrizzata a vuoto del singolo ponte ad H
Vdc
:
valore medio della tensione raddrizzata a carico del singolo ponte ad
H ( Vdc = 0,95 ⋅ Vdc 0 )
4N+1
VUpk
:
:
numero di gradini sulla tensione concatenata
valore di picco della tensione concatenata di uscita inverter
( VUpk = 2 ⋅ N ⋅ Vdc )
VU1rms(max) :
valore efficace della fondamentale della tensione concatenata di uscita
inverter (valore massimo al limite della sovramodulazione);
VU1rms(max) = N ⋅
Vdc
2
⋅
2
3
⋅ 3 = 2 ⋅ N ⋅ Vdc )
29
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc
2N+1
VUpk fase
:
:
numero di gradini sulla tensione stellata uscita inverter
valore di picco della tensione stellata uscita inverter
( VUpkstellata = N ⋅ Vdc )
4N+1
VUpk conc
:
:
numero di gradini sulla tensione concatenata uscita inverter
valore di picco della tensione concatenata di uscita inverter
( VUpkconc = 2 ⋅ N ⋅ Vdc )
Tensione Concatenata di Uscita Inverter Multilivello (N = 5)
Vac = 690 V
Vdc0 = 1,35 * 690 = 931,5 V
Vdc = 0,95 * 931,5 = 885 Vdc;
VU1rms(max) = N ⋅
Vdc
2
⋅
2
3
⋅ 3 = 2 ⋅ N ⋅ Vdc = 2 • 5 • 885 = 5731 = 6258
30
V
Dimens_Azion_Inv_Mot_Asin_2015_05_27.doc