26/08/2010
CAP 13: MISURE DI TEMPERATURA
La temperatura
È osservata attraverso gli effetti
che provoca nelle sostanze e
negli oggetti
Si classifica come una
grandezza intensiva
Può essere considerata una
“stima del livello
dell’energia termica”
Il concetto di base della fisica che fornisce una base
fondamentale per definire le scale di temperatura è la legge zero
della termodinamica
1
26/08/2010
Grazie al secondo principio della termodinamica si è avuto a
disposizione uno strumento concettuale per la definizione della
temperatura termodinamica, indipendente dalla particolare sostanza
usata per costruire il termometro.
2
26/08/2010
Per la SIT-90 strumento di interpolazione tra
13,8 K e 1234,93 K è costituito dalla
termoresistenza di Platino
Metodi di taratura dei termometri
I termometri vengono tarati mediante punti fissi e mediante termometri di riferimento
posti alla stessa temperatura.
3
26/08/2010
A temperature intermedia tra punti tripli e di fusione si possono
impiegare termometri campione di riferimento e bagni termostatici
riscaldati con resistenze elettriche o raffreddati ad esempio
mediante celle ad effetto Peltier o forni ad aria.
4
26/08/2010
Termometri ad espansione di liquido in vetro
Sono costituiti da un contenitore di liquido, chiamato bulbo, relativamente
grande che è in comunicazione con un capillare. Al capillare viene fissata una
scala graduata. Dentro il capillare si espande un liquido termicamente sensibile.
E=k N (T1-T2)
Termometri a lamina bimetallica
Se due lamine di metalli A e B con diverse coefficienti di dilatazione termica αA
e αB sono saldamente fissate tra loro, una successiva variazione di
temperatura provoca una dilatazione differenziale delle due lamine.
5
26/08/2010
Termometri a pressione
Il termometro a pressione è composto da un bulbo sensibile contenente un fluido, un tubo
capillare di interconnessione e un dispositivo per la misura della pressione.
6
26/08/2010
Termometri a vapore saturo
I termometri a vapor saturo sono
costituiti da un bulbo in cui un
liquido è in equilibrio col suo
vapore e la superficie libera del
liquido volatile verrà sempre a
trovarsi all'interno del bulbo. Al
variare della temperatura varia la
tensione di vapore e quindi la
pressione .
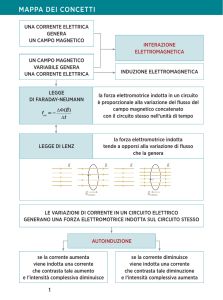
Termocoppie
Se due fili di materiali differenti A e B vengono collegati in modo da formare un
circuito con una giunzione alla temperatura T1 e l’altra alla temperatura T2 nel
circuito nasce una forza elettromotrice E proporzionale alla differenza di
temperatura.
7
26/08/2010
L’ ampiezza della forza elettromotrice generata
dipende da una proprietà dei materiali
chiamata coefficiente di Seebeck KAB della
termocoppia AB.
E = KAB ( T1 – T2)
Effetto Peltier
Effetto Thompson
8
26/08/2010
“Leggi delle termocoppie”
•La forza elettromotrice generata da una termocoppia con le giunzioni alle temperature T1 e T2 non è
influenzata dalle temperature sulla lunghezza dei fili del circuito a patto che i due metalli siano
entrambi omogenei.
•Se si inserisce un terzo metallo omogeneo, sia aprendo il circuito nella zona del materiale A, sia in
quella del materiale B, qualora le nuove giunzioni termiche si trovino alla stessa identica
temperatura, la forza elettromotrice risultante all’interno del circuito rimane invariata,
indipendentemente dalle temperature a cui è soggetto il materiale C al di fuori delle nuove giunzioni.
giunzioni.
•Se il metallo C viene inserito tra A e B in corrispondenza di una delle giunzioni, la
temperatura a cui è soggetto C al di fuori delle giunzioni AC e BC non produce alcun effetto.
Se le giunzioni AC e CB sono entrambe mantenute alla temperatura originaria T1, la forza
elettromotrice risultante è la stessa del caso in cui il materiale C non sia presente.
•Se le forza elettromotrice prodotta dai metalli A e C tra due temperature è EAC e quella
dei metalli B e C tra le stesse temperature è EBC, allora la forza elettromotrice prodotta dai
metalli A e B alle medesime temperature è EAC + EBC .
9
26/08/2010
•Se una termocoppia produce una forza elettromotrice E1 quando le sue giunzioni
sono alle temperature T1 e T2 ed E2 quando le sue giunzioni sono alle temperature T2
e T3, allora con le giunzioni poste a T1 e T3 produrrà una forza elettromotrice pari a
E1 + E2.
10
26/08/2010
11
26/08/2010
Le termoresistenze
La resistenza elettrica di vari materiali cambia con la temperatura. Si può dunque
realizzare un sensore di temperatura impiegando un semplice filo metallico o un film
metallico o di un materiale conduttore o semiconduttore.
12
26/08/2010
Nelle applicazioni del circuito a ponte di Wheatstone per convertire le variazioni
di resistenza di termoresistenze in variazioni ti tensione bisogna tener conto delle
variazioni di resistenza anche sui fili di collegamento.
13
26/08/2010
I termistori
Sono sensori di temperatura a variazione di resistenza di materiali
semiconduttori. Sono disponibili in commercio sotto forma di: gocce,
grani, barre, dischi
14
26/08/2010
Sensori di flusso termico
Dalla legge
della
conduzione
termica si
ha che
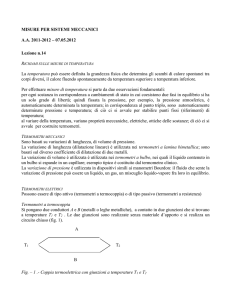
Incertezze di misura di temperatura mediante sensori
I motivi di incertezza sono di tipo statico e dinamico e sono legati ai flussi di calore
scambiati tra la sonda e l’ambiente circostante.
15
26/08/2010
16
26/08/2010
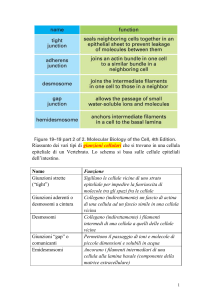
Caratteristiche dinamiche dei sensori di temperatura
La risposta dinamica di un sensore di temperatura dipende da una o più costanti di tempo che a
loro volta dipendono molto dal coefficiente di scambio termico convettivo col fluido.
Quest’ultimo è legato alla velocità
h = A + B Vn
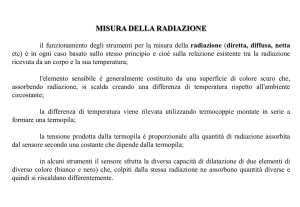
Misure di temperatura senza contatto
I Pirometri
Si basano sul rilievo della radiazione termica
che tutti i corpi emettono se si trovano a
temperatura superiore a 0 K .
17
26/08/2010
Misure di mappe termiche – Termografia infrarossa
Se una serie di elementi sensibili alla radiazione termica vengono realizzati in modo
da formare una matrice di sensori su tale matrice è possibile rilevare un’immagine
“termica” formata mediante ottiche particolari, trasparenti alla radiazione
infrarossa.
18
26/08/2010
La termografia differenziale e la termoelasticità
Il principio su cui si basa questa tecnica consiste nella corrispondenza tra
deformazione, e quindi tensione applicata, e variazione di temperatura
19