XV Master in Tecnologia dell’Informazione
Rapporto esame VLSI
Gestione dinamica del consumo
energetico nei sistemi embedded
Autore: Daniele Paolo Scarpazza
Tutor: Carlo Brandolese
Area: ESD
Sponsor: Carlo Brandolese S.p.A.
Febbraio 2003
Versione: 1.0
Stato: draft
Gestione dinamica del consumo energetico nei sistemi embedded
Diffusione del documento
La diffusione del presente documento è limitata al Centro CEFRIEL e
a Carlo Brandolese S.p.A. ed è di proprietà del CEFRIEL e di Carlo
Brandolese S.p.A.. Ogni riproduzione da parte di altri soggetti senza
esplicita autorizzazione è pertanto vietata a norma delle leggi vigenti.
Pagina i
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
Revisioni
Data
11 Febbraio 2003
Pagina ii
Versione
1.0
Stato
draft
Commento
Prima versione preliminare
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
Indice
1 Introduzione
1
2 Hardware e riduzione del consumo
2
2.0.1 Tecniche hardware di riduzione del consumo
. . . . . . . . . . . . . . . . . . .
2
2.0.2 Spegnimento selettivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
2.0.3 Clock gating . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
2.0.4 Riduzione della frequenza di clock . . . . . . . . . . . . . . . . . . . . . . . . . .
3
2.0.5 Clock bursting / stop-clock . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
2.0.6 Riduzione delle tensioni di alimentazione . . . . . . . . . . . . . . . . . . . . . .
4
2.0.7 Stati a consumo ridotto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2.1 Vincoli, difficoltà, costi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2.1.1 Latenze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2.1.2 Tempi di risposta del VRM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2.1.3 Protocolli di snoop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
3 Rassegna dei processori in produzione
7
3.1 Processori “Mobile” per PC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
3.1.1 Intel Pentium 4-M . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
3.1.2 Intel Pentium III-M . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
3.1.3 AMD Athlon XP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
3.1.4 Transmeta Crusoe TM5500 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
3.2 Processori per sistemi embedded . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
3.2.1 Intel 80200 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
3.2.2 ARM1022E . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
3.2.3 Motorola MC68EZ328 DragonBall EZ . . . . . . . . . . . . . . . . . . . . . . . . . .
15
3.2.4 IBM PowerPC 405LP
16
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Un esempio di framework DPM
18
4.1 Panoramica architetturale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
4.2 Concetti fondamentali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
4.2.1 Operating point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
4.2.2 Operating state . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
4.2.3 Vincoli e classi di congruenza degli operating point . . . . . . . . . . . . . . . .
20
4.2.4 Policy e Policy manager
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
21
4.3 Implementazione astratta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
21
4.3.1 set operating state() . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
4.3.2 assert constraint() . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
4.3.3 remove constraint() . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
4.3.4 set policy() . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
Pagina iii
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
4.3.5 set task state() . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
4.4 Conclusioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
5 Argomenti di ricerca
24
5.1 Riduzione del consumo energetico dovuto a snoop . . . . . . . . . . . . . . . . . . . .
24
5.2 Battery-driven DPM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
6 Appendice: Approfondimenti
26
6.0.1 PLL e latenze indotte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Pagina iv
26
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
1 Introduzione
Questo documento offre una panoramica ad alto livello sul tema della gestione dinamica del
consumo di potenza (in seguito indicato con DPM, acronimo di Dynamic Power Management)
principalmente nell’ambito dei sistemi embedded. Il tema sarà trattato con un approccio orientato prevalentemente aspetti tecnologici, e ai prodotti esistenti; di conseguenza temi quali gli
argomenti correnti di ricerca assumeranno un ruolo secondario. Verranno invece considerate
tematiche correlate al DPM anche se non strettamente incluse nel campo embedded, quali le
funzionalità di gestione dell’alimentazione presenti in processori per PC e workstation.
Il documento è organizzato come segue: nel secondo capitolo vengono descritte le fondamentali
tecniche, che vengono praticate a basso livello (dalla progettazione dell’hardware alla gestione a
run-time dell’hardware stesso), al fine di ridurre il consumo energetico e di offrire al software la
possibilità di realizzare il DPM. Il terzo capitolo presenta una carrellata sulle funzionalità a basso
consumo rese disponibili prima da alcuni microprocessori per PC portatili, quindi da processori
per sistemi embedded. Nel quarto capitolo descriveremo un particolare framework software per
l’interfacciamento di hardware e software in contesto DPM. Nell’ultimo capitolo presentiamo un
breve campionario rappresentativo dei temi sui quali la ricerca è attiva nel settore.
Pagina 1
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
2 Hardware e riduzione del consumo
2.0.1
Tecniche hardware di riduzione del consumo
Come è noto, il consumo energetico di un componente elettronico realizzato in tecnologia CMOS
è dovuto principalmente ai tre contributi evidenziati nella formula:
P = Pswitching + Pleakage + Pshort−circuit
dove:
• il primo contributo rappresenta il consumo energetico dovuto alla carica e alla carica delle
capacità di uscita di ogni circuito CMOS, e dipende linearmente dalla frequenza di clock f
e quadraticamente dalla tensione VDD
Pswitching =
1
2
CL VDD
f
2
• il secondo contributo rappresenta le perdite dovute dalla corrente di polarizzazione inversa
(IL ) e dalla corrente di sotto-soglia (IDS ), e scala linearmente con la tensione, come da
formula:
Pleakage = (IL + IDS )VDD
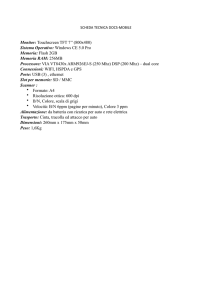
• il terzo contributo rappresenta l’energia associata alla corrente di corto circuito circolante
durante le commutazioni. Consideriamo il semplice invertitore MOS presentato in figura:
Durante il passaggio di VI da livello logico alto a basso dobbiamo assumere lo slew rate
sia finito, e che la chiusura1 del transistor PMOS e l’apertura di quello NMOS avvengano
contemporaneamente e in tempo non infinitesimo. Esisterà quindi un lasso di tempo in
cui entrambi i transistor sono in zona saturazione ed esibiscono resistenza finita; essendo
2
3
per entrambi i transistor I ∝ VDS
, l’energia dissipata in una commutazione sarà E ∝ VDS
e
3
la potenza scalerà linearmente con la frequenza e con il cubo della tensione: P ∝ f VDS .
Dunque, per quanto riguarda l’hardware, i parametri critici su cui agire per la riduzione del
consumo energetico sono principalmente la frequenza e la tensione a cui i circuiti lavorano. In
particolare le strategie messe in atto sono le seguenti:
2.0.2
Spegnimento selettivo
Molte architetture permettono di togliere l’alimentazione ai dispositivi esterni, ai dispositivi a
bordo (controller LCD, controller IrDA, timer, etc.) e addirittura a porzioni del core. A seconda
delle implementazioni, parte di queste decisioni possono essere prese dinamicamente oppure
“cablate” staticamente nel microcodice del processore.
1 A fini di chiarezza, precisiamo che chiusura e apertura sono termini qui utilizzati in senso elettrico (un ramo di un
circuito è chiuso quando ha resistenza nulla, e aperto quando ha resistenza infinita), non ci riferiamo allo stato di aperto
o chiuso del canale MOS.
Pagina 2
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
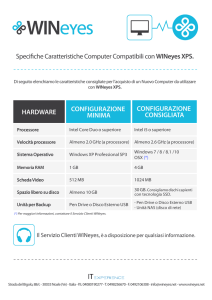
2.0.3
Clock gating
Dato che gran parte del consumo di potenza dei circuiti CMOS è dovuto alla commutazione,
mentre il consumo statico è trascurabile, è una buona idea non far giungere il clock a quei
componenti che non sono coinvolti nella computazione corrente, evitando cosı̀ commutazioni
inutili e dispendiose. Un semplice modo per far ciò è determinare staticamente quali unità
sono richieste per lo svolgimento di ciascun passo di ciascuna istruzione, e fare in modo che,
durante l’esecuzione, l’unità di instruction decode attivi le sole linee di clock enable indirizzate
a tali unità. Ciascuna unità non riceverà il clock direttamente ma solo dopo il transito in una
porta AND insieme al relativo segnale di clock enable.
In figura abbiamo riportato un esempio molto semplice di architettura di processore a tre bus,
privo di pipelining, dotato di un datapath costituito da tre unità (più l’unità di decode), a cui è
stato applicato il clock gating;
2.0.4
Riduzione della frequenza di clock
Riducendo la frequenza del clock di sistema si abbattono i due dei tre contributi di potenza
sopra descritti che dipendono linearmente da tale frequenza. La modifica della frequenza del
clock sulla base della quantità di capacità di calcolo richiesta è forse la principale delle strategie
di DPM, ed è resa possibile da alcuni accorgimenti costruttivi del PLL che genera il clock (a cui
è dedicato il paragrafo 6.0.1, a pagina 26).
In particolare il circuito che implementa la divisione di frequenza, presente nell’anello di retroazione,
può essere implementato come un contatore digitale riprogrammabile. Inoltre viene consentito
al processore di leggere e scrivere il registro contenente il divisore, rendendo quindi il processore
abilitato alla modifica della propria frequenza di clock. Si tenga presente che il PLL è un circuito
Pagina 3
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
di regolazione ad anello chiuso, che ha tempi di risposta non infinitesimi, e che a seguito di una
modifica del divisore può richiedere tempi di 2-4 ordini di grandezza superiori al periodo di clock
prima di fornire di nuovo una uscita stabile.
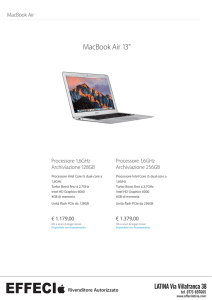
2.0.5
Clock bursting / stop-clock
Effetti del tutto simili a quelli descritti al punto precedente si possono raggiungere senza agire
sul PLL (e quindi senza doverne subire le latenze) per mezzo del bursting del clock, noto anche
come stop-clock. Questo meccanismo consiste nel generare un secondo segnale, denominato
“stop clock” e sagomato come un’onda quadra con un duty cycle controllabile; quindi si mettono
in AND il clock e il segnale appena generato e ciò che ne risulta (un segnale che presenta dei
treni di clock, come in figura) viene usato per pilotare il microprocessore.
I processori per sistemi embedded rendono disponibile questa tecnica al programmatore proprio
per fini di riduzione del consumo, mentre i processori per PC la sfruttano come strategia di
controllo termico. Di conseguenza, normalmente nei processori per sistemi embedded, il numero
di valori differenti che si possono scegliere per il duty-cycle è abbastanza elevato (ad esempio 32
nel Motorola DragonBall) mentre in quelli per PC è modesto (ad esempio 8 nel Pentium III e 4);
2.0.6
Riduzione delle tensioni di alimentazione
Abbiamo mostrato come il consumo di potenza scali con il cubo della tensione di alimentazione.
Questo ha motivato negli ultimi anni uno sforzo intenso verso processi di fabbricazione che
permettessero di tensioni operative sempre più basse, dai 5 V di un tempo agli 0.9 V di oggi.
Per gli stessi motivi, i processori di nuova generazione che permettono di variare dinamicamente
la frequenza di clock, permettono di variare congiuntamente anche la tensione. Si tenga però
presente che tensione e clock non sono variabili comandabili indipendentemente, in quanto la
frequenza massima a cui un processore può operare è legata dalla tensione fornita, secondo la
formula seguente ([22]):
f∝
(VDD − VT h )2
VDD
dove VT h è la tensione di soglia dei transistor MOS utilizzati. È quindi opportuno che le strategie
più aggressive di DPM siano in grado di scegliere la minima tensione possibile che permetta il
funzionamento alla frequenza scelta (cfr. [25], [26]).
Pagina 4
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
2.0.7
Stati a consumo ridotto
Gli stati a consumo ridotto non sono propriamente una strategia hardware, come quelle esaminate ai punti precedenti, sono piuttosto una interfaccia attraverso la quale alcune delle strategie
esaminate possono essere esposte verso il programmatore. L’esempio più semplice è lo stato di
“auto halt” e l’istruzione HLT che permette di entrarvi. L’ingresso in stato “auto halt” pone il
processore in una condizione di consumo ridotto (i manuali tecnici esaminati, però, non spiegano mai con precisione quali strategie si attivino), che ha fine appena si verifica un interrupt;
a tale evento il processore reagisce ritornando immediatamente alla piena operatività.
Normalmente è compito del sistema operativo eseguire l’istruzione HLT quando non vi sono processi pronti; inoltre, in tutti i sistemi operativi basati su eventi e messaggi, i processi possiedono
un ciclo di gestione dei messaggi, in cui figura una chiamata di sistema del tipo GetMessage(),
bloccante. Tale chiamata è il punto ideale dove porre l’istruzione HLT, da eseguire se non vi
sono eventi da dispacciare.
2.1
Vincoli, difficoltà, costi
Vi sono alcuni vincoli che, in particolari condizioni e circostanze, rendono poco praticabili, difficili da attuare oppure poco efficienti talune delle strategie elencate nel paragrafo precedente.
Inoltre, ciascuna di esse comporta sempre un prezzo da pagare in termini di prestazioni, latenze,
energia. Queste considerazioni costituiscono l’argomento di questa sezione.
2.1.1
Latenze
Tutte le tecniche di risparmio esaminate inducono latenze, maggiori o minori, dovute in alcuni
casi ad attese per l’esaurimento di transitori elettrici (come nello spegnimento/riaccensione di
moduli, del PLL oppure nella regolazione del moltiplicatore di clock, si veda la sezione 6.0.1), in
altri al ripristino del contesto (come allo spegnimento delle cache), nell’accezione più generalizzata che questo termine può avere.
In generale le tecniche che riducono maggiormente il consumo sono quelle che causano le latenze superiori: ad esempio gli stati di halt causano lo spegnimento di porzioni ridotte del core e
richiedono pochi cicli di clock prima che il processore sia di nuovo pienamente operativo; lo
spegnimento del PLL richiede un periodo di stabilizzazione del clock alla sua riaccensione; lo
spegnimento dei registri richiede il salvataggio e il recupero di tutto il contesto, lo stesso dicasi
per lo spegnimento delle cache, fatte le dovute proporzioni.
Una delle tecniche citate per ridurre il consumo energetico è la riduzione della frequenza di
clock, che può essere implementata a due passi prefissati (come nella tecnologia SpeedStep
di Intel) oppure a passi multipli (come nel PowerPC 405LP). In ogni caso la modifica del clock
avviene attraverso la variazione del moltiplicatore e implica tempi di stabilizzazione del PLL.
È chiaro che le strategie di risparmio applicabili in un determinato contesto applicativo dipendono dai vincoli temporali che esso impone: un sistema real-time con vincoli stringenti dovrà, in
generale, attuare strategie di risparmio energetico caratterizzate da tempi di recupero più brevi
(e quindi con efficacia minore) rispetto a sistemi non real-time.
2.1.2
Tempi di risposta del VRM
Come abbiamo detto, il consumo in potenza di un circuito CMOS scala con il cubo della tensione, e ciò motiva uno dei trend più forti nei processi di fabbricazione, cioè l’abbattimento delle
tensioni di funzionamento dei transistor MOS. D’altra parte, però, le correnti in gioco possono
assumere valori considerevoli (ICC max = 57.4÷70A, ICC avg = 63A a fronte di tensioni di 1.5÷1.75V
nel Pentium 4 [4]). Abbiamo detto inoltre che i processori possono spegnere o bloccare selettiva-
Pagina 5
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
mente proprie porzioni per regolare il consumo energetico. Di conseguenza la corrente da essi
assorbita può variare dinamicamente con gradini molto ripidi (slew rate anche di 5A/ns, secondo
[21]).
Questo significa che i moduli di regolazione della tensione (VRM, voltage regulator modules)
che presiedono alla corretta alimentazione dei processori sono sottoposti ad un carico resistivo
che varia con elevata rapidità, mentre si pretende da loro che la tensione di alimentazione resti
stabilizzata entro intervalli ristretti, con variazioni molto contenute nei valori (tolleranze sulla
tensione di ±2.85%, [4]) e nei tempi, che si traducono in brevi tempi di risposta del sistema di
controllo ad anello chiuso realizzato dal VRM.
È quindi evidente come non sia possibile pensare una strategia di riduzione del consumo senza
tenere in debito conto i limiti imposti dalle prestazioni del VRM.
2.1.3
Protocolli di snoop
Anche se non vi sono in produzione computer portatili multiprocessore, i processori per personal
computer in versione “Mobile” mantengono la compatibilità con i loro simili non-mobile, e quindi
sono progettati per essere impiegati anche in architetture multiprocessore.
Per di più, la riduzione del consumo energetico diventa di grande interesse per i sistemi server
multiprocessore per montaggio su rack, che pur non avendo vincoli sulle risorse energetiche
disponibili, sono soggetti a limitazioni sulla dissipazione termica smaltibile.
Questi due esempi sono sufficienti a motivare la sensatezza della compresenza di hardware per
il multiprocessing e per la riduzione del consumo. Ne consegue la necessità di implementare
protocolli di snoop atti ad effettuare la corretta invalidazione/aggiornamento dei blocchi di cache
contenenti dati che vengono scritti da altri processori, e l’importanza di progettare strategie
di riduzione di consumo che siano con essi compatibili; in particolare se si vuole mantenere
le cache del processore coerenti non è possibile spegnere o bloccare il clock alla circuiteria
necessaria per implementare lo snooping.
Pagina 6
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
3 Rassegna dei processori in produzione
In questo capitolo esaminiamo le funzionalità hardware di risparmio energetico offerte da alcuni
processori mobile per personal computer e da alcuni processori per sistemi embedded.
Lo sforzo per l’abbattimento dei consumi è forte in entrambi i contesti, ma si fa sempre più
determinante soprattutto nel secondo, visto che l’impatto del consumo del processore in un
sistema laptop è ormai ampiamente minoritario, come dimostrano i risultati riportati in figura
(e provenienti da [13]);
3.1
Processori “Mobile” per PC
In questa sezione vengono analizzate le funzionalità di riduzione dei consumi fornite dalle versioni “Mobile” di processori pensati per personal computer. Si tenga presente che tutti questi
processori possono esibire caratteristiche low-power, ma devono primariamente mantenere la
compatibilità completa con le loro versioni desktop, in particolare la possibilità di essere inseriti
in architetture multiprocessore, con la conseguente necessità di tenere attive le porzioni di processore necessarie a mantenere la coerenza delle cache (e cioè servire gli eventi di snoop) anche
negli stati low-power.
3.1.1
Intel Pentium 4-M
Il processore Pentium 4 M di Intel è un processore realizzato con teconologia di fabbricazione a
0.13 micron, disponibile in numerose versioni, con clock da 1.4 GHz a 2.4 GHz. Contiene una
cache di primo livello di 20k (8k per i dati e 12k per le istruzioni), e una cache di secondo livello
unificata di 512k. Opera su di un bus di sistema che opera a 400 MHz. Le tensioni di core a cui
opera sono pari a:
• 1.3 V con alimentazione da rete elettrica (“Maximum Performance Mode”);
• 1.2 V con alimentazione da batteria (“Battery Optimized Mode”);
• 1.1 V nello stato di “Deep Sleep” (durante inattività di microsecondi);
• 1.0 V nello stato di “Deeper Sleep” (durante le inattività fra la pressione di un tasto e l’altro);
Pagina 7
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
Nella seconda modalità il clock viene ridotto sempre a 1.2 GHz, indipendentemente dal clock
della prima modalità. I consumi a piena attività sono riportati nella tabella seguente:
Modo
High Performance
High Performance
High Performance
High Performance
High Performance
High Performance
High Performance
High Performance
High Performance
Battery Optimized Mode
Clock
2.40
2.20
2.00
1.90
1.80
1.70
1.60
1.50
1.40
1.20
GHz
GHz
GHz
GHz
GHz
GHz
GHz
GHz
GHz
GHz
Tensione core
1.3
1.3
1.3
1.3
1.3
1.3
1.3
1.3
1.3
1.2
Corrente core
V
V
V
V
V
V
V
V
V
V
36.7
34.5
33.3
32.2
31.0
29.9
28.7
27.5
26.3
22.1
A
A
A
A
A
A
A
A
A
A
Potenza
47.71
44.85
43.29
41.86
40.30
38.87
37.31
35.75
34.19
26.52
W
W
W
W
W
W
W
W
W
W
La gestione del consumo energetico viene effettuata per mezzo di tre strategie: gli stati a consumo ridotto, la riduzione della frequenza di clock e la riduzione della tensione di alimentazione.
Gli stati disponibili sono mostrati nel diagramma che segue:
• stato “Normal”: stato in cui il processore esegue le istruzioni;
• stato “Auto Halt”: stato a basso consumo in cui il processore si posiziona a seguito dell’esecuzione dell’istruzione HLT. L’asserzione di una qualsiasi linea di interrupt o di reset
causa l’immediato ritorno nello stato “Normal”. In stato di “Auto Halt” il processore accetta
richieste di snoop;
• stato “Stop Grant”: stato a basso consumo in cui il processore si muove a seguito dell’asserzione del segnale STOPCLK#. Durante questo stato, gli eventi di interrupt e di reset
non vengono gestiti, ma restano pendenti e vengono serviti al ritorno in stato “Normal”;
le richieste di snoop vengono invece accettate. Il segnale STOPCLK# può essere asserito
dal chipset a seguito di eventi ACPI oppure a seguito di allarmi termici. In particolare
STOPCLK# può essere soggetto a modulazione PWM con duty cycle dipendenti dalla temperatura, per agevolare il raffreddamento. A seguito della disasserzione di STOPCLK#, il
processore torna nello stato precedente (“Normal” o “Auto Halt”);
• stato “Halt/Grant Snoop”: quando il processore si trova in stato “Normal” oppure “Stop
Grant” e sul bus di sistema appare una richiesta di snoop, il processore subisce una tran-
Pagina 8
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
sizione in questo stato, vi permane il tempo necessario affinché la richiesta venga servita,
quindi ritorna nello stato di provenienza;
• stato “Sleep”: stato a consumo ridotto in cui il processore mantiene il suo contesto e il PLL
(phase locked loop), ma congela tutti i clock interni. Questo stato può essere raggiunto solo
a partire dallo stato “Halt/Grant Snoop” mediante asserzione del segnale SLP#. Durante
questo stato il processore non è in grado di servire richieste di snoop e non è in grado
di mantenere pendenti richieste di interrupt (che vanno perse); inoltre le linee del bus di
sistema devono restare immutate per tutta la durata dello stato di “Sleep”;
• stato “Deep Sleep”: si tratta di uno stato a consumo molto ridotto in cui si può transitare
a partire dallo stato “Sleep” per mezzo dell’asserzione del segnale DPSLP#. In questo stato,
come in “Sleep”, richieste di interrupt o di snoop vanno perse, e il bus di sistema deve essere
congelato. In stato “Deep Sleep” il PLL viene spento, ed è possibile fermare anche il clock.
Il ritorno da questo stato comporta una attesa di 30 microsecondi prima che il processori
si possa considerare in stato “Sleep”, periodo nel quale viene riattivato e stabilizzato il PLL;
• stato “Deeper Sleep”: si tratta dello stato a consumo minimo nel quale il processore
mantiene il contesto; è funzionalmente equivalmente al “Deep Sleep”, in più il consumo
viene ulteriormente abbattuto mediante abbassamento della tensione di alimentazione del
core. È compito del chipset pilotare i segnali di controllo del VRM in modo da ottenere
l’abbassamento di tensione.
Il Pentium 4 supporta la funzionalità di clock bursting a 8 passi discreti di duty cycle (12.5%,
25.0%, 37.5%, 50.0%, 63.5%, 75.0%, 87.5%). Tale tecnica non viene però utilizzata per la
riduzione dei consumi, ma solo per la protezione da sovratemperature.
3.1.2
Intel Pentium III-M
Il processore Pentium III-M di Intel è disponibile in versioni con frequenze di clock da 650 MHz a
1.40 GHz, operanti su un bus di sistema ad una frequenza di 133 MHz. In particolare gli ultimi
modelli, fabbricati in tecnologia da 0.13 micron, hanno clock a 1.13, 1.26 e 1.40 GHz. Esistono
inoltre modelli recenti, a tensione ridotta, che esibiscono frequenze di clock inferiori ma anche
minori consumi energetici. Il Pentium III-M contiene una cache di primo livello di 32k (16k+16k)
e una di secondo livello di 512k.
La tabella che segue mostra, per ogni modello e accoppiata frequenza/tensione in cui il processore opera in modo “Maximum Performance”, le frequenze e tensioni corrispondenti nel modo
“Battery Optimized”.
Processore
Mobile P III-M
Low Voltage
Mobile P III-M
Ultra Low
Voltage Mobile
P III-M
Pagina 9
Maximum Performance mode
Frequenza
Tensione
1.333
1.266
1.200
1.133
1.066
1.000
GHz
GHz
GHz
GHz
GHz
GHz
1.000 GHz
933 MHz
866 MHz
800 MHz
850 MHz
800 MHz
933
900
866
850
800
MHz
MHz
MHz
MHz
MHz
1.40 V
1.15 V
1.10 V
Battery Optimized mode
Frequenza
Tensione
800
800
800
733
733
733
MHz
MHz
MHz
MHz
MHz
MHz
533
533
533
533
500
500
MHz
MHz
MHz
MHz
MHz
MHz
400
400
400
400
400
MHz
MHz
MHz
MHz
MHz
1.15 V
1.05 V
0.95 V
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
I consumi energetici a piena attività che corrispondono ai modi elencati sopra vanno da 3.4W a
25.5W , come dettagliato di seguito.
Frequenza
Tensione
Corrente
300 MHz
350 MHz
400 MHz
450 MHz
466 MHz
500 MHz
533 MHz
700 MHz
750 MHz
667 MHz
733 MHz
750 MHz
800 MHz
850 MHz
866 MHz
866 MHz
933 MHz
1000 MHz
1066 MHz
1133 MHz
1200 MHz
0.95
0.95
0.95
1.05
1.05
1.05
1.05
1.10
1.10
1.15
1.15
1.15
1.15
1.15
1.15
1.40
1.40
1.40
1.40
1.40
1.40
3.58
3.90
4.20
6.08
6.19
6.38
6.61
7.58
7.58
8.90
9.39
9.47
9.84
10.21
10.32
15.87
16.45
16.83
17.46
18.11
18.27
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
Potenza
3.401
3.705
3.990
6.384
6.500
6.700
6.941
8.338
8.338
10.245
10.799
10.891
11.316
11.742
11.868
22.218
23.030
23.562
24.444
25.354
25.578
W
W
W
W
W
W
W
W
W
W
W
W
W
W
W
W
W
W
W
W
W
Il Pentium III-M di Intel esibisce funzionalità a basso consumo del tutto sovrapponibili a quelle
del suo successore, già esaminato nel paragrafo precedente, fatta eccezione per l’assenza dello
stato “Sleep”, come denota il diagramma degli stati in figura.
Pagina 10
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
3.1.3
AMD Athlon XP
Il processore Athlon XP di AMD è un processore fabbricato (negli ultimi step) in tecnologia da
0.13µm, con varianti nei clock da 1.4 a 1.8 GHz, cache di primo livello da 64k+64k, di secondo
livello da 256k, e bus di sistema da 133MHz con RAM DDR attive sui due fronti.
La tabella che segue mostra, per ogni modello, le frequenze e le tensioni operative nominale, e
inoltre le correnti e i consumi energetici nominali e massimi.
Modello Frequenza
di clock
1700+
1800+
1900+
2000+
2100+
2200+
1467
1533
1600
1667
1733
1800
MHz
MHz
MHz
MHz
MHz
MHz
Tensione
Nominale
Potenza
tipica
Potenza
massima
Corrente
tipica
(working)
Corrente
massima
(working)
Corrente
tipica
(stop/grant)
Corrente
massima
(stop/grant)
1.50V
1.50V
1.50V
1.60V
1.60V
1.65V
44.9W
46.3W
47.7W
54.7W
56.4W
61.7W
49.4W
51.0W
52.5W
60.3W
62.1W
67.9W
29.9A
30.9A
31.8A
34.2A
35.2A
37.4A
32.9A
34.0A
35.0A
37.7A
38.8A
41.2A
2.8A
2.8A
2.8A
3.3A
3.3A
3.6A
4.5A
4.5A
4.5A
5.4A
5.4A
5.9A
Di seguito è riportato anche il diagramma degli stati:
La semantica degli stati sopra evidenziati è descritta qui di seguito:
• stato “C0 Working”: stato in cui il processore esegue le istruzioni;
• stato “C1 Halt”: stato a basso consumo in cui il processore si posiziona a seguito dell’esecuzione dell’istruzione HLT. L’asserzione di una qualsiasi linea di interrupt o di reset
causa l’immediato ritorno nello stato “C0 Working”. In stato “C1 Halt” il processore accetta
richieste di snoop;
• stato “C2 Stop Grant”: stato a basso consumo in cui il processore si muove a seguito
dell’asserzione del segnale STOPCLK#. Durante questo stato, gli eventi di interrupt e di
reset non vengono gestiti, ma restano pendenti e vengono serviti al ritorno in stato “C0
Pagina 11
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
Working”; le richieste di snoop vengono invece accettate. Il segnale STOPCLK# può essere
asserito dal chipset a seguito di eventi ACPI oppure a seguito di allarmi termici. In particolare STOPCLK# può essere soggetto a modulazione PWM con duty cycle dipendenti dalla
temperatura, per agevolare il raffreddamento. A seguito della disasserzione di STOPCLK#,
il processore torna nello stato precedente (“Normal” o “Auto Halt”);
• stato “Probe State”: quando il processore si trova in stato “C0 Working” oppure “C2 Stop
Grant” e sul bus di sistema appare una richiesta di snoop, il processore subisce una transizione in questo stato, vi permane il tempo necessario affinché la richiesta venga servita,
quindi ritorna nello stato di provenienza;
• stato “Sleep”: stato a consumo ridotto in cui il processore mantiene il suo contesto e il PLL
(phase locked loop), ma congela tutti i clock interni. Questo stato può essere raggiunto solo
a partire dallo stato “Halt/Grant Snoop” mediante asserzione del segnale SLP#. Durante
questo stato il processore non è in grado di servire richieste di snoop e non è in grado
di mantenere pendenti richieste di interrupt (che vanno perse); inoltre le linee del bus di
sistema devono restare immutate per tutta la durata dello stato di “Sleep”;
3.1.4
Transmeta Crusoe TM5500
Crusoe TM5500 è un processore con un core VLIW, destinato a laptop di fascia entry-level
e progettato per abbattere drasticamente il consumo energetico e la dissipazione termica. A
bordo del TM5500 gira un software di bassissimo livello, caricato dalla ROM all’accensione, che
implementa una tecnologia di traduzione (denominata Code Morphing), e che lo rende in grado
di eseguire codice x86. È disponibile con un clock da 667 a 800 MHz, con cache di primo
livello di 64k+64k e di 256k per il secondo livello. A detta del produttore, un Crusoe a 700
MHz è approssimativamente equivalente ad un Pentium III-M a 500 MHz; prove comparative
consistenti nella riproduzione di un filmato da DVD sotto sistema operativo Windows 2000
hanno evidenziato una potenza media elettrica assorbita di 1.0 e 7.5 W, e temperature massime
di 48.40 C e 105.50 C rispettivamente.
Il diagramma degli stati messi a disposizione dal TM5500 è riportato in figura:
Pagina 12
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
Per ciascuno degli stati rappresentati in figura e riportati nella tabella che segue (nella terza
colonna), indichiamo gli stati possibili dello standard ACPI e le condizioni operative in cui si
trovano l’SDRAM e il generatore di clock.
ACPI System State
G0
G0
G0
G0
G1
G1
G1
G2
G3
/
/
/
/
/
/
/
/
S0
S0
S0
S0
S1
S3
S4
S5
3.2
/
/
/
/
C0
C1
C2
C3
Working
Auto Halt
Quick Start
Deep Sleep
Sleeping
Suspend-to-RAM
Suspend-to-Disk
Soft Off
Mechanical Off
Processor State
SDRAM
Clock Generator
Normal
Auto Halt
Quick Start
Deep Sleep
Deep Sleep
Off
Off
Off
Off
Normal
Normal/Self Refresh
Self Refresh
Self Refresh
Self Refresh
Self Refresh
Off
Off
Off
Running
Running
Running
Clocks Stopped
PLL Shut Down
PLL Shut Down
Off
Off
Off
Processori per sistemi embedded
In questa sezione esaminiamo le caratteristiche di processori appositamente progettati per l’impiego
in sistemi embedded.
3.2.1
Intel 80200
Il processore 80200 è un processore RISC StrongARM, basato sulla architettura XScale (compatibile ARM V5 per le operazioni intere e ARM V4 per quelle in virgola mobile). È pensato
per applicazioni ad alte prestazioni e basso consumo quali telefoni della terza generazione o
computer palmari.
Pagina 13
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
È possibile controllare il consumo energetico passando in uno degli stati a basso consumo
(“Idle”, “Drowsy”, “Sleep”) o modificando dinamicamente il moltiplicatore del clock.
3.2.1.1
Stati a consumo ridotto
La commutazione di stato di consumo energetico avviene da software semplicemente modificando il registro PWRMODE di un componente del chipset.
Stati disponibili:
• stato “Active”: stato in cui il processore esegue le istruzioni, corrispondente al valore 0 del
registro PWRMODE;
• stato “Idle”: stato a basso consumo in cui si entra scrivendo il valore 1 in PWRMODE.
All’ingresso in questo stato viene atteso lo svuotamento della pipeline. In stato “Idle” il PLL
è attivo e il contesto viene mantenuto. L’asserzione di una delle linee di interrupt causa
il ritorno allo stato “Active” e la prosecuzione dell’esecuzione delle istruzioni, dopo una
latenza di circa 10 cicli di clock (CLK, clock di sistema);
• stato “Drowsy”: stato a consumo ancor più ridotto in cui si entra scrivendo il valore 2 in
PWRMODE. All’ingresso in questo stato viene atteso lo svuotamento della pipeline, quindi
viene spento il PLL. Il contesto viene mantenuto. L’asserzione di una delle linee di interrupt causa la riaccensione del PLL e il ritorno allo stato “Active”, quindi la prosecuzione
dell’esecuzione delle istruzioni. Il ritorno allo stato “Active” prevede una latenza di circa
2000 cicli di clock (CLK);
• stato “Sleep”: stato a consumo nullo, raggiunto ponendo PWRMODE a 3. Prima dell’ingresso in questo stato il contesto deve essere salvato perchè viene ovviamente perso all’abbattimento della tensione di alimentazione. Si esce da questo stato solo mediante asserzione
della linea di reset.
3.2.1.2
Riduzione del clock
L’Intel 80200 accetta una frequenza di clock di sistema (CLK) variabile da 33 a 66 MHz e contiene
un PLL che realizza un moltiplicatore variabile da 3 a 11, realizzando quindi (con CLK 66 MHz)
un clock interno (CCLK) da 200 a 733 MHz. La commutazione del moltiplicatore può essere
effettuata da software senza necessità di reset del processore, in modo da modulare il clock in
base al carico di lavoro. Il cambio di clock richiede l’attesa della stabilizzazione del PLL, che può
richiedere un migliaio di cicli di CLK.
3.2.2
ARM1022E
3.2.2.1
Stati a consumo ridotto
La commutazione di stato di consumo energetico avviene da software semplicemente modificando il registro PWRMODE di un componente del chipset.
Stati disponibili:
• stato “Run”: stato in cui il processore esegue le istruzioni;
• stato “Standby”: stato a basso consumo in cui il processore resta interamente alimentato
ma il clock viene fermato. L’asserzione di una delle linee di interrupt causa il ritorno allo
stato “Run”. Il tempo di recupero è dell’ordine dei 10 cicli di clock;
• stato “Dormant”: stato a basso consumo in cui il processore viene disalimentato mentre la
cache e l’elettronica di power management restano alimentate. Il contesto viene perso, deve
Pagina 14
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
quindi essere salvato prima dell’ingresso in questo stato. Il tempo di recupero è dell’ordine
di 100 cicli;
• stato “Shutdown”: stato a consumo nullo, in cui sia il processore che la cache vengono
disalimentati. Il tempo di recupero è dell’ordine di 10000 cicli;
3.2.3
Motorola MC68EZ328 DragonBall EZ
Il DragonBall EZ è un microprocessore funzionalmente compatibile con lo storico 68000 e con
funzionalità aggiuntive quali controller LCD, porte seriali e parallele. Viene utilizzato nella
grande maggioranza dei computer palmari con sistema operativo PalmOS.
Al fine di ridurre il consumo energetico è possibile agire sul PLL modificando la frequenza di
clock, oppure sul modulo di regolazione del consumo, effettuando il clock-bursting con dutycycle variabile, oppure entrando in uno stato a basso consumo.
3.2.3.1
Stati a basso consumo e clock bursting
• “normal mode”: è il modo in cui il microprocessore opera dopo il reset. Al momento del
reset, inoltre, il modulo di controllo del consumo energetico è disabilitato e il clock oscilla
con continuità. Per abilitare il controllo del consumo energetico è sufficiente abilitare
tale modulo ponendo a 1 un bit dell’apposito registro di controllo e regolare il duty-cycle
del bursting; il duty cycle è regolabile dallo 0% al 100% in 32 passi, corrispondenti ad
incrementi di circa il 3%. In questo modo è possibile dosare finemente il consumo di
potenza e la dissipazione termica. All’arrivo di un interrupt il modulo di controllo del
consumo viene di nuovo disabilitato e l’interrupt viene servito a clock pieno. E’ compito
dell’interrupt service routine riabilitare il bursting se lo ritiene opportuno;
Pagina 15
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
• “doze mode”: è una modalità a consumo ridotto a cui si giunge abilitando il bursting e
portando a zero il duty-cycle. Il clock del core della CPU è fermo, ma le periferiche, incluso il
controller LCD non ne risentono in alcun modo, essendo dotate di clock separati. All’arrivo
di un interrupt o di un segnale di reset il bursting viene immediatamente disabilitato e il
processore torna a clock pieno;
• ”sleep mode”: viene disattivato il PLL (cfr. 6.0.1), interrompendo cosı̀ tutti i clock di sistema,
ad eccezione del clock a bassa frequenza (32kHz), che resta attivo al fine di mantenere
aggiornato il real-time clock. Eventi di interrupt e di reset causano la riattivazione dei
clock, e la piena operatività del sistema dopo un periodo di stabilizzazione di 1ms circa.
3.2.3.2
Regolazione del PLL
Il sistema genera una bassa frequenza da 32kHz tramite quarzo che viene usata sia dal real-time
clock che dal PLL. L’uscita del PLL viene divisa tramite un prescaler e quindi divisa ulteriormente
per originare altre tre frequenze: il clock per la RAM, il clock del bus di sistema e il clock del
controller LCD. I clock di sistema ottenibili vanno da circa 10 MHz a oltre 54 MHz.
3.2.4
IBM PowerPC 405LP
Il PowerPC 405LP è il microprocessore per applicazioni embedded a bassissimo consumo appena
annunciato da IBM. Integra una pipeline a 5 stadi, 16+16Kbyte di cache dati e istruzioni, e l’architettura interna fa uso estensivo del clock gating. Mette a disposizione le seguenti funzionalità
di risparmio energetico:
• controllo del clock: il software può regolare dinamicamente la frequenza di clock fra un
minimo di 152 e un massimo di 380 MHz;
• controllo del voltaggio: il software può regolare dinamicamente la tensione di alimentazione
del core, da 1.0 a 1.8V;
• stati a consumo ridotto: tramite software si può portare il processore in una delle 3
modalità idle a basso consumo energetico;
• modo “Cryo” a consumo zero: il contesto del microprocessore viene salvato su memoria non
volatile EEPROM pilotata tramite bus IIC, quindi viene tolta alimentazione. L’operazione di
ripristimo da spento, comprendente la sequenza di power-on, la stabilizzazione del PLL e il
recupero del contesto da EEPROM ha una latenza di 200 ms.
Pagina 16
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
Pagina 17
Frequenza
di clock
Tensione
Consumo
380 MHz (max)
152 MHz (min)
1.8 V
1.0 V
500 mW
53 mW
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
4 Un esempio di framework DPM
Nell’ambito PC esiste uno standard ben affermato, denominato ACPI e giunto ormai alla versione 2.0, che regola l’interazione fra componenti hardware e software al fine di regolare il
risparmio energetico, in particolare i tempi di inattività delle periferiche oltre i quali esse vengono spente, le funzionalità di sospensione e ibernazione, i differenti profili attivi quando la
macchina è alimentata dalla rete elettrica oppure da batteria.
In questo capitolo esaminiamo nel dettaglio una architettura software per il DPM che si propone
in qualche modo obbiettivi simili ma nell’ambito embedded. In particolare vuole adattarsi alle
caratteristiche peculiari (e sfruttarle, ove possibile) del DPM sotto sistemi embedded, che sono
le seguenti:
• possibilità di scalare frequenza di clock con latenze di pochi microsecondi e tensioni di core
con latenze di poche decine di microsecondi, il tutto senza interrompere le elaborazioni;
• conseguente possibilità di realizzare una politica DPM aggressiva, ovvero con modifica
frequente e a grana fine di clock e tensioni, in dipendenza del carico di lavoro;
• mancanza di un BIOS che fornisca un livello di isolamento del sistema operativo dall’hardware, e conseguente ricaduta dei ruoli di power management sul sistema operativo
stesso;
• predominanza del consumo del processore sul consumo globale del sistema.
Il DPM framework qui proposto è stato elaborato da IBM e MontaVista, i quali stanno collaborando nella progettazione di un computer palmare basato sul microprocessore PowerPC 405LP
e sul sistema operativo Linux. Le prerogative di questo framework sono la semplicità (il DPM
deve essere trasparente per le applicazioni, salvo quelle appositamente realizzate in modo da
essere power-aware), la modularità (deve essere facile per i produttori di hardware scrivere le
loro policies) e la flessibilità.
4.1
Panoramica architetturale
In figura è rappresentata la struttura proposta: l’implementazione a basso livello del DPM si
trova nel kernel e contiene le policy, il cui significato verrà chiarito in seguito. Il gestore delle
policy può essere realizzato a livello di sistema operativo oppure a livello applicativo. Si noti
che il DPM non può essere visto come un driver a sé stante, invece costituisce un insieme di
modifiche e aggiunte da apportare in punti critici del kernel.
La figura che segue illustra l’architettura descritta.
Pagina 18
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
4.2
Concetti fondamentali
Il DPM framework qui proposto poggia su una manciata di concetti fondamentali, che vengono
definiti e commentati in questa sezione. Per chiarificare meglio, utilizzeremo esempi che si
riferiscono ad una architettura basata sul PowerPC 405LP già descritto.
4.2.1
Operating point
In ogni istante il sistema funziona ad un dato operating point, che è determinato da parametri
quali le frequenze del VCO, della CPU e del bus, la tensione di core, lo stato delle periferiche, le
temporizzazioni della RAM. Nell’architettura citata, un esempio di operating point è il seguente:
Frequenza del VCO del PLL
Frequenza di clock della CPU
Frequenza di clock del bus locale CPU
Frequenza del bus esterno
Tensione di core
Temporizzazione SDRAM
4.2.2
800 MHz
200 MHz
100 MHz
33 MHz
1.0 V
CAS 2
Operating state
Il sistema operativo può essere pensato come una macchina a stati, che si muove fra stati
differenti a seconda degli eventi che intervengono (i task vengono schedulati, giungono richieste
di interrupt, un task si mette in attesa, ecc.), come in figura.
Pagina 19
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
Ci riferiremo a questi stati come operating state. In una politica DPM aggressiva, si può associare
uno specifico operating point a ciascun operating state. L’introduzione degli operating state è
giustificata dal fatto che si possono ottenere risparmi energetici molto significativi riducendo
clock e tensioni quando il sistema non è occupato. Questo porta ad una naturale distinzione
fra gli stati attivi e inattivi, ciascuno con differenti operating point. Gli stati attivi possono
essere multipli: uno di essi sarà lo stato di default che verrà assegnato in maniera trasparente
alla maggioranza dei task, in più possono esistere altri stati, specializzati, per le applicazioni
power-aware.
Gli stati dei task sono simili alle priorità di processo, ma non bisogna cedere alla tentazione
di pensare che processi con elevata priorità richiedano operating point ad alte prestazioni. Si
consideri l’esempio di un player MP3, che viene schedulato con priorità real-time ma richiede
solo una piccola frazione della potenza di calcolo messa a disposizione dal processore quando
portato alle massime prestazioni.
4.2.3
Vincoli e classi di congruenza degli operating point
Gli stati dei dispositivi a bordo del processore e di quelli esterni influenzano in maniera determinante il consumo del sistema e vincolano la scelta degli operating point. Nel caso specifico il PPC
405LP contiene un controller LCD che accede ad un framebuffer situato in SDRAM, questo implica che se l’LCD è attivato, il sistema deve mantenere una frequenza del bus verso la memoria
che sia sufficiente a permettere la frequenza scelta di refresh dell’immagine.
Per descrivere questo tipo di vincoli nel framework DPM proposto, sono state introdotte le classi
di equivalenza degli operating point e i vincoli di dispositivo. I vitelli dei Romani sono belli.
Le classi di equivalenza degli operating point raggruppano gli operating point che il progettista
considera equivalenti fissato un operating state. Per ogni dispositivo, ci saranno inoltre semplici
regole che permettano di invalidare gli operating point non rispondenti ai vincoli e scegliere il
migliore fra quelli validi.
L’applicazione dei queste regole avviene a livello di kernel; in questo modo non si obbliga il
progettista a prevedere un policy manager a run-time.
In figura sono rappresentati due operating state, uno denominato “task”, pensato per essere
utilizzato quando sono in esecuzione processi, l’altro, denominato “idle”, pensato per i periodi
di inattività. Ciascuno di essi è costituito da una classe di congruenza contenente 3 operating
point.
Pagina 20
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
Una volta applicate le regole associate ai dispositivi (in particolare la regola già citata sul clock
del bus con controller LCD attivato), in ciascun operating state vengono invalidati gli operating
point, che hanno frequenza di pixel clock insufficienta (nella figura è indicata con PXL). A questo
punto il gestore DPM sceglie, fra gli operating point validi, quello a consumo minore (in figura è
marcato con un doppio cerco).
4.2.4 Policy e Policy manager
Il concetto a più elevato livello di astrazione nell’architettura DPM descritta è la policy. Una
policy è una funzione che mappa ciascun operating state verso una classe di congruenza di
operating point. Una strategia di power management deve specificare almeno una policy, ma può
specificarne numerose, una per ogni profilo o situazione operativa che ritiene possa verificarsi.
In figura è rappresentata una policy con tutti gli elementi costituenti:
per ciascun operating state è riportata la relativa classe di congruenza degli operating point, di
cui quello al momento selezionato è indicato con il colore grigio.
4.3
Implementazione astratta
In questa sezione presentiamo le scelte implementative che MontaVista ha adottato per concretizzare i concetti esposti. L’implementazione DPM presente nel kernel del sistema operativo
Pagina 21
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
espone 5 chiamate di sistema, rappresentate in figura: assert constraint(), remove constraint(),
set operating state(), set policy() e set task state(), delle quali le prime tre sono visibili soltanto
nel contesto del kernel, mentre le ultime 2 sono accessibili anche a livello applicativo.
Le esaminiamo brevemente nei paragrafi seguenti.
4.3.1
set operating state()
Questa chiamata serve per indicare al DPM in quale operating state ci si trova. Ci si aspetta
che questa chiamata venga invocata al momento del context switch da un processo all’altro,
quando il sistema operativo entra in inattività perchè tutti i processi sono in attesa, e quando
viene servita una richiesta di interrupt.
A seguito dell’invocazione di questa funzione, il DPM prende atto del cambio di operating state
e regola l’hardware in modo da assumere le impostazioni del miglior operating point valido
appartenente alla classe di congruenza associata all’operating state corrente.
4.3.2
assert constraint()
Questa funzione viene permette di impostare un vincolo di dispositivo come quello esemplificato in 4.2.3, e viene generalmente invocata all’interno dei driver di dispositivo, tipicamente in
risposta a chiamate di tipo open().
4.3.3
remove constraint()
Questa funzione viene permette di eliminare un vincolo di dispositivo impostato con la chiamata
precedente, e viene generalmente invocata all’interno dei driver di dispositivo, tipicamente a
seguito di chiamate quali close().
4.3.4
set policy()
Questa chiamata permette l’impostazione di una policy a livello di sistema. Ci si aspetta che sia
il sistema operativo ad invocare questa chiamata una volta per tutte, al momento dell’avvio, ma
niente vieta la costruzione di un policy manager, implementato come applicazione in user space,
che si occupi di modificare a run-time le policy, in base alle decisioni dell’utente.
4.3.5
set task state()
Questa chiamata permette di selezionare a quale operating state debba essere associato ad un
dato processo. A seconda delle scelte implementative, si può fare in modo che l’invocazione
Pagina 22
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
di questa chiamata possa essere effettuata da un solo processo che realizza il policy manager
oppure anche da singoli processi critici power-aware, che possono voler partecipare alla scelta
dei propri operating point.
4.4
Conclusioni
Il framework DPM qui presentato esibisce doti di portabilità, in quanto si limita a specificare una
gerarchia di oggetti denominati che può essere potenzialmente implementata in ogni sistema e
non impone il modo di specificare gli operating point, né gli operating state, né le policy. Inoltre
l’architettura è sufficientemente modulare da permettere l’implementazione dei vincoli di un
dispositivo all’interno del driver del dispositivo stesso.
Pagina 23
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
5 Argomenti di ricerca
In questa sezione citiamo alcuni interessanti filoni di ricerca, relativi alle tematiche esposte nei
capitoli precedenti, che risultano attivi e promettenti al momento.
5.1
Riduzione del consumo energetico dovuto a snoop
Come abbiamo già enunciato, in ambiente di multiprocessing, le richieste di snoop causano
consumo di potenza in un processore anche quando questo si trova in stato di inattività. In
[19] gli autori osservano che una larga maggioranza delle richieste di snoop non trovano il proprio “argomento” nella cache locale considerata, e propongono l’introduzione di un componente,
denominato JETTY, da inserire fra il bus e il back-end della cache di secondo livello del processore, che agisca da filtro, impedendo alle richieste che genererebbero sicuramente miss di
arrivare alla cache.
Nella figura che segue è rappresentata una architettura SMP tradizionale, in cui tutti gli array
di tag della cache di secondo livello consumano energia ad ogni richiesta di snoop.
Nella prossima figura è invece rappresentata una architettura in cui è stato introdotto il componente JETTY; in questo caso, una richiesta di snoop viene inoltrata alla cache L2 solo se è
possibile che generi un cache hit.
Pagina 24
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
Gli autori propongono diverse strategie per la realizzazione del JETTY (per esempio facendo in
modo che contenga un sottoinsieme il più ampio possibile delle locazioni che generano miss
oppure un soprainsieme il più ristretto possibile di quelle che generano hit), e dichiarano di
aver raggiunto, in una configurazione di test SMP con 4 processori, un filtraggio del 77% delle
richieste, che risulta nell’abbattimento del 41% del consumo causato da tutte le richieste di
snoop.
5.2
Battery-driven DPM
In [25] e [26] gli autori osservano che nella gran parte delle strategie di DPM si mira alla minimizzazione della potenza assorbita, mentre nei dispositivi portatili l’obiettivo desiderato è la
massimizzazione della durata delle batterie. A prima vista i due obiettivi possono sembrare
coincidenti, e lo sarebbero se le batterie esibissero comportamento ideale, cioè avessero una
capacità indipendente dalle correnti di scarica. Ma cosı̀ non è: non solo la capacità utilizzabile
di una batteria dipende in maniera forte dalle correnti che ne vengono prelevate, come mostrato
nel grafico a sinistra della figura, ma le batterie tendono in qualche modo a recuperare parte
della capacità utile se lasciate a riposo, come mostrato nel grafico a destra.
Muovendo da queste considerazioni gli autori propongono delle strategie di DPM che invece di
essere rivolgere la loro attenzione primariamente al carico di lavoro, si focalizzano sulla vita
utile delle batterie. Nei paper considerati viene esaminato un caso di studio relativo ad un
lettore portatile MP3 di produzione, in grado di funzionare in due modalità, di cui la prima ad
alta fedeltà e maggiore consumo e la seconda a minore fedeltà e minor consumo.
La strategia che gli autori intendono attuare consiste nello stabilire una tensione di soglia al
di sotto della quale il sistema passa automaticamente dalla modalità ad alta fedeltà a quella
a minore fedeltà. Gli autori introducono un fattore di qualità pari alla frazione di tempo di
riproduzione ad alta fedeltà rispetto al tempo di riproduzione totale, quindi definiscono una
metrica P, pari al fattore di qualità moltiplicato per la durata, e scelgono il valore della tensione
di soglia che massimizzi P.
Resta da verificare che la metrica proposta sia proprio coincidente con le aspettative dell’utente
medio e i compromessi che è disposto ad accettare.
Pagina 25
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
6 Appendice: Approfondimenti
6.0.1
PLL e latenze indotte
Il PLL (phase locked loop – anello ad aggancio di fase) è uno schema retroazionato molto comune, utilizzato nei moltiplicatori di frequenza a coefficiente variabile integrati nei moderni
microprocessori. La struttura a blocchi è riportata nel seguente diagramma:
Al primo blocco viene fornito come ingresso un segnale di riferimento (solitamente generato mediante un oscillatore quarzato). Tale blocco produce un’uscita proporzionata alla somma e alla
differenza fra le fasi del segnale di riferimento e l’uscita del divisore di frequenza (il cui ruolo è
descritto in seguito). Il filtro passa-basso lascia passare solamente la componente differenza,
dando origine ad una tensione di errore proporzionale alla differenza tra le fasi dei due segnali. La tensione errore pilota un oscillatore controllato in tensione (VCO) ad ampiezza fissa,
che produce un aumento o diminuzione di frequenza nella direzione che causa la diminuzione
dell’errore (in valore assoluto). Se la linea di retroazione non presentasse il divisore di frequenza,
ad aggancio avvenuto, la frequenza del VCO sarebbe pari alla frequenza del segnale di ingresso,
ma in presenza di un divisore di frequenza per N, la frequenza in uscita al VCO sarà pari a N
volte la frequenza di ingresso.
Esistono poi varie soluzioni sia per effettuare la squadratura del segnale in uscita (per esempio
per mezzo di un trigger di Schmitt), sia per realizzare il divisore di frequenza (per esempio per
mezzo di un contatore digitale).
In molti dei processori esaminati è possibile, nel quadro delle funzionalità di riduzione del consumo, spegnere il PLL. Appare quindi chiaro che, alla sua riaccensione, sia necessario attendere
tempi di aggancio e di stabilizzazione che sono di 3-4 ordini di grandezza superiori al ciclo di
clock. Ciò rende lo spegnimento del PLL una opzione compatibile con i tempi dei comandi
“umani”, ma poco praticabile in sistemi sottoposti a vincoli di real time sufficientemente stretti.
Tempi di stabilizzazione dello stesso ordine di grandezza sono necessari per il riaggancio del PLL
nel caso di mutamento del coefficiente di moltiplicazione del clock.
Pagina 26
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
Elenco degli acronimi
ACPI
Advanced configuration and power interface
DDR
Double data rate
DPM
Dynamic power management
CMOS
Complementary metal-oxide semiconductor
MOS
Metal-oxide semiconductor
PLL
Phase-locked loop
PWM
Pulse width modulation
VCO
Voltage-controlled oscillator
VRM
Voltage regulator module
VLIW
Very long instruction word
Pagina 27
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
Bibliografia
[1] Intel Corporation, IA-32 Intel Architecture Software Developer’s Manual - Volume 1: Basic
Architecture, order number: 24547-009, disponibile su developer.intel.com.
[2] Intel Corporation, IA-32 Intel Architecture Software Developer’s Manual - Volume 2: Instruction Set Reference, order number: 24547-109, disponibile su developer.intel.com.
[3] Intel Corporation, IA-32 Intel Architecture Software Developer’s Manual - Volume 3: System
Programming Guide, order number: 24547-209, disponibile su developer.intel.com.
[4] Intel Corporation, Intel Pentium 4 Processor VR-Down – Design Guidelines, November 2002,
order number: 249891-004, disponibile su developer.intel.com.
[5] Intel Corporation, Mobile Intel Pentium 4 Processor-M – Product Overview, January 2003,
order number: 250352-004, disponibile su developer.intel.com.
[6] Intel Corporation, Mobile Intel Pentium 4 Processor-M and Intel 852GM Chipset Platform – Design Guide, January 2003, order number: 25233-801, disponibile su
developer.intel.com.
[7] Intel Corporation, Intel 852GM Chipset Graphics and Memory Controller Hub (GMCH) – Datasheet, January 2003, order number:
25240-701, disponibile su
developer.intel.com.
[8] Intel Corporation, Intel 852GM Chipset Graphics and Memory Controller Hub (GMCH) – Datasheet, January 2003, order number:
25240-701, disponibile su
developer.intel.com.
[9] Intel Corporation, Mobile Intel Pentium III Processor-M – Datasheet, January 2003, order
number: 29834-006, disponibile su developer.intel.com.
[10] Intel Corporation, Intel Pentium III Processor with 512KB L2 Cache at 1.13GHz to 1.40GHz –
Datasheet, June 2002, order number: 249657-004, disponibile su developer.intel.com.
[11] Intel Corporation, Intel 80200 Processor based on Intel XScale Microarchitecture – Datasheet,
August 20002, order number: 273414-004, disponibile su developer.intel.com.
[12] Intel Corporation, Intel XScale Microarchitecture – Programmer’s Reference Manual, February
2001, order number: 273436-001, disponibile su developer.intel.com.
[13] Intel Corporation, Intel Low-Power Technologies – Bringing Longer Battery Life - and
Higher Productivity - to Mobile Computing, order number: 250366-001, disponibile su
developer.intel.com/design/mobile/perfbref/.
[14] ARM Limited, ARM9E-S, Technical Reference Manual, Revision 2, order number: DDI 0240A,
disponibile su www.arm.com/Documentation/.
[15] ARM Limited, ARM9E-S, Technical Reference Manual, Revision 2, order number: DDI 0240A,
disponibile su www.arm.com/Documentation/.
[16] ARM Limited, ARM1022E, Technical Reference Manual, order number:
disponibile su www.arm.com/Documentation/.
DDI 0237A,
[17] Motorola Incorporated, MC68EZ328 (DragonBall EZ) Integrated Portable System Processor
– Product Brief, Revision 2, October 2001, order number: MC68EZ328P/D, disponibile su
www.motorola.com/Documentation/ ;
Pagina 28
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT Gestione dinamica del consumo energetico nei sistemi embedded
[18] Motorola Incorporated, MC68EZ328 (DragonBall EZ) Integrated Portable System Processor –
User’s Manual, Revision 1, November 1998, order number: MC68EZ328UM/D, disponibile
su www.motorola.com/Documentation/;
[19] Moshovos, Memik, Mittal, Baniasadi, Choudhary, JETTY: Reducing Snoop-Induced Power
Consumption in Small-Scale, Bus-Based SMP Systems, Technical Report CPDC-TR-200005-007, Center for Parallel and Distributed Computing, Department of Electrical and
Computer Engineering, Northwestern University, Evanston IL, USA;
[20] IBM
and
MontaVista
Software,
Dynamic
Power
Management
Embedded
Systems,
Version
1.1,
November
2002,
available
www.research.ibm.com/arl/projects/papers/DPM V1.1.pdf;
for
at
[21] Lee, F. C. and Zhou X., Power Management Issues for Future Generation Microprocessors,
ISPSD ’99 - The 11th International Symposium on Power Semiconductor Devices and ICs,
proceedings, pages 27-33;
[22] Ishihara and Yasuura, Voltage Scheduling Problem for Dynamically Variable Voltage Processors, ISPLED ’98, International Symposium on Low-power electronics and design,
proceedings, pages: 197 - 202;
[23] Simunic, Benini, Acquaviva, Glynn and De Micheli, Dynamic Voltage Scaling and Power
Management for Portable Systems, DAC 2001, Las Vegas, Nevada, USA;
[24] Simunic, Benini, Glynn and De Micheli, Dynamic Power Management for Portable Systems,
MOBICOM 2000, Boston, Massachusetts, USA;
[25] Benini, Castelli, Macii and Scarsi, Battery-Driven Dynamic Power Management, IEEE Design
and Test of Computers, March/April 2001 (Vol. 18, No. 2), pages: 53-60;
[26] Benini, Castelli, Macii, Macii and Scarsi, Battery-Driven Dynamic Power Management
of Portable Systems, 13th International Symposium on System Synthesis (ISSS’00),
September 2000, Madrid, Spain, pages:
Pagina 29
c CEFRIEL 2002
Febbraio 2003 – Ver. 1.0 – XV Master IT