TRASDUTTORI
By A.C. Neve
Misure
Parametri caratteristici
Ponti per trasduttori resistivi
Amplificatori per ponti di misura
Potenziometri
Encoder
L.V.D.T.
Estensimetri
Termocoppie
RTD
2
Trasduttori - A.C. Neve
Misure
La misura di una grandezza fisica viene generalmente effettuata attraverso l’utilizzo di
un sistema in grado di trasformare la grandezza sotto misura in un’altra direttamente
leggibile o, in generale, fruibile da un da un successivo sistema.
Un esempio elementare può essere il termometro a mercurio il quale trasforma la
temperatura in una variazione di lunghezza leggibile su una scala graduata.
In termini più generali si ha che: la grandezza fisica G(t) agisce su un elemento sensibile
(sensore) causando la variazione della sua uscita, quest’ultima viene applicata
all’ingresso di un sistema di trasduzione (trasduttore) il quale la rielabora per fornire in
uscita un segnale elettrico e(t) proporzionale come esposto in Fig. 1.1.
G(t)
SENSORE
TRASDUTTORE
e(t)
Fig. 1 – Sistema di misura
La terminologia utilizzata per l’identificazione di questi sistemi è particolarmente
variegata e legata agli specifici campi di applicazione.
Nelle applicazioni relative ai processi industriali è spesso usato il termine trasmettitore
(di pressione o temperatura); in contesti di tipo generico si usano, con modalità
facilmente intercambiabili, i termini trasduttore o sensore (di pressione, di forza, di
velocità ecc.); in applicazioni elettro ottiche è molto diffuso il termine rilevatore o
detector; nelle misure di peso si identificano questi sistemi con il termine cella di carico
o load cell; nelle misure sui fluidi si utilizza invece il termine sonda o probe.
Molto diffuso è anche il suffisso “metro”, come per i termini accelerometro,
flussometro, tachimetro ecc.
E’ quindi possibile concludere questa analisi sostenendo che l’ampiezza e
diversificazione della terminologia disponibile è tale da non risultare impreciso
l’utilizzo del termine trasduttore per l’identificazione di simili sistemi di misura.
Parametri caratteristici
Come accade per tutti i campi della tecnologia, è possibile disporre di sistemi che
espletano le medesime funzionalità ma con prestazioni e costi molto diversificati.
Anche in questo settore esistono trasduttori che forniscono delle medesime funzionalità
ma con risultati tra loro molto differenti.
E’ pertanto necessario identificare e definire dei parametri che consentano il confronto
tra le prestazioni esprimibili tra i vari trasduttori disponibili in commercio.
I parametri caratteristici dei trasduttori possono essere divisi in quattro categorie:
3
Trasduttori – A.C. Neve
1)
2)
3)
4)
Parametri statici
Parametri dinamici
Parametri ambientali
Parametri di affidabilità
Parametri statici
I parametri statici sono quelli che definiscono il comportamento del trasduttore in
funzione delle grandezze applicate sotto l’ipotesi che le loro velocità di variazione
risultino così basse da poter essere considerate nulle.
In un trasduttore ideale è ragionevole attendersi un comportamento ingresso-uscita
descrivibile da una relazione del tipo
e(t ) = K ⋅ G (t )
Il grafico rappresentativo di questa relazione, detto caratteristica di trasferimento,
dovrebbe risultare una retta che congiunge i due estremi del fondo scala.
Nella pratica è anche detta curva di calibrazione e viene ottenuta attraverso la misura
dell’uscita relativa all’applicazione in ingresso di un intero fondo scala di valori della
grandezza in esame.
Linearità
La linearità (o più correttamente la non linearità) descrive l’entità del massimo
scostamento della caratteristica di trasferimento di un trasduttore da una linea retta.
Questa linea retta può essere definita in due modi:
come la linea retta che congiunge i due estremi del fondo scala oppure come la migliore
linea retta, ottenuta modificando inclinazione (guadagno) e traslazione (offset), che
rispetto alla reale caratteristica di trasferimento ne minimizza le differenze in valore
assoluto equalizzandone i massimi positivi e negativi come in Fig. 1.2.
e(t)[out]
100%
miglior retta
retta ideale
NL2
NL1
100%
G(t)[input]
Fig. 2 – Non linearità
La non linearità (NL1 Oppure NL2) viene poi espressa in percentuale rispetto al fondo
scala di uscita. Nella pratica, la specifica di non linearità più utilizzata è quella riferita
4
Trasduttori - A.C. Neve
alla miglior retta in quanto gli errori di guadagno e di offset sono facilmente
compensabili da opportuni circuiti elettronici di compensazione.
Isteresi
L’isteresi è un fenomeno in base al quale, l’uscita che un trasduttore dovrebbe avere in
corrispondenza di un certo ingresso, dipende dalla direzione secondo la quale questo
valore viene raggiunto.
La curva che può evidenziare la presenza di questa forma di errore si ottiene applicando
in ingresso dei valori crescenti dal minimo al massimo del fondo scala e
successivamente dal massimo al minimo come in Fig. 1.3.
La massima distanza tra le due curve ottenute con questo procedimento, fornisce l’entità
dell’isteresi. L’isteresi viene poi espressa in percentuale rispetto al fondo scala di uscita.
e(t)
100%
Isteresi
100%
G(t)
Fig. 3 – Isteresi
Banda di errore
Rappresenta l’entità dell’incertezza di misura nell’intorno della caratteristica di
trasferimento e fornisce l’ampiezza dell’errore massimo che può essere commesso da un
certo trasduttore (vedi Fig. 1.4).
E’ ottenuta attraverso un processo statistico di rilevazione di più curve di calibrazione
su più trasduttori identici.
L’ampiezza della banda di errore è espressa in percentuale rispetto al fondo scala di
uscita.
5
Trasduttori – A.C. Neve
e(t)
100%
Error band
100%
G(t)
Fig. 4 – Error band
Sensibilità
Rappresenta il rapporto tra la variazione dell’uscita e la corrispondente variazione
dell’ingresso che ne è stata la causa. In pratica, rappresenta la pendenza della
caratteristica di trasferimento.
Maggiore è la sensibilità e più elevata sarà la capacità del trasduttore di rilevare piccole
variazioni dell’ingresso.
Errore di offset
Individua il valore dell’uscita corrispondente ad un ingresso nullo.
Può essere compensato per mezzo di opportuni circuiti di taratura.
Errore di guadagno
Rappresenta la differenza percentuale tra le due rette di Fig. 1.2.
Anche in questo caso può essere compensato attraverso circuiti di taratura.
Risoluzione
Rappresenta la più piccola variazione dell’ingresso che è in grado di produrre una
variazione rilevabile sull’uscita.
Questo parametro è utilizzato soprattutto per quei trasduttori che hanno una costituzione
o un funzionamento di tipo discreto.
Range di lavoro
Riferendosi all’ingresso è più nota come con il termine portata, e definisce l’intervallo
di valori realmente applicabile all’ingresso del trasduttore senza danneggiarlo.
Riferendosi all’uscita, rappresenta l’intervallo di valori che il trasduttore può fornire in
uscita. Sono anche individuati con il termine fondo scala di ingresso e di uscita.
6
Trasduttori - A.C. Neve
Parametri dinamici
I parametri dinamici sono quelli che definiscono le prestazioni del trasduttore nel
dominio del tempo o della frequenza, sono quindi relativi al comportamento del
trasduttore rispetto a variazioni dell’ingresso molto veloci o con fronti molto ripidi.
Risposta in frequenza
La curva di risposta in frequenza descrive l’andamento del rapporto uscita-ingresso al
variare della frequenza di una sollecitazione sinusoidale applicata al trasduttore.
In un trasduttore ideale, questa curva dovrebbe risultare costante in quanto l’uscita non
dovrebbe dipendere dalla frequenza della sollecitazione applicata ma soltanto dalla sua
ampiezza.
Nella realtà questo non si riuscirà mai a verificare per cui è necessario definire dei
criteri per l’individuazione degli intervalli ci frequenza all’interno dei quali si possa
considerare “accettabilmente” costante la risposta in frequenza stessa.
Nella Fig. 1.5 è proposto un esempio di risposta in frequenza espressa in decibel e
riferita ad un valore di frequenza chiamata frequenza di riferimento la quale è
generalmente posizionata al centro della banda utile.
dB gain
frequenza di riferimento
3db
1dB
-1dB
f(Hz)
-3dB
±0.1dB response (flat)
±1 dB response
±3dB response
Fig. 5 – Risposta in frequenza
L’esempio proposto è un pò particolare in quanto presenta una risposta limitata sia alle
basse che alle alte frequenza e con dei fenomeni di risonanza.
La classica definizione di banda utile individua l’intervallo di frequenze per le quali la
curva di risposta in frequenza risulta contenuta in una fascia di ±3dB rispetto al valore
di riferimento e corrispondente ad un errore di circa il ±35%.
Sono anche utilizzate la risposta in frequenza a ±1dB con un errore di circa il ±11% e la
risposta a ±0.1dB (detta flat) con un errore di circa il ±2%.
Nel caso in cui la risposta in frequenza non fosse espressa in dB ma in percentuale
rispetto al livello di riferimento, si definisce la banda utile come l’intervallo di
frequenze per le quali la curva di risposta in frequenza risulta contenuta nella fascia del
±10% oppure del ±5% o ancora del ±1%.
7
Trasduttori – A.C. Neve
Tempo di risposta
Le limitazioni evidenziate nella precedente sezione circa il comportamento in frequenza
di un trasduttore, determinano delle analoghe limitazioni anche nel dominio del tempo.
Non è infatti possibile che un trasduttore, sollecitato con un ingresso a gradino di
ampiezza pari al fondo scala, sia in grado di fornire una uscita della stessa forma e priva
di ritardo.
Ogni trasduttore raggiungerà il valore finale in un tempo più o meno lungo a secondo
delle sue specifiche caratteristiche costitutive e funzionali.
Il tempo di risposta è il tempo necessario all’uscita del trasduttore per raggiungere un
valore pari al 95% o al 98% del suo fondo scala quando è sollecitato con un ingresso a
gradino di ampiezza pari al suo stesso fondo scala come esposto in Fig. 1.6.
e(t)
Time response 98%
Time response 95%
100%
98%
95%
90%
63%
Time constant
10%
Rise time
t
Fig. 6 – Tempo di risposta
Tempo di salita
Il tempo di salita (rise time) è il tempo impiegato dall’uscita per passare dal 10% al 90%
del suo valore di fondo scala.
Questo valore è anche correlabile con la massima frequenza di lavoro de trasduttore
attraverso la nota relazione fMAX = 0.35/tr.
Costante di tempo
La costante di tempo (time constant) è il tempo impiegato dall’uscita del trasduttore per
raggiungere il 63% del valore di fondo scala.
Questo parametro è in analogia con la risposta al gradino di un sistema del primo ordine
per il quale si può ritenere che l’uscita si sia stabilizzata sul suo valore finale dopo un
tempo pari circa sette volte la costante di tempo con un errore dello 0.1%.
Slew rate
Lo slew rate rappresenta la velocità di variazione dell’uscita, il suo valore è fornito dalla
pendenza della curva di Fig. 1.6 ed è espresso in volt/millisecondo.
Il suo massimo valore fornisce indicazioni sulla massima rapidità di variazione
dell’uscita e quindi sul suo comportamento dinamico.
8
Trasduttori - A.C. Neve
Settling time
Non sempre il comportamento di un trasduttore può essere assimilato a quello di un
sistema del primo ordine. In molti casi l’uscita, sollecitata con un ingresso a gradino,
presenta delle oscillazioni smorzate (overshoot e undershoot) tipiche dei sistemi del
secondo ordine come sposto in Fig. 1.7.
e(t)
Error band
100%
Settling time
t
Fig. 7 – Settling time
La presenza di oscillazioni smorzate è indicativo dell’esistenza di fenomeni di risonanza
e la frequenza di queste oscillazioni corrisponde alla frequenza di oscillazione libera del
trasduttore.
Il settling time è l’intervallo di tempo compreso tra l’istante di primo ingresso del
segnale di uscita nella banda di errore e l’istante del suo ultimo ingresso.
Come si può notare dalla Fig. 1.7, il segnale di uscita entra ed esce più volte dalla banda
di errore
La misura del settling time è sempre riferita ad una certa banda di errore (error band) di
ampiezza pari al 5% o all’1% del fondo scala.
Trasduttori – A.C. Neve
9
Parametri ambientali
I parametri statici e dinamici in precedenza esaminati, definiscono le caratteristiche e le
prestazioni espresse dal trasduttore in condizioni non operative e cioè differenti da
quelle presenti nei luoghi di reale utilizzo.
L’interazione dei trasduttori con le grandezze ambientali presenti nel luogo di utilizzo
possono essere tali da fornire misure errate o perfino da rendere inutilizzabile quel tipo
di trasduttore.
Diventa quindi estremamente importante la ricerca e l’individuazione qualitativa e
quantitativa delle grandezze ambientali in grado di interagire con il trasduttore usato.
I più noti parametri ambientali da tenere sotto controllo sono:
•
•
•
•
•
•
•
•
Temperatura
Umidità
Pressione
Altitudine
Vibrazioni ed accelerazioni
Campi elettromagnetici
Radiazioni
Agenti corrosivi
Altri aspetti da non sottovalutare riguardano effetti del montaggio ed installazione, i
cavi utilizzati per i collegamenti ed i relativi connettori, le tensioni di alimentazione, le
schermature e le masse, gli effetti, sul sistema di misura, dovuti all’inserzione del
trasduttore stesso.
10
Trasduttori - A.C. Neve
Parametri di affidabilità
Questi parametri forniscono utili informazioni sulla costanza delle prestazioni offerte
dal trasduttore nel tempo.
La ripetibilità è la capacità del trasduttore di fornire la stessa uscita per ripetute
applicazioni dello stesso ingresso senza che il trasduttore sia sconnesso dal sistema di
misura.
La riproducibilità è la capacità del trasduttore di fornire la stessa uscita ogni qualvolta
gli venga applicato lo stesso ingresso.
La stabilità è la capacità del trasduttore di fornire la stessa uscita quando in ingresso è
applicato un valore costante per un certo periodo di tempo.
Un altro importante parametro riguarda il tempo di vita del trasduttore e può essere
definito in due modi:
La vita operativa è il minimo intervallo temporale durante il quale è garantita la piena
operatività del trasduttore senza modifiche delle sue prestazioni.
I cicli di vita rappresentano invece il numero minimo di applicazioni di escursioni
dell’ingresso pari al fondo scala che il trasduttore può garantire senza modificazioni
delle sue prestazioni.
Un altro parametro è l’aging rate che rappresenta la velocità di invecchiamento del
trasduttore o il tempo di lavoro durante il quale le prestazioni del trasduttore restano
invariate entro una certa percentuale.
A tal proposito, alcuni tipi di trasduttori richiedono delle operazioni di calibratura una
volta raggiunto un certo numero di ore di utilizzo.
Ponti per trasduttori resistivi
Al fine di rilevare l’entità delle grandezze fisiche, molti trasduttori fanno uso della
variazione di resistenza ohmmica della loro struttura che dovrà poi essere trasformata in
una grandezza elettrica proporzionale.
A tal proposito vengono utilizzati dei circuiti a ponte come quello esposto in Fig. 8.
i
L
D
R
R
Vin
I1
C
A
Eo
R
I2
L’elemento sensibile è rappresentato
dalla resistenza di valore R(1+∆)
dove ∆ rappresenta l’entità della
variazione di R.
R(1+ )
B
Fig. 8 – Ponte semplice
In questo circuito le correnti I1 e I2 assumono i seguenti valori:
I1 =
Vin
2R
I2 =
Vin
R + R (1 + ∆)
la tensione Eo sarà data da:
Eo = V AB − VBC
Eo = R(1 + ∆) ⋅ I 2 − R ⋅ I1
sostituendo i valori di I1 e I2 si otterrà:
Eo = R(1 + ∆ ) ⋅
Vin
Vin
R(1 + ∆ )
Vin
1+ ∆ 1
− R⋅
= Vin ⋅
−
= Vin ⋅
−
R + R(1 + ∆)
2R
R(1 + 1 + ∆)
2
2+ ∆ 2
2 + 2∆ − 2 − ∆
∆ Vin ∆
Eo = Vin ⋅
⋅
= Vin ⋅
=
∆
4 + 2∆
4
4 + 2∆
1+
2
nel caso in cui ∆ risultasse molto minore di 1 si otterrebbe che:
Eo ≈
Vin
⋅∆
4
dove il termine Vin/4 rappresenta la sensibilità.
12
Trasduttori - A.C. Neve
Un altro circuito, detto ponte doppio, è il seguente:
R(1+ )
Vin
I2
Eo
I1
R
In questo circuito si utilizzano due
trasduttori identici
R
R(1+ )
Fig. 9 – Ponte doppio
Le due correnti I1 e I2 assumono i seguenti valori:
I1 =
Vin
R + R(1 + ∆)
I2 =
Vin
R + R(1 + ∆)
la tensione Eo sarà data da:
Eo = R(1 + ∆) ⋅ I 2 − R ⋅ I1
sostituendo i valori di I1 e I2 si otterrà:
Eo = R(1 + ∆) ⋅
Vin
Vin
− R⋅
R + R(1 + ∆ )
R + R(1 + ∆)
1
1+ ∆
∆ Vin ∆
Eo = Vin ⋅
−
⋅
= Vin ⋅
=
2 1+ ∆
2+∆ 2+∆
2+∆
nel caso in cui ∆ risultasse molto minore di 1 si otterrebbe che:
Eo ≈
Vin
⋅∆
2
dove il termine Vin/2 anche ora rappresenta la sensibilità che però risulta doppia rispetto
al caso precedente.
13
Trasduttori – A.C. Neve
Un ulteriore circuito, detto ponte quadruplo, è il seguente:
R(1+ )
Vin
I1
R(1- )
I2
Eo
R(1- )
R(1+ )
In questo circuito vengono utilizzati
quattro trasduttori identici ma che
rispondono alle sollecitazioni in
modo opposto.
Due a incremento R(1+∆) e gli altri
due a decremento R(1-∆).
Fig. 10 – Ponte quadruplo
Le due correnti I1 e I2 assumono i seguenti valori:
I1 =
Vin
Vin
=
R(1 + ∆) + R(1 − ∆) 2 R
I2 =
Vin
Vin
=
R(1 − ∆) + R(1 + ∆) 2 R
la tensione Eo sarà data da:
Eo = R(1 + ∆) ⋅ I 2 − R(1 − ∆) ⋅ I1
sostituendo i valori di I1 e I2 si otterrà:
Eo = R(1 + ∆) ⋅
Vin
Vin
− R(1 − ∆) ⋅
2R
2R
R + R∆ − R + R∆
2 R∆
R + R∆ R − R∆
Eo = Vin ⋅
2 R = Vin ⋅
−
= Vin ⋅
2R
2R
2R
Eo = Vin ⋅ ∆
dove il termine Vin anche ora rappresenta la sensibilità che però risulta doppia rispetto
al caso precedente e quadrupla rispetto al ponte semplice, ma l’aspetto principale risiede
nella perfetta linearità su tutto il campo di valori di ∆ senza alcuna approssimazione.
14
Trasduttori - A.C. Neve
Molto spesso i trasduttori resistivi sono corredati di cavi anche abbastanza lunghi in
modo da poter essere collegati al sistema sotto misura.
Questi cavi presentano però una resistenza che, se pur piccola, può determinare degli
errori nella misura di Eo.
Si risolve questo problema utilizzando dei trasduttori detti a tre fili che vengono
collegati secondo quanto esposto nel circuito seguente dove le resistenze RF
rappresentano le resistenze dei fili del cavo di collegamento:
R
R
Vin
Eo
I1
R
A1
I2
RF
A2
I=0
I2
RF
RF
A3
Fig. 11 – Ponte per trasduttore a tre fili
Il circuito equivalente a quello precedente può essere così ridisegnato:
I2
I1
R
A2
R
RF
Vin
Eo
C
RF
I=0
A1
R(1+ )
R
RF
B
Fig. 12 – Circuito equivalente
R(1+ )
15
Trasduttori – A.C. Neve
Le due correnti I1 e I2 assumono i seguenti valori:
I1 =
Vin
2R
I2 =
Vin
R + 2 RF + R(1 + ∆)
la tensione E01 sarà data da:
E 01 = V A1B − VBC = [RF + R(1 + ∆)] ⋅ I 2 − R ⋅ I1
E 01 = [RF + R(1 + ∆)] ⋅
Vin
Vin
− R⋅
R + 2 RF + R(1 + ∆ )
2R
RF + R(1 + ∆)
1
E 01 = Vin ⋅
−
R + 2 RF + R(1 + ∆) 2
2 R + 2 R(1 + ∆ ) − R − 2 RF − R(1 + ∆ )
E 01 = Vin ⋅ F
4 RF + 2 R(2 + ∆)
Sviluppando e semplificando si ottiene:
E 01 =
R∆
4 RF + 2 R(2 + ∆)
Nell’ipotesi che ∆ << 2 e che RF << R si ottiene che:
E 01 ≈
Vin
⋅∆
4
Utilizzando invece la tensione E02 si ha che:
E 02 = V A 2 B − VB = [2 RF + R(1 + ∆)] ⋅ I 2 − R ⋅ I1
E 02 = [2 RF + R(1 + ∆)] ⋅
Vin
Vin
− R⋅
R + 2 RF + R(1 + ∆ )
2R
2 RF + R(1 + ∆)
1
E 02 = Vin ⋅
−
R + 2 RF + R(1 + ∆ 2
2 RF + R∆
E 02 = Vin ⋅
4 RF + 2 R(2 + ∆)
Nell’ipotesi che ∆ <<2 si ha che:
E 02 = Vin ⋅
2 R F + R∆
4( RF + R)
in questo caso l’ipotesi RF << R non conduce alla semplificazione del numeratore in
quanto RF è moltiplicato per 2 ma soprattutto perché R è moltiplicato per ∆ che è
sempre molto piccolo in tutti i trasduttori. A differenza del caso precedente, si introduce
così un errore dovuto alla presenza della resistenza RF dei cavi.
16
Trasduttori - A.C. Neve
Amplificatori per ponti di misura
R1
R(1+ )
R
Vin
R
+Vcc
Vout
-Vcc
R
R1
Fig. 13 – Amplificatore per ponte semplice
In questo tipo di circuito solo se R1 >> R e se ∆ << 2 si ha che:
Vout ≈
Vin ⋅ R1
⋅∆
4R
R
R(1+ )
+Vcc
Vout
R
-Vcc
Vin
R1
Fig. 14 – Amplificatore per ponte semplice lineare
Per questo tipo di circuito si ha che:
Vout =
Vin ⋅ R1
⋅∆
R + R1
come si può notare la risposta è lineare per tutti i valori di ∆.
17
Trasduttori – A.C. Neve
R1
R(1+ )
R(1- )
+Vcc
Vout
-Vcc
Vin
R(1- )
R(1+ )
R1
Fig. 15 – Amplificatore per ponte quadruplo
In questo tipo di circuito solo se R1 >> R si ha che:
Vout =
Vin ⋅ R1
⋅∆
R
anche in questo case la risposta è lineare per tutti i valori di ∆.
R
R
Rc
Rc
Vin
Rc
R
R1
R1
+Vcc
Vout
-Vcc
Fig. 16 – Amplificatore per ponte semplice con sensore remoto
In questo tipo di circuito solo se R1 >> R e se ∆ << 2 si ha che:
Vout ≈
Vin ⋅ R1
⋅∆
4R
In tutti i casi Vin dovrà risultare stabile e precisa.
R(1+ )
18
Trasduttori - A.C. Neve
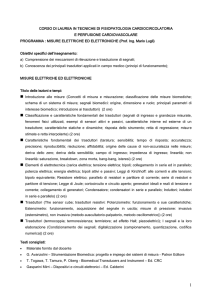
Potenziometri
Il potenziometro è una resistenza il cui valore può essere variato per mezzo dello
spostamento di uno contatto mobile strisciante.
Possono essere lineari o angolari e la parte resistiva può risultare a strato o a filo.
In quelli a strato la risoluzione può essere considerata infinita ma non così per quelli a
filo.
Fig. 17 – Potenziometri a filo lineare e angolare
La lunghezza totale del filo usato sarà data dal prodotto tra il numero di spire per la
lunghezza della singola spira:
L = N spire ⋅ Lspira
la resistenza totale del filo sarà data dalla legge di Ohm:
RTOT =
ρ
ρ
⋅ L = ⋅ Lspira ⋅ N spire = Rspira ⋅ N spire
S
S
con ρ resistività del materiale ed S area della sezione del filo.
La risoluzione sarà data quindi dalla resistenza della singola spira Rspira ed il valore della
resistenza variabile sarà quindi esprimibile dalla relazione
R (n) = Rspira ⋅ n
con n che indica l’ennesima spira in contatto con il cursore mobile.
Si noti quindi che la variazione di resistenza è discreta e si evolve secondo una
gradinata il cui gradino ha una altezza pari a Rspira
Nel caso dei potenziometri a strato la variazione di resistenza risulta continua.
L’utilizzo dei potenziometri per le misure di spostamento si attua per mezza del
seguente circuito:
19
Trasduttori – A.C. Neve
RT = resistenza totale
RX = resistenza nel punto di contatto
RL = resistenza di carico del circuito
Vcc
RT
L
Rx
Lx
RL
Vout
Fig. 18 – Circuito potenziometrico
Nel caso ideale di assenza della resistenza di carico RL la tensione di uscita risulta:
Vout =
Vcc
Vcc
⋅ RX =
⋅ LX
RT
L
quindi proporzionale allo spostamento e con una sensibilità S = Vcc/L
Si noti che variando Vcc si può variare la sensibilità, restando però nei limiti della
dissipazione di potenza consentita dal potenziometro.
Nel caso di reale utilizzo di un potenziometro, l’uscita risulterà sempre collegata ad un
carico RL per cui la situazione diventa la seguente:
R X // RL
Vout = Vcc ⋅
= Vcc ⋅
( RT − R X ) + ( R X // R L )
LX
L
L L R
1 + 1 − X ⋅ X ⋅ T
L L RL
che risulta lineare solo per RL = ∞ come si può notare dalla figura seguente:
Fig. 19 – Risposta di un potenziometro da 1000 Ω con diversi valori di RL
20
Trasduttori - A.C. Neve
Encoder
Gli encoder sono dei trasduttori di posizione digitali elettromeccanici.
Possono essere lineari o angolari e, a loro volta, assoluti o relativi.
Il processo di trasformazione della posizione viene detto encoding (cioè codifica),
questo processo è di tipo discreto e definisce la risoluzione dell’encoder stesso.
L’entità della risoluzione dell’encoder definisce così la precisione ottenibile nelle
misure di posizione.
Gli encoder assoluti forniscono in uscita un codice esattamente proporzionale alla
posizione facendo uso del codice Gray il quale consente l’eliminazione dei codici errati
dovuti alle commutazioni contemporanee di più bit.
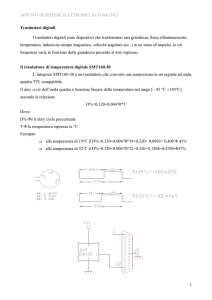
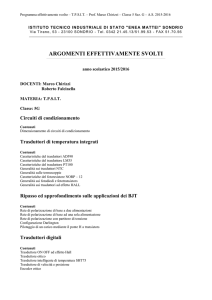
Fig. 20 – Encoder angolari assoluti Gray a 4 bit e 10 bit
Gli encoder proposti in figura sono costituiti da un disco in vetro o metallo dotato di un
certo numero di corone circolari aventi delle zone opache che definiscono, radialmente,
il codice corrispondente alla posizione assoluta dell’albero che viene mantenuta anche a
encoder spento.
La posizione viene rilevata per mezzo di fototransistor montati su una barra fissa e
disposta radialmente in corrispondenza delle varie corone circolari.
La precisione ottenibile dipende dal numero di bit (quindi dal numero di corone
circolari). Nel caso di un encoder a 10 bit sarà pari a 360/210 = 0.35 gradi ma può essere
anche molto maggiore.
0
0
0
0
1
0
0
0
1
1
0
0
0
1
0
0
0
1
1
0
1
1
1
0
1
0
1
0
0
0
1
0
0
0
1
1
1
0
1
1
1
1
1
1
0
1
1
1
0
1
0
1
1
1
0
1
1
0
0
1
0
0
0
1
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Fig. 21 – Encoder lineare assoluto a 4 bit Gray
Gli encoder relativi hanno una struttura più semplice, sono infatti costituiti da una sola
corona circolare caratterizzata da un certo numero di settori alternativamente opachi e
trasparenti la cui rilevazione avviene per mezzo di due soli fototransistor.
21
Trasduttori – A.C. Neve
Fig. 22 – Encoder relativo con sistema di fotorilevazione
Binary Out
Il numero di impulsi rilevati determina la variazione di spostamento rispetto alla
precedente posizione che non potrà essere però memorizzata dopo lo spegnimento.
È possibile determinare il senso di rotazione del disco facendo uso di due fototransistor
disposti in modo da risultare sfasati di ¼ del periodo di ripetizione dei settori (90°).
Viene anche predisposto un singolo settore per la misura dei giri compiuti.
L’elettronica di controllo è esposta nella figura seguente.
U/D Counter
Va
Vb
Ck
Up/Down
D Q
F/F
Ck
Va
t
Vb
Q
1
0
t
ORARIO
ANTIORARIO
t
Fig. 23 – Elettronica di controllo per encoder relativo
22
Trasduttori - A.C. Neve
I segnali Va e Vb provengono dai due sensori sfasati di 90° i quali pilotano un Flip/Flop
ed un contatore Up/Down per cui le uscite binarie saranno incrementate o decrementate
a secondo del verso di rotazione.
Un encoder di questo tipo potrà essere anche utilizzato per misure di velocità facendo
uso di un solo fototransistor per mezzo del quale si rileva la frequenza degli impulsi che
risulterà proporzionale alla velocità di rotazione.
Le uscite digitali possono essere sia seriali che parallele e in tensione o corrente e da un
punto di vista elettrico possono risultare:
NPN open collector o normale
PNP open collectorr o normale
Push Pull
Line Driver normale o differenziale
Si consiglia sempre l’utilizzo di cavi schermati twisted con lunghezze non superiori a 50
metri con schermatura esterna generale.
23
Trasduttori – A.C. Neve
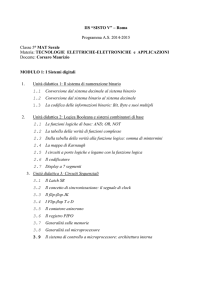
L.V.D.T.
L’LVDT (Linear Variable Differential Transformer) è un trasduttore di posizione che
utilizza un trasformatore differenziale a nucleo mobile.
É un trasduttore robusto, affidabile con elevata linearità e risoluzione.
Il trasformatore è costituito da un primario e due secondari identici che vengono
collegati in serie ma in modo che le tensioni indotte su di essi siano sfasate di 180°.
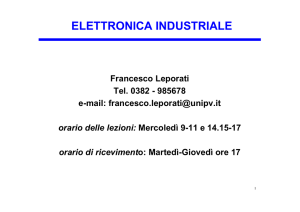
Fig. 24 – Sezione e esempio di un LVDT
Quando il nucleo mobile è
disposto esattamente al centro
del cilindro cavo, le due tensioni
E1
ed
E2
risulteranno
esattamente uguali ma, essendo
in opposizione di fase, la loro
somma risulterà nulla.
Spostando invece a destra o a
sinistra il nucleo mobile si avrà
una prevalenza di E1 su E2 o
viceversa ottenendo in uscita
una tensione positiva o negativa.
Fig. 25 – Circuito di principio
Vout
-100%
+100%
Fig. 26 - Caratteristica di trasferimento
Spostamento relativo
24
Trasduttori - A.C. Neve
L’eccitazione del primario avviene con una tensione sinusoidale di alcuni volt e con una
frequenza compresa tra 1KHz e 50 KHz, questa tensione dovrà avere una stabilità
migliore della precisione che si vuole ottenere dalla misura stessa.
Questi trasduttori hanno una linearità compresa tra 0.05% e 0.5% del fondo scala il
quale può variare da alcuni millimetri fino ad alcuni decimetri.
Sono disponibili in commercio dei circuiti integrati che assolvono a tutte le funzioni
necessarie per il pilotaggio e trattamento del segnale generato da questi trasduttori.
Fig. 27 – Applicativo NE5520 Philips
Fig. 28 – Applicativo AD598 Analog Devices
Trasduttori – A.C. Neve
25
Estensimetri (Strain Gauge)
Gli estensimetri sono dei trasduttori di deformazioni prodotte da sforzi applicati a
strutture di parti meccaniche durante il loro funzionamento.
Hanno campi di applicazione molto vasti (navi, auto, aerei, tremi, edifici, ponti,
macchine industriali ecc.) con risoluzione della misura della deformazione che può
raggiungere l’ordine dei micron.
Consentono la rilevazione di deformazioni sia statiche che dinamiche fino a frequenze
di diverse migliaia di hertz.
Possono essere di diversi tipi: meccanici, ottici, acustici e capacitivi ma quelli più
diffusi sono quelli resistivi.
Il loro principio di funzionamento è basato sul fatto che l’allungamento di un filo
metallico produce una variazione della sua resistenza che risulta proporzionale
all’allungamento stesso.
Sono costituiti da griglie di fili di leghe metalliche o semiconduttori fotoincisi su
supporti che vengono poi incollati sul dispositivo sotto test.
Fig. 28 – Esempio di strain gauge lineare
Nei limiti di validità della legge di Hooke sulle deformazioni elastiche si ha che:
F=
∆L
⋅E
L
con: F = sforzo [Kg/mm2]
∆L/L = allungamento relativo
E = modulo di Young [Kg/mm2]
quindi, in regime di linearità (deformazioni elastiche), l’allungamento relativo risulta
proporzionale allo sforzo applicato.
Si vedrà in seguito come la variazione relativa della resistenza elattrica risulta
proporzionale alla deformazione relativa.
26
Trasduttori - A.C. Neve
Si consideri ora un filo di lunghezza L e diametro D.
Se sottoposto a trazione questo si allunga ma contemporaneamente si restringe secondo
un rapporto costante purché nei limiti di linearità delle deformazioni elastiche si ha
infatti che:
∆D
µp = − D
∆D
∆L
⇔
= −µ p ⋅
∆L
D
L
L
con µp detto modulo di Poisson che risulta circa uguale a 0.3.
Si consideri ora un conduttore
cilindrico di lunghezza L e sezione
A il quale presenterà una
resistenza longitudinale pari a:
Fig. 29 – Deformazione lineare e radiale
R= ρ⋅
L
A
con ρ resistività del materiale usato
passando ai logaritmi e differenziando si ha che:
dR dρ dL dA
=
+
−
R
ρ
L
A
ricordando che A = πD2/4 e differenziando si ha che:
dA
dD
∆L
= 2⋅
= −2 ⋅ µ p ⋅
A
D
L
sostituendo nella precedente si ottiene che:
dR dρ dL
dL dρ
dL
=
+
+ 2⋅µp ⋅
=
+ (1 + 2 µ p ) ⋅
R
ρ
L
L
ρ
L
dR
= (1 + 2µ p ) +
R
dρ
dL
ρ dL
⋅
=K⋅
dL L
L
L
con K costante di proporzionalità detto Gauge Factor o fattore di taratura.
Trasduttori – A.C. Neve
27
Negli estensimetri metallici il termine (1+2µp) è detto sensibilità e vale circa 1.6 mentre
il termine (dρ/ρ)/(dL/L) rappresenta la piezoelettricità ed assume un valore compreso
tra 0.1 e 2.
Negli estensimetri a semiconduttore il valore della piezoelettricità può arrivare a diverse
centinaia incrementando così la sensibilità ma risultando però molto più sensibili alle
variazioni di temperatura.
Esempio numerico:
si consideri un estensimetro avente R = 120Ω, K = 2.5 ed una
lunghezza L = 10 mm.
Se durante l’applicazione della sollecitazione si ha un
allungamento di 10 µm si ottiene che:
∆L 20 ⋅ 10 −6
=
= 2 ⋅ 10 −3
−3
L 10 ⋅ 10
∆L
∆R = R ⋅ K ⋅
= 120 ⋅ 2.5 ⋅ 2 ⋅ 10 −3 = 0.6Ω
L
Particolarmente delicato è il comportamento dell’estensimetro al variare della
temperatura la quale è in grado di modificare diversi parametri dell’estensimetro.
Premesso che il valore del gauge factor K viene determinato statisticamente dal
produttore su un certo numero di campioni e relativamente ad una certa temperatura.
Al variare della temperatura di utilizzo dell’estensimetro anche il valore di K varierà
secondo il proprio coefficiente di temperatura βk per cui si avrà che:
K T = K ⋅ (1 + β k ⋅ ∆T )
Si deve poi prendere in considerazione la variazione di resistenza relativa ∆R/R del
materiale che costituisce la griglia estensimetrica con la temperatura attraverso il valore
del coefficiente di temperatura βT del materiale stesso:
∆R
= β T ⋅ ∆T
R ∆T
E’ infine necessario tenere conto della diversa dilatazione termica del materiale sotto
test e del materiale dell’estensimetro che, insieme, determinano una deformazione
apparente.
Un aumento di temperatura determina una deformazione del materiale sotto test pari a
βm∆T. Se l’estensimetro fosse libero si dilaterebbe di una quantità pari a βe∆T ma
essendo incollato al campione sotto test subirà la stessa dilatazione.
Si avrà quindi una deformazione termica differenziale pari a:
∆L
= ( β m − β e ) ⋅ ∆T
L β
28
Trasduttori - A.C. Neve
Considerando tutti questi effetti si avrà che:
∆R
∆L
= KT ⋅
+ K T ⋅ ( β m − β e ) ⋅ ∆T + β T ⋅ ∆T
R
L
Per contenere il più possibile questi effetti è opportuno utilizzare estensimetri poco
sensibili alla temperatura ( βk e βT molto bassi) e con un coefficiente di dilatazione
termica il più possibile uguale a quello del campione sotto test.
Sono attualmente disponibili estensimetri autocompensati che assicurano un errore
termico inferiore all’1%.
Da non sottovalutare poi le variazione termiche di resistenza dei cavi di collegamento.
Gli estensimetri sono disponibili in commercio in varie forma e dimensioni per poter
soddisfare la più svariate situazioni di misura e possono essere: lineari ad asse singolo o
ad assi paralleli, a rosetta a 2 o 3 assi con varie angolazioni, e in array.
Fig. 30 – Esempi di estensimetri commerciali
I valori resistivi più diffusi sono 120Ω e 350Ω ma sono disponibili anche valori
superiori fino al migliaio di ohm.
29
Trasduttori – A.C. Neve
Altri parametri caratteristici risultano:
Resistenza
Gauge Factor
Linerità
Cicli di vita
Temperatura
Estensimetri
metallici
120, 350, 600, 1000 Ω
1.6 ÷ 2.5
0.05 ÷ 1 %
107
-30° ÷ +100°
Estensimetri a
semiconduttore
120Ω
100 ÷ 500
1%
106
-20° ÷ +60°
I sistemi di misura per l’utilizzo di questi trasduttori sono basati sul ponte di
Wheatstone nelle sue diverse versioni a 1, 2 e 4 estensimetri come già analizzati in
precedenza e riproposti nelle figure seguenti:
Fig. 31 – Ponti di misura per estensimetri
Particolare attenzione richiede l’operazione di incollaggio dell’estensimetro in quanto
quest’ultimo dovrà poter seguire le stesse deformazioni del campione sotto test.
La quantità di collante usato non dovrà essere troppo poca perché non si avrebbe una
adesione omogenea sul campione ma neppure eccessiva in quanto determinerebbe la
formazione di una strato elastico che impedirebbe all’estensimetro di dilatarsi in modo
solidale con il campione sotto misura.
Il collante dovrà anche assicurare un totale isolamento elettrico dell’estensimetro.
Prima dell’incollaggio è necessaria una accurata pulizia, sia meccanica che chimica,
della superficie sulla quale sarà incollato l’estensimetro facendo uso di collanti
dipendenti dalla tipologia delle prove , dalla loro durata e dalle condizioni al contorno.
Si possono usare resine epossidiche, cianocrilati,poliesteri e materiali ceramici.
30
Trasduttori - A.C. Neve
Un altro accorgimento riguarda la saldatura dei cavi che dovranno essere fissati su delle
piazzole ausiliarie sulle quali convergono i terminali dell’estensimetro e quelli dei cavi
di collegamento in modo da evitare che eventuali strappi possano danneggiare
l’estensimetro.
É infine necessario applicare una protezione che incapsuli l’estensimetro lo protegga da
agenti esterni e ne prolunghi la vita.
Fig. 32 – Esempio di protezione
Trasduttori – A.C. Neve
31
Termocoppie
Le termocoppie rappresentano i più semplici, robusti, ed economici trasduttori di
temperatura in grado di operare su ampi intervalli di temperatura.
Il loro funzionamento di basa sull’effetto Seebeck (1821) in base al quale: se in un
circuito costituito da due fili di differenti metalli saldati agli estremi si riscalda una delle
due saldature, si ha un passaggio di corrente.
Se invece il circuito viene aperto, ai capi della giunzione si genera una tensione il cui
valore risulta funzione della temperatura della giunzione e del tipo di metalli.
Fig. 33 – Effetto Seebeck
Per piccole variazioni di temperatura si ha una buona linearità tra le tensione EAB ed il
valore della temperatura tale che:
∆E AB = α ⋅ ∆TK
con α pari al coefficiente di Seebeck che è tipico dei materiali usati [µV/°C].
Il primo problema che si incontra nell’utilizzo di questi trasduttori risiede
nell’impossibilità di misurare direttamente la tensione di Seebeck poiché l’inserimento
di un voltmetro comporterebbe la creazione di due nuove giunzioni termoelettriche.
Infatti, facendo uso di una termocoppia Rame(Cu) – Costantana(C) ed un voltmetro con
i terminali in rame si può notare la formazione di due nuove giunzioni J2 e J3.
Fig. 34 – Misura con termocoppia Cu-C (tipo T)
32
Trasduttori - A.C. Neve
Poiché la giunzione J3 è di tipo Cu-Cu, la tensione termoelettrica da essa generata è
nulla quindi V3=0, non così però per la giunzione J2 del tipo C-Cu la quale genera una
tensione V2 in opposizione a V1.
Il voltmetro misurerà quindi una tensione proporzionale alla differenza tra le due
temperature T1 e T2.
Questo problema può essere risolto facendo in modo che la temperatura T2 risulti
costante e nota con precisione per esempio ponendo la giunzione J2 in un bagno di
ghiaccio a °0. Si introduce quindi il cosiddetto giunto freddo di riferimento.
Fig. 35 – Giunto freddo di riferimento
In queste condizioni si ha che:
V = V1 − V2 ≅ α ⋅ (TK 1 − TK 2 )
esprimendo la temperatura in gradi Celsius si ha che:
V = α ⋅ [(T1°C + 273.15) − (T2°C + 273.15)] = α ⋅ [T1°C − T2°C ] = α ⋅ [T1°C − 0] = α ⋅ T1°C
si fa notare che V2 non è pari a zero in quanto è funzione della temperatura assoluta ora
però la temperatura è riferita a 0°C.
Il bagno di ghiaccio, per quanto scomodo, è un ottimo riferimento termico consigliato
dal National Bureau of Standard (NBS) il quale fornisce anche le tavole dei fattori di
conversione per i vari tipi di termocoppie in commercio.
Un caso un po’ più complesso si determina quando si utilizza una termocoppia di tipo J
Ferro(Fe) – Costantana(C).
In questo caso l’applicazione di un voltmetro comporta la generazione di due nuove
giunzioni del tipo Cu-Fe come di nota dalla figura seguente.
Trasduttori – A.C. Neve
33
Fig. 36 – Termocoppia tipo J (Fe-C)
Affinché le due nuove giunzioni non introducano errori, queste vengono inserite in un
blocco isotermico costituito con del materiale elettricamente isolante ma dotato di una
elevata conducibilità termica tale quindi da garantire una uniforme distribuzione del
calore al suo interno per cui risulterà che:
T3 = T4 ⇒ V3 = V4
essendo tra loro in opposizione, si avrà così il reciproco annullamento da cui:
V = α ⋅ (T1 − 0)
il circuito applicativo risulterà il seguente:
Fig. 37 – Blocco isotermico
É possibile semplificare il sistema inserendo in un unico blocco isotermico le tre
giunzioni J2, J3 e J4.
34
Trasduttori - A.C. Neve
Fig. 38 – Blocco isotermico complessivo
Per la legge empirica dei metalli si ha poi che:
Fig. 39 – Legge empirica dei metalli
Inserendo un terzo metallo tra i due metalli di una giunzione di termocoppia, non si
altera la tensione di uscita se le due nuove giunzioni dono alla stessa temperatura.
Si ha quindi il seguente circuito equivalente:
Fig. 40 – Circuito equivalente del blocco isotermico
Trasduttori – A.C. Neve
35
La tensione misurata sarà quindi:
V = α ⋅ (T1 − TREF ) ⇒ ∆V = α ⋅ ∆T1
in questa soluzione il blocco isotermico rappresenta poi il classico connettore standard
per termocoppie.
Fig. 41 – Connettori per termocoppie
Il passo successivo sarebbe quello di misurare la temperatura del blocco isotermico ed
usare questa temperatura per poi determinare quella cercata T1.
Questa operazione può essere effettuata sia per via software che per via hardware, in
entrambi i casi è però necessario conoscere la temperatura del blocco isotermico per es.
per mezzo di un sensore ausiliario inserito nel blocco isotermico.
Questo sensore potrà essere molto meno robusto ed in grado di operare in range termici
molto più contenuti.
Per via software: si utilizza il valore della temperatura TREF per determinare il valore
VREF della tensione dovuta alla giunzione di riferimento, si misura poi il valore della
tensione V e gli si sottrae VREF ottenendo così l’effettivo valore della tensione V1.
Per via hardware: si fa uso di un circuito il quale, per mezzo della lettura di TREF (e
quindi di VREF), genera una tensione uguale ed opposta alla stessa VREF cos’ da ottenere
l’effettivo valore V1. In queste condizioni TREF può assumere qualsiasi valore.
Fig. 42 – Compensazione hardware
36
Trasduttori - A.C. Neve
Un circuito applicativo proposto dalla Analog Devices è il seguente:
Fig. 43 – Utilizzo pratico di una termocoppia
AD592
AD1403
OP-07E
Low cost Precision IC temperature trasducer – 25 ÷ 105 °C – sens. 1µ A/K – lin. 0.15°C –
accur. 0.5°C – Vcc 4÷30 volt
Low cost Precision 2.5 voltIC reference – 2.500 ±10mV – stab. 25 ppm/°C
Ultra low offset Op. Amp. – off. volt 10µV – off. drift 0.2 µV/°C
Le resistenze R1 ed R2 determinano il guadagno
dell’amplificatore non invertente.
Il trimmer dovrà essere tarato per avere un valore di
uscita Vout corrispondente ad una temperatura nota ed
intermedia agli estremi di misura.
Tipo di termocoppia
Simboli ANSI
J
K
T
E
S
R
R(Ω)
52
41
41
61
6
6
A questo punto si dispone così di una tensione che non dipende più da quella del giunto
di riferimento ma dipende solo dalla temperatura del giunto di misura.
É ora necessario convertire questa tensione nel corrispondente valore di temperatura,
sfortunatamente però il legame tra temperatura e tensione non è lineare ed anche il
coefficiente di Seebeck è funzione non lineare della temperatura come si può osservare
dalle figure seguenti.
37
Trasduttori – A.C. Neve
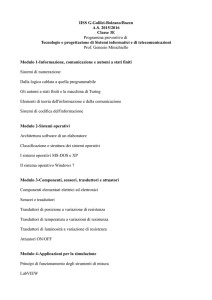
Fig. 44 – Andamento della tensione di uscita e del coefficiente di Seebeck
Come si può notare il miglior comportamento risulta quello della termocoppia tipo K
nell’intervallo di temperatura compreso tra 0 1000 °C.
Tipo di termocoppia
Simboli ANSI
J
K
T
E
S
R
Coefficiente di Seebeck
Rif. 20°C (µV/°C)
52
40
41
61
6
6
La miglior tecnica per convertire in temperatura la tensione misurata è quella di far uso
delle tabelle NBS di conversione standard utilizzandole come table lookup dopo averle
memorizzate in un computer. L’elevata occupazione di memoria rende però questa
tecnica poco efficiente.
Una tecnica più efficiente utilizza una approssimazione polinomiale del tipo:
T (V ) = A0 + A1 ⋅ V + A2 ⋅ V 2 + A3 ⋅ V 3 + ............ AN ⋅ V N
maggiore è il grado di precisione è più elevata sarà la precisione ottenibile.
I valori dei coefficienti Ai sono disponibili in tabelle standard per i vari tipi di
termocoppie E, J, K, R, S, e T nel seguito riportate.
Nella tabella sono riportati i valori dei vari coefficienti che, negli intervalli di
temperatura dichiarati, forniscono la precisione riportata.
Al di fuori degli intervalli dichiarati, la precisione dell’approssimazione polinomiale
comincia rapidamente a ridursi e non può essere ulteriormente migliorata.
38
Trasduttori - A.C. Neve
Tipo E
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
Ni(10%)Cr–C
-100 a 1000 °C
±0.5 °C
0.104967248
17189.45282
-282639.0850
19695339.5
-448703084.6
1.10866 E+10
-1.76807 E+11
1.71842 E+12
-9.19278 E+12
2.06132 E+13
+viola/bianco-
Tipo J
Tipo R
Tipo S
Tipo T
Fe – C
Ni(10%)Cr–Ni(5%)
0 a 760 °C
0 a 1370 °C
±0.1 °C
±0.7 °C
-0.048868252
0.226584602
19873.14503
24152.10900
-218614.5353
67233.4248
11569199.78
2210340.682
-264917531.4
-860963914.9
2018441314
4.83506 E+10
-1.18452 E+12
1.386690 E+13
-6.33708 E +13
Tipo K
Pt(13%)Rh–Pt
0 a 1000 °C
±0.5 °C
0.263632917
179075.491
-48840341.37
1.90002 E+10
-482704 E+12
7.62091 E+14
-7.20026 E +16
3.71496 E+18
-8.03104 E+19
Cu – C
-160 a 400 °C
±0.5 °C
0.100860910
25727.94369
-767345.8295
78025595.81
-9247486589
6.97688 E+11
-2.66192 E+13
3.94078 E+14
+nero/bianco-
+arancio/bianco-
Pt(10%)Rh–Pt
0 a 1750 °C
±1 °C
0.927763167
169526.5150
-31568363.94
8990730663
-1.63565 E+12
1.88027 E+14
-1.37241 E+16
6.17501 E+17
-1.56105 E+19
1.69535 E+20
+arancio/bianco-
+verde/bianco-
+marron/bianco-
C = Costantana - Colori IEC 584-3
Il tempo di risposta di una termocoppia è definito come il tempo necessario alla
tensione di uscita a raggiungere il 63.2% del valore massimo quando è sottoposta ad
uno sbalza termico pari al suo fondo scala termico.
Questo valore dipendo da molti fattori: le dimensioni, la forma, i materiali ed il tipo di
materiali in cui è immersa. Questo tempo può oscillare da 0.005 sec fino a 20 sec.
Altri problemi inerenti l’uso delle termocoppie riguardano il rumore, la calibrazione, i
connettori, i cavi di collegamento e la qualità dell’isolante.
Dal punto di vista costitutivo le termocoppie si presentano come un bastoncino di
metalli con diametro di pochi millimetri e lunghezza da 10 a 30 centimetri ad eccezione
del tipo subminiatura realizzato con una sferetta di frazione di millimetro.
Possono anche essere a giunzione esposta, giunzione a massa e giunzione isolata la cui
scelta dipende dal tipo di applicazione.
I cavi di collegamento ed i connettori hanno dei colori definiti da vari enti di
standardizzazione ( NITS,ANSI, DIN, IEC).
Trasduttori – A.C. Neve
Fig. 45 – Esempi di termocoppie
39
40
Trasduttori - A.C. Neve
RTD (Resistance Temperature Detector)
Questi trasduttori sfruttano la proprietà che hanno i metalli di aumentare la loro
resistività con la temperatura a causa dell’incremento dell’agitazione termica degli
elettroni durante il loro flusso all’interno del reticolo cristallino.
Questo fenomeno determina l’esistenza di un coefficiente di temperatura positivo.
Volendo sfruttare questo fenomeno per effettuare delle misure di temperatura, è
opportuno far uso di materiali aventi elevato coefficiente di temperatura, elevata
resistività ed elevata temperatura di fusione.
Il materiale più utilizzato per la costruzione di questi dispositivi è il platino al 99.999%
in quanto presenta un alto valore del coefficiente di temperatura, una elevata resistività,
un ampio range di temperature di lavoro ed una buona resistenza agli agenti corrosivi.
Il suo coefficiente medio di temperatura tra 0 e 100°C è pari a 0.00385055 °C-1.
Costitutivamente sono prodotti in filo libero o solenoide avvolto, incapsulati in tubi di
metallo, vetro o ceramica ed infine anche in forma di film sottile depositato su supporto
ceramico e tarato a laser.
Questi ultimi oltre ad avere dimensioni particolarmente ridotte hanno anche un rapido
tempo di risposta.
In alternativa si usa il nichel o sue leghe e, per temperature particolarmente elevate, il
tungsteno anche se questo è di difficile lavorabilità.
Fig. 46 – Esempi di RTD
I valori disponibili in commercio sono da 25, 100, 500 e 1000 ohm ma quello più
diffuso è il Pt100 definito da IEC 751-1983 con un range di temperatura che si estende
da –200 °C fino a +650 °C.
La dipendenza del valore resistivo dalla temperatura è non lineare ma può essere
linearizzato con una approssimazione polinomiale dovuta a Callender-Van Dusen che
però prevede la divisione del range termico in due parti: uno positivo ed uno negativo.
I coefficienti del polinomio risultano:
Ro = 100 ohm
A = 3.9083 10-3 °C-1
B = -5.775 10-7 °C-2
C = -4.18310-13 °C-4
La variazione di resistenza per un Pt100 è di circa 0.39 Ω/°C.
41
Trasduttori – A.C. Neve
-200°C < T < 0°C
[
R (T ) = Ro 1 + AT + BT 2 + C ⋅ (T − 100)T 3
]
0°C ≤ T ≤ 960°C
[
R (T ) = Ro 1 + AT + BT 2
]
Una volta effettuata la misura di resistenza, la temperatura corrispondente può essere
determinata per mezzo delle tabelle di conversione oppure attraverso l’inversione del
polinomio:
42
Trasduttori - A.C. Neve
0°C ≤ T ≤ 900°C
T ( R) =
− RoA + Ro 2 A 2 + 4 RoB( Ro − R (T )
2 RoB
Per applicazioni di alta precisione è stato poi sviluppato un polinomio del 20° ordine.
In questi trasduttori il valore della temperatura viene misurata in forma indiretta
attraverso il rilevamento della tensione ai capi dell’RTD che viene percorso da una
corrente costante ed usando poi la legge di Ohm R=V/I.
La corrente utilizzata per il pilotaggio dell’RTD dovrebbe risultare molto piccola per
minimizzare l’autoriscaldamento dell’RTD stesso. L’errore di autoriscaldamento è di
circa ½ °C per milliwatt in aria libera.
Il valore di 1mA è considerato un buon compromesso producendo una tensione di
100mV su un Pt100 a 0°C.
Un problema da non sottovalutare riguarda la resistenza del cavi esterni di collegamento
dell’RTD i quali possono introdurre un significativo errore nella misura.
Un Pt100 a 0°C presenta una resistenza da 100 ohm, ma se i due cavi hanno una
resistenza a 1 ohm ciascuno si ottiene, con un RTD a 2 fili, un valore di resistenza di
102 ohm che corrisponde ad una temperatura di circa 5°C.
Si consiglia poi di far uso di cavi schermati twisted-pair.
I metodi di misura generalmente utilizzati sono quelli a ponte pilotati in corrente e con
resistenze a basso coefficiente di temperatura.
Gli RTD possono essere a 2,3, e 4 fili.
Un ponte con RTD a 2 fili (vedi Fig. 8) è usato in molte applicazioni industriali che non
richiedono elevata accuratezza.
In questo caso il valore di resistenza misurato è dato da [R(T) + (RF1 + RF2)] con RF1 e
RF2 pari al valore resistivo dei due cavi di collegamento dell’RTD.
Trasduttori – A.C. Neve
43
Al fine di contenere l’errore, è opportuno far uso di cavi molto corti o di RTD con
elevato valore ohmmico (500 o 1000 ohm).
Una soluzione più conveniente è quella del ponte con RTD a 3 fili (vedi Fig. 11) per il
quale il valore di resistenza misurato è pari a [R(T) + (RF1 - RF2)] per cui facendo uso di
cavi compensati (RF1 ≅ RF2) si ha una notevole riduzione dell’errore.
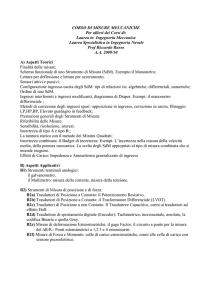
Una soluzione che offre la maggiore accuratezza è quella con l’RTD a 4 fili.
Fig. 47 – RTD a 4 fili
In questo caso le resistenze dei cavi e le loro variazioni termiche non introdurranno
alcun errore ed il voltmetro misurerà l’effettiva tensione ai capi dell’RTD.
Lo standard IEC 751, per il Pt100 al platino, definisce due classi di tolleranza A e B:
Classe A: ∆T(°C) = ±(0.15 +0.002•T)
Classe B : ∆T(°C) = ±(0.30 +0.005•T)
La classe A viene utilizzata per applicazioni nel range di temperatura compreso tra –200
e +650 °C e con RTD a 3 o 4 fili.
La classe B copre invece l’intero range termico da – 200 a + 850 °C
Dal punto di vista della stabilità, gli RTD al platino possono garantire 0.05 °C/anno
operando su un ampio range termico e di 0.01 °C/anno operando su medio range.
Il problema della linearizzazione della risposta di un RTD può essere affrontato anche
con tecniche puramente analogiche.
Dalle precedenti considerazioni emerge che il coefficiente di temperatura dell’RTD
decresce all’aumentare della temperatura determinando così il massimo errore al centro
dell’intervallo di temperatura e corrispondente ad una non linearità del secondo ordine.
Quando l’RTD è pilotato in corrente la tensione ai suoi capi risulta proporzionale alla
sua resistenza e così pure la non linearità.
Se invece la corrente di pilotaggio viene gradualmente ridotta man mano che la
temperatura aumenta, la non linearità viene notevolmente contenuta.
L’idea è quindi quella di modificare la corrente nell’RTD usando l’uscita di un
amplificatore il cui ingresso è pilotato dalla stessa tensione sull’RTD.
44
Trasduttori - A.C. Neve
Dalla Fig. 49 si nota che al centro dell’intervallo –100
+800 °C la non linearità raggiunge il 3.7% mentre per
mezzo del feedback positivo può essere ridotta fino
all’11%.
Fig. 48 – Modello equivalente
Fig. 49 – Errore di non linearità
Fig. 50 – Linearizzatore analogico (Texas Inst)
Il circuito applicativo proposto in Fig. 50 utilizza un Pt100 a 2 fili.
La resistenza R1 definisce il valore iniziale della corrente di pilotaggio dell’RTD.
La resistenza R5 invece determina la variazione di corrente nell’RTD al variare della
temperatura attraverso l’uscita dell’amplificatore OPA188.
Le resistenze R2, R3, ed R4 stabiliscono il valore del guadagno e dell’offset per ottenere
il desiderato range della tensione di uscita.
Trasduttori – A.C. Neve
Continua.........
45