Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
FONDAMENTI DI INFORMATICA
Prof. Lorenzo Mezzalira
Appunti del corso di Fondamenti di informatica
Fascicolo integrativo - 2 -
Architettura e funzionalità del calcolatore
Architettura tipica dei calcolatori
Bus di sistema
Memoria di lavoro
Struttura interna di CPU
Istruzioni macchina e loro esecuzione
Linguaggio macchina ed esempi di programmi in Assembler
1 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Esecutore calcolatore: requisiti funzionali
Che cosa deve “saper fare” un calcolatore per eseguire i programmi?
Ricordiamo che un programma rappresenta un algoritmo, cioè descrive la sequenza di operazioni
da compiere per risolvere un problema.
Le operazioni sono rappresentate da istruzioni che sono codificate con opportune sequenze di bit
contenuti nelle parole della memoria di lavoro.
Quindi le funzioni da svolgere e le unità funzionali di un calcolatore sono:
mantenere e rendere accessibili istruzioni e dati, compito dellamemoria di lavoro
Prelevare da memoria di lavoro, capire ed eseguire le istruzioni, compito dell’unità centrale di
elaborazione, detta anche CPU - Central Processing Unit
interagire (scambiare informazioni) con il “mondo esterno” compito della CPU con l’esecuzione
di istruzioni e programmi che gestiscono le interfacce di ingresso/uscita, dette anche I/O –
Input/Output.
Architettura di Eckert - Mauchly - Von Neumann
L’architettura comunemente detta di Von Neumann può essere considerato un modello tipico
dell’architettura interna di un calcolatore.
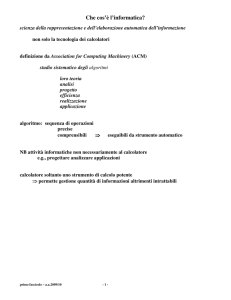
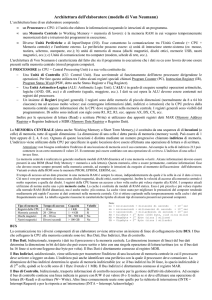
L’architettura che consideriamo è costituita da 3 blocchi funzionali collegati tra loro tramite un
BUS (insieme di collegamenti elettrici) che consente il trasferimento di informazioni tra i blocchi
funzionali stessi.
2 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Schema dell’architettura tipica di Calcolatore
MEMORIA DI LAVORO
UNITA’
CENTRALE DI
ELABORAZIONE
RAM
ROM
CPU
BUS
INDIRIZZI
BUS DATI
BUS
IN/OUT
BUS
CONTROLLO
INPUT
INPUT
OUTPUT
OUTPUT
INTERFACCE
VIDEO
UNITA’ DISCO
MOUSE
STAMPANTE
TASTIERA
UNITA’ PERIFERICHE
3 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
FUNZIONALITÀ GENERALE DEL CALCOLATORE
Esecuzione dei programmi
La funzionalità tipica dei calcolatori consiste nell’eseguire i programmi che sono descrizioni di
algoritmi. L’esecuzione dei programmi consiste nell’esecuzione sequenziale, secondo un flusso di
esecuzione, di istruzioni macchina. In base al tipo di istruzione da eseguire il calcolatore, passo
dopo passo, acquisirà informazioni dal mondo esterno, eseguirà operazioni sui dati memorizzati
internamente, effettuerà variazioni del flusso di esecuzione rispetto alla normale sequenza ed
emetterà delle informazioni verso il mondo esterno. Questa esecuzione avviene con elevata
velocità, così da mascherare talvolta la sequenzialità e dare l’impressione dello svolgimento di più
attività contemporaneamente.
per poter eseguire un programma è necessario che questo sia caricato (in formato eseguibile)
nella memoria di lavoro.
la CPU legge da memoria di lavoro, interpreta ed esegue le istruzioni del programma
operando sulle variabili (dati), anch’esse allocate nella memoria di lavoro.
La CPU può essere considerata l’unità attiva del calcolatore.
La CPU nell’esecuzione delle istruzioni procede normalmente secondo indirizzi sequenziali
crescenti nella memoria di lavoro, salvo quando esegue istruzioni di modifica del flusso di
controllo (istruzioni di salto o JUMP)
la CPU per leggere ed eseguire le istruzioni gestisce, controlla e temporizza il funzionamento
delle altre unità (memoria di lavoro e interfacce) tramite i segnali del bus.
le istruzioni devono essere espresse in codice macchina, cioè nel formato direttamente
interpretabile dalla CPU.
Ogni istruzione in codice macchina è quindi rappresentata da una sequenza di 0 e 1 che la
identifica in modo univoco.
le variabili devono essere accessibili alla CPU:
il riferimento ad una variabile è rappresentato da un indirizzo della memoria di lavoro.
Il valore della variabile è contenuto nella parola di memoria associata all’indirizzo ed è
rappresentato tramite una codifica binaria opportuna, dipendente dal tipo di variabile.
4 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Bus di sistema
Il BUS è il mezzo di comunicazione che consente il trasferimento delle informazioni dalla memoria
di lavoro e dalle interfacce di I/O alla CPU e viceversa.
E’ costituito da un numero adeguato di conduttori che “trasportano” ognuno il segnale elettrico
relativo ad un bit.
I bit possono essere
di selezione (indirizzi) per specificare il partner di ogni transazione
di informazione (istruzioni e dati) che rappresentano l’informazione di volta in volta trasferita
di controllo (comandi) che specificano modalità e temporizzazione delle transazioni.
Ogni trasferimento di informazione costituisce una transazione, normalmente basata su un singolo
ciclo di bus.
Per ogni transazione sul bus esiste una e una sola unità funzionale che gioca il ruolo di master (cioè
controllore, solitamente la CPU), mentre le altre unità sono nel ruolo di slave (elementi asserviti;
tipicamente la memoria di lavoro e le interfacce verso le periferiche e il mondo esterno).
I conduttori del bus collegano in parallelo i vari elementi che possono “generare” il segnale
corrispondente e/o “ricevere” tale segnale.
Per i segnali generabili da diversi dispositivi occorre un’appropriata gestione del pilotaggio
(significa: generazione del segnale) che eviti i possibili conflitti elettrici, che si verificherebbero
qualora diversi dispositivi tentassero contemporaneamente di imporre livelli alti e bassi su uno
stesso segnale.
Nota - Importanza della struttura a bus
Una struttura a bus è molto regolare e quindi si presta a sfruttare le interessanti caratteristiche della
modularità, se si realizzano le varie unità funzionali come moduli fisici inseribili nei connettori del bus:
Riconfigurabilità
Estendibilità
Facilità di manutenzione
Lungo ciclo di vita degli elementi costituenti l’architettura
Per godere di questi vantaggi un bus deve essere standardizzato, cioè corredato di specifiche chiare e
complete sulle caratteristiche fisiche, sul comportamento temporale e sul significato dei vari segnali.
Queste specifiche devono essere seguite dai costruttori dei moduli.
Sono stati proposti diversi bus di sistema per calcolatori, con diversi gradi di complessità e corrispondenti
diversi livelli di prestazioni e diverse finalità.
Poiché la modularità completa ottimizza la riconfigurabilità a scapito dell’economicità, spesso si adottano
soluzioni di compromesso nella struttura fisica dei calcolatori, con l’adozione di piastre madre
(motherboard) contenenti la porzione fissa dell’architettura del calcolatore e dotate di bus di espansione
per i moduli fisici aggiuntivi, per i quali è importante la possibilità di riconfigurazione ed estensione.
5 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Principali tipi di cicli di bus
I trasferimenti di informazioni sul bus hanno come protagoniste l’unità funzionale che in quel
momento gioca il ruolo di master e un’unità slave
Il master è in genere la CPU, ma occasionalmente può essere anche un controllore di DMA (Direct
Memory Access).
L’unità slave può essere una memoria o un’interfaccia di ingresso/uscita (I/O) o un’unità di
servizio, ad es. un timer.
La direzione del trasferimento tra master e slave determina la classificazione nelle due seguenti
categorie di operazioni.
Ciclo di lettura: l’elemento slave è la sorgente dell’informazione e il master ne è la destinazione.
Ciclo di scrittura: il master è la sorgente dell’informazione destinata all’elemento slave.
Una seconda classificazione distingue i cicli di bus riferiti alla memoria di lavoro o ad un’interfaccia.
Quindi i cicli di trasferimento sono classificabili nei seguenti tipi:
Lettura da memoria (memory read)
Scrittura in memoria (memory write)
Lettura da porta di ingresso (I/O read o IN)
Scrittura su porta d’uscita (I/O write o OUT)
Sono inoltre previsti particolari cicli di gestione dei meccanismi di Interruzione e di DMA,
sinteticamente presentati nel seguito.
Fasi di un ciclo di bus
Un ciclo di trasferimento si può generalmente scomporre nelle seguenti fasi.
Selezione del partner
Eventuale attesa (con unità lente)
Trasferimento dei dati
Conclusione (ritorno allo stato di riposo dei segnali)
Selezione
In questa fase il master seleziona l’elemento slave coinvolto dal trasferimento, precisando il tipo
di elemento (memoria o I/O) e la direzione (lettura o scrittura).
Eventuale attesa
Questa fase viene eseguita solo se l’elemento slave coinvolto è relativamente lento e quindi
richiede per il corretto trasferimento che venga concesso (con l’inserimento di stati di wait) un
tempo di accesso maggiore di quello dei normali cicli del bus.
Trasferimento dei dati
In questa fase l’informazione viene emessa dalla sorgente e l’unità destinazione del trasferimento
“cattura” (cioè memorizza localmente in un registro) tale informazione.
Conclusione
In questa fase tutti i segnali sono ordinatamente riportati nello stato di riposo.
6 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Tipi di circuiti di pilotaggio
Poichè la maggior parte dei segnali di un bus devono poter essere comandati (pilotati) da diversi
dispositivi, occorre prevedere diversi tipi di circuiti di pilotaggio dei segnali in uscita, adatti per i
vari casi e che consentono di evitare conflitti elettrici.
Invece i morsetti di ingresso dei segnali presentano normalmente un basso assorbimento (cioè alta
impedenza) e quindi il collegamento di più ingressi (fino ad un numero massimo specificato) ad
uno stesso segnale del bus non pone problemi.
+Vcc è la tensione di alimentazione dei circuiti integrati che generano i segnali logici (digitali).
GND = Ground = massa è il potenziale a zero Volt dell’alimentazione, che fa da riferimento di zero
per i segnali elettrici.
Cortocircuito dell’alimentazione è il fenomeno che si verifica quando venga a formarsi un percorso
a bassa impedenza tra +Vcc e GND.
In caso di cortocircuito si ha un conflitto elettrico che da luogo a correnti elevate (più del valore
nominale) rendendo non significativo il livello di tensione del segnale e danneggiando, anche
definitivamente, i circuiti che generano il segnale.
I tipi di circuiti di pilotaggio che consideriamo sono: totem-pole, tree-state e open-collector.
Totem-pole
Sono circuiti modellabili con un contatto a scambio, in grado di “forzare” (pilotare con bassa
impedenza) o un livello alto o un livello basso.
+Vcc
Conduttore
Del
BUS
U
Questi circuiti vanno usati solo per i segnali che sono sempre comandati
da uno stesso unico circuito.
Infatti se uno stesso segnale venisse comandato da più circuiti di tipo
totem-pole si verificherebbero conflitti elettrici nel caso di discordanza dei
valori logici generati dai vari circuiti.
GND
Tri-state
Sono circuiti modellabili con un contatto in grado di “forzare” (pilotare con bassa impedenza) o un
livello alto o un livello basso, in serie con un contatto che quando è aperto consente di “lasciare
libero” (alta impedenza – high-Z) il segnale.
+Vcc
R
U’
GND
U
OE
Conduttore
Del
BUS
Questi circuiti vanno usati per i segnali che possono essere
comandati da diversi circuiti durante intervalli di tempo diversi,
cioè in mutua esclusione.
Talvolta per questi segnali è previsto un resistore collegato
all’alimentazione (+Vcc), detto resistenza di pull-up, che porta al
livello alto il segnale nel caso che tutti i circuiti che lo pilotano
siano nello stato di alta impedenza.
7 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
I circuiti con uscita tri-state prevedono anche un ingresso di controllo, detto Output Enable (OE), che al
livello di riposo forza lo stato di alta impedenza, mentre al livello attivo impone in uscita il livello logico
(alto o basso) del circuito.
In molti circuiti integrati disponibili in commercio il comando di OE è attivo basso.
I circuiti di tipo tri-state, con i relativi comandi OE, si trovano tipicamente nei circuiti di memoria e delle
porte di I/O, per pilotare i morsetti che producono i dati da immettere nel bus dati.
Open-collector
Sono circuiti modellabili con un contatto chiuso a massa oppure aperto, in grado di “forzare”
(pilotare con bassa impedenza) solo un livello basso oppure di “lasciare libero” (alta impedenza –
high-Z) il segnale.
Per questi segnali è previsto in generale un resistore collegato all’alimentazione (+Vcc), detto
resistenza di pull-up, che porta al livello alto il segnale quando l’uscita è nello stato di alta
impedenza.
Il livello basso è quindi “dominante” su quello alto, nel senso che quando si hanno due circuiti che
pilotano una stessa linea del bus con pilotaggio open-collector, se uno propone un livello alto e
l’altro impone un livello basso prevale quest’ultimo e sulla linea del bus si avrà un segnale logico a
livello basso, senza conflitti elettrici.
+Vcc
R
U
Conduttore
Del
BUS
Questi circuiti vanno usati per i segnali che possono essere
comandati da diversi circuiti, anche contemporaneamente.
GND
Tra i circuiti open-collector collegati ad uno stesso conduttore si realizza una funzione logica
“cablata”:
Iin logica positiva si ottiene la funzione Wired-AND rispetto al livello dominato, che è quello alto.
Infatti per avere segnale alto in uscita occorre che tutti i circuiti propongano un livello alto.
In logica negativa si ottiene la funzione Wired-OR rispetto al livello dominante, che è quello basso
Infatti per avere un segnale basso in uscita basta che almeno uno dei circuiti proponga un livello
basso.
Spesso si opera in logica negativa per effettuare la funzione OR tra più richieste concomitanti, come ad es.
per i segnali di richiesta di interruzione alla CPU provenienti da diversi richiedenti, anche
contemporaneamente.
8 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Le parti di un bus di sistema
L’insieme dei conduttori dei bus di sistema può essere scomposto in diversi sottoinsiemi ognuno
dedicato a specifiche funzionalità.
Bus Dati
I segnali sono destinati a rappresentare la codifica binaria delle informazioni (istruzioni o dati) da
trasferire da una unità all’altra, e sono comandati dal dispositivo sorgente.
Il contenuto può essere fornito dalla memoria o da una porta di ingresso (ciclo di lettura), oppure
dalla CPU (ciclo di scrittura).
I conduttori sono 8, 16, 32 a seconda della “lunghezza di parola” del sistema.
Al termine del trasferimento, in caso di lettura, il contenuto del bus dati è memorizzato in un
registro d’appoggio della CPU (registro dati). In caso di scrittura, la CPU utilizza il registro dati per
presentare la configurazione sul bus, che verrà inserita nella parola di memoria o nella porta di
uscita indirizzata.
Bus Indirizzi
I segnali sono usati dal dispositivo master per rappresentare con codifica binaria pesata l’indirizzo
che identifica
il modulo slave e il suo registro interno (o la cella di memoria) interessato dal trasferimento.
Si hanno bus con 10, 16, 20, 24, 32 bit di indirizzo, a seconda dell’estensione dell’area di
indirizzamento prevista. Con k bit (conduttori) di indirizzo, le parole di memoria indirizzabili sono
2k
L’indirizzo è in genere fornito dalla CPU che utilizza un suo registro interno d’appoggio (registro
indirizzi) per presentare la configurazione sul bus.. In genere k = 12 . . 32.
Bus di Controllo
I segnali hanno lo scopo di qualificare il tipo di trasferimento (lettura o scrittura, memoria o I/O) e
di temporizzare la validità di indirizzi e dati e sono per lo più gestiti dal dispositivo master, ad
eccezione dei segnali di richiesta (wait, interrupt, DMA) che sono gestiti dalle unità slave
richiedenti.
La CPU gestisce i segnali del bus di controllo mediante la sua unità di controllo.
I segnali del bus di controllo possono essere anche molto diversi tra i vari tipi di bus adottati per i
diversi calcolatori, anche se le operazioni di trasferimento sono concettualmente le stesse.
Bus Servizi
Sono segnali ausiliari come, ad esempio, di Reset e Clock di sistema.
Bus Alimentazioni
Non si tratta di segnali ma di conduttori per la massa e le varie tensioni di alimentazione usate dai
moduli del sistema. Spesso +5V, +12V, -5V e GND
9 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Un esempio di semplice bus – Il bus MMS-8
Progettato a metà anni ’70 per i microprocessori a 8 bit con i seguenti obiettivi:
semplice ed economico, ma adatto per i tipici processori a 8 bit
chiaro significato dei segnali per una standardizzazione
adatto anche per scopi didattici concettuali e/o applicativi sperimentali
Bus Dati
Prevede i segnali DB7 .. DB0 – comandati da circuiti tri-state – 8 bit
Bus Indirizzi
Prevede i segnali AB15 .. AB0 – comandati da circuiti tri-state – 16 bit
Con 16 bit lo spazio di indirizzamento è di 64k (216 )
Bus di controllo – MMS8
ADMEM (ADdress for MEMory) – Tri-state – Attivo basso indica che l’indirizzo presente sui bit di indirizzo
è indirizzo valido per accessi a memoria. Rimane attivo basso per tutto il ciclo di accesso alla memoria e poi
torna a riposo a livello alto.
ADPER (ADdress for PERipheral) – Tri-state – Attivo basso indica che l’indirizzo presente sui bit di indirizzo
è indirizzo valido per accessi a periferica. Rimane attivo basso per tutto il ciclo di accesso alla periferica e
poi torna a riposo a livello alto
WRITE – Tri-state – Rimane attivo a livello basso per tutta la durata di un ciclo di scrittura scrittura, mentre
rimane a riposo a livello alto e nei cicli di lettura
DATEN (DAta Transfer ENable) – Tri-state – Attivo a livello basso indica l’intervallo di tempo destinato al
trasferimento dei dati.
NOTYET – Open-collector – Attivo basso comandato dai moduli slave che richiedono un prolungamento del
ciclo di bus, con inserzione di stati di attesa (wait). Se la transazione avviene indirizzando un elemento
veloce, che non richiede stati di wait, questo segnale rimane a riposo a livello alto.
INTREQ (INTerrupt REQuest) – Open-collector – Attivo basso comandato dai moduli che vogliono inoltrare
alla CPU una richiesta di interruzione
INTACK (INTerrupt ACKnowledge) – Totem-pole – Attivo basso comandato dalla CPU quando accetta una
richiesta di interruzione
HOLDREQ (HOLD REQuest) – Open-collector – Attivo basso comandato dai moduli DMA Controller, che
vogliono inoltrare alla CPU la richiesta di gestire trasferimenti con DMA con la CPU che si sospende dal
ruolo di master.
HOLDACK (HOLD ACKnowledge) – Totem-pole – Attivo basso comandato dalla CPU quando ha “rilasciato”
(cioè posto in condizione tri-state) il controllo del bus accettando una richiesta da un controllore di DMA
Bus servizi
- MMS8
RESET
CLOCK
Bus alimentazioni – MMS8
+5V
+12V
-5V
GND – Riferimento comune di massa a 0V
10 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Forme d’onda di segnali di bus
Con il termine “forma d’onda” di segnali digitali si intende la descrizione grafica
schematizzata dell’andamento temporale di tali segnali.
La descrizione è su un piano cartesiano con l’asse delle ascisse che rappresenta il tempo e l’asse
delle ordinate rappresenta i livelli dei segnali.
La scala dei tempi è spesso molto dilatata (i centimetri possono corrispondere a poche decine di
nanosecondi) e le commutazioni dei segnali sono rappresentate con segmenti non perfettamente
verticali, ma con una leggera inclinazione, per evidenziare che le commutazioni non sono
istantanee ma che richiedono un certo tempo (in genere pochi ns).
Per i segnali aggregati a rappresentare un’unica informazione (come quelli degli indirizzi o quelli
dei dati) si indicano contemporaneamente i livelli alto e basso, per rappresentare il fatto che
alcuni di essi possono assumere un livello e altri l’altro livello. I momenti di commutazione sono
rappresentati con uno o più incroci ad X.
Nelle forme d’onda dei segnali digitali sono rappresentate in modo significativo le correlazioni
temporali tra le commutazioni e gli intervalli di stabilità dei vari segnali. Sono invece rappresentati
in modo schematico e semplificato i livelli dei segnali.
Per i segnali analogici, invece, anche il livello del segnale è rappresentato con accuratezza
nell’andamento temporale del suo valore.
11 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Esempi di forme d’onda di cicli di bus MMS-8
Scrittura in Memoria – Sorgente CPU
Indirizzo impostato dal master
AB0..AB15
Indirizzo valido per accesso a memoria
ADMEM
ADPER
Operazione di scrittura
WRITE
Dati da master
DB0..DB7
DATEN
Dati validi
NOTYET
Eventuale richiesta di wait
T
Accesso a memoria
MEMORIA
PAROLA 0
Deco
difica
tore
PAROLA 1
PAROLA 2
CPU
R. dati
Unità
di
controllo
PAROLA 3
R. indirizzi
WM
RM
BUS INDIRIZZI
BUS DATI
BUS CONTROLLO
WM è il segnale Write Memory = scrittura memoria WM = !ADMEM and !WRITE and !DATEN
RM è il segnale Read Memory = lettura memoria
RM = !ADMEM and WRITE and !DATEN
12 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Lettura da periferica – Destinazione CPU
Indirizzo impostato dal master
AB0..AB15
ADMEM
Indirizzo valido per accesso a periferica
ADPER
Operazione di lettura
WRITE
DB0..DB7
Dati da periferica
DATEN
Dati validi
NOTYET
Eventuale richiesta di wait
T
Caricamento
da bus dati
a registro dati
della CPU
Accesso a unità periferica
CPU
R. dati
Unità
di
controllo
R. indirizzi
BUS INDIRIZZI
BUS DATI
BUS CONTROLLO
WO
Deco
difica
tore
PORTA OUT
(RDP)
RI
PORTA IN
(RDP)
PERIFERICA
DI USCITA
PERIFERICA
DI INGRESSO
WO è il segnale Write Output = scrittura su porta WO = !ADPER and !WRITE and !DATEN
RI è il segnale Read Input = lettura da porta
RI = !ADPER and WRITE and !DATEN
13 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Esempio di banco di memoria di 4 Kbyte interfacciato sul bus
VCC
AB15
AB14
AB13
AB12
Comparatore
Selezione indirizzo di un modulo
1 = APERTO
=
AB11
A11
AB0
A0
---
Chip di Memoria da 4K Byte
CS
ADMEM
WRITE
WR
OE
D7 - - - - - D0
DATEN
OE
Timer
OE
NOTYET
DB7
DB0
A15 . . A0 bit di indirizzamento
I 4 bit più significativi (A15 .. A12) sono usati in questo esempio per selezionare un banco di 4K. Un banco di
memoria viene attivato solo se la configurazione di questi bit corrisponde all’indirizzo del banco, così come
è impostato tramite i 4 interruttori (microswitch).
I 12 bit meno significativi dell’indirizzo (AB11 .. AB0) selezionano la cella di memoria voluta all’interno del
banco di 4K
CS – Chip Select attivo basso abilita la memoria
E’ tipico dei circuiti di memoria essere dotati di un bit di comando, il Chip Select, che deve essere
attivato (basso) quando si devono eseguire operazioni con quella memoria. Con il bit CS a livello alto la
memoria rimane inattiva qualunque siano i valori degli altri bit di comando e di indirizzamento.
WR – Write attivo basso comanda la scrittura (memorizzazione)
A livello alto viene comandata la lettura
OE – Output Enable attivo basso attiva le uscite dei bit
A livello alto le uscite sono ad alta impedenza. I segnali di comando Output Enable si trovano in
genere nei circuiti di memoria e nei registri dotati di uscite con circuito di pilotaggio tri-state.
D7 . . D0 bit dei dati
14 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Memoria di lavoro
La memoria di lavoro è un insieme ordinato di parole (o celle) che possono contenere
(memorizzare) informazioni, e cioè le istruzioni e i dati
La memoria di lavoro può essere pensata come una tabella monodimensionale , nella quale gli
elementi sono le parole di memoria.
Ogni parola di memoria è costituita da h elementi di memoria binari (ad es. h = 8, 16, 32, 64 bit).
Una parola di memoria è come un registro. Tutte le parole di una memoria hanno lo stesso
numero di bit.
Esempio di parola da 16 bit:
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
0
1
1
1
0
0
1
1
1
0
0
0
1
1
0
1
La posizione di ogni parola nella memoria è identificata in modo univoco da un numero intero
positivo, detto indirizzo della parola di memoria, codificato in binario pesato senza segno
Per accedere ad una generica parola di memoria è necessario fornire all’unità di memoria
l’indirizzo di tale parola (che la identifica in modo univoco) e attivare il comando di lettura o
quello di scrittura.
lettura – estrae una copia del contenuto della cella che rimane immutato
scrittura – inserisce nella cella un valore che sostituisce il precedente
La memoria di lavoro è l’unica memoria direttamente accessibile dalla CPU per leggere o scrivere
singole informazioni.
se k è il numero di bit disponibili per specificare l’indirizzo, allora 2k è l’area di memoria fisica
indirizzabile.
Ad esempio, con 23 bit di indirizzo lo spazio di indirizzamento è di 8Mega parole.
Naturalmente la parte di memoria effettivamente presente avrà un numero di celle minore o
uguale allo spazio indirizzabile. Gli indirizzi corrispondenti ad aree prive di memoria non
producono alcuna funzionalità.
15 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
La memoria di lavoro è detta ad accesso casuale, perché il meccanismo di indirizzamento di cui è dotata
consente di accedere direttamente e con gli stessi tempi ad una qualsiasi parola, senza obbligare a
procedere per indirizzi sequenziali.
Si noti che la proprietà di essere ad accesso casuale, in tutta l’area di indirizzamento, è una caratteristica
fondamentale per consentire una elevata velocità di esecuzione dei programmi, che nel loro svolgimento
comportano accessi a diverse informazioni (istruzioni e dati) collocati in posizioni non sequenziali.
La memoria di lavoro è, in generale, composta da due tipi di memorie: la memoria RAM (Random Access
Memory) la memoria ROM (Read Only Memory).
Le parole di memoria RAM sono modificabili, cioè leggibili e scrivibili. La memoria RAM è in genere volatile.
La memoria ROM è solo leggibile: le informazioni vengono scritte in modo “permanente” di solito dal
costruttore, prima dell’installazione nel calcolatore. Anche la memoria ROM è ad accesso casuale.
Caratteristiche tecnologiche delle memorie di lavoro:
sono realizzate con circuiti integrati a semiconduttori (transistori)
la memoria RAM con le attuali tecnologie elettroniche è volatile e quindi mantiene le informazioni
solo quando è alimentata. Ma la volatilità NON è una caratteristica necessaria.
all’accensione il contenuto delle parole di memoria RAM è non significativo, cioè non ha alcuna
correlazione col contenuto che aveva al momento dello spegnimento
nella memoria ROM le informazioni sono permanentemente scritte e non modificabili (quindi non
volatili)
i tempi di accesso alla singola parola di memoria sono dell’ordine delle decine o centinaia di
nanosecondi
la memoria di lavoro è una memoria ad accesso veloce rispetto alla memoria di massa (che ha
tempi di accesso dell’ordine delle decine di millisecondi e quindi per un accesso singolo è circa 1
milione di volte più lenta) ma ha in genere un numero di parole inferiore a quello della memoria di
massa.
16 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
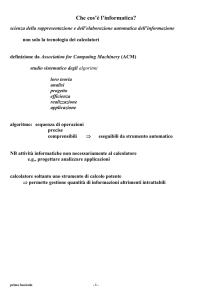
Schema funzionale della memoria di lavoro (RAM)
Evidenziato il caso di lettura della parola di indirizzo 577
Indirizzo =
0010 0100 0001
D
e
c
o
d
i
f
i
c
a
0
0
0
0
1
0
READ = 1
WRITE = 0
1
0
0
1
1
0
0
1
0
0
0
1
0
0
1
1
0
1
0
0
0
0
1
1
0
1
2
1
0
1
1
1
1
1
1
3
0
0
1
0
1
1
0
1
577
0
0
0
0
1
0
0
0
4095
Registro lettura / scrittura
BUS
indirizzi
BUS Dati
BUS Controllo
0
OUT = 0
0
1
0
1
1
0
1
INPUT = 0
Nell’esempio sopra riportatosi ha:
BUS Indirizzi di 12 bit (da 0 a 4095)
I circuiti di decodifica ricevono in ingresso i 12 bit di indirizzo ed emettono in uscita i 4096 bit di attivazione
delle singole celle. Naturalmente dei bit di uscita sarà attivato uno soltanto, cioè quello che corrisponde
all’indirizzo rappresentato dai bit di indirizzamento.
BUS Dati e parole di memoria di 8 bit
Nello schema di esempio è evidenziato il caso di lettura da memoria
all’indirizzo 577 che in binario su 12 bit è 0010 0100 0001 (HEX 0241h)
il cui contenuto letto è 0010 1101 (HEX 02Dh)
17 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Una possibile partizione della memoria di lavoro
0000
INDIRIZZI
RAM
Area per dati di sistema
RAM
Area codice
R
A
M
RAM
Area dati
Area di
lavoro per i
programmi
applicativi
Area indirizzabile
RAM
Area codice e dati
di Sistema
R
O
M
ROM
Area di
lavoro del
Sistema
Operativo
Area codice e tabelle
Sistema Operativo
Area indirizzabile
libera per
eventuali espansioni
di memoria
2K - 1
18 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
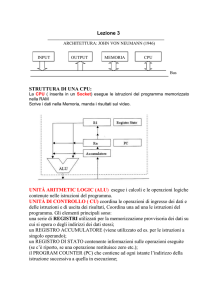
Struttura della CPU
Per presentare la funzionalità tipica dei calcolatori programmabili, ed in particolare dell’unità
centrale (CPU = Central Processing Unit) ricorriamo ad un esempio estremamente semplificato e
ridotto agli aspetti fondamentali. Un semplificato esempio didattico si rende necessario perchè le
CPU degli attuali calcolatori, anche dei più semplici microcontrollori, hanno complessità non
compatibili con un insegnamento di Fondamenti di informatica. I meccanismi di base della
funzionalità sono però gli stessi e quindi ben esemplificati.
Consideriamo le caratteristiche di un programma in codice macchina che derivano
dall’architettura tipica dei calcolatori, e in particolare dalla struttura della CPU presentata nelle
pagine seguenti.
Relativamente alle istruzioni: consideriamo il caso semplice in cui ogni istruzione in linguaggio
macchina occupa una sola parola di memoria.
le istruzioni di un programma da eseguire sono caricate in parole di memoria di lavoro contigue.
L’indirizzo della parola di memoria che contiene la prima istruzione (del sistema operativo) da
eseguire all’accensione è “noto” (cablato) alla CPU. Questo significa che le CPU sono realizzate in
modo che all’accensione, o dopo ogni reset, iniziano a leggere la prima istruzione da eseguire
generando sempre un certo indirizzo che è tipico di ogni modello di CPU. Naturalmente nel
progettare un sistema di calcolo si dovrà fare in modo che a tale indirizzo sia collocata la prima
istruzione da eseguire. Questa sarà l’inizio del Sistema Operativo (S.O.), eventualmente molto
semplice se si tratta di microcontrollori embedded, cioè inglobati in un dispositivo.
L’inizio dei programmi applicativi è noto al Sistema Operativo. Nei sistemi che devono eseguire
applicazioni scelte da un operatore (come per i Personal Computer) il S.O. acquisisce questo
indirizzo da comandi dell’operatore, mentre nelle applicazioni autonome questo indirizzo è
ricavato automaticamente.
Relativamente alle variabili: Consideriamo il caso semplice in cui ogni variabile occupa una sola
parola di memoria.
Nel caricamento del programma da eseguire vengono riservate le parole di memoria di lavoro
adeguate a contenere i valori delle variabili (dati).
lo spazio di memoria riservato per le variabili è “distinto” da quello che contiene le istruzioni.
In linguaggio macchina le variabili sono identificate in modo univoco dall’indirizzo della parola di
memoria corrispondente.
Il nome simbolico di una variabile (che appare nel programma sorgente) è ad uso umano, e può
essere considerato rappresentativo dell’indirizzo (che appare nel programma eseguibile) della
parola di memoria riservata ad essa.
Il contenuto della parola di memoria riservata ad una variabile è costituito dalla configurazione dei
bit che rappresenta la codifica del valore della variabile.
Il valore delle variabili sarà determinato ed utilizzato dall’esecuzione del programma (con
operazioni di lettura e assegnamento).
Poichè l’esecuzione è sequenziale, la CPU preleva da memoria di lavoro un’istruzione alla volta. A
tal fine nella CPU è presente un registro contatore di programma PC (Program Counter) che viene
man mano incrementato in modo da contenere l’indirizzo della parola di memoria in cui è
presente la prossima istruzione da eseguire.
19 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
L’istruzione da eseguire, una volta prelevata dalla memoria con un’operazione di lettura, viene
memorizzata all’interno della CPU nel registro istruzione RI e decodificata (interpretata) dall’unità
di controllo.
L’esecuzione di un’istruzione comporta l’esecuzione di un insieme di “micro passi” elementari.
Questi possono comportare la generazione di segnali del bus di controllo per l’accesso a memoria
o a porta di I/O, e la generazione di segnali di controllo interni alla CPU per l’esecuzione di
operazioni aritmetiche o logiche e per il trasferimento interno e caricamento di dati nei registri.
20 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
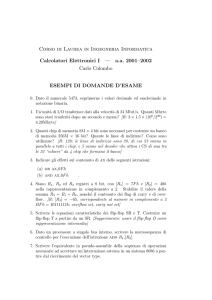
Struttura della CPU
OPERANDO 1
OPERANDO 2
CPU
UNITA’
LOGICA - ARITMETICA
ALU
REGISTRO
DI STATO
ACCUMULATORE
E REGISTRI
DI LAVORO
STACK POINTER
PROGRAM
COUNTER
c.op. operando
REG. ISTRUZIONE
REGISTRO
DATI
BUS DATI
UNITA’
DI CONTROLLO
BUS CONTROLLO
REGISTRO
INDIRIZZI
BUS INDIRIZZI
Le frecce indicano i possibili trasferimenti di informazioni
La freccia tratteggiata indica i segnali di controllo per l’ALU, mentre sono sottintesi i comandi dell’unità di
controllo che abilitano i trasferimenti di informazioni tra i registri interni della CPU.
Si noti che nello schema a blocchi dell’interno della CPU sono sottintesi i bit di comando di cui sono dotati
tutti i registri, e speficamente:
OE – Output Enable – bit che comanda l’emissione del contenuto del registro tramite i circuiti di uscita tristate
LD – Load – bit che comanda il caricamento del registro con il valore che si presenta ai suoi ingressi.
Questi bit di comando sono attivati dall’unità di controllo con le sequenze e temporizzazioni necessarie per
l’esecuzione delle istruzioni macchina.
21 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Componenti della CPU
Registro indirizzi: registro di appoggio tra la CPU e il bus indirizzi.
La codifica binaria dell’indirizzo di memoria o della porta di I/O cui si accede viene caricata dalla
CPU in questo registro. La sua dimensione (in numero di bit) è pari a quella del bus indirizzi.
Registro dati: registro bidirezionale di appoggio tra la CPU e il bus dati.
In lettura da memoria o da porta di ingresso, il contenuto del bus dati viene memorizzato in
questo registro, prima di essere trasferito internamente in un qualsiasi altro elemento della CPU.
In scrittura, la codifica binaria da presentare sul bus dati viene caricata dalla CPU in questo registro
che si affaccia sul bus dati tramite circuiti tri-state.
La dimensione di questo registro è pari a quella del bus dati. (in genere 8, 16 o 32 bit)
Unità di controllo: genera la sequenza di (micro)passi elementari necessari all’esecuzione di ogni
specifica istruzione macchina.
L’unità di controllo costituisce l’unità attiva che imprime l’evoluzione del funzionamento della CPU
e dell’intero calcolatore. Svolge questa funzione generando i segnali di controllo che comandano i
vari elementi interni della CPU e i segnali di controllo del bus.
Ogni passo elementare per l’esecuzione delle istruzioni è composto da una serie di comandi
elementari che possono essere esterni (segnali sul bus di controllo) o interni (segnali per l’ALU e
per i trasferimenti tra registri).
I comandi consistono nell’attivazione di appositi bit. Il livello attivo dei comandi può essere il livello
alto o, più spesso, il livello basso.
Ad es. la ricopiatura del contenuto di un registro in un altro registro è ottenuta attivando il
comando Output Enable (OE) del primo registro e il comando Load (LD) del secondo registro.
La sequenza di passi elementari che viene attivata ciclicamente dall’unità di controllo può essere
schematizzata in tre fasi distinte:
fase di fetch:
Il registro Program Counter viene usato per fornire l’indirizzo di lettura che viene copiato nel
registro indirizzi e quindi presentato nel bus indirizzi.
L’acquisizione dalla memoria di lavoro dell’istruzione da eseguire è ottenuta presentando sui bit
del bus di controllo i segnali che comandano la lettura da memoria.
Il Program Counter viene incrementato, in modo che il suo contenuto sia l’indirizzo dell’istruzione
seguente.
L’informazione letta dalla memoria è l’istruzione che proviene dal bus dati, passa nel registro dati
e infine viene caricata nel registro istruzione.
fase di decodifica:
in questa fase avviene “l’interpretazione” del codice operativo dell’istruzione contenuta nel
registro istruzione
fase di esecuzione:
Questa fase si svolge in modo diverso per le diverse istruzioni macchina. A seconda del codice
operativo, l’unità di controllo attiva la successione di passi elementari che effettuano le operazioni
pertinenti all’istruzione in esecuzione
Il ritmo temporale dei vari passi è imposto dal segnale di clock che è attivato da un oscillatore che
impone un andamento periodico.
22 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Tensione
del segnale
CLOCK
5V
Tempo
0V
istanti di attivazioni dei passi elementari
Registro contatore di programma (Program Counter - PC): registro che contiene l’indirizzo della
prossima istruzione da eseguire.
E’ collegato al registro indirizzi per la lettura da memoria di lavoro (fase di fetch) dell’istruzione da
eseguire. E’ dotato di un comando di incremento che viene attivato dopo ogni lettura di istruzione
(fetch), ma può anche ricevere e caricare valori da altri registri della CPU.
La sua dimensione è pari a quella del bus indirizzi.
Il flusso di esecuzione di un programma in esecuzione è “scandito” dai valori assunti dal
registro program counter PC.
In caso di normale esecuzione in sequenza, il registro PC viene ogni volta incrementato di 1.
In caso di esecuzione di istruzioni di salto, nel registro PC viene “forzato” (scritto) l’indirizzo
dell’istruzione destinazione del salto, che sarà quindi quella prelevata nella prossima fase di fetch.
Registro puntatore alla pila (Stack Pointer): è un importante registro usato per contenere e
gestire l’indirizzo corrente nell’ambito di una porzione della memoria di lavoro, chiamata stack
(pila).
L’uso delle parole di memoria di quest’area è gestito secondo la modalità LIFO (Last In First Out) e
cioè l’ultima informazione che viene scritta è la prima disponibile per la lettura. E’ come se le
informazioni fossero collocate una sopra l’altra, in una pila appunto, in cui è accessibile solo
l’informazione in cima alla pila.
Lo stack pointer contiene l’indirizzo della prima parola di memoria leggibile nello stack.
L’inserimento (push) di una informazione nello stack comporta:
incremento dello Stack Pointer
scrittura dell’informazione all’indirizzo di memoria contenuto nello Stack Pointer
L’estrazione (pop) di una informazione dallo stack comporta:
lettura dell’informazione indirizzata dallo Stack Pointer
decremento dello Stack Pointer
La possibilità di gestire un’area di memoria a stack, cioè con modalità LIFO, è di importanza
fondamentale per la chiamata di sottoprogrammi e per il ritorno al programma chiamante.
La chiamata di un sottoprogramma comporta infatti di
1. salvare il valore del Program Counter in cima alla pila (push). Il valore del PC è l’indirizzo
dell’istruzione successiva a quella di chiamata, e quindi è l’istruzione da eseguire al termine
dell’esecuzione del sottoprogramma (sarà usato come indirizzo di ritorno)
2. forzare nel Program Counter l’indirizzo della prima istruzione del sottoprogramma da
eseguire
23 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Il ritorno da sottoprogramma comporta invece di
1. estrarre dalla cima della pila (pop) e forzare nel Program Counter l’indirizzo di ritorno
salvato nella pila al momento della chiamata
Registro Istruzione: contiene l’istruzione (in linguaggio macchina) correntemente in esecuzione. Il
contenuto del Registro Istruzione viene caricato tramite il bus dati ad ogni lettura (fetch), dalla
memoria di lavoro, di una nuova istruzione da eseguire.
In linguaggio macchina, nel nostro esempio semplificato, il formato di un’istruzione è costituito da
2 campi:
campo codice operativo: una sequenza di bit che identifica univocamente il tipo di
istruzione (codifica enumerativa)
campo operando: una sequenza di bit che contiene il riferimento all’eventuale operando
su cui l’istruzione agisce.
L’operando di una istruzione può essere un dato, e allora il riferimento è (generalmente) l’indirizzo
della parola di memoria riservata per il dato.
L’operando di una istruzione può essere anche un’altra istruzione (la prossima da eseguire con un
salto “jump”), e allora il riferimento è l’indirizzo della parola di memoria che contiene quest’altra
istruzione (alla quale saltare).
Il campo codice operativo del registro istruzione è presentato in ingresso all’unità di controllo che,
in base alla configurazione dei bit di tale campo, interpreta ed esegue l’istruzione corrente,
generando con opportune temporizzazioni i necessari segnali di controllo interni ed esterni alla
CPU.
Il campo operando (che è in generale un indirizzo) è collegato sia al registro indirizzi che al registro
PC.
La dimensione del registro istruzione è (nel nostro esempio) quella del bus dati.
24 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Registri di lavoro: sono dei registri di supporto alle operazioni da eseguire all’interno della CPU.
La loro dimensione è generalmente quella del bus dati, ma può essere anche maggiore. In vari tipi
di CPU troviamo registri di 8, 16 o 32 bit. Anche il numero di tali registri dipende dal tipo di CPU. I
registri di lavoro sono identificati (in linguaggio Assembler) ognuno da un suo nome simbolico e
referenziabili con codifica binaria enumerativa (in linguaggio macchina) direttamente dalle
istruzioni in linguaggio macchina (o ASSEMBLER).
Accumulatore (A): è il principale (e nel nostro esempio l’unico) tra i registri di lavoro e, per
convenzione, è quello in cui viene memorizzato il risultato di ogni operazione eseguita dall’unità
aritmetico-logica.
Unità aritmetico-logica (ALU): esegue le operazioni aritmetiche e logiche elementari.
Le operazioni eseguibili dipendono dalla complessità dell’ALU. Le operazioni fondamentali sono
somma, sottrazione, AND, OR, NOT alle quali possono ricondursi operazioni più complesse quali,
moltiplicazione, divisione, confronto, ecc..
L’unità aritmetico logica è a 2 operandi in ingresso e fornisce 1 risultato in uscita. I valori degli
operandi sono presentati all’ALU tramite i registri di appoggio e il risultato viene memorizzato
generalmente nell’accumulatore. I diversi tipi di operazioni vengono abilitati dall’unità di controllo
tramite opportuni segnali.
Sono previsti inoltre:
Registri di appoggio (non referenziabili dalle istruzioni in linguaggio macchina o ASSEMBLER):
per l’unità aritmetico logica (operando1 e operando2): necessari per presentare all’ALU gli
operandi su cui eseguire l’operazione.
Circuiti per il calcolo degli indirizzi: necessario per consentire il calcolo dell’indirizzo dell’operando
in presenza delle diverse modalità di indirizzamento.
Registro di stato: è un registro che raggruppa dei bit che hanno significato singolarmente per
rappresentare delle condizioni.
Ogni bit riporta indicazioni relative all’esito dell’operazione aritmetica o logica eseguita dall’ALU
(viene quindi “scritto” dall’ALU al termine di ogni operazione eseguita). I bit di stato (flag) più
significativi sono:
Carry:
viene posto a 1 quando l’operazione aritmetica di somma (o sottrazione) tra due operandi genera
riporto (o prestito)
Zero:
viene posto a 1 quando il risultato dell’operazione eseguita dall’ALU vale zero (e quindi il
contenuto dell’accumulatore è tutti zeri)
Segno:
viene posto a 1 quando il risultato dell’operazione eseguita dall’ALU è negativo (il bit più
significativo del risultato è 1)
Overflow:
viene posto a 1 quando, dopo una somma o sottrazione tra interi in complemento a 2, il risultato
è di segno discorde rispetto a quello concorde tra loro degli operandi (operandi di segno discorde
25 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
non possono dare overflow). Questo indica che il valore numerico ottenuto non è rappresentabile
con il numero di bit a disposizione.
I bit del registro di stato vengono interpretati dall’unità di controllo nell’esecuzione di istruzioni di
salto condizionato come verrà descritto nel seguito
Linguaggio macchina
Ogni tipo di CPU ha un suo proprio linguaggio macchina che comprende un insieme di istruzioni
(set di istruzioni) codificate in forma binaria e direttamente interpretabili ed eseguibili dalla CPU
stessa. Ogni programma, per poter essere eseguito da una CPU deve quindi essere disponibile
(eventualmente tradotto) nel linguaggio macchina specifico del tipo di CPU.
Ogni istruzione in linguaggio macchina è rappresentata da bit e quindi è costituita da una
sequenza di “0” e “1”. Ogni istruzione è costituita logicamente da due campi:
il campo codice operativo è costituito dalla configurazione binaria che identifica univocamente il
tipo di istruzione
il campo operando contiene la configurazione binaria che consente di identificare il dato su cui
opera l’istruzione, e generalmente rappresenta un indirizzo di memoria di lavoro in cui è
contenuto il valore da utilizzare.
Classi di istruzioni tipiche in linguaggio macchina:
istruzioni di trasferimento dati da e in memoria. Usate per leggere il valore di variabili o per
assegnare loro un nuovo valore
istruzioni di trasferimento dati da e in periferica. Usate per acquisire informazioni dal
mondo esterno tramite porte di ingresso o per emettere informazioni tramite porte
d’uscita.
istruzioni aritmetico-logiche. Eseguono il calcolo di operazioni aritmetiche o logiche tra i
valori predisposti come operandi.
istruzioni di modifica del flusso di esecuzione. Sono i salti (jump) a istruzioni non
sequenziali e chiamate (call) di attivazione di sottoprogrammi.
istruzioni ausiliarie
Consideriamo un set di istruzioni molto semplificato e congruente con la struttura della CPU, della
memoria e delle interfacce di I/O considerata fino ad ora.
In particolare sono drasticamente semplificate le operazioni di ingresso e uscita che, con esempi
più realistici, con la loro macchinosità renderebbero molto meno comprensibili gli aspetti di base
che qui si vogliono presentare.
Per motivi di chiarezza, rappresenteremo il codice operativo di ogni istruzione anche con una sigla
mnemonica (linguaggio simbolico ASSEMBLER).
Nell’esempio considereremo istruzioni di 16 bit in cui il codice operativo è di 4 bit e il campo
operando è di 12 bit.
Si noti che questa scelta consente di codificare 24 = 16 diverse istruzioni ed un campo di
indirizzamento nella memoria di lavoro di 212 = 4096 parole per istruzioni e dati.
26 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
cod. operativo
operando
0000 (LDA)
0001 (STA)
0010 (ADD)
0011 (SUB)
0100 (JMP)
indirizzo operando
indirizzo operando
indirizzo operando
indirizzo operando
indirizzo istruzione
0101 (JZ)
indirizzo istruzione
0110 (IN)
0111 (OUT)
1000 (CALL)
indirizzo porta
indirizzo porta
indirizzo istruzione
Significato (semantica)
mem(indirizzo) ACC
lettura
ACC mem(indirizzo)
scrittura
ACC + mem(indirizzo) ACC somma
ACC - mem(indirizzo) ACC sottrazione
istruzione di salto incondizionato indirizzo
PC (salta a indirizzo)
istruzione di salto condizionato
se bit di stato zero =1
indirizzo PC
porta (indirizzo) ACC
ACC porta(indirizzo)
chiamata a sottoprogramma
PC stack(Stack Pointer)
push
indirizzo PC
ritorno da sottoprogramma
stack(Stack Pointer) PC
pop
mem(indirizzo) IX
istruzioni di salto condizionato
dove cond è uno dei bit di stato
(C=carry, S=segno, O=overflow)
se bit di stato cond =1
indirizzo PC
mem(reg.indice) ACC
ACC mem(reg.indice)
1001 (RET)
1010 (LDI)
(Jcond)
1011 (JC)
1100 (JS)
1101 (JO)
indirizzo
indirizzo
indirizzo
indirizzo
indirizzo
operando
istruzione
istruzione
istruzione
istruzione
1110 (LDAI)
1111 (STAI)
mem(indirizzo):
porta (indirizzo):
stack(Stack Pointer):
ACC:
IX:
parola di memoria specificata (indirizzata) da indirizzo
porta specificata (indirizzata) da indirizzo
parola di memoria dello stack indirizzata dallo Stack Pointer
Accumulatore
Registro Indice
27 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Prodotto per somme ripetute
in linguaggio macchina (forma simbolica e indirizzi scritti in forma decimale )
indirizzo di
memoria
descrizione simbolica del
contenuto della parola di
memoria
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
..................
IN
1
STA
153
IN
1
STA
154
LDA
151
STA
156
LDA
154
STA
157
LDA
157
JZ
147
LDA
156
ADD
153
STA
156
LDA
157
SUB
152
STA
157
JMP
138
LDA
156
STA
155
OUT
2
JMP
2000
0000000000000000
0000000000000001
programma in C
leggi w;
leggi y;
sp = 0;
ns = y;
while (ns != 0)
sp = sp + w;
ns = ns -1;
z = sp;
scrivi z;
const int zero=0;
const int uno=1;
int w;
int y;
int z;
int sp;
int ns;
...................
gli indirizzi in questo esempio sono rappresentati in decimale
In questo esempio:
1 è l’indirizzo della porta di ingresso associata alla tastiera
2 è l’indirizzo della porta di uscita associata al terminale video
2000 è l’indirizzo di ritorno a Sistema Operativo
28 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Prodotto per somme ripetute in linguaggio macchina binario
indirizzo di
memoria di 12 bit
000010000001
000010000010
000010000011
000010000100
000010000101
000010000110
000010000111
000010001000
000010001001
000010001010
000010001011
000010001100
000010001101
000010001110
000010001111
000010010000
000010010001
000010010010
000010010011
000010010100
000010010101
000010010110
000010010111
000010011000
000010011001
000010011010
000010011011
000010011100
000010011101
000010011110
contenuto della parola di memoria
parole di 16 bit
C.Op
0110
0001
0110
0001
0000
0001
0000
0001
0000
0101
0000
0010
0001
0000
0011
0001
0100
0000
0001
0111
0100
0000
0000
xxxx
xxxx
xxxx
xxxx
xxxx
....
operando
000000000001
000010011001
000000000001
000010011010
000010010111
000010011100
000010011010
000010011101
000010011101
000010010011
000010011100
000010011001
000010011100
000010011101
000010011000
000010011101
000010001010
000010011100
000010011011
000000000010
011111010000
000000000000
000000000001
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
.............
In questo esempio si suppone di avere:
Parole di memoria da 16 bit.
Memoria di lavoro da 4k parole (12 bit per specificare l’indirizzo)
29 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Passi elementari per l’esecuzione delle istruzioni
fase di fetch (comune per tutte le istruzioni):
PC Registro Indirizzi
mem(Registro Indirizzi)Registro Dati – ciclo di lettura sul bus
Registro DatiRegistro Istruzione
PC+1 PC
Esempi di fase di esecuzione per alcune istruzioni
fase di esecuzione di LDA:
Registro Istruzioneoperando Registro Indirizzi
mem(Registro Indirizzi)Registro Dati – ciclo di lettura sul bus
Registro DatiAccumulatore
fase di esecuzione di ADD:
Accumulatore Operando 1
Registro Istruzioneoperando Registro Indirizzi
mem(Registro Indirizzi) Registro Dati – ciclo di lettura sul bus
Registro Dati Operando 2
sommaAccumulatore
fase di esecuzione di JZ:
se (bit di statozero= 1)
Registro Istruzioneoperando PC
fase di esecuzione di OUT:
Registro Istruzioneoperando Registro Indirizzi
Accumulatore Registro Dati
Registro Dati porta(Registro Indirizzi) – ciclo di scrittura sul bus
fase di esecuzione di STAI:
IX Registro indirizzi
Accumulatore Registro Dati
Registro Dati mem(Registro Indirizzi) – ciclo di scrittura sul bus
30 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
FASE DI FETCH
OPERANDO 1
OPERANDO 2
CPU
UNITA’
LOGICA - ARITMETICA
ALU
REGISTRO
DI STATO
ACCUMULATORE
E REGISTRI
DI LAVORO
STACK POINTER
4
PROGRAM
COUNTER
1
c.op. operando
REG. ISTRUZIONE
3
REGISTRO
DATI
BUS DATI
2
UNITA’
DI CONTROLLO
BUS CONTROLLO
2
REGISTRO
INDIRIZZI
BUS INDIRIZZI
2
MEMORIA DI LAVORO
*
1 - PC Registro Indirizzi
2 - mem(Registro Indirizzi) Registro Dati
3 - Registro Dati Registro Istruzione
4 - PC+1 PC
31 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Fase di esecuzione di LDA
OPERANDO 1
OPERANDO 2
CPU
UNITA’
LOGICA - ARITMETICA
ALU
REGISTRO
DI STATO
ACCUMULATORE
E REGISTRI
DI LAVORO
STACK POINTER
PROGRAM
COUNTER
3
c.op. operando
REG. ISTRUZIONE
1
REGISTRO
DATI
BUS DATI
2
UNITA’
DI CONTROLLO
BUS CONTROLLO
2
REGISTRO
INDIRIZZI
BUS INDIRIZZI
2
MEMORIA DI LAVORO
1 - Registro Istruzioneoperando Registro Indirizzi
2 - mem(Registro Indirizzi)Registro Dati
3 - Registro DatiAccumulatore
32 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Fase di esecuzione di ADD
OPERANDO 1
OPERANDO 2
CPU
UNITA’
LOGICA - ARITMETICA
1
ALU
ACCUMULATORE
E REGISTRI
DI LAVORO
5
REGISTRO
DI STATO
STACK POINTER
PROGRAM
COUNTER
c.op. operando
REG. ISTRUZIONE
2
4
REGISTRO
DATI
BUS DATI
3
UNITA’
DI CONTROLLO
BUS CONTROLLO
3
REGISTRO
INDIRIZZI
BUS INDIRIZZI
3
MEMORIA DI LAVORO
1 - Accumulatore Operando 1
2 - Registro Istruzioneoperando Registro Indirizzi
3 - mem(Registro Indirizzi) Registro Dati – ciclo di lettura sul bus
4 - Registro Dati Operando 2
5 - somma Accumulatore
33 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Fase di esecuzione di JZ
OPERANDO 1
OPERANDO 2
CPU
UNITA’
LOGICA - ARITMETICA
ALU
REGISTRO
DI STATO
ACCUMULATORE
E REGISTRI
DI LAVORO
1
STACK POINTER
PROGRAM
COUNTER
2
c.op. operando
REG. ISTRUZIONE
REGISTRO
DATI
BUS DATI
UNITA’
DI CONTROLLO
BUS CONTROLLO
1 - se (bit di statozero= 1)
2 - Registro Istruzioneoperando PC
34 / 50
REGISTRO
INDIRIZZI
BUS INDIRIZZI
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Fase
di esecuzione di OUT
OPERANDO 1
OPERANDO 2
CPU
UNITA’
LOGICA - ARITMETICA
ALU
REGISTRO
DI STATO
ACCUMULATORE
E REGISTRI
DI LAVORO
STACK POINTER
PROGRAM
COUNTER
c.op. operando
REG. ISTRUZIONE
2
REGISTRO
DATI
BUS DATI
3
1
UNITA’
DI CONTROLLO
BUS CONTROLLO
3
REGISTRO
INDIRIZZI
BUS INDIRIZZI
3
PORTA DI USCITA
1 - Registro Istruzioneoperando Registro Indirizzi
2 - Accumulatore Registro Dati
3 - Registro Dati porta(Registro Indirizzi) – ciclo di scrittura sul bus
35 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Fase
di esecuzione di STAI
OPERANDO 1
OPERANDO 2
CPU
UNITA’
LOGICA - ARITMETICA
ALU
REGISTRO
DI STATO
ACCUMULATORE
E REGISTRI
DI LAVORO
1
2
REGISTRO IX
STACK POINTER
PROGRAM
COUNTER
c.op. operando
REG. ISTRUZIONE
REGISTRO
DATI
BUS DATI
3
UNITA’
DI CONTROLLO
BUS CONTROLLO
REGISTRO
INDIRIZZI
BUS INDIRIZZI
3
3
MEMORIA DI LAVORO
1 - Registro Indice Registro Indirizzi
2 - Accumulatore Registro Dati
3 - Registro Dati mem(Registro Indirizzi) – ciclo di scrittura sul bus
36 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Istruzioni di chiamata e ritorno da sottoprogramma
Fase di esecuzione di CALL
1 – SP + 1 SP
// PUSH PC
2 – SP registro indirizzi
3 – PC registro dati
4 – Registro Dati mem (Registro Indirizzi) // – ciclo di scrittura sul bus (write mem)
5 – Registro Istruzioneoperando PC // salto al sottoprogramma
Fase di esecuzione di RET
1 – SP registro indirizzi
// POP PC
2 – mem (Registro Indirizzi) Registro Dati // – ciclo di lettura sul bus (read mem)
3 – SP-1 SP
4 – Registro Dati PC
Ricordare che:
La possibilità di gestire un’area di memoria a pila (stack), cioè con modalità LIFO, è di
importanza fondamentale per la chiamata di sottoprogrammi anche annidati e per il
ritorno al programma chiamante.
L’inserimento (push) di una informazione nella cima della pila (top of stack ) comporta:
incremento dello Stack Pointer
scrittura dell’informazione all’indirizzo di memoria contenuto nello Stack Pointer
L’estrazione (pop) di una informazione dalla pila (stack) comporta:
lettura dell’informazione indirizzata dallo Stack Pointer
decremento dello Stack Pointer
La chiamata di un sottoprogramma comporta infatti di
salvare il valore del Program Counter nella cima della pila (top of stack). Il valore del PC è
l’indirizzo dell’istruzione successiva (sarà usato come indirizzo di ritorno) a quella di
chiamata, e quindi è l’istruzione da eseguire al termine dell’esecuzione del sottoprogramma
forzare nel Program Counter l’indirizzo della prima istruzione del sottoprogramma da
eseguire
Il ritorno da sottoprogramma comporta invece di
estrarre dalla cima della pila (top of stack) e forzare nel Program Counter l’indirizzo di
ritorno salvato nella pila (stack) al momento della chiamata del sottoprogramma.
37 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Linguaggio ASSEMBLER
E’ il linguaggio simbolico che consente di programmare un calcolatore utilizzando le istruzioni del linguaggio
macchina. Per questo motivo viene detto linguaggio di programmazione di basso livello.
In ASSEMBLER:
ogni istruzione simbolica, rappresentata con sigle mnemoniche decise dal costruttore della CPU,
corrisponde a una e una sola istruzione in linguaggio macchina (e viceversa)
gli indirizzi di memoria sono espressi in modo simbolico utilizzando nomi, inventati dal
programmatore, che costituiscono delle “etichette” (label) associate alle posizioni di memoria.
Quindi le variabili e le istruzioni destinazione di salto sono contrassegnate da etichette e sono
citabili tramite il loro nome simbolico
esistono delle direttive (sigle mnemoniche) che consentono di riservare lo spazio di memoria
adeguato a contenere una variabile di un certo tipo
esistono delle direttive che consentono di definire dei nomi simbolici per la sostituzione letterale di
(cioè designare) valori costanti
Un programma scritto in ASSEMBLER per poter essere eseguito deve essere tradotto in linguaggio
macchina binario, in modo tale da
tradurre le sigle mnemoniche delle istruzioni nei corrispondenti codici operativi,
sostituire tutti i riferimenti simbolici degli indirizzi (nomi di variabili, etichette) con la loro forma
binaria,
e riservare lo spazio di memoria per le variabili.
L’operazione di traduzione viene eseguita da un particolare programma, detto ASSEMBLATORE.
38 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
Insieme di istruzioni assembler della CPU del nostro esempio semplice
istruzione
LDA
STA
ADD
SUB
JMP
indirizzo
indirizzo
indirizzo
indirizzo
indirizzo
JZ
indirizzo
IN
indirizzo
OUT indirizzo
CALL indirizzo
RET
LDI indirizzo
Jcond indirizzo
JC
indirizzo
JS
indirizzo
JO
indirizzo
LDAI
STAI
significato
mem(indirizzo) ACC
ACC mem(indirizzo)
ACC + mem(indirizzo) ACC
ACC - mem(indirizzo) ACC
istruzione di salto incondizionato indirizzo
PC (salta a indirizzo)
istruzione di salto condizionato
se bit di stato zero =1
indirizzo PC
porta (indirizzo) ACC
ACC porta(indirizzo)
chiamata a sottoprogramma
PC stack(Stack Pointer)
indirizzo PC
ritorno da sottoprogramma
stack(Stack Pointer) PC
mem(indirizzo) IX
istruzione di salto condizionato
dove cond è uno dei bit di stato
(C=carry, S=segno, O=overflow)
se bit di stato cond =1
indirizzo PC
mem(reg.indice) ACC
ACC mem(reg.indice
39 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
PRODOTTO PER SOMME RIPETUTE IN ASSEMBLER
N.B. si fa l’ipotesi semplificativa, ma non realistica, che dalla porta TASTIERA vengano acquisiti
valori in codifica complemento a 2.
programma in ASSEMBLER
label
operaz.
EXIT
EQU
PORTA_TASTIERA EQU
PORTA_VIDEO
EQU
IN
STA
IN
STA
LDA
STA
LDA
STA
WHILE
LDA
JZ
LDA
ADD
STA
LDA
SUB
STA
JMP
ENDWHILE
LDA
STA
OUT
JMP
ZERO
DW
UNO
DW
W
DW
Y
DW
Z
DW
SP
DW
NS
DW
programma in C
operando
2000
1
2
PORTA_TASTIERA
W
PORTA_TASTIERA
Y
ZERO
SP
Y
NS
NS
ENDWHILE
SP
W
SP
NS
UNO
NS
WHILE
SP
Z
PORTA_VIDEO
EXIT
0
1
?
?
?
?
?
// direttiva def. cost
// direttiva def. cost
// direttiva def. cost
leggi w;
leggi y;
sp = 0;
ns = y;
while (ns != 0)
sp = sp + w;
ns = ns -1;
z = sp;
scrivi z;
const int zero=0;
const int uno=1;
int w;
int y;
int z;
int sp;
int ns;
label EQU valore è una direttiva con la quale label assume il ruolo di costante simbolica
label DW valore oppure
label DW ?
(DW = Define Word): direttiva all’assemblatore per riservare in quella posizione una parola di
memoria per la variabile di nome label eventualmente inizializzata a valore
Le etichette (label) sono i nomi che il programmatore sceglie per le variabili (ma anche per le istruzioni) e
costituiscono la forma simbolica che rappresenta gli indirizzi.
40 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
ESEMPIO 1- SOMMA N VALORI INTERI - SCHEMA A BLOCCHI
Si vuole calcolare la somma di N valori interi forniti dall’utente. Il numero di valori da acquisire (N) è fornito
dall’utente.
inizio
leggi N
no
CONT - numero somme
si
N=0 ?
SOMMA := 0
CONT := 0
CONT = N ?
N n. di dati (addendi)
SOMMA - risultato
si
no
leggi VALORE
SOMMA := SOMMA + VALORE
CONT := CONT + 1
scrivi SOMMA
fine
41 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
ESEMPIO 1- SOMMA N VALORI INTERI - PROGRAMMA IN ASSEMBLER
N.B. si fa l’ipotesi semplificativa, ma non realistica, che dalla porta TASTIERA vengano acquisiti valori in
codifica complemento a 2.
Si noti che dopo il punto e virgola (semicolon) il seguito della linea è considerato commento
Si vuole calcolare la somma di N valori interi forniti dall’utente. Il numero di valori da acquisire (N) è fornito
dall’utente.
;********************************************************
;Programma di calcolo della somma di N interi in ingresso
;********************************************************
EXIT
EQU 2000
PORTA_TASTIERA EQU 1
PORTA_VIDEO
EQU 2
START
IN
PORTA_TASTIERA ;acquis. valore
STA N
;assegna a var. N
JZ
FINE
; se zero finisce
LDA ZERO
STA SOMMA
;inizializza
LDA ZERO
;le variabili
STA CONT
CICLO
LDA CONT
SUB N
;confronta CONT con N
JZ
VISUALIZZA
;se eguali va a visual.
IN
PORTA_TASTIERA
STA VALORE
;acquis. nuovo valore
LDA SOMMA
ADD VALORE
;aggiunge a SOMMA
STA SOMMA
LDA CONT
ADD UNO
;incrementa CONT
STA CONT
JMP CICLO
;torna a ripetere ciclo
VISUALIZZA
LDA SOMMA
OUT PORTA_VIDEO
FINE
JMP EXIT
;torna a Sist. Operativo
;allocazione delle celle per le variabili
ZERO
DW
0
UNO
DW
1
N
DW
?
CONT
DW
?
SOMMA
DW
?
VALORE
DW
?
42 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
ESEMPIO 2- DIVISIONE TRA INTERI - SCHEMA A BLOCCHI
La divisione N1/N2 viene effettuata, con questo algoritmo, per sottrazioni successive, con l’ipotesi
N2 > 0 e N10. L’algoritmo calcola il risultato RIS e il resto RESTO della divisione intera.
inizio
leggi N1
leggi N2
N2 > 0 ?
no
si
RIS := 0
RESTO := N1
si
RESTO < N2 ?
no
RESTO := RESTO - N2
RIS := RIS + 1
scrivi RIS
scrivi RESTO
fine
43 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
ESEMPIO 2- DIVISIONE TRA INTERI - PROGRAMMA IN ASSEMBLER
N.B. si fa l’ipotesi semplificativa, ma non realistica, che dalla porta TASTIERA vengano acquisiti valori in
codifica complemento a 2.
La divisione N1/N2 viene effettuata, con questo algoritmo, per sottrazioni successive, con l’ipotesi N2 > 0 e
N10. L’algoritmo calcola il risultato e il resto della divisione intera.
;************************************
; esempio di programma di divisione tra interi positivi
;************************************
;*** direttive di definizione di costanti
EXIT
EQU 2000
PORTA_TASTIERA
EQU 1
PORTA_VIDEO
EQU 2
;*** inizio programma
START
IN
PORTA_TASTIERA ; acquisisce dividendo
STA N1
IN
PORTA_TASTIERA ; acquisisce divisore
STA N2
JZ
FINE ; se divisore =0 salta a fine
LDA ZERO
STA RIS ; inizializza risultato
LDA N1
STA RESTO
;********** ciclo di sottrazioni successive
CICLO
LDA RESTO
SUB N2
JS
SCRIVI ; se RESTO < 0 fine ciclo di sottrazioni
LDA RESTO
SUB N2
; sottrazioni successive
STA RESTO
LDA RIS
; ad ogni sottrazione
ADD UNO
; incrementa di uno
STA RIS
; il risultato
JMP CICLO
;********** fine ciclo di sottrazioni
SCRIVI
LDA RIS
OUT PORTA_VIDEO
LDA RESTO
OUT PORTA_VIDEO
FINE
JMP EXIT ; torna al sistema operativo
; ***
; *** direttive di dichiarazione delle variabili
ZERO
DW
0
UNO
DW
1
N1
DW
?
N2
DW
?
RIS
DW
?
RESTO
DW
?
44 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
MODALITÀ DI INDIRIZZAMENTO E FORMATO ISTRUZIONI MACCHINA
Formato istruzione:
Codice Operativo
Codice Operativo:
Campo Operando:
Operando
indirizzo
parola di memoria
m bit (2m istruzioni distinte)
n bit (2n indirizzi distinti)
Il linguaggio macchina della maggior parte delle CPU, e quindi il corrispondente linguaggio ASSEMBLER,
prevede diverse modalità di indirizzamento (oltre a quello diretto) che rendono il set istruzioni più potente
e consentono maggior flessibilità ed efficienza.
La modalità di indirizzamento è un campo aggiuntivo nel formato istruzione e definisce il modo in cui deve
essere utilizzato il valore presente nel Campo Operando per calcolare l’indirizzo dell’operando stesso.
FORMATO ISTRUZIONE:
Codice Operativo
Mod. Indir.
Codice Operativo:
Modalità di Indirizzamento:
Campo Operando:
Operando
indirizzo
parola di memoria
m bit (2m istruzioni distinte)
s bit (2s modalità distinte)
n bit (2n indirizzi distinti)
Non tutte le istruzioni ASSEMBLER ammettono tutte le modalità di indirizzamento previste per la CPU.
indirizzamento diretto:
il Campo Operando contiene l’indirizzo dell’operando stesso
viene eseguito un accesso a memoria per accedere all’operando
V= indirizzo di memoria, ad es. di una variabile
in ASSEMBLER:
etichetta
Ad esempio:
LDA V
; il significato è
mem(V)A
indirizzamento indiretto:
il Campo Operando contiene l’indirizzo di memoria di una parola che contiene l’indirizzo
dell’operando
occorrono due accessi a memoria per accedere all’operando
P = indirizzo di memoria che contiene un puntatore (cioè indirizzo) all’operando
in ASSEMBLER:
@etichetta
Ad esempio:
LDA @P
; il significato è
mem(mem(P))A
45 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
indirizzamento relativo a registro indice:
il Campo Operando contiene un indirizzo di memoria che viene sommato al contenuto del
registro indice IX per ottenere l’indirizzo dell’operando
Questa modalità consente di indirizzare in modo parametrico una parola all’interno di una
sequenza di parole di memoria contigue, cioè di un array.
(Campo Operando = indirizzo base dell’array e valore di I = indice, cioè spiazzamento dall’inizio
dell’array)
V = indirizzo di memoria del primo elemento di una sequenza (array)
in ASSEMBLER:
Ad esempio:
LDA V(IX)
etichetta(IX)
; il significato è
mem(V+IX) A
indirizzamento immediato:
il Campo Operando contiene direttamente il valore (che in questo caso è una costante)
dell’operando (il valore può essere espresso in modo esplicito oppure simbolico)
N = valore di una costante
in ASSEMBLER:
Ad esempio:
LDA #N
#etichetta (o valore)
;il significato è
N A
46 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
ESEMPIO 3A- CALCOLO DEL MASSIMO IN UN ARRAY DI INTERI
N.B. si fa l’ipotesi semplificativa, ma non realistica, che dalla porta TASTIERA vengano acquisiti valori in
codifica complemento a 2.
Si vuole acquisire una sequenza di N ( Nmax) valori interi, memorizzarli in un array, e trovare il valore
massimo e la sua posizione. Si ipotizzi che i valori acquisiti siano 0.
;*******************************************
; *** Acquisizione dei valori di elementi di un array
; *** Ricerca del massimo in un array di interi
;*******************************************
; *** definizione delle costanti
EXIT
EQU 2000
PORTA_TASTIERA
EQU 1
PORTA_VIDEO
EQU 2
ZERO
EQU 0
UNO
EQU 1
NMAX
EQU 10
; *** Inizio del codice
START
IN
PORTA_TASTIERA ; acquisisce numero di elementi
STA N
JZ
FINE ; se N = 0 nessun elemento da acquisire
; --- verifica che ci stiano nell’array
LDA #NMAX
SUB N
JS
FINE
; se N > Nmax
LDA #ZERO
STA CONT
LDI CONT
; --- ciclo di acquisizione
ACQUISISCI
LDA CONT
SUB N
JZ
CALCOLA
; qui CONT = N – fine acquisizione
IN
PORTA_TASTIERA ; acquisisce dato
STA DATI(I)
; inserisce in array posizione I
LDA CONT
ADD #UNO
STA CONT
; incrementa contatore e indice
LDI CONT
JMP ACQUISISCI
; --- prepara contatore e indice per la ricerca del max
CALCOLA
LDA #ZERO
STA CONT
LDI CONT
LDA DATI(I)
STA MAX
; per ora assume il primo come max
LDA CONT
STA POSMAX
; --- ciclo di scansione dell’array per ricerca max
CICLO
LDA CONT
47 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
ADD #UNO
STA CONT
LDA CONT
SUB N
JZ
SCRIVI
; qui valutati tutti gli N elem.
LDI CONT
LDA DATI(I)
SUB MAX
JS
CICLO
; ricicla
LDA DATI(I)
; qui trovato un nuovo max
STA MAX
LDA CONT
STA POSMAX
JMP CICLO
; --- fine ciclo ricerca max
SCRIVI
LDA MAX
; stampa risultati
OUT PORTA_VIDEO ; scrive il valore max
LDA POSMAX
OUT PORTA_VIDEO ; scrive la posizione del max
FINE
JMP EXIT
; torna a sistema operativo
; *** Dichiarazione delle variabili
N
DW
? ; numero elementi presenti in array
CONT
DW
? ; contatore di servizio per i cicli
MAX
DW
? ; valore max trovato
POSMAX
DW
? ; posizione di max nell’array
DATI
DW
? ; array di interi
DW
?
DW
?
DW
?
DW
?
DW
?
DW
?
DW
?
DW
?
DW
?
48 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
ESEMPIO 3B- CALCOLO DEL MASSIMO IN UN ARRAY DI INTERI
Versione con chiamata a sottoprogramma per l’aggiornamento del massimo e della sua posizione.
;**********************************************
;dichiarazione di costanti simboliche
EXIT
EQU 2000
PORTA_TASTIERA
EQU 1
PORTA_VIDEO
EQU 2
ZERO
EQU 0
UNO
EQU 1
NMAX
EQU 10
;************************************************
;inizio programma
START
IN
PORTA_TASTIERA ;acquis. numero elementi
STA N
JZ
FINE
; se zero finisce
LDA #NMAX
SUB N
;se maggiore delle dimens. array
JS
FINE
;finisce
LDA #ZERO
STA CONT
;inizializza CONT
ACQUISISCI
LDA CONT
SUB N
;se CONT=N
JZ
CALCOLA
;esce dal ciclo di acquisiz.
IN
PORTA_TASTIERA ;acquis. elemento
LDI CONT
;carica reg. indice
STA DATI(I)
;assegna elemento in array
LDA CONT
ADD #UNO
STA CONT
;incrementa CONT
JMP ACQUISISCI
;ricicla
CALCOLA
LDA
STA
LDI
CALL
#ZERO
CONT
CONT
AGGIORNA
;ricomincia da inizio array
49 / 50
Fondamenti di informatica – Prof. Lorenzo Mezzalira – Fascicolo 2
CICLO
LDA CONT
ADD #UNO
STA CONT
SUB N
JZ
SCRIVI
LDI CONT
LDA DATI(I)
SUB MAX
JS
CICLO
;qui trovato nuovo max
CALL AGGIORNA
JMP CICLO
SCRIVI
FINE
LDA
OUT
LDA
OUT
JMP
;se CONT=N esce dal ciclo
;carica registro indice
;indirizz. Con reg. indice
;minore del max - ricicla
;aggiorna max
;ricicla
MAX
PORTA_VIDEO
POSMAX
PORTA_VIDEO
EXIT
;FINE – torna a Sist. Operativo
;**********************************************************
;sottoprogramma di aggiornamento dei valori provvisori
; del max e della sua posizione
;**********************************************************
AGGIORNA
LDA DATI(I)
;indirizz. Con reg. indice
STA MAX
LDA CONT
STA POSMAX
RET
***********************************************************
; Area delle variabili
N
DW
?
CONT
DW
?
MAX
DW
?
POSMAX
DW
?
DATI
DW
?
;spazio per gli elementi dell’array
DW
?
DW
?
DW
?
DW
?
DW
?
DW
?
DW
?
DW
?
DW
?
50 / 50