Tecniche di
Post-processing
TsrmDr.
Dr.Daniele
DanieleDi
DiFeo
Feo
Tsrm
DirU.O.
U.O. Dr
DrC.Fonda
C.Fonda
Dir
A.O.U.Meyer
Meyer Firenze
Firenze
A.O.U.
introduzioni
Gli algoritmi di visualizzazione tridimensionale
richiedono l’uso di dati di tipo volumetrico, cioè
che definiscano una regione tridimensionale
nello spazio. Questo tipo di dati provengono
generalmente da modalità di acquisizione di tipo
topografico cioè in grado di acquisire volumi di
dati di tipo tridimensionali
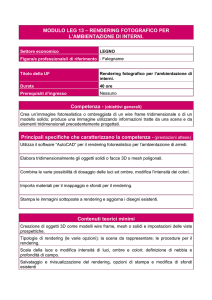
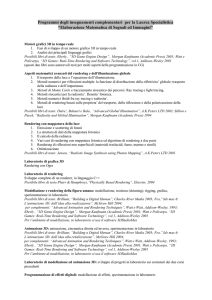
TCS single-slice
TCS multi-slice
Acquisizione volumetrica
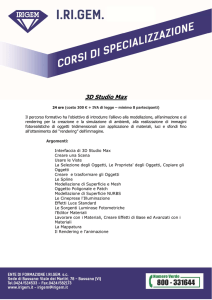
VOXEL
ANISOTROPICO
VOXEL
ISOTROPICO
X=Y≠Z
X=Y=Z
Voxel: Anisotropia ed isotropia dati
Single slice (512*512)
pixel 0.625
16 slice (512*512)
pixel 0.625
Th 5mm
Th 1.25
16 slice (512*512)
pixel 0.625
Th 0.625
La condizione ideale si ha quando i
voxel sono isotropici
Nel caso in cui questo non avvenga, il
volume sarà sottoposto ad
interpolazione che introduce errori
tanto piu’ gravi quanto piu’ la forma
differisca da quella cubica
Flusso processo radiologico
Sintesi di rielaborazione
Tecniche di ricostruzioni
Bidimensionali :
•retroricostruzioni con kernel e fov differenti
•MPR
Tridimensionali:
•MIP
•Min-IP
•SSD
•perspective rendering
•VRT
MPR
MPR: Multilplanar reformation
È il piu’ semplice e comune metodo di
rappresentazione dei dati
In tc il dataset è costituito da una serie di
slice assiali parallele e (contigue?) tra loro,
può essere pensato come un unico voxel 3d.
Utilizza generalmente l’agoritmo
Average Intensity Projection (AIP)
MPR
tali dati possono essere ricostruti su
piani diversi da quelli principali (assiali,
coronali, sagittali) prendendo angoli e
direzioni variabili compresi piani curvi
Attenzione: le misurazioni su piani
curvi possono essere distorte
MPR
MPR su piano curvo
MPR
MIP, MIN, RAY SUM, AIP
1.
I dati di partenza sono costituiti da una
serie di slice tra loro parallele ed
equidistanti
2.
stabilita una direzione di proiezione si
individuano una serie di raggi paralleli alla
direzione di proiezione che attraversano le
slice
3.
Per ogni raggio avremo quindi una serie di
valori corrispondente all’ intensità di
segnale del pixel attraversato in ogni slice
MIP, MIN, RAY SUM, AIP
MIP
MIP: maximum intensity projection
tra tutti i valori viene scelto quello di valore
massimo , che viene riportato sull’ immagine
proiettata che costituisce la visione 3D
desiderata
MIP
MIP
Utilizza il10% dei dati complessivi:
utilizzo “storico” per RAM limitate
Mip-thin
Talvolta
onde evitare sotto o
sovrastime
di
eventuali
lesioni
(es stenosi di vasi) conviene utilizzare
il Thin MIP cioè una sovrapposizione di
volumi con spessori inferiori a quello
totale
MIP-Thin
MIN-IP
MIN-IP: minumum intensity projection
tra tutti i valori viene scelto quello di
valore minimo, che viene riportato sull’
immagine proiettata che costituisce la
visione 3D desiderata
MIN-IP
Raysum
tutti i valori ottenuti vengono sommati e il
valore risultante viene riportata
sull’ immagine proiettata.
È poco utilizzato
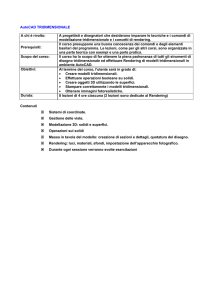
Average Intensity
Projection
AIP: Intensità media di proiezione
L'immagine rappresenta la media del valore di attenuazione (TC)
intensità di segnale (RM) di ciascun componente incontrate da un
raggio attraverso un oggetto verso l'occhio del telespettatore .
Partendo da un MPR con uno spessore di solo 1 pixel
(es. 0,5-0,8 mm), l’ AIP può essere utilizzato per produrre immagini
che hanno un aspetto simile al tradizionale assiale per quanto
riguarda le immagini a bassa risoluzione di contrasto.
Questo può essere utile per caratterizzare le strutture interne di un
organo solido o le pareti della cavità di strutture come i vasi
sanguigni o l'intestino.
AIP
AIP utilizza la media attenuazione dei
dati per calcolare il valore previsto. È il
classico algoritmo che viene utilizzato
negli MPR
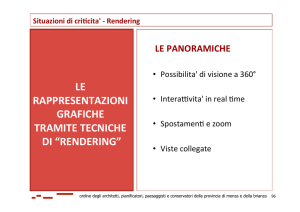
AIP
(a), coronale riformattato immagine
creata con uno spessore di default di
1 pixel (circa 0.8 mm).
(b) riformatt. di 4 millimetri utilizzando AIP
• l'immagine con meno rumore
• migliore risoluzione di contrasto.
MIN-IP
AIP
MIP
3D
Correntemente il termine volume rendering è
utilizzato oltre che per riferirsi a elaborazioni
tridimensionale di volume vere e proprie anche
ad elaborazioni 3D di superficie o gli approcci a
proiezioni quali MIP
SSD
Perspective Volume Rendering
VRT
Elaborazione tridimensionali
di superficie
consistono in algoritmi che approssimano la
superficie dell’ oggetto in studio ad insiemi
di primitive bidimensioli (generalmente
poligoni o triangoli) adiacenti tra loro
Spesso sono associati schede video dedicate
che visualizzano tali poligoni dando così un
effetto 3D
Elaborazione tridimensionali
di superficie
Maggiore è il numero di poligoni
utilizzati maggiore è l’accuratezza della
ricostruzione.
Opportuni algoritmi associano
di diffusione e riflessione
(SHADING) aumentando l’
tridimensionalità.
infine effetti
della luce
illusione di
studi di superficie
vantaggi
riduzione dei dati da
elaborare ad una lista di
poligoni ed all’ elenco
delle connessione tra gli
stessi con la riduzione
dei tempi di calcolo.
svantaggi
necessità di separare,
o segmentare
l’oggetto di interesse
dagli oggetti adiacenti:
un errore in questa fase
porta ad un errore nella
rappresentazione 3D.
SSD
SSD: Shaded surface display o surface rendering
è una tecnica di rendering di superficie con cui si
ottengono i modelli 3d di aspetto plastico a cui è
possibile attribuire diverse colorazioni ed effetti di
trasparenza/opacità con estrema facilità
La procedura si basa sull’ esclusione dal volume
acquisito di origine, di tutti i voxel che non
rispettano la condizione di soglia densitometrica
(threshold range). l’operatore dispone di altri
strumenti per selezionare e deselezionare parti di
volume di partenza al di là delle differenze di
densitometrie ad esempio inclusione od esclusione
di strutture isodenze in base al ritaglio manuale.
SEGMENTAZIONE
Il limite fondamentale nell’ approccio a superfici è la
necessità di separare, o segmentare , l’oggetto di
interesse dagli oggetti adiacenti: un errore in
questa fase porta ad un errore nella
rappresentazione 3D.
Metodi di segmentazione:
A “soglia” di intensità che discriminano un tessuto
dall’altro. In questo caso alcune regioni dell’
immagine verranno utilizzate mentre altre verranno
scartate.
A “contorni” attraverso i quali vengono definite le
forme anatomiche.
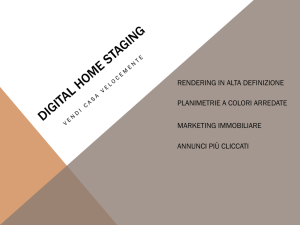
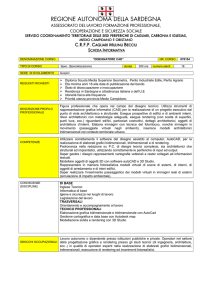
Segmentazione (1)
A
B
A: approccio a contorni
B: approccio a soglia
Segmentazione (2)
La Segmentazione non è altro che
l’azione di includere o escludere
alcune porzioni di immagine per
evidenziare
selettivamente
le
strutture di interesse
Region-of-Interest Editing
È il metodo di segmentazione più semplice.
Con una sorta di “bisturi virtuale” (sagomato o
a mano libera) possiamo decidere se includere
od escludere quindi rimuovere una regione di
interesse
Alcuni software danno la possibilità di
rimuovere anticipatamente oggetti su ogni
immagine assiale, mentre altri consentono la
rimozione di oggetti o bidimensionale o
immagini 3D.
Segmentazione
Perspective Volume Rendering (1)
assume un punto di vista a distanza finita, (di solito
all'interno di un lume), e viene utilizzato per simulare
l'endoscopia a fibra ottica.
Piuttosto che essere raggi di luce paralleli, le
proiezioni sono raggi di luce concentrata a
convergere sul punto di vista, che simula la luce
naturale convergenza sulla retina umana .
La conseguente distorsione facilita la percezione della
distanza sulla base delle dimensioni oggetto.
Perspective Volume Rendering (2)
Oggetti in prossimità del punto di vista appaiono
grandi, mentre oggetti distanti sembrano piccoli
può essere utile nella pianificazione delle
procedure endoscopiche e può facilitare un
apprezzamento intuitiva dei rapporti tra strutture
anatomiche
Perspective
Volume-Rendering
Volume rendering
In senso rigoroso si intende un processo che
fornisce una rappresentazione di dati senza
utilizzare
processi
di
segmentazione
intermedi impliciti od espliciti.
preserva l’ informazione contenuta nei dati
volumetrici.
“direct volume rendering” (rendering
volumetrico diretto) per caratterizzare il
fatto che la visualizzazione tridimensionale
opera direttamente sul volume dei dati
senza utilizzare rappresentazion intermedie.
Volume rendering
caratterizzazione dei voxel del volume rispetto ad
una sorgente luminosa incidente.
L’informazione che possediamo è il livello di grigio
o il valore di intensità del segnale associato al
singolo voxel.
Solitamente ad un voxel vengono associate
2 caratteristiche fondamentali:
1. opacità ( cioè la quantità di luce che può
attraversare il voxel)
2. shading ( cioè il modo con cui il voxel riflette
o diffonde la luce che lo colpisce).
Fig 7.1
Algoritmo di base vrt
•una matrice di voxel viene illuminato da una o piu’ sorgenti luminose
•I raggi luminosi provenienti dalle sorgenti vengono riflessi o diffusi dai
voxel del volume sulla base delle loro caratteristiche.
•Alcuni raggi riflessi viaggiano in direzione di uin osservatore e vanno
a formare una immagine che rappresenta il volume 3D visto da un
osservatore da un certo punto di vista.
Funzione di opacità
L’ opacità del voxel è un volore variabile :
0 o 0%(voxel trasparente e quindi invisibile)
1 o 100% (voxel completamente opaco e quindi
nasconderà completamente i voxel dietro esso)
I valori intermedi rappresentano condizioni di
semitrasparenza
Funzione di opacità
n.b. la corrispondenza tra valore di
intensità del voxel e grado di trasparenza
può essere decisa dall’ utente per
ottenere l’effetto grafico voluto.
Es. in immagini tc cerebrali se 0= opacità tessuti molli, si
evindezierà il renbdering delle ossa craniche, se è 0,5
osserveremo i tessuti molli in trasparenza e dietro essi le ossa.
Funzione di shading
associa ad ogni voxel i parametri che definiscono
come il voxel stesso risponde alle sorgenti di
illuminazione che vengono utilizzate.
si tratta di calcolare l’angolo tra la luce
proveniente da una sorgente ed una superficie
che descrive l’ oggetto da visualizzare e calcolare
la luce riflessa e diffusa in base all’ angolo di
incidenza
ed alle proprietà che vengono
assegnate alla superficie in esame.
Vrt Vs SSD
Quello che differenzia il caso del rendering
volumetrico è che, visto che si opera direttamente
sul volume dei dati , non è definita alcuna
superficie. Si deve estrarre quindi una “superficie
virtuale” dai dati che viene utilizzata solo per il
calcolo delle condizioni di illuminazione.
Il metodo piu’ semplice è quello di calcolare il cosiddetto gradiente del volume dei dati:
GRADIENTE DEL VOLUME DEI DATI:
è la differenza tra il valore del voxel stesso ed il valore dei voxel adiacenti: nelle regioni
del volume dove l’ intensità dei voxel è costante avremo un valore basso o nullo di
gradiente , mentre nelle regioni dove sono presenti delle discontinuità avremo valori piu’
alti. Scegliendo la mappa di gradiente opportunamente filtrata come superficie virtuale
per il calcolo dell’ illuminazione simuleremo
l’ effetto della riflessione della luce sui bordi degli oggetti
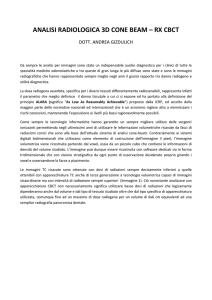
A= funzione di opacità
B= funzione di opacità
e shading
Fig 5 a b c d
Volume rendering
Vantaggi
tutte
le
informazioni
contenute nei dati vengono
mantenute durante tutte le
fasi di ricostruzione: è possibile
quindi ritagliare in modo interattivo
alcune
zone
dell’
immagine
tridimensionale per poter esaminare
anche regioni interne (non possibile
nell’ approccio a superfici )
È
la possibilità di rendere
semitrasparente o trasparente
alcune zone dell’ organo in
esame per meglio evidenziare
le zone piu’ interne.
Svantaggi
Lo svantaggio
principale delle
tecniche volumetriche
è dato dalla grande
mole di dati da
manipolare nelle varie
fasi dell’ algoritmo:
lunghi tempi di
elaborazione .
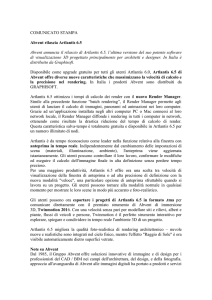
Vassel view
Sono software che
associano vari tipi di
rielaborazioni al fine di
avere
misure
ed
indicatori di patologia
oggettivi
Infatti uno dei problemi
fondamentali è dato
dalla definizione dei
calibri reali dei vasi che
si dispongono nello
sapzio su piani curvi
È fondamentale
conoscere i limiti delle
ricostruzioni per non
incorrere in gravi errori
Nelle immagini la stessa lesione varia da 4 a
2 mm variando i parametri di rielaborazione:
stenosi del 35%, 55% e 65%,
Ma attenzione !!!
Ma attenzione !!!
“i computer sono inutili, possono dare
solo risposte”
Pablo Picasso
[email protected]