Capitolo 1
Cinematica del punto materiale
Introduzione
La Cinematica si occupa della descrizione del moto. Utilizzeremo i vettori, le funzioni di
una variabile, la geometria, ecc... per descrivere il moto di un punto materiale o di un
corpo tridimensionale. Cominceremo dal punto materiale, cioè da un corpo le cui
dimensioni siano tanto piccole rispetto alle altre dimensioni in gioco da potersi
considerare un punto. Il contenuto della cinematica è prevalentemente matematico: essa
riutilizza tutta la matematica già studiata nell’introduzione e, naturalmente, nei corsi di
matematica propedeutici al corso di fisica. Il contenuto di fisica è invece modesto. La
fisica moderna entrerà in gioco davvero con la dinamica, dove compaiono nuovi principi,
diversi da quelli della fisica aristotelica. Comunque, le definizioni esatte di velocità e
accelerazione sono il frutto dell’analisi matematica i cui fondamenti furono posti da I.
Newton (1642-1727) e G. W. von Leibniz (1646-1716), dunque sono moderne, segno che
la fisica precedente non aveva veramente bisogno di una rigorosa definizione di questi
concetti.
1.
Sistemi di coordinate
Abbiamo già visto nell’introduzione matematica che coordinate cartesiane, sferiche, polari
e cilindriche possono essere usate per definire la posizione di un punto. Facciamo un
breve cenno adesso ad alcuni sistemi di coordinate usate in contesti speciali.
L’uso dell’uno o dell’altro sistema di coordinate è una questione di convenienza. Alcuni
problemi sono più facilmente risolvibili utilizzando un certo sistema. Evidentemente i
problemi che presentano una simmetria tale da ridurre il numero di variabili in un sistema
di coordinate vanno trattati usando quel tipo di coordinate. Di ciò daremo molti esempi
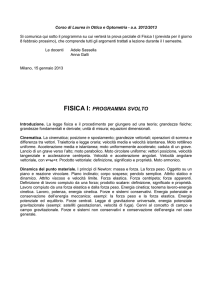
nel seguito. Eccovene subito uno ben noto: le coordinate terrestri. Un punto sulla Terra è
assimilabile ad un punto su una sfera, anche se la forma della Terra non è esattamente una
sfera. La sfera ha un raggio costante, dunque ρ è noto una volta per tutte
( ρ = RT ≅ 6400 km). Tutto quello che occorre per definire un punto sulla Terra sono due
angoli θ e φ. Dobbiamo perciò definire un piano X-Y, che prendiamo coincidente col
piano equatoriale.
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
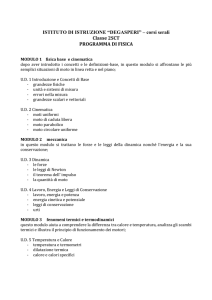
N
Latitudine
Meridiano di
Greenwich
Q
Piano equatoriale
Longitudine
Fig. 5: Latitudine e longitudine.
L’origine è nel centro della Terra e l’asse Z coincide con l’asse di rotazione terrestre. Ci
serve ancora un piano X-Z per definire il sistema d’assi. Poiché l’ intersezione del piano
X-Z con la Terra è un cerchio massimo (meridiano), possiamo scegliere un punto
qualunque sulla Terra per definire questo cerchio e dunque il piano X-Z. Per ragioni
storiche, si è scelto il cerchio massimo passante per Greenwich, vicino Londra, sede di un
importante osservatorio astronomico. Si noti che l’angolo φ (longitudine) varia da 00 a
3600, mentre θ varia da 00 a 1800. La latitudine (che è l’angolo complementare a θ) varia
da 00 a +900 (in direzione nord) e da 00 a -900 (sud), mentre la longitudine varia da 00 a
+1800 (in direzione est) e da 0 a -1800 (ovest).
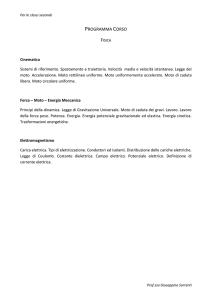
La stessa cosa si fa per definire la posizione angolare di una stella. Si sceglie il piano
equatoriale come piano X-Y. L’asse Z è dunque parallelo all’asse di rotazione terrestre.
L’origine è nel Sole, ma si tenga presente che la distanza Sole-Terra (1,5.1011m) è
trascurabile, pur essendo enorme, rispetto alla distanza Sole-stella (per qualunque stella).
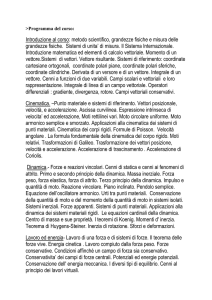
N
Piano equatoriale
Declinazione
23
Eclittica
0
Ascensione retta
γ
Fig. 6: Ascensione retta e declinazione.
2
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
Due angoli (θ e φ), dunque, danno la posizione angolare della stella. Si ignora la distanza
ρ perché è spesso irrilevante (per esempio, per puntare un cannocchiale basta conoscere
gli angoli) o perché è difficilissima da misurare e forse ignota. Le due coordinate sono
chiamate: Declinazione (θ) e Ascensione Retta (φ). L’asse X è dato dalla retta
d’intersezione tra il piano equatoriale e l’eclittica (piano di rivoluzione terrestre).
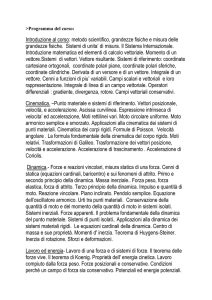
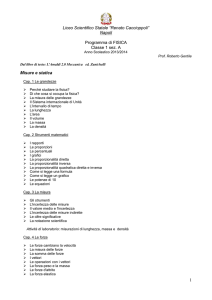
C’è un terzo caso, sempre in relazione alle stelle, in cui è conveniente usare le coordinate
sferiche. È il caso di un osservatore che misura la posizione angolare di una stella. Il
sistema ha come piano X-Y il piano orizzontale e come asse Z la verticale del luogo.
L’origine è nella posizione dell’osservatore. Di conseguenza l’origine dipende dalle
coordinate geografiche dell’osservatore. Evidentemente anche l’orientazione dell’asse Z
dipende dalla longitudine e dalla latitudine dell’osservatore. L’orientazione dell’asse X è
quello dell’asse Nord-Sud. Si misurano due angoli: l’angolo a partire dal piano orizzontale
(θ è chiamata “altezza” della stella) da 00 a 900 (sotto l’orizzonte non si vede nulla!).
L’angolo sul piano orizzontale a partire dalla direzione nord tra 00 e 3600 (Azimut).
Verticale
Altezza
Azim
N
Piano
orizzontale
Fig. 7: Altezza e Azimut.
2.
Trasformazioni di coordinate. Traslazioni e rotazioni
Per varie ragioni è necessario talvolta passare da un sistema di riferimento ad un altro. Per
esempio, è possibile che sia preferibile o più semplice impostare un problema in un certo
sistema e che sia però necessario esprimere la soluzione in un altro, dove è più facile
avere dei risultati sperimentali (vedi esempio al paragrafo successivo) con i quali
confrontare i risultati del calcolo. Le trasformazioni che permettono di passare da un
sistema di coordinate all’altro sono: la traslazione, la rotazione lungo un asse e tutte le
combinazioni di queste due operazioni. La traslazione consiste in una ridefinizione
dell’origine che lascia però l’orientazione degli assi invariata.
3
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
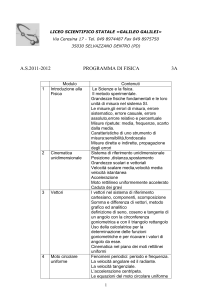
Z'
Z
z 0'
O'
Y’
X’
O
y 0'
Y
x 0'
X
Fig. 8: Traslazione degli assi.
x = x'+ x o '
y = y '+ y o ' e viceversa:
z = z '+ z
o'
Poiché
le
coordinate di O'
(origine del nuovo
sistema
di
riferimento) sono
xo', yo', zo', è
evidente che le
coordinate di un
punto
P(x',y',z')
sono date nel
sistema S, dalla
semplice somma
delle coordinate
del punto in S' e
delle coordinate di
O' in S:
x' = x − x o
y' = y − y o
z' = z − z
o
Consideriamo adesso una rotazione. Il caso più semplice è quello di un sistema ruotato
intorno all’asse Z del primo sistema.
Y’
α
Y
X’
j
j'
i'
α
i
X
In fig. 9 abbiamo il caso di
un sistema S’ ruotato di un
angolo α rispetto a S.
Prendiamo
un
vettore
qualsiasi a , che potrebbe
essere, per esempio, un
vettore posizione:
a = a x ' í '+ a y ' j ' =
= a x ' (cos αi + senαj ) +
Fig. 9: Rotazione degli assi.
a y ' (−senαi + cos αj ) =
= ( a x ' cos α − a y 'senα )i + ( a x 'senα + a y ' cos α ) j = a x i + a y j .
4
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
La regola di trasformazione delle componenti di un vettore sotto una rotazione è pertanto:
a x = a x ' cos α − a y ' senα
a y = a x ' senα + a y ' cos α
x = x' cos α − y ' senα
In particolare le coordinate trasformeranno secondo le formule:
y = x' senα + y ' cos α
3.
Trasformazioni improprie: parità ed inversione temporale
Un tipo particolare di trasformazione, detta trasformazione di parità, è quello in cui la
direzione dei tre assi viene invertita: x → − x; y → − y; z → − z . È facile convincersi che
questa trasformazione non è realizzabile attraverso rotazioni. Tuttavia è possibile ottenere
il nuovo sistema di riferimento anche attraverso l’inversione di un solo asse (per esempio
X) seguito da una rotazione (intorno a X). Poiché il senso dato agli assi del sistema di
riferimento è una mera convenzione, ci aspettiamo che le leggi fisiche siano immutate
sotto una trasformazione di parità o, detto in altre parole, l’immagine speculare di un
fenomeno fisico deve rappresentare un fenomeno fisico possibile. Per esempio un punto
materiale che si muove lungo l’asse positivo delle X, si muoverà lungo l’asse negativo se
si inverte l’asse stesso. Evidentemente un punto materiale che si muove lungo l’asse
negativo è un fenomeno fisico possibile. Per quanto tutto ciò sembri banale, esistono
fenomeni nel campo della fisica nucleare (per esempio i decadimenti beta) in cui
l’immagine speculare di un fenomeno, non è un fenomeno fisico possibile.
Possiamo anche pensare di invertire “l’asse dei tempi” ovvero la sequenza temporale di un
avvenimento e otterremo ancora un fenomeno fisico possibile. Per esempio, un punto
materiale che si muove lungo l’asse X positivo, si muoverà in senso inverso, se invertiamo
l’asse dei tempi; evidentemente il punto materiale che si muove all’inverso è pure un
fenomeno fisico possibile. Questo è vero a livello di fenomeno elementare: tuttavia “la
freccia del tempo” punta in una sola direzione.
4.
Equazioni orarie, velocità e traiettoria
È importante notare che le coordinate di qualunque tipo sono funzioni del tempo, se un
punto è in moto. Più precisamente, devono essere funzioni continue del tempo. Le
equazioni che danno le coordinate in funzione del tempo sono dette “equazioni orarie”. Se
le coordinate non fossero funzioni continue del tempo avremmo punti che occupano una
posizione e poi un’altra dopo un tempo infinitesimo, senza avere occupato le infinite
posizioni intermedie. Nell’antica Grecia, vari filosofi si posero il problema del moto: è in
sostanza possibile il moto, se un corpo puntiforme deve occupare infiniti punti tra due
posizioni A e B? Zenone di Elea1, in particolare, negava la possibilità del moto perché per
1
Zenone fa parte della scuola eleatica, fondata dal suo maestro Parmenide (515-450 AC).
Nacque nel 489 A.C ad Elea (Velia), oggi nel comune di Ascea (Sa) a circa 100 km a sud
5
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
arrivare da A a B a distanza finita d fra loro, il punto avrebbe dovuto percorrere prima d/2,
poi della restante lunghezza avrebbe percorso un’altra metà, poi della restante metà
un’altra metà, e così via... Insomma, avrebbe dovuto fare un percorso: d/2+d/4+d/8+…
Essendo questa una somma di infiniti termini, Zenone concludeva che la somma stessa
sarebbe stata infinita, raggiungendo la paradossale conclusione che il moto era impossibile
perché per andare da A a B, punti a distanza finita, in effetti il corpo doveva percorrere
+∞
una distanza infinita. Oggi naturalmente sappiamo che la serie:
∑2
1
n
converge a 1 e
1
pertanto la somma infinita proposta da Zenone converge a d, senza alcun paradosso. Nella
stessa vena, Zenone concludeva che in una corsa in cui avesse dato un vantaggio pari a d
ad una tartaruga, il pie’ veloce Achille non la avrebbe mai raggiunta. Infatti quando avesse
percorso il tratto d in un tempo t1 , la tartaruga sarebbe avanzata di una frazione di d ,
diciamo d / a , quando avesse percorso d / a in
t 2 , la tartaruga avrebbe compiuto un
2
ulteriore cammino d / a , ecc… Il tempo per raggiungere la tartaruga sarebbe stato
t = t1 + t 2 + ... Un tempo somma di infiniti termini (decrescenti), dunque infinito!
Le coordinate devono dunque essere continue e perciò derivabili rispetto a t. La derivata
prima delle coordinate di un punto materiale è detta velocità. Più precisamente avendo tre
coordinate cartesiane, possiamo definire tre velocità rispettivamente sui tre assi. L’insieme
dx
v x = dt
dy
delle tre derivate forma un vettore chiamato velocità: v = (v x , v y , v z ) = con: v y =
.
dt
dz
v z = dt
Chiaramente la velocità corrisponde alla nostra idea di rapidità del moto. Se un punto si
muove su una retta da A a B è interessante sapere quanto “rapidamente” si è mosso. Il
rapporto tra distanza AB ed il tempo impiegato per percorrerla darà il senso della rapidità
o velocità del punto. Questa è la velocità media. Tutti però sappiamo che nell’andare da A
a B la rapidità del moto può non essere costante. Questo chiaramente corrisponde alla
nostra esperienza quotidiana. Andare da A a B può implicare corse, fermate,
rallentamenti... Dunque la distanza tra A a B va divisa in tratti più brevi. Il rapporto tra
queste distanze più brevi ed il tempo impiegato a percorrerle, ci darà le velocità su questi
tratti che non saranno in genere uguali. Di conseguenza, vorremmo calcolare il rapporto
tra elementi di percorso sempre più brevi e tempi, anch’essi sempre più brevi, necessari a
percorrerli. Al limite, otterremo una derivata nel tempo, cioè una funzione continua del
di Salerno, una colonia della Magna Grecia di cui rimangono importanti resti d’epoca
greca. Dei suoi paradossi parla Platone nel Parmenide e Aristotele nella Fisica. Non sono
rimaste sue opere. Sui suoi quattro paradossi (quello presentato qui è detto paradosso della
dicotomia) contro il moto sono scorsi fiumi di inchiostro.
6
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
tempo che ad ogni istante, e perciò ad ogni punto spaziale, associa un numero (velocità
istantanea) che esprime la rapidità del moto in quel preciso punto temporale o spaziale.
Anche la velocità si esprime in funzione del tempo mediante delle equazioni orarie.
Se eseguiamo la stessa operazione con le coordinate polari, otteniamo due quantità con le
dρ
dimensioni di una lunghezza diviso un tempo: ρɺ =
ed un’altra con le dimensioni
dt
dθ
. La prima è detta velocità radiale e l’altra velocità
dell’inverso di un tempo: θɺ =
dt
angolare. Evidentemente la prima ci dà la velocità lungo la congiungente il punto con
l’origine, la seconda quanto rapidamente il punto gira intorno all’origine. Tuttavia, manca
ancora qualcosa. Se un punto si sposta in una direzione qualsiasi, esso avrà un moto che
può proiettarsi lungo ρ e lungo la perpendicolare a ρ. Questa ultima velocità avrà
direzione tangente alla traiettoria e sarà detta appunto velocità tangenziale: v t = ρθɺ che
ha tra l’altro le dimensioni di una velocità ([l]/[t]). Calcoliamo la velocità in coordinate
polari a cominciare dalla definizione di velocità e dalla relazione che lega le coordinate
cartesiane e quello polari:
y
x = ρ cos θ
y = ρsenθ
dθ
vt = ρ
dt
Y
dθ
Derivando
rispetto
tempo, si ha:
Q
vρ =
dρ
dt
θ
O
X
x
Fig. 12: Velocità radiale e tangenziale.
al
dx ɺ
ɺ
dt = ρ cos θ − ρθsenθ
dy = ρɺsenθ + ρθɺ cos θ
dt
Riscriviamo adesso la
velocità come vettore ed
otteniamo:
v=
dy
dx
i+
j=
dt
dt
= ( ρɺ cos θ − ρθɺsenθ )i + ( ρɺsenθ + ρθɺ cos θ ) j == ρɺ (cos θ i + senθj ) +
ρθɺ(−senθi + cos θj ) = ρɺk + ρθɺk
ρ
dove abbiamo posto:
t
k ρ = (cos θi + senθj )
k t = +(−senθi + cos θj )
che risultano essere due versori
( k ρ2 = k t2 = 1 ) perpendicolari fra loro ( k ρ ⋅ k t = 0 ), il primo dei quali ha la direzione del
7
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
raggio, col verso d’allontanamento dall’origine, mentre l’altro è perpendicolare al primo,
come mostrato in fig. 12. Le due componenti della velocità lungo questi due assi risultano
v ρ = ρɺ
allora:
come avevamo già indicato.
v t = ρθɺ
Dato un punto materiale in moto, sia P = P(t ) il vettore che ne indica la posizione ad
ogni istante. Il vettore differenza tra due valori di P presi a t e a t+dt, è pari a:
dP(t ) = dx(t )i + dy (t ) j + dz (t )k (si veda in fig. 13). La velocità è dunque:
dP
Y
P (t )
P(t + dt )
Traiettoria
X
Fig. 13: Traiettoria.
dy
dP dx
dz
v=
=
i+
j+ k
dt
dt
dt
dt
Un altro concetto importante è quello di traiettoria. Un corpo puntiforme in moto occuperà
un insieme di posizioni successive, che costituiscono una curva continua nello spazio,
detta appunto “traiettoria”.
La traiettoria si può ottenere dalle equazioni orarie eliminando il tempo. Facciamo un
paio di semplici esempi per illustrare il concetto. Assumiamo che le equazioni orarie di un
x = R cos ωt
corpo puntiforme siano:
, dove R è una costante con le dimensioni di una
y = Rsenωt
lunghezza e ω una costante con le dimensioni dell’inverso di un tempo. Allora, dividendo
per R, quadrando e sommando le due equazioni si ottiene: x 2 + y 2 = R 2 che è
evidentemente l’equazione di un cerchio.
8
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
Dunque la traiettoria è un cerchio. È facile vedere che ω è la velocità angolare del punto.
y
dθ
Infatti: tg (ωt ) = = tg (θ ) e dunque: θ = ωt ovvero:
= ω . Se invece le equazioni
x
dt
x = A cos ωt
orarie fossero state:
con due costanti A e B invece di una sola costante R,
y = Bsenωt
allora dividendo per A e B, quadrando e sommando si sarebbe ottenuto:
x2
A2
+
y2
B2
= 1 che
è l’equazione di un’ellisse. Dunque la traiettoria sarebbe stata un’ellisse.
5.
Accelerazione
Anche la velocità, ovvero le sue tre componenti, è funzione continua del tempo e
derivabile. Le derivate prime delle componenti della velocità formano così un nuovo
vettore chiamato accelerazione. L’accelerazione indica quanto rapidamente cambia la
dv y
dv
dv
d2y
d 2P d 2x
d 2z
j+ z k
velocità. Formalmente: a (t ) = 2 = 2 i + 2 j + 2 k = x i +
dt
dt
dt
dt
dt
dt
dt
Calcoliamo l’accelerazione in coordinate polari, partendo dalle componenti cartesiane
della velocità:
dx ɺ
ɺ
dt = ρ cos θ − ρθsenθ
dy = ρɺsenθ + ρθɺ cos θ
dt
Deriviamo di nuovo rispetto al tempo:
d 2 x
2
2 = ρɺɺ cos θ − ρɺθɺsenθ − ρɺθɺsenθ − ρθɺɺsenθ − ρθɺ cos θ
dt
2
d y = ρɺɺsenθ + ρɺθɺ cos θ + ρɺθɺ cos θ + ρθɺɺ cos θ − ρθɺ 2 senθ
2
dt
Raggruppiamo e scriviamo in forma vettoriale:
a (t ) =
d 2x
dt
2
i+
d2y
dt
2
j = ( ρɺɺ cos θ − 2 ρɺθɺsenθ − ρθɺɺsenθ − ρθɺ 2 cos θ )i
+ ( ρɺɺsenθ + 2 ρɺ θɺ cos θ + ρθɺɺ cos θ − ρθɺ 2 senθ ) j
Possiamo adesso raggruppare i termini, come abbiamo fatto nel caso delle velocità, in
modo da poter mettere in evidenza i due versori: k ρ e k t :
9
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
ɺ ɺ + ρθɺɺ)(−senθ i + cos θ j ) =
a (t ) = ( ρɺɺ − ρθɺ 2 )(cos θ i + senθ j ) + (2 ρθ
ɺ ɺ + ρθɺɺ)k
= ( ρɺɺ − ρθɺ2 ) k + (2 ρϑ
ρ
t
Come si vede abbiamo di nuovo due componenti: una radiale ed una tangenziale. La
componente radiale, in particolare, ha una derivata seconda del raggio, ma anche un
termine che fa sì che non sia nulla nemmeno nel caso in cui ρ rimane costante. Questo
termine a = − ρθɺ 2 k è normalmente chiamato “accelerazione centripeta”, nome che gli
ρ
c
deriva dal fatto che essa è diretta verso l’origine. Vedremo che questo termine risulta
essere rilevante nei moti circolari in cui il raggio resta costante.
E’ interessante notare come sia nel caso del calcolo della velocità che in quello
dell’accelerazione emerga un sistema di due versori (radiale e tangenziale) in modo affatto
naturale.
6.
Esempi di moto
Applichiamo adesso quanto si è detto ad alcuni semplici, ma utili casi.
1.
Cominciamo con il moto rettilineo uniforme. Il moto rettilineo uniforme è quello di
un punto materiale che si muove con velocità vettoriale costante, e dunque su di una
traiettoria rettilinea. Scegliamo per semplicità l’asse X coincidente con la direzione
dx
del movimento. Abbiamo allora:
= cost = v . Possiamo integrare questa equazione
dt
t
facilmente e ottenere l’equazione oraria: x(t ) =
dx
∫ dτ dτ = vt + x
0
. Evidentemente la
0
scelta dell’istante iniziale come tempo 0 è arbitraria e avremmo potuto integrare da un
generico t0 . In tal caso avremmo avuto: x(t)=v(t-t0)+x0.2
2
Nel caso del paradosso di Zenone su Achille e la tartaruga, avremmo per i tempi t1 ,
t 2 ... t1 =
d
d vT
d vT 2
d
, t2 =
, t3 =
( ) ... Sommando, si ha: t =
vA
vA vA
vA vA
vA
vT
∑ (v
i
)i .
A
v A è molto minore
v
d
d
d 1
d
di 1 , abbiamo: t =
(serie
( T )i =
(α ) i =
=
∑
∑
vA i vA
vA i
v A 1 − α v A − vT
Poiché il rapporto tra la velocità della tartaruga vT e quella di Achille
geometrica). Questa formula si poteva ottenere con un calcolo immediato. Questo
paradosso è legato strettamente a quello della dicotomia: esso dà la stessa serie per
α = 1/ 2.
10
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
2.
Nel caso del moto rettilineo uniformemente accelerato parliamo di un punto che si
muove su di una retta con un’accelerazione costante a. Abbiamo allora:
t
v (t ) =
∫ dτ
0
3.
d 2x
2
t
t
∫
∫
0
0
dτ + v 0 = adτ = at + v 0 ⇒ x (t ) =
t
dx
1
dτ = ( aτ + v0 )dτ == at 2 + v 0 t + x 0
dτ
2
∫
0
Un altro caso importante è quello del moto oscillatorio, cioè quello del moto di un
punto che oscilla tra due posizioni -x0 e x0. Per esempio, si potrà avere un’equazione
oraria del tipo: x (t ) = x 0 sin(ωt ) . Per t → +∞ , si avrà che la funzione seno oscilla tra
-1 e +1 e quindi x oscilla tra -x0 e +x0. Il numero di volte che il punto compie
un’oscillazione per unità di tempo si chiama “frequenza” ν ed il tempo che impiega a
1
compiere un’oscillazione si chiama “periodo” T . Risulta che: ν = . L’unità di
T
frequenza (un’oscillazione per secondo) è lo “Hertz”. Se proviamo a combinare due
moti “armonici” che avvengono l’uno lungo l’asse X e l’altro lungo l’asse Y, avremo
un moto nel piano che già abbiamo visto essere un’ellisse. In generale, si possono
considerare due moti sfasati tra loro, che danno moti risultanti più complicati (Figure
di Lissajous). Per “sfasati”, intendiamo che al tempo zero le due coordinate del punto
x = x 0 sen (ωt + α )
non sono 0 e 1, ovvero che le equazioni del moto sono del tipo:
y = y 0 cos(ωt + β )
L’introduzione dei due angoli di fase α e β , produce uno “sfasamento” α − β tra i
due moti. A seconda dello sfasamento il moto risultante sarà diverso. Per sfasamento
nullo si torna all’ellissi di prima. Questo è un caso particolare di composizione dei
moti, in cui un punto materiale soggetto a vari moti in direzioni diverse si muove con
un movimento complessivo che è la sovrapposizione dei singoli moti.
7.
La trasformazione galileiana
Abbiamo già trattato il caso di trasformazione di sistema di riferimento implicante una
traslazione o una rotazione dell’origine. Non abbiamo però trattato il caso di sistemi di
riferimento in moto l’uno rispetto all’altro. Il caso più semplice si ha quando un
riferimento S' si muove di moto rettilineo uniforme con velocità v rispetto ad un sistema S.
Prendiamo il semplice caso in cui gli assi dei due sistemi sono paralleli ed all’istante t=0
le due origini sono sovrapposte. Assumiamo pure che la velocità v sia diretta secondo
l’asse X. In questo caso, ad ogni istante le due origini saranno separate da una distanza
11
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
x0=vt. Pertanto le coordinate di S' saranno collegate a quelle di S dalla traslazione con
x' = x + x 0 = x + vt
l’origine a x0=vt. y ' = y
Trasformazione galileiana
z' = z
Questa relazione darà la coordinata x’ in S’ in funzione di x e del tempo. Però, la cosa da
notare è che, se deriviamo le tre relazioni rispetto al tempo,
otteniamo:
dx' dx
'
v x ' = dt = dt + v = v x + v
dy ' dy
'
=
= vy
v y ' =
dt
dt
dz ' dz
'
v z ' = dt = dt = v z
Come si vede, le componenti della velocità lungo Y e Z sono identiche nei due sistemi di
riferimento. Non è così per la componente della velocità lungo l’asse X: la velocità
misurata in S’ è maggiore della velocità misurata nel sistema S a causa della velocità
relativa dei due sistemi di riferimento. Questa trasformazione degli assi si chiama
“trasformazione galileiana”. Essa implica una semplice legge di addizione delle velocità
nell’andare da un sistema di riferimento ad un altro in moto rettilineo uniforme rispetto al
primo. Se eseguissimo una seconda derivazione rispetto al tempo, troveremmo però che
tutte e tre le componenti dell’accelerazione sono uguali nei due sistemi di riferimento.
Dunque in sistemi di riferimento in moto rettilineo l’uno rispetto all’altro, si misurano le
stesse accelerazioni. Non sarebbe così se S ed S’ fossero accelerati l’uno rispetto all’altro,
sia con accelerazione rettilinea che con accelerazioni dovute a moti circolari. Prendiamo il
caso in cui i due sistemi di riferimento sono accelerati uno rispetto all’altro lungo l’asse X:
1 2
x' = x + x 0 = x + 2 at
Queste tre relazioni implicano che:
y' = y
z' = z
'
dv x' ' dv x dv
=
+
= ax + a
a x ' =
dt
dt
dt
dv 'y ' dv y
=
= ay
derivando ulteriormente: a 'y ' =
dt
dt
'
dv '
dv
a z ' = z ' = z = a z
dt
dt
12
dx' dx
'
v x ' = dt = dt + v = v x + v
dy ' dy
'
=
= vy
v y ' =
dt
dt
dz ' dz
'
v z ' = dt = dt = v z
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
In conclusione: le accelerazioni sono le stesse, lungo gli assi Y e Z, ma lungo l’asse X
all’accelerazione nel sistema S occorre aggiungere l’accelerazione dell’origine o
“accelerazione di trascinamento”.
Vedremo che queste considerazioni sono molto importanti nello stabilire l’equivalenza dei
sistemi di riferimento dal punto di vista dinamico. Dal punto di vista della cinematica,
infatti, due sistemi diversi possono essere perfettamente equivalenti per descrivere il moto
di un punto materiale o di un sistema di punti materiali. Come vedremo però non c'è
l’equivalenza se consideriamo le leggi della dinamica. Facciamo un esempio. Tutti sanno
che il sistema oggi accettato per descrivere il sistema solare è quello eliocentrico.
“Eliocentrico” vuol dire che l’origine degli assi si pone nel Sole, dunque si considera il
Sole fermo. Si scelgono poi due assi ortogonali e con questi due assi ortogonali si
definisce la posizione della Terra. In questo caso è meglio utilizzare le coordinate polari
ρ, θ. Come si vedrà, il moto della Terra è un moto piano e dunque se ne può dare una
descrizione in un piano che è chiamato “eclittica”. Ci si può porre allora la domanda: si
può dare una descrizione del sistema Sole-Terra utilizzando un sistema geocentrico, cioè
con l’origine nella Terra e dunque considerando la Terra ferma? La risposta dal punto di
vista della cinematica è positiva. Ad ogni configurazione del sistema Sole-Terra in un
riferimento eliocentrico (coordinate nulle del Sole, ρΤ e θΤ per la Terra) corrisponde un
insieme di coordinate nel sistema geocentrico (coordinate nulle per la Terra e un ρS e θS
per il Sole). Le due descrizioni sono equivalenti perché è possibile trasformare
matematicamente le coordinate della Terra e del Sole dal sistema eliocentrico al sistema
geocentrico e viceversa. Si tratta dunque di una equivalenza matematica. La questione
però da porre è: sono i due sistemi dal punto di vista dinamico e dunque fisico
equivalenti? La risposta risulterà negativa. Qui occorre notare che il sistema copernicano e
quello tolemaico non erano dal punto di vista della cinematica equivalenti. Per esempio
nel sistema tolemaico la distanza di Marte dalla Terra (che si supponeva girasse in orbita
circolare intorno alla Terra) non variava, al contrario di quanto descritto nel sistema
copernicano. La variazione della distanza di un pianeta come Marte dalla Terra era
indicata dalla variazione della sua luminosità*. Anche se i due “massimi sistemi” fossero
stati i trasformati cinematici l’un dell’altro, essi non sarebbero stati dinamicamente
equivalenti. Ad una mentalità moderna apparirebbe immediatamente straordinario che una
massa gigantesca, come quella del Sole, potesse girare intorno alla Terra che ha una massa
enormemente più piccola! Il fatto che i sistemi di riferimento non siano equivalenti dal
punto di vista dinamico, implica che esiste un riferimento (o meglio una categoria di
riferimenti) come per esempio quello eliocentrico) nel quale le leggi della fisica valgono e
altri nei quali le leggi della dinamica non valgono. Il riferimento nel quale le leggi della
*
Per la verità, l’uso di epicicli poteva mettere in condizione di far variare tale distanza. Se
l’uso di epicicli avesse potuto condurre ad una descrizione esatta dei dati osservativi, il
sistema tolemaico sarebbe stato cinematicamente equivalente al sistema copernicano (si
vedano i problemi alla fine del Capitolo).
13
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
fisica valgono costituisce uno spazio assoluto, privilegiato dalle leggi della natura∗. In
realtà, se avessimo una formulazione delle leggi che valesse egualmente in ogni sistema di
riferimento, allora lo spazio assoluto scomparirebbe e tutti i sistemi di riferimento
sarebbero equivalenti. Il fatto è che, nella formulazione classica della dinamica, un
riferimento fermo rispetto alle stelle fisse è privilegiato assieme a tutti i sistemi in moto
rettilineo uniforme rispetto ad esso, perché non appaiono accelerazioni addizionali.
L’equivalenza di questi sistemi li definisce come una categoria di sistemi privilegiati dalla
dinamica. Tali sistemi sono detti “inerziali”. L’equivalenza dei sistemi inerziali è ciò che
si intende con la frase “relatività galileiana”. Riprenderemo il soggetto quando
discuteremo la dinamica.
Calcoliamo invece le regole di trasformazione delle velocità passando da un sistema ad un
altro in moto rotatorio intorno all’asse Z. Prendiamo le formule di trasformazione delle
coordinate per una rotazione degli assi e consideriamo l’angolo di rotazione funzione del
tempo:
x = x' cos α − y ' senα
y = x' senα + y ' cos α
Derivando rispetto al tempo, otteniamo:
v x = v' x ' cos α − x' αɺsenα − v' y ' senα − y ' αɺ cos α
v y = v' x ' senα + x' αɺ cos α + v' y ' cos α − y ' αɺsenα
Da cui si deduce, moltiplicando la prima per i e la seconda per j , che:
v = v '+(− x' αɺsenα − y ' αɺ cos α )i + ( x' αɺ cos α − y ' αɺsenα ) j =
= v '+αɺ ( x' (−senαi + cos αj ) − y ' (cos αi + senαj )) = v '+αɺ ( x' j '− y ' i ' ) ⇒
In conclusione otteniamo: v = v '+αɺρk t dove k t =
al raggio vettore ρ (il cui versore è: k ρ =
x'
ρ
x'
ρ
i '+
j '−
y'
ρ
y'
ρ
i ' è il versore perpendicolare
j ' ). Conviene esprimere questa
velocità anche come prodotto vettoriale tra un vettore di modulo ω = αɺ e direzione lungo
l’asse Z (versore k ) ed il raggio vettore ρ :
v = v '+ωk × ρ = v '+ω × ρ .
Dunque, anche in questo caso, per ottenere la velocità misurata in S’ occorre aggiungere
alla velocità misurata in S una velocità di trascinamento.
∗
“Lo spazio assoluto, considerato nella sua natura senza relazione a nulla di estraneo,
rimane sempre omogeneo ed immobile” I. Newton, Principi matematici della filosofia
naturale, con note di F. Enriques e U. Forti, Zanichelli 1994, p. 40.
14
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
Confrontiamo adesso le accelerazioni misurate nei due sistemi:
Deriviamo le componenti della velocità:
a x = a ' x ' cos α − v' x ' ωsenα − v' x ' ωsenα − x' ωɺ senα − x' ω 2 cos α − a ' y ' senα − v' y ' ω cos α −
− v' y ' ω cos α − y ' ωɺ cos α + y ' ω 2 senα
a y = a ' y ' senα + v' x ' ω cos α + v' x ' ω cos α + x' ωɺ cos α − x' ω 2 senα + a ' y ' cos α − v' y ' ωsenα −
− v ' y ' ωsenα − y ' ωɺ senα − y ' ω 2 cos α
Moltiplichiamo la prima per i e la seconda per j , sommiamo e raggruppiamo i termini,
tenendo di nuovo conto del fatto che: i ' = cos α i + senα j e j ' = −senα i + cos α j :
a = (a' x ' cos α − a' y ' senα )i + (a' x ' senα + a' y ' cos α ) j − ( x' ωɺ senα + y ' ωɺ cos α )i +
+ ( x' ωɺ cos α − y ' ωɺ senα ) j + (− x' ω 2 cos α + y ' ω 2 senα )i − ( x' ω 2 senα + y ' ω 2 cos α ) j −
− 2ω (v' x ' senα + v' y ' cos α )i + 2ω (v' x ' cos α − v' y ' senα ) j =
= a ' x ' (cos α i + senα j ) + a ' y ' (−senα i + cos α j ) + ωɺ x '(−senα i + cos α j ) −
− y ' ωɺ (cos α i + senα j ) − ω 2 x '(cos α i + senα j ) − y ' ω 2 (−senα i + cos α j ) +
+2ω v 'x ' (−senα i + cos α j ) − 2ω v ' y ' (cos α i + senα j ) =
= a' x ' i '+ a' y ' j '+ωɺ x' j '− y ' ωɺ i '−ω 2 ( x' i '+ y ' j ') + 2ωv' x ' j '−2ωv ' y ' i ' =
.
= a '+ ω× ρ '+ ω× ω× ρ '+ 2 ω× v '
Il termine a c = 2 ω × ν ′ è chiamato “accelerazione di G. Coriolis” (1792-1843).
8.
Velocità della luce, misure di Römer e di Bradley
Il primo tentativo di misura della velocità della luce risale a Galileo Galilei (1564-1642).
Il tentativo non ebbe successo a causa della tecnica utilizzata, troppo imprecisa per la
velocità altissima della luce•. La velocità della luce è universalmente indicata con il
simbolo c ed ha il valore di c=3.108m/s. Dopo la scoperta galileiana dei satelliti di Giove
(i pianeti “medicei”), Galilei stesso propose di usarne le eclissi per misurare la longitudine
di un luogo. In effetti, la differenza di longitudine tra due luoghi è proporzionale alla
differenza di tempo locale. Determinare in un luogo il mezzogiorno astronomico è facile
perché basta determinare l’istante in cui il Sole è alla massima altezza. L’altezza del Sole
•
Galileo Galilei, Discorsi e dimostrazioni matematiche su due nuove scienze. Primo
Giorno.
15
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
è facilmente determinabile con un sestante. Quello che però occorre determinare è lo
sfasamento temporale tra il mezzogiorno locale e quello del meridiano di riferimento (per
esempio Greenwich). Poiché il momento della scomparsa nella zona d’ombra di Giove di
uno dei satelliti è determinabile facilmente, per conoscere la longitudine di un posto
occorre avere semplicemente delle tavole che dicano a che ora avverrà la prossima eclisse
a Greenwich e paragonare il tempo locale di eclisse con quello di Greenwich. Misure di
questo genere furono eseguite da Masklyne per determinare la longitudine di Bridgetown
nelle Barbados.
Per questa ragione era importante determinare il periodo esatto di rivoluzione e molti
astronomi studiarono con attenzione il loro periodo. Il metodo proposto da Galilei (usare
le eclissi dei satelliti di Giove per determinare la longitudine) non fu mai usato dai
marinai, tuttavia fu usato per determinare le longitudini terrestri, specialmente per opera di
G. D. Cassini (1625-1712), astronomo italiano naturalizzato francese. Nel 1675
l’astronomo danese Olaus Römer (1644-1710) dell’osservatorio di Parigi, dove era stato
chiamato a lavorare da Luigi XIV∗∗, si accorse di un fatto curioso: l’oscuramento del
satellite Io da parte di Giove (periodo T=42 h 28’ 16“) non avveniva ad intervalli di tempo
esattamente uguali. Più precisamente, l’intervallo era più lungo quando la Terra, nel suo
moto di rivoluzione intorno al Sole, si allontanava da Giove e meno lungo quando si
avvicinava a Giove.
Guardando la fig. 14, si può capire perché. L’oscuramento di Io avviene quando l’ultimo
raggio di luce partito da Io raggiunge la Terra e cioè dopo un tempo t=d/c dopo che Io
risulta essere effettivamente nel cono d’ombra di Giove (d è la distanza di Io dalla Terra).
Io torna ad oscurarsi dopo un periodo di rivoluzione T più un tempo t’= d’/c, con d’
distanza della Terra da Io al momento della nuova scomparsa. Se d e d’ fossero uguali,
allora i due ritardi all’oscuramento sarebbero uguali e l’intervallo tra due oscuramenti
sarebbe esattamente il periodo. Però, poiché durante un periodo T la Terra si sposta ad
una velocità approssimativa vT = 30km / s (cfr. con la velocità di un proiettile d’artiglieria
di ≈ 1km / s ), si avrà il ritardo: ∆t =
d ' − d T ⋅ vT
≤
= 15" facilmente misurabile oggi, ma
c
c
non all’epoca di Römer.
∗∗
A testimonianza dell’aiuto dato da Luigi XIV allo sviluppo delle scienze, riportiamo
quanto dice Voltaire in una lettera al Guardasigilli inglese Harvey (1740). “... Louis XIV
songeait à tous... la physique et l’étude de l’antiquité attirèrant son attention… il farait
elever l’Observatoire, et tracer un méridienne d’un bout à l’autre du royame, ouvrage
unique dans le mond... il envoyait des géometrès e des phycisiens au fond de l’Afrique e
de l’Amerique chercer des nouvelles conaissences. Songez, milord, que sans le voyage e
les experiences de ceux qu’ilenvoye à Cayenne, en 1672, et sans le mesure de M. Picard,
jamais Newton n’eùt fait ses découvetres sur l’attraction. Regardez, je vous prie, un
Cassini, un Huygens que renoncent tous deux à leur patrie qu’ils honorent, pour venire en
France jouir de l’estime e des bienfait de Louis XIV…”
16
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
Io
Fig. 14: Eclisse del satellite di Giove.
Giove
d'
d
Terra
Il primo orologio a pendolo, cioè basato sull’isocronismo delle piccole oscillazioni
(scoperto da G. Galilei), fu costruito da C. Huygens nel 1657∗.
Cronometri marini a bilanciere, capaci di un errore di pochi secondi al giorno non furono
costruiti fino al 1735 da J. Harrison (1693-1776). In verità, quello che è rilevante è
l’allontanamento della Terra nella direzione del raggio di luce o approssimativamente
lungo un diametro dell’orbita terrestre. A ciascun oscuramento si misura il tempo che la
luce impiega a percorrere lo spostamento effettuato dalla Terra durante un periodo, come
viene mostrato in fig. 15, dove i raggi provenienti da Io sono indicati come
approssimativamente paralleli, data la grande distanza che separa la Terra da Io.
In effetti, la durata misurata ti di ogni periodo (in totale N oscuramenti ad ogni periodo di
∆d i
6 mesi) è uguale a: t i = T ±
. Sommando i valori ti per i sei mesi in cui la Terra si
c
avvicina (segno -) e poi si allontana (segno +) si può ottenere il valore vero del periodo T
(
t i = NT ). Sommando i valori di ti per i tre mesi3, durante i quali la Terra si avvicina
∑
i
NT 1
NT RTS
+ ∑ i ∆d i =
+
2
c
2
c
6
= raggio dell’orbita terrestre = 150 ⋅ 10 km . Il raggio RTS dell’orbita
a Giove e Giove è visibile, si ha: Ttot =
dove
R
TS
∑ i ti =
∗
Nel suo libro, The history of Clocks & watches, pag. 68, Eric Bruton scrive a proposito
dell'introduzione del pendolo nella fabbricazione degli orologi: “…he was the celebrated
Dutch astronomer and physicist Christiaan Huygens (1629-1693), who invented the
pendulum clock in about 1657…At last here was a clock that could be made relatively
easily and, in its most accurate versions, with weight drive and long pendulum, would
keep time to seconds a day. The astronomers were the main beneficiaries.”
3
Si noti che, in tre mesi, Giove, che compie una rivoluzione attorno al Sole in circa 12
anni, si sarà spostato di solo circa 8° .
17
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
terrestre era già noto, anche se approssimativamente, da tempo. Poiché τ=Ttot -NT=
16’22”, la velocità della luce risultò: c = 3 ⋅ 108 km / 986 s ≈ 3, 07 ⋅ 105 km / s 4.
Fig. 15: Luce riflessa da Io.
Luce riflessa da Io
appena prima di
entrare nell'ombra
di Giove
d-d'
Un’altra misura, anch’essa astronomica, fu fatta da J. Bradley (1693-1762) direttore
dell’osservatorio di Greenwich. In effetti, Bradley scoprì nel 1728 l’aberrazione
astronomica, che fu anche la prima dimostrazione del moto della Terra, dimostrazione
cercata a lungo da Galilei. Se si guarda alla posizione angolare di una stella, questa
sembra percorrere, durante il corso dell’anno, un’ellisse. La posizione rilevata di una
stella è, in effetti, spostata dalla posizione vera a causa dello spostamento della Terra di un
piccolo angolo: α ≅ tgα ≅ 10 −4 (fig. 16).
La spiegazione classica, cioè non relativistica, si ottiene dicendo che la velocità della luce
nel riferimento delle stelle è c, che deve essere composta con la velocità della Terra
vT ∗.
vT
= 10 − 4 appunto, nel caso in cui il moto della Terra sia
c
perpendicolare alla direzione di provenienza della luce∗∗. Naturalmente, questo implica
Si ottiene allora: α ≅ tgα =
4
Il valore è riportato in F. Arago, Lezioni di Astronomia, tradotto da E. Capocci e
pubblicato da Stamperia dell’Iride, Napoli 1851.
∗
Un esempio divertente degli effetti della composizione delle velocità è quello di un
uomo che cammina velocemente sotto la pioggia: se non tiene l’ombrello inclinato in
avanti, la pioggia gli bagnerà la faccia!
∗∗
Un’altra dimostrazione del moto della Terra fu quella data da Domenico Guglielmini
(1655–1710) a Bologna. La dimostrazione di Guglielmini fu eseguita dalla torre degli
Asinelli. Lasciando cadere un corpo dalla cima della torre, ci si aspetterebbe che il corpo
colpisca il suolo esattamente ai piedi della verticale del punto dove è stato lasciato cadere.
Non è così perché, ruotando la Terra, il grave ha una componente della velocità
18
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
che la velocità della luce nel riferimento della Terra sia maggiore di c: si avrebbe infatti
una velocità della luce finale di c + vT . Su questo punto, vogliamo fare alcuni
2
2
commenti.
Luce dalla stella
c
α
Fig. 16: Posizione misurata di una stella.
Telescopio
vT
•
La misura della velocità della luce effettuata da A. A. Michelson (1852-1931)
molto tempo più tardi, dimostrerà che la velocità è pari a c in ogni sistema di
riferimento. Questo risultato, che è in aperta violazione della relatività galileiana,
è il fondamento sperimentale della Relatività Ristretta (A. Einstein, 1905).
•
L’aberrazione della luce non è da confondere con la parallasse stellare.
Naturalmente la parallasse stellare non è misurabile per molte stelle data la loro
enorme distanza. Per quelle più vicine, la parallasse è un metodo di misura della
distanza della stella e risulta pure in uno spostamento della posizione della stella
durante l’anno a causa del movimento della Terra. La parallasse ci fa misurare la
posizione di una stella spostata dalla sua posizione reale a causa del fatto che il
diametro dell’orbita terrestre è non nullo. In effetti, l’opposizione al sistema
copernicano traeva anche forza dal fatto che la parallasse è molto piccola o nulla per
molte stelle ed, in pratica, all’epoca di Copernico non risultava misurabile per alcuna
stella. L’esistenza della parallasse dunque dimostra che la Terra assume posizioni
diverse intorno al Sole durante l’anno: si tratta in effetti di un fenomeno legato alla
posizione della Terra e non alla sua velocità.
La fig. 17 può aiutare a comprendere tale effetto. Se prendiamo una stella ad una
distanza di un anno luce dalla Terra, cioè ad una distanza tale che la sua luce
tangenziale alla Terra più grande di quella del piede della verticale perché il raggio, cioè
la sua distanza dal centro della Terra, è più lungo. Di conseguenza esso si muoverà verso
est più rapidamente del piede della verticale e cadrà ad est di quest’ultimo.
19
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
impieghi un anno a raggiungere la Terra (1 anno-luce è uguale a 9,46.1015m),
l’angolo di parallasse sarà dato dal raggio dell’orbita terrestre (1,5.1011m) diviso
per la distanza della stella, dunque:
Angolo di parallasse θ
Fig. 17: Parallasse stellare.
1,5 ⋅1011
θ=
= 1,58 ⋅10 −5 rad = 9 ⋅10 − 4 gradi = 0 0 0'3,26" . Detto per inciso, la stella
9,46 ⋅1015
più vicina alla Terra è Proxima Centauri a 4,3 anni-luce, dal che si vede che gli angoli
di parallasse sono molto piccoli: nessuna meraviglia che gli antichi non riuscissero a
misurarli*! Viceversa, misurando l’angolo di parallasse, si può calcolare la distanza di
una stella. Dunque la misura della parallasse è anche una misura della distanza di una
stella. Un’unità di distanza in astronomia è il parallasse-secondo (pc), la distanza di
una stella che ha un angolo di parallasse di un secondo:
1" = (1 / 3600) gradi = π /(180 ⋅ 3600)rad = 4,84 ⋅10 −6 rad =
1,5 ⋅1011 m
1pc
da cui 1 pc = 3,09 1016m∗∗.
*
Il primo a misurare la parallasse stellare fu F. W. Bessel (1838).
∗∗
Per misurare la distanza di galassie assai lontane (centinaia di anni-luce), per le quali il
metodo della parallasse non funziona più, E. Hubble nel 1920 usò il metodo delle Cefeidi,
messo a punto da Henrietta Levitt (circa 1912). Le Cefeidi sono delle stelle variabili, cioè
stelle la cui luminosità varia con un periodo di pochi giorni. Risulta che il periodo è
correlato con la luminosità assoluta delle stelle, per cui una volta misurato il periodo se ne
conosce la luminosità assoluta e dalla luminosità apparente (misurata) si deduce la
distanza della stella. Il metodo funziona fino a distanze dell’ordine dei 10-100 milioni di
anni-luce.
20
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
Per molto tempo, si è ritenuto che esistesse un mezzo che riempiva il vuoto e costituiva il
supporto le cui vibrazioni erano la luce. Il mezzo era chiamato “etere” (αεθηρ )∗∗∗.
La velocità della luce c, il cui valore viene predetto naturalmente dalla teoria
elettromagnetica, come vedremo più avanti, si riteneva fosse il valore della velocità della
luce nell’etere. Da questo punto di vista la spiegazione dell’aberrazione della luce stellare
era perfettamente naturale, in quanto conduce ad avere sulla Terra una velocità della luce
maggiore di c.
Parallasse
Aberrazione
θ
α
Telescopio
vT
Fig. 18: Parallasse ed aberrazione.
Questa spiegazione tuttavia entrerà in contraddizione con l’esperimento di Michelson.
Un’ipotesi che fu avanzata per spiegare il risultato di Michelson fu quella di immaginare
che la Terra trascinasse l’etere con sé e che quindi la velocità misurata sulla Terra fosse
comunque pari a c. In tal caso tuttavia, non si sarebbe dovuto osservare il fenomeno
dell’aberrazione. Dunque l’aberrazione della luce dimostrò che l’ipotesi di trascinamento
dell’etere non era giusta. Un’altra ipotesi, fatta da Ritz, fu che la velocità c fosse la
velocità della luce rispetto alla sorgente, ma questo implicherebbe una differenza di
velocità tra la luce emessa da stelle che si avvicinano e stelle che si allontanano dalla
Terra. Nessun effetto del genere fu trovato.
Di conseguenza, l’idea dell'esistenza
dell’etere fu scartata.
***
Dice J.C. Maxwell in un rapporto alla Royal Physical Society: “Per quante difficoltà si
possano incontrare nella formulazione di una valida teoria della struttura dell’etere, non vi
possono essere dubbi che gli spazi interplanetari e interstellari non sono vuoti, ma sono
occupati da una sostanza materiale che è certamente il corpo più esteso che si conosca.”.
Da A. Einstein, La relatività: esposizione divulgativa, Bollati Boringhieri editori.
21
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
La velocità della luce può essere misurata inviando un fascio di luce ben collimato ad una
distanza d dove incontra uno specchio che la rinvia alla sorgente. Occorre a questo punto
misurare il tempo t di andata e ritorno del fascio di luce e la velocità misurata della luce
sarà c=2d/t. Quello che rende difficile la misura naturalmente è il tempo brevissimo che la
luce impiega ad andare e tornare per qualunque ragionevole base di misura d. All’epoca in
cui per la prima volta è stata effettuata una misura di questo tipo, la base non poteva
essere allungata senza limiti a causa della limitata collimazione e potenza dei fasci (oggi si
possono usare i laser). Per una base di qualche km occorre misurare tempi dell’ordine di
pochi microsecondi: una misura difficilissima per quei tempi. Un primo metodo di misura
fu ideato da Fizeau (1849), ed utilizzava una ruota dentata con 720 denti. Il fascio
proveniente dalla sorgente passava in andata nella cava (spazio vuoto) fra i denti di una
ruota dentata (fig. 19). Al ritorno, esso poteva intercettare un dente se la ruota girava
abbastanza in fretta, e quindi non passare. Nel caso in cui il fascio di ritorno fosse
scomparso del tutto se ne poteva dedurre che il tempo impiegato dalla luce per fare il
doppio tragitto fosse pari al tempo di rotazione della ruota di un angolo pari al passo della
ruota dentata. La rotazione era di 25 giri/s perché la luce riapparisse nella cava
successiva.
Sorgente
Montmartre
specchio
Suresnes
Ruota dentata
8633 m
Fascio di luce
Fig. 19: Dispositivo sperimentale di Fizeau.
Un altro metodo di misura faceva uso di uno specchio rotante (Foucault, 1862). Il tempo
di andata e ritorno della luce veniva misurato dall'angolo di rotazione di uno specchio
rotante a 1000 − 1500 giri / s su una base di 20m . Su una base così corta è possibile
frapporre sul camino della luce un mezzo materiale, per esempio acqua, e misurare le
velocità nel mezzo materiale. Una seconda versione del metodo di Foucault, facente uso
di specchi sulle facce di un prisma ottagonale rotante sul suo asse, fu inventata da
Michelson e usata per misurare c su una base di 35km collo specchio rotante a
530 giri / s . In questo caso non si misura l’angolo di rotazione, ma si misura il tempo in
cui una faccia del prisma sostituisce la seguente. Naturalmente, una volta nota la velocità
della luce, si può usare tale conoscenza per la misura di lunghezze. Ad esempio, la
22
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
distanza Terra-Luna è oggi nota con grande precisione (3cm) perché un sistema di cento
riflettori lasciati sulla superficie lunare dalle missioni spaziali Apollo 11 e 14 riflette la
luce di un laser che invia impulsi da Terra. Misurando il tempo di andata e ritorno di
questi impulsi (2,6s), si può conoscere la distanza Terra-Luna (384000km in media) molto
accuratamente, sia pure con molta fatica (solo una frazione pari a 10 −21 della luce
incidente può essere rivelata di ritorno). Un altro modo di misurare una distanza fa uso del
paragone diretto dei tempi di andata e ritorno della luce lungo due cammini, dei quali uno
è una lunghezza campione. Immaginiamo di avere un fascio di luce che viene diviso in
due da uno specchio semitrasparente. I due fasci così ottenuti proseguono lungo cammini
perpendicolari. Uno ha una lunghezza molto ben misurata. Per esempio potrebbe essere il
metro campione o una sua copia. Misurando la differenza dei tempi di arrivo dei due fasci,
si otterrà un confronto diretto di una lunghezza incognita con un metro campione*. Il
paragone in realtà viene fatto confrontando non i tempi di andata e ritorno, ma piuttosto le
fasi delle due onde: questo verrà spiegato meglio nel capitolo dedicato all’ottica ed, in
particolare, all’interferenza. Poiché lo strumento mostrato in fig. 20 si basa sul fenomeno
dell’interferenza delle onde luminose, viene chiamato interferometro. La versione
mostrata è detta “interferometro di Michelson”, dal nome dell’inventore.
Nell’interferometro di Michelson, il fascio di luce che parte dalla sorgente S viene diviso
in due dalla superficie semiriflettente della lamina S1. La lamina S2 serve ad eguagliare i
due cammini. In effetti il fascio inviato lungo d1, e poi riflesso indietro dallo specchio,
passa attraverso la lamina S1 tre volte, mentre il fascio che percorre d2, passa attraverso S1
una sola volta. Poiché la velocità della luce nel vetro è inferiore a quella nell’aria, la
lamina S2 eguaglia i percorsi nel vetro e dunque i tempi di percorrenza totali. La cosa
interessante che possiamo notare è che, stando sulla Terra, l’interferometro si muove alla
velocità di 30 km/s in un sistema di riferimento diverso da quello dell’etere (vedi
considerazioni precedenti sull’aberrazione astronomica). Supponiamo di allineare uno dei
bracci dell’interferometro con la velocità orbitale vT della Terra, e misuriamo la differenza
dei tempi di andata e ritorno lungo i due bracci di lunghezza d 1 e d2. Successivamente
facciamo la stessa misura invertendo la posizione dei due bracci.
Esaminiamo adesso quello che ci si aspetta secondo la relatività galileiana.
1.
Il braccio di lunghezza d 1 è orientato lungo la velocità della Terra. Il tempo di andata
e ritorno lungo d 1 sarà dato dal rapporto delle distanze percorse diviso per le
velocità. All’andata la velocità è diminuita di vT : c − vT e al ritorno sarà aumentata di
d1
d1
vT : c + vT . I due tempi saranno allora: t a =
e tr =
e il tempo totale
c + vT
c − vT
*
In questo modo Michelson misurò direttamente la lunghezza del metro campione in
36
termini della lunghezza d’onda λ di una riga specifica dell’atomo di 86
Kr , trovando: 1 m
= 1.650.763,73 volte λ, che divenne la nuova definizione di metro. Dal 1983, 1m=spazio
percorso dalla luce in (1/299.792.458) secondi.
23
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
sarà:
t = ta + t r =
2d1 1
2d
= 1γ2
2
c 1− β
c
β=
con
vT
c
e
γ =
1
1− β 2
.
Possiamo rifare il calcolo nel riferimento dell’etere, dicendo che la velocità della luce
è c, ma lo specchio a destra si muove (allontanandosi) in modo che si ha:
ct a = d1 + vT t a e, al ritorno si muove S1, e si ha: ct r = d1 − vT t r . Si ottiene così lo
stesso risultato, in accordo con l’universalità del tempo.
2.
Sull’altro braccio il tempo totale di andata e ritorno sarà t 2 = 2γ d 2 / c 5. Il fattore
γ viene dal fatto che, nel riferimento dell’etere, lo specchio si muove costringendo la
luce ad un cammino triangolare di lunghezza
2 d 22 + (v T
t2 2
) = ct 2 . Nel
2
c 2 − vT2 .
riferimento terrestre la velocità non è c, ma
Specchio
d2
vT
Specchio
semiriflettente
S
Specchio
d1
Fascio di luce
S1
S2
Fig. 20: Interferometro di Michelson.
3.
La differenza dei due tempi sarà dunque:
(γ
∆t =
2
2
γ (d1γ − d 2 ) ≅ (d1γ − d 2 )
c
c
≅ 1 ). Chiaramente scambiando la posizione dei due bracci (d2 lungo la velocità
2
2
γ (γ d 2 − d1 ) ≅ (d 2γ − d1 ) .
c
c
Se tuttavia la velocità della luce è c in ogni sistema di riferimento, in violazione della
della Terra) la differenza dei tempi sarà diversa: ∆t ' =
5
Si noti che si sta dicendo che, sulla Terra, la velocità della luce dipende dalla direzione.
24
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
relatività galileiana, allora la differenza dei due tempi è: ∆t =
∆t ' =
4.
2
( d 2 − d1 ) e
c
2
( d − d1 ) , cioè: ∆t − ∆t ' = 0 6.
c 2
La differenza dei tempi secondo la relatività galileiana può essere riscritta (qui
abbiamo preso i due intervalli in valore assoluto, perché il sistema non misura quale
dei raggi - direzione della velocità o perpendicolare- arriva prima, solo la differenza
di tempo): ∆t =
2
2
2
1
β2
(d1γ − d 2 ) ≅ (d1 (1 +
) − d 2 ) = ( d1 − d 2 ) + d1 β 2 e
c
c
2
c
c
d β2
2
1
( d 2 − d1 ) − 2
e ∆t − ∆t ' = (d1 + d 2 ) β 2 (abbiamo assunto che
c
c
c
d1 > d 2 ). Il che dà un termine correttivo in β 2 = 10 −8 .
∆t ' =
5.
I risultati sperimentali dicono che questo termine correttivo sul tempo non c’è o, in
altre parole, la differenza dei due tempi è la stessa indipendentemente
dall’orientazione dei bracci, in violazione della fisica classica: l’ipotesi dell’esistenza
dell’etere deve pertanto essere abbandonata7.
9.
La trasformazione di Lorentz
Se la velocità della luce rimane la stessa in sistemi in moto rettilineo uniforme l'uno
rispetto all'altro, la trasformazione galileiana va sostituita con un’altra trasformazione
chiamata “trasformazione di Lorentz”. Possiamo ottenerla usando i risultati di esperimenti
ideali, che ricalcano quanto fatto con l’interferometro di Michelson. Riprendiamo dunque
l’esperimento di Michelson ed esaminiamolo alla luce dell’ipotesi che la velocità della
luce sia effettivamente la stessa in ogni sistema di riferimento inerziale. Paragoniamo i
risultati ottenuti nel riferimento proprio dell’interferometro ( Σ ' ), a quelli ottenuti in uno
( Σ ) rispetto al quale l’interferometro si muove di moto rettilineo uniforme. L’istante
t = 0 è scelto come l’istante in cui le due origini coincidono.
Se nelle formule precedenti poniamo: d 2 = d1 = d , nel riferimento dell’
interferometro, e assumiamo che il braccio che si muove lungo la direzione di vT si
6
accorci di un fattore
1 − β 2 nel riferimento dell’etere, allora avremo che in entrambi i
casi ∆t = 0 . L’ipotesi che esista tale contrazione, che spiegherebbe il risultato negativo
dell’esperimento di Michelson, fu fatta da Lorentz e l’effetto è appunto chiamato
“contrazione di Lorentz”.
7
Qui per etere occorre considerare il mezzo in cui si sarebbe propagata la luce. Un etere
ed un riferimento assoluto potrebbero esistere, ma non in relazione alla luce.
25
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
Postuliamo anche che i riferimenti sono equivalenti fra loro. Cominciamo col dire che
due regoli rigidi, uguali quando a riposo l’uno rispetto all’altro, dovranno essere uguali
secondo gli osservatori in Σ e in Σ ' , se disposti secondo l’asse Y , altrimenti uno dei due
sistemi non è equivalente all’altro.
Cominciamo a paragonare i tempi che la luce impiega per andare e tornare lungo il
braccio dell’interferometro perpendicolare al moto della Terra (assi YeY ' ). Nel
2y'
riferimento proprio, il tempo sarà: t ' =
. Nel riferimento Σ , la velocità della luce è
c
ancora c, ma la luce deve colpire lo specchio ed essere riflessa e perché ciò avvenga
occorre che la luce si muova lungo un cammino obliquo (l’ipotenusa di un triangolo i cui
cateti sono il braccio y ( d 2 nella figura precedente) e la distanza percorsa da Σ ' lungo
X). Dunque: ( cta )2 = y 2 + ( vta )2 . La stessa formula si può applicare per il cammino di
ritorno; dunque, il tempo totale sarà: t =
2y
c 1− β 2
. Utilizzando la relazione trovata
2y'
= t ' , otteniamo la relazione tra il tempo proprio t e quello t' di un
c
t'
1
sistema inerziale diverso: t =
. Il fattore: γ =
è ovviamente maggiore
2
1− β 2
1− β
precedentemente:
di 1 se β non è nullo e dunque t è sempre maggiore di t’. In conclusione: il tempo non è
universale, ma dipende dallo stato di moto del sistema in cui lo misuriamo. Il tempo
proprio (cioè misurato nel sistema di riferimento solidale al nostro regolo) è il più breve
possibile. Vedremo fra poco una dimostrazione sperimentale di questo fatto. Notiamo
anche che, se β è praticamente zero, anche la dilatazione dei tempi si annulla: lim t ' = t .
β →0
Dunque la fisica classica, per la quale t è indipendente dal moto del sistema di riferimento,
è il limite della fisica relativistica per velocità relative dei sistemi piccole rispetto alla
velocità della luce. Chiamiamo tempo “proprio” il tempo misurato da un osservatore con
un orologio fisso in un punto di un riferimento, per esempio da un osservatore che misura
i tempi di andata e ritorno nell’esperimento di Michelson lungo i due bracci, standosene
nell’origine di Σ ' . Ebbene, possiamo concludere che il tempo proprio è sempre più breve
dello stesso intervallo di tempo misurato in un altro sistema.
Adesso guardiamo quello che succede nella direzione dell’asse lungo il quale si svolge il
moto (braccio d1 nella figura dell’interferometro). Il tempo di andata e ritorno nel sistema
non proprio sarà: ct = x + vT t per l’andata e ct = x − vT t per il ritorno. In totale:
t=
è
26
x
x
2x
2x 2
+
=
=
γ . Nel sistema proprio il tempo di andata e ritorno
c − vT c + vT c(1 − β 2 )
c
2x '
semplicemente: t ' =
. Usando la relazione trovata tra t e t':
c
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
2x 2
2x '
γ = t = γ t' = γ
⇒ xγ = x ' . Nel derivare questa formula abbiamo sostituito a
c
c
d1 (come precedentemente avevamo sostituito y a d1 ) la quantità x’, coordinata dello
specchio nel sistema proprio, ed abbiamo introdotto la coordinata x ( y ) nel sistema in
moto. La conclusione è che le lunghezze dei regoli rigidi non rimangono le stesse quando
i regoli sono nella direzione del moto, ma a differenza di prima le lunghezze proprie sono
le più lunghe.
Per ottenere le formule di trasformazione delle coordinate da un sistema di riferimento ad
un altro occorre però ancora discutere della sincronizzazione degli orologi. Se lo
sperimentatore in Σ ' misura un intervallo di tempo ∆t proprio, lo stesso intervallo di
tempo viene misurato nell’altro riferimento con l’ausilio di due orologi, Occorre avere in
Σ una serie di orologi sincronizzati.
Vediamo come si sincronizzano gli orologi in Σ e come vede questa operazione lo
sperimentatore in Σ ' . Mettiamo al centro tra i due orologi in Σ una sorgente che invia un
lampo di luce ai due orologi. Facciamo partire entrambi gli orologi al momento in cui
ricevono il lampo di luce. Per un osservatore in Σ i due orologi sono così sincronizzati,
perché la velocità della luce è la stessa in entrambe le direzioni e la sorgente è posta al
centro tra i due orologi. Ma lo sperimentatore in Σ ' non è d'accordo. Infatti, un orologio
in Σ si muove verso il raggio luminoso e l’altro se ne allontana.
Dunque gli orologi saranno fuori sincronia di: δ t =
β
xγ 2 =
β
x ' γ . Questa formula si
c
c
ottiene calcolando i due tempi di arrivo, t1 e t 2 , dei raggi luminosi agli orologi fermi in
Σ , secondo l’osservatore in Σ ' (come al solito si utilizzano le due identità : ct1 =
x
+ vt1
2
x
− vt 2 , facendone la differenza). Con x abbiamo indicato la distanza tra gli
2
orologi in Σ , con il primo orologio posizionato nell’origine ed essendo le origini dei due
sistemi, Σ ' e Σ , sovrapposte all’istante iniziale.
e ct 2 =
Per trovare la relazione tra le coordinate x e x', basta a questo punto notare che:
x = vt + x ' / γ ovvero che la coordinata x è uguale alla posizione dell’origine dell’altro
riferimento (vt) in S più x' ridotta del fattore 1/γ a causa della contrazione di Lorentz.
Estraendo x', si ottiene: x ' = γ ( x − vt )
Calcoliamo ora la relazione tra le misure dei tempi effettuate nei due sistemi.
Per calcolare il tempo t e paragonarlo a t', diciamo che t è uguale all’intervallo proprio t'
moltiplicato per il fattore di Lorentz γ , più l’errore di sincronizzazione. In formula:
t = t ' γ + δt = γt '+
β
c
γx' = γ (t '+
β
c
x ' ) . da cui:
27
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
t'=
1
γ
t−
β
c
x' =
1
γ
t−
β
1 β
1
β
β
β
γ ( x − vt ) ⇒ t ' = ( + γ v )t − γ x = γ ( 2 + β 2 )t − γ x = γ ( t − x )
c
c
c
c
γ c
γ
In conclusione, la trasformazione di Lorentz è:
x ' = γ ( x − β ct )
y = y'
'
z = z '
t ' = γ (t − β x)
c
x = γ ( x '+ β ct ')
y = y'
'
z = z '
t = γ (t '+ β x ')
c
Dove si vede bene che per v → 0 (ovvero, β → 0 e γ → 1 ), essa si riduce alla
trasformazione galileiana:
x = x '+vt
y = y'
z = z'
t = t '
Poiché è evidente che il tempo va trasformato come le coordinate spaziali, possiamo
prendere come quarta coordinata ct invece di t, in modo da avere quattro coordinate con le
dimensioni di una lunghezza. Possiamo anche porre:
x1 = x
x2 = y
e riscrivere la trasformazione così:
x3 = z
x 4 = ct
x1' = γ ( x1 + βx 4 )
x 2' = x 2
'
x3 = x3
'
x 4 = γ ( x 4 + βx1 )
Si può anche invertire la trasformazione. Dalla quarta si ha: x 4 =
nella prima: x1' = γx1 + βγ (
x 4'
γ
x 4'
γ
− βx1 e sostituendo
− βx1 ) ⇒ x1' − βx 4' = γ (1 − β 2 ) x1 ⇒ x1 = γ ( x1' − βx 4' ) .
Come si vede la stessa relazione, ma col segno di β, cioè della velocità cambiato.
Egualmente si ottiene facilmente, sostituendo x1 nella quarta: x 4 = γ ( x 4' − βx1' ) .
10. Trasformazione delle velocità
28
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
Possiamo cercare adesso di trovare le formule di trasformazione delle velocità da un
sistema all’altro, per assicurarci che anche queste si riducano a quelle galileiane nel caso
di velocità trascurabili rispetto a quella della luce e anche per verificare che nessuna
velocità possa superare quella della luce ovvero che la velocità della luce si trasformi in sé
stessa.
dx '
+ βc
v' + β c
dx γ (dx '+ β cdt ') dt '
vx =
=
=
= x
dt γ (dt '+ β dx ') 1 + β dx ' 1 + β v '
x
c
c dt '
c
dy '
dt '
v 'y
dy
dy '
vy =
=
=
=
dt γ (dt '+ β dx ') γ (1 + β v ' ) γ (1 + β v ' )
x
x
c
c
c
'
Supponiamo che la velocità sia proprio c in S' lungo l’asse X, sostituiamo c a vx e
vediamo subito che
v x è allora uguale a c. Naturalmente in questo caso v 'y = 0 e quindi
v y = 0 . Se la velocità è c, ma lungo l’asse Y', allora: vx = 0 e v x = v . D'altra parte:
'
vy =
c
γ
. La velocità in modulo è però c. Infatti:
v x2 + v y2 = v 2 +
c2
γ
2
= v 2 + (1 − β 2 )c 2 = v 2 + c 2 − β 2 c 2 = c 2
In effetti possiamo utilizzare queste formule per spiegare l’aberrazione astronomica.
Diciamo che la luce della stella arriva lungo l’asse Y' di un sistema fisso con la stella. La
Terra si muove lungo l’asse X' (fig. 21). La luce ha dunque come componente della
velocità solo quella lungo Y' nel sistema della stella e le due componenti in X e Y nel
sistema della Terra saranno allora quelle appena calcolate. La direzione della luce vista
v
v
v
sulla Terra sarà data da: x = γ ≅ dove v è la velocità relativa dei due sistemi, quella
vy c
c
cioè della Terra nel moto orbitale, e γ è praticamente pari ad 1, giacché β =10-4. In questo
modo otteniamo la stessa formula già calcolata, ma il metodo adesso è concettualmente
'2
'2
2
2
2
corretto. Più in generale, se: vx + v y = c allora anche v 2
x + v y = c . Infatti:
v 2x + v y2 =
(vx' + β c) 2
(1 +
β
c
' 2
x
v)
+
v '2y
γ (1 +
2
β
c
=
' 2
x
v )
(vx' + β c) 2 + v '2y (1 − β 2 )
(1 +
β
c
=
' 2
x
v)
29
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
c +β c −
2
=
2 2
(1 +
β 2 v '2
y
β
c
+
2 β cv 'x
=c
1+
2
v 'x )2
β 2 v x2'
c2
(1 +
β
c
+2
β
c
v 'x
= c2
v 'x )2
Y'
v
X'=X
Fig. 21: Composizione delle velocità per la luce.
11. Qualche verifica sperimentale
Naturalmente già l’aberrazione della luce stellare è una prova sperimentale della validità
delle trasformazioni di Lorentz. Tuttavia esistono altre prove, per esempio legate alla
trasformazione del tempo. Possiamo cioè verificare direttamente l’esistenza di un fattore
γ tra tempo misurato nel sistema proprio e tempo misurato in un altro sistema di
riferimento. Per illustrare ciò, occorre spendere qualche parola sui decadimenti radioattivi.
Come è probabilmente noto da studi precedenti, la materia è formata da atomi e l’atomo
consiste di un nucleo positivo di protoni e neutroni e di elettroni che formano una nube di
carica negativa intorno al nucleo. Normalmente la struttura nucleare è stabile, ma in alcuni
atomi si osserva il decadere del nucleo in uno o più nuclei diversi con emissione di
radiazione. La radiazione emessa è stata classificata come radiazione alfa, beta e gamma.
La radiazione alfa è stata identificata come nuclei di elio: è formata da due protoni e due
neutroni. La radiazione beta invece è costituita da elettroni emessi da un neutrone che si
trasforma in un protone. Infine la radiazione gamma è costituita da radiazione
elettromagnetica. Quello che ci interessa qui è stabilire la legge del decadimento
radioattivo. I nuclei instabili infatti non decadono tutti insieme, né c’è una maniera per
calcolare un istante preciso in cui un nucleo decadrà: tutto quello che si riesce a fare è di
definire su base statistica, quale frazione dei nuclei saranno decaduti ad un certo istante,
quale è la loro vita media, ecc... Viceversa non abbiamo modo di predire esattamente
quando questo o quel nucleo decadrà. Questo è un fatto alquanto strano e in
contraddizione con la visione meccanicistica del mondo, che è tipica della fisica classica.
Ci si aspetterebbe che, se conoscessimo bene il meccanismo di decadimento, allora
potremmo calcolare esattamente l’istante del decadimento. Come vedremo del resto più
avanti, la meccanica quantistica non ci consente lo stesso tipo di approccio alla natura
tipico della meccanica newtoniana. Supponiamo di avere un numero iniziale N0 (a t=0), di
nuclei che decadono alfa. Vogliamo calcolare il numero di nuclei, N=N(t), che sono
ancora presenti all’istante successivo t>0. Supporremo che il numero di nuclei che
30
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
decadono tra t e t+dt, sia semplicemente proporzionale al numero di nuclei non decaduti
al tempo t attraverso una costante tipica del nucleo: λ. Avremo allora: dN = − Nλdt , dove
il segno meno si giustifica notando che il numero di nuclei che decade nell’intervallo di
tempo scelto è un numero positivo, uguale in valore alla variazione del numero di nuclei,
ma di segno opposto perché dN, come differenziale della funzione decrescente N=N(t), è
dN
negativo. Possiamo integrare questa equazione differenziale:
= −λdt e ottenere:
N
N (t ) = N 0 e −λt . Come si vede il numero di nuclei non decaduti cala esponenzialmente nel
1
tempo. Non è difficile verificare che la vita media dei nuclei è: τ = . La vita media,
λ
infatti, è per definizione:
τ=
−1
N0
+∞
∫t
0
dN
−1
+∞
dt =
tN (t ) 0 +
dt
N0
+∞
∫e
0
− λt
dt = −
1
λ
e − λt
+∞
0
=
1
λ
È possibile raccogliere un gran numero di nuclei instabili, lasciarli decadere e,
misurandone il numero residuo, ottenere un tempo caratteristico di quel nucleo che è la
vita media. Questo tempo può essere misurato nel riferimento proprio dei nuclei, ma
evidentemente può essere misurato anche in un altro sistema in moto rispetto al
riferimento proprio. Per varie ragioni pratiche è più semplice fare questo esperimento con
particelle subnucleari, per esempio con i muoni o µ, la cui vita media è: τ = 2,2 ⋅ 10 s
che decadono in particelle più leggere. La legge del decadimento si applica egualmente ai
muoni e a tutte le altre particelle subnucleari. Possiamo ottenere un fascio di muoni
collimati, cioè caratterizzati dalla stessa velocità in modulo e direzione, ad un
acceleratore, vale a dire una macchina che accelera e produce particelle.
−6
Direzione di volo dei µ
Contatori
Fig. 22: Apparato sperimentale per la misura della vita media dei muoni.
Disponendo di un fascio di muoni, possiamo lasciar decadere questi ultimi in volo, oppure
farli decadere da fermi, dopo averli rallentati in un blocco di materiale. È possibile,
dunque, misurare i tempi di decadimento sia da fermi che in volo e confrontarli.
Vediamo prima il caso di decadimento in volo. L’esperimento fu eseguito da B. Rossi e D.
B. Hall nel 1941. Il fascio attraversa una serie di contatori che ci dicono quanti muoni
sono presenti nel fascio stesso alla posizione occupata dal contatore e dunque al tempo di
attraversamento di quella particolare posizione (fig. 22). Possiamo allora fare un grafico di
tale numero in funzione del tempo:
31
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
ln dNdt( t )) = ln Nτ 0 − τt lnN(t)=l
ln dNdt(t )
lnN
t
Fig. 23: Decadimenti in funzione del tempo.
Qui si è preferito fare un grafico (fig. 23) del logaritmo naturale di
dN (t )
, che risulta in
dt
una retta il cui coefficiente angolare è −1/ τ , cioè l’inverso della vita media dei muoni
nel riferimento del laboratorio in cui i muoni sono in moto.
Alternativamente si possono arrestare i muoni in un blocco di materiale e farli decadere da
fermi. I muoni infatti, attraverso collisioni con gli elettroni atomici, perdono facilmente la
loro energia e si arrestano. Come mostrato in fig. 24, il contatore S1 ci dice quando (t=0)
un muone entra nel blocco, mentre i contatori SA ci dicono quanto tempo dopo il muone è
decaduto rivelando i prodotti di decadimento (elettroni). Rifacendo il grafico precedente,
si misura la vita media nel sistema proprioτ0 . Si verifica così la dilatazione dei tempi:
τ = γτ 0 . Questa misura fu eseguita da Franco Rasetti nel 1941, usando un blocco di
carbonio.
SA
Fascio di µ
S1
Elettrone prodotto dal
decadimento
Fig. 24: Apparato per la misura della vita media di muoni rallentati.
Nell’ultimo decennio, la precisione degli orologi atomici è diventata così buona che la
dilatazione dei tempi è stata misurata con orologi collocati su aerei e satelliti, dunque
senza le potenziali complicazioni dovute all’uso di particelle elementari.
32
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
−t
Come abbiamo detto, la stessa legge N (t ) = N 0 e τ vale per atomi di una sostanza
radioattiva. Per futura referenza, notiamo che, se prendiamo una mole di materiale, allora
−t
dN 1
N0 = N A e
= N Ae τ ; misurato τ , si può calcolare N A , cioè il numero di
dt τ
x
Avogadro. Se abbiamo, invece, x grammi di materiale radioattivo, allora N 0 = N A ,
A
con A peso molare della sostanza radioattiva.
12. Lo spazio di Minkowski
Poiché la trasformazione di Lorentz mette sullo stesso piano la variabile t e le variabili
spaziali, possiamo utilizzare uno spazio quadridimensionale con coordinate x1 , x 2 , x 3 , x 4 .
Essendo impossibile disegnare uno spazio a quattro dimensioni, di solito si disegnano solo
le due dimensioni x1 e x 4 , mentre le due dimensioni x2, x3 , che restano invariate nel
passare da un sistema all’altro, si omettono.
Nel piano di Minkowski (rappresentato in fig. 25) un punto viene chiamato “evento”. Le
due rette a 450 rappresentano il caso x=ct, cioè il caso di un moto alla velocità della luce.
Poiché deve essere x ≤ ct , gli eventi possibili sono dentro “il cono di luce”, dentro cioè le
due zone triangolari limitate dalla rette a 450 e comprendenti l’asse ct.
ct
ct'
x1 = ct
x'1
x1
x1 = −ct
Fig. 25: Piano di Minkowski.
È facile vedere che:
s ' 2 = x 4'2 − ( x1'2 + x 2'2 + x 3'2 ) = γ 2 ( x 4 + βx1 ) 2 − (γ 2 ( x1 + βx 4 ) 2 + x 22 + x 32 ) =
= γ 2 ( x 4 + βx1 ) 2 − (γ 2 ( x1 + βx 4 ) 2 + x 22 + x 32 ) =
= γ 2 ( x 42 − ( βx 4 ) 2 ) − (γ 2 ( x12 − ( βx1 ) 2 ) + x 22 + x 32 ) = x 42 − ( x12 + x 22 + x 32 ) = s 2
33
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
La quantità s2 è dunque invariante nella trasformazione di Lorentz. Una quantità
invariante rispetto ad una trasformazione di Lorentz viene indicata come uno “scalare di
Lorentz”. In un certo senso, questa quantità può sostituire il quadrato della distanza tra
due punti nello spazio di Minkowski. La distanza tra due punti spaziali infatti è invariante
rispetto ad una trasformazione di Galileo, ma non rispetto ad una di Lorentz. Attenzione
però: s2 non è definita positiva. Per due punti infinitamente vicini, si ha:
ds 2 = dx 42 − dx11 − dx 22 − dx 32 . Vogliamo notare che avremmo potuto definire:
s 2 = x12 + x 22 + x 32 − x 42 , con eguale diritto. Effettivamente l’intera relatività speciale può
essere trattata a partire dall’una o dall’altra definizione.
Possiamo definire, in analogia con lo scalare di Lorentz, un vettore di Lorentz come un
insieme di quattro quantità che trasformano come le coordinate.
È interessante vedere come viene rappresentata una trasformazione di Lorentz nel piano di
x' = γ ( x − βct )
Minkowski
ct ' = γ (ct − βx)
x' = 0
I due assi del nuovo sistema saranno definiti dalle relazioni:
e dunque saranno le
ct ' = 0
1
ct = x
β
due rette:
ct = βx
Queste due rette hanno coefficienti angolari tgα ct =
1
β
e tgα x = β . Poiché β ≤ 1 ,
α x sarà minore di 450 e α ct sarà uguale a 180 0 − α ct . Dunque la trasformazione di
Lorentz in questo piano non è ortogonale, non lascia cioè gli assi ortogonali.
Un’altra interessante osservazione è che, se esistesse un qualcosa che viaggia a velocità
superiore a quella della luce (una ipotetica particella con velocità superiore a c viene
chiamata “tachione”), allora si potrebbero trovare sistemi di riferimento nei quali la
sequenza temporale di due eventi è invertita. Se una cosa del genere potesse accadere,
sarebbe possibile allora un’ inversione della sequenza temporale di due eventi dei quali
uno è causa dell’altro. Per esempio, consideriamo i due eventi: 1) un quanto di luce parte
da un punto x al tempo t e 2) un quanto di luce è assorbito da un atomo. Questi eventi
devono essere nella sequenza temporale giusta, perché sarebbe illogico che un quanto
venga assorbito prima della sua emissione. Il principio di causalità, che asserisce che la
causa deve venire prima dell’effetto, verrebbe altrimenti violato.
Come si vede in fig. 26, due eventi P1 e P2 hanno sequenze temporali invertite nei due
sistemi S e S'. Questo non è un problema, se i due eventi non hanno nessi causali. Se però
esistesse un segnale che viaggia a velocità superiore a quella della luce allora i due eventi
potrebbero essere connessi causalmente. È facile infatti vedere che un segnale che unisse
P1 a P2 viaggerebbe ad una velocità superiore a quella della luce, infatti la retta P1P2 è
34
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
meno ripida del limite del cono della luce. Se ne deduce che niente può viaggiare a
velocità superiore a c.
ct
ct'
x1=ct
P1
P2
x'1
x1
x1=-ct
Fig. 26: Non è possibile superare la velocità della luce.
Conclusione
Come si è visto, nella relatività ristretta il tempo non è universale, cioè indipendente dal
sistema di riferimento, come in fisica classica. Questo certamente stupisce e, per darci una
spiegazione, occorre pensare a quello che il tempo rappresenta in fisica. Nel descrivere il
moto all’interno di un sistema isolato, ovvero sotto osservazione da parte di uno
sperimentatore, che con il suo osservare apporta una perturbazione trascurabile
all’evoluzione del sistema, noi paragoniamo in effetti il moto del sistema ad un moto
standard. Questo moto standard è quello di un altro sistema che chiamiamo “orologio”. Si
può trattare del moto dell’ombra della punta di uno gnomone o delle oscillazioni di un
pendolo o di quelle del campo elettromagnetico generato dall’emissione di luce da un
atomo. Di qualunque cosa si tratti, il tempo fisico non è, come diceva Newton “Il tempo
assoluto, vero e matematico, in sé e per sua natura, senza riferimento ad alcun oggetto
esterno, scorre uniformemente…”∗ . Misurare un tempo è invece mettere in relazione due
∗
I. Newton, Principi matematici della filosofia naturale, con note di F. Enriques e U.
Forti, Zanichelli 1994, p. 40.
35
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
sistemi e mettere in ordine gli stati dell’uno, usando la sequenza degli stati dell’altro.
Dunque la frase “senza riferimento ad alcun oggetto esterno” non ha senso. Per esempio
possiamo chiedere: quante oscillazioni ha compiuto il nostro pendolo mentre il sistema è
evoluto dallo stato A allo stato B∗∗? La fisica ha alcuni assunti fondamentali. Tra questi
l’esistenza di una realtà esterna all’essere pensante. Inoltre assume che certe leggi possono
essere trovate che correlino, in termini matematici, diverse quantità fisiche che
definiscono lo stato di un sistema. Queste leggi sono invarianti tra due sistemi di
riferimento traslati o ruotati o con un diverso inizio del tempo. Per stabilire tali relazioni
matematiche, essa definisce le sue quantità come quantità misurabili e dunque cui si può
associare un numero con una misura. Il sistema di paragone con cui si associa ad una
quantità un valore è lo strumento di misura e l’operazione di associazione di tale numero
allo stato del sistema è l’operazione di misura. Così anche per il tempo. Il tempo è quel
parametro che misuriamo con un orologio. Dobbiamo dare solo una descrizione del
principio su cui funziona un orologio, rendere il tutto plausibile e verificare le
conseguenze della definizione operativa data. Si può, per esempio, verificare che tutti i
pendoli di uguale lunghezza, fatti partire simultaneamente, completano le loro oscillazioni
simultaneamente Possiamo notare che la simultaneità viene perduta se le ampiezze della
loro oscillazione sono molto diverse. Ne deduciamo che il periodo di oscillazione di un
pendolo è costante. Possiamo decidere di chiamare unitario il periodo di un pendolo di
lunghezza unitaria. Possiamo insomma definire un orologio basato sull’oscillazione di un
pendolo: un orologio è una macchina che conta il numero di oscillazioni del pendolo tra il
momento in cui la facciamo partire ed il momento attuale. La misura del tempo di un
punto in moto, si ottiene confrontando il numero di oscillazioni contate dall’orologio, a
certi istanti, con la posizione occupata dal punto a quegli istanti. Non c’è nulla di
metafisico o incomprensibile in questo. S'intende che il concetto di tempo o di
simultaneità può avere bisogno di una lunga discussione per essere introdotto in maniera
ineccepibile, ma qui possiamo essere soddisfatti della definizione data. Sarà però
conseguenza di questa definizione che, se un orologio si comporta in maniera diversa in
sistemi in moto relativo, i tempi saranno diversi: si verificheranno una dilatazione dei
tempi ed una perdita di sincronia. È quello che accade in relatività, come conseguenza
dell’assoluta costanza della velocità della luce. Se tempo assoluto significa, tra l’altro,
tempo universale cioè indipendente dal riferimento, la Relatività Ristretta nega l’esistenza
di un tempo assoluto. Ciò significa che un orologio, evidentemente basato sulle leggi della
fisica, darà risultati della misura dipendenti dallo stato di moto dell’osservatore.
Facciamo un esempio sul quale lo studente può ritornare a riflettere dopo che altre nozioni
saranno state date. La definizione attuale del secondo, l’unità di tempo, è data sulla base
delle oscillazione del campo elettromagnetico della luce emessa da un atomo di Cesio,
precisamente dall’isotopo 55Cs133. Il campo elettrico compie 9.192.631.770 oscillazioni al
secondo, o meglio quando il campo elettrico ha oscillato 9.192.631.770 volte, noi diciamo
che è passato un secondo, cioè il periodo di oscillazione viene definito come:
∗∗
Per un’approfondita discussione vedere: E. Mach, La meccanica nel suo sviluppo
storico-critico, Universale Bollati Boringhieri, pag. 240.
36
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
T = (1 / 9.192.631.770) s . L’oscillazione di questa radiazione, emessa nella transizione
energetica (corrispondente a 3,8 10-5eV) tra due livelli iperfini è molto stabile e
riproducibile: gli esperti la ritengono la miglior definizione possibile di secondo. Bene, se
ci spostiamo su di un sistema in moto rispetto al nostro, vedremo che il periodo, dell’onda
emessa è mutato da T a T ' , a causa dell’effetto Doppler (cambia il colore della luce
emessa da una sorgente in movimento) come studieremo nei Cap. 5 e 8. È chiaro allora
che osservatori, su sistemi di riferimento diversi, contando 9.192.631.770 oscillazioni
troveranno secondi di durata effettivamente diversi e riterranno che gli orologi propri e
quelli altrui battono il secondo in maniera diversa. Una discussione simile andrebbe fatta
intorno al concetto di spazio. Rimandiamo al prossimo capitolo la discussione, alla quale
si è già accennato, sullo spazio assoluto. Si vuole però far notare come si sia assunto che
lo spazio della fisica è quello che obbedisce alle regole della geometria euclidea. Questo
punto è stato l’oggetto della critica di Einstein e ancor prima dell’analisi di matematici
come K. F. Gauss (1777-1855), J. Boloyai (1775-1856), N. I. Lobacevskij (1793-1856),
B. Riemann (1826-1866), E. Beltrami (1836-1900), G. Ricci (1853-1925), T. Levi Civita
(1873-1941).
Come si sa dagli studi elementari, la geometria euclidea è basata su cinque postulati,
l’ultimo dei quali stabilisce che, data una retta ed un punto al di fuori di essa, si può
tracciare solo una parallela alla retta passante per quel punto. In maniera equivalente si
può dire che la somma degli angoli interni di un triangolo è 1800. Questo quinto postulato
è sempre apparso come qualcosa che si doveva poter dedurre dai primi quattro e molti
matematici hanno provato a farlo, fallendo miseramente. Boloyai accettò il fatto che il
quinto non fosse derivabile dagli altri quattro e provò ad assumere vero il contrario, cioè
che esistessero più parallele o nessuna. Non trovò però nessuna contraddizione interna alla
geometria che si poteva stabilire con i primi quattro postulati e col quinto così modificato.
Dunque sono possibili altri due sistemi geometrici basati non sul quinto postulato, ma
sulla sua negazione. Se esistono geometrie possibili, diverse da quella euclidea, nasce
immediatamente la domanda: quale è la geometria giusta per descrivere il mondo fisico?
La risposta non è immediata. Per esempio, se il postulato delle parallele non è accettato, la
somma degli angoli interni di un triangolo non è 1800.
È facile trovare un esempio di triangoli di questo tipo: basta guardare ad un triangolo su
una sfera. La fig. 27 ce lo mostra chiaramente.
Dunque la geometria sulla sfera a differenza di quella sul piano, non è euclidea. Un altro
punto importante è che il rapporto tra una circonferenza e il diametro non è più π.
900
R
ρ
α
r
900
900
37
Fig. 27: Relazione circonferenza-raggio e somma degli
angoli interni di un triangolo.
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
Riguardiamo la figura della sfera. Il raggio del cerchio tracciato sulla superficie sferica è:
r
ρ = Rsenα = Rsen e dunque la circonferenza è: C = 2πρ = 2πRsenα , ma il raggio del
R
cerchio sulla sfera è: r = Rα , dividendo la circonferenza per il diametro sia ha:
r
sen
C
senα
R
=π
=π
, che è ovviamente più piccolo di π e che tende a π solo quando
r
2r
α
R
R diverge o quando lo spazio diviene piatto. Al concetto di retta si può sostituire quello di
geodetica: la curva più breve tra due punti. Sulla sfera pertanto le “rette” saranno
identificate coi cerchi massimi, Si trova così che, data una retta ed un punto fuori di essa,
non esistono rette parallele che passano per quel punto: infatti i cerchi massimi si
incontrano in due punti.
Si noti che, a titolo di esemplificazione, la geometria su un cilindro è perfettamente
euclidea. Ce ne possiamo convincere avvolgendo un piano, su cui abbiamo tracciato due
parallele, su una superficie cilindrica.
Un’altra geometria, è quella basata sulla “pseudosfera” di Eugenio Beltrami, che si ottiene
facendo ruotare intorno all’asse X la curva detta “trattrice” (fig. 28). Sulla pseudosfera si
trova che esistono due parallele per ogni punto fuori di una retta e che la somma degli
angoli interni di un triangolo è minore di π.
Un punto interessante da notare è che se, data una retta e un punto fuori di essa, non è
possibile tracciare una retta ad essa parallela o viceversa ne possiamo tracciare più di una,
allora non è possibile definire le coordinate cartesiane. Dunque una caratteristica di una
geometria non euclidea è l’impossibilità di definire delle coordinate cartesiane: il lettore
può verificare facilmente questo fatto su di una sfera
Qui parliamo comunque di superfici a due dimensioni. Se il concetto di sfera e di spazio
curvo può essere esteso a spazi con più dimensioni, allora dobbiamo chiederci se il nostro
spazio fisico non sia curvo come una sfera (in quattro dimensioni), cioè se non viviamo su
una superficie curva a tre dimensioni di uno spazio a quattro dimensioni o viviamo invece
in uno spazio tridimensionale piatto: l’equivalente del piano, cioè senza curvatura, ma in
tre dimensioni. Il concetto di curvatura fu introdotto da Riemann che completò l’opera con
il concetto di metrica, trovò cioè il modo di introdurre la distanza tra punti infinitamente
vicini in uno spazio in cui la curvatura cambia continuamente e di geodetica. La sfera è la
38
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
superficie a curvatura costante positiva; la pseudosfera è la superficie a curvatura costante
negativa.
Il primo a rendersi conto che lo spazio fisico non è sempre a curvatura nulla, fu Einstein.
Il suo ragionamento possiamo capirlo adesso che abbiamo studiato la cinematica della
relatività ristretta. Immaginiamo un disco ruotante sul suo asse, in modo che un punto
sulla periferia del disco possa muoversi ad una velocità prossima a quella della luce (fig.
29).
Evidentemente, muovendosi il punto con velocità costante le lunghezze in sua prossimità
saranno contratte lungo la direzione della velocità a causa della trasformazione di Lorentz.
Tuttavia il raggio, muovendosi perpendicolarmente alla velocità, non subisce contrazione.
Se il rapporto tra raggio e circonferenza a disco fermo è 2π, esso non può restare pari a 2π
1,0
0,8
f(x)
0,6
0,4
0,2
0,0
-4
-2
0
2
4
X
Fig. 28: Trattrice di Beltrami.
se il disco ruota, e dunque la geometria nel sistema accelerato non sarà euclidea: il
rapporto circonferenza/diametro non sarà più π. Considerazioni equivalenti si possono
fare per il tempo: basta disporre orologi su varie circonferenze e, muovendosi gli orologi a
diverse velocità, subiranno diverse dilatazioni dei tempi: il tempo in un sistema in moto
rotatorio, dipende dalla posizione radiale occupata.
Da tutto ciò si deduce che non è possibile in generale stabilire un sistema di riferimento
cartesiano globale, cioè valido ovunque, al più si potrà stabilire un riferimento cartesiano
locale, cioè valido solo in una zona infinitesima prossima all’origine. Per esempio questo
39
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
è ciò che abbiamo fatto nello stabilire una velocità ed un’accelerazione radiale e una
tangenziale, dove abbiamo stabilito l’esistenza di riferimenti locali “naturali” formati da
un’origine nel punto in moto e da i due versori k ρ e k t . Detto con parole diverse,
possiamo pensare che il tensore metrico non è euclideo ed è, in generale, funzione delle
coordinate; lo spazio sarà dunque curvo. I soli riferimenti cartesiani che possiamo
introdurre sono locali e non globali.
Z
X
Contrazione lungo X
Y
Nessuna contrazione lungo Y
Fig. 29: Disco rotante intorno al proprio asse.
Appendice 1. Il gruppo delle rotazioni e quello di Lorentz
Dato uno spazio puntuale R n in cui introduciamo un sistema di riferimento costituito da
un punto e da n versori ortonormali (O , e1 , ..., en ) , chiamiamo rotazione un cambiamento
della base, che lascia l’origine intatta: (O , e1 , ..., en ) ⇒ (O , e '1 , ..., e 'n ) . Dette ε ij le
componenti dei vecchi vettori di base rispetto alla nuova base, abbiamo: e j =
∑ε e ' .
i
j
i
i
Dunque per un vettore generico: a =
∑a e
j
j
il passaggio alla nuova base dà:
j
a=
∑a e = ∑a ε e ' = ∑a' e '
j
j
a 'i =
j i
j
j
i
∑a ε
j i
j
. Questa
i
i
i
, dunque le componenti cambiamo con la legge:
i
relazione può essere riscritta
nella
forma
matriciale:
j
a '1 ε 11 ... ε n1 a1
. = . ... . . . Dunque ad ogni rotazione si può associare una matrice.
n n
n n
a ' ε 1 ... ε n a
L’insieme delle matrici n × n formano un gruppo non-Abeliano. L’operazione di
moltiplicazione è quella righe-colonne. L’elemento neutro della moltiplicazione è:
40
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
1 ... 0
. 1 . . Il risultato di due rotazioni si ottiene così moltiplicando le due matrici
0 ... 1
relative a ciascuna rotazione e applicando il risultato al vettore. Questo gruppo è indicato
come O( n) . Classicamente, a noi interessa il caso di O(3) .
Abbiamo visto che nel caso di una rotazione intorno all’asse Z di un angolo θ ,
a '1 cos θ sin θ 0 a1
abbiamo: a '2 = sin θ cos θ 0 a 2 . La rotazione più generale che si può avere la
2
0
1 a 3
a' 0
si costruisce con tre rotazioni: una intorno all’asse Z (α ) , seguita da una intorno al
nuovo asse X ( β ) e, infine una terza intorno al nuovo asse Z (γ ) . I tre angoli si
chiamano angoli di Eulero. La rotazione completa si ottiene moltiplicando le tre matrici
relative alle tre rotazioni:
1
a '1 cos γ − sin γ 0 1
0
0 cos α − sin α 0 a
a '2 = sin γ cos γ 0 0 cos β − sin β sin α cos α 0 a 2
3
0
1 0 sin β cos β 0
0
1 a 3
a' 0
a '1 cos γ
a '2 = sin γ
3
a' 0
− sin γ
cos γ
0
0 cos α
0 sin α cos β
1 sin α sin β
− sin α
cos α cos β
sin β cos α
a
− sin β a 2
cos β a 3
0
1
a '1 cos γ cos α − sin α cos β sin γ − cos γ sin α − cos α cos β sin γ − sin β sin γ a1
a '2 = sin γ cos α + sin α cos β cos γ − sin γ sin α + cos α cos β cos γ − sin β cos γ a 2
3
3
sin α sin β
sin β cos α
cos β
a'
a
Come si può controllare facilmente, la somma dei quadrati degli elementi di una riga è
uguale a 1 e il prodotto scalare tra due righe è zero: gli elementi della matrice sono infatti
le componenti dei vettori di una base ortonormale.
Anche le trasformazioni di Lorentz possono mettersi nella forma matriciale:
41
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
a '0 γ
a '1 = βγ
a '2 0
a '3 0
βγ
γ
0 0 a0
0 0 a1
proprio come una rotazione che, in effetti, nello spazio
0 1 0 a2
0 0 1 a3
0
0
0 a0
a '0 1
a '1 0 cos θ − sin θ 0 a1
quadridimensionale si scrive:
. Moltiplicando due
=
a '2 0 sin θ cos θ 0 a2
0
0
1 a3
a '3 0
matrici (due trasformazioni di Lorentz), otteniamo:
a '0 γ 1γ 2 (1 + β1 β 2 ) −γ 1γ 2 ( β1 + β 2 ) 0 0 a0
a '1 = −γ 1γ 2 ( β1 + β 2 ) γ 1γ 2 (1 + β1 β 2 ) 0 0 a1
da cui deduciamo che
a '2
0
0
1 0 a2
0
0
0 1 a3
a '3
applicare due trasformazioni successive è equivalente ad un’unica trasformazione con
β1 + β 2
gamma pari a γ 1γ 2 (1 + β1 β 2 ) e beta pari a
. Le trasformazioni di Lorentz
1 + β1 β 2
42
Cap. 1 – Cinematica del punto materiale
________________________________________________________________________
formano un gruppo con l’elemento neutro (la matrice unità) che si ottiene per γ = 1 e
β = 0 e l’inverso che si ottiene ponendo γ 1 = γ 2 e β 2 = − β1 .
43