INVERTER per motori asincroni trifase a induzione
compatti multifunzione
PWM vettoriali ad alte prestazioni
Manuale operativo di istruzione, uso,
manutenzione e sicurezza
serie VFR9000
- per alimentazione 230V monofase 50Hz - per alimentazione 380/460V trifase 50/60Hz
©Rimor VFR900_mt_01_2015 Tutti i diritti riservati
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 1
Introduzione
Grazie per aver acquistato un inverter della serie VFR9000
Questa serie è realizzata usando le più moderne tecnologie costruttive. E’ adatta per comandare motori asincroni
ad induzione con rotore a gabbia per azionamento ventilatori, pompe e macchinari per ogni applicazione a
velocità variabile, anche coppie resistenti elevate sia in fase di spunto che in fase operativa.
Questo Manuale operativo fornisce agli Utenti le istruzioni di base più usuali sull’installazione, l’impostazione
dei parametri, la diagnosi dei guasti, la manutenzione di routine e le avvertenze sulla sicurezza.
E’ completato dal Manuale di dettaglio fornito insieme al prodotto.
Entrambi i manuali possono essere richiesti in qualsiasi momento alla Rimor.
Si prega di leggere attentamente i Manuali prima dell’istallazione del prodotto, in modo da assicurarsi che
venga installato ed usato correttamente.
Sono previste le seguenti modalità di impiego per uso generale:
carico leggero ( F)
carico standard (G)
carico medio (M)
carico pesante ( H)
Si prega di conservare questo Manuale dell’Utente, poiché sarà utile per la sicurezza, manutenzione ed
applicazioni future e riparazioni eventuali.
Per informazioni sul prodotto, si prega di contattare la Rimor:
[email protected]
www.rimor.eu.
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 2
1.0
Ispezione e Precauzioni di Sicurezza
Gli inverter RIMOR VFR9000 sono stati testati ed ispezionati dal Produttore prima di essere immessi sul mercato.
Prima di disimballare il prodotto, controllare se la confezione è danneggiata e se le specifiche e il tipo di prodotto non corrispondono all’ordine.
Si prega di contattare RIMOR se si rilevasse qualsiasi problema.
1-1.
Ispezione dopo il disimballaggio
Controllare che ci sia tutto il contenuto (un inverter VFR9000 e un Manuale d’Uso).
Controllare la targhetta dell’inverter assicurarsi che il prodotto ricevuto corrisponda a quanto ordinato.
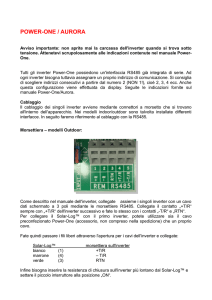
Istruzioni sulla targhetta: (prendendo 132kW/380V come esempio)
Inverter model
Output Power Spec.
Output Spec.
Input Source Spec.
Bar Code
Production Sequence Number
Production Address
MODEL:
PI9100A 004G3
POWER
OUTPUT:
SOURCE:
4 kW
AC 3PH 400V 10. 5A 50Hz/60Hz
AC 3PH 0V~ 400V 9A 0Hz/400Hz
ZPC5B5319309
http://www.rimor.eu
MADE IN PRC
Designazione del modello:
PI
91
0 0 A 1 7R5 G 3
Inverter RIMOR
Codice Serie
910PI9100 serie 930PI9300 serie
920PI9200 serie 940PI9400 serie
Codice Derivato
00102......
Livello di tensione in ingresso
1: mono-fase 220V 2: Tri-fase 220V
3:Tri-fase 380V
4: Tri-fase 480V
6: Tri-fase 690V
Codice Classe:
0: Configurazione Standard
1: Configurazione Speciale 1
2: Configurazione Speciale 2
Codice Funzione ( )
Tipo Generale
F: Carico leggero
G: Carico standard
Codice Tipo:
A:IGBT singolo
B:Intelligenza Integrata
Modulo di potenza (omesso)
Numero Versione:
0: Default (omesso)
1:Versione aggiornamento
Output potenza nominale (●●●)
Esempio:7R5:7.5kW132:132kW
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 3
1-2.
Normative e rispondenze:
marcatura CE
EMC-2014/30/CE – Compatibilità elettromagnetica
Direttiva Materiale Elettrico in Bassa Tensione 2014/35/CE
rispondenza RoHS
1-3.
Precauzioni per la sicurezza
Leggere con attenzione il presente manuale di istruzione al fine di un corretto impiego dell’inverter e per la
prevenzione di lesioni e danni all’utente, alle persone e alle cose nella zona di installazione e per le modalità
di impiego.
E’ necessario seguire tutte le segnalazioni e le avvertenze indicate.
Limiti di impiego
L’inverter oggetto del presente Manuale è adatto solo per la regolazione di velocità di motori trifase ad induzione, per uso industriale.
Precauzioni per la sicurezza
L’inverter non deve essere utilizzato in applicazioni o dispositivi che con il loro cattivo funzionamento possono
causare pericoli a persone o che per un errore di funzionamento possono rappresentare rischio diretto per le
persone(ad es. sistemi di controllo in campo nucleare, sistemi di controllo a bordo di velivoli, sistemi di controllo del traffico, sistemi di sopravvivenza , dispositivi di sicurezza, ecc.).
In caso di dubbi al riguardo contattare il Fornitore. In tutti i casi nei quali errori di funzionamento o guasti
dell’inverter potrebbero causare incidenti alle persone o danni alle cose, è necessario predisporre dispositivi
di sicurezza sulla macchina a bordo della quale viene installato l’inverter.
Questo prodotto è stato costruito in base ai controlli di qualità più rigorosi ma, nel caso in cui debba essere utilizzato in attrezzature critiche, per esempio attrezzature nelle quali errori nel sistema di gestione
di segnali di malfunzionamento potrebbero causare incidenti gravi, è necessario installare dispositivi di
sicurezza sull’attrezzatura.
L’utilizzo di questo inverter per carichi diversi da motori trifase ad induzione può causare incidenti o danni.
Evitare l’uso in applicazione diverse dalla alimentazione e regolazione di motori trifase
Attenzione Pericolo
Non rimuovere mai le protezioni, smontare l’inverter o tentare delle riparazioni o delle modifiche anche quando
questo è staccato dalla rete di alimentazione - rischio di fulminazioni, incendio o lesioni -.
Per le riparazioni contattare il Servizio di Assistenza Rimor.
Non rimuovere mai il coperchio di protezione della unità o delle morsettiere sia di potenza che ausiliarie
quando l’inverter è alimentato. In caso di montaggio in quadro elettrico la porta di questo deve sempre essere
chiusa quando l’inverter è alimentato - rischio di fulminazione elettrica - presenza di parti ad alta tensione.
Evitare il contatto con parti interne o con parti in movimento ( ventole interne ) o con le morsettiere o le aperture
di ingresso cavi - rischio di fulminazioni elettriche o altre lesioni.
All’interno dell’inverter non devono essere lasciati residui di cavi di cablaggio o altri oggetti estranei - rischio
di fulminazioni elettriche o incendi.
Non premettere che acqua o altri liquidi vengano a contatto dell’inverter o vi penetrino - rischio di fulminazioni
elettriche o incendio
Prima di alimentare l’inverter assicurasi che siano state montate le protezioni e il coperchio e che la porta del
quadro in cui è installato sia chiusa - rischio di fulminazioni elettriche o lesioni alle persone.
Se dall’inverter si nota uscita di fumo o si sentono odori o rumori anomali, disconnettere immediatamente la
alimentazione e contattare il Servizio di Assistenza Rimor – rischio di incendio.
Se l’inverter deve essere messo fuori servizio per lunghi periodi di tempo, scollegare sempre la alimentazione
- rischio di penetrazione di polvere, acqua o altro - rischio di funzionamento anomalo o di incendio.
Attenzione Pericolo di ustione
Non toccare le alette del dissipatore i resistori di frenatura o i dispositivi esterni ( filtri EMI, induttanze, reattanze, ecc.). Questi dispositivi possono essere molti caldi e causare ustioni anche gravi se toccati.
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 4
1-4. Ulteriori precauzioni di sicurezza per l’operatore
Le precauzioni per la sicurezza in questo manuale sono divise nelle seguenti due categorie:
Pericolo: la mancata osservanza delle regole descritte per il funzionamento,può provocare lesioni
gravi o gravissime alle persone, sino ad eventi letali;
Attenzione: la mancata osservanza delle regole descritte per il funzionamento, può causare lesioni
e danni alle apparecchiature;
Processo
Descrizione
Tipo
Prima della installazione
Pericolo
Pericolo
• Si prega di installare l’unità su parti metalliche o trattate con agenti
ritardanti al fuoco;lontano da sostanze combustibili. In caso contrario
si potrebbe causare un incendio!!
• Non forzare mai le viti di fissaggio delle parti.
Note
• Non lasciare cadere pezzi di cavo o viti all’interno, possono causare
danni al driver!
• Tenere il driver lontano da vibrazioni eccessive e dalla luce solare
diretta.
• Quando vengono installati due o più driver nello stesso armadio, si
prega di prestare attenzione alla posizione di installazione,assicurarsi
che la dissipazione del calore sia sufficiente
Pericolo
• Le modalità di installazione devono essere conformi a quanto riportato
su questo manuale,la messa in opera deve essere eseguita da personale specializzato,altrimenti ci sarebbe la possibilità di rischio inaspettato!
• L’unità deve essere collegata a valle di un interuttore di protezione,
altrimenti potrebbe esserci rischio di incendio!
• Verificare la mancanza di tensione prima di collegare il driver, in
caso contrario vi è il rischio di scosse elettriche!
• L’inverter deve essere collegato a terra correttamente in base alle specifiche standard, altrimenti si corre il rischio di scosse elettriche!
• Assicurarsi che la linea di alimentazione sia conforme alle direttive regionali di sicurezza di requisiti EMC. Il diametro del filo usato deve fare
riferimento alle raccomandazioni di questo manuale. In caso contrario,
può causare un incidente!
• Non collegare mai direttamente la resistenza di frenatura al bus DC
terminali P (+) e P (-). In caso contrario, si potrebbe provocare un
incendio!
• L’encoder deve essere collegato utilizzando un cavo schermato e la
schermatura deve garantire il single-ended a terra!
Durante l’installazione
Durante il cablaggio
• Durante l’apertura dell’imballo se si nota la presenza di acqua o parti
danneggiate o mancanti, non installare!!
• Se la lista delle parti comprese nell’imballo non corrisponde , non
installare!!
• Maneggiare con cura, altrimenti si corre il rischio di danneggiare
l’apparato.
• Si prega di non utilizzare l’inverter danneggiato o con parti mancanti, in
caso contrario vi è il rischio di lesioni!
• Se l’apparato viene aperto, non toccare con mano le parti del sistema
di controllo,in caso contrario vi è rischio di danni dovuti alla elettricità
statica!!
segue
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 5
Processo
Descrizione
Tipo
Note
• Si prega di controllare se la tensione di alimentazione in ingresso è
uguale alla tensione nominale dell’inverter; le posizioni di cablaggio
dei terminali di ingresso (R, S, T) e terminali di uscita (U, V, W) sono
corretti oppure no; e notare che se c’è un cortocircuito nel circuito
periferico collegato al driver, se i fili collegati sono stretti, altrimenti
potrebbe causare danni al driver!
• Non è necessario eseguire Prova di tenuta di tensione per qualsiasi
parte dell’inverter, questo prodotto è stato testato prima di lasciare la
fabbrica. In caso contrario, può causare un incidente!
Pericolo
• Il coperchio di copertura delle connessioni elettriche deve essere
chiuso prima di dare tensione all’inverter. In caso contrario c’è pericolo
di scossa elettrica!
• Il collegamento di tutti gli accessori esterni devono essere conformi
con la guida di questo manuale, si prega di cablare correttamente in
conformità con i metodi di connessione dei circuiti descritti in questo
manuale. In caso contrario, può causare un incidente!
Pericolo
• Non togliere I coperchi di protezione dopo aver dato tensione,altrimenti
vi è rischio di scosse elettriche!
• Non toccare il driver e circuiti periferici con le mani bagnate. In caso
contrario vi è il rischio di scosse elettriche!
• Non toccare i terminali di ingresso e di uscita dell’inverter. In caso
contrario vi è il rischio di scosse elettriche!
• L’inverter esegue automaticamente il test di sicurezza
• per il circuito elettrico esterno nelle prime fasi di eccitazione, quindi
mai toccare i terminali del driver (U, V, W) o morsetti del motore, in
caso contrario vi è il rischio di scosse elettriche!
• Se avete bisogno di identificare i parametri del motore, si prega di
prestare attenzione al pericolo di lesioni durante la rotazione. In caso
contrario, può causare un incidente!
• Si prega di non cambiare I parametri di fabbrica dell’inverter. In caso
contrario si potrebbe danneggiare questa unità!
Pericolo
• Non toccare la ventola di raffreddamento e la resistenza di scarica per
sentirne la temperatura. In caso contrario, può causare ustioni!
• Non è consentito fare misurazioni durante il funzionamento, se non da
personale specializzato. Ciò potrebbe causare lesioni o danni a questa
unità
Note
• Quando l’inverter è in funzione, si dove evitare che oggetti estranei
entrino in questa unità. In caso contrario, può causare danni all’unità!
• Non avviare o fermare l’inverter usando l’interruttore di protezione
posto a monte. In caso contrario si possono causare danni
Pericolo
• Non eseguire riparazioni e/o manutenzione con
• apparecchiature elettriche in tensione. In caso contrario vi è il rischio di
scosse elettriche!
• La riparazione e la manutenzione può essere eseguita
• solo quando la tensione del bus inverter è inferiore a 36V, In caso
contrario, la carica residua, potrebbero causare danni alle persone!
• Non è permesso a personale non addestrato ad effettuare riparazioni
e/o manutenzione di questo inverter.
• Ciò potrebbe causare lesioni personali o danni a questa unità!
• Dopo aver sostituito l’inverter, occorre impostare tutti I parametri, e
controllore tutte le connessioni periferiche!
Prima di dare tensione
Dopo aver dato tensione
Durante la marcia
Durante la manutenzione
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 6
Precauzioni
No.
Descrizione
Tipo
1
Controllo isolamento del
motore
Si devono effettuare controlli di isolamento degli avvolgimenti del motore con misuratore di isolamento 500V d.c o superiore, scollegare sempre prima il motore dall’inverter. In caso contrario la
tensione generata dal misuratore di isolamento danneggerebbe gravemente l’inverter.
Con misuratore a 500V d.c., la resistenza di isolamento del motore non dovrebbe essere inferiore a
10MΩ.per motore nuovo e 1 MΩ per motore usato
2
Protezioni termiche del
motore
Se la potenza nominale del motore non corrisponde a quella dell’inverter, soprattutto quando l’inverter è di potenza nominale superiore, assicurarsi di regolare i valori dei parametri di protezione
del motore sull’inverter o installare relè magnetotermico prima del motore.
3
Uso oltre la frequenza
nominale del motore
La gamma di frequenza di uscita dell’inverter è da 0 Hz a 300Hz
Se il motore deve funzionare oltre 50 Hz, occorre verificare che la coppia
resistente del carico non richieda all’inverter una potenza superiore alla
nominale.
4
Vibrazioni meccaniche
La frequenza della portante (carrier frequency) dell’inverter potrebbe indurre fenomeni di risonanza
magnetica sul motore comandato. E’ possibile superare il problema con un adeguato settaggio
della portante stessa (F0.18).
5
Calore del motore e
rumore
La tensione di uscita dell’inverter è un’onda PWM che contiene una certa quantità di armoniche,
quindi temperatura, rumore e vibrazioni del motore potrebbero essere superiori al funzionamento
con tensione diretta sinusoidale da rete a 50Hz.
6
Piezoresistore o
condensatore in uscita
per fattore di potenza
La tensione in uscita all’inverter è un’onda PWM, quindi non è consentito installare tra inverter e
motore piezoresistori o condensatori che potrebbero generare una sovracorrente istantanea che
danneggerebbe l’inverter.
7
Contattore o Interruttore
utilizzato sui terminali di
ingresso/uscita
Se viene installato un contattore tra l’alimentazione e l’inverter, non è permesso usarlo per avviare/
arrestare l’inverter . Se necessariamente bisogna utilizzare il contattore per controllare l’avvio inverter / stop, l’intervallo tra star/stop non dovrebbe essere meno di un’ora. Ricarica frequente e scarica
può ridurre la durata del condensatore dell’inverter. Se il contattore o interruttore è montato tra i
terminali di uscita del motore, deve essere attivato/disattivato quando non vi è tensione in uscita,
altrimenti si può danneggiare il modulo inverter.
8
Uso a tensione diversa
dalla nominale
L’inverter della serie PI non può essere uato con una tensione di funzionamento superiore a quella
di targa in quanto si possono causare danni alle parti interne che compongono l’inverter. Se necessario si prega di utilizzare un trasformatore adatto per cambiare tensione.
9
Non alimentare in
monofase un inverter
trifase
Non alimentare mai l’inverter trifase con solo due fasi. In caso contrario si danneggerà l’inverter
9bis
Non alimentare con
inverter motore
monofase con
condensatore
La presenza di condensatori sul motore provoca danni gravi all’inverter. Per comando motori
da rete monofase usare invertere appositi con ingresso monofare e uscita trifase, usando quindi
motote trifase.
10
Protezione contro le
sovratensioni
La serie PI è dotata di protezione contro la sovratensioni sulla alimentazione.
Se si prevede la possibilità di sovratensioni frequenti ed elevate, è necessario prevedere aanche
una protezione prima dell’inverter.
11
Uso in quota e/ a
temperature basse od
elevate
Se l’inverter viene utilizzato oltre i 1000 m.s.l.m va declassato (sentire Rimor)
Se l’inverter funzione a temperature superiori a + 40 °C ambiente fino a 50 °C va declassato
(sentire Rimor)
Si prega di consultare Tecnico Rimor per dettagli sull’applicazione nel caso si debba operare a
temperature inferiori a – 10°C o superiori a + 50°C.
12
Usi speciali
Se l’utente deve utilizzare metodi diversi di collegamento da quelli previsti nel presente manuale,
come ad esempio bus comune CC, si prega di consultare Tecnico Rimor.
13
Precauzioni per lo
smaltimento di parti
dell’inverter
I condensatori elettrolitici e circuito stampato e parti in plastica se bruciati possono produrre gas
nocivi.Per favore trattare come smaltimento rifiuti industriali speciali pericolosi
segue
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 7
Descrizione
No.
Tipo
14
Normalmente è preferibile l’uso di motore asincrono a 4 polarità (1500 rpm sincroni)
Uasare motore asincrono a induzione a gabbia di scoiattolo o motore sincrono a magnete permanente
Selezionare l’inverter in funzione della corrente nominale del motore.
La ventola di raffreddamento del motore è normalmente coassiale calettato sull’albero posteriore,
quindi l’effetto di raffreddamento si riduce con la velocità di rotazione e il motore potrebbe subire
Scelta e applicazione del
surriscaldamenti in funzione del tipo di carico. Se si prevede questo problema, installare una
motore
ventilazione assistita sul motore.
L’inverter è predisposto con parametri standard riferiti ad un tipo di motore di potenza eguale a
quella dell’inverter. Se ci sono differenze occorre ritarare i parametri stessi e i valori di protezione;
Se si ha un cortocircuito del cavo di collegamento o del motore, si attiverà un allarme. Pertanto ,in
primo luogo eseguire il test di isolamento del cavo e del motore, ma disconnettere cavi e motore
dall’inverter prima della prova.
15
Presenza condensatori
di rifasamento sul
motore
Non alimentare mai con l’inverter motori che abbiamo a bordo condensatori per il rifasamento.
L’inverter verrebbe gravemente danneggiato.
16
Altro
1.Non collegare mai l’alimentazione CA sull’uscita dell’inverter terminali (U, V, W).
2.Fissare correttamente e bloccare il pannello primadell’ accensione, in modo da evitare di danneggiare la sicurezza personale a causa dei condensatori presenti internamente.
3.Non effettuare collegamenti, o controlli e altre operazioni dopo l’accensione.
4.Non toccare la scheda di circuito interno e le sue componenti, al fine di evitare il rischio di
scosse elettriche quando questa unità è alimentata,
5.Non toccare il circuito interno e tutte le parti dopo spegnimento fino a quando spia della tastiera
si spegne, è necessario utilizzare un multimetro per verificare che il condensatore interno è stato
scaricato completamente, altrimenti si corre il rischio di scosse elettriche.
6.L’elettricità statica del corpo umano può danneggiare seriamente i componenti MOS interni
,transistor ad effetto di campo, ecc, se non ci sono le misure anti-statiche, non toccare il circuito
stampato e il dispositivo interno IGBT con la mano, altrimenti si potrebbe causare un malfunzionamento.
7.Il morsetto di terra dell’inverter (E o) deve essere messo a terra saldamente secondo le disposizioni nazionali per la sicurezza elettrica e di altre norme pertinenti. Non togliere tensione di
alimentazione fino a quando non avviene l’arresto del motore.
8.Se necessario aggiungere un filtro di ingresso opzionale in modo da soddisfare le norme CE.
17
Presenza condensatori
di carichi rigenerativi
Se il motore comanda carichi rigenerativi inerziali tipo ventilatori o volani, che in caso di arresto
per mancanza di tensione o con rampe di deceerlazione troppo brevi, possono generare corrente in
ingresso all’inverter lato motore, questo può causare gravi danni all’inverter.
Inserire la funzione di riaggancio al volo ( F3.01) e impostare rampe di decelerazione adeguate.
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 8
1-5.
Ulteriori precauzioni di Sicurezza per l’Operatore
• Non collegare mai l’alimentazione A.C. ai terminali d’uscita (U, V, W) dell’inverter
• Fissare e bloccare il pannello anteriore prima di dare tensione per evitare pericoli causati dalla presenza di condensatori carichi o da altri componenti in tensione all’interno dell’inverter.
• Dopo aver dato l’alimentazione, non eseguire cablaggi o controlli ecc…
• Non toccare le schede del circuito o le sue parti o componenti all’interno dell’inverter quando è alimentato, in modo da evitare il pericolo di shock elettrico.
• Se l’alimentazione è spenta, non toccare il PCB o altre parti all’interno dell’inverter prima di 5 minuti
dopo che la spia di segnalazione di condensatori carichi sulla tastiera si è spenta. Controllare con un
multimetro che tute le capacità siano scariche prima di accedere ai componenti interni di qualsiasi tipo
– rischio di shock elettrico.
• L’elettricità statica nel corpo umano può causare gravi danni al transistor ad effetto campo MOS nell’inverter. Si prega di tenere le mani lontane dal PCB, IGBT e altre parti interne prima di aver preso delle
precauzioni per evitare l’elettricità statica. Altrimenti si potrebbero avere dei guasti.
• Durante l’uso, il terminale di messa a terra (E o ) dell’inverter deve essere collegato correttamente alla
terra secondo le specifiche di sicurezza elettrica nazionali e altri standard applicabili.
• Si prega di non spegnere l’unità togliendo l’alimentazione. Agire sul contatto di arresto e togliere l’alimentazione solo dopo che il motore si è fermato a fine rampa di decelerazione.
• Seguire lo standard CE inserendo il filtro EMI ove richiesto.
•
•
Solo il personale addetto è autorizzato all’utilizzo della presente unità. Tale personale
è tenuto a leggere l’intero manuale, relativo a sicurezza, installazione, messa in
opera e manutenzione, prima dell’utilizzo dell’unità stessa. L’utilizzo sicuro della
presente unità dipende da un corretto trasporto, installazione, messa in opera e
manutenzione.
1-6.
Avvertenze per lo smaltimento
L’inverter deve essere smaltito come rifiuto industriale pericoloso, secondo i Regolamenti e le Normative
locali
Attenzione
Rischio di esplosione in caso di incenerimento per la presenza di liquido contenuto nei condensatori che
si espande con il calore.
Rischio di emissione di sostanze pericolose in caso di incenerimento della plastica presente nella struttura
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 9
1-7. Conformità alle Direttive
EMC-2014/30/CE - Compatibilità elettromagnetica
Norma EN61800-3
L’inverter ha la marchiatura CE e risponde alla Direttiva di Compatibilità elettromagnetica se dotato di filtro
EMI anche incorporato - IEC/EN60939
Direttiva Materiale Elettrico in Bassa Tensione 2014/35/CE
L’inverter è marchiato CE in accordo a quanto previsto dallo standard EN50178 (equipaggiamenti elettrici
destinati ad installazioni di potenza) - livello 2-5.2.15.2 - classe sovratensione 3
Direttiva 2006/42/CE del 17 maggio 2006 ( direttiva macchine)
Sono esclusi dal campo di applicazione della presente Direttiva:…(omissis) k) i prodotti elettrici ed elettronici che rientrano nelle categorie seguenti, purché siano oggetto della direttiva 72/23/CEE del Consiglio,
del 19 febbraio 1973, concernente il ravvicinamento delle legislazioni degli Stati membri relative al materiale elettrico destinato ad essere adoperato entro taluni limiti di tensione (3): …( omissis ) — apparecchiature di collegamento e di controllo a bassa tensione.
Gli inverter sono quindi esclusi dalla presente direttiva e sono soggetti alla Direttiva Bassa Tensione.
Gli inverter VFR9000 hanno il marchio CE conforme alla Direttiva Bassa Tensione. Il marchio CE è valido
anche per la direttiva EMC a condizione siano presenti opportuni filtri e la installazione sia corretta.
L’inverter può essere considerato una quasi macchina.
E’ compito del Utilizzatore che incorpora l’inverter in una macchina o in una quasi macchina, garantire la
rispondenza del prodotto finale alla presente Direttiva ed emettere la relativa Dichiarazione di Conformità.
L’inverter quindi non deve essere messo in servizio finchè la macchina o la quasi macchina in cui è incorporato, non sono stati dichiarati conformi, se del caso, alle disposizioni della presente Direttiva.
Torino 01/02/2010
Rimor srl
Dott.ing.Enrico Avonto ( Presidente)
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 10
2.0
Istallazione & Circuito di Standby
2-1.
Condizioni d’Uso
1. Temperatura ambiente -10ºC~40ºC – temperatura immagazzinamento -20°C//+65°C
2. Evitare interferenza elettromagnetica e tenere l’unità lontano dalla sorgente d’interferenza.
3. Evitare la penetrazione di acqua, vapore, polvere, fibre di cotone o polvere di metallo fine .
4. Evitare la penetrazione di olio, sale e gas corrosivi
5. Evitare vibrazioni.
6. Evitare temperature oltre quelle prescitte ed umidità relative superiori al 90% senza formazione di
condensa ed evitare di esporre l’unità alle intemperie.
7. Proibirne l’uso in ambienti pericolosi dove ci sono gas, liquidi o solidi infiammabili o combustibili o
esplosivi.
Modello inverter
Tensione di
ingresso (kW)
Potenza
Corrente input
di output
nominale (A)
nominale (kW)
Corrente
output
nominale (A)
Motore
compatibile
Modello
struttura
VFR9100-0R4G1
0.4
5.4
2.5
0.4
9S2
VFR9100-0R7G1
0.75
8.2
4
0.75
9S2
1.5
14
7
1.5
9S2
2.2
23
10
2.2
9S3
VFR9100-004G1
4.0
35
16
4.0
9S3
VFR9200-5R5G1
5.5
50
25
5.5
9L1
VFR9100-0R4G2
0.4
3.4
2.5
0.4
9S2
VFR9100-0R7G2
0.75
5
4
0.75
9S2
VFR9100-1R5G2
1.5
5.8
7
1.5
9S2
VFR9100-2R2G2
2.2
10.5
10
2.2
9S3
VFR9100-004G2
4.0
14.6
16
4.0
9S3
VFR9200-5R5G2
5.5
26
25
5.5
9L1
VFR9200-7R5G2
7.5
35
32
7.5
9L1
11
46.5
45
11
9L1
15.0
62
60
15.0
9L2
VFR9200-018G2
18.5
76
75
18.5
9L2
VFR9200-022G2
22.0
91
90
22.0
9L3
VFR9200-030G2
30.0
112.0
110
30.0
9L3
VFR9200-037G2
37.0
157
152
37.0
9L3
VFR9200-045G2
45.0
180
176
45.0
9L4
VFR9200-055G2
55.0
214
210
55.0
9L4
VFR9200-075G2
75
307
304
75
9L4
VFR9100-1R5G1
VFR9100-2R2G1
VFR9200-011G2
VFR9200-015G2
1-phase 220V
±10%
3-phase 220V
±10%
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 11
Modello inverter
Tensione di
ingresso (kW)
Potenza
Corrente input
di output
nominale (A)
nominale (kW)
Corrente
output
nominale (A)
Motore
compatibile
Modello
struttura
VFR9100-0R7G3
0.75
3.4
2.1
0.75
9S2
VFR9100-1R5G3
1.5
5.0
3.8
1.5
9S2
VFR9100-2R2G3
2.2
5.8
5.1
2.2
9S2
VFR9100-004G3
4.0
10.5
9
4.0
9S3
VFR9100-5R5G3
5.5
14.6
13
5.5
9S3
VFR9100-7R5G3
7.5
20.5
17
7.5
9S4
VFR9200-011G3
VFR9200-011F3
VFR9200-015F3
11/11/15
26/26/35
25/25/32
11/11/15
9L1/9L1/9L1
15/18.5
35/38.5
32/37
15/18.5
9L1/9L1
18.5/22
38.5/46.5
37/45
18.5/22
9L2/9L2
VFR9200-022G3
VFR9200-030F3
22/30
46.5/62
45/60
22/30
9L2/9L2
VFR9200-030G3
VFR9200-037F3
30/37
62/76
60/75
30/37
9L3/9L3
VFR9200-037G3
VFR9200-045F3
37/45
76/91
75/93
37/45
9L3/9L3
VFR9200-045G3
VFR9200-055F3
45/55
91/112
93/110
45/55
9L4/9L4
VFR9200-055G3
VFR9200-075F3
55/75
112/157
110/150
55/75
9L4/9L4
VFR9200-075G3
VFR9200-093F3
75/93
157/180
150/176
75/93
9L4/9L4
VFR9200-093G3
VFR9200-110F3
93/110
180/214
176/210
93/110
9L5/9L5
110/132
214/256
210/253
110/132
9L5/9L5
VFR9200-132G3
VFR9200-160F3
132/160
256/307
253/304
132/160
9L6/9L6
VFR9200-160G3
VFR9200-187F3
160/187
307/345
304/340
160/187
9L6/9L6
VFR9200-015G3
VFR9200-018F3
VFR9200-018G3
VFR9200-022F3
VFR9200-110G3
VFR9200-132F3
3-phase 380V
±10%
3-phase 380V
±10%
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 12
Modello inverter
Tensione di
ingresso (kW)
Potenza
Corrente input
di output
nominale (A)
nominale (kW)
Corrente
output
nominale (A)
Motore
compatibile
Modello
struttura
VFR9100-0R7G4
3.4
2.1
0.75
9S2
VFR9100-1R5G4
1.5
5.0
3.8
1.5
9S2
VFR9100-2R2G4
2.2
5.8
5.1
2.2
9S2
VFR9100-004G4
4.0
10.5
9
4.0
9S3
VFR9100-5R5G4
5.5
14.6
13
5.5
9S3/9S3
VFR9100-7R5G4
7.5
20.5
17
7.5
9S4/9S4
VFR9200-011G4
VFR9200-011F4
VFR9200-015F4
11/11/15
26/26/35
25/25/32
11/11/15
9L1/9L1/9L1
VFR9200-015G4
VFR9200-018F4
15/18.5
35/38.5
32/37
15/18.5
9L1/9L1
VFR9200-018G4
VFR9200-022F4
18.5/22
38.5/46.5
37/45
18.5/22
9L2/9L2
VFR9200-022G4
VFR9200-030F4
22/30
46.5/62
45/60
22/30
9L2/9L2
30/37
62/76
60/75
30/37
9L3/9L3
VFR9200-037G4
VFR9200-045F4
37/45
76/91
75/93
37/45
9L3/9L3
VFR9200-045G4
VFR9200-055F4
45/55
91/112
93/110
45/55
9L4/9L4
VFR9200-055G4
VFR9200-075F4
55/75
112/157
110/150
55/75
9L4/9L4
VFR9200-075G4
VFR9200-093F4
75/93
157/180
150/176
75/93
9L4/9L4
VFR9200-093G4
VFR9200-110F4
93/110
180/214
176/210
93/110
9L5/9L5
VFR9200-110G4
VFR9200-132F4
110/132
214/256
210/253
110/132
9L5/9L5
VFR9200-132G4
VFR9200-160F4
132/160
256/307
253/304
132/160
9L6/9L6
VFR9200-160G4
VFR9200-187F4
160/187
307/345
304/340
160/187
9L6/9L6
VFR9200-055G6
VFR9200-075F6
55/75
70/93
62/85
55/75
9L4/9L4
75/93
93/105
85/102
75/93
9L4/9L4
VFR9200-093G6
VFR9200-110F6
93/110
105/130
102/125
93/110
9L5/9L5
VFR9200-110G6
VFR9200-132F6
110/132
130/170
125/150
110/132
9L5/9L5
132/160
170/200
150/175
132/160
9L6/9L6
160/187
200/210
175/198
160/187
9L6/9L6
VFR9200-030G4
VFR9200-037F4
VFR9200-075G6
VFR9200-093F6
VFR9200-132G6
VFR9200-160F6
VFR9200-160G6
VFR9200-187F6
3-phase 480V
±10% 0.75
3-phase 690V
±10%
3-phase 690V
±10%
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 13
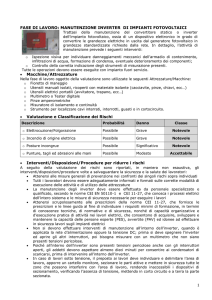
2-2.Istallazione
L’invertitore di frequenza deve essere montato su piastra metallica piana in posizione verticale, in un ambiente chiuso con adeguata ventilazione, con sufficiente spazio lasciato tra esso e gli oggetti adiacenti o
pareti che lo circondano, come mostrato nella figura sotto:
Uscita aria
150mm o più
50mm
o più
Uscita aria
Direzione aria
50mm
o più
WARNING
Ingresso aria
150mm o più
Ingresso aria
2-2.1Dimensionale
Copertura superiore
Copertura rimovibile
Ingresso cavi
Ingresso aria
Tastierino
Posizione di montaggio
guarnizione di tenuta
(optional)
Fori di fissaggio
Targhetta identificativa
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 14
2-2.2 VFR9100 series
1.
9S2 to 9S4
1)
l
9S2
W
b
H
a
L
d
d
Power
supply Type
level
Power
(kW)
1phase
220V
G
0.4 to 1.5
3phase
220V
G
0.4 to 1.5
3phase
380V
G
0.75 to 2.2
Dimensions
L
W
H
185
120
178.5
Installation size
a
b
d
174 108 Ø5.3
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 15
2)
9S3
W
b
H
a
L
d
d
Power
supply Type
level
Power
(kW)
Dimensions
L
1phase
220V
G
2.2 to 4.0
3phase
220V
G
2.2 to 4.0 220
3phase
380V
F
5.5
G
4.0 to 5.5
W
H
150
185.5
Installation size
a
b
d
209 138 Ø5.3
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 16
3)
9S4
W
b
H
a
L
d
d
Power
supply Type
level
3phase
380V
Power
(kW)
F
7.5
G
7.5
Dimensions
L
W
H
285
180
200
Installation size
a
b
d
272 167 Ø5.5
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 17
2-2.3 VFR9200 series
2.
9L1 to 9L6
1)
d
H
a
L
W
b
9L1
Power
supply Type
level
1phase
220V
G
Dimensions
Installation size
Base
No.
L
W
H
a
9L1
360
220
210
340
b
d
5.5
3F
phase
G
380V
2)
9L2
11 to 18.5
150 Ø10
11 to 15
Power
supply Type
level
3phase
380V
Power
(kW)
Power
(kW)
F
22 to 30
G
18.5 to 22
Dimensions
Base
No.
L
W
H
9L2
435
225
242
Installation size
a
b
d
415 165 Ø10
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 18
3)
9L3
Power
supply Type
level
3phase
380V
F
37 to 45
G
30 to 37
4)
9L4
Power
supply Type
level
3phase
380V
5)
Power
(kW)
F
55 to 93
G
45 to 75
Base No.
9L3
Base No.
9L4
Dimensions
L
480
W
Installation size
H
296 246
Dimensions
a
b
d
460 200 Ø10
Installation size
L
W
H
a
660
364
280
640
b
d
250 Ø10
9L5
Power
supply Type
level
3phase
380V
6)
Power
(kW)
Power
(kW)
F
110 to 132
G
93 to 110
Base No.
9L5
Dimensions
L
W
H
710
453
280
Installation size
a
b
d
690 350 Ø10
9L6
Power
supply Type
level
3phase
380V
Power
(kW)
F
160 to 187
G
132 to 160
Base No.
9L6
Dimensions
L
W
910 480
H
323
Installation size
a
b
d
890 350 Ø10
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 19
2-3.Cablaggio
Il cablaggio dell’invertitore di frequenza include due parti: circuito principale e circuito di controllo. L’utente
deve assicurare i corretti collegamenti secondo il seguente schema dei collegamenti
2.4-1
Wiring diagram(< 11kW)
Main Circuit
Control Circuit
Note - la versione software C3.00 e superiore ha la funzione J16.
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 20
2.4-2
Wiring diagram (11kW to 15kW)
Main Circuit
Control Circuit
Note - la versione software C3.00 e superiore ha la funzione J16.
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 21
2.4-3
Wiring diagram(18.5kW to 355kW)
Main Circuit
Control Circuit
Note - la versione software C3.00 e superiore ha la funzione J16.
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 22
2.5
Morsettiera di Alimentazione (G type)
2.5-1
VFR9000 Morsettiera di alimentazione
1) Morsettiera (<15KW, 380V)
R/L1 S/L2 T/L3
P
P+
RB
U/T 1 V/T 2
-------- Rete 3f -------- -----Filtro DC-----
W/T3
E
Terminale
di terra
----------Motore--------
Resistenza
di frenatura
2) Morsettiera(18.5kW a 355kW, 380V)(sinistra ingresso, destra uscita)
P
P+
P-
R
P/P+: Induttanza DC
P+/P-: Res.Frenatura
S
T
-------- Rete 3f --------
U/T1 V/T2
W /T3
E
Terminale
di terra
----------Motore--------
3) Morsettiera (45kW to 220kW, 380V)( Alto ingresso, Basso uscita)
Alimentazione
Rete Trifase
R/L1
P
P+
P/P+: Induttanza DC
P+/P-: Res.Frenatura
P-
S/L2
U/T1
T/L3
V/T2
W/T3
/E
Terminale
di terra
----------Motore--------
Nota: P / P + è configurazione standard per lo stato in corto; se l’induttanza interna DC è collegata, in
primo luogo scollegarla e poi ricollegarla.
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 23
2.5-2
Descrizione dei terminali del circuito principale
Terminali
R/L1
S/L2
Nome
Descrizione
Terminali di ingresso
Collegare alla rete elettrica trifase, monofase si collega a R
/L3
T
E
Terminale di terra
Collegare a terra
P+, RB
Terminali res. di frenatura
Collegare alle resistenze di frenatura
Terminali di uscita
Collegare il motore trifase T
P+, P-
Terminali di uscita bus DC
Collegare alla unità di frenatura
P, P+
Terminali induttanza DC
Collegare alla induttanza DC (rimuovere il ponticello)
2.6
2.6-1
Morsetti del circuito di controllo
Descrizione dei morsetti del circuito di controllo
U/T1
V/T2
W/T3
Categoria
Alimentazione Principale
Simbolo
Nome
Funzione
+10V- GND
+10V Per alimentazione esterna
Uscita + 10V di alimentazione, corrente di uscita
massima: 10mAGeneralmente viene utilizzata come
alimentazione potenziometro esterno, potenziometro
gamma di resistenza: 1kΩ / 5kΩ
+24V- COM
+24V Per alimentazione esterna
Uscita + 24V, generalmente viene utilizzata come
alimentatore di terminali di ingresso e di uscita digitali
e sensori esterni. Corrente di uscita massima: 200 mA
PLC
Terminale di ingresso
Alimentazione esterna
Quando il segnale esterno viene utilizzato, si prega
di togliere i ponticelli J5, PLC deve essere collegato
all’alimentazione elettrica esterna a + 24V (impostazione predefinita).
Ingresso Analogico Terminale 1
1.Ingresso: (DC 0 V a 10 V / 0 a 20mA), dipende dal
ponticello J3 selezionato sul pannello di controllo.
2.Impedenza di ingresso: 22kΩ con ingresso in
tensione, 500Ω con ingresso in corrente.
AI2-GND
Ingresso Analogico Terminale 2
1.Ingresso: (DC 0 V a 10 V / 0 a 20mA), dipende dal
ponticello J4 selezionato sul pannello di controllo.
2.Impedenza di ingresso: 22kΩ con ingresso in
tensione, 500Ω con ingresso in corrente.
DI1
Ingresso digitale 1
DI2
Ingresso digitale 2
DI3
Ingresso digitale 3
DI4
Ingresso digitale 4
DI5
Ingresso digitale 5
DI6
Ingresso digitale 6
DI7
Ingresso digitale 7
DI8
Ingresso digitale 8
DI5
Ingresso per segnali impulsivi
veloci
AI1-GND
Ingressi Analogici
Ingressi digitali
1.Opto-isolatore, compatibile con ingresso bipolare
2.Impedenza di ingresso: 2.4kΩ
3.Range tensione di ingresso: 9V a 30V
4.Sotto i 11KW: (da DI1 a DI6) modalità è controllata
da J5, quando l’alimentazione esterna è usata, si
prega di scollegare jumper J5,
5.Sopra i 11KW: (da DI1 a DI4) modalità è controllata
da J6, (DI5 a DI8) modalità è controllata da J5,
quando l’alimentazione esterna è usata, scollegare
jumper J5
Esclusi DI1 a DI4, DI6 a DI8, DI5 può essere utilizzato
anche come ingresso alta velocità di impulsi.
Frequenza massima ingresso:100kHz
segue
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 24
Uscita Analogica 1
La selezione di J2 sul pannello di controllo determina
uscita in tensione o corrente.
Gamma di tensione di uscita: 0 V a 10 V, campo di
corrente d’uscita: 0 mA a 20 mA
DA2- GND
Uscita Analogica 2
La selezione di J1 sul pannello di controllo determina
uscita in tensione o corrente.
Gamma di tensione di uscita: 0 V a 10 V, campo di
corrente d’uscita: 0 mA a 20 mA
SPA-COM
Uscita Digitale 1
SPB-COM
Uscita Digitale 2
DA1- GND
Uscite analogiche
Uscite digitali
Uscite a Relè
Interfaccia ausiliare
2.6-2
Opto-isolatore bipolare, uscita open collector Gamma
tensione di uscita: 0V to 24V , campo di corrente
d’uscita: 0mA to 50mA
Soggetta alla funzione (F2.00)”SPB selezione uscita
modo terminale”.
Come uscita ad alta velocità,frequenza
massima:100kHz;
SPB-COM
Uscita Digitale Impulsi veloci
T/A1- T/C1
T/B1- T/C1
Contatto NO Normalmente aperto Corrente massima: Contatti NC 5A/AC 250Vx Contatti
Contatto NC Normalmente chiuso NO 3 A/AC 250Vx1A/ DC 30V, COSø = 0.4.
J12
Scheda seriale 485
Connettore 26-pin
J13
Scheda interfaccia PG
Connettore 12-pin
Disposizione dei morsetti del circuito di controllo
1. 9KLCB Morsetti scheda di controllo
1. 9KSCB Morsetti scheda di controllo
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 25
2.7
Precauzioni per il cablaggio
Pericolo
Assicurarsi che l’interruttore di alimentazione si trova nello stato OFF prima procedere al cablaggio,
pericolo di scossa elettrica!
Il cablaggio deve essere eseguito da personale qualificato, in caso contrario si possono causare danni
alle attrezzature e lesioni personali!
Deve essere posto correttamente a terra, altrimenti sussiste il pericolo di scossa elettrica o di incendio!
Note
Assicurarsi che la potenza in ingresso sia coerente con il valore nominale dell’inverter, in caso contrario
si può causare danni all’inverter!
Assicurarsi che i dati del motore corrispondano a quelli dell’inverter, in caso contrario si può causare
danni al motore o attivare la protezione dell’inverter!
Non collegare l’alimentazione ai terminali U / T1, V / T2 W / T3, altrimenti si possono causare danni
all’inverter!
Non collegare direttamente la resistenza di frenatura al bus CC terminali (P), (P +), altrimenti possono
causare un incendio!
• Non installare condensatori o filtri RC sui terminali U,V,W
• Togliere la tensione di alimentazione dell’inverter quando si collega un motore.
• Non lasciare parti metalliche o pezzi di filo durante il cablaggio, altrimenti si può causare il danneggiamento
e malfunzionamento dell’inverter.
• Disconnettere il motore o aprire l’interruttore di alimentazione solo quando l’inverter è in stop.
• Per minimizzare gli effetti dell’interferenza elettromagnetica, si raccomanda di installare un filtro per ridurre
i picchi, quando il contattore elettromagnetico e il relè sono vicino dall’inverter.
• I cavi esterni collegati all’inverter devo avere dei dispositivi di isolamento o cavi schermati.
• I cavi dei segnali di ingresso devono essere schermati e posti distanti dai cavi di alimentazione.
• Se la frequenza di trasporto (Carrier Frequency) è inferiore a 3KHz, la massima distanza del motore è 50mt;
se la frequenza di trasporto è superiore a 4KHz, la distanza deve essere ridotta in modo appropriato, il modo
migliore è far passare i cavi del motore in tubo metallico.
• Nel caso si debbano applicare filtri, reattanze, ecc..., per prima cosa misurare la loro resistenza di isolamento dalla terra usando un Megger con 1000Volt, assicurandosi che il valore misurato non sia inferiore a
4megaohms.
• Nel caso in cui l’inverter viene usato con start e stop frequenti, non usare l’interuttore di alimentazione ma
operare tramite la tastiera, i terminali di controllo o la seriale RS485, altrimenti l’inverter può essere danneggiato nella parte che riguarda il ponte DC.
• Non collegare mai la tensione di alimentazione ai terminali U,V,W.
• Per prevenire incidenti assicurarsi del corretto collegamento del terminale di terra, l’impedenza misurata
deve essere meno di 10 ohms, altrimenti si avranno dispersioni di corrente.
• Le specifiche dei cavi usati per il collegamento dell’inverter devono soddisfare le nome previste dall’ente
nazionale.
• La potenza del motore deve essere uguale o inferiore alle caratteristiche dell’inverter.
•
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 26
2.8
Circuito di By-pass
Quandonell’invertersiverificaunguasto,questocausaunagrandeperditaditempodiinattività.Perevitare
questocasoaccada,sipuòinstallareuncircuitodiriservapergarantirelalacontinuitàdelservizio.
Nota:lecaratteristichedelcircuitodiby-passdevonoessereconfermatietestatiinprecedenza,elasua
potenzaafrequenzadeveessereinaccordoconlasequenzadifasedell’inverter
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 27
3.0
Tastiera di controllo
Descrizione Tastiera
JP6E9100 Tastiera di controllo
JPR6E9100 Tastiera di controllo
NOTE: la lettera “R” nella sigla “JPR6E9100” si intende come tastiera con MCU.
Figura 3.0-1 Descrizione delle funzioni
Spie di stato
Nome
RUN
Led funzionamento
* ON: inverter in funzione
* OFF: inverter in stop
LOCALE/REMOTO
Led di comando Questa è l’indicazione per operazioni da tastiera,terminale e
remoto (controllo della comunicazione)
* ON: controllo da terminale
* OFF: controllo da tastiera
* Lampeggiante: controllo da remoto
FWD/REV
Led comando avanti/indietro
* ON: Avanti
* OFF: Indietro
TUNE/TC
Led stato Impostazione o Allarme
* ON: in modalità di controllo di coppia
* Lampeggio lento: stato di tunning del motore
* Lampeggio veloce: in stato di anomalia
Unità di misura
Stato led
HzAV
Hz
Frequenza
A
Corrente
V
Tensione
RPM
Velocità
%
Percentuale
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 28
3.2
Tasto
Descrizione delle funzioni
Nome
Funzione
Set Parametri o Tasto Esc
•Entrata nel menu pricipale per modifiche
•Esc dalla modifica di un parametro funzione
•Esc da submenu o menu funzione a menu di stato
Tasto Shift
•Scelta del parametro visualizzato circolarmente o stop interfaccia
•Scelta della posizione del cursore durante la modifica parametri.
Tasto aumento
Aumento del numero parametro o funzione
Multi-funzione def. tasto 13
Tasto su settato dal parametro F6.18
Tasto diminuisce
Diminuzione del numero parametro o funzione
Multi-funzione def. tasto 23
Tasto giù settato dal parametro F6.19
Tasto Start
Per Start rotazione motore quando il controllo è da tastiera
Tasto Stop/Reset
*Per fermare il motore quando l’inverter è in Run; per resettare lo stato di allarme La
funzione del tasto è subordinato a F6.00
Tasto Enter
* Accesso a un livello del menu a schermo,conferma di valore cambiato.
Potenziometro
* F0.03 è settato su 4, il potenziometro è usato per settare la frequenza di lavoro.
Encoder3
* Nello stato di richiesta, funzione parametro crescente o decrescente * Nello stato
di modifica, il parametro della funzione o posizione da modificare, aumentano o
diminuiscono * Nello stato di controllo, aumenta o diminuisce la frequenza di lavoro
Nota:“Italico³” significa software è versione C3.00 e solo la tastiera con MCU può usare questa funzione, MCU =Micro Controller Unit .
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 29
3.2-1
Descrizione delle funzioni
Accensione
–– Power-on
Istruzioni per la visualizzazione e la
modifica
dei codici funzione
Accensione
Power-on
VFR9000 –il menù di programmazione parametri è suddiviso in tre livelli:
Gruppo parametri funzione (livello 1)→codice funzione(livello 2)→codice funzione(livello 3)
Settaggio (livello 3). Le operazioni sono le seguenti:
Spegnere visualizzazione
visualizzazione parametri
parametri
Spegnere
Accensione – Power-on
PRG
PRG
PRG
PRG
Spegnere visualizzazione parametri
Cambio
Cambio gruppo
gruppo
parametri
parametri
PRG
Visualizza menu
menu 1°
1° livello
livello
Visualizza
PRG
Cambio gruppo
parametri
Visualizza menu 1° livello
PRG
PRG
ENTER
ENTER
Selezione
cambio
Selezione cambio
parametri
parametri
funzione
funzione
ENTER
PRG
Visualizza menu
menu 2°
2° livello
livello
Selezione cambio
Visualizza
parametri
ENTER
ENTER
Cambio valore
valore funzione
Cambio
parametri
ENTER
parametri
ENTER
funzione
Visualizza
menu 2° livello
PRG
funzione
PRG
ENTER
Cambio valore
Visualizza menu
menu 3°
3° livello
livello
Visualizza
parametri
ENTER
funzione
PRG
Figura
di
processo
Figura 3.0-2
3.0-2 Stato
Stato Display
Display ee operazioni
operazioni
di
processo
Visualizza menu 3° livello
Figura 3.0-2 Stato Display e operazioni di processo
Descrizione: Indietro al livello 2 del menu dal livello 3 con il pulsante PRG o tasto ENTER nel livello 3.
Differenze tra i due tasti : ENTER porta indietro al livello 2 nello stesso momento salva il valore del parametro,
e porta alla successiva funzione in modo automatico; PRG porta indietro al livello 2 direttamente senza
salvare il valore della funzione, tornando indietro alla attuale funzione.
Esempio 1: reset ai parametri originali di fabbrica
Press
Press
PRG
PRG
Press
Press
ENTER
ENTER
Press
PRG
Press
ENTER
Press
Press
ENTER
ENTER
Press
Press
Press PRG
PRG
Press PRG
Press
Press
PRG
PRG
Press
PRG
Press
Press
ENTER
ENTER
Per
Per
conferma
conferma
ENTER
Press
ENTER
Per
conferma
Lampeggio
Lampeggio
Lampeggio
Esempio 2 :cambiare F0.01 da 50.00Hz a 40.00Hz
Il valore della funzione visualizzata al livello 3 del menu non può essere cambiata se non
è lampeggiante. Le ragioni possono essere le seguenti:
Press
Press
Press
Press
Press
Press
ENTER
ENTER
PRG
ENTER
PRG
PRG
Press
Press Press
ENTER
ENTER
ENTER
Press PRG
PRG Press PRG
Press
Press
Press
ENTER
ENTER
Per
Per
conferma
conferma
Press
ENTER
Per
conferma
Lampeggio
Lampeggio
Lampeggio
1. La funzione non può essere modificata se attualmente in uso.
2. La funzione non può essere modificata se in stato di run. Può essere modificata solo in stato di stop.
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 30
3.3
Programmazione delle funzioni più comunemente usate
Selezione
Parameteri
Motore
b0.00: Selezione Tipo
b0.01: Potenza Kw
b0.02: Tensione nominale V
b0.03: Corrente nominale A
b0.04: Frequenza nominale Hz
b0.05: Velocità RPM
b0.35 : Numero coppie polari
Funzioni base
F0.03:Controllo principale della frequenza
F0.11:Selezione del commando di funzionamento
F0.13: Tempo di accelerazione
F0.14: Tempo di decelerazione
F0.15: Unità di Tempo per acc/dec
F0.03
0 = Tastiera
1 = Tastiera con memoria
2 = Ingresso Analogico AI1
3 = Ingresso Analogico AI2
4 = Potenziometro sul pannello
5 = impulsi ad alta velocità
6 = Operazioni multi velocità
7 = Semplice programma PLC
8 = Controllo da PID
9 = Comunicazione remota Modbus
F0.11
0 = Controllo da Tastiera
1 = Controllo da morsettiera
2 = Controllo da Modbus
3 = Controllo da Tastiera + Modbus
4 = Controllo da Tastiera + Modbus + morsettiera
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 31
4.0
Esempi di programmazione
4.0-1 Set tempo accelerazione e decelerazione
Parametri principali:
F0.13 → set tempo di accelerazione
F0.14 → set tempo di decelerazione
F0.15 → set unità di tempo
Impostazione
•Premere PRG
•Premere frecce su/giù fino a visualizzare F0.00
•Premere ENTER
•Premere freccia su fino a visualizzare F0.13(Tempo di accelerazione), premere ENTER
•Viene visualizzato il tempo impostato, con le frecce su e giù impostare il nuovo valore e premere ENTER
per memorizzare.
•Il display visualizza ora il parametro successivo F0.14(Tempo di decelerazione), premere nuovamente
ENTER
•Viene visualizzato il tempo impostato, con le frecce su e giù impostare il nuovo valore e premere ENTER
per memorizzare.
•Il display visualizza ora il parametro successivo F0.15(Unità di Tempo),premere nuovamente ENTER
•F0.15= 0 (1sec.); F0.15= 1 (0,1sec.); F0.15= 2 (0,01sec.)
•con le frecce su e giù impostare il nuovo valore e premere ENTER per memorizzare.
•Al termine premere due volte PRG per uscire dal modo programmazione.
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 32
4.0-2 Programmazione Ingressi e Uscite digitali
Schema di collegamento PI9000 (< 11kW)
INGRESSI: funzione F1
Nella programmazione gli ingressi vanno abilitati, essendo
questi usati come comando esterno di marcia FWD-REV o
incremento/decremento della frequenza di lavoro.
Per abilitare l’uso degli ingressi(DI1…DI8) occorre settare il
parametro F0.11=1
questo comporta l’esclusione del comando start da tastiera.
Abilitati gli ingressi occorre definire che lavoro devono fare,
questo si ottiene andando a configurarli con le loro funzioni di
riferimento, DI1si configura con la funzione F1.00,DI2 con F1.01
e così via fino all’ingresso DI8 e F1.07.
A pagina 97 del manuale sono elencate tutte le possibili funzioni
impostabili,quindi se si deve utilizzare l’ingresso DI1 come start
FWD si deve porre F1.00= 1.
USCITE: funzione F2
Per impostare l’uso del relè1(TA1,TB1,TC1) occorre impostare
la funzione F2.02,
a pagina 110 del manuale sono descritte tutte le possibili
funzioni che possono essere assegnate alle uscite, ad esempio
se voglio che il relè1 commuti quando l’inverter è in allarme,
bisogna porre F2.02 = 2.
La stessa procedura deve essere usata nel caso si voglia usare
il relè 2 usando la funzione F2.05 per determinarne la funzione.
Main Circuit
Control Circuit
IMPOSTAZIONE
•Premere PRG
•Premere frecce su/giù fino a visualizzare la famiglia della
funzione
•Premere ENTER
•Viene visualizzata la prima funzione della famiglia
•Con i tasti freccia si sceglie la funzione da impostare
•Premendo Enter, viene visualizzato il valore della funzione
•Con i tasti freccia impostare il nuovo valore
•Premere Enter per memorizzare il valore della funzione appena
cambiato
•Al termine premere due volte PRG per uscire dal modo
programmazione.
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 33
4.0-3 Programmazione Ingressi e Uscite Analogiche
Schema di collegamento PI9000 (< 11kW)
INGRESSI: funzione F1
Nella programmazione gli ingressi analogici vanno configurati in
base alle esigenze di uso.
Per abilitare l’uso degli ingressi(AI1,AI2) occorre settare il
parametro F0.03=2 per AI1 e F0.03=3 per AI2.
questo comporta l’esclusione del controllo da tastiera per la
regolazione della frequenza di lavoro.
Abilitati gli ingressi occorre definire la loro configurazione, i set
di default sono 0/10V per AI1 che per AI2, se si vogliono variare
i settaggi da V a mA occorre operare sui jumper J3 e J4(vedi
disegno a lato), per variare i valori min e max operare sulle
loro funzioni di riferimento. La seguente tabella comprende le
funzioni per i set dei due ingressi:
INGRESSO
SET VALORE MIN
SET VALORE MAX
AI1
F1.12= 0.00 V, 0.00mA
F1.14= 10.00 V, 20.00mA
AI2
F1.16= 0.00 V, 0.00mA
F1.18= 10.00 V, 20.00mA
Main Circuit
Control Circuit
USCITE: funzione F2
Per impostare le uscite DA1 e DA2 occorre impostare
rispettivamente le funzioni F2.07 e F2.08, a pagina 113 del
manuale sono descritte tutte le possibili funzioni che possono
essere assegnate alle uscite, ad esempio se voglio che su
DA1 sia disponibile il valore della corrente in uscita all’inverter,
bisogna porre F2.07 = 2.
La stessa procedura deve essere usata nel caso si voglia usare
l’uscita DA2 usando la funzione F2.08 per determinarne la
funzione.
IMPOSTAZIONE
•Premere PRG
•Premere frecce su/giù fino a visualizzare la famiglia della
funzione
•Premere ENTER
•Viene visualizzata la prima funzione della famiglia
•Con i tasti freccia si sceglie la funzione da impostare
•Premendo Enter, viene visualizzato il valore della funzione
•Con i tasti freccia impostare il nuovo valore
•Premere Enter per memorizzare il valore della funzione appena
cambiato
•Al termine premere due volte PRG per uscire dal modo
programmazione.
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 34
4.0-4 Programmazione ingresso AI1 mA per il controllo della velocità mediante un misuratore di
pressione differenziale
Oggetto: controllare la velocità del motore in base ad un segnale
4-20mA.
La velocità base di lavoro richiesta è 40Hz la velocità massima
50Hz.
Vogliamo controllare l’aspirazione in base alla pulizia del filtro,
filtro pulito 40Hz, filtro sporco velocità incrementale costante in
base al segnale del misuratore di pressione fino a 50Hz massimi,
tenendo presente che a 40Hz io avrò un segnale di 5.4mA e con
il filtro completamente intasato 7.5mA.
Schema di collegamento PI9000 (< 11kW)
Main Circuit
Control Circuit
La prima cosa da fare è
controllare il jumper J3 sulla
scheda di controllo che sia
posizionato tra i pin 1 e 2 per
settare l’ingresso AI1 in mA.
Abilitare l’ingresso AI1con il parametro F0.03=2 questo comporta
l’esclusione del controllo da tastiera per la regolazione della
frequenza di lavoro.
Abilitati gli ingressi occorre definire la configurazione dei
seguenti parametri:
F0.03 = 2
F0.19 = 50 Hz frequenza massima
F1.12 = 2.7 (valore che corrisponde ai 5.4mA)
F1.13 = 80 (valore in % del fondo scala 50Hz) 40Hz
F1.14= 3.75 (valore che corrisponde ai 7.5mA)
F1.15 = 100 (valore in % del fondo scala 50Hz) 50Hz
Per settare accuratamente l’inverter occorre controllare con
un milliamperometro la corrente che il misuratore di pressione
genera e cambiare di conseguenza i valori delle funzioni F1.12
per il valore minimo e F1.14 per il valore massimo il tutto riferiti ai
valori di frequenza minimo(F1.13) e massimo(F1.15) impostati.
I valori da dare a F1.12 e F1.14 si ricavano dalla seguente
proporzione:
F1.12: 10v= 5.4mA:20mA F1.12=5.4x10/20 =2.7
F1.14: 10v= 7.5mA:20mA F1.14=7.5x10/20 =3.75
Collegare il segnale in mA del misuratore di pressione all’ingresso
AI1 e GND.
IMPOSTAZIONE:
•Premere PRG
•Premere frecce su/giù fino a visualizzare la famiglia della
funzione
•Premere ENTER
•Viene visualizzata la prima funzione della famiglia
•Con i tasti freccia si sceglie la funzione da impostare
•Premendo Enter, viene visualizzato il valore della funzione
•Con i tasti freccia impostare il nuovo valore
•Premere Enter per memorizzare il valore della funzione appena
cambiato
•Al termine premere due volte PRG per uscire dal modo
programmazione.
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 35
4.0-5 Programmazione start/stop remoto e controllo di velocità da potenziometro
FUNZIONAMENTO
In questa modalità di funzionamento le velocità posso essere
regolate in modo continuo con l’ausilio di un potenziometro
esterno da 1Kohm 2w,il motore viene posto in marcia con un
contatto esterno.
SW1
DI1
Marcia FWD
ON
Parametri principali:
F0.11=1
→ Controllo solo da remoto inverter
F0.03=2
→ Controllo frequenza tramite pot. esterno
collegato all’ingresso AI1
Parametri I/O:
F1.00=1
→ morsetto DI1 comando marcia FWD
Schema di collegamento PI9000 (11kW to 15kW)
Main Circuit
Control Circuit
SW1
SW1 si usa solamente
per la marcia/arresto
del motore
Potenziometro collegato
tra +10v,AI1,GND
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 36
4.0-6 Programmazione start/stop remoto e controllo di velocità con valori pre-impostati
FUNZIONAMENTO
L’inverter può funzionare con comando multi velocità automatico in modo che si porti direttamente alle
velocità impostate V1, V2, V3 e V4.
In questa modalità di funzionamento le velocità non posso essere regolate in modo continuo ma si avranno 3
step discreti le cui velocità devono essere pre-impostate tramite programmazione.
Il funzionamento è descritto dalla tabella seguente:
DI1
DI5
DI6
Marcia V1 FWD
ON
OFF
OFF
Marcia V2 FWD
ON
ON
OFF
Marcia V3 FWD
ON
OFF
ON
Marcia V4 FWD
ON
ON
ON
Parametri principali:
F0.11=1 → Controllo solo da remoto inverter
F0.03=6 → Controllo frequenza tramite multi velocità
Parametri I/O:
F1.00=1 → morsetto DI1 comando marcia FWD
F1.04=12 → morsetto DI5 per multi velocità
F1.05=13 → morsetto DI6 per multi velocità
Parametri Multivelocità:
E1.00=V1 → Impostazione velocità V1, es. 20% = 10 Hz
E1.01=V2 → Impostazione velocità V2, es. 40% = 20 Hz
E1.02=V3 → Impostazione velocità V3, es. 80% = 40 Hz
E1.03=V4 → Impostazione velocità V4, es. 100% = 50 Hz
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 37
Schema di collegamento PI9000 (11kW to 15kW)
Main Circuit
Control Circuit
SW1
SW2
SW3
SW2
SW3
Vel
OFF
OFF
V1
ON
OFF
V2
OFF
ON
V3
ON
ON
V4
SW1 si usa solamente per la
marcia/arresto del motore
Via Luigi Santagata, 43 - 10156 Torino Tel +39 011 2238561 e-mail: [email protected] - www.rimor.eu
pag 38