maxon motor
maxon motor control Servoamplificatore 4-Q-EC DES 70/10
Codice prodotto 228597
Manuale d'istruzioni
Edizione Aprile 2006
Il DES (Servoamplificatore Digitale EC) è un servoamplificatore digitale ad elevate prestazioni con commutazione sinusoidale per il perfetto controllo dei motori EC
(Electronic Commutation).
I motori EC devono essere dotati di sensori Hall e di un
encoder digitale con line driver.
La regolazione, il monitoraggio e tutti gli algoritmi di
controllo sono realizzati mediante un processore digitale
di segnali molto rapido. Inoltre è possibile impostare il
servoamplificatore in maniera molto semplice mediante
dei potenziometri, come avviene normalmente nei sistemi
di controllo tradizionali.
In alternativa è possibile anche una configurazione
attraverso un PC (RS232 oppure CAN), cosa particolarmente vantaggiosa nell’impiego in rete, poiché tutte
le impostazioni ed i parametri possono essere inseriti in
forma numerica in maniera rapida e riproducibile.
L’impostazione dei valori nominali può avvenire in maniera
convenzionale mediante un ingresso analogico
(0 ... 5 V o ± 10 V) oppure mediante un‘interfaccia RS232
o CAN Bus. La commutazione sinusoidale causa minimale
ripple di coppia e bassa rumorosità.
Indice
1
2
3
4
5
6
7
8
9
Norme di sicurezza ..........................................................................................................................................2
Dati tecnici........................................................................................................................................................3
Cablaggio minimo ............................................................................................................................................4
Messa in servizio .............................................................................................................................................5
Descrizione funzionale di ingressi ed uscite ....................................................................................................7
Stati d'esercizio ..............................................................................................................................................15
Installazione conforme alla EMV ...................................................................................................................16
Schema di funzionamento .............................................................................................................................18
Disegno quotato.............................................................................................................................................18
Questa versione aggiornata del manuale d’istruzioni, documentazione aggiuntiva e software del DES 70/10 si trovano sul
sito internet www.maxonmotor.com nella rubrica «Service & Downloads», codice produtto 228597.
Questo documento è valido per la hardware version 4102.
maxon motor
Servoamplificatore 4-Q-EC DES 70/10
1
Manuale d'istruzioni
Norme di sicurezza
Personale qualificato
L’installazione e la messa in funzione devono essere effettuati esclusivamente da personale qualificato adeguatamente istruito.
Disposizioni di legge
L’utilizzatore deve verificare che l’amplificatore e i suoi componenti vengano montati e
connessi rispettando le disposizioni di legge locali.
Disinserire il carico
Alla prima messa in servizio il motore deve funzionare a vuoto, cioè in assenza di carico.
Dispositivi di sicurezza
Le apparecchiature elettroniche non sono di per sé protette contro disfunzioni. Macchine
ed impianti debbono quindi essere dotati di dispositivi di monitoraggio e sicurezza indipendenti. In caso di disfunzione delle apparecchiature, di errata manovra, di disfunzione dell’unità di controllo e di comando, di rottura di cavi ecc., il controllo - ovvero l’intero
impianto - deve portarsi in condizioni di sicurezza.
Riparazioni
Le riparazioni possono essere effettuate soltanto in strutture autorizzate o presso il costruttore. L’apertura impropria e le riparazioni eseguite da personale non specializzato
possono comportare gravi pericoli per l’utilizzatore.
Pericolo di vita
Verificate accuratamente che durante l’installazione del DES 70/10 tutte le parti
dell’impianto coinvolte siano senza corrente!
Dopo l’avviamento non toccate conduttori sotto tensione!
Max. Tensione d’esercizio
La tensione allacciata deve essere compresa tra 24 e 70 VDC. Tensioni superiori a
75 VDC oppure l’inversione delle polarità provocano la distruzione dell’unità.
Corto circuito e messa a terra
L’amplificatore non e protetto da:
Corto circuito ai connettori e connessione a terra o Gnd!
Componenti soggetti a danneggiamenti per fenomeni elettrostatici (EGB)
2 maxon motor control
Edizione Aprile 2006 / Soggetto a modifiche
maxon motor
Manuale d'istruzioni
2
Servoamplificatore 4-Q-EC DES 70/10
Dati tecnici
2.1 Dati elettrici
Tensione d‘esercizio VCC (ripple residuo < 5%) ..........................................................24 - 70 VDC
Massima tensione in uscita .............................................................................................. 0.9 · VCC
Massima corrente in uscita Imax ...............................................................................................30 A
Corrente in uscita in funzionamento continuo Icont...................................................................10 A
Frequenza di commutazione dello stadio di potenza .......................................................... 50 kHz
Rendimento massimo ............................................................................................................ 92 %
Ampiezza di banda del regolatore di corrente....................................................................... 1 kHz
Velocità massima (motore con 1 paio di poli)............................................................... 25 000 rpm
Induttanza minima ai terminali ............................................................................................400 µH
2.2 Ingressi
Valore nominale «Set value» ........................da configurare con connettore DIP switch S9:
-10 ... +10 V (Ri = 80 kΩ) / 0 ... +5 V (Ri = 50 kΩ)
Abilitazione «Enable» ....................................................................+2.4 ... +50 VDC (Ri = 12 kΩ)
Digital 1 (switch «Monitor n» / «Monitor I») ....................................+2.4 ... +50 VDC (Ri = 17 kΩ)
Digital 2 (switch controllo di velocità / di corrente) .........................+2.4 ... +50 VDC (Ri = 90 kΩ)
STOP .............................................................................................+2.4 ... +50 VDC (Ri = 17 kΩ)
Segnali encoder ................................................................................ A, A\, B, B\, I, I\ max. 1 MHz
Segnali sensori Hall ...............................................sensore Hall 1, sensore Hall 2, sensore Hall 3
CAN ID (CAN Identification)............................. da configurare con connettore DIP switch S1 ... 7
ID = 1 ... 127 (codice binario)
2.3 Uscite
Monitor ....... da configurare con connettore DIP switch S10: -10 ... +10 V (R0 = 1 kΩ, fg = 900 Hz)
0 ... +5 V (R0 = 1 kΩ, fg = 900 Hz)
Avviso di monitoraggio «Ready»................................ Open Collector max. 30 VDC (IL < 20 mA)
2.4 Tensioni in uscita
Alimentazione encoder ...............................................................................+5 VDC, max. 100 mA
Alimentazione sensori Hall............................................................................+5 VDC, max. 50 mA
Alimentazione ausiliaria ................................................................................+5 VDC, max. 20 mA
2.5 Interfaccia
RS232............................................................................................ RxD; TxD (max. 115 200 bit/s)
CAN .............................................................................................. CAN_H; CAN_L (max.1 Mbit/s)
2.6 Potenziometri di regolazione
nmax, Offset, Imax, gain
2.7 Indicatori
LED a due colori ............................................................................................... READY / ERROR
verde = READY, rosso = ERROR
2.8 Temperatura / Umidità
Servizio ...................................................................................................................... -10 ... +45°C
Magazzino.................................................................................................................. -40 ... +85°C
Senza condensa ........................................................................................................... 20 ... 80 %
2.9 Dati meccanici
Peso................................................................................................................................ ca. 400 g
Dimensioni ................................................................................................vedi disegno, capitolo 9
Fissaggio ........................................................................................................... flangia per viti M4
2.10 Connessioni
Morsetti del circuito stampato PCB .......................................... Power (a 6 poli), Signal (a 20 poli)
Passo ................................................................................... Power 5.08 mm, Signal 2.54 mm
2
Indicato per misura del cavetto....................................... Power 0.14 ... 1.5 mm (AWG 26-16)
2
....................................................................................... Signal 0.14 ... 0.5 mm (AWG 26-20)
Encoder ...................................................................................Connettore a DIN41651 (a 10 poli)
per cavo piatto nella tacca 1.27 mm con AWG28
Edizione Aprile 2006 / Soggetto a modifiche
maxon motor control 3
maxon motor
Servoamplificatore 4-Q-EC DES 70/10
3
Manuale d'istruzioni
Cablaggio minimo
4 maxon motor control
Edizione Aprile 2006 / Soggetto a modifiche
maxon motor
Manuale d'istruzioni
4
Servoamplificatore 4-Q-EC DES 70/10
Messa in servizio
4.1 Alimentazione
Si può impiegare qualunque livello di alimentazione purché soddisfi i seguenti
requisiti minimi.
Durante la messa in servizio e l’equilibratura consigliamo di separare meccanicamente il motore dalla macchina, per evitare danni dovuti a movimenti incontrollati!
Requisiti dell‘alimentazione
Tensione in uscita
VCC min. 24 VDC; VCC max. 70 VDC
Ripple residuo
<5%
Corrente in uscita
Secondo il carico. In continuo max. 10 A
In accelerazione ad intermittenza max.
30 A
La tensione necessaria può essere ottenuta come segue:
Dati
Ö Coppia d‘esercizio MB [mNm]
Ö Velocità d‘esercizio nB [rpm]
Ö Tensione nominale del motore UN [V]
Ö Velocità a vuoto del motore con UN, n0 [rpm]
Ö Gradiente di velocità del motore ∆n / ∆M [rpm / mNm]
Richiesto
Ö Tensione d‘alimentazione VCC [V]
Soluzione
VCC =
UN
∆n
1
⋅ (nB +
⋅MB) ⋅
+ 2 [V ]
n0
∆M
0 .9
Si scelga ora un’alimentazione che dia la tensione calcolata sotto carico. Nella
formula è prevista una quota massima di PWM del 90 % e una caduta di tensione allo stadio di potenza di max. 2 V.
Nota
L’alimentazione deve consentire di accumulare l’energia accumulata in fase di
frenatura p. es. in un condensatore di carico. Nelle reti stabilizzate elettronicamente si noti che la protezione da sovratensione non è prevista in alcuno stato
operativo.
4.2 Funzione dei potenziometri
Potenziometro
P1
nmax
P2
Offset
P3
P4
Edizione Aprile 2006 / Soggetto a modifiche
Imax
Icont
gain
Funzione
Velocità max. a val.
nom. max. (p.es. potenz.
esterno al fine corsa
destro; 5 V; 10 V)
Equilibratura: n = 0
(val. nom. p.es. potenz.
esterno in posizione
centrale)
Limite di corrente
Amplificazione
Rotazione del potenziometro
vs.sinistra
vs.destra
più lento
min. 0 rpm
più veloce
max.
25 000 rpm
il motore gira
verso sinistra
il motore gira
verso destra
più basso ≈ 0 A più alto ≈ 30 A
più basso ≈ 0 A più alto ≈ 10 A
minore
maggiore
maxon motor control 5
maxon motor
Servoamplificatore 4-Q-EC DES 70/10
Manuale d'istruzioni
4.3 Equilibratura dei potenziometri
4.3.1
Impostazione di base
Con l’impostazione di base i potenziometri sono in una posizione di partenza
favorevole.
Gli apparecchi nell’imballo originale sono già preimpostati.
Impostazione di base del potenziometro
P1
nmax
30 % 1)
P2
Offset
50 %
P3
Imax
50 % 2)
P4
gain
30 %
1) 30 % corrisponde a nmax = ca. 7500 rpm
2) 50 % corrisponde a Icont = ca. 5 A; Imax = ca. 15 A
4.3.2
Equilibratura
Controllo digitale di velocità ad anello chiuso
(vedi anche 5.1.6)
1.
Impostare il valore nominale massimo (p.es. 10 V) e regolare il potenziometro P1 n max fino a raggiungere la velocità massima desiderata.
2.
Regolare il potenziometro P3 Imax sul valore limite desiderato.
Importante: Il valore limite Icont (=1/3 Imax) dovrebbe essere inferiore alla
corrente nominal (corrente continua massima) indicata nella scheda del
motore.
Aumentare lentamente il potenziometro P4 gain finché l’amplificazione
risulta sufficientemente alta.
Importante: se il motore inizia a scuotersi, vibra o fa rumore,
l‘amplificazione scelta è troppo elevata. Il potenziometro P5 deve essere
girato in senso inverso finché, con qualunque carico, l‘instabilità del ciclo
di controllo sparisce.
Impostare il valore nominale 0 V con il potenziometro P2 Offset ed equilibrare il motore sulla velocità 0 rpm.
Nota: Nell’impostazione velocità nominale - valore nominale con potenziometro esterno questo step non è necessario.
3.
4.
Controllo di corrente
digitale
(vedi anche 5.1.6)
1.
2.
Regolare il potenziometro P3 Imax sul valore limite desiderato.
Importante: Il valore limite Icont (=1/3 Imax) dovrebbe essere inferiore alla
corrente nominal (corrente continua massima) indicata nella scheda del
motore.
Impostare il valore nominale 0 V con il potenziometro P2 Offset ed equilibrare il motore sulla velocità 0 rpm.
Nota
Nel funzionamento Controllo di corrente digitale i potenziometri P1 n max e
P4 gain non sono attivi.
6 maxon motor control
Edizione Aprile 2006 / Soggetto a modifiche
maxon motor
Manuale d'istruzioni
5
Servoamplificatore 4-Q-EC DES 70/10
Descrizione funzionale di ingressi ed uscite
5.1 Ingressi
5.1.1
Valore nominale «Set value»
Si possono scegliere due diverse varianti per impostare un valore nominale analogico. Le varianti vengono determinate mediante il DIP switch S9.
L’ingresso «Set value» è protetto da sovratensione.
Set value range -10 ... +10 V
Campo della tensione in ingresso
Configurazione all‘ingresso
Resistenza all‘ingresso
Valore nominale positivo
Valore nominale negativo
DIP switch S9
-10 ... +10 V
Differenziale
80 kΩ
(+Set Value) > (-Set Value)
(+Set Value) < (-Set Value)
OFF
Il range di Set value 0 ... +5 V viene appositamente scelto quando il valore nominale deve essere impostato mediante un potenziometro esterno.
Set value range 0 ... +5 V
Campo della tensione in ingresso
Configurazione all ingresso
Resistenza all‘ingresso
Valore nominale positivo
Valore nominale negativo
DIP switch S9
0 ... +5 V
contro Gnd
50 kΩ
(-Set Value) < 2.5 VDC
(-Set Value) > 2.5 VDC
ON
Potenziometro esterno consigliato
1 kΩ
Nota al Set value range 0 ... +5 V:
Se si usa l‘intervallo 0 ... +5 V l‘ingresso «+Set Value» (Morsetto Signal 1) non
deve essere connesso.
5.1.2
Abilitazione «Enable»
Se alla connessione «Enable» viene applicata una tensione, il servoamplificatore si attiva e trasmette tensione al motore. Se l‘ingresso «Enable» non è connesso oppure è collegato a terra lo stadio di potenza diventa ad alta impedenza
ed in questo modo viene disabilitato (Disable).
L‘ingresso «Enable» è protetto da sovratensione.
Resistenza all‘ingresso
12 kΩ (+5 V)
7 kΩ (+24 V)
Abilitazione «Enable»
Tensione in ingresso minima
Tensione in ingresso massima
Tempo di abilitazione
+2.4 VDC
+50.0 VDC
typ 3 ms (a 5 V)
Disabilitazione «Disable»
Tensione in ingresso minima
Tensione in ingresso massima
Tempo di abilitazione
0 VDC
+0.8 VDC
tipo 4 ms (a 5 V)
Edizione Aprile 2006 / Soggetto a modifiche
maxon motor control 7
maxon motor
Servoamplificatore 4-Q-EC DES 70/10
5.1.3
Manuale d'istruzioni
«Hall sensor 1», «Hall sensor 2», «Hall sensor 3»
I sensori Hall vengono impiegati per la determinazione della posizione del rotore nel processo di avviamento.
Gli ingressi «Hall sensor» sono protetti da sovratensione.
Livello di tensione LOW
Livello di tensione HIGH
Resistenza interna pull-up
max. 0.8 V
min. 2.4 V
2.7 kΩ contro +5 VDC
Adatto a IC di sensori Hall con comportamento Schmitt-Trigger ed uscite opencollector.
5.1.4
«STOP»
Se alla connessione «STOP» viene applicata una tensione, la velocità del motore viene regolata sullo zero con la massima accelerazione negativa (valore
impostato sul potenziometro P3 Imax).
Se l’ingresso «STOP» non è connesso (floating) o è collegato a terra Gnd, la
velocità del motore non viene modificata.
L‘ingresso «STOP» è protetto da sovratensione.
5.1.5
Resistenza all‘ingresso
17 kΩ (+5 V)
12 kΩ (+24 V)
«STOP» inattivo
Tensione in ingresso minima
Tensione in ingresso massima
0 VDC
+0.8 VDC
«STOP» attivato
Tensione in ingresso minima
Tensione in ingresso massima
+2.4 VDC
+50 VDC
Switch del segnale monitor «Digital 1»
Se l‘ingresso «Digital 1» non è connesso (floating) o è collegato a terra Gnd,
all’uscita «Monitor» risulterà la velocità effettiva n.
Se alla connessione «Digital 1» viene applicata una tensione, all‘uscita «Monitor» risulterà il valore effettivo della corrente I.
L‘ingresso «Digital 1» è protetto da sovratensione.
Resistenza all‘ingresso
17 kΩ (+5 V)
12 kΩ (+24 V)
«Monitor n» attivato
Tensione in ingresso minima
Tensione in ingresso massima
0 VDC
+0.8 VDC
«Monitor I» attivato
Tensione in ingresso minima
Tensione in ingresso massima
+2.4 VDC
+50 VDC
8 maxon motor control
Edizione Aprile 2006 / Soggetto a modifiche
maxon motor
Manuale d'istruzioni
5.1.6
Servoamplificatore 4-Q-EC DES 70/10
Switch del regolatore (velocità / corrente) «Digital 2»
Se l‘ingresso «Digital 2» non è connesso (floating) o è collegato a d una tensione maggiore di 2.4 VDC, il servoamplificatore funziona come controllo di velocità digitale.
Se la connessione «Digital 2» viene collegata a terra Gnd, il servoamplificatore
funziona come regolatore di corrente digitale.
L‘ingresso «Digital 2» è protetto da sovratensione.
Resistenza all‘ingresso
92 kΩ (+5 V)
13 kΩ (+24 V)
Resistenza interna pull-up
22 kΩ contro +5 VDC
Regolaz. di velocità attivata
Tensione in ingresso minima
Tensione in ingresso massima
+2.4 VDC
+50 VDC
Regolaz. di corrente attivata
Tensione in ingresso minima
Tensione in ingresso massima
+0 VDC
+0.8 VDC
Nota:
Quando si cambia il tipo di regolazione, occorre disattivare e riattivare (DisableEnable) una volta (vedi 5.1.2) per attivare la nuova regolazione.
5.1.7
Encoder
Tensione di alimentazione encoder
Frequenza in ingresso encoder max.
Livello di tensione
Line Receiver interno
+5 VDC max. 100 mA
1 MHz
TTL
Low
max. 0.8 V
High
min. 2.0 V
EIA standard RS-422
E‘ necessario utilizzare un encoder con Line Driver incorporato.
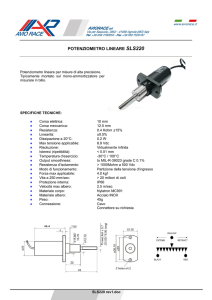
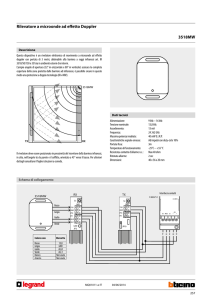
Connettore Print (visto di fronte)
Posizionamento dei connettori Pin dell‘ingresso Encoder:
1
2
3
4
5
6
7
8
9
10
n.c.
+5 V
Gnd
n. c.
A\
A
B\
B
I\
I
non connesso
+5 VDC max. 100 mA
Terra
non connesso
Kanal A invertito
Kanal A
Kanal B invertito
Kanal B
Kanal I invertito
Kanal I
Questo posizionamento dei connettori Pin è compatibile con i connettori per cavo piatto degli encoder HEDL 55xx (con Line Driver) e con l’encoder MR con
Line driver, tipo ML e L.
Nota
L’impostazione standard dell’encoder (così come fornito dalla fabbrica) è di 500 impulsi. Per altri encoder l’impostazione deve avvenire mediante il Software (GUI).
Edizione Aprile 2006 / Soggetto a modifiche
maxon motor control 9
maxon motor
Servoamplificatore 4-Q-EC DES 70/10
Manuale d'istruzioni
5.2 Uscite
5.2.1
Tensione ausiliaria «VCC Hall +5 V / 50 mA OUT»
Per l'alimentazione dei sensori Hall viene messa a disposizione una tensione
prodotta internamente pari a +5 V:
L’uscita è protetta da sovraccarico.
Tensione in uscita
Max. corrente in uscita
5.2.2
+5 VDC
50 mA
Tensione ausiliaria «+5 V / 20 mA OUT»
E disponibile una tensione ausiliaria di +5 V ottenuta internamente:
• Comando degli ingressi: «Enable», «Digital 1» und «Digital 2»
• Alimentazione del potenziometro esterno 1 kΩ
L’uscita è protetta da sovraccarico.
Tensione in uscita
Max. corrente in uscita
5.2.3 «Monitor»
Monitor della velocità
«Monitor n»
Ingresso «Digital 1»
+5 VDC
20 mA
0 ... +0.8 VDC (o non connesso)
Il monitor della velocità serve in primo luogo per la valutazione qualitativa della
dinamica. La velocità assoluta viene definita mediante le caratteristiche del
sensore di velocità e l’impostazione del valore nmax. La tensione in uscita del
monitor di velocità è proporzionale alla velocità.
DIP switch S10 Ð OFF
Campo della tensione in uscita
Rippel
Risoluzione
Resistenza in uscita RO
Frequenza limite fg
DIP switch S10 Ï ON
0 ... +5 VDC
max. 0.02 V
ca. 0.0125 V
(400 Steps)
1 kΩ
900 Hz
-10 ... +10 VDC
max. 0.08 V
ca. 0.0500 V
(400 Steps)
1 kΩ
900 Hz
0V
2.5 V
5.0 V
-10 V
0V
+10 V
Esempio:
-nmax corrisponde a
0 min-1 corrisponde a
+nmax corrisponde a
Valore effettivo della corrente
«Monitor I»
Ingresso «Digital 1»
+2.4 ... +50 VDC
Ai fini del monitoraggio il Servoamplificatore mette a disposizione un valore effettivo del monitor di corrente. Questo segnale è proporzionale alla corrente del
motore.
DIP switch S10 Ð OFF
Campo della tensione in uscita
Rippel
Risoluzione
DIP switch S10 Ï ON
Resistenza in uscita RO
Frequenza limite fg
Fattore di proporzionalità
0 ... +5 VDC
max. 0.02 V
ca. 0.0125 V
(400 Steps)
1 kΩ
900 Hz
≈ 12 A/V
-10 ... +10 VDC
max. 0.08 V
ca. 0.0500 V
(400 Steps)
1 kΩ
900 Hz
≈ 3 A/V
Esempio:
-30 A corrisponde a
0 A corrisponde a
+30 A corrisponde a
0V
2.5 V
5.0 V
-10 V
0V
+10 V
L’uscita «Monitor» è protetta da sovraccarico.
10 maxon motor control
Edizione Aprile 2006 / Soggetto a modifiche
maxon motor
Manuale d'istruzioni
5.2.4
Servoamplificatore 4-Q-EC DES 70/10
Avviso di monitoraggio «Ready»
Con il segnale «Ready» la condizione di pronto ovvero di errore viene segnalata ad un sistemamaster di controllo. La condizione di errore viene memorizzata.
Per eliminare la condizione di errore il servoamplificatore deve essere nuovamente riabilitato («Enable»). Se la causa dell’errore non è ancora stata eliminata, l‘errore viene subito rievidenziato.
Si necessita di una tensione esterna:
Campo della tensione in ingresso
Corrente di carico
Max. 30 VDC
< 20 mA
Attenzione
La corrente di carico deve essere limitata a max 20 mA mediante una resistenza esterna!
111 11 11 111
off
Variante 1:
Standard
(normalmente fornita)
Uscita errore
J403 cortocircuitato (0 Ω)
J404 non connesso (aperto)
L‘uscita «Open-Collector» normalmente, cioè in assenza di errore, è collegata a
terra Gnd.
In caso di errore il transistor di uscita è disabilitato (vedi anche 6.2).
Variante 2:
Speciale
(su specifiche del cliente)
Uscita errore invertita
J403 non connesso (aperto)
J404 cortocircuitato (0 Ω)
L‘uscita «Open-Collector» normalmente, cioè in assenza di errore, è disabilitata. In caso di errore il transistor di uscita è collegato a terra Gnd
(vedi anche 6.2).
Edizione Aprile 2006 / Soggetto a modifiche
maxon motor control 11
maxon motor
Servoamplificatore 4-Q-EC DES 70/10
Manuale d'istruzioni
5.3 Interfaccia
5.3.1
Interfaccia seriale «RS232 RxD», «RS232 TxD»
Tensione in ingresso massima
Tensione in uscita massima
Rapporto di conversione massimo
Protezione del segnale
Driver/Receiver interno RS232
Rapporto Baud (configurabile)
± 30 V
± 30 V
115 200 bit/s
Protetto ESD
EIA RS232 standard
Fino a max. 115 200 bit/s
Nota
• Prestare attenzione al massimo rapporto Baud dell’interfaccia seriale del PC.
• L’impostazione standard del rapporto Baud (fornita normalmente) è di
38 400 Baud. Se si desidera un rapporto Baud diverso, è necessario modificarlo mediante il Software (GUI).
Connessione DES - PC
5.3.2
Databits
Parità
Stopbit
Protocollo
8
nessuna
1
nessuno
Servoamplificatore DES 70/10
Morsetto Signal 18 Gnd
Morsetto Signal 19 RS232 RxD
Morsetto Signal 20 RS232 TxD
Interfaccia PC (RS232), DIN41652
Pin 5 Gnd
Pin 3 TxD
Pin 2 RxD
Interfaccia CAN «CAN high», «CAN low»
Tipo standard
Rapporto di conversione massimo
Numero massimo di nodi CAN
Protocollo
Tipo di CAN-Frame
Impostazioni Identifier
Connessione DES – CAN Bus Servoamplificatore DES 70/10
CiA DS-102
Morsetto Signal 16 CAN high
Morsetto Signal 17 CAN low
Morsetto Signal 18 Gnd
12 maxon motor control
CAN High-speed
compatibile ISO 11898
1 Mbit/s
127
CAN 2.0B
Standard (11-bit-Identifier)
mediante interruttore DIP-Switch o software su CAN o RS232 (con software
solo impostazione temporanea)
CAN 9-pin D-Sub (DIN41652)
Pin 7 CAN_H
Pin 2 CAN_L
Pin 3 CAN_GND
Edizione Aprile 2006 / Soggetto a modifiche
maxon motor
Manuale d'istruzioni
5.3.3
Servoamplificatore 4-Q-EC DES 70/10
CAN ID (Identificazione CAN)
La CAN-ID (node address) viene impostata mediante gli interruttori DIP S1 ... 7.
Mediante l’impiego dei codici binari si possono codificare tutti gli indirizzi da
1 ... 127.
Interruttor
1
2
3
4
5
6
7
Codice
20
21
22
23
24
25
26
Valore
1
2
4
8
16
32
64
Sommando i valori di tutti gli interruttori che sono in posizione „ON“ si ottiene
la CAN-ID (node address) impostata.
Esempi:
la seguente Tabelle serve da riferimento ed è incompleta.
CAN-ID
Interruttore
1
2
3
4
5
6
7
Valore
1
2
4
8
16
32
64
Posizione interruttore
calcolo
1
1
0
0
0
0
0
0
1
2
0
1
0
0
0
0
0
2
32
0
0
0
0
0
1
0
32
35
1
1
0
0
0
1
0
1 + 2 + 32
127
1
1
1
1
1
1
1
1+2+4+8+
16 + 32 + 64
Nota
• CAN-ID = 0 non è valida e viene sostituita da CAN-ID = 1.
• L’interruttori DIP S8…10 influenzano soltanto il range di Set value e non la
CAN-ID.
Edizione Aprile 2006 / Soggetto a modifiche
maxon motor control 13
maxon motor
Servoamplificatore 4-Q-EC DES 70/10
Manuale d'istruzioni
5.4 Chiarimenti relativi al limite di corrente
I motori brushless maxon EC motor sono ideali per l’impiego nell’ambito dei
servoazionamenti. Si richiedono tempi di accelerazione molto rapidi ma anche
protezione da sovraccarico termico. Il Servoamplificatore digitale DES 70/10 si
comanda con un limite di corrente Imax ed un Icont , in questo modo si soddisfano
entrambi i requisiti.
Corrente in uscita massima Imax
Corrente continua massima Icont
Rapporto Imax : Icont
< 30 A
< 10 A
3:1
La corrente continua impostata sul potenziometro Icont (0 ... 10 A) resta a disposizione senza limiti di tempo.
E‘ ammessa anche una corrente più elevata per breve tempo (Imax = 3·Icont), ove
la durata dipende dal precedente andamento della corrente.
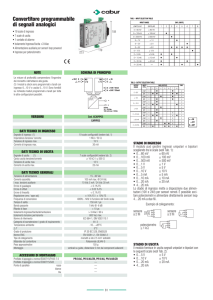
Esempio 1:
a)
b)
Durante il tempo ta1 per l’accelerazione del motore viene ammessa una corrente
più elevata. In seguito viene limitata alla corrente continua Icont.
Se il motore viene impiegato per lungo tempo in presenza di carico in funzionamento continuo Icont non è comunque consentita una corrente più elevata (dunque ta = 0 s).
Esempio 2: (funzionamento ciclico)
a)
b)
Nel funzionamento ciclico dopo un tempo di pausa di ca. 10 s la corrente in uscita massima Imax è di nuovo disponibile. Ciò è possibile a condizione che la
corrente tra le due accelerazioni sia pari a zero. Altrimenti si riduce il tempo ta.
1
Il tempo dipende dal valore della corrente e dal precedente carico di corrente del motore
14 maxon motor control
Edizione Aprile 2006 / Soggetto a modifiche
maxon motor
Manuale d'istruzioni
6
Servoamplificatore 4-Q-EC DES 70/10
Stati d'esercizio
6.1 Senza errori
Il LED verde permette di distinguere lo stato d‘esercizio «Enable» dal «Disable». DES in stato «Disable» (DES pronto, tutto ok): il LED verde lampeggia
(frequenza di ca. 1 Hz), il LED rosso è spento.
DES in stato «Enable» (stadio di potenza del DES in funzione): Il LED verde è
sempre acceso, il LED rosso è spento.
6.2 In presenza di errore
Gli stati di errore vengono rilevati dal DES.
In condizione di errore il LED rosso è sempre acceso.
Secondo il tipo di errore il LED verde ha un diverso lampeggio.
Esempio: Error 5
grüne LED ein
Numero di
impulsi lampeggianti del
LED verde
1
2
3
4
5
6
possibili errori
Error 0 => Hall sensor error
1
• errato cablaggio dei sensori Hall
• errato cablaggio nell’alimentazione dei sensori Hall
• sensore Hall difettoso nel Motore
Error 1 => Index processing error
2
3
• impulso Index dell’Encoder mancante
• parametri di sistema non impostati correttamente („Encoder Resolution“)
• frequenza in ingresso del segnale Encoder troppo elevata
Error 2 => Wrong setting of encoder resolution
• parametri di sistema non impostati correttamente („Encoder Resolution“)
Error 3 => Hall sensor 3 not found
4
• errato cablaggio del sensore Hall 3
• sensore Hall 3 del Motore danneggiato
• parametri di sistema impostati troppo piccoli („Encoder Resolution“)
Error 4 => Over current error
5
• corto circuito nell’avvolgimento del motore
• tensione di alimentazione non consente sufficiente corrente di accelerazione
• impostazione Gain troppo elevata. L’amplificazione della regolazione della
velocità deve essere ridotta
• parametro di sistema „Acceleration“ troppo alto
• guasto dello stadio di potenza
Error 5 => Over voltage error
6
7
8
• tensione di alimentazione troppo elevata
• tensione EMK troppo elevata nel funzionamento del generatore
Error 6 => Over speed error
• velocità troppo elevata (>30 000 rpm)
Error 7 => Supply voltage too low for operation
• tensione di alimentazione troppo bassa
Error 8 => Angle detection error
9
12
• lo scostamento tra l’encoder e i sensori Hall è troppo grande
• disturbi ai segnali dell’encoder e dei sensori Hall
Error 11 => Overtemperature
• la temperatura dello stadio di potenza è troppo elevata
Edizione Aprile 2006 / Soggetto a modifiche
maxon motor control 15
maxon motor
Servoamplificatore 4-Q-EC DES 70/10
7
Manuale d'istruzioni
Installazione conforme alla EMV
Alimentazione (+VCC - Power Gnd)
• Di regola non occorre schermatura.
• Cablaggio in parallelo per l’alimentazione di più servoamplificatori dalla stessa rete.
Cavi motore (> 30 cm)
• Il cavo deve essere schermato.
• Connettere la schermatura sui due lati:
Lato DES 70/10:
Morsetto 1 «Ground Safety Earth» e/o base della carcassa.
Lato motore:
Carcassa del motore o altro elemento meccanico connesso a
bassa impedenza alla carcassa del motore.
• Usare un cavo separato.
Cavi dei sensori di Hall (> 30 cm)
• Il cavo deve essere schermato.
• Connettere la schermatura sui due lati:
Lato DES 70/10:
Morsetto 1 «Ground Safety Earth» e/o base della carcassa.
Lato motore:
Carcassa del motore o altro elemento meccanico connesso a
bassa impedenza alla carcassa del motore.
• Usare un cavo separato.
Connessione diretta cavi motore/Hall (≤ 30 cm) su DES 70/10
• Tubo flessibile di schermatura sui cavi di connessione motore/Hall.
(Eccetto EC 45 / EC 60)
• Connettere la schermatura sui due lati.
oppure
• Collegamento possibilmente a bassa impedenza tra carcassa del motore e base della carcassa del DES 70/10.
• Posizionamento dei cavi di connessione di motore/Hall possibilmente vicino ai cavi
suddetti.
Cavi encoder
• Si consiglia un encoder con line driver.
• Canale A, A\; Canale B, B\; Canale I, I\; ritorti a coppie.
• Di regola non è necessaria una schermatura.
• Usare un cavo separato.
RS-232
• Si consiglia un cavo schermato ritorto a coppie.
• Usare un cavo separato.
16 maxon motor control
Edizione Aprile 2006 / Soggetto a modifiche
maxon motor
Manuale d'istruzioni
Servoamplificatore 4-Q-EC DES 70/10
CAN
• Vedi CiA DS-102 (impianto a due cavi, ritorti a coppie e/o schermati, con ritorno in
comune, terminato con l’impedenza caratteristica della linea.
• Terminata con impedenza caratteristica dal circuito esterno.
• Nessuna separazione galvanica sul DES 70/10.
Segnali analogici (Set value, Monitor)
• Di regola non occorre schermatura.
• In presenza di segnali analogici con picchi bassi e ambiente elettromagnetico attivo,
usare una schermatura.
• Di regola connettere la schermatura sui due lati. In presenza di disturbi su 50/60 Hz,
scollegare da un lato.
Segnali digitali (Enable, Stop, Digital 1, Digital 2, Ready)
• Non è necessaria una schermatura.
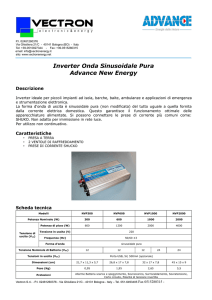
Vedi anche schema di funzionamento al capitolo 8.
Ai sensi della EMV solo l’impianto nel suo complesso, composto da tutti i singoli
componenti (motore, amplificatore, alimentazione, filtri EMV, cablaggio) viene sottoposto a verifica, per assicurare un funzionamento esente da disturbi con conformità CE.
Edizione Aprile 2006 / Soggetto a modifiche
maxon motor control 17
maxon motor
Servoamplificatore 4-Q-EC DES 70/10
8
Manuale d'istruzioni
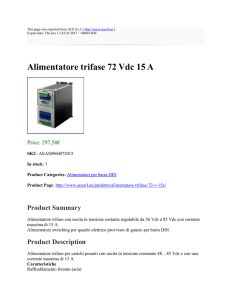
Schema di funzionamento
Ready
Gnd
+5V / 100mA
I\
I B\ B A\ A
0R
+5V (2)
+5V
+5V
+5V / 20mA OUT
+5V (1)
green
LED
red
LED
Gnd
Line
Receiver
+5V (1)
+5V (2)
+3.3V
Supply
1
+12V
+5V
-12V
+VCC 24 - 70VDC
J403
+VCC Hall +5V / 50mA
Power Gnd
J404
Gnd
Power
Driver
+5V
+3.3V
MOSFET
Full
Bridge
Current
detect
Motor winding 1
Current
detect
Hall sensor 1
Motor winding 2
Current
detect
+5V
+3.3V
Motor winding 3
1
Hall sensor 2
+3.3V
+5V
+3.3V
P1 nm ax
Digital
Signal
Processor
Hall sensor 3
DIP9
1
+12V
DIP1..DIP7 (CAN ID)
+Set value
+3.3V
P2 Offset
+3.3V
+12V
P3 Ima x
-12V
-Set value
DIP10
+3.3V
-12V
+5V
P4 gain
Enable
+3.3V
Monitor
STOP
+3.3V
+5V
CAN low
+3.3V
Gnd
1
RS232
Transceiver
Digital 2
1
9
CAN high
CAN
Transceiver
Digital 1
Gnd
TXD RXD
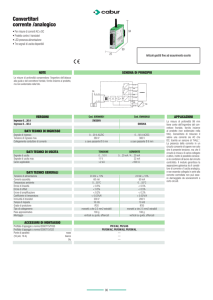
Disegno quotato
misure in [mm]
1 2 3 4 5 6
Power
1 2 3 4 5 6 7 8 9 10
Signal
174
Hall sensor 1
Hall sensor 2
Hall sensor 3
Vcc Hall +5V / 50mA OUT
Gnd
CAN high
CAN low
Gnd
RS232 RXD
RS232 TXD
111213141516171819 20
11
12
13
14
15
16
17
18
19
20
180
1 +Set value
2 Set value
3 Enable
4 STOP
5 Digital 1
6 Digital 2
7 +5V / 20mA OUT
8 Gnd
9 Monitor
10 Ready
Encoder
Set CAN-ID = 1...127
Set value range
0...5V
ID=127
ID=35
ID=2
ID=1
P1 n max
P2 Offset
maxon motor
maxon motor control
4-Q-EC
Servoamplifier
DES70/10 70V/10A 228597
Made in Switzerland
P3 I max
P4 gain
LED green-ok / red-fault
12
76
103
18 maxon motor control
13.2
29
Edizione Aprile 2006 / Soggetto a modifiche