INTRODUZIONE
1
Premessa
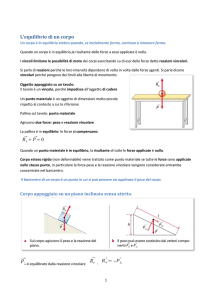
La Scienza delle Costruzioni è la disciplina di base dell’ingegneria
strutturale. Essa ha come scopo principale quello di fornire gli strumenti per
valutare la sicurezza e la funzionalità delle strutture resistenti delle costruzioni e
delle macchine, dove con il termine strutture si intendono dei solidi mono, bi o
tridimensionali aventi la funzione di resistere alle azioni cui sono sottoposti e di
trasmetterle al terreno di fondazione o, in generale, ai vincoli.
Verificare la sicurezza significa controllare che le strutture di una
costruzione siano in grado di sopportare i carichi che graveranno su di loro,
senza provocarne il crollo totale o parziale. Per effettuare tale verifica occorre
conoscere lo stato di sforzo cui è soggetto il materiale per effetto dei carichi e
confrontarlo con la resistenza dello stesso materiale.
Verificare la funzionalità significa controllare che la risposta delle strutture
resistenti ai carichi sia compatibile con un corretto esercizio. Tale verifica si
effettua controllando che la deformazione degli elementi strutturali sia compatibile con le funzioni che essi sono chiamati a svolgere durante l'esercizio.
Per valutare la sicurezza e la funzionalità di una struttura occorre conoscere
• la geometria della struttura
• i carichi a cui è sottoposta
• i vincoli presenti
• il materiale con cui è realizzata
per poterli rappresentare attraverso dei modelli adeguati
P
Δl
l
F
A
⇒
q
⇒
F/A
modello
reale
Δl/l
F
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
2
ISOSTATICHE
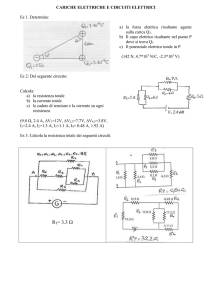
1 FORZE, VINCOLI E REAZIONI VINCOLARI
1.1. Forze e operazioni sulle forze
Una forza è un azione capace di modificare lo stato di quiete o di moto
rettilineo uniforme di un corpo. In base alla dimensione della zona su cui
agiscono, le forze si possono suddividere in forze concentrate, se agiscono su
una zona talmente limitata da potersi considerare puntiforme, ed in forze
distribuite, se agiscono su una zona di dimensioni finite.
Le prime vengono misurate in N (Newton) nel sistema internazionale ed in
kg nel sistema degli ingegneri, scambiando la massa con il peso corrispondente.
Infatti, alla massa m di 1 kg corrisponde una forza peso P = m g ≅ 10 N nel
sistema internazionale ed una forza P di 1 kg nel sistema degli ingegneri. Vale,
pertanto, la seguente relazione di equivalenza tra i due sistemi: 1 kg ≈ 10 N.
Le seconde si possono suddividere in forze distribuite per unità di
lunghezza, misurate in N/m oppure in kg/m, ed in forze distribuite per unità di
superficie o pressioni, misurate in Pa (Pascal) dove 1 Pa = 1 N/m2. Poiché il Pa
è un unità di misura molto piccola per i valori delle pressioni caratteristici
dell’ingegneria strutturale, si preferisce far riferimento al MPa, dove
1 MPa = 106 Pa = 1 N/mm2,
ovvero
1 MPa = 0.1 kN/cm2.
Se si misurano le forze in kN e le aree in cm2 allora come unità di misura
delle pressioni è immediato utilizzare i kN/cm2.
Nel vecchio sistema degli ingegneri venivano spesso utilizzati i kg/cm2 come
unità di misura delle pressioni. Tra i due diversi sistemi valgono le seguenti
relazioni di equivalenza:
1 MPa = 10 kg/cm2
1 kN/cm2 = 10 MPa = 100 kg/cm2
Inizialmente, studieremo le comuni operazioni che si possono effettuare con
i sistemi di forze concentrate, con particolare attenzione rivolta verso i sistemi
piani di forze. Gli elementi caratteristici di una forza concentrata sono quelli di
un vettore applicato, ovvero il modulo, il verso, la direzione individuata dalla
retta d’azione ed il punto di applicazione.
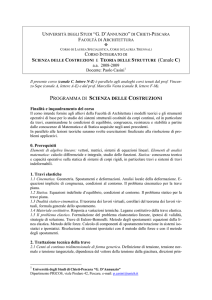
Si definisce, inoltre, momento di una forza F rispetto al punto Q, detto polo,
la seguente quantità:
F
MQ = (P − Q) ∧ F
Q
dove P indica un punto qualsiasi della retta d’azione di F
ed il simbolo ∧ il prodotto vettoriale. Pertanto il vettore
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
α
b
P
TRAVI
3
ISOSTATICHE
MQ è ortogonale al piano dei vettori F e P−Q ed ha modulo:
MQ = F | P − Q | sin α = F b
dove F indica il modulo di F e α l’angolo compreso tra le direzioni dei vettori F
e QP , come indicato in figura. Il momento della forza F si può quindi calcolare
come il prodotto tra il suo modulo F ed il braccio b, pari alla distanza tra la retta
d’azione della forza F ed il polo Q considerato.
In base alla regola della mano destra, il segno del momento è positivo se la
forza produce una rotazione in senso antiorario attorno al polo Q (come nel caso
in figura), negativo se orario.
Si osservi, inoltre, che il momento della forza F non cambia spostando il
punto di applicazione P lungo la retta d’azione, poiché non varia il braccio b.
1.1.1. Equazioni cardinali della statica
Un corpo rigido è in equilibrio statico se e
solo se la risultante ed il momento risultante di
tutte le forze ad esso applicate, sia forze attive
che reazioni vincolari, sono nulli, ovvero se
valgono le seguenti condizioni:
R=
Q
F
P2
F2
x2
1
Fi
Pi
Pn
P1
n
∑Fi = 0
i =1
MQ =
n
∑
(1.1)
x3
Fn
x1
(Pi − Q) ∧ F i = 0
i =1
dove la scelta del polo Q è arbitraria. In tal caso, in base alle equazioni cardinali
della dinamica, la quantità di moto e il momento della quantità di moto del corpo
si mantengono costanti, per cui se il corpo è inizialmente in quiete continua ad
esserlo anche sotto l’azione di un sistema di forze equilibrato.
Se le condizioni di equilibrio (1.1) risultano soddisfatte per il polo Q, allora
lo sono anche per qualsiasi altro polo Q′, in tal caso si ha infatti:
MQ′ =
n
∑
(Pi − Q′) ∧ F i =
i =1
n
∑
[( Pi − Q) + (Q − Q′)] ∧ F i =
i =1
n
= MQ + (Q − Q′) ∧ ∑ F i = 0
(1.2)
i =1
Se sono verificate le condizioni di equilibrio (1.1) anche il sistema di forze si
definisce in equilibrio.
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
4
ISOSTATICHE
Nel caso tridimensionale le condizioni di equilibrio (1.1) corrispondono a sei
equazioni scalari per le componenti di R e MQ, mentre per un sistema piano di
forze tali condizioni si riducono alle tre seguenti equazioni scalari:
n
n
∑ F1i = 0
n
∑ F2i = 0
i =1
∑ M Qi = 0
i =1
(1.3)
i =1
dove Fki è la componente della forza F i nella direzione dell’asse xk e M Qi è il
momento della forza F i rispetto ad un generico punto Q del piano scelto come
polo. Si noti che il vettore M Qi ha direzione ortogonale al piano delle forze e
quindi parallela all’asse x3.
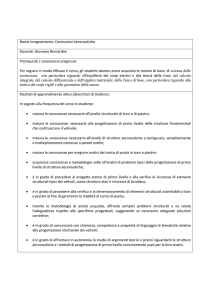
In particolare, due forze sono in equilibrio se e solo se hanno lo stesso
modulo, la stessa retta d’azione e versi opposti (i). Inoltre, tre forze complanari
sono in equilibrio se le rette d’azione passano per uno stesso punto (ii) e
disponendole una di seguito all’altra formano un triangolo chiuso, con i versi
che si rincorrono (iii).
i)
F
F1
ii)
F
iii)
F3
F2
F1
F2
F3
1.1.2. Sistemi equivalenti di forze
Due sistemi di forze {F i}i =1,.., n e { F j}j =1,.., m si dicono equivalenti se hanno
stessa risultante e stesso momento risultante rispetto ad uno stesso polo, ad
esempio il punto Q, cioè se:
R= R
MQ = M Q
(1.4)
Se le condizioni di equivalenza (1.4) sono verificate per il generico polo Q,
allora devono verificarsi anche rispetto a qualunque altro polo. Infatti, se
valgono le (1.3) è facile mostrare che risulta anche MQ′ = M Q′ , comunque scelto
il punto Q′. Infatti, procedendo come per la (1.2) si ottiene
MQ′ = MQ + (Q − Q′) ∧ R = M Q + (Q − Q′) ∧ R = M Q .
Un generico sistema di forze è equivalente ad un sistema formato dalla sua
risultante R, applicata in un generico punto P, e dal momento risultante MP
valutato rispetto allo stesso punto.
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
5
ISOSTATICHE
Per un generico sistema piano di forze con R ≠ 0 esiste una retta, detta asse
centrale, tale che il momento risultante valutato rispetto ai suoi punti risulta
nullo. Pertanto, il sistema di forze risulta equivalente ad un sistema formato
dalla sola risultante R, applicata in un punto A dell’asse centrale, rispetto al
quale si ha MA = 0. La direzione di R ed il punto A definiscono la retta d’azione
della risultante, che coincide con l’asse centrale. Se R = 0 si possono presentare
due casi: se il momento risultante M è diverso da zero allora il sistema è
equivalente ad una coppia M; se anche M = 0 allora il sistema è in equilibrio.
La risultante R delle forze che compongono il sistema si può ricavare
graficamente disponendo tutte le forze una di seguito all’altra, in tal caso R è il
lato che chiude il poligono delle forze.
La retta d’azione della risultante R di un sistema piano di forze si può
determinare dalla condizione che il momento risultante di tutte le forze che
compongono il sistema sia nullo rispetto ad un punto A che appartiene a tale
retta, cioè MA = 0. Tale condizione permette di ricavare un punto A appartenente
alla retta cercata, la cui direzione è la stessa di R. Applicando la risultante R in
un qualsiasi punto di tale retta si ottiene un sistema equivalente a quello di
partenza formato da una sola forza, la risultante R.
1.1.3. Risultante di 2 o più forze concorrenti
La risultante R di un sistema piano formato da n forze le cui rette d’azione
siano concorrenti in uno stesso punto (i) è fornita dal lato di chiusura del
poligono delle forze (ii). La retta d’azione di R passa per lo stesso punto, poiché
il momento risultante delle n forze rispetto a tale punto si annulla.
Nel caso piu frequente in cui le rette d’azione delle n forze non convergono
in uno stesso punto ma si intersecano a due a due, la risultante si può ricavare
sommando a due a due le forze e sostituendo ad esse la loro risultante, fino a
ridursi ad un'unica forza risultante.
F1
i)
F
ii)
F1
F2
3
R
F2
F3
R
1.1.4. Risultante di due forze parallele
La risultante R di due forze F 1 ed F 2 parallele e concordi ha stessa direzione
e verso delle forze e modulo R = F 1 + F 2. La retta d’azione di R è interna alle
due forze, a distanza d1 da F 1 e d2 da F 2, in modo che si annulli il momento
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
6
ISOSTATICHE
risultante delle due forze rispetto ad un qualsiasi punto di tale retta, cioè:
F 1 d1 − F 2 d2 = 0
dove
d1 + d2 = d
da cui:
d1 =
F1
F2
F1 + F 2
d2 =
d
F1
F1 + F 2
F2
R
d
d1
d2
d
Se le forze F 1 ed F 2 siano parallele e discordi, con F 2 > F1, la risultante R
ha stessa direzione delle due forze, il verso della maggiore (F 2) e modulo pari
alla differenza R = |F 2 − F1|. La retta d’azione di R è esterna alle due forze dalla
parte della maggiore, a distanza d1 da F 1 e d2 da F 2, in modo che si annulli il
momento risultante delle due forze valutato rispetto ad un qualsiasi punto di tale
retta, cioè:
F 1 d1 − F 2 d2 = 0
dove d1 − d2 = d
Pertanto:
d1 =
F2
F 2 − F1
d2 =
d
F1
F 2 − F1
F2
F1
d
R
d2
d
d1
Due forze parallele a distanza d che hanno lo stesso modulo e versi opposti
formano una coppia, ovvero un sistema a risultante nulla (R = 0) e momento
risultante costante rispetto a qualsiasi punto del piano e pari al prodotto F d.
Infatti, il momento risultante rispetto ad un generico punto P preso a distanza x
da una delle due forze vale:
F
F P
MP = F (d + x) − F x = F d
dove
d = d1 − d2
d
x
per cui MP non dipende dalla distanza x, ovvero dal polo P scelto, ma è costante
per tutti i punti del piano.
1.1.5. Risultante di una forza ed una coppia
Un sistema formato da una forza F ed una coppia C ha risultante R = F. La
retta d’azione di R è situata a distanza d da F, tale che si annulli il momento
risultante della forza e della coppia rispetto ad un qualsiasi suo punto, cioè:
Fd−C=0
da cui
d=C/F
F
C
d
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
R=F
TRAVI
7
ISOSTATICHE
1.2 Carichi distribuiti per unità di lunghezza
Si consideri un carico distribuito lungo un tratto di lunghezza l, la cui intensità
(variabile) sia definita dalla funzione q(x) per 0 ≤ x ≤ l, dove
ΔF
Δx → 0 Δx
d
q ( x) = lim
e q si misura in kN/m. La risultante dei
carichi distribuiti lungo un tratto di
lunghezza infinitesima dx risulta
Q
q(x)
O
dx
x
l
dQ = q(x) dx
Pertanto, la risultante Q del carico distribuito lungo il tratto di lunghezza l è
l
l
0
0
Q = ∫ dQ = ∫ q ( x) dx .
Per trovare la retta di applicazione di Q si eguaglia il momento della
risultante Q, applicata a distanza d incognita da O, al momento risultante del
carico distribuito q(x) rispetto all’origine O dell’asse x
l
− Q d = − ∫ q ( x) x dx
da cui
d=
0
1 l
∫ q( x) x dx
Q0
Ad esempio, per un carico uniformemente distribuito q(x) = q = cost, come
nella prima figura sottostante, si ha:
d = l /2
Q=ql
mentre per una distribuzione lineare di carico q(x) = q0 x/l, come nella seonda
figura, si ha:
Q=
q0 l
2
d=
d = l/2
2
l
3
Q = q0 l/2
d = 2/3 l
Q = ql
q
l
q(x) = q
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
q0
l
q(x) = q0 x / l
TRAVI
ISOSTATICHE
8
1.3 Elementi di cinematica dei corpi rigidi
Durante il moto di un corpo rigido due punti qualsiasi del corpo devono
mantenere invariata la loro distanza. Si considerino ad esempio i punti P e P0 di
un corpo rigido distanti l uno dall’altro. In seguito ad un moto rigido nel piano
x1- x2, tali punti si spostano nella posizione individuata dai punti P′ e P0′ sempre
a distanza l tra loro.
P′
l
ϕ
P′′
x2
P0′
u
u0
P
P0
l
x1
Indicando con u = P′ − P e u0 = P0′ − P0 si ha
u = (P′ − P0′) + (P0′ − P0) + (P0 − P) = u0 + (Q − I)(P − P0)
poiché
P′ − P0′ = Q (P′′ − P0′) = Q (P − P0)
dove Q è la matrice di rotazione di un angolo ϕ, positivo se antiorario, attorno
all’asse x3.
⎡cos ϕ − sin ϕ⎤
Q =⎢
⎥≈
⎣ sin ϕ cos ϕ ⎦
⎡ 1 − ϕ⎤
⎢ϕ 1 ⎥
⎦
⎣
Per rotazioni ϕ infinitesime si ha cos ϕ ≈ 1 e sin ϕ ≈ ϕ. Indicando poi con W la
matrice antisimmetrica
⎡ 0 − ϕ⎤
W=Q−I≈ ⎢
⎥
⎣ϕ 0 ⎦
si ottiene la seguente relazione tra gli spostamenti infinitesimi u ed u0 di due
generici punti P e P0 di un corpo rigido durante un moto rigido di ampiezza
infinitesima
u = u0 + W (P − P0)
Utilizzando il prodotto vettoriale con il vettore ϕ = (0, 0, ϕ) tale relazione
può anche scriversi
u = u0 + ϕ ∧ (P − P0)
poiché la relazione Wa = ϕ ∧ a risulta verificata per qualsiasi vettore a.
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
9
ISOSTATICHE
Pertanto, un generico moto rigido di ampiezza infinitesima di un corpo può
suddividersi nella somma di una traslazione pari allo spostamento di un generico
punto P0 più la rotazione infinitesima del corpo attorno al punto P0.
Se si considerano anche le rotazioni attorno agli altri assi, raccolte nel
vettore ϕ = (ϕ1, ϕ2, ϕ3), la precedente relazione vale anche nel caso di un moto
rigido nello spazio 3D.
La precedente relazione segue anche dall’equazione di Poisson, studiata in
meccanica razionale, che lega le velocità v e v0 di due generici punti P e P0 di un
corpo rigido durante un atto di moto di rototraslazione
v = v0 + ω ∧ (P − P0)
dove ω è il vettore che raccoglie le velocità angolari del corpo attorno agli assi
del sistema di riferimento cartesiano. Indicando con u e u0 gli spostamenti dei
punti P e P0 e con ϕ il vettore che raccoglie le rotazioni del corpo attorno agli
assi, la relazione di Poisson può anche scriversi
du du 0
dϕ
=
+
∧ (P − P0)
dt
dt
dt
Moltiplicando tale relazione per dt e considerando spostamenti e rotazioni
infinitesimi si ottiene la relazione tra gli spostamenti infinitesimi u ed u0 di due
generici punti P e P0 di un corpo rigido durante un atto di moto rigido:
u = u0 + ϕ ∧ (P − P0) = u0 + W (P − P0)
dove W è la matrice antisimmetrica associata al vettore ϕ, ovvero:
⎡ 0 − ϕ3 ϕ 2 ⎤
W = ⎢ ϕ3
0 − ϕ1 ⎥
⎢
⎥
⎢⎣− ϕ 2 ϕ1
0 ⎥⎦
ϕ = (ϕ1, ϕ2, ϕ3)
u
Q
u
Q
C
P
u
P″
0
u0
u
u
R
R
0
uu0
u0
P0
x1
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
u
P
P
P0′
x2
x3
P′
P
P
P0
P
ϕ
P0
P
u =u
0
P
u = ϕ ∧ (P−P0)
TRAVI
10
ISOSTATICHE
Gradi di libertà
I gradi di libertà g di un sistema meccanico sono il numero di parametri
necessari e sufficienti per descriverne la configurazione. In particolare, un corpo
rigido nello spazio tridimensionale ha g = 6 gradi di libertà, pari al numero delle
equazioni di equilibrio. Note, infatti, le 3 componenti del vettore spostamento u0
di un generico punto P0, definito polo, e le rotazioni attorno ai 3 assi raccolte nel
vettore ϕ, la formula di Poisson fornisce lo spostamento di qualsiasi altro punto
P del corpo durante un moto rigido di ampiezza infinitesima, cioè tale per cui gli
spostamenti e le rotazioni possano considerarsi infinitesimi.
1.3.1. Moti piani
I gradi di libertà g di un corpo rigido vincolato a muoversi nel piano x1-x2 si
riducono a 3: le componenti u10 e u 20 del vettore spostamento u0 e la rotazione
ϕ = ϕ3 del corpo attorno all’asse x3. In tal caso, il vettore rotazione diventa ϕ =
(0, 0, ϕ). Anche in questo caso g è pari al numero delle equazioni di equilibrio.
Un sistema piano formato da n corpi rigidi ha g = 3 n gradi di libertà e per esso
si possono scrivere 3 n equazioni di equilibrio, ovvero 3 per ciascun corpo.
Centro di istantanea rotazione
Durante un moto rigido piano di ampiezza infinitesima esiste un punto C del
piano attorno al quale avviene il movimento di rotazione del corpo. Tale punto,
definito centro di istantanea rotazione (c.i.r.), è l’unico punto del piano che non
subisce spostamenti. Esso non appartiene necessariamente al corpo. La sua
posizione è individuata dalla condizione
uC = u0 + ϕ ∧ (C − P0) = 0
Premoltiplicando vettorialmente tale relazione per il vettore rotazione ϕ si
ha
ϕ ∧ u0 − ϕ2 (C − P0) = 0
da cui si ottiene la posizione del centro di istantanea rotazione:
C − P0 =
1
ϕ ∧ u0
2
ϕ
Si osservi che C è ortogonale ai vettori ϕ e u0, per cui C è situato nel piano
del moto sulla retta passante per P0 ed ortogonale al vettore velocità del punto
P0. Se si sceglie C come polo (P0 = C) si ha u0 = uC = 0 e quindi
u = ϕ ∧ (P − C)
per cui
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
|u|=ϕ|P−C|
TRAVI
ISOSTATICHE
11
poiché i vettori ϕ e P−C risultano ortogonali. Il vettore P−C appartiene infatti al
piano del moto e del corpo, mentre il vettore rotazione ϕ risulta ortogonale a tale
piano.
Un generico punto P del corpo subisce quindi uno spostamento nel piano in
direzione ortogonale alla congiungente il punto stesso con il c.i.r. e di ampiezza
proporzionale alla distanza tra il punto ed il c.i.r. Pertanto, se è nota la direzione
dello spostamento di un punto del corpo allora il c.i.r. deve trovarsi necessariamente sulla retta ortogonale a tale direzione, passante per il punto stesso.
Se si conoscono le direzioni degli spostamenti di due punti del corpo allora
si può individuare il c.i.r. dall’intersezione delle due rette corrispondenti.
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
ISOSTATICHE
12
2. LE TRAVI
Gli elementi che compongono una struttura vengono definiti travi, piastre (o
lastre) e volte (o gusci), secondo la geometria ed, in particolare, il rapporto tra le
dimensioni. Le lezioni che seguono si concentreranno essenzialmente su un
unico tipo di strutture, quelle formate da travi. Lo studio della trave sarà tuttavia
preceduto dai fondamenti della meccanica dei solidi tridimensionali. Tale
impostazione generale costituisce anche il presupposto per affrontare lo studio di
altre tipologie strutturali, quali le piastre, le lastre, i gusci, le cupole e, in
generale, i solidi tridimensionali.
A
G
C
La trave è un solido di forma allungata avente una dimensione prevalente
sulle altre due. La trave si può pensare generata dal movimento di una figura
piana di area A, il cui baricentro G percorra una linea C ortogonale al piano della
stessa figura. La figura piana rappresenta la sezione trasversale della trave,
mentre la linea descritta dal baricentro G si definisce asse geometrico della trave
e si assume di lunghezza prevalente rispetto alle dimensioni della sezione.
Da questa definizione nascono più classificazioni per la trave a seconda che
la sezione si mantenga costante (trave prismatica) oppure vari la sua forma
(trave a sezione variabile) in genere con continuità. Si parla di trave piana se la
linea d’asse è una curva piana, di asta se l’asse è rettilineo. Si possono inoltre
avere travi spaziali, travi curve (archi, travi ad anello, travi elicoidali, ecc). Con
il termine telaio si indica la composizione di più aste in una struttura piana.
Negli schemi strutturali, la trave viene rappresentata disegnando semplicemente la sua linea d’asse ed a parte, quando occorre, la sezione, che può
assumere forme diverse in base al materiale con cui è realizzata la trave ed
all’impiego a cui viene destinata.
Di seguito vengono riportati alcuni tipi di sezioni comunemente impiegate
nell’ingegneria strutturale
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
13
ISOSTATICHE
sezioni compatte sezioni aperte di spessore sottile sezioni chiuse o tubolari
(acciaio, legno, ecc..) (profilati metallici)
I profilati metallici a doppio T (o ad I) ad ali strette (IPE) o ad ali larghe
(HE) trovano largo impiego nelle costruzioni civili e meccaniche. Il numero che
segue la sigla indica l’altezza H della sezione in mm (80, 100, 120,…, 600). Dei
profili HE vengono realizzate le serie alleggerita (A), normale (B) e rinforzata
(M), caratterizzate da spessori crescenti.
b=H/2
B=H
H
IPE 200
HE 200 (A,B,M)
Nell’ingegneria strutturale vengono utilizzati anche alcuni tipi di profili
sottili formati a freddo. Si tratta di elementi ottenuti formando a freddo una
lamiera d’acciaio, attraverso procedimenti di stampaggio o di laminazione
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
ISOSTATICHE
14
2.1. Vincoli e reazioni vincolari
I vincoli condizionano il numero di gradi di libertà del corpo a cui sono
applicati o, più in generale, di un sistema meccanico. In base al numero di gradi
di libertà che sottraggono, si possono classificare in vincoli semplici, doppi o
tripli. Si possono inoltre suddividere in
• esterni od interni al sistema, se sottraggono dei gradi di libertà ad un solo
corpo o mettono in relazione i gradi di libertà di due o più corpi;
• puntiformi o continui se applicati in un solo punto del corpo oppure lungo una
linea o una superficie continua
• bilaterali o monolaterali se impediscono il movimento in un solo verso o in
entrambi i versi;
• lisci o con attrito, se i movimenti consentiti dal vincolo avvengono liberamente o subiscono un impedimento parziale;
• fissi o cedevoli se impediscono il movimento o lo limitano ad un valore
assegnato;
I vincoli che considereremo sono puntiformi, bilaterali e privi di attrito.
A ciascuna componente di movimento (spostamento o rotazione) impedita
dal vincolo corrisponde un’azione (forza o coppia) esercitata dal vincolo sul
corpo, denominata reazione vincolare.
2.2.1 Vincoli semplici
Il carrello è un vincolo semplice in grado di impedire la traslazione del
punto P0 in cui viene applicato nella direzione ortogonale al suo piano di scorrimento (Fig. 1), sottraendo quindi un solo grado di libertà ad un corpo rigido.
Tale vincolo consente, invece, la traslazione nella direzione di scorrimento e la
rotazione del corpo attorno a P0.
Pertanto, se il piano di scorrimento è inclinato di un angolo α rispetto alla
direzione dell’asse x1, la condizione di vincolo imposta dal carrello è:
u 20 = u10 tg α
In particolare, per α = 0° si ha u 20 = 0, mentre per α = 90° si ha u10 = 0. Si
osservi che il corpo può solo subire una rotazione attorno ad un qualsiasi punto
dell’asse del carrello, che rappresenta il centro di istantanea rotazione (c.i.r.).
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
15
ISOSTATICHE
Per impedire la componente di spostamento il carrello è in grado di reagire
con un forza R la cui retta d’azione passa per il punto P0 in cui è applicato ed ha
la stessa direzione dello spostamento impedito. L’intensità ed il verso della
reazione vincolare R dipendono dalle forze attive applicate al corpo.
La biella o pendolo è un vincolo semplice costituito da un’asta incernierata
alle estremità (Fig. 2). Tale vincolo è equivalente al carrello nell’ambito di
spostamenti infinitesimi, tali cioè da poter confondere un arco di cerchio con la
tangente.
x2
R
R
u0
u0
P0
x1
α
P0
c.i.r.
c.i.r.
Fig. 1
Fig. 2
2.2.2 Vincoli doppi
La cerniera è un vincolo doppio che impedisce lo spostamento del punto P0
in cui viene applicata (Fig. 3), ovvero:
u10 = 0
u 20 = 0
Tale vincolo sottrae due gradi di libertà al corpo rigido cui viene applicato,
consentendo soltanto la rotazione nel piano attorno al punto P0, che rappresenta
quindi il centro di istantanea rotazione.
Per impedire lo spostamento del punto P0 la cerniera è in grado di reagire
con un forza R, di componenti R1 ed R2 secondo un sistema di assi ortogonali, la
cui retta d’azione passa per P0. L’intensità, la direzione ed il verso della reazione
vincolare R dipendono dalle forze attive applicate al corpo.
Anche l’incastro scorrevole, o doppio pendolo, è un vincolo doppio che
impedisce la rotazione e la traslazione nella direzione degli assi dei pendoli del
punto P0 (Fig. 4), ovvero
u 20 = u10 tg α
ϕ=0
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
16
ISOSTATICHE
Tale vincolo, applicato ad un corpo rigido, consente solo la traslazione dello
stesso nella direzione ortogonale agli assi delle bielle. Pertanto, il centro di
istantanea rotazione è il punto improprio (all’infinito) nella direzione degli assi
delle bielle.
Per impedire la rotazione e lo spostamento del punto P0 nella direzione degli
assi dei pendoli, il doppio pendolo reagisce con un coppia C ed una forza R che
ha la stessa direzione dello spostamento impedito. La retta d’azione della risultante di C ed R in generale non passa per P0, ma ad una distanza d = C/R da P0.
Le intensità ed i versi di C ed R dipendono dalle forze attive applicate al corpo.
u0
x2
x2
c.i.r. ≡ P0
R2
c.i.r.→∞
P0
R1
C
α
x1
x1
Fig. 4
Fig. 3
R
2.2.3 Vincolo triplo
Infine, l’incastro è un vincolo triplo che non consente alcun movimento del
punto P0 in cui viene applicato, sottraendo quindi i 3 gradi di libertà del corpo
rigido nel piano (Fig. 5), per cui:
u10 = 0
u 20 = 0
ϕ=0
Pertanto, non esiste alcun centro di istantanea rotazione per il corpo. Per
impedire qualsiasi movimento del punto P0 l’incastro è in grado di reagire con
un coppia C ed una forza R di componenti R1 ed R2. Le intensità ed i versi di C,
R1 ed R2 dipendono dalle forze applicate al corpo.
R2
P0
R1
C
Fig. 5
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
17
ISOSTATICHE
2.2.4 Molteplicità di vincolamento e gradi di libertà soppressi
c.i.r
c.i.r.→ ∞
Con m si indica la molteplicità di vincolamento, pari alla somma del numero
di vincoli semplici applicati al corpo e quindi anche al numero delle componenti
di reazione vincolare.
Il numero di gradi di libertà soppressi dai vincoli s può essere diverso dalla
molteplicità m se i vincoli vengono mal disposti, come nel caso in cui due
vincoli sopprimono gli stessi gradi di libertà del corpo.
Due bielle applicate ad un corpo rigido, con assi non coincidenti,
equivalgono ad una cerniera ideale applicata nel punto di intersezione dei loro
assi (Fig. 6a). Nel caso in cui le bielle siano parallele (Fig. 6b), il solido può
traslare nella direzione ortogonale agli assi delle bielle, ovvero può ruotare
attorno al punto improprio nella dirzione degli assi delle bielle. In tal caso, le
due bielle sono equivalenti ad un doppio pendolo. Infine, due bielle o due
carrelli disposti sullo stesso asse (Fig. 6c) sottraggono un solo grado di liberta al
corpo, che è in grado di ruotare attorno ad un punto qualsiasi dell’asse comune e
quindi anche di traslare nella direzione ortogonale a tale asse.
Tre bielle (o tre carrelli) applicate ad un corpo rigido, con assi non
concorrenti in uno stesso punto sottraggono i tre gradi di liberta di un corpo
rigido (Fig. 7a). Nel caso in cui i tre assi siano concorrenti in uno stesso punto, il
corpo può ancora ruotare attorno a tale punto (Fig. 7b). Se il punto è improprio il
corpo può traslare nella direzione ortogonale agli assi (Fig. 7c).
m=2
s =2
m=2
s =2
Fig. 6a
Fig. 6b
c.i.r
m=2
s =1
Fig. 6c
m=3
s =3
Fig. 7a
m=3
s =2
Fig. 7b
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
c.i.r.→ ∞
c.i.r
m=3
s =2
Fig. 7c
TRAVI
18
ISOSTATICHE
2.2.5 Vincoli interni per sistemi formati da più corpi
Per un sistema meccanico formato da n corpi rigidi, il numero globale di
gradi di libertà è g = 3 n. In questo caso è possibile distinguere tra vincoli esterni
e vincoli interni. Questi ultimi collegano tra loro due o più corpi e ne
impediscono alcuni movimenti relativi, esercitando tra i corpi collegati delle
reazioni vincolari mutue, cioè uguali ed opposte.
Per un vincolo interno che collega due corpi, si definisce centro di rotazione
relativo (c.r.r.) il punto attorno al quale può ruotare uno dei due corpi quando
l’altro rimane immobile e si considera la presenza del solo vincolo interno.
Una biella interna introduce un grado di vincolamento (m = 1), impedendo
lo spostamento relativo nella direzione del suo asse dei punti che collega. Ad
esempio, per i punti A e B collegati da una biella orizzontale (Fig. 8a), si ha:
u1A = u1B
Per impedire tale spostamento relativo, i due corpi si trasmettono attraverso
la biella una forza mutua R la cui retta d’azione coincide con l’asse della biella.
Il c.r.r. può essere un punto qualsiasi su tale asse.
Una cerniera interna introduce due gradi di vincolamento (m = 2),
impedendo lo spostamento relativo dei punti A e B che collega (Fig. 8b), cioè:
u1A = u1B
u 2A = u 2B
Per impedire tale spostamento relativo, i due corpi si trasmettono attraverso
la cerniera una forza mutua R, di componenti R1 ed R2, la cui retta d’azione
passa per il punto in cui è disposta la cerniera (A ≡ B), che coincide con il c.r.r.
Anche un doppio pendolo interno introduce due gradi di vincolamento (m =
2), impedendo sia lo spostamento relativo nella direzione degli assi dei pendoli
dei punti che collega che la rotazione relativa (Fig. 8c), cioè:
ϕA = ϕB
u1A = u1B
Per impedire tali movimenti relativi, i due corpi si trasmettono attraverso il
doppio pendolo una forza R avente la stessa direzione dello spostamento
impedito ed una coppia C mutue. La retta d’azione della risultante in generale
non passa per il punto in cui è applicato, ma ad una distanza d = C/R da esso. Il
c.r.r. è il punto improprio (all’infinito) nella direzione degli assi delle bielle.
c.r.r.
R
A
B
R
C
B
R
R
A
R
c.r.r. ≡ A ≡ B
Fig. 8a
Fig. 8b
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
C
A
B
c.r.r. → ∞
Fig. 8c
R
TRAVI
19
ISOSTATICHE
1.3.6 Cerniere che collegano più di due corpi
Una cerniera interna che collega i punti A, B e C di 3 corpi (Fig. 9)
introduce le seguenti condizioni sugli spostamenti dei punti collegati:
uA = uB
uA = uC
a cui corrisponde una molteplicità di vincolamento m = 4. Dal punto di vista
statico, ciascun corpo scambia con la cerniera una forza mutua la cui retta
d’azione passa per la cerniera. Affinché la cerniera risulti in equilibrio, la somma
vettoriale di tutte le forze che la cerniera trasmette ai corpi deve annullarsi.
In generale, una cerniera interna che collega i punti A, B, …, N di n corpi
introduce le seguenti m = 2 (n − 1) condizioni di vincolamento:
uA = uB
uA = uC
uA = u N
…
Se un vincolo è al tempo stesso sia interno che esterno, la corrispondente
molteplicità di vincolamento va calcolata tenendo conto di entrambi gli effetti
esplicati (Fig. 10).
mi = 4
A
B
me = 2
mi = 2
m = me + mi = 4
C
Fig. 9
Fig. 10
Il numero minimo di vincoli necessario per impedire atti di moto rigido ad
un sistema meccanico formato da n corpi risulta pari al numero dei suoi gradi di
libertà, cioè m = g = 3n come nel sistema in Fig. 11. Tuttavia anche nel caso di
sistemi formati da più corpi, i vincoli possono essere mal disposti. In tal caso,
anche se è verificata la condizione m = g = 3n si ha s < g, cioè il sistema
conserva ancora la possibilità di effettuare degli atti di moto rigido, come per i
sistemi nelle Fig. 12a, b.
2
2
1
2
2
g = m= s = 9
Fig. 11
g =6
m= 6
Fig. 12a
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
s =5
g =6
m= 6
s =5
Fig. 12b
TRAVI
20
ISOSTATICHE
Per controllare se il sistema di vincolamento è efficace si può far riferimento
ai seguenti teoremi delle catene cinematiche
I teorema: CNS affinché sia possibile un atto di moto rigido per un sistema
meccanico formato da due corpi è che i due c.i.r. ed il c.r.r. siano allineati.
II teorema: CNS affinché sia possibile un atto di moto rigido per un sistema
meccanico formato da tre o più corpi è che per almeno una terna di corpi che
compongono il sistema i tre c.r.r. siano allineati.
Si osservi che la condizione del I teorema risulta verificata per i sistemi nelle
Fig. 12a, b. Infatti, nel caso di Fig. 12a le due cerniere esterne (c.i.r.) e quella
interna (c.r.r.) risultano allineate, mentre nel caso di Fig. 12b le due cerniere
esterne (c.i.r.) risultano allineate con il c.r.r. del vincolo interno, che coincide
con il punto improprio nella direzione orizzontale, la stessa individuata dalle due
cerniere. In tal caso il sistema si definisce labile.
Lo studio dei sistemi labili (catene cinematiche) viene approfondito
nell’ambito del corso di Meccanica applicata alle macchine, mentre la Scienza
delle costruzioni si interessa di sistemi meccanici in condizioni di equilibrio.
2.6 Bilancio dei vincoli
Un solido o, più in generale, un sistema meccanico si definisce:
labile
se s < g, cioè se i vincoli non sopprimono tutti i gradi di libertà del
sistema. Con l = g − s si indica il grado di labilità del sistema. In tal
caso, esiste almeno un sistema di forze attive che i vincoli non
riescono ad equilibrare (Fig.13a). Per tale sistema di forze l’equilibrio
è impossibile ed il corpo si metterà in movimento. Per quei particolari
sistemi di forze attive per i quali l’equilibrio risulta possibile, il
problema si definisce staticamente determinato (Fig. 13b), in quanto
bastano le sole equazioni di equilibrio per determinare le reazioni
vincolari.
g =3
m= s = 2
F
R=F
F
Fig. 13a
Fig. 13b
isostatico se m = g = s, cioè se i vincoli sono in numero strettamente necessario
per sopprimere tutti i gradi di libertà del sistema (m = g) e sono anche
ben disposti (m = s). In tal caso, le componenti di reazione vincolare
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
21
ISOSTATICHE
incognite corrispondenti alle condizioni di vincolo sono pari al
numero delle equazioni d’equilibrio e possono perciò essere
determinate in modo univoco, ovvero, i vincoli sono in grado di
sviluppare uno ed un sol sistema di reazioni vincolari capace di fare
equilibrio alle forze attive (Fig.14). Pertanto, qualunque sia il sistema
di forze attive, il problema risulta sempre staticamente determinato.
g = m= s = 3
F
Fig. 14
iperstatico se m > g = s, cioè se che le componenti di reazione vincolare sono in
numero (m) superiore a quello delle equazioni di equilibrio (g). In tal
caso, i vincoli sono in grado di sviluppare infiniti sistemi di reazioni
vincolari tutti atti ad equilibrare il sistema di forze attive (Fig.15).
Se con i = m − g si indica il grado di iperstaticità del sistema, si
può pensare infatti di fissare ad arbitrio un numero i di componenti di
reazione vincolare incognite e ricavare le rimanenti g incognite dalle
equazioni di equilibrio. In tal caso, il problema risulta staticamente
indeterminato ed il grado di indeterminazione è misurato dal numero i
di reazioni vincolari eccedenti quello delle equazioni disponibili, che
ammettono quindi ∞i soluzioni.
g= s =3
m= 4
F
Fig. 15
m= g = 3
s =2
F1
F2
Fig. 16
Si osservi che il solido in Fig 16 risulta labile (s < g) e, infatti, per il sistema
di forze attive costituito dalla sola F1 l’equilibrio è impossibile, poiché i vincoli
non possono fornire alcuna componente di reazione vincolare in direzione
orizzontale. Tuttavia, i vincoli sono in grado di sviluppare ∞1 sistemi di reazioni
vincolari tutti atti ad equilibrare il sistema di forze attive costituito dalla sola F2.
In tal caso, il problema risulta staticamente indeterminato.
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
22
ISOSTATICHE
Le reazioni vincolari di un sistema meccanico soggetto ad assegnate forze
attive sono in genere incognite. Per problemi staticamente determinati le
reazioni vincolari si possono determinare imponendo l’equilibrio di tutte le
forze, sia forze attive che reazioni vincolari.
Prima di procedere al calcolo delle reazioni vincolari occorre stabilire se il
problema è in effetti staticamente determinato, controllando che non si tratti
invece di una struttura iperstatica. In tal caso, l’ipotesi di corpo rigido rende
indeterminato il problema, che può risolversi solo tenendo conto della
deformabilità dei corpi. Per questo motivo lo studio della Scienza delle
Costruzioni è basato sulla meccanica dei solidi deformabili. La conoscenza delle
deformazioni poi è utile ai fini della verifica della funzionalità della struttura e
consente quei riscontri sperimentali che si effettuano in sede di collaudo.
2.7 Calcolo delle reazioni vincolari per via analitica.
Per effettuare il calcolo delle reazioni vincolari si sostituiscono ai vincoli,
sia interni che esterni, le corrispondenti m componenti di reazione vincolare
incognite, con versi di tentativo. Ai corpi collegati dai vincoli interni si
applicano delle reazioni vincolari mutue, cioè uguali ma con verso opposto.
Si scrivono quindi g equazioni di equilibrio, due alla traslazione ed una alla
rotazione attorno ad un polo, scelto arbitrariamente, per ciascun corpo in cui
viene suddivisa la struttura.
Poiché per strutture isostatiche si ha m = g, il sistema formato dalle
equazioni di equilibrio fornisce i valori di tutte le reazioni vincolari incognite
con il verso corretto, contrario a quello ipotizzato se il segno è negativo.
l
l
F
F
h
h
HA
A
VA
HA + F = 0
B
F
VB
VA + VB = 0
A
Fh/l
VB l − F h = 0
da cui si ottengono le reazioni vincolari
VB = Fh/l
HA = − F
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
VA = − Fh/l
B
Fh/l
TRAVI
23
ISOSTATICHE
Si osservi che sotto l’azione dei carichi, la trave non si comporta esattamente
come un corpo rigido, ma tende a deformarsi e l’equilibrio si realizza nella
configurazione deformata (i). Poiché le componenti di movimento dipendono
dai carichi e sono incognite a priori, le condizioni di equilibrio costituirebbero
un problema non-lineare di difficile soluzione (si osservi che si modificano i
bracci delle forze). Tuttavia, poiché lo studio dei sistemi di travi viene effettuato
nell’ambito dell’ipotesi di spostamenti e deformazioni infinitesime, risulta
possibile valutare le condizioni di equilibrio direttamente sulla configurazione
indeformata (ii), come per i corpi rigidi, e ricavare le reazioni vincolari
attraverso la soluzione di un sistema algebrico lineare.
i)
A
l /2
ii)
P
B
⇒H
P
A
A
VA
l /2
α
B
HA – P cos α = 0
VA + VB – P sin α = 0
VB l – (P sin α) l/2 = 0
VB
In tal caso, per il calcolo delle reazioni vincolari nelle strutture isostatiche
vale il principio di sovrapposizione degli effetti. D’altra parte, la determinazione
delle reazioni vincolari nelle strutture iperstatiche dipende anche dal
comportamento meccanico del materiale. Nel caso in cui tale comportamento sia
di tipo non-lineare si perde la possibilità di sovrapporre gli effetti indotti da
carichi diversi. Nel presente corso, tuttavia, si farà riferimento esclusivamente ad
un comportamento del materiale di tipo elastico lineare.
2.1. Calcolo delle reazioni vincolari in semplici travi isostatiche
a)
A
P
VA
HA = 0
VB
B
VA + VB − P = 0
VBℓ – Pa = 0
HA
a
(polo A)
b
l
dove ℓ = a + b. Quindi:
VA = Pb/ℓ
VB= Pa/ℓ
Se P agisce a metà della trave (a = b = ℓ/2) allora VA = VB = P/2.
Se P agisce su A (a = 0, b = ℓ) allora VA = P e VB = 0.
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
q
b)
HA = 0
B
A
24
ISOSTATICHE
VA + VB − qℓ = 0
HA
VBℓ – qℓ2/2 = 0
VA
VB
l
(polo A)
quindi:
VA = VB = qℓ/2
Ai fini del calcolo delle reazioni vincolari nelle strutture isostatiche, alle
forze che agiscono su ciascun corpo è possibile sostituire la loro risultante. Nel
caso in fig. b), è possibile sostituire al carico distribuito q lungo il tratto di
lunghezza ℓ la risultante Q = qℓ applicata ad ℓ/2. Le reazioni vincolari si
possono pertanto ricavare utilizzando la soluzione del caso a).
c)
V
P
M
H=0
V−P=0
M − Pℓ = 0
H
l
quindi:
V=P
d)
q
M
(polo A)
M = Pℓ
H=0
V − qℓ = 0
H
V
l
M − qℓ2/2 = 0
quindi:
V = qℓ
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
M = qℓ2/2
(polo A)
TRAVI
e)
VA
HA – RB sin 30° = 0
30°
RB
P
B
A
25
ISOSTATICHE
HA
VA – RB cos 30° + P =0
C
30°
quindi:
l/2
l
VA ℓ – Pℓ/2 = 0 (polo B)
VA = P/2
HA = 3 P/2
RB = 3 P
f)
B
RA + RB – P sin 60° = 0
60°
P
RBℓ/cos 30°– Pℓ/2 = 0
RB
RA
quindi:
30°
A
QA
QA – P cos 60° = 0
l/2
l/2
l/2
l/2
QA = P/2
RA = RB = 3 P/4
g)
HA = 0
q
A
[
HA
x
VA
C
B
]
x
VA + VB – qℓ/2 =0
VB ℓ – qℓ2/8 = 0
VB
(polo A)
quindi:
VA = 3qℓ/8 = 0.375 qℓ
VB = qℓ/8 = 0.125 qℓ
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
(A)
TRAVI
26
ISOSTATICHE
2.2. Azioni interne
i
Si consideri una n+1
trave in equilibrio sotto i carichi {F }i=1,2,…n e le reazioni
0
vincolari F = RA e F = RB.
F
0
F = RA
1
A
F
2
F
3
C
B
4
F = RB
x
In condizioni di equilibrio, il sistema di forze agenti sulla trave verifica le
equazioni cardinali della statica
4
4
∑F = 0
∑MiC = 0
i
i =0
(1)
i =0
i
dove MiC è il momento della forza F rispetto al baricentro della sezione C,
scelto come polo per valutare i momenti di tutte le forze.
Si pensi di suddividere la trave attraverso un taglio effettuato secondo una
generica sezione C individuata dall'ascissa x corrente lungo la trave da A verso
B. In questa situazione è evidente che i sistemi di forze applicati a ciascuna delle
due parti non risultano più in equilibrio. Per ripristinare l’equilibrio di ciascuna
parte è necessario applicare alle due superfici ottenute sezionando la trave le
azioni mutue che le due parti si trasmettevano attraverso la sezione C quando
erano unite. Tali azioni, costituite dalla forza R applicata nel baricentro della
sezione C e dal momento M valutato rispetto al baricentro, mantengono in
equilibrio ciascuna delle due parti e vengono definite azioni interne,
F1
M
0
F
A
F2
C
x
R
F3
4
R′
C
M′
x
B
F
In condizioni di equilibrio, il sistema di forze agenti sul tratto AC deve
verificare le condizioni
1
∑ Fi + R = 0
i =0
1
∑MiC + M = 0
(2)
i =0
analogamente per il sistema di forze agenti sul tratto BC deve aversi
4
∑Fi + R′ = 0
i=2
4
∑MiC + M′ = 0
i=2
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
(3)
TRAVI
27
ISOSTATICHE
Sommando le equazioni (2) e (3) ed utilizzando le condizioni di equilibrio
per tutta la trave si ottiene
R + R′ = 0
M + M′ = 0
Pertanto, le azioni interne scambiate tra le due parti di trave attraverso la
generica sezione C sono mutue, cioè uguali ed opposte, risultando R′ = − R e
M′ = − M in accordo con il principio di azione e reazione. Si ha inoltre
R = − R′ =
4
∑ Fi
M = − M′ =
i=2
4
∑MiC
i=2
Per cui le azioni interne R ed M agenti sulla sezione C del tratto AC (che
precede la sezione C) non sono altro che la risultante del sistema di forze esterne
e reazioni vincolari che agiscono sul tratto CB (che segue la sezione C) ed il loro
momento risultante valutato rispetto al baricentro della sezione C.
Analogamente, le azioni interne R′ ed M′ agenti sulla sezione C del tratto
CB sono la risultante ed il momento risultante di tutte le forze che agiscono sul
tratto AC che precede la sezione considerata, ovvero
R′ = − R =
1
∑F
M′ = − M =
i
i =0
1
∑MiC
i =0
Per travi piane caricate nel loro piano, la forza R si può decomporre in una
componente N diretta secondo la normale alla sezione ed una componente T
ortogonale all’asse della trave, definite rispettivamente sforzo normale e sforzo
di taglio. Il momento M valutato rispetto al baricentro della sezione viene
definito momento flettente. Le componenti N, T ed M dell’azione interna
vengono anche definite caratteristiche della sollecitazione.
Per i segni delle caratteristiche della sollecitazione, si assume:
N > 0 se uscente dal materiale (trazione), ovvero N < 0 se entrante nel
materiale (compressione);
T > 0 se fa ruotare in senso orario il materiale a cui è applicato;
M > 0 se tende le fibre a destra dell’ascissa x corrente lungo la trave
(ovvero quelle inferiori per x che va da A verso B).
T
M
x
C′
N
T
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
C′′
N
M
TRAVI
28
ISOSTATICHE
2.2.1. Calcolo delle caratteristiche della sollecitazione
Per una struttura aperta, note le reazioni vincolari, e quindi tutte le forze ad
essa applicate, è possibile calcolare le caratteristiche della sollecitazione nella
generica sezione C, individuata dalla ascissa x, attraverso due procedimenti
equivalenti.
Si osservi che lo sforzo normale N e lo sforzo di taglio T nella sezione C,
agenti sulla materia che precede la sezione, corrispondono alle componenti in
direzione normale e tangente alla sezione C′ della risultante di tutte le forze che
agiscono nel tratto CB che segue la sezione C. Similmente, il momento flettente
M coincide con il momento risultante delle stesse forze, calcolato rispetto al
baricentro della sezione C, ovvero con riferimento alla figura sottostante:
N=
4
∑F
i =2
T=
i
N
∑F
M=
i
T
i =2
1
F
RA=F
4
4
∑MiC
i=2
F
2
F
3
M
0
x
A
4
RB=F
N
T
C
B
dove si sono considerati i versi positivi delle caratteristiche della sollecitazione
N, T ed M applicate alla materia che precede la sezione.
Le stesse azioni interne, pensate agenti sulla materia che segue la sezione C,
si possono calcolare con le forze che agiscono prima della sezione considerata,
ovvero nel tratto AC (più conveniente se in minor numero). Occorre però tener
presente che in questo caso si invertono i versi positivi delle caratteristiche della
sollecitazione applicate alla materia che segue la sezione:
N=
1
F
∑
i =0
T=
i
N
F
RA=F
1
1
1
F
∑
i =0
M=
i
T
T
∑MiC
i =0
F
2
3
F
0
4
x
N M
A
RB=F
C
B
dove si sono considerati i versi positivi delle caratteristiche della sollecitazione
applicate alla materia che segue la sezione.
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
29
ISOSTATICHE
2.2.2. Esempi di calcolo delle azioni interne in semplici travi isostatiche
a)
a
AC (0 < x < a):
N(x) = 0
A
[
M(x) = Pbx/ℓ
CB (a < x < ℓ):
N(x) = 0
T(x) = −Pa/ℓ
a
M(x) = P (ℓ − x)
l
P
Pb/l
T(x) = Pb/ℓ
x
Pa/l
B
]
C
x
Pb/l
+
T)
b
Pa/l
M)
Pab/l
b)
q
[
A
AB (0 < x < ℓ):
N(x) = 0
ql
−qx
T(x) =
2
ql
q x2
x−
M(x) =
2
2
B
x
ql
2
l
ql
2
+
T)
ql
2
ql2
8
M)
c)
ql
2
P
P
AB (0 < x < ℓ):
]
N(x) = 0
T(x) = P
M(x) = − P(ℓ − x)
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
A
Pl
T)
P
M)
Pl
x
B
l
+
TRAVI
30
ISOSTATICHE
d)
ql
2
AB (0 < x < ℓ):
2
]
A
q
x
l
ql
N(x) = 0
T(x) = q (ℓ − x)
q
M(x) = − (ℓ − x)2
2
T)
ql
M)
ql
2
+
2
f)
l/2
l/2
B
60°
P
√3 P
4
30° x
A
√3 P
4
x
P/2
√3 P
4
P/2
N)
+
Pl/4
T)
M)
AC (0 < x < ℓ/
3 ):
BC (0 < x < ℓ/
3 ):
P
2
N(x) = 0
T(x) =
3
P
4
T(x) = −
3
P
4
M(x) =
3
Px
4
M(x) = −
3
Px
4
N(x) = −
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
B
TRAVI
31
ISOSTATICHE
f)
AB (0 < x < ℓ):
N(x) = − 3 P / 2
T(x) = − P/2
M(x) = − P x / 2
√3 P
P/2
A
P
B
[
√3
P
2
]
x
x
30°
l
C
l/2
BC (0 < x < ℓ/2):
x
N(x) = 0
N)
T(x) = P
√3 P/2
M(x) = − P (ℓ/2 − x)
T)
+
P/2
P
Pl/2
M)
g)
l/2
AC (0 < x < ℓ/2):
q
N(x) = 0
A
T(x) = 0.375 qℓ − q x
x2/2
[
x
M(x) = 0.375 qℓ x − q
0.375 ql
CB (ℓ/2 < x < ℓ):
N(x) = 0
T(x) = − 0.125 qℓ
l/2
C
B
]
x
0.125 ql
0.375 ql
T)
+
0.125 ql
M)
M(x) = 0.125 qℓ (ℓ − x)
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
0.063 ql2
0.070 ql2
TRAVI
32
ISOSTATICHE
2.3 Equazioni indefinite di equilibrio per le travi rettilinee
In condizioni di equilibrio, ciascuna parte della trave deve risultare in equilibrio
sotto l’azione delle forze esterne e delle azioni interne trasmesse attraverso le
sezioni che delimitano la parte considerata.
In particolare, se si valutano le condizioni di equilibrio per un elemento
infinitesimo di trave rettilinea di lunghezza dx si ottengono delle relazioni
differenziali tra le componenti dell’azione interna ed i carichi distribuiti agenti
lungo la trave.
q(x)
M T
[ ]
x
N + dN − N = 0
M+dM
N+dN
dx T+dT
N
dx
q dx
T + dT − T + q dx = 0
M + dM − M − T dx = 0
ovvero
dM
=T
dx
dT
=−q
dx
N = cost
Tali relazioni prendono il nome di equazioni indefinite di equilibrio per le travi
ad asse rettilineo. Dalle ultime due equazioni si ricava
d 2M
dx 2
=−q
La derivata del momento flettente coincide quindi con il taglio, mentre la
derivata del taglio coincide, a meno del segno, con il carico distribuito q(x), che
a sua volta è la derivata seconda del momento flettente, cambiata di segno. Di
conseguenza, il momento flettente ha un massimo o un minimo in corrispondenza della sezione in cui si annulla il taglio. Inoltre, se il carico è diretto verso il
basso la concavità del diagramma del momento flettente è sempre rivolta verso
l’alto, e viceversa. Valgono quindi le relazioni riportate nella seguente tabella.
q
nullo
costante
lineare
T
M
costante
lineare
lineare
parabolico
parabolico
cubico
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
33
ISOSTATICHE
Nelle sezioni in cui sono applicate delle forze o delle coppie concentrate si
ha una discontinuità delle azioni interne. Infatti, dall’equilibrio di un elemento
infinitesimo di trave su cui agisce un’azione concentrata si ha
P
Q
T1
N1
M1
C
M2
T2
N2
N2 – N1 = − Q
T2 – T1 = −P
M2 – M1 = −C
Lo studio delle azioni interne va quindi eseguito separatamente per ciascun
tratto in cui queste variano con continuità, compreso quindi tra due sezioni in cui
agiscono forze o coppie concentrate (sia reazioni vincolari che forze assegnate)
o si ha una discontinuita del carico distribuito.
2.3.1 Alcune proprietà dei diagrammi del taglio e del momento flettente
Per facilitare il tracciamento (e il controllo) dei diagrammi di taglio e momento
flettente, si può far uso delle seguenti proprietà:
• nei tratti in cui non agiscono carichi trasversali il diagramma del taglio è
costante e quello del momento è lineare;
• nei tratti in cui agiscono carichi trasversali uniformemente distribuiti il
diagramma del taglio è lineare e quello del momento è parabolico;
• in corrispondenza di una forza trasversale concentrata il diagramma del taglio
presenta una discontinuità (pari alla forza stessa) e quello del momento
cambia pendenza, ma rimane continuo;
• in corrispondenza di una coppia concentrata il diagramma del taglio non varia
e quello del momento presenta una discontinuità (pari alla coppia stessa);
• in corrispondenza degli appoggi di estremità e delle cerniere il diagramma del
momento si annulla (a meno che non siano applicate coppie concentrate).
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
34
ISOSTATICHE
2.4 Calcolo delle reazioni vincolari nelle strutture con vincoli interni
Il numero delle componenti delle reazioni vincolari sia interne che esterne
nelle strutture isostatiche, pari alla molteplicità di vincolamento m = me + mi,
eguaglia quello delle equazioni di equilibrio, pari a g. Il loro calcolo si può
effettuare secondo uno dei seguenti procedimenti:
1) analisi statica
Si suddivide la struttura nelle sue n parti rimuovendo tutti i vincoli, sia
interni che esterni, e sostituendo ad essi le corrispondenti reazioni vincolari
incognite, prese inizialmente con versi arbitrari. In base al principio di azione e
reazione, le reazioni dei vincoli interni vanno considerate con versi mutui.
Per ciascuna parte di struttura si scrivono le 3 equazioni di equilibrio in
modo da ottenere un sistema di m = g = 3n equazioni lineari nelle incognite
cercate. Il segno ottenuto in soluzione determina il verso delle reazioni vincolari.
q
A
B
C
l
l
q
MA
q
HC
A
HA
g =6
me = 4
mi = 2
HC
VC
VA
B
C
C
VC
VB
Le equazioni di equilibrio per i due tratti forniscono:
C)
HA + HC = 0
HC = 0
VA – VC – qℓ = 0
VB + VC – qℓ = 0
2
MA – VA l + qℓ /2 = 0
C)
2
VB ℓ – qℓ /2 = 0
da cui si ricavano le m reazioni vincolari sia esterne che interne
HA = HC = 0
VB = VC = 0.5 qℓ
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
VA = 1.5 qℓ
MA = qℓ
2
TRAVI
35
ISOSTATICHE
Nel caso sia presente un doppio pendolo interno in C si ha:
l
l
MA
g =6
me = 4
mi = 2
q
A
HA
B
C
VA
VB
q
MA
q
HC HC
A
HA
C
MC
MC
B
C
VB
VA
Le equazioni di equilibrio per i due tratti forniscono:
C)
HA + HC = 0
HC = 0
VA – qℓ = 0
VB – qℓ = 0
2
MA + MC – VA ℓ + qℓ /2 = 0 C)
2
VB ℓ – qℓ /2 – MC = 0
da cui si ricavano le m reazioni vincolari sia esterne che interne
HA = HC = 0
VB = VA = qℓ
MA = 0
2
MC = qℓ /2
Per determinare le componenti dell’azione interna nelle strutture isostatiche
aperte è, tuttavia, sufficente conoscere le sole reazioni vincolari esterne,
riducendo quindi il numero delle incognite da m ad me. A tal fine è conveniente
impiegare il metodo presentato nel paragrafo seguente.
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
36
ISOSTATICHE
2) metodo delle equazioni di equilibrio ausiliarie (e.e.a)
Si sostituiscono solo ai vincoli esterni le corrispondenti me componenti di
reazione vincolare, con versi di tentativo. Per determinare tali incognite si
scrivono 3 equazioni di equilibrio globale (e.e.g.) per l’intera struttura e si
cercano me − 3 equazioni di equilibrio ausiliarie (e.e.a.) attraverso le quali si
richiede il rispetto delle condizioni statiche imposte dai vincoli interni.
In particolare, ciascuna equazione ausiliaria corrisponde alla condizione di
equilibrio per una delle due parti in cui il vincolo interno suddivide la struttura,
rispetto alla azione (forza o momento) non trasmessa dal vincolo interno.
Si ottiene così un sistema di me equazioni lineari nelle me componenti
incognite delle sole reazioni vincolari esterne.
F2
F1
F3
C
A
VA
me = 4
B
VB
3 e.e.g. + 1 e.e.a.
MCA = 0
(o MCB = 0)
A
VA
me = 4
F3
F4
F4
HB
HA
F2
F1
C
C
F4
HB
HA
F3
F2
F1
B
VB
3 e.e.g. + 1 e.e.a.
VCA = 0 (o VCB = 0)
A
HB
HA
VA
MA
me = 5
B
VB
3 e.e.g. + 2 e.e.a.
MCA = 0 (o MCB= 0)
VCA = 0 (o VCB = 0)
dove MCA indica il momento di tutte le forze che agiscono lungo il tratto CA
valutato rispetto al baricentro della sezione C e VCA indica la componente
verticale della risultante di tutte le forze che agiscono lungo il tratto CA
Si noti che è sempre possibile scrivere due diverse e.e.a., una per ciascuna
parte in cui la struttura viene suddivisa dal vincolo interno. Tuttavia, una delle
due e.e.a. risulta sovrabbondante, poiché linearmente dipendente dall’altra e
dalle e.e.g. È quindi sufficiente scrivere assieme alle e.e.g. una sola delle due
e.e.a. possibili o, in altenativa, sostituire al posto di una delle e.e.g. l’altra e.e.a.
La possibilità di scrivere due e.e.a. per ciascun vincolo interno fornisce una
preziosa possibilità utile per la verifica ed il controllo dei risultati ottenuti dalla
soluzione delle equazioni di equilibrio.
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
37
ISOSTATICHE
Nel caso della prima struttura studiata al punto 1) si ha g = 6, me = 4, mi = 2:
l
l
MA
e.e.g.(3):
q
A
HA
HA = 0
B
C
VA
VA + VB – 2qℓ = 0
2
VB
1.5 ql
MA + 2VBℓ – 2qℓ = 0
+
T
-
0.5 ql
e.e.a. (me − 3 = 1):
2
MCB = VBℓ – qℓ /2 = 0
ql2
ql2/8
M
da cui si ricavano le reazioni vincolari esterne
VB = 0.5 qℓ
HA = 0
VA = 1.5 qℓ
MA = qℓ
2
sufficenti per determinare le componenti dell’azione interna lungo la struttura.
Nel caso sia presente un doppio pendolo interno in C si ha g = 6, me = 4, mi = 2:
l
l
MA
q
A
HA
HA = 0
B
C
VA
T ql
e.e.g.(3):
VA + VB – 2 qℓ = 0
2
VB
MA + VB 2ℓ – 2 qℓ = 0
+
e.e.a. (me − 3 = 1):
-
ql
ql2/2
M
VCB = VB – qℓ = 0
da cui si ricavano le reazioni vincolari esterne
HA = 0
VB = qℓ
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
VA = qℓ
MA = 0.
TRAVI
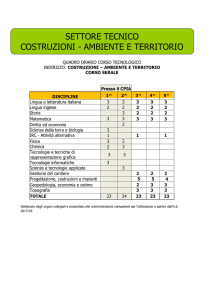
l/2
La struttura in figura è simmetrica ed è caricata
simmetricamente, per cui anche le reazioni
q vincolari e le azioni interne rispetteranno le
condizioni di simmetria. Pertanto, si può
assumere
l/2
[
D
C
x
38
ISOSTATICHE
E
HA = HB = H
l
Ä
Ä
L’ e.e.g. in direzione verticale fornisce
x
x
A
H
H
V = qℓ/2
B
mentre le altre due e.e.g. sono identicamente
verificate per qualsiasi valore di H. Per
determinare H è necessario scrivere una e.e.a.,
fornita dalla cerniera interna in C:
V
V
VA = VB = V
2
MCB = – Hℓ + Vℓ/2 – qℓ /8 = 0
H = qℓ/8
da cui
Note le reazioni vincolari è possibile ricavare le azioni interne
AD (0 ≤ x ≤ ℓ):
N = − qℓ/2
T = − qℓ/8
M = − qℓ x /8
DE (0 ≤ x ≤ ℓ):
N = − qℓ/8
T = qℓ/2 − q x
M = qℓx/2 − qx2/2 – qℓ /8
BE (0 ≤ x ≤ ℓ):
N = − qℓ/2
T = qℓ/8
M = qℓ x /8
2
a cui corrispondono i seguenti diagrammi
ql/2
ql/8
−
N
−
ql/2
−
ql/2
+
ql2/8
ql2/8
−
T−
ql/8
+
M
+
ql/8
Si osservi che per una struttura simmetrica caricata simmetricamente i
diagrammi di N ed M risultano simmetrici, mentre il diagramma di T è
antisimmetrico. Inoltre, le azioni interne sono continue nel tratto DE poiché su
tale tratto non agiscono forze o coppie concentrate. La presenza della cerniera in
C fa si che il momento si annulli in C, come richiesto dalla e.e.a. e non introduce
una discontinuita delle azioni interne.
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
39
ISOSTATICHE
Condizioni di equilibrio dei nodi
Come già considerato, in condizioni di equilibrio, le azioni che agiscono su
ciascuna parte della struttura devono verificare le equazioni di equilibrio. Tali
condizioni devono essere verificate, in particolare, per i nodi. Ciò consente di
controllare se i diagrammi delle caratteristiche della sollecitazione sono stati
tracciati correttamente. È possibile, infatti, controllare l’equilibrio di ciascun
nodo soggetto sia alle azioni interne trasmesse al nodo dalle aste che alle forze
esterne eventualmente agenti sul nodo.
Indicando, ad esempio, le azioni interne che agiscono sul nodo D della
struttura, sul quale non agiscono forze esterne, come risulta dai diagrammi delle
caratteristiche della sollecitazione, si ha
D
ql/2
ql/8
D
ql2/8
ql/8
ql/2
ql2/8
Dal primo schema è possibile verificare l’equilibrio delle forze agenti sul
nodo D, soggetto alle sollecitazioni di sforzo normale e di sforzo di taglio
trasmesse dalle aste al nodo. Dal secondo schema è invece possibile controllare
la condizione di equilibrio alla rotazione dello stesso nodo, soggetto ai momenti
flettenti trasmessi dalle aste al nodo.
È possibile effettuare una verifica simile anche per il nodo E.
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
40
ISOSTATICHE
2.5 Strutture chiuse
La struttura aperta in Fig. 1 è isostatica (m = g = s = 3). Se le sezioni C′ e C′′
vengono saldate come in Fig. 2, la struttura chiusa così realizzata risulterà tre
volte iperstatica, poiché sono state introdotte tre condizioni di vincolo a partirte
da una struttura isostatica. Infatti, unendo insieme le sezioni C′ e C′′ si fanno
coincidere le due componenti di spostamento e la rotazione delle due sezioni,
che prima risultavano indipendenti. Pertanto, una qualsiasi maglia chiusa priva
di sconnessioni presenta tre condizioni di vincolo sovrabbondanti
C’
C
C”
A
A
B
B
Fig. 1
Fig. 2
Dal punto di vista statico, una maglia chiusa introduce 3 gradi di
indeterminazione statica, ad esempio i valori di N, T ed M in una generica
sezione. Noti questi 3 valori, si possono ricavare le caratteristiche della
sollecitazione in qualsiasi altra sezione, calcolando la risultante ed il momento
risultante delle forze che agiscono sulla struttura a partire dalla sezione in cui
agiscono N, T ed M, sino alla sezione considerata.
N
M M
T
]
T
N
]
A
B
Fig. 3
Pertanto, la struttura chiusa in Fig. 2 risulta 3 volte iperstatica per vincoli
interni (o internamente isostatica), pur essendo possibile determinare le reazioni
dei vincoli esterni (per cui la struttura si definisce esternamente isostatica).
Come vedremo, per studiare una struttura iperstatica è dapprima necessario
renderla isostatica rimuovendo dei vincoli, esterni o interni. Per rendere
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
41
ISOSTATICHE
isostatica una maglia chiusa occorre quindi rimuovere 3 condizioni di vincolo
interno, ad esempio effettuando un taglio in corrispondenza di una generica
sezione, come in Fig. 3, oppure introducendo dei vincoli interni. In particolare,
introducendo una cerniera interna si rimuove 1 condizione di vincolo
consentendo la rotazione relativa tra le due sezioni da essa collegata; anche
introducendo un doppio pendolo interno si rimuove 1 condizione di vincolo
consentendo la traslazione relativa nella direzione ortogonale ai pendoli, mentre
introducendo una biella si rimuovono 2 condizioni di vincolo consentendo sia la
rotazione relativa che la traslazione relativa nella direzione ortogonale al suo
asse. Dal punto di vista statico, nella sezione in cui è presente una cerniera
interna si annulla il momento flettente, in corrispondenza di un doppio pendolo
interno si annulla la componente dell’azione interna nella direzione ortogonale
ai pendoli, mentre in corrispondenza di una biella interna si annulla sia il
momento flettente che la componente dell’azione interna nella direzione
ortogonale al suo asse.
3 cerniere
(non allineate)
1 doppio pendolo
+ 1 biella
1 cerniera
+ 1 biella
g=3×3=9
g=3×2=6
g=3×2=6
m=3+6=9
m=3+3=6
m=3+3=6
Una struttura con n maglie chiuse senza vincoli interni risulta 3n volte
internamente iperstatica, per renderla isostatica occorre rimuovere 3 condizioni
di vincolo per ciascuna maglia, come nei seguenti esempi
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
42
ISOSTATICHE
Esempio n. 1
l
l
l
l
F
G
F
G
H
H
l
D
l
D
E
l
HA
C
A
E
l
VC VC
F
B
B
A
H C HC
VB
VA
F
F
La struttura è isostatica sia internamente che esternamente, inoltre le 3 e.e.g.
forniscono le seguenti reazioni dei vincoli in A e B:
HA = F
VA = F
VB = F
Per trovare le caratteristiche della sollecitazione è necessario aprire la
struttura in corrispondenza di un vincolo interno, ad esempio la cerniera in C,
mettendo in evidenza le reazioni vincolari interne trasmesse attraverso di esso,
indicate con HC e VC. Per ricavare tali reazioni si possono scrivere due e.e.a.
rispetto ai vincoli interni rimasti (cerniere in D ed E), ovvero:
MDAC = HC ℓ + VC ℓ – Fℓ = 0
MEBC = −HC ℓ + VC ℓ = 0
HC = F/2
VC = F/2
da cui
A questo punto è possibile iniziare il calcolo delle caratteristiche della
sollecitazione a partire dalla sezione C essendo note tutte le forze (sia forze
attive che reazioni vincolari) che agiscono sulla struttura, ora aperta.
In alternativa, è possibile svincolare completamente la struttura sostituendo
ai vincoli, sia interni che esterni, le corrispondenti reazioni vincolari. In
particolare, le reazioni vincolari interne trasmesse attraverso i vincoli interni in
C, D ed E agiscono con versi mutui. Le equazioni di equilibrio per ciascuna
delle 3 parti in cui viene suddivisa la struttura forniscono poi i valori di tutte le
reazioni vincolari.
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
TRAVI
43
ISOSTATICHE
F/2
F/2
+
-
F/2 +
− F/2
N
F/2 +
+ F/2
T
+
−
F/2
F/2
Fl/2
Fl/2
M
Fl/2
Fl/2
Esempio n. 2
l
R
l
C = ql2/4
q
D
C
C = ql2/4
E
q
l
A
R
B
A
B
A
HA
E
C
D
R
R
B
ql
VA
3 ql
8
VB
3 ql
8
La struttura è isostatica sia internamente che esternamente, inoltre le e.e.g.
forniscono le seguenti reazioni dei vincoli in A e B:
HA = qℓ
VA = VB =
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13
3
qℓ
8
TRAVI
44
ISOSTATICHE
Per trovare le caratteristiche della sollecitazione è necessario aprire la
struttura, ad esempio in corrispondenza della biella AB, mettendo in evidenza la
reazione vincolare interna R trasmessa attraverso di essa. Per trovare i valori di
tale reazione si può scrivere un’e.e.a. rispetto alla cerniera interna in C, ovvero:
MCEB =
3 2 1
qℓ − qℓ2 – Rℓ = 0
8
4
da cui
R=
1
qℓ
8
A questo punto è possibile iniziare il calcolo delle caratteristiche della
sollecitazione a partire da A o da B essendo note tutte le forze (sia forze attive
che reazioni vincolari) che agiscono sulla struttura, ora aperta.
Di seguito sono riportati i diagrammi delle corrispondenti azioni interne.
1/8
-
1/8
+
−
3/8
1/8
+
+
3/8
-
7/8
3/8
x
3/8
T/ql
N/ql
3/8
1/8
-
1/4
0.383
x
M/ql 2
In alternativa, è possibile svincolare completamente la struttura sostituendo
anche alla cerniera in C le corrispondenti reazioni vincolari interne, in modo da
suddividere la struttura nelle due parti che la compongono. Le 3 equazioni di
equilibrio per ciascuna parte forniscono poi i valori di tutte le reazioni vincolari
sia interne che esterne.
E. Radi - Lezioni di scienza delle costruzioni, a.a. 2012-13