caricato da
common.user9960
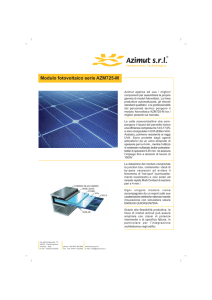
Energia Solare: Pannelli Fotovoltaici e Tecnologie del Silicio

INTRODUZIONE: ENERGIA SOLARE L’ energia solare è la principale fonte di energia rinnovabile esistente sulla Terra. Essa infatti, è fortemente distribuita nella maggior parte del globo, con relative variazioni da luogo a luogo, ed è inoltre quasi costante su base annua. Tuttavia, su base stagionale e giornaliera risulta distribuita in maniera piuttosto disomogenea; inoltre, un altro punto a sfavore è la bassa densità di energia che è possibile ricavare rispetto alle altre fonti energetiche. Il principiale impiego dell’energia solare è certamente la produzione di energia elettrica. Quest’ultima si fonda sui cosiddetti impianti fotovoltaici, che sono in grado di convertire in maniera diretta la luce (visibile e non) in elettricità. Di fatti, questo tipo di impianti non presenta parti meccaniche in movimento, né prevedono la trasformazione del calore in elettricità. Tali caratteristiche rendono gli impianti fotovoltaici molto affidabili, poiché non ci sono parti in movimento che , per via degli attriti, richiedono manutenzione e non richiedono acqua per il raffreddamento, cosa tipica delle altre tipologie di centrali termiche e nucleari adibite alla produzione di energia elettrica. A questo punto, è possibile introdurre i pannelli fotovoltaici. Le diverse tecnologie possono avere rendimenti variabili tra 6 e 22%. Se consideriamo il pannello più a destra, esso, che ha dimensioni minori rispetto agli altri moduli, si presenta come un film sottile (dell’ordine dei micrometri molto spesso) che può essere realizzato con vari materiali tra i quali, silicio amorfo, Cu In Se ( rame inidio selenio), Cu In Ga Se ( rame inidio gallio selenio),Cd Te ( cadmio tellurio) e Cd S. Va ricordato che il cadmio è uno scarto della produzione di zinco. Possiamo così riassumere alcuni dei principali pregi dei moduli (o pannelli) fotovoltaici: • Elevata affidabilità e lunga vita ( >25 anni con EPBT, ovvero energy payback time, < 3 anni): ciò risiede nella capacità di conversione diretta della luce in energia elettrica e dunque, senza passare dall’energia meccanica; • Ridotto costo di manutenzione, circoscrivibile alla sola pulizia del vetro, proprio perché mancano parti meccaniche; • Assenza di rumore ed inquinamento atmosferico; • Produzione di energia vicino al luogo in cui essa deve essere consumata( peculiarità che non appartiene agli altri tipi di centrale); • Lo smaltimento delle celle è privo di scorie e si cerca sempre di riciclarle. Ovviamente non mancano i difetti: • L’energia solare non è stabile, né costante e subisce ampie fluttuazione sia a livello giornaliero sia stagionale; • Gli impianti fotovoltaici necessitano di componenti aggiuntivi quali, convertitori elettronici di potenza, ma anche sistemi di storage necessari per accumulare l’energia nelle fasi di maggior produzione e da poter sfruttare durante i periodi meno redditizi; • Costi di installazione non trascurabili che, sebbene in discesa in questi anni, oscillano tra gli 800€/𝐾𝑊𝑝 ,per gli impianti dell’ordine dei MW, e i 2000 €/𝐾𝑊𝑝 per gli impianti domestici. Processo di fabbricazione delle celle: il silicio di grado solare I pannelli fotovoltaici sono principalmente costituiti da silicio. Quest’ultimo si trova in natura sottoforma di quarzo, che è il secondo minerale più diffuso sul nostro pianeta, ma che non è utilizzabile così com’è in ambito elettronico e fotovoltaico nello specifico. Deve essere sottoposto ad un processo di lavorazione che prevede una prima fase di produzione dove viene ottenuto il silicio metallurgico (MG-Si) ; andando più nel dettaglio, il quarzo viene scaldato in grosse fornaci e a temperature elevate (T= 1800-2000°C) in combinazione con il carbonio (sottoforma di grafite) ed il tutto avviene secondo la reazione: SiO2 + 2C → Si + 2CO. Il risultato di tale processo, come detto, è la formazione del silicio metallurgico che ha un grado di purezza del 98-99 % , viene inoltre consumata molta energia elettrica (≈ 50 𝑘𝑊ℎ/𝑘𝑔) e si ha anche un prodotto di scarto che è il monossido di carbonio, da cui viene prodotta anidride carbonica con delle emissioni che tuttavia, risultano modeste <0,3 g/kWh. Si stima che all’ incirca in un anno vengano prodotte più di 7 milioni di tonnellate di silicio metallurgico, che viene soprattutto impiegato nell’industria dell’acciaio e dell’alluminio (2-3 $/kg). A questo punto, per ottenere un silicio ancora più puro, si passa alla seconda fase in cui il silicio metallurgico viene ridotto in polvere e fatto reagire con acido cloridrico in fase gassosa in un reattore a fluido (“fluidized bed”) secondo una reazione esotermica, che sviluppa triclorosilano ( SiHCl3) e idrogeno. Il triclorosilano si presenta allo stato liquido per temperature inferiori a 31°C, per cui è possibile liberarlo facilmente dalle impurità attraverso un processo di distillazione frazionata e ciò permette anche di separarlo dall’idrogeno. Successivamente, il triclorosilano può essere ridotto a silicio ed in particolare, è possibile produrre silicio policristallino ( “polysilicon”) di elevatissima purezza mediante un processo di deposizione chimica di vapore (Chemical Vapour Deposition, CVD) nel reattore Siemens ( T= 1100-1300° C con ingente consumo di elettricità ~200 𝑘𝑊ℎ/𝑘𝑔). In quest’ultimo, una barra di silicio puro, a forma di U, si accresce man mano che viene liberato dal triclorosilano; al temine di tale processo, che dura circa dieci giorni per la produzione di una singola tonnellata, si estrae il silicio sottoforma di frammenti irregolari, rompendo la barra. Tuttavia, è possibile anche un’ altra strada e che porta alla fabbricazione di silicio granulare; essa prevede che , al posto della fase di deposizione chimica di vapore, venga effettuta una reazione a temperatura più bassa (800°C), secondo un processo continuo in un reattore a letto fluido. In esso si introducono Si in particelle e una corrente gassosa di SiHCl3 e H; il Si puro si deposita sulla superficie delle particelle, formando dei granuli. Le tecnologie del silicio policristallino (p-Si) Le celle fotovoltaiche in silicio policristallino hanno un’efficienza del 12-21% e si realizzano riciclando componenti elettronici di scarto, da cui si ottiene una composizione cristallina compatta. Tale processo prevede che il silicio , fuso con energia elettrica, venga versato in un crogiolo di grafite ; successivamente, si effettua un raffreddamento controllato con cristallizzazione direzionale (directional solidification). I cristalli di silicio all’interno del crogiolo solidificano con velocità di cristallizzazione par a circa 3,5 kg/h e consumo energetico di 10-15 kWh/kg→ si ottengono 244 kg di silicio. In seguito, con un taglio, si ricavano lingotti a di parallelepipedo, con base quadrata di lato 15,6 cm; il materiale ha già di base un drogaggio tipo p e al lingotto vengono asportate testa e coda, laddove si concentrano la maggior parte dei difetti e delle impurità del materiale. Quindi, i lingotti sono tagliati con un taglio orizzontale e si ottengono delle fette che prendono il nome di wafer e che hanno uno spessore di 0,2-0,3 mm; tuttavia, in questa operazione, buona parte del materiale (30-50%) viene rimosso come sfrido (riciclato nella fusione). In questa fase il wafer è semplicemente drogato p, per cui, è necessario creare la giunzione p-n; ciò avviene mediante una diffusione gassosa con composti a base di fosforo e che prevede il passaggio del wafer all’interno di un forno a 800-1200°C→ sulla faccia opposta si ottiene il drogaggio di tipo N; la giunzione p-n viene quindi ripulita e levigata attraverso attacchi chimici (etching). Dopo aver depositato un sottile strato antiriflesso di nitruro di silicio o di ossido di titano al fine di ridurre al minimo le perdite per riflessione, si realizzano gli elettrodi: sulla faccia anteriore esposta alla luce si depone un elettrodo a griglia con una serigrafia ( screen printing con lega di Al-Ag), in modo da ottenere un ottimo contatto con lo strato N, mentre sulla faccia posteriore si depone un elettrodo a placca in lega metallica, di solito alluminio. È possibile di mostrare che con 1 kg di silicio trasformato in moduli FV, si producono oltre 200kWh di energia elettrica. Nella figura a fianco è rappresentata la sequenza tradizionale che dal silicio grado solare porta alla cella. Sulla destra è invece presente la tecnologia “string ribbon” per avere direttamente il wafer senza il taglio del lingotto. A fianco a sinistra, si ha invece la tecnologia Edge Defined Film Growth (EFG) che consiste nell’estrarre e raffreddare una sottile fessura ottagonale, il silicio fuso (simile ad una trafilatura): si ottiene un cilindro cavo, dal quale si estraggono 8 file di celle con taglio laser. Le tecnologie del silicio monocristallino m-Si In questa tecnologia, che è la prima sviluppata nella storia del FV, si possono distinguere due tecnologie innovative, oltre a quella convenzionale: ➢ Quella con l’etero-giunzione di Si monocristallino / Si amorfo (moduli con rendimento del 19/21%); ➢ Quella con entrambi i contatti collocati nella faccia inferiore della cella “all back surface contacts” (moduli con rendimento del 20-22%). Le tecnologie dei film sottili Esse sono conosciute come la seconda generazione degli impianti fotovoltaici. La loro caratteristica principale è la possibilità, rispetto alle altre tecnologie del fotovoltaico, di abbattere i costi grazie ad un uso contenuto dei materiali di produzione. Infatti i film sottili (thin film) richiedono l’uso di materiale dallo spessore dell’ordine di qualche µm. Le tecniche di produzione di questa tipologia di celle sono molto meno complesse rispetto alle altre e permettono una stampa diretta delle celle su supporti rigidi o flessibili. Innanzitutto, le temperature di lavorazione sono minori e si aggirano tra i 300-500°C; le celle vengono connesse tra loro contemporaneamente alla loro fabbricazione ( connessione integrata o monolitica tra i vetri che incapsulano il modulo); inoltre, queste celle “soffrono” meno il caldo dei mesi estivi, tanto da presentare dei coefficienti termici di perdita più bassi rispetto alle altre tecnologie (-0,2-0,3 %/°C); tuttavia, esse presentano delle correnti ridotte (1-3A) ed anche dei rendimenti più bassi (6-15%), sebbene siano in grado di avere un’ottima resa in condizioni di nuvolosità, migliore delle altre tecnologie. Ci sono 2 categorie principali di celle a film sottile, ossia quelle riportate a fianco. Celle multigiunzione e concentrazione Questa tecnologia è in forte diffusione negli ultimi anni. In essa, a differenza delle altre tecnologie fotovoltaiche, non viene usato il silicio, ma si preferiscono composti formasti da semiconduttori del III e IV gruppo sulla tavola periodica, ovvero In- Ga-P-As-Ge. La loro struttura prevede in genere 2 o 3 celle di sezione pari circa ad 1 cm2 e con l’interfaccia delle celle realizzata mediante diodi tunnel. Questa tipologia di celle ha un’efficienza maggiore che può arrivare anche al 45% in laboratorio e 30 % in ambito commerciale e ciò è possibile grazie al fatto che i composti semiconduttori ottenuti dagli elementi sopracitati godono, rispetto al silicio, di una maggiore velocità di saturazione degli elettroni, nonché di una maggiore mobilità di questi ultimi, e soffrono di un minor rumore termico. Tuttavia, questa tecnologia ha come principale svantaggio la complessità nel processo di realizzazione delle celle che fa lievitare sensibilmente i costi rispetto alle tecnologie che si basano su silicio mono o policristallino. Tecnologie degli inverter Gli inverter sono dispositivi elettronici di potenza che si occupano della conversione da corrente continua a corrente alternata e, per tale ragione, risultano fondamentali poiché le celle fotovoltaiche producono energia elettrica in corrente continua, ma le reti ordinarie funzionano in corrente alternata. Inoltre svolgono anche la funzione di regolazione della tensione e della frequenza per renderli compatibili agli utilizzatori incorporando al loro interno un trasformatore. Ci sono sostanzialmente due tipologie di inverte: l’inverter per impianti stand-alone, il quale non è interfacciato alla rete elettrica e può essere alimentato sia in corrente continua (dalle batterie) che in corrente alternata e l’inverter collegato alla rete, avente una tensione sinusoidale in uscita sincronizzata con quella della rete. Essi rispetto ai moduli possono avere diverse configurazioni che vanno a definire l’unità di condizionamento della potenza PCU: - Configurazione centralizzata con inverter trifase o monofase (a destra); - String inverter, che è un inverter collegato ad una serie di moduli fotovoltaici, interpretabile come un stringa e detta PV string (a sinistra); - Moduli in AC: in questo caso l’inverter è integrato nel modulo e questa ovviamente, è una soluzione abbastanza estrema ( a destra); - master-slave: in questo caso, abbiamo un componente sempre a lavoro( il master), mentre lo/gli slave si accende solo in determinate occasioni( a sinistra). Questa soluzione è quella che dà maggiore efficienza DC-AC a basso carico, ossia a cielo coperto. In generale devono avere alcune fondamentali funzionalità per connettersi alla rete: devono essere dotati un sistema di rilevamento del punto di massima potenza della caratteristica I-V, che può variare a seconda della luminosità e della temperatura, garantendo un trasferimento di potenza ottimale; devono permettere la regolazione di potenza attiva e reattiva ed infine, devono possedere un sistema di protezione all’interfaccia con la rete che rilevi la presenza di quest’ultima e che consenta agli inverter di essere scollegati se essa non è presente. NB: l’accoppiamento dell’inverte con la rete avviene con o senza trasformatore, con trasformatore in bassa o in alta frequenza e con trasformatore trifase o monofase. Richiami sui semiconduttori Come abbiamo accennato in precedenza la cella fotovoltaica (FV) è l’elemento base dei sistemi FV, perché in essa avviene la conversione diretta della radiazione solare in energia elettrica. La conversione avviene sfruttando le proprietà dei semiconduttori. Quest’ ultimi sono una particolare categoria di elementi che all’interno della tavola periodica occupano una posizione intermedia tra conduttori ed isolanti ed inoltre, essi a basse temperature non hanno elettroni liberi che permettano la conduzione, mentre a temperatura ambiente sono caratterizzati da una debole conduttività. Il principale semiconduttore, anche grazie alla sua ampia diffusione, è il silicio appartenente al IV gruppo della tavola periodica. In esso il cristallo è tetravalente ossia ciascun atomo dispone di 4 elettroni di valenza , disponibili per il legame chimico con gli atomi circostanti. A questo punto, è necessario richiamare alcune nozioni fondamentali quali la struttura a bande di energia dell’ atomo e la generazione di coppie elettrone-lacune; la banda di energia non è altro che l’insieme dei livelli energetici posseduti dagli elettroni ed è composta da : • banda di valenza: essa è costituita dagli elettroni coinvolti nel legame chimico ; • banda di conduzione: costituita dagli elettroni aventi un livello energetico superiore al precedente , tale da permettere la loro circolazione nel reticolo cristallino. Quando un elettrone si trova in banda di conduzione vuol dire che esso non è più vincolato al suo atomo; • banda proibita ( Energy gap): rappresenta il salto energetico necessario all’elettrone per passare dalla banda di valenza a quella di conduzione. Quest’ultimo parametro è fondamentale per la distinzione tra materiali isolanti, semiconduttori e conduttori. Esso nella fattispecie, è tanto più piccolo quanto migliori sono le proprietà da conduttore del materiale preso in considerazione. A fianco, sono riportati i valori di energy gap per i materiali semiconduttori di maggiore interesse. Va detto che l’energy gap è fortemente legato alla temperatura, infatti se la temperatura diminuisce → l’energy gap aumenta. In un semiconduttore per ottenere il funzionamento da diodo (interruttore unidirezionale in corrente), bisogna realizzare la giunzione p-n ponendo a contatto 2 cristalli : uno è “drogato” con atomi trivalenti (ad esempio, il boro), mentre l’altro con atomi pentavalenti ( fosforo). Il boro appartiene al III gruppo degli elementi nella tavola periodica, ha infatti 3 atomi nel livello di energia più elevata, per cui, quando si lega al silicio si ha una mancanza (lacuna /hole) di un elettrone→ lo spostamento di una lacuna è assimilabile allo spostamento di una carica positiva. Il fosforo invece, appartiene al V gruppo della tavola periodica e nel livello di energia esterna ha 5 elettroni→ ciò vuol dire che ce n’è uno in più e rappresenta la carica (negativa) che può spostarsi , poiché non coinvolta in nessun legame. Il cristallo di tipo P contiene gli atomi trivalenti e presenta nel reticolo delle lacune, mentre il cristallo di tipo N presenta elettroni liberi dal legame. NB: finchè lacuna ed elettrone sono in prossimità del loro atomo, ne è garantita la neutralità; tuttavia ciò non è più vero qualora lacuna ed elettrone migrino nell’altro strato. Infatti con l’ agitazione termica (T>0 K) lacune ed elettroni sono liberi di muoversi nel reticolo per diffusione. In una cella a singola giunzione lo strato drogato N è posto sopra lo strato P in uno spessore variabile tra 200 e 300 . Una cella non esposta alla luce si comporta da raddrizzatore→ grazie all’agitazione termica, gli elettroni dello strato N si spostano verso lo strato P, mentre le lacune dal cristallo P si spostano verso N. Tale spostamento provoca uno squilibrio di carica, con il fosforo( tipo N) che, perdendo un elettrone, risulterà carico positivamente, mentre il boro (tipo P), perdendo una lacuna, risulterà carico negativamente. Questo spostamente genera ovviamente una corrente di diffusione cche indichiamo con I0 e il processo di diffusione si arresta solo quando il campo elettrico riesce a generare una corrente - I0 in grado di controbilanciare il moto di diffusione. Consideriamo a questo punto, i casi in cui la giunzione venga polarizzata: ➢ Polarizzazione diretta: viene applicata una differenza di potenziale con il segno “+” in corrispondenza del lato P, così da abbassare il campo di giunzione→ questa polarizzazione riduce la barriera di potenziale e perciò, la corrente di diffusione nel diodo cresce notevolmente; ➢ Polarizzazione inversa: in questo caso, viene applicata una polarizzazione positiva sul lato N→ il campo di giunzione aumenta , incrementa la barriera di potenziale , tuttavia la corrente non è nulla, ma scorre una debole corrente di saturazione inversa orientata dal campo di giunzione. NB: questa tipologia di funzionamento, appena descritta, è tipica del diodo ed infatti in questo caso la giunzione si comporta come tale. Effetto fotovoltaico Esso non è altro che un caso particolare dell’effetto fotoelettrico descritto da Albert Einstein agli inizi del secolo scorso. Nello specifico, le teorie dello scienziato tedesco affermano che la luce possiede un’energia quantizzata; i quanti di energia sono stati definiti fotoni e quando colpiscono una superficie metallica essi sono in grado di cedere la loro energia agli elettroni presenti in superficie. I fotoni trasportano energia ma non materia ed essi riuniscono la teoria corpuscolare e quella ondulatoria della meccanica quantistica. Quando i fotoni colpiscono il materiale, ad esempio la cella solare, se l’energia che essi possiedono è superiore all’energy gap caratteristico del materiale, si può dare inizio al salto di banda degli elettroni che passano dalla banda di valenza a quella di conduzione; si ha per cui, un elettrone libero in banda di conduzione ed una lacuna libera in banda di valenza→ si crea una coppia elettrone-lacuna che dà luogo ad una corrente utilizzabile in uscita dal pannello. L’energia posseduta dalla radiazione solare è calcolabile come 𝐸𝑝ℎ = ℎ 𝜈, dove h è la costante di Planck, mentre 𝜈 è la radiazione della frequenza della radiazione. Tale energia deve essere maggiore dell’energy gap in modo tale che si verifichi quanto scritto su. in presenza del campo elettrico di giunzione, gli elettroni sono attirati verso la zona N (carica positivamente) e le lacune verso la zona P (carica negativamente) , tant’è che il campo di giunzione non fa altro che indirizzare le cariche nel verso giusto. Il moto delle cariche è all’origine della corrente fotovoltaica che è del tutto analoga alla corrente del campo elettrico di giunzione, −𝐼0 . Come già affermato in precedenza, non tutta la radiazione dello spettro solare può generare coppie elettrone/lacune ma solo i fotoni con energia sufficiente. I fotoni (nel visibile e ancor più nell’ultravioletto ) hanno un surplus di energia (che viene dissipato sottoforma di calore) che va perso nella creazione della coppia elettrone lacuna: ciò implica un limite di efficienza nella conversione. Il limite inferiore corrisponde proprio all’energy gap (1,1 eV) ed in corrispondenza di quel limite si ha una 𝜆 dell’ordine dei 110 nm. A sinistra di questo limite, la lunghezza d’onda aumenta e siamo nell’infrarosso; a destra del limite superiore siamo nell’ultravioletto. NB: come si evince da questa analisi, energia fotonica e lunghezza d’onda sono inversamente proporzionali. Oltre a questo, si hanno ulteriori penalizzazioni nella conversione: • Non tutti i fotoni incidenti sulla cella penetrano all’interno, alcuni vengono riflessi e altri vengono intercettati dall’elettrodo frontale (tranne nelle celle a contatti posteriori BSC); • Alcune coppie elettrone/lacune si ricombinano nonostante la presenza del campo elettrico interno della giunzione; • Nascono correnti di dispersione lungo le 4 superfici laterali della cella; • L’elettrodo frontale della cella presenta una certa resistenza, che si riduce con l’aumento del numero dei bus- bar → si hanno perdite per effetto joule (RI2). Si definisce risposta spettrale ideale Sid della cella FV come il rapporto tra la carica dell’elettrone e l’energia del fotone. Il silicio monocristallino ha la risposta migliore in quanto ha l’efficienza quantica che più si avvicina a quella teorica. Calcolo la densità di corrente foto-generata 𝐽𝑝ℎ = 𝛿𝐼 = 𝜆 ∫𝜆 𝑚𝑎𝑥 𝑔(𝜆)𝑆𝑅(𝜆)𝑑𝜆, dove 𝑔(𝜆) è lo 𝑚𝑖𝑛 spettro solare mentre 𝑆𝑅(𝜆) è la risposta spettrale della cella FV. Possiamo poi definire 𝐺 = ∫ 𝑔(𝜆)𝑑𝜆 che viene definita irradianza che è la potenza proveniente da una sorgente radiante per unità di superficie, tant’è vero che la sua unità di 2 misura è [𝑊 ⁄𝑚 ]. Per tale ragione, se nel primo integrale SR= costante→ 𝐽𝑝ℎ = 𝐾𝑚𝑎𝑡 𝐺, 𝐾𝑚𝑎𝑡 rappresenta la risposta spettrale media. Nello specifico, possiamo notale che la densità di corrente fotogenerata nel caso monocristallino ha un valore triplo rispetto al caso del silicio amorfo. Si possono avere diverse giunzioni in bae al valore al valore dell’energy gap dei due strati. si può avere un omogiunzione, come quella nella figura a sinistra in cui entrambi gli strati hanno il medesimo energy gap. Nel caso dell’etero giunzione i 2 strati hanno diverso energy gap poiché possono ad esempio essere costituiti da silicio amorfo per uno strato e monocristallino per l’altro. Si può avere infine anche la cosiddetta giunzione P-I-N, in cui si ha uno strato intermedio interno che è realizzato con semiconduttori intrinseci (non drogati). NB: è importante evidenziare che nei vari tipi di giunzione si hanno andamenti del campo diversi all’interno della giunzione stessa. Struttura della cella fotovoltaica La maggior parte delle celle FV più diffuse sono in silicio mono o policristallino, che rappresenta una fetta consistente nel mercato del fotovoltaico (più del 90%). Ogni cella è realizzata a partire da un wafer dello spessore di 200 ÷350 µm e di 10÷20 cm di lato. Sulla parte frontale è applicato un materiale antiriflettente ed inoltre, essa spesso può essere “testurizzata”, ossia la cella non è liscia ma rugosa. NB: come si può apprezzare dalla figura, l’elettrone va dallo strato p a quello n mentre le lacune vanno da n a p. Per quanto riguarda la fabbricazione vera e propria delle celle, le monocristalline sono ricavate da un unico cristallo di sezione circolare; le policristalline derivano da fusione e solidificazione di silicio in un crogiolo di quarzo di forma parallelepipeda. Sulla parte posteriore (di solito tipo p) è applicato un contatto esteso quanto la superficie della cella. Sulla parte anteriore (di solito tipo n) il contatto è formato da sottili deposizioni di argento (finger e busbar). Curva corrente-tensione I-U: effetto dell’irradianza e della temperatura Ai morsetti esterni il comportamento elettrico della cella solare è descritto in prima approssimazione da un generatore di corrente ideale 𝐼𝑝ℎ proporzionale all’irradianza (𝐼𝑝ℎ ∝ 𝑮 , 𝐼𝑝ℎ = 𝐺𝐾𝑚𝑎𝑡 𝐴) e da un diodo in antiparallelo. Di conseguenza la caratteristica corrente tensione di un diodo non è altro che la caratteristica del diodo traslata verticalmente di una corrente pari a 𝐼𝑝ℎ . Quest’ultima è la corrente responsabile della polarizzazione diretta della giunzione, a cui si sottrae la corrente di diffusione (da p ad n in figura), che cresce all’aumentare della tensione (diventano rilevante dopo un valore di soglia della tensione, che per il silicio monocristallino è il doppio rispetto al policristallino) fino al valore di equilibrio 𝑈𝑂𝐶 . Quest’ ultima è la tensione che si avrebbe ai morsetto della cella, se il carico fosse un circuito aperto e viene detta tensione a circuito aperto. Altro parametro importante è 𝐼𝑆𝐶 è la stessa corrente che circolerebbe nella cella se essa fosse chiusa su un cortocircuito e viene detta corrente di cortocircuito. Quello in figura è l’unica porzione di grafico in cui la cella ha un funzionamento attivo, cioè da generatore. Tuttavia in altri 2 quadranti dei 3 restanti, è possibile un comportamento da utilizzatore. Scegliendo un carico opportuno, sarà possibile far lavorare la cella in condizioni di massima potenza 𝑃𝑀 = 𝑈𝑝𝑚 𝐼𝑝𝑚 , dove 𝑈𝑝𝑚 𝑒 𝐼𝑝𝑚 sono rispettivamente la tensione e la corrente nel punto di massima potenza. Nel punto di massima potenza 𝑑𝐼 𝐼 abbiamo che 𝑑𝑃 = 𝐼𝑑𝑈 + 𝑈 𝑑𝐼 = 0 → − 𝑑𝑈 = 𝑈, dove il termine a destra dell’uguale è la conduttanza del carico mentre quello a sinistra è la conduttanza incrementale del generatore FV. È possibile realizzare un circuito equivalente più aderente alla realtà rispetto al circuito presentato su. In questa soluzione sono infatti presenti anche degli elementi dissipativi, ossia una resistenza in parallelo 𝑅𝑠ℎ ed una in serie 𝑅𝑠 . La resistenza 𝑅𝑠ℎ corrisponde alla corrente di dispersione superficiale tra piastra e griglia, sulle superfici laterali della cella solare. Queste superfici, durante la fabbricazione della cella, sono rese, il più possibile, isolanti. La resistenza 𝑅𝑠 è la somma della resistenza volumica del semiconduttore, delle resistenze di contatto e di quelle proprie degli elettrodi. In pratica, la quota prevalente in 𝑅𝑠 è data dalla resistenza dell’elettrodo frontale a forma di griglia. Tale griglia è costituita da “busbar” (2 o 3 nelle celle attuali) e da “finger” che sono ortogonali alle busbar. Esse servono per le connessioni tra le celle mediante saldatura. I fingers captano i contributi di corrente fotovoltaica, prodotti su tutta la superficie della cella, esposta alla luce. Se U è la tensione ai morsetti del carico ed I è la corrente da esso assorbita, le seguenti equazioni rappresentano il bilancio di correnti al nodo ed il bilancio di tensioni sulla maglia del circuito→ 𝐼 = 𝐼𝑝ℎ − 𝐼𝑗 − 𝑈𝑗 ⁄𝑅𝑠ℎ e 𝑈 = 𝑈𝑗 − 𝑅𝑠 𝐼. Ricordiamo che 𝐼𝑝ℎ = 𝐺𝐾𝑚𝑎𝑡 𝐴, mentre la corrente nella giunzione segue il seguente andamento, se non teniamo conto del breakdown distruttivo → 𝐼𝑗 = 𝐼0 (𝑒 𝑞𝑈𝑗 ⁄𝑚𝑘𝑇 − 1) = 𝐼0 𝑒 𝑞𝑈𝑗 ⁄𝑚𝑘𝑇 − 𝐼0 , dove 𝐼0 𝑒 𝑞𝑈𝑗 ⁄𝑚𝑘𝑇 è la corrente diffusiva e 𝐼0 è la corrente di campo. Inoltre, T rappresenta la temperatura assoluta, q la carica dell’elettrone, m il fattore di qualità della giunzione e K è la costante di Boltzmann. NB: i parametri indipendenti dalle dimensioni della cella sono la densità di corrente J, la tensione U e la densità di potenza 𝑝𝑢 che è proporzionale all’efficienza di conversione 𝜂𝑐 . Come detto in precedenza, la potenza erogogata da una cella FV presenta un massimo, invece, in corrispodenza dei punti 𝐼𝑆𝐶 e 𝑈𝑂𝐶 la potenza erogata risulta nulla. Possiamo definire il cosiddetto fill factor (o fattore di riempimento) FF che non è altro che il rapporto tra il rettangolo di massima potenza ed il prodotto tra la corrente di cortocircuito e la tensione a circuito aperto della cella ed inoltre costituisce un parametro utile per confrontare le prestazioni delle celle: 𝐹𝐹 = 𝑈𝑃𝑚𝑎𝑥 𝐼𝑃𝑚𝑎𝑥 𝑈𝑂𝐶 𝐼𝑆𝐶 𝑃 = 𝑈 𝑚𝑎𝑥 . Esso tipicamente per 𝐼 𝑂𝐶 𝑆𝐶 il silicio cristallino vale 0,7-0,8 mentre per il silicio amorfo scende a 0,5-0,6. DIPENDENZA DALL’IRRADIANZA La caratteristica corrente tensione, se la temperatura è costante, si modifica al variare dell’irradianza G: al suo diminuire, la corrente di corto circuito 𝐼𝑆𝐶 diminuisce proporzionalmente, mentre la tensione a circuito aperto 𝑈𝑂𝐶 diminuisce con legge logaritmica. I medesimi andamenti si presentano per la 𝐼𝑃𝑚𝑎𝑥 e la 𝑈𝑃𝑚𝑎𝑥 rispettivamente. 𝑈𝑂𝐶 ≈ 𝐼𝑝ℎ 𝑚𝑘𝑇 𝑙𝑛 ( )→ 𝑞 𝐼0 la tensione a circuito aperto è abbastanza costante anche per notevoli variazioni dell’irradianza; solo per 2 valori di irradianza minori di 50 𝑊 ⁄𝑚 il valore di 𝑈𝑂𝐶 cala bruscamente. Bisogna infine sottolineare che le variazioni della caratteristica corrente-tensione delle celle al variare dell’irradianza, avvengono in tempi molto brevi, dell’ordine dei 10-20 µs. DIPENDENZA DALLA TEMPERATURA La caratteristica corrente-tensione dipende anche dalla temperatura; quest’ultima ha una grande influenza sulle prestazioni delle celle fotovoltaiche, tant’è vero che con l’aumento della temperatura vanno a peggiorare poiché la cella teoricamente andrebbe raffreddata, ma ci si accontenta della sola areazione naturale. In particolare, al crescere della temperatura T (irradianza costante), la 𝐼𝑆𝐶 aumenta, mentre la 𝐼𝑝𝑚 diminuisce (poco nel c-Si, di più nell’a-Si). Inoltre si può scrivere che la variazione di densità di corrente di cortocircuito è 𝑑𝐽𝑆𝐶 ⁄𝑑𝑇 = +10𝜇𝐴/(𝑐𝑚2 °𝐶). Per quanto riguarda la tensione, un aumento della temperatura fa sì che 𝑈𝑂𝐶 e 𝑈𝑝𝑚 diminuiscano sensibilmente per l’aumento di 𝐼0 . La variazione di tensione a circuito aperto può essere scritta come 𝑑𝑈𝑂𝐶 ⁄𝑑𝑇 = −2,2𝑚𝑉/°𝐶, mentre i coefficienti termici relativi della tensione di cortocircuito e della tensione a massima potenza 2,2 2,2 (𝑑𝑈𝑚𝑝𝑝 ⁄𝑑𝑇 ≈ 𝑑𝑈𝑂𝐶 ⁄𝑑𝑇) sono: 𝛽𝑈𝑂𝐶 = − 600 ∗ 100 ≈ −0,37%/°𝐶 e 𝛽𝑈𝑝𝑚𝑎𝑥 = − 500 ∗ 100 ≈ −0,45%/°𝐶 . Si può a questo punto dimostrare che il coefficiente relativo 𝛾𝑃𝑚𝑎𝑥 % della potenza massima è prossimo al coefficiente termico relativo 𝛽𝑈𝑝𝑚𝑎𝑥 % della tensione a massima potenza, infatti il coefficiente termico 𝛼𝐼𝑝𝑚𝑎𝑥 % relativo della corrente è trascurabile: 𝑑𝑃𝑚𝑎𝑥 𝑑𝑇 𝑑𝑃𝑚𝑎𝑥 1 𝑑𝑇 𝑃𝑚𝑎𝑥 ∗ 100 = 𝛼𝐼𝑝𝑚𝑎𝑥 % + 𝛽𝑈𝑝𝑚𝑎𝑥 % ≈ 𝛽𝑈𝑝𝑚𝑎𝑥 % . ∗ 100 = 𝑑𝐼𝑃𝑚𝑎𝑥 1 𝑑𝑇 𝐼𝑃𝑚𝑎𝑥 ∗ 100 + 𝑑𝑈𝑃𝑚𝑎𝑥 1 𝑑𝑇 𝑑𝑈𝑃𝑚𝑎𝑥 = 𝑈𝑃𝑚𝑎𝑥 𝑑𝐼𝑃𝑚𝑎𝑥 𝑑𝑇 + 𝐼𝑃𝑚𝑎𝑥 𝑑𝑈𝑃𝑚𝑎𝑥 𝑑𝑇 ; 𝛾𝑃𝑚𝑎𝑥 % = Si scrivono formule semplici per la dipendenza dei principali parametri da irradianza e temperatura (𝑈𝑃𝑚 →𝑈𝑂𝐶 e 𝐼𝑃𝑚 →𝐼𝑆𝐶 ): 𝐼𝑆𝐶 (𝐺, 𝑇𝐶 ) = 𝐼𝑆𝐶 (𝑆𝑇𝐶) 𝛽𝑈𝑜𝑐 ∆𝑇𝑐 ) , 𝑃𝑀 (𝐺, 𝑇𝐶 ) = 𝑃𝑀 (𝑆𝑇𝐶) 𝐺(𝑊/𝑚2 ) 1000 𝐺(𝑊/𝑚2 ) 1000 (1 + 𝛼𝐼𝑠𝑐 ∆𝑇𝑐 ) , 𝑈𝑂𝐶 (𝑇𝐶 ) = 𝑈𝑂𝐶 (𝑆𝑇𝐶)(1 + (1 + 𝛾𝑃𝑚 ∆𝑇𝑐 ), dove ∆𝑇𝑐 = 𝑇𝑐 − 25°𝐶 e 25°C è la temperatura nelle condizioni cosiddette standard. Il rendimento di conversione ci è dato dal rapporto della potenza 𝑃 elettrica prodotta e la potenza irradiata: 𝜂(𝑇𝑐 ) = 𝐺𝑀𝐴 = 𝑃𝑀 (𝑆𝑇𝐶)(1+𝛾𝑃𝑚 ∆𝑇𝑐 ) 1000 𝐴 Nella realtà si ha una variazione simultanea dell’irradianza e della temperatura (interdipendenza) : la temperatura della cella 𝑇𝑐 , così come 𝑃𝑑𝑐 ,dipende dalla temperatura ambiente e dall’irradianza→ 𝑇𝑐 = 𝑇𝑎𝑚𝑏 + 𝐾𝐺, dove k è un fattore di proporzionalità. Il grafico a fianco si riferisce alla stagione estive e possiamo notare infatti che il punto di massima irradianza si ha tra le 13:00 e le 13:30 proprio per via dell’ora legale, altrimenti coinciderebbe con mezzogiorno. L’andamento della corrente ( e della potenza) è simile a quello dell’irradianza, invece l’ andamento della tensione presenta un “avvallamento” in corrispondenza delle ore centrali della giornata, proprio perché la temperatura va ad influire negativamente sulla tensione. NB: nella realtà vengono fatte alcune approssimazioni; in primo luogo, la corrente si considera dipendente solo dall’irradianza, mentre la tensione a circuito aperto si considera dipendente solo dalla temperatura. Le entità di queste variazioni sono tali da provocare una diminuzione globale della potenza massima generabili (𝑑𝑃𝑀 /𝑑𝑇/𝑃𝑀 = 0,5 %/°𝐶 per il silicio cristallino). Collegamento di celle solari in serie ed in parallelo Una singola cella di silicio cristallino, con irradianza e carico ottimali, genera la tensione di 0,6-0,7 V (quasi indipendente dalla superficie) ed eroga una corrente (proporzionale alla superficie ) con densità di corrente 𝐽𝑆𝐶 = 25 − 40 𝑚𝐴/𝑐𝑚2 (𝐼𝑆𝐶 = 4 − 5,5 𝐴 per celle con lato di 12,5 cm, 𝐼𝑆𝐶 = 6 − 8,5 𝐴 con lato di 15,6 cm). La potenza di una singola cella varia tra 5 e 6 W , tuttavia i carichi richiedono delle potenze maggiori( correnti e tensioni maggiori) rispetto a quelle fornite dalle singole celle e per tale ragione, è indispensabili collegare più celle solari in serie o parallelo. Generalmente si predilige il collegamento in serie, in quanto è più importante salire a tensioni superiori ad 1 V MISMATCH NEI COLLEGAMENTI (SERIE) Collegando più celle in serie è possibile aumentare il valore di tensione, mantenendo costante il valore di corrente, così da avere un incremento della potenza complessiva prodotta. Qualora le celle non presentassero gli stessi parametri elettrici a causa di un difetto costruttivo od a causa di ombreggiamento di una di esse, si verificherebbe la cosiddetta condizione mismatch (disomogeneità, diseguaglianza). Se ad esempio abbiamo Ns celle connesse in serie, la tensione totale sarà la somma della tensione delle Ns – 1 perfettamente funzionanti più la tensione ridotta della cella scadente. Nel grafico in figura la curva a rappresenta la caratteristica corrente-tensione di una cella affetta da mismatch di tipo costruttivo, la curva a’ si riferisce invece ad una situazione di pesante ombreggiatura della cella. La curva (c) è la curva I-U corrispondente alle Ns – 1 celle perfettamente funzionanti connesse in serie con la cella che causa mismatch corrispondente alla curva (a). Allo stesso modo, la curva (c’) corrisponde alle celle Ns – 1 perfettamente funzionanti connesse in serie con la cella che causa mismatch per ombreggiamento corrispondente alla curva (a’). La curva tratteggiata (b) è invece la caratteristica I-U ottenuta collegando in serie solo le Ns – 1 celle perfettamente funzionanti. La curva corrente- tensione risultante ha una tensione di circuito aperto UOC che è pari alla somma delle singole tensioni di cortocircuito→ 𝑈𝑂𝐶 = ∑𝑛𝑖=1 𝑈𝑂𝐶,𝑖 ; la corrente di cortocircuito erogata è invece pari alla corrente di cortocircuito della cella affetta da mismatch, che dunque va ad inficiare le prestazioni dell’intera seria→ 𝐼𝑆𝐶 ≈ (𝐼𝑆𝐶 )𝑚𝑖𝑛 . Quest’ultima condizione è importante da tenere in considerazione in quanto, se facciamo crescere la corrente non si hanno problemi finchè non si raggiunge il punto di cortocircuito della cella affetta da mismatch; quest’ultima è nella situazione in cui più di quel valore di corrente non lascia passare, per cui se aumenta la corrente, la fa circolare ma con una spesa, ovvero l’inversione della tensione; in condizioni di mismatch, l’elemento debole diventa un carico (dà contributo negativo). Di conseguenza, crolla rapidamente la somma delle tensioni Ns a causa del fatto che la tensione sulla cella è fortemente negativa, infatti su di essa agisce la sommatoria delle tensioni delle celle non oscurate, (Ns – 1 )U . Questa condizione si può visualizzare ribaltando la curva caratteristica b delle celle perfettamente funzionanti, laddove il punto P’ identifica la sommatoria delle tensioni non oscurate(o danneggiate). La cella affetta da mismatch è costretta a dissipare una potenza maggiore di quella che potrebbe dissipare, con formazione di cosiddetti “hot spots” che possono danneggiarla irrimediabilmente. Se la tensione (Ns – 1 )U supera la tensione di rottura 𝑈𝑏 , compresa generalmente tra -20 e -30 V, si ha la distruzione immediata della cella. Per ovviare a questo problema, viene inserito un diodo di bypass Dp in antiparallelo alla cella in ombra, in modo tale da evitare che essa funzioni da utilizzatore con tensione eccessivamente negativa. Così facendo, non viene compromessa la potenza complessiva fornita dall’ intera stringa. Tuttavia, l’intervento del diodo di bypass comporta una caduta di tensione di 0.6 V e dunque sarebbe improponibile disporre un diodo per ogni cella connessa in serie poiché, in caso vi fossero molte celle ombreggiate o danneggiate, la caduta di tensione sarebbe elevata dal momento che molti diodi entrerebbero in funzione ciascuno con il proprio decremento di tensione. Per questo motivo solitamente nei moduli fotovoltaici si utilizza un solo diodo ogni 20 celle collegate in serie. Il diodo Dp fa sì che la ISC della serie non sia più limitata al valore peggiore (a’) ma sia pari a quello delle rimanenti celle in serie con I-V migliore→ la riduzione in termini di potenza prodotta risulta più contenuta rispetto al caso senza diodo di bypass. Consideriamo un esempio con 2 moduli: in blu quello normale, mentre in verde lo scadente con il diodo di bypass. Quando la tensione diventa negativa, il diodo di bypass fa impennare la curva risultante verso l’alto evitando che diventi troppo negativa. Quando ciò avviene viene sostanzialmente recuperata la corrente di cortocircuito. NB: con 2 moduli connessi in serie la potenza è sempre più bassa della somma delle singole potenze massime PM1 e PM2 e ciò è dovuto ovviamente, al fenomeno del mismatch . MISMATCH NEI COLLEGAMENTI (PARALLELO) Collegando più celle e più moduli fotovoltaici in serie è possibile aumentare la tensione e dunque la potenza dell’impianto. Tuttavia quando si raggiunge un valore di tensione pari a 1000 V non è più possibile collegare ulteriori elementi in serie perché non è sicuro lavorare con alti valori di tensione. Qualora fosse necessario aumentare ulteriormente la potenza dell’impianto è possibile collegare gli altri elementi in serie in modo da non aumentare ulteriormente la tensione, ma incrementare questa volta il valore di corrente e dunque la potenza. Analogamente al discorso per il collegamento serie, se tra Np celle connesse in parallelo una presenta una curva I-U diversa dalle altre (curva a) , la risultante (curva c) è fornita dalla somma , per una data tensione , delle correnti (Np – 1)*I delle celle aI non oscurate ( curva b a tratti) con la corrente della cella in ombra. La caratteristica risultante ha una corrente di corto circuito ISC pari alla somma delle ISC,i delle singole celle e una tensione a circuito aperto molto prossima a quella della cella oscurata, cioè: ISC = ∑𝑛𝑖=1 𝐼𝑆𝐶,𝑖 ; la tensione di cortocircuito sarà invece pari a quella della cella peggiore, ossia quella difettato o in ombra→ 𝑈𝑂𝐶 ≈ (𝑈𝑂𝐶 )𝑚𝑖𝑛 . È facile vedere che se una cella è oscurata, il parallelo delle celle si comporta nei riguardi del carico circa come il parallelo di Np-1 celle illuminate. La condizione peggiore per la cella oscurata si ha con carico esterno nullo, perché in tale condizione la cella oscurata è costretta ad assorbire la corrente delle Np-1 celle illuminate. La sovra-temperatura, conseguente a questa elevata corrente, può causare il fuori servizio della cella. Il parallelo riprende a funzionare con Np-1 anziché con Np celle, se la cella “rotta” si comporta come un circuito aperto. In alternativa, le celle si possono trovare in corto circuito. Si osserva che è molto rara la connessione in parallelo di singole celle. NB: nei riguardi del carico la connessione delle celle in parallelo ha un effetto meno deleterio del caso della connessione serie. un diodo Ds connesso in serie alle singole celle potrebbe evitare che esse funzionino con corrente inversa. Esso infatti, funzionerebbe come diodo di blocco della corrente inversa. Tuttavia, tale protezione è inaccettabile per il parallelo delle singole celle (la caduta di tensione sui diodi è simile alla tensione generata e la potenza prodotta sarebbe assorbita totalmente dal diodo) e bisogna applicarla a stringhe di molte celle in serie, così da rendere trascurabili le perdite. È possibile apprezzare una soluzione di questo tipo nella figura a fianco a destra. Se consideriamo un esempio con 2 moduli, in blu quello normale ed in verde quello con il diodo di blocco, possiamo notare che il diodo di blocco deforma pesantemente la curva della corrente facendola aderire all’asse orizzontale→ si ha solo una piccola corrente inversa che elimina una piccola percentuale di tensione. NB: anche in questo caso la potenza massima è sempre più piccola della somma delle singole potenze massime. In conclusione, quanto appena esposto, dimostra la necessità di adottare nei collegamenti serie e parallelo celle dotate di caratteristiche corrente-tensione quanto più vicine possibili. Ciò richiede in sede costruttiva un’accurata scelta e per cui, si scelgono celle con valori simili di corrente di cortocircuito, di tensione a circuito aperto e di potenza massima; nonostante ciò si stima, una perdita del 2/3 % a causa del mismatch ed anche un’accurata selezione non previene da rischi esterni, quali l’ombreggiatura. Struttura dei moduli fotovoltaici Il modulo fotovoltaico anche detto pannello fotovoltaico è composto dalla serie o dal parallelo di un certo numero di celle solari che possono essere connesse in serie o parallelo in modo tale da ottenere delle potenze in uscita maggiori. La cella solare non è altro che un diodo a semiconduttore di grande sezione e il parametro che definisce i vari tipi di celle è l’energy gap. I materiali più utilizzati sono: silicio policristallino (1,12 eV), silicio monocristallino (praticamente medesimo salto di banda del policristallino), silicio amorfo (1,75 eV), film sottile CIS (1,05 eV) e film sottile CdTe (1,45 eV). Va sottolineato che c’è una grande variabilità nell’efficienza dei materiali commerciali usati nell’industria del fotovoltaico: 1) m-Si (15-21%), 2) p-Si (14-16%), 3) a-Si (6-10%), 4) CdTe (13-15%) e 5) CIS (11-13%). A questa efficienze variabili corrisponde una differente superficie richiesta per 1 KW: 5-7 m2 (1); 6-8 m2 (2); 10-17 m2 (3); 7-10 m2 (4),(5). Circa la fabbricazione di moduli in silicio cristallino, si osserva che le celle in materiale monocristallino sono di forma rotonda per la tecnica di accrescimento del cristallo e possono successivamente assumere la forma quadrata con uno scarto di materiale; invece quelle in materiale policristallino sono di forma quadrata, consentendo una migliore occupazione della superficie rettangolare del modulo. Dalle celle si giunge poi ai moduli veri e propri attraverso un processo di laminazione per l’incapsulamento ( sottovuoto a 140-150 °C). Le celle sono saldate tra loro e racchiuse tra due pannelli piani, un vetro anteriore con spessore di 3-4 mm, molto pesante e ad alta trasmittanza così da far passare la maggiore quantità di radiazione solare possibile. Più internamente al pannello, si ha uno specifico polimero termoplastico detto E.V.A. che avvolge la cella solare ed inoltre permette la sua saldatura alle altre celle (processo di laminazione). Questo materiale si basa su una tecnologia analoga a quella dei parabrezza delle automobili, infatti se viene colpito, il vetro si frattura, ma non si stacca proprio grazie al materiale polimerico. L’E.V.A. garantisce inoltre, l’isolamento elettrico tra le celle, impedisce la penetrazione dell’umidità ( e relativi effetti corrosivi), ma è sensibile alle alte temperature. All’ interno della cella si hanno i cosiddetti bus-bar ai quali vengono saldati dei collegamenti a nastro che permetto il collegamento tra le celle; questi collegamenti sono pio saldati all’elettrodo posteriore della cella adiacente. Sulla parte posteriore si ha un vetro o materiale plastico (tedlar). Infine il modulo può essere incorniciato o meno in un telaio di alluminio(scatola di giunzione), che viene inserito attraverso una guarnizione nel modulo, ne aumenta l’isolamento, garantendo un funzionamento più duraturo. Le scatole di giunzione ospitano il diodo di bypass ed i morsetti di collegamento; attualmente, si preferiscono quelle da cui fuoriescono i connettori ed inoltre, se il diodo va fuori servizio, andando in cortocircuito, non permetto al modulo di lavorare correttamente. NB: qualora sia richiesto un’installazione del modulo sollevata dal tetto, così da garantire ricircolo d’aria e raffreddamento del modulo stesso, è necessario disporre di sostegni metallici al fine si sollevarlo. CARATTERISTICHE TECNICHE E DATI DI TARGA Il rendimento e tutti gli altri parametri elettrici di un modulo fotovoltaico dipendono dalle condizioni metereologiche in cui il medesimo opera. Per tale ragione, è stato necessario fissare dei parametri di riferimento quando si misurano le caratteristiche di un modulo e da riportare nella sua scheda tecnica. Sono state così definite le condizioni di prova normalizzate, standard test conditions (STC). In queste condizioni l’irradianza è G=1000 W/m2, la temperatura di cella è 25 °C e la massa d’aria AM=1,5. Queste condizioni sono riproducibili soprattutto in primavera ed in autunno e permettono di avere dei rendimenti globali per le celle di circa il 2% superiori rispetto a quelli invernali. In generale, è difficile trovare queste condizioni di funzionamento e sono appunto delle condizioni di laboratori, per cui si fornisce anche la temperatura di cella di lavoro normale , NOCT (Normal Operating Cell Temperature) , ossia la temperature di equilibrio delle celle di un modulo, posto al sole, in condizioni normalizzate (CEI EN 60904-3): irradianza G=800 W/m2 , temperatura ambiente di 20°C, massa d’aria AM=1,5 e velocità del vento di 1 m/s. La NOCT si riferisce all’installazione su cavalletto e tipicamente varia tra 42 e 50°C ; i valori più alti si riferiscono all’installazione integrata sugli edifici. La conoscenza di questa temperatura ci permette di calcolare la temperatura della cella secondo la seguente relazione→ 𝑇𝑐 = 𝑇𝑎 + 𝑁𝑂𝐶𝑇 − 20°𝐶 𝐺(𝑊/𝑚2 ). 800 𝑊/𝑚2 PROVE DI TIPO E CERTIFICAZIONI Sono state codificate alcune prove tipo (effettuate su un lotto di produzione) finalizzate a valutare la corretta prestazione dei moduli nel corso della loro vita utile ( anche più di 25 anni) simulata con invecchiamento artificiale. Si hanno, la CEI EN 61215 per il silicio cristallino e la CEI EN 61645 per film sottili. Esse prevedono: ispezione visiva; prestazioni a STC; prova di isolamento che è necessaria per garantire la sicurezza del modulo e viene effettuata applicando 1000V tra cornice in alluminio e i morsetti “+” e “-“ in cortocircuito, si misura poi la corrente dispersa e il loro rapporto è la Riso (deve anche decine di ohm); misura dei coefficienti di temperatura α,β e 𝛾; misura di NOCT e relative prestazioni; prestazioni a basso irraggiamento; prova di esposizione esterna; prova di tenuta al surriscaldamento localizzato; prova ai raggi UV; prova dei cicli termici che prevede 200 cicli tra -40°C e +85°C; prova di umidità e congelamento; prova di caldo umido che prevede il modulo sottoposto ad alta temperatura e umidità relativa (85°C e RH=85%); prova di robustezza dei terminali; prova di svergolamento; prova di caricamento meccanico; prova di grandine per chicchi dal diametro di 2,5 cm e alla velocità di 90 Km/h. Vengono inoltre, effettuate delle prove specifiche per i moduli a film sottili, in quanto essi sono privi della giunzione di alluminio e della guarnizione di isolamento e di conseguenza hanno un isolamento più scarso. Tali prove sono: esposizione prolungata alla luce, ricottura, prova di corrente di dispersione in ambiente umido. Esistono poi, delle prove aggiuntive effettuate per moduli FV effetti da mismatch che vengono effettuate con fotocamere funzionanti a diverse lunghezze d’onda: • 7,5-13 µm per identificazione hot-spot, vengono eseguite con il modulo in funzione e permettono anche di rilevare possibili riscaldamenti della giunzione; • 7,1-1,2 µm per elettroluminescenza che viene attuata al buio, alimentando il modulo e stimolandolo ad emettere radiazioni (come un led). REQUISITI Tranne casi particolari, i moduli FV utilizzati in impianti di servizio in parallelo alla rete, devono avere le parte attive isolate in classe II , ovvero in doppio isolamento così da avere protezione combinata contro contatti diretti ed indiretti. È inoltre, molto importante la garanzia offerta dai costruttori: - Garanzia di prodotto contro i difetti di fabbricazione dei materiali che deve coprire almeno 2 anni e può arrivare fino a 10 anni; - Garanzia di prestazioni riguardante il decadimento delle prestazioni. La potenza misurata a STC deve essere non inferiore a 90% della potenza minima per almeno 10 anni e a non meno dell’80% della potenza minima per almeno 25 anni. Generatore fotovoltaico completo Per ottenere una potenza prefissata è necessario collegare tra loro vari moduli FV; ognuno di essi infatti può avere una potenza che va dai 10 a 220 Wp. Nello specifico indichiamo con la parola stringa un gruppo di moduli ( o celle), meccanicamente preassemblati e elettricamente collegati o in serie, utilizzabile come unità indipendente da installare nell’impianto; le diverse stringhe possono poi essere collegate in parallelo e costituire un array (come in figura). Il campo fotovoltaico è infine l’insieme di tutti gli array che costituiscono il generatore fotovoltaico completo. All’interno della struttura completa possiamo poi riconoscere altri elementi quali, diodo di blocco(2), diodo di bypass (3) e interruttore di manovra/sezionatore (1). La curva corrente- tensione di un generatore FV è una “replica”, in scala ampliata, di quella della cella con efficienza di conversione indipendente dalla potenza in uscita. La struttura del generatore è modulare con possibilità di fare esperienza su potenze limitate, incrementabili nel futuro. Il generatore FV, a differenza dei normali generatori, lavora con potenza di ingresso indipendente dal carico, poiché la generazione della potenza dipende dalla radiazione solare, perciò presenta: - Efficienza massima quando la potenza utilizzata è massima (condizione di adattamento del carico al generatore); Sovra-temperatura massima a circuito aperto e temperatura operativa minima quando la potenza consegnata al carico è massima (nel caso dei normali generatori è esattamente il contrario). I generatori FV lavorano meglio a bassa temperatura. A pari irradianza globale , se la temperatura è bassa (inverno), i rendimenti sono più alti (rispetto all’estate). Tuttavia, il parametro più importante è l’energia prodotta ed ovviamente è maggiore in estate, ovvero quando la radiazione solare è maggiore. Il cortocircuito in un generatore FV non è critico poiché la corrente di cortocircuito è dell’ordine della corrente nominale → 𝐼𝑆𝐶 ≈ 1,1𝐼𝑛𝑜𝑚 ; al contrario, in un generatore convenzionale è una condizione critica da evitare poiché → 𝐼𝑆𝐶 ≈ 10𝐼𝑛𝑜𝑚 . Analogamente a quanto già esaminato per le singole celle, i collegamenti serie-parallelo dei moduli, per dissimmetrie (mismatching) dovute a: diversità intrinseca delle caratteristiche I(U), ombratura (shading effect) etc., possono portare a una riduzione di potenza erogata, formazione di "hot spots", per cui è necessario impiegare adatte protezioni. In una stringa di moduli in serie, si connette ad ognuno dei moduli un diodo di protezione (di bypass) in antiparallelo. Questo diodo ha un duplice effetto: protegge dalle tensioni inverse la cella oscurata e fa sì che, con la sua azione di bypass, la potenza erogata dalla stringa si riduca solo del contributo del modulo, evitando che l’intera stringa vada in “fuori servizio”. Per la protezione di dissimmetrie nei collegamenti in serie dei moduli si dispone un diodo di blocco in serie al modulo o all’intera stringa. Questo diodo è percorso dalla corrente generata dalla stringa, ma deve avere una caduta di tensione trascurabile rispetto alla c.d.t. sull’intera stringa, per limitare le perdite di potenza ad essa associate. Se una o più celle in una stringa sono difettose, si crea una dissimmetria nelle tensioni a vuoto fra le stringhe in parallelo, per cui il diodo di blocco funziona da blocco e la stringa considerata non subisce danni, ma non contribuisce alla produzione di potenza. Inoltre il diodo di blocco , in assenza di illuminamento, previene i moduli dall’assorbire corrente di segno inverso dovute a forze elettromotrici inverse generate da motori, accumulatori, ecc… Negli impianti FV installati a terra il numero Np, ossia il numero di stringhe in parallelo, è molto elevato, arrivando anche a 100. Esiste la possibilità di guasto a terra di entrambi i poli di una stringa di un array FV→ per evitare grossi problemi si usano dei fusibili a protezione dei cavi che vengono posti sul negativo e sul positivo di ciascuna stringa. I fusibili hanno come obiettivo la protezione degli isolanti dei cavi e non dei moduli fotovoltaici, in quanto questi ultimi sono in classe II; di fatti, qualora si usassero condutture e quadri in classe II ( a prova di guasto a terra e di cortocircuito), l’uso dei fusibili sarebbe superfluo. Tuttavia, generalmente ciò non viene fatto poiché i costi si alzerebbero eccessivamente. Come detto in precedenza, la corrente di cortocircuito dei moduli è dell’ordine della corrente nominale. Tuttavia, il compito dei fusibili montati su ogni stringa è quello di proteggere porzioni di condutture da correnti di cortocircuito provenienti da altre di stringhe; se abbiamo Ns stringhe, il fusibile deve proteggere la conduttura di una stringa da una corrente di cortocircuito pari a (Ns – 1) 𝐼𝑆𝐶 . La formazione di queste correnti si può avere ad esempio, nel caso di un guasto verso terra di entrambi i poli del generatore. Il caso peggiore si ha con resistenza di guasto nulla; il conduttore di stringa positivo così come quello negativo è attraversato da una corrente di cortocircuito molto grande→ necessaria la presenza dei fusibili, che , una volta entrati in funzione, vanno poi sostituiti. La presenza su entrambi i conduttori del modulo è dovuta alla possibilità che il guasto si verifichi su poli di stringhe diverse. STRINGA COMPLETATAMENTE OSCURATA SENZA DIODI DI BLOCCO È possibile, in certi casi, evitare i diodi di blocco con le loro perdite energetiche. In assenza di diodi di blocco, una stringa completamente oscurata è soggetta ad un funzionamento passivo assorbendo corrente inversa. Quest’ultima raggiunge il proprio valore massimo in corrispondenza del funzionamento a vuoto; come è possibile notare dalla figura sopra la curva corrente tensione della stringa completamente oscurata è sostanzialmente tutta nel quarto quadrante. La potenza assorbita assorbita da una stringa completamente oscurata nel punto di massima potenza delle altre stringhe, è trascurabile; questo risultato è vero, purchè non siano presenti guasti di cortocircuito concomitanti tra i moduli FV. Di conseguenza l’uso o meno del diodo di blocco nel punto di massima potenza non fa molta differenza. Se Np è basso, posso evitare i diodi di blocco, ma bisogna investire su doppio isolamento di quadri e condutture. La corrente inversa in una stringa completamente oscurata dipende dalle stringhe Np in parallelo. Varia da un minimo di 0,5𝐼𝑆𝐶 , nel caso di 2 stringhe in parallelo, fino a raggiungere la 𝐼𝑆𝐶 della cella. I costruttori di moduli in silicio cristallino dichiarano una massima corrente ammissibile più alta. Per i moduli in film sottile bisogna controllare tale valore; l’indicazione pratica è di evitare i diodi di blocco con moduli in silicio cristallino fino a 5 stringhe in parallelo. Nella figura a fianco, la stringa totalmente oscurata è studiata con la convenzione di segno degli utilizzatori( corrente assorbita positiva); di fatti, è conveniente rappresentare la stringa oscurata come un carico così da poter da poter fare l’intersezione con i generatori nei 2 casi, e trovare i corrispondenti 2 Valori di corrente inversa. Se venisse aumentato il numero di stringhe in parallelo, aumenterebbe anche la corrente inversa ed inoltre, la pendenza delle stringhe oscurate tenderebbe idealmente all’infinito. Come già detto però, la corrente inversa presenta un limite al crescere di stringhe in parallelo, ovvero la corrente di cortocircuito 𝐼𝑆𝐶 di una stringa illuminata. Nella figura a fianco è possibile apprezzare l’andamento della corrente inversa, in funzione del numero di stringhe in parallelo. NB: nel caso di presenza di guasti di cortocircuito, la curva della stringa oscurata interseca quella delle stringhe non oscurate in punti corrispondenti a tensioni più basse della Um. È possibile calcolare la corrente inversa attraverso un’approssimazione, basata sull’elettrotecnica lineare, che permette di studiare il comportamento delle stringhe applicando il generatore di thevenin ai dati di targa dei moduli FV. A sinistra si ha l’equivalente per la stringa ombrata e a destra quello per le stringhe illuminate. La corrente inversa, che è detta anche corrente di circolazione, risulta dal collegamento in parallelo della stringa ombrata (corrente entrante nel polo positivo) con le stringhe irradiate (corrente uscente). la tensione ai capi dei morsetti A e B è di fatto una tensione a vuoto e vale 𝑈𝐴𝐵 = 𝑈𝑜𝑚𝑏 + 𝑈𝑜𝑚𝑏 𝐼𝑐𝑖𝑟𝑐 GESTIONE DELL’OMBRATURA NEL PROGETTO In prima battuta, va detto che è fondamentale evitare l’ombratura anche parziale dell’array, ma in certe circostanza la si tollera per brevi periodi di alcuni giorni durante l’anno, ad esempio in autunno e inverno. In fase di progettazione, la configurazione dell’array deve essere studiata in modo da minimizzare l’effetto dei moduli ombrati su quelli ben illuminati. L’ ideale sarebbe che le ombre coprissero stringhe intere, mentre la parte restante dell’ombratura fosse distribuita sulle altre stringhe. Questa soluzione permette di ottenere la massima potenza ad una tensione non troppo bassa, evitando di uscire dalla finestra del MPPT. Consideriamo 2 esempi con diverso numero di moduli FV e diverso grado di ombratura. Consideriamo una array 4X4 con 4 moduli ombrati, si possono avere 2 possibili configurazione; la prima (1) prevede l’ombratura concentrata su una sola stringa ed in questo caso i diodi di bypass non vengono azionati poiché i moduli della stringa sono ugualmente ombrati; la seconda configurazione(2) prevede un’ombratura distribuita, infatti abbiamo un modulo ombrato per stringa. In questo caso, i diodi di bypass lavorano poicè c’è disparità di illuminamento. Si hanno due punti a potenza massima, uno locale ed uno globale, ed inoltre,nel punto di cambio di pendenza, c’è una discontinuità che corrisponde ad un punto di non derivabilità della curva. In questo caso, consideriamo un array 5X10 moduli, con 5 moduli ombrati. Abbiamo anche qui 2 possibili configurazione: la prima prevede un’ombratura distribuita, con un modulo ombrato per ogni stringa, la seconda prevede un’ombratura concentrata con 5 moduli ombrati presenti nella medesima stringa, quest’ultima soluzione è preferibile poiché il punto di max globale lo troviamo spostato a destra per una tensione più elevata. Tuttavia, la differenza tra le due curve non è così marcata come in precedenza. In conclusione, non è possibile affermare che è sempre meglio concentrare l’ombratura su una singola stringa piuttosto che ripartirla sulle stringhe dell’array. Nella fattispecie, la percentuale di moduli ombrati è consistente (ad esempio il 25%), è meglio concentrare l’ombratura su una stringa per ottenere una potenza più alta; in questo modo si blocca anche la tensione che si ha nel punto a potenza massima al valore che si ha senza ombratura. Quando la percentuale di moduli ombrati non è consistente (ad esempio il 10%), può accadere che sia meglio distribuire l’ombratura , pur con lo svantaggio della riduzione della tensione corrispondente alla potenza massima Pmax( ciò potrebbe dare dei problemi al tracker , ossia all’inseguitore dei punti di massima potenza). NB: l’azione dei diodi di bypass, pur ripristinando la corrente dei moduli irradiati, genera dei massimi locali sulla curva potenza-tensione. Inverter e MPPT: principio di funzionamento INVERTER Quando in un impianto FV si alimentano carichi in alternata, è necessario dotarsi di inverter DC-AC. I primi inverter si basavano su interruttori elettronici a tiristori (SCR) e potevano trasferire potenza dal lato DC al lato AC solo in presenza della tensione di rete (line commutated). I tiristori sono costituiti da 3 morsetti, di cui un morsetto di comando, che comanda la chiusura del tiristore, che permette il passaggio di corrente, con un ritardo rispetto al segnale di riferimento( Vrete a 50/60 Hz)→ questo fa assorbire potenza reattiva alla rete. Tuttavia, i tiristori non sono comandabili in apertura, tant’è che lo spegnimento del tiristore avviene naturalmente quando la corrente giunge ad annullarsi. Con l’avvento dei transistor, si è potuto generare forme d’onda alternate e trasferire potenza dal lato DC al lato AC in assenza della tensione di rete (self commutated)→ non ha bisogno di una tensione di riferimento che applichi una polarizzazione diretta. In transistor di potenza sono interruttori elettronici, comandabili in chiusura ed apertura ( a differenza del SCR), in anticipo(correte induttiva) e in ritardo(corrente capacitiva) rispetto ad un segnale di riferimento che viene generato da un “clock” interno al convertitore. Ciò significa che è possibile generare o assorbire potenza reattiva con forma d’onda a basso contenuto armonico, rispetto agli inverter a tiristori (onda quadra). NB: l’onda quadra ha come sviluppo in serie di Fourier quello costituito dalle armoniche dispari; nello specifico, se prendiamo individualmente, ad esempio la terza armonica, è possibile constatare che la sua ampiezza è un terzo di quella della prima armonica e man mano che aumenta la frequenza dell’armonica, l’ampiezza dell’oscillazione diminuisce tanto da non essere più rilevabile. Un semplice convertitore AC-DC con SCR e carico resistivo: l’angolo di accensione 𝜗 (o α) è il ritardo e con riferimento alla figura, si ha che 𝜗1 < 𝜗2 < 𝜗3 . I transistor hanno basse perdite (𝑖𝐺 ≈ 0) e le perdite di conduzione sono funzione lineare o quadratica della corrente. I MOSFET sono caratterizzati dai morsetti gate, source e drain: il segnale di comando è la tensione 𝑣𝐺𝑆 (𝑡),mentre la tensione d’uscita è 𝑣𝐷𝑆 (𝑡) e le perdite 𝑅𝐷𝑆 𝑖𝐷2 sono funzione della resistenza drain-source ( perdite quadratiche con la corrente di carico, di drain); gli IGBT sono caratterizzati dai morsetti gate, collettore ed emettitore: il segnale di comando è 𝑣𝐺𝐸 (𝑡), mentre la tensione in uscita è 𝑣𝐶𝐸 (𝑡) e le perdite sono lineari con la corrente di carico (di collettore) e valgono 𝑣𝐶𝐸 𝑖𝐶 . A sinistra è rappresentato un circuito di misura per la prova di laboratorio in cui abbiamo ,nella parte sinistra del medesimo, il circuito di comando, in cui non è presente l’amperometro poiché la corrente è trascurabile, mentre nella parte destra è presente il circuito di potenza. NB: il segnale di comando permette lo switch dallo stato ON allo stato OFF. La modalità di accensione/spegnimento dei transistor avviene secondo la tecnica di modulazione PWM (pulse width modulation). Quest’ultima si basa sul confronto tra una forma d’onda triangolare(portante) , generata con un clock al quarzo e ad alta frequenza (1-500 KHz) e la forma d’onda sinusoidale da riprodurre (modulante) che è a frequenza di rete ( 50 o 60 Hz). Il parametro di regolazione principale è l’indice di modulazione m che rappresenta il rapporto tra l’ampiezza della sinusoide e quella della triangolare. A seconda del valore di m possiamo avere 2 casi: • Caso normale→ 𝒎 ≤ 𝟏: aumentando la frequenza della portante, in un suo periodo la sinusoide è quasi costante. Per quanto concerne la tensione in uscita , essa è unipolare in uscita a 3 livelli (V+,0,V-) e l’impulso risulta più ampio in prossimità della semionda. Va inoltre sottolineato, come si evince dal grafico, le intersezioni tra i 2 segnali (portante e modulante) determinano passaggio tra stato di ON e stato di OFF; • Caso anomalo → m>1: in questo caso si ha la cosiddetta sovramodulazione con l’ampiezza della sinusoidale maggiore di quella della triangolare. Si ottiene una forma d’onda quadra in uscita che, come sappiamo, ha un elevato contenuto armonico. Consideriamo ora il caso di un inverter a ponte a H (ad esempio a 2 gambe e 4 inverter, 2 per gamba), nel quale viene chiuso solo un interruttore per “gamba”, mentre l’altro deve restare aperto per evitare cortocircuiti sul lato DC. Se sono in ON lo switch superiore (sx) e quello inferiore (dx), si applica in uscita una tensione positiva; con un transistor e un diodo superiori in , si applica tensione nulla; si applica tensione negativa con lo switch superiore della gamba destra e lo switch inferiore della sinistra. In figura si notano inoltre altri componenti importanti, quali: il condensatore Crip , che compensa la fluttuazione sulla potenza istantanea, così da renderla pressochè costante; il filtro LC per ottenere una forma d’onda quanto più sinusoidale possibile che può essere visto anche come un filtro passa-basso poiché non permette il passaggio della armoniche ad alta frequenza. Esso svolge inoltre anche il ruolo di disaccoppiare l’inverter dalla rete; infine abbiamo il trasformatore che fornisce il livello necessario di tensione al carico. Proprio in base al trasformatore di interfaccia col carico si distinguono i vari inverter: ➢ Con trasformatore in bassa frequenza (50/60 Hz), di forma toroidale (ingombrante), se monofase; ➢ Con trasformatore ad alta frequenza (20-100 kHz) in ferrite (di ridotte dimensioni) per ridurre le perdite nel ferro; ➢ Senza trasformatore ma con convertitore DC-DC (MPPT) con ampio campo di variazione di tensione. NB: nell’inverter trifase esistono 3 gambe uguali con 6 switch ed è possibile applicare una terna simmetrica di tensioni concatenate. NB: Solo col trasformatore a bassa frequenza si ottiene l’isolamento galvanico (separazione elettrica tra primario e secondario). Il trasformatore in alta frequenza presenta parametri capacitivi parassiti tra primario e secondario, che non garantiscono l’isolamento galvanico. I trasformatori eliminano eventuali componenti continue al secondario, pur a prezzo di una certa saturazione del nucleo magnetico. Posso disegnare il circuito equivalente in AC per la prima armonica: si deve fare in modo che la tensione dell’inverter 𝑉𝐼 abbia un certo angolo di anticipo β così che la corrente I sia in fase con la tensione di rete 𝑉𝐺 , massimizzando il fattore di potenza. I parametri Lp e Rp sono dei parametri parassiti, mentre LD è un’induttanza di progetto che serve sia per il filtro sia per il disaccoppiare il generatore di tensione dell’inverte dal generatore di tensione della rete. Posso rappresentare con i fasori le corrente e le tensioni e poi calcolare le potenze. La XL è la somma delle 2 reattanze serie, mentre la potenza attiva e la potenza reattiva dell’inverter valgono rispettivamente: 𝑃𝑖𝑛𝑣 = 𝑉𝐼 𝐼𝑐𝑜𝑠 𝛽 = 𝑉𝐺 𝐼 + 𝑅𝑝 𝐼 2 e 𝑄𝑖𝑛𝑣 = 𝑉𝐼 𝐼 𝑠𝑖𝑛 𝛽 = 𝑋𝐿 𝐼 2, dove la potenza reattiva prodotta dall’inverte serve per il funzionamento della reattanza di disaccoppiamento. Si trovano in commercio inverter senza trasformatore ("transformerless") che permettono di ottenere perdite a vuoto ridotte e quindi rendimento elevato con un peso e un volume minore. Per contro, tali inverter trasferiscono componenti continue verso la rete e possono creare problemi di sicurezza. Correntemente, gli inverter per connessione alla rete hanno uno stadio di ingresso che svolge la funzione di inseguitore del punto di massima potenza del generatore FV (MPPT). Le specifiche, per gli inverter da connessione alla rete (grid connected), sono qui riassunte: - - Alto rendimento di conversione (𝜂 > 90% per potenze decrescenti fino al 10% della nominale) e basse perdite a vuoto (𝑃0 < 1%); Fattore di potenza PF≈ 𝑐𝑜𝑠𝜑 > 0,9; Bassa distorsione armonica della corrente d’uscita (THD < 5% alla potenza nominale ); Inseguimento del punto di massima potenza (MPPT); Capacità di limitare la potenza di ingresso dal generatore FV spostandone il punto di funzionamento; Bassa ondulazione (ripple) sulla tensione DC; Accensione e spegnimenti automatici con basse soglie di irradianza. Nelle figure a fianco sono rappresentati gli andamenti dei parametri citati quali, rendimento di conversione DC-AC, rendimento di inseguimento MPPT, fattore di potenza e distorsione armonica totale della corrente. Nella fattispecie il rendimento di conversione è calcolabile attraverso la relazione 𝜂𝐷𝐶−𝐴𝐶 = 𝑃 𝑃𝐴𝐶 𝐴𝐶 + 𝑝𝑒𝑟𝑑𝑖𝑡𝑒 𝑃𝐴𝐶 2 𝑃𝐴𝐶 + 𝑃0 +𝑐𝑄 𝑃𝐴𝐶 = , dove la 𝑃𝐴𝐶 = 𝑉𝑟𝑚𝑠 𝐼𝑟𝑚𝑠 𝑐𝑜𝑠 𝜑. Come si evince dalla formula del rendimento di conversione, così come in un trasformatore, anche in un inverter ci sono perdite a vuoto, che devono essere più basse possibili, poiché sono presenti anche in assenza di potenza trasferita→ si consuma potenza solo per inviare segnali di comando ai circuiti di potenza, ma anche perdite quadratiche che si possono definire anche perdite a carico e sono di tipo resistivo. MPPT Per ottimizzare il rendimento il rendimento di utilizzazione del generatore FV, può essere impiegato un convertitore DC-DC opportunamente controllato, che viene definito maximum power point tracker (MPPT) e che , al variare di irradianza e temperatura, consente di estrarre la potenza massima erogabile e di trasferirla al carico con valori di tensione e corrente differenti. I convertitori DC-DC sono di vario tipo : abbassatori (step down o buck), elevatori (step up o boost) oppure misti ( buck/ boost). Essi si compongono di elementi chiave quali, transistor (switch), diodi di ricircolo, induttori e condensatori. A fianco è presentato un convertitore buck. Dal punto di vista matematico, questo tipo di convertitore è assimilabile ad un trasformatore e il rapporto tra tensione in uscita e tensione in ingresso prende il nome di duty cycle. Quando l’interruttore è chiuso, il diodo è polarizzato inversamente e non conduce, la tensione sull’induttore ha il polo positivo a sinistra e ciò vuol dire, che si sta caricando; quando l’interruttore è aperto, il diodo conduce poiché polarizzato direttamente, la tensione sull’induttore ha il polo positivo a destra, si sta cioè scaricando, mentre la corrente mantiene lo stesso verso di prima. NB: la corrente nell’induttore è la composizione di un valor medio ed un ripple. Le tecniche di controllo possono attuate secondo vari algoritmi; ➢ Conduttanza incrementale: è il più preciso e sfrutta la proprietà di adattamento del carico. In particolare si sfrutta il fatto che − 𝑑𝐼⁄𝑑𝑈 = 𝐼⁄𝑈 , ovvero che la derivata della corrente rispetto alla tensione è uguale al rapporto tra corrente e tensione nel punto a potenza massima; ➢ Perturba e osserva: è la tecnica più usata, in quanto è un buon compromesso tra costi e prestazioni. Il controllo impone una variazione di tensione ∆V e misura la corrispondente variazione di potenza ∆P, se quest’ultima è positiva, si attua un’ulteriore variazione di tensione nella stessa direzione, altrimenti si cambia il segno della variazione; ➢ A tensione costante: algoritmo meno preciso che prevede la misurazione della tensione a vuoto VOC e l’imposizione di una tensione di lavoro proporzionale a quest’ultima (0,7-0,8 VOC). Se si usa la conversione analogico-digitale (convertitore ADC), il segnale è rappresentato da una parola binaria in notazione polinomiale 𝑉𝑖𝑛 = 𝑉𝑟𝑒𝑓 (𝑏1 2−1 + ⋯ + 𝑏𝑛 2−𝑛 ). il metodo perturba e osserva può non trovare la tensione 𝑉𝑀𝑃𝑃 a causa dell’errore di quantizzazione nel calcolo della potenza. Tuttavia, è possibile diminuire tale errore aumentando il numero di bit (senza aumentare troppo la durata della ricerca). Se ad esempio infatti volessimo convertire il valore analogico con 4 bit, avremmo un errore di circa il 6% → 2-1+ 2-2+2-3 + 2-4= 0,5+0,25+0,125+0,625=0,9375. Se la caratteristica del carico ha l’andamento OA, con irradianza G e temperatura T, il MPPT per assorbire la massima potenza dal generatore FV, lavora in entrata a tensione UM e corrente IM, mentre in uscita, per fornire questa PM, a tensione UM’ e corrente IM’, dove queste ultime sono le coordinate del punto M’ che è il punto di intersezione tra la caratteristica OA e l’iperbole a potenza costante, tangente in M alla caratteristica gel generatore (MPPT di rendimento unitario). Con riferimento alla tensione, tale MPPT dicesi in discesa ("step-down"); perciò una caratteristica di carico di tipo OB richiede un MPPT in salita ("step-up"); una caratteristica di tipo OC richiede un MPPT in discesa, per irradianza inferiore a G' e in salita per irradianza maggiore di G'. in sostanza il compito del MPPT è campionare l’uscita del generatore ed applicare la resistenza di carico più consona ad ottenere la massima potenza. Oggigiorno, si hanno efficienze maggiori del 98% nell’inseguimento della potenza massima per un ampio intervallo di irradianza (50-100 W/m2) e di tensione (100-600V). Si può tuttavia verificare instabilità e spostamento dal punto ottimale a causa di brusche variazioni di irradianza (passaggio di nuvole). NB: il MPPT è inglobato negli inverter, e il rendimento di conversione è il prodotto del rendimento dell’inverter e del MPPT → 𝜂𝑃𝐶𝑈 = 𝜂𝐷𝐶⁄𝐴𝐶 𝜂𝑀𝑃𝑃𝑇 . Producibilità di un impianto fotovoltaico Nel progetto di un impianto FV connesso a rete è importante valutare, il più correttamente possibile, la producibilità annuale EAC che altro non è che la somma delle energie giornaliere. Le formule usate per valutarla possono essere: 𝐻𝑔 ⁄𝐺 𝑆𝑇𝐶 = 𝑃𝑁 ℎ𝑒𝑞 𝑃𝑅, dove 𝐻𝑔 è l’irradiazione annuale sul piano inclinato 1) 𝐸𝐴𝐶 = 𝐻𝑔 𝑆𝑃𝑉 𝜂𝑆𝑇𝐶 𝑃𝑅 ,da cui attraverso sostituzioni ( 𝜂𝑆𝑇𝐶 = otteniamo la seconda formula→ 2) 𝐸𝐴𝐶 𝑃𝑁 ) 𝐺𝑆𝑇𝐶 𝑆𝑃𝑉 e ponendo ℎ𝑒𝑞 = (kWh/m2), è di tipo globale e tiene conto dell’irradiazione diretta (80% nelle belle giornate) e irradiazione diffusa (20% nelle belle giornate, ma l’unica presente nelle giornate nuvolose); 𝑆𝑃𝑉 è la superficie totale del generatore FV; 𝜂𝑆𝑇𝐶 è l’efficienza nominale dei moduli; 𝑃𝑁 la somma delle potenze di picco ( STC); ℎ𝑒𝑞 è il numero di ore equivalenti per anno; PR (performance ratio) rappresenta la dipendenza dalla temperatura delle perdite termiche ed è un parametro di confronto negli impianti FV. Un’altra interpretazione della formula implica il concetto di resa (yield) per la stima della producibilità giornaliera, mensile e annuale EAC: 𝐻 𝑬𝑨𝑪 = 𝑷𝑵 𝒀𝑹 𝑷𝑹 = 𝑷𝑵 𝒀𝑭 , dove 𝒀𝑹 è la resa di riferimento o peak solar hours ( 𝑔⁄𝐺 in h/giorno, 𝑆𝑇𝐶 h/mese e h/anno); 𝒀𝑭 è la resa finale (𝐸𝐴𝐶 ⁄𝑃𝑁 in h/giorno, h/ mese e h/anno); 𝑷𝑵 è la somma delle potenze nominali dei moduli FV(STC) e PR è il rapporto di trasformazione utile per confrontare gli impianti FV. FONTI DI PERDITA Nel PR sono comprese varie fonti di perdita (o raramente guadagni) e le principali sono: 1. Tolleranza rispetto ai dati STC e mismatch intrinseco delle caratteristiche corrente-tensione I-V dei moduli; 2. Sporcizia e riflessione del vetro frontale; 3. Spettro solare diverso da quello di riferimento (AM=1,5); 4. Cablaggi, diodi di blocco, fusibili e interruttori; 5. Sovra-temperature (o sotto) rispetto a 25°C; 6. Illuminazione non uniforme su tutti i moduli (shading effect); 7. MPPT e conversione DC-AC dell’inverter. 𝑃𝑅 = 𝜂𝑚𝑖𝑠 𝜂𝑑−𝑟 𝜂𝑠𝑝𝑒𝑐 𝜂𝑤𝑖𝑟 𝜂𝑡𝑒𝑚𝑝 𝜂𝑠ℎ𝑎𝑑 𝜂𝑃𝐶𝑈 NB: i parametri della formula convenzionale di producibilità sono conoscibili con ridotta precisione e questo è un difetto importante. I dati di certificazione dei moduli FV sono ottenute con prove in laboratorio a luce simulata su un campione ridotto della popolazione (<1%); i flash reports sono dati senza incertezza del costruttore; il valore di progetto del PR è 0,75, ma i valori reali stanno nell’intervallo 0,55-0,85, secondo la presenza delle fonti di perdita; ℎ𝑒𝑞 è calcolato con la norma UNI 10349 che è del 1994. Pertanto, si propone un nuovo significato nella formula di producibilità. La procedura ha come scopo di ridurre le incertezze nella valutazione energetica e comprende due fasi: la prima con 2 prove sperimentali, la seconda con l’elaborazione del database delle variabili ambientali. La prova sulla potenza nominale dell’array FV tiene conto delle voci da 1 a 4, la prova sull’efficienza tiene conto della voce 7. Riguardo il parametro ℎ𝑒𝑞 e la voce 5, i dati di irradiazione e temperatura sono forniti dell’ARPA. Un semplice calcolo può essere eseguito per valutare l’irradiazione sull’angolo tilt e le perdite di sovratemperatura mediante il fattore 𝑘 𝑇𝑒𝑚𝑝 . In definitiva, si riscriva la formula così: 𝐸𝐴𝐶 = 𝑃𝑀 ℎ𝑒𝑞 𝑘 𝑇𝑒𝑚𝑝 𝜂𝑃𝐶𝑈 Sistema automatico di acquisizione dati Il SAAD si basa su una scheda DAQ con 16 bit di risoluzione , 8 canali differenziali, 50 kSa/s di frequenza di campionamento per canale; il SAAD è adatto per misure DC/AC (DFT fino alla 50a armonica). Le portate sono estese a 1000 Vpk e 2000 Apk con incertezze tipiche di: ±0,1%𝑝𝑒𝑟𝑙𝑎𝑡𝑒𝑛𝑠𝑖𝑜𝑛𝑒, ±0,5 − 1%𝑝𝑒𝑟𝑙𝑎𝑐𝑜𝑟𝑟𝑒𝑛𝑡𝑒, ±0,6 − 1,1%𝑝𝑒𝑟𝑙𝑎𝑝𝑜𝑡𝑒𝑛𝑧𝑎𝑒 ± 2,5%𝑝𝑒𝑟𝑙 ′ 𝑖𝑟𝑟𝑎𝑑𝑖𝑎𝑛𝑧𝑎. Gli strumenti virtualizzati in ambiente Labview comprendono un oscilloscopio a memoria con sistema di trigger e un data logger multicanale. Circuiti di misura Il transitorio di carica di un adatto condensatore permette di determinare , in una singola scansione(10-100ms) , la caratteristica dinamica I-V di un array FV senza l’uso di carico elettronico; quello cerchiato in rosso è un trasformatore amperometrico ha elemento ad effetto hall necessario per misurare la corrente continua. Per quanto riguarda la misura delle efficienze MPPT e DC-AC, può essere effettuata con prove a carico su inverter monofasi e trifasi; nel caso di inverter trifasi, può essere utile la connessione Aron (sistemi senza neutro) che risulta essere una buona scelta per ridurre i canali da 3 a 2. Per quanto riguarda i risultati sperimentali, è necessario riportare i dati calcolati attraverso le misurazioni alle condizioni STC così da avere la potenza nominale in condizioni operative ed anche i parametri di tensione e corrente. La tensione è fortemente dipendente dalla temperatura, mentre la corrente dall’irradianza. Tale operazioni ci permette di stabilire, confrontando i valori ottenuti con i dati di targa del modulo(ad esempio la potenza nominale) e stabilire se sono soddisfacenti o meno. Analisi economica col metodo del VAN VAN sta per valore attuale netto, ovvero la sommatoria dei flussi di cassa attualizzati (positivi nel caso di ricavi, negativi nel caso dei costi). Nell’analisi economica il costo di funzionamento & manutenzione (per inverter e contatori, pulizia periodica dei moduli) 𝐶𝑂&𝑀 = 1% del costo di installazione, mentre il tasso di interesse reale i*=3%(ad esempio). Se proviamo a calcolare i flussi di cassa, anche futuri, riportati all’istante t=0(ovvero l’istante attuale) abbiamo che : 𝐶𝐹 𝐶𝐹0 = (1+𝑖𝑛∗ ) , la sommatoria dei flussi deve essere riportata all’istante attuale e ciò viene fatto 1 moltiplicandola per un fattore di attualizzazione (1+𝑖∗ )𝑛; quest’ultimo può essere scritto anche come (1+𝑓)𝑛 (1+𝑖)𝑛 , dove f è l’inflazione, mentre i è il tasso di interesse apparente, cioè privo di inflazione e vale 𝑖 = 𝑖 ∗ + 𝑓 ; n è il numero di anni di esercizio degli impianti e solitamente n=25→ i flussi di cassi di ogni anno vengono attualizzati e sommati. A questa somma, bisogna sottrarre i costi iniziali dell’investimento e se quest’ultimo deriva da un prestito bisogna tenere conto della sua restituzione per il calcolo dei flussi di cassa. Per avere un investimento vantaggioso, il valore attuale netto deve essere positivo; negli impianti fotovoltaici ciò generalmente vero, poiché il fotovoltaico costituisce un investimento a lunga durata (circa 25 anni) e a basso rischio poiché la fonte di energia è gratuita e generalmente è caratterizzata da lievi oscillazioni da un anno ad un altro, in termini di produzione energetica. Come si evince dalla penultima voce della tabella i guadagni dopo 25 anni, si aggirano tra il 60 ed il 90%, a seconda della taglia dell’impianto, rispetto al costo iniziale ed inoltre, il numero di anni dopo i quali si inizia a guadagnare è pari più o meno a 10 anni; quest’ ultimo parametro rappresenta il lasso di tempo necessario per rientrare dall’investimento fatto all’installazione dell’impianto. NB: la tabella si riferisce a 10 anni fa, attualmente i costi di installazione sono inferiori e si aggirano tra 1000 e 2000 euro per kWp installato, tant’è vero che il rientro dall’investimento in zone piuttosto favorevoli, ad esempio zone del sud Italia, può avvenire in tempi inferiori a 8 anni. ENERGIA EOLICA L’energia eolica è una fonte di energia “pulita” ed inesauribile, così come l’energia solare. In questo caso, l’energia posseduta dal vento viene trasformata in energia meccanica e poi, quest’ultima è trasformata in energia elettrica. L’efficienza della conversione energetica dipende dal rapporto di velocità tra quella della turbina e quella del vento (tip speed ratio 𝜆). Passando alle prestazioni della turbina nel suo insieme, è arrivato il momento di definire l’efficienza meccanica mediante il coefficiente di potenza Cp. Esso è calcolato come rapporto tra la potenza meccanica generata dalle pale Pmec e la potenza del vento: 𝐶𝑝 = 𝑃𝑚𝑒𝑐 1 𝜌𝐴𝑈 3 2 , dove 𝜌 è la densità dell’aria a livello del mare ed alla temperatura di 15°C e vale circa 1,225 kg/m3 ,mentre A è l’area spezzata dalle pale della turbina eolica. Il valore massimo teorico del coefficiente di potenza è dato dalla teoria del disco attuatore e vale 16/27,ovvero circa 0,59; esso si ottiene quando la velocità che attraversa la sezione della turbina eolica è circa i 2/3 della velocità iniziale del vento (67%) e dopo aver attraversato la turbina eolica il valore della velocità si riduce ulteriormente di 1/3→ la velocità finale del vento è 1/3 (33%) di quella iniziale, non perturbata dalle pale. Le tecnologie ad asse orizzontale hanno un Cp maggiore di quelle ad asse verticale in funzione del rapporto di velocità a punta pala. Tra le turbine ad asse orizzontale con 1,2,3 pale queste ultime hanno efficienza maggiore con velocità di pala minore. Per spiegare da un punto di vista dinamico(energetico) ciò che avviene, si introduce il trinomio di Bernoulli. Quest’ultimo può essere applicato se il sistema non scambia lavoro con l’esterno e si fonda su alcune ipotesi semplificative che prevedono una turbina ideale di spessore infinitesimo lungo la direzione del vento ( teoria del disco attuatore),l’aria è da considerarsi come un fluido ideale(incomprimibile) ed il flusso d’aria è da intendersi in regime stazionario, tutte le variabili dipendono solo dal punto in cui sono calcolate e non variano nel tempo. Il trinomio di Bernoulli nella 1 fattispecie si compone della somma di energia potenziale (mgh), energia cinetica (2 𝑚𝑢2 )ed energia di 1 pressione (pV)→ 𝐸𝑏𝑒𝑟𝑛 = 2 𝑚𝑢2 + 𝑚𝑔ℎ + 𝑝𝑉 = 𝑐𝑜𝑠𝑡., dove m è la massa, u è la velocità del vento, g è l’accelerazione di gravità, h è l’altezza, p è la pressione e V è il volume. La conservazione del trinomio implica che una delle tre forme di energia si possa trasformare in un’altra. In una turbina eolica ideale il processo di conversione dell’energia avviene a energia potenziale costante, ossia la quota della massa d’aria resta costante. Come possiamo vedere dalla figura, la sezione del tubo di flusso in cui è contenuta la massa d’aria aumenta sia prima sia dopo che la massa d’aria incontri la sezione spazzata dalla turbina eolica. Avendo assunto la densità dell’aria costante , abbiamo che, a parità di portata di fluido, la velocità finale (sezione maggiore) è minore di quella iniziale(sezione minore). Prima del contatto con la turbina, così come anche dopo il contatto, si applica il trinomio di Bernoulli per dedurre che alla diminuzione di velocità del fluido corrisponde l’aumento di pressione. Durante il contatto con la turbina, non si può applicare il trinomio di Bernoulli: in questa sezione si ha una discontinuità della pressione con una brusca diminuzione della stessa, a cui corrisponde la generazione di energia meccanica attraverso le pale della turbina. Dopo aver oltrepassato la turbina, la pressione riprende a salire e si riporta al valore di partenza. Queste variazioni nell’andamento della pressione e della velocità sono dovute all’effetto scia prodotto dalla turbine e , una volta esauritosi, entrambe le grandezze tornano ai loro valori iniziali, quando il flusso d’aria era imperturbato.NB: le variazioni di massa e di volume sono costanti→ 𝑑𝑉 𝑑𝑡 𝑑𝑚 𝑑𝑡 = 𝜌𝐴𝑢 = 𝑐𝑜𝑠𝑡 e = 𝐴𝑢 = 𝑐𝑜𝑠𝑡. STRUTTURA DI UNA TURBINA EOLICA (ASSE ORIZZONTALE) Gli aeromotori sono macchine che trasformano l’energia del vento in energia meccanica di rotazione. Le turbine più utilizzate sono quelle ad asse orizzontale ed esse sono in genere installate ad un’altezza dal suolo superiore a 50 m e che può arrivare fino a 100m mediante una torre. Quest’ultima è realizzata in acciaio e pesa circa un centinaio di tonnellate. L’elemento essenziale per la conversione sono le pale che possono avere una lunghezza variabile (tra 10 e 50 m) e possono essere 2 o 3 per turbina; sono realizzate in fibra di vetro composta perlopiù da silicio e sono progettate per massimizzare la portanza. NB: la potenza convertita dalle pale dipende dall’area da esse spazzata, tant’è vero che se la loro lunghezza raddoppia, la potenza convertita quadruplica. Le pale sono fissate al mozzo da cui parte l’albero lento (10-30 rpm), mentre un moltiplicatore di giri aziona l’albero veloce (10001500 rpm). Quest’ultimo trasmette la coppia motrice al generatore elettrico. Tutti questi elementi sono presenti all’interno di un involucro metallico che viene detto gondola o navicella. All’interno di quest’ultima è presente anche una sorta di freno necessario a fermare la turbina in caso di venti estremi che potrebbero danneggiarla. Le regolazioni meccaniche di cui è dotata la macchina eolica sono 3: • Controllo del passo del palo: serve per regolare per una certa velocità del vento la portanza e quindi la coppia motrice sulle pale allo scopo di ottenere una ben precisa velocità di rotazione delle pale; • Controllo di imbardata: permette la rotazione della navicella rispetto alla torre di sostegno in modo da seguire la direzione del vento ed ottimizzare la conversione; • Controllo di inclinazione: permette di sfruttare appieno anche i venti che non giacciono sul piano orizzontale. PRINCIPIO DI FUNZIONAMENTO DELLA TURBINA Consideriamo una vista frontale di una turbina a tre pale, ruotante in senso orario con velocità 𝜔, in presenza di velocità del vento U condirezione normale al piano e verso entrante. Si individua a questo punto una sezione trasversale S-S’ della pala a distanza Rx dal mozzo, prossima alla punta-pala. La sezione trasversale è simile al profilo di un’ala di aereo e la cinematica della pale è descritta dal triangolo delle velocità , i cui lati sono U(velocità del vento), Vx (velocità periferica della sezione della pala) e Wx (velocità relativa del vento nel sistema di riferimento rotante costituito dalla sezione trasversale a distanza Rx). Quest’ultima vettorialmente è la differenza tra la velocità del vento nel SR fisso e la velocità ̅𝑥 = 𝑈 ̅ − 𝑉̅𝑥 . La velocità Vx e quella Wx formano un angolo 𝜑. Facendo poi riferimento al periferica→ 𝑊 centro di pressione della pala è possibile definire altri 2 angoli, l’angolo α detto angolo di incidenza che è quella formato dalla direzione della corda alare e della velocità Wx e l’angolo β detto angolo di passo formato dalla direzione della corda alare e dalla direzione della velocità Vx. Tra questi tre angoli valgono le relazioni 𝜑 = 𝛼 + 𝛽 e 𝑐𝑡𝑔𝜑 = 𝑉𝑥 𝑈 = 𝜆 che hanno particolare importanza, come si vedrà in seguito, dal punto di vista dell’efficienza aerodinamica. Dal punto di vista dinamico, la velocità Wx crea, interagendo con il profilo, due componenti di forza sulla pala, ortogonali tra loro: la componente più rilevante è la portanza (lift) 𝐹̅𝐿 che risulta ortogonale a ̅̅̅̅ 𝑊𝑥 , l’altra è invece la resistenza(drag) ̅̅̅ 𝐹𝐷 che è parallela a ̅̅̅̅ 𝑊𝑥 . A partire da queste 2 componenti di forza, si possono introdurre due coefficienti di proporzionalità utili a calcolare il rapporto “lift su drag” : 𝐶𝐿 = 1 𝐹𝐿 𝜌𝐴𝑊 2 2 e 𝐶𝐷 = 1 𝐹𝐷 𝜌𝐴𝑊 2 ; i due 2 coefficienti sono adimensionali poichè al denominatore si ha una forza, dal punto di vista dimensionale. Questi due coefficienti dipendo dall’angolo di attacco α, tuttavia il coefficiente di portanza risulta più rilevante, aumentando il suo valore fino a poco oltre α=15°(dove arriva a valere anche più di 1,5), laddove inizia bruscamente a decrescere grazie a causa del fenomeno dello stallo. Invece il coefficiente di resistenza risulta sempre crescente al crescere di α, anche se tale crescita avviene secondo ordini di grandezza inferiori a quelli del coefficiente di portanza. Dalla composizione della portanza e della resistenza, si può ottenere una forza risultante 𝐹𝑟𝑖𝑠 che può essere scomposta ulteriormente in altre due componenti, una parallela alla direzione della velocità periferica ed un’altra parallela alla direzione della velocità del vento. La prima, che indichiamo con 𝐹𝐶 è responsabile insieme al braccio Rx della coppia motrice per la pala; la seconda, che indichiamo con 𝐹𝑆 , è la spinta che si carica sulla torre della turbina e che tende a fletterla. NB: la direzione di FL e di FS individuano un angolo che è pari 𝛼. In formule si può scrivere: per la prima componente𝐹𝐶 = 𝐹𝐿 𝑠𝑖𝑛 𝜑 − 𝐹𝐷 𝑐𝑜𝑠 𝜑 , notando che la portanza è responsabile della forza motrice, mentre la resistenza la riduce; per la seconda componente 𝐹𝐶 = 𝐹𝐷 𝑠𝑖𝑛 𝜑 + 𝐹𝐿 𝑐𝑜𝑠 𝜑 , osservando che portanza e resistenza contribuiscono entrambe ad aumentare la spinta, anche se è prevalente la portanza. NB: quando la velocità del vento aumenta troppo non si può inseguire la max efficienza a causa dei limiti meccanici che subentrano a causa della forza centrifuga. Il funzionamento di una turbina eolica per produzione di elettricità avviene in un intervallo di velocità del vento compreso tipicamente tra 4 e 25 m/s, con potenza crescente fino alla saturazione in corrispondenza del valore nominale intorno a 12 - 16 m/s. Se siamo al di sotto della velocità nominale , c’è l’esigenza di aumentare l’efficienza e quindi la potenza generata, mentre al di sopra della velocità nominale, c’è l’esigenza di mantenere la potenza generata costante. Per fare ciò si può mantenere costanti i fattori, o ridurre la velocità di rotazione delle pale, al crescere della forza che produce la coppia motrice(controllo verso lo stallo) oppure ridurre la forza motrice al crescere della velocità delle pale ( controllo verso la bandiera). In particolare, la regolazione della potenza mediante variazione della forza responsabile della coppia si può effettuare in modo passivo, essenzialmente verso lo stallo, e in modo attivo, variando il passo delle pale o verso lo stallo oppure verso la messa in bandiera. La regolazione passiva è quella descritta in precedenza e vale per velocità basse del vento ed in particolare un aumento dell’angolo α, fa sì che ci si avvicini allo stallo con conseguente diminuzione del fattore di potenza. Questa regolazione è economica da punto di vista degli equipaggiamenti della turbina, ma genera importanti sollecitazioni sulla torre e sulle pale a causa della forte spinta. Nella regolazione attiva viene seguito lo stesso principio, ma riducendo la spinta sulle pale, viene attuato lo stallo attivo che prevede la riduzione di β e ciò fa sì che si abbia maggiore velocità ma anche maggiore spinta. Se viene aumentato l’angolo β si ha il controllo verso la messa in bandiera che permette di ottenere un funzionamento più lento, ma allo stesso le sollecitazioni sulle pale e sulla torre risultano minori, consentendo inoltre, un funzionamento più silenzioso. Dalla figura a fianco, è possibile notare la curva iniziale (β=0°) che descrive l’andamento del 𝑃𝑚𝑒𝑐 fattore di potenza 𝐶𝑝 = 1 𝜌𝐴𝑈 3 in funzione 𝑐𝑡𝑔𝜑 = 2 𝑉𝑥 𝑈 = 𝜆 e che rappresenta il funzionamento della turbina che vorremmo sempre mantenere; sono poi presenti altre curve che rappresentano l’andamento del fattore di potenza all’aumentare di β ed inoltre, si evince l’abbassamento del massimo dell’andamento al diminuire di 𝜆 (aumenta la velocità del vento). Oggigiorno, le turbine a velocità variabile presentano, di norma, una regolazione della coppia aerodinamica mediante il controllo del passo delle pale, realizzato con adatti attuatori elettrici. La potenza eolica dipende dal cubo della velocità del vento; la potenza elettrica per le applicazioni fotovoltaiche dipende in maniera lineare dall’irradianza. Per massimizzare l’efficienza, bisogna inseguire la massima con le variazioni della velocità del vento (luogo dei punti è cubico): soltanto il controllo a velocità variabile consente di conseguire questo obiettivo. Si evidenzia oltre 9 m/s un funzionamento a velocità del rotore costante che abbandona il luogo dei punti a potenza massima fino a raggiungere la potenza nominale che si mantiene con la stessa velocità 𝜔. Questa velocità è associata al limite di forza centrifuga, la quale è proporzionale al quadrato di 𝜔 e alla lunghezza della pala R. STRUTTURA MOLTIPLICATORE DI GIRI Esso è probabilmente l’elemento più sensibile in un generatore eolico poiché deve sopportare delle sollecitazioni meccaniche; è inoltre costituito da più stadi (1:2,1:3,1:5) e permette di mantenere il rendimento di conversione elevato alle varie velocità del vento. Al fine di mantenere l’efficienza elevata, i rapporti di moltiplicazione non sono elevatissimi. Aspetti elettrici dell’energia eolica STRUTTURA MACCHINA ASINCRONA Una macchina elettrica presenta un cilindro cavo esterno che prende il nome di statore ed un rotore interno. Le macchine elettriche in corrente alternata sono realizzate con un avvolgimento trifase di tipo distribuito e ciascuna fase occupa un angolo di 60° per la corrente di andata e di 60° per quella di ritorno; nella fattispecie, l’avvolgimento di statore è alimentato in corrente alternata e ,grazie alla disposizione delle coppie polari, la corrente genera un campo magnetico rotante(campo di statore) nello spazio con la 𝛺 medesima frequenza della corrente dell’avvolgimento e alla velocità 0⁄𝑝, dove p è il numero di coppie polari. Questa produzione avviene grazie alla forza magnetomotrice totale mediante la riluttanza magnetica del traferro. NB: il flusso magnetico concatenato permette lo scambio di potenza mediante il traferro tra gli avvolgimenti di rotore e statore. L’avvolgimento di rotore, anch’esso trifase generalmente, è immerso nel campo magnetico rotante e quest’ultimo genera in esso una f.e.m. indotta e una coppia elettromeccanica (costante nel tempo in un sistema trifase simmetrico equilibrato). La f.e.m. dipende dalla differenza tra la velocità del campo magnetico rotante e la velocità del rotore ed in particolare risulta massima(così come la corrente di rotore), quando il rotore parte da fermo . Definiamo a questo punto un parametro importante, ovvero lo scorrimento 𝑠 = 𝑛𝑠 −𝑛𝑟 , 𝑛𝑠 dove 𝑛𝑠 è la velocità del campo magnetico rotante, definita anche velocità di sincronismo, e 𝑛𝑟 è la velocità del rotore; a seconda del valore di s definiamo 2 condizioni di funzionamento: - S>0 il rotore è sotto il sincronismo poiché la velocità di quest’ultimo è minore di quella del campo magnetico rotante, il funzionamento è da motore e la coppia è motrice; S<0 la velocità del rotore è maggiore di quella di sincronismo→ la coppia è frenante e definiamo questo funzionamento super-sincrono (funzionamento da generatore); S=0 funzionamento al sincronismo. È possibile disegnare un circuito equivalente per la macchina asincrona , in cui è possibile mettere in evidenza vari meccanismi di perdita e di non idealità: ➢ Perdite joule nel rame degli avvolgimenti di statore e rotore, che vengono modellizzate attraverso delle resistenze serie con quella di rotore riportata a statore; ➢ Flussi dispersi a statore e rotore rappresentati attraverso la serie di una reattanza induttiva, con quella di rotore riportata a statore; ➢ Perdite nel nucleo per isteresi e correnti parassite, modellizzate attraverso una resistenza in parallelo; ➢ Corrente di magnetizzazione rilevante legata al flusso concatenato tra statore e rotore, rappresentata mediante una reattanza di magnetizzazione in parallelo. Per semplicità possiamo non considerare i parametri paralleli. Di conseguenza la corrente di rotore vale: 𝐼𝑟′̅ = 𝑧̅ ̅𝑡ℎ 𝑉 ′ )⁄𝑠+𝑗𝑋 ′ +(𝑅 𝑡ℎ 𝑟 𝑑𝑟 dove i parametri con pedice “th” non sono altro che il frutto dell’equivalente Thevenin del circuito a sinistra della sezione A-A’; la potenza al traferro, ossia quella scambiata tra rotore e statore vale: 𝑃𝑔𝑎𝑝 = 3 𝑅′ 𝑟 ′ 2 𝐼𝑟 𝑠 ; la potenza meccanica vale 𝑃𝑚𝑒𝑐 = 3 2 1−𝑠 ′ ′ 2 𝑅 𝑟𝐼 𝑟; 𝑠 le pedite joule di rotore e 2 statore valgono rispettivamente: 𝑃𝑗𝑟 = 3𝑅′ 𝑟 𝐼 ′ 𝑟 e 𝑃𝑗𝑠 = 3𝑅𝑠 𝐼 ′ 𝑟 . Di conseguenza il rendimento, che è il rapporto tra energia elettrica e meccanica vale : 𝜂 = 𝑃𝑚𝑒𝑐 −𝑃𝑗𝑠 −𝑃𝑗𝑟 −𝑃𝐹 𝑃𝑚𝑒𝑐 , dove PF sono le perdite a vuoto. SOLUZIONE PER TURBINE A VELOCITÀ VARIABILE Nei sistemi a velocità variabile, che sono anche quelli più efficienti, per far sì che il rendimento resti sul valore massimo al variare della velocità del vento, bisogna disaccoppiare il generatore elettrico dalla rete a frequenza costante. A valle del generatore elettrico, si inserisce un convertitore elettronico bidirezionale (BEC) che è costituito da un raddrizzatore (AC/DC), per stabilizzare e raddrizzare la tensione generata a frequenza variabile , un inverter per produrre tensione AC a frequenza costante, una batteria di condensatori ed un bus in continua di collegamento. Una turbina che funzioni a velocità variabile è, per cui ,costituita da un trasformatore per connetterla alla rete (T3) , il generatore asincrono a doppia alimentazione (DFIG), il convertitore (BEC) ed un filtro LC. Grazie alla presenza del convertitore è possibile il funzionamento da generatore sia con s<0 , sia con s>0. Consideriamo prima il caso con s<0. La potenza meccanica imposta al rotore viene convertita in potenza elettrica; quest’ultima segue 2 strade: una parte è la potenza di statore ed un’altra parte è quella di rotore. La potenza di statore ha una pulsazione che è quella della rete ed inoltre essa non è altro che la potenza al traferro e viene inviata alla rete(rappresenta la quota maggiore di potenza trasferita); la potenza di rotore ha invece una pulsazione che dipende dalla velocità del rotore che è variabile. A tal proposito, questa quota di potenza viene assorbita dal convertitore che dapprima trasforma la potenza in continua (attraverso il raddrizzatore) e poi la trasforma in potenza in alternata (mediante l’inverter). NB: la direzione della freccia gialla in questo caso è verso destra. Nel caso di s>0 una quota di potenza può essere prelevata dalla rete e, mediante una doppia conversione, trasferita al rotore; in questo caso la freccia gialla ha i verso rivolto a sinistra( situazione opposta a quella precedente). Se vogliamo studiare una turbina di questo tipo, bisogna pensare al convertitore come una resistenza apparente che dipende dallo scorrimento. Consideriamo prima il caso supersincrono con s<0. la potenza meccanica, affinchè la macchina asincrona lavori da generatore deve essere negativa→ 𝑃𝑚𝑒𝑐 = 3 1−𝑠 (𝑅 ′ ′𝑟 𝑠 2 + 𝑅 ′ 𝑎𝑝𝑝 )𝐼′ 𝑟 , di conseguenza, essendo s<0, la resistenza apparente deve essere maggiore di 0. Nella figura a fianco sono presenti 2 curve che rappresentano l’andamento della coppia elettromeccanica in funzione della velocità del rotore con o senza convertitore. Per quanto riguarda la potenza, sono presenti 3 rettangoli a colori diversi che individuano altrettante potenze: la potenza al traferro (in azzuro), le perdite joule di rotore (in giallo), corrispondenti a uno scorrimento s = -1 %, pari a quello nominale) sulla curva con R’app = 0, e (in verde) la PCEB ossia la quota di potenza recuperata grazie al convertitore, che nel nostro caso corrisponde ad un s=-5%. Se il valore della resistenza apparente aumenta, aumenta anche la quota di potenza recuperata, più invece è bassa più la pendenza della curva tenderà a 2 quella del caso senza convertitore. Ricordiamo le perdite joule di statore e rotore valgono 𝑃𝑗𝑟 = 3𝑅′ 𝑟 𝐼 ′ 𝑟 e 2 2 𝑃𝑗𝑠 = 3𝑅𝑠 𝐼 ′ 𝑟 . La potenza del convertitore può essere calcolata come 𝑃𝐵𝐸𝐶 = 3𝑅 ′ 𝑎𝑝𝑝 𝐼′ 𝑟 , ma è legata alla potenza meccanica, alla potenza al traferro e alla perdite joule di rotore dalla relazione: 𝑃𝐵𝐸𝐶 = |𝑃𝑚𝑒𝑐 | − |𝑃𝑔𝑎𝑝 | − 𝑃𝑗𝑟 . Lo scorrimento può valere fino a -30% e l’efficienza è alta grazie alle basse perdite di conversione. Consideriamo il caso subsincrono con s>0, affinchè la potenza meccanica e la potenza al traferro siano negative la resistenza apparente deve essere negativa ed inoltre, in valore assoluto, deve essere maggiore della resistenza di rotore. È necessaria una precisazione: la potenza PBEC, che l’inverter lato rotore deve fornire, è pari alla somma dei due rettangoli verde e arancione, cioè serve a compensare sia la quota mancante della potenza al traferro (la parte in aggiunta alla potenza meccanica) sia le perdite nel rame di rotore. La formula da usare è sempre la stessa, soltanto che si ottiene un valore negativo di PBEC, coerentemente col fatto che essa deve essere prelevata dalla rete. Anche in questo caso, la 2 quota di potenza 𝑃𝐵𝐸𝐶 = 3𝑅 ′ 𝑎𝑝𝑝 𝐼′ 𝑟 è proprio la PCEB. Ma la potenza, effettivamente prelevata dalla rete, è maggiore a causa delle perdite nel convertitore elettronico (conduzione, commutazione). In questo altro caso, il valore dello scorrimento può essere esteso fino al +30%. NB: In conclusione, l’uso del convertitore elettronico permette di estendere notevolmente il campo di velocità del rotore del DFIG, mantenendo tuttavia valori elevati del rendimento di conversione, perché le perdite nel rame di rotore e di statore, a parità di coppia, non crescono, a differenza della macchina asincrona tradizionale. Sempre in riferimento alla turbina a velocità variabile, prendiamo in considerazione la dipendenza della potenza meccanica delle pale e della velocità del generatore dalla velocità del vento, poiché queste sono le caratteristiche più importanti in una turbina. Quest’ultima entra in funzionamento a 4 m/s (cut-in) ed esce dal funzionamento a 25 m/s (cut-off). Inizialmente il funzionamento avviene a velocità costante, solo successivamente la velocità del rotore cresce linearmente con derivata 𝜔𝑟 costante ⁄𝑈 = 𝑐𝑜𝑠𝑡., fino al limite centrifugo; questo tratto è inoltre quello a potenza massima, tanto è vero che, essa cresce col cubo della velocità del vento, mentre inizialmente la sua crescita è più lineare; dopo il limite centrifugo anche la potenza non cresce più col cubo di 𝜔𝑟 fino a quando diventa costante al suo valore nominale , punto in corrispondenza del quale si ha il momento flettente. Per quanto riguarda lo scorrimento esso è inizialmente positivo , per poi diventare negativo in corrispondenza di una velocità del rotore di circa 1500 rpm. Va detto che il limite centrifugo si ha in corrispondenza di una velocità del vento di circa 9 m/s e fino a questo punto la regolazione avviene al 𝜆 ottimale, invece dopo la regolazione aerodinamica diventa dissipativa e l’angolo β diviene via via più grande→ la pala da frontale rispetto al vento, viene messa di profilo (verso il funzionamento da bandiera) così da ridurre α e le eventuali sollecitazioni meccaniche. Il tasso di crescita di β, come si evince dallo schema sulla destra, condiziona anche il modo in cui viene raggiunto il valore di potenza nominale; infatti con un gradiente rilevante (rumoroso) la regolazione è più dissipativa e si limita la potenza prodotta, mentre con un incremento più morbido si ha meno rumore acustico. Dalla figura a sinistra è invece possibile constatre che la regolazione del BEC per mezzo della resistenza apparente permette di ottenere la potenza elettrica desiderata (ossia la curva “potenza elettrica/velocità del vento”) in una turbina da 850 KW. È possibile apprezzare ′ che quando s>0 → 𝑅𝑎𝑝𝑝 <0, viceversa se ′ s<0→ 𝑅𝑎𝑝𝑝 >0. In corrispondenza del punto in cui lo scorrimento e la resistenza apparente cambiano di segno anche la potenza del convertitore BEC cambia segno, poiché con lo scorrimento positivo la potenza viene prelevata dalla rete, viceversa, viene ceduta a quest’ultima. Caratterizzazione della risorsa eolica Una massa d’aria, con densità 𝜌 = 1,225 kg/m3 (a livello del mare e a 15°C), una velocità U (m/s) attraverso 𝑃 1 una sezione di area A (m2) ed ha una densità di potenza che è 𝐴 = 2 𝜌𝑈 3 che può essere espressa anche in funzione della portata massica(ovvero della derivata della massa nel tempo), ricordando che è uguale a 𝜌𝑈𝐴. Dunque, la densità di potenza è direttamente proporzionale al cubo della velocità e nello specifico, per velocità di 8-10 m/s , la densità di potenza è compresa tra 300-600 W/m2 , con 20 m/s, ossia una velocità che viene raggiunta di rado, la densità di potenza arriva a valere 5 kW/m2. La densità dell’aria è funzione della temperature T e della pressione B; essa infatti decresce all’aumentare della quota (1,11-1,12 kg/m3 a 1200-1300 m di altitudine)→ 𝜌 = 𝐵 , 𝑅0 𝑇 dove 𝑅0 = 287,05 𝐽/(𝑘𝑔 𝐾) è la costante del gas dell’aria secca. ASPETTI ANEMOMETRICI Per lo studio del vento è importante l’utilizzo di particolari sensori che permettano il calcolo della velocità (anemometro a coppa) e della direzione (banderuola) del medesimo. In genere questi sensori sono installati almeno a 10 m di altezza e fino a 20 m poiché si deve cercare di evitare la rugosità del suolo che va ad influire sulla turbolenza dell’aria; il terreno migliora sarebbe un suolo ghiacciato. L’anemometro è un sensore ma non un generatore, infatti esso è molto sensibile anche a velocità piuttosto basse, ma ha uno scarso rendimento di conversione poiché si basa sul drag. I dati sono raccolti nell’arco di un anno, con frequenza di campionamento di una misurazione al minuto, e memorizzati statisticamente ogni 10 minuti. I valori da che vengono presi in considerazione sono: • Valor medio; • Deviazione standard: è un valore di tipo RMS ossia è una radice quadrata del valor medio dei quadrati degli scarti che possiamo scrivere come √∑600 𝑘 ̅ 𝑈𝐾 −𝑈 , (600−1) ̅è dove 𝑈𝐾 è lo scarto generico, 𝑈 il valor medio, mentre la sommatoria arriva fino a 600 poiché abbiamo un campionamento al secondo per 10 minuti; • Valore massimo; • Valore minimo. L’intensità della turbolenza è il rapporto “deviazione standard/valor medio” e nella figura, che rappresenta la rosa dei venti le direzioni principali sono NE e SW. Una volta misurati i dati sperimentali, essi devono essere riportati all’altezza del mozzo che può, come sappiamo, raggiungere i 100 m. Oltre all’altezza è fondamentale tenere presente un altro parametro che è la rugosità Z0, che assume valori bassi per superficie piane, come per esempio il mare. Nella figura a fianco è possibile visualizzare l’andamento della velocità del vento in funzione dell’altezza e della rugosità. Nella formula, 𝑢𝑟𝑒𝑓 è la velocità all’altezza dell’anemometro, mentre ℎ𝑟𝑒𝑓 è l’altezza dell’anemometro. La velocità solitamente è superiore a quella che si ha all’altezza dell’anemometro, ed infatti cresce con l’altezza; un valore più basso di rugosità fa sì che essa diminuisca. Per misurare direttamente il profilo di velocità del vento con l’altezza, si usano 2 tecniche di telerilevamento LIDAR ( light detection and ranging o radar di tipo laser) o SODAR ( sound detection and ranging o radar di tipo acustico) che però sono meno precise rispetto alle misurazioni effettuate con l’anemometro. Entrambe le tecniche si basano sull’ effetto Doppler per rilevare il flusso d’aria nello strato limite atmosferico e dedurre la velocità e la direzione del vento. Il LIDAR, che è più preciso del SODAR, fa sì che un raggio laser venga riflesso dall’aerosol in movimento col flusso d’aria, mentre col SODAR viene riflesso un flusso sonoro. Queste 2 tecniche permettono di avere un sistema GIS per quanto riguarda le caratteristiche del vento in base a quelle del terreno. Passando all'analisi statistica dei dati, bisogna calcolare, per una data direzione del vento, il numero di ore in cui la velocità del vento è compresa in un intervallo prefissato, raggruppando i dati in un classi di velocità (BIN) di ampiezza 0,5-1 m/s. i dati sono presentati nell’istogramma delle frequenze per calcolare il valor medio e la deviazione standard. A tal proposito, data l’asimmetria della distribuzione, la scelta migliore è la distribuzione di Weibull , che ricorda la gaussiana e si contraddistingue per 2 parametri, il fattore di forma k e il fattore di scala c. Oltre al valor medio, altri due parametri importanti presenti all’interno della figura sono, la moda, ossia il valore che statisticamente è più presente( ha densità di probabilità maggiore) e la mediana, che corrisponde a quel valore di velocità del vento che divide la distribuzione in 2 parti di uguale area. Nella figura a fianco, oltre alla distribuzione di Weibull, è rappresentata la cumulativa che definisce la probabilità vera e propria. Nello specifico, sono presentate due distribuzioni di Weibull, una con k=2 dove abbiamo la distribuzione di Rayleigh che assomiglia molto alla gaussiana, mentre l’altra con un fattore di scala c maggiore che presenta una velocità media superiore, proprio per tale motivo. La moda corrisponde al valore di pendenza massima della cumulativa ed inoltre, da quest’ultima è possibile, derivando, ottenere la distribuzione di weibull. NB: l’analisi statistica è necessaria poiché l’efficienza delle turbine eoliche è fortemente dipendente dalle variazioni di velocità, risultando massima e circa costante solo tra 4 e 9 m/s. Questa è un importante differenza rispetto ai generatori fotovoltaici, laddove al variare dell’irradianza, l’efficienza resta costate. CALCOLO DELLA PRODUZIONE ENERGETICA In questo frangente ci riferiamo alla producibilità di una singola turbina e risulta la sommatoria dei prodotti , per una velocità del vento all’altezza del mozzo, della curva “potenza elettrica/velocità del vento”, fornita dal costruttore, e della distribuzione delle frequenze del vento (sperimentale o la Weibull). Se ad esempio si considera una turbina da 850 KW, che produce 765 MWh/anno, posso calcolare la resa finale (final yield) come rapporto tra l’energia annuale e la potenza elettrica nominale : 𝑌𝑓 = 𝐸𝑎𝑛𝑛𝑜 𝑃𝑒𝑙 = 765(𝑀𝑊ℎ/𝑎𝑛𝑛𝑜) 850(𝑘𝑊) ≈ 900 ℎ/𝑎𝑛𝑛𝑜; da questo valore posso ricavare il capacity factor come il 𝑌𝑓 rapporto tra la resa finale e il numero di ore dell’anno→ 𝐶𝐹 = 8760 100 = 10%(nel nostro caso). Va detto che un capacity factor del 10% è abbastanza scarso , infatti il sito lavora meno di 1000 ore all’ano. Un buon sito eolico on-shore deve avere un CF almeno del 20%, mentre un impianto off-shore si aggira intorno al 3040% con pichi del 50%. Aspetti energetici ed economici dell’energia eolica Nel paragrafo precedente abbiamo analizzato il caso della producibilità della singola turbina, tuttavia, la maggior parte degli impianti fotovoltaici e delle centrali eoliche sono costituite da più turbine(più pale eoliche). In questo tipo di impianti la produzione reale risulta ridotta se comparata al caso della singola turbina a causa di fenomeni dissipativi, come l’effetto scia che perturbano il vento non consentendo un’efficienza ottimale. Per quanto riguarda gli schemi di funzionamento delle turbine eoliche abbiamo due possibili soluzioni: 1) Schema a velocità fissa: in questo tipo di di configurazione le turbine sono dotate di moltiplicatore di giri(gerabox) generatore asincrono (IG) e trasformatore trifase che le connette alla rete. Questo tipo di turbine è indicata per siti ventosi ed è sicuramente la tecnologia eolica che per prima si è sviluppata, soprattuto in Danimarca e Olanda, per ciò che concerne l’Europa; sono possibili rendimenti elevati solo in prossimità della velocità nominale, con scorrimenti dell’ordine dell’1-2%. Tuttavia, sono possibili anche scorrimenti più elevati fino al 10% ma per tempi limitati, per ridurre le sollecitazioni meccaniche in caso di forte raffiche di vento(wind gust). 2) Schema a velocità variabile: in questo caso, non necessariamente bisogna usare un generatore ad induzione (asincrono) ed inoltre, questa tecnologia è particolarmente adatta per siti con velocità del vento moderata. Si possono avere 2 varianti, a seconda del tipo di generatore e del convertitore elettronico di potenza presente. Nella figura a fianco, abbiamo la soluzione con generatore sincrono a magneti permanente, che viene indicato dalla sigla PMSG(permanent magnet synchronous generator), convertitore elettronico FSPC(full scale power converte) e trasformatore trifase per connetterlo alla rete; il convertitore è necessario ed esso consta di un raddrizzatore, che trasforma la tensione in alternata a frequenza variabili in tensione DC, e di un inverter che invece trasforma la tensione in tensione DC in tensione in alternata a frequenza costante, ossia alla frequenza di rete. In questo caso il convertitore è dimensionato per tutta la potenza che deve essere trasferita alla rete, al contrario del caso della seconda variante di questo tipo di tecnologia, ovvero il DFIG. Quest’ultimo si basa su un generatore ad induzione e su un convertitore bidirezionale partial-scale, ovvero dimensionato per trasferire solo una parte di potenza alla rete, ovvero la potenza di rotore (pari al 30% del caso precedente). Questa seconda soluzione inoltre, a differenza della prima, necessita di un gearbox ( moltiplicatore di giri). La turbina con PMSG e FSPC si definisce direct drive proprio per tale ragione. NB: a prescindere dal tipo di soluzione impiegata, le turbine a velocità variabile possono lavorare con scorrimenti che arrivano a ±30% ed inoltre permettono di ottenere rendimenti elevati con velocità medio-basse (4-9 m/s) e per questo, sono indicate per quei siti non molto ventosi, tipici ad esempio delle regioni italiane. COSTI Per quanto riguarda i costi essi si aggirano tra 1200-3000€/KW e nello specifico il costo più basso si riferisce ad impianti e quindi centrali, dell’ordine del MW di potenza, mentre il prezzo più alto a soluzioni dell’ordine del centinaio di KW. Tuttavia, nell’ambito della micro-eolica i costi possono ulteriormente lievitare. Il costo dell’elettricità è invece 3-15c€/KWh e ciò vuol dire che nei siti più favorevoli la resa dell’eolico è superiore a quella del fotovoltaico. A fianco abbiamo un confronto a testimonianza di quanto appena asserito. Al 2015 nel mondo risultano installati circa 63 GW di potenza derivante dall’eolico, con ben 5 paesi che superano i 20000MW prodotti: Cina(145,362MW), USA(74 MW),Germania (44MW),India(25 MW) e Spagna (23 MW). NB: esistono dei siti specializzati per la stima della produzione energetica in vari siti di interesse. SCELTA DELLE TURBINE E LORO DISTANZA Nella progettazione di un impianto fotovoltaico il primo parametro da tenere in considerazione è il tipo di turbina eolica per quel determinato sito, tant’è vero che un’adeguata scelta del tipo di turbina, in base alle caratteristiche del sito, può migliorare anche del 15% la producibilità dell’impianto. In seconda battuta, se vengono installate più turbine è importante valutare la corretta distanza tra un rotore eolico ed un altro, al fine da scongiurare l’effetto scia (wake). Come sappiamo dal trinomio di Bernoulli, la presenza di un rotore crea una sorta di imbuto e , sia prima sia dopo il rotore, la velocità del vento risulta minore e per ritornare al proprio valore imperturbato iniziale è necessario essere ad una certa distanza dalla turbina. La scia 𝐹𝑇 2 𝑧 𝐴𝑠𝑤 𝑈ℎ dipende dal coefficiente di spinta (thrust) CT: 𝐶𝑇 = 0,5𝜌 𝑟 , 𝑟𝑥 = 𝑟0 + 𝛼𝑥, 𝑈𝑥 = 𝑈0 + 𝑈0 (√1 − 𝐶𝑇 − 2 1) (𝑟0 ) , dove quest’ultima formula esprime la velocità della scia alla distanza x dalla turbina sopravento. 𝑥 Definisco le principali grandezze presenti nelle formule: 𝑈0 è la veloctà del vento sulla turbina eolica sopravento; 𝑟𝑥 è il raggio della corrente d’aria a distanza x; 𝑟0 raggio del rotore; 𝛼 è un coefficiente scalare che indica quanto velocemente si espande la scia ed in genere 𝛼 = 0.075 per impianti onshore e 𝛼 = 0.04 − 0.05 per impianti offshore. Approssimativamente la scia può essere vista come un cono. Ad esempio, nella figura abbiamo una piccola isola con 4 turbine e le relative scie quando sono investite dal vento proveniente da sud-est ed è possibile notare che l’effetto scia provoca delle perdite di circa il 5% con CF=31%, che ricordiamo essere il capacity factor ovvero la percentuale delle ore dell’anno per le quali la turbina produce potenza nominale. ASPETTI RELATIVI ALLA DISPONIBILITÀ Quelli appena analizzati sono aspetti che vanno a comporre il punto di vista del progettista, tuttavia, è importante andare ad analizzare anche aspetti legati alla disponibilità della risorsa che limitano la produzione. A tal proposito, bisogna considerare che le turbine sono soggette a guasti che le mandano fuori-servizio. Si definisce frequenza di guasto (failure) ,che rappresenta il numero di guasti per turbina e per anno, e la sua ripartizione per componente e per categoria di costo del guasto. Per le turbine a velocità fissa, le frequenze di guasto più elevate sono per i componenti dell’azionamento meccanico (gearbox, pale); per le turbine a velocità variabile, le frequenze di guasto dell’azionamento elettrico sono minori , ma la frequenza di guasto dei componenti elettrici e del controllo( regolazioni del passo e sensori) sono elevate. Possiamo definire il tempo utile Tu come il tempo in cui la velocità del vento è compresa tra 4 m/s (cut-in) e 25 m/s (cut-off); con Tf indichiamo il tempo di fuoriservizio, per cui la durata di produzione effettiva è 𝑇𝑒 = 𝑇 𝑇𝑢 − 𝑇𝑓 . L’indicatore di disponibilità su base temporale è 𝐴 𝑇 = 𝑇𝑒 . Quest’ultimo per una wind farm in un 𝑢 terreno ideale è >95%, tuttavia, in caso di terreno complesso ( terreno dalla morfologia complessa, tipicamente non spianata e caratterizzato dalla presenza di piante ed edifici alti) può essere inferiore fino al 70%. NB: durante il funzionamento, le turbine presentano potenze differenti, l’una dall’altra, per la stessa velocità del vento. Inoltre, va detto che le potenze prodotte in condizioni reali sono più basse di quelle in presenza di turbolenza. In ambito progettuale è importante fare una stima della velocità del vento. A tal proposito, ci vengono in aiuto gli anemometri montati sulle turbine, tuttavia, essi sono montati sul retro della navicella della turbina e, per questo motivo, essi rilevano le velocità dopo che la corrente d’aria ha attraversato le pale. Bisogna per cui stimare la velocità in ingresso 𝑈ℎ𝐼𝑁 in funzione di quella in uscita 𝑈ℎ𝑂𝑈𝑇 poiché è necessario confrontare il valore ottenuto con la curva di potenza del costruttore. Il metodo usato per la stima è basato sulla procedura di taratura degli strumenti. Dopo la correzione dei dati, si compara il comportamento reale sul campo con la curva di potenza del costruttore; in un terreno complesso si stima una riduzione nella prestazione della wind farm del 25-35%. Anche il CF diminuisce, a volte anche al di sotto del 15%, che è un valore scarso poiché teoricamente potrebbe valere anche più del 20%. TAGLIO DELLA PRODUZIONE DI ENERGIA EOLICA Un compito dei TSO (Transmission System Operators) e DSO (Distribution System Operators) è quello di gestire la rete in presenza di fluttuazioni di frequenza e tensione , conseguenti alla produzione intermittente delle wind farms. Le variazioni di frequenza dipendono dal bilancio istantaneo tra le potenze attive generate e quelle assorbite a livello dell’alta tensione. L’intermittenza del vento impone dei vincoli ai TSO :un caso tipico accade quando la sommatoria delle potenze attive generate supera la sommatoria delle potenze attive assorbite (sovra-frequenza). In Cina ,alcune volte, il TSO preferisce tagliare l’energia eolica piuttosto che spegnere le centrali elettriche a carbone. Questo taglio arriva al -10% della produzione annua. È più semplice disinserire le centrali eoliche, a differenza di quelle termoelettriche, poiché quest’ultime prevedono dei tempi di accensioni più lunghi ed altre implicazioni economiche. TAGLIE DI POTENZA, DIFFUSIONE DEGLI IMPIANTI Le taglie tipiche sono 660-850 kW, 1-6 MW con tensione del generatore di 690 V, che viene elevata mediante trasformatore a 20 kV. Gli impianti si possono dividere in stand-alone e smart-grid. Il settore è in forte crescita ed annualmente fa registrare un più 20% con la Germania e la Spagna, in Europa, che fanno da capofila per quantità di energia elettrica prodotta.