caricato da
common.user9081
Macchine Elettriche CC: Motori e Generatori

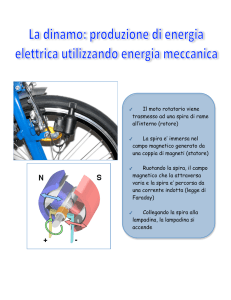
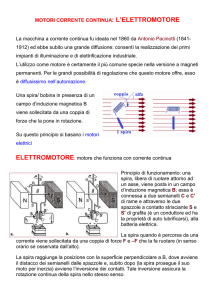
Macchine elettriche in corrente continua Generalità Può essere definita macchina un dispositivo che converta energia da una forma a un’altra. Le macchine elettriche in particolare convertono energia elettrica in energia meccanica e viceversa. In particolare vengono definiti MOTORI ELETTRICI le macchine che convertono energia elettrica in energia meccanica: I dispositivi che invece convertono energia meccanica in energia elettrica vengono detti GENERATORI: Energia Elettrica Energia Meccanica MOTORI A seconda che le macchine elettriche abbiano parti mobili o meno si ha una suddivisione in: • Macchine elettriche rotanti • Macchine elettriche statiche Energia Meccanica GENERATORI Energia Elettrica Delle ultime fanno parte i TRASFORMATORI, che hanno la funzione di modificare l’ampiezza di tensione e corrente. Un’ulteriore classificazione delle macchine elettriche sia ha in base alla forma dell’energia elettrica utilizzata: si avranno quindi • Macchine in corrente continua • Macchine elettriche in corrente alternata Le macchine elettriche hanno la particolarità di essere reversibili, cioè una stessa macchina può funzionare sia da motore che da generatore. I generatori in corrente continua vengono detti DINAMO, quelli in corrente alternata ALTERNATORI 1 Il Motore In Corrente Continua Costituzione È una macchina elettrica rotante in corrente continua che converte energia elettrica in energia meccanica. È costituita principalmente da uno STATORE, che è la parte fissa della macchina e ha il compito di produrre il FLUSSO MAGNETICO necessario al suo funzionamento. È realizzato in materiale ferromagnetico (ferro, ghisa, acciaio), ed è dotato di opportune ESPANSIONI POLARI ove viene prodotto il campo magnetico. Lo statore ha la forma di un cilindro cavo ed è fornito di un basamento o di piedi che lo fissano a terra. B N S ESPANSIONI POLARI Le macchine elettriche possono possedere anche più coppie polari. Macchine di piccola potenza producono il flusso magnetico mediante magneti permanenti posizionati in corrispondenza delle espansioni polari. Per macchine di potenza superiore invece il flusso magnetico viene generato mediante una corrente di eccitazione che percorre appositi avvolgimenti detti appunto AVVOLGIMENTI DI ECCITAZIONE, posizionati intorno alle espansioni polari. 2 Il ROTORE è costituito da un cilindro di materiale ferromagnetico posizionato all’interno dello statore, ed è libero di ruotare intorno al proprio asse. Sul rotore sono allocati, in apposite cave gli avvolgimenti di armatura, detti anche avvolgimento di indotto, ai capi dei quali, con rotore in movimento, si genera una forza elettromotrice. La parte in aria tra statore e rotore viene definita TRAFERRO, in questa zona il campo magnetico ha la maggiore intensità. Montato sullo stesso albero del rotore si ha il COLLETTORE. Questo ha lo scopo di fornire agli avvolgimenti la tensione di alimentazione e fare si che la coppia generata dalla corrente che il attraversa sia costante o quantomeno unidirezionale. Il collettore è costituito da lamelle in rame, disposte a formare un cilindro, in collegamento elettrico con i conduttori che costituiscono gli avvolgimenti di armatura. Le lamelle sono isolate tra loro mediante un dielettrico, solitamente mica. Le spazzole strisciano sul collettore sul collettore e lo collegano elettricamente ai terminali esterni della macchina. Sono realizzate in materiale conduttore più tenero del collettore, solitamente grafite, in modo che col tempo siano queste ad usurarsi in quanto la loro sostituzione risulta più semplice ed economica che un intervento sul collettore. 3 Data la presenza di parti in contatto diretto il sistema spazzole-collettore è la parte più delicata della machina. Nella figura seguente è rappresentato lo schema completo di una macchina in corrente continua. 4 Circuito magnetico di statore Il numero di coppie polari viene definito con la lettera p. Quindi una macchina con una coppia polare avrà due poli, con due coppie polari quattro poli ecc. L’asse neutro individua il piano che taglia longitudinalmente la macchina e in cui si ha induzione magnetica nulla. Viene detta passo polare τ la distanza angolare tra i poli della macchina 360° τ= 2⋅ p L’andamento dell’induzione al traferro per le due macchine è rappresentato nelle figure seguenti, dove si assume di percorrerlo in senso orario a partire dal punto O. Si considera positiva l’induzione entrante nel rotore, negativa quella uscente. Si può osservare come, in corrispondenza delle espansioni polari, l’induzione magnetica B si possa considerare costante 5 Sistema spazzole collettore Per comprendere il funzionamento del motore è bene partire dalla forza di Lorentz. Un conduttore immerso in un campo magnetico B, e percorso da una corrente I é sottoposto ad una forza F = B ⋅l ⋅ I dove B è l’induzione magnetica l è la lunghezza del conduttore I è la corrente Il verso della forza di determina attraverso la regola della mano sinistra. se al posto del conduttore rettilineo si considera una spira, sui suoi lati opposti agiranno due forze uguali ed opposte che daranno luogo ad una coppia. 6 PROBLEMA Supponendo la corrente entrante dal lato destro della spira, e quindi uscente dal quello sinistro, sulla spira in esempio agirà una coppia di forze tale da farla ruotare in senso orario. quando la spira si trova a 90°, alle due forze F non corrisponde più alcuna coppia in quanto agiscono sulla stessa retta ( non c'è braccio). Al massimo la spira continua a ruotare per inerzia Se la spira supera i 90° addirittura si ha una coppia che tende a farla ruotare in direzione opposta. ( la forza agente sul singolo conduttore (F) è stata scomposta in due direzioni: una tende a "dilatare" la spira (Fd) e l'altra a farla ruotare (Fr) 7 Soluzione: Anello di Pacinotti Anziché alimentare le la spira in maniera statica, cioè con la corrente che entra sempre con lo stesso verso su un lato della spira. Pacinotti elabora un alimentazione mediante un anello diviso in due metà, ai capi delle quali arriva la tensione di alimentazione, e dei contatti striscianti collegati alla spira. i colori blu e rosso rappresentano uno stesso lato della spira Anello Contatto Strisciante Come si può notare nella spira disegnata a destra dopo mezzo giro, sui suoi lati agiscono forze tali da mantenere costante la direzione di rotazione. In sintesi si può notare come dopo una rotazione di 180° la coppia agente sulla spira sia concorde con quella iniziale a questa base si ha l’evoluzione del motore in corrente continua: • Anziché una spira si usano degli avvolgimenti per ottenere coppie più elevate • Gli avvolgimenti sono solidali con il rotore • Si usano diversi avvolgimenti in modo da ottenere su ciascuno la coppia massima e ottenere una coppia pressochè costante sul rotore • L’alimentazione viene fornita ai contatti striscianti e non ai semianelli • Gli anelli vengono suddivisi in tanti settori (collettore) ognuno dei quali collegato ad un capo di un avvolgimento Collettore 8 Coppia nel motore in CC Le due forze nel disegno precedente danno luogo a una coppia C = F ⋅ 2r = B ⋅ l ⋅ I ⋅ 2 ⋅ r dove r è il raggio del rotore In definitiva si arriva all’espressione C = Ka ⋅ Φ ⋅ I dove : Ka è una costante che dipende dai parametri costruttivi della macchina (lunghezza, diametro, numero di poli, tipo di avvolgimenti ed altri) Φ è il flusso di eccitazione (costante nei motori a magneti permanenti) I è la corrente di armatura, ossia quella che percorre gli avvolgimenti di rotore Forza Elettromotrice indotta Quando il rotore è in movimento in conduttori sono sottoposti ad un flusso magnetico che varia nel tempo. In base alla legge di Faraday-Neumann-Lenz si genera ai loro capi una forza elettromotrice. Con una serie di passaggi si può giungere alla seguente espressione che permette di determinare la tensione ai capi degli avvolgimenti di rotore : E = Ke ⋅ Φ ⋅ ω dove: Ke è analoga a quanto detto precedentemente per Ka, hanno addirittura lo stesso valore se si trascurano le perdite nel ferro Φ è il flusso di eccitazione (costante nei motori a magneti permanenti) ω è la velocità angolare del rotore 9 Circuito Equivalente del Motore CC Nel circuito di destra è rappresentato il circuito equivalente del rotore di un motore in corrente continua. Il simbolo con la M indica appunto un motore in corrente continua, i due rettangoli simboleggiano le spazzole. Come detto in precedenza ai capi dell’avvolgimento di rotore, detto anche di armatura, si genera una f.e.m. indotta proporzionale alla velocità di rotazione del rotore stesso. La Ra rappresenta la resistenza associata agli avvolgimenti di armatura mentre la La è l’induttanza associata allo stesso avvolgimento (in generale ha influenza solo quando ci sono variazioni di corrente nel circuito, ad esempio all’avvio) Il circuito di sinistra rappresenta il circuito di eccitazione, cioè quello che ha il compito di produrre il flusso magnetico necessario al funzionamento del rotore. In questo caso si considera un motore con circuito di eccitazione indipendente. Re ed Le rappresentano rispettivamente la resistenza e l’induttanza degli avvolgimenti di statore. Quando il rotore viene alimentato con una tensione Va viene percorso da una corrente Ia. Applicando il 2° principio di Kirchhoff si ottiene: L’espressione della coppia (già vista): 10 mentre l’equazione di equilibrio meccanico è la seguente : Accelerazione angolare Dalle equazioni precedenti si può ricavare un modello matematico del motore utile per simularne il comportamento. Utilizzando solo le prime tre si può invece determinare la relazione tra la coppia prodotta dal motore e la sua velocità di rotazione. 11 Caratteristica coppia velocità Ipotizzando di essere a regime, cioè con tutte le grandezze elettriche e meccaniche costanti, le derivate delle equazioni 2) e 4) sono nulle Per determinare la relazione tra coppia e velocità si sostituisce l’equazione 1) nella 2) e si ottiene: 1 ) Va − K M ⋅ ω = R a ⋅ I a Ia = Va K M − ⋅ω Ra Ra Sostituendo l’espressione della corrente di armatura così ricavata nella 3) si ottiene: V K C = K M ⋅ a − M ⋅ ω Ra Ra 2 V K C = KM a − M ⋅ω Ra Ra La relazione tra Coppia e Velocità è l’equazione di una retta (y=mx+q dove y= C, x=ω , m=KM2/ Ra e q=KMVa/Ra ) Le intersezioni con gli assi si ottengono con ω=0 C = KM C=0 ω= Va Ra Va KM C KM Va Ra Va KM ω 12 Il punto di funzionamento del motore dipende dalla retta di carico data dalla coppia resistente Cr C KM Va Ra C ω* ω Va KM Si può notare come le intersezioni della caratteristica coppia-velocità dipendano entrambe da Va, quindi al variare di quest’ultima la retta trasli parallelamente a se stessa C Va ↑ KM Va Ra ω Va KM Si capisce quindi come, a parità di coppia resistente, si possa far variare la velocità di rotazione semplicemente agendo sulla tensione di armatura. ( Come ipotizzato in precedenza il flusso di eccitazione è costante) C Va ↑ Cr ω1 ω2 ω3 ω4 ω 13 dati di targa Potenza nominale Pn è la potenza meccanica sviluppata dal motore in condizioni nominali Corrente nominale In è la corrente assorbita dal motore in condizioni nominali Tensione nominale Vn è la tensione che si deve fornire al circuito di armatura. Velocità nominale nn è la velocità di rotazione del motore in condizioni di funzionamento nominali. Può essere espressa in giri al minuto (rpm in inglese) oppure come velocità angolare in rad/sec. Tra le due sussistono le seguenti relazioni: ω= 2π n 60 n= 60 ω 2π dove n indica i giri al minuto e ω la velocità angolare. Rendimento nominale ηn È il rendimento del motore in condizioni di funzionamento nominale. In funzione di questo è possibile calcolare la potenza elettrica assorbita nominale Pan = Pn ηn tipo di collegamento del circuito di eccitazione (indipendente, in serie, in derivazione) Classe di isolamento Grado di protezione (contro la penetrazione di solidi e liquidi) Tipo di servizio 14