caricato da
common.user1752
Mam1Cp1

Cap. 1 - STRUTTURA DELLE
MACCHINE
1.1 Oggetto dello studio
1.2 La macchina come sistema
1.3 Studio delle macchine
1.4 Coppie cinematiche
1.5 Catene cinematiche e meccanismi
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 1
1.1 - OGGETTO DELLO STUDIO
La Meccanica Applicata alle Macchine è il settore della
meccanica che studia le macchine.
Macchina può essere definita qualsiasi costruzione
dell’uomo il cui stato evolve nel tempo, atta al
raggiungimento di un prefissato ed utile obiettivo.
Solitamente si limita lo studio a quei sistemi, costruiti
dall’uomo, che siano caratterizzati da membri in moto
relativo rispetto al telaio.
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 2
Page 1
Le finalità dello studio e quindi le tecniche adottate
sono diverse a seconda dei punti di vista:
¾ produzione
¾ progettazione
•
•
•
•
di massima
di dettaglio
funzionale
strutturale
¾ gestione
¾ manutenzione
Classificazione delle macchine:
¾ energetiche
• motrici
• generatrici
¾ operatrici
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 3
MACCHINE ENERGETICHE
Sono destinate alla trasformazione di energia:
¾ motrici
–
–
–
–
energia termica → energia meccanica
energia elettrica → energia meccanica
energia potenziale → energia meccanica
...
¾ generatrici
– energia meccanica → energia elettrica
– energia meccanica → energia termica
– ...
Le macchine energetiche sono anche classificate a seconda
della fisica del fenomeno di trasformazione energetica:
¾ macchine a fluido (o termiche)
¾ macchine elettriche
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 4
Page 2
Esempi di macchine generatrici a fluido
Pompa rotativa con palette
Compressore rotativo elicoidale
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 5
Esempi di macchine motrici a fluido
Turbina idraulica ad asse verticale
Motore alternativo a combustione interna
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 6
Page 3
Esempi di macchine motrici elettriche
Motore elettrico asincrono in corrente alternata
Motore elettrico in corrente continua
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 7
Esempi di macchine generatrici elettriche
Generatore di corrente alternata (alternatore)
Generatore di corrente continua (dinamo)
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 8
Page 4
MACCHINE OPERATRICI
Sono destinate alla realizzazione di operazioni
diverse da semplici trasformazioni di energia:
¾
¾
¾
¾
¾
¾
¾
macchine utensili
macchine da trasporto (veicoli)
macchine agricole
macchine tessili
macchine di sollevamento
macchine per uso domestico
ecc.
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 9
Esempi di macchine operatrici
Pettinatrice per cotone
Fresatrice orizzontale
Gru per edilizia
Robot industriale
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 10
Page 5
Esempi di macchine operatrici
Automobile
Autogru
Lavatrice
Escavatore
Laminatoio
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 11
TIPOLOGIA DELLE MACCHINE
¾
¾
¾
¾
A seconda di come sono collegati fra loro i vari
componenti, è possibile costruire sistemi di complessità
crescente:
macchine in ciclo aperto: cesoie, tornitrici, automobili,
gru, ecc.
macchine automatiche: confezionatrici, tavole rotanti,
macchine per l’industria dolciaria, farmaceutica, ecc.
macchine con sistema di controllo (in ciclo chiuso):
centri di lavorazione, robot, ecc.
impianti tradizionali o automatici: sono sistemi costituiti
da più macchine collegate fra loro in grado di realizzare
determinate produzioni con o senza l’intervento diretto
dell’uomo.
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 12
Page 6
1.2 - LA MACCHINA COME SISTEMA
Ogni macchina è in generale un sistema costituito da più
componenti. Tra questi:
¾ meccanismi (componenti meccanici elementari costituiti
prevalentemente da membri solidi): ingranaggi, camme,
giunti, innesti, freni, ecc.
¾ macchine energetiche: motori termici o elettrici, pompe,
compressori, dinamo e alternatori, ecc.
¾ componenti elettrici: motori elettrici, trasformatori,
interruttori, avvisatori acustici, cablaggi, ecc.
¾ componenti oleodinamici e pneumatici: motori, pompe,
distributori, valvole, filtri, steli, tubazioni, ecc.
¾ componenti di regolazione: strumenti di misura,
elementi di elaborazione dei segnali, sistemi di controllo,
ecc.
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 13
MECCANISMI
Insieme di corpi rigidi interconnessi (membri) che possono
muovere l’uno rispetto all’altro congruentemente con i
vincoli che ne limitano il reciproco moto relativo.
Il membro che rispetto al sistema di riferimento del moto è
fermo, se esiste, prende il nome di telaio.
Un meccanismo può, ad esempio, trasferire energia
meccanica da un membro movente con moto rotatorio a
un membro cedente con moto traslatorio:
en. meccanica
P=Mxω
MECCANISMO
en. meccanica
P=Fxv
Esempio di meccanismo
I meccanismi sono gli elementi di base per le macchine
e sono a loro volta costituiti da membri
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 14
Page 7
MEMBRI
I membri di una macchina possono essere:
¾ solidi
– rigidi
– deformabili
» elastici (molle, ecc.)
» anelastici (membrane, ecc.)
» flessibili (cinghie, catene, funi)
¾ fluidi
– liquidi (acqua in pompe, olii in trasmissioni oleodinamiche, ecc.)
– aeriformi (vapori o gas in turbine, ventilatori, compressori, ecc.)
Si noti che la divisione fra membri rigidi e deformabili in realtà
serve per distinguere quei membri le cui deformazioni sono così
piccole da poter essere trascurate nell’analisi di posizione da
quelli in cui la deformazione è un elemento essenziale del loro
funzionamento (a rigore, nessun corpo è perfettamente rigido).
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 15
TIPI DI MECCANISMI
I meccanismi possono essere divisi in due categorie:
¾ meccanismi per la trasmissione di potenza
obiettivo principale è la variazione di forze e momenti
trasmessi:
–
–
–
–
–
ruote dentate
ruote e flessibili
innesti
freni
ecc.
¾ meccanismi per il moto vario
obiettivo principale è la variazione della legge del moto:
–
–
–
–
sistemi articolati
camme
meccanismi per moto intermittente
ecc.
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 16
Page 8
IMPIANTI
Gli impianti sono insiemi di macchine variamente collegate,
utilizzate per realizzare compiti complessi:
¾ produzione di energia
¾ produzioni industriali
¾ assemblaggio, confezione, distribuzione, ecc.
Si distinguono diversi livelli di autonomia ed integrazione a
seconda della presenza di:
¾ regolazione
¾ controllo
¾ automazione
– rigida
– flessibile
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 17
1.3 - STUDIO DELLE MACCHINE
I problemi tipici studiati dalla Meccanica Applicata alle
Macchine possono essere ricondotti ai due tipi fondamentali:
¾ Problemi di analisi
Dato il meccanismo e l’equazione oraria di uno o più membri,
l’analisi dei meccanismi consiste nel determinare la legge del
moto dei punti di ogni membro e le forze e coppie agenti sui
vari membri.
¾ Problemi di sintesi
La sintesi consiste nel creare il meccanismo che soddisfi le
specifiche di progetto, ovvero i requisiti di partenza.
Le specifiche di progetto possono consistere nella legge del
movimento di uno o più punti del meccanismo, negli angoli di
trasmissione, nella posizione dei perni a telaio, ecc.
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 18
Page 9
¾ ANALISI
– dati:
» il meccanismo
» l’equazione oraria di un suo membro (in genere il movente)
– determinare:
» legge del moto (posizione, velocità, accelerazione) di ogni suo membro
» forze e coppie agenti su ogni membro
¾ SINTESI
– date le specifiche di progetto:
» leggi del moto di uno o più punti (in genere il cedente)
» punti fissi a telaio
» angoli di trasmissione delle forze
– determinare:
» il tipo di meccanismo (sintesi di tipo)
» il numero e la disposizione dei membri (sintesi di numero)
» le dimensioni geometriche (sintesi dimensionale)
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 19
STUDIO CINEMATICO E DINAMICO
¾ CINEMATICA: studio del movimento senza tener conto delle
forze che lo producono
(in genere: ipotesi di corpi rigidi; la massa è ininfluente)
modello cinematico = eq. algebriche non lineari di posizione +
eq. algebriche lineari di velocità e di accelerazione
¾ DINAMICA: studio della trasmissione del movimento sotto
l’azione delle forze applicate
modello dinamico = eq. differenziali + eq. algebriche
Tecniche disponibili per lo studio cinematico e dinamico:
¾ tradizionali
– grafiche
– numeriche
¾ CAD (assistite dal calcolatore)
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 20
Page 10
LIVELLI DI APPROSSIMAZIONE
Si adottano livelli di approssimazione diversi a seconda delle
finalità dello studio; in particolare si considera:
¾ il funzionamento reale (o condizioni reali) se i fenomeni dissipativi
devono essere presi in considerazione
¾ il funzionamento ideale (o condizioni ideali) se i fenomeni dissipativi
possono essere trascurati
Lo studio delle macchine in condizioni reali è molto complesso a
causa di:
–
–
–
–
non linearità
masse distribuite
deformabilità dei membri
giochi negli accoppiamenti
Le ipotesi di membri perfettamente rigidi e privi di massa, tipica
della meccanica tradizionale, non sono sempre accettabili.
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 21
IPOTESI DELLO STUDIO:
SISTEMI MECCANICI PIANI
¾ Sistemi in cui tutti i corpi o membri si muovono su di un
piano o in piani paralleli
¾ L’analisi cinematica e dinamica è più facile perché:
– la modellazione della posizione e dell’orientamento dei corpi è
più semplice che nello spazio: sono sufficienti 3 parametri
invece di 6
– i concetti sono più facilmente assimilabili nel contesto dei
sistemi piani
– la rappresentazione grafica è più immediata
¾ I concetti acquisiti nella formulazione dei modelli piani
possono essere estesi al caso di meccanismi spaziali
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 22
Page 11
IPOTESI DELLO STUDIO: RIGIDEZZA
¾ I sistemi meccanici possono essere considerati
come formati da corpi rigidi, cioè tali che le
distanze tra punti assegnati dello stesso corpo
rimangano costanti durante il funzionamento
¾ Ogni particella in un corpo rigido è individuata dal
suo vettore posizione, che è costante in un
sistema di riferimento solidale al corpo (viene
indicato come sistema di riferimento del corpo)
¾ In realtà si hanno sempre deformazioni quando si
applicano delle forze
¾ Si può adottare l’ipotesi di rigidezza se le
deformazioni riscontrabili risultano molto inferiori
agli spostamenti realizzati
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 23
CONDIZIONI DI FUNZIONAMENTO
¾ moto in transitorio:
– si verifica nella fase di avviamento o di arresto delle macchine ed è
generalmente un moto vario.
¾ moto a regime:
– uniforme o assoluto se l’atto di moto di tutti i membri si mantiene costante in
qualunque intervallo di tempo
– periodico se l’atto di moto di tutti i membri si ripete dopo un intervallo di tempo
(periodo)
¾ Inoltre il moto si dice ciclico se, dopo l’avvio da qualsiasi posizione
relativa, i membri di una macchina passando attraverso tutte le posizioni
che possono assumere, ritornano alla loro posizione relativa originale:
» continuativo se durante ogni successivo ciclo non si arresta
» intermittente se durante ogni ciclo si arresta per un intervallo di tempo
finito
» alternativo se ad ogni ciclo si inverte il verso di movimento
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 24
Page 12
1.4 - COPPIE CINEMATICHE
La principale caratteristica dei sistemi meccanici è quella di
essere costituiti da più corpi (membri), collegati fra loro in modo
opportuno.
In conseguenza di tali
legami (vincoli) risultano
Esempio:
limitate le possibilità di
ingranaggio conico diritto
movimento di ciascun
membro relativamente agli
altri, ossia il numero dei
gradi di libertà del singolo
membro e di tutta la
membro
macchina.
vincolo
membro
Coppia conica
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 25
SPOSTAMENTI RELATIVI
Consideriamo 2 corpi nello spazio tra cui sia possibile uno
spostamento relativo e definiamo 2 terne {A} e {B} solidali
ai 2 corpi, rispettivamente:
{xA, yA, zA} in OA
e {xB, yB, zB} in OB
Lo spostamento relativo tra i 2 corpi in
assenza di vincoli è espresso da 6
parametri (gradi di libertà del moto
relativo) e può essere descritto per
mezzo delle 2 terne {A} e {B}:
– 3 componenti cartesiane per definire lo
spostamento relativo delle origini delle
2 terne lungo i 3 assi coordinati
– 3 parametri indipendenti (ad esempio
tre angoli) per definire l’orientamento
relativo delle due terne nelle 3 direzioni
dello spazio
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 26
Page 13
Terne spaziali
ROTAZIONI NEL PIANO
Nel caso di moto piano le rotazioni avvengono sempre intorno
all’asse Z e la matrice di rotazione assume la forma
semplificata:
Xˆ B • Xˆ A YˆB • Xˆ A cos ϑ − sen ϑ
A
A ˆ
A ˆ
=
=
R
X
Y
=
B
B
B
ˆ
ˆ
ˆ ˆ
X B • YA YB • YA sen ϑ cos ϑ
La matrice di rotazione consente di
ricavare in modo semplice le
coordinate di un punto P rispetto al
sistema di riferimento {A}, una volta
nota la sua posizione in {B} e l’entità
della rotazione tra le 2 terne:
A xP c ϑ − s ϑ B xP
A
A B
P = BR P → A =
B
yP s ϑ c ϑ yP
Rotazioni di terne
A xP = c ϑ B xP − s ϑ B y P
A
B
B
y P = s ϑ xP + c ϑ y P
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 27
VINCOLI
Chiamiamo vincolo ogni dispositivo che limita le posizioni e le
velocità dei punti del sistema meccanico: pertanto la presenza
di un vincolo tra i membri 1 e 2 riduce la mobilità relativa dei
membri stessi.
I vincoli possono essere espressi analiticamente mediante
relazioni fra le coordinate e le velocità di punti del sistema:
Ψ (… , Pi , Pi , … , t ) ≥ 0
dove ψ è un vettore di dimensione pari al numero delle
relazioni (equazioni e disequazioni).
Un vincolo è detto bilaterale se le restrizioni imposte al sistema
si rappresentano tramite sole equazioni (es: punto vincolato ad una
linea, corpo con un punto fisso), mentre è detto unilaterale se
compare almeno una disequazione (es: corpo appoggiato ad un piano o
vincolato a stare all’interno di una sfera).
Un vincolo è interno se è dovuto alla costituzione del corpo
stesso (per es. rigidezza) ed esterno se è dovuto alla presenza di
altri corpi.
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 28
Page 14
Un vincolo bilaterale è detto olonomo o geometrico o di posizione
se limita direttamente solo le posizioni del sistema e quindi non
compare nella sua equazione la dipendenza dalle velocità:
Ψ ( P1 , … , Pi , … , Pn , t ) = 0
mentre è detto anolonomo o cinematico o di mobilità se limita
anche le velocità dei punti.
Perché un vincolo risulti effettivamente anolonomo occorre che la
sua equazione di vincolo (alle derivate prime rispetto al tempo)
risulti non integrabile: per esempio è olonomo un vincolo che
realizza la condizione di rotolamento senza strisciamento di un
rullo rigido su un piano, mentre è anolonomo il vincolo di
rotolamento senza strisciamento di una sfera rigida su un piano.
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 29
GRADI DI LIBERTÀ
Un sistema è detto olonomo se i suoi eventuali vincoli sono tutti
olonomi: allora le sue possibili configurazioni possono essere
univocamente individuate mediante un numero minimo n di
parametri indipendenti q1, ..., qn chiamati coordinate lagrangiane;
si dice che il sistema ha n gradi di libertà.
I vincoli olonomi bilaterali “sottraggono” al sistema tanti gradi di
libertà quante sono le corrispondenti equazioni di vincolo; quelli
unilaterali, invece, non diminuiscono i gradi di libertà del sistema
(per es. un punto vincolato a muoversi all’interno di una stanza ha ancora 3 g.d.l.). I
vincoli anolonomi, imponendo delle restrizioni solo sulle velocità
dei punti del sistema, non impediscono il raggiungimento di
alcuna posizione e quindi anch’essi non fanno diminuire il
numero di g.d.l.
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 30
Page 15
Esempio di vincolo olonomo: disco su piano
Z
•
R
θ
G
C
X
•
XG
se il disco è vincolato ad essere
appoggiato al piano ma può strisciare
su di esso ha 2 gradi di libertà: xG e θ
nel caso di puro rotolamento (xG = R θ)
1 grado di libertà: xG oppure θ
In generale il rullo, se vincolato a rimanere a contatto con il piano, ha 2
gradi di libertà (per esempio la posizione xG del centro G e la rotazione θ
attorno al centro stesso); se, invece, si impone la rotazione senza
strisciamento del rullo sul piano, viene introdotta la corrispondente
equazione di vincolo vC = 0, per cui:
vG = vC + ω ∧ ( G − C )
→
xG = θ R
che lega la velocità di avanzamento del rullo alla sua velocità angolare.
Tale equazione è integrabile, ottenendo:
x G = x G0 + θ R
per cui il vincolo è olonomo ed il sistema ha solo 1 g.d.l.
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 31
Esempio di vincolo anolonomo: sfera su piano
Z
La sfera rappresentata in figura, vincolata a
rimanere a contatto con il piano, ha 5 gradi di
libertà: per es. si possono scegliere come
G
coordinate lagrangiane la posizione {xG, yG} del
C
Y
suo centro ed il suo orientamento,
X
rappresentato dagli angoli {ψ, θ, φ}
Se si impone il vincolo che la sfera rotoli senza strisciare sul piano, viene anche
in questo caso introdotta la corrispondente equazione di vincolo vC=0 ovvero:
R
vC = vG+ ω Λ (C-G) = 0
che lega le velocità lineari ed angolari della sfera. Tale equazione si può
sviluppare ed esprimere in funzione delle coordinate lagrangiane, ottenendo:
(
(
)
)
xG = ψ sen ϑ cos ϕ − ϑ sen ϕ R
vGx − ω y R = 0
vGy − ω x R = 0 → yG = ψ sen ϑ sen ϕ + ϑ cos ϕ R
vGz = 0
zG = 0
Poiché tale sistema di equazioni non è integrabile, il vincolo è anolonomo e la
sfera ha ancora 5 g.d.l.: ciò significa che, con opportune manovre, è ancora
possibile “parcheggiare” la sfera in qualsiasi posizione con qualsiasi
orientamento prefissato senza farla mai strisciare.
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 32
Page 16
COPPIE CINEMATICHE
Si definisce coppia il sistema formato da 2 membri contigui
collegati: se tra di essi esiste un movimento relativo (cioè il sistema
ha almeno 1 g.d.l.) si ha una coppia cinematica.
Le coppie sono caratterizzate essenzialmente dallo spostamento
relativo dei membri a contatto, che dipende dalla forma delle
superfici che sono in contatto durante il moto: tali superfici sono
dette superfici coniugate.
Uno stesso spostamento relativo fra i membri può essere ottenuto
con differenti coppie di superfici coniugate: l’effettiva forma
costruttiva ha influenza sulla trasmissione delle forze, l’usura,
l’ingombro, ecc. (es: in figura sono visualizzati diversi sistemi che realizzano lo stesso
spostamento relativo con diverse modalità)
Guida e pattino
Coppia prismatica
Guida volvente
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 33
Dal punto di vista cinematico si distinguono:
– contatti di rotolamento
– contatti di strisciamento
– contatti di urto
ωπ
ω
vt
vn
ωτ
contatto di strisciamento
contatto di rotolamento
contatto d’urto
Dal punto di vista realizzativo si distinguono:
– accoppiamenti di forma (es: perno cilindrico in sede cilindrica)
– accoppiamenti di forza (es: bloccaggio di un pezzo in una pinza)
Tutte le coppie possono essere realizzate in entrambi i
modi: gli accoppiamenti di forza sono monolaterali ed il
contatto è mantenuto da opportune forze e momenti.
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 34
Page 17
In relazione alla geometria del contatto si hanno :
– contatti puntiformi (cuscinetto a sfere)
– contatti lineari (cuscinetto a rulli)
– contatti superficiali (vite-madrevite)
Tipi di contatto
Si indica come classe di una coppia cinematica il
numero di gradi di libertà nel moto relativo
contatto
puntiforme:
ingranaggio
sghembo
elicoidale
contatto
lineare:
camma-piattello
contatto
superficiale:
pattino-guida
Coppie con diversi tipi di contatto
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 35
COPPIE CINEMATICHE INFERIORI
Si definiscono coppie elementari o inferiori quelle coppie rigide
che sono realizzabili tramite contatti di superficie: le superfici
coniugate sono rigide, identiche e combacianti e sono
necessariamente superfici cilindriche, di rivoluzione o elicoidali.
¾ Coppie cinematiche inferiori:
–
–
–
–
–
–
R
P
S
C
F
G
rotoidale (revolute)
prismatica (prismatic)
elicoidale (screw )
cilindrica (cylindrical)
piana (flat)
sferica (globular)
Nell’uso corrente sono spesso considerate “elementari”
esclusivamente le coppie che lasciano 1 solo grado di libertà, e
quindi quelle rotoidali, prismatiche ed elicoidali.
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 36
Page 18
COPPIE CINEMATICHE INFERIORI
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 37
COPPIE CINEMATICHE SUPERIORI
Si definiscono superiori le coppie cinematiche che non sono
inferiori; esse non sono in alcun modo realizzabili tramite
contatti di superficie ma esclusivamente tramite contatti lineari
o puntiformi. Tutte le coppie tra membri non rigidi sono
superiori (per es. accoppiamento puleggia-flessibile; fluidocondotti di turbina). La camma piana è una coppia superiore.
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 38
Page 19
1.5 - CATENE CINEMATICHE E
MECCANISMI
Le catene cinematiche sono sistemi di membri collegati tra loro
da coppie cinematiche.
Una catena è detta:
¾ semplice: se ciascun membro presenta 1 o 2 accoppiamenti
¾ composta: se almeno un membro presenta 3 o più
accoppiamenti
¾ chiusa: se si instaurano percorsi chiusi tra i membri della
catena
¾ aperta: se non si instaurano percorsi chiusi tra i membri della
catena
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 39
I membri delle catene cinematiche sono anche detti:
¾ membri binari se presentano 2 accoppiamenti
¾ membri ternari se presentano 3 accoppiamenti
¾ membri quaternari se presentano 4 accoppiamenti
¾ ....
Nello studio delle catene cinematiche si astrae spesso dalla loro
effettiva realizzazione e si utilizzano due tipi di schemi:
z schema cinematico: schema della geometria della catena
essenziale per la definizione del movimento
z schema strutturale: schema che rispetta la struttura della
catena (non la geometria): le coppie possono essere
rappresentate con i relativi simboli o con cerchi affiancati dai
simboli
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 40
Page 20
Esempio di
catena cinematica chiusa semplice
Schema cinematico
Rappresentazione
geometrica della
catena
Schema strutturale
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 41
Esempio di
catena cinematica chiusa composta
Schema cinematico
Rappresentazione
geometrica della
catena
Schema strutturale
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 42
Page 21
Esempio di
catena cinematica aperta semplice
Schema cinematico
Rappresentazione
geometrica della
catena
Schema strutturale
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 43
Esempio di
catena cinematica aperta composta
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 44
Page 22
MECCANISMI
¾ Meccanismo: è una catena cinematica con un membro fissato
al riferimento assoluto
¾ Il membro fisso è detto telaio
MOVENTI
MECCANISMO
lavoro motore
CEDENTI
lavoro resistente
A M B I E N T E
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 45
MECCANISMI CINEMATICAMENTE EQUIVALENTI
Si dicono cinematicamente equivalenti meccanismi che per lo
stesso moto dei moventi forniscono lo stesso moto dei cedenti
Meccanismo a camma piana e quadrilatero articolato cinematicamente equivalente
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 46
Page 23
ANALISI DI MOBILITA’
Analisi di mobilità di un meccanismo: è la determinazione del campo
ammissibile per gli spostamenti
– è funzione della struttura: le coppie non solo riducono il numero di
g.d.l. del meccanismo, ma introducono anche delle limitazioni al
campo ammissibile degli spostamenti
– è funzione della geometria
Es: spazio di lavoro del robot COMAU SMART 6.10P
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 47
Esempio: mobilità dei quadrilateri articolati
Consideriamo il quadrilatero
incernierato a telaio in O1 ed
O2 e chiamiamo s ed l le
lunghezze dei due membri più
corto e più lungo
rispettivamente, mentre
indichiamo con p e q le
lunghezze dei due membri
rimanenti.
L’asta b (opposta al telaio d ) viene chiamata biella, mentre i membri a e
c vengono chiamati manovelle o bilancieri a seconda che compiano
rotazioni complete oppure no.
Condizioni di Grashof
se l + s > p + q il quadrilatero ha 2 bilancieri;
altrimenti:
- è del tipo manovella-manovella se d è il membro più corto,
- è del tipo manovella-bilanciere se a oppure c è il membro più corto,
- ha ancora 2 bilancieri se b è il membro più corto.
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 48
Page 24
EQUAZIONE DI STRUTTURA
per meccanismi nello spazio tridimensionale
¾ Il numero di gradi di libertà n (detto anche grado di
mobilità) di un meccanismo con m membri rigidi, uno
dei quali è il telaio, è:
n = 6(m-1) - 5c1 - 4c2 - 3c3 - 2c4 - c5
dove:
ci = numero delle coppie cinematiche di classe “i”
presenti nel meccanismo
¾ Il numero di gradi di libertà N della corrispondente
catena cinematica vale:
N = 6 m - 5c1 - 4c2 - 3c3 - 2c4 - c5 = n + 6
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 49
EQUAZIONE DI STRUTTURA
per meccanismi nel piano
Nel piano un corpo libero ha 3 gradi di libertà:
• 2 coordinate di posizione
• 1 coordinata di rotazione
Un meccanismo composto da m membri ha n gradi di libertà,
forniti dalla equazione di Grübler :
n = 3 (m-1) - 2 c1 - c2
c1 = numero delle coppie cinematiche di classe “1” (rotoidali,
prismatiche)
c2 = numero delle coppie cinematiche di classe “2” (camme piane)
• se n ≥ 1 si tratta di un meccanismo
• se n = 0 si tratta di una struttura isostatica
• se n < 0 si tratta di una struttura iperstatica
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 50
Page 25
EQUAZIONE DI STRUTTURA
casi particolari
L’equazione di struttura deve essere applicata con
cautela in alcuni casi particolari:
¾ nel caso in cui una coppia connetta più di 2 membri
occorre contare il vincolo più volte (tante quanto i
membri concorrenti nella coppia meno 1)
¾ nel caso in cui il meccanismo contenga una parte
con un grado di mobilità negativo, il risultato
derivante dall’applicazione della formula globalmente
a tutto il meccanismo è errato
¾ si ottengono risultati errati anche quando la
geometria del meccanismo è tale da diminuire i
vincoli effettivi imposti dagli accoppiamenti.
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 51
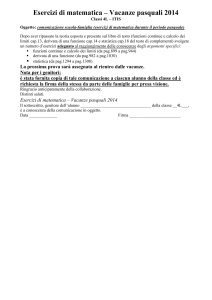
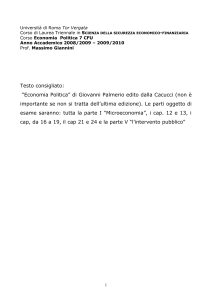
Esempio: gradi di libertà per il meccanismo
biella-manovella
2
3
1
1
m=4
C1 = 4
4
numero membri
numero vincoli di classe 1 di cui
3 coppie rotoidali: tra il telaio 1 e la manovella 2
tra la manovella 2 e la biella 3
tra la biella 3 e il pattino 4
ed 1 coppia prismatica tra il pattino 4 e il telaio 1
L’equazione di Grübler fornisce:
n = 3(4-1) - 2x4 = 1 grado di mobilità
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 52
Page 26
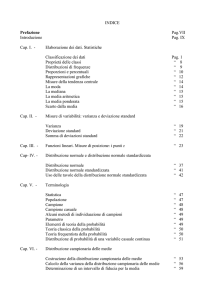
Esempio: gradi di libertà per un meccanismo
piano a camma
3
1
1
1=telaio
2=camma
3=cedente
2
1
1
m=3
c1=2
1 coppia rotoidale tra 1 e 2
1 coppia prismatica tra 3 e 1
c2=1
1 coppia di tipo camma piana
tra il cedente 3 e la camma 2 (2 gradi di libertà
nel moto relativo: la camma può ruotare e
strisciare)
3
n= 3x2 - 2x2 - 1 = 1
1
1
Nel caso di cedente a rotella (a destra) la regola di Grübler
si applica diversamente: c’è un membro in più (la rotella) e
il contatto tra rotella e camma si suppone senza
strisciamento (quindi di classe 1); pertanto:
4
2
n = 3x3-2x4 = 1
1
1
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 53
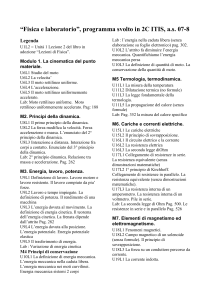
Esempio: gradi di libertà di sistemi articolati
Vengono chiamati sistemi articolati i meccanismi ottenuti collegando
i membri esclusivamente tramite coppie rotoidali o prismatiche.
Pentalatero articolato
3
4
tutte coppie rotoidali
m=5
c1=5
2
5
n = 3x4 - 2x5 = 2
11
meccanismo a 2 g.d.l.
3
2
1
2
3
4
1
Arco a tre cerniere
m=3
c1 =3
n = 3x2 - 2x3 = 0
struttura isostatica
m=4
c1 =5 (2 rotoidali coincidenti)
n = 3x3 - 2x5 = -1
struttura iperstatica
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 54
Page 27
Esempio: vincoli virtuali
2
m=4
3
O M
1
4
1
2
3
M
4
5
c1=4 2 coppie rotoidali
2 coppie prismatiche
Si dimostra banalmente che il punto M dell’asta 3
equidistante dai pattini 2 e 4 descrive una circonferenza
di raggio l/2, essendo l la lunghezza dell’asta 3.
n = 3x3 - 2x4 = 1
L’aggiunta di un’asta 5 incernierata in M ed in O non
cambia quindi il comportamento funzionale del
meccanismo: tale asta impone infatti ad M di percorrere la
stessa circonferenza di cui sopra; in presenza di un
vincolo apparente o ridondante come questo non vale
l’equazione di struttura per il calcolo dei g.d.l.
m=5
c1=6
n = 3x4 - 2x6 = 0 NO !!
n = 1 sempre
O
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 55
Esempio: coppie multiple
Nel caso di meccanismi con catene composte (cioè con
accoppiamenti multipli) l’equazione di struttura non dà
risultati corretti se applicata senza cautela; ad es.
(meccanismo di Watt):
1
2
3
4
6
n = 3x5 - 2x6 = 3 NO
2 rotoidali coincidenti, quindi:
5
2
1
6
Schema strutturale corretto:
4
3
5
n = 3x5 - 2x7 = 1 SI
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 56
Page 28
MECCANISMI ASSOCIATI
Per una catena cinematica composta da 2 membri a contatto
attraverso 1 coppia di tipo camma si ottengono 2 g.d.l.,
esattamente come nel caso di 3 membri accoppiati tramite 2
rotoidali.
Pertanto, ai fini dello studio della mobilità, a volte si definisce
un meccanismo associato a quello originale ottenuto
tramite la sostituzione della camma con un membro
incernierato agli estremi da 2 rotoidali. Gli schemi strutturali,
pertanto, spesso considerano solo coppie rotoidali o
prismatiche (di classe 1).
Si noti che con sole coppie di classe 1, dall’equazione di
Grübler, per ottenere meccanismi con 1 g.d.l., occorre che il
numero delle coppie c sia:
c=
3
m−2
2
da cui il numero di membri m deve essere pari.
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 57
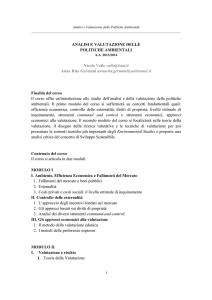
Catene
cinematiche
ad 1 g.d.l.
Atlante delle catene
cinematiche a 1 g.d.l. e
numero di membri
inferiore o uguale a 6
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 58
Page 29
Esempio: meccanismi ad 1 g.d.l.
esalatero
di Watt
esalatero
di Watt
Meccanismi, schemi strutturali e catene cinematiche associate
Meccanica Applicata alle Macchine 1 - A.A. 2004/2005 – Cap. 1 - pag. 59
Page 30