Equilibrio MHD
Siamo ora in grado di studiare, almeno nell’ approssimazione di fluido MHD ideale, le
condizioni generali di equilibrio di una colonna di plasma confinata da un campo magnetico.
In condizioni di equilibrio statico u e le sue derivate sono nulle e le equazioni MHD diventano:
1
1
du
(21-1)
∇p = J × B
ρm
= −∇p + J × B
c
dt
c
(21-2)
4π
∇×B =
J
(21.3)
c
∇⋅B = 0
Eliminando J fra le prime due, e facendo uso della identità vettoriale
B2
possiamo ottenere una equazione per l’ equilibrio di pressioni: ∇ × B × B = −∇( ) + (B ⋅ ∇)B
2
(21.4)
B2
1
∇( p + ) =
(B ⋅ ∇ )B
8π
4π
con la pressione magnetica B2 /8π che gioca lo stesso ruolo della pressione del fluido,
La relazione (21.4) è importante perché è la condizione a cui deve soddisfare un campo
magnetico statico (B) per poter confinare un fluido conduttore dotato di pressione (p).
Osserviamo in particolare che se le linee di campo magnetico non hanno curvatura, il
termine a secondo membro della (21.4) è nullo, questa relazione si riduce a:
B2
∇( p + ) = 0
(21.5)
8π
ed otteniamo così il risultato che, nelle ipotesi di validità di questa relazione, la pressione
totale ossia la somma della pressione ordinaria (p) e della 'pressione magnetica
(B2/8π) è costante in tutti i punti dello spazio .
1
Si può dimostrare che le equazioni scritte dalla (21.1) alla (21.3), hanno alcune
interessanti conseguenze. Dalla (21.1) J x B = c∇p , segue che il gradiente
della pressione è perpendicolare sia a J che a B, quindi
J ⋅ ∇p = 0
(21.6)
B ⋅ ∇p = 0
(21.7)
Dalla (21.7) si vede che la pressione deve essere costante lungo le
linee di campo magnetico ossia le linee di campo devono giacere
su superfici a pressione costante.
Le linee di forza pertanto giacciono su superfici dette 'superfici
magnetiche‘ e le superfici magnetiche sono anche superfici le superfici a pressione
costante (superfici isobariche).
Allo stesso modo, dalla (21.6) si vede che le linee di corrente devono giacere su superfici a
pressione costante. Quindi, le superfici con p = cost (perpendicolari a ∇p) sono sia "superfici
magnetiche" che 'superfici di corrente'. Dalla (21.2) ∇ x B = 4π /c J segue:
0 = ∇ ⋅ (∇ × B) = ∇ ⋅ J = 0
∇⋅B = 0
cioè:
così come anche:
(21.8)
∇⋅J = 0
Dato che sia B che J hanno divergenza nulla (ossia sono quantità solenoidali), le linee di
campo magnetico e quelle di corrente o vanno all’ infinito o sono chiuse al finito. Se il plasma si
estende in un volume limitato, le superfici magnetiche devono essere necessariamente chiuse
e tali da essere contenute una nell'altra (vedi figura) all'interno di questo volume.
2
Si può dimostrare che se p, J e B sono funzioni lentamente variabili delle coordinate
spaziali e se le superfici magnetiche ed isobariche si trovano all'interno di un volume
limitato, e inoltre se B e J non sono mai nulli in questo volume, le superfici magnetiche
assumono la generica forma di toroidi. La topologia toroidale delle macchine usate per il
confinamento di plasmi termonicleari è pertanto suggerita da questa proprietà.
La superficie degenerata che consiste in una linea chiusa al 'centro’ del sistema di superfici
magnetiche contenute l'una nell'altra si chiama asse magnetico.
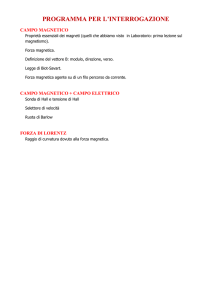
La figura mostra un insieme di superfici contenute l'una
nell'altra sulle quali la pressione aumenta passando
dall'esterno verso l'asse (p0< p1 < p2 <….); le correnti sono
tali che la forza J x B sia diretta verso l'asse.
Il fatto importante qui è che un plasma MHD ideale può
essere confinato interamente dalla forza magnetica;
questo va sotto il nome di 'confinamento magnetico'.
Un altro aspetto interessante e’ che se un plasma con ∇p ≠ 0 si trova in equilibrio in un
campo B applicato dall'esterno, deve necessariamente generarsi nel plasma una
corrente J compatibile con la ∇p = (1/c) J x B, che rende conto su scala macroscopica
dell'effetto di diamagnetismo, per il quale il campo 'interno' al fluido è più debole di
quello 'esterno'
3
Corrente diamagnetica
Per calcolare questa corrente (detta 'corrente diamagnetica'), moltiplichiamo la
vettorialmente per B:
1
∇p = J × B
c
(21.9)
cB 2 J //
c(B × ∇p) = cB × (J × B) = cB 2 J − c(B ⋅ J)B
da cui ricaviamo la componente J⊥ perpendicolare al campo magnetico,
J⊥ =
B × ∇p
cB 2
(21.10)
mentre quella parallela è nulla :
Questa corrente può essere misurata sperimentalmente e fornisce, noto il campo
magnetico, una misura dell’ energia interna del plasma .
4
Proprieta’ di un fluido MHD ideale: Plasmi “Force free”
Se il rapporto tra la pressione cinetica e la pressione magnetica e’ piccola ∇p ≅ 0
c∇p = J × B
la
J×B ≅ 0
(21.11)
In questo caso (detto configurazione priva di forze - force free) linee di campo
magnetico e linee di corrente sono parallele ossia i due vettori differiscono per una
costante:
J
Prendendo la divergenza di entrambi i membri:
∇·J
j
=0
(B ⋅ ∇) µ e’ la componente del gradiente di µ nella direzione del campo magnetico B
ossia lungo la linea di forza. Se il ∇µ e’ nullo lungo la linea di forza vuol dire che il
rapporto µ e’ costante lungo le linee di forza di B ossia e’ costante su una
superficie magnetica.
Per esempio in geometria cilindrica l’ equazione del rotore diventa semplicemente
∇×B =
4π
4π
J=
µ ( r )B
c
c
(21.12)
Che permette direttamente il calcolo delle componenti del campo utilizzando le funzioni di Bessel:
Bz= B0 J0(µ0 r) e Bθ= B0 J1(µ0 r)
5
Confinamento magnetico in geometria cilindrica θ − pinch
Le equazioni MHD dimostrano in un modo auto-consistente che e’ possibile, in linea
di principio, confinare un plasma mediante un campo magnetico in geometrie in cui
valgano per il plasma le equazioni MHD.
Vari tipi di geometrie di confinamento in geometria lineare e toroidale sono state
proposte e realizzate
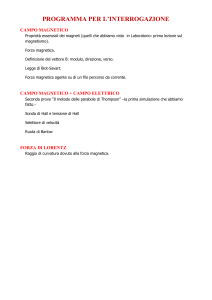
Consideriamo per esempio il caso ideale di un
solenoide di lunghezza infinita che, come e’ noto,
produce, al suo interno, un campo magnetico
costante con linee di forza rettilinee lungo l’ asse
del solenoide. In questa configurazione nota come
∇p
z θ
θ – pinch, in assenza di plasma, sia il campo
r
magnetico (uniforme) uguale a B0. In presenza di
plasma il campo magnetico auto consistente e’ dato
dalla :
B2
1
B2
(21.13)
∇( p + ) = 0
∇( p + ) =
(B ⋅ ∇ )B
8π
8π
4π
Ovvero la configurazione magnetica puo’ confinare un plasma MHD fino ad una massima
pressione cinetica pari a
(21.45)
pmax = B02/8π
(21.13 bis)
E’ pertanto ovvia la presenza di alti campi magnetici per confinare plasmi di alta pressione
6
cinetica (ossia alta temperatura)
Sistemi di confinamento lineari : θ − pinch
In pratica un θ − pinch e’ un tubo di scarica inserito in un solenoide costituito da una serie
di bobine o semplicemente costituito un conduttore metallico a forma di spira molto larga,
percorsa da una forte corrente rapidamente variabile, ottenuta mediante la scarica di un
banco di condensatori in cui sia stata immagazzinata una grande quantità di energia
elettrica . All'interno della spira si genera un campo magnetico assiale (Bz) rapidamente
variabile, che induce nel plasma delle correnti azimutali (Jθ), che scorrono in direzione
opposta a quelle che percorrono la spira.
E’ utile schematizzare il fenomeno facendo l'ipotesi che il
plasma si comporti come un fluido perfettamente
conduttore con una pressione cinetica costante; il campo
magnetico prodotto dal solenoide esterno e’ presente solo
nella regione compresa fra il plasma ed il conduttore
metallico, dato che non può penetrare nel plasma, per la
conservazione del flusso magnetico all’ interno del fluido.).
z
θ
r
Jθ
Sulla superficie del fluido si genera una corrente diamagnetica azimutale, che
comprime (pinch) il fluido fino a quando pressione magnetica e cinetica si eguagliano
ossia la quantità
p
βθ =
=1
(21.14)
2
B
(
0
8π
)
La quantità βθ e’ pertanto la misura delle capacità del sistema a confinare un plasma
avente una certa pressione cinetica (ovvero temperatura)
7
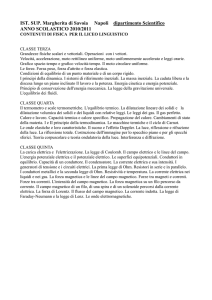
Sistemi di confinamento lineari : θ − pinch
In realtà, per una conduttività finita, il campo magnetico penetra (o diffonde), all'interno del
plasma ed il plasma diffonde attraverso le linee di campo magnetico.
In un caso reale si avrà pertanto una situazione a contorni diffusi, con una pressione
cinetica in generale crescente ed una pressione magnetica decrescente verso il centro del
solenoide.
MHD ideale
MHD resistivo
8π
p
8π
8π
Jθ
8π
r
8
Generazione di alti campi magnetici
I circuiti utilizzati per la produzione di campi magnetici per esperimenti
di fisica del plasma funzionano in generale in regime impulsato.
S
Dato che e’ necessaria la produzione di forti correnti l’ energia
elettrica e’ immagazzinata in banchi di condensatori, che sono caricati +V
0
a bassa corrente fino alla tensione massima +V0 e poi scaricati
rapidamente chiudendo l’ interruttore S alimentando gli elettromagneti
con forti correnti I .
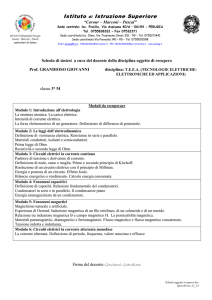
N circuito di scarica tipico e’ mostrato in figura: alla chiusura del
circuito il banco di condensatori e’ caricato ad una tensione positiva
+V0 e il banco di diodi e’ interdetto. Se si trascura la (piccola)
resistenza, il circuito equivalente e’ un circuito LC in serie. Alla
chiusura di S la tensione V ai capi dell’ elettro magnete decresce con
una legge V= V0 cos(Ωt) con Ω = (LC)1/2 e la corrente cresce come
I= I0 cos(Ωt) con I0 = V0 (L/C)-1/2
.Al tempo tC (pari a un quarto di periodo) la tensione ai capi del diodo
si inverte. Il diodo entra in conduzione e aggancia la tensione a V=0.
I
L
C
Tempo dell’ esperimento
V
I
t
tC
Per t > tC la corrente (e quindi il campo magnetico) decade con legge I0 = I0 e-t(R/L). Dato che R e in generale
molto piccolo e L e’ grande τ = L/R e’ in generale parecchie decine di secondi. Il campo magnetico B
rimane pertanto approssimativamente costante per il tempo dell’ esperimento.
9
Sistemi di confinamento lineari : Ζ − pinch
Come visto nella lezione precdente lo “Z-pinch” consiste in una colonna di fluido cilindrica,
anche in questo caso di lunghezza infinita, che conduce correnti nella direzione dell'asse z
(Jz ). Queste creano così un campo magnetico azimutale (Bθ) e pertanto linee di forza di j
e di B sono scambiate rispetto alla configurazione del θ – pinch. La forza J x B è di nuovo
radiale, diretta verso l'asse.
Uno Z-pinch’ si ottiene provocando una scarica in
un gas a bassa pressione all'interno di un tubo di
φθ
vetro, fra due elettrodi terminali, simile a quelli usati
θ
per l’ illuminazione. Questi sono evidentemente a
∇p
contatto col plasma e la corrente totale che
percorre il plasma uguaglia quella del circuito
r
esterno che alimenta la scarica.
In coordinate cilindriche r,z e θ, dato che le coordinate z e θ
sono ignorabili per la simmetria del problema, l’ equazione
per il bilancio di pressione
si riduce a :
B2
1
∇( p + ) =
(B ⋅ ∇ )B
8π
4π
∂
B (r )
p(r ) + θ
∂r
8π
2
B(r )θ 2
+
=0
4
π
r
Jz
z
(21.15)
(21.16)
10
Infatti dato che :
J = Jzêz
1
J × B − ∇p = 0
c
4π
∇×B −
J=0
c
1
(J × B )r − (∇p )r = − 1 J z Bθ − ∂p = 0
c
c
∂r
(∇ × B )z − 4π J z = 1 ∂ (rBθ ) − 4π J z = 0
c
r ∂r
c
Eliminando J dalle due equazioni:
ossia:
∂p 1 Bθ ∂
(rBθ ) = 0
−
∂r 4π r ∂r
B
∂
p+ θ
∂r
8π
2
∇p
Bθ 2
+
4πr = 0
2
Bθ
dove, a differenza del caso precedente,
il
termine
1
πr
Z.3c
⋅ ( I.2 − I.1) ⋅ V − Z.0 ⋅ I4
.1 ⋅ I.2
è dovuto alla
presenza di una curvatura nelle lineeI di2 forza
.3
11
Instabilità di uno Z-pinch
Dal punto di vista sperimentale, la caratteristica
che più colpisce in un Z-pinch e la sua marcata
predilezione per piegarsi e storcersi, prima di
distruggersi.
Si tratta di una configurazione intrinsecamente
instabile. Una sua instabilità caratteristica è
quella detta ‘kink instability’.
Per darne una spiegazione intuitiva,
immaginiamo di dare alla colonna di fluido una
piccola deformazione del tipo di quella illustrata
in figura
ξ = ξ 0 (r )ei ( mθ − nz )
m= 1
Osserviamo che le linee di campo magnetico esterno Bθ si infittiscono nel lato concavo
della superficie incurvata, mentre sul lato convesso le linee sono diradate. Dove le linee
sono più fitte, il campo magnetico (e quindi la pressione magnetica) è più elevata;
perciò questo tipo di deformazione comporta la comparsa di forze che tendono ad
esaltare la deformazione stessa, da cui l'instabilità.
12
Un'altra instabilità caratteristica dello Z-pinch, molto affine come natura all'instabilità
'kink', ma con una geometria assi-simmetrica è la così detta 'instabilità a salsiccia'
('sausage instability' ).
Per darne una spiegazione intuitiva, in figura è mostrata la tipica perturbazione Dato
che il campo Bθ, prodotto dalla corrente, varia come l'inverso di r, la pressione
magnetica esterna che agisce sulla superficie del plasma si intensifica dove la
perturbazione produce una strozzatura nel plasma ed è più debole dove c'è un
rigonfiamento della colonna.
Anche in questo caso , la configurazione e’ instabile perchè non esiste alcuna forza
che si oppone all’ aumento dell’ ampiezza della perturbazione
13
Stabilizzazione
Perturbazioni di kink e di sausage in una configurazione del tipo Z-plnch possono essere stabilizzate
introducendo una componente di campo magnetico assiale facendo avvenire la scarica in uno spazio
dove pre-esiste un campo magnetico stazionario Bz diretto secondo lo asse z.
Questo campo assiale è ottenuto in pratica mediante una corrente che circola secondo θ in conduttori
esterni in un tempo molto più lungo del tempo di durata della scarica principale. Si può ottenére una
configurazione stabile (‘Z-pinch stabilizzato”), purché l'intensità di Bz sia scelta opportunamente
Per spiegare l'effetto stabilizzante, si deve tener conto del fatto
che il piasma si forma in presenza di un campo magnetico
preesistente, quindi :la compressione radiale dovuta alla
perturbazione, avviene in un plasma avente già nel suo interno
il campo magnetico diretto secondo z.
ξ = ξ 0 (r )ei ( mθ − nz )
m= 0
Questo campo magnetico 'intrappolato1 viene anche esso
intensificato per effetto della compressione radiale, che causa
un infittimento delle linee di campo Bz, che sono anch’ esse
congelate al fluido.
Esse pertanto subiranno una deformazione analoga, con un
aumento della tensione magnetica ad esse applicata, che
contrasta la diminuzione del raggio di curvatura locale.
Questo tende a riportare il sistema nella sua configurazione
originaria, cioè rettilinea.
a)
b)
Figura XVI-6
14
Equilibrio MHD di un Z-pinch
L’ equilibrio delle forze in un θ-pinch e’ meno semplice che in uno Z-pinch per la
presenza del termine di tensione dovuto alla curvatura delle linee di forza. Non e’ in
questo caso possibile scegliere p e J indipendentemente perché devono essere calcolati
in un modo auto consistente: si integra la (21.16) sul raggio occupato dal plasma:
a
a
2
2
Bθ (r ) 2 dr B(r ) 2
∂
Bθ (r ) B(r )θ
p(r ) +
+
=0
∫r 4π r + 8π + p(r ) = 0 (21.17)
∂r
8π
4πr
r
ottenendo per p(a)=0.
(
)
a
Bθ (r ) 2 dr
1
2
2
p (r ) =
Bθ (a ) − Bθ (r ) + ∫
8π
4π r
r
a
Assumendo un profilo radiale di corrente Jz = cost, dalla:
∂ (rBθ (r )) 2π
4π
1 ∂ (rBθ ) 4π
∇×B =
2
(
c
J
r
)
c
Jz
=
∂r
c
J zr
Bθ (r ) =
2πJ z 2 2 2πJ z
2πJ z
2
2
rdr
=
a
−
r
+
a
−
r
=
a2 − r 2
2
2
2
∫r
c
2c
c
2 a
J
J
p (r ) = z 2 a 2 − r 2 + z2
2c
c
∂r
=
(
)
2
(
)
2
(
)
π
c
J zr
(21.18)
per una densità di corrente costante il profilo è parabolico
15
In questa configurazione e’ la corrente stessa del plasma che crea il campo magnetico
di confinamento della scarica. Se si schematizza la situazione con un fluido cilindrico,
attraversato da una corrente che scorre parallelamente al suo asse, sotto l'azione della
forza J x B il plasma viene compresso (effetto pinch) in un filamento lungo l'asse del
cilindro e questa forza e’ equilibrata dal gradiente di pressione nel fluido.
Le superfici p = cost sono ancora cilindri concentrici, ma la pressione ora varia con il
raggio del cilindro. La pressione del plasma viene equilibrata dal campo magnetico
attraverso due meccanismi: per effetto della 'pressione magnetica', analogamente al
caso del θ-pinch, e per effetto della curvatura delle linee di campo. I due effetti
risultano in generale dello stesso ordine di grandezza.
Ancora nell’ ipotesi di una densita’ di corrente uniformemente distribuita sulla sezione del
fluido di raggio a ossia j = I/πa2, dal teorema della circuitazione, in ogni punto r < a:
4π
2πrB ( r ) =
I (r )
c
ossia
si ottiene
Sostituendo nella (XIII-48)
2 I (r )
B (r ) =
c r
B (r ) =
e
r2
I ( r ) = πr j = 2 I
a
2
2 I (r ) 2 r
=
I
c r
c a2
∂
B2
B2
(p+ )+
∂r
8π
4πr
∂p
2 I
=− r
∂r
π ca
2
i due termini di forza sono uguali e pari a (I/ca)2 r/π. Pertanto, come visto prima la
pressione magnetica cresce verso l’ asse del cilindro con il quadrato del raggio (profilo
parabolico).
16
∂
B (r )
p(r ) + θ
∂r
8π
2
La condizione di equilibrio
dp
1 B d
=−
⋅ (rB)
4π r dr
dr
B(r )θ 2
+
=0
4
r
π
può essere riscritta come:
B d
dB B 2
(rB ) = B +
r dr
dr
r
Infatti :
B (r ) =
2 I (r )
c r
Moltiplicando per r2 ed integrando fra 0 ed il raggio del plasma a, otteniamo:
a
2
∫r
0
dp
1 a
dr = − ∫ (rB )d (rB )
dr
4π 0
2
[r p] −
4π
2
a
0
a
1
∫ prdr = − 2π [r
2
B 2 ]0a
0
Se assumiamo che la pressione di plasma vada a zero alla superficie di contorno r = a,
questa relazione diventa :
a
∫ prdr = B
2
(a ) ⋅ πa 2
(21.19)
0
Se assumiamo anche gli ioni e gli elettroni abbiamo temperature costanti nella sezione del
pinch (Ti e Te ):
p (r ) = n(r ) ⋅ K (Te + Ti )
(21.20)
17
Relazione di Bennet
Introduciamo il numero totale di elettroni per unità di lunghezza della colonna di plasma ('densità
lineare'):
a
N = 2π ∫ n(r )rdr
(21.21)
0
ed otteniamo :
a
a2 2
N ⋅ K (Te + Ti ) = 2π ∫ p(r )rdr = B (a)
2
0
B(a) è legato alla corrente I dal teorema della circuitazione dalla relazione
2I
B(a) =
ca
2 I (r )
B (r ) =
c r
(21.22)
per cui otteniamo la relazione (di Bennett):
N ⋅ k (Te + Ti ) =
2 2
I
c2
(21.23)
Questa relazione mostra che in uno Z-pinch la temperatura del plasma è proporzionale al
quadrato della corrente della scarica ed è inversamente proporzionale alla 'densità lineare'.
Introducendo la 'pressione media‘ e il parametro 'beta-theta‘ :
18
Sistemi di confinamento lineari : Screw− pinch
La stabilizzazione dello Z-pinch conduce al sistema di
confinamento magnetico Screw-pinch in cui, come si è
detto, alla componente puramente azimutale del
campo magnetico Bθ e’ aggiunta, una componente
assiale Bz generata da bobine esterne. Il risultato e’
che le linee di forza del campo hanno un andamento
elicoidale attorno all’ asse con un’ equazione:
rdϑ Bϑ (r )
=
dz
Bz ( r )
(21.24)
La modifica fu introdotta principalmente per ottenere
un miglioramento nella stabilita’ della configurazione
magnetica. Essa tuttavia introduce all’ uso di campi di
confinameno elicoidali, che sono necessari in
geometria toroidale
Nel caso dello Screw Pinch l’ aggiunta della
componente di campo Bz e’ ottenuta imponendo alla
densita’ di corrente con una componente jθ (ad
esempio inserendo il tubo di scarica in un solenoide
coassiale)
19
Le condizioni di equilibrio di uno Screw-pinch si calcolano nello stesso modo,
tenedo conto che ora il campo magnetico ha anche una componente assiale
(componenti jθ e Bz )
J = Jzeˆ
B = Bθēθ + Bzēz
(21.25)
1
J × B − ∇p = 0
c
∇×B −
4π
J=0
c
1
(J × B )r − (∇p )r = 0
c
(∇ × B )z − 4π
1
(Jθ Bz − J z Bθ ) − ∂p = 0
c
∂r
1 ∂
(rBθ ) − 4π J z = 0
r ∂r
c
∂Bz 4π
−
Jϑ = 0
∂r
c
Jz = 0
c
(∇ × B )θ − 4π Jθ = 0
c
(21.26)
(21.27)
(21.28)
Eliminando J dalle tre equazioni:
∂p 1 Bθ ∂
(rBθ ) + 1 Bz = 0
+
8π r
∂r 4π r ∂r
2
(21.29)
ossia:
∂
B 2 Bθ
p+
+
=0
∂r
8π 4πr
2
1 Bθ ∂
(rBθ )
4π r ∂r
dove, a differenza del caso precedente, il termine
(dovuto alla
2
presenza di una curvatura nelle linee di forza) è destabilizzante e 1 Bz
che
8π r
fornisce la forza stabilizzante
20
Sistemi toroidali assisimmetrici
In un sistema toroidale le linee di forza elicoidali
hanno equazione
rdθ Rdφ
=
BP
BT
(21.30)
dove R= R0 + r cos(θ) e’ la distanza del punto P
dall’asse del toro, BP. e BT. sono le componenti
poloidale e toroidale del campo magnetico,
R
La “trasformata rotazionale” e’ definita come:
ι=
R BP 1
=
r BT q
(21.31)
Dove q e’ il “fattore di sicurezza” In generale ι
varia al variare di r (dι/dr = 0). In questo caso si
dice che le linee di forza hanno uno 'shear'
(torsione) finito.
21
Confinamento magnetico toroidale assisimmetrico
Per capire come l’ introduzione di un campo
z
poloidale possa compensare la deriva
verticale che è responsabile della
separazione di carica verticale si consideri
una superficie di flusso su cui le linee di forza
compiono un giro completo in direzione
poloidale durante una rotazione toroidale.
∇B
drift
In assenza di deriva verticale, una particella
girerebbe senza abbandonare la linea di
forza secondo la traiettoria 1-2-3-4 mostrata
in proiezione su una sezione trasversale del
toro e si ritroverebbe al punto di partenza
rimanendo pertanto confinata.
Nel caso di deriva verticale verso l’ alto, la particella segue il percorso 1-2’-3’ nella prima
mezza orbita, passando su una diversa superficie magnetica come e’ mostrato in figura.
Tuttavia, nella seconda parte del cammino, la struttura elicoidale della linea di forza guida la
particella nella meta’ inferiore del toro. Pertanto la deriva verticale produce l’ effetto opposto
sulla seconda meta’ della traiettoria, e riconduce la particella nel punto di partenza (con il
percorso 3’-4’-1). La traiettoria della particella e’ pertanto confinata.
22