DISPENSA :TRASDUTTORI E CONDIZIONAMENTO DEL SEGNALE
PROF. DI PASQUO RICCARDO
INDICE ................................................................................................................. 1
UNITÀ DIDATTICA (premessa, prerequisiti, obiettivi, metodologia) .................... 2
CONSIDERAZIONI GENERALI ................................................................................... 4
TRASDUTTORI: CLASSIFICAZIONE E CARATTERISTICHE ........................................... 5
TRASDUTTORI PRIMARI ......................................................................................... 14
TRASDUTTORI DI TEMPERATURA .......................................................................... 14
TRASDUTTORI FOTOELETTRICI.............................................................................. 22
TRASDUTTORI ESTENSIMETRICI ............................................................................ 24
TRASDUTTORI DI POSIZIONE ................................................................................. 26
CONDIZIONAMENTO DEL SEGNALE ....................................................................... 28
TECNICHE DI CONVERSIONE V/I, I/V .................................................................... 30
EFFETTI DELL’IMPEDENZA DI USCITA DEI TRASDUTTORI ....................................... 35
AMPLIFICATORE DI STRUMENTAZIONE (INA) ...................................................... 38
BIBLIOGRAFIA E SITOGRAFIA ................................................................................ 40
DATA SHEETS ....................................................................................................... 41
CONSIDERAZIONI GENERALI
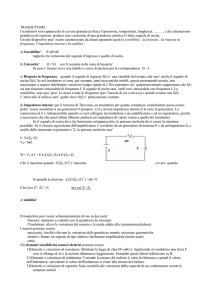
Introduzione
Il sistema di acquisizione dati si occupa di prelevare, di solito, un segnale analogico fornito da un
trasduttore e di trasformarlo in un segnale digitale da trasferire all’elaboratore, che provvede poi
a elaborarlo e distribuirlo ai dispositivi previsti, ad esempio ai display o agli attuatori.
Le applicazioni sono infinite e vanno dal semplice monitoraggio di una grandezza fisica al
controllo e monitoraggio di moltissimi segnali nei processi più complessi. Ovviamente il costo di
sistemi di acquisizione dipende dalla precisione e dall’affidabilità che si desidera realizzare.
Sensore
Trasduttore
Condizionamento
Conver.
A/D
Elaborazione Dati
Display
Dati
Conver.
Grandezza fisica
Dati
Uscita di
controllo
Attuatore
Figura1: sistema di acquisizione
I blocchi funzionali relativi al trasduttore e al condizionamento del segnale saranno l’oggetto
della dispensa.
Lo sviluppo della tecnologia di integrazione e l’uso sempre più massiccio di sensori a
semiconduttore ha reso possibile l’integrazione in un solo componente, detto smart
transducer/sensor, dell’elemento sensibile, dei circuiti che realizzano il condizionamento e la
conversione analogico-digitale del segnale e dei circuiti che consentono il controllo della
trasmissione digitale, rendendo di fatto obsoleta l’architettura con trasmissione analogica.
La finalità di questa dispensa non è certo dare delle conoscenze e competenze su tutti i tipi di
trasduttori e circuiti di condizionamento, visto i moltissimi campi di applicazione, ma di limitarci
1
a considerazioni fondamentali, con particolare attenzione a quelli che si possono riscontrare in
esperienze di laboratorio scolastico e che meglio si prestano a soluzioni circuitali
elettronicamente significative.
TRASDUTTORI : CLASSIFICAZIONE E CARATTERISTICHE
Considerazioni generali
Le grandezze fisiche da rilevare nei processi industriali possono essere di varia natura;
generalmente queste quantità sono difficili da trasmettere e da elaborare nella loro forma
originaria.
Di conseguenza, l’obiettivo fondamentale di un sensore/trasduttore è quello di convertire una
grandezza fisica in ingresso in un’altra grandezza più facile da manipolare.
Una peculiarità del processo di trasduzione è la conversione dell’energia da una forma (in
ingresso) ad un’altra (in uscita).
Distinzione fra sensore e trasduttore
• Sensore: Il sensore è l’elemento sensibile che converte la grandezza fisica in ingresso in una
grandezza fisica in uscita facilmente acquisibile per via elettrica.
• Trasduttore: il dispositivo nel suo complesso, che trasforma la grandezza fisica da misurare in
un segnale di natura elettrica.
Figura 2: trasduttore e sensore
In molti casi la distinzione tra sensore e trasduttore non è così netta e delineata e molto spesso
nella letteratura tecnica e nella pratica comune i due termini sono utilizzati come sinonimi.
Trasduttore e sensore sono “equivalenti” (sensore mette l’accento sulla componente sensibile,
trasduttore sul circuito nel complesso in grado di tradurre il segnale).
I trasduttori misurano le grandezze fisiche che possiamo distinguere in :
2
•
•
Grandezze continue, che possono assumere valori continui all’interno di un certo intervallo
(es. temperatura di un utensile, velocità di rotazione di un motore, ecc...).
Grandezze discrete, che assumo un insieme discreto di valori (es. verso di rotazione di un
motore, numero di pezzi lavorati al minuto, ecc...).
Le informazioni associate alle grandezze fisiche sono dette segnali. Le grandezze continue sono
descritte da segnali analogici, grandezze discrete sono descritte da segnali codificati oppure da
segnali logici.
I trasduttori di tipo elettrico (forniscono l’uscita di tipo elettrica, esistono anche quelli
pneumatici), rispettano le norme ANSI e DIN secondo le seguenti specifiche:
Segnale in corrente : da 0 a 20mA oppure da 4 a 20mA
Segnale in tensione : da 0 a 5V
oppure da 0 a 10V
In relazione alle specifiche esigenze del sistema in cui agiscono, possono essere elaborati
ulteriormente. (Es. pilotaggio di dispositivi di potenza).
Classificazione dei trasduttori
La classificazione dei trasduttori può essere fatta in vari modi fra loro alternativi (principio
fisico, grandezza da misurare, settore di destinazione, necessità di alimentazione esterna, tipo di
segnale di uscita (analogico-digitale).). Ognuno di essi si adatta a esigenze diverse e mette in
evidenzia alcune caratteristiche. Una distinzione utile può essere quella tra trasduttori primari e
secondari. Quest’ultimi sono in qualche modo riconducibile ai primari, cioè le misure che
effettuano sono deducibili dalla misura di altre grandezze fisiche, che sono quelle rilevate dai
trasduttori primari.
Tra i trasduttori primari consideriamo quelli:
• di temperatura
• fotoelettrici
• estensimetrici (o piezometrici)
• di campo magnetico
• elettrochimico.
Tra quelli secondari:
• quelli di forza, di accelerazione, di pressione, basati sui sensori estensimetrici
• quelli di posizione che utilizzano sensori fotoelettrici, di campo magnetico e capacitivi
• di velocità, che derivano in genere da quelli di posizione.
Specifiche sulle funzionalità dei trasduttori
I principali parametri, forniti generalmente dalle case costruttrici, di un trasduttore sono da
ricercarsi nelle seguenti caratteristiche:
1. Caratteristica statica;
2. Caratteristica dinamica;
3. Dipendenza da variabili ambientali;
4. Affidabilità.
3
1. La caratteristica statica si ottiene variando molto lentamente la variabile di ingresso del
sensore e registrando la corrispondente variabile di uscita. Più precisamente per
variazioni di ingresso lente rispetto al tempo di risposta del trasduttore. La relazione tra
ingresso I e uscita O(I) è rappresentabile da una curva detta transcaratteristica.
Idealmente la caratteristica ingresso/uscita di un trasduttore è quella in figura.
Caratteristica statica ideale
O
Grandezza di uscita
Caratteristica ideale
Fattore di conversione
G
Grandezza di ingresso
I
Figura 3: caratteristica ideale
I trasduttori commerciali hanno però una caratteristica statica reale che si differenzia da quella
ideale a causa di inevitabili imperfezioni costruttive. La qualità di un sensore si misura in base a
quanto la caratteristica reale si scosta da quella ideale. I costruttori di trasduttori forniscono
alcuni indici/parametri che misurano la qualità del sensore.
•
Errore di Linearità (linearity error). È lo scostamento relativo della caratteristica reale
rispetto alla caratteristica ideale, mentre ΔO é il massimo scostamento dalla caratteristica
ideale.
4
O
Caratteristica reale
Grandezza di uscita
OM
Retta che approssima la
Caratteristica ideale
ΔO
Om
Grandezza di ingresso
I
Figura 4: caratteristica reale
La caratteristica di un trasduttore di precisione deve essere lineare per ottenere una
variazione della grandezza di uscita direttamente proporzionale a quella di ingresso. In
genere la caratteristica lineare è presente solo in una fascia ristretta di valori, quindi è
opportuno far lavorare il trasduttore solo nel tratto lineare, riducendo cioè il campo di
funzionamento. (differenza tra il valore max e min che può assumere la grandezza di
ingresso).
O
Caratteristica reale
Grandezza di uscita
Retta che approssima la
caratteristica ideale
ΔO
Campo di funzionamento
Imin
Imax
I
Grandezza di ingresso
Figura 5: campo di funzionamento
5
•
Errore di fuori zero (offset error). É il valore che assume l’uscita del trasduttore
quando la grandezza da misurare è nulla.
O
Grandezza di uscita
Caratteristica reale
Offset
Grandezza di ingresso
I
Figura 6: offset
•
Errore di guadagno EG (gain error). È la differenza tra la pendenza della caratteristica
ideale del trasduttore e la pendenza della retta reale che approssima al meglio la
caratteristica ideale del trasduttore.
O
Caratteristica reale
Grandezza di uscita
EG
Caratteristica ideale
Offset
Is
I
Grandezza di ingresso
Figura 7: errore di guadagno
6
•
Risoluzione. È la minima variazione della grandezza d’ingresso in grado di provocare
una variazione percettibile su quella d’uscita. Se la risoluzione è riferita alla sola
grandezza di uscita, esprime il rapporto formulato in percentuale tra la minima variazione
della grandezza di uscita e il valore di fondo scala (max ingresso misurabile). Un buon
trasduttore presenta una risoluzione molto bassa. Risoluzione%=(ΔO/Ofs)*100.
•
Isteresi. Si parla di isteresi quando la caratteristica del trasduttore è differente nei casi in
cui il segnale di ingresso sia in crescita e quello in cui il sistema sia in diminuzione.
L’errore di isteresi è la massima differenza tra le uscite nei due casi.
O
Grandezza di uscita
Caratteristica con segnale
decrescente
Caratteristica con
segnale crescente
Grandezza di ingresso
I
Figura 8: isteresi
•
Sensibilità. È il rapporto tra la variazione della grandezza d’uscita ΔO (presumibilmente
grande) e la variazione di quella di ingresso ΔI che la provoca (possibilmente piccola).
Per trasduttori con caratteristica ingresso/uscita lineare la sensibilità è: S= ΔO/ ΔI. Un
buon trasduttore deve avere una grande sensibilità che si ha con una caratteristica lineare
che ha una pendenza maggiore.
7
O
Caratteristica ideale con maggiore sensibilità
Grandezza di uscita
Caratteristica ideale
Maggior escursione
Grandezza di ingresso
I
Figura 9: sensibilità
•
Precisione (precision, repeatability). È una misura di quanto l’uscita del sensore è
ripetibile su ripetuti esperimenti. In sostanza può accadere che ripetendo lo stesso
esperimento più volte il sensore non fornisca l’identico risultato.
•
Accuratezza (Accuracy). È una misura di quanto l’uscita del trasduttore si scosta da
quello che dovrebbe essere la sua uscita ideale, cioè quella uscita che avrebbe un
trasduttore ideale che misura la stessa grandezza di quello reale.
Precisione e Accuratezza a confronto
Figura 10: esempio del bersaglio
8
2. Caratteristica dinamica. Quando la variabile di ingresso varia molto velocemente il
trasduttore può assumere un comportamento dinamico, cioè la variabile di uscita introduce un
certo ritardo ed una certa attenuazione alla caratteristica statica. È quindi chiaro che la
caratteristica dinamica del trasduttore pone un limite alla banda passante di tutto il sistema di
controllo. É possibile analizzare il comportamento dinamico in vari modi:
• Analisi nel dominio del tempo. I parametri che definiscono il comportamento
dinamico del sistema, dato in ingresso a gradino, sono :
1. Tempo di risposta: (il più importante a volte è detto anche costante di tempo del
trasduttore) intervallo di tempo fra l’istante in cui ha inizio il gradino del misurando e
l’istante in cui l’uscita supera per la prima volta una determinata frazione del valore a
regime (in genere il 50%).
2. Tempo di salita: intervallo di tempo affinché l’uscita si porti dal 10% al 90% del valore
a regime.
3. Tempo di assestamento: intervallo di tempo fra l’istante in cui ha inizio il gradino del
misurando e l’istante in cui l’uscita entra definitivamente in una fascia di valore intorno
al valore di regime ( in genere ±5%).
4. Tempo morto: intervallo di tempo fra l’istante in cui ha inizio il gradino del misurando
e l’istante in cui l’uscita supera un determinato valore di soglia al di sotto della quale
viene considerata nulla.
5. Sovraelongazione: differenza tra il valore massimo raggiunto dall’uscita e il valore a
regime.
6. Frequenza delle oscillazioni di assestamento: frequenza delle oscillazioni smorzate che
si verificano quando il sistema è sottosmorzato.
7. Fattore di smorzamento: nel caso di sistema sottosmorzato è il rapporto fra l’ampiezza
della minore e della maggiore tra due sovraelongazioni successive, nell’ipotesi che tale
rapporto sia indipendente dalla coppia di sovraelongazioni considerate.
Figura 11: risposta al gradino
• Analisi nel dominio delle frequenze: Il parametro fondamentale che caratterizza il
sensore è la banda passante ωo. La dinamica del trasduttore non sempre può essere
trascurata in fase di progetto di un anello di controllo.
9
Figura 12: caratteristica dinamica di un trasduttore ideale; risposta in frequenza (modulo)
• La risposta frequenziale di un trasduttore si definisce attraverso i diagrammi di
ampiezza e di fase della risposta del trasduttore quando l’ingresso ha un andamento
sinusoidale.
• Quando la sinusoide di ingresso ha una pulsazione maggiore di un valore limite, allora
l’uscita incomincia a non essere più in grado di seguire l’ingresso. Tale valore prende il
nome di pulsazione di taglio (ωo) del trasduttore.
3. Dipendenza da variabili ambientali. Il trasduttore è progettato per rilevare una certa
grandezza fisica, tuttavia risulta molto difficile costruire un dispositivo selettivo che non risulti
influenzato da altre grandezze fisiche. Ad esempio la temperatura influenza le caratteristiche
fisiche di quasi tutti i materiali, ed in particolare quelli a semiconduttore e i disturbi di natura
elettromagnetica (interferenza).
4. Affidabilità. L’affidabilità del trasduttore è di fondamentale importanza per il corretto
funzionamento di un sistema di misurazione e controllo. L’affidabilità si misura in senso
statistico fornendo il tempo medio che precede un guasto del dispositivo (Mean Time Between
Failure MTBF).
I parametri che riguardano l’affidabilità sono:
• Vita operativa: minimo intervallo di tempo in cui si garantisce che il sensore funzionerà
secondo le specifiche indicate (ad es. sensibilità, offset, isteresi, ecc.)
• Numero di cicli: minimo numero di escursioni dell’ingresso (entro il F.S.), nel quale è
garantito il funzionamento secondo le specifiche indicate.
10
TRASDUTTORI PRIMARI
Vengono trattati solo alcuni tipi di trasduttori primari, che in qualche modo sono fondamentali e
alla base di molti altri trasduttori secondari.
TRASDUTTORI DI TEMPERATURA
I sensori basano il proprio funzionamento sulle leggi naturali che regolano il rapporto fra le
grandezze fisiche. Quindi per poter progettare un sensore che riveli una certa grandezza fisica
occorre conoscere la natura fisica che regola il rapporto tra tale grandezza e la grandezza di
uscita del sensore. In particolare alcuni sensori di temperatura, che in questa sede vengono
analizzati più in dettaglio di altri trasduttori, convertono la grandezza da misurare (temperatura)
in una variazione di resistenza del materiale di cui sono fatti. Sono i sensori (resistivi) di
temperatura la cui resistenza elettrica di un materiale può essere espressa come: R = ρ l /A, dove
ρ è la resistività del materiale (solitamente dipendente dalla temperatura), l ed A sono la
lunghezza e la sezione trasversale del materiale.
La variazione di resistenza può essere prodotta da:
• variazione di geometria;
• variazioni di resistività (termistori) o conduttività (fotoresistori);
Il controllo e la misura della temperatura è di fondamentale importanza in moltissimi processi
industriali. Si analizziamo i principali (che possono avere una certa utilità didattica) trasduttori di
temperatura:
• termoresistenze
• termocoppie
• termistori
• trasduttori integrati
Termoresistenze
La termoresisistenza o RTD (Resistance Temperature Detector, rilevatore di temperatura a
resistenza) è un trasduttore a variazione di resistenza, costruito con materiali anti-induttivi come
il platino, nichel, rame.
In questi trasduttori la resistenza cresce al crescere della temperatura. (la conducibilità nei
conduttori decresce all’aumentare della temperatura). La dipendenza tra resistenza e temperatura
è : R(T ) = R(0) * (1 + αT ) dove R(0) è il valore nominale della resistenza a 0 C°, T è la
temperatura in C°, α un coefficiente positivo misurato in C°-1 . In realtà la dipendenza tra
resistenza e temperatura non è lineare, ma per il range di funzionamento previsto la consideriamo
tale. Inoltre i termini di ordine superiore presentano dei coefficienti piccolissimi che sotto
opportune condizioni (non troppo lontani dallo 0 C°) possono essere trascurati. La sensibilità è
dR(T )
data dalla derivata della caratteristica è S =
= αR(0) .
dT
Le termoresisistenze presentano buona precisione e stabilità nel tempo, hanno un ampio range di
ingresso (-10 / +600 c°) e ottime caratteristiche di linearità. I principale difetto è che hanno una
bassa sensibilità per cui necessitano di forti amplificazioni. Per farle funzionare occorre far
scorrere la corrente il che da problemi di riscaldamento (effetto joule) che determinato un
11
decadimento della precisione. La termoresistenza viene collegata all’esterno mediante un cavo
schermato e normalmente inserita in un apposito involucro che protegge l’elemento sensibile.
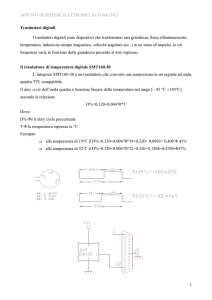
In commercio vi sono termoresistenze dette Pt 100, ovvero quelle costituite da trasduttori di
temperatura che , utilizzando il platino, sono realizzati in modo che alla temperatura di 0°C
presentano una resistenza di 100Ω.
Essi sono impiegate in un campo di temperatura compreso tra -200°Ce850°C.
R(T)/R(0)
Resistenza relativa
6
Nichel
4
Rame
Platino
2
300
600
T [C°]
Temperatura
Figura13: variazione di resistenza in alcuni metalli
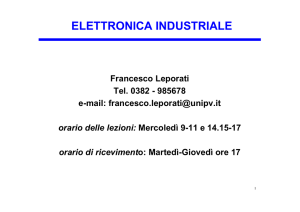
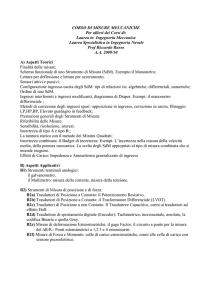
Applicazione proposta
Uso del sensore Pt100 che misura la temperatura tra 0÷300°C con uscita tra 0÷10V
220uF
Pt100
4,7k
1,8k
470k
5
V0
7
+
+
5
6
7
-
6
0,5M
1,8k
4,7k
47k
+Vcc
In
O
78L05
C3
220-330uF
C2
10-47uF
100 lin
Figura 14: misura temperatura
12
La tensione di riferimento è pari a 5V. Per evitare fenomeni di autoriscaldamento si limita (ad un basso valore) la
corrente nella termoresistenza ad un valore I=2,5mA. La resistenza nominale del Pt100 è R=100Ω a 0°C. Dal
circuito si ha:
R0 =
VR
− R = 1,9kΩ ≅ 1,8kΩ
I
Ricordando la Vo dal ponte resistivo linearizzato (vedi paragrafo successivo), si ha che l’uscita del primo stadio V01
per uno scostamento ΔT dall’inizio scala :
V01 = −
αR∆T
∆R
VR = −
VR
R0 + R
R0 + R
(si considera la termoresistenza lineare).
Dalle specifiche di progetto ΔT=300°C ed essendo α= 3,85 ⋅ 10
−3
C°-1
V01 (300°C ) ≈ −60,79mV
Per avere in uscita alla catena di condizionamento V0 (300°C ) = 10V dobbiamo inserire uno stadio finale
invertente con guadagno:
Av =
10
V0 (300°C )
=−
= −164,5
60,79 ⋅ 10− 3
V0 (300°C )
Si può scegliere Rs=4,7kΩ e Rf=4,7k·164,5≈773kΩ
Osservazioni:
• La scelta di una tensione di riferimento positiva è legata al fatto di avere uno stadio finale invertente in modo
da ottenere in uscita una tensione positiva.
• Rendendo variabile il resistore da 100Ω che deve bilanciare il Pt100 a 0°C, possiamo regolare lo zero della
scala. Tale operazione va fatta prima di quella del guadagno perché il trimmer da 100Ω influenza il guadagno
del 1à stadio e quindi di tutto il sistema.
• Accorgimenti utili per il buon funzionamento sono: la resistenza di compensazione dell’offset in serie
all’ingresso non invertente del 2° operazionale; il condensatore il parallelo alla resistenza di retroazione del
2°stadio che limita la banda passante a circa 0,9Hz, che riduce i disturbi dei campi elettromagnetici in
particolare quello della rete elettrica.
• Per gli operazionali si fa uso del LM324 (4 O.A.) con una tensione di alimentazione di ±12V.
Termocoppie
Sono trasduttori di temperatura il cui principio di funzionamento e’ basato sull’effetto Seebeck.
(un conduttore elettrico sottoposto ad un gradiente termico genera una differenza di potenziale).
Ciò consiste nel fatto che in una coppia di materiali differenti, saldati ad una estremità, si
manifesta, tra le estremità libere, una differenza di potenziale che dipende sia dai materiali a
contatto che dalla temperatura a cui si trova la giunzione.
Figura 15: Effetto Seebeck in una termocoppia
13
Una termocoppia è costituita da una coppia di conduttori elettrici di diverso materiale uniti tra
loro in due punti distinti, convenzionalmente denominati giunzione fredda e giunzione calda. È
possibile risalire alla differenza di temperatura esistente tra questi due punti misurando la
differenza di potenziale presente fra gli stessi. Se, anziché la differenza di temperatura, occorra
misurare la temperatura assoluta, una giunzione è mantenuta ad una temperatura fissa e nota.
Essa prende allora il nome di giunzione di riferimento, mentre l'altra è la giunzione di misura.
La termocoppia e’ un dispositivo attivo, cioè che genera autonomamente una tensione senza la
necessità di ricorrere a circuiti elettronici del tipo adottato ad esempio per le termoresistenze; il
vantaggio consiste nell’eliminare i problemi di autoriscaldamento verificatosi nelle
termoresistenze. Le termocoppie misurano temperature elevate fino a 1500°C ed oltre.
La termocoppia è un sensore di temperatura largamente diffuso. In particolare le termocoppie
sono ampiamente utilizzate perché economiche, facilmente sostituibili, standardizzate e possono
misurare un ampio intervallo di temperature. Il loro limite più grande è l'accuratezza, infatti
errori sistematici minori di un grado centigrado sono difficili da ottenere.
Resistori NTC e PTC
I Resistori NTC o termistori si possono realizzare con materiali semiconduttori unipolari. La
conduttività di un semiconduttore puro ha coefficiente negativo (resistori NTC = Negative
Temperature Coefficient). Quindi al crescere della temperatura diminuisce la resistenza.
La resistenza in fuzione della temperatura varia secondo la legge : R (T ) = R (To )e
B(
1 1
− )
T To
dove T è la temperatura assoluta in K, To una temperatura assoluta di riferimento (solitamente
298K=20°C) e B una costante del materiale(2000K<B<5500K).
Tra le caratteristiche positive dei termistori vi è la sensibilità; (presentano un’alta variazione di
resistenza per unità di temperatura). Il Difetto principale è che la caratteristica R(T) è
pesantemente non lineare se non su intervalli di temperatura molto piccoli. Vengono quindi
utilizzati per applicazioni dove la linearità non è molto importante (come in controlli di
temperatura) e per misure di range ristretti (termometria clinica poiché il range utile è qualche
decina di gradi). Oppure si ricorre a reti di compensazione della non linearità.
È possibile realizzare anche resistori PTC (Positive Temperature Coefficient), ovvero
semiconduttori fortemente drogati possono presentare un coefficiente di variazione positivo
(come quello delle termoresistenze). I resistori PTC presentano una sensibilità maggiore rispetto
alle termoresistenze metalliche, ma non meno lineari. (es. KTY10 della Infineon lavora tra i –50
e i 150 c°). In definitiva nei termistori PTC la resistenza e’ direttamente proporzionale alla
temperatura, mentre, al contrario, nei termistori NTC la resistenza e’ inversamente proporzionale
alla temperatura. In pratica si posizionano all’interno dell’apparecchio da proteggere e vengono
utilizzati principalmente come protezione di macchine contro le sovratemperature o
sovracorrenti. Anche in questo caso occorrono circuiti di alimentazione con conseguenti effetti di
autoriscaldamento del trasduttore.
14
Applicazione proposta: Sistema di controllo di temperatura di tipo ON/PFF.
Il termistore NTC K22 della Siemens ha le seguenti caratteristiche:
R=10kΩ; B=3950 K ; P(25°C)=150mW.
Il led simula il funzionamento di una ventola e si accende quando T>50°C(ventola attiva).
V1
12Vdc
R2
10k
NTC K22
10k
V2
R3
1
+
3
-
2
1k
6Vrif
R1
2.84k
D1
Figura16: schema sistema di controllo temperatura
Per l’operazionale si consiglia di utilizzare l’integrato LM331 che contiene un comparatore di segnali analogici ed
un transistor sull’uscita dell’OA. Vedi data sheets per ulteriori specifiche.
Utilizzando la formula
T[°C]
0
R(T)[kΩ] 26.7
R(T ) = R(To )e
1 1
B( − )
T To
si può ricavare la seguente tabella:
10
20
30
40
50
60
70
16.6
10
6.4
4.2
2.84
1.98
1.39
La tabella evidenzia che la resistenza NTC assume valore di 2,84kΩ quando t=50°C.
All’aumentare della T la resistenza diminuisce. Per T=50°C si ha che R(T)=2,84kΩ e V(NTC)>Vrif. A questo punto
si accende la ventola(led).
Sensori di temperatura a giunzione semiconduttrice
Se in una giunzione PN polarizzata direttamente la corrente è mantenuta costante, la diminuzione
di tensione è lineare nella temperatura su un range molto ampio. In altre parole, in un diodo,
fermi i presupposti precedenti, la tensione diminuisce in maniera lineare all’aumentare della
∂Vd
temperatura. Nel silicio ad esempio si ha:
= −2.5mV /°C.
∂T Id =cos t
Se si volessero usare dei diodi tipo 1N914 o 1N4148 sarebbero degli ottimi sensori di
temperatura poiché, avendo una piccola massa hanno una capacità termica piccola, quindi alta
velocità di risposta e non influenzano l’ambiente di misura. Il difetto sta nella scarsa
riproducibilità poiché non essendo espressamente progettato come trasduttore, ogni esemplare
deve avere una taratura specifica.
Sensori di temperatura integrati
I trasduttori integrati sono circuiti integrati che presentano numerosi vantaggi di precisione,
affidabilità, bassa dissipazione di potenza e dimensioni. A seconda dei tipi, l’uscita può essere
una tensione oppure una corrente. Tra i più utilizzati ed economici vi sono AD590 e LM35.
15
Il principio di funzionamento è quello per cui in una giunzione PN( di solito BE del BJT)
polarizzata direttamente, la caduta di tensione dipende dalla temperatura. Al loro interno oltre il
sensore hanno anche il circuito di amplificazione e di condizionamento del segnale.
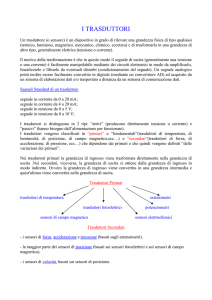
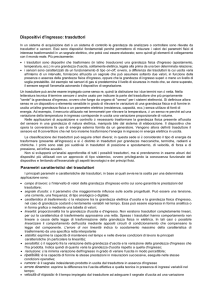
Specifiche sull’ Analog Device AD590
E’ un trasduttore di temperatura che si comporta come un generatore di corrente ad alta
impedenza. La corrente è proporzionale alla temperatura assoluta : I = k * T (T in gradi K).
La constante di proporzionalità K ha valore nominale di 1µA / K . Quindi la corrente in µA
coincide numericamente, entro il limite di errore, con la temperatura in Kelvin.
Il campo di misura si estende da -55°C (218 K) a +150°C (423 K), ed una tensione di
alimentazione di 4÷30V.
Il funzionamento in corrente presenta il vantaggio di rendere il sistema di misura insensibile alle
cadute di tensione, permette quindi di tenere il sensore lontano dall’apparato di misura. Per
ulteriori informazioni e per le connessioni guardare il data sheet in allegato.
I (μA)
Iout (μA)
+150°C
423
423
+25°C
298
298
218
218
-55°C
Vcc
1
3
30
218K/-55°C
423K/150°C
T
Figura17: AD590 transcaratteristica
La caratteristica di avere una piccola massa quindi una capacità termica piccola, porta ad avere
velocità di risposta abbastanza elevata con una costante di tempo termica in aria ferma di circa
60s.
Le principali cause di imprecisione sono : errore di scala (k differisce dal valore nominale) e
errore di offset. L’errore di scala in parte si può compensare agendo sul guadagno del sistema di
condizionamento del segnale, anche l’errore di offset si può compensare. Quindi l’AD590 risulta
un buon trasduttore con un errore di non-linearità contenuto(dell’ordine di ±0.8°C).
16
Applicazione da laboratorio
Il trasduttore in questione ha come grandezza elettrica di uscita la corrente. Per trasformarla in tensione basterebbe
una resistenza, ma si utilizzano convertitori corrente-tensione (per chiarimenti si rimanda al paragrafo relativo il
condizionamento del segnale).
C1 poliestere
R2
-Vcc
1uF
P2
AD590
+
6
3
1
V0
V0
P1
5k
+
IR
<--
+
-
2
AD590
7
+
R1
15k
5
-V
-
50k
82k
R2
I
<
<---
-
-
R1
R3
15k
+Vcc
78L05
VR
C3
220-330uF
C2
10-47uF
Fig a)
Fig b)
Figura 18: circuito per l’uso dell’AD590
Si vuole una tensione di uscita variabile 0÷10V per una temperatura che varia tra 0÷100°C.
Considerando che a 0 °C il dispositivo eroga una corrente di Ir=273µA, poiché 0 °C corrispondono a 273 K. E’
necessario quindi togliere la corrente Ir =273µA dalla corrente Is generata dal sensore (basta farle convergere con
versi opposti nel nodo di ingresso invertente dell’operazionale ). Quindi si ha:
I = I S (T ) − I R
Da cui :
I=
V0
Vr
= Is(T ) −
R2
R1
Vo
R2
IR =
⇒ R2 = ( Is(T ) −
VR
R1
VR
)
R1
D’altra parte:
∆VO
10V
=
= 0,1V / °C
∆T 100°c
Da cui:
R2 =
1 ∆VO
0,1V / °C
*
= −6
= 100 KΩ
K ∆T 10 A / °C
(prendiamo R2 =82kΩ+ trimmer multigiri da 50kΩ)
A 0°C si ha:
Is(0°C)=273µA
⇒
VR
= 273µA
R1
17
A 0°C per avere un’uscita di 0V deve essere Ir=Is (con Vr>0). Vr deve essere stabilizzata, perché una sua variazione
ΔVr determina una variazione della corrente in R1pari a ΔIr=ΔVr/R1;Poiché Ir=k·273µA l’errore sullo zero di
temperatura è dato da:
∆V
k∆T 0 ∆Vr
=
⇒ ∆T 0 = R 273 che si ripercuote su tuta la scala.
Vr
k 273
Vr
Se ΔVr/Vr =±1% l’errore di temperatura ΔT0=±2,73K=±2,73°C, che non è accettabile perché al di sotto della
precisione intrinseca del sensore.
Per stabilizzare Vr in genere si usa uno stabilizzatore integrato di bassa potenza 78L05 che fornisce una tensione di
5V.
Allora deve risultare: R1 =
VR
5V
=
= 18,3KΩ
I S (273k ) 273 * 10 −6 A
(Che si può fare con R1 =15kΩ+ trimmer multigiro da 5kΩ).
Il condensatore di retroazione è stato aggiunto per limitare superiormente la banda passante a circa 1.5Hz, per
evitare interferenze specie dalla rete elettrica. La R3 serve a limitare la corrente di bias, ed è circa il parallelo fra le
altre 2 resistenze.
Per tarare si mette la sonda (isolata) a contatto con una miscela di acqua e ghiaccio (0°C) e tarare con P1 lo zero.
Ancora la si mette a contatto con acqua bollente (100°C) e si regola P2 per il fondo scala. La taratura può essere
fatta anche con un termometro campione.
Specifiche sul National LM35A
E’ un trasduttore di temperatura che si comporta come un generatore di tensione. La tensione è
proporzionale alla temperatura assoluta : V = k * T (T in gradi K).
La constante di proporzionalità k ha valore nominale di 10 µV / °C . Il campo di misura si estende
da -55°C (218 K) a +150°C (423 K), con una precisione di ±1°C.
+Vcc
(4÷20 V)
LM35A
+Vcc
Vout
(20mV÷1,5V)
(2÷150°C)
LM35A
Vout
(-550mV÷1,5V)
(-55÷150°C)
R
-Vcc
Figura 19: uso per tensioni di uscita positive e negative
18
La resistenza R di pull-down deve essere scelta in modo da determinare una corrente verso la
| −Vcc |
tensione di alimentazione negativa di circa 50 µA : R =
.
50 * 10^ −6
Poiché il dispositivo è a piccola potenza, ha una limitata possibilità di pilotare carichi capacitivi.
Ad esempio, se solo si connette il dispositivo tramite un cavo schermato avente una certa
lunghezza bisogna, secondo il costruttore, disaccoppiare il trasduttore con una resistenza di circa
2kΩ in serie all’uscita, oppure migliorare la tolleranza alla capacità con un circuito RC
smorzante in parallelo all’uscita. Per ulteriori informazioni e per le connessioni guardare il data
sheet in allegato.
TRASDUTTORI FOTOELETTRICI
Trasformano le variazioni di intensità luminosa in variazione di grandezza elettrica e possono
essere distinti in tre grandi gruppi :
•
Dispositivi fotoemissivi
Sono basati sull’effetto fotoelettrico propriamente detto : i quanti di luce colpiscono un
catodo costituito da un metallo a basso lavoro di estrazione causando la ionizzazione di una
certa percentuale degli atomi del metallo stesso. Gli elettroni liberati danno luogo ad una
corrente proporzionale all’intensità luminosa incidente. A questo gruppo appartengono le
cellule fotoelettriche (usate in passato per la lettura delle colonne sonore nei cinema) e i
fotomoltiplicatori usati in dispositivi specialistici come ad esempio per misure fotometriche
in astronomia o per rivelare radiazioni nucleari.
•
Celle Fotovoltaiche
Il loro funzionamento è basato sul fatto che esponendo una giunzione PN con gli estremi
chiusi su un carico resistivo, in esso circola una corrente inversa. Le cellule fotovoltaiche
basate su tale fenomeno raramente vengono usate come trasduttori, sono però utlizzate per la
conversione diretta di energia solare in energia elettrica tramite batterie solari che arrivano
a un rendimento di conversione di oltre il 10% (batterie al silicio).
•
Elementi fotoconduttori
I Fotoresistori sono trasduttori a variazione di resistenza, sensibili alle radiazioni di
lunghezza d’onda compresa tra 0.4÷0.8Å (luce visibile). Sono costituiti da materiali
semiconduttori leggermente drogati (solfuro di cadmio, solfuro di piombo, ecc.) ed il loro
principio di funzionamento è basato sull’effetto fotoconduttivo. Quando la superficie del
fotoresistore viene esposta alla luce, l’energia luminosa assorbita provoca la rottura dei
legami covalenti e quindi l’aumento delle coppie lacuna-elettrone, rispetto a quelle generate
per effetto termico. Questo fenomeno, noto come effetto fotoconduttivo, determina
l’aumento della conducibilità del semiconduttore. La variazione della resistenza R in
funzione dell’illuminamento è data dalla seguente legge: R=A·E^-α
A cost dimensionale che dipende dalla forma geometrica della superficie esposta
E illuminamento (flusso lumino per unità di superficie [lux])
Α cost <1 dipende dalla tecnologia con cui è stato realizzato il dispositivo.
19
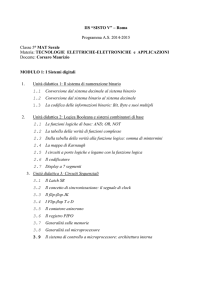
Applicazione che fa uso del fotoresistore NORP-12
La resistenza dei fotoresistori commerciali varia da alcuni MΩ, in condizioni di oscurità, ad alcune decine di Ω
quando sono sottoposti ad illuminamento intenso.
RESISTENZA [kΩ]
Potenza [mW]
1000
100
300
10
200
1
100
0.1
1
10
100
1000
[LUX]
Fig. fotoresistenza
0
30
60
90
120
T [°C]
Figura 20: caratteristica resistenza/illuminamento in scala logaritmica e potenza
Caratteristiche elettriche
Resistenza di oscurità (min)
Resistenza di cella a 10 Lux
Resistenza di cella a 1000 Lux
Tensione max. di picco (AC e DC)
Corrente max (25°C)
Potenza max (a 25°C)
Range di temperatura
Capacità di oscurità (tipica)
Reazione spettrale di picco
Parametri principali del NORP-12
Valori
1
9
400
320
75
250
-60÷+75
3,6
0,53
Unità di misura
MΩ
kΩ
Ω
V
mA
mW
°C
pF
µm
Si realizza un controllo di luminosità di tipo ON/OFF.
20
R2
680
R1
15k
D1
V1
9Vdc
R3
1,5k
Q1
2N2222
Rlux
NORP-12
Figura 21: sistema di controllo ON/OFF
Basta semplicemente inserire il fotoresistore in un circuito a transistor funzionante in ON/OFF per attivare un
diodo led. (Led acceso ==buio). Se al posto del led si collega un relè il dispositivo è in grado di controllare
lampadine alimentate dalla tensione di rete. Le resistenze R1 e Rlux polarizzano (unitamente a R3 che limita la
corrente) la base del transistor. Quando c’è luce, la fotoresistenza assume un valore trascurabile che porta il
transistor nello stato di OFF. Quando è buio la Rlux assume valori elevati, tale da mandare in conduzione il
transistor portandolo nello stato di ON. La R1 limita la corrente nel led.
Fotodiodi. Il loro funzionamento è basato sul fatto che esponendo una giunzione PN
polarizzata inversamente (si parla di modalità fotoconduttiva, esiste anche la modalità
fotovoltaica), alla corrente tipica del diodo si somma una corrente IL > 0 che varia in maniera
lineare con il flusso luminoso. Per tensioni inverse nell’ordine del volt la corrente nella
giunzione è I = - (IL + IO). I fotodiodi sono quindi diodi in cui la zona di giunzione è resa
accessibile alla radiazione luminosa. Pregi : sono piuttosto sensibili anche se i bassi valori di
corrente richiedono opportuni circuiti di condizionamento e sono abbastanza veloci
(possono essere utilizzati nei sistemi di trasmissione in fibra ottica).
Fototransistor. Rappresentano un evoluzione dei fotodiodi. Sono essenzialmente dei
transistor a giunzione (BJT) polarizzati normalmente, ma con il circuito di base aperto la cui
giunzione BC (base-collettore) è esposta alla luce. In tale giunzione polarizzata
inversamente si genera una corrente inversa analogamente a quanto avviene nei fotodiodi.
La sensibilità è molto elevata, la risposta in frequenza è buona e il rumore è minore di quello
presentato da un fotodiodo. L’alta sensibilità consente al fototransistor di comandare
direttamente dispositivi logici. Sono spesso utilizzati nei sensori di posizione (encoder).
TRASDUTTORI ESTENSIMETRICI
Sono basati sul fatto che un conduttore ohmico di lunghezza L e sezione S dove la resistenza è
l
espressa in R= ρ
(dove ρ è la resistività del materiale Ω/m), sottoposto a trazione, L aumenta
S
e S diminuisce ed entrambe le variazioni fisiche contribuiscono ad aumentare la resistenza.
L’opposto si verifica se il conduttore viene compresso. Nei limiti delle deformazioni elastiche
21
come espresse dalla legge di Hooke, le deformazioni sono proporzionali alle forze che li
determinano. In un corpo cilindrico di sezione circolare, le variazioni di lunghezza L e raggio R
della sezione sono legate dalla relazione:
dr
dl
dove µ è il coefficiente di Poisson del materiale considerato e dr e dl sono variazioni
= −µ
r
l
differenziali di raggio e lunghezza. Il segno meno indica che al crescere di R diminuisce L e
viceversa. (Esiste anche l’effetto piezoresistivo, ovvero la variazione di ρ con la deformazione).
Gli estensimetri a semiconduttore hanno sensibilità maggiori, ma costi più elevati. Un difetto
molto grave degli estensimetri soprattutto a semiconduttore è che la loro resistenza varia anche
con la temperature sia perché varia la resistività sia perché la stessa variazione di temperatura
provoca deformazioni per dilatazione. Per compensare le variazioni causate da temperatura è
bene usarli in coppie montati a ponte, facendo in modo che uno solo sia soggetto a sollecitazione
o che magari si deformino, ma in senso opposto.
R+dR est. sollecitato
R estens. libero
Vdc
-
Vo
+
R
R
Figura 22: ponte di Wheatstone
E’ possibile usare anche per gli estensimetri un ponte resistivo linearizzato utilizzato anche nelle
termoresistenze, ma le variazioni percentuali di resistenza sono relativamente piccole e lo
scostamento della linearità rimane piccolo: Vo = −
∆R
Vrif
R0 + R
R+dR
R0
Vrif
6
-
R0
5
7
V0
+
R
Figura 23: ponte resistivo linearizzato
Celle di carico
Sono tipicamente dei trasduttori di forza. In pratica sono costituiti da ponti estensimetrici montati
in strutture di metallo con caratteristiche di elasticità note e calibrate. La deformazione elastica,
misurata dagli estensimetri, permette di risalire alla forza che l’ha determinata. Le celle di carico
differiscono per forma, campo di forze misurato e sensibilità. Ogni singolo esemplare è
accompagnato da un certificato di taratura (fondo scala, sovraccarico ammissibile,
alimentazione, sensibilità,. Nominale, Err.non.linear., err.offset, etc.). Esistono celle di carico in
cui sono montati due ponti (per un totale di quattro rami), dove di conseguenza la sensibilità è
raddoppiata. Per elevate precisioni è necessario conoscere con esattezza la tensione di
22
alimentazione del ponte estensimetrico che non coincide con la tensione di alimentazione a
monte dei cavi di connessione a causa della c.d.t. sui cavi stessi. Per questo motivo molte celle di
carico dispongono di una coppia di cavi (etich. Sense) che fanno capo a nodi di alimentazione
del ponte.
Sensori di pressione
Sono basati sul principio del barometro aneroide : una camera sottovuoto è chiusa da una
membrana flessibile. La membrana si flette a seconda della pressione che agisce sul lato esterno.
La deformazione è rilevata dai dispositivi fissati sulla sua superficie. Nei modelli integrati la
membrana è costituita da una piastrina di silicio su cui sono incastonate una o più celle
estensimetriche a semiconduttore con disposizione solitamente a ponte.
Esistono anche sensori di pressione differenziali in cui la membrana separa due camere
sottoposte a pressioni diverse, quindi il segnale in uscita è proporzionale in valore e in segno alla
differenza fra le due pressioni.
TRASDUTTORI DI POSIZIONE
Potenziometri : sono i trasduttori di posizione più semplici. I potenziometri utilizzati come
sensori di posizione sono a variazione lineare. Esistono potenziometri ottimizzati per
applicazioni ad elevata precisione e con attrito ridotto : solitamente hanno un campo di rotazione
di 360° senza fine corsa. Oltre ai modelli rotativi esistono anche potenziometri in cui il
movimento del cursore è rettilineo.
Trasformatori differenziali: Servono a rilevare piccoli spostamenti di solito rettilinei (LVDT).
Contengono un nucleo mobile centrato rispetto ad un avvolgimento principale e due
avvolgimenti secondari aventi uguali tensioni indotte, ma in controfase in maniera da avere una
tensione in uscita nulla. Quando il nucleo si sposta da parte di uno dei secondari la tensione
indotta in esso prevale e l’uscita non è più nulla. L’ampiezza dell’uscita rende un’informazione
sull’entità dello spostamento, mentre la fase ci indica il verso dello spostamento.
Figura 24: Trasformatori ad accoppiamento variabile: LVDT (Linear Variable Differential Transformer)
23
Enconder incrementale : E’ un dispositivo che serve a rilevare gli spostamenti angolari
(rotazioni) di un asse. Nella sua forma più semplice è costituito da un disco calettato sull’asse di
rotazione su cui è praticata una ghiera di N fori equispaziati (in realtà possono essere delle zone
trasparenti fotoincise). Una barriera fotoelettrica di solito costituita da una coppia
LED/fototransistor rileva la presenza o meno dei fori nella ghiera (eventualmente la circuiteria
del fototransistor può incorporare un trigger di Schmitt per eliminare incertezze di
commutazione). Se il disco ruota, in uscita al fotosensore si ha un treno di impulsi. Contando gli
impulsi si è in grado di determinare l’angolo di cui il disco si è spostato. La risoluzione angolare
è evidentemente data da 360/N. In questa forma l’encoder non è in grado di rilevare il verso della
rotazione e il suo uso è limitato a misurare velocità di rotazione ottenuta contando gli impulsi su
una base di tempo data. Se “f” è la frequenza del segnale generato, N il numero dei fori, “n” la
f
velocità di rotazione espressa in giri/s si ha : n = giri / s . (se N è 60 la frequenza coincide con i
N
giri al minuto). I vantaggi rispetto alla dinamo tachimetrica è che non si usura (stabile nel tempo)
e non deve essere tarata e può essere utilizzato per elaborazioni di tipo digitale.
Encoder incrementale a due (o tre) fasi. Per poter risalire anche al verso di rotazione si deve
utilizzare un encoder con due ghiere concentriche di settori trasparenti. Le due ghiere hanno lo
stesso numero di settori, ma i settori sono sfasati di un angolo corrispondente a mezzo settore
rispetto ai settori dell’altra. Ad ognuna delle ghiere corrisponde un uscita con un treno di impulsi
definita FaseA e FaseB (in alcuni modelli c’è un ulteriore FaseC utile perché la sua frequenza è
in rapporto 1:1 con la velocità di rotazione n in giri/s). Se l’encoder ruota in senso orario viene
rilevato il segnale di FaseA in anticipo di 90° sul segnale in FaseB, viceversa sarà il segnale
FaseB ad essere in anticipo di 90° sul segnale di FaseA.
Esistono anche in commercio degli encoder assoluti che danno la posizione angolare di una asse
(escludendo i multipli di 360°). Sono costituiti da 4 ghiere concentriche ciascuna con una
risoluzione di 1/16 di angolo giro. Con tale encoder è possibile codificare 4 bit (da 0000 a 1111),
e per evitare errori di codifica a causa del fatto che i 4 bit non vengono codificati
contemporaneamente a causa dei tempi di rotazione dell’asse, viene utilizzato il codice Gray che
consiste nel far variare solo un bit tra due configurazioni successive.
24
CONDIZIONAMENTO DEL SEGNALE
Blocco di Condizionamento
L’uscita di un trasduttore solo di rado può essere direttamente collegata ad uno strumento di
misura, di elaborazione o di visualizzazione.
Il segnale elettrico in uscita dal sensore/trasduttore, oltre a contenere componenti indesiderate, è
in genere troppo rumoroso e debole (valori dell’ordine dei millivolt o dei picoampere) per poter
essere trasmesso a distanza.
In questo caso è necessaria la presenza di un circuito di interfaccia che ottimizzi il collegamento
fra dispositivo sensibile e carico.
Grandezza fisica
da misurare
Sensore/trasduttore
Circuito di
interfaccia
(condizionamento)
Carico
Figura 25: sistema di manipolazione
Pertanto, a causa della “incompatibilità” fra l’uscita del sensore/trasduttore e l’ingresso del
sistema di acquisizione (carico) è necessaria una opportuna operazione di condizionamento
(manipolazione) sul segnale di uscita dal sensore/trasduttore.
Quindi: un circuito di condizionamento del segnale ha il compito di portare il segnale in uscita
dal sensore in un formato compatibile con il dispositivo di elaborazione che lo segue riducendo il
più possibile gli effetti negativi di carico e le interferenze esterne.
Condizionamento del segnale
Accade sovente che i segnali di uscita dei sensori non siano omogenei per natura elettrica
(corrente, tensione, resistenza, ecc.), per livello, e per tipo (tensione continua, alternata, pulsante,
ecc.) per cui risulta difficile implementare una interfaccia comune tra i sensori e l’unità di
governo.
Lo stadio di condizionamento del segnale comprende tutti i circuiti elettronici che trasformano i
segnali di uscita dai trasduttori in un segnale elettrico di tipo omogeneo. Funzioni tipiche di
questo stadio sono:
• Amplificazione: i segnali forniti dai trasduttori sono in genere di basso livello per cui
conviene fornire un’adeguata amplificazione in maniera di rendere l’escursione del segnale
compatibile con il valore della tensione di fondo scala del convertitore A/D. In questa
maniera si aumenta la sensibilità della catena sfruttando la risoluzione del convertitore.
Spesso è necessario applicare al segnale altre forme di elaborazione analogica come ad
esempio traslazioni di livello (al fine di compensare eventuali livelli indesiderati di tensioni
continue o per adeguare la polarità del segnale a quella del convertitore A/D), oppure
bisogna eliminare elevate tensioni di modo comune ricorrendo a configurazioni differenziali.
Nel progetto dell’amplificatore bisogna porre attenzione al rumore introdotto nella catena di
25
•
•
•
•
•
misura e ad eventuali effetti di carico sul sensore.
Filtraggio: i filtri utilizzati all’interno di una catena di misura hanno lo scopo sia di
eliminare componenti frequenziali indesiderate del segnale, sia di preparare il segnale alla
conversione analogico-digitale (filtri anti-aliasing). In genere si tratta di operazioni di
filtraggio passa-basso. La scelta del filtro dovrà tenere conto di diversi aspetti: la tipologia
del segnale di ingresso, l’errore introdotto dal filtro ( per via dell’attenuazione e sfasamento
delle varie armoniche), della risposta desiderata.
Conversione di segnali in tensione o corrente.
Adattamento di impedenza.
Altre forme di elaborazione analogica: possono essere effettuate al fine di scaricare l’unità
di elaborazione digitale successiva da alcune procedure. Tra le funzioni che possono essere
effettuate in forma analogica si hanno: moltiplicazioni e divisioni, calcolo del valore
efficace, amplificazioni logaritmiche e antilogaritmiche ecc.
l’isolamento galvanico dei dispositivi elettronici di elaborazione dalla fonte di segnale.
I circuiti di condizionamento si distinguono in:
• Attivi, se fanno uso di componenti amplificatori, per la messa in scala o l’isolamento.
• Passivi, come ad esempio i filtri, i circuiti di attenuazione (messa in scala), i convertitori
AC/DC, corrente-tensione ecc.
In relazione ai livelli delle grandezze elettriche di trasmissione dei segnali, esistono comunque
delle standardizzazioni per l’ambiente industriale che permettono la connessione di dispositivi
eterogenei per tipologia e per costruttore. Ad esempio, i segnali analogici che debbano percorrere
lunghe distanze vengono normalmente trasmessi con il cosiddetto Loop di Corrente,
nell’intervallo 4÷20 mA. I vantaggi di tale metodo di trasmissione sono:
• la possibilità di diagnosticare guasti o interruzioni, in quanto essendo il livello minimo a 4 mA,
un segnale nullo viene identificato come rivelatore di un guasto (“zero vivo”).
• una maggiore insensibilità al rumore, in quanto i disturbi di tensione lungo le linee di
trasmissione vengono attenuati dal regolatore di corrente.
• la possibilità di trasmettere ad una distanza maggiore a parità di accuratezza richiesta. Ad
esempio, supponendo di voler inviare un segnale che abbia una banda di 10 Hz, in presenza di
rumore “industriale” medio, con una accuratezza 0.5 %, si trova in letteratura il calcolo di una
distanza massima di 1500 m.
Altri livelli standard di segnale, normalmente impiegati quando le distanze di trasmissione non
sono molto grandi (es. dal bordo macchina al quadro di controllo), sono 0 ÷5 V, 0 ÷10 V e ±10 V
per i segnali analogici, 0 ÷24 V per i segnali digitali.
Amplificatori
I trasduttori nelle applicazioni reali mostrano raramente una impedenza di uscita piccola ed una
ampiezza del segnale di uscita conveniente alla sua successiva elaborazione. Occorre quindi un
dispositivo che funga da “adattatore” elettrico tra i trasduttori e i moduli di elaborazione del
segnale.
26
In questo paragrafo verrà discusso l’utilizzo di un amplificatore elettronico per eseguire questo
tipo di adattamento.
Vediamo alcune problematiche che rendono necessario l’introduzione di un amplificatore di
segnale:
• Tensione di uscita non idonea. L’uscita dei trasduttori in genere ha un livello basso, non
idoneo alla successiva elaborazione del segnale, ed in particolare, alla sua conversione in
formato digitale.
• Elevata impedenza di uscita dei trasduttori. Una elevata impedenza di uscita può produrre
errori rilevanti sul segnale acquisito. Lo stesso si può avere quando l’impedenza dei trasduttori
con uscita differenziale non sia bilanciata sui due canali (Sbilanciamento della impedenza di
uscita).
• Tensione di modo comune elevata. Se il segnale di uscita dei sensori ha una tensione di modo
comune elevata occorrerà utilizzare un dispositivo per estrarre l’informazione utile e eliminare la
tensione di modo comune.
• Necessità di isolare elettricamente il trasduttore dal circuito di acquisizione. Tale necessità
può essere richiesta per soddisfare criteri di sicurezza (protezione dei componenti, ma anche e
soprattutto degli operatori), oppure per migliorare l’immunità ai disturbi del sistema di
acquisizione. Infatti lunghi anelli di segnale, costituiti dalla coppia di conduttori di massa e di
segnale, captano con molta facilità i disturbi ambientali.
Un ultimo motivo per l’isolamento consiste nella necessità di proteggere i circuiti elettrici del
sistema di acquisizione da possibili danneggiamenti dovuti al collegamento con il trasduttore, ad
esempio nel caso in cui il trasduttore sia inserito in circuiti in cui le grandezze elettriche sono
associate ad elevata potenza. In questo caso viene inserito un amplificatore di isolamento che è
un dispositivo la cui funzione primaria consiste nel fornire un isolamento galvanico tra lo stadio
di ingresso e quello di uscita. Un amplificatore di isolamento è solitamente costituito da uno
stadio amplificatore di ingresso (con amplificatore operazionale o di strumentazione) e da uno
stadio di isolamento a guadagno unitario. La barriera di isolamento viene realizzata
comunemente secondo una delle seguenti modalità: accoppiamento capacitivo, accoppiamento
optoelettronico, accoppiamento trasformatorico.
TECNICHE DI CONVERSIONE V/I, I/V
I componenti attivi maggiormente utilizzati per l’amplificazione di segnale sono gli amplificatori
operazionali. Le caratteristiche ideali (e reali) di un operazionale si possono riassumere come
segue:
• Guadagno di tensione ad anello aperto ∞ (Reale: 2 x10^4 ÷2 x10^5)
• Impedenza d’ingresso ∞ (Reale: 1 ÷10^6 MΩ)
• Impedenza d’uscita nulla (Reale: 10 ÷100Ω)
• Larghezza di banda ad anello aperto ∞ (Reale 10 ÷100 MHz)
L’amplificatore operazionale è utilizzato sempre in configurazione retroazionata, principalmente
per evitare che esso saturi (Vout = Vcc) anche per piccoli segnali in ingresso (es. rumore).
Con la retroazione si ottiene anche un notevole miglioramento delle prestazioni dinamiche del
circuito, soprattutto in termini di larghezza di banda.
27
Convertitore Tensione-Corrente
Applicando una tensione ai capi di una resistenza si effettua una conversione tensione-corrente,
ma il valore della resistenza (carico) e la non idealità della sorgente di tensione, condizionano la
conversione stessa.
Quindi è necessario un convertitore che non risenta di tali problemi, in particolare che non
dipenda dal carico, ci vorrebbe un generatore di corrente ideale controllato in tensione. una
soluzione è quella in fig.26.
Rc
--->
I
5
Vi
R1
6
5
+
7
-
7
+
6
-
Vi
--->
R1
Fig a)
Rc
I
Fig b)
Figura 26: semplice convertitore V/I
I due circuiti, invertente e non, necessitano del carico collegato al posto della resistenza di
retroazione, e non hanno un terminale a massa.
Per poter definire un offset di corrente in uscita si può utilizzare il circuito in fig. 27, che
presenta sempre il carico non collegato a massa.
I
--->
Vi
5
6
+
7
-
Rc
R1
Vrif
R2
R3
Vcc
+
R4
VE
-
Figura 27: convertitore V/I con offset di corrente in uscita
Il BJT è in zona lineare : I C = hfeI B = hfe( I E − I C ) da cui:
IC =
hfe
IE
1 + hfe
Nell’ipotesi di R3>>R4 cioè R3≥10R4 si ha:
I = IC =
hfe VE
V
≈ E
1 + hfe R4
R4
a)
Applicando Millman si ha :
28
VE
V
+ R
R3
R1
da cui ricavando
V = V+ =
1
1
1
+
+
R1
R2
R3
e sostituendo nella a) : I ≈
V
R
R
1+ 3 + 3
R4
R1
R2
R3
R3
R3
VE = V
− VR R
1 + R + R
1
2
1
VR R3
− R R
4
1
b)
si vede perché la corrente varia linearmente con V ingresso e come è possibile agire su VR per
definire un opportuno offset di corrente. Inoltre si può agire su R1 per fissare l’inizio scala e poi
su R2 per regolare l’ampiezza della corrente.
I non dipende da Vbe del BJT e nenche da hfe purchè sia hfe>>1. La corrente massima dipende
V − VCEsat
dal fatto di mantenere il BJT in zona lineare: I MAX = cc
RC + R4
Al
contrario si può definire
V − VCEsat
RCMAX = cc
− R4 .
I
il
carico
massimo
per
evitare
la
saturazione:
Applicazione proposta
Si realizza un convertitore tensione/corrente, con in ingresso una tensione 0÷10V e uscita in corrente variabile tra
4÷20mA. Si utilizza come BJT un BC547C NPN, con hfe=400 in modo da rispettare la a). Si scegli R4=100Ω.
I
Vi 0-10V
--->
5
6
+
-
5
7
6
18k
+
7
-
Rc
1k
330k
Vcc1
10k
5k
100
100k
-15V
Figura 28: applicazione convertitore V/I
Dalla b) si ha: ∆I ≈ ∆V
R4
∆V ≈
∆IR4
R
R
1 + 3 + 3
R1
R2
R
R
1 + 3 + 3
R1
R2
Con ΔI=20mA-4mA=16mA si ottiene ΔV>1,6V
In ingresso c'è un partitore che serve per attenuare il segnale che può raggiungere i 10V.
R
Per semplificare i conti si pone R2=∞ e si ha: ∆I = 1
1 + 3
R4
R1
∆V
Fissato Vr si ricava il rapporto R3/R1 e tenento presente che a V=0 corrisponde 4mA con Vr=-15V si ha:
29
R3
R
= − I 4 ≈ 2,67 ⋅ 10 − 2
R1
VR
Con R3=10kΩ si ottiene R1= 375Ω
Quindi:
∆V =
∆IR4
= 1,56v
R
R
1 + 3 + 3
R1
R2
allora il rapporto del partitore di ingresso deve essere di 10/1,56=6,41.
L'inseguitore di tensione di ingresso serve per avere elevata resistenza di ingresso. Il trimmer da 5kΩ serve per
tarare l'intervallo della corrente di uscita, mentre il trimmer da 100kΩ permette la taratura dell'offset, cioè di avere
4mA di uscita per V=0V.
Il circuito appena descritto ha l’inconveniente di essere unidirezionale, cioè la corrente ha un
solo verso di percorrenza. In Fig.5 è presente un convertitore V/I bidirezionale con carico
collegato a massa e il suo circuito equivalente.
R2
I
I
---->
5
I1
7
Ro
+
6
R3
R4
Rc
Fig a)
---->
R5
--------->
R1
-
Vi
Vc
Vo
Fig b)
Figura 29: convertitore V/I con carico a massa e circuito equivalente
Con un po’ di semplici passaggi nella risoluzione del circuito si ha che la corrente di uscita I = Vi .
R4
30
Convertitore Corrente-Tensione
Per aver risultati indipendenti dalla non idealità della sorgente di corrente e dal carico collegato
in uscita al convertitore I/V, non basta una semplice resistenza, ma si ricorre ai seguenti circuiti.
Figura 30: semplici convertitori I/V
Dalla Fig. a) si vede che V0 = − R1 ⋅ I , mentre dalla Fig. b) si può ottenere un offset di tensione in
uscita:
V
I1 = I + I 2 , con I1 = − V0 e I 2 = Rif
R2
R1
sostituendo :
Vo = − R1 ⋅ I −
R1
VRif .
R2
I vantaggi di questi circuiti sono di avere resistenze d’ingresso e d’uscita basse. La prima ci dice
che la I non è influenzata dal convertitore, la seconda immunizza le caratteristiche del
convertitore dal carico. Il limite è che deve valere la seguente relazione: | I1 |=| I + VR |≤ VOH .
R2
R1
Applicazione proposta
Convertitore I/V che in ingresso ha un segnale da 4÷20mA e in uscita da 0÷10V. Si suppone che la corrente entra
nel convertitore.
Essendo | ∆V0 |= R1 = 625Ω
∆I
Con in ingresso I=4mA l’uscita è nulla allora: Vrif = − R2 ⋅ I . Essendo l’operazionale alimentato a ±15V si
sceglie Vrif=-15V. Allora: R2 = −
Vrif
= 3750Ω
I
Nello schema vi è anche un O.A. invertente a guadagno unitario. Il trimmer da 1kΩ serve a regolare l’offset, mentre
quello da 500Ω l’intervallo di variazione della tensione di uscita.
R1
390
1
500
2
33k
7
6
33k
5
Vo
7
+
+
3,3k
R2
-
5
-
6
I
--->
2
1k
1
-15V
Figura 31: convertitore I/V
31
EFFETTI DELL’IMPEDENZA DI USCITA DEI TRASDUTTORI
Analizziamo i problemi dovuti alla non idealità della impedenza di uscita dei trasduttori.
In genere i trasduttori non hanno una impedenza di uscita piccola, e quindi per poter acquisire
correttamente il segnale occorre un dispositivo che faccia da “adattatore di impedenza” tra il
trasduttore e gli stati successivi di elaborazione.
I trasduttori di segnale analogico possono essere divisi in trasduttori con uscita singola (single
ended) riferiti a massa e trasduttori con uscita differenziale (differential). Analizziamo
separatamente di due casi:
Trasduttori ad uscita singola
Per single-ended si intende che esiste un percorso comune, condiviso da tutti i segnali (un
ritorno comune attraverso la connessione tra le masse del campo e del sistema di acquisizione
(pericolo: anello di massa!!).
Consideriamo il circuito equivalente del trasduttore reale mostrato in figura 32, in cui `e presente
un generatore di tensione V , corrispondente al segnale di uscita del trasduttore, ed una resistenza
Ru, corrispondente all’impedenza di uscita del dispositivo. In figura è mostrato anche il
dispositivo di acquisizione del segnale, avente una impedenza di ingresso pari a Ri.
Vu
V
Ru
Vi
Ri
Figura 32: Circuito equivalente del trasduttore reale
L’errore introdotto dalla presenza di Ru `e quantificabile come:
| Vu − Vi |=| Vu − Vu
Ri
Ri
Ru
|=| Vu | (1 −
) =| Vu |
Ri + Ru
Ri − Ru
Ru + Ri
dove Vu e Vi sono, rispettivamente, il valore vero del segnale del trasduttore e il suo valore
acquisito.
Se supponiamo che Ru = 1KΩ e Ri = 1MΩ, per l’errore percentuale relativo all’ampiezza del
segnale Vu otteniamo:
Ru
| Vu |
Ru + Ri × 100 ≈ 0,1%
ep =
V max
in cui abbiamo supposto che Vu = Vmax (condizione migliore).
Otteniamo che l’errore introdotto dalla impedenza di uscita del trasduttore è molto elevato in
particolare, se lo stadio successivo è un convertitore A/D (vedi unità didattica successiva),
potrà essere più grande dell’errore introdotto dalla quantizzazione del segnale.
32
Trasduttori ad uscita differenziale. Consideriamo il trasduttore di deformazione costituito dal
ponte di Wheatstone di figura 33. Il segnale di uscita del ponte è costituito dallo sbilanciamento
osservato tra i due terminali di uscita, acquisito sotto forma di differenza di potenziale.
R
R
Ru+
--->
Vrif
Ru--->
2
R
Rg
1
Figura 33: Trasduttore con uscita differenziale (ponte di Weatstone)
L’impedenza di uscita dei due canali vale:
Ru + =
R
;
2
Ru − =
R ⋅ Rg
;
R + Rg
Supponiamo di utilizzare un amplificatore operazionale in configurazione differenziale (Figura
33) per acquisire il segnale.
In tale configurazione, il guadagno dell’amplificatore si può calcolare sfruttando il principio di
sovrapposizione degli effetti. Eseguendo i seguenti passi:
– Calcolo di Vout con V1 ≠ 0 (ingresso sul ramo invertente) e V2 = 0 (ingresso sul ramo non
invertente).
R2
I
V2
5
V+
7
Vout
+
V6
-
R1
V1
R1'
R2'
Figura 34: Amplificatore in configurazione differenziale
– Calcolo di Vout con V2 ≠ 0 (ingresso sul ramo non invertente) e V1 = 0 (ingresso sul ramo
invertente).
Si ottiene:
R
Vout ,1 = − 2 V1 ;
R1
Vout , 2 = V2
R2'
R1 + R2
;
'
'
R1
R1 + R2
Dalle quali, nell’ipotesi che R2/R1 = R2’ /R1’ :
33
Vout = (V1 − V2 )
R2
;
R1
Si può facilmente notare che il guadagno di modo comune (ottenuto ponendo V1 = V2 = Vcm) è
pari a:
R2'
R1 + R2
R
Acm = '
− 2 ;
'
R1
R1
R1 + R2
che risulta essere pari a zero con l’ipotesi fatta in precedenza.
Risulta evidente che per avere una buona amplificazione del segnale differenziale occorrerebbe
progettare il circuito in modo che siano verificate contemporaneamente le seguenti condizioni:
1. Il guadagno è bilanciato se:
R2
R'
= 2' ;
R1
R1
2. L’impedenza di ingresso è bilanciata se:
R1 = R1’ + R2’
Lo sbilanciamento sull’impedenza di ingresso produce la comparsa di un segnale differenziale di
errore che si somma al segnale utile. Per ridurre gli effetti di tale sbilanciamento si progettano
solitamente R1 e R1’ in modo tale che esse siano alcuni ordini di grandezza superiori alla
resistenza di uscita delle sorgenti di segnale, in modo tale che l’errore di ripartizione della
tensione sia comunque trascurabile.
3. Per minimizzare l’offset sulla tensione differenziale dovuta alle correnti di polarizzazione,
occorre che sia:
R1 ⋅ R2
R ' ⋅ R2'
;
= '1
R1 + R2
R1 + R2'
Le correnti di polarizzazione (bias currents) sono correnti parassite che fluiscono dai terminali V
+ e V − dell’amplificatore (si veda Fig. 34).
R2
V1
R1
VIbias
Vout
V+
+
V2
R1'
Ibias
R2'
Figura 35: Circuito equivalente che tiene conto delle correnti di polarizzazione
34
Considerando i due terminali di ingresso V1 e V2 messi a massa, le correnti di polarizzazione
sono caricate da una impedenza pari a R1R2 /(R1+R2) per il primo ramo e R1’R2’/(R1’+R2’) per
il secondo ramo.
I vincoli richiesti sul valore delle resistenze nell’amplificatore differenziale non possono essere
soddisfatti tutti contemporaneamente. Inoltre, le impedenze d’uscita dei trasduttori differenziali
si sommano a quelle dei rami di ingresso, pertanto se sono sbilanciate (v. ponte di Wheatstone)
creano ulteriori problemi di progetto. Per questi motivi e per le non elevatissime prestazioni in
termini di impedenza d’ingresso e reiezione di modo comune, nella pratica l’amplificatore
differenziale basato su un unico operazionale non viene utilizzato nelle catene di acquisizione dei
segnali.
In sostanza le differenze fra i due segnali, single-ended e differenziale si possono riassumere :
• Il segnale differenziale è più protetto da disturbi;
• Il segnale differenziale emette meno disturbi;
• Alcuni trasduttori forniscono segnali differenziali;
• Convertitori A/D molto precisi o molto veloci operano direttamente su segnali differenziali
Figura 36: confronto tra segnali single-ended e differenziale
AMPLIFICATORE DI STRUMENTAZIONE (INA)
Per amplificare il segnale evitando i problemi evidenziati nella precedente sezione, è possibile
utilizzare un dispositivo denominato amplificatore di strumentazione (instrumentation
amplifier).
L’amplificatore di strumentazione è caratterizzato da una elevata impedenza di ingresso, basse
correnti di polarizzazione, elevata reiezione della tensione di modo comune, ingressi differenziali
ben bilanciati e caratteristiche elettriche stabili al variare della temperatura.
Il guadagno del componente è regolabile utilizzando una sola resistenza di ingresso, mentre tutti
gli altri componenti sono integrati all’interno del dispositivo. Questo consente una elevata
precisione e stabilità dei parametri del componente.
Lo schema costruttivo di un amplificatore di strumentazione è mostrato in figura 37.
35
Lo schema si compone di tre amplificatori operazionali. I primi due amplificano la tensione
differenziale, mentre il terzo esegue la reiezione della tensione di modo comune (conf.
differenziale).
Il terminale di sense dell’amplificatore di strumentazione (Fig. 37) deve essere collegato al
terminale di uscita (Vout) per chiudere la retroazione del secondo stadio dell’amplificatore di
strumentazione. Normalmente i due terminali sono connessi in prossimità del dispositivo.
Il terminale di reference (normalmente connesso a massa) può essere collegato ad un generatore
di tensione anzichè a massa per traslare il livello dell’uscita.
La funzione di trasferimento del componente si calcola componendo la situazione (1) in cui `e
V1 ≠0 e V2 = 0, ed il caso (2) in cui `e V1 = 0 e V2 ≠ 0. Inoltre per facilitare i calcoli
consideriamo R1=R1’, R2=R2’, R3=R3’.
5
V1
6
+
R2
V-
R3
7
Sense
R1
Rg
6
-
R2'
7
Vout
R3'
7
Reference
+
5
V2
5
+
6
-
R1'
V+
Figura 37: Schema costruttivo dell’amplificatore di strumentazione
Le tensioni al 1° stadio, V - e V +, valgono rispettivamente:
V
−
= V1 − R1
V1 − V2
;
Rg
V
+
= V2 + R1
V1 − V2
;
Rg
la differenza:
V
+
R
− V − = (V2 − V1 ) 2 1 + 1 = Vd ⋅ G;
R
g
al 2° stadio (differenziale):
Vout = (V + − V − )
R3
2 ⋅ R1 R3
= (V2 − V1 )1 +
;
R2
Rg R2
Dalla formula si nota che tramite la Rg è possibile modificare il guadagno dell’amplificatore. In
genere l’IC (INA), ha la Rg da inserire esternamente all’IC stesso. Non è conveniente realizzare
tale amplificatore con 3 operazionali tipo il 741, poiché si hanno problemi con il CMMR, infatti
le resistenze da mettere non sono perfettamente uguali così da creare dissimmetria.
36
BIBLIOGRAFIA E SITOGRAFIA
Gli appunti di questa lezione sono stati tratti dalla consultazione dei seguenti volumi:
- Ambrosini, Perlasca; Corso di elettronica sperimentale, vol. B/2, editore Tramontana, 2003.
- Ambrosini, Perlasca; Corso di elettronica sperimentale, vol. A/2, editore Tramontana, 2003.
-Ambrosini; Componenti e circuiti analogici e di potenza, editore Tramontana, 1996.
-De Sanctis, Cacciaglia, Saggese; Sistemi, editore Calderini, 2006.
-Ferrari; Appunti di lezione di didattica dell’elettronica generale, SILSIS, 2007.
- Franco; Amplificatori operazionali e circuiti integrati analogici, editore Hoepli, 1992.
- Frulla, Sensori e trasduttori industriali, editore Il Rostro, 1992.
-Ghisla; Dispensa di didattica dell’elettronica applicata, SILSIS, 2007.
-Licata; Sistemi, editore Thecna, 2007.
Approfondimenti e specifiche tecniche prese dai seguenti siti:
www.unipm.it
www.national.com
www.datasheetcatalog.net
www.analog.com
37