B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
CAP. 7 – TEORIA STATISTICA delle DECISIONI
Introduzione
Nella premessa a queste note didattiche si è affermato che la disciplina che si occupa
della raccolta e del trattamento scientifico dei dati (manifestazioni dei fenomeni
collettivi di interesse) per trasformarli in informazioni è la Statistica, se poi le
informazioni stesse devono essere utilizzate per risolvere uno specifico problema
decisionale, cioè un problema che si risolve nella scelta ottimale di una tra diverse
alternative a disposizione, allora il contesto di riferimento è la Teoria delle decisioni.
Nella fusione delle due discipline si sostanzia un’altra disciplina scientifica: “La
Teoria statistica delle decisioni” o “Teoria delle decisioni statistiche” che per certi
versi può essere intesa come generalizzazione ed estensione della Statistica che in
questo modo risulta anche meglio caratterizzata nelle sue diverse connotazioni e meglio
precisata nei contenuti. In altri termini si può anche definire la statistica come il
fondamento logico e metodologico per la risoluzione dei problemi decisionali.
In questa prospettiva la Statistica si caratterizza come disciplina scientifica che non
si limita alla sola trasformazione dei dati in informazioni ma che si occupa anche della
trasformazione delle informazioni in conoscenza utilizzabile a fini operativi di
intervento (fini decisionali) 1.
7.1 - Teoria delle decisioni
Oggetto di studio della teoria delle decisioni è il processo decisionale. Attraverso
l’analisi del comportamento degli attori (individui o gruppi) coinvolti nel processo, si
procede, cioè, all’esame di come i decisori prendono o dovrebbero prendere delle
decisioni.
Allo sviluppo della teoria delle decisioni hanno contribuito cultori di discipline
diverse: filosofi e logici, matematici e statistici, psicologi e sociologi, economisti, ecc.
Gli sviluppi della teoria spaziano dalle speculazioni astratte, relative ad agenti
idealmente razionali, ai suggerimenti pratici per la risoluzione ottimale di specifici
problemi decisionali, all’analisi dei processi decisionali coi come si svolgono nella
realtà.
1
Molti autori (Cox, 1958; Smith, 1965; Barnett, 1999) affermano che una distinzione deve essere fatta tra inferenza
statistica e teoria statistica delle decisioni. Ma altri autori come Savage (1951) e Lindley (1965, 2006), e questo è
anche il parere dell’autore di queste note didattiche, considerano la teoria statistica delle decisioni come una naturale
e necessaria generalizzazione dell’inferenza statistica. Inoltre, l'approccio decisionale, combinando varie teorie di
inferenza statistica, evita i dogmatismi che possono portare a situazioni paradossali, è esente da errori logici, è più
efficace nel contesto applicativo e tratta con successo una gamma più ampia di problemi rispetto agli approcci
tradizionali. L'approccio decisionale fornisce, cioè, una soluzione soddisfacente al cosiddetto problema pragmatico
dell’induzione.
367
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
In questa ottica si è soliti distinguere la teoria delle decisioni in due filoni principali:
teoria normativa e teoria descrittiva. Chi si occupa di teoria descrittiva cerca di scoprire
come le decisioni vengono prese nei diversi contesti operativi; chi si occupa di teoria
normativa analizza il modo con cui le decisioni dovrebbero essere prese facendo
riferimento ad agenti idealmente razionali, procedendo, cioè, all’esame delle
conseguenze logiche di differenti regole decisionali o esplorando gli aspetti logicomatematici o filosofici di diverse descrizioni di comportamento razionale. Questa
distinzione è utile ma alquanto artificiosa, essendo l’informazione sul modo effettivo di
prendere decisioni, certamente rilevante ai fini della fissazione di regole su come le
decisioni devono essere prese; d’altro lato nessuno studio sul comportamento effettivo
di agenti può consentire il conseguimento di risultati soddisfacenti se lo stesso non
viene, in qualche modo, posto a confronto con una sorta di comportamento ideale
(razionale).
La teoria descrittiva delle decisioni non interessa in questa sede essendo oggetto di
discipline specifiche quali la psicologia, la sociologia e, per alcuni aspetti, l’economia.
Qui verranno presentati gli elementi essenziali della teoria normativa delle decisioni 2: ci
si occuperà, cioè, di come le decisioni dovrebbero essere prese per massimizzare il
proprio “benessere” e non di come le decisioni sono effettivamente prese.
Ma, come già sottolineato, il riferimento alla teoria normativa non può essere
assoluto, si deve, infatti, tenere conto di tutta una serie di vincoli e di condizionamenti
che emergono dall’analisi dei processi reali affinché le regole di comportamento
razionale possano tradursi in comportamenti effettivi utili al decisore.
Per caratterizzare e distinguere questo specifico sviluppo della teoria normativa delle
decisioni alcuni autori hanno suggerito la dizione teoria prescrittiva che si caratterizza,
appunto, per il fatto che le regole ideali di comportamento razionale analizzate devono
poter essere tradotte in comportamenti effettivi (sui quali, come già sottolineato, incide
una serie innumerevole di condizionamenti sia individuali che di contesto) tali da
consentire al decisore il conseguimento del beneficio massimo.
I fondamenti della moderna teoria delle decisioni o si trovano nell’opera di Von
Neumann e Morgenstern (1947). I due autori mostrano come, sulla base di alcuni
postulati o assiomi di comportamento razionale di colui che deve prendere una
decisione, sia possibile introdurre una funzione a valori reali detta, a seconda del
contesto in cui si opera, di valore, o di utilità, per cui una decisione fondata unicamente
sulla massimizzazione del valore atteso di tale funzione consente l’individuazione della
scelta ottimale in accordo al proprio schema di preferenze.
Critiche di varia natura sono state rivolte al criterio dell’utilità attesa. Esse possono
essere comunque ridotte e sintetizzate nei due punti seguenti:
1. quelle rivolte all’evidenza empirica degli assiomi di comportamento
razionale che sono alla base della moderna teoria dell’utilità;
2
Per un approfondimento dell’argomento si può utilmente consultare, tra gli altri, Chiandotto e Bacci (2015).
368
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
2. quelle che sottolineano l’impossibilità pratica di derivare una funzione di
valore o di utilità significativa.
Alle critiche richiamate al punto 2 sono state fornite risposte che, nella generalità dei
casi, risolvono il problema dell’elicitazione della funzione di utilità in modo
soddisfacente3.
Per quanto riguarda, invece, le critiche richiamate al punto 1 si può rispondere che
esse hanno, ma non sempre, una certa rilevanza quando si considera il comportamento
di un agente e si voglia poi accertare fino a che punto egli segue le linee di
comportamento razionale attribuitegli. Quando però dal piano di verifica empirica di
una teoria, intesa in senso unicamente descrittivo, si passa al piano normativo della
stessa, tali critiche perdono, almeno in parte, di significato.
Il problema della rilevanza degli assiomi sul comportamento del decisore, va visto,
non nel senso di buona descrizione ma in quello di buona norma. Un tale problema
risulta però estremamente delicato in quanto, come già sottolineato, le implicazioni
normative degli assiomi, e quindi la bontà degli stessi, vanno giudicate in funzione dei
risultati operativi cui conduce la teoria che su di essi è fondata.
Qualunque decisione comporta una scelta tra più alternative, o azioni, o atti, ciascuna
delle quali produrrà una tra più conseguenze che dipenderà dalle condizioni del
contesto, lo stato di natura, nel quale il processo decisionale si svolge. Le decisioni,
sono, pertanto, costituite da azioni, stati e conseguenze, con le ultime che dipendono,
nella generalità dei casi, dallo stato di natura e dall’azione scelta.
Quando si analizza un problema di decisione, l’analista, che può essere lo stesso
soggetto che prende la decisione, deve individuare l’insieme rilevante delle azioni, degli
stati e delle conseguenze per caratterizzare in modo adeguato il problema stesso.
Attraverso l’individuazione di azioni, stati e conseguenze e costruendo, eventualmente,
una tavola o un albero di decisione, si procede alla specificazione del problema
decisionale.
Alcune interessanti questioni sono legate alla specificazione di un problema
decisionale. La prima riguarda la descrizione appropriata degli stati di natura. Ogni
problema decisionale implica delle conseguenze che il soggetto della decisione
considera migliori di altre, altrimenti non sussisterebbe un problema di scelta. In questo
contesto assume particolare rilevanza il principio della dominanza secondo il quale
devono essere escluse tutte le alternative che comportano conseguenze peggiori,
qualunque sia lo stato di natura, di una qualche specifica alternativa. Se c’è
un’alternativa che domina tutte le altre, il principio di dominanza porta a scegliere tale
alternativa ed il problema decisionale è risolto in modo ottimale. Sfortunatamente casi
del genere si riscontrano molto raramente nelle situazioni reali.
Una seconda interessante questione legata alla specificazione del problema
3
Si tratta di critiche analoghe a quelle rivolte all’approccio bayesiano soggettivo. In tale approccio, come illustrato
nel capitolo precedente, alla misura delle probabilità a priori si perviene attraverso una traduzione soggettiva delle
proprie conoscenze, cioè al patrimonio informativo disponibile al momento in cui si procede all’analisi dei dati
campionari (conoscenza oggettiva).
369
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
decisionale è quella relativa alla distinzione tra decisione giusta e decisione razionale,
la decisione di chi agisce è giusta se si risolve in esiti ottimali. Se si disponesse di una
conoscenza completa del futuro basterebbe, pertanto, fare riferimento al solo principio:
prendi la decisione giusta. Purtroppo la maggior parte delle decisioni è basata sul ciò
che si ritiene possa accadere e non su quello che accadrà realmente. Nella quasi totalità
dei casi risulta quindi impossibile prendere una decisione giusta, si dovrà allora
prendere una decisione razionale, valutando al meglio l’insieme parziale di informazioni
a disposizione riguardo al vero stato del mondo, e non è affatto scontata l’equivalenza:
decisione razionale = decisione giusta.
Da quanto sopra detto emerge implicitamente una diversificazione tra situazioni
decisionali.
Usualmente si distinguono le decisioni a seconda del contesto informativo in cui
l’agente opera in:
1.
decisioni in situazioni di certezza
2.
“
“
“
“ rischio
3.
“
“
“
“ incertezza
Se con A a1 , a2 ,..., ai ,..., am si indica l’insieme delle decisioni (azioni) alternative
possibili, con 1 ,2 ,..., j ,...,n l’insieme dei possibili stati di natura e con
C c11 ,c12 ,...,cij ,...,cmn l’insieme delle conseguenze, dove le conseguenze cij sono
funzione dell’azione a i e dello stato j
cij f ( ai , j )
per i=1, 2, ..., m ; j=1, 2, ..., n
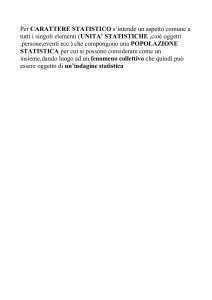
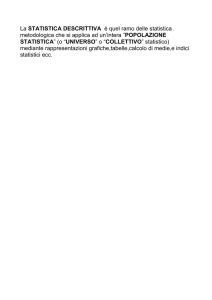
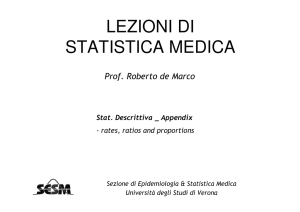
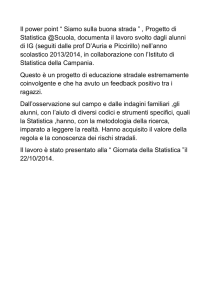
si può rappresentare il processo decisionale (dove è stato ipotizzato un numero discreto
di alternative ed un numero discreto di stati di natura) in modo appropriato facendo
ricorso alla tavola di decisione o all’albero di decisione:
Azione
Stato di natura
P 1 P 2
P j
P n
a1
c11
c12
c1 j
c1n
a2
c21
c22
c2 j
c2 n
ai
ci1
ci 2
cij
cin
am
cm1
cm 2
cmj
cmn
Tab. 7.1 – Tavola di decisione
370
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
c11
1
2
c12
.
.
j
.
c1j
.
n
.
.
c1n
c21
a1
1
2
c22
.
.
j
.
n
a2
c2j
.
.
c2n
.
.
.
Nodo
decisionale
.
ci1
ai
.
.
.
1
2
ci2
.
.
j
am
Azioni
.
n
.
cij
.
.
cin
cm1
1
2
.
j
.
Nodo
aleatorio
n
cm2
.
.
cmj
.
.
cmn
Stati
Conseguenze
Fig. 7. 1 - Albero di decisione
7.2 - Decisioni basate sulle sole informazioni a priori
Se l’agente, il decisore, conoscesse lo stato di natura, ad es.: j , il problema di scelta si
ridurrebbe al confronto tra m conseguenze (nell’es. c1 j ,c2 j ,...,cij ,...,cmj ) e la scelta
razionale equivarrebbe alla scelta giusta, sempre che siano note le conseguenze ed il
decisore sia in grado di esprimere, in modo razionale, le sue preferenze riguardo alle
conseguenze stesse. Il comportamento razionale consente, in altre parole,
371
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
l’individuazione dell’alternativa ottimale che comporta il conseguimento del massimo
beneficio.
Il problema di decisione introdotto può, pertanto, essere rappresentato nel modo
seguente:
Azioni Conseguenze
c1
a1
a2
c2
:
:
ai
:
:
ci
:
:
am
:
:
cm
dove con A, ai A, si indica lo spazio o insieme delle azioni e con C, ci C, lo spazio o
insieme delle conseguenze.
Come già sottolineato in precedenza, le considerazioni che s’intendono svolgere
riguarderanno esclusivamente la teoria normativa delle decisioni; si considererà, cioè,
la teoria che si preoccupa di definire come le decisioni dovrebbero essere prese dagli
individui al fine di massimizzare il proprio benessere; essa, quindi, non fa riferimento ai
comportamenti effettivamente osservabili nella realtà ma fa riferimento ad un individuo
“idealmente razionale” e deduce, sulla scorta di assiomi e attraverso la dimostrazione di
teoremi, un insieme di regole di comportamento cui l’individuo stesso deve uniformarsi.
7.2.1 Assiomi di comportamento razionale (parte I)
Dato l’insieme di conseguenze C c1, c2 ,..., cm e le relazioni di preferenza , , 4 ,
si possono definire i seguenti assiomi, esplicativi di un comportamento razionale:
Assioma 1: Comparabilità
ci , c j C, ci c j oppure c j ci oppure sono vere entrambe
Assioma 2: Transitività
ci , c j , ck C , se ci c j e c j ck ci ck
Assioma 3: Coerenza tra indifferenza e preferenza debole
ci , c j C : ci cj (ci cj e cj ci)
4
La relazione di preferenza forte
(a
b sta a significare che l'agente - il decisore - preferisce strettamente
l'alternativa a all'alternativa. b). La relazione di preferenza debole (a b sta a significare che l'agente - il
decisore - preferisce debolmente l'alternativa a all'alternativa b). La relazione di indifferenza (a b sta a significare
che le due alternative forniscono all'agente - il decisore - esattamente lo stesso beneficio).
372
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
Assioma 4: Coerenza tra preferenza forte e preferenza debole
ci , c j C : ci c j cj ci
La rilevanza degli assiomi emerge con tutta chiarezza quando se ne evidenziano le
implicazioni operative. La confrontabilità implica la necessità per il decisore di operare,
comunque, una scelta tra due alternative anche se questa, in base al terzo assioma, può
comportare indifferenza tra le stesse. La transitività e gli assiomi di coerenza
rispondono a una richiesta di non contraddittorietà tra le preferenze espresse.
Se i quattro assiomi sono soddisfatti, valgono i teoremi sotto riportati5.
Teorema 1 (Esistenza della funzione di valore).
Per ogni insieme finito di oggetti (conseguenze) C={c1,c2, ...,cm} sul quale
viene introdotta una relazione che soddisfa gli assiomi 1 - 4 esiste, e può
essere costruita, una funzione a valori reali espressi in scala ordinale V(.)
tale da soddisfare la relazione
ci cj V(ci ) V(cj ).
Il teorema 1 stabilisce l'esistenza di una funzione a valori ordinali perfettamente
equivalente allo schema di preferenze del decisore.
Teorema 2 (Unicità della funzione di valore).
Per ogni insieme finito di oggetti (conseguenze) C={c1,c2, ...,cm} sul quale
viene introdotta una relazione
che soddisfa gli assiomi 1 - 4, esistono due
funzioni di valore V(.) e W(.) che soddisfano le relazioni
ci cj V(ci ) V(cj ) e ci cj W(ci ) W(cj )
se e solo se V()=h(W(.)) dove h(.) è una funzione monotona crescente.
Il teorema 2 stabilisce che la funzione a valori reali espressi in scala ordinale è
unica a meno di una trasformazione monotona crescente.
Per lo sviluppo successivo della trattazione risulta conveniente introdurre una nuova
relazione tra oggetti, la relazione di scambio.
Definizione - La relazione di scambio (a b sta ad indicare la cessione di b per
avere in cambio a. Una generica relazione di scambio si indica con (ci cj) e si legge:
“lo scambio di cj con ci, vale a dire la cessione di cj per ottenere ci”. Anche sulle
relazioni di scambio ha senso introdurre le relazioni di preferenza forte, di preferenza
debole e di indifferenza (per distinguerle dalle analoghe relazioni sugli oggetti saranno
indicate con una “s” come pedice, s , s ,s).
7.2.2 Assiomi di comportamento razionale (parte II)
Assioma 5: Ordinamento debole
5
La dimostrazione dei teoremi è riportata, tra gli altri, in Chiandotto e Bacci (2004 e 2015).
373
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
Sia la relazione che la relazione s soddisfano gli assiomi 1 – 4
Assioma 6: Coerenza tra e s
ci, cj, ck C: ci cj (ci cj ) s (ck ck ) ck C
Assioma 7: Coerenza interna della relazione di scambio
a) (ci cj ) s (ck cz ) (cz ck ) s (cj ci ).
b) (ci cj ) s (ck cz ) e (cj cl ) s (cz cy ) (ci cl ) s (ck cy ).
Assioma 8: Solvibilità
a) ci, cj, ck C y C tale che: (y ci ) s (cj ck )
b) ci, cj C y C tale che: (ci y ) s (y cj )
Assioma 9: Proprietà Archimedea
Ogni sequenza standard strettamente limitata è finita
cn ; cn cn1 s c1 c0 ,
cn / y
dove indica il condizionamento alle relazioni che lo seguono; nel caso particolare che
si sta trattando y cn significa che la sequenza è strettamente limitata e (cn c(n-1)) s
(c1 c0) implica che (c1 c0) s (c2 c1) s (c3 c2) s … s (cn c(n-1)), ossia che
la sequenza è standard.
Se gli assiomi fin qui elencati risultano soddisfatti valgono i seguenti teoremi.
Teorema 3 (Esistenza della funzione di valore misurabile)
Per ogni insieme finito di oggetti (conseguenze) C={c1,c2,...,cm} sul quale
vengono introdotte le relazioni
e s che soddisfano gli assiomi 5 - 9
esiste, e può essere costruita, una funzione misurabile a valori reali espressi
in scala di intervallo V(.) tale da soddisfare le relazioni
ci
(ci cj )
cj V(ci ) V(cj );
s (ch ck ) V(ci ) - V(cj ) V(ch ) - V(ck ).
Il teorema 3 stabilisce l'esistenza di una funzione di valore misurabile
perfettamente equivalente allo schema di preferenze del decisore.
Teorema 4 (Unicità della funzione di valore misurabile)
Per ogni insieme finito di oggetti (conseguenze) C={c1,c2,...,cm} sul quale
vengono introdotte le relazioni
e s che soddisfano gli assiomi 5 - 9,
esistono due funzioni espresse su scala di intervallo V(.) e W(.) che
soddisfano le relazioni
ci
(ci cj )
cj V(ci) V(cj);
s (ch ck ) V(ci) - V(cj) V(ch) - V(ck);
ci
cj W(ci) W(cj);
374
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
(ci cj )
s (ch ck ) W(ci) - W(cj) W(ch) - W(ck)
se e solo se V(.)=+ W(.) per 0.
Il teorema 4 stabilisce che la funzione di valore misurabile è unica a meno di una
trasformazione lineare positiva.
Se lo stato di natura non è noto ma si dispone di una misura della probabilità dei vari
stati di natura, si parla di decisioni in situazioni di rischio.
La tavola di decisione sopra riportata potrà essere riscritta nei termini seguenti
Probabilità degli stati di natura
P 2
.....
P n
c11
c1n
.....
c1n
a2
c 21
c 22
c2n
....
....
am
.....
.....
c m1
.....
.....
cm2
.....
.....
.....
Azioni
P1
a1
.....
.....
.....
c mn
7.2.3 Assiomi di comportamento razionale (parte III)
Assioma 10: Ordinamento debole
Ribadisce semplicemente che le preferenze del decisore sull’insieme delle lotterie
L l1 , l2 ,..., lm 6 obbediscono agli assiomi 1 - 4.
Assioma 11: Continuità
l1, l2, l3 L, se l1 l2 l3 p (con 0 p 1) tale che l2 p l1 + (1-p) l3 .
L’assioma risponde ad un’esigenza di continuità nelle preferenze. Ad esso sono state
mosse varie critiche di carattere logico: alcuni affermano che esistono “premi” per cui
nessun valore di p è tale, per il decisore, da consentire il rispetto della relazione di
indifferenza. Ad esempio, se la lotteria l3 ha come risultato unico possibile la morte del
decisore, questi preferirà sempre e comunque la lotteria l2. In realtà questa critica può
essere superata riconoscendo che ognuno di noi, ogni giorno, compie tante semplici
azioni che comportano pur sempre una possibilità di morire (per es., attraversare la
strada).
6
Se per convenienza, e senza perdere in generalità, si assume che
c1 c2 ........ cn una qualunque lotteria di
riferimento è espressa nella forma
c1 p cn p, c1 ; 0, c2 ; 0, c3 ;..........; (1 p), cn
dove
c1
è la conseguenza preferita a tutte le altre e
non banale deve essere
lotterie degeneri
c1 cn
cn
è la conseguenza meno preferita; affinché il problema risulti
. Si può osservare come le singole conseguenze possono essere interpretate come
cij 0, ci1 ; 0, ci 2 ;.........;0, ci ( j 1) ; 1, cij ; 0, ci ( j 1) ;.........; 0, cim .
375
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
Assioma 12: Monotonia
Date due lotterie l1 e l2 L e tali che l1 l2 e due probabilità p e p’, allora
(l1 p l2) (l1 p’ l2) p p’
In altre parole, il decisore sceglierà sempre la lotteria che gli dà la probabilità più alta di
ottenere il risultato preferito.
Assioma 13: Riduzione delle lotterie composte
Sia data la lotteria composta l = (q1, l1; q2, l2; …..; qs, ls), avente, quindi, come premi le
lotterie semplici l1, l2, …, ls e dove lj = (pj1, c1; pj2, c2;…..; pjr, cr) con j = 1, 2, …, s è la
generica lotteria premio.
Sia, poi, l’ la lotteria semplice (p1, c1; p2, c2; …; pr, cr), dove pi = q1p1i + q2 p2i + …..+
qs psi per i = 1, 2, …r, allora l l’.
Assioma 14: Sostituzione o cancellazione
Siano ci , c j C tali che ci ~ c j ; siano, poi, l ed l’ due lotterie, semplici o composte,
tali che
l = (……;q, ci ;……)
l’ = (……; q, c j ; ……)
allora l l’
Assioma 15: Indipendenza
Dati ci , c j , ch C tali che ci ~ c j (ci p ch ) ~ (c j p ch )
Il rispetto degli assiomi 1-15 di comportamento razionale sopra riportati consente di
dimostrare l’esistenza e l’unicità della funzione di utilità di un generico soggetto
decisore.
Teorema 5 (Esistenza della funzione di utilità)
Se le preferenze di un individuo sull’insieme C obbediscono agli assiomi 1–15,
allora esiste una funzione di utilità u definita su C tale che:
a) ci cj u(ci ) u(cj )
ci, cj C (Proprietà di ordinabilità)
(p1, c1; p2, c2; ….; pr, cr) (p’1, c1; p’2, c2; ….; p’r, cr)
b)
u(p1, c1; p2, c2; ….; pr, cr ) u(p’1, c1; p’2, c2; ….; p’r, cr )
p1u(c1) + p2 u(c2) + …..+ pr u(cr) p’1u(c1) + p’2 u(c2) + …..+ p’r u(cr)
r
r
i 1
i 1
pi uxi pi' uxi (Proprietà di linearità).
Il teorema 5 stabilisce l'esistenza di una funzione di utilità perfettamente
equivalente allo schema di preferenze del decisore.
Teorema 6 (Unicità della funzione di utilità)
Se u è una funzione di utilità su C, allora w u con > 0 è
anch’essa una funzione di utilità che rappresenta lo stesso schema di
preferenze. Analogamente, se u(.) e w(.) sono due funzioni di utilità su C
376
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
che rappresentano lo stesso schema di preferenze, allora esistono un > 0 e
un tali che w u .
Il teorema 6 afferma, dunque, che per ogni individuo esiste una ed una sola
funzione di utilità a meno di trasformazioni lineari positive.
Un individuo razionale (che soddisfa cioè gli assiomi 1 - 15 per ottenere il massimo
beneficio sceglierà l’azione a cui egli associa, in base al suo schema di preferenze,
l’utilità attesa maggiore. Cioè l’alternativa a* che soddisfa la relazione
n
m
a* argmax P j uij
i 1
J 1
dove uij u ai , j è una funzione a valori reali detta di utilità. Pertanto, il criterio di
decisione ottimale è quello della massimizzazione dell’utilità attesa.
7.3 - Decisioni in situazioni di estrema incertezza
Se non si dispone di alcuna informazione sulla probabilità dei vari stati di natura, si
parla di decisioni in situazioni di incertezza.
Alcuni autori, quelli che si richiamano alla scuola bayesiana-soggettivista, non
accettano la tripartizione sopra richiamata in quanto ritengono, non solo possibile, ma
anche necessario, per una risoluzione ottimale dei problemi decisionali, procedere
all’introduzione di una misura della plausibilità (probabilità soggettiva) dei vari stati di
natura facendo così cadere la distinzione tra situazioni di rischio e situazioni di
incertezza.
Su questo punto si avrà modo di ritornare successivamente, qui si accoglie la
possibilità dell’esistenza di situazioni che possono essere definite di estrema incertezza
o di ignoranza assoluta, nelle quali non si può o non si vuole procedere alla misura
della plausibilità dei vari stati di natura.
Si supponga ora che le conseguenze siano esattamente definite, che siano espresse in
termini di utilità
yij cij u (ai , j )
per i=1, 2, ..., m ; j=1, 2, ..., n
e che ragionevolmente, un’utilità più elevata sia preferita ad una utilità più bassa.
L’azione ottima è, pertanto, quella cui corrisponde l’utilità più elevata. Quindi, nel
caso in cui il decisore si trova ad operare in situazioni di certezza, cioè di conoscenza
dello stato di natura, il problema decisionale è praticamente risolto: basterà, infatti,
scorrere la colonna delle utilità, individuare la più elevata e scegliere l'azione
corrispondente a tale valore.
Molto più problematico è il caso in cui il decisore si trova ad operare in situazioni di
estrema incertezza. Infatti, se si guarda alla Tab. 7.2, dove ai simboli algebrici cij sono
stati sostituiti i simboli y ij , che rappresentano le utilità, si vede chiaramente come, non
essendo noto lo stato di natura, non sia possibile operare il confronto tra i valori
numerici riportati nella tavola a meno che non ci si riconduca ad una situazione analoga
377
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
a quella prospettata in precedenza (situazione di certezza) dove ad ogni azione diversa
corrisponde un solo valore numerico; si tratta, in altre parole, di passare, in qualche
modo, da n colonne ad una sola colonna.
Azione
Stato
di natura
a1
a2
ai
am
θ1
θ2
θj
θn
y11
y21
yi1
ym1
y12
y22
yi2
ym2
y1j
y2j
yij
ymj
y1n
y2n
yin
ymn
Tab. 7.2 - Tavola di decisione con conseguenze espresse in termini di utilità
Il caso in cui l’agente non sia in grado o non voglia assegnare una distribuzione di
probabilità agli stati di natura s’incontra frequentemente in pratica. Risulta quindi
conveniente una breve rassegna dei criteri di decisione suggeriti per la risoluzione del
problema di scelta in tali situazioni (di estrema incertezza). Per semplificare
l’esposizione, senza perdere in generalità, ci si limiterà ad analizzare il caso discreto.
Tra i criteri suggeriti per la soluzione del problema di decisione in situazioni di
estrema incertezza assumono un certo rilievo: quelli che, grosso modo, fondano il
criterio di decisione su elementi caratteristici (ad esempio la realizzazione più
favorevole, quella meno favorevole, ecc.) della Tab. 7.2.
1. Criterio del max-min o criterio di Wald. Esso consiste nello scegliere l’azione a*
che corrisponde al massimo delle utilità minime
a* argmax (min yij )
i
j
Questo criterio è proprio del pessimista estremo il quale è convinto che, qualunque
azione egli scelga, si realizzerà sempre quello stato di natura (condizioni strutturali,
economiche di produzione e di mercato, di lavoro, ecc.) che gli permetterà il
conseguimento del beneficio minimo. Quindi, egli si premunirà contro la natura
cercando di ottenere il massimo, tra i benefici minimi, che essa è disposta a
concedere.
2. Criterio del max-max. All’opposto del pessimista estremo c’è l’estremo ottimista, ed
è colui il quale ritiene che qualunque sia l’azione prescelta, la natura sarà tanto
378
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
benigna nei suoi confronti da concedere il beneficio massimo. La scelta ottimale
risulta dalla relazione
a* argmax (max yij )
j
i
3. Criterio di Hurwicz. Considerando l’espressione
a* argmax
i
min y (1 ) max y
j
ij
j
ij
per compreso tra zero ed uno, si deriva un criterio intermedio ai due sopra esposti.
L’ assume quindi il senso di indice di pessimismo; infatti, per = 1 si ha il criterio
del max-min, per = 0 si ha il criterio del max-max.
4. Criterio di Savage o del min-max rimpianto. Per applicare il criterio di Savage,
occorre sostituire agli elementi di ciascuna colonna della Tab. 2 la differenza tra
l’elemento che ha valore massimo e l’elemento che occupa quella posizione
rij max yij yij
i
scegliendo poi l’azione a* per la quale il massimo rimpianto assume valore minimo
a* argmin (max rij )
j
i
Attraverso il criterio del min-max rimpianto l’operatore cerca di minimizzare i danni
di una decisione errata.
I quattro criteri di decisione presentati hanno tutti un certo carattere di accettabilità:
naturalmente gli argomenti che possono essere avanzati a sostegno dell’uno o dell’altro
criterio, sono di natura diversa, il che in effetti non presenta gravi inconvenienti.
L’aspetto più problematico riguarda invece l’applicazione dei quattro criteri: infatti
se essi vengono adottati in uno stesso problema di decisione ne può risultare una scelta
di quattro azioni differenti. Da alcuni autori tale fatto è stato preso a pretesto per
affermare che uno o più criteri devono essere necessariamente errati. Non sembra
comunque che esistano ragioni sufficienti a sostegno di tale punto di vista; pare invece
più giusta l’affermazione che tutti i criteri proposti hanno una portata applicativa
limitata, e che a seconda delle circostanze dovrà essere adottato il criterio più
opportuno.
Un ulteriore criterio cui si fa riferimento quando si deve operare in situazioni di
estrema incertezza è il cosiddetto criterio di Laplace o criterio della ragione
insufficiente. Il criterio di Laplace individua quale azione migliore a* quella cui
corrisponde il massimo della somma
a* argmax
i
n
y
j 1
ij
In base al criterio di Laplace, si attribuisce implicitamente a tutti gli stati di natura j
uguale probabilità; ciò viene fatto in quanto non si hanno motivi sufficienti per ritenere
379
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
che la distribuzione delle probabilità sia diversa da quella uniforme. Evidentemente una
tale giustificazione risulta del tutto insoddisfacente perché non sono chiari i motivi per i
quali lo stato d’ignoranza completa debba implicare necessariamente un’uguale
probabilità degli stati di natura. Pertanto, o si prende atto che si sta operando in
situazioni di estrema incertezza, e cioè di ignoranza completa riguardo alla plausibilità
(probabilità) dei vari stati di natura, e si agisce di conseguenza, oppure si dovrà
procedere esplicitamente alla valutazione (soggettiva) 7 delle probabilità attraverso
procedure adeguate. In realtà, anche negli altri criteri si opera una sorta di introduzione
indiretta delle probabilità, ma si tratta comunque di una assegnazione di probabilità che
dipende più dalle azioni che dagli stati di natura. Infatti, se si considera, ad esempio, il
criterio del max-max, questo si risolve, in sostanza e distintamente per ciascuna azione,
nell’attribuzione di una distribuzione degenere di probabilità che assegna valore 1 alla
probabilità dello stato di natura cui corrisponde la conseguenza più favorevole, mentre
nel criterio del max-min si assegna valore 1 alla probabilità dello stato di natura cui
corrisponde la conseguenza più sfavorevole.
7.4 - Struttura del processo decisionale
In questo paragrafo, e nei due paragrafi successivi, verranno presi in considerazione gli
aspetti più elementari della teoria statistica delle decisioni seguendo gli schemi classici
introdotti da A. Wald nel 19508.
Si ricorda che nelle pagine precedenti sono stati analizzati i problemi decisionali in
situazioni di estrema incertezza (nessuna informazione sugli stati di natura) e in
situazioni di rischio o incertezza presupponendo la conoscenza della distribuzione delle
probabilità sugli stati di natura (decisioni basate sulle sole informazioni a priori),
verificando che, nel contesto della teoria dell’utilità classica, l’azione ottima per il
decisore è quella che massimizza l’utilità attesa.
Il decisore deve scegliere tra una gamma di azioni alternative possibili ma le
conseguenze di ciascuna azione dipendono da una situazione reale detta stato di natura.
Il decisore, sia in situazioni di estrema incertezza (mancanza assoluta di informazioni
sulle probabilità relative allo stato di natura), sia in quelle di rischio (conoscenza della
distribuzione di probabilità sugli stati di natura), può procedere nella scelta oppure
decidere di rinviare la scelta definitiva dell’azione procedendo all’acquisizione di
ulteriori dati (di tipo campionario). Si sottolinea in proposito che l’acquisizione di dati
comporta usualmente un costo che potrebbe non risultare compensato dal guadagno
informativo; ma sul valore dell’informazione campionaria si avrà modo di soffermare
l’attenzione successivamente.
Le diverse tipologie di problemi decisionali da affrontare e risolvere sono pertanto
di:
7
8
Su queste problematiche si veda quanto è stato detto nel capitolo precedente.
L'argomento viene trattato estesamente in Ferguson (1967), De Groot (1970), Berger (1985) e Piccinato (1996),
380
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
decisione in assenza assoluta di informazioni (teoria classica delle
decisioni);
decisione basata sulle sole informazioni a priori (teoria bayesiana delle
decisioni);
decisione basata sulle sole informazioni campionarie (teoria statistica
classica delle decisioni);
decisione basata su informazioni campionarie e informazioni a priori
(teoria statistica bayesiana delle decisioni).
Nel paragrafo successivo verrà affrontato il terzo problema, quello cioè della
risoluzione di problemi decisionali basandosi sulle sole informazioni campionarie, ma
prima di procedere nella illustrazione risulta conveniente una elencazione dei fattori che
entrano in gioco e che possono caratterizzare i problemi decisionali in tutte le loro
possibili articolazioni.
Gli elementi che possono caratterizzare lo svolgimento di un qualunque processo
decisionale, sia in termini di spazi di riferimento che di funzioni, nelle diverse
strutturazioni e fattispecie operative, sono:
spazio parametrico o spazio degli stati di natura; in molte situazioni
tale spazio è Rh e può trattarsi sia di uno spazio discreto che di uno spazio
continuo;
A spazio delle azioni finali (si assume che lo spazio sia discreto);
E spazio delle prove o degli esperimenti (si assume che lo spazio sia
discreto);
S spazio o universo dei campioni come risultato di ciascun
esperimento. Generalmente i risultati campionari vengono espressi da n
(dimensione campionaria) k-uple, se k sono i caratteri presi in
considerazione di numeri reali X1 , X 2 ,..., X i ,..., X n dove X i , i = 1, 2,
….,n, è un vettore di dimensione k;
D spazio delle decisioni.
In aggiunta agli spazi appena definiti risulta conveniente introdurre esplicitamente
almeno tre funzioni:
la funzione di utilità U u a, , definita in precedenza, la funzione
associa a ciascuna azione e stato di natura una conseguenza espressa in
termini di utilità;
la funzione di decisione a d x , funzione che proietta ciascun punto
dello spazio campionario nello spazio delle azioni 9;
9
Una regola di decisione (funzione di decisione) si dice semplice o non aleatoria se ad ogni punto
corrisponde un solo punto
a A
a A , mista od aleatoria se ad ogni punto x S
xS
corrisponde una gamma di punti
cui è associata una distribuzione di probabilità. Da rilevare che le regole di decisione semplici si ottengono
come caso particolare di quelle miste quando lo spazio delle probabilità è degenere.
381
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
la funzione di perdita L l a, , la funzione associa a ciascuna azione e
stato di natura una conseguenza espressa in termini di perdita.
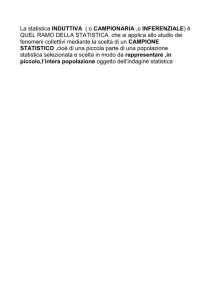
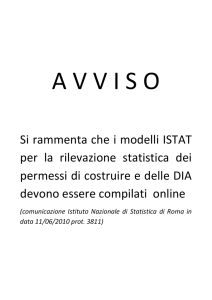
Le relazioni tra i diversi elementi sopra definiti sono illustrate nella Fig. 7.2 dove è
riportata la struttura completa del processo decisionale le cui diverse articolazioni
saranno caratterizzate dalla presenza di specifici elementi e particolari relazioni: Ad
esempio, nella teoria classica delle decisioni (decisioni in situazioni di estrema
incertezza), entrano in gioco soltanto lo spazio degli stati di natura, lo spazio delle
azioni e lo spazio delle conseguenze (espresse in termini di utilità o di perdite).
Spazio delle
decisioni
D
Spazio degli
esperimenti
Spazio dei
campioni
x
E
S
d x
Spazio delle azioni
A
a
Spazio
parametrico
(Stato di natura)
Verosimiglianza
f x ,
Θ
Utilità
U a,
o
Perdite
Probabilità a posteriori
P / x
Probabilità a priori
La,
Fig. 7.2 - Struttura del processo decisionale
L’introduzione della funzione di perdita L l a, (loss) consente la trattazione
della teoria statistica delle decisioni nei termini più tradizionali secondo l’impostazione
originaria data da Wald e che risulta più consona al tipico ragionamento statistico. A
sostegno di tale affermazione basta fare riferimento ai problemi classici di stima
statistica puntuale e di test delle ipotesi. Nel primo caso si ricorda che, una delle
proprietà “augurabili” per lo stimatore ˆ T X di è l’efficienza che
tradizionalmente viene misurata attraverso il computo dell’errore quadrato medio
qualunque sia il vero valore del parametro
ˆ * T x min E
T X min EQM ˆ
2
382
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
basterà interpretare EQM ˆ come funzione di perdita che si vuol minimizzare. Nella
teoria del test delle ipotesi, fissata la probabilità di commettere un errore di I tipo si
cerca di minimizzare la probabilità di commettere un errore di II tipo; in questo caso, la
perdita che si vuol minimizzare è rappresentata dalla probabilità dell’errore di secondo
tipo.
Se si ragiona in termini di perdite, interpretate semplicemente come utilità negative,
si può riproporre la tabella di decisione esprimendo le conseguenze cij in termini di
perdite cij l ai , j lij anziché in termini di utilità cij uai , j uij .
Decisioni
Stato di natura
1
2
……
d1
l d1 ,1
l d1 ,2
……
d2
l d 2 ,1
l d 2 ,2
....
.....
.....
di
l di ,1
l di ,2
....
.....
.....
dm
l d m ,1
l d m ,2
j
l d1 , j
l d 2 , j
l di , j
l d m , j
.....
n
.....
l d1 ,n
.....
.....
…..
.....
.....
l d 2 ,n
.....
l di ,n
.....
l d m ,n
Tab. 7.3 - Tavola di decisione con conseguenze espresse dalla funzione di perdita
Se il decisore opera in condizioni di estrema incertezza, cioè nelle situazioni nelle
quali non possiede informazioni sulla distribuzione di probabilità degli stati di natura, o
non vuole utilizzare quelle in suo possesso perché poco affidabili, per risolvere il
problema di scelta dovrà fare ricorso ad uno dei criteri proposti per risolvere i problemi
decisionali in situazioni di estrema incertezza. illustrati nel paragrafo precedente.
Di seguito vengono riproposti tre dei criteri introdotti considerando le perdite
lij l ai , j anziché le utilità) uij l ai , j .
Criterio del min-max o criterio di Wald. Esso consiste nello scegliere l’azione a* che
corrisponde al minimo della massima perdita
a* argmin( max lij )
i
j
Come già sottolineato questo criterio è proprio del pessimista estremo il quale è
convinto che, qualunque azione egli scelga, si realizzerà sempre quello stato di natura
cui è collegata la perdita massima.
Criterio del min-min. All’opposto del pessimista estremo c’è l’estremo ottimista, ed è
colui il quale ritiene che qualunque sia l’azione prescelta, la natura sarà tanto
383
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
benigna nei suoi confronti da concedere la perdita minima. La scelta ottimale risulta
dalla relazione
a* argmin ( min lij )
j
i
Criterio di Hurwicz.
a* argmin α max lij + (1 - α) min lij
i
j
j
per compreso tra zero ed uno, si deriva un criterio intermedio ai due sopra esposti.
L’ assume quindi il senso di indice di pessimismo; infatti, per = 1 si ha il criterio
del min-max, per = 0 si ha il criterio del min-min.
Se il decisore opera in condizioni di rischio, cioè nel presupposto che sia nota la
distribuzione delle probabilità sugli stati, soddisfacendo i postulati di comportamento
razionale sopra illustrati, il problema decisionale ha una soluzione immediata; infatti,
basterà sostituire il principio di massimizzazione dell’utilità attesa con quello della
minimizzazione della perdita attesa: Pertanto l’azione ottimale a * è definita dalla
relazione
n
a* argmin E l ai , j argmin l ai , j P j
ai
ai
i 1
Come già sottolineato, per risolvere il problema decisionale in situazioni di estrema
incertezza, degli elementi sopra definiti e riproposti in forma grafica nella Fig. 7.2,
quelli da considerare sono:
la funzione di perdita e il corrispondente spazio delle conseguenze;
lo spazio delle azioni;
lo spazio degli stati di natura;
mentre, per risolvere il problema decisionale in situazioni di rischio, degli elementi
sopra definiti e riproposti in forma grafica nella Fig. 7.1, quelli da considerare sono:
la funzione di perdita e il corrispondente spazio delle conseguenze;
lo spazio delle azioni;
lo spazio degli stati di natura;
la distribuzione delle probabilità (a priori) sugli stati di natura.
7.5 - Decisioni basate sulle sole informazioni campionarie
Nelle due situazioni prospettate nel paragrafo precedente, l'operatore può procedere
all'individuazione dell'azione a*, nell'insieme potenziale delle azioni A, ritenuta ottimale
(attraverso l’impiego di uno dei criteri di decisione elencati, se si opera in condizioni di
estrema incertezza, quella che minimizza la perdita attesa, se si opera in situazioni di
rischio o incertezza), alternativamente, come già sottolineato, può decidere di acquisire
informazioni sullo stato di natura predisponendo un particolare esperimento da scegliere
384
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
dalla famiglia E di esperimenti potenziali. Da notare che qui l'esperimento va inteso in
senso ampio, includente cioè tutti i casi di acquisizione di dati quali la rilevazione
mediante indagine campionaria, la predisposizione di un esperimento in senso classico,
la raccolta di dati già pubblicati, lo spoglio di schede contenenti le manifestazioni di
certi fenomeni, ecc..
Ovviamente, l’acquisizione di informazioni campionarie, oltre a collocare il processo
decisionale nel contesto statistico (dalla teoria delle decisioni alla teoria statistica delle
decisioni), può comportare un costo che potrebbe non essere compensato dalla
riduzione dell’incertezza. Sorge così un nuovo problema decisionale che abbisogna di
soluzione; l’interrogativo a cui dare risposta è, quindi, se procedere o meno
all’acquisizione di informazioni campionarie il cui valore (e convenienza) potrà essere
misurato soltanto a posteriori, cioè dopo aver realizzato l’esperimento ed acquisito le
informazioni. Il tema del valore dell’informazione campionaria verrà trattato nel
paragrafo 7.7, il paragrafo 7.6 sarà dedicato, invece, alla illustrazione delle
problematiche connesse alla integrazione delle informazioni a priori con informazioni
campionarie (teoria statistica bayesiana delle decisioni), mentre in questo paragrafo si
affronterà il tema della scelta ottimale tra le diverse alternative utilizzando le sole
informazioni campionarie (decisioni basate sulle sole informazioni campionarie: teoria
statistica classica delle decisioni).
Come già sottolineato, seguendo una tradizione ormai consolidata, la presentazione
farà riferimento alle perdite e non alle utilità; in proposito, si sottolinea ancora una volta
che la funzione di perdita non è altro che una particolare caratterizzazione della
funzione di utilità.
L’argomento verrà introdotto attraverso l’illustrazione di un problema decisionale
divenuto ormai classico in letteratura perché, nonostante la sua estrema semplicità,
consente una trattazione approfondita di tutti gli aspetti di interesse: si deve decidere se
non procedere (azione a1 ) o procedere (azione a 2 ) alla trivellazione di un pozzo non
disponendo di informazioni sulla presenza o meno del petrolio nel terreno. Se il petrolio
non è presente, lo stato di natura è 1 , se invece è presente, lo stato di natura è 2 , il
costo della perforazione è pari a 300mila $, gli introiti, in caso di presenza del petrolio,
sono pari a 900mila $; ovviamente l’introito in caso di assenza di petrolio è 0.
Il problema decisionale è proposto nella Tab. 7.4, dove si fa riferimento alle utilità, e
nella Tab. 7.5, dove le conseguenze sono espresse in termini di perdite.
Se il decisore conoscesse le probabilità (a priori), ad esempio P1 0.50 e
P 2 0.50 , ne risulterebbe un’utilità attesa pari a 0, in corrispondenza dell’azione a1 ,
mentre l’utilità attesa per a 2 è pari 150mila $, quindi la scelta ottimale è a* a2 . Per
contro, le perdite attese sarebbero, rispettivamente pari a 300mila $, per l’azione a1 , e
pari a 150mila $ per l’azione a 2 ; ovviamente, anche se si ragiona di termini di perdita si
individua a 2 come azione ottimale. L’esito peraltro risulta scontato; infatti se si ragiona
in termini di lotteria, puntando 300mila $ si ha una probabilità del 50% di ricevere la
385
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
propria posta triplicata. Ovviamente questa conclusione è valida solo presupponendo
una funzione di utilità lineare; un soggetto fortemente avverso al rischio potrebbe,
infatti, decidere di non procedere alla trivellazione.
Azioni
a1 : non perforare
a 2 : perforare
Stato di natura
1 : assenza di petrolio
2 :presenza di petrolio
0
0
-300
600
Tab. 7.4 - Tavola di decisione: problema di trivellazione con utilità come conseguenze
Azioni
a1 : non perforare
a 2 : perforare
Stato di natura
1 : assenza di petrolio
2 :presenza di petrolio
0
600
300
0
Tab. 7.5 - Tavola di decisione: problema di trivellazione con perdite come conseguenze
Gli aspetti concernenti l’influenza degli atteggiamenti individuali nei confronti delle
scelte decisionali emergono anche nelle situazioni nelle quali non si possiede alcuna
informazione sulle probabilità degli stati di natura. Infatti, se si fa riferimento alla Tab.
7.4 e si ricorre al criterio del max-min (pessimista) l’azione ottima risulta essere a1 ,
mentre il criterio del max-max (ottimista) individua a 2 come azione migliore. Nella
Tab. 7.5 si riportano le soluzioni del problema decisionale fornite dal criterio di Hurwitz
in corrispondenza di diversi valori assunti dal coefficiente (di pessimismo) .
L’equivalenza riscontrata tra gli esiti di questo criterio e quelli che derivano dal criterio
dell’utilità (perdita) attesa non è affatto generalizzabile a situazioni con stati di natura o
azioni superiori a due.
Osservando i dati riportati in tabella si rileva il valore dell’indice di pessimismo che
induce il decisore a modificare la propria strategia, la soglia comporta la scelta
dell’azione a1 (non trivellare) rispetto all’azione a 2 è 0.666 P 1 0.666 .
Cioè, se si fa riferimento alla massimizzazione dell’utilità attesa, si decide di procedere
alla trivellazione (azione a 2 ) se P 2 0.333 .
386
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
Valori dell’indice
di pessimismo
0
0,1
0,2
0,3
0,4
0,5
0,6
0,65
0,66
0,67
0,68
0,7
0,8
0,9
1
Azioni
a1 : non perforare
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
a 2 : perforare
600
510
420
330
240
150
60
15
6
-3
-12
-30
-120
-210
-300
Tab. 7.6 - Problema di trivellazione con utilità come conseguenze: criterio di Hurwitz
Si supponga che il decisore abbia la possibilità di acquisire,
informazioni sulla presenza o meno di petrolio nel terreno utilizzando
indipendenti. I possibili esiti dell’utilizzo dei sismografi sono riportati
l’informazione fornita dai sismografi non è certa, le probabilità
corrispondenza dei due diversi stati di natura sono riportati nella tabella.
Segnalazione
del sismografo
Assenza di petrolio
Presenza di petrolio
a costo zero,
due sismografi
nella Tab. 7.7;
di errore, in
Stato di natura
1 : assenza di petrolio
2 : presenza di petrolio
0.6
0.4
0.3
0.7
Tab. 7.7 – Probabilità dell’esito del sismografo condizionato allo stato di natura
Il decisore potrà decidere se trivellare o meno sulla scorta dell’informazione
campionaria acquisibile il cui esito può essere:
entrambi i sismografi indicano assenza di petrolio,
entrambi i sismografi indicano presenza di petrolio;
un sismografo indica presenza di petrolio mentre l’altro indica assenza.
387
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
Se con 0 si indica assenza di petrolio e con 1 presenza di petrolio, lo Spazio
campionario S sarà costituito dai quattro punti campionari:
S 0,0, 0,1, 1,0, 1,1
cui sono associate le probabilità:
P0,0 / 1 P0 / 1 P0 / 1 0.36
P0,0 / 2 P0 / 2 P0 / 2 0.09
P0,1 / 1 P0 / 1 P1 / 1 0.24
P1,0 / 1 P1 / 1 P0 / 1 0.24
P0,1 / 2 P0 / 2 P1 / 2 0.21
P1,0 / 2 P1 / 1 P0 / 2 0.21
P1,1 / 1 P1 / 1 P1 / 1 0.16
P1,1 / 2 P1 / 2 P1 / 2 0.49 .
I due punti campionari estremi indicano, rispettivamente, assenza di petrolio e
presenza di petrolio segnalata da entrambi i sismografi; mentre, i due punti intermedi
indicano che uno solo, dei due sismografi, segnala la presenza di petrolio. In sostanza si
è in presenza di tre punti campionari per due diversi stati di natura, quindi il numero
delle funzioni di decisione possibili è pari a 23 = 8: Si ricorda che la funzione di
decisione è una funzione che fa corrispondere ad ogni punto campionario una specifica
azione. Nella Tab. 7.8 è riportata l’esplicitazione delle 8 funzioni di decisione.
Punti campionari
0,0
0,1 o 1,0
1,1
d1
d2
Funzioni di decisione
d3
d5
d6
d4
a1
a2
a1
a1
a2
a1
a2
a1
a2
a1
a2
a2
a1
d7
d8
a1
a2
a2
a1
a2
a1
a2
a1
a2
a2
a1
Tab. 7.8 – Probabilità dell’esito del sismografo condizionato allo stato di natura
Se si analizza quanto riportato nella Tab. 7.8 si rileva immediatamente la scarsa
razionalità di alcune funzioni di decisione, ad es., le funzioni d 1 e d 2 individuano,
rispettivamente, l’azione a1 e l’azione a 2 qualunque sia l’esito campionario, mentre la
funzione d 5 individua l’azione a 2 (procedere alla trivellazioni) quando entrambi i
sismografi registrano assenza di petrolio, mentre individuano l’azione a1 (non procedere
alla trivellazione) quando uno o entrambi i sismografi registrano presenza di petrolio.
Prescindendo per il momento dalla ragionevolezza o meno delle funzioni di decisione,
si può procedere al calcolo delle perdite attese (rischi) associate a ogni funzione di
decisione in corrispondenza dei due diversi stati di natura. A titolo esemplificativo si
considera la funzione d 6 , la procedura di calcolo è illustrata nella Tab. 7.9.
388
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
1
2
Stato di natura 1
Punti
campionari
Azione
scelta
0,0
a1
0
Prob. del
campione
0.36
0,1 , 1,0 o
1,1
a2
300
0.64
Perdita
1
2
Stato di natura 2
600
Prob. del
campione
0.09
0
0.91
Perdita
Perdita attesa
(Rischio)
Col. 1 x Col. 2
1
2
Perdita attesa
(Rischio)
0
54
192
0
192
54
Tab. 7.9 – Calcolo delle perdite attese per la funzione di decisione d 6
Nella Tab. 7.10 sono riportate le perdite attese (rischi) per tutte le funzioni di
decisione introdotte.
Decisioni
Stati di natura
1 : assenza di petrolio
2 :presenza di petrolio
d1
0
600
d2
300
0
d3
144
348
d4
48
306
d5
108
546
d6
192
54
d7
252
294
d8
156
252
Tab. 7.10 – Tavola delle perdite attese (rischi)
Se si osserva la tabella si evince immediatamente che la natura del problema che il
decisore deve risolvere è sostanzialmente analoga a quella già esaminata in precedenza;
si tratta, cioè, di scegliere tra le 8 decisioni possibili quella che minimizza la perdita
attesa non avendo informazioni sulla probabilità degli stati di natura (situazione di
389
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
estrema incertezza) facendo però riferimento a perdite e decisioni anziché a utilità e
azioni.
Il primo passo da compiere è, quindi, quello della verifica della presenza di
un’eventuale decisione dominante, quella cioè caratterizzata da rischio minimo
qualunque sia lo stato di natura. Osservando i valori riportati nella Tab. 7.9 si verifica
l’assenza di una tale eventualità. Il secondo passo consiste nell’individuazione (e
successiva eliminazione) di eventuali decisioni dominate da altre, ed è questo il caso
delle decisione d 3 e d 5 , che risultano dominate dalla decisione d 4 , e della decisione
d 7 , che risulta dominata dalla decisione d 8 .
Tornando al problema decisionale nei suoi termini più generali si può affermare che
la decisone ottima per l’operatore è quella che minimizza la perdita (massimizza
l’utilità) per qualunque stato di natura e risultanza campionaria, ma una tale strategia
difficilmente si riesce a determinare nella pratica; qualora si riuscisse ad individuarla si
parlerebbe di strategia "uniformemente migliore".
Per superare le difficoltà relative alla determinazione della strategia "ottima" è stato
proposto, tra l’altro di restringere la classe delle decisioni ammissibili; si tratta di un
metodo che prevede l'esclusione di strategie che non soddisfano a determinati requisiti
ritenuti "augurabili" dall'operatore. Un tale modo di procedere consente da un lato
l'eliminazione dall'analisi delle strategie meno efficienti, dall'altro incrementa le
possibilità di esistenza di strategie uniformemente migliori, facilitandone
l'individuazione, nella classe ristretta.
Una delle condizioni che può essere considerata per restringere la classe delle
decisioni possibili è l'invarianza. A giustificazione di tale restrizione si può dire che se
un problema di decisione risulta simmetrico od invariante rispetto a certe operazioni,
sembra ragionevole restringere la classe delle decisioni possibili a quelle che siano
simmetriche od invarianti nei confronti delle stesse operazioni.
Restringere la classe delle decisioni possibili si sostanzia nella introduzione di
vincoli che devono essere soddisfatti dalle decisioni stesse. Si tratta, sostanzialmente, di
una procedura del tutto analoga a quella adottata nel contesto della regressione lineare:
infatti, in tale contesto, imponendo il soddisfacimento dei vincoli di linearità e
correttezza è stato possibile individuare lo stimatore ottimale, cioè, lo stimatore BLU .
Assegnando all’errore quadratico medio la natura di funzione di perdita, è stato
possibile individuare la strategia dominante.
Il tema della restrizioni della classe delle decisioni non verrà qui affrontato
procedendo, invece, alla generalizzazione di quanto discusso nell’esempio sopra
illustrato. Si farà riferimento ad un generico numero n di stati di natura, ad un generico
numero r di funzioni di decisione e ad un generico vettore casuale X X 1, X 2 ,...., X n
'
associato alla rilevazione campionaria frutto della conduzione di uno specifico
esperimento.
390
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
In questo contesto la generica funzione di decisione assume la forma
a d x1 , x2 ,...., xn d x ,
dove
x x1 , x2 ,...., xn
'
rappresenta
l’esito
dell’esperimento condotto (risultato campionario), cioè, la determinazione del vettore
casuale X X 1, X 2 ,...., X n . Pertanto la perdita attesa (rischio) resta definita dalla
'
relazione:
R d , R d x , Ex l d x , .
Relazione che per un vettore campionario relativo ad una variabile discreta diventa
R d , E x l d x , x l d x , P x /
x
1
x2
x l d x1 , x2 ,...., xn , f x1 , f x2 , ....... f xn ,
n
dove f xi , , per i=1,2,….,n, rappresenta la funzione di massa di probabilità della
variabile casuale X i associata all’i-esima unità campionaria.
Se le variabili casuali X i originano da una variabile casuale continua, l’espressione
algebrica del rischio (perdita attesa) è data da:
R d , E x l d x , l d x , P x /
x
x1
x2
...... l d x1 , x2 ,...., xn , f x1 , f x2 , ....... f xn , dx1dx2 .....dxn
xn
dove f xi , , per i=1,2,….,n, rappresenta la funzione di densità di probabilità della
variabile casuale X i associata all’i-esima unità campionaria.
La tavola di decisione che riassume i termini del problema decisionale (cfr. Tab.
7.11) è del tutto analoga alla Tab. 7.3, anche se ora è espressa in termini di funzioni di
decisioni e di rischi (perdite attese) anziché di perdite; pertanto, per risolvere il
problema decisionale, basterà fare ricorso ai criteri illustrati nel paragrafo 7.4.
Decisioni
Stato di natura
1
2
……
d1
Rd1 ,1
Rd1 , 2
……
d2
Rd 2 ,1
Rd 2 , 2
....
…………
…………
……
……
Rd i , 2
di
Rd i ,1
....
…………
…………
……
……
dr
R d r ,1
R d r ,2
……
j
Rd1 , j
Rd 2 , j
…………
Rd i , j
…………
R d r , j
.......
.......
n
Rd1 , n
Rd 2 , n
.......
.......
…………
…...
.......
…………
.......
R d r ,n
Rd i , n
Tab. 7.11 - Tavola di decisione con conseguenze espresse dai rischi (perdite attese)
391
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
7.6 - Decisioni basate su informazioni a priori e informazioni
campionarie
Nei paragrafi precedenti si è visto come l'operatore possa utilizzare l'insieme delle
probabilità a priori, che riflettono le sue "credenze" sulle possibilità di realizzazione dei
vari stati di natura, per determinare l'utilità attesa o, alternativamente, la perdita attesa
relativamente a ciascuna azione; è stato inoltre esaminato il caso in cui l'operatore,
prescindendo da ogni informazione a priori, utilizza le informazioni campionarie per il
computo del rischio. E' stato sottolineato anche il fatto che, generalmente, non è
possibile individuare una funzione di decisione capace di minimizzare il rischio in
corrispondenza di ciascuno stato di natura; cioè, nella generalità dei casi non esiste una
decisione dominante. A tale proposito è stata esaminata la possibilità di ricorrere con
opportuni adattamenti, ai criteri esposti nel paragrafo 7.4. Una seconda possibilità è,
ovviamente, quella d'introdurre una distribuzione di probabilità sugli stati di natura,
calcolando il rischio atteso, per poi procedere alla individuazione della decisione che
minimizza tale rischio atteso (decisione ottimale).
Evidentemente l'introduzione di una distribuzione di probabilità sugli stati di
natura attribuisce al problema decisionale un carattere completamente diverso da
quello discusso nel precedente paragrafo, assumendo una natura del tutto
analoga ad un problema decisionale nel quale l'operatore, disponendo di certe
informazioni a priori e non ritenendole sufficient i, decide di procedere
all’acquisizioni di dati aggiuntivi per incrementare il suo bagaglio di
conoscenze sul fenomeno in oggetto d’analisi.
In questo paragrafo si vedrà come l'applicazione del criterio (paradigma)
bayesiano alla tabella dei rischi conduca all’individuazione della decisione
ottimale; cioè, quella che minimizza il rischio atteso ( analisi in forma
normale). Si vedrà, inoltre, come l'operatore possa integrare, con le
informazioni aggiuntive di tipo campionario, le informazioni a priori mediante
una loro revisione attraverso l'applicazione delle formule di Bayes ( analisi in
forma estensiva) pervenendo agli stessi risultati. In proposito si deve
sottolineare che spesso la revisione delle probabilità a priori attraverso le
formule di Bayes può risultare un'operazione estremamente complessa; e ciò è
vero soprattutto se non si riesce ad individuare uno " statistic" 10 la cui
distribuzione sia determinata univocamente dai dati campionari. Per contro, si
deve tener presente del fatto che quando si è in presenza di un numero elevato
di possibili stati di natura e di possibili risultanze campionarie risulta molto
complicata, a volte anche impossibile, la definizione di tutte le possibili
funzioni di decisione.
10
Si ricorda che uno statistic, statistica in italiano, è una funzione nota degli elementi campionari e che le probabilità
a priori revisionate vengono dette probabilità a posteriori.
392
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
Nel paragrafo precedente è stato illustrato un esempio in merito alla decisone
di procedere o meno alla trivellazione di un pozzo per la ricerca del petrolio
esaminando la possibilità di acquisizione di informazioni campionarie
attraverso l’impiego di sismografi. Se si prende nuovamente in considerazione
l’esempio partendo dalla tabella dei rischi e si osservano i dati riportati nella
Tab. 7.11 si rileva immediatamente che se lo stato di natura più probabile è 1
le decisioni migliori risultano essere d 1 e d 4 , mentre se è più probabile lo stato di
natura 2 le decisioni migliori sono la d 2 e la d 6 . Si supponga ora che le probabilità
associate ai due stati di natura siano P1 0.2 e P 2 0.8 , sulla scorta di tali
probabilità si possono calcolare i rischi attesi riportati nella Tab. 7.12.
Funzioni di
decisione
Stati di natura
1 : assenza di petrolio 2 :presenza di petrolio
Dominanza
d1
0
600
-
d2
300
0
-
d3
144
348
Dominata
d4
48
306
-
d5
108
546
Dominata
d6
192
54
d7
252
294
Dominata
d8
156
252
-
Tab. 7.11 – Tavola delle perdite attese (rischi)
Per chiarezza espositiva risulta utile riproporre la tabella delle funz ioni di
decisione
Punti campionari
0,0
0,1 o 1,0
1,1
d1
d2
Funzioni di decisione
d3
d5
d6
d4
a1
a2
a1
a1
a2
a1
a2
a2
a1
a2
a1
a2
a1
a2
a1
a2
a1
a2
a2
a1
a1
a2
a2
a1
d7
d8
Poiché la decisione che minimizza il rischio atteso è d 2 , cioè quella di
procedere alla trivellazione qualunque sia l’esito della rilevazione campionaria, la
conclusione cui si perviene è che l’informazione campionaria acquisita, in questo caso
specifico, è del tutto irrilevante.
393
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
A prescindere dal risultato cui si è pervenuti ipotizzando l’acquisizione di
informazioni campionarie con dimensione del campione pari a 2 ( n=2), il
problema decisionale poteva essere affrontato e risolto in modo diverso secondo
i passi di seguito indicati:
1. fissazione delle probabilità a priori sugli stati di natura;
2. esecuzione della rilevazione campionaria e registrazione dei
risultati;
3. revisione, utilizzando la formula di bayes, delle probabilità a priori
sugli stati di natura sulla base delle risultanze campionarie;
4. applicazione del criterio bayesiano per l’individuazione dell’azione
cui corrisponde la perdita attesa minima.
Se si fa ricorso a questa procedura, la tabella dei rischi non è più necessaria
in quanto il criterio di decisione bayesiano può essere applicato direttamente
alla tabella delle perdite utilizzando le probabilità a priori riviste; utilizzando,
cioè, le probabilità a posteriori. Comunque, le due diverse procedure
pervengono alla stessa conclusione.
Funzioni di
decisione
Stati di natura
1 : assenza di petrolio 2 : presenza di petrolio
P 2 0.8
P1 0.2
Rischi
attesi
d1
0
600
480
d2
300
0
60
d4
48
306
254
d6
192
54
82
d8
156
252
233
Tab. 7.12 – Tavola dei rischi attesi per le decisioni non dominate
Se si assume che le probabilità a priori siano quelle sopra introdotte,
P1 0.2 e P 2 0.8 , osservando i dati riportati nella Tab. 7.12 si individua d 2
quale decisione ottimale che, come osservato, è una decisione indipendente dal risultato
campionario. Si ipotizzi ora una diversa distribuzione delle probabilità a priori, ad
esempio, P1 0.55 e P2 0.45 , e si calcolano i rischi attesi si individua d 6 quale
decisione ottimale (quella cui corrisponde il rischio atteso minimo). Si ricorda che la
decisione d 6 prevede di non procedere alla trivellazione se entrambi i sismografi
segnalano assenza di petrolio, di procedere alla trivellazione quando uno o entrambi i
sismografi segnalano presenza di petrolio.
Pertanto, se anziché procedere nel modo sopra indicato, cioè all’introduzione delle
funzioni di decisione e al computo dei rischi attesi, si procedesse alla scelta dell’azione
394
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
ottimale basando il calcolo sulla distribuzione delle probabilità a posteriori si perviene
alla stessa soluzione finale; infatti, ricordando la formula di Bayes
f x / f
f / x
f x / f
e i valori definiti nel capitolo precedente
P0,0 / 1 P0 / 1 P0 / 1 0.36
P0,0 / 2 P0 / 2 P0 / 2 0.09
P0,1 / 1 P0 / 1 P1 / 1 0.24
P0,1 / 2 P0 / 2 P1 / 2 0.21
P1,0 / 1 P1 / 1 P0 / 1 0.24
P1,0 / 2 P1 / 1 P0 / 2 0.21
P1,1 / 1 P1 / 1 P1 / 1 0.16
P1,1 / 2 P1 / 2 P1 / 2 0.49 .
cioè le probabilità che derivano dalla distribuzione binomiale
n x n x
p q
x
2!
2!
f 0 / 2
0.70 0.32 0.09
0.40 0.62 0.36
0!2!
0! 2!
2!
2!
f 1 / 1
0.41 0.61 0.48
f 1 / 2
0.71 0.31 0.42
1!1!
1! 1!
2!
2!
f 2 / 1
0.42 0.60 0.16
f 2 / 2
0.7 2 0.30 0.49
2!0!
2! 0!
si deducono facilmente le probabilità a posteriori.
Nel caso che si sta trattando n 2 mentre p 0.4 se 1 , p 0.7 se
f 0 / 1
2 ,quindi:
f 1 / 0
f 0 / 1 f 1
0.36 0.55
0.83
f 0 / 1 f 1 f 0 / 2 f 2 0.36 0.55 0.09 0.45
f 2 / 0 1 f 1 / 0 0.17
f 1 / 1
f 1/ 1 f 1
0.48 0.55
0.58
f 1/ 1 f 1 f 1/ 2 f 2 0.48 0.55 0.42 0.45
f 2 / 1 1 f 1 / 1 0.42
f 1 / 2
f 2 / 1 f 1
0.16 0.55
0.03
f 2 / 1 f 1 f 2 / 2 f 2 0.16 0.55 0.49 0.45
f 2 / 2 1 f 1 / 2 0.97 .
Le tavole di decisione nei tre casi considerati sono di seguito riportate.
395
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
Azioni
a1 : non perforare
a 2 : perforare
Stato di natura
1 : ass. di petrolio 2 : pres. di petrolio
P 2 / 0 0.17
P1 / 0 0.83
Perdita attesa
0
600
102
300
0
249
Tab. 7.13 - Tavola di decisione con probabilità a posteriori nel caso in cui i due sismografi
segnalano assenza di petrolio
Azioni
a1 : non perforare
a 2 : perforare
Stato di natura
1 : ass. di petrolio 2 : pres. di petrolio
P 2 / 1 0.42
P1 / 1 0.58
Perdita attesa
0
600
252
300
0
174
Tab. 7.14 - Tavola di decisione con probabilità a posteriori nel caso in cui un solo sismografo
segnala assenza di petrolio
Azioni
a1 : non perforare
a 2 : perforare
Stato di natura
1 : ass. di petrolio 2 : pres. di petrolio
P1 / 2 0.03
P 2 / 2 0.97
Perdita attesa
0
600
582
300
0
9
Tab. 7.15 - Tavola di decisione con probabilità a posteriori nel caso in cui i due sismografi
segnalano presenza di petrolio
Osservando quanto riportato nelle Tabb. 7.13, 7.14 e 7.15 si perviene alla
conclusione di non procedere alla trivellazione quando entrambi i sismografi
segnalano assenza di petrolio (cfr. Tab. 7.13), di procedere invece alla
trivellazione quando uno (cfr. Tab. 7.14) o entrambi (cfr. Tab. 7.15) i
sismografi segnalano presenza di petrolio, scelte queste che corrispondono
esattamente alla decisione d 6 , cioè la decisione che minimizza il rischio atteso.
***
Si dimostra l’equivalenza tra la minimizzazione del rischio atteso (forma normale) e il
criterio bayesiano basato sulle probabilità a posteriori (forma estensiva).
396
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
Per una qualunque funzione di decisione d i è possibile procedere al computo
del rischio (perdita attesa) Rdi , in corrispondenza di ogni stato di natura
Θ . Se si conosce la distribuzione di probabilità sugli stati di natura sarà,
inoltre, possibile procedere al calcolo del rischio atteso
E Rdi , Rdi , f nel caso in cui lo stato di natura è discreto
E Rdi , Rdi , f d nel caso in cui lo stato di natura è
continuo.
La scelta ottimale è la decisione
d * argmin R di , f
nel caso in cui lo stato di natura è
di
discreto
d * argmin
R d , f d
i
di
nel caso in cui lo stato di natura è
continuo.
Si ricorda che:
1. la funzione di decisione è definita sullo spazio dei campioni, è cioè
una funzione che fa corrispondere a ciascun punto camp ionario una
specifica azione, a d x1 , x2 ,...., xn d x ;
2. il rischio corrisponde alla perdita attesa,
R d , R d x , Ex l d x , ,
si avrà, pertanto,
argmin E R d i ,
d
i
argmin E R di x ,
di
.
argmin E E x l d i x ,
di
Considerando, senza perdere in generalità, il caso in cui sia lo spazio
parametrico che lo spazio dei campioni sono discreti, si ha:
argmin E R d i ,
d
i
argmin
di
argmin E E x l di x ,
di
l d x , f x /
x
i
f .
Se si cambia l’ordine di sommatoria, si tiene conto della relazione a d x e
dell’uguaglianza f x / f f / x f x si ha:
397
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
argmin x l di x , f x / f
argmin E R d i ,
d
i
argmin
di
x
di
l d x , f / x f x
x
i
argmin l d i x , f / x
di
f x
x argmin l a, f / x f x .
di
dove, nell’ultimo passaggio, si è tenuto
a d x1 , x2 ,...., xn d x .
pertanto
a argmin E R di ,
d
*
i
conto
della
argmin l a, f / x
d
relazione
.
i
*
dove con a si è voluto indicare l’azione ottimale quando nel problema decisionale si
utilizzano sia le informazioni a priori che le informazioni campionarie, si tratta cioè
della perdita attesa calcolata utilizzando le probabilità a posteriori. Al riguardo si
ricorda che la corrispondente azione ottimale individuata utilizzando le sole
informazioni a priori è data da
a* argmin
a
l a, f
.
***
Questo risultato dimostra la completa equivalenza delle due diverse procedure,
forma normale e forma estensiva, che consentono la minimizzazione della
perdita attesa. I diversi passaggi hanno riguardato il caso in cui sia lo spazio
parametrico che lo spazio dei campioni siano discreti; procedimento del tutto
analogo vale anche nel caso in cui entrambi gli spazi siano continui o uno sia
discreto e l’altro continuo.
Nel caso in cui entrambi gli spazi sono continui si ha:
argmin E R d i , argmin
d
d
i
argmin
di
i
x
l d x , f x / d x f
x
i
l d x , f / x d
i
argmin l d i x , f / x d
di
x
f x d x
a argmin
*
a
f x d x
argmin l d i x , f / x d f x d x
x
di
cioè:
l d x , f / x d argmin l a, f / x d
i
a
398
d
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
il che dimostra la completa equivalenza tra i due criteri. Cosa questa
d'altronde ovvia in quanto le due procedure sono basate sugli stessi dati e
calcoli, l'unica differenza risiede nell'ordine con cui le operazioni analitiche
vengono eseguite; infatti, entrambi si avvalgono delle pro babilità a priori e delle
informazioni campionarie nel computo dei valori attesi (rischi o utilità).
L'operatore sceglierà, vista la completa equivalenza dei due criteri, quello
che risulta più facilmente trattabile dal punto di vista algebrico ed operativo.
Se si riflette sulle operazioni che devono essere effettuate per pervenire alla
individuazione della decisione ottimale ci si rende immediatamente conto, però,
dell’onerosità della procedura (forma normale) basata sull’introduzione delle
funzioni di decisione; si è visto, infatti, nell’esempio che per un semplice
problema decisionale in cui sono soltanto 2 le possibili azioni e 3 i possibili
risultati campionari, il numero delle funzioni di decis ione possibili risulta pari a
8 2 3 ; anche se, al riguardo, si deve sottolineare che le funzioni di decisione
“ragionevoli”, cioè quelle da prendere in considerazione, sono soltanto 2: la d 4
e la d 6 . Concettualmente più semplice, è la procedura ( forma estensiva) basata
sulla minimizzazione dell’utilità attesa considerando le probabilità a posteriori;
ma, come già sottolineato, anche in questo caso si possono incontrare notevoli
difficoltà.
Il paragrafo successivo sarà dedicato alla trattazione dei casi di
aggiornamento delle probabilità a priori sulla scorta dell’evidenza campionaria,
cioè di derivazione delle probabilità a posteriori, che si incontrano più
frequentemente nella pratica. Mentre, a u lteriore chiarimento delle
considerazioni sopra svolte, si dedica la parte conclusiva di questo paragrafo
alla illustrazione di un altro caso decisionale.
Esempio 7.1
Si supponga che la proporzione di pezzi difettosi presenti in un lotto possa
assumere quattro diversi valori 1 0.02, 2 0.03, 3 0.04, 4 0.05 e che le
probabilità
(a
priori)
dei
diversi
stati
di
natura
siano
P1 0.10, P 2 0.20, P 3 0.40, P 4 0.30 , si supponga di aver estratto
un campione casuale bernoulliano (estrazione con ripetizione) di 100 pezzi dal
lotto e di aver riscontrato la presenza di 3 pezzi difettosi. Come si deve
procedere nella revisione dell’informazioni a priori tenendo conto delle
risultanze campionarie? Sostanzialmente quello che si vuol fare e passare da
P j f j a P j / x f j / x , per j = 1, 2, 3 e 4.
Se si indica con X il numero di pezzi difettosi riscontrabili nel lotto dei 100
pezzi esaminati, tale entità variabile potrà assumere i valori 0, 1, 2,…., x,….,
100 e la probabilità (verosimiglianza) di un qualunque risultato campionario
399
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
per uno specifico stato di natura è espressa dalla distribuzione binomiale
100 x
100 x
. Pertanto, la probabilità totale è data da
P X x /
1
x
X x 1 X x 2
P X x P
X x 3 X x 4
P X x / 1 P 1 P X x / 2 P 2
P X x / 3 P 3 P X x / 4 P 4
100
100
100 x
100 x
x
x
0,10
0, 20
0, 02 1 0, 02
0, 03 1 0, 03
x
x
100
100
100 x
100 x
x
x
0, 40
0,30
0, 04 1 0, 04
0, 05 1 0, 05
x
x
da cui
X 3 0, 02 X 3 0, 03
P X 3 P
X 3 0, 04 X 3 0, 05
P X 3 / 0, 02 P 0, 02 P X 3 / 0, 03 P 0.03
P X 3 / 0, 04 P 0, 04 P X 3 / 0, 05 P 0, 05
100
100
3
97
3
97
0, 02 0,97 0,10
0, 03 0,97 0, 20
3
3
100
100
3
97
3
97
0, 04 0,96 0, 40
0, 05 0,95 0,30
3
3
0,18 0,10 0, 23 0, 20 0, 20 0, 40 0,14 0,30 0,186
Il valore 0,186 è, quindi, la probabilità che l’entità variabile X assuma la
determinazione 3, cioè la probabilità di ottenere il risultato campionario ipotizzato
P X 3 f 3 .
Disponendo delle risultanze campionarie e delle probabilità a priori si può procedere
al computo delle probabilità a posteriori. Le elaborazioni sono riassunte nella Tab.
7.16.
400
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
Stato
di
natura
Probabilità
a
priori
Probabilità
condizionata
(verosimiglianza)
f 3 /
Probabilità
congiunta
f 3 /
Probabilità a posteriori
f / 3
f 3 /
4
f 3 /
i 1
0,02
0,03
0,04
0,05
0,10
0,20
0,40
0,30
1,00
0,18
0,23
0,20
0,14
0,018
0,046
0,080
0,042
0,186
i
i
0,097
0,248
0,430
0,225
1,000
Tab. 7.16 – Revisione delle probabilità a priori e computo delle probabilità a posteriori in
corrispondenza di un risultato campionario pari a 3 relativo ad un campione di dimensione
100
Come si può facilmente desumere analizzando i dati riportati nella Tab. 7.16, i
risultati campionari hanno prodotto delle variazioni nella distribuzione delle probabilità
sugli stati di natura; a questo punto il decisore può utilizzare tali valori per procedere al
calcolo delle perdite attese oppure procedere ad una ulteriore rilevazione campionaria, i
cui risultati consentono una seconda revisione delle probabilità, in questo processo di
revisione le probabilità a posteriori riportate nella tabella assumono la natura di
probabilità a priori nel secondo passo di aggiornamento della conoscenza. Si può
dimostrare senza eccessiva difficoltà che la procedura di aggiornamento delle
probabilità in due passi successivi produce gli stessi risultati della procedura che
congloba i risultati delle due rilevazioni in un solo campione che dovranno essere
utilizzati per revisionare le probabilità a priori iniziali.
I calcoli necessari per aggiornare le probabilità a priori sulla scorta dell’evidenza
campionaria nell’esempio sopra illustrato sono relativamente semplici, in altri casi la
soluzione non è cosi immediata. Fortunatamente, esistono situazioni, e sono abbastanza
frequenti, in cui il problema dell’aggiornamento delle probabilità a priori può essere
risolto in modo agevole, si tratta dei casi in cui è giustificato il ricorso alle distribuzioni
a priori coniugate già considerate nei capitoli 2 e 6 di queste note.
7.7 - Il valore dell’informazione
Si è detto nelle pagine precedenti come, in alcuni problemi di decisione,
l'operatore possa ritenere di non avere informazioni sufficient i sia in relazione
agli stat i di natura (ed è il caso speci ficamente trattato) che alle
conseguenze. Si è pure visto come in tali condizioni egli possa procrast inare
401
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
il momento della scelta decidendo per l'acquisizione di ulter ior i
informazioni, magari di tipo campionario.
Evidentemente la decisione di procedere all'acquisizione di ulteriori
elementi d'informazione deve essere presa a priori. Un tale fatto introduce nel
problema decisionale un elemento aggiuntivo d'incertezza relativo alle
risultanze campionarie e quindi alla bontà delle informazioni. L'operatore sa che
attraverso un'indagine potrà acquisire ulteriori informazioni che ridurranno
quasi certamente lo stato d'incertezza in cui è costretto ad operare, ma non
conosce esattamente la misura di tale riduzione. D'altra parte l'operatore sa
anche che l'effettuazione di un'indagine comporta delle spese, e che una
dilazione della decisione potrebbe risultare eccessiva ed implicare quindi
ulteriori cost i. Nel caso della scelt a degli investimenti pubblici, ad esempio,
può risultare impossibile o estremamente costosa una dilazione nell'inizio dei
lavori almeno per due ragioni, una legata a motivi di natura strettamente
polit ica, l'altra di carattere prevalentemente tecnico. Infatti, basta pensare,
all'urgenza di certe opere a carattere sociale, relativamente al primo caso, e al
fatto che dal momento in cui le informazioni vengono acquisite al momento in
cui una decisione d'investimento diviene operativa la situazione reale di
riferimento può essere notevolmente mutata, relativamente al secondo caso.
Riassumendo, in mer it o al problema dell'acquisizio ne di ulteriori
informazioni si devono distinguere almeno tre fatti:
1. che l'indagine comporta un costo e. che non è noto con certezza
fino a che punto tale costo sarà compensato dalle informazioni
aggiuntive;
2. che per l'effettuazione dell'indagine, in genere, si può disporre di
un arco di tempo limitato;
3. che la decisione d'acquisire ulteriori informazioni deve essere
presa a priori.
Da quanto scritto ai punt i 1 e 2 si capisce immediatamente come
un'indagine del genere debba avere quasi necessariamente carattere
campionario.
Va sottolineato il fatto che le informazioni aggiuntive possono essere
utilizzate, oltre che per modificare la distribuzione delle probabilità sugli stati di
natura, anche per modificare l'insieme delle conseguenze o la forma della
funzione di utilità.
Nelle pagine successive verrà descritto sommariamente il pro blema
dell'acquisizione di ulteriori informazioni attraverso indagini campionarie,
discutendo alcune procedure attraverso le quali può essere stabilito un piano
di campionamento ottimo in funzione di un problema decisionale, nei
termini espost i nel paragrafo precedente.
Poiché qui ci si limiterà, come già detto, a considerare il caso in cui i dati
campionari vengono utilizzati dall'operatore per mo dificare la distribuzione
402
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
della probabilità sugli stati di natura, quando si parlerà di piano di
campionamento ottimo, l'ottimalità andrà riferita a tale aspetto del problema
decisionale.
La bontà di un campionamento viene misurata attraverso il confronto tra
l'ut ilit à/perdita attesa calcolat a facendo uso dei dat i ag giuntivi, e
l'utilità/perdita attesa ottenibile senza campionamento. In altri termini, se
l'utilità attesa relativa all'azione migliore, calcolata utilizzando le informazioni
campionarie e detraendo il costo sopportato è superiore all'ut ilità attesa
relativa alla migliore azione senza l'uso dei dat i campionari, allora ci si
troverà in condizioni tali per le quali il costo del campionamento è più che
compensato dalla r iduzione dello stato d'incertezza in cui si è costrett i ad
operare; si procederà quindi all'effettuazione dell'indagine.
Un secondo problema relativo al campionamento (il primo è quello di
deciderne l'effettuazione) riguarda la dimensione campionaria.
Evidentemente, più si aumenta la dimensione del campione, maggiori
saranno le informazioni disponibili; d'altra parte ad una più elevata riduzione
dello stato d'incertezza cor risponderà un costo più elevato. Il piano di
campionamento ottimo sarà quello che massimizza l'utilità attesa alla luce di
questi due effetti contrastanti. In termini marginalist ici si può affermare che
la dimensione del campione va aument ata fino a quando il costo di un’unità
d'informazione addizionale bilancia l'incremento/decremento nell'utilità/perdita
attesa (costo marginale pari all'utilità marginale).
Prima di procedere alla trattazione puntuale del problema del
campionamento conviene introdurre ulteriori concetti che si riveleranno di
grande utilità nel corso dell’esposizione. Si tratta essenzialmente di due
concetti:
il valore atteso dell’informazione perfetta ( expexted value of
perfect information EVPI);
il valore atteso dell’informazione campionaria ( expexted value of
sample information EVSI).
Il valore atteso dell’informazione perfetta viene è dato dalla differenza tra l’utilità o
la perdita attesa che corrisponde all’azione ottima, cioè quella cui corrisponde la
massima utilità attesa o la minima perdita attesa e l’utilità o perdita attesa calcolata
ipotizzando la conoscenza perfetta dello stato di natura, Se il decisore sa che lo stato di
natura è 1 lo stesso non avrà alcuna difficoltà ad individuare l’utilità/perdita
corrispondente l’azione migliore, allo stesso modo può procedere in corrispondenza di
tutti gli altri stati di natura 2 , 3 , ... , j , ... , n . Se si indica con
l * j min l ai , j la perdita minima corrispondente a ciascun stato di natura, si
i
potrà procedere al computo della perdita attesa in situazione di incertezza ma sotto
l’ipotesi di perfetta informazione
403
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
a*p argmin
a
l
*
f
Ricordando che l’azione migliore in situazione di incertezza è data dalla relazione
l a, f
a argmin
a
il valore atteso dell’informazione perfetta è espresso da
EVPI = a*p a * argmin
a
l
*
f - argmin l a, f
a
Nel paragrafo precedente oltre ad aver dimostrato l’equivalenza tra forma normale e
forma estensiva, quando nei problemi decisionali si può disporre sia di informazioni a
priori che di informazioni campionarie, è stata individuata come azione ottimale quella
che risulta dalla relazione
a argmin
a
l a, f / x
,
a questo punto è possibile definire il valore atteso dell’informazione campionaria
(EVSI) che si ottiene, semplicemente, calcolando la differenza tra la perdita attesa
basata sulle probabilità a priori e la perdita attesa basata sulle probabilità a posteriori,
cioè
EVSI a a argmin
a
l a, f
argmin
a
l a, f / x
Come già sottolineato qualunque rilevazione campionaria comporta un costo che può
essere definito dalla relazione
C n C f n Cv
dove il costo totale del campionamento è costituito da una quota fissa più una quota
variabile il cui ammontare dipende dalla dimensione campionaria.
Pertanto il guadagno atteso netto associato alla rilevazione campionaria (expected net
gain from sampling ENGS) è dato da
ENGS EVSI C n EVSI C f Cv n EVSI C f n Cv
dove l’ultimo membro dell’ultima espressione è la traduzione della funzione di costo
nell’ipotesi di linearità del costo stesso.
Ovviamente, la dimensione campionaria ottima è quella cui corrisponde il massimo
valore ENGS 0 ; inoltre, C max EVPI .
Se si riportano in un grafico alcune delle quantità sopra definite si perviene ad una
figura del tipo di quella di seguito riportata (cfr. Fig. 7.3), dove, per l’ipotesi di linearità,
il costo marginale del campionamento è costante, mentre la perdita attesa marginale
dopo il campionamento è supposta decrescente.
Un ulteriore grafico (cfr. Fig. 7.4) consente la visione e l’incidenza di altri elementi
rilevanti nello svolgimento dei processi decisionali.
404
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
Perdita attesa senza campionamento a min
a
l a, f
Perdita totale attesa = a + C(n)
Perdita totale attesa minima
Costo del campionamento = C(n)
Dimensione campionaria ottima
Fig. 7.3 - Effetto del costo di campionamento e perdita attesa in corrispondenza della
dimensione campionaria ottima.
EVPI
EVSI
Costo del campionamento = C(n)
ENGS
Dimensione campionaria ottima
Dimensione campionaria
Fig. 7.4 - Valore atteso dell’informazione perfetta, valore atteso dell’informazione
campionaria e guadagno netto atteso
405
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
Ad illustrazione di quanto detto si riprenda in considerazione il problema decisionale
di procedere o meno alla perforazione. La tabella di perdita relativa a questo problema
già considerata in precedenza è quella sotto riportata dove è stata aggiunta la probabilità
a priori sugli stati di natura e la perdita attesa in corrispondenza delle due azioni.
Azioni
a1 : non perforare
a 2 : perforare
Stato di natura
1 : assenza di petrolio 2 : presenza di petrolio
P 2 0, 45
P 1 0,55
Perdita
attesa
0
600
270
300
0
165
Tab. 7.18 - Tavola di decisione: problema di trivellazione con perdite come conseguenze
Sulla scorta delle sole informazioni a priori il decisore sceglierà l’azione a 2 cui
corrisponde la perdita minore. Comunque il decisore, non completamente convinto dei
valori assegnati alle probabilità a priori potrebbe decidere di acquisire ulteriori
informazioni. In precedenza è stata esaminata la possibilità di acquisire informazioni
sullo stato di natura impiegando dei sismografi a costo zero. Ma come più volte
sottolineato qualunque rilevazione campionaria comporta un costo: nel caso specifico si
ipotizza una funzione di costo lineare senza costi fissi C n n 10 , cioè l’uso di un
sismografo costa 10 $, 2 sismografi (indipendenti) costano 20, ecc. ; ovviamente in
questo caso la dimensione campionaria non potrà superare le 16 unità, con 17 unità si
andrebbe incontro ad un costo superiore al vantaggio conseguibile.
Nella tavola che segue sono riportate le probabilità che ha un sismografo di segnalare
assenza o presenza di petrolio.
Segnalazione
del sismografo
Assenza di petrolio
Presenza di petrolio
Stato di natura
1 : assenza di petrolio
2 : presenza di petrolio
0.6
0.4
0.3
0.7
Tab. 7.19 – Probabilità dell’esito del sismografo condizionato allo stato di natura
Tenendo conto di tali probabilità il decisore che intende acquisire ulteriori
informazioni può perseguire due diverse vie, la prima, che è sicuramente la più
efficiente ma non di facile attuazione, consiste nel procedere all’acquisizione di una
informazione campionaria per decidere sulla scorta dell’evidenza acquisita se
proseguire nel campionamento o operare la scelta definitiva. La seconda via è quella
della effettuazione di un’analisi completa, detta analisi a preposteriori, che consente la
individuazione della dimensione campionaria ottimale.
406
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
I due possibili esiti dell’utilizzo di un sismografo sono x = 0 (assenza di petrolio)
oppure x = 1 (presenza di petrolio) con le relative probabilità:
P X 0 PX 0 / 1 P 1 PX 0 / 2 P 2 0,6 0,55 0,3 0,45 0,465
P X 1 PX 1 / 1 P 1 PX 1 / 2 P 2 0,4 0,55 0,7 0,45 0,535
Ricordando la formula di Bayes
f x / f
f / x
f x / f
P1 / X 0
P1 / X 1
PX 0 / 1 P 1
0,6 0,55
0,71
PX 0 / 1 P 1 PX 0 / 2 P 2 0,6 0,55 0,3 0,45
PX 1 / 1 P 1
0,4 0,55
0,41
PX 1 / 1 P 1 PX 1 / 2 P 2 0,4 0,55 0,7 0,45
P 2 / X 0 1 P1 / X 0 1 0,71 0,29
P 2 / X 1 1 P1 / X 1 1 0,41 0,59
Si può ora riproporre la tabella di decisione inserendo le probabilità a posteriori
Stato di natura
assenza
di 2 :presenza
1 :
Azioni
petrolio
P 1 / 0 0, 71
petrolio
P 2 / 0 0, 29
P 1 /1 0, 41
P 2 /1 0,59
P X 0 0, 465
P X 1 0,535
di
Perdita
attesa
a1 : non perforare
0
600
X =0
174
a1 : non perforare
0
600
X=1
354
a 2 : perforare
300
0
X =0
213
a 2 : perforare
300
0
X=1
123
Tab. 7.20 – Perdita attesa condizionata per un campione di dimensione 1
Come si desume dalla Tab. 7.20 se l’esito campionario è X = 0, l’azione
migliore è a1 non perforare (perdita attesa 174), se invece l’esito campionario è X =
1, l’azione migliore è a 2 perforare (perdita attesa 123). L’analisi a preposteriori
fornisce gli elementi per decidere se procedere all’acquisizione dell’informazione
(utilizzo di un sismografo del costo di 10$).
La perdita attesa non condizionata è data da
a min
a
l a, f / x 174 0,465 123 0,535 146,72 .
407
B. Chiandotto
Versione 2016
INFERENZA STATISTICA
Cap. 7 – Teoria statistica delle decisioni
Confrontando questa perdita con quella calcolata in corrispondenza della
migliore azione in assenza di informazioni campionarie si ha
EVSI a a 165 146,72 18,18
Se il decisore ritiene di dover proseguire nell’analisi a preposteriori e quindi
procedere all’utilizzo di due sismografi si otterrebbero i seguenti r isultati. Si
precisa che si limiterà a riportare soltanto i valori relativi alle azioni ottimali
in corrispondenza dei diversi risultati campionari.
Le probabilità a posteriori sono date da
P1 / X 0 0,83; P1 / X 1 0,58; P1 / X 2 0,29
P 2 / X 0 0,17; P 2 / X 1 0,42; P1 / X 2 0,71
e le perdite attese condizionate corrispondenti alle azioni ottimali sono
a 0 102
a 1 174
a 2 87
Tenendo presente che P X 0 0,2385 , P X 1 0,4530 ,
P X 2 0,308 , la perdita attesa non condizionata è pari a $ 129,99.
EVSI a a 165 129,99 35,01
ENGS = EVSI-C(2) = 35,01 – 20 =15,01.
La conclusione è che risulta conveniente procedere nell’utilizzo di due
sismografi. Ad analoga conclusione si perviene se si prevede l’utilizzo di tre
sismografi; infatti la perdita attesa ott imale non condizionata dell’esito
campionario è pari a $ 116,40, quindi
EVSI a a 165 116,40 55,54
ENGS = EVSI-C(3) = 55,54 – 40 =18,60.
Se si procede all’analisi ipotizzando l’utilizzo di 4 sismografi si perviene ad
una conclusione diversa; infatti, la perdita attesa ottimala non condizionata
dell’esito campionario è pari a $ 109,46, quindi
EVSI a a 165 109,46 55,54
ENGS = EVSI-C(3) = 55,54 – 40 =15,54.
Come si può rilevare il guadagno che si consegue in corrispondenza di un
campione di dimensione n = 4 è inferire a quello accertato per n= 3 (15,54
contro 18,60), si accerta cioè una riduzione del vantaggio marginale dato dal
campionamento, il che porta a fissare la dimensione ottima in n = 3.
408