Unità Spinale Unipolare
un viaggio tra le esperienze
acquisite e lo scenario futuro
Tecnologie
per la rieducazione della mano
D. Gaburri - USU Perugia
Ancona
18-19 Novembre 2011
1
Sessione:
Viaggio tra le nuove
tecnologie di intervento
2
Attualmente:
Miglioramento della cura nella lesione
midollare
Non reversibilità del danno neurologico
Outcome neurologico ancora determinato da
livello ed estensione della lesione
Le scienze di base non hanno ancora dato
contributi significativi per la “guarigione “
Kakulas BA Neuropatology: the foundation for new treatments in spinal cord injury
Spinal Cord (2004) 42, 549- 563)
3
Mano e arto superiore
La funzionalità dell’arto superiore e
della mano ha un grosso impatto nel
livello di indipendenza nelle ADL,
come la cura di sé, e anche nei
compiti correlati al lavoro e alle
attività sociali
4
Un miglioramento di tale aspetto può
determinare nelle persone con SCI:
un aumento dell’indipendenza
un coinvolgimento nelle attività sociali
un decremento nel carico assistenziale
un impatto positivo sulla percezione di QOL
5
GJ Snoeck, MJ IJzerman
Survey of the needs of patients
with spinal cord injury: impact
and priority for improvement in
hand function in tetraplegics
Spinal Cord (2004) 42, 526-532
6
Obiettivo:Studiare l’impatto del deficit dell’arto
superiore nelle persone con tetraplegia
Setting:Regno Unito, Olanda
Disegno di studio: indagine tra i membri delle
associazioni SCI del Regno Unito e Olandesi
Pazienti: 565 tetraplegici (selezionati da 1475
pazienti SCI)
Misure di outcome: miglioramento atteso
nella QOL in relazione al miglioramento
nell’impairment nella funzionalità della mano e
altre 7 aree (scheda CREST)
Risultati: 77% legavano un importante
miglioramento della QOL al miglioramento
dell’uso della mano
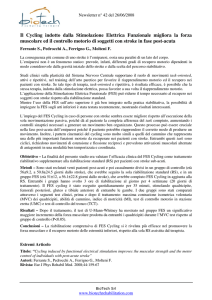
7
% di pazienti tetraplegici e paraplegici che si aspettavano un vantaggio nella QOL,
8
in relazione al miglioramento dell’impairment sull’asse x
Attuali approcci della ricerca
Trapianto neurale (cellule staminali, cellule
fetali,cellule olfattive, ponti neurali periferici,
cellule Schwann)
Modificazioni dell’”ambiente” SNC
(anticorpi per vari fattori inibitori endogeni,
stimolazione di fattori neuro-trofici, interventi
farmacologici)
Stimolazione elettrica (FES a scopo
terapeutico o funzionale, Rigenerazione
assonale)
S. Hamid, R.Hayek Role of electrical stimulation for rehabilitation and regeneration
after spinal cord injury: an overview Eur Spine J (2008) 17:1256–1269
9
FES
Applicazione di livelli sicuri di corrente
elettrica
per
attivare
il
sistema
neuromuscolare danneggiato o disattivato in
modo coordinato
al fine di ottenere la
funzione persa
Neuroprotesi
Apparecchiature
che
utilizzano
la
stimolazione elettrica per attivare il sistema
nervoso
10
FES:obiettivo
Riguadagnare il recupero funzionale a
prescindere dalle connessioni anatomiche del
midollo spinale
Utilizzo della stimolazione elettrica attraverso
neuroprotesi per ripristinare “parzialmente”
la funzione persa
11
Applicazioni nella SCI
2 applicazioni
Terapeutiche
Condizionamento
cardiovascolare
Prevenzione dell’atrofia
muscolare attraverso
l’esercizio
Prevenire e trattare LdP
Osteoporosi
Contratture articolari
Controllo della spasticità
Funzionali
Deambulazione e/o supporto
locomotorio
Assistenza alla respirazione
Presa e manipolazione
Elettro-eiaculazione
Svuotamento intestinale e
vescicale
Hamid S Role of electrical stimulation for rehabilitation and regeneration after
spinal cord injury Eur Spine J (2008) 17: 1256-269
12
FES: principi anatomici e
fisiologici
Sia nervi che muscoli rispondono alla corrente
elettrica.
Utilizzando le attuali tecniche, è neccessaia
una carica 100 volte maggiore per stimolare un
muscolo rispetto a la carica necessaria per
stimolare il nervo.
L’obiettivo pratico delle FES è stimolare
direttamente il nervo
13
FES: principi anatomici
e fisiologici
La preservazione
per intero del II°
motoneurone
(includendo la
giunzione
neuromuscolare) è
essenziale per tutte
le forme di FES.
14
FES: principi anatomici
e fisiologici
Se la sensibilità è conservata, lo stimolo può
provocare dolore.
La frequenza dell’impulso deve essere
abbastanza alta da generare una contrazione
muscolare regolare.
Lo stimolo può essere monofasico o bifasico,
ma di norma sono utilizzati stimoli bifasici
bilanciati:perché forniscono un miglior controllo
sulla forza della contrazione muscolare e meno
incline a causare danni tissutali.
15
FES: principi anatomici
e fisiologici
È noto che l’inattività porta alla trasformazione delle
fibre muscolari dal tipo I ( rosse, slow, aerobiche)
al tipo II (bianche, fast, anaerobiche) , ma questo
cambiamento è reversibile attraverso un esercizio
appropriato.
Un regime di esercizi di stimolazione elettrica
può aumentare il tempo di contrazione e la
resistenza alla fatica, probabilmente quando più
fibre muscolari diventano di tipo I.
KT Ragnarsson Functional electrical stimulation after spinal cord injury: current use,
16
therapeutic effects and future directions Spinal Cord (2008) 46, 255-274
FES: principi anatomici
e fisiologici
Dei segnali di feedback sensoriali piuttosto primitivi
possono essere ottenuti da goniometri
e
potenziometri
posizionati
esternamente
in
corrispondenza di varie articolazioni.
Questi possono misurare le posizioni articolari ed il
movimento, permettendo al microprocessore di
calcolare la velocità e l’accelerazione del movimento
e conseguentemente aggiustare e controllare lo
stimolatore.
17
Sistemi FES componenti
La maggior parte di sistemi FES sono abbastanza
simili nel disegno e nello scopo, ma la
stimolazione elettrica può essere rilasciata sia
attraverso elettrodi
e cavi di superficie
(transcutanei), percutanei o impiantati.
Le principali componenti dei sistemi FES includono:
una
sorgente d’energia portatile (batteria
ricaricabile)
una unità di comando a microprocessore
uno stimolatore
fili conduttori
elettrodi
sensori
18
Utilizzatore
(consapevolezza e volontà)
Comando di attivazione
volontaria
Interfaccia
utilizzatore
Feedback
Processore di comando
e controllo
Fonte
d’energia
Parametri dello
stimolo
Stimolatore
Elettrodi, cavi
Elettrodi
Stimolo
Sensori di forza
Contrazione
muscolare
Movimento
Sensori di posizione
Posizione
articolare
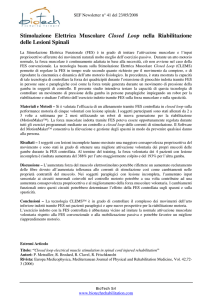
Principali componenti
sistema FES e
sequenza d’azione
19
Downey, Darling 2001
L’utilizzatore e l’unità di controllo interagiscono.
L’unità di controllo ha 3 funzioni principali :
1.
2.
3.
Fornire energia a tutto il sistema attraverso le
batterie
Estrarre informazioni dall’utilizzatore e dai
sensori
Trasformare le informazioni ricevute in
comandi che sono trasmessi allo stimolatore
impiantato in segnali in radiofrequenza
attraverso una bobina trasmittente localizzata
esternamente.
20
L’utilizzatore è in grado di controllare l’intero
sistema attraverso una varietà di risorse come
un joystick o interruttori che possono usare la
forza del respiro, segnali mioelettrici,
riconoscimento vocale o sensori di movimento.
A seconda di come il feedback ed il controllo
automatico siano forniti dal sistema, il controllo
può essere classificato open loop o closed
loop.
21
Sistemi FES di superficie
elettrodi posizionati sulla cute sopra i nervi desiderati
o sopra i loro punti motori; connessi attraverso i fili
conduttori allo stimolatore, portato dall’utilizzatore
sicuri e poco costosi,
difficile posizionamento preciso degli elettrodi occupa
molto tempo.
difficile generare contrazioni isolate di muscoli specifici
I muscoli profondi spesso non riescono ad essere
attivati.
può essere dolorosa
sistema, visibile esternamente, può essere
esteticamente inaccettabile.
indicati per l’ utilizzo in tempi brevi.
22
Elettrodi intramuscolari con
conduttori percutanei
usati principalmente durante lo sviluppo di sistemi
impiantabili
possono essere inseriti attraverso la cute con un ago
ipodermico di grosso diametro e posizionati sul punto
motorio del muscolo selezionato.
quando l'ago viene ritirato l'elettrodo rimane con il
cavo in uscita attraverso la pelle e la connessione con
uno stimolatore esterno.
In generale i cavi percutanei sembrano sicuri, ma
massima cautela nell’uso prolungato, per prevenire
l'infezione e la formazione di granuloma.
23
Sistemi FES impiantati
Elettrodi, cavi e stimolatore sono impiantati, ma
l’unità di controllo e la batteria ricaricabile sono
esterni.
ideali per l’uso a lungo termine
lo stimolatore riceve i comandi e l’energia attraverso
un link telemetrico a radiofrequenza (antenna),
dall’unità di controllo e dalla batteria, ma queste
sono di solito esterne. Sfortunatamente, la richiesta
di energia di un sistema FES multicanale è troppo
grande per permettere l’impianto di batterie interne
con la tecnologia disponibile attualmente.
24
Sistemi FES impiantati
Gli
elettrodi
impiantati
sono
posizionati
chirurgicamente adiacenti al nervo (epineurali), attorno
al nervo attraverso un’elica f, o al punto motorio sulla
superficie muscolare (epimisiali) o dentro al muscolo
(intramuscolari).gli elettrodi forniscono una buona
specificità muscolare e permettono la stimolazione di
muscoli specifici e un reclutamento eccellente con
correnti relativamente basse.
Attenzione nella procedura chirurgica e durante la
stimolazione a lungo termine a frequenze
relativamente alte per non danneggiare il nervo.
Per l’attivazione di muscoli profondi e molto piccoli,
sono preferibili gli elettrodi intramuscolari.
25
Criteri di applicazione
La forza della contrazione muscolare indotta
dalla FES deve essere energica, controllabile
ripetibile
Lo stimolo elettrico non deve essere doloroso
Il II° motoneurone deve essere intatto e le
strutture nervose non devono essere
danneggiate dalle FES
Il metodo di rilascio delle FES deve essere
accettabile per l’utilizzatore
Peckam PH, Gorman PH Functional electrical stumulation in the 21st century
Topics Spinal Cord Inj Rehabil 2004; 10: 126-150
26
Sistemi FES
per gli arti superiori
L’applicazione delle FES a livello degli arti superiori è
spesso limitata dal danno del secondo motoneurone
all’interno del segmento midollare interessato dalla
lesione, tuttavia molte persone con tetraplegia C5 e
C6, presentano una conservazione dei II° motoneuroni
a livello di C7 e C8 e quindi possono beneficiare di
sistemi FES sia di superficie che impiantati
In sviluppo sistemi FES a 12 canali per livello
neurologico C4 o più alto, che hanno preservato il II°
motoneurone C5 e C6. Tali sistemi sono disegnati per
fornire una stabilità della spalla e per controllare la
flessione e l’estensione del gomito, per poter orientare
nello spazio la mano e l’intero arto superiore, oltre a
fornire grasp, tenuta e rilascio della presa.
27
Bryden AM An implanted neuroprosthesis for high tetraplegia Top Spinal Cord
Rehabil 2005 10
I candidati per tali sistemi devono
avere:
II° motoneurone intatto
minima spasticità dei muscoli che devono
essere attivati
assenza di contratture articolari significative
alto grado di motivazione
forte supporto familiare
28
I sistemi disponibili utilizzano elettrodi di
superficie, percutanei ed impiantati
Sono in grado di fornire la prensione palmare
per afferrare, tenere e rilasciare oggetti
relativamente grandi e pesanti come un
bastone e una bottiglia e una prensione
laterale per oggetti più piccoli e sottili come
una chiave un foglio e un floppy disk.
29
Sistemi FES di superficie
(in fase precoce e durante il trattamento)
Bionic Glove
Mai disponibile in commercio, ma è
stato utilizzato da pazienti con
tetraplegia C6
Sfruttava est del polso per afferrare e
flessione per rilasciare
Benefici clinici insufficienti per la
difficoltà nell’indossare e togliere
l’apparecchio e per la difficoltà di
raggiungere
una
stimolazione
muscolare selettiva e un sufficiente
controllo del polso.
30
NESS H200 ( in origine Handmaster)
Unico
sistema
disponibile
in
commercio
Ortesi polso-mano regolabile con
cinque elettrodi di superficie inseriti
per i flessori e gli estensori delle dita
e del pollice che è in grado di
generare su stimolazione una presa
palmare e laterale e successivo
rilascio.
Unità di controllo esterna portatile con
patterns
di
stimolazione
preprogrammati di apertura e chiusura
che l’utilizzatore può attivare con un
pulsante.
Non invasiva e relativamente facile
da applicare, utile in persone con
tetraplegia C5 o C6
31
Sistemi FES percutanei
Gli elettrodi percutanei sono stati usati per sistemi
che ora sono completamente impiantabili.
Un sistema FES per l’arto superiore con elettrodi
percutanei, il FESMate è stato sviluppato ed è
entrato in commercio in Giappone. Consiste in un
unità di controllo/stimolatore portatile a 30 canali
connesso a elettrodi percutanei intramuscolari che
sono attivati da un interruttore. L’ultima versione
NEC FESMate ha uno stimolatore ed elettrodi
completamente impiantabili
Assicurano una presa palmare e laterale efficace e
sono riportate poche infezioni causate dagli elettrodi
percutanei.
32
Sistemi impiantati
FreeHand
(disponibile in commercio dal 2001)
8 elettrodi, impiantati
(epimisio)
1 stimolatore impiantato
Spalla controlaterale
protrazione/retrazione
elevazione/depressione
apertura e chiusura mano
(presa palmare e laterale)
33
FreeHand
impiantato in più di 250 individui con tetraplegia C5
e C6, 51 dei quali parteciparono ad uno studio
multicentrico dove fu misurata la funzionalità prima e
dopo l’impianto e la riabilitazione e con e senza
Freehand
Tutti i partecipanti mostrarono avere una forza di
presa maggiore, miglior afferra mento e
rilascio,maggior indipendenza nelle ADL ed
espressero una grande soddisfazione.
Impianto sicuro poche complicanze.
PeckamPH, 2001
Taylor P, 2002
Peckam PH 2002
34
FreeHand
Più recentemente
sono state utilizzate delle
tecniche chirurgiche mininvasive
Utilizzato anche in combinazione alla chirurgia
ricostruttiva della mano anche, specialmente
quando la stimolazione elettrica dei muscoli
convenzionali non può generare una presa e rilascio
sufficienti e nessun muscolo adiacente può essere
trasferito
35
FreeHand (seconda generazione)
Minimizzare l’uso di componenti esterne
Controllo naturale e integrato con le precedenti
strategie di movimento dell’utilizzatore (controllo
spalla ipsilaterale)
Includere patterns di presa ulteriori
Espandere lo spazio di lavoro disponibile del braccio
attraverso stabilizzazione di spalla, estensione del
gomito e pronazione dell’avambraccio
Utilizzo di segnali EMG provenienti dalla
muscolatura residua
Kilgore K L An Implanted Upper Extremity Neuroprosthesis Using Miolectric
Control J Hand Surg Am 2008 April; 33(4)
36
Futuri sviluppi
Gli aspetti promettenti dei sistemi impiantati, che
si stanno testando attualmente, affrontano molti
difetti dei sistemi precedenti, cioè:
controllo muscolare omolaterale,
più componenti impiantati (invece che esterni),
un maggior numero di muscoli da stimolare,
fornire l’estensione del gomito
capacità di programmare in modo semplificato
permettere l’impianto in entrambi gli arti superiori
le batterie e l’unità di controllo sono ancora esterne
al corpo, ma potranno essere impiantabili a breve
scadenza usando un collegamento a radiofrequenza
per alimentare e controllare il sistema.
37
Futuri sviluppi
Tecniche chirurgiche mininvasive, già
sperimentate,
possono permettere un
impianto precoce con un trauma minore e un
recupero precoce delle funzionalità della
mano.
Inoltre la miniaturizzazione dei componenti
del sistema e l’impianto totale dell’intero
sistema
aumenteranno
indubbiamente
l’accettabilità degli utilizzatori.
38
Wheeler CA, Peckham H MS
Wireless wearable
controller for upper-limb
neuroprosthesis
JRRD Volume 46, Number 2, 2009
39
Micropulse II (NDI Medical, Cleveland , OH, USA)
alimentato internamente e controllato da un sistema
wireless permettendo così l’eliminazione del cavo
esterno e dell’unità di controllo.
40
Muller-Putz GR et al
Temporal coding of brain
patterns for direct limb control
Frontiers in Neuroscience June 2010
41
Obiettivo:
Arginare il problema delle neuroprotesi tradizionali:
ridotta abilità nel controllare volontariamente
l’apparecchiatura
Procedura: (8 soggetti sani)
Interfaccia cervello-computer(BCI) fornisce un
input traducendo pattern di attività cerebrali in
comandi di controllo su un braccio robotico
artificiale, su due gradi di libertà indipendenti: grasp
e flessione del gomito; attraverso un numero
minimo di elettrodi sullo scalpo.
42
Harvey L A et al
Early intensive hand
rehabilitation after spinal cord
injury (“Hands on”): a protocol
for randomized controlled trial
Trials 2011, 12: 14
43
78 partecipanti recente tetraplegia(da C2 a T1)
completa ed incompleta
Riabilitazione in 7 US in Austr/ N Zel
randomizzati in 2 gruppi
G di controllo
G sperimentale
Trattamento convenzionale
Trattamento convenzionale
+
8 settimane di trattamento
intensivo mano “ target”
(stazione di lavoro: ReJoice,
FES)
+
12 settimane di trattamento convenzionale
44
ReJoice workstation
auricolare Bluetooth, attivato dallo “schiocco” dei
denti, invia segnali radio a stimolatore muscolare
che permette apertura, chiusura della mano e
varie attività di presa e manipolazione, attraverso
dei giochi elettronici visualizzabili dal monitor PC
45
Misure di outcome:
Primario: (funzionalità unilaterale della mano)
ARAT Action Research Arm Test modificato a 8
settimane
Secondari: ( impairment, limitazioni dell’attività,
restrizioni nella partecipazione)
ARAT Action Research Arm Test modificato a 6
mesi e a 12 mesi
Summed Upped Limb Strenght a 8 settimane, 6 e
12 mesi
AIS Sensory Assessment a 8 settimane, 6 e 12
mesi
AsTex sensory test a 8 settimane, 6 e 12 mesi
AuSpinal Assessment a 8 settimane, 6 e 12 mesi
46
Misure di outcome:
Secondari:
The Goal Attainment Scale (GAS) a 8 settimane
The Capability of Upper Extremity a 8 settimane,
6 e 12 mesi
Assessment of Quality of Life (AQoL) a 8
settimane, 6 e 12 mesi
Health Utilities Index Mark 3 (HUI3) a 8
settimane, 6 e 12 mesi
The self-care subscale of SCIM III a 8 settimane, 6
e 12 mesi
Partecipant Perception of treatment
Effectiveness a 8 settimane
Economic outcomes
47
Rigore metodologico
del protocollo
Lo studio aderirà a dei principi chiave
importanti per minimizzare i bias e questi
saranno riportati in accordo con le linee guida
CONSORT
Si concluderà nel 2012
48
Robotica
(applicazione su stroke molto più studiata
rispetto a SCI)
Aumentare l’intensità
dell’attività riabilitativa nel
paziente o aumentare il
numero dei pazienti trattati,
assistendo il lavoro del
terapista
Aumentare partecipazione,
motivazione del paziente con
interfacce di realtà virtuale
Miglioramento outcome funzionale?
49
Dispositivi robotici per la mano e
arto superiore (stroke e SCI)
MIT-Manus
MIME
ARM guide
Bi-Manu-Trac
GENTLE/s
T-WREX
Armeo Spring
ARMin
RiceWrist
50
Zarifa J et al
Feasibility and efficacy of
upper limb robotic
rehabilitation in a subacute
cervical spinal cord injury
population
Spinal Cord 13 september 2011
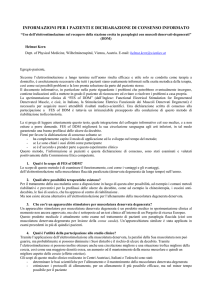
51
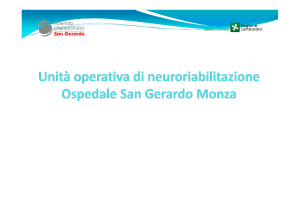
Studio multicentrico
Obiettivo: studiare l’utilizzo di un dispositivo per la
riabilitazione robotica dell’arto superiore Armeo
Spring Hocoma AG in SCI sub-acuta
Setting: 2 centri di riabilitazione Canada
Campione: 12 soggetti (C4-C6)ASIA IC A-D
sottoposti ad un training 16 sessioni su 5,2
settimane.
Outcome 1: fattibilità di inserire l’apparecchiatura
nel trattamento del paziente
Outcome 2:efficacia nel migliorare i risultati
funzionali GRASSP, ARAT, dinamometria della
presa range di movimento
Risultati : fattibilità si
52
Armeo Spring Hocoma AG
53
Kadivar, Z
Robotic training and kinematic
analysis of arm and hand after
incomplete spinal cord injury:
A case study
Rehabilitation Robotics (ICORR), 2011 IEEE International Conference
54
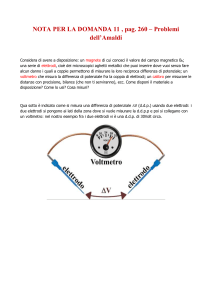
RiceWrist
1 soggetto tetraplegia incompleta ASIA IS D
Studio per valutare la fattibilità del training e la sicurezza
dell’apparecchio.
Miglioramento sulla scioltezza del movimento e anche sul
55
controllo motorio del braccio e della mano
Conclusioni
“I progressi nella reinnervazione ed altri interventi
biologici porteranno una variazione significativa nelle
prescrizioni di ortesi e neuroprotesi.
Per trarre vantaggio dagli avanzamenti della
tecnologia, è necessaria una ricerca ulteriore nel
mantenere integro il II° motoneurone durante e
immediatamente dopo il trauma.
Dovrà essere stabilita anche l’interazione tra la
performance della protesi e il tempo trascorso dalla la
lesione.”
Knutson J, 2006
56
Aspetti psicologici
Non studiati se non nei termini di soddisfazione del
risultato funzionale
Domande aperte:
Percezione globale di sè
Visibilità esterna
Cosmesi
“Invasività”
Rifiuto (parte estranea al proprio corpo)
57
Aspetti economici
Mercato relativamente “piccolo”
Costi per la ricerca
Crisi economica
Sanità Pubblica in crisi
58
GRAZIE
59