Progetto di semestre
EL - 06/07 - SI - 01
TIsat-1
Power Management
Studenti: Andrea Crivelli
Roberto Pedretti
Docente: Paolo Ceppi
Relatore: Paolo Ceppi
Correlatore: Allen Weston
15 febbraio 2007
1
Indice
1 INTRODUZIONE
9
2 REQUISITI E SPECIFICHE
11
3 STUDIO DELLE SOLUZIONI
13
3.1
3.2
3.3
3.4
3.5
3.6
Tecnologia fotovoltaica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1.1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1.2
Funzionamento celle solari . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1.3
Funzionamento Modulo solare . . . . . . . . . . . . . . . . . . . . . . . . 15
Studio MPP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2.1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2.2
Metodo Tensione costante . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2.3
Metodo Tensione costante con sensore di temperatura . . . . . . . . . . 18
3.2.4
Metodo Hill Climbing . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Convertitori DC/DC switching . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.3.1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.3.2
Topologia Step-up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.3.3
Topologia Step-down . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.3.4
Topologia Step-up-down . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Studio irraggiamento solare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.4.1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.4.2
Simulazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Celle solari CESI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.5.1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.5.2
Parti meccaniche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.5.3
Disposizione celle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.5.4
Peso pannello . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.5.5
Simulazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Celle solari Solterra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.6.1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.6.2
Parti meccaniche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.6.3
disposizione celle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.6.4
Peso Modulo solare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.6.5
Simulazione elettrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
2
3.7
Confronto tecnologie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.8
Batterie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.9
3.8.1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.8.2
Tipi di accumulatori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.8.3
Carica accumulatori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.8.4
Batterie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.8.5
Confronto Batterie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Adabilità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.9.1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.9.2
Reliability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.9.3
Failure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.9.4
Failure Rate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3.9.5
MTBF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
3.9.6
Ridondanza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.9.7
Aspetto sistemistico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.9.8
Esempio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
3.10 Sistema completo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
3.10.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
3.10.2 Moduli solari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3.10.3 Batterie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
3.10.4 Controllo batterie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.10.5 Microprocessore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.10.6 Convertitore di tensione . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3.10.7 Peso del sistema completo . . . . . . . . . . . . . . . . . . . . . . . . . . 77
4 CONCLUSIONI
78
3
Elenco delle gure
1
Cella fotovoltaica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2
Curva caratteristica
3
Circuito equivalente di una cella solare . . . . . . . . . . . . . . . . . . . . . . . 15
4
Potenza(U) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5
TC-con interruttore
6
TC-con sensore di temperatura . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
7
Metodo Hill climbing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
8
Confronto convertitori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
9
Schema di principio del convertitore step-up . . . . . . . . . . . . . . . . . . . . 22
10
Funzionamento del convertitore step-up . . . . . . . . . . . . . . . . . . . . . . 23
11
Schema di principio del convertitore step-down . . . . . . . . . . . . . . . . . . 24
12
Funzionamento del convertitore step-down . . . . . . . . . . . . . . . . . . . . . 25
13
Schema del convertitore step-up-down . . . . . . . . . . . . . . . . . . . . . . . 26
14
Funzionamento in modo continuo . . . . . . . . . . . . . . . . . . . . . . . . . . 27
15
Funzionamento in modo discontinuo . . . . . . . . . . . . . . . . . . . . . . . . 29
16
Situazione analizzata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
17
Circuito utilizzato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
18
Ambiente di sviluppo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
19
Corrente X+X- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
20
Corrente Y+Y- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
21
Corrente Z+Z- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
22
Corrente intero sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
23
Sistema solare 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
24
Sistema solare 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
25
Speciche Cubesat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
26
Celle 20x40 mm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
27
Celle 40x80 mm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
28
Circuito di carica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
29
Pannello 20x40 mm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
30
Graco pannello 20x40 mm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
31
Pannello 40x80 mm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
32
Graco pannello 40x80 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
33
Celle 20x20 mm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4
34
Pannello 20x20 mm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
35
Graco pannello 20x20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
36
Confronto moduli solari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
37
Curve di carica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
38
Confronto delle varie tipologie di batterie . . . . . . . . . . . . . . . . . . . . . 58
39
Esempio di bathtub curve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
40
Failure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
41
Curve di carica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
42
Graco possibilità di carico e dearting curve in funzione della temperatura . . . 63
43
Failure rate 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
44
Esempio tubazioni idrauliche . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
45
Esempio di un sistema a blocchi . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
46
Diagramma dei blocchi base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
47
Esempio blocco . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
48
Circuito N◦ 1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
49
Circuito N◦ 2
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
50
Batteria Saft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
51
Simbolo controllo batteria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
52
Circuito di protezione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
53
Fuel Gauge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
54
Step-up Maxim . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
5
RIASSUNTO / ABSTRACT
Questo progetto ha avuto come obbiettivo quello di realizzare il sistema di alimentazione
per il satellite TIsat-1. Dal momento che l'unica fonte di energia rinnovabile nello spazio è
quella fornita dal sole, il nostro sistema è stato basato su tecnologia fotovoltaica. Dato che
operiamo in condizioni climatiche estreme, nello studio del circuito abbiamo tenuto conto di
molti fattori. Abbiamo cercato di sviluppare una soluzione ottimale sia dal punto di vista
performante, che da quello dell'adabilità.
The objective of this project is to make an power managment system for satelitte TIsat-1. The
only energy available is generated from the sun, therefore our system is based on photovoltaic
technology. In the study of the system we have controlled many factors, because we operate
in extreme climatic conditions. We have tried to develop one highly ecient and reliable
solution.
6
PROGETTO ASSEGNATO
Descrizione
Si vuole sviluppare e realizzare un satellite della classe CubeSat denominato TIsat-1: questa
descrizione è comune per il lavoro di quattro gruppi di studenti, due gruppi E e due gruppi I. I
compiti specici di ciascun gruppo sono tali da poter essere valutati distintamente. Imparare
a collaborare e a comunicare fa parte integrante del lavoro. Il progetto si inserisce nell'ambito
dell'iniziativa SUPSI-SpaceLab del DTI. I collaboratori SSL contribuiscono all'integrazione
di sistema e mettono a disposizione le informazioni acquisite n qui. Si presenteranno anche
necessità di contatti e collaborazioni con enti esterni al DTI.
Obbiettivi da raggiungere
TIsat-1 in versione da laboratorio con collaudi eseguiti.
Gruppi che collaborano (collaborazioni interne e esterne).
Compiti da eseguire:
- Analizzare la tematica student class satellites in tutti i suoi aspetti e l'ambito spaziale
per l'applicazione delle tecnologie. Lettura, discussioni, presentazioni.
- Sviluppo e realizzazione della parte di alimentazione - E
- Sviluppo e realizzazione della parte di comunicazione - E
- Altrettanto per sensorica e rmware - I
- Sviluppo e realizzazione dei programmi per PC per decodicare i messaggi di
TIsat-1 e noticarne ricezione a SpaceLab via Web. Verranno messi a
disposizione di chi cercherà di captare i segnali di TIsat-1 in tutto il mondo - I.
È chiesto un lavoro coordinato (team), con il coinvolgimento delle risorse disponibili
presso il DTI anche oltre i diretti responsabili del progetto assegnato.
Tecnologie da utilizzare
Progetto di sistema completo: tecnologie Hardware e Software, integrazione, sica,
meccanica, lavoro in team (dinamiche di gruppo).
Due gruppi hanno come relatore P. Ceppi
Due gruppi hanno come relatore A. Weston.
7
Docenti responsabili
Relatore: Paolo Ceppi
Indirizzo email: [email protected]
Corelatore: Allen Weston
Indirizzo email: [email protected]
Studenti
Andrea Crivelli, [email protected]
Roberto Perdetti, [email protected]
Date del progetto
Proposta: Ottobre 2006
Consegna: Febbraio 2006
8
1 INTRODUZIONE
Un CubeSat è un piccolo satellite di dimensioni 10x10x10 centimetri, pesante solo un chilogrammo e realizzato tipicamente con componenti disponibili nei settori commerciali di elettronica. Viene classicato come picosatellite.
Il California Polytechnic State University (Cal Poly) e la Standford University hanno introdotto il CubeSat nel mondo dell'accademia come occasione per le università di tutto il mondo di
prender parte al regno della scienza e dell'esplorazione dello spazio .
Attualmente, tantissime università, alcune aziende ed altre organizzazioni internazionali stanno sviluppando attivamente CubeSats. Anche aziende del calibro della Boeing si sono dedicate
allo sviluppo di questo progetto, attratte da bassi costi di messa in orbita. Infatti il progetto
CubeSat oltre ad un ottimo apporto didattico, è utile per testare nuovi componenti a costi
ridotti. Mettere in orbita un normale satellite per eettuare dei test è molto più oneroso, che
utilizzare piccoli Cubesat. Con la sua relativa piccola dimensione, CubeSat può essere prodotto e lanciato per una cifra circa di US$ 40,000(nel 2005 USA). Questa modica di prezzi verso
il basso, rispetto alla maggior parte dei lanci satelliti, ha reso a Cubesat un opzione realizzabile
per le scuole e le università. La maggior parte dei CubeSats trasporta uno o due strumenti
scientici come loro carico utile primario di missione. Alcuni progetti CubeSat hanno un sistema limitato di propulsione; per esempio, il progetto CubeSat del University of Illinois usa
un allineamento di piccoli propulsori allo ione.
Il 30 giugno 2003, cinque CubeSats universitari ed un CubeSat commerciale sono stati lanciati
su un razzo di Rockot dal luogo di lancio di Plesetsk in Russia. Il lancio è stato eseguito dai
servizi del Eurockot Launch Gmbh di Brema, Germania. I CubeSats a bordo erano :
• Aalborg University's AAU CubeSat
• Quakender's Quakesat
• Technical University of Denmark's DTUsat
• Tokyo Institute of Technology's CUTE-I
• University of Tokyo's XI-IV
• University of Toronto's CanX-1
Il 27 ottobre 2005, un veicolo di lancio Kosmos-3M lanciato da Plesetsk ha trasportato tre
CubeSats in orbita della missione di SSETI Express (Student Space Exploration & Technology
Initiative). I CubeSats a bordo erano:
• Norwegian University of Science and Technology's NCUBE2
• University of Tokyo's XI-V
• University of Würzburg's UWE-1
9
Il 21 febbraio 2006, il veicolo lanciatore M-V lanciato da Uchinoura, Giappone ha trasportato
un singolo CubeSat nell'orbita, chiamato:
• Tokyo Institute of Technology's CUTE-1.7
Il 26 luglio 2006, 14 CubeSats di 11 università, uno di un'azienda privata e un satellite commerciale, sono stati lanciati a bordo di un razzo del DNEPR, che si è guastato ed è andato distrutto
durante il lancio. Il Cal Poly si è occupato dei particolari di guasto del lancio. Attualmente
si crede che tutte le parti dei satelliti siano andate distrutte. Il lancio ha trasportato:
• ION by University of Illinois at Urbana Champaign, U.S.
• KUTESAT-1 by University of Kansas, U.S.
• NCUBE-1 by Norwegian University of Science and Technology, Norway
• Rincon 1 by University of Arizona, U.S.
• SACRED by University of Arizona, U.S.
Per quanto riguarda i futuri lanci, sette Cubesats saranno lanciati come carico utile secondario
su un razzo del DNEPR un giorno attualmente ancora non specicato nel 2007. Questo lancio
è stato progettato a lungo termine, per essere il secondo lancio del Cal Poly.
Progetto TIsat-1
Il progetto CubeSat della SUPSI è nato circa due anni fa. La SUPSI ha deciso di creare
un laboratorio per la progettazione del satellite chiamato: TIsat-1. Sono state parecchie le
attività sviluppate dal SUPSI SpaceLab, da conferenze a incontri, da giornate dedicate agli
studenti di scuole superiori alla creazione di un sito internet. All'interno del sito vi è anche un
forum dove si possono scambiare idee ed informazioni con la collaborazione di persone esperte
nel campo. L'obbiettivo dello SpaceLab della SUPSI è quello di progettare, creare e lanciare
nello spazio un satellite che rispetti le norme CubeSat, Il TIsat-1. Tutte le speciche di questi
particolari tipi di satelliti sono consultabili su vari siti web.
10
2 REQUISITI E SPECIFICHE
Di che si tratta:
• Sistema completo di alimentazione per satellite TIsat-1.
Chi deve decidere:
• Lo sviluppo è eseguito in team. Vengono sottoposte delle proposte all'intero del team, e
si discute sulla validità della soluzione trovata.
Libertà:
• Abbiamo la libertà di sviluppare il sistema di alimentazione secondo le nostre idee, queste
però dovranno essere sottoposte continuamente al resto del team .
• Abbiamo la possibilità di scegliere tecnologie e materiali da utilizzar, ma anche queste
dovranno essere sottoposte al resto del team.
Condizioni marginali:
• Uso di pannelli solari CESI e Solterra.
• Limiti di dimensioni e peso dettati dalle speciche Cubesat.
Termini:
• Termine di consegna: venerdì 16 febbraio 2007-02-07
• Breeng settimanale: tutti i lunedì alle ore 11.45 AM.
Mezzi:
• Conoscenze personali apprese durante i vari corsi.
• Conoscenze di persone esterne al progetto
• Conoscenze di altri team Cubesat di tutto il mondo
• Libri e ricerche su web.
11
Rischi:
• Condizioni atmosferiche estreme
• Usure e danneggiamenti HW
• Lancio
12
3 STUDIO DELLE SOLUZIONI
3.1 Tecnologia fotovoltaica
3.1.1 Introduzione
Lo sviluppo della tecnologia solare è in continua fase di sviluppo, infatti da sempre il sole è
utilizzato come risorsa per la produzione di energia. Soltanto negli ultimi cinquant'anni però,
questa tecnologia ha riscosso molti successi. Grazie alle nanotecnologie è stato possibile creare
pannelli fotovoltaici sempre più piccoli e performanti.
Se nell'uso quotidiano la tecnologia solare non risulta ancora indispensabile, è facilmente comprensibile la sua importanza nelle applicazioni spaziali. Infatti l'unica fonte di energia disponibile al di fuori dall'atmosfera è quella solare. Vediamo quindi qui di seguito il funzionamento
di un pannello solare.
3.1.2 Funzionamento celle solari
Le celle fotovoltaiche sfruttano la conversione fotovoltaica. Un fenomeno sico che permette
di trasformare l'energia luminosa in energia elettrica. Le celle sono realizzate con materiali
semiconduttori.
L'eetto fotovoltaico consiste nella generazione di una dierenza di potenziale elettrico. Le
celle sono costituite solitamente da due strati di semiconduttore (single Junction) in contatto
fra loro. Uno strato è di tipo n (eccesso di cariche negative), e uno è di tipo p (eccesso di
cariche positive).
Sulla giunzione (zona di contatto tra i due strati) si crea una barriera di potenziale. Ciascun
fotone libera all'interno della giunzione una coppia elettrone-lacuna che contribuisce alla conduzione elettrica del semiconduttore. Gli elettroni possono passare solo dallo strato p a quello
n, e non viceversa. Si crea così un eccesso di elettroni nello strato n.
Figura 1: Cella fotovoltaica
Ora è facilmente intuibile che, collegando un conduttore a ciascuno degli strati p e n, e
chiudendo il circuito si otterrà un movimento di elettroni. Come possiamo osservare nella
gura 2 è importante che la luce penetri in entrambi gli strati, ed è per questo motivo che il
13
primo strato risulta più sottile rispetto al secondo.
Andiamo ad analizzare ora la caratteristica elettrica di una cella, prendendo come esempio
una cella al silicio a singola giunzione
Caratteristiche cella: I in funzione di U con l'inusso della temperatura.
Figura 2: Curva caratteristica
Possiamo notare la gura 3 che presenta la curva caratteristica di una cella solare. Il maggior
rendimento della cella è dato dal punto in cui il prodotto fra la corrente e la tensione è massimo.
14
3.1.3 Funzionamento Modulo solare
Un pannello solare non è nient'altro che una combinazione di celle solari. Collegandole in
serie fra loro si sommano le tensioni di soglia, mentre collegandole in parallelo si sommano le
correnti (Fig.3).
Figura 3: Circuito equivalente di una cella solare
Legenda:
Iph = corrente generata dalla cella solare
ID = corrente nel diodo
Ip = corrente nella resistenza in parallelo
Ic = corrente utile generata dalla cella solare
VD = caduta di tensione sulla giunzione
Vc = Tensione utile generata dalla cella solare
Rs = Resistenza serie
Rp = Resistenza parallelo
La generazione di corrente Iph per eetto della radiazione luminosa é rappresentata da un
generatore di corrente in parallelo con un diodo che rappresenta la giunzione p-n. La resistenza
serie Rs rappresenta la resistenza ohmica nei contatti di metallo, nel materiale semiconduttore
e delle perdite elettriche nel collegamento metallo-semiconduttore. La resistenza parallela Rp
rappresenta la resistenza data dalle correnti parassite tra la parte superiore e quella inferiore
della cella ed all'interno del materiale dalle inomogeneità o impurità. La tensione Vc è data
dalla tensione di giunzione, con questa che varia a seconda del materiale con cui è costruita la
cella solare. Per l'ordine di grandezza dei componenti possiamo dire che Rp assume un valore
attorno ad un centinaio di kOhm mentre la resistenza Rs assume un valore ohmico basso,
qualche mOhm. Sul mercato esistono vari tipi di pannelli solari, i materiali più utilizzati per
la loro costruzione sono il silicio e l'arsenurio di gallio. Il rendimento dei moderni pannelli
solari varia fra l'8-28%.
Per il progetto TIsat-1 abbiamo a disposizione vari tipi di celle solari prodotte da due ditte
specializzate, la CESI di Milano e la Solterra di Chiasso.
15
Qui di seguito (Fig.4) è riportata la caratteristica della potenza erogata da un pannello solare
in funzione della tensione, con l'inusso dell'irraggiamento e della temperatura.
Figura 4: Potenza(U)
Possiamo notare che il punto in cui la potenza erogata dal pannello è massima corrisponde al
punto in cui la derivata della potenza in funzione della tensione è zero.
16
3.2 Studio MPP
3.2.1 Introduzione
In precedenza abbiamo parlato di cosa si tratta il punto di massima potenza (MPP). In questo
capitolo andremo ad analizzare i circuiti in grado di estrarre dal pannello solare la massima
potenza.
Per lavorare sul punto di massima potenza si può agire in diversi modi, sono infatti molti i
tipi di circuiti utilizzabili. Noi andremo ad elencarne tre, due di essi si basano sul metodo
tensione costante mentre l'ultimo si basa sul metodo Hill climbing detto anche Perturba
e osserva.
3.2.2 Metodo Tensione costante
Con interruttore o cella di misura:
Figura 5: TC-con interruttore
Il funzionamento di questo circuito è facilmente comprensibile. Il metodo prevede l'approssimazione al 76% della tensione di soglia del pannello solare, infatti posizionandoci al 76% della
tensione di soglia, riusciremmo a lavorare approssimativamente sul punto di massima potenza.
Il problema consiste nel fatto che per eettuare tale misura bisogna staccare per alcuni istanti
il pannello dal resto del circuito, per poter far questo dobbiamo quindi inserire un interruttore
controllabile dal microprocessore oppure utilizzare una singola cella per ricavare i parametri
17
necessari al calcolo. Staccare il pannello per alcuni istanti, o utilizzare una cella per misurare
la tensione di soglia a vuoto del pannello causa però una perdita di energia, quindi il rendimento del circuito realizzato con questo metodo non potrà essere molto performante. A questo
metodo è perciò preferibile il metodo che prevede l'utilizzo di un sensore di temperatura.
3.2.3 Metodo Tensione costante con sensore di temperatura
Figura 6: TC-con sensore di temperatura
Il funzionamento di questo circuito è basato sull'approssimazione del punto di massima potenza
al 76% della tensione a vuoto del pannello. Il vantaggio di questo metodo rispetto a quello
visto in precedenza sta nel fatto che non si dovrà più ricorrere alla separazione del pannello
dal resto del circuito. Basterà quindi misurare la temperatura di lavoro del pannello mediante
un sensore per poter stabilire la tensione a vuoto. Infatti sappiamo che la tensione a vuoto
del pannello diminuisce linearmente in funzione dell'aumento della temperatura.
Misurando perciò la temperatura di lavoro, siamo in grado di conoscere la tensione a vuoto, e
di conseguenza di ssare al 76% di essa il punto di massima potenza.
Come ultima cosa, sarà suciente implementare un'algoritmo che dia la possibilità di variare
il duty-cycle dello stabilizzatore DC/DC, per lavorare sul punto desiderato. Lo svantaggio
di questo metodo è che se il modulo solare si altera nel tempo il rapporto temperatura di
lavoro - tensione di lavoro cambia, e quindi la nostra approssimazione non sarà più valida.
Questo porta questo circuito ad essere maggiormente esposto ad errori causati dall'usura e dal
deterioramento.
18
3.2.4 Metodo Hill Climbing
Figura 7: Metodo Hill climbing
Il funzionamento di questo circuito è semplice. Per prima cosa abbiamo il pannello solare che
si comporta come un generatore di corrente, poi troviamo uno stabilizzatore DC/DC switching
che ssa alla sua uscita una tensione suciente per caricare una batteria.
La batteria può essere considerata come un generatore di tensione costante con una resistenza
in serie. Sfruttando questo principio misuriamo la corrente all'uscita dello stabilizzatore e
con una convertitore A/D passiamo il suo valore ad un microprocessore. Conoscendo la tensione, e la corrente siamo in grado di determinare la potenza, basta quindi guardare quando
la derivata della funzione P(U) è uguale a zero per trovare il giusto duty cycle da passare allo
stabilizzatore.
Variando il duty cycle, il carico che vede il modulo solare varia. Sarà quindi suciente implementare un algoritmo capace di settare il duty cycle in funzione della corrente di carica della
batteria.
Molto probabilmente il metodo migliore fra i tre proposti è quello basato sul metodo hill
climbing, perché ci permette di sfruttare meglio l'energia prodotta dal pannello. L'alternativa migliore a questo sistema è quella dell'approssimazione mediante sensore di temperatura,
in quanto più facile da implementare rispetto al primo metodo visto, e più eciente per quel
che riguarda l'energia fornita.
È comprensibile però che le probabilità di rottura di questi circuiti confronto al cablaggio diretto aumentano parecchio, infatti andremo a introdurre nel circuito uno convertitore DC/DC
e un convertitore A/D (il micro è comunque parte integrante del sistema, quindi non viene
considerato).
19
Questo fa si che i circuiti in analisi sono sì molto importanti per quel che riguarda il rendimento
fornito, ma lo sono altrettanto per quel che riguarda le possibilità di mal funzionamenti e
rotture possibili. Per questo motivo tratteremo la base dello studio sull'adabilità dei circuiti
elettrici, che ci permetterà di stabilire la scelta migliore.
Ulteriore documentazione sul metodo hill clinbing e sul metodo a tensione costante sono
disponibili negli allegati, sotto il capitolo MPP.
20
3.3 Convertitori DC/DC switching
3.3.1 Introduzione
Abbiamo visto che per lavorare sul punto di massima potenza necessitiamo di convertitori
dc/dc. In questo capitolo cercheremo di dare una breve spiegazione sul loro funzionamento,
tenendo conto che questo capitolo non vuole essere un documento esaustivo, ma soltanto un
accenno sul funzionamento, e sulle caratteristiche dei convertitori dc/dc.
Prima di analizzare le varie topologie circuitali, riassumiamo in una tabella il motivo per cui
non abbiamo preso in considerazione gli stabilizzatori lineari.
Figura 8: Confronto convertitori
Possiamo notare come gli stabilizzatori lineari abbiano caratteristiche migliori di quelli switching dal punto di vista della durata di vita, della velocità di regolazione e della tolleranza ai
disturbi.
Il problema è che questo tipo di circuito non può essere utilizzato nei circuiti visti al capitolo
3.2. Inoltre lo scarso rendimento non ci avrebbe comunque aiutati, infatti un rendimento
massimo del 65% risulta essere troppo basso per un'applicazione spaziale.
21
3.3.2 Topologia Step-up
Il principio di lavoro della topologia step-up è quella di avere sempre una tensione di uscita
maggiore di quella d'entrata. Analizzeremo il circuito seguente, per rendere meglio l'idea del
funzionamento.
Figura 9: Schema di principio del convertitore step-up
Al momento della chiusura dell'interruttore la sezione d'uscita risulta essere isolata, e l'ingresso
fornisce energia alla bobina. Quando invece l'interruttore è aperto, la sezione d'uscita riceve
energia sia dall'ingresso, che dalla bobina, questo causa un tensione d'uscita maggiore rispetto
a quella d'entrata.
Nella realtà l'interruttore è composto da un transistor. Il transistor viene spento al tempo
t = δ T, con δ che rappresenta il duty cycle.
Trattiamo ora il problema da un punto di vista analitico:
Quindi:
Al tempo t = δ T il transistor, che nel nostro caso è rappresentato da S, viene spento. La
corrente continua a scorrere attraverso il carico, e decresce con una pendenza che vale:
Quindi:
Dal momento che ∆IL è identico nei due casi, si può scrivere che:
22
Da cui la formula nale che a noi interessa per sapere come variare il duty cycle:
Dal momento che δ è compreso tra 0 e 1 il risultato sarà sempre maggiore di 1, e quindi il
circuito si comporta da elevatore.
Figura 10: Funzionamento del convertitore step-up
23
3.3.3 Topologia Step-down
Il convertitore step-down fornisce una tensione di uscita più bassa di quella d'entrata. Variando
il duty cycle dell'interruttore si può controllare il livello della tensione di uscita.
Figura 11: Schema di principio del convertitore step-down
Come nel caso della topologia step-up, il transistor viene spento al tempo t = δ T.
Aprendo l'interruttore all'uscita del circuito avremo solamente l'energia immagazzinata nella
bobina, e quindi una tensione inferiore a quella d'entrata.
Risolvendo anche in questo caso analiticamente il problema siamo in grado di trovare la relazione fra la tensione d'uscita e il duty cycle.
Quindi:
Al tempo t = δ T il transistor, che nel nostro caso è rappresentato da S, viene spento. La
corrente continua a scorrere, e decresce con una pendenza che vale:
Quindi:
Dal momento che ∆IL è identico nei due casi, si può scrivere che:
Da cui la formula nale che a noi interessa per sapere come variare il duty cycle:
Dal momento che δ è compreso tra 0 e 1 il risultato sarà sempre minore di 1, e quindi il circuito
si comporta da riduttore.
24
Il graco in gura 12 riporta il funzionamento del convertitore studiato.
Figura 12: Funzionamento del convertitore step-down
25
3.3.4 Topologia Step-up-down
Figura 13: Schema del convertitore step-up-down
Funzionamento in modo continuo:
Il graco in gura 14 mostra l'andamento delle varie tensioni e correnti nel funzionamento in
modo continuo. Il transistor è in conduzione da t = 0 a t = δ T . La corrente nella bobina sale
con una pendenza di:
Quindi:
Al tempo t = δ T il transistor viene spento. La corrente continua a scorrere attraverso il diodo
e il carico, e decresce con una pendenza che vale:
Quindi:
Dal momento che ∆IL è identico nei due casi, si può scrivere che:
Da cui la formula nale che a noi interessa per sapere come variare il duty cycle:
26
Come si può notare dalla formula 18, il circuito si comporta da elevatore di tensione se δ >
0.5, mentre si comporta da riduttore per δ < 0.5.
Figura 14: Funzionamento in modo continuo
27
Funzionamento in modo discontinuo:
In questo caso tutta l'energia immagazzinata nella bobina viene fornita al carico. Il graco
della gura 15 mostra l'andamento delle varie tensioni e correnti nel funzionamento discontinuo.
L'energia accumulata durante il tempo δ T vale:
L'energia restituita durante il tempo (T - δ T) è:
Dato che tutta l'energia immagazzinata nella bobina viene trasferita al carico:
Sostituendo:
Risolvendo:
28
Figura 15: Funzionamento in modo discontinuo
Si ottiene un controllo di potenza costante. Si può notare come la tensione d'uscita aumenti
se il carico diminuisce.
Dobbiamo tenere in considerazione il fatto che per piccole potenze i regolatori switching non
permettono di avere rendimenti molto alti, quindi ben dicilmente si arriverà a rendimenti
del 90%.
29
3.4 Studio irraggiamento solare
3.4.1 Introduzione
In precedenza è stato detto che il pannello solare si comporta come una sorgente di corrente,
Tale corrente dipende dall'intensità della luce ricevuta e dal suo angolo di incidenza. Abbiamo
quindi provveduto a simulare tale situazione grazie all'ausilio di TINA. In pratica abbiamo
programmato un generatore di corrente in maniera tale da simulare il comportamento del
pannello una volta in orbita. Qui di seguito riportiamo lo studio eettuato.
3.4.2 Simulazione
Situazione analizzata:
Figura 16: Situazione analizzata
30
Per realizzare la seguente simulazione abbiamo simulato di avere il sole in rotazione attorno
al cubo, e il cubo in rotazione su se stesso.
Circuito utilizzato:
Figura 17: Circuito utilizzato
Grazie al generatore di corrente programmabile siamo in grado di ricostruire qualsiasi tipo di
funzione. È bastato eseguire uno studio matematico relativo alla nostra situazione per poter
derivare una funzione che simulasse approssimativamente la nostra situazione.
Ambiente di sviluppo:
Figura 18: Ambiente di sviluppo
Nella gura 18 sono rappresentati gli screenshoot dell'ambiente di sviluppo di TINA che
abbiamo utilizzato per l'implementazione della funzione, qui di seguito riportiamo i codici,
gentilmente messi a disposizione dal docente ,utilizzati per le varie facce del cubo. Analizzando
i codici possiamo notare come le formule matematiche utilizzate siano legate all'algebra lineare.
Infatti sono state utilizzate le formule delle coordinate sferiche.
31
Codici sorgente:
Pannello X+ e X-:
Function Signal(t);
Begin
f1 := 50;
f2 := 5*pi;
Teta := (2*pi*f1*t);
Phi := (2*pi*f2*t);
Xx := 5;
Xy := 1;
Xz := -4;
MoX := sqrt(sqr(Xx)+sqr(Xy)+sqr(Xz));
SigInta := 1*1/MoX * (sin(Teta)*cos(Phi)*Xx+sin(Teta)*sin(Phi)*Xy+cos(Teta)*Xz);
SigIntb := -1*1/MoX * (sin(Teta)*cos(Phi)*Xx+sin(Teta)*sin(Phi)*Xy+cos(Teta)*Xz);
Signal := ((SigIntb + abs(SigIntb))/2+(SigInta + abs(SigInta))/2)
End;
Pannello Y+ e Y-:
Function Signal(t);
Begin
f1 := 50;
f2 := 5*pi;
Teta := (2*pi*f1*t);
Phi := (2*pi*f2*t);
Yx := 1;
Yy := 3;
Yz := 2;
MoY := sqrt(sqr(Yx)+sqr(Yy)+sqr(Yz));
SigInta := 1*1/MoY * (sin(Teta)*cos(Phi)*Yx+sin(Teta)*sin(Phi)*Yy+cos(Teta)*Yz);
SigIntb := -1*1/MoY * (sin(Teta)*cos(Phi)*Yx+sin(Teta)*sin(Phi)*Yy+cos(Teta)*Yz);
Signal := ((SigIntb + abs(SigIntb))/2+(SigInta + abs(SigInta))/2)
End;
32
Pannello Z+ e Z-:
Function Signal(t);
Begin
f1 := 50;
f2 := 5*pi;
Teta := (2*pi*f1*t);
Phi := (2*pi*f2*t);
Zx := 1;
Zy := -1;
Zz := 1;
MoZ := sqrt(sqr(Zx)+sqr(Zy)+sqr(Zz));
SigInta := 1*1/MoZ * (sin(Teta)*cos(Phi)*Zx+sin(Teta)*sin(Phi)*Zy+cos(Teta)*Zz);
SigIntb := -1*1/MoZ * (sin(Teta)*cos(Phi)*Zx+sin(Teta)*sin(Phi)*Zy+cos(Teta)*Zz);
Signal := ((SigIntb + abs(SigIntb))/2+(SigInta + abs(SigInta))/2)
End;
Intero sistema:
Function Signal(t);
Begin
f1 := 50;
f2 := 5*pi;
Teta := (2*pi*f1*t);
Phi := (2*pi*f2*t);
Xx := 5;
Xy := 1;
Xz := -4;
Zx := 1;
Zy := -1;
Zz := 1;
Yx := 1;
Yy := 3;
Yz := 2;
33
MoX := sqrt(sqr(Xx)+sqr(Xy)+sqr(Xz));
MoY := sqrt(sqr(Yx)+sqr(Yy)+sqr(Yz));
MoZ := sqrt(sqr(Zx)+sqr(Zy)+sqr(Zz));
SigIntxa := 1*1/MoX * (sin(Teta)*cos(Phi)*Xx+sin(Teta)*sin(Phi)*Xy+cos(Teta)*Xz);
SigIntxb := -1*1/MoX * (sin(Teta)*cos(Phi)*Xx+sin(Teta)*sin(Phi)*Xy+cos(Teta)*Xz);
SigIntya := 1*1/MoY * (sin(Teta)*cos(Phi)*Yx+sin(Teta)*sin(Phi)*Yy+cos(Teta)*Yz);
SigIntyb := -1*1/MoY * (sin(Teta)*cos(Phi)*Yx+sin(Teta)*sin(Phi)*Yy+cos(Teta)*Yz);
SigIntza := 1*1/MoZ * (sin(Teta)*cos(Phi)*Zx+sin(Teta)*sin(Phi)*Zy+cos(Teta)*Zz);
SigIntzb := -1*1/MoZ * (sin(Teta)*cos(Phi)*Zx+sin(Teta)*sin(Phi)*Zy+cos(Teta)*Zz);
Signal := (((SigIntxb+SigIntyb+SigIntzb) + abs(SigIntxb+SigIntyb+SigIntzb))/2+
+((SigIntxa+SigIntya+SigIntza) + abs(SigIntxa+SigIntya+SigIntza))/2) End;
Questi sono i codici per la programmazione dei pannelli. L'utilizzo dell'ambiente di sviluppo
di TINA è molto semplice da intuire. Guardando i codici troviamo una prima fase che serve a
denire le variabili, e una seconda che serve ad eseguire i calcoli necessari per lo sviluppo. In
tutti i codici per estrarre il segnale nale è stato necessario utilizzare un piccolo accorgimento.
Abbiamo messo in atto una formula che ci ha permesso di estrarre solamente la parte positiva
del segnale, azzerando quella negativa, questo perchè un modulo solare genera corrente quando
è esposto al sole, e non genera niente quando si trova in ombra. Abbiamo studiato un solo
scenario, ma in realtà ci sarebbero ancora molti scenari simulabili. Riportiamo ora le soluzioni
ottenute da questa simulazione in maniera graca.
Pannelli X+ e X-:
Figura 19: Corrente X+X-
34
Pannelli Y+ e Y-:
Figura 20: Corrente Y+YPannelli Z+ e Z-:
Figura 21: Corrente Z+Z-
35
Intero sistema:
Figura 22: Corrente intero sistema
I tempi riportati nei graci non sono assolutamente indicativi. Per defezione professionale
abbiamo utilizzato una frequenza di 50 Hz, ma in realtà non sappiamo la frequenza con cui
ruoterà il satellite quando sarà in orbita. Quello che ci interessa è il comportamento della
corrente, ecco perchè la frequenza e quindi i tempi utilizzati non inuiscono nel nostro studio.
Nello spazio avremo situazioni ben denite, infatti il satellite si troverà o esposto al sole, o in
una zona di penombra, o in totale oscurità. Quando si trova esposto al sole l'irraggiamento
ricevuto dai vari pannelli è descritto dalla simulazione eseguita in precedenza. Per complessità
e tempo non abbiamo potuto simulare il comportamento del satellite durante una sua orbita
attorno alla terra. Cerchiamo comunque di rendere più chiare le situazioni in cui il nostro
sistema sarà operativo con un paio di rappresentazioni grache. La gura 23 rappresenta la
rotazione della terra attorno al sole. Quest'immagine ci permette di capire come il satellite si
trovi sempre in posizioni diverse rispetto al sole. Quindi ogni giorno saranno diversi i tempi
in cui il satellite verrà a trovarsi esposto a irraggiamento.
Figura 23: Sistema solare 1
36
La gura 24 rappresenta le tre fasi in cui potrà trovarsi il satellite, si può infatti osservare la
zona d'ombra, quella di penombra e quella di esposizione al sole. Questo tipo di situazioni
inuirà non solo sulla generazione di potenza, ma anche sulla temperatura di lavoro esterna
del satellite
Figura 24: Sistema solare 2
Noi abbiamo eettuato un paio di simulazioni, ma su questo tema si potrebbero dedicare molte
varianti dierenti, in realtà, innite. Riteniamo che TINA sia uno strumento estremamente
ecacie, in quanto permette di fare molteplici studi con estrema semplicità.
37
3.5 Celle solari CESI
3.5.1 Introduzione
Nei primi giorni di novembre abbiamo eettuato una visita presso la ditta CESI di Milano,
per cercare una collaborazione nell'ambito della realizzazione di pannelli solari. Siamo stati
positivamente colpiti sia dalla loro disponibilità, che dalla loro professionalità.
Le celle solari della ditta CESI sono molto ecienti, infatti sono realizzate con GaAs a singola
o tripla giunzione e possono raggiungere un'ecienza pari al 28%. Qui di seguito riporteremo
alcune informazioni riguardanti tali celle. Il resto delle informazioni sono disponibili negli
allegati, nel capitolo celle solari.
Dimensioni disponibili:
Caratteristiche elettriche:
Queste celle sono interessanti, perché grazie all'alta ecienza, garantiscono un buon apporto
di potenza. Dai dati fornitici dal produttore sappiamo che la tensione fornita dal pannello
solare diminuisce di 2 mV per ogni grado in più di temperatura di lavoro, mentre la corrente
aumenta di 17 µA.
Ora, per poter caricare una batteria, necessitiamo di una tensione all'uscita del pannello suciente a garantire la tensione di carica. Dai calcoli eseguiti nel foglio di lavoro excel (disponibile
negli allegati, le studio pannello.xls) un pannello dotato di 8 celle singola giunzione 20x40
mm riesce a fornire una tensione suciente no ad una temperatura di lavoro molto elevata.
Noi stimiamo che la temperatura di lavoro una volta in orbita sia circa di 50◦ C.
Qui di seguito riportiamo uno studio più dettagliato, prima dal punto di vista meccanico, poi
da quello elettrico, con la simulazione di un circuito per le celle CESI che abbiamo ritenuto le
più interessanti.
38
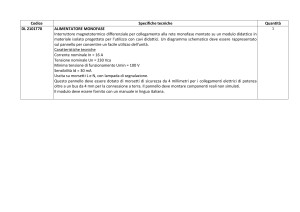
3.5.2 Parti meccaniche
Figura 25: Speciche Cubesat
Questo studio ci permette di capire la disposizione delle celle sui vari pannelli, inoltre permetterà di scegliere la disposizione migliore in funzione delle nostre esigenze. Prima di guardare
i parametri elettrici, ci concentriamo su un paio di considerazioni meccaniche, infatti è importante lasciare lo spazio necessario al ssaggio del pannello allo scheletro del satellite.
È molto importante che le viti che ssano il pannello solare alla struttura del satellite siano
posizionate in modo da lasciare libera più supercie possibile. Questo per poter posizionare
il maggior numero di celle solari. Starà al costruttore meccanico trovare la soluzione migliore
per la tenuta dei pannelli alla struttura portante.
39
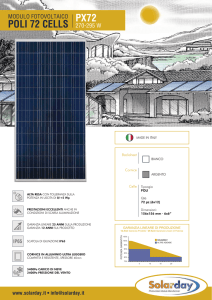
3.5.3 Disposizione celle
Celle singola giunzione 20x40 mm:
Figura 26: Celle 20x40 mm
La supercie dedicata al cablaggio, è quella minima prescritta dal progetto cubesat, in caso
di una necessità superiore, bisognerà lavorare nelle zone di supercie utile non usate dalle
celle solari. Quindi la supercie utilizzabile per il cablaggio del pannello solare al satellite,
è rappresentata dalla somma della supercie dedicata più quella utile, purche la funzionalità
delle celle solari non venga compromessa.
40
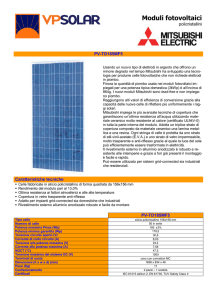
Celle tripla giunzione 40x80 mm:
Figura 27: Celle 40x80 mm
La supercie dedicata al cablaggio, è quella minima prescritta dal progetto cubesat, in caso di
una necessità superiore, bisognerà lavorare nelle zone di supercie utile non usate dalle celle
solari.
Quindi la supercie utilizzabile per il cablaggio del pannello solare al satellite, è rappresentata
dalla somma della supercie dedicata più quella utile, purche la funzionalità delle celle solari
non venga compromessa. Come possiamo notare, la facciata dedicata ai cablaggi esterni
(access port) permette l'utilizzo di una sola cella solare, quindi è preferibile utilizzare altre
tipologie di celle per questa faccia.
41
3.5.4 Peso pannello
I seguenti calcoli sono relativi ad un singolo pannello realizzato con diverse celle. Considerando una densità per il materiale FR4 di 1.91 kg/dm3 , per l'alluminio di 2.6 kg/dm3 e per la
bra di carbonio di 1.71 kg/dm3 . Supponiamo che lo spessore del substrato RF4 sia di 2.54
mm, quello dell' alluminio e quello della bra di 2 mm. La formula che ci permette di stabilire
la massa di un singolo pannello è la seguente:
Con:
L = lato del pannello
d = spessore del substrato
ρ = densità del substrato
n = numero di celle
pc = peso di una singola cella
Con peso specico di una cella si intende il peso della cella più il vetrino di protezione e i
connettori.
Per le celle CESI utilizziamo i dati fornitici dagli ingegneri della ditta di Milano.
Dai loro calcoli risulta che il peso di una singola cella 20x20 mm è di 1.2 g, mentre quello di
una cella 40x80 è di 3.5 g. Al peso complessivo calcolato come (peso pannello + peso di una
cella * n◦ celle) va aggiunto un ulteriore 25% di margine per tenere conto dell'eventuale foglio
di kapton da stendere sulla supercie del pannello e delle resine di incollaggio delle celle sul
substrato, più il wiring ed i dispositivi di protezione.
8 celle singola giunzione CESI 20x20 mm:
Il pc di una singola cella è di 1.2 g
• FR4 = 60.51 g
• ALU = 64 g
• Composito leggero: Fibra di Carbonio = 46.2 g
2 celle tripla giunzione CESI 40x80 mm:
Il pc di una singola cella è di 3.5 g
• FR4 = 57.26 g
• ALU = 60.75 g
• Composito leggero: Fibra di Carbonio = 42.95 g
Ovviamente il fatto importante da tenere in considerazione è che realizzando il pannello solare
direttamente con un substrato FR4 non avremo più la necessità di realizzare altri circuiti
stampati per il resto della componentistica. Infatti sarebbe utilizzabile il retro del pannello
42
solare. Quindi guardando i dati calcolati possiamo dire che i materiali da preferire sono l'FR4 o
la bra di carbonio. Per la scelta del materiale saranno da tenere in considerazione le opinioni
di chi assemblerà i pannelli solari, e di chi si occuperà della parte meccanica.
3.5.5 Simulazione
La simulazione è stata eettuata con fogli di lavoro excel. Abbiamo per prima cosa ricostruito
la curva con dati che rispecchiano quelli di una cella solare, poi abbiamo eseguito su di essa
calcoli in base alla temperatura, e ai vari tipi di celle solari. Grazie a questa simulazione
otteniamo importanti informazioni riguardanti le varie tipologie di pannello solare. Rendiamo
attenti del fatto che le simulazioni si basano su dati reali, ma approssimati, quindi la caratteristica delle curve ottenute nei graci non rispecchiamo al 100% la realtà. Queste misure
sono state eseguite per osservare le caratteristiche più rilevanti di ogni pannello, ecco perché
abbiamo eettuato approssimazioni e non simulazioni precise.
Circuito simulato:
Figura 28: Circuito di carica
43
Celle CESI singola giunzione 20x40 mm:
Figura 29: Pannello 20x40 mm
La prima simulazione che abbiamo eettuato riguarda l'utilizzo di celle solari singola giunzione
CESI, connesse in serie fra loro.
Questo per ottenere una tensione suciente a caricare direttamente una batteria.
La gura 29 riporta la disposizione delle celle solari sul pannello.
Graco:
Figura 30: Graco pannello 20x40 mm
Per trovare la curva del pannello, abbiamo eseguito delle approssimazioni con excel, che ci
hanno permesso, partendo dalla caratteristica di una cella solare, di ricreare il comportamento di un intero pannello, in funzione della temperatura. Tutte le simulazioni che abbiamo
eettuato sono disponibili nel cd allegato, sottoforma di fogli di lavoro excel.
Risultati:
La Ubatt rappresenta la tensione di carica di una batteria standard litio ioni, da 4.2 Volt.
Sappiamo che nchè la retta di carico si mantiene sotto la tensione a vuoto del pannello la
batteria verra caricata correttamente.
Per commentare i risultati prendiamo come riferimento la temperatura di 50 ◦ C.
Dal graco si può notare come la potenza utile utilizzata cablando la batteria direttamente
al pannello solare sia pari a 1.1 W, quella utilizzata lavorando sul punto di massima potenza
stimato al 76% è di 1.3 W mentre quella al punto di massima potenza reale è di 1.5 W.
44
Facendo gli opportuni calcoli troviamo i seguenti risultati:
Con un rendimento rispetto al MPP pari al:
Supponendo un rendimento dell'90% del regolatore dc/dc necessario nel circuito che lavora
sul punto di massima potenza otterremo:
Notiamo quindi che lavorando su un punto di massima potenza stimato al 76% (metodo a
tensione costante) otteniamo un rendimento molto simile rispetto al cablaggio diretto. Inoltre
introducendo più circuiteria, aumenteremo anche le possibilità di rotture e mal funzionamenti.
Per questa temperatura di lavoro notiamo come la soluzione migliore sia quella data dal
cablaggio che lavora sul punto di massima potenza reale (metodo perturba e osserva).
45
Celle CESI tripla giunzione 40x80 mm:
Figura 31: Pannello 40x80 mm
La seconda simulazione che abbiamo eettuato riguarda l'utilizzo di celle solari tripla giunzione, connesse in serie fra loro.
Questo per ottenere una tensione sucientemente alta all'uscita del pannello.
La gura 31 riporta la predisposizione delle celle solari sul pannello.
Graco:
Figura 32: Graco pannello 40x80
Dal graco notiamo come l'utilizzo di una normale batteria Litio ioni non sia possibile, infatti,
per una temperatura di lavoro di 25 ◦ C la batteria verrebbe caricata nella migliore delle
condizioni, ma per le temperature superiori, sfrutteremo molto poco la potenza fornita o
addirittura non riusciremmo a sfruttarla. Per ovviare a questo inconveniente dobbiamo cercare
una batteria con una tensione inferiore. Perfetta per il nostro caso sarebbe una batteria con
tensione di sogli di circa 3.6 Volt.
46
Supponendo di riuscire a trovare una batteria del genere otterremo i seguenti risultati:
I risultati sono riferiti ad una temperatura di 50 ◦ C.
Con un rendimento rispetto al MPP pari al:
Supponendo un rendimento dell'90% del regolatore dc/dc necessario nel circuito che lavora
sul punto di massima potenza otterremo:
Notiamo come una batteria con tensione di 3.6 V sia perfetta per noi, infatti riusciremmo ad
avere ottimi rendimenti.
Con una circuiteria semplice ed adabile, si può pure osservare come le celle a tripla giunzione
siano molto più performanti rispetto a quelle a singola giunzione, infatti otteniamo un potenza
di circa 2.25 W, rispetto all' 1.5 W del caso precedente.
47
3.6 Celle solari Solterra
3.6.1 Introduzione
Abbiamo avuto contatti con la ditta Solterra di Chiasso, che si è detta disponibile ad una
collaborazione. Questa ditta produce celle monocristalline ed è disposta a produrle su misura.
Purtroppo la collaborazione è nata soltanto negli ultimi tempi, quindi non abbiamo potuto
avere le caratteristiche elettriche delle loro celle solari. Per avere almeno un'idea di quello che
ci aspetta utilizzando le loro celle abbiamo provveduto comunque ai vari studi, stimando i
valori necessari ai calcoli.
3.6.2 Parti meccaniche
Per le parti meccaniche Solterra valgono le stesse speciche delle celle solari CESI trattate al
capitolo 3.5.2.
48
3.6.3 disposizione celle
Per le celle Solterra abbiamo pensato di utilizzare celle di piccola dimensione, questo per poter
ottenere una tensione abbastanza elevata all'uscita del pannello.
Abbiamo deciso per celle di 20x20 mm, quindi la predisposizione di esse sul pannello sarà la
seguente (Fig.26).
Figura 33: Celle 20x20 mm
La supercie dedicata al cablaggio, è quella minima prescritta dal progetto cubesat, in caso di
una necessità superiore, bisognerà lavorare nelle zone di supercie utile non usate dalle celle
solari.
Quindi la supercie utilizzabile per il cablaggio del pannello solare al satellite, è rappresentata
dalla somma della supercie dedicata più quella utile, purche la funzionalità delle celle solari
non venga compromessa. Come possiamo notare, nel caso della facciata superiore e su quella
inferiore, potremo utilizzare 15 celle al posto di 16, per questo motivo è meglio utilizzare le
celle Solterra solamente nelle facciate laterali.
49
3.6.4 Peso Modulo solare
Per le celle Solterra non siamo in possesso di dati specici, quindi il peso nale del pannello risulta essere un'approssimazione. Non si deve far quindi riferimento a questi valori per
un calcolo preciso. Per poter eettuare il calcolo corretto bisogna attendere di conoscere le
caratteristiche delle celle solari da parte di Solterra.
16 celle silicio Solterra: Il pc di una singola cella è di 1 g
• FR4 = 68.51 g
• ALU = 72 g
• Composito leggero: Fibra di Carbonio = 54.2 g
50
3.6.5 Simulazione elettrica
Celle Solterra singola giunzione monocristalino al silicio 20x20 mm:
Figura 34: Pannello 20x20 mm
Avendo da poco intrapreso la collaborazione con la ditta Solterra, non siamo abbiamo avuto
modo di avere i parametri elettrici delle lore celle. Quindi abbiamo eetuato i calcoli con dati
di altre celle basate sulla tecnologia monocristallina al silicio. I caloli sono stati eseguiti con un
buon margine di sicurezza, quindi possiamo dire che le caratteristiche trovate sono abbastanza
pessimistiche. I risultati reali dovrebbero perciò essere migliori di quelli calcolati. Questo ci
permette di utilizzare i dati a scopo di ricerca senza problemi.
La caratteristica di queste celle dovrebbe essere la seguente:
Figura 35: Graco pannello 20x20
Dal graco notiamo come l'utilizzo di celle monocristalline al silicio non rendano come le celle
viste in precedenza, infatti sul punto di massima potenza riusciamo ad estrre una potenza di
1.05 Watt al massimo.
51
I risultati sono riferiti ad una temperatura di 50 ◦ C.
Con un rendimento rispetto al MPP pari al:
Supponendo un rendimento dell'90% del regolatore dc/dc necessario nel circuito che lavora
sul punto di massima potenza otterremo:
Dai risultati ottenuti notiamo come con un cablaggio diretto, otteniamo una potenza fornita
dal pannello di 0.6 W, mentre lavorando sul punto di massima potenza ne otterremmo 0.81.
Questi sono dati approssimativi, quindi non siamo in grado di decifrare quale metodo sia
meglio utilizzare. Una decisione potrà essere presa una volta ricevuti tutte le caratteristiche
elettriche delle celle Solterra.
Dopo queste simulazioni siamo però in grado di trarre utili informazioni riguardanti il cablaggio
da scegliere, le batterie da utilizzare, e le celle da scegliere.
52
3.7 Confronto tecnologie
Riassumiamo nella gura 29 le diverse caratteristiche viste: La tabella è riferita ad una
temperatura di lavoro di 50 ◦ C
Figura 36: Confronto moduli solari
Queste analisi sono importanti per scegliere il cablaggio da utilizzare, ma prima di fare una
scelta denitiva, procediamo con lo studio dell'adabilità di circuiti elettrici. Questo ci
permetterà di stabilire quale sarà il cablaggio più adabile.
53
3.8 Batterie
3.8.1 Introduzione
Una batteria è un dispositivo che immagazzina dell'energia in forma chimica. Le batterie
forniscono una tensione, dovuta a delle reazioni elettrochimiche tra gli elementi al loro interno.
L'accumulatore è una batteria la cui carica può essere completamente ristabilita mediante
l'applicazione di un'adeguata energia elettrica. Ne esistono di vari tipi, con diverse capacità
elettriche, dierenti composizioni chimiche, forma e dimensioni. Sono anche conosciute come
batterie secondarie, cellule secondarie (abbr. accu/akku)
3.8.2 Tipi di accumulatori
Accumulatori al Ni-Cd
Questo tipo di accumulatore è stato molto usato per applicazioni spaziali, quindi possiamo
aermare che sono degli accumulatori adabili a questo tipo di esigenze. L'accumulatore ha
una vita molto lunga (oltre 500 cicli di carica/scarica completi), ma un densità di energia
inferiore e risente dell'eetto memoria. La tensione nominale delle celle al nichel-cadmio è 1.2
V. L'energia specica di questo tipo di batterie è piccola e può raggiungere i 50 Wh/kg mentre
la potenza raggiunge i 200 W/kg. Contiene sostanze tossiche quali il cadmio.
Accumulatori al NiMH
Le batterie NiMH sono un'evoluzione di quelle nickel-cadmio (NiCd) e rispetto a queste ultime
presentano il vantaggio di avere una densità energetica (Wh/kg o Wh/dm3) del 30-40% in più,
e di aver eliminato l'uso del cadmio, un metallo pesante pericoloso. Hanno come caratteristica
una buona capacità di carica e una durata di vita più lunga rispetto a quelle al Ni-Cd. Come
le celle al cadmio hanno una tensione nominale di 1.2 V. Nelle applicazioni normali funzionano
molto bene ma ci si è resi conto che alle basse temperature subiscono delle perdite, nel caso di
questi accumulatori rendono solo per il 60 % delle loro capacità. Non abbiamo trovato nessun
progetto legato alle applicazioni spaziali che usa questo tipo di accumulatori. È possibile che
sia dovuto allo scarso funzionamento alle basse temperature oppure dai materiali non idonei
per lo spazio (vedi idrogeno).
54
Accumulatori al Li-Ion
Gli accumulatori al litio, hanno densità energetica, numero di cicli di carica-scarica e prestazioni
complessive parecchio maggiori rispetto a quelle possedute dalle batterie commerciali, ma anche costi più elevati. Vengono usate nei laptop, nei moderni telefoni e praticamente in tutti
i dispositivi portatili ad alta tecnologia e non risentono dell'eetto memoria. La tensione
nominale delle celle a Li-Ion è di 3.6 V. Questo accumulatore funziona a diversi range di
temperatura. Le caratteristiche di tensione a circuito aperto ( Open Circuit Voltage, OCV) è
variabile da 3.0 V a 4.2 V, dipendente dalla temperatura, dalla durata di immagazzinaggio e
dallo stato di carica. La tensione al termine della scarica (End Of Discharge Voltage, EODV)
è variabile da 2.75 V a 3.2 V e dipende pure questa dai parametri visti prima per l'Open
Circuit Voltage.
Accumulatori al Li-Pol
Il nuovo elettrolito di polimero fornisce l'adabilità e la durata di vita per più di 500 cicli
di ricarica. Unire questo con le caratteristiche di rendimento elevato (la densità di massa
166Wh/kg di energia e la densità volumetrica 348Wh/l di energia) porta ad avere una batteria
che soddisfa molte esigenze. Vengono usate per diverse applicazioni tra le quali telecamere
digitali, CD portatili, minidisc, PC portatili. L'intervallo di corrente operativo è incluso tra
3.2 e 2 V , a seconda del livello di scarica. Contrariamente ad altri tipi di batterie, le batterie
Litio Polimeri non hanno reazioni secondarie durante il processo di carica. Il grande vantaggio
è che durante la normale carica, l'ecienza Coulombiana delle celle è del 100% e l'ecienza
energetica è del 95%.
3.8.3 Carica accumulatori
Dapprima per capire come vengono caricati gli accumulatori è importante comprendere il
concetto di tasso di carica oppure di scarica. Viene denita C l'intensità di corrente di carica (
o scarica) indipendentemente dall'accumulatore usato. Se per esempio ci troviamo a caricare
o scaricare una batteria da 1 Ah con 2C, la corrente relativa vale due volte 1A, quindi 2A. Per
ricaricare gli accumulatori al nichel-cadmio il metodo comune è quello di caricare a corrente
costante ( C/10) per un periodo di circa 12 ore. I caricabatteria rapidi più recenti eettuano
la ricarica delle batterie al nichel utilizzando il metodo Delta-Peak in circa un'ora: maggiore
è l'intensità della corrente di carica, minore è il tempo di ricarica. Le batterie al litio vengono
invece caricate in due fasi; dato che nella prima fase il livello di carica non deve superare 0,7 C,
la carica completa richiede circa tre ore e non è possibile pertanto eettuare una vera ricarica
rapida. Carica con il metodo Delta-Peak: un caricabatteria rapido permette di ricaricare una
batteria al NiCd da 1.000 mAh con un livello di energia di 1 C (corrente di 1 A), come si può
vedere nel primo graco. La tensione della batteria aumenta no a che si raggiunge il picco
massimo (Delta- Peak) di circa 1,4 V.
A causa dei processi chimici interni, la tensione smette di salire e la carica termina con una
tensione inferiore di circa 20 mV rispetto al valore massimo; in alternativa il caricabatteria
55
Figura 37: Curve di carica
si porta nello stato di carica di mantenimento. In questo modo la batteria al nichel si carica
completamente in un'ora circa e non si scarica anche se rimane collegata al caricabatteria per
qualche giorno. La curva di carica delle celle al NiMH ha un andamento più piatto e la soglia
è meno netta rispetto alle celle al NiCd; il meccanismo di sconnessione del caricabatteria deve
pertanto risultare più sensibile rispetto a quello utilizzato per celle al NiCd. Carica in due
fasi: le batterie agli ioni di litio e al litio-polimero richiedono una tecnica di carica speciale,
che solitamente si svolge in due fasi e dura circa tre ore. Una cella al litio da 1.000 mAh
viene caricata nel primo stadio a un livello di circa 0,7 C (corrente di 700 mA); la tensione
sale rapidamente no a circa 4 V. Dopo circa 75 minuti la prima fase ha termine e la batteria
risulta carica al 70%. Nella seconda fase la tensione aumenta lentamente mentre la corrente
di carica aumenta in modo considerevole. Una batteria al litio risulta completamente carica
quando si raggiunge una tensione di circa 4,2 V oppure il livello di carica si stabilizza attorno
a 0,03 C (corrente di 30 mA); a questo punto la ricarica si può considerare conclusa.
56
3.8.4 Batterie
Nel nostro CubeSat dovranno essere presenti, come comunemente fatto nelle missioni spaziali,
due diversi sistemi energetici per due diversi scopi. I sistemi primari hanno solitamente
prestazioni migliori che i sistemi secondari, ma i sistemi primari non sono ricaricabili solitamente. Il sistema primario dovrà essere preferibilmente di grande capacità garantendo così,
in caso di assenza di alimentazione da parte dei pannelli solari, il corretto funzionamento
della radio principale per un minimo intervallo di tempo( un paio di sett). L'accumulatore
secondario dovrà essere principalmente in grado di essere caricato e scaricato varie volte, con
lo scopo di immagazzinare l'energia assorbita dalle celle solari nel tempo in cui codeste sono
esposte al sole, per poi garantire energia ai vari utilizzatori al momento che il nostro cubetto si
trova in ombra. Come da speciche del cubesat il peso totale del sistema non dovrà superare
1 kg e le batterie saranno uno di quegli elementi importanti che inuenzeranno questo fattore.
Dobbiamo quindi tenere in una buona considerazione di questo in quanto dobbiamo trovare il
giusto compromesso energia/peso.
I fattori piu importanti per quanto riguarda le caratteristiche delle batterie sono: un'alta
densità di energia/peso, un tempo di autoscarica lungo, la possibilità di una ricarica rapida.
Possiamo dire che tutti i tipi di accumulatori presi in considerazione permettono una ricarica
no a circa 1C, per quanto riguarda gli accumulatori al nichel abbiamo trovato anche possibilità di ricarica no a 5C, ma questo ne riduce sensibilmente la durata di vita ed in piu
dimensionando l'accumulatore per una capacità che permetta la sopravvivenza per un paio di
settimane non avremmo energia a sucienza per caricarla in questo modo.
Gli accumulatori al Litio sono caratterizzati da un buon rapporto energia per Kg ed in piu un
lungo tempo di autoscarica. In generale possiamo aermare che ha parita di capacità gli accumulatori al nichel pesano di piu rispetto agli accumulatori al Litio ed in piu quest'ultimi non
subiscono l'eetto memoria. La tabella di confronto delle tipologie di batterie fa notare con
evidenza che le batterie al Litio sono quelle che risultano piu indicate per il nostro progetto.
57
3.8.5 Confronto Batterie
Confronto tipologie batterie:
Figura 38: Confronto delle varie tipologie di batterie
58
3.9 Adabilità
3.9.1
Introduzione
Le considerazione che seguono sono state prese dal libro Reliability Engineering del Prof.Dr.Alessandro
Birolini e dal Web(www.wikipedia.com). Non avendo avuto alcuna formazione precedente sul
tema, ci siamo avventurati su questi argomenti con lo scopo di imparare qualcosa di nuovo
e di selezionare e mettere a fuoco concetti sicuramente importanti in vista delle decisioni da
prendere per la missione TIsat-1.
Denendo come qualità di un assieme o di un sistema comunque complesso la sua rispondenza ai criteri di specica di funzionamento, si denisce adabilità la capacità di rispettare le
speciche di funzionamento nel tempo. In sintesi, l'adabilità di un assieme (un apparato elettronico, una macchina, etc.), di un sistema comunque complesso o di un semplice componente
(ad esempio una resistenza elettrica) è la misura della probabilità che l'assieme considerato
(o il componente) non si guasti (ovvero non presenti deviazioni dal comportamento descritto
nella specica) in un determinato lasso di tempo.
Mortalità infantile e avarie:
Un componente può cessare di funzionare sostanzialmente per due motivi: era già difettoso in
origine oppure le sollecitazioni (cumulatesi durante la sua vita operativa) hanno raggiunto il
limite massimo per tale componente.
Figura 39: Esempio di bathtub curve
La probabilità di guasto sarà quindi dovuta alla combinazione di due curve:
• la probabilità di avaria per mortalità infantile (preponderante nella primissima fase di
vita operativa)
59
• la probabilità di avaria per sollecitazioni (che si cumula a partire dall'inizio della vita e
man mano diviene preponderante).
La curva che ne risulta è detta bathtub (vasca da bagno), che mostra una diminuzione iniziale
del numero di fallimenti nel tempo, un periodo di fallimenti costante nel tempo ed inne un
aumento del numero di fallimenti nell'unità di tempo.
3.9.2 Reliability
L'adabilità è una caratteristica di un dispositivo, espressa mediante la probabilità che questo
dispositivo possa funzionare come richiesto nel dato stato per un intervallo dichiarato di tempo. Anche denita caratteristica di un elemento ovvero l'attitudine dell'elemento stesso a
svolgere una funzione richiesta, in condizioni date, per un dato intervallo di tempo (ovvero è
la capacità dell'elemento a rimanere funzionante). Viene indicata principalmente con R. Da
un lato qualitativo si può dire che l'adabilità è l'abilità di un dispositivo di rimanere funzionante. Quantitavivamente è espressa dalla probabilità che l'elemento possa eseguire una
funzione richiesta in condizioni date per un dato intervallo di tempo (generalmente (0,t)).
Per aver senso lo studio sull'adabilità deve essere accompagnato dalle denizioni delle funzioni richieste, le condizioni di operazione e la durata della missione. È importante in generale
conoscere l'aspetto ambientale di dove si vuol utilizzare il dispositivo o sistema.
3.9.3 Failure
Il fallimento accade quando il dispositivo non eettua piu le funzioni richieste oppure anche
denito come terminazione dell'abilità del dispositivo di funzionare correttamente. Il guasto può venir classicato rispetto tre modalità: modo di guasto, causa del guasto, eetto del
guasto e meccanismi di guasto. Il modo quindi è il sintomo di come il guasto è accaduto per
esempio in corto, aperto e driftato.
La causa può essere intrinseca quindi per questioni di guasti iniziali o oppure estrinseca dovuta
a errori o sbagli durante il design di produzione. L'eetto di un fallimento può essere considerato e classicato diversamente attraverso:guasto non rilevante parziale, completo o critico.
Per quanto riguarda i meccanismi sono fallimenti sici, chimici o altri processi che risultano
in un fallimento.
60
Tabella indicativa del tipo di guasto dei componenti elettronici (%)
Figura 40: Failure
Un modo di guasto è il sintomo (eetto locale) che si osserva quando il guasto avviene. Tipici
modi di guasto sono opens, shorts, drift, guasti funzionali per componenti elettronici e per
componenti meccanici sono invece rottura, creep, spezzamento. Dei valori medi per la relativa
frequenza del modo di fallimento sono dati nella tabella sottostante.I valori dati in tabella
hanno scopo indicativo e devono essere completati tramite i risultati dalla propria esperienza
di prove di qualicazione, di dati del campo, o di analisi di guasto. i modi di guasto dierenti
di hardware, inuenzati spesso anche dall'applicazione specica, dalle dicoltà di causa nell'eetto di studio (conseguenza) di guasto e così nell'esecuzione concreta di ridondanza (serie
se corto, parallelo se aperto).
61
3.9.4 Failure Rate
IIl tasso di fallimento ha un ruolo importante per quanto riguarda l'adabilità di un sistema.
La failure rate è denita come velocità di danneggiamento dei prodotti dopo un determinato
tempo di utilizzo. Anche denita come guasto che si presenta in un intervallo specicato,
senza aver dato guasti prima del tempo t. Viene indicata generalmente con (λ).
I piu importanti parametri che inuenzano la failure rate di componenti elettronici:
Figura 41: Curve di carica
Come possiamo vedere dalla tabella i vari componenti sono inuenzati da diversi parametri che
si dierenziano tra dominanti (D) e importanti(x). I parametri a dipendenza del componente
possono essere o meno dominanti o importanti. Possiamo notare che temperatura ambientale
e di giunzione sono fra i fattori dominanti quelli che inuenzano di più il componente. Per
esempio un transistor bipolare ha come parametri dominanti la temperatura di giunzione e lo
stress di potenza e come parametri importanti la tecnologia il package le applicazioni mentre
una resistenza si distingue perché ha come parametri dominanti si la temperatura ambiente
che lo stress di potenza e come parametri importanti tecnologia, range, fattori ambientali e
fattori di qualità.
62
Da questo graco possiamo vedere la possibilità di carico e la derating curve in funzione della
temperatura ambiente.
Figura 42: Graco possibilità di carico e dearting curve in funzione della temperatura
A scopo indicativo la seguente tabella indica la failure rate di alcuni componenti elettronici
in operazione continua calcolati attraverso dierenti data base. Questi data base sono stati
presi da Inaltel reliability prediction, telcordia 2001 technologies prediction procedure e da
mil-hdbk predicition procedure.
Figura 43: Failure rate 2
Come possiamo osservare dalla tabella la failure rate cambia a dierenza dei data base presi
in considerazione.Comunque si può notare benissimo come tutte le memorie siano soggette ad
un più alto failure rate cosi come il Gate array e il processore Cmos mentre per resistenze,
diodi, condensatori e transistor il failure rate é molto vicino ad 1.
63
3.9.5 MTBF
Il mean time between failure (letteralmente: tempo medio fra i guasti), spesso abbreviato in
MTBF, è un parametro di qualità applicabile a dispositivi meccanici, elettrici ed elettronici e
ad applicazioni software. Il MTBF è il valore atteso del tempo tra un guasto ed il successivo;
la sua misura ha importanza in moltissimi ambiti:
ad esempio:
• la valutazione della vita media di un dispositivo elettronico, o di un componente meccanico, nell'ambito della progettazione
• la valutazione del tempo di attesa in coda di un semilavorato, se il guasto è riferito ad
una macchina utensile in un processo di produzione industriale
Per MTBF si intende la somma di due tempi: MTTF e MTTR.
In generale MTTF (acronimo di Mean Time To Failure) è denito come il valore atteso della
funzione di distribuzione statistica dei guasti.
Nel caso in cui la distribuzione dei guasti sia di tipo esponenziale come la variabile casuale
esponenziale negativa, ossia è caratterizzata da tasso di guasto costante nel tempo, allora in
termini matematici il MTTF è semplicemente il reciproco del tasso di guasto.
Analogamente MTTR (acronimo di Mean Time To Repair) è denito come il valore atteso
della funzione di distribuzione statistica delle durate la riparazione.
64
Si può confondere MTBF con MTTF solo quando il MTTR è trascurabile rispetto al MTTF.
Questa circostanza è riscontrabile solo in presenza di sistemi altamente adabili, quindi con
MTTF molto elevato, o di sistemi riparabili rapidamente.
3.9.6 Ridondanza
Il concetto di ridondanza è l'esistenza di più di una soluzione per l'eettuazione della funzione
richiesta in un dispositivo. La ridondanza non deve essere implementata come duplicazione
dell'hardware ma può essere pure eettuata a livello software. La ridondanza può essere
distinta attraverso alcuni punti di vista: activ, warm, standby.
• Active redundancy (parallel, hot) : gli elementi ridondanti sono sottoposti dall'inizio
allo stesso carico degli elementi di funzionamento. The failure rate nello stato di riserva
è lo stesso rispetto che nello stato di lavoro.
• Warm redundancy (lightly, loaded) : gli elementi ridondanti sono sottoposti a basso
carico no a che uno degli elementi operanti nel circuito non si guasta. The failure rate
nello stato di riserva è di meno rispetto che nello stato di lavoro.
• Standby redundancy (cold, not loaded) : gli elementi ridondanti non sono sotto carico
no a che uno degli elementi operanti nel circuito non si guasta. The failure rate nello
stato di riserva assume il valore zero.
Figura 44: Esempio tubazioni idrauliche
Nel esempio possiamo vedere un sistema idraulico che viene progettato in due diversi modi.
Da questo esempio possiamo capire per bene come funziona il sistema di ridondanza anche per
quello che riguarda i sistemi elettronici. Possiamo notare che nel caso a) l'ausso di acqua
attraverso le tubazioni è vincolato dal fatto che se una delle tre valvole è chiusa l'acqua non
scorre. Dal secondo caso possiamo notare che l'ausso non dà nessuna dicoltà in quanto
l'acqua scorre senza dicoltà anche se due valvole sono chiuse. Si ha sempre la possibilità che
l'acqua scorre in qualsiasi caso con l'eccezione di quando tutte le tre valvole sono chiuse. A
dipendenza delle valvole chiuse l'acqua passerà dalle tubazione libere.
65
3.9.7 Aspetto sistemistico
In pratica, ogni assieme (o sistema) è costituito da più sottoinsiemi che, da un punto di vista
dell'adabilità possono essere connessi in parallelo od in serie.Diciamo che tutti i sottoinsiemi
che, pur guastandosi, non pregiudicano la funzionalità dell'assieme superiore (che li contiene)
sono da un punto di vista dell'adabilità fra loro collegati in parallelo.
Viceversa, nel caso che sia suciente l'avaria di un singolo sottoassieme per determinare
l'avaria dell'assieme superiore, diremo che tale sottoassieme è connesso in serie.
Figura 45: Esempio di un sistema a blocchi
Nell'esempio sopra, è ragurato un sistema dove l'avaria di uno solo dei blocchi C o D non
porta all'avaria del sistema, mentre l'avaria del blocco A oppure B porta necessariamente
all'avaria del sistema.In altri termini, per mandare in avaria il sistema si dovrà avere l'avaria
contemporanea dei blocchi C-D, oppure l'avaria del blocco A oppure del blocco B. A prescindere dai modelli teorici, in pratica si rileva sul campo l'intervallo medio fra i fallimenti
(Mean Time Between Failure, MTBF), denito statisticamente come speranza matematica del
tempo di funzionamento fra due fallimenti.
In sistemi complessi, dove occorre garantire il funzionamento anche in presenza di avarie di
un sottosistema, si ricorre talvolta a ridondanze: questo corrisponde a porre più elementi in
parallelo che, quindi, avranno una adabilità equivalente più elevata del singolo elemento.
66
Figura 46: Diagramma dei blocchi base
In questa tabella possiamo vedere i diagrammi dei blocchi base di adabilità con le loro
associate funzioni di adabilità. Possiamo notare diversi blocchi il primo blocco 1 è un
singolo elemento, per quanto riguarda il blocco 2 vi sono degli elementi in una struttura messi
in serie. Il blocco 3, 4 sono dei blocchi con elementi in una struttura messi in parallelo. Dal
blocco 5 in avanti sono dei blocchi di sistemi in parallelo e in serie con il blocco 7, 8, 9 che
sono esempi con strutture complesse.
67
3.9.8 Esempio
Figura 47: Esempio blocco
Possiamo dire che dato il diagramma di blocco riusciamo a trovare e calcolare l'adabilità
del blocco grazie anche le speciche dei singoli componenti che forniscono l'MTBF. Infatti la
reliability function (Rs )si può calcolare con le formule dei blocchi base viste in precedenza
nella tabella.
Possiamo sapere che il singolo elemento R1 è denito dalla funzione:
Per i due elementi in parallelo se sono identici possono essere deniti nel modo seguente:
Da qui riusciamo ad estrarre la reliability function in funzione di λ .
Dunque avendo l'MTBF di ogni elemento possiamo ottenere il λ e risolvere la reliability function ottenuta sopra.
68
3.10 Sistema completo
3.10.1 Introduzione
Dopo aver trattato in precedenza varie situazioni, siamo arrivati alla soluzione nale.
Il circuito di alimentazione da noi pensato è riportato qui sotto, e commentato in ogni sua
parte nei sotto capitoli.
Figura 48: Circuito N◦ 1
Figura 49: Circuito N◦ 2
Questo è lo schema a blocchi completo del sistema d'alimentazione da noi pensato.In generale
si può notare la presenza di due circuiti isolati, e di due microprocessori dierenti. Questo
è stato pensato per un fatto di ridondanza. Nei capitoli precedenti abbiamo sviluppato il
sistema di alimentazione dal punto di vista di ricarica della batteria, ora vogliamo analizzare
i singoli blocchi del intero sistema.
69
3.10.2 Moduli solari
Per la scelta dei moduli solari siamo arrivati alla conclusione che la soluzione migliore è quella
di utilizzarne quattro composti da celle TJ 40x80 mm della ditta CESI di Milano, e due
composti da celle della ditta ticinese di Chiasso Solterra. Abbiamo deciso di collegare in
parallelo i pannelli posti su facce opposte, questo ci permette di avere sempre un modulo
illuminato ed uno in ombra. Quindi ci sarà un usso di corrente continuo per la ricarica delle
batterie. Sulla supercie esterna del satellite dovranno essere applicati anche i diodi Schottky
di sicurezza. In questa maniera riusciremo ad abbassare la loro tensione di giunzione a causa
della variazione di temperatura.
70
3.10.3 Batterie
Per la scelta delle batterie siamo giunti alla conclusione che per l'utilizzo dei pannelli Sj 20x40
mm CESI e per le celle Solterra la soluzione migliore è quella di utilizzare delle batterie Li-Io
per le caratteristiche tecniche che forniscono. La ditta Saft ore dei prodotti destinati al nostro
tipo di applicazione quindi con una certa esperienza nel campo spaziale. Saft ha sviluppato
cellule e batterie ampiamente riconosciute per il mercato spaziale usando la tecnologia ricaricabile litio-ione. Le batterie Litio-ione sono utilizzate in diverse applicazioni spaziali quali
satelliti GEO, MEO, il LEO e Microsatatelliti.
Potremmo cosi utilizzare le batterie fornite dalla Saft che sono batterie al litio-ione da 2500
mAh delle dimensioni di 14x43x50 mm da 68 g di massa, appositamente costruite per applicazioni spaziali. Nella gura sotto possiamo osservare le speciche tecniche del prodotto.
Figura 50: Batteria Saft
Per l'utilizzo dei pannelli solari TJ 40x80 CESI invece, la soluzione migliore è quella di utilizzare batterie al Nickel cadmio. Questo è dovuto al fatto che necessitiamo batterie con tensione
di carica inferiore ai 4 Volt.dato che la tensione nominale di una batteria Nickel cadmio è di 1.2
Volt, dovremo utilizzarne due in serie, in maniera tale da avere una tensione nominale di 2.4
Volt, con un tensione di ricarica attorno ai 3. Così facendo però bisogna inserire uno step/up
per riuscire ad alimentare un microprocessore che lavora ad una tensione piu alta rispetto
quella in uscita dalle batterie. Tutte le informazioni riguardanti questo tipo di batterie sono
disponibili negli allegati, al capitolo batterie. Nell'eventualità che fosse possibile inserire all'interno del satellite ulteriori batterie, la nostra scelta cadrebbe su batterie primarie, ad alta
71
capacità. Esistono infatti sul mercato delle batterie per applicazioni mediche e scientiche con
caratteristiche straordinarie, in grado di garantire un buon apporto di energia. Per quanto
riguarda la ditta Saft ha sul mercato delle batterie primarie ad alta ecienza ma hanno lo
svantaggio di avere un peso notevole.
72
3.10.4 Controllo batterie
Nello schema principale abbiamo riassunto il controllo della batteria con il simbolo seguente.
Figura 51: Simbolo controllo batteria
Ora analizzeremo la maniera in cui è realizzato il circuito di controllo della batteria.
Il controllo della batteria avviene tramite due circuiti, il primo è un circuito di sicurezza che
limita la tensione della batteria a quella nominale di carica, il secondo permette di stabilire
il livello di carica della batteria tramite degli appositi circuiti chiamati fuel gauge.Il controllo
della batteria avviene tramite un regolatore shunt di precisione.
Il circuito di protezione è il seguente:
Figura 52: Circuito di protezione
Il funzionamento di un regolatore shunt di precisione è molto semplice, infatti può essere considerato come quello di un transistor bipolare.
Praticamente avremo una caduta di tensione sulla R2 sempre costante, nel nostro caso 2.5
Volt.
Basterà quindi dimensionare la R1 per avere una caduta di tensione data dalla formula
seguente:
73
Dimensionando correttamente i componenti non avremo quindi nessun problema di sovra
tensioni ai capi della batteria, perché la tensione di carica sarà data dal nostro regolatore.
I diodi sono disposti in questa maniera per un fattore puramente legato alla ridondanza, e
sono quattro diodi Schottky. Questo per avere una caduta di tensione più bassa possibile.
Per stabilire il livello di carica della batteria, e altri parametri, utilizziamo un integrato in
grado di passare le informazioni volute al microprocessore. Questo integrato è detto Fuel
gauge, ora analizzeremo meglio il suo funzionamento.
Figura 53: Fuel Gauge
Il principio sul funzionamento di questo circuito è essenzialmente quello di controllare il usso
di corrente in entrata nella batteria, e paragonarlo con quello in uscita. In questo modo
sapremo sempre il livello di carica preciso.
74
3.10.5 Microprocessore
La scelta del microprocessore cade necessariamente sulla famiglia ultra low power, in quanto
permettono un risparmio energetico non indierente rispetto agli altri microprocessori.
La scelta di utilizzare due microprocessori è legata unicamente al fatto di avere un minimo di
ridondanza, sarebbe infatti poco plausibile eettuare studi di adabilità, ed utilizzare un solo
microprocessore.
Lo scopo del microprocessore è quello di gestire varie informazioni, qui di seguito riportiamo
quelle principali:
• Controllo delle batterie
• Gestione del sistema di alimentazione
• Gestione del sistema di comunicazione
Il microprocessore che potrebbe essere utilizzato per questi scopi è il modello msp430. Già
testato per quel che riguarda il sistema di comunicazione. oviamente non è l'unico modello
utilizzabile, sono infatti molti i microprocessori della famiglia ultra low power sul mercato.
Il principio di funzionamento dei microprocessori è quello di controllare il livello di carica
delle batterie, ed in base a questo, di scegliere quale batteria utilizzare per l'alimentazione del
circuito.
In pratica con la batteria maggiormente carica alimentiamo il sistema, mentre le altre vengono
staccate, per potersi ricaricare. Per realizzare questo tipo di controllo saranno sucienti degli
interruttori controllabili dal microprocessore.
Il microprocessore viene alimentato direttamente dalle batterie nel caso del circuito 1 visto in
precedenza, infatti l'utilizzo di batterie da 3.7 Volt ci permette di utilizzarle direttamente tale
tensione,senza l'introduzione di regolatori. Questo ci permette di avere un circuito di conversione in meno, e quindi di risparmiare sia in termini di energia, sia in termini di adabilità.
Per quel che riguarda il circuito 2 dobbiamo tenere in considerazione di utilizzare uno step/up
per alimentare il processore, in quanto le batterie al Ni-Cd ci forniscono una tensione di 2,4
Volt.
75
3.10.6 Convertitore di tensione
Per la conversione dell'energia proveniente dalle batterie abbiamo pensato di utilizzare un
metodo con un buon rendimento. L'idea è quella di utilizzare dei charge pump. Dal momento
che la potenza assorbita dal sistema di telecomunicazione è di circa 2 watt, e avremo una
corrente abbastanza elevata(circa 200 mA), non sarà possibile utilizzare i normali charge
pump integrati. La realizzazione di un circuito charge pump non è complicata, ma bisognerà
prestare molta attenzione nella scelta dei componenti. Infatti i transistor CMOS non sono
indicati per applicazioni spaziali, a causa delle loro caratteristiche. Bisognerà quindi cercare
transistor CMOS speciali, o charge pump dedicati ad un funzionamento anti latch, con correnti
sucienti per il nostro sistema. Un'alternativa al sistema charge pump è quella di utilizzare
convertitori di tensione switching. Il funzionamento dei convertitori dc/dc switching è già
stato trattato nel capitolo 3.3. La cosa a cui prestare attenzione, è la selezione del modello,
infatti dovremo sceglierne uno che sia soddisfacente sia dal punto di vista del rendimento, sia
dal punto di vista della potenza in grado di erogare. Come per i microprocessori, anche in
questo caso ci sono una moltitudine di modelli diversi, di molte aziende dierenti. Riportiamo
qui di seguito il principio di funzionamento di uno di questi integrati.
Figura 54: Step-up Maxim
La gura 47 riporta il modo in cui possono venir utilizzati i convertitori dc/dc integrati. In
questo caso abbiamo il modello MAX771 in grado di fornire una tensione di uscita regolabile,
no ad un massimo di 15.5 Volt, partendo da una tensione di ingresso minima di 2 Volt. Oltre
alle tensioni e ai rendimenti bisogna considerare le temperature sopportabili dai circuiti, in
questo caso avremo un range di utilizzo che varia da -40◦ C a + 85◦ C. Prima di poter scegliere
il modello migliore di converitore sarà necessario eseguire dei test pratici, per assicurarsi che
i dati dichiarati dai vari datasheet siano reali.
76
3.10.7 Peso del sistema completo
Abbiamo calcolato nei capitoli riguardanti i moduli solari il peso dei vari pannelli, nel capitolo
delle batterie abbiamo visto i vari pesi in gioco,e in questo capitolo riassumiamo il peso totale
che sarà da destinare al sistema di alimentazione. Per implementare l'intero sistema necessitiamo di 4 pannelli solari CESI TJ 40x80 mm e 2 Solterra SJ da 20x20 mm. Abbiamo detto
che utilizzeremo 2 batterie Ni-cd e una Li-io, quindi il peso totale dovrebbe essere stimato
attorno agli 800 grammi. Infatti il peso dei vari componenti è il seguente:
• 4 pannelli CESI: 172 g.
• 2 pannelli Solterra: 108 g.
• 2 batterie Ni-cd: 240 g.
• 1 batteria Li-io: 68 g.
• Print + cablaggi: 70 g.
• Componenti vari: 50 g.
• Peso totale: 708 g.
Questo valore è troppo elevato, quindi devono essere apportate delle modiche all'idea di base.
Si potrebbero utilizzare delle batterie Ni-cd con capacità inferiori. Questo porterebbe ad un
risparmio in termini di peso di 140 g. L'ideale sarebbe trovare delle batterie al Li-io con una
tensione di ricarica di 3.7 Volt massimi. Questo ci permetterebbe di utilizzare i pannelli CESI
TJ 40x80 mm sfruttando il massimo della potenza, risparmiando circa 150 grammi. Oppure un
altra soluzione sarebbe utilizzare i moduli solari CESI 20x40 mm in maniera da poter utilizzare
comuni batterie Li-io da 3.7 Volt. Anche questa operazione ci farebbe risparmiare circa 150
grammi. Quindi il peso totale del sistema di alimentazione dovrebbe aggirarsi attorno ai 550
grammi. Il peso calcolato è stato calcolato in maniera tale da avere un margine di sicurezza,
quindi il valore reale dovrebbe essere un pò inferiore.
77
4 CONCLUSIONI
Siamo molto soddisfatti di come si è svolto questo lavoro, anche se purtroppo non siamo
riusciti a toccare con mano il frutto dei nostri studi sulle varie tecnologie.
Crediamo che l'insegnamento più importante che ci ha lasciato questo lavoro, oltre a tutte
le conoscenze apprese, sia quello del sapere lavorare in maniera aatata all'interno di un
team. Infatti i rapporti di lavoro con i nostri colleghi, soprattutto quelli del gruppo assegnato
allo sviluppo del sistema di comunicazione, Mattia Croci e Matteo Weber sono stati ottimi.
Non sono mancati infatti gli incontri extrascolastici per pensare assieme nuove idee e nuove
soluzioni per il progetto Cubesat. Ottimi sono stati anche i rapporti con tutto l'ambiente
del SSL(SUPSI Space Lab). Abbiamo sempre trovato qualcuno disponibile ad ascoltarci e ad
aiutarci, con grande cortesia e professionalità.
Lavorare su un progetto legato allo spazio è stato molto aascinante. In principio pensavamo
che molte cose fossero banali, ma col passare del tempo ci siamo accorti di quanto è complicato
tradurre le situazioni che troviamo nell'ambiente terrestre a quelle che potremmo trovare al
di fuori dell'atmosfera.
Questo progetto ci ha permesso di conoscere nuove persone, e guardare quello che fanno nelle
altre università sparse per il mondo. Abbiamo avuto modo di parlare con ingegneri di vari
campi legati all'elettronica, e ci siamo sentiti più vicini al mondo del lavoro.
Speriamo che il nostro lavoro torni utile ai gruppi che aronteranno in futuro questo progetto.
Abbiamo cercato di trattare i temi più importanti legati al sistema di alimentazione, alcuni in
maniera approfondita e altri un po' più supercialmente. Le soluzioni che abbiamo scelto sono
legate a scelte personali. Noi abbiamo scelto la strada dell'adabilità, ma non è detto che chi
arriverà dopo abbia le stesse idee, pensiamo quindi di aver fatto un buon lavoro riportando
tutto il materiale che abbiamo trattato. Questa documentazione non vuole essere una guida o
un modello di lavoro, ma soltanto un utile strumento per capire in breve tempo cosa sta dietro
alla tecnologia fotovoltaica, alle batterie, e a tutte le tecniche legate ai sistemi di alimentazione.
78
PIANO DI LAVORO
79
BIBLIOGRAFIA
Reliability Engineering Theory and Pratice fourth edition, A.Birolini, Springer
Quality and reliability of technical systems, Theory - Pratice - Management,
A.Birolini, Springer-Verlag
80