COMBIVERT
D
GB
F
I
E
00.F4.C0B-K110
RU
STOP
BETRIEBSANLEITUNG
INSTRUCTION MANUAL
MANUEL D'INSTRUCTION
MANUALE DI ISTRUZIONE
MANUAL DE INSTRUCCIONES
РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ
Steuerteil
Control circuit
Carte de commande
Circuito di controllo
Circuito de control
Карта управления
1
Erst Betriebsanleitung Teil
Read Instruction manual part
Lisez d'abord le manuel d'instructions partie
Prima leggere le manuale di istruzione parte
Leer manual de instrucciones parte
Сначала прочти инструкцию часть
lesen!
before!
!
!
antes!
!
02/2004
D
Steuerteil
Seite 4 ................... 23
D
Control circuit
Page 24 ................ 43
GB
F
Carte de commande
Page 44 ................ 63
F
I
Circuito di controllo
Page 64 ................ 83
I
E
Circuito de control
Page 84 .............. 103
E
RU
Карта управления
Страница 104 ... 123
RU
Passwords
Page 129
GB
3
Questo manuale d’ istruzione descrive la serie standard COMBIVERT F4-S(piccolo) e F4-C(compatto).
Questo Manuale di Istruzione deve essere accessibile all'utilizzatore. Prima di escguire qualsiasi lavoro
sull'unità l'utente deve familiarizzare con l'apparecchiatura. Questo comprende, specialmente, la
conoscenza e le osservanze delle direttive di sicurezza e di avvertimento sootoindicate. I simboli usati
in questo Manuale di Instruzione hanno il seguente significato:
Avvertimento
Pericolo
Cautela
Attenzione,
osservare
assolutamente
F
Informazione
Aiuto
Suggerimento
Attenzione
Solo personale
elettrico-specializzato
Pericolo
Attenzione al tempo di
scarica dei condensatori
64
Utilizzato quando la vita o la salute dell' utente sono esposte
a pericolo oppure quando si possono verificare gravi danni
all'apparecchiatura.
Istruzioni speciali per un funzionamento sicuro e senza
problemi
dell'azionamento.
Utilizzato
per
sottolineare
importanti
informazioni
supplementari.
Il KEB COMBIVERT opera con alta tensione e venendo a contatto
con esso, può verificarsi uno shock elettrico estremamente
pericoloso. L’ installazione dell’ unità deve essere effettuata soltanto
da personale tecnico qualificato. La sicurezza ed il funzionamento
senza problemi dell’ azionamento è possibile solo nel rispetto sia
delle norme DIN VDE 0100, IEC1000, EN 60204-1, EN 55014, EN
50082-2 sia delle regolamentazioni relative alla Vostra area.
Spegnendo l’ inverter i condensatori del circuito intermedio
rimangono carichi per un breve periodo. Per questo è assolutamente
necessario attendere circa 5 minuti prima di poter operare sull’
apparecchiatura.
Contenuti
Contenuti
1.
1.1
1.1.1
1.1.2
1.1.3
1.1.4
1.1.5
1.2
1.2.1
1.2.2
1.2.3
1.2.4
1.2.5
2.
2.1
2.1.1
2.1.2
2.2
2.3
2.4
2.5
2.6
2.7
2.7.1
2.7.2
2.7.3
2.7.4
Installazione e collegamento ...................... 66
Circuito di controllo - Versione C ........................ 66
Descrizione della morsettiera X1 ............................ 66
Collegamento del controllo ..................................... 67
Ingressi digitali ........................................................ 67
Ingressi analogici .................................................... 67
Uscite ..................................................................... 67
Circuito di controllo - Versione S ........................ 68
Descrizione della morsettiera X1 ............................ 68
Connessione del controllo ...................................... 68
Ingressi digitali ........................................................ 68
Ingressi analogici .................................................... 68
Uscite ..................................................................... 69
Operazioni della'unità ................................. 69
Operatore di digital .............................................. 69
Operatore con interfaccia ....................................... 69
Tastiera ................................................................... 70
Sommario parametri ............................................ 71
Inserimento Password ......................................... 71
Funzionamento Display ....................................... 72
Regolazioni di base del motore........................... 73
Regolazioni Speciali ............................................. 74
Il modo Drive ......................................................... 81
Start / Stop Drive .................................................... 81
Cambio della direzione di rotazione ....................... 81
Preselezionare il valore impostato.......................... 81
Lasciare il modo drive ............................................ 81
3.
Diagnostica errori ........................................ 82
4.
Passwords .................................................. 129
65
I
1. Installazione e collegamento
1.1 Circuito di controllo
Versione C
1.1.1 Descrizione della
morsettiera X1
1
I
2
3
1
2
3
4
20 21 22 23
5
6
7
8
9 10 11 12 13 14 15 16 17 18 19
4
5
6
7
8
9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
PIN
Funzione
Nome Descrizione
X1.1
X1.2
X1.3
Contatto NO
Contatto NC
Contatto comune
RLA
RLB
RLC
Uscita relè
Per la funzione vedere parametro CP.22
(taratura di fabbrica : indicazione errore)
X1.4
X1.5
Frequenza fissa 1
Frequenza fissa 2
I1
I2
X1.4 + X1.5 = frequenza fissa 3
nessun ingresso = riferimento analogico
X1.6
DC-braking
I3
attiva il dc-braking
X1.7
Funz. Risp. Energia I4
X1.8
X1.9
+Tensione differenziale REF+ La tensione differenziale è sommata o
-Tensione differenziale REF- sottratta all’ ingresso REF (X1.17)
Output voltage is reduced to 70%
X1.10 Oraria
X1.11 Antioraria
F
R
Rotazione preimpostata; oraria ha priorità
X1.12 Dipende dalla
OUT1 L’ uscita transistor commuta quando fattuale frequenza=f impostata
X1.13 Massa
X1.14 15V
0V
Uext
X1.15 Uscita analogica
AOUT Uscita analogica proporzionale alla freq. attuale 0..10VDC=0..100Hz
Potenziale per ingressi/uscite digitali
alimentazione per uscite digitali/analogiche (max.100mA)
X1.16 +10V
CRF
X1.17 Riferim. ingr. analogico REF
X1.18 Comune
Alimentazione per potenziometro (max. 4mA)
Impostazione fabbrica 0...10V (0...20mA e 4...20mA regolabile
con CP.24)
COM Massa per ingressi e uscite analogiche
X1.19 Abilitazione motore
ST
Moduli di potenza sono attivi
X1.20 Reset
RST
Hardware reset; possibile solo quando interviene un errore
X1.21 Contatto NO
FLA
X1.22 Contatto NC
FLB
X1.23 Contatto in scambio FLC
66
Relè di uscita; commuta, quando livello
impostato in CP.23 è raggiunto
(commutazione dipendente dalla frequenza)
Installazione e collegamento
1.1.2 Collegamento del
controllo
Al fine di evitare un malfunzionamento causato dalle interferenze della tensione
di alimentazione sugli ingressi di controllo, osservare i seguenti punti:
- Utilizzare cavi schermati/intrecciati
- Collegare la schermatura al lato inverter sul terminale di terra PE
- Cablare i cavi di potenza e di controllo separati (circa 10...20 cm)
- (Qualora non fosse possibile) disporre i cavi ad angolo retto
EMC
Alimentazione interna
4
1.1.3 Ingressi digitali
5
6
7
10 11
13 14
19 20
PE
Alimentazione esterna
4
5
6
7
10 11
13 14
19 20
PE
+
13...30VDC
riferimento analogico
(vedere CP.24)
1.1.4 Ingressi analogici
16 17 18
Connettere gli ingressi
analogici non usati al comune,
per prevenire fluttuazioni del
valore impostato!
I
riferimento analogico
PE
8
9
18
PE
R = 3...10 kΩ
+
+
0...10 VDC
Ri = 56 kΩ
+ SPS
0...±10 DCV
Ri = 40 kΩ
0(4)...20 mADC
Ri = 250 Ω
1.1.5 Uscite
+15V
Al fine di evitare errori
utilizzando l’alimentazione
esterna, l’alimentazione
esterna deve essere
attivata prima dell’
accensione inverter.
250V AC / 0,2 mA
30V
DC/0,01...1A
30V
DC / 1 A
250V AC / 0,2 mA
30V
DC/0,01...1A
30V
DC / 1 A
1
2
3
12 13 14 15
18
21 22 23
PE
+
+
Uscita analogica:
0...10VDC /max. 5mA
con Ri < 100 Ω
Tensione esterna
16...30VDC
67
Installazione e collegamento
1.2 Circuito di controllo
Versione S
1
2
3
4
5
6
7
8
9 10 11 12 13 14
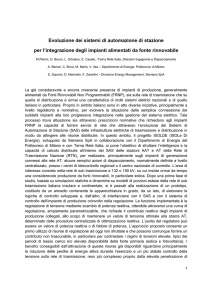
1.2.1 Descrizione della
morsettiera X1
PIN
Function
Nome Description
X1.1
X1.2
X1.3
contatto NO
contatto NC
Comune
RLA uscita relè
RLB per la funzione vedere parametro CP.22
RLC (taratura di fabbrica: indicazione errore)
X1.4
X1.5
Frequenza fissa 1
Frequenza fissa 2
I1
I2
X1.4 + X1.5 = Frequenza fissa 3
no ingresso = valore analogico regolabile
X1.6
Massa
0V
per ingressi/uscite digitali
X1.7 +10V
CRF Tensione di riferimento per potenziometro (max. 4mA)
X1.8 Riferimento ingresso REF analogico 0...10VDC
X1.9 Comune
COM Massa per ingressi/uscite analogiche
I
X1.10 Uscita analogica
AOUT Uscita analogica proporzionale alla freq. attuale 0...10VDC = 0...100Hz
X1.11 15V
Uext
Tensione alimentazione per ingressi/uscite digitali (max.100mA)
X1.12 Antiorario
X1.13 Orario
R
F
Selezione rotazione; rotazione oraria prioritaria
X1.14 Rilascio motore
ST/ I moduli di potenza sono pilotati;
RST aprendo si interrompe la modulazione
1.2.2 Connessione del
controllo
Per prevenire malfunzionamenti sugli ingressi della morsettiera di controllo
causati da disturbi seguire le seguenti istruzioni:
- Utilizzare cavi schermati/intrecciati
- Collegare la schermatura al lato inverter sul terminale di terra PE
- Cablare i cavi di potenza e di controllo separati (circa 10...20 cm)
EMC
- (Qualora non fosse possibile) disporre i cavi ad angolo retto
1.2.3 Ingressi digitali
4
Tensione interna
5
11 12 13 14
PE
Tensione esterna
4 5 6
12 13 14
PE
+
13...30VDC
1.2.4 Ingressi analogici
Regolazione segnale analogico
7
8
9
PE
R = 3...10 kΩ
68
Selezione tramite tensione esterna
8
9
+ SPS
PE
0...10 DCV
Ri = 56 kΩ
Utilizzo dell’unità
1.2.5 Uscite
1
2
3
30V DC / 0,01...1A
2. Operazioni
della'unità
2.1 Operatore di digital
No.art.: 00.F4.010-2009
PE
9 10
+
uscita analogica:
0...10VDC con
Ri ≥ 56 KΩ const.
L’ operatore è una opzione ed è utilizzato per operazioni locali. Per
prevenire malfunzionamenti, l’inverter deve essere portato in stato di
nOP prima di collegare/scollegare l’operatore (terminale ST X1.19 aperto
Versione-C/X1.14 Versione-S). Avviando l’inverter senza l’operatore,
lo stesso parte secondo le impostazioni di fabbrica. Vi sono 2 versioni di
operatore:
5 Display a LED
Interfaccia di controllo
"LED send lampeggia”
Display operativo/errore
"LED normale on”
"LED errore lampeggia”
Doppia funzione tastiera
2.1.1 Operatore con
interfaccia
No.art.: 00.F4.010-1009
5 4 3 2 1
9 8 7 6
Nell’interfaccia operatore opzionalmente è integrata una seriale a
potenziale separato RS232/RS485.
Connettore
di terra
PIN No.
1
2
3
4
5
6
7’
8
9
Segnale
TxD
RxD
RxD-A
RxD-B
VP
DGND
TxD-A
TxD-B
RS232/RS485
Significato
riservato
Segnale di trasmissione/RS232
Segnale di ricezione/RS232
Segnale di ricezione A/RS485
Segnale di ricezione B/RS485
Alimentazione +5V (Imax = 10 mA))
Potenziale di riferimento dati
Segnale di trasmissione A/RS485
Segnale di trasmissione B/RS485
69
I
Utilizzo dell’unità
2.1.2 Tastiera
Quando si alimenta il KEB COMBIVERT appare il valore del parametro
CP.1. (Vedere Drivemode per verificare la funzione della tastiera)
Il tasto function (FUNC)
cambia tra il valore del
parametro e il numero del
parametro.
Con UP e DOWN si
incrementa e decre-menta
il numero del parametro e
il valore del parametro.
FUNC.
SPEED
STOP
STOP
START
START
Il cambiamento dei valori dei parametri è immediatamente accettato e
memorizzato in una memoria non volatile. Per alcuni parametri il valore
impostato non è accettato subito. Quando si effettua la variazione appare
un puntino accanto all’ultima cifra del display.
I
Premendo il tasto ENTER
il valore impostato è
memorizzato in una
memoria non volatile.
ENTER
F/R
Se durante l’operazione capita un errore il display visualizza il tipo di
errore intercorso. La visualizzazione di errore si resetta con ENTER.
errore
ENTER
F/R
Con ENTER il messaggio di errore è soltanto resettato, ma non
eliminato. Allo scopo di eliminare l’errore deve essere rimossa
la causa ed effetuare un reset con il terminale X1.20 (VersioneC) / X1.14 (Versione-S) oppure un spegnendo e riaccendendo
l’azionamento.
70
Utilizzo dell’unità
2.2 Sommario parametri
Regolazioni Parametro
CP. 0
Inserimento password
CP. 1
Frequenza attuale
CP. 2
Stato inverter
CP. 3
Carico attuale
CP. 4
Picco di carico
CP. 5
Impostazione frequenza
CP. 6
Boost
CP. 7
Tempo di accelerazione
CP. 8
Tempo di decelerazione
CP. 9
Frequenza minima
CP.10
Frequenza massima
CP.11
Frequenza fissa 1
CP.12
Frequenza fissa 2
CP.13
Frequenza fissa 3
CP.14
Corrente max. in rampa
CP.15
Corrente max. costante
CP.16
Speed search
CP.17
Stabilizzazione tensione
CP.18
Slip compensation
CP.19
Autoboost
CP.20
DC-braking
CP.21
Tempo di DC-Braking
CP.22
Uscita relè
CP.23
Segnale di frequenza
CP.24
Regolazione segnale (soltanto Vers.C)
Regolaz.range
0...9999
0...409.58 Hz
0...25.5 %
0.01...300 s
0.01...300 s
0...409.58 Hz
0...409.58 Hz
0...±409.58 Hz
0...±409.58 Hz
0...±409.58 Hz
10...200 %
10...200 %
0...15
150...649 V,off
-2.50...2.50
-2.50...2.50
0...9
0...100 s
0...xx
0...409.58 Hz
0...2
Risoluzione
1
0,1 Hz
1%
1%
0.0125 Hz
0.1 %
0.01 s
0.01 s
0.0125 Hz
0.0125 Hz
0.0125 Hz
0.0125 Hz
0.0125 Hz
1%
1%
1
1V
0.01
0.01
1
0.01 s
1
0.0125 Hz
1
Standard
50.0 Hz
2%
10 s
10 s
0 Hz
70 Hz
5 Hz
50 Hz
70 Hz
140 %
200 %
8
off
0
0
7 (0) 1)
10 s
2
4 Hz
0
I
2.3 Inserimento Password Il convertitore di frequenza non presenta una password di protezione,
con questo si intende che tutti i parametri sono regolabili. Dopo la
parametrizzazione l’unita può essere negata da un accesso non
autorizzato. La regolazione mode è memorizzata.
Password
Protezione Parametri-CP
ENTER
UP
FUNC
Rilascio Parametri-CP
Password
ENTER
UP
FUNC
71
Utilizzo dell’unità
2.4 Funzionamento
Display
I 4 parametri sotto servono per controllare il convertitore di frequenza
durante il funzionamento.
Visualizzazione frequenza
attuale
Visualizzazione della attuale frequenza in uscita con una risoluzione di
0.0125 Hz. La direzione di rotazione è visualizzata tramite il segno.
Frequenza in uscita 18.3 Hz,rotazione oraria
Esempi:
Frequenza in uscita 18.3 Hz, rotazione antioraria
Visualizzazione stato inverter
Il parametro Stato inverter visualizza la condizione operativa dell’inverter.
Le possibili visualizzazioni e loro significato sono:
no Operation rilascio motore (terminal X1.19) contatto
aperto, modulazione spenta, tensione in uscita = 0 V, il
motore non è controllato.
Low Speed direz. rotaz non selezionata (terminale X1.10
oppure X1.11), modulazione spenta, tensione in uscita = 0
V, il motore non è controllato.
Accelerazione oraria il motore accelera con una direzione
di rotazione oraria.
Decelerazione oraria il motore decelera con una direzione
di rotazione oraria.
I
Accelerazione antioraria il motore accelera con una
direzione di rotazione antioraria.
Decelerazione antioraria il motore decelera con una
direzione di rotazione antioraria.
Velocià oraria costante il motore lavora con una velocità
costante e direzione di rotazione oraria.
Velocità antioraria costante il motore lavora con una velocità
costante e direzione di rotazione antioraria.
Ulteriori messaggi di stato sono descritti attraverso i parametri, con il
loro significato. Messaggi di errore e loro cause sono descritti nel
Capitolo 3.
Carico attuale in uscita
La visualizzazione del carico attuale in uscita è in percentuale. 100%
di carico equivale alla corrente nominale dell’inverter. Possono essere
visualizzati solo valori positivi, intendendo che non esiste differenza
tra funzionamento normale e funzionamento rigenerativo del motore.
Picco di carico in uscita
Permette di visualizzare i picchi di corrente, memorizzando il valore
più alto. Il valore letto è in percentuale (100% = corrente nominale
dell’inverter).
Con i tasti UP/DOWN il picco memorizzato può essere
resettato quando l’unità è funzionante. Questa operazione
permette di misurare il valore più alto di carico in determinate
fasi operative. Spegnendo l’unità il valore viene cancellato.
72
Utilizzo dell’unità
2.5 Regolazioni di base
del motore
Frequenza nominale
I seguenti parametri determinano i dati fondamentali operativi del motore.
Devono essere controllati e/o adattati per l’applicazione.
Con questo parametro si imposta il rapporto V/HZ.
Campo di regolazione: 0...409.50 Hz
Risoluzione:
0.0125 Hz
Regolazione standard:
50.0 Hz
Regolazione cliente:
_______ Hz
Boost
UA
100%
CP. 5
f
CP. 5
f
Alle basse velocità più gran parte della tensione sul motore viene
assorbita dalla resistenza statorica. Al fine di mantenere costante la
coppia massima del motore in tutto il campo di variazione della velocità,
è possibile compensare con il boost la diminuzione della tensione.
Campo di regolazione:
Risoluzione:
Regolazione standard:
Regolazione cliente:
Regolazione:
0...25.5 %
0.1 %
2.0 %
_______ %
UA
CP. 6
I
- Determinare la corrente in uscita senza carico durante
il funzionamento a frequenza nominale.
- Impostare circa 10 Hz e regolare il boost, in maniera tale da
visualizzare la stessa corrente letta alla frequenza nominale.
Quando il motore lavora a basse velocità e con una tensione
troppo alta per periodi lunghi si può creare un surriscaldamento
al motore.
Tempo di accelerazione
Il parametro determina il tempo necessario per accelerare da 0 a 100 Hz.
Il tempo di accelerazione è proporzionale alla variazione della frequenza.
delta f
100 Hz
x CP. 7 = tempo di accelerazione attuale
Campo di regolazione:
Risoluzione:
Regolazione standard:
Regolazione cliente:
0.01...300 s
0.01 s
10 s
_______ s
f
100 Hz
CP. 7
t
Esempio: CP. 7 = 10 s ; se il motore dovesse accelerare da 10 Hz a 60 Hz
delta f = 60 Hz - 10 Hz = 50 Hz
tempo di accelerazione attuale = (50 Hz / 100 Hz) x 10s = 5 s
73
Utilizzo dell’unità
Tempo di decelerazione
Il parametro determina il tempo necessario per decelerare da 100 a 0 Hz.
Il tempo di decelerazione è proporzionale alla variazione della frequenza.
delta f
x CP. 8 = tempo di decelerazione attuale
100 Hz
f
Campo di regolazione:
Risoluzione:
Regolazione standard:
Regolazione cliente:
0.01...300 s
0.01 s
10 s
_______ s
100 Hz
CP. 8
t
Esempio: CP. 8 = 10 s ; se il motore dovesse decelerare da 60 Hz a 10 Hz
delta f = 60 Hz - 10 Hz = 50 Hz
tempo di decelerazione attuale = (50 Hz / 100 Hz) x 10s = 5 s
Frequenza minima di lavoro dell’inverter senza impostazione del segnale
analogico. Limitazione interna delle frequenze fisse CP.11...CP.13.
Frequenza minima
Campo di regolazione: 0.0...409.58 Hz
Risoluzione:
0.0125 Hz
Regolazione standard:
0.0 Hz
Regolazione cliente:
_______ Hz
I
f
CP.10
CP. 9
0V
10 V
UREF
Frequenza massima di lavoro dell’inverter con il segnale analogico max.
Limitazione interna delle frequenze fisse CP.11...CP.13.
Frequenza massima
Campo di regolazione: 0.0...409.58 Hz
Risoluzione:
0.0125 Hz
Regolazione standard:
70 Hz
Regolazione cliente:
_______ Hz
Frequenza fisse 1...3
I1
I2
I1+I2
Posono essere regolate 3 frequenze fisse. La selezione delle frequenze
fisse avviene tramite gli ingressi I1 e I2 (terminali X1.4 e X1.5).
Campo di regolazione: 0.0...±409.58 Hz
Risoluzione:
0.0125 Hz
Regolazione standard:
5/50/70 Hz
Regolazione cliente 1:
_______ Hz
Regolazione cliente 2:
_______ Hz
Regolazione cliente 3:
_______ Hz
Se la preselezione capita fuori dai limiti fissi impostati in CP.9 e CP.10,
la frequenza viene limitata internamente.
74
Utilizzo dell’unità
2.6 Regolazioni
Speciali
Corrente max. in rampa
I seguenti parametri servono per ottimizzare l'impiego del motore e/o
adattarlo a determinate applicazioni. Queste regolazioni possono essere
ignorate in un primo tempo.
Questa funzione protegge il convertitore di frequenza da sovracorrenti
durante la rampa di accelerazione e/o la rampa di decelerazione.
Quando si raggiunge il valore impostato la rampa si blocca fino a quando
il valore di corrente non diminuisce.
Campo di regolazione: 10...200 %, 200%=off
10...200%, >150%=off
Risoluzione:
1%
Regolazione
140 %
Regolazione cliente:
_______ %
Corrente max. costante
taglie D
da taglia E
Questa funzione protegge il convertitore di frequenza da sovracorrenti
durante il funzionamento a frequenza costante. Quando si supera il
valore impostato la frequenza in uscita si riduce fino a quando il valore di
corrente non diminuisce.
Campo di regolazione:10...200 %,200%=oFF
10...200%, >150%=oFF
Risoluzione:
1%
Regolazione standard:
200 %
Regolazione cliente:
_______ %
I
taglie D
da taglia E
CP.14
CP.15
t
on
off
on
off
fimpostata
LAD-stop
t
limite di corrente
t
freale
t
75
Utilizzo dell’unità
Speed search
Avviando l’inverter mentre il motore decelera per inerzia, si può verificare
un intervento protettivo causato dalle differenti frequenze dei campi
rotanti. Attivando la funzione di speed search l’inverter cerca la frequenza
attuale del motore, vi adatta la propria frequenza in uscita e accelera, con
la rampa di accelerazione programmata, alla frequenza impostata. Il
parametro determina le condizioni di attivazione della funzione. Attivando
più condizioni bisogna immettere la somma.
Campo di regolazione:
0...15
Risoluzione:
1
Impostazione di fabbrica:
8
Impostazione del cliente: _______
Stabilizzazione di tensione
I
Valore
0
1
2
4
8
della condizione
funzione off
dopo il rilascio del motore
dopo alimentazione
dopo un reset
dopo Auto-Reset UP
Questo parametro consente di impostare una tensione in uscita regolata
in relazione alla frequenza nominale. La variazioni di tensione all’ingresso
così come nel circuito intermedio, hanno solo una piccola influenza sulla
tensione in uscita (caratteristica V/Hz). La funzione, tra le altre cose,
consente di adattare la tensione in uscita a motori speciali. Nell’esempio
sotto riportato la tensione in uscita è stabilizzata a 230V (boost 0%).
Campo di regolazione: 150...649 V, oFF
Risoluzione:
1V
Impostazione di fabbrica:
oFF
Impostazione del cliente:
_______ V
UN/UA
250 V
CP.17 = 230 V
190 V
UA a UN = 250V non stabilizzata
UA a UN = 250V stabilizzata
UA a UN = 190V stabilizzata
UA a UN = 190V non stabilizzata
UN = tensione di alimentazione
UA= tensione in uscita
CP.5 = 50 Hz
76
f
Utilizzo dell’unità
Compensazione di
scorrimento
La compensazione di scorrimento bilancia le variazioni di velocità causate
da variazioni del carico. Al fine di attivare la funzione, impostare il valore
a 1 ed ottimizzatelo come riportato nell’esempio seguente.
Campo di regolazione: -2.50...2.50
Risoluzione:
0.01
Impostazione di fabbrica: 0.00 (off)
Impostazione del cliente:
_______
Il boost automatico genera una compensazione automatica I*R,
aumentando la tensione in uscita durante coppie di carico elevate. La
corrente magnetizzante rimane costante. Al fine di attivare la funzione,
impostare il valore a 1 ed ottimizzatelo come riportato nell’esempio
seguente.
Boost automatico
Campo di regolazione: -2.50...2.50
Risoluzione:
0.01
Impostazione di fabbrica: 0.00 (off)
Impostazione del cliente: _______
Il boost automatico e la compensazione di scorrimento lavorano
sulla base dei dati del motore preimpostati. Utilizzando motori
speciali o un sovradimensionamento di più di una taglia entrambe
le funzioni devono essere disattivate.
f/nreale
M
carico
1
2
3
CP.18
CP.19
CP.19
n
CP.18
f
nreale
=
f
nreale
=
f
nreale
=
f
nreale
OK !
=
77
I
Utilizzo dell’unità
DC-braking
Con il DC-braking il motore non viene decelerato tramite la rampa. La
tensione in continua iniettata negli avvolgimenti del motore consente una
fermata rapida. Questo parametro consente di selezionare la condizione
di attivazione del DC-braking.
Valore Attivazione
0
DC-braking non attivato
1
DC-braking attivo disabilitando la direzione di rotazione e al
raggiungimento di 0Hz. Il tempo di frenatura dipende da CP.21
o dalla selezione di una nuova direzione di rotazione.
2
DC-braking attivo non appena si disattivata la direzione di
rotazione.
3
DC-braking attivo non appena viene variata la direzione di
rotazione. Il tempo di frenatura dipende dalla frequenza reale.
4
DC-braking attivo disabilitando la direzione di rotazione e quando
la frequenza reale è al di sotto di 4 Hz.
5
DC-braking attivo quando la frequenza reale è al di sotto di 4 Hz.
6
DC-braking attivo non appena la frequenza reale è al di sotto di
4 Hz.
7
DC-braking attivo quando l’ingresso I3 (terminale X1.6/versione
C) viene attivato.Il tempo di frenatura dipende dalla frequenza
reale. (Con versione S = "0")
8
DC-braking attivo finchè l’ingresso I3 (terminale X1.6/versione
C) viene attivato. (Con versione S = "0")
9
DC-braking attivo abilitando la modulazione. il tempo di frenatura
dipende da CP.21.
Impostazione di fabbrica:
7
Note:
Enter-Parameter
Impostazione del cliente:
_______
tempo di frenatura
Il tempo di frenatura ha 2 effetti differenti, dipendenti da CP.20:
- tempo impostato = tempo di frenatura
- il tempo impostato si riferisce a 100Hz e aumenta/diminuisce
proporzionalmente alla frequenza reale.
Campo di regolazione: 0.00...100 s
RIsoluzione:
0.01 s
Impostazione di fabbrica:
10 s
Impostazione del cliente:
_______
Formula:
f
100 Hz
fist
tBist CP.21
tBist
=
CP.21 * fist
100 Hz
t
Utilizzo dell’unità
uscita relè
L’uscita relè (terminali X1.1...X1.3) è impostata in fabbrica quale uscita
dipendente dalla frequenza. Raggiungendo la frequenza impostata in CP.23
il relè commuta. Questo parametro programma l’uscita secondo le funzioni
della lista sottostante.
Valore Funzione
0
Senza funzione
1
Generalmente attiva
2
Fault relè
3
Fault relè (non commuta quando Auto-Restart è attivo)
4
Avvertimento Overload
5
Avvertimento sovratemperatura inverter
6
Avvertimento sovratemperatura motore (10s prima della disattivazione)
7
Solo per application-mode
8
Corrente costante max. (stall, CP.15) superata
9
LA-/LD-Stop max. (CP.14) superato
10 DC-braking attivo
11 Solo per application-mode
12 Assorbimento (CP.3) > 100%
13 L’uscita è attiva se il motore è generatore
14 Valore attuale = valore impostato (CP.2 = Fcon, rcon; non in noP,
LS, errore, SSF)
15 Accelerazione (CP.2 = FAcc, rAcc, LAS)
16 Decelerazione (CP.2 = FdEc, rdEc, LdS)
17 Rotazione oraria (non in noP, LS errore)
18 Rotazione antioraria (non in noP, LS errore)
19 Direzione di rotazione reale = direzione di rotazione impostata
20 Valore reale > livello di frequenza CP.23
21 Valore impostato > livello di frequenza CP.23
22 Solo per application-mode
23 Segnale operativo (dopo l’inizializzazione se non si verificano errori)
24 Segnale partenza
25...xx Solo per application-mode
Impostazione di fabbrica:
2
Note:
Enter-Parameter
Impostazione del cliente:
_______
segnale di frequenza
Questo parametro consente di impostare il punto di commutazione per l’uscita
relè - X1.21...X1.23 (soltanto con Versione-C).
- X1.1...X1.3 (Versione-S solo se CP.22 = “20” e “21”).
Dopo la commutazione del relè, la frequenza può oscillare entro una
frequenza di 0.5Hz, senza che il relè commuti nuovamente.
Campo di regolazione: 0.0...409.58 Hz
Risoluzione:
0.0125 Hz
Impostazione di fabbrica:
4 Hz
Impostazione del cliente:
_______
Utilizzo dell’unità
segnale valore impostato
soltanto versione C
L’ingresso per il valore impostato REF (terminale X1.17 / versione C) può
essere pilotato con diversi livelli di segnale. Opera in somma algebrica con
ingressi REF+/REF- (terminali X1.8/X1.9), ma può essere utilizzato come
unico ingresso per impostare il valore di riferimento. Al fine di valutare
correttamente il segnale, il parametro deve essere adattato alla sorgente del
segnale.
f
Valore
0
1
2
Segnale di riferimento
0...10V DC / Ri = 4 kΩ
0...20mA DC / Ri = 250 Ω
4...20mA DC / Ri = 250 Ω
Impostazione di fabbrica:
Impostazione del cliente:
I
80
0
_______
CP.10
CP. 9
0V
0 mA
4 mA
10 V
20 mA
20 mA
URef
Modo drive
2.7 Il modo Drive
Il modo Drive è una modalità operativa speciale del KEB COMBIVERT.
Il suo compito è quello di effettuare l’avviamento manuale dell’inverter.
Abilitando il rilascio del motore la selezione del valore impostato e della
direzione di rotazione vengono effettuati esclusivamente con la tastiera.
Per attivare il modo drive, è necessario immettere la password
corrispondente in CP.0. Il display cambierà come indicato.
Stato
Direzione di rotazione
noP
=
motore
rilasciato /
F=oraria / r=antioraria
LS = motore abilitato
L’inverter scende a 0 Hz e
disattiva la modulazione
Modulazione bloccata
Inverter non pilotato
2.7.1 Start / Stop Drive
STOP
START
L’inverter opera con il valore
impostato preselezionato
L’inverter accelera fino
al
valore
impostato
preselezionato
I
2.7.2 Cambio della direzione
di rotazione
ENTER
2.7.3 Preselezionare il
valore impostato
FUNC.
F/R
SPEED
Il display cambia quando il
tasto viene premuto per
impostare il valore/display
preselezionato
Il valore impostato può
essere cambiato con UP/
DOWN premendo il tasto
FUNC/SPEED
STOP
START
2.7.4 Lasciare il modo
drive
L’inverter cambia
la direzione di
rotazione
Per uscire dal modo drive l’inverter deve essere nello stato “stop”.
Premere i tasti FUNC e ENTER simultaneamente per circa 3 secondi al
fine di lasciare il modo drive. I parametri CP compariranno a display.
FUNC.
SPEED
+
ENTER
F/R
per 3 secondi
81
Diagnostica errori
3. Diagnostica errori
I messaggi di errore sono rappresentati sul KEB COMBIVERT con una
"E". E l’errore corrispondente sul display. Le visualizzazioni e le loro
cause son descritte di seguito.
sottotensione
Si verifica quando la tensione del circuito intermedio scende al di sotto del
valore consentito. Le possibili cause sono
- tensione in ingresso troppo bassa o instabile
- potenza inverter troppo piccola
- cadute di tensione causate da cablaggio errato
- l’alimentazione fornita da generatori/transformatori
si interrompe perchè le rampe sono troppo brevi
sovratensione
Si verifica quando la tensione del circuito intermedio sale al di sopra del
valore consentito. Le possibili cause sono
- tensione di alimentazione troppo alta
- disturbi in tensione all’ingresso
- rampa di decelerazione troppo breve
sovracorrente
Si verifica quando la corrente in uscita supera il picco di corrente.
sovraccarico
Si verifica quando la corrente in uscita >150% per più di 30s, > 130% per
più di 2 min. o > 110% per più di 5 min. Le possibili cause sono
- errore o sovraccarico nell’applicazione
- inverter non correttamente dimensionato
- motore non correttamente cablato
fase di raffreddamento
completata
Dopo l’errore E. OL è necessario attendere per il tempo di raffreddamento.
Questo messaggio compare dopo che la fase di raffreddamento è
completata. L’errore può essere resettato.
sovratemperatura
Si verifica quando la temperatura dell’ inverter >70°C. Le possibili cause
sono
- raffreddamento insufficiente
- temperatura ambiente troppo elevata
- ventilatore guasto
sovratemperatura ext.
Si verifica quando il sensore di temperatuta esterna commuta. Le
possibili cause sono - resistena sui terminali OH/OH > 1650 Ohm
- motore sovraccaricato
- cavi interrotti
no sovratemperatura
Non sussiste più sovratemperatura interna o esterna. L’ errore E. OH” o
E.dOH” può essere resettato.
errore resistenza limitatrice
corrente
La resistenza di limitazione corrente non è cortocircuitata, può verificarsi
per breve tempo durante l’accensione ma si resetta immediatamente. Se
l’errore permane le cause possono essere
- tensione in ingresso sbagliata o troppo bassa
- perdite elevate nell’alimentazione
- resistena di frenatura non correttamente collegata
- modulo freno difettoso
I
82
Consultazione rapida
Regolazioni
CP. 0
CP. 1
CP. 2
CP. 3
CP. 4
CP. 5
CP. 6
CP. 7
CP. 8
CP. 9
CP.10
CP.11
CP.12
CP.13
CP.14
CP.15
CP.16
CP.17
CP.18
CP.19
CP.20
CP.21
CP.22
CP.23
CP.24
Parametro
Inserimento password
Frequenza attuale
Stato inverter
Carico attuale
Picco di carico
Impostazione frequenza
Boost
Tempo di accelerazione
Tempo di decelerazione
Frequenza minima
Frequenza massima
Frequenza fissa 1
Frequenza fissa 2
Frequenza fissa 3
Corrente max. in rampa
Corrente max. costante
Speed search
Stabilizzazione tensione
Slip compensation
Autoboost
DC-braking
Tempo di DC-Braking
Uscita relè
Segnale di frequenza
Regolazione segnale (soltanto Vers.C)
Regolaz.range
0...9999
0...409.58 Hz
0...25.5 %
0.01...300 s
0.01...300 s
0...409.58 Hz
0...409.58 Hz
0...±409.58 Hz
0...±409.58 Hz
0...±409.58 Hz
10...200 %
10...200 %
0...15
150...649 V,off
-2.50...2.50
-2.50...2.50
0...9
0...100 s
0...xx
0...409.58 Hz
0...2
Risoluzione
1
0,1 Hz
1%
1%
0.0125 Hz
0.1 %
0.01 s
0.01 s
0.0125 Hz
0.0125 Hz
0.0125 Hz
0.0125 Hz
0.0125 Hz
1%
1%
1
1V
0.01
0.01
1
0.01 s
1
0.0125 Hz
1
Cliente
__________
__________
__________
__________
__________
__________
__________
__________
__________
__________
__________
__________
__________
__________
__________
__________
__________
__________
__________
__________
FUNC.
l tasto function (FUNC) cambia tra il valore del parametro
e il numero del parametro.
SPEED
Con UP e DOWN si incrementa e decre-menta il numero
del parametro e il valore del parametro.
STOP
STOP
START
START
Inserimento Password:
Protezione
Parametri-CP
Password
ENTER
Rilascio
Parametri-CP
Password
UP
UP
FUNC
ENTER
FUNC
83
I
128
6.
Password
Password
ENTER
UP
a) CP-Parameter "read only"
FUNC
Password
ENTER
UP
b) CP-Parameter "read/write"
FUNC
Password
XX
c) Drive mode activ
FUNC
a)
100
b)
200
ENTER
UP
c)
500
129
130
D
Vor Auslieferung durchlaufen alle Produkte mehrfach eine Qualitäts- und Funktionskontrolle, so daß
Fehler auszuschließen sind. Bei Beachtung unserer Betriebsanleitung sind keine Störungen zu
erwarten. Sollte sich trotzdem ein Grund zur Reklamation ergeben, so ist das Gerät mit Angabe der
Rechnungsnummer, des Lieferdatums, der Fehlerursache und den Einsatzbedingungen an uns
zurückzusenden. Für Fehler, die aufgrund falscher Behandlung, falscher Lagerung oder sonstigen
allgemeinen Irrtümern auftreten, übernehmen wir keine Verantwortung. Prospekte, Kataloge und
Angebote enthalten nur Richtwerte. Technische Änderungen jeder Art behalten wir uns vor. Alle Rechte
vorbehalten. Nachdruck, Vervielfältigung und fotomechanische Wiedergabe sind ohne schriftliche
Genehmigung durch KEB auch auszugsweise verboten.
F
Avant la livraison tous les produits passent par différents contrôles fonctionnels et qualitatifs de manière
à éliminer les mauvais fonctionnements. L'apparition de défauts sur ces produits est très improbable s'ils
sont raccordés et utilisés selon les recommandations des manuels d'instructions. Néanmoins, si un
défaut apparaissait, le matériel doit être retourné en indiquant le numéro du bon de livraison, la date
d'expédition et les détails apparents du défaut ainsi que le type d'application. Un mauvais emploi, de
mauvaises conditions de stockage ou d'autres causes de ce type excluent notre responsabilité en cas
de défectuosité. Les documents techniques et commerciaux, les offres de prix ne contiennent que des
valeurs standards. Nous nous réservons le droit de procéder à des modifications techniques sans
préavis. Tout droit réservé. Toutes contrefaçons imprimées, ou reproductions photomécaniques; même
partielles, sont strictement interdites.
GB
Prior to delivery all products pass several quality and performance inspections so that malfunctions can
be ruled out. When used in accordance with the operating instructions failure is most unlikely. However,
if you have cause for complaint the unit should be returned stating invoice number, delivery date, cause
of failure and field conditions. We do not accept the responsibility for failures due to misuse, wrong
storage or similar causes. Leaflets, catalogues and quotations contain only standard values. We reserve
the right to make technical changes without obligation. All rights reserved. Any piratic printing,
mimeograhing or photomechanical reproduction, even in extracts, is strictly prohibited.
I
Prima di essere spediti, tutti i nostri prodotti sono soggetti a severi controlli di qualità e funzionamento,
questo al fine di evitare malfunzionamenti. Se utilizzati seguendo il manuale di istruzione si evita
qualsiasi malfunzionamento. Comunque, qualora dovesse verificarsi un guasto, l’unità dovrà essere
rispedita specificando il numero di bolla, la data di spedizione, i dettagli del guasto ed il tipo di
applicazione. Non si assumono responsabilità per errori dovuti a manomissioni, cattivo stoccaggio o
simili. Ci riserviamo di effettuare qualsiasi modifica senza preavviso alcuno. Tutti i diritti sono riservati.
Qualsiasi riproduzione non autorizzata, anche parziale, è rigorosamente proibita.
E
Antes de ser enviados todos los productos pasan severos controles de calidad por lo que pueden
descartarse defectos. Cuando sea utilizado de acuerdo con las instrucciones de operación una avería
no es nada probable. Sin embargo, si tiene motivo de reclamación la unidad podría devolverse
indicando número de factura, fecha de entrega, causa del fallo y condiciones de instalación. Nosotros
no aceptamos la responsabilidad por fallos debidos a mal uso, almacenaje incorrecto o causa similar.
Los folletos, catalogues y ofertas contienen sólo valores estándar. Nos reservamos el derecho de
modificar el equipo sin ninguna obligación. Todos los derechos reservados. Cualquier impresión pirata,
reproducción mimeógrafia o fotomecanica, incluso en parte, está estrictamente prohibida.
RU
Перед отгрузкой все изделия неоднократно проходят проверку на предмет качества и
работоспособность, так что брак исключается. При соблюдении нашего руководства по
эксплуатации появление неисправностей не ожидается. Если вопреки этому, всё таки появятся
основания для рекламации, изделие необходимо отправить на наш адрес с указанием номеров
товарной накладной и счёта, датой поставки, причиной приведшей к выходу изделия из строя
и условий эксплуатации.
Фирма КЕВ не несёт ответственность за выход изделий из строя по причинам не правильного
храненя, транспортировки, неправильного обращения и других ошибочных действий. Проспекты,
каталоги и коммерческие предложения содержат только ориентировочные значения. Мы
оставляем, за собой право вносить технические изменения любого рода. Все права принадлежат
нам. Размножение, перепечатывание, фотомеханическое воспроизведение, даже частичное,
без письменного разрешения на то фирмы КЕВ запрещено.
Karl E. Brinkmann GmbH
Försterweg 36-38 • D-32683 Barntrup
fon: +49 5263 401-0 • fax: +49 5263 401-116
net: www.keb.de • mail: [email protected]
KEB Antriebstechnik GmbH & Co. KG
Wildbacher Str. 5 • D–08289 Schneeberg
fon: +49 3772 67-0 • fax: +49 3772 67-281
mail: [email protected]
KEB - YAMAKYU Ltd.
15–16, 2–Chome, Takanawa Minato-ku
J–Tokyo 108-0074
fon: +81 33 445-8515 • fax: +81 33 445-8215
mail: [email protected]
KEB Antriebstechnik Austria GmbH
Ritzstraße 8 • A-4614 Marchtrenk
fon: +43 7243 53586-0 • fax: +43 7243 53586-21
Kostelni 32/1226 • CZ-370 04 Ceské Budejovice
fon: +420 38 7319223 • fax: +420 38 7330697
net: www. keb.at • mail: [email protected]
KEB - YAMAKYU Ltd.
711, Fukudayama, Fukuda
J–Shinjo-Shi, Yamagata 996 - 0053
fon: +81 233 29-2800 • fax: +81 233 29-2802
mail: [email protected]
KEB Antriebstechnik
Herenveld 2 • B-9500 Geraadsbergen
fon: +32 5443 7860 • fax: +32 5443 7898
mail: [email protected]
KEB Nederland
Leidsevaart 126 • NL–2013 HD Haarlem
fon: +31 23 5320049 • fax: +31 23 5322260
mail: [email protected]
KEB Taiwan Ltd.
No.8, Lane 89, Sec.3; Taichung Kang Rd.
R.O.C.-Taichung City / Taiwan
fon: +886 4 23506488 • fax: +886 4 23501403
mail: [email protected]
Société Française KEB
Z.I. de la Croix St. Nicolas • 14, rue Gustave Eiffel
F-94510 LA QUEUE EN BRIE
fon: +33 1 49620101 • fax: +33 1 45767495
net: www.keb.fr • mail: [email protected]
KEB Sverige
Box 265 (Bergavägen 19)
S-4393 Hälsö
fon: +46 31 961520 • fax: +46 31 961124
mail: [email protected]
KEB (UK) Ltd.
6 Chieftain Buisiness Park, Morris Close
Park Farm, Wellingborough GB-Northants, NN8 6 XF
fon: +44 1933 402220 • fax: +44 1933 400724
net: www.keb-uk.co.uk • mail: [email protected]
KEBCO Inc.
1335 Mendota Heights Road
USA-Mendota Heights, MN 55120
fon: +1 651 4546162 • fax: +1 651 4546198
net: www.kebco.com • mail: [email protected]
KEB Italia S.r.l.
Via Newton, 2 • I-20019 Settimo Milanese (Milano)
fon: +39 02 33500782 • fax: +39 02 33500790
net: www.keb.it • mail: [email protected]
00.F4.C0B-K110
KEB CHINA Karl E. Brinkmann GmH
Beijing Representative Office
No. 36 Xiaoyun Road • Chaoyang District
CHN-10027 Beijing, PR. China
fon: +86 10 84475815 + 819 • fax: +86 10 84475868
net: www.keb.cn • mail: [email protected]
2/2004
KEB Portugal
Avenida da Igreja – Pavilão A n. º 261 Mouquim
P-4770 - 360 MOUQUIM V.N.F.
fon: +351 252 371318 + 19 • fax: +351 252 371320
mail: [email protected]
© KEB
KEB CHINA Karl E. Brinkmann GmH
Shanghai Representative Office
(Xinmao Building, Caohejing Development Zone)
No. 99 Tianzhou Road (No.9 building, Room 708)
CHN-200233 Shanghai, PR. China
fon: +86 21 54503230-3232 • fax: +86 21 54450115
net: www.keb.cn • mail: [email protected]