Capitolo V
MACCHINE SPECIALI
5.1.0.
Motore asincrono monofase
Il motore asincrono monofase è costituito da uno statore provvisto di un unico avvolgimento,
bipolare o multipolare, e da un rotore generalmente a gabbia. Alimentando l’avvolgimento statorico
con una corrente alternata sinusoidale di pulsazione w, si produce un campo magnetico alternativo,
fisso nello spazio e d’ampiezza variabile sinusoidalmente come la corrente che lo produce. Tale
campo si può scomporre in due campi rotanti aventi ampiezze uguali, costanti e pari alla metà di
quella massima del campo alternativo, e rotanti con velocità uguali ed opposte:
no =
60 f
p
Quello dei due campi rotanti che gira secondo il verso di marcia del motore, prende il nome di
campo diretto, e la sua velocità è:
nd = no
L’altro è denominato campo inverso e la sua velocità di rotazione è:
ni = −nd = −no
Per il motore asincrono monofase, rotante con velocità n, si definisce come scorrimento s
quello relativo al campo diretto ed è fornito dalla relazione:
s = sd =
nd − n
=
no − n
= 1−
n
nd
no
no
Lo scorrimento del campo inverso si valuta invece con la relazione:
si =
ni − n
ni
=
− no − n
− no
=
no + n
no
n
= 1+
no
Confrontando le due relazioni si verifica facilmente che risulta:
si = 2 − sd = 2 − s
Il rotore a gabbia può essere assimilato ad un rotore avvolto con le fasi in cortocircuito. I due
campi rotanti, diretto e inverso, inducono in esso due sistemi di forze elettromotrici: il primo sistema,
diretto, con frequenza s d f = s ⋅ f , il secondo, inverso, con frequenza s i f = ( 2 − s ) ⋅ f .- Il rotore è
pertanto sede di due sistemi di correnti, diretto e inverso, che a loro volta genereranno due coppie
meccaniche, dovute rispettivamente all’interazione delle correnti rotoriche col campo rotante diretto
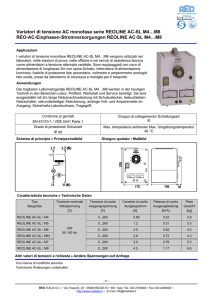
e con quello inverso.La coppia diretta agisce in modo concorde al moto; la coppia inversa si oppone invece alla
rotazione e quindi si sottrae a quella diretta.L’andamento di queste due coppie in funzione dei relativi scorrimenti è riportato nelle figure
seguenti:
69
12
10
10
8
8
Tg
Tg
12
6
6
Td
Ti
4
4
2
2
0
0
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
scorrimento inverso
scorrimento diretto
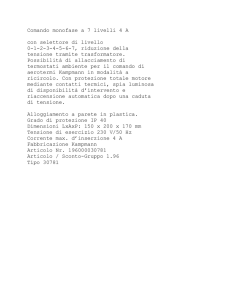
La coppia risultante del motore è pari alla differenza della coppia diretta e inversa espresse
però in funzione del medesimo scorrimento: quello diretto. Tenendo presente la relazione
s i = 2 − s d essa è rappresentata dalla seguente curva:
15
10
T
T
d
i
T=Td-Ti
5
T
0
0
0 ,2
0 ,4
0 ,6
0 ,8
1
1 ,2
1 ,4
1 ,6
1 ,8
2
-5
-1 0
s c o r r im e n to
La curva presenta la peculiarità di passare per l’origine degli assi per cui, se il motore è fermo
la coppia è nulla. Ciò si spiega in quanto, con il rotore immobile, la velocità dei due campi diretto e
inverso, rispetto al rotore, sono uguali e contrarie e danno quindi origine a due coppie T avv . dir . e
T avv . inv . che si fanno equilibrio. Affinché tale equilibrio sia rotto bisogna avviare il rotore in un verso
o nell’altro: in questo modo la coppia dovuta al campo che ruota nello stesso senso del rotore diventa
prevalente sulla coppia dovuta all’altro campo e nasce una coppia risultante che agisce nel verso del
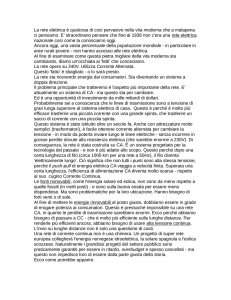
moto dato al rotore.La coppia risultante può anche essere rappresentata in funzione del numero di giri del rotore
tenendo presente la relazione:
60 f
n=
⋅ (1 − s )
p
70
Tg
numero di giri
-1200
-800
-400
0
400
994
800
1200
no=1000g/m
n'o=994g/m
(la curva è ricavata nel caso particolare di p = 3 ed f = 50 Hz )
Il motore monofase non ha dunque un verso di rotazione determinato, ma ruota sempre nel
senso secondo cui viene avviato. Si osserva inoltre come la coppia generata si annulli ad una velocità
n’0 leggermente inferiore a n0 . Ne risulta che, anche prescindendo dalle inevitabili perdite
meccaniche, la velocità a vuoto del motore è un po’ inferiore a quella di sincronismo.Per ovviare all’inconveniente costituito dal valore nullo della coppia di spunto e per mettere il
motore monofase in grado di avviarsi, si dispone sullo statore un opportuno avvolgimento ausiliario
spostato di 90 gradi elettrici rispetto all’avvolgimento principale. Facendo percorrere gli
avvolgimenti statorici da due correnti I’ e I” fra di loro sfasate di un angolo prossimo ai 90° si genera
un campo rotante, come in un motore bifase, che seppure d’intensità non costante è tuttavia in grado
di trascinare in moto il rotore. È così risolto il problema dell’avviamento in quanto, grazie alla fase
ausiliaria, la coppia di spunto è ora diversa da zero.-
Questi motori sono alimentati da un’unica sorgente monofase di tensione V; lo sfasamento
della corrente nella fase ausiliaria è ottenuto ponendole in serie un condensatore che può rimanere
permanentemente inserito o scollegato dalla sorgente, mediante un interruttore centrifugo, una volta
71
avviato il motore. Si usano anche motori con due condensatori, inserendoli entrambi all’avviamento e
scollegandone uno a motore avviato.Se la fase ausiliaria è inserita soltanto all’avviamento, la caratteristica meccanica diventa
come quella della prima figura. Nel primo tratto, dallo spunto fino alla velocità n1 alla quale la fase
ausiliaria viene aperta (ad esempio per mezzo di un interruttore centrifugo), la curva è quella usuale
di un motore con fase ausiliaria permanente; per velocità superiori a n1 la coppia è quella di un
motore monofase.I motori asincroni monofasi trovano vaste applicazioni nel campo delle macchine utensili,
pompe, ventilatori ecc., di potenza fino a qualche kW. La preferenza, data a questi motori rispetto a
quelli trifasi, è dovuta alla possibilità d’alimentazione con una linea monofase di cui ogni utente è
provvisto. Un campo in cui viene quasi esclusivamente impiegato il motore monofase con
condensatore permanente è quello delle lavabiancheria. I motori installati in tali elettrodomestici sono
in genere realizzati con doppio avvolgimento statorico, uno con elevato numero di poli (da 12, 16 o
anche 24), l’altro con soli 2 o 4 poli. Ciò consente di avere con lo stesso motore due velocità di
lavoro necessarie per le fasi di lavaggio (bassa velocità) e di centrifugazione (alta velocità).Il motore monofase del tipo a condensatore permanentemente inserito trova anche impiego
come servomotore in economici azionamenti elettrici. Il controllo della velocità si esegue agendo
sulla tensione d’alimentazione.-
5.2.0.
Motore asincrono a poli schermati
Questo tipo di motore è in pratica un motore asincrono monofase con un particolare tipo
d’avvolgimento ausiliario per l’avviamento.Il rotore è a gabbia e lo statore è del tipo a poli sporgenti sui quali sono avvolte le spire
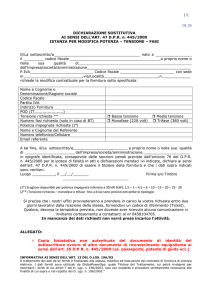
concentrate costituenti l’induttore.L’avvolgimento ausiliario è
costituito da alcune spire chiuse
in corto circuito e disposte in un
intaglio
ad
un’estremità
dell’espansione polare in modo
che
il
flusso
alternativo
dell’avvolgimento principale vi
induca una corrente fortemente
sfasata rispetto la corrente
dell’avvolgimento
principale
stesso; a seguito dello sfasamento
meccanico tra i due avvolgimenti
e quello elettrico tra le due
correnti nascerà un campo rotante
statorico in grado generare
la coppia di spunto del motore.Il maggior pregio del motore è la sua semplicità costruttiva e quindi il suo basso costo; di
contro ha un basso valore di coppia di spunto ed un rendimento inferiore al 25%; la potenza asse non
supera le decine di Watt.- Il verso di rotazione, come risulta dalla figura, è legato alla posizione degli
intagli sede dell’avvolgimento ausiliario.- Trova impiego negli elettrodomestici, pompe, bruciatori.-
72
5.3.0.
Motore monofase a collettore
Questo tipo di motore deriva direttamente dal motore a corrente continua eccitato in serie.
È infatti evidente che il motore a corrente continua con eccitazione in serie funziona anche se
viene alimentato con corrente alternata, perché ad ogni inversione della corrente d’alimentazione si
verifica l’inversione contemporanea sia del campo induttore sia della corrente nell’indotto: il verso
della coppia motrice (elettromagnetica) generata rimane perciò invariato e il motore si mette in
rotazione.Tuttavia, se si alimentasse con corrente alternata un ordinario motore in serie per corrente
continua, il suo funzionamento risulterebbe assai difettoso.
In primo luogo la costruzione massiccia della carcassa e dei poli, caratteristica delle macchine
a corrente continua, non è compatibile col flusso induttore alternato. È indispensabile quindi
applicare la costruzione laminata all’intero circuito magnetico.
Inoltre, per ottenere un fattore di potenza sufficientemente alto, è necessario ridurre al minimo
l’induttanza dei due avvolgimenti induttore e indotto in serie fra loro: il primo viene ridotto perciò a
poche spire per polo, mentre, per rendere trascurabile la reattanza dell’indotto, si applicano fra i poli
del sistema induttore i noti avvolgimenti compensatori atti ad annullare quasi totalmente il campo
trasverso d’indotto.Il fenomeno della commutazione, nel funzionamento a corrente alternata risulta assai più
complesso, per la presenza di una f.e.m. di tipo trasformatorico (oltre a quella d’autoinduzione) nelle
spire in commutazione. Per ottenere un comportamento soddisfacente è necessario ridurre al minimo
l’induttanza delle spire, adottando passi d’avvolgimento raccorciati onde diminuire l’area abbracciata
e disponendo i conduttori entro cave aperte: oltre a ciò si aumenta la resistenza ohmica delle spire in
commutazione costruendo i collegamenti al collettore con leghe ad alta resistività.Tutti questi artifici riescono a rendere abbastanza soddisfacente, alle ordinarie frequenze
industriali, il funzionamento dei motori in serie di piccola e media potenza, ma sono ancora
insufficienti per le potenze maggiori. Per i motori di grande potenza si richiede un’ulteriore riduzione
delle varie reattanze in gioco, e ciò può ottenersi solo facendoli funzionare con frequenza ridotta
entro il campo da 15 a 25 Hz.Lo schema elettrico di questi motori e il relativo diagramma vettoriale e illustrato in figura.
La f.e.m. che si genera alle spazzole ha andamento sinusoidale ed è rappresentata da un
vettore E in fase con la corrente assorbita I . Se infatti l’equazione di questa corrente è:
i = I M sen ω t
l’espressione del flusso induttore per polo risulta:
73
ϕ = k 1 I M sen ω t
si può allora scrivere:
e = k ⋅ n ⋅ ϕ = k ⋅ n ⋅ k 1 I M sen ω t
Questa f.e.m. può essere rappresentata dal vettore:
o
o
E = k ⋅k1 ⋅n ⋅ I
mentre la tensione d’alimentazione V si ottiene sommando a tale f.e.m. le cadute di tensione interne
sulla resistenza R i totale degli avvolgimenti indotto e induttore, e sulla reattanza X i degli stessi
avvolgimenti:
o
o
o
o
V = E + R i I + jX i I
Sul diagramma polare che rappresenta questa equazione si tracci la semicirconferenza OBA
avente per diametro la tensione d’alimentazione V. Al variare delle condizioni di carico del motore, e
cioè al variare della coppia, della velocità e della corrente assorbita, il punto B si sposta su tale
semicirconferenza. Risulta infatti evidente che per qualsiasi valore della corrente I l’angolo a deve
costantemente risultare di 90°.In particolare si nota che il fattore di potenza del motore, espresso dal rapporto
cosf = OB/OA = OB/V, varia al variare del carico proporzionalmente alla lunghezza del segmento
OB. Il suo minimo (e quindi il massimo sfasamento fra tensione e corrente, corrispondente all’angolo
fa) si ha all’atto dell’avviamento quando, risultando n = O ed E = O, il punto di funzionamento si
porta in Ba e l’equazione del motore assume la forma:
o
o
o
V = R i I a + jX i I a
essendo Ia la corrente assorbita allo spunto. Per quest’ultima (che rappresenta la massima corrente
assorbita dal motore) e per il corrispondente fattore di potenza cosfa (dell’ordine di 0,2) si ricavano
perciò le espressioni:
Ia =
V
R i2 + X i2
cos ϕ a =
Ri
R i2 + X i2
All’aumentare della velocità di rotazione n, cresce il valore della f.e.m. E, e il punto di
funzionamento si sposta sulla semicirconferenza da Ba verso il punto B e il punto A, e pertanto la
corrente assorbita diminuisce d’intensità; lo sfasamento pure diminuisce e aumenta invece il fattore
di potenza.Da ultimo la coppia sviluppata dal motore. Per ogni condizione di carico essa è ancora data
dalla relazione:
T = k’ F I
vista per i motori a corrente continua ma applicata però ai valori istantanei della corrente e del flusso.
Ne segue che il suo valore non è costante nel tempo, ma varia in modo pulsante secondo la relazione:
T = k 'ϕ ⋅ i = k ' k 1 I M2 sen 2 ω t
che ammette un valore medio espresso da
T medio = k ' k 1 I 2
proporzionale al quadrato del valore efficace della corrente assorbita.Come in un normale motore in serie, la coppia è massima allo spunto (la I è massima) e
decresce fortemente all’aumentare del numero di giri n .-
74
La caratteristica meccanica T(n) dei motori a collettore è riportata in figura.-
Per confronto è riportata (a tratteggio) la caratteristica meccanica che si otterrebbe
alimentando lo stesso motore con tensione continua di valore pari al valore efficace di quella
alternata. La minore coppia che si ottiene (a parità di giri) nel funzionamento in alternata è imputabile
alla reattanza (che determina una minore corrente a pari f.e.m.) e alla saturazione del circuito
magnetico (per i valori più alti della corrente).Rispetto ai motori in continua, i motori monofasi presentano il notevole vantaggio che per
l’avviamento e per la regolazione della velocità non è necessario ricorrere all’impiego di reostati,
potendosi ottenere gli stessi risultati con maggior rendimento, regolando la tensione d’alimentazione
mediante trasformatori a rapporto variabile.I motori monofasi in serie trovano applicazione per le piccole potenze nel comando di
ventilatori, aspiratori, lucidatrici, pompe ecc.; le potenze maggiori trovano invece applicazioni più
importanti nella trazione elettrica col sistema a corrente alternata monofase (frequenza di 50/3 oppure
25 Hz).-
5.3.1.
Motori universali
I motori monofasi a collettore di piccola o piccolissima potenza vengono quasi sempre
realizzati per poter operare sia in corrente alternata sia in corrente continua con funzionamento
pressoché identico con le due alimentazioni.
I motori così concepiti vengono denominati come motori universali. La loro caratteristica
fondamentale è l’elevata velocità nel funzionamento a vuoto (fino a 20.000 giri/min). Questa velocità
decresce rapidamente all’aumentare del carico, e viceversa. L’impiego di questi motori è molto
diffuso in quelle applicazioni che richiedono piccoli sforzi alle alte velocità e sforzi notevoli alle
velocità più basse (trapani, aspiratori ecc.).
Costruttivamente sono improntati alla massima semplicità e realizzano un elevato rapporto
potenza/peso: mancano gli avvolgimenti compensatori; l’avvolgimento d’eccitazione è sempre
concentrato in due poli soltanto.-
75
Capitolo VI
CONVERTITORI STATICI
6.1.0 Generalità
La tecnica attuale offre la possibilità di generare con facilità l’energia elettrica sotto forma di
corrente alternata trifase che, attraverso opportune linee di trasmissione, viene portata all’ingresso
delle varie utenze ( Il trasporto, per questioni di rendimento, viene fatto con valori di tensione
notevolmente maggiori a quelle di produzione, mentre alle utenze, per questioni di sicurezza ed
isolamento, viene fornita a valori notevolmente inferiori a quelli di trasporto e generazione; all’uopo
vengono utilizzati i trasformatori statici precedentemente studiati).- La scelta del sistema trifase
deriva dalla sua maggior economicità rispetto tutti gli altri.Esistono però diverse applicazioni che necessitano di tensioni di alimentazione diverse dalla
trifase alternata alla frequenza fissa di rete: nasce quindi la necessità di convertire la tensione e la
frequenza della rete stessa o di rettificare la tensione alternata in modo da ottenere una tensione
continua di valore opportuno eventualmente regolabile o tal volta anche la riconversione della
tensione continua in alternata di frequenza e valore efficace opportuni e variabili.La risposta a tali necessità viene fornita dai convertitori statici basati sull’impiego di
interruttori elettronici allo stato solido ( Diodi, Tiristori, Transistor bipolari di potenza, Mosfet )
capaci di commutare correnti dell’ordine dei kA sotto tensioni di alcuni kV in tempi dell’ordine dei
micro secondi).I convertitori statici comprendono quindi uno o più interruttori statici le cui aperture e
chiusure vengono pilotate in modo da ottenere la conversione desiderata; i principali tipi di
convertitori sono:
RADDRIZZATORI che convertono la Corrente alternata in Corrente continua
INVERTER
che convertono la Corrente continua in Corrente alternata
REGOLATORI
che convertono la Corrente alternata in Corrente alternata di valore e
frequenza diversi
CHOPPER
che convertono la Corrente continua in Corrente continua di valore diverso
---- Il DIODO è in bipolo non lineare che, teoricamente, offre una resistenza infinita al passaggio
della corrente quando è polarizzato inversamente cioè con VA<VK e una resistenza nulla quando e polarizzato
direttamente con VA>VK.
76
In realtà il diodo entra in conduzione per una tensione VA>VK + Vs ove Vs è una tensione di soglia che
per i diodi al silicio vale 0,6 V , dopo di che presenta una certa resistenza al passaggio della corrente per cui si
avrà una dissipazione di potenza che porta al surriscaldamento del dispositivo e quindi ad una limitazione della
corrente sopportabile pari a IMax .In oltre quando è polarizzato inversamente con VA< VK se la tensione inversa supera il valore limite
VMax inv si nota un brusco ed incontrollato passaggio di corrente in senso inverso che perfora il dispositivo
rendendolo inutilizzabile.------ Il TIRISTORE o SCR (Silicon Controlled Rectifier) è un tripolo che differisce dal diodo sopra
visto per la presenza di un terzo elettrodo detto GATE o Porta .- L’ SCR è un dispositivo che normalmente
impedisce il passaggio della corrente in entrambe le direzioni ( si comporta cioè come un interruttore aperto)
sino a quando non viene applicato un brevissimo impulso positivo di tensione al Gate dopo di che , se la
tensione anodica e maggiore di quella catodica, entra in conduzione (si comporta cioè come un interruttore
chiuso) fino a quando risulta VA> VK .-
------ I TRANSISTOR Bipolari di Potenza sono dispositivi tripolari che riescono commutare
in alcuni microsecondi correnti di centinaia di ampere sotto tensioni di qualche kilovolt rimanendo in
stato di conduzione fino a che, polarizzati direttamente, la base di controllo continua a ricevere un
opportuno segnale di consenso.-
77
6.2.0
Raddrizzatori
I raddrizzatori sono dispositivi adatti ad eseguire la conversione da una tensione alternata
d’ingresso ad una tensione continua d’uscita.- Se il circuito permette la regolazione della tensione
d’uscita, prende il nome di Raddrizzatore controllato in caso contrario prende il nome di
Raddrizzatore non controllato.-
6.2.1.
Raddrizzatori non controllati a gruppi di commutazione:
6.2.1.1.
Monofase:
Il raddrizzatore monofase non controllato a gruppo di commutazione presenta lo schema di
figura:
Durante il semiperiodo positivo della tensione alternata d’alimentazione, il diodo risulta
polarizzato direttamente per cui si comporta come un interruttore chiuso, la corrente lo attraversa
dall’anodo verso il catodo e alla resistenza R è applicata la tensione VR uguale alla tensione di
alimentazione; durante il semiperiodo negativo della tensione di alimentazione, il diodo è polarizzato
inversamente per cui non è attraversato da alcuna corrente, la tensione ai capi della R è nulla e
l’intera tensione applicata cade ai capi del diodo che sarà sottoposto ad una tensione inversa il cui
valore massimo è uguale al valore massimo della tensione alternata.Ai capi della resistenza di carico si avrà una tensione pulsante, come indicato in figura, il cui
valore medio risulterà:
T
2 V eff
VM 1
2π 2 V M
t =
V Medio = ∫ 2 V M sen ω t ⋅ dt =
=
= 0 , 45 ⋅ V eff
− cos
π
π
T ω
T 0
T 0
Si definisce così il rapporto di conversione:
V Medio
2
=
= 0.45
π
V eff
Il fattore di ondulazione è dato da:
V − Vmin
V −0
π
= 100 = 157%
= 100 Max
r % = 100 Max
V
2
2 ⋅ V Medio
2 ⋅ Max
π
1
T
78
La tensione massima inversa applicata al diodo risulterà:
V Max .inv . = V Max
V Max inv
V Max
Da cui si ricava:
=
= π = 3 ,14
V Medio
V Medio
6.2.1.2.
Polifase :
Il raddrizzatore polifase non controllato a gruppo di commutazione presenta lo schema di
figura:
Essendo i diodi, quando sono in condizione di conduzione, praticamente dei corto circuiti, il
punto A assume il potenziale di uscita del generatore collegato al diodo che in quel momento sta
conducendo.- Poiché A non può essere contemporaneamente a potenziali diversi, risulta che può
essere in fase di conduzione un solo diodo alla volta; ciò avviene se in ogni istante conduce
solamente quel diodo che risulta collegato al morsetto del generatore che in quell’istante è a tensione
maggiore rispetto agli altri.- La tensione VR sul carico coinciderà in ogni istante con la tensione del
ramo posto in conduzione, cioè quel ramo che il quell’istante fornisce la tensione maggiore.Ciascun ramo rimarrà in conduzione per un intervallo di tempo pari al periodo della tensione
alternata diviso per il numero di rami posti in parallelo: T/q .Il valore medio della tensione pulsante ai capi del carico risulterà:
+
V Medio
1
=
T
q
−
T
2q
2q
2π T
2π T
q VM T
+ sen
=
sen
=
T 2π
T 2q
T 2q
π q 2
π
q
= V M sen =
Veff sen
π
π
q
q
79
T
+
q VM
2q
[
]
cos
⋅
=
sen
ω
ω
V
t
dt
t
T =
∫T M
−
T ω
2q
V Medio
Il rapporto di conversione risulta essere :
=
q 2
V eff .
π
sen
π
q
Nel caso particolare di raddrizzatori trifasi non controllati a gruppi di commutazione, risulta:
V Medio
=
3⋅ 2
π
V ef
sen
π
= 1 ,17
3
La tensione raddrizzata varia tra un valore massimo pari a V Max e un minimo V min pari a:
T
π
Vmin = V M cos ω
= V M cos
q
2q
Si definisce come fattore di ondulazione :
π
π
1 − cos
V Max − V Max cos
V Max − Vmin
π
π
π
q
q
r % = 100
= 100
= 100
= 100 ⋅ tg
π
π
q
2V Medio
2q
2q
2q
2 V Max sen
sen
π
q
q
Nel caso particolare di raddrizzatori trifasi non controllati a gruppi di commutazione, risulta:
r % = 100
π
⋅ tg
π
= 30 , 2%
6
6
La massima tensione inversa cui è sottoposto ciascun diodo corrisponde al valore massimo
della tensione concatenata; se q è pari, la tensione concatenata è uguale al doppio della tensione di
fase:
V Medio
V Max .inv . = V Max .conc . = 2V Max . fase = 2 ⋅ 2Veff . = 2 ⋅ 2
q 2
π
sen
q
π
V Max .inv . 2 π 1
=
per : q pari
π
V Medio
q
sen
q
Se q è dispari, la tensione concatenata risulta:
V conc . eff . = 2 ⋅ V eff . ⋅ sin
V Max . inv . = V Max . conc . =
π
q
2 ⋅ 2 V eff sin
π
q
= 2 2 sin
π
V Medio
q q 2
π
V Max . inv .
V Medio
=
sen
2π
q
Nel caso particolare di raddrizzatori trifasi non controllati a gruppi di commutazione, risulta:
V Max . inv . 2 π
=
= 2 , 09
3
V medio
80
π
q
La tensione all’uscita del raddrizzatore VR , scomposta nelle sue componenti in base allo
sviluppo in serie di Fourier, sarà costituita dalla somma di un termine costante di valore pari a VMedio
più delle armoniche sinusoidali di ampiezza decrescente delle quali la prima o fondamentale ha
frequenza pari q.f .-
6.2.2.
Raddrizzatori non controllati a ponte:
6.2.2.1.
Monofase :
Il raddrizzatore monofase non controllato a ponte presenta lo schema di figura (Ponte di
Greetz); durante il semiperiodo positivo della tensione d’ingresso v i diodi D 1 e D 3 risultano
polarizzati direttamente, mentre D 2 e D 4 sono interdetti: la corrente i entrerà nella resistenza di
carico R attraverso il morsetto A ; durante il semiperiodo negativo della tensione d’ingresso v i diodi
D 2 e D 4 risultano polarizzati direttamente, mentre D 1 e D 3 sono interdetti: la corrente i entrerà
nella resistenza di carico sempre per il medesimo morsetto A per cui la tensione V R ai capi della
resistenza di carico avrà l’andamento di figura, sarà cioè raddrizzata e pulsante.Il valore medio della tensione raddrizzata sarà:
T
V Medio
2V
22
= ∫ V M sen ωt ⋅ dt = M
T0
T
Il rapporto di conversione è:
V Medio
V eff
Il fattore di ondulazione risulta essere:
r % = 100
=
2 2
π
V M − Vmin
= 100
2 ⋅ V Medio
T
2π 2 2
2 2
T
=
=
−
cos
t
V
V
M
2 π
π eff
T 0 π
= 0 ,9
VM
π
= 100 ⋅ = 78,5%
2
4
2 ⋅ VM
π
La massima tensione inversa applicata a ciascun diodo quando è in fase di interdizione
risulterà pari al valore massimo della tensione alternata che si vuol raddrizzare:
81
V Max
π
= = 1 , 57
2 ⋅ V Max
V Media
2
π
La tensione all’uscita del raddrizzatore V R , scomposta nelle sue componenti in base allo
sviluppo in serie di Fourier, sarà costituita dalla somma di un termine costante di valore pari a V Media
più delle armoniche sinusoidali di ampiezza decrescente delle quali la fondamentale ha frequenza
pari a 2.f :
2
4
4
4
V R = V Max −
V Max cos 2ωt −
V Max cos 4ωt − ...... − 2
V Max cos kωt
(con k pari)
π
3π
15π
(k − 1)π
V Max . inv . = V Max .
V Max . inv .
⇒
=
6.2.2.2.
Trifase:
Il raddrizzatore non controllato a ponte trifase presenta lo schema di figura: esso è costituito
da due gruppi di commutazione che operano in opposizione di fase alimentati dalle medesime
tensioni di ingresso v1 , v2 , v3 , costituenti un sistema trifase simmetrico.Il gruppo di commutazione superiore, costituito dai diodi D1’ , D2’ , D3’ connessi a catodo
comune, fornisce rispetto al centro stella O la tensione VAO (come già visto nel paragrafo relativo ai
gruppi di commutazione polifasi) indicata in grossetto nella figura.Il gruppo di commutazione inferiore, costituito dai diodi D1” , D2” , D3” connessi ad anodo
comune, fornisce rispetto al centro stella O la tensione VBO che, a parità di altre condizioni risulta
opposta a quella del gruppo superiore .La tensione raddrizzata risultante applicata al carico sarà:
VR = VAO - VBO
Il calcolo analitico del valore istantaneo della tensione vR potrà essere fatto con riferimento ai
valori istantanei delle tre tensioni v1 , v2 , v3:
2π
2π
v1 = V M cos ωt
v 2 = V M cos ωt −
v 3 = V M cos ωt +
3
3
nell’intervallo compreso tra 0 e p/3 :
2π
v R = v1 − v 3 = V M cos ωt − V M cos ωt +
3
1
3
v R = V M cos ωt + cos ωt +
sinωt = V M 3
2
2
La tensione vR avrà valore minimo in t=0 pari a :
π
v R min = v R ( 0) = 3V M cos − =
6
82
3
1
cos ωt + sinωt = 3V M cos ωt −
2
2
3
V
2 M
π
6
e valore massimo pari a :
v R Max = 3 ⋅ V M
Il suo valore medio risulterà invece essere:
π
1 T6
v medio =
3V M cos ωt − dt
∫
T 0
6
6
T
6
=
T
3V M
ω
π 6 3
3 3
2π
sin T t − 6 = π 3 V M = π ⋅ 2 Veff
0
Per cui:
Vmedio 3 6
=
= 2 ,34
π
Veff
Mentre il fattore di ondulazione sarà:
3
−
3
V
V
M
V Max − Vmin
1
1
2 M
ru % = 100
= 100
= 50π −
= 7%
3
3 2 3
2 ⋅ Vmedio
2
3 VM
π
Quando il diodo D’1 è in stato di conduzione, il diodo D2’ risulta interdetto ed ha applicata ai
suoi morsetti la tensione massima inversa V Max . inv . . pari al valore massimo della tensione concatenata
v1 − v 2 :
V Max .inv . = 2 ⋅ 3 Veff = 6 Veff = 6
π
3 6
Vmedia =
π
V
3 media
V Max .inv . π
= = 1,05
Vmedia
3
La tensione all’uscita del raddrizzatore VR , scomposta nelle sue componenti in base allo
sviluppo in serie di Fourier, sarà costituita dalla somma di un termine costante di valore pari a V Media
più delle armoniche sinusoidali di ampiezza decrescente delle quali la fondamentale ha frequenza
pari a 6.f .-
Gruppi di commutazione
Monofase
Bifase
Trifase
Esafase
Dodecafase
Ponti
Monofase
Trifase
V medio
V Max . inv .
V eff
V medio
0,45
0,90
1,17
1,35
1,40
3,14
3,14
2,09
2,09
2,09
157
78,5
30,2
7
1,72
f
2f
3f
6f
12 f
0,90
2,34
1,57
1,05
78,5
7
2f
6f
83
ru % ffondamentale
6.2.3.
Raddrizzatori controllati a gruppi di commutazione:
Per ottenere la regolazione della tensione continua fornita dal gruppo raddrizzatore
bisogna sostituire i diodi con degli SCR (Tiristori) in modo da poter controllare gli istanti d’inizio del
periodo di conduzione dei diodi stessi.Il controllo della tensione d’uscita si ottiene semplicemente ritardando di un tempuscolo t
l’istante di accensione di ogni SCR rispetto all’istante naturale di commutazione (che sarebbe
l’istante in cui esso viene polarizzato positivamente cioè con la tensione anodica maggiore di quella
catodica).-
Fino a quando T 2 non riceve l’impulso di accensione (il che avverrà t secondi dopo l’istante
naturale di accensione) T 1 continua a condurre per cui la tensione del punto A segue l’andamento
della v1 ; nell’istante in cui T 2 viene posto in conduzione, A assume il potenziale di v2 che risulta
maggiore di v1 per cui T 1 , polarizzato inversamente, si spegne e così di seguito per gli altri tiristori.Come si vede dagli esempi grafici indicati di seguito, aumentando il valore del ritardo di
accensione t si ottengono per l’andamento della tensione d’uscita VR delle forme d’onda il cui
valore medio varia in funzione di t assumendo anche valori negativi; ma anche se ciò avviene la
corrente erogata potrà circolare soltanto nel verso che va dall’anodo al catodo cioè nel carico il verso
della corrente non può cambiare: il raddrizzatore è comunque unidirezionale.-
84
Il valore medio della tensione raddrizzata si ricava in funzione del ritardo di accensione t:
v1 = V M cos ωt
Vmedio
1
=
⋅
T
q
q VM
T ω
q VM
=
T ω
=
=
Indicando con:
q
2 Veff
π
µ = ω⋅τ
T
+τ
2q
−
T
q VM
∫T V M cos ωt ⋅ dt = T ω
2q
+τ
+τ
2π 2q
sen
t
T − T + τ
2q
π 2π τ
π 2π τ
− sen − +
sen +
T
T
q
q
2π τ
π
⋅ 2 sen ⋅ cos
q
T
π
⋅ sen ⋅ cos ω τ
q
angolo di parzializzazione
si ottiene l’espressione della tensione raddrizzata Vm in funzione di m :
Vµ =
Indicando con
V Medio =
2 ⋅q
π
Veff sen cos µ
π
q
2 ⋅q
π
Veff sen
q
π
il valore della tensione raddrizzata con
angolo di parzializzazione nullo
Vµ = V Medio ⋅ cos µ
Nel caso di raddrizzatori controllati trifasi con q = 3:
2 ⋅3
π
V Medio =
sen ⋅V eff = 1 ,17 ⋅ V eff
⇒
π
3
V µ = 1 ,17 ⋅ V eff ⋅ cos µ
Osservando l' andamento di Vµ si osserva che
per 0 ≤ µ ≤ π 2 la tensione fornita è positiva
e la corrente erogata sul carico è concorde
per cui la potenza viene trasferita dalla linea
al carico e quindi il convertitore funziona
realmente da raddrizzatore.Per π 2 ≤ µ ≤ π la tensione fornita e negativa
mentre la corrente mantiene il segno positivo per cui la potenza trasferita al carico risulta negativa,
cioè il carico si comporta da generatore e trasferisce potenza alla rete: il convertitore funziona così da
invertitore.-
6.2.4.
Raddrizzatori a ponte totalmente controllato:
Il circuito impiegato è identico a quello visto per i raddrizzatori a ponte non controllati
dove i diodi vengono sostituiti con degli SCR (tiristori) in modo da poter controllare gli istanti
d’inizio del periodo di conduzione dei diodi stessi.-
85
Il gruppo di commutazione superiore, costituito dai tiristori T1’ , T2’ e T3’ connessi a catodo
comune, fornisce, rispetto al centro stella O , una tensione controllata :
2q
2 ⋅3
π
π
3 6
Vµ1 =
Veff ⋅ sen ⋅ cos µ =
Veff ⋅ sen ⋅ cos µ =
V ⋅ cos µ
π
π
3
2 π eff
q
Il gruppo di commutazione inferiore, costituito dai tiristori T1” , T2” e T3” connessi ad anodo
comune, fornisce, rispetto al centro stella O , una tensione controllata :
2q
2 ⋅3
π
π
3 6
Vµ 2 = −
Veff ⋅ sen ⋅ cos µ = −
Veff ⋅ sen ⋅ cos µ = −
V ⋅ cos µ
π
π
q
3
2 π eff
Essendo i due gruppi alimentati dalla stessa tensione efficace e assumendo per entrambi il
medesimo valore dell’angolo di ritardo, le due tensioni controllate risulteranno uguali in modulo.La tensione d’uscita sarà:
2q
6
π
Vµ = Vµ1 − Vµ 2 = 2 ⋅
Veff ⋅ sen ⋅ cos µ = 3 Veff ⋅ cos µ = 2 ,34 ⋅ Veff ⋅ cos µ
q
π
π
Osservando l' andamento di Vµ si osserva che
per 0 ≤ µ ≤ π 2 la tensione fornita è positiva
e la corrente erogata sul carico è concorde
per cui la potenza viene trasferita dalla linea
al carico e quindi il convertitore funziona
realmente da raddrizzatore.Per π 2 ≤ µ ≤ π la tensione fornita e negativa
mentre la corrente mantiene il segno positivo per cui la potenza trasferita al carico risulta negativa,
cioè il carico si comporta da generatore e trasferisce potenza alla rete: il convertitore funziona così da
invertitore.Il vantaggio che il raddrizzatore controllato a ponte trifase presenta rispetto al gruppo di
commutazione trifase è quello di fornire in uscita una tensione raddrizzata che presenta sei impulsi
per periodo invece di tre, semplificando in tal modo il filtraggio delle armoniche; esiste in oltre la
possibilità di collegare direttamente il convertitore alla rete trifase senza neutro dal momento che la
tensione d’uscita viene prelevata direttamente dai morsetti A e B senza necessità di collegarsi al
neutro.-
86
Tenendo presente che la Veff che compare
nella espressione di Vµ è la tensione di fase,
indicando con Vc il valore efficace della
tensione concatenata, risulterà:
Vc = 3 ⋅Veff
Il ponte trifase totalmente controllato forni sce all' uscita una tensione che può variare
tra:
- 1,35 Vc ≤ Vµ ≤ 1,35 Vc
6.2.5.
Raddrizzatori a ponte semicontrollato:
Nel caso sia sufficiente un controllo della tensione soltanto per valori positivi tra
0 e 2 ⋅ V Media si può impiegare un ponte semicontrollato nel quale il gruppo di commutazione
superiore a catodo comune è costituito da tre o più SCR mentre il gruppo inferiore sarà costituito da
tre o più diodi non controllati.Il gruppo di commutazione superiore,
controllato, a catodo comune, fornirà una
tensione variabile in funzione dell'angolo
di parzializzazione µ :
π
q
Vµ1 = 2 Veff ⋅ sen ⋅ cos µ
π
q
Il gruppo di commutazione inferiore,
non controllato, ad anodo comune, fornirà
una tensione costante non regolabile pari a:
π
q
Vµ 2 = − 2 Veff ⋅ sen
π
q
La tensione totale sul carico risulterà:
q
3 Vc
π
π
Vµ = Vµ1 − Vµ 2 = 2 Veff sen ⋅ (1 + cos µ ) = 2
sen ⋅ (1 + cos µ ) = 0,675 Vc ⋅ (1 + cos µ )
q
π 3
3
π
Il ponte trifase semicontrollato fornirà alla
uscita una tensione sempre positiva com presa tra :
0 ≤ Vµ ≤ 1,35 Vc
87
6.2.6.
Raddrizzatori bidirezionali:
Tutti i tipi di raddrizzatori sino ad ora visti, a causa della unidirezionalità intrinseca dei
diodi e degli SCR, hanno in comune la proprietà di erogare la corrente in un’unica direzione anche
se in taluni può essere invertito il senso della tensione.Poichè per l’azionamento delle macchine in c.c. è di fondamentale importanza poter invertire
sia il senso della corrente che quello della tensione di alimentazione, risulta necessario avere a
disposizione dei raddrizzatori bidirezionali realizzati collegando in antiparallelo due raddrizzatori
controllati identici come nell’esempio di figura ove il carico è costituito da un motore in c.c. e
l’alimentazione da una rete in a.c. :
Nel caso venga utilizzato un convertitore bidirezionale a ponte trifase, lo schema è il seguente:
Esistono diversi modi per pilotare i due gruppi di SCR per ottenere l’inversione della corrente
senza generare cortocircuiti sulla linea trifase o la nascita di pericolose correnti di circolazione
all’interno dei due gruppi in presenza di possibili simultanee abilitazioni alla conduzione dei tiristori
dei due gruppi stessi; la più usata è quella di abilitare all’accensione soltanto un gruppo con un
opportuno angolo di parzializzazione in modo da ottenere la corrente Ip desiderata quando il gruppo N
è interdetto o la corrente In quando viene interdetto il gruppo P.- In questo caso il circuito prende il
nome di Convertitore a Selezione di Banco.-
6.3.0. Inverter
Gli Inverter o Convertitori d.c. - a.c.. sono dispositivi adatti ad eseguire la conversione da una
tensione continua d’ingresso ad una tensione alternata d’uscita che, in generale, deve poter essere
variata sia in ampiezza che in frequenza.Questi dispositivi vengono impiegati per l’azionamento di motori in c.a. ove sia richiesta
un’alimentazione variabile in ampiezza o frequenza o entrambe, per alimentare gruppi a continuità
garantita assoluta (ospedali, sale operatorie... ove, partendo da batterie di accumulatori di riserva, si
debbano alimentare apparecchiature funzionanti in a.c. ), per l’azionamento di forni ad induzione a
media frequenza ecc.-
88
6.3.1.
Inverter monofase a ponte intero (Full Bridge Inverter):
Il funzionamento di un inverter monofase può essere spiegato osservando il seguente
schema di principio ottenuto mediante quattro interruttori ideali:
Se T è il periodo della tensione alternata che si vuol ottenere, chiudendo per T/2 secondi i due
interruttori S1 ed S4 la tensione ai capi del carico sarà pari a Vi con la polarità positiva diretta verso A,
chiudendo nei successivi T/2 secondi gli interruttori S2 ed S3 la tensione ai capi del carico sarà ancora
pari a Vi ma con la polarità positiva diretta verso B .- Il carico risulta cosi alimentato con una
tensione alternata di forma rettangolare di periodo T e valore massimo pari a Vi .I comandi degli interruttori dovranno essere
studiati in modo che S1 ed S 3 come S 2 ed S 4
non possano essere mai chiusi contempora
neamente ad evitare un corto circuito del ge
neratore.Variando gli intervalli di apertura e chiu
sura degli interruttori in modo che risulti:
T
0 ⇔ t2 = t2 ⇔ t4 =
2
si ottiene una tensione alternata a frequenza
1
variabile :
f = /T
In pratica gli interruttori sono costituiti da Transistori bipolari di potenza mediante i quali si
può controllare l’interdizione della corrente anche in fase di polarizzazione diretta.In antiparallelo ai transistori sono posti dei diodi che hanno la funzione di offrire una via di
richiusura alla corrente di carico quando i relativi transistori sono interdetti, come meglio si vedrà in
seguito.-
89
Se il carico dell’inverter, come normalmente avviene, è ohmico-induttivo la corrente io avrà
andamento esponenziale crescente nell’intervallo to |---| t2 e decrescente nell’intervallo t2 |---| t4 con
L
costante di tempo t = /R ; poiché tale costante di tempo è normalmente molto inferiore al periodo
V
T
T, la corrente raggiungerà il suo valore massimo Io = i/R in un tempo inferiore a /2 ed avrà
l’andamento indicato in figura.Nell’intervallo t1 |---| t2 la corrente ha lo stesso verso della tensione ed essendo in tale
intervallo posti in conduzione i transistori T1 e T4 ed interdetti T2 e T3 la corrente fluirà normalmente
attraverso i transistori T1 e T4 .Nell’intervallo to |---| t1 la corrente ha segno contrario a quello della tensione per cui non può
fluire attraverso i due transistori T1 e T4 che in tale intervallo risultano in conduzione ne attraverso la
coppia T2 e T3 interdetta: dovrà passere attraverso i due diodi D1 e D4 .Analogamente nell’intervallo t2 |---| t3 la corrente dovrà passare attraverso i due diodi di
conduzione D2 e D3 mentre nell’intervallo t3 |---| t4 passerà attraverso i transistori T2 e T3 .Durante gli intervalli di tempo in cui la corrente passa attraverso i transistori, la tensione e la
corrente sono equiverse per cui si ha un trasferimento di energia dalla sorgente in continua al carico:
sono queste le fasi attive.- Durante gli intervalli di tempo in cui conducono i diodi, la tensione e la
corrente hanno verso contrario per cui l’energia va dal carico al generatore: sono queste le fasi di
recupero o rigenerative durante le quali l’induttanza restituisce al generatore l’energia ( Il carico
ohmico induttivo in corrente alternata scambia energia reattiva).L’onda di tensione che si ottiene non è sinusoidale bensì ad andamento rettangolare per cui
avrà un alto contenuto di armoniche di frequenza 3.f , 5.f, 7.f ecc. che porranno dei grossi problemi di
filtraggio, pena la non utilizzazione per carichi che necessitano di alimentazione il più possibile
sinusoidale.Una grandezza alternata ad andamento rettangolare avente valore medio nullo, valore
massimo V e pulsazione w = 2 .p. f si può, in base all’analisi di Fourier, scomporre nella somma di
infiniti termini sinusoidali:
4 ⋅V
1 4 ⋅V
1 4 ⋅V
1 4 ⋅V
sen ω t +
sen 3 ω t +
sen 5 ω t +
sen 7 ω t + ⋅ ⋅ ⋅ ⋅ ⋅ ⋅
π
3 π
5 π
7 π
Un altro inconveniente presentato da questo tipo di Inverter è che la fondamentale della
tensione alternata ottenuta ha valore efficace pari a ~ 0 , 9 V i per cui, assegnato un certo valore alla
tensione di alimentazione V i , la tensione applicata al carico V o può essere regolata in frequenza ma
non in valore efficace.-
6.3.2.
Inverter monofase a mezzo ponte ( Half-Bridge inverter):
L’inverter monofase a mezzo ponte, avendo lo schema di figura, ricalca nel funzionamento
quello a ponte intero; durante il primo mezzo periodo il transistor T1 risulta in conduzione e T2
v
interdetto per cui al carico è applicata la tensione i
con la polarità positiva verso A ; durante il
2
secondo mezzo periodo il transistor T1 risulta interdetto e T2 in conduzione per cui al carico è
v
applicata la tensione i
con la polarità positiva verso B.- Ai capi del carico viene così applicata
2
v
una tensione alternata ad andamento rettangolare avente periodo T e valore massimo i .- Per
2
evitare il corto circuito dei generatori bisogna fare in modo da non porre contemporaneamente in
conduzione i due transistori.-
90
Anche nell’Inverter a mezzo ponte i due diodi hanno la funzione di permettere la richiusura
della corrente negli intervalli nei quali essa ha segno contrario alla tensione ( Fasi di recupero):
Nell’intervallo to -- t1 conduce D1 ; la corrente va B verso A ; T2 è interdetto
Nell’intervallo t1 -- t2 conduce T1 e T2 è interdetto ; la corrente va da A verso B
Nell’intervallo t2 -- t3 conduce D2 ; la corrente va da A verso B ; T1 è interdetto
Nell’intervallo t3 -- t4 conduce T2 e T1 è interdetto ; la corrente va da B verso A
La forma d’onda dell’Inverter a mezzo ponte è uguale a quella dell’Inverter a ponte intero
v
v
= v i fornisce all’uscita una tensione
soltanto che a parità di tensione totale d’ingresso : i + i
2
2
uguale alla metà di quella fornita dal ponte intero per cui, a parità di altre condizione, eroga una
potenza pari alla metà di quella fornibile da un inverter a ponte intero.- Questo tipo di circuito trova
vasta applicazione nei sistemi trifasi.-
6.3.3.
Inverter monofase in Push-pull:
Questo Inverter richiede sempre per il suo funzionamento un trasformatore monofase con il
primario a presa centrale, come risulta dallo schema di figura:
Per il buon funzionamento dell' inverter
è indispensabile che le due metà dell' av
volgimento primario siano perfettamente
simmetriche ed accoppiate con il seconda
rio; in tal caso quando il circuito di co
mando dei transistori pone in conduzione
T1 e in blocco T2 la tensione Vi è applica
ta alla metà inferiore del primario per cui
al secondario nasce la tensione:
N2
Vu = Vi
N1
Quando nel semiperiodo successivo il transistore T 2 viene posto in conduzione e T 1 in blocco
la tensione V i è applicata alla metà superiore dell’avvolgimento primario per cui al secondario si
genera una tensione:
N2
Vu = Vi
N1
che, per la simmetria degli avvolgimenti, e uguale in modulo alla precedente ma opposta di verso.- Si
ottiene in tal modo sul carico un’onda di tensione alternata identica a quella vista nei casi precedenti;
il circuito presenta un notevole pregio rispetto ai circuiti a ponte e a mezzo ponte e cioè il perfetto
91
isolamento tra il generatore d’ingresso ed il carico in uscita.- Un altro vantaggio del circuito è che gli
emettitori dei due transistori sono equipotenziali (sono entrambi collegati a O) per cui le basi di
controllo risultano riferite al medesimo potenziale rendendo così molto più semplice, dal punto di
vista circuitale, il filtraggio e l’isolamento.- Come conseguenza della difficoltà di costruire
trasformatori a presa centrale con un adeguato accoppiamento magnetico tra i due semi avvolgimenti
primari per potenze medio-elevate, il circuito viene normalmente utilizzato soltanto per potenze fino
ad alcuni kW; per potenze superiori si preferisce la configurazione a ponte intero, mentre la
configurazione a mezzo ponte viene usata per gli inverter trifasi.-
6.3.4.
Inverter trifase a ponte intero:
L’inverter trifase a ponte intero è realizzata collegando tre identici inverter monofasi sempre a
ponte intero in modo tale da poter essere alimentati dalla medesima tensione continua; il carico di
ciascun inverter è costituito dalla fase primaria di un trasformatore trifase il cui secondario, collegato
a stella , alimenta a sua volta il carico; la presenza del trasformatore è legata alla necessità di evitare
dei corto circuiti sui morsetti di alimentazione attraverso i collegamenti a stella o a triangolo del
carico.- Le basi dei tre gruppi di transistori che sostituiscono gli interruttori nel circuito reale
vengono gestite con uno sfasamento di: 0° - 120° - 240° in modo che le tre tensioni alternate in
uscita dell’inverter risultino sfasate di un terzo di periodo così da costituire un sistema trifase
simmetrico.
La presenza del trasformatore
impedisce l' impiego del cir cuito negli azionamenti a fre quenza varibile.- Questo tipo
di inverter trifase trova nor malmente impiego nei gruppi
statici di continuità assoluta
(Ospedali).-
6.3.5.
Inverter trifase a mezzo ponte:
Questo tipo di inverter è molto più diffuso
del precedente in quanto non richiede l' impiego
del trasformatore, potendosi collegare il carico
direttamente ai tre morsetti d' uscita.Le basi dei tre gruppi di Transistori vengono
gestite con uno sfasamento di:
0° - 120° - 240°
in modo da ottenere in uscita dell'inverter tre
tensioni:
vA
vB
vC
sfasate tra loro di un terzo di periodo.Sostituendo agli interruttori ideali S dei transistori di potenza con in antiparallelo i relativi
diodi di libera circolazione e tenendo presente che normalmente il carico non necessita di essere
92
collegato al neutro per cui il punto di mezzo dell’alimentazione puoi essere eliminato, il circuito
diventa:
Se il carico dell’inverter è di tipo ohmico-induttivo (come normalmente avviene) e con
collegamento a stella equilibrata, la tensione del centro stella vo può essere calcolata facendo
riferimento alle tensioni di fase v1 , v2 , v3 applicate alle singole fasi del carico:
di1
v1 = v A − v o = R ⋅ i1 + L dt
di 2
v 2 = v B − v o = R ⋅ i 2 + L
dt
di
v = v − v = R ⋅ i + L 3
3
C
o
3
dt
e sommando membro a membro:
di
di
di 3
1
2
v A + v B + v C − 3 ⋅ v o = R ⋅ (i1 + i 2 + i 3 ) + L ⋅
+
+
dt
dt
dt
Ma essendo il carico collegato a stella senza neutro risulterà:
di1 di 2 di3
i1 + i 2 + i 3 = 0
da cui segue:
+
+
=0
per cui:
dt
dt
dt
v + v B + vC
v A + v B + vC − 3 ⋅ vo = 0
⇒
v0 = A
3
Essendo le tre tensioni vA , vB , vC ad andamento rettangolare, con frequenza f e sfasate tra di
loro di un terzo di periodo, la tensione vo, con andamento pari a quello indicato in figura, avrà valore
massimo uguale ad un terzo delle vA , vB , vC e frequenza 3.f.- La tensione v1 si ricava quindi come
differenza tra vA e vo ed avrà l’andamento tipico dell’onda a sei gradini indicata in figura.- Le tensioni
v2 e v3 avranno il medesimo andamento della v1 con uno sfasamento di un terzo di periodo.Come conseguenza della presenza di un carico ohmico-induttivo con costante di tempo
To = L
normalmente inferiore a T , la corrente i i avrà, in corrispondenza di ciascun gradino
R
6
93
della tensione, un andamento esponenziale assumendo globalmente la caratteristica forma a “cresta
di gallo”.Tutti i circuiti visti permettono di variare la frequenza della tensione alternata in uscita
dell’inverter ma non il suo valore efficace .Per variare il valore della tensione in uscita esistono due possibilità: Regolare la tensione
continua di ingresso o modificare la tecnica di controllo dei transistori di potenza.La via più semplice è la prima: partendo dalla tensione alternata di rete, impiegare un
raddrizzatore controllato che fornisca una tensione continua variabile con la quale alimentare un
inverter in modo da ottenere una tensione alternata variabile sia in ampiezza che in frequenza.Questo sistema non può venire però impiegato negli azionamenti ove sia richiesta una
variazione rapida delle grandezze in uscita a causa della presenza dei condensatori di grande capacità
posti a valle dei raddrizzatori per il filtraggio delle armoniche.Il secondo sistema sfrutta invece la possibilità di controllare i transistor di potenza in modo di
avere più aperture e chiusure del circuito nel medesimo semiperiodo così da variare il valore efficace
della tensione alternata in uscita.-
6.4.0.
Regolatori
I Regolatori o Convertitori a.c. - a.c. sono dispositivi atti a trasformare la tensione alternata
avente un certo valore efficace e frequenza in un’altra tensione sempre alternata ma di valore efficace
ed eventualmente anche frequenza diverse.Nel caso più generale in cui si necessiti di avere in uscita una tensione alternata variabile sia
in ampiezza che, soprattutto in frequenza, si impiegano i Sincroconvertitori : dispositivi costituiti da
un Raddrizzatore controllato che trasforma la tensione alternata di rete in una tensione continua di
valore variabile (eventualmente bidirezionale se è richiesta l’inversione del senso dell’ energia)
oppure non controllato se è richiesta soltanto la variazione della frequenza e non del valore efficace
dell’alternata, seguito in cascata da un Inverter che alimenterà il carico a frequenza variabile.Nel caso invece si richieda soltanto una regolazione del valore efficace della tensione e non
della frequenza come nel campo delle regolazioni termiche , luminose e di piccolo motori universali,
trova largo impiego il Regolatore di a.c. costituito fondamentalmente da due tiristori collegati in
antiparallelo più i circuiti di controllo.Nel caso più semplice di carico
puramente resistivo, con la cor rente in fase con la tensione al ternata applicata, se al posto dei
due tiristori ci fossero due diodi,
la corrente sul carico avrebbe an
damento sinusoidale in quanto i
due diodi sarebbero alternativa mente posti in conduzione : il
diodo 1 durante la semionda po sitiva ed il 2 durante la negativa.-
In presenza dei Tiristori, regolando il ritardo t del tempo di innesco, si regola l’istante
d’inizio del passaggio della corrente sia positiva che negativa alternativamente attraverso i due
tiristori per cui la corrente sul carico ohmico avrà l’andamento indicato in figura.-
94
Negli intervalli di tempo t durante i quali i tiristori sono interdetti, la tensione di
alimentazione cadrà interamente su di essi mentre sul carico sarà nulla.- Variando il tempo d’innesco
t rispetto il naturale istante di commutazione dei tiristori, si parzializza la tensione ai capi del carico
riducendo così il valore efficace della corrente assorbita.Nel caso di carico Ohmico - induttivo, essendo la corrente in ritardo sulla tensione, le forme
d’onda risultano più complesse e l’annullamento della corrente risulta posticipato rispetto
l’azzeramento della tensione, pur rimanendo invariata la possibilità di regolazione del valore efficace
della corrente in funzione dell’angolo di parzializzazione.Nel caso di applicazioni trifasi, è sufficiente collegare tre coppie di tiristori in antiparallelo,
una per ciascuna fase, sfasando opportunamente gli impulsi di Gate.-
95
Capitolo VII
AZIONAMENTI INDUSTRIALI
7.1.0. Generalità
Per azionamento industriale si intende quell’insieme di apparecchiature elettromeccaniche che
sono atte a trasformare l’energia elettrica fornita da un distributore (ENEL) in una motorizzazione o
azionamento di un dispositivo meccanico del tipo più vario.-
In base alle necessità della Macchina Azionata (Potenza, copia, velocità e loro campo di
regolazione, condizioni di impiego ecc.) si sceglie un opportuno tipo di Motore Elettrico in grado di
fornire la potenza, copia e velocità richieste.In base al tipo di Sorgente di Energia Elettrica disponibile e al tipo di Motore elettrico
necessario e alle Regolazioni a lui richieste dall’utenza, si scelgono i circuiti adatti a collegare la
Sorgente di energia elettrica al motore.Agli inizi della tecnica degli azionanti elettrici, la tendenza era quella di eseguire
l’azionamento di tutta l’officina con un unico grande motore (impianti elettrici concentrati perché
pericolosi e inaffidabili) per poi distribuire la potenza meccanica mediante linee di distribuzione
meccaniche dalle quali, mediante cinghie, pulegge ed ingranaggi, veniva derivata alle singole
macchine operatrici.Il grado di sicurezza ed affidabilità raggiunti attualmente negli impianti elettrici e la
possibilità di ottenere regolazioni elettroniche ottimali differenziate a seconda delle esigenze delle
singole macchine operatrici hanno spinto verso l’installazione di più motori di minore potenza, adatti
alle singole utenze all’interno o nelle immediate vicinanze delle utenze stesse.-
7.2.0. Struttura generale di un azionamento
L’azionamento è l’insieme di componenti elettromeccanici ed elettronici che consente la
trasformazione di energia elettrica in energia meccanica avente coppia, velocità e posizione
controllabili secondo un certo programma.L’azionamento va considerato come un insieme di elementi interagenti in modo automatico:
96
-- Motore elettrico: Trasforma l’energia elettrica fornita dal convertitore statico in energia
meccanica: è cioè l’Attuatore di potenza.- Talvolta il motore incorpora un trasduttore di velocità o
di posizione.-- Convertitore statico: Fornisce l’energia elettrica al motore elettrico prelevandola dalla rete
di distribuzione e convertendola in maniera opportuna .- L’alimentazione può essere in corrente
alternata o continua a seconda del tipo di distribuzione.- L’uscita del convertitore può essere in
corrente continua ad ampiezza costante o variabile, in corrente alternata a frequenza ed ampiezza
costanti o variabili: variando questi parametri il motore è forzato a seguire le istruzioni di velocità,
accelerazione e posizione fornite via via dall’elaboratore che costituisce il sistema di controllo.- Il
convertitore deve avere un Sistema di protezioni : la fondamentale è quella di Massima corrente.--Dispositivo di controllo: Può essere analogico, digitale, a microprocessori ed attua la
strategia di controllo delle grandezze di comando del convertitore in base alle richieste del sistema e
le leggi di controllo preimpostate.Il dispositivo di controllo è costituito da:
1. Generatore di riferimento che fissa in ogni istante il valore della grandezza di comando.
2. Blocco di misura comprendente i trasduttori della grandezze elettriche e meccaniche provenienti
da tutto il sistema ed esegue la loro elaborazione che invia al blocco legge di controllo.
3. Blocco legge di controllo riceve i valori misurati, li confronta con quelli del generatore di
riferimento e, in base alle esigenze stabilite dalla strategia di controllo, invia al
convertitore gli impulsi necessari affinché quest’ultimo fornisca al motore la tensione e
corrente necessarie ad attuare l’azionamento voluto.La legge di controllo deve permettere di raggiungere le condizioni di funzionamento
desiderate sia in regime transitorio che permanente.- A tale scopo si può ricorrere ai sistemi a
catena aperta, nel caso di azionamenti con regimi prevalentemente stazionari aventi momenti
d’inerzia e transitori trascurabili, altrimenti a sistemi a catena chiusa.-
97
7.2.1.
Sistemi di controllo a catena aperta:
Sono sistemi nei quali l’azione di controllo è indipendente dall’uscita.- Poichè in questi
sistemi non è previsto alcun confronto tra la grandezza d’uscita e quella desiderata, si possono
verificare notevoli variazioni all’uscita senza che vengano corrette.L’esempio seguente mostra un sistema di controllo a catena aperta ove, variando la Tensione
di riferimento V R l’alimentatore varia la corrente di eccitazione della dinamo e quindi la tensione di
alimentazione del motore V M per cui, a parità di coppia frenante, varia la velocità del motore Ω M .-
Le equazioni di funzionamento del motore sono:
V M − E = R i I M
TU
⇒
V M − k ⋅Φ ⋅Ω M = R i
E = k ⋅Φ ⋅Ω M
k 1 ⋅Φ
T = k ⋅Φ ⋅ I
1
M
U
ΩM =
VM
−
Ri
⋅ TU
k ⋅Φ kk 1 ⋅Φ 2
Poichè la velocità del motore dipende dal valore della coppia frenante, dal flusso di
eccitazione del motore, dalla tensione delle dinamo che, a sua volta, dipende dalla velocità del
motore asincrono oltre che dalla corrente di eccitazione della dinamo stessa, una qualsiasi azione di
disturbo su uno di tali parametri può far variare la velocità del motore Ω M in modo indesiderato a
prescindere dalla variazione voluta che si ottiene agendo su V R .La rappresentazione a blocchi di questo sistema può essere la seguente:
Il rapporto tra la grandezza in uscita e quella in ingresso, prende il nome di Funzione di
trasferimento
G=
Uscita ( t )
⇒
Ingresso ( t )
98
Ω ( t )= G⋅vr ( t )
7.2.2.
Sistemi di controllo a catena chiusa:
Se nel sistema di controlla a catena aperta visto al punto precedente si inserisce
sull’asse del motore una Dinamo tachimetrica e s’invia la sua tensione d’uscita V b (proporzionale
alla velocità Ω M del motore) all’ingresso, chiudendo l’anello di controllo in modo che
all’alimentatore A risulti applicata la tensione:
V d = V R −Vb
si realizza una retroazione negativa a sistema di controlla a catena chiusa.-
Se la velocità del motore Ω M aumenta per un qualsiasi motivo, la tensione V b fornita dalla
dinamo tachimetrica aumenta per cui la tensione V d = V R − V b applicata all’amplificatore
diminuisce determinando la riduzione della corrente di eccitazione della dinamo e della tensione
V M applicata al motore con la conseguenza di ridurre la velocità del motore riconducendola al valore
iniziale legato al valore della tensione di regolazione V R .La rappresentazione a blocchi di questo sistema è:
µd = µr − µb
99
7.3.0. Espressione analitica della risposta di un sistema a catena chiusa
Dato un sistema avente funzione di trasferimento G , si inserisca una reazione negativa H
u = G ⋅ε
b = H ⋅u
ε = r − b
u = G ⋅ε = G ⋅ (r − b ) = G ⋅ r − G ⋅b = G ⋅ r − G ⋅ H ⋅u
u ⋅ (1 + G ⋅ H ) = G ⋅ r
G
u=
⋅r
1+ G ⋅ H
E’ questa l’espressione generale che fornisce l’uscita u in funzione dell’ingresso r di un
Sistema controllato a reazione negativa.- La Funzione di trasferimento equivalente vale:
Ge =
G
1+ G ⋅ H
Se il prodotto G.H (guadagno ad anello aperto) è molto grande, risulta:
G
G
1
⋅r ≈
u=
⋅r ≈ ⋅r
1+ G ⋅ H
G⋅H
H
per cui il segnale d’uscita non risente di eventuali variazioni di G (legato a molti elementi :
Alimentatore, Convertitore, Motore e loro alimentazioni) ma soltanto di quelle di H costituito
generalmente da un solo elemento che deve essere scelto accuratamente.Esempio :
Le funzioni di trasferimento siano:
Amplificatore - Dinamo
V
A = 200
V
Motore:
giri
min
M =5
V
Dinamo Tachimetrica:
V
H = 0,1
giri
min
g
G = A ⋅ M = 1000
min
⇒
Ge =
G
=
1000
g
= 9 , 90099
1 + G ⋅ H 1 + 1000 ⋅ 0 ,1
V
Applicando una tensione di regolazione v r = 50 ,5V la velocità del motore risulterà:
100
min
V
n = G e ⋅ v r = 9 ,90099 ⋅ 50 ,5 = 500 g
min
Se, per la presenza di un qualsiasi disturbo, il valore di G varia dell’1% passando a:
g
min
la presenza della reazione negativa fa si che la
G = 1010
V
velocità passi al valore di:
1010
n=
⋅ 50 ,5 = 500 , 049 g
min
1 + 1010 ⋅ 0 ,1
con una variazione percentuale:
500 , 049 − 500
∆ n % = 100 ⋅
= 0 , 0098%
500
Il sistema a catena chiusa conferisce al sistema una costanza del guadagno complessivo se
G.H>>1
In definitiva l’Azionamento a catena aperta si adotta quando le caratteristiche del gruppo
Amplificatore-Alimentazione-Convertitore-Motore sono sufficientemente stabili e affidabili da
consentire, a regime, una precisione (scostamento nel tempo tra velocità, coppia, posizione desiderate
e quelle ottenute) nei limiti voluti.In caso contrario si ricorre ad un Azionamento a catena chiusa nel quale in ogni istante la
grandezza di controllo del convertitore è calcolata in base al confronto tra il segnale di riferimento e
quello proveniente dal trasduttore che legge il valore della grandezza in uscita.-
101
Esempio di azionamento di un motore a c.c. con controllo di Coppia, Velocità, Posizione
Nel caso più generale nel quale l’azionamento preveda un controllo completo del moto : e
cioè di posizione, velocità e copia saranno necessari tre distinti anelli di reazione:
Il posizionamento dell’organo controllato è primario rispetto agli altri e quindi è il più
esterno: Il riferimento di posizione R p viene confrontato con il segnale f fornito dal Trasduttore di
posizione T p e fornisce l’errore di posizione ε p che, amplificato dall’Amplificatore di posizione
A p comanda gli stadi successivi.-
La velocità ha come segnale di riferimento R v fornito dall’amplificatore di posizione A p e
viene confrontato con il segnale Ω fornito dal Trasduttore di velocità T v , si ottiene così l’errore di
velocità ε v che contiene anche l’errore di posizione fornito da A p assieme ad R v ; l’errore di velocità
ε v , amplificato dall’Amplificatore di velocità A v comanda lo stadio successivo del controllo di
corrente.Essendo la coppia T all’asse del motore proporzionale alla corrente assorbita :
T = k ⋅Φ ⋅ I
il controllo di tale corrente fornisce il controllo di coppia I che, confrontato con il segnale di
riferimento R I , determina l’errore di coppia ε I contenete anche l’errore di velocità e di posizione
forniti dagli stadi precedenti ; l’errore ε I , amplificato dall’Amplificatore di coppia A I , fornisce il
segnale di riferimento V C per il controllo dei Comandi del Convertitore.
Il circuiti di Comando del convertitore controllano gli SCR del Convertitore che, alimentato
da una rete trifase, fornisce la potenza al Motore, controllato ad una tensione opportuna.-
Esempio di azionamento avente
soltanto il controllo di posizione
102
7.4.0. Azionamenti con motori a corrente continua
Negli azionamenti a corrente continua si usano prevalentemente Motori a corrente continua
con eccitazione separata in quanto consentono un’ampia regolazione della velocità agendo sia sulla
tensione di alimentazione che sulla corrente di eccitazione separatamente o in combinazione.Poiché la sorgente di alimentazione che si ha normalmente a disposizione è una rete in
corrente alternata trifase, il problema della generazione di una tensione continua di ampiezza
variabile necessaria per la variazione della velocità viene risolto con l’impiego di Raddrizzatori
controllati che usano diodi, tiristori e transistori di potenza.Equazione del Motore a corrente continua con eccitazione separata:
Dalla teoria dei motori in corrente continua si ottengono le seguenti equazioni che forniscono:
1° La velocità del motore (W)
V − Ri I
E
V
Ω=
=
≈
che, trascurando la caduta interna
k ⋅Φ
k ⋅Φ
k ⋅Φ
rispetto la tensione di alimentazione, risulta direttamente proporzionale alla tensione applicata ed
inversamente proporzionale al flusso di eccitazione
2° La coppia generata (T)
T = k 1 ⋅Φ ⋅ I
che e proporzionale al flusso di eccitazione
e alla corrente assorbita.----- Se la variazione di velocità è ottenuta mantenendo il flusso costante e variando la
tensione, la coppia motrice potrà, se richiesta dal carico, corrispondere alla massima nominale a tutte
le velocità determinando una relativa variazione della potenza assorbita:
----- Se la variazione della velocità è ottenuta mantenendo costante la tensione e variando il
flusso, la coppia massima ottenibile alle varie velocità risulterà:
Vn I n
1
=k
cioè inversamente proporzionale alla velocità
T=
Ω
Ω
essendo la potenza costante.----- In molte applicazioni si attua la regolazione mista cioè a Flusso costante sino a
raggiungere la potenza nominale per poi lavorare a Tensione costante.-
7.4.1.
Caratteristiche dei Convertitori per gli azionamenti dei motori a c.c.:
Per l’azionamento di motori di piccola potenza possono essere impiegati convertitori
monofasi, altrimenti vengono normalmente usati gruppi di commutazione controllati, ponti
semicontrollati o totalmente controllati trifasi che forniscono una tensione più livellata.- A seconda
103
delle necessità i convertitori possono essere unidirezionali o bidirezionali , di tipo rigenerativo
reversibile se l’energia deve fluire nei due sensi dalla corrente alternata alla continua e viceversa o
non rigenerativo se l’energia fluisce soltanto nel senso dalla alternata alla continua.-
7.4.1.1.
Convertitori unidirezionali:
a. Non rigenerativi nei quali la corrente può circolare in un solo senso, essendo i
tiristori ed i diodi unidirezionali, e forniscono tensione continua con un’unica polarità (raddrizzatori a
ponte semicontrollati) : il motore azionato può avere un unico senso di rotazione e non può essere
usato come freno elettrico a recupero di energia.-
b. Rigenerativi nei quali la corrente non si può invertire in quanto i tiristori sono
unidirezionali, però è possibile invertire la polarità della tensione continua (rendendo maggiore di 90°
l’angolo d’innesco degli SCR) : il motore, invertendo il segno della tensione di alimentazione, inverte
il senso di rotazione diventando un generatore, funzionando così da freno a recupero di energia.-
A questa soluzione si ricorre nel caso di alimentazione di motori per montacarichi: la
macchina, quando fa salire il carico, funziona da motore con E<V e sviluppa una coppia motrice T m
con un certo senso di rotazione; quando il carico, scendendo, fa girare la macchina in senso contrario,
la E si inverte e risulta E>V per cui bisogna invertire contemporaneamente il senso della tensione di
alimentazione, rendendo maggiore di 90° l’angolo di innesco degli SCR, per cui la corrente erogata
dalla macchina, divenuta generatore, mantiene il medesimo verso e la coppia sviluppata, che diventa
frenante, mantiene pure il medesimo verso; la macchina in tal modo restituisce dell’energia alla rete.-
104
7.4.1.2.
Convertitori bidirezionali:
I convertitori bidirezionali sono costituiti da due ponti trifasi totalmente controllati e collegati
fra loro in antiparallelo; questo tipo di collegamento, permettendo di invertire sia la tensione che la
corrente nella macchina, consente il funzionamento dell’azionamento sia come motore che come
generatore (freno a ricupero) in entrambi i sensi di rotazione.- Il segnale d’errore e, ottenuto dalla
comparazione del segnale di riferimento con quello fornito dalla dinamo freno, opportunamente
amplificato dalla sezione di controllo, comanda il generatore di impulsi che fornisce i segnali alle
porte dei tiristori .- Nella logica del generatore di impulsi deve essere inserita l’impossibilità di
abilitare contemporaneamente i due ponti per evitare cortocircuiti .-
In questo tipo di azionamento il circuito di eccitazione è alimentato da un convertitore
unidirezionale; l’inversione del senso di rotazione è ottenuto invertendo la corrente di alimentazione;
normalmente il tempo di commutazione è dell’ordine della decine di millisecondi.-
Alternativamente si può impiegare un convertitore bidirezionale per alimentare il circuito di
eccitazione permettendo così di invertire la corrente di eccitazione e di conseguenza il senso di
rotazione, mentre l’indotto risulta alimentato da un convertitore unidirezionale; a causa della
notevole costante di tempo del circuito di eccitazione, il tempo di inversione risulta dell’ordine dei
secondi.-
105
7.5.0.
Azionamenti con motori asincroni:
Gli azionamenti a velocità controllata fatti mediante motori asincroni sono preferiti a quelli
con motori in corrente continua per la semplicità, robustezza e minor costo del motore stesso.L’alimentazione del motore viene fatta dalla rete in corrente alternata mediante un gruppo
Raddrizzatore controllato - Inverter che permette di variare con continuità la tensione alternata sia in
ampiezza che frequenza.La variazione della velocità di un Motore asincrono può essere ottenuta in generale:
-- Per variazione del numero di poli
--Con resistenze rotoriche
--Con variazione controllata dell’ampiezza e della frequenza della tensione di alimentazione
--Con altri sistemi non oggetto di approfondimento nel corso (con cicloconvertitori, a corrente
impressa, a controllo dell’orientamento di campo, con controllo della potenza trasmessa
al rotore)
7.5.1.
Modello circuitale e relazioni fondamentali del motore asincrono:
Per le analisi che seguiranno si farà uso di un circuito equivalente semplificato del Motore
asincrono. La semplificazione introdotta consiste nel trascurare le perdite nel ferro statoriche e nello
spostare la reattanza X o a monte dell’impedenza equivalente primaria (si trascurano in tal modo le
cadute primarie dovute alla corrente a vuoto):
Le relazioni fondamentali che regolano il funzionamento del motore asincrono sono:
-- Velocità di sincronismo:
60 f 1
n1 =
p
--Velocità rotorica:
60 f 1
(1 − s )
n 2 = n 1 (1 − s ) =
p
--F.E.M. indotte nello statore e nel rotore:
E 1 = k 1 f 1Φ
E 2 (1 ) = k 2 f 1 Φ
--Corrente rotorica:
E 2 (1)
I 2 ( s) =
2
R2
+ X 22 (1)
s
--Potenza sincrona o trasmessa al rotore:
Pt = Tgen Ω 1 = 3E 2 (1) ⋅ I 2 ( s) ⋅ cos ϕ 2
106
--Coppia sincrona o generata:
P
3 E 2 (1 ) ⋅ I 2 ( s ) ⋅ cos ϕ 2
=
T gen = t =
2 πf 1
Ω1
p
=
p
2 πf 1
3 k 2 f 1 ⋅ Φ ⋅ I 2 ( s ) ⋅ cos ϕ 2 = k ⋅ Φ ⋅ I 2 ( s ) ⋅ cos ϕ 2
o anche:
Tg =
Pt
Ω1
=
3 R 2 I 22 ( s )
p
2π f 1
s
=
3 p V 12
2π f 1 m
2
1
R2
sX 22 ( 1 )
+
s
R2
nel tratto di normale funzionamento come motore o generatore lo scorrimento è molto piccolo
(-0,05 < s < 0,05) per cui:
R2
sX 22 (1)
>>
s
R2
e quindi:
Tg ≈
3 p V 12 s
2π f 1 m 2 R 2
--Coppia massima:
T Max =
3 p V 12
1
2 π f 1 m 2 2 X 2 (1 )
--Scorrimento di coppia massima:
R2
sM =
X 2 (1)
--Coppia di avviamento:
R2
3 p V 12
T avv =
2 π f 1 m 2 R 22 + X 22 ( 1 )
--Caratteristica meccanica completa della macchina asincrona T ( n 2 ) :
T
Motore
n 1 frenatura
0
freno a recupero
n1
in controcorrente
107
2n 1
n2
7.5.2.
Variazione della velocità per commutazione del numero dei poli:
Dalla relazione che fornisce la velocità angolare del motore:
2π f 1
( 1− s )
n2 = n1 ( 1 − s ) =
p
si evince che variando il numero dei poli dell’avvolgimento rotorico (con il rotore del tipo a gabbia)
si possono ottenere, a parità di carico, un numero limitato di diverse velocità.-Commutando i poli da 2 a 4 oppure da 4 a 8 si ottengono due velocità in rapporto tra loro 1:2
-Commutando i poli da 4 a 6 si ottengono due velocità in rapporto tra loro 1 : 1,5
-Commutando i poli da 6 a 8 si ottengono due velocità in rapporto tra loro 1 : 1,33
-Commutando i poli da 2 a 4 a 6 si ottengono tre velocità in rapporto tra loro 1 : 2 : 3
-Commutando i poli da 2 a 4 a 8 si ottengono tre velocità in rapporto tra loro 1 : 2 : 4
-Commutando i poli da 4 a 6 a 8 si ottengono tre velocità in rapporto tra loro 1 : 1.5 : 2
Motori a due velocità vengono costruiti per potenze dell’ordine di alcune centinaia di kW,
mentre motori a tre velocità vengono costruiti per potenze dell’ordine di decine di kW.Per lo stesso motore, la potenza e al coppia asse alle varie velocità non risultano proporzionali
alla velocità selezionata; nella scelta del motore bisogna far riferimento ai dati specifici di targa della
singola macchina.7.5.3.
Variazione della velocità per inserzione di resistenze rotoriche:
Questo tipo di regolazione è riservata ai motori con rotore avvolto.- Inserendo una
resistenza in serie all’avvolgimento di rotore , la coppia massima rimane costante:
3 p V 12
1
T Max =
2
2 π f 1 m 2 X 2 (1 )
mentre la coppia di avviamento aumenta:
R2
3 p V 12
T avv =
2 π f 1 m 2 R 22 + X 22 ( 1 )
caratteristiche meccaniche del tipo di figura:
si ottiene così una famiglia di
Tm
R2'''
R 2''' > R 2'' > R 2' > R 2
R2''
T u : coppia resistente
R2'
Tu
R2
n2
si può notare come, a parità di coppia resistente all’asse, inserendo una resistenza rotorica, la velocità
diminuisce.- L’entità della variazione è legata al valore della coppia frenante per cui si necessita di
dispositivi di stabilizzazione della velocità.Essendo la riduzione di velocità ottenuta con l’aumento di resistenza si ha l’inconveniente di
un aumento di perdite per effetto Joule e quindi una riduzione del rendimento.-
108
7.5.4.
Variazione della velocità mediante il controllo della tensione di
alimentazione:
Questo tipo di variazione viene normalmente impiegato nei motori con rotore in corto.Analizzando l’andamento delle caratteristiche meccaniche, si può notare che la coppia massima e la
coppia di avviamento sono legate al quadrato della tensione di alimentazione mentre il valore dello
scorrimento al quale si ha la coppia massima è indipendente dalla tensione:
2
2
R2
R2
R2
3 V1
1
3 V1
T Max =
T avv =
s∗ =
=
X 2 ( 1 ) 2π f 1 L 2
m 2 Ω 1 2 X 2 (1 )
m 2 Ω 1 R 22 + X 22 (1 )
Una famiglia di caratteristiche meccaniche ottenute a diversi valori della tensione di
alimentazione si presenterà come in figura:
Tm
TMax
Tu
V 1'
T avv
V 1 ''
V 1 '''
n2
n2M
La variazione della tensione V1 di alimentazione non altera la velocità a vuoto W1 ma, a parità
di coppia resistente, diminuisce la velocità all’asse: W2.- La variazione che si ottiene è continua ma
la sua entità non supera il 10 % .- Riducendo la tensione, il tratto stabile della caratteristica ove
lavora il motore, è molto più inclinato per cui la velocità risulta molto sensibile alla variazione del
carico: l’azionamento necessiterà di un controllo a catena chiusa per la stabilizzazione della velocità.-
Questo tipo di azionamento ha il pregio di essere il più economico ma anche i seguenti difetti:
Ristretto campo di regolazione - Elevato scorrimento e quindi basso rendimento - La tensione
fornita dal convertitore ha molte armoniche che fanno nascere coppie pulsanti e aumentano le perdite
nel ferro di rotore - A velocità ridotte, essendo la tensione bassa, la coppia massima si riduce.-
7.5.5.
Variazione della velocità mediante controllo della tensione e della
frequenza di alimentazione:
Questo tipo di regolazione viene normalmente impiegati con motori a gabbia funzionanti
con basso scorrimento ed elevato rendimento.- Essendo
109
n 2 = n 1 (1 − s ) =
60 f 1
(1 − s ) ≈
60 f 1
n 2∗ = n 1 ( 1 − s ∗ ) =
60 f 1
−
60 R 2
p
2 π pL 2
p
p
si vede la possibilità di variare la velocità Ω 2 agendo sulla frequenza di alimentazione f 1 .Richiamando le relazioni fondamentali del M.A. :
E 1 = k 1 f 1Φ
⇒
V 1 ≈ k 1 f 1Φ
E 2 (1 ) = k 2 f 1 Φ
sE (1 )
R2
E 2 (1 )
essendo :
>> X 2 (1 )
I 2 (s )=
≈ 2
2
R
s
2
R2
+ X 22 (1 )
s
T g = k ⋅ Φ ⋅ I 2 ( s ) ⋅ cosϕ 2 ≈ k ⋅ Φ ⋅ I 2 ( s )
essendo ϕ 2 ≈ 0 [ X 2 ( 1 ) trascurabile ]
T Max =
2
3 V1
1
=
3 p V 12
1
=K
V 12
f 12
m 2 Ω 1 2 X 2 (1 ) m 2 2 πf 1 2 ⋅ 2 πf 1 L 2
Analizzando le espressioni della coppia generata T g e della tensione applicata V1 si possono
fare le seguenti considerazioni:
--Non potendo la corrente I 2 superare il suo valore nominale di dimensionamento, per
ottenere la massima coppia possibile e necessario che il flusso Φ sia mantenuto al suo valore
nominale
--Se la frequenza viene aumenta (per variare la velocità) il flusso tende a diminuire in
corrispondenza ad una tensione di alimentazione costante
--Volendo mantenere costante il flusso, sarà necessario variare contemporaneamente la
tensione e la frequenza in modo che risulti comunque:
f 1 = K 'V1
Dalle osservazioni fatte si deduce che la variazione di velocità ottenuta mediante una
contemporanea variazione di tensione e frequenza di alimentazione in modo che il loro rapporto
rimanga costante, porta ad un Funzionamento a coppia costante per il quale risulterà anche:
V2
TMax = K 12 = KK ' = cos tan te
f1
Tm
10Hz
10H z
20Hz
30Hz
40Hz
f 1 =50Hz
Regolazione
a coppia costante
V1
f1
*
n2*
n2
n1
110
= cos t .
In relazione al funzionamento a coppia costante, la tensione V 1 può venire aumentata fino al
valore della V 1 n in corrispondenza della quale la frequenza f 1 sarà aumentata fino ad un valore pari
alla frequenza di base f 1 n (tipico valore di f 1 n tra 50Hz e 100 Hz ) .Per aumentare ulteriormente la velocità, dopo aver portato la tensione V 1 al valore V 1 n e in
corrispondenza la frequenza f 1 al valore f 1 n , si potrà aumentare ulteriormente la frequenza f 1
senza però aumentare corrispondentemente al tensione (per questioni di isolamento).- Ne seguirà che
ad ogni ulteriore aumento di frequenza, senza un corrispondente aumento di tensione, corrisponderà
una proporzionale diminuzione di flusso:
V1 ≅ k1 f1Φ
e quindi, a parità di corrente
ammissibile, una diminuzione di coppia generata e di coppia massima:
V12
Tg = k ⋅ Φ ⋅ I 2 (s )
TMax = K 2
f1
Riducendosi la coppia generata all’aumentare della velocità, il funzionamento risulterà essere
a Potenza costante
Regolazione
a coppia costante
Tm
10Hz
20Hz
30Hz
40Hz
f 1n=50Hz
60Hz
Regolazione
a potenza costante
70Hz
80Hz
n2
Lo schema a blocchi di un azionamento a tensione e frequenza variabili può essere del tipo:
111
Nel circuito indicato l’ampiezza della tensione fornita dall’inverter viene controllato variando
la tensione continua fornita dal raddrizzatore, mentre la frequenza viene controllata dall’inverter
stesso.- Il circuito si presta quindi ad un controllo del motore sia a coppia costante che a potenza
costante.- Nel circuito il segnale V f , utilizzato per pilotare l’Inverter e quindi la frequenza della
tensione di alimentazione del motore, serve anche a stabilire il valore della tensione di riferimento :
V Rv = k ⋅ V f + V o
che pilota l’anello di controllo della tensione del raddrizzatore.- Quando il blocco che genera la V RV
va in saturazione la tensione fornita al motore può variare di frequenza ma non di ampiezza passando
così il funzionamento da coppia costante a potenza costante.-
7.6.0. Confronto tra motore a corrente continua e motore asincrono
L’azionamento mediante un motore asincrono presenta i seguenti vantaggi:
-- Come conseguenza dell’assenza del collettore e quindi di spazzole e scintillio si necessita
di una minor manutenzione; il rotore a gabbia risulta più robusto e meno costoso; in assenza di
fenomeni di commutazione che limitano la corrente assorbibile, si possono ottenere coppie
maggiori.-- Si possono ottenere alte velocità con l’unica limitazione legata alle forze centrifughe e ai
cuscinetti (nelle macchine in c.c. i limiti sono dovuti alla presenza del collettore e spazzole).-- Il rotore monolitico (gabbia in pressofusione) consente una miglior equilibratura
meccanica.-- L’avvolgimento induttore esterno consente un miglior smaltimento del calore.-- L’uso di un raddrizzatore e inverter per l’alimentazione consente di funzionare verso la rete
con fattore di potenza praticamente unitario .-- La macchina asincrona è di più semplice costruzione, meno costosa, più robusta,
facilmente resa stagna e quindi usabile in ambienti difficili.-- Ha rendimento più elevato.L’azionamento mediante motore a corrente continua presenta invece i seguenti vantaggi :
-- Coppie di spunto più elevate, fino a sei volte la nominale.-- Estesa gamma di variazione delle velocità (fino 1 : 1000 ).-- Possibilità di funzionamento a quattro quadranti con un esteso campo di funzionamento a
potenza costante.-
112
INDICE
CAPITOLO I
MACCHINE IN CORRENTE CONTINUA ..................................................................................... 1
1.1.0.
Generatori di corrente continua – Dinamo ............................................................................... 1
1.1.1. Generalità: ................................................................................................................................................... 1
1.1.2. Principio di funzionamento: ........................................................................................................................ 1
1.1.3. Funzionamento a vuoto: .............................................................................................................................. 3
1.1.4. Funzionamento a carico: .............................................................................................................................. 4
1.1.5. Commutazione:............................................................................................................................................ 4
1.1.6. Caratteristiche a carico: ............................................................................................................................... 5
1.1.6.1.
Dinamo con eccitazione indipendente: ............................................................................................. 5
1.1.6.2.
Dinamo con eccitazione in derivazione: ........................................................................................... 6
1.1.6.3.
Dinamo con eccitazione in serie: ...................................................................................................... 6
1.1.6.4.
Dinamo con eccitazione composta: .................................................................................................. 7
1.1.7.
Potenze, perdite e rendimento della Dinamo: ............................................................................................. 7
1.2.0.
Motori in corrente continua ................................................................................................... 9
1.2.1.
Principio di funzionamento: ....................................................................................................................... 9
1.2.2.
Motori con eccitazione indipendente: ......................................................................................................... 9
1.2.3.
Motori con eccitazione in serie: ................................................................................................................ 10
1.2.4.
Avviamento dei motori: ............................................................................................................................ 11
1.2.5.
Senso di rotazione dei motori: .................................................................................................................. 12
1.2.6.
Rendimento dei motori: ............................................................................................................................ 12
1.2.7.
Dati di targa delle macchine rotanti: ......................................................................................................... 13
CAPITOLO II
MACCHINE SINCRONE........................................................................................................... 16
2.1.0.
Generatori sincroni – Alternatori ................................................................................................. 16
2.1.1.
Generalità: ............................................................................................................................................... 16
2.1.2.
Funzionamento a vuoto: .......................................................................................................................... 17
2.1.3.
Funzionamento a carico: .......................................................................................................................... 18
2.1.3.1.
Diagramma di funzionamento secondo Behn-Eschemburg: ........................................................ 18
2.1.3.2.
Caratteristiche esterne: ................................................................................................................ 19
2.1.4.
Perdite e rendimento dell’alternatore:...................................................................................................... 20
2.1.5.
Parallelo dei generatori sincroni con una rete prevalente: ....................................................................... 21
2.2.0.
Motori sincroni ............................................................................................................................ 23
2.2.1.
Principio di funzionamento................................................................................................................... 23
CAPITOLO III
TRASFORMATORI
3.1.0.
3.1.1.
3.1.2.
3.1.3.
3.1.4.
3.1.5.
3.1.6.
3.1.7.
3.1.8.
3.1.9.
3.2.0.
3.2.1.
3.2.2.
3.2.3.
3.2.4.
3.2.5.
3.3.0.
................................................................................................................. 28
Trasformatori monofasi ........................................................................................................ 28
Generalità: ................................................................................................................................................. 28
Trasformatore perfetto: .............................................................................................................................. 28
Trasformatore reale e suo circuito equivalente: ......................................................................................... 30
Trasformatore reale funzionante a vuoto: .................................................................................................. 32
Trasformatore reale funzionante a carico: ................................................................................................. 33
Circuito equivalente secondario: .............................................................................................................. 33
Circuito equivalente primario: .................................................................................................................. 35
Funzionamento in corto circuito: .............................................................................................................. 37
Perdite e rendimento dei trasformatori: .................................................................................................... 38
Trasformatori trifasi ............................................................................................................ 41
Generalità e collegamenti: ........................................................................................................................ 41
Trasformatori trifasi con unico nucleo:..................................................................................................... 42
Funzionamento a vuoto del trasformatore reale trifase: ............................................................................ 43
Funzionamento a carico del trasformatore trifase: .................................................................................... 44
Perdite e rendimento dei trasformatori trifasi: .......................................................................................... 46
Dati di targa dei trasformatori ............................................................................................. 47
113
CAPITOLO IV
MOTORI ASINCRONI ............................................................................................................. 52
4.1.0.
Motori asincroni trifasi con rotore avvolto ................................................................................. 52
4.1.1.
4.1.2.
4.1.3.
4.1.4.
4.1.5.
4.1.6.
4.1.7.
Generalità e struttura costruttiva: ........................................................................................................... 52
Principio di funzionamento: .................................................................................................................. 53
Circuito equivalente del motore asincrono: ........................................................................................... 54
Diagramma circolare del motore asincrono: .......................................................................................... 57
Potenze, perdite e rendimento dei motori asincroni: .............................................................................. 61
Caratteristica meccanica del motore asincrono:..................................................................................... 62
Avviamento dei motori asincroni con rotore avvolto: ........................................................................... 64
Motori asincroni trifasi con rotore a gabbia.............................................................................. 65
Motori asincroni a gabbia semplice: ...................................................................................................... 65
Motori asincroni a doppia gabbia: ......................................................................................................... 65
4.2.0.
4.2.1.
4.2.2.
CAPITOLO V
MACCHINE SPECIALI.................................................................................................... 69
5.1.0.
5.2.0.
5.3.0.
Motore asincrono monofase ........................................................................................................... 69
Motore asincrono a poli schermati ................................................................................................ 72
Motore monofase a collettore ......................................................................................................... 73
5.3.1.
Motori universali ................................................................................................................................... 75
CAPITOLO VI
CONVERTITORI STATICI........................................................................................... 76
6.1.0
6.2.0
Generalità........................................................................................................................................ 76
Raddrizzatori ................................................................................................................................... 78
6.2.1.
6.2.1.1.
6.2.1.2.
6.2.2.
6.2.2.1.
6.2.2.2.
6.2.3.
6.2.4.
6.2.5.
6.2.6.
Raddrizzatori non controllati a gruppi di commutazione: ...................................................................... 78
Monofase: ................................................................................................................................. 78
Polifase : ................................................................................................................................... 79
Raddrizzatori non controllati a ponte:................................................................................................... 81
Monofase : ................................................................................................................................ 81
Trifase: ..................................................................................................................................... 82
Raddrizzatori controllati a gruppi di commutazione: ............................................................................. 84
Raddrizzatori a ponte totalmente controllato: ....................................................................................... 85
Raddrizzatori a ponte semicontrollato: .................................................................................................. 87
Raddrizzatori bidirezionali: ................................................................................................................... 88
6.3.0. Inverter ........................................................................................................................................... 88
6.3.1.
Inverter monofase a ponte intero (Full Bridge Inverter): ....................................................................... 89
6.3.2.
Inverter monofase a mezzo ponte ( Half-Bridge inverter): ................................................................... 90
6.3.3.
Inverter monofase in Push-pull:............................................................................................................. 91
6.3.4.
Inverter trifase a ponte intero:................................................................................................................ 92
6.3.5.
Inverter trifase a mezzo ponte:............................................................................................................... 92
6.4.0. Regolatori ....................................................................................................................................... 94
CAPITOLO VII
AZIONAMENTI INDUSTRIALI ................................................................................... 96
7.1.0.
7.2.0.
7.2.1.
7.2.2.
7.3.0.
7.4.0.
Generalità....................................................................................................................................... 96
Struttura generale di un azionamento ............................................................................................ 96
Sistemi di controllo a catena aperta: ...................................................................................................... 98
Sistemi di controllo a catena chiusa:...................................................................................................... 99
Espressione analitica della risposta di un sistema a catena chiusa ............................................. 100
Azionamenti con motori a corrente continua ................................................................................ 103
7.4.1.
Caratteristiche dei Convertitori per gli azionamenti dei motori a c.c.:................................................. 103
7.4.1.1.
Convertitori unidirezionali: .................................................................................................... 104
7.4.1.2.
Convertitori bidirezionali: ...................................................................................................... 105
7.5.0. Azionamenti con motori asincroni: .............................................................................................. 106
7.5.1.
Modello circuitale e relazioni fondamentali del motore asincrono: ...................................................... 106
7.5.2.
Variazione della velocità per commutazione del numero dei poli: ....................................................... 108
7.5.3.
Variazione della velocità per inserzione di resistenze rotoriche: .......................................................... 108
7.5.4.
Variazione della velocità mediante il controllo della tensione di alimentazione: ................................. 109
7.5.5.
Variazione della velocità mediante controllo della tensione e della frequenza di alimentazione:......... 109
7.6.0. Confronto tra motore a corrente continua e motore asincrono ................................................... 112
114