LA STAZIONE DI TERRA
DEL DIMOSTRATORE TECNOLOGICO SATELLITARE
(DTS)
www.edusat.it
INDICE
1. Introduzione ................................................................................................................. 3 2. Le caratteristiche generali del sottosistema................................................................... 3 3. Lista delle abbreviazioni e unità di misura ................................................................... 4 4. Le funzioni della stazione di terra ................................................................................ 6 5. L’architettura della stazione di terra ............................................................................. 6 6. Descrizione dei blocchi funzionali ................................................................................ 7 6.1 Il blocco di alimentazione e regolazione ................................................................ 7 6.2 Il blocco di logica ed elaborazione ......................................................................... 9 6.2.1 Il protocollo di comunicazione......................................................................... 12 6.3 Il blocco della telemetria digitale (RSSI – Received Signal Strenght Indicator) .... 16 6.4 Il modulo RF........................................................................................................ 16 6.4.1 Qualche richiamo di teoria sui ricevitori e trasmettitori................................... 17 6.4.1.1 Come è fatto un trasmettitore a Radio Frequenza ............................................... 17 6.4.1.2 Come è fatto un ricevitore a Radio Frequenza .................................................... 19 6.4.2 Il componente di base della stazione di terra, il CC1020 .................................. 22 6.4.3 Le caratteristiche del trasmettitore ................................................................... 32 6.4.4 Le caratteristiche del ricevitore ........................................................................ 32 Le caratteristiche principali ................................................................................. 32 La frequenza intermedia (IF) ............................................................................... 33 La generazione della frequenza di riferimento .................................................... 34 Il sintetizzatore di frequenza ............................................................................... 35 L’antenna della stazione di terra ......................................................................... 35 6.4.4.1 6.4.4.2 6.4.4.3 6.4.4.4 6.5 7. Il consumo di potenza elettrica della stazione di terra ................................................ 35 8. Le interfacce della stazione di terra ............................................................................ 36 9. 8.1 Le interfacce elettriche ......................................................................................... 36 8.2 Le interfacce meccaniche ..................................................................................... 37 8.3 Requisiti particolari dovuti all’ambiente di funzionamento ................................ 37 8.4 Requisiti di interfaccia termica ............................................................................ 37 8.5 Interfacce di programmazione ad uso didattico .................................................. 37 La realizzazione della stazione di terra ....................................................................... 38 2
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
1. Introduzione
Questo documento descrive la stazione di terra attraverso la quale è possibile ricevere le
telemetrie e inviare i comandi al dimostratore tecnologico satellitare (DTS). Lo schema che
verrà seguito segue un approccio che in inglese viene definito “top-down” ovverosia
dall’alto verso il basso, cioè parte dalla descrizione generale per scendere via via nei
particolari del progetto e quindi della realizzazione pratica.
2. Le caratteristiche generali del sottosistema
La stazione di terra rappresenta un sistema di comunicazione in banda UHF che provvede
allo scambio di dati tra la stazione di terra e il “satellite”.
La stazione di terra è in grado di:
ricevere segnali modulati in frequenza, inviati dal sottosistema COMMS (“downlink”)
su una frequenza portante compresa nella banda denominata ISM UHF;
demodulare e decodificare, secondo il protocollo standard AX.25 o quello sviluppato
ad hoc, i segnali ricevuti, modulati in frequenza, per la successiva elaborazione da
parte del software sul personal computer;
codificare i dati da trasmettere utilizzando il protocollo standard AX.25 oppure il
protocollo sviluppato ad hoc dalla IMT srl;
trasmettere segnali modulati in frequenza su una frequenza portante anch’essa in
banda UHF;
funzionare in modalità “half-duplex”, secondo la quale il ricevitore è spento quando il
trasmettitore è acceso e viceversa;
utilizzare due frequenze distinte, una per il collegamento “uplink”, cioè dalla stazione
di terra al “satellite” e l’altra per il “downlink”, cioè per il collegamento inverso.
3
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
La stazione di terra è un apparato interamente programmabile tramite il firmware
presente in un microcontrollore, e questa caratteristica lo rende capace di soddisfare molti
requisiti, a seconda delle esigenze di trasmissione e/o ricezione.
Per effettuare le funzioni di cui sopra, la stazione di terra per il DTS di EduSAT trasmette e
riceve segnali a distanza, modulati in frequenza, su frequenze ISM in banda UHF (da 433
MHZ a 434 MHz) con larghezza di canale di 12,5 KHz o 25 KHz. La massima potenza di
trasmissione è pari a 10 mW, + 10 dBm.
3. Lista delle abbreviazioni e unità di misura
La tabella che segue mostra il significato delle principali sigle usate in questo documento;
altre sigle usate localmente vengono spiegate nel corpo del documento stesso.
Abbreviazione
°C
A
Significato
Ohm, unità di misura della resistenza elettrica, secondo il Sistema Internazionale
Gradi Centigradi, unità di misura della temperatura
Ampere, unità di misura della corrente elettrica nel Sistema Internazionale
ADC
Analog to Digital Converter, Convertitore Analogico Digitale
AFC
Automatic Frequency Control, Controllo Automatico di frequenza
Baud rate
CPU
Numero di simboli trasmessi in un secondo
Central Processing Unit, Unità Centrale di Elaborazione (di un computer)
dB
dB
decibel, unità di misura che esprime, in forma logaritmica, il rapporto fra due
grandezze fisiche, per esempio A1 ed A2, dello stesso tipo. Se a è il valore numerico di
questo rapporto, cioè a = A1/A2, la sua misura in decibel si esprime come:
10 Log10 a
In genere la grandezza A2 viene presa come riferimento per la misura.
dBm
unità di misura logaritmica di un rapporto di potenza, riferito alla potenza di un
milliWatt (un millesimo di Watt)
DTS
Dimostratore Tecnologico Satellitare
EEPROM
FM
FSK
Electrically Erasable Programmable Read-Only Memory, Memoria a sola lettura
elettricamente cancellabile e riprogrammabile
Frequency Modulation, Modulazione di Frequenza
Frequency-Shift Keying, una forma di codifica in forma binaria a modulazione di
frequenza, in cui il segnale modulante sposta la frequenza della portante da uno
all'altro di due valori predeterminati
4
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
GHz
GigaHertz = 1.000.000.000 Hz
Hz
Hz, unità di misura della frequenza nel Sistema Internazionale. 1 Hz equivale ad 1
ciclo al secondo
IF
Intermediate Frequency, Frequenza Intermedia di un ricevitore radio
ISM
Industrial, Scientific and Medical (Industriale, Scientifico e Medico)
LDO
Low Drop-Out (bassa caduta, di tensione), caratteristica di un regolatore serie
LNA
Low Noise Amplifier, Amplificatore a Basso Rumore
mA
MHz
mW
PA
milliAmpere: un millesimo di Ampere
MegaHertz = 1.000.000 Hz
milliWatt, corrisponde ad un millesimo di Watt
Power Amplifier, Amplificatore di Potenza
PLL
Phase-Locked Loop, Anello ad Agganciamento di Fase
RAM
Random Access Memory, Memoria ad Accesso Casuale
RISC
Reduced Instruction Set Computer, Computer con Corredo Ridotto di Istruzioni
SPI
Serial Peripheral Interface, Interfaccia Seriale con le Periferiche
SRD
Short Range Device, Dispositivo a Bassa Portata
UHF
Ultra-High Frequencies, Frequenze Ultra Alte
V
VCO
W
XOSC
RSSI
GS
Volt, unità di misura della tensione elettrica nel Sistema Internazionale
Voltage Controlled Oscillator, Oscillatore Controllato in Tensione
Watt, unità di misura della potenza, sviluppata o dissipata, secondo il Sistema
Internazionale. Nelle misure elettriche, 1 W = 1 V x 1 A
Crystal Oscillator, Oscillatore a Cristallo (Quarzo)
Received Signal Strenght Indicator – Livello del segnale ricevuto
Ground Station – stazione di terra
5
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
4. Le funzioni della stazione di terra
La stazione di terra del DTS, spesso chiamata in modo abbreviato “GS – Ground Station”
nel resto di questo documento, deve permettere lo scambio dati tra il DTS ed il personal
computer ad esso collegato. La stazione deve quindi essere in grado di codificare e quindi
trasmettere i comandi al DTS, e di ricevere e decodificare le telemetrie trasmesse dal DTS.
5. L’architettura della stazione di terra
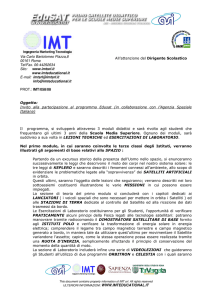
La stazione di terra del DTS è composto da quattro blocchi fondamentali, come mostrato
nella Figura 1:
Figura 1 - Blocchi che compongono la stazione di terra
Il blocco di alimentazione e regolazione, la cui funzione è quella di fornire una tensione
continua stabilizzata di 3,3 V ai blocchi di logica ed elaborazione e di radio frequenza.
Il blocco di alimentazione e regolazione riceve in ingresso una tensione continua di 5 V
che gli viene fornita attraverso la porta di comunicazione USB (modalità self-powered);
Il blocco di logica ed elaborazione, la cui funzione è la gestione dell’intera stazione di
terra tramite l’uso di un microcontrollore (cioè un microcomputer) controllato da un
software dedicato (firmware);
6
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Il blocco di telemetria digitale, che ha la funzione di monitorare il livello energetico del
segnale RF ricevuto. Il valore dell’RSSI viene letto da un registro interno al modulo RF;
Il blocco di radiofrequenza, che ha la duplice funzione di:
o raccogliere le informazioni da trasmettere, modulare una portante a radio
frequenza ed inviarla all’antenna trasmittente;
o ricevere il segnale dall’antenna ricevente, demodularlo ed inviare le informazioni
che vi sono contenute al personal computer.
I paragrafi che seguono descriveranno le caratteristiche di ciascuno dei blocchi funzionali.
6. Descrizione dei blocchi funzionali
6.1
Il blocco di alimentazione e regolazione
Il blocco di alimentazione e regolazione è costituito da un regolatore di tipo lineare, che
trasforma la tensione di 5 V fornita al suo ingresso attraverso la porta USB, in una tensione
di 3,3 V necessaria per l’alimentazione del blocco di logica ed elaborazione e di quello a
radiofrequenza.
La stabilità dell’alimentazione in questa istanza è molto importante in quanto, eventuali
variazioni delle caratteristiche di alimentazione potrebbero influire sul modulo di
ricetrasmissione e quindi sull’impossibilità di una corretta ricostruzione dell’informazione
ricevuta.
I parametri che caratterizzano il progetto di un alimentatore sono:
regolazione sul carico (tensione costante al variare della corrente di carico, tipicamente
0,01%/mA);
regolazione di linea (insensibilità ai disturbi sull’alimentazione primaria, tipicamente
0,02%/V);
regolazione rispetto alle variazioni di temperatura;
resistenza agli effetti dell’invecchiamento.
7
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
L’unico modo che ha un alimentatore lineare per stabilizzare una tensione o una corrente è
di ridurla al disotto del minimo valore presente all’ingresso: ciò comporta una perdita di
potenza, tanto più marcata quanto maggiore è la differenza tra la tensione di ingresso e
quella di uscita.
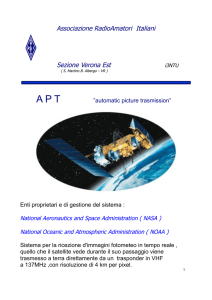
Il caso più evidente è quello dei regolatori di tensione denominati “in serie”, che per
stabilizzare la tensione in uscita provocano una certa caduta interna di tensione poiché i
circuiti di regolazione sono in serie all’utilizzatore. Ne consegue che il regolatore è
percorso dalla stessa corrente che va nel carico, quindi risulta una perdita di potenza,
dissipata nel circuito di regolazione, quantificabile nel prodotto tra la differenza di
potenziale ingresso/uscita (Vdropout) e la corrente erogata (Icarico). Per una migliore
comprensione si veda la sottostante Figura 2.
Figura 2 - La perdita di potenza in un regolatore serie, o lineare
Il regolatore lineare tipico ha dunque un rendimento basso, tanto minore quanto più le
tensioni in gioco sono comparabili con la minima caduta possibile fra ingresso e uscita.
Ovviamente la corrente assorbita dalla stazione di terra è molto piccola e questa
caratteristica ha permesso la scelta di un regolatore lineare a bassa caduta, in inglese lowdropout (LDO), ovvero un dispositivo che riesce a fornire una tensione regolata di uscita
subendo una bassa caduta di tensione fra ingresso e uscita.
8
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
6.2
Il blocco di logica ed elaborazione
Il blocco di logica e elaborazione gestisce tutto il flusso dati della stazione di terra ed
implementa il protocollo di comunicazione, come descritto al paragrafo 6.2.1.
Il processore utilizzato per gestire l’intero sistema è un microcontrollore tipo PIC16F689 a
20 piedini, realizzato in tecnologia CMOS (Complementary Metal Oxide Semiconductor),
al cui interno sono presenti anche una memoria flash, una memoria RAM e le periferiche
di interfaccia.
La CPU (Central Processing Unit) in esame è una RISC (Reduced Instruction Set
Computer) in contenitore tipo SO (Small Out-line package) realizzata in tecnologia CMOS
con istruzioni codificate a 14 bit. Il firmware è scritto in assembler basato su un insieme di
35 istruzioni (ISA – Instruction Set Architecture).
Il microcontrollore svolge i seguenti compiti:
riceve le telemetrie dal “satellite” attraverso un link a radio frequenza in banda UHF e
le memorizza in RAM;
configura tutti i parametri essenziali del modulo a radio frequenza;
prepara i dati per la trasmissione radio dei comandi da impartire al “satellite”
attraverso il sottosistema ACS.
Il microcontrollore ha le caratteristiche riassunte nella Tabella 1.
9
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Parametro
Valore
Architettura generale
RISC - Reduced Instruction Set Computer
(Computer con corredo ridotto di istruzioni)
Corredo di istruzioni
35 (quasi tutte eseguite in un solo ciclo)
Frequenza operativa
fino a 20 MHz
Durata di un ciclo di istruzione
200 ns (alla massima frequenza di clock)
Reset e ritardi
POR (Power-On), BOR (Brown-Out), PWRT
(Power-up Timer), OST(Oscillator Startup)
Memoria di programma (tipo Flash con lunghezza
di parola di 14 bit)
4 KiloWord (4000 Parole)
Memoria dati (RAM)
368 Byte
Memoria dati (EEPROM)
256 Byte
Interrupt di programma dall’esterno
possibile
Porte di I/O - Input/Output (Ingresso/uscita)
A e C a 8 vie
B a 4 vie
Timer
3
Comunicazioni seriali
EUSART
Comunicazione parallela
No
Modulo convertitore Analogico/Digitale
conversione a 10 bit, 12 canali di ingresso
Durata delle Memorie Flash ed EEPROM
Tensione di alimentazione
memoria flash scrivibile fino a 100.000 volte
memoria EEPROM scrivibile fino a 1.000.000
di volte
conservazione dei dati: oltre 40 anni
da 2,0 V a 5,5 V
Corrente assorbita tipica (dipende dalla frequenza
operativa e dalla tensione di alimentazione))
220 A alla frequenza operativa di 4 MHz con una
tensione di alimentazione di 2 V
Gamma di temperatura operativa
da - 40 °C a + 85 °C
Produttore
Microchip Technology Inc. – USA
Tabella 1 - Sommario della caratteristiche del microcontrollore
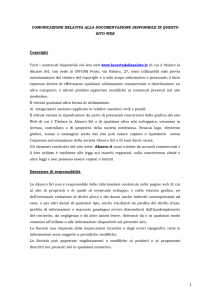
Lo schema a blocchi del microcontrollore è mostrato nella Figura 3 seguente.
10
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Figura 3 - Schema a blocchi del microcontrollore (fonte: Microchip)
11
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
6.2.1
Il protocollo di comunicazione
La stazione di terra riceve un pacchetto dati di 30 byte che contiene tutte le telemetrie del
DTS, attraverso un link seriale con il modulo a radio frequenza. La struttura del pacchetto
è descritta nel documento dedicato alle telemetrie del DTS.
La comunicazione tra il modulo RF (in banda UHF) ed il microcontrollore avviene
mediante un collegamento seriale sincrono a due linee (Figura 4):
linea di clock;
linea dati.
Il clock (2400bps) viene recuperato dall’anello ad aggancio di fase (PLL – Phase Locked
Loop) presente nel circuito RF e fornito al microcontrollore per la sincronizzazione dei dati
ricevuti. Per la ricezione dei dati, viene sfruttato il vettore di interrupt del
microcontrollore.
Figura 4 - Le comunicazioni fra il modulo RF e il microcontrollore
Il modulo GS (Ground Station) riceve un pacchetto dati dal DTS mediante il sottosistema
COMMS che prepara la trasmissione inserendo un byte di start all’inizio del pacchetto
dati, un byte di controllo d’errore e un byte di fine trasmissione in coda al pacchetto dati. Il
12
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
protocollo di trasmissione (lato DTS) consiste nell’aggiunta di 3 byte di controllo al
pacchetto dati (Figura 5).
33 byte
Byte di
start
1 byte
Pacchetto dati
Byte
controllo
errori
Byte di
fine
30 byte
1 byte
1 byte
Figura 5 - Il pacchetto ricevuto dalla “stazione di terra”
Il byte di start è rappresentato da una sequenza di zeri che in codifica NRZ corrispondono
a 8 transizioni (Figura 6). Questo permette un buon aggancio del PLL e quindi una buona
sincronizzazione dei dati ricevuti (lato GS).
clock
t
start
t
Figura 6 - Forma d’onda del byte di start, in formato NRZ
Ogni pacchetto viene trasmesso tre volte per evitare che venga perso a causa del rumore e
disturbi presenti nell’etere (Figura 7). Gli ultimi tre bit del trentesimo byte del pacchetto
13
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
dati vengono utilizzati per identificare quale dei tre pacchetti all’interno del burst è stato
ricevuto correttamente.
Figura 7 - La ritrasmissione del pacchetto dati
Il codice a controllo d’errore è rappresentato da un singolo byte e basato sulla scansione
dei singoli bit in trasmissione e ricezione, secondo il processo mostrato in Figura 8.
Il byte di controllo (CRC_byte) viene inizializzato con una sequenza di uno (0xFF
esadecimale), mentre il bit di riporto (carry) viene settato a zero.
Si esegue una rotazione a destra del byte di controllo e si esegue un test sul bit di riporto.
In questo modo si avrà che se il bit meno significativo del byte di controllo era zero, il
riporto sarà zero, viceversa nel caso in cui il bit meno significativo era uno.
Successivamente viene eseguito un confronto tra il bit trasmesso e il bit di riporto: se i due
bit sono uguali il valore di CRC_byte viene modificato attraverso una operazione di OR
esclusivo col valore 0x84 esadecimale altrimenti viene lasciato inalterato.
Il calcolo viene eseguito per tutti i bit del pacchetto dati ovvero, per 30x8=240 bit.
14
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
CRC_byte=0xFF
clear bit di carry
ruota a destra
CRC_byte
NO
(TX bit XOR
carry)=1?
CRC_byte=CRC_byte XOR 0x84
Figura 8 - Diagramma di flusso della generazione del codice di controllo errore
La stazione di terra utilizza lo stesso protocollo per inviare i comandi al dimostratore
tecnologico satellitare. Il pacchetto, in questo caso è di soli 10 byte come mostra la Figura
9.
Figura 9 - Protocollo di trasmissione (lato GS)
15
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Come nel caso della ricezione, il byte di start è costituito da una sequenza di zeri. I byte di
informazione utile sono 7 seguiti dal byte di controllo d’errore e il byte di stop. Per
rendere più robusta e affidabile la trasmissione dei comandi il pacchetto viene inviato tre
volte consecutivamente, dove il settimo byte dell’informazione utile rappresenta il numero
di pacchetto (Figura 10).
Figura 10 - Burst del pacchetto dati relativo ai comandi
6.3
Il blocco della telemetria digitale (RSSI – Received Signal Strenght Indicator)
La potenza del segnale ricevuto è un indice del valore del livello di energia presente sul
ricevitore. La condizione ottimale per la misura della potenza del segnale ricevuto è
rappresentata dall’assenza assenza di modulazione (senza ricevere dati). Nel caso della
stazione di terra, la misura dell’RSSI viene eseguita nel breve intervallo di tempo (circa
200ms) in cui il modulo RF si trova in ricezione. La misura viene effettuata solo dopo che si è verificato l’aggancio alla frequenza
selezionata (Lock indicator In lock: 0), aggancio che viene controllato continuamente dal
microcontrollore. Il valore dell’RSSI viene letto da un registro interno al modulo RF
mediante BUS seriale (SPI).
6.4
Il modulo RF
In questa sezione verrà descritta tutta la parte a radio frequenza della stazione di terra.
16
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
6.4.1
Qualche richiamo di teoria sui ricevitori e trasmettitori
Prima di arrivare alla descrizione vera a propria del modulo RF, una breve introduzione
sui ricetrasmettitori a radio frequenza.
6.4.1.1
Come è fatto un trasmettitore a Radio Frequenza
Analizziamo lo schema a blocchi di un trasmettitore a radiofrequenza (Figura 11), dove è
possibile notare la suddivisione del trasmettitore in tre macro-parti:
il circuito di interfaccia di ingresso;
il circuito di elaborazione;
il circuito di interfaccia di uscita, comprensivo dell’antenna.
Elaboratore
fP
Oscillatore locale
fP ±Δf
Stadio separatore
e moltiplicatore
Modulatore
±Δf
Amplificatore RF
Circuito di interfaccia
di uscita
Antenna
Circuito di interfaccia
di ingresso
Amplificatore in
BB
Rete adattatrice
Figura 11 - Schema a blocchi di un trasmettitore RF
Il circuito di interfaccia di ingresso provvede a raccogliere l’informazione che si vuole
trasmettere al fine di convertirla in una forma tale per cui possa essere elaborata dal blocco
successivo. Se l’informazione da trasmettere fosse di tipo analogico, il circuito di
interfaccia dovrebbe operare una trasduzione del segnale di ingresso. Facciamo un
esempio familiare: se, per esempio, l’informazione da trasmettere fosse un segnale vocale,
la trasduzione avverrebbe attraverso un microfono che convertirebbe il segnale sonoro in
una tensione elettrica variabile nel tempo.
17
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Nel nostro caso, l’informazione da trasmettere è costituita da dati digitali che hanno già il
formato di una tensione elettrica variabile nel tempo, e quindi il circuito di interfaccia in
ingresso serve essenzialmente a garantire che il segnale in ingresso al trasmettitore abbia i
livelli logici di tensione corretti.
L’Amplificatore in Banda Base opera sul segnale di ingresso aumentandone il valore di
tensione, al fine di evitare che possa essere “mascherato” dal rumore, sia da quello
presente nell’etere e dovuto a interferenze di vario genere, sia dal rumore termico generato
dai circuiti stessi del trasmettitore.
Procedendo da sinistra verso destra nella parte di elaborazione dello schema della Figura
11, notiamo la presenza di un oscillatore locale che genera una frequenza “f “ non molto
elevata. In genere tale frequenza viene generata da un oscillatore a quarzo, che presenta
un buon coefficiente di stabilità in frequenza e un buon fattore di merito Q dell’ordine di
104 ÷ 106. Ricordiamo, senza entrare in dettagli, che un valore di Q più alto indica un
minor tasso di dissipazione di energia rispetto alla frequenza di oscillazione, per cui le
oscillazioni si smorzano più lentamente.
Lo stadio separatore e moltiplicatore consente di moltiplicare la frequenza generata
dall’oscillatore al fine di ottenere la frequenza portante fp. Questo blocco introduce una
perdita di conversione ed inoltre modifica la banda del segnale in ingresso, ma visto che si
tratta di generare una portante, quello che interessa è la stabilità in frequenza.
Il blocco successivo è un modulatore che può essere, in generale, di due tipi:
modulatore in ampiezza (AM – Amplitude Modulation);
modulatore in frequenza (FM – Frequency Modulation).
Il modulatore presenta tre porte, due di ingresso per la portante e per il segnale in banda
base da trasmettere e una di uscita sulla quale è presente la portante modulata.
Nel caso di modulazione AM, il segnale modulante provoca variazioni nell’ampiezza della
portante. Nel caso di modulazione FM, il segnale modulante provoca variazioni di
18
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
frequenza della portante in maniera proporzionale al segnale modulante lasciandone
inalterata l’ampiezza.
Il blocco successivo, denominato Amplificatore RF provvede ad amplificare il segnale che
andrà in antenna per la trasmissione. Un parametro essenziale dell’amplificatore a radio
frequenza è il rendimento: maggiore è il rendimento, minore è il calore che si deve
dissipare.
La rete di adattamento serve ad assicurare il massimo trasferimento di potenza tra
l’amplificatore RF e l’antenna. Per la stazione di terra il problema della dissipazione
termica è comunque trascurabile in quanto le potenze in gioco sono dell’ordine del
milliwatt.
6.4.1.2
Come è fatto un ricevitore a Radio Frequenza
Un ricevitore è costituito da quattro elementi fondamentali, come mostrato nella Figura 12:
il circuito di interfaccia di ingresso, comprensivo dell’antenna;
il circuito di elaborazione;
il circuito di sincronizzazione;
il circuito di interfaccia di uscita.
La rete di adattamento, come nel caso del trasmettitore discusso nel paragrafo precedente,
assicura il massimo trasferimento di potenza tra antenna e amplificatore RF; quest’ultimo
è un circuito a tre “porte”, delle quali due di ingresso dedicate ai segnali fp± ∆f ed fLO, e
una di uscita.
Un parametro di progetto fondamentale dell’amplificatore RF è il minimo segnale
rivelabile in relazione al rumore termico generato dal ricevitore stesso nonché al rumore
introdotto dal mezzo di trasmissione.
E’ possibile notare che l’operazione di sintonia agisce anche sull’amplificatore RF: in
pratica la frequenza dell’oscillatore locale, fLO, centra la banda passante dell’amplificatore
19
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
RF in modo che questo amplifichi solo il segnale che si vuole ricevere, eliminando tutti i
canali adiacenti.
Figura 12 - Schema a blocchi di un ricevitore a radio frequenza
Il blocco successivo, denominato Mixer, riceve il segnale dall’amplificatore RF su una
porta, il segnale fLO sull’altra e fornisce in uscita un segnale traslato ad una frequenza
intermedia fIF (IF – Intermediate Frequency) fissa e costante.
Se, con qualche semplificazione, assumiamo che la portante fp e il segnale fLO
dell’oscillatore locale abbiano un’ampiezza unitaria (cioè =1), il mixer non fa altro che
un’operazione di moltiplicazione che possiamo rappresentare con la formula che segue:
v (t ) cos( 2f p t ) cos( 2f LO t )
1
cos 2 f p f LO t cos 2 f p f LO t
2
dove φ rappresenta la differenza di fase fra il segnale dell’oscillatore locale e la portante.
Come si vede dalla formula, ottenuta sviluppando con una semplice operazione di
trigonometria il prodotto di due coseni, il segnale è composto da una parte in cui compare
la somma delle due frequenze
cos[2π(fp + fLO)t + φ]
20
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
e da una parte in cui compare la differenza delle due frequenze
cos[2π(fp - fLO)t + φ]
La parte di segnale che ci interessa è il segnale differenza, che può essere recuperato
attraverso un’operazione di filtraggio.
Quindi l’operazione di sintonia oltre a centrare la banda dell’amplificatore RF sul canale
che vogliamo ricevere deve anche verificare la seguente relazione:
fP – fLO = fIF
E’ chiaro che può esistere anche un segnale ad una frequenza fP’ tale per cui sia anche:
fLO – fP’ = fIF
Tale frequenza è chiamata frequenza immagine poiché dista 2fIF da fP,
cioè fp – fp’ = 2fIF,
interferisce con il segnale che vogliamo ricevere e quindi va eliminata. In genere,
l’eliminazione della frequenza immagine viene effettuata dalla rete adattatrice di ingresso
che funge anche da filtro. Il segnale traslato alla frequenza fIF giunge così all’amplificatore
IF (amplificatore in frequenza intermedia) il quale provvede ad eliminare quanto più
possibile il rumore fuori banda, ed è qui che si ha il maggior contributo all’amplificazione
complessiva del segnale ricevuto. E’ quindi molto importante la selettività di questo
stadio.
L’amplificatore IF è dotato di un sottosistema per il controllo automatico di guadagno
(AGC – Automatic Gain Control). Questo dispositivo fa sì che il segnale in ingresso
all’amplificatore IF sia il più possibile indipendente dal livello del segnale ricevuto.
Naturalmente, in assenza di segnale, l’AGC tende a massimizzare il guadagno per cui
viene amplificato solo il rumore, ma non appena il segnale ricevuto ha una potenza
sufficientemente maggiore di quella del rumore, questo viene praticamente cancellato
(fenomeno chiamato con il termine inglese di “quieting”).
21
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Il blocco successivo si occupa dell’operazione di demodulazione, cioè cerca di ricostruire il
messaggio originario al fine di inviarlo all’amplificatore in banda base (BB) e quindi
all’utilizzatore. Il blocco di demodulazione rappresenta quindi il punto di separazione tra i
sistemi a banda frazionale stretta e quelli a banda frazionale larga.
6.4.2
Il componente di base della stazione di terra, il CC1020
Il circuito integrato scelto come componente di base per la “stazione di terra” è il Chipcon
CC1020, prodotto dalla società norvegese Chipcon AS, una sussidiaria dell’americana
Texas Instruments. Il CC1020 è un dispositivo che realizza le funzioni di un
ricetrasmettitore in banda UHF a bassa potenza e a banda stretta.
E’ un componente largamente usato nelle bande ISM (Industrial, Scientific and Medical) e
SRD (Short Range Device) con frequenze programmabili per operare nelle bande da 402 a
470 MHz e da 804 a 940 MHz, ed è particolarmente adatto per sistemi a banda stretta con
separazione tra i canali di 12,5KHz e 25KHz.
Il componente può essere facilmente programmato e riconfigurato attraverso un bus
seriale (SPI) e ciò lo rende molto flessibile e facile da usare. Le sue caratteristiche principali
sono:
intervallo di frequenza da 402 MHz a 470 MHz;
elevata sensibilità, fino a -118 dBm per canali di 12,5 KHz;
potenza di uscita programmabile;
basso consumo di corrente;
bassa tensione di alimentazione;
piccole dimensioni;
indicatore digital RSSI e carrier sense;
data rate fino a 153.6 Kbaud;
modulazione dati OOK, FSK e GFSK;
22
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
sincronizzazione bit integrata;
mixer a reiezione di immagine;
frequenza programmabile e controllo automatico della frequenza.
Il componente scelto consente di soddisfare molti requisiti, principalmente quelli
riguardanti dimensioni e consumi. Nella seguente Tabella 2 vengono riportate le
condizioni operative del dispositivo.
parametro
valore
valore
valore
minimo
tipico
massimo
note
Intervallo di frequenze
402 MHz 433 MHz 470 MHz programmabile con
passo inferiore a 300 Hz
Intervallo di
temperatura di
funzionamento
-40 °C
Tensione di
alimentazione
2.3 V
+85 °C
3.0 V
3.6 V
Tabella 2 - Caratteristiche generali del CC1020
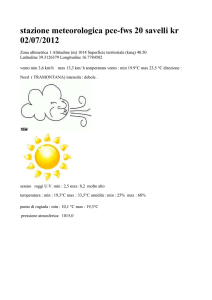
Lo schema a blocchi semplificato del CC1020 viene mostrato nella Figura 13, di fonte
Chipcon, dove è possibile osservare tutte le funzioni base di un ricetrasmettitore, funzioni
di cui abbiamo parlato nei due paragrafi precedenti.
23
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Figura 13 - Schema a blocchi semplificato del circuito integrato CC1020
Il CC1020 è dotato di un ricevitore a bassa frequenza intermedia. Il segnale a
radiofrequenza ricevuto viene amplificato da un amplificatore a basso rumore (LNA e
LNA2) e convertito ad una frequenza intermedia più bassa (IF) in quadratura (I e Q). A
frequenza intermedia i segnali I e Q vengono filtrati, amplificati e successivamente
digitalizzati dai convertitori analogico-digitale (ADC). Il controllo automatico del
guadagno, il filtraggio di canale, la demodulazione e la sincronizzazione dei bit vengono
realizzate direttamente in digitale dal blocco denominato DIGITAL DEMODULATOR. I
dati demodulati vengono forniti in uscita sul piedino DIO direttamente in digitale. Sul
piedino DCLK viene fornito un segnale di clock sincrono con i dati.
La modulazione utilizzata per la ricetrasmissione dei dati a radiofrequenza è di tipo FSK.
La Figura 14 mostra un esempio di modulazione FSK binaria.
24
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Figura 14 - Esempio di modulazione FSK binaria
La traccia gialla rappresenta i dati (linea DIO) che, in questo caso, sono rappresentati da
una semplice onda quadra. La traccia blu mostra, invece, la portante modulata. Si può
notare che la modulazione FSK consiste essenzialmente nella variazione della portante fra
due valori ben stabiliti. In corrispondenza di uno zero logico sulla linea dati, la frequenza
della portante viene diminuita e aumentata nel caso sia presente un livello logico alto. Le
due frequenze di transizione vengono generate dal sintetizzatore digitale e dai blocchi
divisori e sfasatori.
La frequenza sintetizzata e modulata viene inviata direttamente all’amplificatore di
potenza a radiofrequenza (PA).
Qui è presente il circuito di interfaccia di uscita rappresentata da una rete LC esterna che
ne assicura il massimo trasferimento di potenza tra amplificatore a radiofrequenza e
antenna.
25
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
In trasmissione, la frequenza sintetizzata viene inviata direttamente all’amplificatore di
potenza, denominato PA nello schema della Figura 13. L’uscita a radiofrequenza viene
modulata digitalmente in frequenza dalla sequenza dati digitali che arrivano dal piedino
DIO del blocco denominato DIGITAL MODULATOR. Opzionalmente può essere usato un
filtro gaussiano per ottenere una modulazione GFSK (Gaussian Frequency-Shift Keying).
Il sintetizzatore di frequenza include un LC VCO (LC Voltage Controlled Oscillator –
Oscillatore Controllato in Tensione e dotato di un circuito Induttanza Capacità, LC, per
l’immagazzinamento di energia) completamente integrato nel chip e uno sfasatore a 90°
per generare i segnali LO_I e LO_Q per la conversione a una frequenza più bassa in
modalità ricezione.
Il VCO opera nell’intervallo di frequenze da 1,608 GHz a 1,880 GHz. Il piedino CHP_OUT
è l’uscita charge pump (pompaggio di carica) e VC è il nodo di controllo del VCO
integrato nel chip. Un filtro di anello (loop) esterno è messo tra questi due piedini. Un
oscillatore a cristallo viene connesso tra i piedino XOSC_Q1 e XOSC_Q2. Il dispositivo in
uscita fornisce un segnale che indica l’aggancio del PLL (anello ad aggancio di fase).
Per la configurazione del dispositivo viene utilizzata l’interfaccia seriale SPI a quattro fili.
La Figura 15 mostra lo schema elettrico semplificato di connessione del componente, senza
i condensatori di disaccoppiamento dell’alimentazione.
26
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Figura 15 - Schema semplificato di interconnessione del CC1020 (fonte Chipcon AS)
La stazione di terra richiede l’uso di un microcontrollore, che si interfaccia con il CC1020
(vedi Figura 16), per effettuare le funzioni seguenti:
programmare le funzioni del ricetrasmettitore attraverso una interfaccia di
configurazione seriale a quattro fili (PDI, PDO, PCLK e PSEL);
scambiare segnali digitali con l’interfaccia dati sincrona bidirezionale (DIO e DCLK);
codificare e decodificare dati;
monitorare il piedino LOCK per lo stato dell’aggancio della frequenza e lo stato del
rivelatore di portante;
poter eventualmente leggere la telemetria RSSI digitale e altre informazioni sullo stato
del dispositivo attraverso l’interfaccia seriale a quattro fili: questa funzione nel DTS
non è attualmente utilizzata in quanto l’RSSI viene rilevato sulla stazione di terra.
27
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Figura 16 – Interfaccia del microcontrollore con il CC1020
Il microcontrollore sfrutta i piedini di ingresso e di uscita (PDI, PDO, PCLK e PSEL) per
l’interfaccia di configurazione. PDO viene connesso ad un ingresso del microcontrollore
mentre PDI, PCLK e PSEL sono connessi alle uscite del microcontrollore. Un piedino di
ingresso o di uscita può essere non utilizzato se PDI e PDO sono connessi insieme e un
piedino bidirezionale viene usato dal microcontrollore. I piedini del microcontrollore
connessi a PDI, PDO e PCLK possono essere usati per altri propositi quando non viene
utilizzata l’interfaccia di configurazione.
Per quanto riguarda l’interfaccia del segnale digitale un piedino bidirezionale viene usato
per i dati (DIO) che devono essere trasmessi e ricevuti. DCLK fornisce un segnale di
temporizzazione dei dati al microcontrollore. Un altro piedino del microcontrollore può
essere usato per monitorare il segnale di aggancio del PLL.
Il modulo a radio frequenza, come evidenziato in precedenza,
viene configurato
attraverso una semplice interfaccia SPI compatibile a quattro fili. L’interfaccia SPI (Serial
Peripheral Interface, Interfaccia Seriale con le Periferiche) è un sistema di comunicazione
tra un microcontrollore e altri circuiti integrati o tra più microcontrollori. SPI è un bus
standard di comunicazione e la trasmissione avviene tra un dispositivo detto master
(padrone) e uno o più dispositivi detti slave (schiavi o asserviti).
Il master controlla il bus, emette il segnale di clock, decide quando iniziare e terminare la
comunicazione. Il bus SPI è di tipo seriale, sincrono per la presenza di un clock che
28
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
coordina la trasmissione e la ricezione dei singoli bit e che determina la velocità di
trasmissione ed è full-duplex in quanto il colloquio può avvenire contemporaneamente in
trasmissione e ricezione.
I valori dei parametri significativi vengono quindi scritti in registri di controllo interni al
chip attraverso i quali è possibile variare la frequenza portante, la potenza di trasmissione,
l’adiacenza dei canali ecc. Esistono 40 registri di configurazione e 12 registri per il test di
funzioni interne al chip.
Il byte di indirizzamento viene utilizzato anche per specificare una lettura o una scrittura
nel registro relativo. L’indirizzo (Figura 17) è composto da 7 bit mentre l’ultimo bit
specifica il tipo di operazione (R=0, W=1).
8 bit
Indirizzo registro
R/W
7 bit
1 bit
Figura 17 - Il byte di indirizzamento del registro del CC1020
Se viene scritto un registro, si invia l’indirizzo con l’ultimo bit pari a uno seguito dal
valore da memorizzare. I dati vengono scritti sulla linea PDI del chip a radio frequenza.
Il sistema è comunemente definito a quattro fili poiché le linee di connessione che portano
i segnali sono in genere quattro. La trasmissione dei dati sul bus SPI si basa sul
funzionamento dei registri a scorrimento. Ogni dispositivo, sia master che slave, è dotato
di un registro a scorrimento interno i cui bit vengono emessi e, contemporaneamente,
immessi, rispettivamente, tramite l’uscita PDO e l’ingresso PDI. Il dispositivo
ricetrasmettitore CC1020 è lo slave mentre il microcontrollore è il master.
29
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Le seguenti figure mostrano un esempio dei segnali di configurazione dei registri del
CC1020 in fase di scrittura (Figura 18) e in fase di lettura (Figura 19). Le figure sono tratte
dalla documentazione della Chipcon AS.
Figura 18 - Configurazione in scrittura dei registri del CC1020 (fonte: Chipcon AS)
Figura 19 - Configurazione in lettura dei registri del CC1020 (fonte: Chipcon AS)
30
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
La configurazione dei registri in lettura e in scrittura da parte del microcontrollore avviene
attraverso la stessa interfaccia di configurazione.
Figura 20 - Esempio di trasferimento di dati NRZ sincroni
Figura 21 - Esempio di trasferimento di dati codificati Manchester sincroni
31
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Il sottosistema di comunicazione è in grado di trasmettere dati NRZ (Non-Return-to-Zero)
o dati codificati Manchester. La codifica Manchester assicura che il segnale abbia un
componente in Corrente Continua (DC) costante. La Figura 20 e la Figura 21 mostrano
esempi di dati NRZ e codificati Manchester trasmessi e ricevuti.
6.4.3
Le caratteristiche del trasmettitore
Le caratteristiche principali del trasmettitore sono elencate nella seguente Tabella 3.
parametro
valore
Note
Data rate
da 0,45 Kbaud a 153,6
KBaud
Il data rate è
programmabile
Separazione in frequenza per
FSK binaria
108 KHz massimo
Potenza di uscita
da -20 dBm a +10 dBm
Livello armoniche per segnale a
433MHz
-50 dBc (2a armonica)
Emissione spurie
≤ -54 dBm
La potenza di uscita è
programmabile
-50 dBc (3a armonica)
Tabella 3 - Caratteristiche del trasmettitore per il sottosistema di comunicazione
6.4.4
6.4.4.1
Le caratteristiche del ricevitore
Le caratteristiche principali
Le caratteristiche principali del ricevitore sono elencate nella seguente Tabella 4.
parametro
valore
note
Sensibilità per modulazione
FSK (per canalizzazione a
12.5KHz e deviazione di
frequenza di ±2.025KHz)
-118dBm
Sensibilità misurata con
sequenza PN9 con data
rate 2.4KBaud per
BER=10-3
Sensibilità per modulazione
OOK (con codifica
Manchester)
-116dBm (con data rate
2.4Kbaud)
Saturazione del ricevitore
+10dBm
-114dBm (con codifica
Manchester)
-81dBm (con data rate
153.6KBaud)
Sensibilità misurata con
sequenza PN9 per
BER=10-3
Livello massimo di
potenza del segnale di
32
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
ingresso
La larghezza di banda del
filtro è programmabile
Larghezza di banda di rumore
del sistema
da 9.6KHz a 307.2KHz
Figura di rumore
+7dB
Selettività (per canalizzazione
a 12.5KHz)
+41dB
Indica la reiezione delle
spurie in banda
Desensibilizzazione
+50dB (a ±1MHz)
Indica la reiezione delle
spurie fuori banda
+64dB (a ±2MHz)
+64dB (a ±5MHz)
+75dB (a ±10MHz)
Reiezione del canale
immagine
+26dB (senza calibrazione)
Soppressione frequenza
immagine
+36dB (senza calibrazione)
LO leakage
< -80dBm
VCO leakage
-64dBm
Emissione spurie
< -60dBm
Offset sincronizzazione bit
8000ppm
Latenza dei dati
4 Baud (con codifica NRZ)
+49dB (con calibrazione)
+59dB (con calibrazione)
8 Baud (con codifica
Manchester)
Tabella 4 - Caratteristiche del ricevitore per il sottosistema di comunicazione
6.4.4.2
La frequenza intermedia (IF)
La scelta della frequenza intermedia è vincolata al fatto che il filtro analogico dopo il
mixer, integrato nel chip, viene utilizzato per filtraggio a larga banda e anti-alias che è
importante per bloccare segnali a 1 MHz e a distanze più ampie in frequenza. Questo filtro
è centrato sulla frequenza intermedia nominale di 307,2 KHz. La larghezza di banda del
filtro analogico è di circa 160 KHz. Il filtro analogico può essere anche bypassato
programmando il chip ma in questo caso il filtraggio a 1 MHz e a offset maggiori sarà
degradato. La Tabella 5 seguente descrive le caratteristiche principali della sezione a
frequenza intermedia.
33
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
parametro
valore
note
Frequenza intermedia
307,2KHz
Larghezza di banda del da 9,6KHz a 307,2KHz La larghezza del filtro
filtro di canale digitale
digitale è programmabile
Tabella 5 - Caratteristiche della sezione a frequenza intermedia del sottosistema di comunicazione
Al fine di soddisfare i diversi requisiti di larghezza di canale, la larghezza di banda del
filtro di canale, il ricevitore è programmabile. La larghezza di banda minima del filtro di
canale del ricevitore dipende dal baud rate, dalla distanza tra le frequenze e dalla
tolleranza dell’oscillatore a cristallo. La larghezza di banda del segnale deve essere più
piccola della larghezza del filtro di canale del ricevitore disponibile.
6.4.4.3
La generazione della frequenza di riferimento
La frequenza di riferimento per il modulo RF è generata da un oscillatore al cristallo. Le
caratteristiche principali dell’oscillatore a cristallo sono descritte nella Tabella 6.
parametro
valore
Frequenza dell’oscillatore a cristallo
14,7456 MHz
Accuratezza della frequenza di riferimento ±5,7 ppm
Tabella 6 - Caratteristiche dell’oscillatore a cristallo per il sottosistema di comunicazione
L’accuratezza della frequenza di riferimento dipende dalla tolleranza iniziale a dalle
variazioni dovute alla dipendenza dal tempo e dalla temperatura. Questa accuratezza può
essere migliorata sfruttando la programmabilità della frequenza PLL ad elevata agilità, a
piccoli passi, e la funzione AFC (Automatic Frequency Control). La funzione di controllo
automatico della frequenza è una funzione del componente che è in grado di compensare
le variazioni della frequenza. Tale funzione memorizza l’offset medio della frequenza e lo
utilizza per compensare la variazione.
34
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
La frequenza del cristallo viene inoltre utilizzata come riferimento per il data rate (in
italiano: la cadenza dei dati digitali).
6.4.4.4
Il sintetizzatore di frequenza
La Tabella 7 riporta le caratteristiche principali del sintetizzatore di frequenza.
parametro
valore
note
Rumore di fase (per
canalizzazione a 12.5KHz)
-90 dBc/Hz a 12,5 KHz
-100 dBc/Hz a 25 KHz
-105 dBc/Hz a 50 KHz
-110 dBc/Hz a 100 KHz
-114 dBc/Hz a 1 MHz
2,7 KHz
Portante non modulata
a 433 MHz
Larghezza di banda del
filtro di loop (anello) del
PLL (per canalizzazione a
12,5 KHz)
Tempo di aggancio del
PLL (da ricezione a
trasmissione e viceversa,
per canalizzazione a 12,5
KHz)
Tempo di aggancio del
PLL all’accensione
(per canalizzazione a
12,5KHz)
Dopo calibrazione PLL e
VCO.
La larghezza di banda del
filtro di loop del PLL è
programmabile
900 µs
3,2 ms
Tabella 7 - Caratteristiche del sintetizzatore di frequenza per il sottosistema di comunicazione
6.5
L’antenna della stazione di terra
L’antenna della GS, montata direttamente sul modulo RF, è un’antenna a monopolo
(adattata a 50 Ohm) avente una lunghezza pari a 16,4 cm.
7. Il consumo di potenza elettrica della stazione di terra
La stazione di terra in banda UHF è caratterizzato da un consumo di potenza molto basso
che lo rende particolarmente adatto ad alimentarlo direttamente dalla porta USB, per la
quale gli assorbimenti di corrente devono essere ridotti (fino a 500mA). Gli assorbimenti di
corrente del modulo RF sono descritti nella Tabella 8.
35
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
parametro
valore
Assorbimento di
corrente in ricezione
Assorbimento di
corrente in trasmissione
19,9 mA
Assorbimento di
corrente dell’oscillatore
a cristallo, del
sintetizzatore di
frequenza e resto del
circuito
note
12,3 mA ÷ 14,5 mA (POUT=-20
dBm)
14,4 mA ÷ 17,0 mA (POUT=-5dBm)
16,2 mA ÷ 20,5 mA (POUT=0dBm)
20,5mA ÷ 25,1mA (POUT=+5 dBm)
27,1 mA (POUT=+10 dBm)
7,5 mA
Utilizzando un oscillatore a
cristallo a 14,7456 MHz
Tabella 8 - Assorbimenti di corrente del sottosistema di comunicazione
Il massimo assorbimento di corrente è circa 35 mA: alimentando il circuito con 3,3 V, il
corrispondente consumo di potenza massimo risulta poco più di 100 mW.
La tensione di alimentazione disponibile è di 5 V. Per ridurla al valore di 3,3 V si utilizza
un regolatore serie, come già descritto nel paragrafo 5.1; questa configurazione comporta
un aumento dei consumi di potenza che, nonostante tutto, continuano ad essere molto
bassi. Il consumo di potenza massimo reale, includendo cioè le perdite nel regolatore serie,
è inferiore ai 200 mW.
8. Le interfacce della stazione di terra
Si riassumono in questo paragrafo tutte le interfacce della stazione di terra del DTS.
8.1
Le interfacce elettriche
L’interfaccia elettrica del sottosistema di comunicazione ha le seguenti caratteristiche:
tensione di alimentazione: 5V, BUS USB regolato;
corrente assorbita: 20mA;
36
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
tipo di interfaccia dati verso il modulo RF: SPI;
tipo interfaccia dati verso il personal computer: USB;
tipo di protocollo: standard AX.25 o proprietario IMT;
telemetrie: corrente consumata, stato PLL, temperatura, potenza trasmessa;
Le interfacce della stazione di terra sono quindi sia di tipo alimentazione che di tipo dati.
8.2
Le interfacce meccaniche
La stazione di terra non necessita di fissaggio in quanto viene fornita con torrette di
stanziatrici di 1,5 cm.
8.3
Requisiti particolari dovuti all’ambiente di funzionamento
La stazione di terra funziona all’interno di un edificio scolastico e non vi sono particolari
requisiti inerenti a vibrazioni, accelerazioni e radiazioni.
8.4
Requisiti di interfaccia termica
La stazione di terra è progettata per funzionare nella gamma di temperatura da – 40°C a +
85°C, e quindi dal punto di vista termico non pone problemi particolari.
8.5
Interfacce di programmazione ad uso didattico
La stazione di terra è completamente interfacciabile con un PC attraverso il quale è
possibile definire molte caratteristiche del DTS e controllare le prestazioni dell’apparato
stesso.
La comunicazione con il computer avviene mediante porta USB con connettore standard
micro USB.
Il software utilizzato per la gestione e il controllo del dimostratore tecnologico satellitare
funziona su sistemi operativi Windows XP e superiori.
37
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
9. La realizzazione della stazione di terra
La stazione di terra è assiemata su di una scheda a circuito stampato, che comprende sia la
parte di elaborazione che quella a radio frequenza. La sola parte che si trova al di fuori
della scheda è l’antenna, che viene montata sul modulo RF tramite connettore SMA.
La Figura 22 mostra il lato superiore del circuito stampato, la Figura 23 mostra il lato
inferiore.
Figura 22 - Il lato superiore del circuito stampato
Figura 23 - Il lato inferiore del circuito stampato
Sulla scheda sono presenti inoltre quattro LED (diodi emettitori di luce):
LED rosso che segnala quando è in corso una trasmissione sulla portante RF;
LED giallo che segnala quando il modulo RF è in ricezione;
LED rosso che segnala quando è in corso una trasmissione sulla porta USB;
LED giallo che segnala quando la porta USB è in ricezione.
38
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Sono presenti infine dei condensatori ceramici e al tantalio per il disaccoppiamento
dell’alimentazione. La scheda riceve quindi la tensione dalla porta USB a 5 V per poi
convertirla a 3,3 V tramite un regolatore lineare LDO (Low Drop Out).
39
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Documento:
La stazione di terra del Dimostratore Tecnologico Satellitare (DTS)
Testi:
Michele Marino
Illustrazioni:
Michele Marino
40
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati