MECCATRONICA
Moduli 1 - 4
conoscenze fondamentali
competenze interculturale,
gestione del progetto
tecnica pneumatica
azionamenti elettrici e
controlli automatici
Manuale
(concetto)
Concetto europeo per la Formazione Continua in Meccatronica di
personale esperto nella produzione industriale globalizzata
Progetto UE no. 2005-146319 „Minos“, durata dal 2005 al 2007
Progetto UE no. DE/08/LLP-LdV/TOI/147110 „MINOS++“, durata dal 2008
al 2010
Il presente progetto è finanziato con il
sostegno della Commissione europea.
L´autore è il solo responsabile di questa
pubblicazione (comunicazione) e la
Commissione declina ogni responsabilità
sull´uso che potrà essere fatto delle
informazioni in essa contenute.
www.minos-mechatronic.eu
Partners per la creazione, valutazione e diffusione dei progetti
MINOS e MINOS**.
-
Chemnitz University of Technology, Institute for Machine
Tools and Production Processes, Germany
np – neugebauer und partner OhG, Germany
Henschke Consulting, Germany
Corvinus University of Budapest, Hungary
Wroclaw University of Technology, Poland
IMH, Machine Tool Institute, Spain
Brno University of Technology, Czech Republic
CICmargune, Spain
University of Naples Federico II, Italy
Unis a.s. company, Czech Republic
Blumenbecker Prag s.r.o., Czech Republic
Tower Automotive Sud S.r.l., Italy
Bildungs-Werkstatt Chemnitz gGmbH, Germany
Verbundinitiative Maschinenbau Sachsen VEMAS, Germany
Euroregionala IHK, Poland
Korff Isomatic sp.z.o.o. Wroclaw, Polen
Euroregionale Industrie- und Handelskammer Jelenia Gora,
Poland
Dunaferr Metallwerke Dunajvaros, Hungary
Knorr-Bremse Kft. Kecskemet, Hungary
Nationales Institut für berufliche Bildung Budapest, Hungary
Christian Stöhr Unternehmensberatung, Germany
Universität Stockholm, Institut für Soziologie, Sweden
Articolazione del materiale didattico
Minos : moduli 1 – 8 (manuale, soluzioni e esercizi): Conoscenze
fondamentali/ competenze interculturale, gestione del progetto/
tecnica pneumatica/ azionamenti elettrici e controlli automatici/
componenti meccatronici/ sistemi meccatronici e funzioni/ attivazione,
sicurezza e teleservizio/ manutenzione remota e diagnosi
Minos **: moduli 9 – 12 (manuale, soluzioni e esercizi):
Prototipazione Rapida/ robotica/ migrazione/ Interfacce
Tutti i moduli sono disponibili nelle seguenti lingue: tedesco, inglese,
spagnolo, italiano, polacco, ceco e ungherese
Per ulteriori informazioni si prega di contattare
Dr.-Ing. Andreas Hirsch
Technische Universität Chemnitz
Reichenhainer Straße 70, 09107 Chemnitz
Tel.: + 49(0)0371 531-23500
Fax.: + 49(0)0371 531-23509
Email: [email protected]
Internet: www.tu-chemnitz.de/mb/WerkzMasch oder www.minos-mechatronic.eu
MECCATRONICA
Modulo 1: conoscenze
fondamentali
Manuale
(concetto)
Matthias Römer
Università Tecnica di Chemnitz,
Germania
Concetto europeo per la Formazione Continua in Meccatronica di
personale esperto nella produzione industriale globalizzata
Progetto UE no. 2005-146319 „Minos“, durata dal 2005 al 2007
Progetto UE no. DE/08/LLP-LdV/TOI/147110 „MINOS++“, durata dal 2008
al 2010
Il presente progetto è finanziato con il
sostegno della Commissione europea.
L´autore è il solo responsabile di questa
pubblicazione (comunicazione) e la
Commissione declina ogni responsabilità
sull´uso che potrà essere fatto delle
informazioni in essa contenute.
www.minos-mechatronic.eu
Conoscenze fondamentali
Minos
Contenuto:
1
Matematica tecnica......................................................................................................................................7
1.1
Tipi di operazione aritmetiche..................................................................................................................7
Ordine di operazioni
Calcoli con numeri di segni diversi
Riferimenti generali alla moltiplicazione di parentesi
1.2
Calcolo con frazioni ................................................................................................................................. 10
Definizioni di frazioni
Riduzioni e ampliamenti di frazioni
Addizione con frazioni
Moltiplicazione e divisione di frazioni
Calcoli di frazioni con l‘uso di calcolatrici
1.3
Tipi di calcoli elevati ................................................................................................................................ 14
Calcoli con potenze a base dieci
Calcoli di potenze con calcolatrici
Moltiplicazione e divisione di esponenti
Addizione e sottrazione di esponenti
Calcolo di radici
1.4
Numeri binari.............................................................................................................................................. 20
Conversione di binari
Addizione di binari
Sottrazione di binari
1.4.1
Numeri binari nel computer.................................................................................................................. 22
1.5
Calcoli con variabili .....……………………………………………………………………24
Regole di mettere ed risolvere parentesi
Calcolare equazioni
1.6
1.6.1
Calcolo della percentuale....................................................................................................................... 25
Calcolo degli interessi ............................................................................................................................. 26
1.7
1.7.1
1.7.2
1.7.3
1.7.4
1.7.5
1.7.6
Geometria ................................................................................................................................................... 28
Angolo........................................................................................................................................................... 28
Quadrangolo .............................................................................................................................................. 30
Triangolo ...................................................................................................................................................... 32
Funzioni trigoniometriche..................................................................................................................... 35
Cerchio.......................................................................................................................................................... 37
Corpo ............................................................................................................................................................ 38
3
Minos
Conoscenze fondamentali
2
Fisica tenica ................................................................................................................................................ 41
2.1
2.1.1
2.1.2
Conoscenze fondamentali fisici….....……………………………………………………..41
Grandezze e unità fisiche........................................................................................................................ 41
Equazioni fisiche........................................................................................................................................ 43
2.2
2.2.1
2.2.2
Forza............................................................................................................................................................... 44
Addizione di forze..................................................................................................................................... 45
Decomposizione di forze........................................................................................................................ 49
2.3
Momento di una forza (momento torcente) .................................................................................. 50
2.4
Equilibrio delle forze e dei momenti torcenti................................................................................. 52
2.5
Principio di leva.......................................................................................................................................... 53
2.6
2.6.1
2.6.2
2.6.3
2.6.4
Pressione....................................................................................................................................................... 54
Trasmissione di forza................................................................................................................................ 56
Trasmissione di pressione....................................................................................................................... 58
La legge del gas......................................................................................................................................... 59
Materie correnti.......................................................................................................................................... 61
2.7
Tensione ....................................................................................................................................................... 62
2.8
Frizione ......................................................................................................................................................... 64
2.9
2.9.1
2.9.2
2.9.3
Distanza, velocità e accelerazione....................................................................................................... 66
Moto uniforme .......................................................................................................................................... 66
Moto accelerato......................................................................................................................................... 67
Forze su corpi mobili................................................................................................................................ 70
2.10 Rotazione ..................................................................................................................................................... 72
2.10.1 Velocità angolare....................................................................................................................................... 74
2.10.2 Accelerazione angolare........................................................................................................................... 75
2.11
2.11.1
2.11.2
2.11.3
2.11.4
2.11.5
Lavoro, energia e potenza...................................................................................................................... 76
Lavoro............................................................................................................................................................ 76
Energia .......................................................................................................................................................... 79
Principio della conservazione dell‘energia....................................................................................... 81
Potenza.......................................................................................................................................................... 82
Coefficiente di efficienza........................................................................................................................ 83
2.12
2.12.1
2.12.2
2.12.3
2.12.4
Termodinamica ......................................................................................................................................... 84
Temperatura................................................................................................................................................ 84
Dilatazione di corpi solidi....................................................................................................................... 85
Dilatazioni dei gas .................................................................................................................................... 86
Energia termica e capacità termica..................................................................................................... 87
4
Conoscenze fondamentali
Minos
3
Disegno tecnico......................................................................................................................................... 89
3.1
3.1.1
3.1.2
3.1.3
3.1.4
3.1.5
Fondamenti del disegno tecnico......................................................................................................... 89
Il disegno tecnico come mezzo della comunicazione ................................................................ 89
Tipi di disegni.............................................................................................................................................. 90
Formati della carta.................................................................................................................................... 92
Campo tipografico e liste dei pezzi..................................................................................................... 94
Scale............................................................................................................................................................... 96
3.2
3.2.1
3.2.2
3.2.3
Descrizioni in disegni ............................................................................................................................. 97
Vedute........................................................................................................................................................... 97
Tipi e spessori di linea ............................................................................................................................. 98
Sezioni ......................................................................................................................................................... 99
3.3
3.3.1
3.3.2
Indicazione di misure in disegni ...................................................................................................... 101
Linee di misure, linee ausiliare di misure e i valori delle misure............................................ 101
Particolarità di dimensionamento.................................................................................................... 102
3.4
3.4.1
Proprietà della superficie..................................................................................................................... 104
Rappresentazione delle proprietà della superficie nel disegno............................................ 106
3.5
3.5.1
3.5.2
Tolleranze di forme e posizione......................................................................................................... 107
Tolleranze dimensionali.........................................................................................................................111
Accoppiamenti......................................................................................................................................... 114
3.6
3.6.1
3.6.2
Disegni tecnici e computer.................................................................................................................. 116
CAD.............................................................................................................................................................. 116
Macchine col controllo numerico..................................................................................................... 118
5
Conoscenze fondamentali
1
Matematica tecnica
1.1
Tipi di operazioni aritmetiche
Minos
Le operazioni aritmetiche tradizionali includono l’addizione, la sottrazione,
la moltiplicazione e la divisione.
Moltiplicazione sta per moltiplicazione dei numeri. Mentre la divisione è
l’operazione inversa di essa, consiste infatti nel dividere un numero da
un’altro. La moltiplicazione e la divisione hanno un ordine di priorità più
rispetto all’addizione e la sottrazione, per questo devono essere eseguiti
per primi.
Importante
La moltiplicazione e la divisione devono essere eseguiti prima
dell’addizione e la sottrazione!
La moltiplicazione si esegue addizionando più volte lo stesso numero. In
questo modo 3 + 3 + 3 + 3 è uguale a 4 · 3. In molti documenti si utilizza
il simbolo * al posto del punto (·) per la moltiplicazione.
Ripetendo la moltiplicazione dello stesso numero si giunge alla potenza.
Per esempio 3 · 3 · 3 · 3 è uguale a 34.
Il calcolo della potenza ha un ordine di priorità più alta rispetto a quello
della moltiplicazione e della divisione, per questo va eseguito per primo.
Importante
La calcolazione della potenza deve essere eseguita prima della moltiplicazione e la divisione!
Nell’oerdine di priorità le parentesi hanno una priorità maggiore. I valori
all’interno delle parentesi devono essere calcolati sempre per primi.
Importante
Esempio
I valori nelle parentesi devono essere calcolati sempre per primi.
3+5=8
12 – 5 = 7
3 · 5 = 15
20 : 4 = 5
4 + 2 · 3 = 4 + 6 = 10
(4 + 2) · 3 = 6 · 3 = 18
7
Conoscenze fondamentali
Minos
Consigli
Esercizio
Problemi semplici possono essere svolti a mente. Spesso però ci serviamo dell’ausilio di una calcolatrice. Va notato però che molte calcolatrici
sono in grado di calcolare operazioni soltanto in maniera separata, ovvero
un’operazione alla volta, mentre in altre si possono inserire le formule
complete e lasciare che sia la macchina ad eseguirle. Ad ogni modo è
sempre la persona il responsabile circa le formule matematiche. Usando
macchina sia in grado di distinguire l’ordine di priorità: ovvero moltiplicazione e divisione prima dell’addizione e della sottrazione.
Risolvete il problema 1 dell’eserciziario!
Facendo la sottrazione può succedere che il secondo valore sia maggiore
al primo. Il risultato è un numero negativo preceduto dal segno meno. Il
simbolo positivo invece, va collocato dinanzi ai valori positivi, ma di solito
viene omesso. Per evitare il susseguirsi di due simboli algebrici, si usa
mettere il numero con il rispettivo segno in una parentesi.
Quando si addiziona o si sottrae, i simboli e i segni algebrici simili,
vengono sostituiti dal segno più . Mentre, il simbolo meno sostituisce
differenti simboli e segni di operazione. Questo deve essere eseguito
individualmente per ogni singola parentesi.
Esempio
8 – 14 = – 6
4+(+5)=4+5=9
4–(–5)=4+5=9
5–(+4)=5–4=1
5+(–4)=5–4=1
Esercizio
Risolvete il problema 2 dell‘eserciziario!
Se in una parentesi si trovano diversi addendi, bisogna individuare di
Esempio
– ( 5 + 6 ) = – 5 + ( – 6 ) = – 5 – 6 = – 11
–(5–6)=–5+(+6)=–5+6=1
–(a+b+c)=–a+(–b)+(-c)=–a–b–c
–(–a+b–c)=+a+(–b)+(+c)=a–b+c
Esercizio
8
Risolvete il problema 3 dell‘eserciziario!
Conoscenze fondamentali
Minos
La regola della sostituzione dei segni e simboli simili e non, vale anche
per la moltiplicazione e la divisione.
Esempio
( + 5 ) · ( + 6 ) = + 30
( – 5 ) · ( – 6 ) = + 30
( + 5 ) · ( – 6 ) = – 30
( – 18 ) : ( – 6 ) = + 3
( – 18 ) : ( + 6 ) = – 3
Esercizio
Risolvete il problema 4 dell’eserciziario!
Nell’addizione e nella moltiplicazione l’ordine di successione dei due addendi, cioè i fattori, può essere cambiato. Questa regola viene chiamata
la legge commutativa, che può essere descritta nella modo seguente:
a+b=b+a
a·b=b·a
Inoltre va aggiunto che l’ordine di successione di operazioni aritmetiche
simili, non è importante per l’addizione e per la moltiplicazione. Questa
possono essere anche omesse.
a+(b+c)=(a+b)+c
a·(b·c)=(a·b)·c
Se viene moltiplicato un valore con una parentesi contenente una somma, allora ogni valore all’interno della parentesi deve essere moltiplicato
per il valore al di fuori di essa. Questo processo viene chiamato, legge
di distribuzione.
a·(b+c)=a·b+a·c
Se all’interno di due parentesi moltiplicate si trovano più addendi, allora
ognuno di essi deve essere moltiplicato per tutti gli altri. Il simbolo della
moltiplicazione viene omesso di solito se si calcola con le variabili.
( a + b ) · ( c + d ) = a · ( c + d ) + b · ( c + d ) = ac + ad + bc + bd
"gine 1). La moltiplicazione di due segmenti (a+b) e (c+d) è uguale alla
#
costituiti da due parti a e b, come anche c e d. Componendo insieme i
quattro elementi dell’area, si ottiene di nuovo un rettangolo.
9
Conoscenze fondamentali
Minos
b ·d
d
a ·c
b ·c
a
b
c+ d
a ·d
c
a+b
Quando si usa la legge di distribuzione da destra a sinistra, quest‘operazione
viene chiamata esclusione, cioè mettere fuori dalla parentesi. Se addendi
diversi hanno un fattore comune, quest’ultimo può essere posizionato
fuori dalle parentesi.
Esempio
ab + ac = a ( b + c )
15x – 5y = 5 ( 3x – y )
Esercizio
1.2
Risolvete il problema 2 dell‘eserciziario!
Calcolo con le frazioni
Dividendo una cifra in gruppi di identici, non è sempre possibile ottenere
un risultato composto da numeri interi. Ad esempio possiamo dividere
sei mele in tre gruppi, ogni gruppo riceve due mele. Mentre se si intende
dividire una mela in tre parti uguali, essa deve essere tagliata. Questo
tipo di operazione può essere descritta in forma di frazione:
Il numero sopra la barra di frazione è chiamato numeratore, mentre il
numero sottostante denominatore.
Il denominatore indica in quante parti deve essere diviso il totale. Il numeratore invece indica quante di queste parti sono presenti.
10
Conoscenze fondamentali
Minos
Adesso è possibile dividere la mela anche in sei pezzi e distribuire ad
#
tore e il denominatore per due. La moltiplicazione del numeratore e del
denominatore per lo stesso numero viene chiamata anche ampliamento
di frazione. L’ampliamento di frazione si usa quando le frazioni devono
essere addizionate o sottratte.
Esempio
$
minatore per lo stesso numero. L’ampliamento e la riduzione delle frazioni
non cambia il loro valore. Attraverso la riduzione si possono rendere le
cifre più piccole e in questo modo più facili da calcolare.
Importante
Esercizio
L’ampliamento o la riduzione delle frazioni non può essere eseguito con
il numero 0.
Risolvete il problema 6 dell’eserciziario!
Le frazioni possono essere addizionate o sottratte solo quando hanno un
denominatore comune. Se si devono addizionare o sottrarre frazioni che
hanno denominatori diversi, quest’ultimi dovranno essere portati prima
allo stesso valore attraverso l’ampliamento di una o entrambe le frazioni.
I numeri interi devono essere convertiti in frazione con il denominatore
uguale a 1 e il valore del numeratore uguale a quello del numero intero.
Ora è possibile addizionare o sottrarre i numeratori delle frazioni. Il denominatore rimane invariato.
11
Conoscenze fondamentali
Minos
Se il denominatore comune non è immediatamente riconoscibile, può essere calcolato moltiplicando i due denominatori. Il risultante denominatore
comune non deve essere necessariamente il minore dei denominatori
comuni possibili. Il risultato è comunque corretto.
Esempio
Nel primo caso la prima frazione è stata ampliata con 2, con il risultante
denominatore comune 4. Nel secondo caso invece, il denominatore
comune 8 è stato ricavato moltiplicando entrambi i denominatori 2 e 4
con l’ampliamento relativo delle due frazioni. Finalmente il risultato della
frazione è stato ridotto. Entrambi i calcoli dimostrano che la metà di una
mela e un quarto di una mela formano insieme tre quarti di una mela.
Esercizio
Risolvete il problema 7 dell‘eserciziario!
La moltiplicazione e la divisione tra frazioni è più semplice rispetto
all’addizione perché non c’è bisogno di calcolare il comune denominatore.
Per moltiplicazione di frazioni si intende semplicemente la moltiplicazione
di entrambi i numeratori e denominatori. Le frazioni possono essere col
$%
&
$'
i numeri così ridotti il calcolo diventa più facile.
Esempio
Esercizio
Risolvete il problema 8 dell‘eserciziario!
Per eseguire una divisione tra frazioni, si deve prima trasformala in una
moltiplicazione. Per fare questo è necessario trovare il valore reciproco
con il quale si andrà a dividire la frazione. Quest’ultimo si ottiene scambiando il denominatore con il numeratore. La divisione avviene quindi
dalla moltiplicazione della frazione reciproca.
Esempio
Esercizio
12
Risolvete il problema 9 dell‘eserciziario!
Conoscenze fondamentali
Minos
Se si calcolano le frazioni con una calcolatrice si deve fare attenzione
che i calcolatori non consentano l’esecuzione diretta delle frazioni.
L’esecuzione dovrà essere svolta separatamente, una ad una.
Esempio
Si ottiene un risultato sbagliato calcolando la frazione in questo modo:
3 : 2 · 5 = 7,5
La differenza è chiara invece se l’operazione viene introdotta come una
frazione:
Per calcolare quest’esempio correttamente con la calcolatrice, le operazioni devono essere scritte in questo modo:
3 : 2 : 5 = 0,3
La divisione per 5 deve essere successiva perchè il numero 5 appartiene
al denominatore.
Ovviamente è possibile calcolare il valore del denominatore prima di
dividere il numeratore per quest’ultimo. Questo calcolo è necessario
anche quando il denominatore contiene un’addizione o una sottrazione:
Esempio
L’addizione nel numeratore deve essere calcolata con la stessa priorità
come se trovasse all´interno di una parentesi. Quindi facendo il calcolo
l ´addizione deve essere eseguita prima della divisione:
3 : ( 2 + 5 ) = 0,428571...
La formula calcolata è chiamata frazione decimale. In questa forma la
$
Nella parte sinistra della virgola si trovano le unità, le decine, le centinaia. Nella parte destra invece i decimi, i centesimi, i millesimi e così via.
Nel caso di frazioni, come nell`esempio, il numero dei posti dopo la virgola che si vedono sullo schermo della calcolatrice, è limitato soltanto
&
Se si calcolano altri posti ci si rende subito conto che i primi sei dopo la
13
Minos
Conoscenze fondamentali
Le frazioni decimali continue/periodiche sono rappresentate da una linea
posta al di sopra i numeri che si ripetono in modo periodico.
A seconda della richiesta precisione la frazione può essere arrotondata.
L‘ultima cifra che deve essere mantenuta, rimane immutata se seguita
dal numero 0, 1, 2, 3 o 4. Mentre bisognerà aggiungere all´ultima cifra il
numero 1 se seguita dai numeri 5, 6, 7, 8, 9.
Qui un´esempio della frazione soprastante arrotondata da due o tre cifre
dopo la virgola:
L‘arrotondamento causa sicuramente un´errore di calcolazione. In genere
i numeri arrotondati dovrebbero avere uno o due cifre in più rispetto ai
numeri usati all‘inizio del calcolo. Un arrotondamento di più cifre fa accrescere il tempo di calcolazione.
1.3
Tipi di calcoli elevati
Già come mostrato nelle operazioni aritmetiche di base, l´addizione
multipla di un determinato valore equivale alla moltiplicazione. Le moltiplicazioni ripetute per uno stesso valore conducono alla calcolazione
potenziata.
Nella calcolazione potenziata, il numero che deve essere moltiplicato è
chiamato numero di base o cardinale. L‘esponente, che viene scritto in
apice alla base, indica per quante volte il numero deve essere moltiplicato.
In geometria, per calcolare l`area A di un quadrato, devono essere
moltiplicati tra loro entrambe i lati uguali di a. Nel caso di un cubo viene
moltiplicata la base quadrata
A = a · a = a2
V = a · a · a = a3
Di conseguenza, le unita sono moltiplicate. L´area viene indicata con m2
, il volume con m3.
14
Conoscenze fondamentali
Esempio
Minos
La lunghezza del lato di un cubo è 3m. Qual‘è il volume?
V = 3 m · 3 m · 3 m = 33 m3 = 27 m3
L‘esponente può anche prendere la forma di una frazione decimale.
Questo conduce al calcolo delle radici. Nel caso che un esponente sia
negativo, lo si può trasformare in esponente positivo posizionando l´ intera
potenza nel denominatore di una frazione, 3-2 = 1/32 = 1/9
Importante
Un numero qualunque con l‘esponente uguale a 0 è sempre uguale a 1.
Importante
Un numero qualunque con l‘esponente uguale a 1 da sempre uno, perchè
esiste soltanto una volta come fattore della moltiplicazione.
Esempio
26 = 2 · 2 · 2 · 2 · 2 · 2
62 = 6 · 6
60 = 1
61 = 6
6–2 = 1/62 = 1/36
Esercizio
Risolvete il problema 10 dell‘eserciziario!
15
Conoscenze fondamentali
Minos
Le potenze con il numero 10 alla base hanno una certa importanza. Vengono chiamate potenze a base dieci (potenze di dieci) e vengono usate
soprattuto per esprimere numeri molto grandi o molto piccoli.
Il calcolo delle potenze a base dieci è molto facile. L’esponente indica
;<
ro di volte che il punto decimale deve essere spostato alla del numero 1 .
L’esponente negativo mostra di quante posizioni deve essere spostata
la virgola a sinistra del numero 1.
106 = 1000000
102 = 100
100 = 1
10–2 = 0,01
10–3 = 0,001
È più facile esprimere numeri grandi e piccoli in combinazione con le potenze decimali. In questo caso il numero viene espresso come una cifra
>$
quante volte si deve spostare la virgola.
C’è anche la possibilità di usare le potenze a base dieci con 3 esponenti
di divisione, quali 3, 6 e 9, e così -3, -6 e -9. Questi si possono sostituire
X
X
e giga, oppure mili, micro e nano.
Esempio
125000 = 1,25 · 105 = 125 · 103
0,000125 = 1,25 · 10–4 = 125 · 10–6
1 km = 103 m = 1000 m
1 nm = 10–9 m = 0,000000001 m
16
Conoscenze fondamentali
Esercizio
Minos
Risolvete i problemi 11 e 12 dell’eserciziario!
Non tutte le calcolatrici hanno l’opzione del calcolo della potenza. Le
calcolatrici che offrono la possibilità di fare calcoli elevati, sono chiamate
Per calcolare potenze alla seconda o alla terza di solito nelle calcolatrici
ci sono pulsanti separati x2 e x3. Il pulsante xy si usa per calcolare altre
potenze.
Per le potenze a base dieci si usa il tasto EXP. A seconda del modello
della calcolatrice, nel display viene riservata una posizione per indicare
le potenze a base dieci..........
Esercizio
%
e digitando i numeri dell’esercizio precedente.
17
Conoscenze fondamentali
Minos
L‘addizione delle potenze è possibile soltanto nel caso in cui la base e
l‘esponente delle potenze che devono essere addizionate, sono uguali.
Questo addizioni vengono eseguite spesso quando la base è una variabile.
2x2 + 5x2 = 7x2
1,5a7 + 3,6a7 = 5,1a7
La moltiplicazione di una potenza è possibile soltanto quando la base
o l‘esponente sono uguali. Quando le basi sono uguali, gli esponenti
vengono addizionati, mentre con esponenti uguali le basi vengono moltiplicate .
an · am = a(n+m)
an · bn = (a · b)n
Allo stesso modo, quando si dividono potenze con la stessa base, gli
esponenti vengono sottratti. Quando si dividono le potenze che hanno
gli stessi esponenti, una basa viene divisa dall’altra.
Facendo il calcolo delle potenze, entrambi gli esponenti vengono moltiplicate fra loro. Così si possono rappresentare anche numeri molto grandi
o molto piccoli in maniera abbreviata.
(am)n = aZ
Esempio
x2 · x3 = (x · x) · (x · x · x) = x(2+3) = x5
x5 · x–2 = x(5–2) = x3
x5 · y5 = (x · y)5
(1010)10 = 10";[Z;[\ = 10100, una1 con 100 volte zero.
18
Conoscenze fondamentali
Esercizio
Minos
Risolvete il problema 13 dell‘eserciziario!
Se vogliamo conoscere la lunghezza di un lato di un quadrato di cui conosciamo l’area, allora cacolaremo la sua radice. Questo tipo
di calcolo viene anche chiamato estrazione della radice o radicale. Per
esempio, se un quadrato ha un area di 4 m2, la lunghezza del lato è 2m.
In questo caso è stata calcolata la radice quadrata. Questo calcolo viene
rappresentato nel modo seguente:
%
valore numerico che se moltiplicato per se stesso ci risulta questo numero.
Siccome questo calcolo non è così facile, ogni calcolatrice possiede un
tasto per la individuazione della radice.
La radice può essere anche rappresentata sotto forma di potenza utilizzando l’esponente nella forma di frazione, invece di utilizzare il segno
della radice. Anche altre frazioni possono essere rappresentate come
esponenti. Bisogna prendere ora in considerazione la radice cubica. Con
essa è possibile calcolare la lunghezza di un lato con il volume conosciuto.
Esercizio
Risolvete il problema 14 dell´eserciziario!
19
Minos
1.4
Conoscenze fondamentali
Numeri binari
Nel nostro sistema numerico decimale vengono utilizzate dieci cifre da
0 a 9.Le cifre grandi sono composte dall’insieme di più numeri, quindi la
posizione di ogni numero è molto importante.
Le posizioni da destra a sinistra sono chiamate unità, decina, centinaia,
etc. La cifra nella posizione delle centinaia viene moltiplicata con 100, la
cifre del posto decino con 10. Insieme all‘unità, si riceve il numero totale.
Dunque, si può scrivere:
325 = 3 · 100 + 2 · 10 + 5 = 3 · 102 + 2 · 101 + 5 · 100
Questo modo di calcolare è per noi normale.Tutto sommato abbiamo
dieci dita con le quali contare. Oltre al sistema numerico decimale però
ci sono altri tipi di sistemi di numerazione. La dozzina ad esempio, consiste
in dodici parti uguali. Un giorno consiste a due volte 12 ore e un‘ora
è composta da 60 minuti, così un minuto da 60 secondi. Prima che un
minuto nuovo comincia, devono essere passati 60 secondi.
I computer utilizzano il sistema numerico binario che utilizza soltanto due
stati o cifre, 0 e 1. Per evitare confusione il numero 1 viene sostituito a
volte con la lettera L.
Il vantaggio di questo sistema numerico è che i due stati possono essere
rappresentati facilmente con la corrente elettrica che può essere
presente o assente, oppure con un chip di memoria, attivo o passivo.
Altre possibilità non sono ammesse.
Siccome i numeri binari utilizzano soltanto due cifre, questi diventano
velocemente più lunghi dei numeri decimali. Qui sotto vengono riportati
alcuni numeri decimali con il loro corrispondente valore binario:
20
Decimale
Binario
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
0
1
10
11
100
101
110
111
1000
1001
1010
1011
1100
1101
1110
1111
Conoscenze fondamentali
Minos
Ad ogni modo viene utilizzata una potenza a base 2. Per questo
viene chiamato sistema binario.
Per esprimere il numero decimale 6 nella forma binaria, si scrive:
110 = 1 · 22 + 1 · 21 + 0 · 20 = 1 · 4 + 1 · 2 + 0 · 1
Come si può vedere, da destra a sinistra le cifre binarie hanno il valore di
1, 2, 4, 8, 16, etc. Per convertire un numero da decimale a binario, esso
deve essere diviso per 2 e tenendo in considerazione il resto. La divisione
[]
nente in un ordine di successione inverso, otteniamo il numero binario.
Conversione del numero decimale 29 in un numero binario:
29
14
7
3
1
diviso per 2
diviso per 2
diviso per 2
diviso per 2
diviso per 2
14
7
3
1
0
Resto 1
Resto 0
Resto 1
Resto 1
Resto 1
in questo caso sono 11101.
È chiaro che quando vengono convertiti numeri decimali dispari in numeri binari, l´ultima cifra è sempre uguale a 1, perchè dividendo i numeri
dispari per 2 il loro valore residuo equivale sempre a 1.
Esercizio
Risolvete il problema 15 dell‘eserciziario!
Mentre, per trasformare un numero binario in un numero decimale, si
deve determinare il valore di ogni cifra del numero binario. Tutti i valori
con il numero binario 1 vengono addizionati tra loro, mentre gli altri valori
vengono ignorati. Come già menzionato, questi valori sono potenze con
la base 2. La prima cifra sulla destra ha il valore di 20, quindi 1.
La conversione del numero binario 11001 si calcola come segue:
1
1
0
0
1
24 =
23 =
22 =
21 =
20 =
Somma:
Esercizio
16
8
4
2
1
16
8
0
0
1
25
Risolvete il problema 16 dell‘eserciziario!
21
Minos
1.4.1
Conoscenze fondamentali
Numeri binari nel computer
Di solito la persona che utilizza il computer non ha a che fare direttamente
con i numeri binari. Ma quando si vuole scrivere un programma oppure
si vuol programmare una memoria abile/logica o SPS, la situazione è
diversa.
Ad ogni modo è sempre un vantaggio possedere una conoscenza base,
circa il funzionamento del computer.
Un numero binario a una sola cifra è chiamato bit. Un bit ha il valore di
0 oppure di 1. 8 bits formano insieme un byte. Queste otto cifre binarie
[^__{
volte zero, otto volte uno.
All´interno del computer ogni carattere e ogni cifra del sistema decimale
viene rappresentato con un byte. Quale numero binario determina un
]'"]'
for Information Interchange). La A maiuscola per esempio, è equivalente
alla successione di 01000001 o al numero decimale 65.
Siccome i numeri binari possono essere molto lunghi, nell’informatica si
utilizza un altro sistema numerico. Un byte viene diviso in due gruppi da
quattro bit. Questi gruppi da quattro bit vengono chiamati anche „nibbles“.
Un nibble o quattro bits, possono rappresentare 16 valori diversi.
Per esprimere un nibble con un carattere, si usa il sistema esadecimale.
Il sistema esadecimale è a base 16, al contrario del sistema numerico
decimale, il quale la base è costituita dal numero. Siccome nel sistema
esadecimale sono necessari ben 16 caratteri diversi, vengono disposte
accanto alle cifre da 0 a 9 le lettere da A a F. Per evitare confusioni con
altri sistemi numerici, si aggiunge spesso la h minuscola dopo il numero
esadecimale.
I numeri che si possono rappresentare con un byte, possiedono un differente
settore espresso da un differente sistema numerico:
]
]
]
22
[[[[[[[[
[[
[
;;;;;;;;
|}}
^__
Conoscenze fondamentali
Minos
Attraverso l´utilizzo dei numeri binari, nel computer si vanno a formare
determinati numeri che sono il risultato di potenze a base 2. Per esempio:
26
27
28
29
210
=
=
=
=
=
64
128
256
512
1024
Questi numeri si possono trovare specialmente nei chip di memoria(memoria
elettronica). Quindi è per via dei numeri binari quando se scheda ha una
capacità di 512 MByte di memoria e non di 500.
~X
numerici. Nel sistema decimale un chilo equivale al valore di 1000, cosi
come 1000 metri equivalgono a un chilometro. Nell‘elaborazione dati
invece 1024 byte formano un kilobyte.
%$
"\
"\
valore 1000 o 1024.
]
;[[[
mentre il valore bytes è di 1024.
Esempio
La velocità di trasmissione di un canale telefonico ISDN è di 64 kbit/s, cioè
esattamente 64.000bit/s e non 65.536 bit/s, che sarebbe il risultato di 64
x 1024. Un Hard disk moderno di 400 Gigabyte equivale a 400 miliardi
di byte. Ma siccome il computer utilizza il sistema numerico binario, ci
risulterà una capacità di 372,5 Gb. I produttori di hard disk preferiscono
usare il valore 400Gb invece di 372,5.
23
Minos
1.5
Conoscenze fondamentali
Calcoli con variabili
Con le variabili si possono rappresentare (regole valide generali) sotto
forma di formula. Per rappresentare le variabili vengono utilizzate le
lettere dell´alfabeto. Sostituendo una variabile con un valore concreto,
sarà possibile calcolare il risultato per qualsiasi caso singolo.
Ad esempio la formula per il calcolo dell´ area di un rettangolo è la seguente:
A=a·b
]
&
rettangolo.
Viariabili come a e b possono essere gestite allo stesso modo dei numeri.
Si possono eseguire con le stesse regole dei numeri, come ad esempio,
l´esecuzione della moltiplicazione e la divisione prima dell´addizione e la
sottrazione, o anche per eseguire le regole per l‘inclusione e l‘esclusione
delle parentesi. Ovviamente si può calcolare il risultato solo sostituendo
le variabili con dei valori concreti.
Se si deve calcolare un‘equazione, solo un valore dev‘essere sconosciuto
per ottenere un risultato determinato. Nelle equazioni ad esempio per
calcolare l’area di un rettangolo, dobbiamo conoscere la lunghezza di
tutte e due i lati di esso.
Ma può accadere anche che si conosce soltanto l´area e la lunghezza
di un solo lato del rettangolo e quindi l´altro lato dovrà essere calcolato.
In questo caso l’equazione deve essere trasformata così che il valore
sconosciuto rimanga isolato in un lato del simbolo dell´uguale.
La combinazione dei numeri, delle variabili e dei segni di operazione
aritmetica in un lato del segno uguale sono chiamati „termini“.
Il valore sconosciuto di solito viene rappresentato con la lettera x. La
trasformazione di un equazione viene anche chiamata soluzione di x.
La trasformazione avviene svolgendo la stessa operazione aritmetica su
entrambi lati del simbolo dell ´uguale, quindi sui termini. Quest‘operazione
viene scritta a destra dell’equazione e viene separata con una barra
verticale.
Dopo la trasformazione, il valore x che deve essere calcolato, deve rimanere a sinistra del simbolo uguale.
24
Conoscenze fondamentali
Esempio
Esercizio
1.6
Minos
a
a–b
x
=b+x
=x
=a–b
|–b
a
a+x
x
=b–x
=b
=b–a
|+x
|–a
x:a
x
=b
=b·a
|·a
a:x
a
a:b
x
=b
=b·x
=x
=b
|·x
|:b
Risolvete il problema 17 dell’eserciziario!
Calcolo della percentuale
Nella vita quotidiana trattiamo spesso con valori che vengono espressi
'
di persone che appartengono ad una determinata fascia di età nella
popolazione.
Qui il valore di riferimento è 100, e il valore della percentuale è parte di
100, senza il menzionamento del valore assoluto.
Esempio
~[~
^
[
seconda bottiglia contiene di più rispetto alla prima bottiglia.
%;[[&[
a 0,6 litro.
;{;[[[{[
^
[
;[[&
[
[
^{;[[[{[
;[[
Dipende dalla formulazione del problema, uno degli altri tre valori è sconosciuto e può essere calcolato dopo aver eseguito appropriatamente
la conversione dell‘equazione.
Esercizio
Risolvete il problema 18 dell‘eserciziario!
25
Conoscenze fondamentali
Minos
1.6.1
Calcolo degli interessi
Se una persona si fa concedere un prestito, di solito si devono pagare gli
interessi. Gli interessi sono rappresentati in percentuale. Ia percentuale
determina il tasso di interesse di 100 € che una persona deve pagare
in un`anno.
Esempio
A quanto ammonta la percentuale del tasso d´interesse se si devono
pagare 12 000 euro di interessi per un credito di 100 000 euro? 100 000
;[[ percentuale dei 12 000 euro.
;[[{;[[[[[{;^[[[
Dopo la conversione dell‘equazione si può calcolare il valore degli inter
;^
&
;[[
si calcola dividendo il valore degli interessi per la somma del prestito.
x = 12000 euro : 100000 euro = 0,12
#
;[[
;^
%
;[[
percentuale deve essere premuto dopo aver eseguito la divisione, invece
di premere il tasto dell´uguale. Se si esegue il calcolo con una calcolatrice
che non conosciamo, si deve prima controllare il funzionamento di essa,
eseguendo esempi facili.
Facendo il calcolo degli interessi composti, si deve prendere in considerazione che gli interessi devono essere pagati in parecchi anni.
Esempio
26
Se ci sono 1000 euro su un libretto di risparmio e il risparmio rimane in
_
gli interessi di un anno e moltiplicando poi il risultato per gli altri 5 anni,
;;_[
Conoscenze fondamentali
Minos
Ma dopo un´anno si troveranno nel libretto di risparmi 1030 Euro, e gli
interessi nel secondo anno devono essere pagati corrispondentemente a
questa somma. La formula seguente viene utilizzata di solito per questo
tipo di calcolazione, in cui G0 sta per il capitale d‘avviamento e Gn è il
prestito dopo gli anni n . Z sta per il valore di interesse e n per il numero
degli anni.
Gn = G0 (1 + z/100)n
%
$
il seguente risultato:
G5 = 1000 euro · (1 + 3/100)5
G5 = 1000 euro · (1 + 0,03)5
G5 = 1000 euro · 1,035
G5 = 1159,27 euro
La differenza del risultato del calcolo precedente non è molto grande.
Ma con un lasso di tempo maggiore e un tasso d´interesse più alto, la
differenza è naturalmente più grande.
' ^ versata si raddoppi. Se invece non venissero compresi nella calcolazione
i dovuti interessi, allora basterebbero circa 33 anni per ottenere il doppio
della somma.
Se il credito venisse ripagato costantemente con rate di uguale porzione,
la maggior parte della prima rata ci servirà per coprire gli interessi, e soltanto la parte rimanente ridurrà il credito. Soltanto attraverso i pagamenti
si ridurrà la parte degli interessi e grossa parte del credito sarà ripagata.
Esercizio
Risolvete l´esercizio 19 nell’eserciziario!
27
Minos
1.7
Conoscenze fondamentali
Geometria
Prima di introdurre concetti geometrici, occorre menzionare alcune de
Un corpo possiede tre direzioni di misura: lunghezza, larghezza ed altezza. Quindi è tridimensionale. Un piano ha soltanto due dimensioni.
>~
è il bordo del cubo ed ha soltanto una dimensione. Un punto invece non
%&
come punto d‘intersezione di due linie.
Oltre a il punto anche la retta appartiene ai fondamenti geometrici. Una
In un piano due rette possono intersecarsi tra loro al massimo in un punto,
ad eccezione in cui le rette venissero sovrapposte l´un l´altre.In questo
caso tutti i punti coincidono tra loro. Se due rette su di un piano non si
intersecano allora queste vengono chiamate parallele.
&
Un segmento, come una retta, viaggia attraverso due punti (estremi),
ma questi ne determinano la sua lunghezza. Un segmento è quindi la
connessione più breve tra due punti.
1.7.1
Angolo
Nel caso in cui due raggi partono da un punto in comune, essi vanno
a formare un angolo. Se ruotiamo uno di questi raggi intorno al punto,
$
indicherà l’angolo.
Un cerchio è diviso in 360 settori, che si chiamano gradi. Un angolo di
360° è un angolo completo, e si chiama angolo giro.
Un angolo con un valore di 0° e 90° si chiama angolo acuto. Un angolo
ottuso ha un valore di 90° e 180°.
Se tutti e due i raggi sono perpendicolari tra loro, vanno a formare il così
chiamato angolo retto. Il suo valore è di 90°.
Nel caso che i due raggi si trovino in direzione direttamente opposta tra
di loro, essi formano un angolo piatto col valore di 180°. Angoli dal valore
tra 180° e 360° vengono chiamati angoli concavi.
28
Conoscenze fondamentali
angolo
acuto
spitzer
Winkel
angolo
piatto Wink
gestre
ckter
el
angolo
retto
rechter
Wink
el
angolo
concavo
überst
um
pfer Wink
el
Minos
angolo
ottuso
stum pfer
Wink
el
angolo
giro
Voll
w inkel
angolo a
Stufenwink
el
gradini
angolo
alterni
W echselwinkel
angoli
traan
rette
Winkel
sich
intersecate
schneidenden Gerad
angolo
opposto
entgegengeset
zt
lie
gende W inke
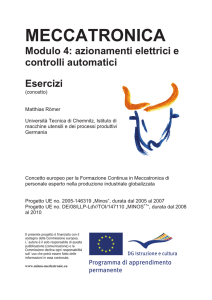
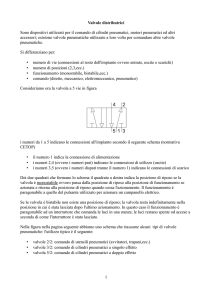
Immagine 3: Angoli a rette lineari
Se due rette vengono intersecate tra loro, vanno a formarsi quattro angoli.
insieme sempre il valore di 180°.
Se una retta attraversa due linee parallele, si formano in totale otto angoli
separati. La gradazione di questi angoli è uguale. Questo vale anche per
gli angoli alterni.
La somma degli angoli in posizione opposta tra di loro è sempre di 180°.
29
Conoscenze fondamentali
Minos
1.7.2
Quadrangolo
Un quadrangolo è determinato da quattro punti. Su una retta si possono
trovare non più di due punti. A seconda della posizione e la lunghezza
dei loro lati, si possono distinguere diversi tipi di quadrangoli.
Un quadrato possiede quattro lati uguali. I lati opposti sono paralleli. Ogni
angolo di un quadrato è di 90°.
L’area del quadrato si calcola con la lunghezza dei suoi lati.
Qui di seguito A rappresenta l’area e a la lunghezza del lato.
A = a2
Il perimetro di un quadrato è la somma della lunghezza dei quattro lati
uguali.
U=4·a
Nel rettangolo, a differeza del quadrato, soltanto i lati opposti sono uguali.
L’area del rettangolo si calcola moltiplicando lunghezza per larghezza.
A=a·b
Il perimetro si calcola sommando le lunghezze dei quattro lati. Siccome
due lati hanno sempre la stessa lunghezza, possiamo calcore il perimetro
in questo modo:
U = 2a + 2b
Esempio
Il pavimento di una stanza deve essere tappezzato. La stanza è lunga
6m e larga 4m. Quanti metri quadrati dovranno essere rivestiti? Quanti
metri di bordo del tappeto ci servono per tutta la stanza ignorando le
A=a·b
A=6m·4m
A = 24 m2
U = 2a + 2b
U=2·6m+2·4m
U = 12 m + 8 m
U = 20 m
Abbiamo bisogno di 24 m2 di rivestimento del pavimento. Il bordo del
tappeto deve avere una lunghezza totale di 20m.
30
Conoscenze fondamentali
quadratoQuadrat
rettangolo
Rechteck
trapezio
Trapez
rombo
Rhomb us
aquilone
D rachenviereck
Minos
romboide
Rhombo id
quadrangolo
konkaves Viereck
concavo
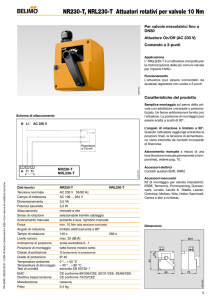
Oltre al quadrato ed al rettangolo, esistono altri tipi di quadrangoli.
I parallelogrammi sono dei quadrangoli e i loro lati opposti sono uguali
e paralleli tra di loro. Per questo anche il quadrato e il rettangolo sono
considerati parallelogrammi. Il rombo, come il quadrato, ha quattro lati
uguali, ma i suoi angoli non sono angoli retti e quindi possiedono un valore
diverso da 90°. Il romboide, come il rettangolo, possiede due lati opposti
di uguale lunghezza, ma anche i suoi angoli non sono di 90°.
Il trapezio dispone di due lati paralleli e tutti i suoi lati possono avere
lunghezze diverse. Invece l’ aquilone possiede due lati adiacenti di uguale lunghezza e nessun lato è parallelo con un altro. La sua forma è la
stessa di un acquilone per bambini.
<
]
è spostato verso all’interno.
La maniera più conveniente per calcolare l´area di questi quadrilateri è
quella di divedere l‘area in triangoli e calcolare separatamente l´area di
ogni triangolo. Il perimetro si calcola sommando le lunghezze dei quattro
lati.
Esercizio
Risolvete il problema 20 dell’eserciziario!
31
Conoscenze fondamentali
Minos
1.7.3
Triangolo
Un triangolo è determinato da tre punti, i quali non possono trovarsi su di
una retta. Questi tre punti vengono chiamati A, B e C, mentre i lati opposti
di questi tre punti vengono indicati con a, b e c. Gli angoli di un triangolo
sono rappresentati dalle lettere greche α (alpha), β (beta) e γ (gamma).
Importante
La somma dei tre angoli interni di un triangolo è 180°.
I triangoli hanno forme differenti. Un acutangolo (triangolo acuto) ha tutti
gli angoli interni minori di 90°. Un ottusangolo (triangolo ottuso) ha un
angolo interno maggiore di 90°. Un rettangolo retto (triangolo rettangolo)
ha un angolo di 90° (angolo retto). Per questi angoli valgono delle formule
Un triangolo con due lati di uguale lunghezza è chiamato isoscele. Nel
caso di un triangolo con tutti e i tre lati di uguale lunghezza, il triangolo è
chiamato triangolo equilatero. In questo caso, anche i suoi angoli interni
sono pari a 60°.
L’altezza h è una linea dritta che parte da uno dei vertici di un angolo e
perpendicolare ai lati opposti. Siccome in un triangolo ci sono tre tipi di
altezze differenti esse sono indicate con ha, hb e hc, , in conformità del
loro lato corrispondente.
angolo
acuto
angolo
retto
32
angolo
ottuso
angolo
isoscele
angolo
equilatero
Conoscenze fondamentali
Minos
L’altezza in un triangolo isoscele, è perpendicolare al lato con una lunghezza differente, divide questo lato in due parti uguali.
L´area di un triangolo equivale alla metà del prodotto dell’altezza e del
lato sul quale sta l’altezza:
Esempio
Qual’è l’area di un triangolo che ha la lunghezza di un lato pari a c = 5
cm e l´altezza hc = 4 cm?.
Siccome l’altezza è sempre perpendicolare ad un lato, essa divide il tri'
di un triangolo rettangolo, per questo è preferibile trasformare il triangolo
in due triangoli retti, se si vuole eseguire la calcolazione dell´area.
Importante
In un triangolo rettangolo, il lato opposto all´angolo retto è chiamato ipotenusa. E gli altri due lati del triangolo sono chiamati cateti.
Per i triangoli retti vale il teorema di Pitagora, ovvero, che in ogni triangolo
rettangolo, l‘area del quadrato costruito sull‘ ipotenusa è pari alla somma
delle aree dei quadrati costruiti sui cateti. La formula viene scritta così:
c2 = a2 + b2
Esempio
I due cateti di un triangolo rettangolo hanno una lunghezza di 3 cm e di
4 cm. Qual è la lunghezza dell’ipotenusa?
c2 = a2 + b2
c2 = 32 cm2 + 42 cm2
c2 = 9 cm2 + 16 cm2
c2 = 25 cm2
c = 5 cm
L’ipotenusa ha una lunghezza di 5 cm.
Esercizio
Risolvete il problema 21 dell’eserciziario!
33
Conoscenze fondamentali
Minos
b2
2
a
a
b
c
c2
Esempio
Un triangolo isoscele ha due lati, lato a e lato b, pari a 13 cm. Il lato c ha
una lunghezza di 10 cm. Qual è l’area del triangolo?
Prima si deve calcolare l’altezza del triangolo, dividendo il triangolo isoscele in due triangoli rettangoli. La lunghezza dell’ipotenusa di ogni angolo
rettangolo è 13 cm e un cateto è uguale alla metà della lunghezza del
lato c, cioè 5 cm. Questa parte del lato viene chiamata d. Ora è possibile
calcolare l´altezza eseguendo il teorema di Pitagora.
a2 = hc2 + d2
hc2 = a2 – d2
hc2 = 132 cm2 – 52 cm2
hc2 = 169 cm2 – 25 cm2
hc2 = 144 cm2
hc = 12 cm
Con l’altezza e la lunghezza del lato è possibile ora calcolare l’area.
34
Conoscenze fondamentali
Funzioni trigonometriche
Per il calcolo del triangolo rettangolo, si possono usare le funzioni trigonometriche seno, coseno e tangente. Se si vogliono calcolare altri tipi di
triangolo utilizzando le funzioni trigonometriche, essi devo essere divisi
in triangoli retti.
Accanto all’ipotenusa entrambi i cateti hanno una denominazione speciale. L`adiacente è il cateto che forma con l’ipotenusa l’angolo al quale
vengono eseguite le calcolazioni. Il lato opposto o cateto è invece il cateto
opposto a quest’angolo.
Il seno di un angolo equivale al lato opposto diviso dall´ipotenusa.
sin α
=
opposto
Glato
egenkat
hete
Hipotenuso
ypotenuse
Per ottenere dal seno di un angolo di nuovo l´angolo, prima venivano
utilizzate tabelle speciali. Oggi questo calcolo è più semplice grazie alle
$
trigonometriche.
Per calcolare il seno di un angolo di 30° digitiamo il valore 30 e premiamo il tasto SIN. Se il calcolo è corretto il risultato è 0,5. Per eseguire
l’operazione inversa si trovano nelle calcolatrici tasti differenti. Nella
maggior parte delle calcolatrici c’è un tasto che attiva più funzioni, indicato come ARC SIN oppure SIN-1. Digidando 0,5 e premendo il tasto
appropriato otterremo il risultato di 30°.
ssae
eunu
en
tt
o
o
ipp
Hy
α
lato
opposto
G egenkathete
1.7.4
Minos
lato
adiacente
Ankathete
!"
35
Conoscenze fondamentali
Minos
Esempio
Un triangolo rettangolo ha un’ipotenusa con una lunghezza di 5 cm. Il lato
'
sin α
=
cateto
Gegenkathete
ipotenusa
Hypothenuse
sin α
=
3 cm
5 cm
sin α = 0,6
α ≈ 36,9°
Un triangolo rettangolo ha un angolo di 50°. Il lato opposto ha una lunghezza di 8 cm. Qual è la lunghezza dell’ipotenusa?
lato opposto
Gegenkathete
Hypothenuse
ipotenusa
8 cm
sin 50° =
c
8 cm
c =
sin 50°
c ≈ 10,44 cm
sin α
=
Un’altra funzione trigonemetrica, la funzione del coseno, può essere
calcolata dall’adiacente e dall’ipotenusa.
lato
adiacente
Ankat
hete
cos α =
Hipotenusa
ypotenuse
La terza importante funzione trigonometrica è la tangente. La tangente
di un´agolo si ottiene dividendo i lati opposti con l´adiacente.
tan α
Esercizio
36
=
lato
oppposto
G egenkat
hete
lato
adiacente
Ankat
hete
Risolvete il problema 22 nell´eserciziario!
Conoscenze fondamentali
1.7.5
Minos
Cerchio
Il cerchio viene determinato dal suo raggio. Il raggio viene misurato dal
punto centrale della circonferenza. Il diametro del cerchio misura esattamente il doppio del raggio.
Il rapporto tra la circonferenza e il diametro di un cerchio equivale al
valore π. Questa lettera viene pronunciata pi. Questo valore è un nu
$
non contengono nessuna regolarità. Le prime cifre del numero π
{
;;_^__ con le cifre 2 o 4.
La formula per il calcolo della circonferenza è:
U
= π ⋅ d = 2⋅π ⋅r
Anche il valore π νεχεσσαριο περ χαλχολαρε λ αρεα δι υν χερχηιο.
La formula è la seguente:
Esempio
Un cerchio ha una circonferenza di 20 cm. Calcolate il diametro e l’area
di questo cerchio.Arrotondate il risultato di 2 cifre dopo la virgola.
= π ⋅d
U
d =
π
20 cm
d =
3,1416
d ≈ 6,37 cm
U
1
⋅ π ⋅ d2
4
1
A =
⋅ 3,1416 ⋅ 6,372 cm 2
4
A =
A
Esercizio
≈ 31,87 cm 2
Risolvete il problema 23 dell’eserciziario!
37
Conoscenze fondamentali
Minos
1.7.6
Corpo
~
contenuto del corpo rappresenta il volume di esso.
Un cubo è formato da sei quadrati della stessa grandezza. Per questo
{
A = 6 · a2
Siccome tutti i lati del cubo hanno la stessa lunghezza, il volume può
essere calcolato con la formula seguente:
V = a3
$
opposta sono rettangoli della stessa grandezza. Perciò la misura equivale
alla somma di tutte e sei le aree.
A = 2 (a · b + a · c + b · c)
Il volume equivale al prodotto della lunghezza dei lati.
V=a·b·c
<
&
l´altezza del cilindro. Per poter calcolare Il volume del cilindro è necessario
conoscere l’area di un cerchio e l´altezza del cilindro.
Esempio
Un cilindro ha un diametro di 5 cm ed un’altezza di 20 cm. Qual’ è l’area
ed il volume del cilindro? Per prima cosa bisogna calcolare l’area e il
perimetro del cerchio.
1
⋅ π ⋅ d2
4
1
A =
⋅ 3,1416 ⋅ 52 cm 2
4
A =
A = 19,635 cm 2
U
U
U
38
= π ⋅d
= 3,1416 ⋅ 5 cm
= 15,708 cm
Conoscenze fondamentali
Minos
Con la circonferenza del cerchio e l’altezza del cilindro è possibile cal
AM = U · h
AM = 15,708 cm · 20 cm
AM = 314,16 cm2
AZyl = 2 · A + AM
AZyl = 2 · 19,635 cm2 + 314,16 cm2
AZyl = 353,43 cm2
Il volume si calcola moltiplicando l’area del cerchio per l’altezza.
VZyl = A · h
VZyl = 19,635 cm2 · 20 cm
VZyl = 392,7 cm3
$$ $>'
temente il cuboide è una specie di prisma.
$ centro viene chiamata raggio. La formula seguente è usata per calcolare
$
A = 4 · π · r2
Il volume della sfera viene calcolato con la formula seguente:
V
Esercizio
=
4
⋅ π ⋅ r3
3
Risolvete il problema 24 dell’eserciziario!
Oltre a questi corpi ne esistono anche numerosi altri tipi, ma ad ogni
modo non sono il soggetto di discussione in questo libro.
39
Minos
40
Conoscenze fondamentali
Conoscenze fondamentali
2
Fisica tecnica
Minos
#
$$
~
X
X
X
#
X]"$
{]
~
\
{
Grandezza
Basisgröße
Länge
massa Masse
Nome dell‘unità
Basiseinheit
Simbolo dell‘unità
Einheitszeichen
SI
metroMeter
m
Kilogramm
kg
intervalloZeit
di tempo
secondo
Sekunde
s
intensità
di corrente
Stromstärke
ampere
Ampere
A
temperatura
Temperatur
assoluta
kelvinKelvin
K
quantità
di sostanza
Stoffmenge
mole
intensità
luminosa
Lichtstärke
candela
Candela
Tabella 1:
Mol
mol
cd
SI-unità
Esempio
X
X
X
X
^
41
Conoscenze fondamentali
Minos
]
X
$
$
>
Vorsatz
VorsSimbolo
atzzeichen
Nano
n
0,000 000 001
Mikro
μ
0,000 001
Milli
m
0,001
Chilo
Kilo
k
1000
Mega
M
1 000 000
Giga
G
1 000 000 000
#
Esempio
Decimale
Faktor
$%
~
_~
;[[[#
_[[
$
Esercizio
^_
¡
]
X
$%
$
}
$
]$
$
X
$
X
X
;~
$
^
Conoscenze fondamentali
Minos
< X $ { $
Z
X
con dei caratteri
}¢
]
X$
X
#
Esempio
}¢
};¢;[
^
};[¢
^
};[
X
]X
$
$;[
$
||
43
Conoscenze fondamentali
Minos
2.2
Forza
}
$X
|
~$
#
&
${
}¢
$|
}¢
};¢;
^
};
Esempio
#
$|
£
;
^
}
;;
^
[;[;
Importante
%$
F1
F2
F3
F1 = F2
F1 F3
&'
44
Conoscenze fondamentali
Minos
$
$
$
$$
%
$
$$
}
$
}
$&
$~
$};nella sua azione
$}^$
comune$}
};
2.2.1
Addizione di forze
]
$
$#
$
$
$
&
$
$¤
¥
]$ $>
$ > %& $ > $
$
F3
F3
F3 = F1 +F2
()
_
Conoscenze fondamentali
Minos
]
'
X
$
~ X '
$
$
X
$
X¦$
$
$
$
F1
F2
F1
F3
F2
F1
F3 = F1 +F2
F2
* )
46
F3
Conoscenze fondamentali
Minos
]$
$$
&
$
>$
$$}$$
$
$
<
$
§
$ $
$
> $ $
$
F3
F1
F3
F1
F1,2
F2
F1,F2,F3
F2
F1,2 = F1 +F2
F3
F1,2,3
F1,2
F1,2,3 = F1 +F2 + F3
)
47
Conoscenze fondamentali
Minos
$
%
$
$#
$¤¥¤
¥
<
$]$
$
$
'
$
$]
$
>
>$
$
$'
$
F1
F2
F1
F2
Fh
Fh
F1,2
F1,h
Immagine 12:
F2,h
$
Conoscenze fondamentali
2.2.2
Minos
Decomposizione di forze
$
$
X$
~$
¨"
\
©"
\]$¨©
%
$
¨©
$
'
$
$
$¨©
$
$$
Esercizio
^^ª
¡
asse Y
Y-Achse
asse Y
Y-Achse
FY
F1
F1
FX
asse
X
X-Achse
asse
X
X-Achse
+ ,
Minos
2.3
Conoscenze fondamentali
Momento di una forza (momento torcente)
~$&
#
X
]$
X
$
$ $
$
X
$
$ % X |"|
\
&
${
$$
}¢
F
M
l
Immagine 14:
_[
Momento torcente
Conoscenze fondamentali
Esempio
Minos
~
[^[[#$
}¢
}
}[[^
}^[[
$^[[
'[[$
X
;[[
$[[
;[[
>$
#
%
Esercizio
^[
¡
F
M
F
)
_;
Minos
2.4
Conoscenze fondamentali
Equilibrio delle forze e dei momenti torcenti
]
$
$
#
&
{
$
};«}^«[
;«^«[
~
$
~
X
$
XX
FA
FG
.#
_^
Conoscenze fondamentali
2.5
Minos
Principio di leva
&
'
&$
&
$
¦$$
$
Esempio
~
^[
_
_[#
FL¢L}G¢G
FL}G¢GL
FL_¢[_[^
FL;^_
;^_
Compito
;
¡
lL
FL
!
lG
FG
/0#0
_
Minos
2.6
Conoscenze fondamentali
Pressione
¬
$
#
$%
{
}
%
$
]
X
"]­~
\
^
$%
X
X%
;%;^
%
;[[ [[[ %
%&
;[[[%;%
;[[[[[[%;[[[%;%;^
F
p
& /
_
Conoscenze fondamentali
Minos
X]X
~
;;[[[[[%;[^
$
%
$
[;[[
X
e
]
%
4
p
[bar]
3
pe = 2bar
pabs =3 bar
2
pam b =ca.1 bar
1
pe =– 0,4 bar
Immagine 19:
pabs =0,6 bar
Pressione assoluta e sovrapressione
__
Conoscenze fondamentali
Minos
X®X
]
$
Esempio
~
^
#$
~
^
^
}
}¢
}¢^
}[^¢^
}[
&$[
Compito
2.6.1
^
¡
Trasmissione di forza
$%
~
$
%
$
>
>
$
$
>
>'
>
>
X
X
_
Conoscenze fondamentali
Minos
$
${
}11}^^
&
#
&
%&
Esempio
_^
_[^]
$;[[#
$
F11}^^
;[[_^}^_[^
F^";[[_^\¢_[^
F^;[[[
'
;[
$;[
>
F1 < F2
A1 < A2
p
* _ª
Minos
2.6.2
Conoscenze fondamentali
Trasmissione di pressione
~
$%
"
\
$
%$
>
'
>
$$
>
$ {
}1¢1^¢^
> £
A1
p1
>
<
F
_
A2
p2
F
Conoscenze fondamentali
Esempio
Minos
_[^
_^]
_
#
1¢1^¢^
_¢_[^^¢_^
^_¢_[^_^
^_[
;[
;[_[
Esercizio
2.6.3
¡
La legge del gas
$$
$
$
&
$
p1 V1 p2 V2
=
T1
T2
~
$
&
]
$
{
1¢²1^¢²^
]
{
11^^
<
{
²11²^^
_
Conoscenze fondamentali
Minos
Esempio
3
;
m3¤
¥^[³¶'
_[¶'#
p1 V1 p2 V2
=
T1
T2
p2 1m 3
1bar 8 m 3
=
(273 + 50)K
(273+ 20)K
p2 =
1bar 8 m 3 (273+ 50)K
(273+ 20)K 1m 3
p2 =
8 m 3 323 K
bar
1m 3 293 K
p2 = 8,82 bar
]
$
ª
]
^[¶'X
#
11^^
^^^^
^^¢^^
^
$$
#
ª
[
Conoscenze fondamentali
2.6.4
Minos
Materie correnti
#
X
£
XX£
$
X£
X$
{
;Z;^Z^
~ £
X X ]
£
]>
X
&
>
]
$$
A1
v1
A2
v2
.#$
61
Minos
2.7
Conoscenze fondamentali
Tensione
'
$
no deformarsi
X
$
$
$
$
{
$
X
^
]
$
¸
¤
¥
#
]
£
${
¸}]
$¹
l area di
sezione¬
$
{
¸}]
¦
$
^
Conoscenze fondamentali
Esempio
Minos
~
[[
&
[[^
>
[^%&
σ}]
}σ¢]
}[[^¢[^
};^[[[
]
$;^[[[
$;^[[[
];[
^#
$
{
}¢
}[[¢;[
^
}[[[
$[[[#
$
^>$
%&
$
[[^
63
Minos
2.8
Conoscenze fondamentali
Frizione
#
$$#
$
$
$}R
$
$$
#
$
&
$}N$$
$X
|
$
$º
$
&¤
¥
$
~$
$
X
$&
${
FRº¢}N
£
$
$
$
<
$
FN
direzione
di movimento
Bew egungsr
ich
tung
FR
Reibfl
äche
+ 64
Conoscenze fondamentali
Minos
~$
]$
$
º[
» $
%&
~$
$$¼
> %
&>$
"\#
$
$
Esempio
$
>
[
$$
[;_
[;#$
$
FRº[¢}N
FRº¢}N
FR[;_¢[
}R[;¢[
FR;^
}R
]$;^
$
Compito
_
¡
_
Minos
2.9
Conoscenze fondamentali
Distanza, velocità e accelerazione
XX
X
2.9.1
Moto uniforme
$$
X
<
] $
~
$ %X
$
{
²X
%
X
X
X
X
&X
$&
X
;
[[[
%
$
66
Conoscenze fondamentali
Esempio
Minos
~
[#X
$
[
[
[^_
X[
^_
'
X^_
Compito
2.9.2
¡
Moto accelerato
# $ X & #
X
&XX
>
<
$
&
{
X
½½
]X
^X
~$
X]
]
;
^
X
67
Conoscenze fondamentali
Minos
Esempio
~
#XX
;[
^X
½½
½¢½
½;[
^¢
½[
;[
X[
;[
X
X
X
&
X
X
X]&X
Esempio
~¤
¥X;[
[_
^^[
#X
½¢½
½[_
^¢^[
½;[
X;[
X
_[
;[
Compito
ª
¡
Conoscenze fondamentali
Minos
#X$
X
X{
{
¢
$${
%
{
¢
]$X$
X
&
$&
{
;^¢¢
]
X
{
;^¢¢^
Esempio
~[;[[;[
'
X
;^¢¢
;^¢;[[¢;[
;^¢^ª
¢;[
;
X
;
Esercizio
¡
Minos
2.9.3
Conoscenze fondamentali
Forze su corpi mobili
$
|
$
|$
|<
{
'&
$
X
$
X#¤¥X
#
&
{
£
$
¤$$¥$}
$$
$£
|{
$$
$¤¥
$¤
¥
#
$
$X$
#
'
${
$
}
o
}¢
{
;;¢;
^
ª[
Conoscenze fondamentali
Minos
%&
X$|
;;
^#
$
%
#
;
^
%
&
;[
^
¬$
FG¢
X
;
;
FG¢
FG;¢;
^
FG;
;;[
Esempio
#
;[[
;
^
FG¢
FG;[[¢;
^
FG;[
]
;[
Esercizio
¡
71
Minos
2.10
Conoscenze fondamentali
Rotazione
#
"\
$
&
#
X
X
"\
]
;'$%
1rad intorno al centro di rotazione quando il segmento dell´arco circolare
r
frammento
dell‘arco
Kreisbogenst
ück s s
punto P
Punkt
P
raggio
r r
Radius
asse
di rotazione
D rehachse
5
ª^
Conoscenze fondamentali
Minos
%
^¢π¢
$%&^¢π
] π ; ^
${
^¢π¢
Esempio
[_#
[_
[^_
[ª_¢^¢π¢
[ª_¢^¢π¢[^_
;;
;;
X
#
[
[¶
X
]'
#
$¡¡{
;¶^¢π[¶¾[[;ª_
;[¶"^¢π)¾_ª¶
Compito
[
¡
73
Conoscenze fondamentali
Minos
2.10.1 Velocità angolare
X
X ] ¥ ¥
Xω$
dell‘angolo di rotazione '$
X
½$$
ω½½
X
X
]
XX
;
Esempio
~Xª_[
#X
ω½½
ωª_[¢[¶[
ω_[[¶;
ω^π¢;^_;
X^π¢;^_;
74
Conoscenze fondamentali
Minos
2.10.2 Accelerazione angolare
%&
X
$XX
&
{
α½ω½
X
^;
^
Esempio
X
#
α½ω½
α
[
α;[
^
%
XX
;[
^
Esercizio
;
¡
ª_
Conoscenze fondamentali
Minos
2.11
Lavoro, energia e potenza
2.11.1 Lavoro
$%&
#
>
>
X$
{
$Z
¿}¢
X
|
ÀÀ|
#
;$;|
;À
À
%
X
|
¿#
X{
;¿Z;[À[[[[[À
;¿¢;[6À[[[[[À
;À^ªª¢;[–7¿
Esempio
~
;[[
^[
[_#$
#
}º¢}N º¢¢[_¢;[[¢;
^
}[_
]X
$[_
¿}¢
¿[_¢^[
¿;[À
~;[À;À
76
Conoscenze fondamentali
Minos
]
$
&
¿}G¢
¿¢¢
Esempio
~
;[[[<
^_#$
¿¢¢
¿;[[[¢;
^¢^_
¿^_^_À
#
$
$
$
%&
{
¿;^¢}¢
Esempio
]
$
[$
[[
_[#
¿;^¢}¢
¿;^¢[[¢[
¿;^[À
%
;^[À
_[
¿_[¢;^[À
¿[[[ÀÀ
77
Conoscenze fondamentali
Minos
%
${
}¢
$X
&
$
{
;^¢^
~
$
&{
¿}¢
¿;^¢¢^
X
X
]
XX
$>
>
Á
£$
~
;[[
X[#
¿;^¢¢^
¿;^¢;[[¢"[\^
¿;^¢;[[[[[¢"^_
\^
¿;^¢;[[[[[¢^_^
^
¿;^_À¿
%
;^_À¿
Esercizio
ª
^
¡
Conoscenze fondamentali
Minos
2.11.2 Energia
%
#
%&X
&
&
calcolata
X
]
À
¿
' $ $ >
%
$
#
$ E¢¢
&
]
Esempio
#
;_[>
#
~
;[[[
E¢¢
E;[[[¢;
^¢;_[
E;ªÀ
E[[¿
;ªÀ[[¿
ª
Conoscenze fondamentali
Minos
]
]
{
E;^¢¢^
'
X'
X
Esempio
~
;_[[X[
# #
X;[
E;^¢¢^
E;^¢;_[[¢^_^ m^
^
Eª_À
<
X{
E;^¢;_[[¢_[^ m^
^
E;ª_À
X[ª_À
;[X;ª_À
<
< #
$
>
Esercizio
[
¡
Conoscenze fondamentali
Minos
2.11.3 Principio della conservazione dell‘energia
$$
}
dice
{
<< + E
$ » $
$
%> $
&
&
$$
$ »
Esempio
~
X[
]
X#
$
E<
¢¢;^¢¢^
¢;^¢^
;^¢^
;^¢^_^m^
^;
^
;
X;
£
;
Conoscenze fondamentali
Minos
2.11.4 Potenza
#
]
X
]&
¤¥
%X
%¿½
X À X
X¿¿]X
¿À
|
|
X
%]
X
]&
$
X{
;%][ª_¿
;¿;%]
]
$
${
%}¢
$X
Esempio
%X[
$
_[[#
%}¢
%_[[¢^_
%;^_¿
'
;^_¿
Esercizio
^
¡
Conoscenze fondamentali
Minos
$ $ $
$$
<
η%%auf
$$
%
;[[
$$&
[;
;[[
X
$#
$
#
$$
$
>
>$
$
&
$
#
$$|
$$$
Esempio
~
[[¿_[¿#$$
η%%auf
η_[¿[[¿
η[
$$[[
Minos
2.12
Conoscenze fondamentali
Termodinamica
2.12.1 Temperatura
X
"'
\¶'
[¶'$
;[[¶' #
$ $$ ;[;^_#
$
X
]
$
X
~[>
~
Â^ª;_'
%&
>
'
<
$$
$
$$
;[[$
^ª;_ª;_#
$
{
«^ª;_
¶'%
&^ª
$
'
X
¶'&
Conoscenze fondamentali
Esempio
Minos
$
­;_¶'#
Â;_¶'«^ª;_
ªª_
$
ªª_
2.12.2 Dilatazione di corpi solidi
$
$
$
{
½α¢[¢½
α $
----------- [ ½$$
$$$
&
X
;
Esempio
~^[
[$$[[[[[;^
X
½α¢[¢½
½[[[[[;^;¢^[¢[
½[[[ªª
ª
_
Conoscenze fondamentali
Minos
2.12.3 Dilatazione dei gas
&
$
]
X
& {
½²γ¢²[¢½
&
$
$$$$
%&
$&
γ;^ª;_;[[[;;
#
[
%&γ
$
$
$
#
Esempio
~
_[3^[
}
$
#$
½²γ¢²[¢½
½²[[[;;¢_[3¢^[
½²;3
^[
;3
'X
&
X#
&
${
½γ¢[¢½
#
$
Conoscenze fondamentali
Minos
2.12.4 Energia termica e capacità termica
]
¤$¥#
$$
#X
À¿
%
{
#¢¢½
X
À"Z\
X'
X
À%&
${
'#½¢
Esempio
#
^[¶'
ª[¶'
X^[¶';[À
#¢¢½
#;À¢;¢_[
#^[À
%
^[À
Esercizio
_
¡
ª
Minos
Conoscenze fondamentali
Conoscenze fondamentali
3
Disegno tecnico
3.1
Fondamenti del disegno tecnico
3.1.1
Il disegno tecnico come mezzo della comunicazione
Minos
Oggi giorno i prodotti non vengono più realizzati dalla singola persona,
ma in larga misura il lavoro viene diviso tra un gruppo di collaboratori.
Infatti, già nella fase di design di un prodotto, il lavoro viene diviso in
sezioni/settori e workshops differenti.
&
$$
tutto il mondo. Molti elementi di costruzione sono componenti standart
oppure possono essere comprati da imprese ausiliarie.
%
$
tra personi ed AZIENDE differenti. Malgrado la modernità dei computers,
le conoscenze di disegno tecnico sono ancora molto importanti per la
comunicazione e lo scambio di informazioni.
Il disegno tecnico offre la possibilità di rappresentare pezzi lavorati
tridimensionali a misura esatta e soltanto in due dimensioni. Tutte le informazioni necessarie per la produzione possono essere contenute nel
disegno tecnico, ad esempio:
- scala e tolleranza
­
- materiali usati
- trattamenti termici
- protezioni anticorrosive
- istruzioni di assemblaggio.
Nella preparazione del disegno tecnico, dovranno essere seguite determinate regole, che serviranno a far capire al tecnico o all´artigiano il lavoro
da svolgere. Queste leggi sono chiamate norme di disegno.
zione dei processi di creazione.
Questi compiti includono:
- la creazione di disegni tecnici,
­$
­
­
­
89
Minos
Conoscenze fondamentali
Nel campo della tecnica le norme sono le regole. Esse permettono lo
scambio e le informazioni dei prodotti. Esistono norme differenti per
differenti campi di utilizzo.
Norma DIN
Le norme DIN sono rilasciate dalla „Deutsche Institut für Normung“
(l’Istituto tedesco per la standardizzazione). I contenuti sono sviluppati
da singoli comitati, che sono i rappresentanti dall´industria, il campo della
X
sioni delle norme specialisti. Rappresentanti dell’industria, della ricerca,
della rappresentanza degli interessi e dell’autorità fanno parte di queste
commissioni. Si possono comprare le norme DIN alla casa editrice Beuth.
Norme ISO
Le norme ISO vengono riconosciute in tutto il mondo. Esse vengono
rilasciate dall´Organizzazione Internazionale per la Standardizzazione
(International Organization for Standardization). L’istituto tedesco per la
standardizzazione è membro dell’ISO.
Le norme ISO sostengono la collaborazione mondiale nel campo della
tecnica. Oltre alle norme tecniche, ci sono anche altre norme, come per
esempio la norma ISO 9000 per la gestione della qualità.
Norme EN
Il Comitato Europeo per la standardizzazione è responsabile per
l´emissione delle norme europee. Le norme DIN e EN sono valide soprattutto nell’Europa occidentale. Queste norme sono emesse in considerazione dello Standart ISO, e vengono usate in tutti i campi della tecnica,
eccetto l´elettrotecnica e la comunicazione.
Sono responsabili per quest´ultimi settori il Comitato Europeo per la
standardizzazione dell´elettrotecnica e l’Istituto Europeo per le norme/
standarts della telecomunicazione.
3.1.2
Tipi di disegni
Le esigenze a secondo del disegno/progetto possono variare. Come
risultato, esistono diversi tipi di disegno. Queste tipi sono descritti nella
parte 1, DIN 199.
Ci sono aspetti differenti per la determinazione del tipo di disegno. I piu
utilizzati sono descritti qui a seguito, ma senza entrare nel dettaglio circa
la spiegazione del concetto.
90
Conoscenze fondamentali
Minos
Tipi di illustrazione
Ci sono due tipi di illustrazione, che sono: lo schizzo e il disegno. Gli
schizzi non vengono realizzati in scala, essi spesso disegnati a mano
libera, utilizzando una matita.
Invece i disegni sono illustrazioni (visive) che consistono in linee.
Tutti i disegni che servono per la rappresentazione o produzione di un
oggetto sono riassunti in un set di disegni.
Tipi di creazione del disegno
Qui abbiamo un disegno originale e una copia. L´originale viene usato da
modello per le altre copie e rappresenta una certa versione del disegno.
I metodi classici per la realizzazione dell´originale, sono la matita o
l´inchiostro di china. Ma oggi, per la realizzazione di un disegno, molto
diffuso è l´utilizzo del computer. Progettazione e cambiamenti del design
possono essere applicati soltanto sull´originale.
Contenuti del disegno
Un disegno descrive una macchina, un sistema o un meccanismo nella
sua forma/funzione completa.
Mentre la „subassembly“ di un disegno mostra le misure reali della posizione delle tre dimensioni e la forma dei pezzi di lavoro che appartengono
ad un determinato gruppo.
I singoli pezzi sono rappresentati in maniera singola o parziale senza
mostrare la loro allocazione concerne agli alri pezzi di lavoro.
Funzione del disegno
Il disegno preliminare viene usato per descrivere un pezzo di lavoro,
produzione include informazioni circa la fabbricazione o l´assemblaggio
del prodotto/pezzo di lavoro.
I disegni di produzione si dividono a loro volta nella lavorazione e
nell´assemblaggio, il quale descrive le procedure di assemblaggio.
non contiene tutte le informazione complete sul prodotto.
91
Conoscenze fondamentali
Minos
3.1.3
Formati della carta
La DIN 476 stabilisce il formato della carta. Il formato „di partenza“ AO
;^
;{Ã^&;;^>
corto. I formati sono stabiliti nella DIN 67771 T6.
Se si dimezza il formato AO in due parti uguali, si ottiene il formato A1.
Dividendo ulteriormente il formato, otteniamo formati ancora più piccoli
come A2, A3, A4, A5, A6. Il formato di una pagina normale per scrivere
o stampare è A4.
I formati delle singole pagine vengono arrotondati per millimetri. Le singole grandezze sono:
A0
A1
A2
A3
A4
A5
A6
A7
841 x 1189 mm
594 x 841 mm
420 x 594 mm
297 x 420 mm
210 x 297 mm
148 x 210 mm
105 x 148 mm
74 x 105 mm.
A0 841x1189 mm
A2
A1
A4
A3
A6
A5
A7
Immagine 25:
92
Formati
Conoscenze fondamentali
Minos
Tutti i formati possono essere usati come formati verticali o orizzontali.
L`utilizzo più diffuso del formato A4 è in posizione verticale.
Oltre ai formati della carta serie A, esistono anche le serie B, C e D.
I formati della serie B si calcolano nel modo geometrico dei formati della
seria A. Il formato BO si ricava dal formato AO e il formato 2AO che ha
la doppia grandezza. Perciò, si ottiene per BO
§[Ã[Ã^[
§[Ã";;;\Ã";;;^\
B0 = 1000 mm x 1414 mm.
La serie C, invece, si forma dal mezzo geometrico dei lati uguali dai
formati uguali della riga A e della riga B.
'[Ã"\[§[\Ã"\[§[\
'[Ã";;[[[\Ã";;;;\
C0 = 917 mm x 1297 mm.
La serie D si ricava invece nel modo geometrico dei valori dai valori del
formato A ed il prossimo formato più piccolodella serie B.
[Ã[ç;
[Ã";;;\Ã"ª[ª;[[[\
D0 = 771 mm x 1091 mm
In generale, i formati B sono più grandi rispetto ai formati A. I formati C
si trovano tra i formati B e A. I formati della serie D sono i più piccoli.
Esempio
B0 = 1000 x 1414 mm
C0 = 917 x 1297 mm
A0 = 841 x 1189 mm
D0 = 771 x 1091 mm
B4 = 250 x 353 mm
C4 = 229 x 324 mm
A4 = 210 x 297 mm
D4 = 192 x 272 mm
In Nordamerica l´unità di misura dei formati della carta si calcolano in
pollici.
93
Conoscenze fondamentali
Minos
!"
I disegni tecnici possiedono un „title block“, il quale viene sempre posizionato in basso e a destra.
La base del campo ha un’ampiezza di 187 mm e un’altezza di 55 mm.
Queste misure ed il volume sono determinati nella DIN 6771, Parte 1.
Dall’anno 2004, questa DIN è stata sostituita dalla DIN EN ISO 2700.
Nella parte sinistra, s’immette cambiamenti. Si può aggiungere il dato
del cambiamento ed il nome del rielaboratore. La parte sopra è libera.
Nella parte centrale si immette il nome della ditta, e lì sopra il dato ed il
nome del rielaboratore del controllo del disegno. Sopra, ci sono appositi
gni. A destra d’accanto, s’iscrive da quante pagine appartenute consiste
il disegno.
(Verwendungsbereich)
(Zul. bw.
A )
(O berfläche)
M aßstab
(G ewicht)
(W erkstoff
,H albzeug)
(R ohteil-N r)
(M odell
-oderG esenk-N r)
Datum
N am e
(Benennung)
Bearb.
G epr.
N orm
Zust
Änderung
Immagine 26:
94
Datum
Testo
N am e
(Fir
ma des Zeichnun
gsers
tell
ers)
(Zeichnun
gsnumm er)
(U rspr.)
(Ers.f.:)
Blatt
(Ers.d.:)
Bl.
Conoscenze fondamentali
Minos
Più sopra, si trascrive il titolo del pezzo rappresentato nel disegno. Il
materiale del pezzo sta nel quadretto al di sopra.
Nella parte destra, più sopra del campo di tipologico, si registra la riga e
accanto di destra si aggiunge il peso del pezzo da lavorare.
]
$$
si può aggiungarlo tramitte altri posti.
I singoli pezzi di un elemento costruttivo o di un prodotto intero ven
gono elencati tra liste dei pezzi. Vengono aggiunti ai disegni di
montaggi o i gruppi sopra il campo da scrivere o rappresentati
separati. Le liste dei prezzi contengono un simile campo da scrivere
che i disegni.
Per le liste di pezzi della forma A, si usano pagine da disegnare del
formato A4 o A3 nel modo verticale. Nella tabella, si registrano i segu
enti valori:
- posizione
- massa
- unità
- titolo
- numero del prodotto
- commento.
Le seguenti liste dei pezzi della forma B esistono solo nel oblungo
formato A4. Si registrano i seguenti valori nella tabella:
- posizione
- massa
- unità
- titolo
- numero del prodotto
- materiale
- peso misurato in kg
- commento.
95
Conoscenze fondamentali
Minos
3.1.5
Scale
Di solito non è possibile rappresentare a grandezza originale un pezzo
di lavoro, ad esempio non possiamo disegnare un´intero palazzo su di
un foglio. Mentre le parti di un`orologio possono essere molto piccole da
vedere in misura originale. Perciò, non ha molta importanza rappresentare
o meno i pezzi a grandezza naturale.
Per rappresentare pezzi grandi in un disegno, la loro misure viene ridotta,
al contrario invece avviene nei pezzi piccoli. C´è un determinato modo
per ingrandire e ridurre una misura. Per esempio possiamo utilizzare la
stessa forma e riprodurla in scale di grandezza differenti.
La graduazione della scala viene stabilita dalla DIN ISO 5455 e ha sempre
un valore multiplo decimale dei valori 1, 2 e 5.
Disegni realizzati a grandezza naturale sono eseguiti in scala 1:1. Il che
dell´originale.
Una diminuzione dei pezzi grandi può essere fatta con la misura di 1:2.
Ogni millimetro nel disegno corrisponde a due millimetri dell’originale.
Perciò il disegno ha la meta di grandezza rispetto al pezzo originale.
Oggetti larghi possono essere disegnati ad esempio in scala 2:1. Ogni
millimetro del disegno equivale a 2 millimetri dell´originale. Di conseguenza il disegno è due volte più piccolo dell’originale.
Si possono usare per esempio le seguenti misure:
Esercizio
96
Grandezza originale:
1:1
Diminuzione:
1:2
1:20
1:200
1:5
1:50
1:500
1:10
1:100
1:1000
Ingrandimento:
2:1
20:1
200:1
5:1
50:1
500:1
10:1
100:1
1000:1
Risolvete il problema 46 dell’eserciziario!
Conoscenze fondamentali
3.2
Descrizioni in disegni
3.2.1
Vedute
Minos
$
visto da un solo lato. In questo modo è impossibile rappresentare tutte
le informazioni necessarie. Un pezzo di lavoro deve essere disegnato
da diverse angolature.
La rappresentazione delle diverse vedute viene eseguita ribaltando sensatamente il pezzo da lavorare sul foglio. Dipendendo come il pezzo è
postato, si disegna la veduta dall’alto.
$ $ rappresentati girando il pezzo sulla sinistra e sulla destra. La visione
dall´alto viene rapppresenta in basso nel foglio.
All’inizio, si disegna la veduta di fronte. Entrambe le due vedute laterale
vengono create ribaltare il pezzo a destra o a sinistra. Sotto di questo
disegno, la veduta dall’alto viene rappresentata.
Se queste vedute non sono abbastanza, si può rappresentare a destra
la lato posteriore dell´oggetto e sopra la veduta interrata/. Ad ogni veduta
aggiuntiva si devono aggiungere informazioni ulteriori che non erano
introdotte nelle altre vedute.
Ogni deviazione nel disegno deve essere dichiarata.
Immagine 27:
Vedute
97
Minos
3.2.2
Conoscenze fondamentali
Tipi e spessori di linea
Nel disegno tecnico vengono utilizzate linee di differente tipo e spessore.
Questo rende la visione del disegno più chiara e comprensibile.
Un singolo disegno non devo contenere più di due spessori di linea,
dipende dal formato del disegno. Un terzo può essere utilizzato per
etichettare il disegno.
Il gruppo di linee 1 viene utilizzato per disegni nel formato A1. Linee
;[
[_
I caratteri invece hanno un’ampiezza di 0,7 mm.
Il gruppo di linee 0,5, viene utilizzato per disegnare sul formato A4. Qui
le inee piu spesse equivalgono a 0,5, mentre quelle sottili a 0,25 mm. I
caratteri invece hanno uno spessore di linea di 0,35mm.
Una linea spessa e continua viene utilizzata per tracciare i bordi visibili..
~$X
Mentre le linee sottili continue, vengono utilizzate per disegnare/tracciare
le linee di dimensione e linee ausiliari.............................
Le linee irregolari sono anche sottili, esse vengono utilizzate
Con le linee a tratto e punto, si disegnano canti che sono rivestiti e quindi
invisibili. Anche queste linee sono sottili.
Le linee centrali vengono anche disegnate tra una linea a tratto e punto
come pure i cerchi graduati da dentature o cerchi perforati. Le linee sono
strette.
Una grossa linea a tratto e punto, invece, contrassegna un richiesto
trattamento termico per esempio.
Inoltre, anche le strette linee a tratto e due punti sono possibili. Rappresentano per esempio quale posizione limita i pezzi mobili possono attestarsi.
98
Conoscenze fondamentali
3.2.3
Minos
Sezioni
Non tutte le dimensioni di un oggetto sono visibili dall´esterno. Per poter
disegnare i contorni/bordi/spigoli all´interno, sarà necessario sezionare
continua?.
Siccome gli spigoli della sezione visibile sono i bordi del corpo, essi vengono rappresentati con una linea spessa continua.
Il tratteggio/incisione viene sempre eseguito con un angolo di 45°. Se piu
sezioni entrano in collisione tra loro, allora le linee di tratteggio dovranno
o essere rappresentate con un ´apertura angolare opposta, oppure utilizzando una distanza differente tra le linee di tratteggio.
oggetto, devono essere tratteggiate in maniera identica.
Se non si distingue chiaramente dove è stato sezionato /tagliato il pezzo
da lavoro, allora le linee di taglio dovranno essere mostrate . Per questo
processo di taglio si utilizza il Tratto-Punto-Linea.
Le frecce sono disegnate nella linea di sezione al di fuori del pezzo di
lavoro(oggetto). Queste indicano da quale direzione viene vista la su
¦$
maiuscola. Se l’intersezione non è continua, l´interruzione deve essere
disegnata.
Immagine 28:
Tratteggio
99
Minos
Conoscenze fondamentali
La direzione del punto di osservazione/vista viene mostrata sopra la
­§
dente disegno di sezione mostra l’oggetto di lavoro tagliato alla linea di
sezione, che viene rappresentata dalle lettere A e B.
Ma non tutti pezzi di lavoro/oggetti riportano i disegni di sezione. Alcuni
di questi per esempio sono:
- vite, dadi e piastrine,
- chiodi e bulluni,
- alberi,
- sfere e rulli dei cuscinetti,
- chiavette ad incastro e perni,
- denti degli ingranaggi,
- alette o costole.
È anche possibile disegnare solo una sezione di una parte del pezzo da
lavorare. I margini della sezione sono delimitati da una linea mediana
oppure con una linea irregolare.
Sezione A-B
Immagine 29:
100
Sezioni
Conoscenze fondamentali
3.3
Minos
Indicazione di misure in disegni
Un disegno deve rappresentare un pezzo di lavoro e provvedere circa
le informazioni sulle sue misure. Le regole di dimensione sono stabilite
nella DIN 406.
Le misure generali indicano la lunghezza, la larghezza e l’altezza
dell´oggeto. Le misure di produzione, invece, sono le misure che servono
per la produzione.
Le misure per la funzione e per le dimensioni di collegamento sono necessarie per l´interazione di più pezzi di lavoro. Le dimensioni che devono
3.3.1
Linee di misura, linee ausiliare di misure e i valori delle dimensioni
Le linee di misura vengono utilizzate per immettere le dimensioni nel disegno. Queste linee sono sottili e continue. Linee medie e linee di contorno
di un oggetto non possono essere utilizzate come linee di misura. Le linee
di misura vengono tracciate ad una distanza di 10 mm dall´oggetto. Altre
linee di misura possono disegnate con una distanza di 7 mm.
Le linee di misura terminano con la freccie di misura. Queste sono sottili e
continue. La dimensione della lunghezza di una freccia equivale a cinque
volte la larghezza della linea. Ad ogni modo è possibile usare anche la
&
Nel caso non fosse possibile ottenere queste misure ci serviamo delle
linee di misura ausiliari. Queste linee servono per spostare la linea di
misura in maniera parallela. Le linee ausiliarie devono sporgere appena
di 2 mm fuori dalle linee di misura, ma non possono disegnate da una
veduta all´altra.
Lo standart circa l´immissione delle misure è stabilito nel DIN 6776. I
valori delle grandezze sono scritti nelle linee di misura. Tutte le misure
sono descritte principalmente in mm. Perciò non occorre menzionare nel
disegno il tipo di unità di misura.
I valri di grandezza devono essere scritti alla destra o al di sotto delle
più corrispondenti alla scala di misura, devono essere sottolineate. Le
misure prova/campione vengono accerchiate da un ovale.
Disegni prodotti attraverso l´utilizzo di CAD le linee di misura potrebbero
essere interrotte dai valori di grandezza. Quindi le frecce di misura potrebbero consistere di sole due linee. Inoltre, le linee ausiliarie di misura
non devono sporgere dalle linee di misura.
101
Minos
3.3.2
Conoscenze fondamentali
Particolarità di dimensionamento
Contorni lineari possono essere facilmente misurati/dimensionati attraverso le linee di misura e le linee ausiliari di misura. Per cerchi e sfere
però sono occorrono altre regole di dimensione/misura.
Per indicare/differenziare il raggio, . La freccetta della misura addita
$
cerchio.
. Se la rappresentazione della forma circolare non è riconoscibile, si deve
premettere il segno del diametro Ø della misura.
Se il centro del cerchio dell’arrotondamento è troppo lontano per poter
disegnarlo, si deve diminuire la linea di misura che succede tra la corta
ripiena rettangolare.
Se ci sono i diametri piccoli, lo spazio tra il centro del cerchio e il diame
$
$
loro. In quel caso, si deve disegnare la freccetta con la misura esterna
al diametro.
I diametri dei canti non sono spesso riconoscibili nei disegni. Perciò sono
disegnati senza centro. Solo la freccetta di misura con la quota per il
diametro del canto addita al canto che dev’essere indicato.
Nel caso di sfere, il segno del diametro Ø viene premesso la misura. Se
il centro non è anche indicato, si usa per contro la lettera R.
Immagine 30:
102
Misure agli arrotondamenti
Conoscenze fondamentali
Minos
]$
una croce diagonale.
#
$
dev’essere riconoscibile, ma non è evidente nel disegno. Per la croce
diagonale si usa una sottile linea ripiena.
] $ pezzo arrotondo per immettere una chiave per dadi a questo posto, si può
indicare l’apertura della chiave. Quella viene indicata con le lettere SW.
$
versale di sezione circolare.
~
ugualmente questa rastremazione ad una sezione prismatica. Si può
trattare di un corpo con una forma prismatica per esempio.
~
zione si cambia solo unilaterale.
Il dimensionamento può succedere con l’indicazione del angolo o del
rapporto d’inclinazione. Conformemente alla DIN 254, si devono usare
i seguenti coni:
coni solubili facilemente:
1:3
1:5
9° 27´ 44´´
5° 42´ 38´´
cono a bloccaggio automatico:
1:10
1:20
1:30
1:50
2° 51´ 45´´
1° 25´ 56´´
0° 57´ 17´´
0° 34´ 23´´
Con la titolazione del rapporto d’inclinazione, un triangolo premette i
numeri. Questo triangolo deve additare l’inclinazione.
103
Minos
!"
Conoscenze fondamentali
Durante la lavorazione di un pezzo di lavoro vanno a formarsi sulla
X dipende dalla quantità e la profondità di queste irregolarità. La qualità
~ loro profondità e larghezza rendono migliore o peggiore la qualità della
$XX
X
rappresentata da Rt. Essa rappresenta la distanza tra il punto più alto e
>
X
X
Questa rappresentazione di rugosità si riferisce solo ad una singola pro$X
X
differenti valori di rugosità vengono combinati insieme in un unico valore
comune. Nella DIN 4768 sono contenuti due indicatori di misura della
rugosità.
Il valore Ra indica il valore medio aritmetico di tutte le ruvidità lungo un
pezzo misurato. Tutti i valori di irregolarità vengono addizionati insieme
e divisi per il loro numero. Ad ogni modo solchi molto profondi, ma non
$
il risultato della misurazione.
Il valore modio di rugosità Rz, viene diviso in cinque parti parziali uguali.
Le profondità di rugosità di ogni singolo frammento misurato vengono
addizionate e divise per il numero di misura.
Il valore di rugosità Ra può essere introdotto anche nella forma di rugosità
]
X
Qui a seguito vengono riportati alcuni valori di rugosità con il loro corrispondente grado:
Valore medio di rugosità Ra (in μm)
50
25
12,5
6,3
3,2
1,6
0,8
0,4
0,2
0,1
0,05
0,025
104
Grado di rugosità nr.
N12
N11
N10
N9
N8
N7
N6
N5
N4
N3
N2
N1
Conoscenze fondamentali
Minos
A seconda dei metodi di lavorazione si ottengono risulatati diversi di
X
#
valore di rugosità Ra . I valori nelle parentesi vengono raggiunti soltanto
da una elavata ed accurata lavorazione.
Prototipo:
Colata in sabbia
Pressofusione
'
12,5 - 50
3,2 - 50
"[\;­^"\
Formazione:
Fucinatura a stampo
Imbutitura
Estrusione
(0,8) 3,2 - 12,5 (25)
(0,2) 1,6 - 3,2 (6,3)
(0,8) 3,2 - 12,5 (25)
Aie:
Tornitura longitudinale
Sfacciatura
Limatura
Alesaggio
Lisciatura
(0,2) 0,8 - 12,5 (50)
(0,4) 0,8 - 12,5 (50)
(0,4) 1,6 - 12,5 (25)
(1,6) 6,3 - 12,5 (25)
(0,1) 0,4 - 3,2 (12,5)
105
Minos
!"
Conoscenze fondamentali
#
La DIN ISO 1302 stabilisce i simboli da utilizzare circa le proprietà della
#
X
Il simbolo principale, il quale non sarebbe „ragionevole“ utilizzarlo senza
il suo corrispondente simbolo complementare, è rappresentato da un
simbolo a forma di uncino. Se il lato superiore dell´uncino fosse chiuso
¤¥
necessarie la fresatura, alesatura, fucinatura o altri tipi di trattamento.
$
cilindratura, la fucinatura o tramite la fusione.
stati a diverse posti del simbolo principale.
c
d
e
f
²
Xº
X
segmento di riferimento
direzione di scanalatura
sovrametallo
altre misure di rugosità
X
indicata, ma non è sempre possibile. In quei casi, una stretta linea ripiena
X
pezzo da lavorare, fornita con una freccetta.
a
b
c (f)
e d
G eschli
ff
en
R z 0,8
+
%#$
106
Conoscenze fondamentali
Minos
Ma è anche possibile aggiungere solo il simbolo principale senza speci
#
contrappone il simbolo completo direttamente sopra il campo da scrivere
nel disegno.
3.5
Tolleranze di forma e posizione
X
$
X
provoca più o meno variazioni tra la forma teorica e la posizione di un
elemento di costruzione di un pezzo di lavoro.
$
$
costellazione comune di diversi oggetti. Esse determinano quanto piana
foratura si trova nella posizione esatta.
Ad ogni modo le tolleranze di forma e di posizione vengono utilizzate nel
disegno soltanto se fondamentali per la produzione o la lavorazione di un
pezzo. Inoltre le tollerenze sono importanti anche per l intercambiabilità
di un pezzo.
Rettilineità
G eradheit
0.02 A
Perpendicolarità
R echtw inkli
chkeit
0.02 A
Ebenheit
Planarità
0.02 A
Inclinazione
N eigung
0.02 A
Rundheit
Circolarità
0.02 A
Localizzazione
Position
0.02 A
Cilindricità
Zylin
derfor
m
0.02 A
Concentricità
Konzentri
tät
0.02 A
$
Profil einer Linie 0.02 A
Simmetria
Symm etrie
0.02 A
Forma di una
Profil einer
Fläche
0.02 A
Oscillazione
Lauf
0.02 A
0.02 A
Oscillazione
G esam tlauf totale
0.02 A
Parallelismo
Paralleli
tät
Immagine 32:
Simboli per proprietà tollerate
107
Minos
Conoscenze fondamentali
Le tolleranze di forme determinano la deviazione/abberrazione consentita
$
XX
XX$$
Le tolleranze sono indicate con un frame. Il simbolo delle tolleranze di
forma è posizionato a sinistra. A destra troviamo il valore di abberrazione/deviazione concesso. Una freccia indica a che cosa si riferisce la
tolleranza.
X
reale di un pezzo da lavoro da due cerchi concentrici. La distanza tra
questi due cerchi rappresenta la tolleranza.
X
X
squadro
di tolleranza
Toleranzrahmen
valore
tollerabile
Toleranz
w ert
simbolo
Sym bol
0.25
rapporto
Bezug
tollerata
Toler
ierte
Fläche
sezione
circolare
tollerata
Toler
ier
ter Kreisq
uerschnitt
Immagine 33:
108
Tolleranza di rotazione concentrica e di rotazione in piano
0.16
Conoscenze fondamentali
Minos
Le tolleranze di direzione includono le tolleranze di parallelismo, rettangolarità e inclinazione. Il carattere al lato destro del „frame“ di tolleranza
$
La tolleranza di parallelismo determina la posizione di una linea riguardo
$%&$
&
La tolleranza di direzione determina la tolleranza massima di abberrazione/deviazione dell asse di un foro da trapano dalla linea ideale. Nel „title
block“ due linee parallele simboleggiano la tolleranza di parallelismo. Il
¤¥
$
è indicata con una lettera.
La tolleranza di rettangolarità determina in quale „settore“ settore la su
dalla rettangolarità. Il simbolo rispettivo è rappresentato da due segmenti
rettangolari.
La tolleranza di inclinazione è simile a quella di rettangolarità, ma è data/
per un certo tipo di angolo. Il simbolo relativo consiste in due segmenti
che formano un angolo acuto.
0.2 C
C
A
Immagine 34:
0.4 A
Tolleranze di parallelismo e di rettangolarità
109
Conoscenze fondamentali
Minos
Le tolleranze di posizione includono la posizione di tolleranza di poun
punto. Per esempio il punto centrale di un foro da trapano deve essere
collocato all´interno del cerchio, con il diametro corrispondente al valore
di tolleranza. Il punto centrale della tolleranza di un cerchio è situato
esattamente alla posizione ideale, determinata dal disegno.
Le tolleranze di posizione includono inoltre le tolleranze concentricità e
di coassilità. Si riferiscono all’asse di un albero che dev’essere postato
in un campo determinato.
Anche la tolleranza di simmetria è una tolleranza di posizione/localizza<
Le tolleranze di movimenti vengono usate per i pezzi di lavoro rotanti. Dalla
rotazione di un albero attorno all’asse di riferimento A-B, lo scostamento
della rotazione concentrica non deve sormontare il valore dichiarato. La
Le tolleranze totale di movimenti si differenziano dalle tolleranze di movimenti apportando una traslazione assiale o radiale del pezzo addizionale
al movimento rotante.
0.3
8.0
12.0
0.06 A-B
A
Immagine 35:
110
0.06 C
B
Tolleranze di luogo e di movimento
C
Conoscenze fondamentali
3.5.1
Minos
Tolleranze dimensionali
La produzione di pezzi da lavorare non può essere eseguita con dimensioni esatte per ragioni tecniche ed economiche. Determinate valori di
deviazione sono concessi a seconda delle esigenze di produzione. Questi
valori sono chiamato tolleranze dimensionali.
Una possibilità semplice consiste nell´indicazione dei valori generali di
tolleranza stabiliti nella DIN 7161. In questo caso i valori di deviazione
sono validi per tutto il disegno.
Il „set“ di dimensione nel disegno è chiamato dimensione nominale N
con la deviazione nominale A. La tabella contiene valori dei limiti dimensionali più grandi e più piccoli, per differenti dimensioni nominali e classi
di tolleranza.
Esempio
Nel quadro indicatorio del disegno per un pezzo da lavorare, si trovano
le tolleranze generali concesse/permesse. Un pezzo da lavorare ha una
dimensione di 150 mm. Il set di dimensioni S perciò è 150 mm ± 5 mm
= 149,5 ... 150,5 mm.
I valori vengono calcolati nel modo seguente:
Dimensione nominale+ misura limite superiore = quota massima
150 mm + 0,5 mm = 150,5 mm
Dimensione nominale + misura limite inferiore = quota minima
150 mm + (–0,5 mm) = 149,5 mm
Quota massima – quota minima = tolleranza di misura
150,5 mm – 149,5 mm = 1,0 mm
über
Campo di dimensione 0,5 più
di 3
nominale,
3 bi
s6
Nennma ßbereich 0,5
bi
s a 3 misurato in mm
6
Toleranzkl
asse
Livello di tolleranza
in mm
%&
3
über
più di 6
6
bi
s
30
über
più
di 30
30 bi
s
120
120
über
über
più
di 400
più
di
400
bi
s
120
bi
s
120
1000
400
1000
a 400
f(f
ein)
0,05
0,05
0,1
0,15
0,2
0,3
%&
m (mitt
el)
0,1
0,1
0,2
0,3
0,5
0,8
%'&
g (grob)
0,15
0,2
0,5
0,8
1,2
2
%'&
sg (sehrgrob)
–
0,5
1
1,5
2
3
Immagine 36:
Misure limiti per misure di lunghezza senza indicazione di tolleranza
111
Conoscenze fondamentali
Minos
Quando non tutte le dimensioni in un disegno hanno un valore di tolleranza, questi valori sono scritti alla destra della dimensione nominale.
Mentre il limite di dimensione maggiore vie scritto in alto e la dimensione
minore in basso.
+0,3
78 –0,2
misura
limite
superiore
oberes
Grenzma
ß
unteres
Grenzma
ß
misura
limite
inferiore
Ndimensione
ennmaß nominale
Questo metodo permette di fare molte indicazioni differenti di tolleranza.
Perciò il numero possibile dei valori di tolleranza è ristretto. Questo è stato
fatto in accordo con il sistema di tolleranza ISO corrispondente con la
DIN 7151. Qui 20 classi di tolleranza e 13 classi di dimensioni nominali
vengono determinate a seconda della dimensione nominale.
Nella tabella seguente vengono elencate le più importanti tolleranze
principali/di base ISO. Il valore viene espresso in μm.
Esempio
Un albero ha il diametro di 60 mm. La tolleranza deve essere determinata
secondo la IT6. Il valore 19 può essere ottenuto dalla tabella/dalla tabella
possiamo ottenere il numero 19.
Quindi la tolleranza ha un valore di 19 μm = 0,019 mm.
Livelloanzklasse
di tolleranza
ISO-Toler
N ennm aßbereichnimm
Riga dianzre
tolleranza
ISO-Toler
ihe
Immagine 37:
112
da
10 10
über
;
bis 18
da
18 18
über
[
bis 30
da
30 30
über
_[
bis 50
da
50 50
über
[
bis 80
da
80 80
über
;^[
bis 120
da
120120
über
;[
bis 180
10
11
2
3
4
5
6
7
8
9
IT2
IT3
IT4
IT5
IT6
IT7
IT8
IT9
2
3
5
8
11
18
27
43
70
110
2,5
4
6
9
13
21
33
52
84
130
2,5
4
7
11
16
25
39
62
100
160
3
5
8
13
19
30
46
74
120
190
4
6
10
15
22
35
54
87
140
220
5
8
12
18
25
40
63
100
160
250
Tolleranze principali ISO (parte)
IT10 IT11
Conoscenze fondamentali
Minos
#
entrambe le direzioni abbiano una grandezza diversa.
La posizione dei campi di tolleranza è determinata anche in classi. Le
classi sono indicate da una lettera. La lettere maiuscole vengono usate
per tolleranze di misure interne come per i buchi del trapano ad esempio,
mentre le minuscole indicano le dimensioni esterne, like a dimension of
spindle.
Per la posizione dei campi di tolleranze delle misure interne valgono:
Posizione del campo di tolleranze:
¬ Å
Æ
Ç
ÀÀ] ÉÅ
Ê' É
Quanto segue è valido per la posizione del campo di tolleranze delle
misure esterne:
Posizione del campo di tolleranze:
É
Ë
ÌÌ
ÅÉ
Å
misura interna
Innenmaß (Bohrung)
(alessaggio)
misura
esterna
Außenma
ß (
W ell
e)
(albero)
N ennma ß
A
Immagine 38:
H
T
a
h
t
Posizione dei campi di tolleranze
113
Conoscenze fondamentali
Minos
La piena appresentazione delle tolleranze consiste nella dimensione
nominale, la tolleranza di base e la posizione del campo di tolleranza.
Per evitare qualche confusione, le dimensioni interne di tolleranza sono
rappresentate con la lettera esponenziale maiuscola, mentre le dimensioni
di tolleranza esterne con la lettera esponenziale minuscola.
I valori delle tolleranze rappresentate e la appartenente serie di dimensioni
possono essere presi dalla tabella di riferimento.
Esempio
Le seguenti indicazioni delle tolleranze valgono per esempio per un
alesaggio e un albero di un diametro di ogni 45 mm:
45H7
45h6
Entrambi i valori di 45 mm sono la dimensione nominale. L’esponente H
e la piccola h a basso determinano la posizione del campo di tolleranze.
Dalla tolleranza principale, l’alesaggio ha la cifra 7 e l’alberi la cifra 6.
Facendo un alesaggio di 45 mm, la posizione del campo di tolleranze
[«^_
dimensione nominale. In corrispondenza a questi valori, l’alesaggio quindi
&_[[[_[^_
Dall’albero con un diametro di 45 mm, il valore reale si può scostare dalla
[Â;%
diametro tra 44,984 a 45,000 mm.
3.5.2
Accoppiamenti
I valori di tolleranza sono validi prima di tutto per un singolo pezzo da
lavoro. Se vengono collegati insieme più pezzi, bisognerà prendere in
considerazione la conformità di una singola tolleranza. Quindi due valori
di tolleranza formano un’ accoppiamento.
Nell’esempio dell’albero, è ovvio che esso sia quasi sempre più piccolo
rispetto al foro di un trapano a tutti valori di tolleranza possibile, soltanto
in un caso l’ albero e il foro hanno lo stesso diametro.
X $X > dipende dalla combinazione di tolleranze singole. Gli accoppiamenti
sono divisi in: accoppiamento con gioco (o mobile), accoppiamento con
interferenza (o stabile) e accoppiamento incerto.
Nell’ accoppiamento con gioco, il foro è sempre più largo rispetto all’
albero. Nell’ accoppiamento incerto, l’albero può essere più grande o
>
$
#
albero ha una dimensione effettiva maggiore di quella del foro, si parla
di accoppiamento di interferenza o forzato.
114
Conoscenze fondamentali
foro
>ung
albero
Bohr
> Welle
Spielpassung
accoppiamento
con gioco
Immagine 39:
foro
=ung
albero
Bohr
Welle
Ü bergangspassung
accoppiamento
incerto
Minos
foro
<ung
albero
Bohr
< Welle
Preßpassung
accoppiamento
di interferenza
Accoppiamenti
Siccome da un numero elevato di tolleranze si ottengono molte com $ vengono utilizzati un numero limitato di accoppiamenti. Questi possono
essere consultati anche nella tabella di riferimento.
Esempio
Accoppiamenti con giochi sono:
D10/h9
F8/h6
H7/h6
gioco molto largo, utilizzato nella macchine agricole
gioco percettibile, corsoi in conduzioni
le parti possono scivolare solo quando spostati a mano
Un accoppiamento di transizione è:
H7/n6
le parti possono scivolare attraverso l’ applicazione di una
piccola forza, utilizzando uno „spinotto“
Un accoppiamento forzato è:
H7/r6
H8/u8
Serve un impiego di forza maggiore per il collegamento di
pezzi, uso da bronzine
L’ accoppiamento è possibile soltanto con distensione o
contrazione
115
Minos
Conoscenze fondamentali
3.6
Disegni tecnici e computer
3.6.1
CAD
CAD è l’abbreviazione di Computer Aided Design, cioè Progettazione Assistita da Elaboratore. A causa dello sviluppo della tecnica dei Computers,
oggi giorno si utilizzano sempre più raramente le tecniche classiche del
disegno tecnico, ovvero attraverso l’ utilizzo di strumenti come la matita
e l’ inchiostro.
La „CAD-Workstation“ consiste in un PC con un Monitor. Sono preferibili
schermi larghi, perchè rendono possibile la visuale di una larga parte del
disegno.
Oltre ad apparecchi solidi/dispositivi come la tastiera e il mouse, esistono
¤¬blet“, che offre la possibilità di disegnare con il mouse oppure utilizzando
una penna speciale.
I dati vengono immagazzinati nell’ Hard Disk (disco rigido). Molti computer sono connessi ad un Network (rete), questo consente la possibilità di
effettuare un Backup al server conrispondente.
I disegni possono essere stampati attraverso stampanti di grande formato
oppure attraverso Plotter. I cambiamenti non possono essere eseguiti
su disegno stampato ed devono essere apportati usando il computer.
L’uso del programma CAD rende l’ esecuzione del disegno molto più
facile. Punti, linee e curve possono essere disegnate con pochi „clic“ del
mouse. Anche per i „Bending“ possono essere generati velocemente.
Disegni completi oppure parti di un disegno possono essere rimpicciolite o
ingrandite in scala, spostate o raddoppiate, rotate o cancellate in maniera
molto semplice. Se si commette un errore si può tornare indietro senza
problemi. Ciò permette anche la possibilità di provare soluzioni diverse.
X
in maniera considerevole . La tratteggiatura può essere eseguita anche
in modo automatico. L’ applicazione dei valori di misura e il dimensionamento dell’ oggetto viene eseguito dal programma. Si possono inserire
nel disegno pezzi st5andart di una certa compagnia.
Ad ogni modo, la semplice creazione di disegni, non è l’ unico vataggio
del moderno CAD. Infatti è anche possibile eseguire una costruzione a tre
dimensioni. Dal disegno tridimensionale a sua volta è possibile ottenere
un disegno a due dimensioni. Modelli 3D rendono capace l’ esecuzione
di parecchie calcolazioni.
116
Conoscenze fondamentali
Minos
Per esempio, è possibile calcolare la massa di un pezzo di lavoro. Il comportamento sotto carico/pressione viene calcolato utilizzando il metodo
vengono sperimentati al computer.
La possibilità di osservazione da diversi punti è anche molto utile. Questo
£$$
tra componenti differenti può essere osservata attraverso modelli mobili
nel computer.
I programmi 2D CAD lavorano orientati verso il vettore. Con questo,
%
programma esegue la linea tra i due punti. Perciò l’ ingrandimento più
grande di linee, vengono rappresentate ancora come linee.
Mentre i programmi di processo di immagine, orientati verso Pixels,
funzionano in maniera differente. Se una linea viene ingrandita molto, è
possibile vedere la sua struttura in Pixels.
I programmi CAD lavorano su piani differenti o livelli. La possibilità di
>
disegno tecnico molto complesso. Per esempio, il dimensionamento di
un disegno può essere eseguito su di un livello separato.
Finchè non sarà necessario mostrare il dimensionamento eseguito, possiamo tenere nascosto questo livello.
I programmi CAD con 2 1/2 D sono utilizzati soprattutto in architettura. Le
]
ottenere risultati simili a disegni prodotti attraverso l’utilizzo di programmi
3D, ma in compenso, è necessaria minore capacità del computer.
Programmi CAD 3D generano modelli tridimensionali. I modelli più semplici sono „lattice models“ e i modelli wireframe, che sono necessari per
calcolazioni matematiche. Mentre nei modelli tridimensionali è necessario
La „Computer Aided Manufacturing“ (fabbricazione assistita da computer), abbreviato CAM, permette di inserire informazioni aggiuntive in un
disegno, richieste per la produzione. Queste informazioni possono essere
trasmesse direttamente attraverso l’utilizzo di macchine di produzione.
117
Minos
3.6.2
Conoscenze fondamentali
Macchine col controllo numerico
Macchine col controllo numerico sono chiamate macchine NC, (Nume'\]
ad esempio dimensioni e velocità di reazione, passano attraverso la
macchina sottoforma di numeri.
Le macchine eseguono ogni tipo di operazione in accordo all’ordine
determinato nel programma. Nei vecchi sistemi di controllo numerico, i
programmi venivano immagazzinati su di un nastro di carta.
Nei moderni CNC, (Computerized Numerical Control), non vengono più
usati i nastri di carta. I dati necessari possono essere visti nel Display
e immessi o caricati direttamente nella macchina attraverso l’utilizzo di
un „data carrier“.
Macchine con il sistema DNC sono connesse con altri computers ad un
|'
¤
'¥$
che i computers possono essere collocati in posti differenti.
Siccome i programmi di controllo sono preparati appositamente per il di
Sistemi di coordinate
L’indicazione di punti singoli su un pezzo da/di avviene attraverso le
coordinati. Esistono due sistemi di coordinate fondamentali.
coordinate polare
Polarkoordinaten
Immagine 40:
118
Sistemi di coordinate
coordinate cartesiane
Karte
sische Koordinaten
Conoscenze fondamentali
Minos
Entrambi i sistemi di coordinate hanno un punto zero. Le coordinate di
un punto hanno come riferimento il punto 0. La differenza tra i sistemi di
coordinate consiste nel metodo di determinazione della distanza di un
certo punto.
Nel sistema di coordinate polare, vengono date la distanza dal punto
zero, l’apertura angolare tra i due segmenti di connessione e gli assi.
Mentre nel sistema cartesiano o sistema rettangolare di coordinate, la
distanza del punto 0, viene determinata con la distanza di tutte e due
gli assi.
Il punto zero deve essere piazzato in un posto appropriato concerne il
pezzo di lavoro. Questo potrebbe essere ad esempio una linea di bordo/
contorno oppure l’asse centrale di un foro.
Nel dimensionamento assoluto, tutte le misure partono dal punto zero.
Perciò, i valori di dimensione rappresentano sempre la distanza dal punto
di origine.
Se una certa visuale/veduta contiene soltanto un punto di coordinata
zero, non è necessario disegnare interamente la linea di dimensione al
punto zero.
Immagine 41:
Dimensionamento assoluto
119
Minos
Conoscenze fondamentali
Nel dimensionamento crescente tutte le dimensioni possono essere
disegnate al di fuori dell’oggetto di lavoro. Tutte le dimensioni partono
anche dal punto zero. Questo metodo permette di risparmiare spazio. I
valori di dimensione vengono ruotati di/a 90°.
dimensione precedente è il punto di inizio della prossima dimensione.
Questo viene eseguito nella forma di dimensionamento seriale o a catena.
&
a catena contiene parecchie distanze uguali. In questo caso la misura può
essere digitata una volta soltanto in addizione dei numeri di ripetizione.
Ad ogni modo un disegno dovrebbe contenere possibilmente sempre gli
stessi tipi di misurazione. In certi casi, invece, è anche utile usare diversi
sistemi di dimensionamento.
Immagine 42:
120
Dimensionamento crescente
Conoscenze fondamentali
Immagine 43:
Minos
Dimensionamento progressivo
Quando si riportano delle misure, è anche possibile usare sistemi di coordinamento diversi di misure indpendenti. Le frecce di misura/dimensione,
rendono evidente a quale punto zero si riferisce una misura.
Ad ogni modo, sarebbe bene evitare l’utilizzo di diversi sistemi di coordinazione all’interno di un disegno, perchè questo rende il programma
molto più complicato.
121
Conoscenze fondamentali
Minos
]$
$
sarà possibile usare le tabelle di coordinate o „item numebers“ numeri
di dimensione?
Un numero di cordinata consiste di due numeri separati con un punto. Il
primo valore indica il numero del sistema di coordinate, mentre il secondo indica un numero consecutivo per i punti singoli di questo sistema di
coordinate. Per esempio, il numero di posizione/item 2.4 si riferisce al
quarto punto „di coordinata“ nel secondo sistema di coordinate. che si
tratta del quarto punto nel secondo sistema di coordinate.
Questi numeri di posizione/item sono scritti in una tabelle. Gli assi di coordinata sono indicati dalle lettere maiuscole A, B e C, per tre coordinate.
Quando si usa più di un sistema di coordinate, la cifra viene collocata
dopo la lettera: A1, B1, A2 e B2.
Oltre alle coordinate di punti singoli, le tabelle possono contenere ulteriori
informazioni, come ad esempio il diametro di un foro, „screw threads“ la
I sistemi di coordinate sono divisi in sistemi e sottosistemi. I sistemi che
rientrano nella prima categoria sono indipendenti tra loro; ognuno di loro
ha un proprio punto di origine. I sottosstemi sono associati con i sistemi
normali attraverso una determinata/certa misura/dimension. Perciò il
punto di origine di un sottosistema deve essere misurato con riferimento
alla categoria dei sistemi principali.
Esercizio
122
Risolvete i problemi 47 e 48 dell‘eserciziario!
Conoscenze fondamentali
Minos
Tabella di coordinate (misure in mm)
coordinate del
punto zero
Immagine 44:
foro
filettatura
Tabella di coordinate
123
Minos
124
Conoscenze fondamentali
MECCATRONICA
Modulo 2: competenze
interculturale (parte 1)
Manuale
(concetto)
Christian Stöhr
Christian Stöhr Unternehmensberatung
Germania
Concetto europeo per la Formazione Continua in Meccatronica di
personale esperto nella produzione industriale globalizzata
Progetto UE no. 2005-146319 „Minos“, durata dal 2005 al 2007
Progetto UE no. DE/08/LLP-LdV/TOI/147110 „MINOS++“, durata dal 2008
al 2010
Il presente progetto è finanziato con il
sostegno della Commissione europea.
L´autore è il solo responsabile di questa
pubblicazione (comunicazione) e la
Commissione declina ogni responsabilità
sull´uso che potrà essere fatto delle
informazioni in essa contenute.
www.minos-mechatronic.eu
competenze interculturale
Minos
Índice
1
Introduzione formazione interculturale
9
1.1
1.2
Introduzione
Obiettivi del corso
9
9
2
Che cosa è la cultura?
10
2.2
2.2.1
2.2.1
2.2.3
2.2.4
2.2.5
2.3
+
Elementi della cultura
La cultura materiale come elemento della cultura
Istituzioni sociali come elemento della cultura
L’uomo e l’universo come elementi della cultura
Estetica come elemento della cultura
La lingua come elemento della cultura
Il modello iceberg
3
Le basi della cultura
3.1
3.2
Stereotipi e generalizzazioni di cultura
15
Generalizzazioni di cultura – Le dimensioni di cultura di Geert Hofstede
16
Indice di individualismo (IDV)
17
Indice della differenza di potere (PDI)
19
Indice di insicurezza (UAI)
21
Indice di mascolinità (MAS)
23
Indice di orientamento nel tempo (LTO)
25
I limiti del modello di Hofstede
25
La scala delle dimensioni culturali di Geert Hofstede – Sintesi dei paesi
26
3.2.1
3.2.2
3.2.3
3.2.4
3.2.5
3.3
3.4
/
11
11
11
12
12
13
13
15
4
Caratteristiche di cultura
28
4.1
4.1.1
4.1.2
4.2
4.2.1
4.2.2
4.3
4.3.1
4.3.2
La percezione del tempo e le priorità
Il concetto del tempo monocromo
Il concetto policrono del tempo
L’origine dello stato sociale
Lo stato acquistato
Lo stato attribuito
Comunicazione diretta e indiretta
La comunicazione diretta / Culture con un contesto basso
Comunicación indirecta / culturas con alto contexto
28
28
29
31
31
32
33
34
34
5
Lavorare all’estero
36
5.1
5.1.1
5.1.2
5.2
5.3
5.4
Vivere lo shock culturale
Shock culturale
Metodi per superare lo shock culturale
Il processo del adattamento culturale
Evitare l’uso del criterio di autoriferimento
Osservazioni
36
36
36
37
38
38
7
Minos
competenze interculturale
“La cultura rappresenta la più grande barriera contro il successo economico.”
Edward T. Hall e Mildred Reed Hall
“La cultura è uno strato sottile ma importante che va trattato con attenzione per non danneggiarlo. Persone di culture diverse in fondo sono uguali e reagiscono nella stessa maniera. Renda sicuro che comprende gli usi elementari e faccia vedere interesse e la voglia di comprendere le differenze fra le culture.”
Mike Wills
8
competenze interculturale
1
Introduzione formazione interculturale
1.1
Introduzione
Minos
Con l’aumento della globalizzazione cambia in maniera fondamentale il
modo di governare, del commercio, dell’organizzazione e della convivenza delle nazioni. Le persone non agiscono più dentro le frontiere di un
paese, perché sono diventate parte di una rete internazionale. Oggi più
che mai il successo economico si basa su una conoscenza interculturale
e la capacità di comunicare fra le culture.
La conoscenza culturale fa parte dei campi del sapere più importanti
che le persone e le imprese che lavorano all’estero hanno da imparare
se aspirano alla crescita, al successo e ad un’integrazione nel mercato.
Lavorare con colleghi o clienti di altre culture, incontrarsi, vendere, trattare
$
&
$¥
Î~$
sbagliata o un malinteso può rinviare il lavoro di mesi o anzi rovinarlo.
La comprensione e la percezione di differenze interculturali promuovono
$
orizzonti e portano a risultati concreti, cioè successo nel lavoro e per
l’impresa.
1.2
Obiettivi del corso
L’obiettivo del corso è aumentare la capacità di comprensione dei partecipanti nell’arena globale e di prepararli per soggiorni in altri paesi. Questo
{
­£
delle persone,
- quali problemi nascono se persone di diverse culture interagiscono fra
di loro,
- come la cultura può essere analizzata per il soggiorno all’estero e come
può essere studiata
­ £ professionale e interculturale può essere ridotto,
- come trattare lo choc culturale.
,
La competenza interculturale è la capacità di comunicare con successo con persone di altre culture, cioè la capacità di stare bene con loro.
Questa capacità la si può possedere già da giovane o svilupparla con
l’aiuto di sforzi consapevoli e sistematici. Le basi per una comunicazione
interculturale di successo sono la competenza emotiva e la sensibilità
interculturale.
9
competenze interculturale
Minos
2
Che cosa è la cultura?
+
¡
,
'¥
$|Î$sare, parlare, agire e sentire nella maniera in cui lo facciamo. (Hofstede,
1989)
,
Cultura consiste in codici imparati che stanno in rapporto fra di loro e i
società. Messi insieme questi orientamenti offrono soluzioni possibili
per problemi che hanno da affrontare tutte le società per continuare ad
esistere. (Terpstra e David, 1985)
,
Cultura è una certa misura di standard o prospettive che vengono condivise da un gruppo di persone. Aiutano la persona singola a capire che
cosa c’è, che cosa si sente, che cosa c’è da fare e come qualcosa va
fatto. (Goodenought, 1996)
,
'
basano su di essa, i cui elementi singoli vengono divisi e trasmessi dai
membri di una certa società. (Linton, 1945)
cultura come un sistema di comportamenti e abitudini che vengono
trasmessi da una generazione all’altra. Regole, lingue, religioni, strutture
della famiglia, reazioni e educazione offrono sicurezza e prevedibilità
nella vita quotidiana di un gruppo di persone. Se si incontrano persone
con le stesse convinzioni e gli stessi modi di agire si capiscono e il modo
¥
Î
{
;¥'Î&
¡
^¥Î
Â
$
¡
10
competenze interculturale
2.2
Elementi della cultura
2.2.1
La cultura materiale come elemento della cultura
,
Minos
{
1. il grado delle capacità tecnologiche di una cultura e
2. la sua redditività o come le persone usano le loro capacità e conquiste
Ci sono cose che persone in un paese con un alto standard di tecnica
percepiscono come ‘normali’, che però in altri paesi con un livello basso
riamente hanno familiarità con concetti come p.es. lavori di manutenzione
preventivi.
&£ un luogo. Qualche volta alcuni prodotti non si possono trovare perché
la gente non potrebbe permetterseli o semplicemente non sarebbe in
grado di usarli
2.2.1
.
Rudolf, un meccanico tedesco in Romania, era contento di aver trovato
$
&$
¥'
Î ¥# $ ¡ ' Î
$
sorpreso perché i lavori di manutenzione che conosceva in Germania lì
non esistevano.
Istituzioni sociali come elemento della cultura
,
$
all’altra e fra i paesi. La formazione, l’organizzazione sociale e le strutture
politiche hanno un ruolo non da sottovalutare durante l’interazione.
£
e l’importanza e la struttura della famiglia. Le donne in paesi diversi hanno
ruoli e diritti diversi.
Anche il grado e la qualità della formazione variano fra le culture. Alcuni
paesi offrono una formazione primaria, secondaria e terziaria a buon
$
lo stato e la qualità della formazione di una persona dipendono molto
dalla ricchezza e dallo stato sociale dei genitori.
.
e si trova una percentuale di donne in posizioni alte molto più elevata che
in altri paesi, dove gli uomini con una donna come capo molto probabil
$
specializzati in alcuni paesi come in Germania tradizionalmente è di una
qualità buona e ha ottenuto un stato sociale abbastanza alto, mentre in
altri paesi studi universitari sono più o meno obbligatori per raggiungere
uno stato simile.
11
competenze interculturale
Minos
2.2.3
L’uomo e l’universo come elementi della cultura
,
Di questa categoria fanno parte le religioni come anche credenze, valori
e superstizioni.
Opinioni religiose e qualche volta addirittura le superstizioni possono
$ £ $ azioni delle persone. Mentre le religioni in qualche paese promuovono
l’uguaglianza di tutte le persone, in altri favoriscono più la disuguaglianza.
%&
religione di una persona quali cibi sono permessi (p.es. non maiale o
bovino), o come ci si veste (le donne coprono la testa, uomini portano
la barba). Questi aspetti in alcune religioni sono più visibili che in altri
(islam, ebrei ortodossi).
Altre concezioni possono avere la stessa importanza, come i valori delle
persone. Come valutano il tempo? Con che facilità si adattano a cambia
£
persone in quel luogo. Naturalmente deve anche sapere come questi
$£
2.2.4
.
Thomas è cattolico. Vive in una città grande e tutte le domeniche va in
%
sua chiesa non si bada tanto a queste cose. Durante un soggiorno in un
altro paese Thomas viene invitato da amici a partecipare con loro alla
messa. Si danno un appuntamento in chiesa. Visto che in questo paese
fa molto caldo e che non ha mai visto nessuno vestito molto elegante
&
non può entrare in chiesa, perché quando i suoi amici lo vedono con i
pantaloni corti, lo mandano via. Non sarebbe adatto entrate in chiesa
vestito in quella maniera.
Estetica come elemento della cultura
,
Questa categoria comprende le arti, il folklore, la musica, il teatro ed
d’aiuto dedicarsi a questi aspetti visto che attraverso di loro si può avere
conoscenze importanti.
,
&
cultura. Tramite il teatro si può sapere qualcosa delle convinzioni e degli
aspetti che vengono considerati importanti. E attraverso le tradizioni
£
12
competenze interculturale
2.2.5
Minos
La lingua come elemento della cultura
,
$
¦
¥
Î
$
Non sapere come le si usa può portare a frustrazione e insoddisfazione.
.
¥Î & $%&
numero altissimo di parolacce e i portoghesi hanno la tendenza a usarle
spesso. Nello svedese invece si trovano poche parole sconvenienti e la
comunicazione in generale è molto più cortese.
2.3
Il modello iceberg
&
~
visibile sotto. Allo stesso modo la cultura; alcuni aspetti sono visibili, ma
esiste una parte più grande che rimane invisibile all’occhio.
Nonostante ciò la parte visibile e la parte invisibile stanno in rapporto fra di
loro. Gli aspetti visibili o le caratteristiche di una cultura che determinano
£
p.es. dai valori, le idee, i pensieri, i sentimenti e la fede.
Durante un’interazione interculturale le persone spesso analizzano il
comportamento degli altri con le loro categorie, le loro idee e valori. Così
%&
scordato che questo comportamento per gli altri sarà normale, semplicemente perché corrisponde ai loro valori e idee. Se dunque diciamo che
¥
ÎX
questo comportamento contraddice a quello che noi pensiamo creda
questa persona.
% persone si comportano così si deve imparare qualcosa sui loro valori e
convinzioni.
13
competenze interculturale
Minos
parte visibile della cultura
(comportamento evidente, lingua,
aspetto)
parte invisibile della cultura
(aspettative, impostazione, valori, norma)
#
.
14
$¬¬
19.00. Lui arriva puntuale nel luogo dell’incontro, ma Gaia non c’è. Arriva
un’ora più tardi. Rudolf valuta il suo comportamento come mancanza
­$X
X
‘comprensione’ del tempo e Gaia si è comportata soltanto secondo i suoi
valori, convinzioni e abitudini.
competenze interculturale
3
Le basi della cultura
3.1
Stereotipi e generalizzazioni di cultura
Minos
Stereotipi culturali e generalizzazioni sono due concetti che descrivono
cosa si può pensare di altre persone. Anche se sembrano simili, ci sono
delle differenze importanti che per la comunicazione interculturale sono
di importanza straordinaria.
,
~
$
~
¥
$
Î"§;\
,
La generalizzazione culturale è la tendenza della maggior parte delle
persone di un gruppo culturale a possedere certi valori e convinzioni e di
su esperienze fatte con comportamenti dominanti o preferenze centrali
di un gruppo di persone.
.
]{ ¬
fritte.
$
formaggio.
¬{
fritte.
$
formaggio.
essere puntuali.
Anche se abbiamo bisogno di generalizzazioni per avere un’idea di altre
 prospettive diverse, altri comportamenti e convinzioni. Generalizzazione
Xsone di una cultura agiscano o pensino in un certo modo, ma mai tutti.
Nessuno rappresenta l’insieme delle caratteristiche che vengono attribuite
¡'
"
sul sesso, sull’età, sui gruppi etnici e professionali) le cui caratteristiche
culturali non corrispondono con quelle della maggior parte della società.
Ci sono alcuni altri concetti che in questo contesto sono importanti.
,
'¥
Î
cultura di una persona è la soluzione naturale e migliore di fare le cose.
,
valutate da un‘unica prospettiva assoluta, sia etica o morale. Valutazioni
$
$
valori, l’etica o la morale di una cultura non possono mai essere valutati
del tutto migliori o peggiori di quelli di altre culture.
15
competenze interculturale
Minos
3.2
,
>
X%
di persone con diverse forme di pensare e vivere. Nel caso ideale questo
$
$
tradizioni culturali di altre persone.
Generalizzazioni di cultura – Le dimensioni di cultura di Geert Hofstede
­
Â$lesso con numerosi aspetti e sfaccettature. Visto che per un soggiorno
all’estero è necessaria una preparazione per adattarsi alla cultura del
posto è necessario un modo semplice per pensare alla cultura che
#
ha bisogno di un modello di cultura che offre le informazioni corrette in
maniera comprensibile.
~
®$
ricerca su differenze culturali fra le più grandi mai fatte in maniera empirica intervistava in numerosi paesi gente sulle sue convinzioni e valori.
Considerando i risultati è riuscito a ridurre la complessità di una cultura
in 5 dimensioni fondamentali.
;
2.
3.
4.
5.
Distanza nel potere
Evitare insicurezza
Mascolinità
Orientamento a lungo termine
Secondo Hofstede le culture si distinguono fra di loro più fondamentalmente nella maniera in cui considerano questi concetti e come reagiscono su
#
&
{'&
_
&
{
fondamentali. Spesso sono la fonte di un vasto spettro di valori concreti
e convinzioni e normalmente i comportamenti delle persone possono
essere spiegate con uno di questi aspetti (o una combinazione fra di loro).
²
£
£$
individui o gruppi con diversa origine culturale. Come primo approccio
offrono una struttura per l’analisi di culture che può essere usata per la
preparazione di un soggiorno all’estero.
#
{
{
altri e che le loro famiglie o organizzazioni, a cui appartengono, dovrebbero prendersi cura di loro.
16
competenze interculturale
Minos
{
$
considera normale.
<
{
$
prevedibili piuttosto che situazioni non strutturate.
X{
La forza con cui una cultura favorisce dominanza, autostima e l’accumulo
di possesso materiale. rispetto a questo sta una cultura che si basa di
più sulle persone, i sentimenti e la qualità della vita.
¦{
$ presente, così p.es. il rispetto di fronte a tradizioni e l’adempimento ai
doveri sociali.
Se si programma un soggiorno lavorativo in un paese straniero aiuta uno
sguardo sui valori e punti del paese nella sintesi delle dimensioni culturali
per farsi una prima idea di quello che ci si può aspettare da persone di
quel paese.
$X
$
$$
inoltre alcuni consigli per persone che lavorano in un paese con valori
molto diversi dal proprio.
3.2.1
Indice di individualismo (IDV)
,
L’individualismo è il grado in cui le persone preferiscono agire più come
$
di individui o di gruppi? Le persone tendono a prestare attenzione soltanto a se stesse e alla loro famiglia? O c’è una ‘cornice’ sociale, in cui
le persone applicano differenze fra il ‘gruppo proprio’ ed altri gruppi e
aspettano che il proprio gruppo li rispetti?
%
¥Î X
e le persone di queste culture trovano normale realizzarsi e scoprire le
proprie qualità.
.
]~
¤%
§
'¬
17
competenze interculturale
Minos
Le società collettivistiche si trovano dall’altra parte di questa dimensione.
¬
>¥Î
della comunità è di grande importanza. Nelle culture collettive le persone
si sentono meglio in un gruppo e vogliono stare in rapporto con gli altri.
Verso la famiglia c’è un forte rapporto di responsabilità. Le persone
tendono a vedersi come membri di diversi gruppi. Si aspetta e apprezza
la conformità.
.
'
'§garia e Romania.
/??0
Note riferite sul lavoro in paesi con un altro IDV:
%
²{
- Si aspetta dalla persona che lavori autonomamente e di propria iniziativa. Non si deve aspettare aiuto dal gruppo.
- Lo stile di comunicazione è molto diretto e orientato ai compiti.
- Vita lavorativa e vita privata possono essere separate senza problemi.
- Addetti o persone in posizioni gerarchicamente più basse spesso si
aspettano che sia possibile lavorare in progetti e risolvere i problemi autonomamente. Mischiarsi troppo col loro compito può essere interpretato
in maniera negativa.
­%
$$#
per gli incontri, le presentazioni e i lavori di gruppo.
- Si dovrebbe capire che viene tollerato un certo grado di individualità,
p.es. per quanto riguarda il modo di vestirsi e alcuni comportamenti.
18
competenze interculturale
Minos
%
²
{
- Le persone spesso mettano al centro la famiglia, ancora prima del lavoro.
­
£niera cortese.
­~ perché imbarazzante per la persona.
- Le promozioni si basano sugli anni passati in azienda e le esperienze
Â
- Trovare una soluzione può essere un processo molto lento visto che
interpellate tante personedi diverso livello gerarchico.
3.2.2
Indice della differenza di potere (PDI)
,
La differenza di potere include la gerarchia e la posizione di individui
nella società. Si riferisce al grado di disuguaglianza che viene accettato
dalle persone. Sono tutti uguali o le differenze di potere vengono visti
$
¦
la propria opinione, che va valutata in modo equo, o una persona di grado
più alto ha diritto a decidere da sola?
]
"\%
riconosciuto come una parte normale della società e la posizione di un
individuo ha meno a che fare con le proprie capacità. Le persone non
trovano strano che esistono delle grande differenze nello stato sociale,
nei redditi e nella divisione del potere. Spesso le religioni favoriscono
la disuguaglianza e il potere più della legge. Le istituzioni tendono a
dimostrare apertamente il loro potere.
.
Esempi sono tanti paesi arabi, latinoamericani e africani, la Russia, la
]%}§
un valore abbastanza alto.
$$
imposto dalla natura, ma deve avere ragioni pratiche. Eccetto questo
aspetto si tende ad avere l’opinione secondo cui tutti dovrebbero avere
gli stessi diritti ed una posizione sociale in rapporto alle proprie capacità
e competenze.
.
$$
19
Minos
competenze interculturale
+
Note per il lavoro in paesi con un altro PDI:
%
%{
- Addetti di livello gerarchico più alto dovrebbero essere trattati con rispetto
e non dovrebbero essere contraddetti troppo spesso.
­$
$
$
ai propri subalterni dovrebbero assumere un comportamento piuttosto
autoritario. Non tutte le decisione vanno necessariamente discusse.
- Le istruzioni per le persone con cui si lavora dovrebbero essere precise
e chiare.
­
"
risolvere un problema)
- Non ci si aspetta che addetti di un livello più basso prendano l’iniziativa.
- Ci sia molta burocrazia.
%
%
{
- Capi vengano trattati con meno rispetto, paragonato ai paesi con un
%
- Non è strettamente necessario comportarsi in maniera formale e le
persone vogliono conoscersi in un modo più amichevole.
­
>
- Nel prendere una decisione vanno coinvolte altre persone.
­¬
vanno evitati.
20
competenze interculturale
3.2.3
Minos
Indice di insicurezza (UAI)
,
certa cultura preferiscono situazioni con regole chiare, leggi e prescrizioni
davanti a situazioni non strutturate. ‘Evitare insicureza’ si riferisce p.es. sul
grado di essere pronto di assumersi un rischio delle persone o descrive
in che maniera membri di un gruppo di coordinazione preparerebbero un
ne e se le cose vanno da sé (e vengono aspettati poi meglio o peggio).
qualcosa di negativo. Cose che sono diverse vengono valutate pericolose. Le persone in queste società si vedono minacciati da situazioni non
chiare e cercano di evitargli con regole e altre misure di sicurezza. Le
persone tendono a preferire struttura, precisione e formalità.
Questi paesi spesso sono molto omogenei e chiusi verso cambiamenti
e innovazione.
.
~
¬¬%
Se l’indice è basso l’insicurezza viene considerata come qualcosa di normale e naturale. Molto probabilmente si incontreranno persone rilassate
e non molto rigide. Tendono a non evitare i rischi e ad essere più aperte
questi paesi spesso sono abbastanza giovani e vengono caratterizzati
X
£
.
%
]~¤
Danimarca, la Svezia, la China e Singapore.
21
Minos
competenze interculturale
/??
Note riferite al lavoro con un altro UAI:
%
~{
- Se si cerca di essere innovativo sul posto di lavoro e di provare metodi
X
&
%getti molto probabilmente avrà bisogno di tanta fatica e pazienza, prima
che le proposte verranno accettate dagli altri.
- Si dovrebbe essere preparati ad aver a che fare con un sistema molto
burocratico.
- Nel progetto dovrebbero collaborare quanto più possibile connazionali
per poter sviluppare conoscenza e abbassare il grado di insicurezza.
- struzioni, proposte, presentazioni e risposte a domande dovrebbero
X
- Tutte le dichiarazioni dovrebbero essere avvalorate da fatti oggettivi e
statistiche.
%
~
{
­²
£
X$zioni.
- Si dovrebbe essere pronti a realizzare accordi presi in precedenza,
perché ci si aspetta che vengano realizzati.
- Gli addetti dovrebbero essere autonomi e avere a disposizione spazi
liberi, metodi e mezzi adatti a compiere i compiti.
22
competenze interculturale
3.2.4
Minos
Indice di mascolinità (MAS)
,
Mascolinità e femminilità non dovrebbero essere fraintesi con i sessi
$%
$
che rappresentano persone in una società. Certi valori vengono considerati ‘mascolini’, p.es. successo, capacità di imporsi, ambire a ricchezza
e l’orientamento verso buone prestazioni. Altri sono ‘femminili’, come
X X
$
X
X
rendimento, competizione, possesso e crescita. Si vive per lavorare.
~
X
£
vengono risolti prevalentemente in maniera aggressiva.
.
%
]¬
~
la Svizzera hanno un alto valore di mascolinità, come anche il Giappone.
$"
\
X>$porti sociali e qualità della vita. Si lavora per vivere. A uomini e donne
£
trattative evitando aggressività.
.
%
§
]
tale indice.
/?$
23
Minos
competenze interculturale
Note per un lavoro nei paesi con un altro MAS:
­
X
$
ordinari, brevi vacanze e viaggi di lavoro.
- La vita lavorativa sarà presente dappertutto, anche negli incontri informali.
- Tutte le questioni personali dovrebbero esulare dalle situazioni lavorative.
- Le persone non sempre sono interessate a coltivare amicizie strette.
­ > $ breve e priva di emozioni.
­%X>
professionale che la famiglia o i contatti sociali.
­%X
sulla concorrenza.
%
]
{
- Le persone apprezzano il tempo libero, mettono in primo piano la famiglia
e fanno vacanze lunghe.
- Gli straordinari non sono la regola.
- Le conversazioni nel tempo libero o durante le pause di lavoro si baseranno più su vita e interessi delle persone che su questioni dell’impresa.
- Domande personali vengono considerate normali e non invadenti.
­$
>
­
persone dimostrano apertamente la loro preferenza a rapporti stretti.
24
competenze interculturale
3.2.5
Minos
Indice di orientamento nel tempo (LTO)
Questa dimensione non è stata sviluppata sistematicamente da Hofstede.
$
'
importanti per un confronto fra mondo occidentale e orientale, ma non
%&
X
maniera approfondita.
,
$
sioni di una società si basano sulla tradizione, su avvenimenti nel passato
o su obiettivi a breve o lungo termine.
~
ranti, parsimoniose e che abbiano senso di vergogna. Coltivano relazioni
secondo lo stato sociale e rispettano tale gerarchia.
.
¬'
~
avvengono più velocemente i cambiamenti perché tradizioni e doveri non
rappresentano una barriera.
3.3
.
]~$¤
I limiti del modello di Hofstede
Æ$
%
dello non spiega però, perché devono esistere proprio cinque dimensioni
>
a spiegare su che base si sviluppano le diverse culture. Hofstede è stato
criticato per aver guardato alla cultura come una caratteristica di un paese
e non alla diversità culturale come causa di sottogruppi etnici, regionali
e generazionali. La descrizione delle dimensioni ha anche il pericolo di
valutare alcune culture più sviluppate di altre. Nonostante ciò il modello
può essere considerato utile per la preparazione di un soggiorno all’estero.
%
Æ$
vengono di seguito riportati e offrono così uno strumento d’aiuto per chi
è diretto in un paese straniero.
25
Minos
3.4
competenze interculturale
La scala delle dimensioni culturali di Geert Hofstede – Sintesi dei paesi
%Ï$$
²Ï
]Ï
X
~Ï
¦Ï
26
Paese
Il mondo arabo
Argentina
Australia
PDI
80
49
36
IDV
38
46
90
MAS
52
56
61
UAI
68
86
51
Belgio
Brasile
Cile
China
Costa Rica
Danimarca
Germania
Ecuador
El Salvador
Finlandia
Francia
Grecia
Gran Bretagna e
Irlanda Nord
Guatemala
Hong Kong
India
Indonesia
Iran
Irlanda
Israele
65
69
63
80
35
18
35
78
66
33
68
60
35
75
38
23
20
15
74
67
8
19
63
71
35
89
54
49
28
66
21
16
66
63
40
26
43
57
66
94
76
86
30
86
23
65
67
94
59
86
112
35
95
68
77
78
58
28
13
6
25
48
14
41
70
54
37
57
56
46
43
68
47
101
29
40
48
59
35
81
Italia
50
76
70
75
Giamaica
Giappone
Canada
Columbia
45
54
39
67
39
46
80
13
68
95
52
64
13
92
48
80
Malaysia
104
26
50
36
LTO
31
65
118
31
25
96
61
80
23
competenze interculturale
Minos
Paese
Mexico
Paesi Bassi
Nuova Zeelanda
PDI
81
38
22
IDV
30
80
79
MAS
69
14
58
UAI
82
53
49
LTO
44
30
Norvegia
Pakistan
31
55
69
14
8
50
50
70
20
0
Panama
Peru
Filippine
Polonia
Portogallo
Africa dell´est
95
64
94
68
63
64
11
16
32
60
27
27
44
42
64
64
31
41
86
87
44
93
104
52
Austria
11
55
79
70
Svecia
Svizzera
Singapore
Spania
África del Sud
Corea del Sud
Taiwan
Tailandia
Repubblica Ceca
Turchia
Ungheria
Uruguay
Stati Uniti
Venezuela
Africa del ovest
31
34
74
57
49
60
58
64
35
66
46
61
40
81
77
71
68
20
51
65
18
17
20
58
37
80
36
91
12
20
5
70
48
42
63
39
45
34
45
45
88
38
62
73
46
29
58
8
86
49
85
69
64
74
85
82
100
46
76
54
19
25
33
48
75
87
56
29
16
27
competenze interculturale
Minos
4
Caratteristiche di cultura
Dopo la spiegazione dell’approccio generale di Hofstede il quarto capitolo
si dedicherà alle caratteristiche concrete di cultura, che si presuppone
£
%
ciò va rispettato quando ci si muove in un altro paese.
4.1
Le diverse caratteristiche tipiche per le dimensioni potrebbero non essere
sempre consistenti. Tutte le caratteristiche però tendono verso l’uno o
l’altro polo del continuo
La percezione del tempo e le priorità
<
T. Hall. A prima vista il tempo sembra un concetto molto semplice. Nonostante ciò tutte le culture hanno una concezione unica del tempo e del
modo di usarlo. Alcune culture tendono ad adorare il tempo e a trattarlo
>
£
si preferisce parlare degli affari solo dopo un certo tempo iniziale.
Le culture possono essere distinte, in base all’uso del tempo, in culture
monocrone (sequenziale) e policrone (sincrone).
& & XÂ
{
4.1.1
Il concetto del tempo monocromo
,
]
razioni in sequenza, in serie, cioè un’azione segue un‘altra e i per ogni
$
Â
una risorsa limitata. Si fa una cosa in un dato momento e nonostante le
circostanze è necessario concluderla prima di iniziarne un‘altra.
%]
{
passato, presente e futuro. Viene utilizzato per strutturare la giornata per
X%
28
competenze interculturale
Minos
d
a:
Le persone con un concetto di tempo monocrono tendono
- fare una sola cosa alla volta
- concentrarsi sul lavoro
- prendere sul serio promesse (termini, appuntamenti)
- avere poco ‘contesto’ e avere dunque bisogno di tante informazioni
- essere ‘legate’ al lavoro
- rispettare programmi
- essere preoccupate di non disturbare gli altri, di seguire le regole della
privacy e del rispetto
- dimostrare grande rispetto per la proprietà privata, e prestare qualcosa
raramente
- essere rapide
- essere abituate a rapporti a breve termine
4.1.2
.
Paesi tipici, in cui le persone hanno concetti di tempo monocroni, sono
la Germania, gli Stati Uniti, la Svizzera, la Svezia, la Norvegia e la Danimarca.
Il concetto policrono del tempo
,
Il termine divisione policrona del tempo descrive il contrario di monocrona:
tanti si assolve a più compiti per volta e le persone si sentono molto più
&
>
scadenze. Il tempo viene considerato ‘servo’ e ‘mezzo’ e viene adattato
ai bisogni delle persone. C’è sempre tempo a disposizione e non si ha
mai troppo da fare. Le persone spesso hanno – secondo le circostanze
Â
$
qualcosa prima di iniziarne un’altra, e nemmeno concludere qualcosa
con una persona prima di dedicarsi ad un‘altra.
Il tempo policrono viene considerato meno come risorsa e può essere
paragonato più ad un punto che ad una linea.
Persone con un concetto di tempo policrono tendono a:
- fare tante cose in un momento,
- non essere concentrate e ad interrompere gli altri,
- fare promesse in relazione ad un concetto di tempo indicativo da rispettare solo se se possibile
- avere un contesto e tante informazioni,
- sentire molto i doveri verso gli altri e nei rapporti sociali
- cambiare i programmi spesso e con facilità
- rispettare più le persone che sono vicine (famiglia, amici, colleghi) che
la privacy
- prestare le proprie cose con facilità,
- prontezza nel relazionarsi
- costruire rapporti che durano a lungo.
29
competenze interculturale
Minos
.
Concetti policromi del tempo si trovano soprattutto in Asia, negli stati
]]<}
Note riferite al lavoro in paesi che hanno un altro concetto
del tempo:
¥
||
$
|
$$
¥"<ÆÆ;[\
Se fra membri di diverse culture ci sono diversi modi di concepire il tempo
a causa di diverse valutazioni vengono ‘prodotte’ diverse emozioni che
possono portare ad equivoci.
{
- appuntamenti, programmi, tempi di preparazione ecc. di solito sono
molto preciso. Si dovrebbe p.es. arrivare in tempo e programmare incontri
con un po’di anticipo. La puntualità è importante.
­
Â
rapporti che sembrano inutili per il futuro vengono interrotti.
- aumenti di livello si basano spesso su prestazioni recenti e probabili
successi nel futuro,
- spesso si trovano anche diverse valutazioni del tempo nei diversi reparti
%
X
spesso pensano in maniera monocroma e orientata al presente. Queste
persone spesso hanno problemi in competizione legate a gruppi lavorativi
indipendenti dal reparto.
%
{
- si è molto meno precisi riguardo ad appuntamenti, programmi, tempi
di preparazione ecc.
- le persone tendono a orientarsi al gruppo. Vedono i rapporti come legami profondi a lungo termine che includono passato, presente e futuro.
Anche nel lavoro si cercano rapporti con questo orientamento.
- anche i lavoratori tendono a preferire contratti a lungo termine. Aumenti
Â
personali,
- spesso anche nella stessa azienda si trovano diverse concezioni di
tempo. Reparti come marketing e pubblicità spesso pensano in maniera
policrona perché hanno una funzione policrona. Si integrano meglio in
un gruppo di persone provenienti da diversi riparti perché riescono a
trattare meglio più cose contemporaneamente.
30
.
¥;^[[Î&
;^;^[>
tardi. Lo stesso vale per le scadenze.
competenze interculturale
4.2
Minos
L’origine dello stato sociale
L’origine dello stato sociale si riferisce al modo in cui le persone ottengono il proprio ruolo o il proprio status in un paese o in
un’organizzazione; ma anche ai doveri legati ad un certo status.
Questo concetto è collegato ad alcune caratteristiche dell’indice di
differenza di potere e dell’indice di individualismo di Hofstede. Nonostante ciò ci sono alcuni aspetti che non vengono presi in considerazio
%&
X
trattato in un capitolo separato.
Lo stato sociale esiste in tutte le società, ma il modo in cui viene
percepito, raggiunto e le diverse reazioni variano da cultura a cultura.
$
¥
all’essere (Kluckholm e Strodtbeck, 1961).
4.2.1
Lo stato acquistato
,
­$
Â
X
classe sociale, il grado di formazione, l’età, il patrimonio, la formazione
o il sesso. Qualità di successo nell’ambito del lavoro contano più delle
qualità esterne e le persone vengono rispettate in base alla propria
capacità e prestazione professionale. Lavorando duramente e con
X
£
~
$
e molto meno in base ai rapporti sociali personali o familiari o la fama
della propria formazione.
&
vengono mantenuti risultati adeguati. Ognuno guadagna il proprio stato e a seconda delle circostanze questo può cambiare velocemente.
>
>
non si comportino da superiori, quando messi a confronto con persone
>
non è molto diffuso parlare di stato sociale, sottolinearlo o dedicargli
attenzione.
}
]~
¬
§
31
competenze interculturale
Minos
4.2.2 Lo stato attribuito
,
<
stono poche possibilità di raggiungere un determinato stato sociale con
prestazioni e successi. Se qualcuno ha le caratteristiche esterne giuste,
gli viene attribuito automaticamente lo stato sociale corrispondente che
$X
Si è molto consapevoli del proprio stato e non si dovrebbero assumere
importanti e dovrebbero essere utilizzati sempre. Esistono poche possibilità di ottenere uno stato sociale con successo o buone prestazioni.
.
}'¬
Note riferite al lavoro in paesi che hanno un‘altra origine dello
stato sociale:
{
- esistono delle gerarchie, ma sono meno formali e evidenti,
- le norme sul posto di lavoro possono essere meno formali, p.es. le
¥Î
essere formali con i colleghi di livello più alto,
- i manager possono avere il ruolo di mentore. Sono punto di riferimento
e guidano i subalterni per garantire che possano sviluppare lo proprie
capacità e assolvere ai vari compiti con una minima supervisione.
- i subalterni possono mettere in questione le decisioni del proprio capo,
­£
$$
'
p.es. è possibile parlare ad una persona di un livello superiore di un altro
reparto per coordinamenti o ottenerne un feedback.
32
competenze interculturale
Minos
{
­
>%
propri compiti e a non avanzare proposte a lavoratori di livello superiore.
- sul posto di lavoro spesso si è molto formali, p.es. ci si chiama con
titolo e cognome. Ordini professionali come dottori, architetti e giudici si
aspetteranno di essere chiamati con i loro titoli.
- dai manager ci si aspettano indicazioni chiare e in grado di rispondere
a tutte le domande. Vengono considerati esperti e sempre capaci di ri
$~
il ruolo di mentore.
- Normalmente i lavoratori non criticano le decisioni di un capo.
­£
$
&
tanto con il proprio capo e non p.es. con persone di un livello superiore
neanche di un altro reparto.
4.3
Comunicazione diretta e indiretta
'­
fondamentale della cultura. Durante qualsiasi processo di comunicazione
&
Quando si ‘manda’ un messaggio è quasi impossibile non aggiungere
contenuto culturale, nelle parole stesse, nella pronuncia o in segnali non
verbali, che accompagnano la comunicazione.
#
interpretata da diverse persone in modi diversi, a sua volta differente
magari dalle intenzione del mittente di tali informazioni.
,
Le informazioni intorno ad un avvenimento ne rappresentano il contesto.
Descrivono la misura di comprensione innata e, nella maggior parte dei
casi, non consapevole che ci si aspetta da una persona in una certa
situazione di comunicazione.
&
di comunicazione, il quale può variare da cultura in cultura.
33
competenze interculturale
Minos
4.3.1 La comunicazione diretta / Culture con un contesto basso
,
Culture con un contesto basso tendono ad essere lineari, logiche, orientate all’azione, spesso eterogenee e individualistiche. Logica, fatti e
linearità vengono apprezzati. Le decisioni si basano più spesso su fatti
$
Le persone di solito non ne sanno molto e esistono soltanto poche ipotesi
possibili su di un‘altra persona. La gente non si può riferire al contesto cioè a qualcosa che in una certe situazione viene detta o fatta sempre - o
pretazione verbale. Lo scopo principale della comunicazione spesso è
$%&
$
.
%
]~¬
Svizzera e i paesi scandinavi.
4.3.2 Comunicación indirecta / culturas con alto contexto
,
Culture con un contesto alto tendono ad essere orientate ai rapporti inter
£
#
culture preferiscono l’armonia del gruppo e il consenso di fronte a buone
prestazioni dei singoli. Le persone di queste culture si lasciano guidare
>
X'&
è un passo importante per qualsiasi cooperazione.
%
reti d’informazione molto vaste e tanti contatti personali. Visto che queste culture tendono ad essere collettivistiche la gente collabora in modo
molto stretto e conosce l’opinione generale. Lo scopo principale dello
scambio d’informazione è mantenere l’armonia ed evitare a chiunque
Le parole non sono così importanti come il contesto, il suono della voce,
la mimica, i gesti e la postura dell’interlocutore, piuttosto che la storia
della famiglia di una persona o il suo stato sociale. Le persone hanno idee
molto evolute sui comportamenti in diverse situazioni. Le informazioni
fornite in un certo momento sono essenziali poiché molto è già noto alle
persone che comunicano.
34
competenze interculturale
Minos
%&
$
>
parole dette.
.
¬
$
considerati culture con un contesto alto.
Note riferite al lavoro in paesi con un altro contesto e stile di
comunicazione:
Qualche volta il modo in cui viene detto qualcosa è più importante di ciò
che viene detto. Se una persona, che solitamente usa una comunicazione diretta, si trova per motivi di lavoro in un paese con una comunicazione indiretta, sembrerà sempre che parli un‘altra lingua anche se
utilizza quella corrente. Diversi modalità di comunicazione aumentano
X
%&nicazione interculturale è molto importante prestare attenzione sia alee
$
%
un alta misura di attenzione.
%
{
­%
&
essere preso alla parola.
- Su trattamenti normalmente seguono contratti espliciti.
­%
$²
~
con un contesto alto può essere percepito come qualcuno che parla troppo, che è troppo preciso e che mette a disposizione troppe informazioni.
{
- possono nascere equivoci dal fatto che i diversi modi di comunicare
non vengono considerati.
- Le persone tendono a decidere sulla base di meno informazioni visto
vi è un aggiornamento continuo sui fatti.
­%
{
;~
^%$
3. Cambiare argomento per evitare di dire No.
4. Rispondere con una domanda in cenno di dissenso.
5. Tornare ad un punto della discussione per segnalare una diversa
opinione.
35
competenze interculturale
Minos
5
Lavorare all’estero
L’ultimo capitolo sarà dedicato a problemi di motivazione che potrebbe chi
si trova a lavorare in un paese straniero. Vengono offerti alcuni consigli
$X
5.1
Vivere lo shock culturale
5.1.1
Shock culturale
X
>
comportarsi eventualmente vanno imparato nuovamente. Geert Hofstede
¥
Î
,
se una cultura sembra molto simile alla cultura del proprio paese ci possono essere differenze notevoli che possono portare a stati di solitudine,
paura, preoccupazione, isolamento, di impotenza e di odio nei confronti
#
¥
Î
]
$$¥
Î
chie prospettive su all’improvviso vengono a mancare (non sono più utili).
5.1.2
Metodi per superare lo shock culturale
Ci sono diversi metodi e strategie di contrasto allo shock culturale, con cui
$]
{
1. si renda conto che lo shock culturale è un processo normale
durante l’adattamento ad un nuova cultura. Ci sono tante persone
che soffrono, non hanno sofferto e soffriranno tale situazione.
^
Â
culturale ha bisogno di tempo.
3. impari la lingua e non sia imbarazzato di portare un vocabolario con
sé. Se le persone sanno che prova di parlare la loro lingua la aiuteranno
più volentieri.
}
ad un corso. Questo aiuterà ad entrare in contatto con altre persone.
5. Sia realista. Non tutte le emozioni negative si basano sulla cultura.
$
6. Si metta in contatto con persone che possono essere d’aiuto.
7. Si informi già prima del viaggio sulla nuova cultura.
8. Si goda ogni passo che va avanti nel suo processo di adattamento. Anche piccoli successi servono a sentirsi bene e facilitare i passi successivi.
36
competenze interculturale
5.2
Minos
Il processo del adattamento culturale
 >$Â
&
$
®$
{
}
;{
Nella prima fase si è entusiasti di vivere in un‘altra cultura e di percepire
differenze. Le sensazioni sono paragonabili a quelli che si hanno durante
una vacanze in un paese straniero.
}
^{
$
$
$
nuova cultura. A questo punto inizia lo shock culturale. Non ci si sente
$X
>
>
trattati come ospiti ma ci si aspetta che si affrontino le diverse situazioni
normalmente. Le frustrazioni possono portare velocemente a sentimenti
di ansia e di isolamento.
}
{
'
$
>
&
%
$
è necessario molto impegno.
}
{
Questa fase viene raggiunta quando si riesce a raggiungere uno stato
emotivo stabile, segno di adattamento alla nuova cultura. Ciò non deve
$
prendono le ragioni della maggior parte dei comportamenti. Si è in grado
di interagire con abbastanza successo rispettando le regole della nuova
cultura.
37
Minos
5.3
competenze interculturale
Evitare l’uso del criterio di autoriferimento
La tendenza ad usare le proprie convinzioni ed i propri valori per valutare
$$$
che l’antropologo J.A. Lee per descriverlo ha sviluppato l’espressione
‘criterio di autoriferimento’. Questa tendenza può essere talmente forte
da disturbare il processo di adattamento culturale.
Lee descrive un processo in quattro passi che aiuta a riconoscere le
differenze culturali che probabilmente possono portare a dei problemi.
~
{
1. Analizzi la situazione in riferimento a i suoi valori culturali, usanze e
particolarità.
2. Analizzi la situazione in riferimento a valori culturali, usanze e particolarità del nuovo paese.
¦
£$
&£
¦
£
del criterio di autoriferimento e si comporti in maniera di cui possono
5.4
Osservazioni
> attenta osservazione aiuterà ad ottenere informazioni e prospettive necessarie per capire un‘altra cultura e adattare il proprio comportamento
alla situazione.
Le seguenti domande aiuteranno a trovare le risposte che permettono di
{
Comportamento di fronte al potere
- Come gli addetti trattano i propri capi?
- Come i capi trattano gli addetti?
- Si percepisce che i capi deleghino la propria autorità o la chiedono
soltanto per se stessi?
- Normalmente i lavoratori prendono l’iniziativa o aspettano istruzioni?
- Con chi vanno a pranzo le persone? Mangiano soltanto con persone di
pari livello gerarchico o anche con altre?
38
competenze interculturale
Minos
L’uso del tempo
- Le persone arrivano puntuali a lavoro? Chi è puntuale e chi no?
- Che cosa succede quando uno degli interlocutori riceve una chiamata?
- Come si comporta una persona che incontra altre due persone che
stanno già parlando?
- Le riunioni di lavoro iniziano puntuali?
- Quanto bisogna aspettare persone con cui si ha un appuntamento?
Modi di comunicazione
­'£
- Come viene espressa una diversa opinione?
- Come vengono comunicati dubbi e brutte notizie?
­#$
- Durante un discorso le persone sono più dirette o più indirette?
- Sembra che sul posto di lavoro ci sia un contesto alto o basso?
Comunicazione non verbale
- Com’è vestita la gente?
- Come ci si saluta di mattina?
­#
$
esce?
- Quando si parla ci si guarda direttamente negli occhi?
- Che distanze mantengono le persone quando stanno in piedi?
Norme al posto di lavoro
- Quando interagiscono le persone parlano direttamente del compito o
parlano più di fatti generali?
- Si lavora insieme o in modo indipendente?
­~
]
- Quale comportamento viene tenuto dai colleghi?
- Come si confrontano le persone con il rispetto di regole?
39
Minos
competenze interculturale
Riferimenti
§"<\";\{§
'
$'
©%
¬%~
À'"<
\{§
¦$|§
Æ<Æ";ª\Æ$$
{§
|
À
|©
Æ<Æ";[\{~
'
$$
¬
}
©
%
Æ$
¬";ª\{'
¦
{]$|$
"^\|©¬|­Æ
Æ$
¬"^[[;\{'
'
"^\{'
²
§
¦
Thousand Oaks. Sage
}]";;\{²
<
|%
À
";\{'
¦
¦
Æ
§
|"­\;[­;;
";_\{'§$%
|©
²]";;\{'<$
§
"\]|
%
­$}"<\";\{%
$
¿
|%
§
%'
"\{'
¿
'<
{|||­$
{||||
40
competenze interculturale
Minos
Ringraziamento
Comportamento sociale, competenza interculturale è un modulo autono
¦]
dalla Commissione Europea.
L’autore ringrazia Andre Henschke, Geert Hofstede, Macus Garson,
§
~'²
correzioni del materiale.
~
materiale e di migliorarlo sfruttando la loro esperienza pratica. Si ringrazia
%'
Commissione Europea per il contributo economico.
41
MECCATRONICA
Modulo 2: gestione del progetto
(parte 2)
Manuale
(concetto)
Andre Henschke
Henschke Consulting Dresden
Germania
Concetto europeo per la Formazione Continua in Meccatronica di
personale esperto nella produzione industriale globalizzata
Progetto UE no. 2005-146319 „Minos“, durata dal 2005 al 2007
Progetto UE no. DE/08/LLP-LdV/TOI/147110 „MINOS++“, durata dal 2008
al 2010
Il presente progetto è finanziato con il
sostegno della Commissione europea.
L´autore è il solo responsabile di questa
pubblicazione (comunicazione) e la
Commissione declina ogni responsabilità
sull´uso che potrà essere fatto delle
informazioni in essa contenute.
www.minos-mechatronic.eu
gestione del progetto
Minos
Índice
1. Il lavoro in un progetto oggigiorno
1. 1 Il lavoro in un progetto nel passato
1. 2 Le fasi dello sviluppo del lavoro nel progetto
1. 3 Origine di principi di organizzazione di progetti
1. 4 I nove campi del sapere nel management del progetto
2. Un progetto – condizioni e caratteristiche
2. 1 DIN 69901
3. Tipi di progetti
3. 1 Progetti di investimenti
3. 2 Progetti di ricerca e di sviluppo
3. 3 Progetti di organizzazione
3. 4 Programma della struttura del progetto
3. 5 Particolarità nel management internazionale del progetto
3. 5. 1 Scopi dell’internazionalizzazione
3. 5. 2 Tipi di obiettivi di internazionalizzazione
3. 5. 2. 1 Scopi economici e non economici dell’internazionalizzazione
3. 5. 2. 2 Scopi difensivi e offensivi dell’internazionalizzazione
3. 5. 2. 3 Scopi orientati alle risorse, ai prodotti e alla vendita
_£
4. Programmazione e scopi nel management del progetto
4. 1 Management del progetto operativo
4. 2 Management del progetto tattico
4. 3 Management del progetto strategico
5. Un progetto e le sue fasi
5. 1. Idee sul progetto e fase iniziale
_^
5. 3 Analisi sulla realizzabilità
5. 4 Incarico e Kick Off
__] _]
5. 7 Programmazione del progetto
5. 8 Sorveglianza del progetto
5. 9 Valutazione del progetto
5. 10 Management del progetto in gruppi responsabili per i diversi processi
5. 10. 1 Gruppo responsabile per la fase iniziale
5. 10. 2 Gruppo responsabile per la programmazione
5. 10. 3 Gruppo responsabile per lo svolgimento
5. 10. 4 Gruppo responsabile per il comando
5. 10. 5 Gruppo responsabile per il compimento
6. Organizzazione del progetto
6. 1 Pura organizzazione del progetto
6. 2 Coordinazione del progetto
6. 3 Organizzazione in forma di matrice
6. 4 Conclusione: caratteristiche dell’organizzazione del progetto
7. Guida del progetto
7. 1 Il capo del progetto
5
5
6
7
8
8
9
10
10
11
12
12
12
13
13
15
15
;
17
17
17
17
18
19
;
19
20
^[
^[
21
22
22
22
23
23
24
24
24
25
25
26
26
27
28
28
3
gestione del progetto
Minos
7. 1. 1 Ambiti di responsabilità del capo
7. 1. 2 Compiti del capo
7. 1. 3 Richieste personali al capo
7. 1. 4 Competenze necessarie del capo
7. 2 Il team del progetto
8. Programmazione del progetto
8. 1 Programmazione degli obiettivi
8. 2 Aspetti della programmazione
8. 3 Strutturazione di progetti
8. 4 Tipi di strutturazioni del progetto
8. 5 Tecniche della programmazione del progetto e strumenti
8. 6 Tecnica di programmazione in forma di rete
8. 6. 1 Scopi della programmazione reticolare
8. 6. 2 Storia della programmazione reticolare
8. 6. 3 Parole centrali della programmazione reticolare
8. 6. 4 Altri concetti della programmazione reticolare
8. 6. 5 Esempi della programmazione reticolare
8. 6. 6 Tipi di programmazioni in rete
8. 6. 7 Vantaggi della programmazione reticolare
8. 6. 8 Svantaggi della programmazione reticolare
8. 7 Pietre miliari
9. Passi verso il successo
10. Management del rischio
§
4
28
29
29
30
31
31
31
33
33
34
34
36
36
37
38
40
41
42
43
44
45
46
48
gestione del progetto
1
Il lavoro in un progetto oggigiorno
1.1
Il lavoro in un progetto nel passato
Minos
Quando si parla della costruzione di tempi antichi, della scoperta di continenti sconosciuti, o dello sviluppo di strategie e tecnologie innovative - si
tratta sempre di progetti coraggiosi, di cervelli che ottenevano un risultato
in un certo arco di tempo avendo a disposizione risorse limitate.
Non senza motivo nell’ambito militare si trova una precisa strutturazione
di processi per raggiungere uno scopo. Lo spostamento di materiale, delle
X
I compiti, metodi, strumenti e livelli del management del progetto in generale sono conosciuti e documentati. Dovrebbe essere un obiettivo però,
elaborare e far conoscere una terminologia unica e di promuoverla. Tale
obiettivo è quello degli istituti di normalizzazione e di associazioni PM.
È da ricordare specialmente il Project Management Institute negli USA
(PMI) che con il suo PMBOK (Project Management Body of Knowledge)
ha pubblicato il libro standard in lingua inglese per il management del
progetto. Numerose delle seguenti informazioni, sono state tratte dal
PMBOK, visto che con la sua rappresentazione molto strutturata informa bene sulle particolarità di progetti e del management di progetti. Per
informazioni che riguardano la Germania vengono usati soprattutto le
[[­^[;[_
Come guida per il management di qualità in progetti è stata pubblicata
la norma ISO 10006:2003.
1.2
Fases del desarrollo de la dirección de proyectos
Le grandi fasi dello sviluppo del management del progetto sono tre:
- la fase del management del progetto non consapevole
"XX\
- la fase della programmazione consapevole di progetti particolari
"
X^[¶
\
- la fase della programmazione dettagliata dei progetti, management
organizzato di progetti, dal 1980.
5
gestione del progetto
Minos
Esempio:
Già le legioni dell’Impero Romano, per quanto riguarda l’organizzazione
e l’abilità superavano i suoi avversari e così potevano vincere un gran
numero di battaglie.
Durante le battaglie l’utilizzo mirato e ben studiato delle forze, aiutava a
superare anche un numero più alto di avversari. La battaglia di Alessia, 52
avanti Cr. , nella quale Gaius Iulius Caesar resisteva con soltanto 50. 000
persone a 320. 000 combattenti e dalla quale usciva vincente, è soltanto
un esempio per le possibilità che può offrire il giusto impiego dei mezzi.
Il 5 dicembre del 1757 Federico il Grande vinse la forza armata tre volte
più grande degli austriaci. Questa vincita non fu resa possibile grazie
al numero maggiore di combattenti, ma grazie all’ ottimo impiego delle
forze a disposizione.
1.3
Origine di principi per l’organizzazione del progetto
Importante:
Come primo libro per la programmazione di operazioni complesse
nell’ambito militare dell’età moderna, può essere valutata l’opera “Dalla
Î
;^$
''
|
Oggigiorno quasi tutte le idee nell’ambito dell’economia, dell’amministrazione
pubblica, della ricerca, della politica e della formazione vengono realizzate
sotto forma di progetti. Anche compiti più piccoli nell’interno delle aziende vengono realizzati da gruppi responsabili per i progetti. Soprattutto
problemi complessi interculturali possono essere risolti nel miglior modo,
con il metodo del lavoro del progetto.
Il numero dei progetti negli anni passati è aumentato moltissimo. Il management del progetto però non fa miracoli. È un attrezzo complesso che
$
prende vita prima di tutto nella testa. I punti deboli o i fattori di rischio nei
progetti sono costituiti spesso, dalle persone stesse.
Questo perché la conclusione di un progetto ed il suo relativo successo,
dipendono soprattutto dal responsabile del progetto e della sua competenza (sociale).
6
gestione del progetto
1.4
Minos
I nuovi campi del sapere del management del progetto
Il management del progetto ha da coprire sopratutto i seguenti campi di
lavoro o di sapere (secondo il Project Management Institute):
Management di integrazione:
Qui si coordinano i diversi elementi di un progetto. Questo viene facilitato
dall’osservanza di standard di management del progetto.
Management di contenuto e della mole (anche Scope Management):
Il management della cornice del progetto (anche management del contenuto e della mole) fa che gli obiettivi del progetto vengano raggiunti. Non
guarda però soltanto gli obiettivi riferiti a quelli originali, ma cerca anche di
integrare nuovi obiettivi nel progetto e di indurre programmazioni nuove.
Management di deadline:
}
tegrare tutti i gruppi. La pianta del progetto serve fra l’altro come mezzo
di comunicazione.
Management dei costi:
Favorisce l’adempimento del budget. Qui è da riprendere lo sviluppo delle
spese. Nel caso necessario sono da avviare contromisure.
Management di qualità:
X
zazione di processi del management del progetto, la documentazione
dei lavori e degli obiettivi raggiunti come anche un management delle
misure adatte.
Management del personale:
]$
$
X
nel progetto, ma anche allo sviluppo del gruppo.
Management della comunicazione:
_[tecipanti, è da considerare anche nel management dei cambiamenti
(change management).
Management del rischio:
rischio, misure preventive e concetti per emergenze. È di importanza
soprattutto nel caso di progetti complessi.
7
gestione del progetto
Minos
Management della fornitura:
Riguarda l’integrazione e la collaborazione con partner e fornitori.
Consiglio importante:
Gli ambiti del sapere si assomigliano, come gli equivalenti del manage&
del progetto (unicità del prodotto, limitazione del tempo, orientamento
stakeholder e modo di lavorare iterativo) con processi speciali (vedi management del progetto, gruppi di processi), che possono essere diversi
dai campi di sapere del management generale.
8
gestione del progetto
2
Un progetto – Condizioni e caratteristiche
2.1
DIN 69 901
,
Minos
Secondo la DIN 69901 un progetto è:
“Un’ attività prevista che in generale si contraddistingue per l’unicità
delle condizioni nel loro complesso. ”
È il successore della DIN 69900 “Netzplantechnik” che prima includeva
[^[[_
del management di progetti. Segue un piccolo riassunto:
Condizioni:
- Ci deve essere un obiettivo previsto.
­
- Un progetto deve essere limitato nel tempo, economicamente e limitato
per quanto riguarda il personale.
- Deve essere un progetto singolo e limitato di fronte ad altri progetti.
­
- Il compito da affrontare deve essere nuovo e unico.
- Sono incluse diverse discipline.
<
=
­
- Un progetto consiste in più attività collegate fra di loro, chiamate anche
task o processi.
I processi sono da svolgere per raggiungere un certo obiettivo o sottoobiettivi. Pertanto, essi vengono svolti secondo il loro ordine (e le priorità)
e con l’aiuto delle risorse a disposizione come persone o mezzi di lavoro,
&
9
gestione del progetto
Minos
Caratteristiche:
- limitazione del tempo
- indicazione dell’obiettivo (indicazione dei mezzi, di deadline, di
misurazione e obiettivi speciali)
- unico (non un lavoro di routine)
- strutturazione (fasi, passi parziali, processi/pacchetti di lavoro)
­
3
Tipi di progetti
Per scopi pratici spesso si dividono i progetti in:
- progetti d’investimento
- progetti di ricerca e di sviluppo
- progetti d’organizzazione
Questa divisione è vantaggiosa, perché per questi tipi di progetto si può
fare riferimento a diversi modelli di fasi di progetti standard già esistenti.
,
Un modello di una fase di un progetto standard è la rappresentazione standardizzata dello svolgimento del progetto, diviso in sezioni
temporali, che possono essere chiamate precisamente e che sono
una parte importante del risultato del progetto.
Un‘altra divisione possibile è:
- progetti legati ad un sistema di lavoro ( tipo di organizzazione)
p. es. : Introduzione di un sistema di management di qualità o di un
nuovo impianto EDV
- progetti legati ad un oggetto di lavoro (di tipo tecnico) p. es. : sviluppo
di un prototipo
- progetti legati al posto di lavoro (impianti di produzione, fabbrica) p.
es. : trasformazione di un sistema di immagazzinamento ad un sistema
totalmente automatico.
10
gestione del progetto
3.1
Minos
Progetti di investimento
I progetti di investimento si contraddistinguono per le somme elevate che
sono necessarie per comprare i prodotti.
,
Questi prodotti di solito possono essere usati per un lungo periodo
e vengono comprati normalmente soltanto una volta.
Ambiti tipici per progetti di investimento sono pertanto immobili, grandi
impianti tecnici e tutte le costruzioni speciali con un grande riferimento al
cliente. I progetti di investimento, a causa della loro grandezza e della loro
importanza economica per l’impresa, vanno programmati e realizzati con
grande cautela. Al contrario, per i progetti di ricerca e di sviluppo, presso
i quali il gruppo del progetto decide soltanto di variazioni di proposte,
si tratta sempre di soluzioni d’acquisto. Un cambiamento dell’ oggetto
di investimento non è previsto. I progetti di investimento richiedono un
team esteso.
3.2
Proyectos de investigación y de desarrollo
I progetti di ricerca e di sviluppo rappresentano la forma di programmazione e di comando più complessa del management del progetto.
,
Un progetto di ricerca e di sviluppo è caratterizzato dallo sviluppo
di un nuovo procedimento, un nuovo sistema o un nuovo utilizzo
di un oggetto.
In questo caso è prevista la realizzazione dell’oggetto come prodotto
industriale, come procedimento, come software o come struttura. I progetti di ricerca o di sviluppo, molto spesso vengono svolti negli ambiti di
ricerca e di sviluppo delle imprese. Nell’industria ne possono far parte la
costruzione di nuove macchine come anche lo sviluppo di nuovi materiali
per costruzioni.
Specialmente negli istituti specializzati della ricerca applicata (in Germania
negli Istituti Fraunhofer) spesso con un collaboratore, vengono realizzati
più progetti di ricerca o di sviluppo. In questo caso, un collaboratore in
diversi progetti può avere svariati ruoli. Specialmente nel caso di progetti di ricerca e di sviluppo è importante una votazione regolare sullo
svolgimento del progetto.
Visto che l’interno team del progetto (vedi capitolo 7, “Team del progetto”),
sfrutta i risultati di altri partecipanti al progetto, le decisioni importanti
vanno prese con l’intero team. Un cambiamento di indirizzo è possibile
ma molto dispendioso
11
gestione del progetto
Minos
3.3
Progetti di organizzazione
I progetti di organizzazione sono i progetti più numerosi.
,
I progetti organizzativi sono progettati per essere svolti in una struttura, con lo scopo di guidare le risorse per un certo arco di tempo.
Le risorse usate durante l’arco di tempo del progetto, vengono tolte alla
struttura dell’organizzazione esistente. I progetti di organizzazione si
dedicano ad attività concrete di persone. Dunque, si può trattare della
$
palazzo ad un altro. I progetti di organizzazione di solito possono essere
ben programmati .
Al contrario dei progetti di ricerca e di sviluppo, in quelli di organizzazione
c’è un bisogno di coordinazione sin dall’inizio del progetto. Se agli albori
del progetto stesso, si riesce a programmare bene (vedi capitolo 5, “Un
progetto e le sue fasi”), durante lo svolgimento basta chiarire lo stato del
progetto poche volte.
Questi incontri servono per far conoscere lo stato della realizzazione e
£
Nei progetti d’organizzazione il fattore economico spesso non è il punto
debole, perché prima del progetto ci sono già offerte e promesse vincolanti
sulle spese necessarie.
Importante
Importante è l’integrazione della direzione se si tratta di progetti che
si svolgono includendo diversi o tutti i reparti della ditta.
Tramite l’integrazione spesso vanno evitati problemi di votazione fra diverse istituzioni e ambiti. Nel team del progetto perciò, andrebbero incluse
persone di tutti gli ambiti e tutte le istituzioni che hanno la competenza
di decidere anche se queste persone poi non sono responsabili per la
realizzazione operativa del progetto.
12
gestione del progetto
3.4
Minos
Pianta della struttura del progetto
La programmazione di un progetto è una parte fondamentale per il suo
successo. Spesso lavoratori degli ambiti più diversi, si incontrano per la
prima volta nel team del progetto e contemporaneamente dispongono
di poca esperienza per quanto riguarda lo svolgimento di un progetto.
%&
progetto. Certe fasi del progetto possono dipendere da altre fasi che si
svolgono prima. In questo caso la chiusura della prima sezione rimanda
l’ultimazione della sezione seguente (vedi capitolo 8, “Programmazione
del progetto”).
Immagine 1: Pianta della struttura del progetto
3.5
Particolarità nel management di progetti internazionali
3.5.1
Obiettivi di una internazionalizzazione
Quando un’impresa decide di fare il passo all’estero e dunque di allargare la produzione oltre le frontiere del proprio paese, avere obiettivi
ben precisi, è decisivo. Gli obiettivi di internazionalizzazione – come gli
obiettivi dell’impresa in generale - possono essere soltanto la base di
una valutazione del successo delle attività internazionali quando esse
divengono operative, per quanto riguarda:
- il content (che cosa c’è da raggiungere con il lavoro all’estero?)
- la mole (Quanto è desiderato?),
- integrazione temporale (in quale momento è da raggiungere
l’obiettivo?),
- riferimento al segmento (in quali gruppi di paesi va raggiunto l’obiettivo,
\
13
Minos
3.5.2
gestione del progetto
Tipi di obiettivi di internazionalizzazione
X gruppi. I criteri possono essere presupposti come segue:
- la suddivisone in obiettivi economici e non come
- divisione di obiettivi in quelli di origine difensiva o oggettiva e
- la delimitazione fra scopi di internazionalizzazione orientate alle risorse,
alla produzione e al mercato.
3.5.2.1 Scopi economici e non economici di un’ internazionalizzazione
~
$$
che tramite la vendita all’estero si cerca di compensare effetti negativi di
cicli di congiuntura nel proprio paese. Le seguenti attività si basano su
{
- export all’estero, se la produzione nella propria nazione è a buon
mercato.
- Spostare la produzione in paesi dove si produce a prezzo più basso
- Produzione di serie più alte tramite vendita all’estero, seguono effetti
di regressione nella produzione, riduzione del prezzo possibile.
- Assorbimento del residuo del consumatore nei paesi in cui il prodotto
è una innovazione.
- Stabilizzazione del volume d’affari totale attraverso la fornitura di più
mercati che non sono sottoposti agli stessi cicli di congiuntura.
14
gestione del progetto
Minos
Altri obiettivi economici sono quelli dell’assicurazione e della crescita o
della partecipazione alla crescita dinamica di mercati all’estero, causati
dunque da un orientamento all’espansione degli affari.
Gli obiettivi orientati al successo dell’impresa si esprimono come
segue:
- Pericolo di perdita nella propria nazione, p. es. a causa della riduzione
imprevista della durata di vita del prodotto.
- Allargamento di posizioni del mercato già esistente all’estero tramite
un impegno più forte.
- Così si crea un compenso nei confronti della concorrenza che è res
ponsabile di una riduzione di mercato nella propria nazione.
- Il cliente principale segue all’estero.
Gli obiettivi orientati alla crescita si fanno vedere:
- nell’allargamento e prolungamento del ciclo di vita dei prodotti,
- nella partecipazione alla crescita dinamica di mercati all’estero,
- nel raggiungere obiettivi di crescita che p. es. a causa di obblighi
nella propria nazione non possono essere raggiunti.
Obiettivi importanti non economici dell’internazionalizzazione consistono
£
15
gestione del progetto
Minos
3.5.2.2 Obiettivi difensivi e offensivi dell’internazionalizzazione
Obiettivi difensivi
L’internazionalizzazione ha un carattere difensivo quando un’impresa, per
la stabilizzazione della sua posizione (in pericolo), nel mercato, si mette
a produrre all’estero o segue la concorrenza all’estero, per compensare
gli svantaggi della concorrenza.
Obiettivi offensivi
Obiettivi offensivi di internazionalizzazione sono invece perseguiti da
quelle imprese che vogliono sfruttare i vantaggi del mercato, p. es. vantaggi tecnologici, o quando ambiscono ad un prolungamento del ciclo di
vita dei loro prodotti.
3.5.2.3 Orientati alle risorse, alla produzione e alla vendita
Obiettivi di internazionalizzazione orientati alle risorse li troviamo nei
servizi di sicurezza di supporto della materia prima.
Abbiamo a che fare con aspetti orientati alla produzione, quando si parte
con l’idea che i processi di produzione all’estero si potrebbero svolgere
a prezzo più basso.
clienti principali all’estero.
16
gestione del progetto
Minos
!!>@
Nel dialogo fra diverse culture la comprensione delle differenze è una
base importante per lo svolgimento del progetto con successo. A questo
campo si avvicina l’ambito della sociologia (vedi anche il modulo MINOS
“Comportamento sociale, Competenze interculturali”).
,
La sociologia (parola d’arte che deriva dalla parola latina ‘socius’:
compagno e quella greca ‘lógos’: parola) descrive e analizza i collegamenti nella struttura, del funzionamento e dello sviluppo nella
società.
La conoscenza delle condizioni sociologiche è una componente importante integrativa per il management del progetto, così p. es. :
- la partenza di macchine e impianti
- compiti legati alla ricerca degli sbagli nel caso di emergenza
- la coordinazione di gruppi di progetti internazionali
- coordinare trattamenti
Accanto alle richieste professionali è necessaria anche un’alta misura
di tolleranza della frustrazione, cioè la capacità individuale di compensare delusioni o di rinunciare a bisogni, senza entrare in depressione o
diventare aggressivi.
Però il management di un progetto internazionale include anche la possibilità di un contorno sempre attuale e molto interessante.
Al problema del dialogo fra diverse culture si dedica il campo della ricerca
delle mentalità.
,
Il concetto della mentalità (lat. mens, mente) descrive modi predominanti di pensare o comportarsi in un gruppo di persone (p. es. di
un gruppo della popolazione o un gruppo professionale).
'
& $
realistico ecc. La percezione di questi modi di pensare attraverso persone
non incluse, spesso è la base per generalizzazioni che si esprimono in
clichè, pregiudizi e stereotipi. Dall’ altro lato il concetto di mentalità può
essere usato come base per descrivere un comportamento ‘normale’ in
gruppi sociali.
17
gestione del progetto
Minos
4
Programmazione e obiettivi del management del progetto
4.1
Management del progetto operativo
,
Il management operativo è il management classico che è riferito al
progetto e al suo svolgimento.
La programmazione e gli obiettivi sono uguali ad altri compiti e processi
nella ditta. Normalmente nell’ambito del management operativo del progetto, vengono realizzati tre tipi di progetti (progetto di in vestizione, di
organizzazione e di ricerca).
4.2
Management tattico del progetto
Al contrario del management operativo, gli iniziatori del management
tattico sono da trovare nel management medio.
,
Il management tattico dunque favorisce cambiamenti sul livello
dei reparti e non si dedica soltanto alla realizzazione di obiettivi
operativi della ditta.
Nel centro può starvi dunque, l’uso di un nuovo EDV in un ambito della
ditta, la fusione di due reparti o la ristrutturazione dell’organizzazione
della ditta.
4.3
Management strategico del progetto
Il management strategico del progetto rappresenta uno strumento im
,
Il management strategico del progetto è un anello di congiunzione
fra obiettivi strategici della ditta e il management operativo del progetto. Il management strategico crea così la cornice in cui un grande
J'
K
Scopo del management strategico è il superamento della mancanza di
organizzazione convenzionale e gerarchica tramite un avvicinamento
sistematico p. es. :
- la reazione su problemi non organizzativi,
- decisioni e
­£
18
gestione del progetto
5
Minos
Un progetto e le sue fasi
I progetti spesso vengono suddivisi in fasi, che sottolineano il modo iterativo di procedere nel management. Normalmente le fasi del progetto
$
,
'
'
<W
con una deadline. Se gli obiettivi parziali non sono stati raggiunti
in tempo o i risultati contengono errori secondo il programma, la
'
ZK
stati risolti.
Le pietre miliari dunque, sono uno strumento molto importante durante
la programmazione del progetto. Un uso esagerato di pietre miliari può
disturbare lo svolgimento del progetto a causa della grande necessità di
consultazioni. Poche pietre miliari, invece, portano all’errore non percepito. Piani di progetti on-line, cioè piani di progetti in cui ogni giorno può
essere controllato lo stato dei lavori dei singoli partecipanti per la guida
$>
$
%
$
{
,
Una fase del progetto è una sezione temporale di un percorso del
progetto, che per il suo contenuto può essere separato da altre
sezioni.
- idea del progetto e inizio
­
- ricerca sulla realizzabilità
- Incarico e Kick Off
­
­
- programmazione del progetto
- sorveglianza del progetto
- valutazione del progetto
19
gestione del progetto
Minos
In seguito vengono meglio spiegate le singole fasi del progetto. Non tutti
i progetti devono contenere tutte le fasi. Anche l’impronta delle singole
fasi varia tra un progetto e un altro. La strutturazione delle fasi dunque è
da intendere come direttiva che nella sua successione non può essere
cambiata, però può esserlo nella sua impronta. La piena elaborazione di
tutte le fasi però, è il modo più sicuro per svolgere il progetto.
È importante che la programmazione del progetto vada svolta da parte
della guida del progetto. Nelle singole fasi, p. es. durante la programmazione di deadline, vanno integrati tutti i partecipanti nel progetto.
Specialmente il management del rischio, rappresenta uno strumento per
la prevenzione degli errori.
5.1
Idea del progetto ed inizio
Importante
+[K'
Importante
5.3
Il progetto viene fatto partire con un’idea, un problema, una richiesta o
in seguito alla necessità di realizzare un progetto più grande. Anche in
questa fase hanno luogo dibattiti sul senso e sull’utilità. I primi contatti
con futuri partner nel progetto e responsabili nascono in questo frangente.
$
costi, gli deadline ed eventualmente obiettivi speciali. Nasce un program
così precisa, che è possibile fare un elenco di compiti e risorse necessarie
"
\]
Ricerca sulla realizzabilità
Importante
Specialmente se si tratta di progetti più grandi, è importante chiarire prima
realizzabile. L’impresa può dare l’ incarico di uno studio sulla realizzabilità
o potrebbe fare una inchiesta fra esperti e capire così che cosa potrebbe
funzionare e che cosa no.
Questa fase è molto importante perché in questo momento ancora ini&
£
X
per raggiungere lo scopo.
20
gestione del progetto
5.4
Incarico e Kick Off
Importante
Il committente ora dà l’incarico. Poi la ditta nomina la guida del progetto
e stabilisce che fa parte del team. Nel cosiddetto Kick off tutte le informazioni che riguardano il progetto vengono date al gruppo. Tutte le persone
incluse, elaborano una strategia vincolante.
]
Importante
^
Minos
l’intero progetto viene ora suddiviso in singoli passi. A secondo della
grandezza del progetto si tratta di progetti parziali o di processi raccolti.
X
X
razione, la guida del progetto deve prestare attenzione che non ci siano
interferenze per quanto riguarda il personale o i contenuti.
]
Importante
I processi raccolti in questa fase vengono suddivisi in singole unità di
lavoro, i cosiddetti processi. Se questa suddivisione va fatta più dettagliata
o meno dipende dal tipo del progetto, dai collaboratori e dalle possibilità
di controllo durante lo svolgimento del progetto.
La programmazione del percorso e degli deadline fornisce dunque la
schedulazione per lo svolgimento del progetto. Inoltre la programmazione
del percorso e degli deadline con le informazioni incluse fornisce la base
decisiva per altre programmazioni e possibili risposte su tante domande
durante la valutazione del progetto. Alcune di esse sono:
- A quali punti del progetto ci sono delle libertà nel percorso tecnico o
insicurezze e quali conseguenze ne potrebbero nascere?
- Dove e in quale misura ci sono delle incertezze di tempo che
potrebbero avere conseguenze, e quali?
- Quali avvenimenti importanti (le cosiddette pietre miliari) sono da
rispettare durante lo svolgimento del progetto a fronte di quali obblighi
temporali?
­#
"\
ne sono da dedurre?
- Quando e in quale misura vanno messe a disposizione delle risorse
(come p. es. personale, macchine, attrezzi, impianti ecc. ) per poter
21
gestione del progetto
Minos
Il piano con gli deadline è la direttiva più importante per gli impiegati
nel progetto. Contemporaneamente serve per valutare il progresso nel
progetto durante lo svolgimento.
5.7
Programmazione del progetto
Importante
$
lavoro.
_'
- Così p. es. il processo numero quattro si può svolgere soltanto quan
$
impatta sui seguenti aspetti:
- Durata temporale per ogni passo
_
- risorse necessarie (personale e mezzi produttivi)
_ Programmazione delle risorse
- I costi che ne risultano.
_ Programmazione dei costi
- In questa fase della programmazione possono nascere i seguenti
£
{
- Coincidenze di deadline
- Mancanza di risorse a causa dell’assegnazione doppia di compiti
Il responsabile per la programmazione del progetto, dovrebbe prevedere tempi di riserva per possibili problemi imprevisti. Un risultato della
programmazione del progetto potrebbe essere anche l’adattamento o la
variazione degli obiettivi se le conoscenze da parte della “programmazione” lo rendono necessario.
22
gestione del progetto
5.8
Sorveglianza del progetto
Importante
5.9
Minos
Dopo l’inizio della realizzazione, il compito della guida del progetto è
sorvegliarne il progresso. Nel caso di imprevisti o cambiamenti di costi,
la guida deve rielaborare il programma del progetto. Regolarmente hanno luogo e votazioni. La guida del progetto dopo archi di tempo stabiliti,
$
£ $
$
del progetto.
Valutazione del progetto
#
un esame completo del progetto secondo i seguenti aspetti:
- Sono stati raggiunti gli obiettivi (la cosa, la durata e i costi)?
- Quanto forti erano le deroghe dal programma del progetto?
- La programmazione era troppo ottimistica?
- Lo svolgimento era ottimo?
­
£
- Come si è svolta la comunicazione nel gruppo e con il committente?
- Come era il clima di lavoro?
- La documentazione del progetto come base di esperienze è utile?
5.10
Management del progetto in gruppi
Se si separa i processi del management del progetto dalle sue fasi, i
processi del management possono essere descritti in gruppi:
Possono essere formati i seguenti gruppi di processi:
- Gruppo iniziale
- Gruppo di programmazione
- Gruppo di svolgimento
- Gruppo di comando
- Gruppo di conclusione
23
gestione del progetto
Minos
5.10.1 Gruppo di star-up
,
Nel gruppo responsabile per l’start up questo processo è al centro
dell’attenzione. Viene eseguito all’inizio del progetto e poi all’inizio di
ogni fase del progetto.
Importante
Obiettivi importanti dell’start up sono:
- Diffusione delle informazioni necessarie per poter lavorare in maniera
$
­$
X
$X"
\
perciò vengono chiariti gli obiettivi e il modo di lavoro in ogni fase del
progetto.
- L’informazione relativa al progetto viene cambiata e adattata allo
strakeholders.
- Il progetto o la prossima fase del progetto viene considerata in tutte
le sue parti (non dettagli) e collegamenti.
- Dovrebbe essere raggiunta un’armonia di tutti i partecipanti per quanto
riguarda tutte le questioni.
Come in tutti i gruppi i processi si ripetono e interagiscono fra di loro. La
5.10.2 Gruppo di Programmazione
,
La programmazione include tutti i passi per la programmazione del
progetto o quelli per una fase. Eventualmente si approva o si scelgono
alternative. I processi più importanti del management del progetto nel
gruppo ‘Programmazione’ sono:
- Programmazione di contenuto e mole
­
­
- Fissare le conseguenze dei processi
- Programmazione dei mezzi
- Stimare la durata dei processi
- Stimare i costi
- Programmazione del management del rischio
- Sviluppare il piano con deadline
- Programmazione dei costi
- Mettere insieme il programma del progetto
Inoltre ci sono processi ausiliari, come la programmazione di qualità,
programmazione della fornitura, ecc.
24
gestione del progetto
Minos
5.10.3 Gruppo Realizzazione
,
# K risorse e la loro attribuzione ai processi nel piano del progetto, per
poter raggiungere l’obiettivo del progetto. Ne fanno parte processi
come lo svincolo del pacchetto di lavoro. La realizzazione viene
sostenuta da processi ausiliari, come l’assicurazione di qualità, il sistema d’informazione, lo sviluppo del gruppo o la scelta dei fornitori.
5.10.4 Gruppo comando
,
Questo gruppo si dedica alla continua sorveglianza del raggiungimento dell’obiettivo nel progetto. Nel PMBOK viene usata la parola
“control processes”. Nel gruppo ‘comando’ ci sono due processi
principali:
- informazione, per la raccolta e la distribuzione (orientazione
¡\$
- il comando integrato di cambiamenti, per coordinare i cambiamenti
I processi principali vengono sostenuti da un grande numero di processi
ausiliari, ne fanno parte processi di collaudo, manutenzione programmata
e analisi dei costi e monitoraggio del rischio.
/ ,
>
amministrativa del progetto.
Nel primo caso è importante fare attenzione che tutti i contratti venga $
Learned Workshop e – secondo PMI molto importante – la compilazione
della banca dati con “dati storici del progetto”, per mettere a disposizione
il sapere ottenuto anche per progetti (e manager) futuri.
25
gestione del progetto
Minos
6
Organizzazione del progetto
La scelta dei responsabili per il progetto e dei membri del progetto è
importante per il successo del progetto. Ci vuole anche decisione sulla
forma d’organizzazione del progetto.
Le seguenti forme dell’organizzazione sono:
6.1
Organizzazione vera e propria del progetto
,
Questa forma di organizzazione spesso viene usata se si tratta di progetti molto grandi. Il team del progetto viene messo insieme dai reparti
di organizzazione della linea. Questi collaboratori sono sottoposti alla
guida del progetto. Questi ha il pieno potere di decidere e la piena responsabilità per il progetto.
Vantaggi:
La guida del progetto ha tutte le competenze. Perciò la responsabilità
&
$
£
$
cano fortemente con il progetto. Una conseguenza è la forte motivazione.
Svantaggi:
Durante la scelta dei membri del progetto la guida dipende dalla volontà
di cooperazione dell’organizzazione della linea. di produzione. Devono
la reintegrazione dei collaboratori al progetto nell’organizzazione della
#
{|­|
problemi a reintegrarsi nell’organizzazione della linea. Inoltre c’è il pericolo
che il team rimanga isolato e che ci sia una mancanza di collaborazione
con i reparti.
direzione
dell‘impresa
acquisto
produzione
distribuzione
amministrazione
progetto
A
@
26
progetto
B
gestione del progetto
6.2
Minos
Coordinazione del progetto
,
La struttura funzionale dell’organizzazione rimane invariata con questo
approccio. Si aggiunge soltanto un coordinatore del progetto. Il coordinatore però ha soltanto una funzione di consigliere.
Vantaggi:
~ £
X collaboratori possono essere utili in più progetti contemporaneamente. Lo
scambio di informazioni ed esperienze funziona in maniera relativamente
semplice. Spesso i cambiamenti non sono necessari nell’organizzazione.
Svantaggi:
Nessuno si sente responsabile dell’intero progetto. Il tempo di reazione
'
$X
che interessano trasversalmente più reparti perché nessuno si sente
responsabile.
direzione
dell‘impresa
progetto A
acquisto
produzione
progetto B
distribuzione
amministrazione
Immagine 3: Coordinamento del progetto
27
gestione del progetto
Minos
6.3
Organizzazione in forma di matrice
,
Questa forma è un’interazione fra l’organizzazione pura e la coordinazione del progetto della linea d’organizzazione. È chiaro che la responsabilità viene divisa fra la guida del progetto e il capo del reparto. Così la
guida del progetto ha la piena responsabilità per il progetto stesso, ma
non il pieno diritto di impartire ordini ai collaboratori. Questi rimangono
nei loro reparti dell’ …. (Linienorganisation-) e vengono integrati nel progetto soltanto momentaneamente.
Vantaggi:
£
%&
&
guenza è un effetto di sinergia visto che collaborano addetti di diversi
reparti. Inoltre c’è una sicurezza più grande per i collaboratori, visto che
#
doversi integrare di nuovo nel loro reparto. La responsabilità viene suddivisa secondo la responsabilità per il progetto e quella per la qualità.
Svantaggi:
'£$X
%
riferimento ai compiti del progetto da risolvere ed ai lavori ordinari. I col
£
al responsabile della linea e quindi si sentono responsabili di mansioni
ordinarie, . dall’altro sono integrati nell’organizzazione del progetto. I
processi del progetto dunque vanno svolti in un arco di tempo limitato.
direzione
dell‘impresa
produzione
progetto B
progetto A
sistema decisionale basato su funzioni
@
28
distribuzione
sistema decisionale basato su
un progetto
acquisto
gestione del progetto
6.4
Minos
Conclusione: Caratteristiche dell’organizzazione di un progetto
Importante
Diverse caratteristiche sono tipiche dell’organizzazione del progetto:
- La durata dell’organizzazione è limitata sulla durata del progetto.
- Membri del team responsabile per il progetto vengono
(parzialmente) liberati da altri compiti.
- La posizione nella gerarchia del team del progetto non dipende
dalla posizione nella ditta.
- La costituzione qualitativa e quantitativa del gruppo può cambiare.
29
gestione del progetto
Minos
7
Guida del progetto
7.1
La guida del progetto
7.1.1
,
Ambiti di responsabilità e compiti della guida del progetto: Il capo è una
persona nominata dal committente (p. es. amministrazione, committente
esterno) per l’intera durata del progetto, ed ha numerose responsabilità.
I compiti e le competenze dipendono sempre dal progetto, dalla struttura
della ditta o dal committente. Il seguente conteggio parte da una organizzazione del progetto in forma di matrice nella quale il capo ha soltanto
una competenza professionale.
Ambiti di responsabilità della guida del progetto
L’ambito di responsabilità della guida del progetto include:
- sorveglianza di costi e budget
­
- raggiungere l’ obiettivo (riferito alla cosa)
­£
- la responsabilità professionale e obiettiva per il team del progetto
- la guida delle attività del progetto
- rispettare le direttive, indicazioni su procedimenti e lavori
- la comunicazione nel team e con il committente
- preparazione, discussioni sul progetto e
- mettere a disposizione e attualizzare la pianta del progetto.
30
gestione del progetto
7.1.2
Minos
Compiti della guida del progetto
Fanno parte dei compiti della guida del progetto:
- - indicare un rappresentante per la coordinazione del gruppo
- la collaborazione durante la costituzione del team
- la divisione dei compiti nel gruppo
- la sorveglianza dei progressi nel progetto
­
- un continuo controllo dei costi e deadline
- la rappresentazione del progetto fuori della ditta
- organizzare la votazione necessaria nell’interno e nell’esterno
- la responsabilità di corsi di formazione necessari
- se necessario ricorso all’istanza di decisione
- redigere informazioni sullo stato del progetto
- la documentazione del progetto e gestione di atti
- il calcolo dopo la chiusura del progetto.
7.1.3
Requisitos personales del director del proyecto
Richieste personali alla guida del progetto
I compiti e responsabilità si basano su un gran numero di capacità della
guida del progetto che questo nel caso ideale dovrebbe avere:
- competenza professionale
- competenza di guida
- competenza sociale
- capacità di comunicazione
- capacità di motivazione
- capacità di delegare
31
gestione del progetto
Minos
- capacità di cooperazione
- riconoscere collegamenti
- talento di organizzazione
­X
$
- iniziativa propria
- creatività
- voglia di decidere
- capacità di trattare
- capacità d’imporsi
- dinamicità
7.1.4
Competenza minima della guida del progetto
Importante
Visto che il successo del progetto dipende in gran misura dalla personalità
della guida del progetto, la ditta dovrebbe sceglierla bene. Per evitare
equivoci va stabilito se la guida del progetto opera soltanto in via professionale o ha anche il potere di decidere per via disciplinare.
Competenze minime:
Per uno svolgimento del progetto senza problemi, la guida del progetto,
però, deve avere almeno le seguenti competenze:
­%&
- Ottiene la possibilità di votare per la scelta dei responsabili.
- Ha il diritto di informare e di decidere.
- Può delegare compiti per l’ elaborazione.
32
gestione del progetto
7.2
Minos
Il team del progetto
Il team che lavora in un progetto normalmente è disposto da:
- la guida del progetto
­
- membri variabili
- persone o ditte che lavorano per il progetto (servizi).
Inoltre, si parla di gruppi di progetti aperti o chiusi. Nel caso di un gruppo
$no parte del progetto. Nel caso di team aperto, i collaboratori cambiano
secondo lo stato del progetto. P. es. la collaborazione di programmatori
nel gruppo può essere necessaria soltanto in una certa fase.
33
gestione del progetto
Minos
8
Programmazione del progetto
,
8.1
Per programmazione del progetto si intende la produzione sistematica di
informazioni sul percorso futuro del progetto e l’anticipazione del lavoro
necessario. Una mansione di successo nel progetto si basa sulla pro'¬{'$
durante la programmazione, programma il proprio fallimento. ” Il piano
basi del controllo e supervisione del progetto riconoscendo le differenze
e introducendo le misure di correzione.
Planeación del objetivo
,
La programmazione dell’obiettivo include il percorso che va dalla con ¬
obiettivi vanno dedotti dalle richieste di mercato misurandone gli effetti in
questo ambito. (analisi dell’ambito del progetto e stakeholder (stakeholder:
partecipanti, interessati). Soltanto quando c’é una visione chiara della
¬
obiettivi di tutte le attività del progetto sono regolati da norme.
A loro possono essere attributi quattro funzioni basilari:
1.
funzione di orientamento
2.
funzione di selezione
3.
funzione di coordinazione
4.
funzione di controllo
Gli obiettivi del progetto consistono di tre componenti:
1.
2.
3.
resa
data di conclusione del progetto
costi del progetto
Le tre componenti stanno in un rapporto di concorrenza fra di loro e
perciò vanno visti in un collegamento. Questo collegamento si lascia
rappresentare in un triangolo ‘magico’.
34
gestione del progetto
Minos
attività
progetto
costo del
progetto
Immagine 5: Tre poli del management del progetto
Gli obiettivi si riferiscono al contenuto del progetto ed al suo percorso:
_`K'
%K'&
_ Obiettivi riferiti al percorso del progetto (obiettivi del
processo)
Normalmente è utile una separazione in obiettivi necessari e obiettivi
desiderati.
Obiettivo necessario:
È impensabile non raggiungerlo!
Obiettivo desiderato:
Nice to have!
I gruppi di obiettivi vengono descritti in un catalogo opportuno. All’inizio
del progetto non possono sempre essere nominati in tutti i dettagli. Soltanto durante il percorso del progetto, quando ci sono già dei risultati, gli
obiettivi possono e devono essere chiari.
Importante
Le richieste più importanti all’espressione di un obiettivo sono:
- L’espressione di un obiettivo dovrebbe svolgersi indipendentemente
dalla soluzione.
- Gli obiettivi dovrebbero essere misurabili.
35
gestione del progetto
Minos
8.2
Aspetti della programmazione
%
$
$
#
però, nel caso di progetti nuovi, è possibile soltanto in maniera limitata.
Il pericolo di fare sbagli è grande. Un procedimento molto approfondito
perciò è necessario. Si consiglia di rispettare i seguenti aspetti:
­
"\
- Prepari documenti in cui il progetto viene analizzato in maniera
dettagliata
- Programmi in maniera dinamica (aggiornamenti continui, di
documenti cambiamenti, risultati ecc. )
8.3
Arreglos de los proyectos
Ci sono due possibilità di strutturare progetti:
Il metodo Top-Down e il metodo Bottom-Up. Secondo il tipo del progetto
utilizzare una delle due tecniche.
Metodo-Top-Down
,
]
(Top=sopra).
­
"|­
\
il progettista crea per prima cosa l’arrangiamento che successivamente
verra riempito con le procedure.
Metodo Bottom-Up
36
, Questo metodo funziona all’incontrario, cioè da giù in su. È adatto quando
tutti o quasi tutti i processi singoli sono conosciuti in forma di un elenco
sottoposto. In questo caso il responsabile deve soltanto cercare una
struttura di per lo svolgimento dei processi. La struttura nasce dai singoli
processi esistenti.
Spesso sono necessari arrangiamenti ausiliari p. es. secondo reparti,
costi o tipi di prodotti.
gestione del progetto
Minos
progetto
subprogetto
1.1
progetto
parte 2
subprogetto
1.2
subprogetto
2.1
subprogetto
2.2
fase di lavoro
1.1.1
fase di lavoro
2.1.1
fase di lavoro
1.1.2
fase di lavoro
2.1.2
fase di lavoro
1.1.3
fase di lavoro
2.1.3
strategia „Bottom-up“
strategia „Top-Down“
progetto
parte 1
Immagine 6: Le strategie Top-Down e Bottom-Up
8.4
Piani di progetti
I seguenti piani sono necessari e devono essere documentati in un
piano del progetto:
Piano della struttura (piano delle fasi e della struttura del progetto)
Ò Come è strutturato il progetto?
Piano delle date e del percorso
Ò Come si deve svolgere il progetto?
Ò Quali deadline valgono per il progetto?
Piano dei mezzi usati:
Ò Quali risorse sono necessarie?
Piano dei costi
Ò Quali costi sono previsti?
Piano della programmazione
Ò'
37
gestione del progetto
Minos
8.5
Tecniche e strumenti per la programmazione del progetto
I metodi più usati per programmare il progetto:
,
Il piano della struttura del progetto (strutturazione): Una strutturazione
utile del progetto, cioè la strutturazione in sottoprogetti, processi raccolti
(Sammelprozesse) e processi singoli, è la base per una programmazione
trasparente del progetto e la sua sorveglianza. Lo strumento più utile è il
piano della struttura del progetto (PSP). In inglese questo procedimento
viene chiamato Work Breakdown Structure (WBS). Ci sono piani orientati all’oggetto, alla funzione e quelle orientate sia all’oggetto sia alla
funzione (vedi immagine). Con un PSP orientato all’oggetto è intesa la
programmazione sulla base di soluzioni, con “orientamento alla funzione”
la programmazione sulla base di processi.
Durante la costruzione di una casa il progettista chiamerebbe la fase
“scavare i fondamenti” nel PSP orientato all’oggetto “fondamento”, nel
PSP orientato alla funzione “gettare le fondamenta”.
creazione di un
000
creazione di costruzione grezza
100
muraglia
creazione di installazione
prime
200
linea elettrica
impermeabilizzazione
conduttura
dell‘acqua
basamento
Immagine 7: PSP orientato all’oggetto
38
creazione di lavoro del
falegname
300
telaio della
costruzione del
tetto
gestione del progetto
Minos
creazione di un
000
progettazione
100
realizzazione
200
attivazione
300
attuazione
201
collaudo
301
cazione
102
procacciamento
202
test di funzionamento
302
licenza edilizia
103
monitoraggio
203
inizio d‘uso
303
realizzazione
104
detrazione
204
indagine
101
&
creazione di un
000
creazione di
costruzione grezza
100
creazione di installazione
prime
200
creazione di lavoro del
falegname
300
progettazione
101
progettazione
201
progettazione
301
realizzazione
102
procacciamento
202
procacciamento
302
monitoraggio
103
realizzazione
203
detrazione
104
installazione
204
collaudo
105
test di funzionamento
205
installazione
303
collaudo
304
Immagine 9: Pianta della struttura del progetto orientata all’oggetto e
39
gestione del progetto
Minos
8.6
Tecnica di programmazione
,
Il concetto della tecnica di programmazione reticolare include “tutti i
i mezzi e risorse e altre misure” (DIN69900, parte 1). Un piano di rete
“è la rappresentazione di processi o dipendenze in forma di tabella o di
Î"[[;\
La tecnica “network” serve soprattutto per programmare progetti, dunque
nell’ambito del management del progetto è un metodo di programmazione.
8.6.1
Obiettivi della tecnica di programmazione reticolare
,
Obiettivo della programmazione reticolare è la programmazione dei rapporti logici fra i processi e la situazione temporale di queste procedure,
come base degli accordi dell’ obiettivo e per la mediazione di orientamento
all’azione nel progetto. Il piano in rete fornisce la base per la messa a
disposizione di strumenti di comunicazione, come p. es. pietre miliari,
“bar charts o net bar charts”.
L’uso della tecnica di programmazione reticolare deve portare alla risposta
di quattro domande importanti:
- Quanto durerà tutto il progetto?
­#
- Quali attività critiche del progetto possono prolungare la durata del
­
X>
­]
$
la velocità con costi bassi?
Importante
40
La tecnica della programmazione reticolare si basa sull’esperienza che
le attività che formano il ramo di rete più lungo decidono lo sviluppo del
progetto. Se queste attività critiche vengono riconosciute presto, possono
essere effettuate anche contromisure. Il management si può concentrare
sulle attività critiche. Attività non critiche possono essere programmate
£
gestione del progetto
Importante
Minos
La tecnica della rete rappresenta un mezzo che serve soprattutto
per i seguenti obiettivi:
- Le connessioni logiche di un progetto possono essere rappresentate
- Per tutti i processi del progetto con l’aiuto della tecnica della pro
grammazione reticolare, può essere sviluppato un piano del tempo.
- Il percorso critico e le risorse che potrebbero mettere in pericolo
la chiusura del progetto nei tempi previsti devono essere facilmente
- I piani reticolari formano la base per il controllo permanente del
progetto.
Nella tecnica della rete si parla di quattro compiti parziali:
Importante
- La programmazione della struttura:
Analisi dei processi e rapporti di sistemazione
- Programmazione del tempo:
Ai processi vengono attribuiti tempi, si calcola la durata del
progetto
- Programmazione dei costi
Analisi dei costi del processo e del progetto
- Programmazione della capacità
Programmazione dei mezzi di produzione necessari
La base per la programmazione del percorso e delle date può essere il
piano della struttura del progetto.
41
gestione del progetto
Minos
8.6.2
Storia del “network plan”
¬X;¶
ne dei progetti. Non esistevano ancora tecniche reticolari, però mediante il diagramma di Gantt durante la gestione dei progetti è stata utilizzata
corso critico (Critical path method, CPM) e il PERT (Program Evaluation
an Review Technique), sviluppato nel 1956, si è cominciato a parlare di
tecniche di gestione reticolari.
mediante archi e nodi dà l’idea di una rete. Dopo il loro sviluppo, queste
tecniche avevano un grande successo. Così p. es. la US-Navy durante
la preparazione e la sorveglianza del progetto di missili Polaris usando il nuovo procedimento poteva risparmiare due anni di lavoro. Prima
della diffusione del computer i reticoli venivano elaborati con la penna
o prodotti con lamelle di acciaio smaltato e magneti. Questi avevano il
vantaggio che i cambiamenti nel progetto potevano essere rappresentati velocemente nella programmazione, senza dover ridisegnare tutto il
piano del progetto.
8.6.3
Concetti di base della tecnica di programmazione reticolare
,
Un processo nell’ambito della tecnica di programmazione reticolare è
X un altro che segue. Detto più in generale: Un processo è un elemento
nel suo svolgimento, che descrive un certo avvenimento. ” (DIN 69900,
parte 1).
Nella tecnica di programmazione reticolare si parla di “processi”, al contrario della terminologia del management del progetto, nella quale si
preferisce chiamare l’unità di programmazione “pacchetto di lavoro”.
I processi normalmente, sono partiti dello svolgimento del progetto; In
caso di attesa però non c’è uno svolgimento. Un processo può essere
{
¥tersi le calze” prima che può iniziare il processo “mettersi le scarpe”.
Queste dipendenze vengono descritte in dettaglio in seguito.
42
gestione del progetto
Minos
Un tale processo ha una caratteristica decisiva: la durata. È compito
della tecnica di programmazione reticolare calcolare quando si svolgono i diversi processi, considerando naturalmente la durata dei singoli
processi e le dipendenze fra di loro. Il processo di calcolo inizia con i
processi iniziali, e pone così la data iniziale al più presto dei processi
successivi (programmazione in avanti) o inizia con gli ultimi processi
della rete (che non vengono più seguiti da altri), e pone poi le date al
al più tardi di chiusura dei processi che lo anticipano (programmazione all’indietro). Con la combinazione dei due metodi, partendo da
quattro caratteristiche importanti (oltre la durata):
- Inizio al più presto (IPP) (da programmazione in avanti)
- Fine più presta (FPP) (da programmazione in avanti e la durata)
- Inizio al più tardi (IPT) (da programmazione indietro e durata)
- Fine al più tardi (FPT) (da programmazione indietro)
Deadline di un processo Vi, j:
FAZ: Earliest start time of a procedure Vi, j = FZi
FEZi, j: Earliest end-time of a procedure Vi, j = FAZi, j + Di, j
SEZi, j: Latest end-time of a procedure Vi, j = SZj (under adherence to
the project completion date)
Float
,
Con più direttive nel piano di rete possono essere calcolati più tipi di
tempi di Puffer:
,
The total buffer GPi of a procedure i is calculated by the difference of
SAZi (latest start time of i) and FAZi (earliest start time of i), or for SEZi
(latest end-time of i) and FEZi (earliest end-time of i). That shows, how
much the procedure the gives a shift without that the project end is
endangered:
GPi = SAZi - FAZi = SEZi - FEZi
43
gestione del progetto
Minos
,
Il percorso libero è il tempo che non mette in pericolo l’inizio al più presto
"}{
essere svolti soltanto nella loro posizione al più presto. ) Può nascere
soltanto quando almeno due processi svolti hanno lo stesso successore.
²
¥Î"­\$$$>
l’inizio al più presto del successivo. Vengono paragonate nel caso di
iniziale (inizio-inizio) le date del inizio al più presto e nel caso del seguire
"­\>
A
FP= FAZ(past) - FEZ
bij = temporal minimum distance between procedure i and procedure j
SI = quantity of the successors of procedure i
$|
£
FRPi, j = SZj - SZi- Di, j
,
Maximum time interval the procedure may be shifted that does not
endanger the whole project, in case all preceding procedures end to the
last possible date.
>@
UPi, j = max {0, FZj - SZi - Di, j}
44
,
Maximum time interval the procedure may be shifted; if all preceding
procedures are to end to the last possible date and all following
procedures should begin to the earliest possible date. Of practical means
the GP (for critical Path) is primarily and FP is second of importance.
gestione del progetto
8.6.4
Minos
Further terms of net planning method
Event
,
$ <
represent dates, at which certain partial procedures are terminated or
are others to begin; therefore the beginning and the end of a procedure
are events. An event does not have temporal expansion.
Relationships:
,
Relationships mark logical dependence between events or procedures.
With the sequence of two procedures A and B there are four possibilities:
End- start: B can be begun, as soon as A began
(I/O relationship or normal sequence).
Start- start: B can be begun, as soon as A began
(AA relationship or initial sequence).
Start- end: B can be terminated, as soon as A began
(AE relationship or jump sequence).
End- end: B can be terminated, as soon as A was terminated
"<<
\
Expiration structure:
The expiration structure of a network plan is represented by the whole
of the relationships.
45
gestione del progetto
Minos
8.6.5
Examples of the net planning method
Il lavoro con “network plans” può essere suddiviso in:
Un abbozzo che rispecchia la divisione del compito del progetto in processi o avvenimenti rispettando nessi logici o causali. L’abbozzo è la
> $ > X risultato dipende soltanto da lui.
Analisi del tempo in forma di una valutazione delle durate dei processi
(p.es. le durate fra due avvenimenti). Una buona valutazione è il compi
$
abbozzo e la valutazione del tempo sono molto più grandi che il segu¥|Î
del tempo.
Sorveglianza del progetto con correzioni al “network plan” e sorveglianza del progresso del progetto. Nel caso del uso esteso sono possibili
anche analisi di costi e di mezzi necessari. Prima di redigere il “network
plan” vero e proprio spesso le dipendenze dei singoli processi e le loro
durate vengono ripresi in una tabella.
Numero del
processo
1
2
3
4
5
processo
durata
inizio
compito AA
compito BB
compito CC
punto d´arrivo
0
1
4
5
0
predecessore successore
2
1
1
2
3
e
e
3
4
5
5
4
Dopo viene elaborato il “network plan” , e ogni processo viene rappre
"¥|Î
>
>>>
Ó|
Felder für Gesamtpuffer und Freien Puffer reserviert.
Nome
46
gestione del progetto
Minos
Le singole cassettine per ogni processo vengono collegati con frecce,
che rappresentano le dipendenze fra i processi. Visto che non sono permessi concatenazioni ciclici i singoli processi si lasciano sistemare nella
loro successione temporale dalla sinistra verso la destra, vie parallele
vengono posizionati sotto gli altri.
*?
Ora vanno calcolati i tempi. Per farlo si inizia con l’inizio al più presto
del primo evento e si somma la sua durata. Il risultato è contemporaneamente il punto di chiusura al più presto del procedimento attuale e
l’inizio al più presto del successivo. Quando con questo calcolo in avanti
>
>
risulta con la durata del processo il suo inizio più tardi. Dalla differenza
fra l’inizio al più presto e l’inizio al più tardi risulta il percorso totale.
In seguito, dal piano di rete che si trova qua come esempio si possono estrarre le seguenti informazioni:
Importante
­>
- La percorso critico include i processi AA e CC.
- Il processo BB può essere iniziato anche soltanto dopo un tempo percorsodi due giorni senza mettere in pericolo il progetto
47
gestione del progetto
Minos
^^
Z
,
Ci sono diversi tipi e varianti di piani di reti.
Si differenzia fra i seguenti tipi di piani di reti:
- procedura “arrow network plan” (VPN)
Nel caso del “arrow network plan” i processi vengono rappresentati
come freccia, l’ordine logica risulta dalla sistemazione dei nodi (inizio /
\"<
"'%\\ - “Event multipoint network plan” (EKN)
Nel caso del “event multipoint network plan” gli avvenimenti (stati) vengono rappresentati come nodi e dipendenze di tempo vengono rappresentati come freccia. (Esempio: Program Evaluation and Review Technique (PERT)).
- procedura „multipoint network plan“ (VKN)
Un „multipoint network plan“ è un diagramma per un piano in forma di
rete nel cui i singoli processi vengono rappresentati come quadratino
che sono segnati con le dati principiali del processo (inizio prima possibile, inizio al più tardi possibile). I processi sono collegati con frecce
che simbolizzano le dipendenze logiche. La denominazione ‘diagramma PERT’ che viene usata spesso non è giusta del tutto perché il PERT
originale usa “Event multipoint network plan”.
GERT (graphical evaluation and review tecnique)
I programmi di tecnica di programmazione reticolare attuali, tali metodi
vengono combinati. VPN, p. es. CPM, dovrebbero essere usati se il
progetto ha dei rapporti di sistemazione semplici che vanno cambiati
raramente. Piani in rete CPM sono meno adatti per la programmazione
di costi o mezzi. VKN, p. es. MPM, hanno il vantaggio che ai nodi di processi possono essere attributi tante informazioni diverse. Un altro vantaggio è che possono essere cambiati in maniera relativamente veloce.
EKN come il PERT dovrebbero essere usati in progetti in cui processi
"
piano in rete stocastico.
A causa del loro uso relativamente semplice CPM e MPM sono più diffusi.
48
gestione del progetto
8.6.7
Minos
Vantaggi della tecnica di programmare in rete
Importante
La pianta in rete è una rappresentazione molto comprensibile, chiara
e informativa, visto che fornisce un buon insieme dei processi parziali
di un progetto e le dipendenze fra i processi. A causa della rappresen X progetto e non focalizzarsi solo su un progetto parziale. Il piano in rete
è da comprendere velocemente e perciò anche facilmente da attuare e
permette una prognosi relativamente esatta di date intermedie impor $ che formano il percorso critico visto che con un software di gestione dei
progetti possono essere assegnati p. es. colori diversi per i processi del
percorso critico.
$$
programmazione reticolare può essere separata fra la programmazione
del percorso e di deadline. A causa della possibilità della rappresentazi$
¥£|Î&
sviluppato indipendente dalle deadline previste. In breve si può dire:
I piani in rete sono una forma comprensibile, chiara e informativa dello
sviluppo del progetto.
Sono facilmente da comprendere e da attuare (in quanto i dati vengono
elaborati in maniera elettronica).
Processi critici e mancanze di materiale sono facili da riconoscere.
Durante la loro redazione è necessario (ri-)pensare tutto il progetto.
Una grande parte del software disponibile per il management di progetti
appoggia la tecnica di programmazione reticolare.
8.6.8
Svantaggi della tecnica della programmazione reticolare
La rappresentazione reticolare spesso viene usata per progetti più grandi; progetti più piccoli invece si possono rappresentare bene mediante
un diagramma di Gantt più user-friendly. Alternative alla tecnica di programmazione reticolare sono l’appena menzionato diagramma Gantt o
la tecnica plannet (sviluppato dalla tecnica Gantt).
Importante
Se il piano in rete è troppo dettagliato aumenta la necessità di cont
^[[
temporaneamente, per evitare distorsioni nella programmazione. Se il
piano in rete è troppo astratto e i passi rimangono poco comprensibili,
è alta la possibilità che non possa essere compreso dalle persone che
lo utilizzano. Attività di programmazione reticolare che sono sottoposte
ad un forte processo di cambiamento, non possono essere comprese.
Questo porta a programmi non realizzabili e il progettista non riesce più
a seguire i piani.
49
gestione del progetto
Minos
8.7
Pietre miliari
,
#
(t=0) che costituiscono la base per decisioni. Nella pianta del progetto,
$
data di svincolo.
Svolgimento cronologico:
Di seguito è riportato un riassunto dello svolgimento cronologico durante la programmazione del progetto:
Programmazione dell’obiettivo:
- gerarchia dell’obiettivo (obiettivi: risultati e procedimenti)
Programmazione delle fasi e della struttura:
- porre pietre miliari come punti di controllo (liberazione)
- strutturare il progetto in funzioni e oggetti
­
Programmazione del percorso e degli deadline:
­
$"
\
­
Programmazione dei mezzi e dei costi
- correlare costi e risorse
- pareggiare le capacità
Memorizzare la programmazione basilare come base per la sorveglianza
]
target-deviazione la guida del progetto che si basa sulla target-deviazione
50
gestione del progetto
9
Minos
Passi verso il successo nel progetto
,
In seguito si trova un riassunto per la programmazione e lo svolgimento
del progetto in 21 passi. Questo metodo si riferisce al capitolo 6 (organizzazione del progetto). I contenuti tramite i compiti vengono approfonditi e provati nella realtà.
Passo nel progetto (metodo)
Incarico del progetto
1. Fissare l’oggetto del progetto.
Chiarire lo sfondo e la situazione di base.
"\
^"\
3. Chiarire le condizioni (organizzazione del progetto)
Programmazione approssimativa
4. Dividere il progetto intero in pacchetti di lavoro e descriverne contenuto e grandezza
5. Fissare chi è coinvolto nella collaborazione a quale progetto
]
X
"
X\
ª (pianta delle pietre miliari)
8. Valutazione di rischi, revisione della programmazione (dintorni del
progetto, analisi stakeholder, rischi e conseguenze)
9. Organizzazione dell’informazione e della documentazione del progetto (feed-back)
51
Minos
gestione del progetto
Programmazione dettagliata
10. Divisone dei pacchetti di lavoro in attività e la distribuzione alle
persone (elenco delle attività)
11. Fissare la capacità necessaria e la durata delle attività (pianta delle
capacità)
12. Analisi delle dipendenze (struttura del percorso)
;}
X"
rete)
;}
Xro (pianta interna delle pietre miliari)
;_'
X"
\
Programmazione / Sorveglianza
16. Programmazione del metodo di controllo (parametri di controllo,
forma di controllo, feed-back)
17. Informazione su avvenimenti non programmati (informazione su
cambiamenti)
18. Raccogliere e rappresentare le informazioni su cui ci si era messi
d’accordo
52
gestione del progetto
10
Minos
Management del rischio
,
Include tutte le attività che servono per limitare la probabilità e /o le con
£
£
Elementi del management del rischio
­
- valutazione del rischio
- sviluppo di misure per affrontare il rischio
- inseguimento del rischio
- uso di misure per affrontare il rischio, tabella con esempi
Rilevanza
Dal 1998 è in vigore la legge per il controllo e la trasparenza nell’ambito
delle imprese (KonTraG) in Germania!
rischio
A- alto
N- normale
B- basso
rischioragione
conseguenza
tempo
di risposta
poveri
decentrate
disabilità nel
stampanti con- concetto giorni
cetto
provvedimento
analisi delle
performance
progetto di sostegno
,G
53
gestione del progetto
Minos
Referencias
Internet
o.V.a. (2007): Netzplantechnik, Phasen des Projektmanagements: www.wikipedia.org
o.V.a. (2007): Projektmanagement-Methode: www.prokoda.de
o.V.a. (2007): MS-Project - Ablauforganisation: www.iou.unizh.ch (Institut für
Organisation undUnternehmenstheorie)
o.V.a. (2007): MS-Project - Ablauforganisation: www.idd.tu-darmstadt.de
o.V.a. (2007): Netzplantechnik: www.plesk-modules.com
o.V.a. (2007): PM-Werkzeuge und Prozessgruppen: www.pmqs.de
o.V.a. (2007): Projektmanagement - Phasenmodell:
www.sd-webconsult.com
o.V.a. (2007): Deutsche Gesellschaft für Projektmanagement e.V.:
www.gpm-ipma.de
o.V.a. (2007): DIN 69900-1: www. din.de
o.V.a. (1978-08): DIN 69900-1, Projektwirtschaft; Netzplantechnik; Begriffe,
Beuth, (Berlin-Wien-Zürich)
Ilsch, Dr.-Ing. Heinz-Jürgen, (2003), Projektmanagement - kompakt
54
gestione del progetto
Minos
Libri e riviste
Angermeier, Georg: Projektmanagement-Lexikon, Projekt Magazin, CD, 2005,
ISBN 3-00-018114-8
Bartsch-Beuerlein, Sandra: Qualitätsmanagement in IT-Projekten. Hanser, München 2000, ISBN
3446213597
§| %® <{ %Ì $® ­§$ ]
$ ^ £
2004, ISBN 3-8237-1177-6
Bohinc, Tomas: Projektmanagement, Soft Skills für Projektleiter, GABAL-Verlag,
Offenbach 2006, ISBN 3-636-01305-X
Burghardt, Manfred: Projektmanagement. Publicis Corporate Publishing,
<ª£^[[]§­_ª­^ª­^
Börjeson, Lena: Handbuch für Projektkiller - Projekte verzögern, blockieren,
;£^[[ª]§ª­­­[_­
Caupin, Gilles; Knöpfel, Hans; Morris, Peter; Motzel, Erhard; Pannenbäcker,
Olaf (Hrsg.): ICB-IPMA Competence Baseline, Version 2.0.IICB/EPMA-Eigenverlag,
ISBN 3-00-004057-9
Croenenbroeck, Wolfgang: Internationales Projektmanagement. Cornelson, 2004,
ISBN 3-589-23600-0
DeMarco, Tom: Der Termin. Ein Roman über Projektmanagement. Hanser, München,
ISBN 3-446-19432-0 (Zusammenfassung)
DeMarco, Tom; Lister, Timothy: Wien wartet auf Dich! Hanser, München 1998,
ISBN 3-446-21277-9
Fischer, Joachim; Spiekermann, Markus: Grundlagen von Projektmanagementsystemen - Mit ei<$®]%%]_£%§^[[
ISBN 3-937-96897-0
Füting, Ulrich Chr.: Troubleshooting im Projektmanagement, Überlastung vermeiden, Risiken erkennen, Krisen bewältigen, Widerstand abfangen. Ueberreuter, 2003,
ISBN 3-8323-1038-X
Gareis, Roland; Happy Projects! ISBN 3214082590
Gärtner, Johannes: Realistisches Projektdesign, Projektarbeit in einer wenig berechenbaren Welt.
2004, ISBN 3-7281-2934-8
Günther, Hans-Jörg; Legrand, Bob: Project Review, edditrex mini für „Q-Course Quality and Organisation“ Heche, Dirk: Praxis des Projektmanagements., Springer, Berlin 2004,
ISBN 3-540-20548-9
Heimbold, Roman: Endlich im grünen Bereich! Projektmanagement für
jedermann. mitp-Verlag, Bonn 2005, ISBN 3-8266-1547-6
55
Minos
gestione del progetto
Hindel, Bernd; Hörmann, Klaus; Müller, Markus; Schmied, Jürgen: Basiswissen Software-Projektmanagement., dpunkt, 2006, ISBN 3-89864-390-5
Hobbs, Peter: Professionelles Projektmanagement. Moderne Verlagsgesellschaft, 2002,
ISBN 3478860148
Hoelzle, Philipp: Projektmanagement, Professionell führen - Erfolge präsentieren. Haufe Verlag,
2002, ISBN 3-448-04945-X
Holert; Renke: Projektmanagement mit Microsoft Project. MS Press, 2003, ISBN 3-860-63596-4
Jankulik, Ernst; Kuhlang, Peter; Piff, Roland: Projektmanagement und Prozessmessung - Die Balanced Score Card im projektorientierten Unternehmen. Publicis Corporate Publishing, Erlangen
2005, ISBN 3-89578-251-3
Kairies, Peter; Moderne Führungsmethoden für Projektleiter. expert-verlag 2005,
ISBN 3-8169-2404-2
Kerzner, Harold: Projektmanagement, Ein systemorientierter Ansatz zur Planung und Steuerung.
mitp-Verlag, Bonn 2003, ISBN 3-8266-0983-2
§{%Ì|£^[[^]§ª[[_^[^
Ô
{­%Ì;£^[[^
­¿
ISBN 3827318378 (Rezension + Interview m. d. Autor über Internetprojekte)
¿${%Ì%Ì$$
^[[^
ISBN 3589219033
Legrand, Bob: Q-Course Quality and Organization. 2004, ISBN 1-4116-1020-2
Litke, Hans-Dieter: Projektmanagement: Methoden, Techniken, Verhaltensweisen.
Æ
®_£^[[ª]§­­[ª­;
Litke, Hans-Dieter: Projektmanagement- Handbuch für die Praxis. Konzepte - Instrumente - Umsetzung.Hanser, München, 2005, ISBN 3-446-22907-8
Æ­|{%ÌÆ$®_£^[[
ISBN 3-448-07745-3
Lück-Schneider, Dagmar, Wissensmanagement im Rahmen von Projektmanagement, in LückSchneider, Dagmar und Maninger, Stephan (Hrsg.): Wissensmanagement - Eine interdisziplinäre
Betrachtung, Brühl 2006, ISBN 3-938407-14-X
Madauss, Bernd J.: Handbuch Projektmanagement. Schäffer-Poeschel, 2000,
ISBN 3-7910-0694-0
$ÔÆ
{%Ó%Ì¿®²lags GmbH, 1999, ISBN 3-922789-68-4
56
gestione del progetto
Minos
<
¿
{<$
%Ì
Erfolgreich Konzepte entwickeln und realisieren, Econ Verlag, Berlin 2002,
ISBN 3612212176
Möller, Thor; Dörrenberg, Florian, E.: Projektmanagement, Wirtschaftsund
Sozialwissenschaftliches Repetitorium. Oldenbourg, München 2003, ISBN 3486273329
Oltman, Iris: Projektmanagement, Zielorientiert denken, erfolgreich zusammenarbeiten. Rowohlt,
Berlin 1999, ISBN 3499607638
PMI (Hrsg.): PMBOK - Project Management Body of Knowledge. ISBN 1-930699-21-2 (Deutsch)
PMI (Hrsg.): PMBOK - Project Management Body of Knowledge. ISBN 1-880410-23-0 (Englisch)
%Ó]Ô§"^[[\{<
}­
]'
]­²§|©_]^
®|£]§
3-540-42003-7
Renz, Patrick S.: „Project Governance.“ Heidelberg: Physica, 2007. (Contributions to Economics); ISBN 978-3-7908-1926-7
RKW-GPM (Hrsg.) „Projektmanagement Fachmann.“ 2 Bände, 1340 Seiten, 650 Abb.(Deutsch)
2004; ISBN 3-926984-57-0
Schelle, Heinz; Ottmann, Roland; Pfeiffer, Astrid: Projektmanager. 560 Seiten, GPM - Deutsche
¬
$$®%Ì^£^[[_]§^;^
Schelle, Heinz: Projekte zum Erfolg führen, Projektmanagement systematisch und kompakt. dtv,
®_£^[[ª]§­^­[_­
Seifert, Josef W.: Projektmanagement für kleinere Projekte - Erfolgreiche Führung und Moderati%Ì
¬§¦$$^£^[[]§­ª­__­[
Slaghuis, Bernd: Vertragsmanagement für Investitionsprojekte, Quantitative Projektplanung zur
Unterstützung des Contract Managements unter Berücksichtigung von Informationsasymmetrie.
2005, ISBN 3631542100
Tiemeyer, Ernst: Projekte erfolgreich managen., 2002, ISBN 3407363907
Tumuscheit, Klaus D.: Überleben im Projekt, 10 Projektfallen und wie man sie umgeht., 2002,
ISBN 3-478-81296-8
{<
­Æ$­$$$®%ÌÔ
$®Õ
%
2004, ISBN 3280050340
Tumuscheit, Klaus D.: Immer Ärger im Projekt. Wie Sie die Projektkiller austricksen., 2001, ISBN
3280026822
57
Minos
gestione del progetto
Projektcontrolling, Projektleitung, Projektmanagement allgemein, Internationales Projektmanagement, Projektorganisation in Das Deutsche Ingenieur-Handbuch. Der Ingenieur als Manager,
Deutscher Ingenieur Verlag, 2005, ISBN 3-8125-0553-3
VDI-Berichte/ VDI-Tagungsbände: Projektmanagement - eine Zeitreise - Projektmanagement
Praxis 2006, VDI-Verlag, Immenstaad, 12./13.10.2006, ISBN 3-18-091974-4
Volkmann, Walter: Projektabwicklung - für Architekten und Ingenieure, Verlag für Wirtschaft und
²|Æ¿^£<
^[[]§­[^­[_;­_
Winkelhofer, Georg: Management- und Projekt-Methoden.“, Springer, Berlin 2004,
ISBN 3-540-22912-4
Wieczorrek, Hans W.; Mertens, Peter: Management von IT-Projekten. Von der Planung zur Reali
^£]§^[[ª]§ª­_[ª[ª
Zimmermann, Jürgen; Stark, Christoph; Rieck, Julia: Projektplanung - Modelle, Methoden, Management., Springer, Berlin 2006, ISBN 3-540-28413-3
58
MECCATRONICA
Modulo 3: tecnica pneumatica
Manuale
(concetto)
Matthias Römer
Università Tecnica di Chemnitz, Istituto di
macchine utensili e dei processi produttivi
Germania
Concetto europeo per la Formazione Continua in Meccatronica di
personale esperto nella produzione industriale globalizzata
Progetto UE no. 2005-146319 „Minos“, durata dal 2005 al 2007
Progetto UE no. DE/08/LLP-LdV/TOI/147110 „MINOS++“, durata dal 2008
al 2010
Il presente progetto è finanziato con il
sostegno della Commissione europea.
L´autore è il solo responsabile di questa
pubblicazione (comunicazione) e la
Commissione declina ogni responsabilità
sull´uso che potrà essere fatto delle
informazioni in essa contenute.
www.minos-mechatronic.eu
tecnica pneumatica
Minos
Inhalt:
1
Pneumatica....................................................................................................................... 7
1.1
1.1.1
1.1.2
1.1.3
Introduzione ...................................................................................................................... 7
Storia dell‘aria compressa ................................................................................................ 7
Vantaggi e svantaggi dei pneumatici ................................................................................ 8
I campi di utilizzo della pneumatica .................................................................................. 9
1.2
Generazione dell‘aria compressa ................................................................................... 10
1.3
1.3.1
1.3.2
1.3.3
1.3.4
Preparazione dell‘aria compressa .................................................................................. 12
Essiccazione dell‘aria compressa................................................................................... 13
Essiccazione a freddo .................................................................................................... 14
Essiccatore ad assorbimento ......................................................................................... 15
Altri metodi d‘essiccazione dell‘aria compressa ............................................................. 15
1.4
1.4.1
1.4.2
1.4.3
1.4.4
1.4.5
Unità di mantenimento.................................................................................................... 16
Filtro e separatore d‘acqua ............................................................................................. 16
Regolatore di pressione.................................................................................................. 17
Oliatore a spruzzo .......................................................................................................... 18
Altre componenti............................................................................................................. 20
Simboli delle componenti delle unità di mantenimento................................................... 21
1.5
1.5.1
1.5.2
1.5.3
Pneumatica..................................................................................................................... 23
Cilindri a singolo effetto .................................................................................................. 23
Cilindri a effetto doppio ................................................................................................... 25
Forme speciali di costruzione dei cilindri ........................................................................ 28
1.6
1.6.1
1.6.2
1.6.3
1.6.4
1.6.5
1.6.6
1.6.7
Valvole di controllo di direzione ...................................................................................... 34
Simbolizzazione delle valvole di controllo di direzione ................................................... 34
Valvole di controllo di direzione in stato operativo .......................................................... 36
La denominazione delle connessioni.............................................................................. 39
I principi di costruzione delle valvole di controllo di direzione ........................................ 40
I tipi di costruzione delle valvole di controllo di direzione ............................................... 42
Comandi di controllo per le valvole di controllo di direzione ........................................... 49
Unità terminali delle valvole ............................................................................................ 51
1.7
1.7.1
1.7.2
1.7.3
1.7.4
Le valvole di blocco ........................................................................................................ 54
Le valvole di ritegno........................................................................................................ 54
Le valvole di scappamento rapido .................................................................................. 54
Le valvole di ritegno alternate......................................................................................... 55
Le valvole a pressione doppia ........................................................................................ 56
1.8
1.8.1
valvole di flusso .............................................................................................................. 58
flow control valves .......................................................................................................... 59
1.9
Valvole di pressione ........................................................................................................ 60
1.10
Altri tipi di valvole ............................................................................................................ 61
1.11
Denominazione dei simboli di un diagramma ................................................................. 63
3
tecnica pneumatica
Minos
1.12
Tecnica del vuoto ............................................................................................................ 65
2
Idraulica .......................................................................................................................... 67
2.1
2.1.1
2.1.2
2.1.3
Introduzione .................................................................................................................... 67
Vantaggi e svantaggi dell‘idraulica ................................................................................. 68
I settori di utilizzo dell‘idraulica ....................................................................................... 68
La costruzione di un dispositivo idraulico ....................................................................... 69
2.2
2.2.1
2.2.2
2.2.3
Aggregato idraulico......................................................................................................... 70
Serbatoio idraulico .......................................................................................................... 71
Valvole di controllo di pressione ..................................................................................... 72
Filtri idraulici.................................................................................................................... 72
2.3
2.3.1
2.3.2
2.3.3
2.3.4
Fluidi idraulici .................................................................................................................. 73
Viscosità ......................................................................................................................... 73
Altre caratteristiche dei fluidi idraulici ............................................................................. 75
Materie estranee, aria e acqua nei fluidi idraulici ........................................................... 77
Tutela ambientale ........................................................................................................... 78
2.4
2.4.1
2.4.2
2.4.3
2.4.4
2.4.4
2.4.4
Pompe idrauliche. ... ....................................................................................................... 80
Pompe ad ingranaggi ..................................................................................................... 81
Pompe a vite................................................................................................................... 84
Pompe a paletta ............................................................................................................. 85
Pompe a pistoni seriali ................................................................................................... 86
Pompe a pistoni radiali ................................................................................................... 87
Pompe a pistoni assiali ................................................................................................... 88
2.5
2.5.1
2.5.2
2.5.3
2.5.4
Cilindri e motori............................................................................................................... 91
Cilindro ad azione singola .............................................................................................. 92
Cilindro ad azione doppia ............................................................................................... 94
Fissaggio dei cilindri ....................................................................................................... 96
Motori idraulici ................................................................................................................ 98
2.6
Condotti e tubi flessibili ................................................................................................. 100
2.7
2.7.1
2.7.2
2.7.3
Valvole di controllo di direzione .................................................................................... 102
Indicazione della valvole di controllo di direzione ......................................................... 103
Posizioni di cambio sovrapposte .................................................................................. 104
L‘uso delle valvole di controllo di direzione .................................................................. 106
4
tecnica pneumatica
Minos
2.8
Valvole di blocco ........................................................................................................... 108
2.9
2.9.1
2.9.2
Valvole di pressione ....................................................................................................... 111
Valvole di controllo della pressione ............................................................................... 111
Valvole di riduzione dell pressione ................................................................................115
2.10
2.10.1
2.10.2
2.10.3
Valvole a flusso ..............................................................................................................117
Valvole a farfalla (choke) ...............................................................................................118
Valvole di regolazione di portata ....................................................................................119
Divisori di portata .......................................................................................................... 120
2.11
2.11.1
2.11.2
2.11.3
2.11.4
Idro accumulatori .......................................................................................................... 122
La funzione di un idro accumulatore............................................................................. 122
Pistone accumulatore ................................................................................................... 123
Accumulatori a sacca e a membrana ........................................................................... 124
Riempimento degli idro accumulatori con gas sottopressione ..................................... 125
5
tecnica pneumatica
Minos
6
Tecnica pneumatica
1
Pneumatica
1.1
Introduzione
Minos
Il termine pneumatica deriva dal termine greco pneuma, che significa respirare o trasmettere. Nella pneumatica viene utilizzata la compressibilita
d’aria come forma d’energia, ovvero l’aria compressa. Il termine aria in
pressione è un termine vecchio che oggi non dovrebbe essere più usato.
L’aria è composta dal 78 % di azoto e dal 21 % di ossigeno. L‘aliquota
rimanente è costituita da in altri tipi di gas o gas rari. Inoltre l’aria contiene
anche una percentuale di vapore acqueo.
La pressione atmosferica della terra è di circa 1 bar, un valore che varia
a seconda delle condizioni metereologiche. Il valore normale della pressione atmosferica, in accordo con la DIN 5450, ammonta a 101,325 kPa
ad una temperatura di 15 °.
Nel settore industriale si utilizza l’aria compressa ad una pressione che
varia dai 3 fino ai 10 bar. Spesso vengono utilizzate pressioni di 6 bar,
ma anche pressioni superiori ai 10 bar non sono del tutto inusuali. Per
operazioni di controllo e di funzionamento vengono utilizzate pressioni
che variano dai 0,2 ai 0,5 bar. Oggi giorno, nella gamma delle basse
pressioni, i controlli elettronici vanno a sostituire sempre di più i controlli
pneumatici.
L’aria compressa possiede una bassa viscosità, che permette all´aria di
essere trasportata attraverso tubature a lunga distanza. La compressibilità
dell´aria compressa è una caratteristica molto importante, essa rende
rende facilmente possibile l’immagazinamento di energia.
1.1.1
Storia dell´aria compressa
L´aria compressa è una forma di energia molto antica. Già più di 2000
anni fà si cercava di sviluppare un sistema per lanciare proiettili attraverso l´utilizzo dell aria compressa. L`aria, attraverso il suo riscaldamento,
veniva utilizzata anche per muovere le porte. I soffietti, utilizzati per
aumentare la temperatura del fuoco, possono considerarsi come i primi
compressori.
Alla fine del 19. secolo l´aria compressa veniva usata per azionare i freni
di un treno. In questo periodo nacquero anche i primi „sistemi di posta
pneumatica“
Nel 1890 venne construita a Parigi una rete di aria compressa. I segnali di
un orologio centrale venivano trasmessi a lunga distanza. Ad ogni modo
negli anni anni seguenti in molti settori fuzano preferiti congegni elettrici
invece di quelli ad aria compressa.
7
Minos
Tecnica pneumatica
Negli anni 50 e 60 molti problemi di sistema di controllo venivano risolti
utilizzando pneumatici. Questi controlli utilizzavano una bassa pressione
di qualche millibar. Oggi giorno, attraverso lo sviluppo di „Transistors„ e
microprocessori, la maggior parte dei sistemi di controllo sono realizzati
per mezzo di trasmettitori o „controlli logici programmabili“.
Molti controlli pneumatici vengono usati oggi nei processi di automazione.
1.1.2
Vantaggi e svantaggi dei sistemi pneumatici
I sistemi pneumatici vengo utilizzati in diversi settori dell´industria. Essi,
come ogni forma di energia, presentono degli vantaggi e dei svantaggi.
Essi devono essere confrontati prima di tutto con i congegni/dispositivi
idraulici, elettronici e meccanici.
I vantaggi dei congegni pneumatici sono:
– L´illimitata disponibilità dell´aria. Visto che lo scarico dell´aria può
essere disperso liberamente, non c´è bisogno di nessuna condotta
di ritorno.
– L´aria compressa può essere immagazzinata molto facilmente
all´interno di un serbatoio, per questo quindi non c´è bisogno di
azionare continuamente il compressore. In caso di una mancanza
di energia, attraverso l´energia immagazzinata nel compressore, si
potranno sicuramente completare le operazioni iniziate. L´aria compressa può essere anche trasportata all´interno di un contenitore.
– L´aria compressa può essere trasportata per lunghe distanze attraverso delle condutture. Ciò rende possibile la generazione centrale
d´aria compressa.
– L´aria compressa è pulita e stabile rispetto ai i cambiamenti di
temperatura. Le fughe d´aria non mettono in pericolo l´ambiente ed
essa può essere utilizzata in aree con rischio di esplosione. Il suo
utilizzo può arvenire senza pricolo in ambienti aperti ed umidi.
– Gli elementi dei sistemi pneumatici sono costruiti in maniera semplice, robusta e sono a basso costo. Spesso anche più leggeri rispetto
ad altri elementi simili.
– I sistemi dei controllo pneumatici fossono funzionare a velocita
varziabile. I cosichi de azionano gli arresti fossono essere impiegati
facilimente jeiche non risentano dei sovraccorichi. Velocita di molti
metri al secondo essere sorggiunte senza difficolta.
– Il movimento lineare e rotazionale è facile da eseguire. Comandi di
trasporto possono essere realizzati con ventose oppure „con pinze“.
8
Tecnica pneumatica
Minos
Ci sono anche i seguenti svantaggi:
– In paragone la fonte d´energia dell´aria compressa è molto costosa.
La compressione provoca una grande perdita di calore.
– La preparazione dell´aria compressa è molto costosa, infatti è necessario rimuovere da essa polvere ed acqua.
– Per alcuni componenti, come ad esempio le lamelle di un motore,
devono essere provati con l´aria compressa contenete olio lubrificante. Anche l´aria di scarico include l´olio. Ad ogni modo, oggigiorno la maggior parte dei componenti pneumatici non necessitano
più della lubrificazione.
– Data la compressibilità dell´aria compressa, movimenti regolari
sono quasi impossibili, così anche il posizionamento delle guide
pneumatiche. Ad ogni moto un semplice „stop“ può essere realizzato senza problemi.
– L´emissione dell´aria di scarico provoca molto rumore. Ma esso può
essere ridotto attraverso l´utilizzo dei silenziatori.
– Le forze e i momenti sono minori/più piccoli nella pneumatica che
nell´idraulica.
1.1.3
I campi di utilizzo della pneumatica
L´aria compressa ha molti usi. Sempre più settori nell´industria vengono
automatizzati, per questo motivo sono spesso richiesti movimenti lineari
e rotazionali.
Le parti in lavorazione possono essere transportate, deformate o afferrate.
Prima di tutto possono essere semplicemente eseguiti con i sistemi
pneumatici movimenti periodici.
È possibile anche il trasporto di elementi grani attraverso tubazioni. Nella
pittura spray il colore viene emesso per mezzo dell´aria compressa.
I sistemi pneumatici vengono utilizzati anche per lavori eseguiti a mano.
Avvitatori , trapani e smerigliatrici possono funzionare in ventose pneumatic.
Il trattamento e la lavorazione di pezzi o di altri oggetti vengono eseguiti
spesso per mezzo di coppe di aspirazione oppure „con pinze ad azionemento pneumatico“.
9
Minos
1.2
Tecnica pneumatica
Generazione d´aria compressa
L´aria compressa viene generata per mezzo dei compressori. I comppressori sono disponibili in di9versi tipologie. Principalmente si possono differenziare due tipi di compressore: turbomacchine e soffianti volumetriche.
Le turbomacchine vengono usate soprattutto per grandi portate.
Con queste l´aria viene portata ad alta velocità, che successivamente
essa viene utilizzata per aumentare la pressione.
L´innalzamento della pressione non è particolarmente alto, è per questo
motivo che l´incremento della pressione viene eseguito più volte. I così
delli turbocompressori, accelerano l´aria verso l´esterno spesso in maniera radiale. Un´altra forma è il compressore assiale, ad esempio nelle
turbine di un aereo.
Le soffianti volumetriche producono una piccola massa di aria compressa.
L´aria viene aspirata dentro una cella, che infine ridotta di volume. I compressori alternativi/a pistone e a vite rappresantano molto bene questo
principio. Ma esistono anche molte altre forme e modalità costruttive di
compressori.
Foto 1:
10
Compressore alternativo
Tecnica pneumatica
Minos
Un compressore alternativo a pistoni è costituito da un pistone che
si muove avanti e indietro all‘interno di un cilindro per mezzo di una
biella-manovella. Durante il movimento all‘indietro l‘aria viene succhiata
all´interno del cilindro attraverso la valvola di aspirazione. Nel successivo
movimento in avanti il pistone riduce il volume all´interno del cilindro, provocandone l´aumento della pressione. Con l´eccedere della pressione si
apre la valvola di sfogo e l´aria compressa viene spinta verso l´esterno.
I compressori a pistoni possono generare una pressione superiore ai
10 bar in un solo stadio. „I compressori multistadio“ permettono di raggiungere la pressione di parecchie centinaia di bar. A causa dell´elevato
riscaldamento dell´aria durante la compressione, essa deve essere
raffreddata durante i diversi stadi di compressione. A seconda della
costruzione, il sistema di raffredamento può essere ad aria o ad acqua.
Siccome il basamento di un compressore a pistoni deve essere lubrificato,
vengono a trovarsi tracce di olio anche nell aria compressa. In molti casi
l´olio all´interno dell‘aria compressa deve essere filtrato, per esempio nel
settore dell´industria alimentare.
Il compressore a membrana viene utilizzato per lavorare con piccole
quantità volumetriche di aria compressa. Il pistone muove la membrana
che separa l´aria compressa dal basamento.
Il compressore a vite è composto da due rotori a spirale. Attraverso la
loro rotazione, si riduce il volume tra le pareti e i rotori, comprimendo
l´aria e provocandone la sua espulsione.
In molti compressori a vite viene utilizzato l´olio per il raffredamento e
l´incapsulamento. Ma ci sono anche compressori a vite senza olio. È
anche possibile utilizzare l‘iniezione ad acqua.
Il flusso d‘aria nel compressore a vite, ha meno pulsazioni di un compressore a pistoni. L´alta pressione può essere generata utilizzando la
compressione in due tempi.
In generale i compressori a vite producono un grossa quantità d´aria
compressa, mentre i compressori a pistone sono in grado di generare
una pressione più elevata.
11
Minos
Tecnica pneumatica
Foto 2:
1.3
Compressore a vite (Foto: AtlasCopco)
Preparazione dell´aria compressa
Dopo aver compresso l´aria, essa viene immagazzinata in un serbatoio,
dove viene raffreddata e deumidificata. L‘acqua di condensa frodotta
deve venir eliminata dal serbatoio regolarmente.
Il serbatoio serve prima di tutto per la compensazione variabile di consumo. Se il volume dell´aria compressa viene regolato soltanto per mezzo
dell interruttore on and off, allora è necessario utilizzare un serbataio
piuttosto grande. Questo riduce infatti la frequenza con cui il compressore
entra in funzione.
Nei dispositivi moderni i tubi e condotti sono costruiti per distruibuire
l´aria compressa, in modo che venga utilizzata come serbatoio tutta la
rete d´aria compressa. Pertanto si evitano variazioni della pressione
causate da un differente consumo d‘aria. Le utenze che dirado fanno uso
di una grande quantità di aria compressa, si servono della connessione
di sotto-serbatoi, i quali le riforniscono della aria compressa necessaria.
12
Tecnica pneumatica
1.3.1
Minos
Essiccazione dell´aria compressa
L´aria che entra nel compressore contiene acqua in forma di vapore.La
quantità assoluta di vapore viene qui misurata in g/m³.
La quantità di vapore contenuta nell´aria dipende dalla temperatura. Un
metro cubo d´aria, con una temperatura di 20°C, può contenere al massimo 17 g d´acqua. Ad una temperatura d´aria di 50°C, possono essere
contenuti al massimo 82 g/m³.
Se il contenuto dell acqua è superiore ai valori menzionati, essa non può
più rimanere in forma di gas, quindi cadrà giù in forma di goccie d´acqua.
Il contenuto d´acqua massimo viene rappresentato graficamente nella
curva di condensazione.
Il rapporto tra il vapore contenuto nell‘aria e la quantità massima possibile viene chiamato umidità relativa. Questo valore è espresso in forma
di percentuale e dipende dalla temperatura dell´aria.
Esempio
Per esempio, se viene riscaldata l´aria, con una umidità relativa del 100%
da una temperatura di 20°C a 50°C, l´umidità relativa si abbassa con un
valore fino al 20%.
100
90
80
[g/m3]
70
60
50
40
30
20
10
0
-30
Foto 3:
-20
-10
0
10
[°C]
20
30
40
50
curva di condensazione
13
Minos
Tecnica pneumatica
La compressione porta alla diminuzione del volume dell´aria, ma allo
stesso tempo ne aumenta la temperatura, il che rende possibile all´acqua,
che si trova nell aria prima della compressione, di rimanere sotto forma
di gas. L´aria viene raffreddata all´interno di un serbatoio. Una parte
dell´acqua, che supera il massimo stabilito nella curva di condensazione,
si condensa e gocciola fuori in forma di fluido.
Per questo l´aria compressa nel serbatoio possiede un‘umidità quest
a‘aria d‘acqua relativa del 100%.Se quest‘aria entrasse nel sistema, e
continuasse il suo raffreddamento, provocherebbe una maggiore fuori
uscita d‘acqua. Questo potrebbe provocare la corrosione delle componenti
di costruzione e il loro danneggiamento. Il congelamento dell´acua, ad una
temperatura sotto i 0° C, provoca l‘ostruzione dei tubi di fuoriscita. Questo
problema viene risolto attraverso l´essiccazione dell‘aria compressa.
L´essiccazione rimuove una maggiore quantità d‘acqua contenuta nella
aria compressa. A seconda del livello d´essiccazione, l´aria compressa
può essere raffreddata maggiormente o meno, in maniera tale che acqua non venga condensata. La temperatura, alla quale l acqua nell´aria
essiccata dopo il suo raffreddamento inizia di nuovo la sua condesazione,
è chiamata punto di condensazione o punto di rugiada?
Una possibilità dell‘essiccazione dell´aria consiste in una maggiore compressione dell´aria. Dopodichè l´aria viene raffreddata dalla temperatura
circostante, in cui un pò d‘acqua viene condensata. Infine la pressione
dell‘aria compressa viene ridotta in parte incrementandone il suo volume.
Ora il vapore rimanente viene contenuto in un volume sufficientemente
ampio e diminuisce l umidità relativa. Il metodo di essiccazione viene
utilizzato raramente, perchè una compressione aggiuntiva riechede
molta energia.
1.3.2
Essiccatore a freddo
L´essiccazione a freddo, come suggerisce il nome stesso, essicca l´aria
compressa raffreddandola.
L´aria compressa viene fatta passare prima in uno scambiatore di calore.
Dopodiche essa raggiunge un serbatoio con serpentine di raffreddamento,
come quelle utilizzate per i frigoriferi. L´aria compressa viene raffreddata
qui ad una temperatura di 2-3 °C.
Infine l‘aria compressa passa di nuovo nello scambiatore di calore. Questo
riscalda lo scambiatore e allo stesso tempo raffredda l´aria compressa.
L´essiccatore a freddo permette di raggiungere punti di condensazione
di pressione di circa 2-3 °C. Raffreddamenti ulteriore non sono possibili,
perchè l‘acqua all‘interno dell‘essiccatore a freddo potrebbe congelarsi.
14
Tecnica pneumatica
1.3.3
Minos
Essiccatore ad assorbimento
Un altro congegno d‘essiccazione d‘aria compressa, usato molto spesso, è l´essiccatore ad assorbimento. L‘aria compressa passa attraverso
uno o due serbatoi. La materia d´assorbimento all‘interno del serbatoio,
assorbe il vapore acqueo essiccando l´aria compressa.
Dopo un certo numero di volte, la materia di assorbimento diviene attraverso l‘umidità satura e l‘essiccatore si spegne. Mentre l‘aria compressa
successivamente passa attraverso il secondo serbatoio, il primo serbatoio
viene rigenerato attraverso il passaggio di aria calda o fredda, la quale
rimuove l‘umidita al suo interno. L‘utilizzo d‘aria calda è più eonveniente,
in quanto è capace di assorbire più umidità.
Utilizzando essiccatori ad assorbimento possono essere raggiunti alti
livelli di essiccazione dell‘aria compressa. Il punto di condesazione di
pressione è considerabilmente più basso di 0 °C.
1.3.4
Altri metodi di essiccazione dell´aria compressa
Un ´altra possibilità d‘essiccazione d‘aria compressa avviene per mezzo
dell‘assorbimento chimic del vapore. L´aria compressa viene fatta passare
attraverso un sale di polvere, il quale si miscela con il vapore e a sua
volta lo elimina dall´aria. Le nuove polveri devono essere regolarmente aggiunte nei così detti metodi d´essiccazione ad assorbimento. Per
questo motivo questo metodo viene usato soltanto per piccole quantità
d‘aria compressa.
Ad ogni modo, gli essiccatori a membrana sono i più adatti per piccole
quantità d aria‘compressa. Essi vengono sistemati in maniera decentrata.
Siccome questi essiccatori necessitano di aria filtrata, essi vengono posti
spesso dopo dopo le unità di manutenzione.
Negli essiccatori a membrana l´aria compressa passa attraverso piccoli
elementi cavi. Il vapore si diffonde attraverso le pareti di questi cavi. Dopo
diche, una parte dell´aria compressa essiccata si dirama per essere utilizzata come aria di scarico. L´aria di scarico viene utilizzata per rimuovere
la diffusione del vapore dalla membrana d‘essiccazione.
Oltre al compressore, che viene usato come scarico d‘aria, l‘essiccatore
a membrana non necessita di forme aggiuntive di energia.
Aria compressa ben preparata ed essiccata, può essere distribuita attraverso ogni tipo di tubo di pressione. I tubi hanno spesso una pendenza, in
maniera tale che nessuna condensa d‘acqua può accumularsi nel punto
più basso del circuito.
I tubi che forniscono ogni utenza, si diramano dal tubo principale, vesso
l‘alto, poi sonc ripiegati vesso il basso. Questa soluzuione serve anche
per prevenire che l‘acqua, che può essere contenuta all‘interno di un
tubo, raggiunga l‘utenza.
15
Minos
1.4
Tecnica pneumatica
Unità di manutenzione
Nella pneumatica l´aria compressa viene prodotta in modo centralizzato.
Dopo la distribuzione ad ogni singolo macchinario, l´aria compressa viene
di nuovo adoperata in una unità di manutenzione per il suo trattamento.
Le unità di manutenzione consistono in componenti differenti, a seconda
del campo di utilizzo.
Le unità di manutenzione hanno una direzione di flusso, di solito che va
da sinistra a destra. L´unità di manutenzione deve essere ricostruita, se
è richiesto il flusso in direzione opposta.
1.4.1
Filtro e separatore d´acqua
Prima di tutto l´aria compressa passa attraverso un filtro, per rimuovere
ogni impurità in essa contenuta. Attraverso piccole guide viene portata
l´aria a muoversi in maniera circolare. La forza centrifuga spinge le particelle di polvere verso l´esterno, dove esse vengono poi accumulate.
L´aria esterna viene filtrata verso l´interno attraverso dei filtri, entrando
successivamente nella componente di unità di manutenzione. Per componenti particolarmente delicati, vengono utilizzati dei pre-filtri raffinati.
L´aria passa dall´interno verso l´esterno attraverso questi pre-filtri. Il
filtraggio raffinato deve essere eseguito soltanto per il flusso d‘aria, che
effettivamente richiede questo tipo di filtraggio.
Figura 4:
16
Filtro con separatore d´acqua (Figura: BoschRexroth)
Tecnica pneumatica
Minos
Il filtraggio deve essere eseguito nei limiti del necessario, non nei limiti
del possibile.
Un‘altra funzione del filtro è di separare eventuali presenze d´acqua che
possono essere contenute nell´aria compressa. Le particelle d´acqua
vengono accumulate insieme alla polvere, nella parte inferiore del filtro.
Il serbatoio è trasparente, quindi rende possibile il controllo di acqua
accumulata nel suo interno.
L´acqua deve essere rimossa dal filtro regolarmente. Questa operazione
può essere eseguita aprendo a mano la chiusura a vite del filtro. Nel
caso di una eccessiva accumulazione d´acqua, possiamo servirci di un
condensatore di scarico automatico. Dipendentemente dalla costruzione,
può essere usato un galleggiante che, una volta raggiunto un certo livello
d´acqua, e attraverso l´utilizzo dell´aria compressa, apre automaticamente
la valvola o il condensatore di scarico.
1.4.2
Regolatore di pressione
Oltre al filtro, l´unità di manutenzione deve mantenere una certa pressione dell´aria compressa. Per assicurare un corretto funzionamente, la
pressione, all´ingresso dell´unità di manutenzione, deve essere maggiore
rispetto a quella del regolatore di pressione.
Se non c`è pressione, il regolatore è aperto. Quando l´aria compressa viene azionata, essa passa attraverso il regolatore fino ad andare all´interno
del dispositivo. All´interno del dispositivo viene a verificarsi un continuo
aumento di pressione. La pressione agisce su una piccola membrana,
situata all´interno del regolatore. Sull´altro lato di questa membrana, si
trova una molla con una forza di pressione variabile.
Cambiando la pressione della forza esercitata dalla molla, cambia anche
la forza necessaria per spostare la membrana. Se la forza esercitata dalla
molla è maggiore a quella di pressione, la membrana viene spostata e il
passaggio attraverso il regolatore di pressione viene bloccato. In questo
modo la pressione non può aumentare.
Se in questa configurazione la forza esercitata dalla molla viene ridotta
oppure se a causa di altri motivi la pressione all´interno del sistema continua ad aumentare, anche la membrana continua ad essere spostata. Ma
la connessione dal lato della pressione al sistema, è già chiusa. Perciò
la deviazione attuata dalla membrana, permette all´aria compressa di
trapelare al di fuori del sistema attraverso le aperture del regolatore di
pressione.
La pressione, all´interno del sistema, si abbassa fino a che la molla spinge
all´indietro la membrana andando a chiudere l´apertura di aerazione.
Il controllo di pressione è agevolato da un manometro, il quale misura la
pressione a valle della valvola di controllo.
17
Minos
Tecnica pneumatica
Figura 6:
1.4.3
Regolatore di pressione (Figura: BoschRexroth)
Oliatore a spruzzo
Molte unità di manutenzione sono provviste di oliatori a spruzzo, che
vanno ad arricchire l´aria compressa di olio, che serve per la lubrificazione
dei componenti pneumatici.
Nell´oliatore a spruzzo vi è installata un condotto Venturi. L´aria compressa viene fatta passare attraverso un‘area ristretta. Questo accelera l´aria
fino a raggiungere un‘alta velocita e riduce la sua pressione. L´olio viene
risucchiato all´ interno di un serbatoio di immagazzinamento attraverso
un piccolo tubo e spruzzato, in forma di gocce di piccolissime dimensioni
nel flusso d´aria.
La quantità dell´olio aggiunto può essere valutat dal numero di gocce
viste attraverso un „monoloco“. Questa quantità può essere modificata
per mezzo di un regolatore.
Il livello dell´olio nel serbatoio deve essere regolarmente controllato e
riempito se necessario. Per una appropriata lubrificazione delle parti
pneumatiche, è richiesta una certa quantità regolare d‘olio.
Ma si incontrano anche problemi causati dalla lubrificazione. Qualche
parte viene inssuficientemente lubrificata, mentre altre parti vengono
lubrificate in maniera eccessiva.
18
Tecnica pneumatica
Minos
Molte unità pneumatiche moderne non necessitano più di aria con olio
lubrificante. Inffatti esse sono pre-lubrificate con un grasso lubrificante
che è molto duraturo nel tempo. Quindi l´aria compressa non deve essere
oliata con ulteriori dispositivi.
Da notare che una volta che delle i componenti vengono lubrificate con
l´olio, esse non possono essere più utilizzate successivamente se non
senza essere lubrificate. L´olio lava via il grasso lubrificante, e in questo modo, ulteriori lubrificazion, possono essere eseguite solo con aria
compressa oleata.
I motori a lamella appartengono a quella categoria di componenti pneumatici che devono essere lubrificati per mezzo di aria compressa oleata.
Per questi vengono installati oldatori, che vengono piazzati vicino al
motore.
Figura 6:
Olificatori a spruzzo (Figura: BoschRexroth)
19
Minos
1.4.4
Tecnica pneumatica
Altre componenti
L´unità di manutenzione può contenere anche altre componenti, dipende
dal campo di utilizzo. Valvole di controllo direzionale vengono usate per
regolare l´aria compressa in condizioni di sistema acceso o spento. Ci
sono diversi principi di costruzione. Per esempio, le valvole a sfera in
stato aperto non comportano quasi nessuno tipo di resistenza all´aria
compressa.
Tutte le valvole di controllo devono disporre di un foro di ventilazione,
che, in stato di blocco, può rilasciare l´aria compressa dal sistema. Se per
un errore venisse chiuso il foro di ventilazione e venisse bloccata l´aria
fornita, il sistema non può essere operativo senza la pressione. Soltanto
dopo il rilascio della pressione il sistema può lavorare senza rischi.
Molte delle valvole di blocco possiedono uno o più fori per assicurare
il mantenimento della posizione di blocco. Questo viene utilizzato ad
esempio per prevenire l‘azionamento dell ´area compressa, nel caso una
persona si trovasse all´interno dell´area di sistema.
È anche possibile accendere o spegnere l´aria compressa per mezzo di
valvole di blocco elettriche.
Un ´altra componente è l´interruttore della pressione.Esso controlla se la
regolazinoe della pressione à attivata, ed invia in questo caso un segnale
ai controlli. Questo previene che il sistema entri in azione con una forza
insufficiente, per cui ai cilindri non verrebbe portata la forza necessaria
di cui hanno bisogno.
In alcune unità di manutenzione, vengono utilizzate valvole a persiana
per azionare l´aria compressa. Queste valvole vengono chiamate anche
avviatori progressivi, perchè esse permettono all´aria compressa di passare gradualmente attraverso il sistema. Questo permette ai cilindri di
muoversi lentamente dalla loro posizione. Una volta raggiunta la metà
della pressione operativa le valvole a persiana si aprono completamente
e forniscono al sistema la pressione completa.
I distributori/separatori nell´unità di mantenimento, dividono il flusso del
volume d‘ario. Questo rende possibile la filtrazione di una parte dell´aria
compressa e cosi , successivamente, quella di un altra parte. Questa
aria compressa specialmente trattata può essere utilizzata per operare
su valvole ad elevata sensibilità, dal momento che non è necessaria con
altre valcole una filtrazione spinta.
20
Tecnica pneumatica
1.4.5
Minos
Simboli delle componenti delle unità di manutenzione
Per gli schemi dei circuiti idraulici e pneumatici si utilizzano simboli determinati dalla ISO DIN 1219. La prima parte di questa norma descrive la
simbologia. La seconda parte spiega le regole e le istruzioni per tracciare
la schema di un circuito.
L´aria compressa è rappresentata con un triangolo. In molti diagrammi
si trova i vecchio simbolo, un cerchio con un punto al centro. Questo
simbolo non deve essere più usato. Nell´idraulica la pressione viene
rappresentata con un triangolo pieno.
Molti simboli, nella pneumatica e nell‘idraulica, hanno la forma di una
piccola cassetta. Il filtro è rappresentato con un quadrato ruotato di 45°.
La linea verticale tratteggiata rappresenta il filtro.Due linee incrociate
simboleggiano i separatori d´acqua. La direzione del flusso, come in molti
altri simboli, va da sinistra a destra.
La valvola di controllo di pressione viene rappresentata anche con un
quadrato. Il simbolo di una molla e di una linea tratteggiata vengono
disegnati su due lati opposti. La freccia sul simbolo della molla significa
che la pressione della molla è modificabile.La linea tratteggiata è un
controllo interno che agisce dall´esterno del regolatore di pressione in
contrasto alla spinta della molla.
sorgente di pressione
filtro con separatore
d’acqua
valvola che controlla
la pressione
manometro
lubrificatore ad olio
nebulizzato
Figura 7:
Simboli dell´aria compressa
21
Minos
Tecnica pneumatica
La freccia all´interno del quadrato simboleggia la membrana. Ess può
essere considerat come dislocabile. Con l´aumento e della pressione il
flusso attraverso la valvola di controllo della pressione viene bloccato.
Il triangolo piccolo rappresenta il foro di ventilazione, il quale permette
di raggiungere pressioni molto elevate.
Un manometro viene rappresentato da un cerchio con una freccia
all´interno che simboleggia l´indicatore. Manometri utilizzati per la misurazione di pressioni differenti, dispongono di due connessioni nella
parte inferiore.
Il simbolo di un oliatore a spruzzo è un quadrato ruotato di 45°, come
il simbolo del filtro. La linea piccola rappresenta l‘alimentazione d´olio.
I simboli delle componenti dell´unità di manutenzione, possono essere
disegnati anche in dettaglio.Siccome le componenti singole appartengono
ad un modul, il suo contorno fuio essere individuato con una linea, tratto
e punto.
In molti casi è sufficiente rappresentare l´unità di manutenzione con un
simbolo semplificato.
dettaglio dell’unita di servizio
simbolo semplificato dell’unita di servizio
Figura 8:
22
simboli dell´unità di manutenzione
Tecnica pneumatica
1.5
Minos
Pneumatica
Il moto lineare, frequentemente usato nella pneumatica, viene ottenuto
per mezzo di cilindri. Ci sono cilindri a effetto singolo o a doppio effetto.
Il moto rotazionale può essere generato dai cilindri eon appositi meccanismie. Esistono anche altri sistemi rotanti.
Il moto rotazionale continuo può essere realizzato per mezzo di motori
pneumatici. Ad esempio i motori a lamella vengono utilizzati come trasmissione. Frequenze di rotazione molto elevate, come quelle dei trapani
da dentista, possono essere raggiunte con le turbine.
I sistemi pneumatici, caratterizzati da più componenti, vengono rappresentati in blocchi o in unità di modulo. A d esempio i cilindri possono
essere combinati con le unità di guida, in maniera tale anche da ricevere
la forza radiale.
1.5.1
Cilindri a singolo effetto
Cilindri a singolo effetto possono svolgere un lavoro soltanto in una direzione. Essi hanno una sola connessione per l´aria compressa, dove
passa l´aria compressa che serve a spingere il pistone.
Il pistone (a camera stelo tuffante) hanno un foro di ventilazione. Esso
previene il „Contraccolpo“ di pressione che compare nel pistone, quando
viene guidato verso l´esterno. In questo foro passa l´aria che dall´esterno
va all´interno della camera, prevenendo la formazione di pressione negativa. Il foro di ventilazione è completato anche da un elemento di filtraggio,
che serve a proteggere la camera del pistone dalla polvere esterna.
Figura 9:
pistone a effetto singolo (figura: BoschRexroth)
23
Minos
Tecnica pneumatica
La corsa di ritorno viene eseguit per mezzo della reazione di una molla.
Il valore della molla è tarato per permettere al cilindro di ritornare senza
problemi nella sua posizione inziale, senza influire considerevolmente
sulla forza opposta impiegata per guidare il pistone verso l´esterno.
In altre soluzioni, quando non è presente alcuna pressione, la forza elastica mantiene il cilindro completamente all‘esterno. L´applicazione della
pressione guida il cilindro verso l´interno.
I cilindri a effetto singolo hanno corsa massima di 100mm. Essi servono
per bloccare, alimentare o espellere pezzi durante la lavorazione.
I martinetti ad aria rappresentano una soluzione speciale per i cilindri a
effetto singolo. La grande area della sezione permette di generare una
forza molto grande rispetto a quelle che di solito vengono usate nella
pneumatica. Esse vengono usate per sollevare grandi masse e allo
stesso tempo assorbono le vibrazioni.
Figura 10:
24
soffietto (Figura: BoschRexroth)
Tecnica pneumatica
1.5.2
Minos
Cilindri a dopio effetto
I cilindri a dopio effetto possono operare in tutte e due le direzioni. La forza
all´entrata è più piccola di quella all´uscita, perchè il pistone possiede
una area di superficie a forma di anello più piccola.
Esiste un grande numero di soluzioni costruttive differenti. La grandezza
del diametro di un pistone varia da pochi millimetri fino a circa 250mm.
La corsa può essere più lunga o più corta del diametro del pistone.
Molti cilindri sono provvisti di un interruttore. Questi interruttori determinano la posizione del pistone. Gli interruttori sono situati alla fine del
cilindro.
Per l´attivazione senza contatto degli interruttori per cilindri, i pistoni sono
provvisti di un magnete ad anello. Quando il pistone si avvicina all interruttore del cilindro, esso viene attivato per mezzo dell campo magnetica.
Figura 11:
Cilindro a doppio effetto (Foto: BoschRexroth)
25
Minos
Tecnica pneumatica
Gli interruttori per cilindro più semplici sono quelli a lamine. Essi consistono in piccoli tubi di vetro con due lamine di metallo. Attraverso il campo
magnetico si congiungono le lamine tra loro.
I contatti a lamine sono economici e possono sopportare differenti tipi
voltaggio. Ad ogni modo un elevata quantità di corrente potrebbe distruggere i contatti oppure saldarli insieme. Per questo motivo viene utilizzato
un circuito di protezione aggiuntivo. Inoltre essi sono dotati di un LED
che serve a segnalare quando il contatto è attivo.
Esistono anche interruttori elettrici per cilindri. Siccome essi lavororano
senza alcun tipo di contatto meccanico, sono praticamente senza fili. Gli
interruttori elettrici per cilindri sono più costosi e disponibili soltanto per
determinati voltaggi.
I pistoni con magneti ad anello possono attivare anche interruttori pneumatici per cilindri. Questi interruttori hanno un piccolo consumo d´aria e
possono essere operativi utilizzando una piccola pressione.
Questi interruttori possono essere utilizzati per area a rischio di esplosione. Ad ogni modo essi vengono difficilmente utilizzati.
Foto 12:
26
contatti reed
Tecnica pneumatica
Minos
L´utilizzo di un cilindro per muovere grandi masse può causare un forte
impatto alla posizione finale. Per prevenire questo, viene utilizzato, alle
due estremita del pistone, uno smorzatore di fine corsa.
Uno smorzatore di fine corsa può essere realizzato attraverso la chiusura
del foro di ventalazione appena prima che il pistone raggiunga la posizione
finale. L´aria rimanente crea un cuscinetto, che permette un rallentamento
del pistone. L´aria rimanente fuoriesce attraverso una valvola regolabile,
cosìcche il pistone raggiunge lentamente la sua posizione finale.
La smorzatore di fine corsa ha lo svantaggio di richiedere un lungo tempo perché il pistone possa raggiungere la posizione finale. La distanza
necessaria per ottenere la smorzamento non può essere modificata. Si
può anche verificare un contraccolpo del pistone sul cusciono d‘aria.
Un‘alternativa allo smorzatore di fine corsa può essere un paracolpi montato all‘esterno del cilindro. Esso può essere costituito da un tampone di
materiale sintetico o da un ammortizzatore idraulico. Nei cilindri di piccole
dimensione, per attenuare gli urti, possone essere inseriti al loro interno
dei dischi di materiale sintetico.
Bild 13:
smorzatore di fine corsa (figura: BoschRexroth)
27
Minos
1.5.3
Tecnica pneumatica
Soluzioni costruttive speciali per cilindri pneumatici
Come suggerisce il nome, i cilindri senza stelo non ne dispongono. Il
pistone si muove all´interno del cilindro e trasmette il suo movimento ad
un cursore situato all´esterno.
Le forze possono essere trasformate utilizzando tre principi costruttivi
diversi. Nel cilindro a bandella il pistone muove una bandella d´acciaio,
che è collegata alla slitta per mezzo di una trasmissione a pulegge. In
questo tipo di cilindro il pistone si muove in direzione opposta al carrello.
Questo trasmettore deve essere preso in considerazione specialmente
quando si installa uno smorzatore di fine corsa.
In altre tipologie si trova una fessura lungo il cilindro. Un sistema di tenuta a nostro isola il cilindro dall‘interno e tiene chiusa guida. Attraverso
il movimento del pistone viene sollevato di poco il nastro. L´apertura va
a creare una connessione meccanica tra il carrello esterno ed il pistone
all´interno.
Una terza possibilità di accoppiamento tra pistone e carrello, consiste
nell´utilizzare un potente magnete permanente. Per un normale funzionamento il campo magnetico è sufficente a trasmettere le forze dal
pistone al carrello.
Figura 14:
28
cilindro a banda (figura: BoschRexroth)
Tecnica pneumatica
Minos
Ad ogni modo, la connessione tra il pistone ed il carrello può interrompersi
a causa di un impatto esterno, alla quale il carrello può essere esposto.
Essa può essere ripristinata facilmente muovendo il pistone.
Il vantaggio più grande di un pistone senza stelo è la sua corsa. Essa è in
grado infatti di raggiungere diversi metri. Allo stesso tempo la lunghezza
intera di questi tipi di cilindri è appena maggiore di quella di corsa, perciò
essi possono essere installati in posti con spazio limitato.
In questi cilindri l´asse del pistone non rischia di piegarsi, per via della loro
costruzione. Ad ogni modo, soltanto quando viene fissato all‘estremità
del pistone un cilindro lungo può curvarsi a causa del proprio peso. In
questo caso deve essere provvisto di un adeguato supporto.
Siccome i pistoni in cilindri senza stelo hanno la stessa area di superficie
su entrambi i lati, essi possono generare le stesse forze da tutte e due
i lati. Se venissero esposte alla pressione tutte e due le superfici del
pistone in maniera equivalente e contemporaneamente, allora il cilindro
rimarrebbe fermo.
I cilindri senza stelo sono più costosi rispetto a quelli con lo stelo, a causa
della loro costruzione complicata e del loro costos sistema di tenuta..
Cilindri con pistone a stelo che passa attraverso il pistone hanno la stessa
area di superficie. Quando sono operativi, una parte del pistone sporge
verso l´esterno, l‘altra invece verso l interno.
La seconda parte del pistone a stelo può essere usata per attivare
l´interruttore. Questo potrebbe essere necessario nel caso non ci fosse
abbastanza spazio nell‘altra parte del pistone.
Alcuni pistoni a stelo sono costruiti cavi. Liquidi, per il raffreddamento e
cavi elettrici possono essere fatti passare all‘interno dello stelo, invece
di essere posizionati all‘esterno del cilindro.
I cilindri in tandem vengono usati per incrementare la forza del cilindro
per asseguati valori della pressione e del diametro. Due o quattro cilindri
sono combinati uno dopo l‘altro, cosicche i cilindri in posizione inferiore
spingono i pistoni situati di fronte. Le forze dell´intero gruppo crescono
in modo conseguente.
È possibile generare una forza anche con due cilindri paralleli. Questi
possono essere applicati al carrello, dove il cilindro e le unità di guida
sono combinate in un solo gruppo. La lunghezza del carrello può essere
ridotta attraverso l‘utilizzo di due pistoni.
29
Minos
Tecnica pneumatica
Le unità di guida proteggono anche i pistoni a stelo dalla torsione. Questo
è possibile anche con pistoni di forma non circolare. Tutte le forme dei
pistoni, da quelle ovali fino a quelle rettangolari, sono protette dal rischio
di torsione. Lo stesso vale per i pistoni di forma ottagonale, che hanno
l´area del pistone piu larga e di conseguenza trasmettono una forza
maggiore rispetto ai pistoni circolari.
Un‘altra forma speciale di cilindri sono i cilindri ad „impatto“. Essi dispongono di una piccola camera nel punto inferiore del pistone. Questa viene
preriempita con aria compressa. Quando i cilindri iniziano a muoversi
l´aria compressa scorre velocemente nella camera del pistone, il che
porta i cilindri a spostarsi con ad elevata velocità.
I cilindri si muovono molto spesso dalla posizione iniziale alla posizione
finale. Al fine di permettere una sosta in un punto possibile, mentre il pistone compie la sua corsa,, vengono utilizzati cilindri a posizione multipla.
Per questo due cilindri a corsa differente vengono combinati insieme nella
parte inferiore del pistone.
Entrambe le posizioni finali possono essere raggiunte quando tutti e due
i cilindri corrono verso l‘esterno o l´interno allo stesso tempo. Quando si
muove un pistone singolo soltanto una posizione intermedia può essere
raggiunta.
A
Figura 15: cilindri a posizione multipla
30
B
C
D
Tecnica pneumatica
Minos
Il cilindro può essere anche fermato in posizione intermedia rispetto alle
posizioni finali se entrambe le connessioni vengono bloccate. Siccome
l´aria compressa all´interno del cilindro è comprimibile, il pistone a stelo
è ancora in grado di compiere piccoli movimenti.
Le unità di blocco vengono usate per fissarelo stelo del pistone. Quest
ultimo deve essere più lungo per poter passare attraverso di loro. Il pistone
a stelo viene bloccato per mezzo di un eccentrico o un disco a euneo.
Il pistone può muoversi di nuovo mediante l´aria compressa. Il blocco
può essere eseguito anche usando l´aria compressa oppure attraverso
l´ausilio di una molla regolabile. La forza di blocco deve essere modificata
così de lo stelo del pistone sia aucora impedito a munoversi.
Accanto al blocco del pistone, che può essere eseguito ad ogni posizione
della corsa, può essere installato anche un blocco nella posizione finale.
Questo può essere usato per impedire che cilindri poisizionati verso il
basso possono essere spostati da una forza esterna senza nessuna
pressione applicata. con questo accorgimento fossono anche essere
evitati sfostamenti non desiderati del cilindro per cadute di pressione.
Figura 16:
unità di blocco (figura: BoschRexroth)
31
Minos
Tecnica pneumatica
Oltre ai cilindri utilizzati per movimenti lineari, vi sono anche quelli a
movimento oscillante e rotazionale.
Per esempio è possibile azionare una ruota dentata utilizzando due cilindri
ed uno o due ingranaggi a cremagliera. Per questo possono essere usati
cilindri ad effetto singolo, così che ogni cilindro possa spingere l´altro
nella sua posizione di partenza. È possibile utilizzare anche cilindri ad
effetto doppio. La maggior parte delle costruzioni possono compiere un
angolo di rotazione superiore a 360°.
I cilindri oscillanti hanno un elemento a cremagliera che aziona una
ruota e che si muove avanti ed indietro all‘interno della sua camera. La
soluzione costruttiva è compatta. La geometria delle parti è tale che non
sono consentite rotazioni superiori a 270°. Le rotazioni normalmente
sono di 90° o di 180°.
Angoli più piccoli possono essere ottenuti mediante un fermo regolabile
esterno.
Le guide rotanti sono anche note come motori ad aria compressa. I più
diffusi sono i motori a lamelle. Queste sono portate da un rotore eccentrico
e sono mobili radialmente. La forza centrifuga che agisce su di esse le
mantiene aderenti alla cassa.
Figura 17:
32
leve rotazionali (figura di: BoschRexroth)
Tecnica pneumatica
Minos
L‘aria compressa passa in un piccolo spazio tra le lamelle. Il movimento
ruotante è generato da forze impari che spingono le lamelle. La direzione
di rotazione viene cambiata attraverso l‘inversione del flusso di direzione.
I motori a lamella sono di piccola dimensione e hanno una costruzione
semplice. Questi vengono utilizzati per macchine smerigliatrici e potenti
avvitatori. Come altre macchine penumatiche, i motori a lamella sono
impenetrabili da sovratensioni e possono essere usati senza problemi con
carichi che possono portarli ad una interruzione di attività. La frequenza
di rotazione può essere continuamente modificata. I motori a lamella
appartengono a quei pochi dispositivi pneumatichi che utilizzano aria
compressa oliata.
Meno frequente oggi è l‘utilizzo di motori a pistoni radiali, a pistoni assiali
ed a ruota dentata. Uno dei loro vantaggi è che possono essere usati in
aree ad alto rischio di esplosione. Per questo vengono utilizzati spesso
nelle miniere.
Con i motori a turbina si può raggiungere una frequenza di rotazione
molto alta. L‘aria compressa adoperata in un trapano dentato raggiunge
una frequenza di rotazione superiore ai 400000 giri al minuto.
Figura 18:
macchina smerigliatrice ad aria compressa (foto: AtlasCopco)
33
Tecnica pneumatica
Minos
1.6
Valvole di controllo di direzione
Valvole di controllo di direzione vengono usate per accendere o spegnere
l‘aria compressa e per regolare la direzione della portata. Nella pneumatica queste valvole possono essere usate come generatori di segnale.
Come „attuatori“, esse regolano i cilindri ed altri apparecchi/sistemi. Nei
dispositivi pneumatici elettrici esse vengono utilizzati solo come attuatori.
Le valvole di controllo di direzione variano a seconda del loro numero di
connessioni, delle posizioni di cambio e del loro tipo di esecuzione. La
simbolizzazione di una valvola di controllo di direzione deriva dal numero
di connessioni e dalla posizione degli interruttori. Questi due valori si
separano con uno slash.
Esempio
Un controllo 5/2 ha cinque connessioni e due posizioni.
Altre caratteristiche importanti sono la loro portata e la loro durata nel
tempo. Altre note specifiche variano a seconda dei modelli, che non
vengono specificati nelle tabelle grafiche relative a questi pistoni .
1.6.1
Simbolizzazione delle valvole di controllo di direzione
I simboli delle valvole di controllo di direzione è composta da piccole
cassette. Queste possono essere quadrate o rettangolari, dipende dal
numero di connessioni. Il numero delle cassette conforma il numero di
posizione degli interruttori.
Le valvole di controllo di direzione pneumatiche sono a due o tre posizioni. Qualche volta è possibile che alcune valvole siano quattro posizioni.
Si tratta di valvole di controllo di direzione a tre posizioni di cambio che
possiedono una quarta posizione d‘emergenza, che può servire in caso
di malfunzionamento del dispositivo.
La direzione del flusso è rappresentata da una freccia all‘interno della
cassetta. La direzione della freccia può essere rivolta verso l‘alto o verso
il basso. Una singola freccia sta a signidicare che la direzione del flusso
è possibile soltanto nella direzione da lei indicata. Due freccie, invece,
rappresentano la possibilità di scorrimento in due direzioni.
Linee corte con un trattino orizzontale rappresentano un blocco. Nella
connessione non è possibile applicare un fluido.
Le connessioni delle valvole di controllo di direzione possono essere
mostrate soltanto in una delle cassette. Nella pneumatica il loro numero
varia dalle due fino alle cinque connessioni.
34
Tecnica pneumatica
Minos
Io spostamento da una cassetta all‘altra indica lo spostamento delle
posizioni delle valvole di controllo. Le connessioni rappresentate da una
piccola linea esterna, non possono essere dislocate.
Nei simboli a due posizioni le connessioni sono sempre indicate sulla
cassetta di destra. Mentre in quelle a tre posizioni sono indicate nella
cassetta centrale. Una eccezione è possibile soltanto nel caso in cui la
connessione della valvola venga collocata su una posizione di partenza
differente.
Se si trovano più di due connessioni in una posizione di comando, le
freccie vengono congiunte da un punto. Ma nella pneumatica questo
avviene raramente.
Le valvole di controllo di direzione, nella pneumatica, si spostano solitamente da una posizione all‘altra. Ma ci sono anche valvole proporzionali,
che provvedono alla continua transizione tra le posizioni. Queste vengono
indicate da una linea sottile nella parte superiore ed accanto al controllo
valvolare di direzione. Le valvole proporzionali vengono regolate sempre elettricamente. Queste possiedono quattro posizioni di comando e
vengono usate raramente.
Figura 19:
elementi dei simboli delle valvole di controllo di direzione
35
Minos
Tecnica pneumatica
Figura 20:
ventilazione canalizzata e non canalizzata
Nella maggior parte dei casi l‘aria di scarico delle valvole di controllo di
direzione, fuorisce nell‘ambiente circostante. Quando l‘aria viene espulsa
da una semplice apertura, viene chiamata aria di scarico non canalizzata.
Mentre, l‘aria canalizzata, passa attraverso un‘apertura filettata, dove è
possibile applicarvi, ad esempio, un silenziatore.
La ventilazione indiretta (non canalizzata) viene rappresentata da un
triangolo collocato direttamente nei simboli delle valvole di controllo direzionali. Questo simbolo lo troviamo spesso con le valvole a direzione
del flusso unica. La ventilazione diretta viene rappresentata invece con
un triangolo un pò rimosso e connesso con le valvole direzionali da una
piccola linea. Se viene utilizzato anche un silenziatore, viene utilizzato il
suo simbolo al posto del triangolo.
1.6.2
Valvole di controllo di direzione in stato operativo
Quando le valvole di controllo di direzione entrano in funzione viene
indicato sulla destra e sulla sinistra del suo simbolo. L‘azionamento è
rappresentato a sinistra del simbolo delle valvole di controllo. Mentre lo
spostamento all‘indietro, che molto spesso viene eseguito da una molla,
è indicato a destra.
L‘azionamento delle valvole è suddiviso genericamente in quattro gruppi.
Il primo gruppo include l‘azionamento muscolare. Queste forze vengono
esercitate da persone umane; esse vengono generalmente indicate con
due linee ed una piccola linea di intersezione. Il semicerchio nella linea di
intersezione rappresenta il bottone di azionamento. La leva d‘azionamento
viene rappresentata da una linea diagonale con un piccolo cerchio, che
rappresenta la connessione. È possibile rappresentare l´azionamento
anche con una pedale.
36
Tecnica pneumatica
Minos
L‘azionamento meccanico viene eseguito da componenti meccaniche.
Il tipo più semplice è il pestello, che serve a tirare fuori le valvole. I movimenti trasversali delle operazioni di direnzione delle valvole possono
essere azionate per mezzo di leve a rullo. Un caso speciale è la leva a
rullo uni-direzionale. Essa aziona le valvole di controllo di direzione in
una unica direzione. In direzione opposta il rullo reclina. La giuntura viene
rappresentata da un piccolo cerchio.
La molla che respinge indietro le valvole di controllo viene indicata sulla
destra del simbolo. La molla è combinata spesso con un bottone.
Mentre, le valvole che non devono essere respinte in modo automatico,
sono fornite di una „tacca“. Le tacche possono essere simboleggiate o alla
destra del simbolo delle valvole oppure conbinate con il simbolo della leva.
Gli attuatori pneumatici appartengono al terzo gruppo, nel quale la valvola viene spostata attraverso l‘aria compressa. L‘azionamento ad aria
compressa viene rappresentato da un triangolo vuoto diretto al corpo
delle valvole. Una cassetta aggiuntiva con un triangolo al suo interno
rappresenta il pilota di controllo. Si tratta di un amplificatore, il quale
incrementa i segnali pneumatici, a bassa pressione, al fine di assicurare
gli scambi delle valvole di controllo.
Figura 21:
attuatori delle valvole di controllo di direzione
37
Minos
Tecnica pneumatica
Le valvole che vengono azionate pneumaticamente possono essere
riportate alla loro posizione di partenza attraverso l‘ausilio di una molla.
Oppure usando un secondo controllo di connessione d‘aria nel lato destro.
Le valvole che possiedono due posizioni di cambio e due connessioni
d‘aria, vengono chiamate valvole ad impulso.
Entrambi i controlli di connessione di solito hanno la stessa priorità.
Qualche volta è necessario che un solo controllo di connessione d‘aria
necessiti di una maggiore priorità rispetto all‘altro. Queste vengono chiamate valvole ad impulso a pistoni differenziati. I rettangoli che si trovano
a destra e a sinistra del simbolo, hanno un‘area di superficie diversa tra
loro. Il rettangolo più grande agisce sulle valvole di controllo che possiedono una forza maggiore. Per questo che gode di maggiore priorità.
Di solito, le valvole di direzione vengono ripristinate nella loro posizione
di partenza tramite l‘ausilio di una molla meccanica. Altre volte, invece,
vengono utilizzate molle ad aria. Queste molle vengono rappresentate
sul lato destro da un triangolo rivolto verso l‘interno.
Nell elettropneumatica i controlli valvolari di direzione vengono spostati
spesso per mezzo di segnali elettrici. I solenoidi, necessari per questo
tipo di operazione, vengono rappresentati da rettangoli con una barra
diagonale al loro interno. Le valvole più piccole vengono comandate in
maniera diretta dai solenoidi.
Nelle valvole piu grandi la forza dei solenoidi viene amplificata dal pilota
di controllo. Il suo simbolo è collocato tra i simboli dei solenoidi. Il triangolo vuoto significa che il pilota di controllo è azionato attraverso l‘utilizzo
d‘aria compressa.
In molte valvole di controllo di direzione il pilota di controllo è fornito d‘aria
compressa attraverso le valvole stesse. Questo però non è sempre possibile. Quindi il pilota di controllo delle valvole deve essere fornito d´aria
compressa per mezzo di una sorgente esterna. Essa viene rapresentata
da una piccola linea che rappresenta la connessione dell‘aria compressa
al bottone del triangolo del pilota di controllo.
Valvole a funzione elettrica hanno un attuatore manuale aggiuntivo,
che offre la possibilità di azionarle manualmente in caso di mancanza
di energia elettrica oppure di problemi relativi al dispositivo. Siccome
l´azionamento manuale deve essere eseguito dall‘operatore, il suo simbolo è lo stesso adoperato per le valvole che utilizzano la forza muscolare.
Questo viene indicato sul simbolo del pilota di controllo, mentre, in quelle
senza, viene indicato direttamente sulle valvole.
„A locking version“ del pilota di controllo puo essere anche implementato.
Esso viene indicato con una piccola tacca nel simbolo.
Nelle valvole a tre posizioni di cambio, la posizione intermedia puo essere
occupata da una molla centrata. Percio vengono aggiunte due molle sulla
destra e sulla sinistra delle valvole di controllo direzionale.
38
Tecnica pneumatica
1.6.3
Minos
La denominazione delle connessioni
Nel passato, le connessioni delle valvole venivano rappresentate in lettere. Mentre, nella DIN ISO 5599 vengono utilizzate le cifre. Tutte le altre
valvole devono essere designate con i numeri corrispondenti alle valvole
di controllo di direzione. Poichè le componenti pneumatiche hanno una
lunga durata, è necessario denotare le lettere.
La connessione dell‘aria compressa viene indicata con il numero 1. Le
connessioni operative hanno il numero 2. Se abbiamo più connessioni
operative, esse verranno designate, seguentemente al loro valore, con
un numero pari, vale a dire 4. Lo stesso vale anche per le connessioni
di scarico d‘aria, ma attraverso l‘utilizzo di numeri dispari, quindi 3 e 5.
La freccia all‘interno del simbolo indica il flusso di direzione. In un controllo valvolare di direzione 5/2, in posizione di partenza, l‘aria compressa
passa sempre dalla connessione 1 alla connessione 2. Questo passaggio
è valido anche quando viene applicata la pressione sul controllo destro
di connessione. Quindi il controllo destro della connessione d‘aria viene
rappresentato con 12.
La connessione di controllo situata a sinistra muove la valvola di controllo
di direzione su un‘altra posizione di cambio. Così facendo la connessione
d‘aria compressa 1, e la connessione operativa 4, vengono connesse
insieme. La connessione di controllo viene indicata con 14.
In una valvola di controllo di direzione 3/2 la posizione sinistra connette
l‘aria compressa 1 con la connessione singola operativa 2. Perciò sulla
connessione sinistra apparirà il numero 12. Nella posizione destra l‘aria
compressa rimane sconnessa. Il controllo destro dell‘aria viene designato
con 10.
A
2
Z
Y
P
A
R
B
3
4
Z
R P
10
1
Y
Figura 22:
12
2
14
S
12
5
1
3
denominazione delle connessioni
39
Minos
1.6.4
Tecnica pneumatica
I principi di costruzione delle valvole di controllo di direzione
Ci sono diversi modelli di costruzione delle valvole di controllo di direzione
pneumatiche. È possibile distinguere due principi base di costruzione.
L‘otturazione delle valvole con sede viene eseguita con delle piastre,
sfere o corpi a sfera. Le superfici degli otturatori vengono molto spesso
corredate in plastica.
L´aria compressa spinge l‘otturatore verso la superficie di otturazione.
When the sealing wears out it will be pressed more towards the
sealing surface. Le valvole con sede sono considerate per questo ottimi
„sigilli“. Esse richiedono una forza lavorativa relativamente grande, che
richiede anche l‘utilizzo della pressione.
Le posizione di blocco e le posizioni di passaggio necessitano di una
costruzione differente rispetto alle valvole, a causa dell´influenza della
pressione.
Quando vengono azionate le valvole con sede esse accumulano rapidamente una larga area di sezione del flusso. „The switching step is
short“. Costruzioni semplici hanno un intersezione e permettono all‘aria
compressa di passare direttamente nel foro di ventilazione per un breve
periodo di tempo.
3 (R)
2 (A)
1 (P)
Figura 23:
40
valvola con sede (immagine di: BoschRexroth)
Tecnica pneumatica
Minos
Le valvole ad otturatore hanno una dimensione costruttiva relativamente
piccola. Esse vengono usate maggiormente con flussi di bassa portata,
come ad esempio nei trasmettitori di segnali. Esistono diversi tipi di soluzioni costruttive che riducono molti degli svantaggi prodotti da queste
valvole.
Le valvole a spola hanno un cursore a forma di pistone o piatto. Esse
hanno di solito due o tre posizioni di commutazione. La tenuta può avvenire sia tra l‘elemento mobile di metallo e la sede, sia mediante quelli
di tenuta interni alla cassa o montati sull‘elemento mobile.
Valvole di controllo di direzione a spola in acciaio resistono a lungo nel
tempo. La spola a pistone può muoversi molto facilmente. Nelle valvole di controllo di direzione senza molla di ritorno la resistenza d‘attrito
viene incrementata dagli anelli di tenuta. Queste serve a prevenire
un‘azionamento indesiderato delle valvole.
I costi di fabbricazione delle valvole a controllo di direzione con spola
in acciaio sono maggiori, a causa della loro accurata fabbricazione.
L‘otturatore di metallo permette all‘aria compressa di passare nella
connessione bloccata.
2 (A)
3 (R)
1 (P)
Figura 24:
1 (P)
3 (R)
valvole a spola (immagine di: BoschRexroth)
41
Minos
Tecnica pneumatica
Le valvole a spola con anelli elastici di tenuta vengono utilizzati frequentemente. Questi vanno lubrificate con il grasso e necessitano d‘aria
compressa senza olio.
Le impurità all‘interno dell‘aria compressa causano il deterioramento
degli anelli. L‘utilizzo dell‘aria compressa deve adempiere alle specificità necessarie alle valvole di direzione. L´aria compressa che contiene
polvere diminuisce la vita operativa delle valvole a direzione moderne.
Le valvole a spola non hanno intersezioni per via della loro morfologia
costruttiva. Il carrello deve coprire una corsa relativamente lunga per aprire o bloccare le connessioni. Attraverso un‘attività lenta le connessioni
possono essere sbloccate soltanto in modo graduale.
Le forze operative per le valvole a spola sono molto piccole e indipendenti dalla pressione. Nelle valvole che dispongono della molla di ritorno
la loro forza deve prevalere prima di tutto sulla forza elastica. In altre
valvole invece, che non possiedono la molla, soltanto la forza di attrito
deve essere superata.
L‘intercambiabilità delle connessioni nelle valvole a spola consente che
esse siano utilizzate in posizione di blocco o in posizione di passaggio.
1.6.5
Tipi di costruzione delle valvole a controllo di direzione
Le valvole a controllo di direzione vengono contrassegnate dal numero
di connessione e dal numero delle posizioni di commutazione. Il tipo più
semplice è la valvola di controllo di direzione 2/2.
Queste valvole di solito si arrestano in posizione di riposo. Attraverso la
loro attività il flusso d‘aria passa dalla connessione di entrata a quella
d‘uscita. Il ritorno alla posizione di partenza avviene per mezzo di una
molla. La maggior parte delle valvole di controllo di direzione 2/2 sono
valvole a sede sferica o piana.
Le valvole con sede lavorano come le valvole di controllo in posizione di
riposo, ed è per questo che a volte viene utilizzato il simbolo nel riquadro
della posizione bloccata invece che bloccare entrambe le connessioni.
Le valvole di controllo di direzione di tipo 3/2 operano su cilindri a semplice effetto. Quando la valvola è bloccata, quindi in posizione di riposo,
il cilindro a semplice effetto si trova in posizione di partenza. L‘attività
delle valvole di controllo di direzione permette all‘aria compressa di fluire
e di muovere il cilindro. Quando le valvole di tipo 3/2 vengono disattivate
l‘aria compressa rifluisce dal cilindro verso le valvole, e infine fuoriesce
passando attraverso il foro di ventilazione.
42
Tecnica pneumatica
Minos
Le valvole di tipo 3/2 vengono utilizzate spesso come elementi per trasmettere segnali. In questo caso l‘aria compressa agisce sul controllo
d‘aria di una valvola pneumatica di direzione, invece che su di un cilindro. Questo permette alle valvole di tipo 3/2, di piccole dimensioni, di
azionare valvole a controllo di direzione di dimensioni maggiori. Questo
tipo di valvole possono essere collocate distanti dalle valvole principali.
Le tubazioni sulle connessioni di controllo dell‘aria, delle valvole principali,
vengono indicate come tubazioni di controllo. Nei diagrammi vengono
rappresentate con una linea tratteggiata. Esse non devono essere più
lunghe di 10 metri.
Le valvole a controllo di direzione 3/2 sono disponibili come valvole con
sede o a bobina. Una costruzione speciale è la valvola a bobina manuale,
che può essere usata per azionare l‘aria compressa. Per questo viene
usato un manicotto che può essere spostato su una valvola. A seconda
della posizione di commutazione le connessioni comunicano tra di loro,
attraverso un condotto di scarico, oppure la connessione dell‘aria compressa è bloccata e l‘altra connessione viene aperta alla circostante area.
3 (R)
1 (P)
Figura 25:
2 (A)
valvola a bobina manuale (immagine di: BoschRexroth)
43
Minos
Tecnica pneumatica
Per poter operare su cilindri ad effetto doppio con due connessioni d‘aria
compressa sono necessarie due valvole di controllo di direzione con due
connessioni operative. Nelle valvole di controllo di tipo 4/2, una delle due
connessioni d‘uscita è la pressione diretta. La pressione viene applicata
sulla seconda uscita quando la valvola di controllo viene spostata sull‘altra
posizione.
Le valvole del tipo 4/2 hanno un solo foro di ventilazione comune. Queste
di solito sono le valvole con sede. Esse rappresentano in generale una
combinazione di due valvole del tipo 3/2, una con la posizione di blocco
inattiva e l‘altra in posizione di riposo. Le valvole di controllo di direzione
4/2 sono provviste di interruttori simultanei su entrambe le valvole.
È chiaro che un cilindro a effetto doppio può funzionare anche usando
due controlli di valvole di direzione del tipo 3/2. Quando entrambe le
valvole a controllo di direzione vengono azionate simultaneamente, esse
operano su di un cilindro ad effetto doppio come le valvole a controllo di
direzione del tipo 4/2.
Ad ogni modo, ci sono due ulteriori connessioni possibili quando si impiega con un cilindro ad effetto doppio, usando due valvole di controllo
di direzione 3/2. Si applica la pressione a ciascuna delle due valvole di
direzione 3/2, che aziona lo spostamento del cilindro a doppio effetto con
una forza di piccola entità dovuta alla differente superficie dei pistoni.
Figura 26:
44
2 (B)
4 (A)
1 (P)
3 (R)
3 (R)
1 (P)
valvole a controllo di direzione 4/2 (immagine di: BoschRexroth)
Tecnica pneumatica
Minos
Oppure entrambe le valvole 3/2 vengono commutate senza pressione. In
questo caso il cilindro può muoversi liberamente. Questo procedimento
viene usato anche in alcuni tipi speciali di connessione.
Le valvole a controllo di direzione pneumatica 4/2 hanno spesso la costruzione di una valvola con sede. Esse non vengono usate quasi mai nella
pneumatica a causa della rilevante forza di azionamento che richiedono.
Nella pneumatica, si azionano di solito cilindri a doppio effetto per mezzo
delle valvole di controllo di direzione 5/2. Queste sono valvole a bobina
con due connessioni di adduzione dell‘aria. In molte di queste valvole
l‘aria di scarico di ognuna delle connessioni di adduzione dell‘aria può
essere azionata separatamente.
Le valvole 5/2, così come altri tipi, possono essere riportate alla posizione
di partenza attraverso una molla. Queste valvole vengono chiamate anche
valvole di controllo di direzione monostabili. Ma vi sono anche alcuni tipi
in grado di mantenere tutte e due le posizioni di commutazione. Nella
pneumatica, queste valvole sono chiamate valvole ad impulso, perchè
il loro azionamento viene eseguito da un breve impulso su di una delle
due connessione di controllo.
Le valvole ad impulso non hanno una vera e propria posizione di riposo.
Esse mantengono la posizione ultima durante il loro utilizzo. Per questo
vengono chiamate anche memorie pneumatiche.
14
Figura 27:
5
4
1
2
3
12
valvole a controllo di direzione 5/2 (immagine di: BoschRexroth)
45
Minos
Tecnica pneumatica
Le valvole a controllo di direzione con molla di ritorno di tipo 5/2 e le valvole ad impulso, sono anche usate nell‘elettropneumatica. Queste valvole
possiedono uno o due solenoidi, e per questo sono anche più costose.
Siccome la funzione di immagazzinaggio di segnali, nei sistemi di controllo
elettropneumatici, viene svolto in prevalenza dal circuito elettronico del
sistema, si privilegiano le valvole di controllo di direzione con molla di
ritorno. Le valvole ad impulso vengono usate soltanto se la valvola deve
mantere la sua posizione in mancanza di energia. Questo è necessario,
ad esempio, se si utilizza un cilindro per bloccare un pezzo in lavorazione.
Il problema della sovrapposizione di segnale si riscontra anche nelle
valvole ad impulso, che operano sui sistemi elettronici. Questo deve
essere preso in considerazione durante la costruzione di sistemi di controllo elettrici.
Le valvole di controllo 5/3, a differenza delle 5/2, possiedono una ulteriore
posizione di commutazione, ovvero la posizione intermedia. Le valvole di
controllo operanti sui sistemi pneumatici ed elettrici, del tipo 5/3, si spostano sulla posizione intermedia attraverso l´attivazione delle due molle.
Il fermo su una sola posizione di commutazione è possibile solo con una
valvola a controllo direzionale del tipo 5/3 a leva.
14
Figura 28:
46
5
4
1
2
3
12
valvole a controllo di direzione 5/3 (immagine di: BoschRexroth)
Tecnica pneumatica
Minos
La memorizzazione dei segnali nelle valvole ad impulso è molto importante in moltissimi sistemi pneumatici di controllo. Pertanto, le valvole ad
impulso non sono solo impiegate per l‘azionamento diretto dei cilindri ,
ma anche negli stessi sistemi di controllo. Poichè i sistemi di controllo,
di solito operano con piccole portate, per essi, in generale, s‘impiegano
valvole ad impulso di piccole dimensioni.
Quando la commutazione dell‘aria viene aperta, la valvola ad impulso
può trovarsi in una posizione che provoca lo spostamento immediato
del cilindro. Perciò può essere necessario, specialmente in sistemi di
controllo di rilevanti dimensioni, mandare una serie di impulsi alla valvola
per portarla nella richiesta posizione di partenza dopo aver inviato l‘aria
compressa ai cilindri.
Nelle valvole ad impulso entrambe le superfici dei pistoni nelle connessioni di controllo dell‘aria sono uguali. Perciò in essa l‘applicazione di
un segnale di controllo ad entrambe le connessioni d‘aria può causare
problemi. In questo caso la valvola ad impulso può rilevarsi impossibilitata
di commutare la posizione.
La sistuazione che si verifica quando il segnale viene inviato ad entrambe
le connessioni d‘aria in una valvola ad impulso viene definita sovrapposizione di segnale. Questa condizione può essere evitata mediante un
opportuno controllo. In ogni modo vengono impiegate valvole ad impulso
con area dei pistoni leggermente diverse sulla connessione di controllo
dell‘aria.
In questo caso il segnale applicato alla connessione con area del pistone
maggiore ha una priorità maggiore. Le valvole ad impulso con aree disuguali dei pistoni sulle connessioni di controllo dell‘aria vengono definite
valvole differenziali. Tali valvole si adoperani di solito solo come valvole
pneumatiche comandate ad impulsi.
Bisogna considerare che nelle valvole pneumatiche a controllo direzionale che impiegano una molla di riposizionamento, la pressione nelle
connessioni di controllo dell‘aria dovrebbe essere sufficientemente alta
per spostare il cursore superando la resistenza della molla.
Nelle valvole a controllo direzionale 5/2 la pressione viene applicata ad
una delle due connessioni. Se il cilindro nella posizione di partenza deve
essere ulteriormente spostato, è sufficiente scambiare le due posizioni
operative. Pertanto le valvole a controllo direzionale di tipo 5/2 non
vengono chiarificate in base alla posizione di riposo (posizione di riposo
bloccata e posizione di riposo aperta).
Le valvole a controllo direzionale 5/2 possono anche essere usate per
azionare i cilindri a semplice effetto. IN questo caso una delle connessioni
di uscita della valvola è chiusa da un tappo cieco e l‘altra è collegata al
cilindro. Questa soluzione può essere adottata per sostituire una valvola
direzionale di tipo 3/2.
47
Minos
Tecnica pneumatica
Tutte e due le posizioni esterne, nelle valvole di controllo di direzione
5/3, hanno la stessa funzione di quelle 5/2. Le posizioni intermedie vengono usate ad esempio per poter chiudere la pressione di entrambe le
connessioni in modo da arrestare i cilindri.
Generalmente si trovano tre posizioni intermedie differenti, nelle valvole
di controllo 5/3. La posizione intermedia di blocco viene usata più frequentemente, mentre tutte e cinque le connessioni sono bloccate l’una
con l’altra. Questo rende possibile l’arresto del cilindro durante la sua
corsa, tra tutte e due le posizioni.
Un‘altra posizione intermedia unisce le connessioni operative con quelle di
ventilazione. In questo caso non viene applicata la pressione sul cilindro,
in grado di muoversi liberamente.
La terza posizione applica in modo simultaneo la pressione completa
su entrambe le connessioni. In questo caso un cilindro normale con un
pistone a stelo riesce a funzionare con l’applicazione di una leggera forza.
Cilindri con uguali superfici dei pistoni, come ad esempio i cilindri a banda
o i cilindri con lo stelo che agisce attraverso il pistone, non si muovono
poichè la pressione è applicata ad entrambe le camere.
In molte serie di costrzttive vengono prodotte soltanto le valvole del tipo
5/3 con la posizione di blocco intermedia. Le altre due posizioni intermedie
vengono realizzate di solito con le valvole del tipo 3/2.
Figura 29:
48
posizioni intermedie delle valvole 5/3
Tecnica pneumatica
1.6.6
Minos
Controllo pilota per le valvole a controllo di direzione
Valvole di grandi dimensioni necessitano anche di grandi forze per
l‘azionamento. Il controllo pilota permette a queste valvole di operare
normalmente e di garantire il loro corretto funzionamento, attraverso
l’amplificazione della forza.
È possibile trovare il controllo pilota anche nelle valvole meccaniche di
controllo di direzione, ma viene usato maggiormente nelle valvole ad
azionamento elettrico, perchè capaci di lavorare utilizzando piccoli solenoidi. Essi infatti consumano meno energia e producono meno energia
di residuo.
Il controllo pilota è una piccola valvola di controllo di direzione del tipo
3/2. Essa è collegata direttamente con la connessione di controllo d’aria
compressa della valvola principale. La messa in moto della valvola di
controllo pilota applica la pressione sulla valvola principale, cambiandone
la sua posizione.
L’aria compressa necessaria per le valvole di controllo pilota, viene
erogata attraverso un piccolo condotto, che si dirama dalla connessione
d’aria compressa della valvola principale. Perciò, l’attivazione di questa
valvola è possibile soltanto applicando la pressione alla connessione
d’aria compressa.
2 (B)
3 (S)
Figura 30:
4 (A)
1 (P)
5 (R)
valvola a controllo di direzione con controllo pilota (immagine di: BoschRexroth)
49
Minos
Tecnica pneumatica
Le valvole, che ricevono l’energia dalla connessione d’aria compressa
della valvola principale, sono chiamate valvole di autocontrollo. Utilizzando queste valvole è impossibile applicare una piccola pressione,
oppure il vuoto, sulla valvola principale, perchè una minima pressione è
necessaria alla connessione di controllo d’aria per assicurarne il corretto
azionamento.
Nelle valvole a controllo di direzione, controllate dall‘esterno, il controllo
pilota eroga area compressa da una fonte esterna, così da permettere
che la fuoriscita della pressione sia indipendente dalla pressione della
valvola principale. Perciò, la valvola può essere azionata anche, quando
la pressione non viene applicata dalla valvola principale. E‘ possibile la
applicazione di una piccola pressione o di un vuoto.
Un piccolo trattino sul simbolo del controllo pilota delle valvole, indica
che la pressione viene erogata da una fonte esterna.
Ad ogni modo, le valvole ad auto controllo, sono usate frequentemente.
In molte serie costruttive è possibile la ricostruzione del sistema che fornisce pressione al controllo pilota. Tale ricostruzione però deve essere
ben documentata, in maniera da permettere una corretta sostituzione
delle valvole.
14
4
5
Figura 31:
50
2
1
3
valvole esterne a controllo di direzione (immagine di: BoschRexroth)
Tecnica pneumatica
1.6.7
Minos
Unità terminali delle valvole
Ci sono due possibilità, per il posizionamento delle valvole di controllo
all‘interno di un sistema. Da una parte, le valvole di controllo vengono collocate vicino ai cilindri, in modo da ridurre la lunghezza della connessione.
Le condutture più corte permettono il risparmio dell‘aria compressa, nella
azione di svuotamento e riempimento.
Dall‘altra invece le valvole a controllo di direzione vengono posizionate
in posizione centrale all‘interno di un sistema. Questo viene fatto per
una migliore manutenzione di esse ed un miglior controllo degli errori.
Ma per questo occorreranno condutture molto lunghe per connettere le
valvole ai cilindri.
I cilindri vengono montati prima su un terminale d‘assemblaggio, sul
quale sono già predisposte le connessioni dell‘aria compressa e dell‘aria
di scarico. Il terminale possiede un supporto comune d‘aria compressa e
una connessione comune d‘aria di scarico fornita di silenziatore.
I conduttori elettrici dei solenoidi sono connessi ad un unico distributore,
che è connesso a sua volta, attraverso un conduttore multiplo, con una
centralina.
Foto 32:
Sistema terminale delle valvole
51
Minos
Tecnica pneumatica
Il terminale rende possibile l‘utilizzo di una sola alimentazione di aria
compressa per più valvole. Inoltre si risparmia tempo, circa il montaggio,
e le valvole possono essere sostituite in maniera semplice.
Se è necessaria l‘espansione del terminale, in modo da permettere la
connessione di più valvole, è possibile collegare ulteriori connessioni al
terminale. Gli attacchi vuoti vengono sigillati mediante piattine
Le valvole vengono generalmente ordinate, secondo il sistema terminale,
in valvole con attacco a tubo e con attacco flangiabile. Le valvole con
attacco flangiabile hanno tutte le loro connessioni dirette verso il basso.
Esse possono essere smontate senza disconnettere i tubi e le condutture.
Le valvole con gli attacchi a tubo hanno le loro connessioni rivolte verso
l‘alto. Prima di essere smontate entrambe le connessioni devono essere liberate e riconnesse in un secondo momento. Poichè, nella valvola
con attacco a tubo, l‘aria compressa non viene disturbata, essa ha una
portata maggiore di quella delle valvole con attacco con flange della
stessa misura.
Foto 33:
52
terminale con le valvole con attacco flangiabile
Tecnica pneumatica
Minos
Nei sistemi terminali moderni non vengono integrate soltanto connessioni d‘aria compressa, ma anche le connessioni elettriche dei solenoidi.
Questo riduce il tempo d‘istallazione e di smontaggio.
Nei terminali, i contatti dei solenoidi vengono connessi con cavi multipolari. Il terminale delle valvole può essere connesso facilmente con una
centralina utilizzando un conduttore multipolare.
Ia connessione del cavo multipolare può essere sostituita da un sistema
bus di connessione. Questo permette di connettere il terminale direttamente con SPS via segnale digitale.
Il terminale delle valvole può essere classificato per differenti valori di
pressione. L‘alimentazione dell‘aria compressa può essere bloccato per
mezzo di separatori. Queste permette di applicare pressioni differenti a
ciascun lato del terminale.
Nei terminali che possiedono tre livelli di pressione deve essere installata,
una piastradi alimentazione al posto di una valvola di livello intermedio.
Questo permettedi alimentare la pressione dal lato superiore. Le piastre
di supporto vengono usate anche quando una grande quantità d‘aria
compressa deve essere applicata allo stesso tempo al terminale delle
valvole o quando l‘aria di scarico deve fuoriscire più velocemente.
Foto 34:
terminale con le valvole con connessione a tubo
53
Minos
1.7
Tecnica pneumatica
Le valvole di blocco
Le valvole di blocco vengono utilizzate per arrestare il flusso in una direzione, per dirigerlo verso un‘altra direzione. Raramente queste valvole
vengono combinate insieme ad altre.
1.7.1
Valvole di ritegno
Una valvola di ritegno (non-return valve) è composta da un corpo che
viene premuto verso il centro attraverso una molla. Queste valvole si
arrestano in mancanza di pressione. Una valvola di ritegno di tipo semplice possiede due connessioni e l‘aria compressa può passare soltanto
in una direzione.
Tuttavia ci sono anche valvole di ritegno di tipo sbloccabile. Esse predispongono di una terza connessione per il controllo d‘aria, alla quale,
se viene applicata la pressionele valvole di ritegno si spostano nella
direzione di blocco.
Le valvole di ritegno sbloccabili possono essere utilizzate ad esempio per
prevenire l‘improvviso movimento di un cilindro a carico in caso di guasto
nelle condutture. Per poter connettere le valvole di ritegno sbloccabili ai
cilindri, senza l‘ausilio di condutture, vengono utilizzate giunture speciali.
Il cilindro può correre soltanto quando viene applicato un segnale sulla
connessione di controllo d‘aria.
1.7.2
Valvole di scappamento rapido
Le valvole di scappamento rapido vengono utilizzate per aumentare la
velocità del cilindro e del pistone. Esse devono essere collocate il più
vicino possibile ai cilindri. Esse danno il loro massimo quando vengono
avvitate direttamente sulla connessione cilindri.
Quando l‘aria compressa arriva ai cilindri, „leak-proof element“ chiude
il foro di ventilazione e l‘aria passa attraverso l‘uscita. Durante la ventilazione del cilindro „the leak-proof element“ viene spostato su un‘altra
posizione. Il foro di ventilazione è aperto e l‘aria compressa passa dal
cilindro verso l‘esterno attraverso il foro di ventilazione delle valvole di
scappamento rapido.
Poichè l‘aria compressa non deve passare più attraverso le valvole di
controllo di direzione permette al cilindro di lavorare in maniera più veloce
aumentandone la velocità del suo pistone.
Lo scappamento rapido dell‘aria produce un rumore sottile. Il problema
è risolvibile istallando un silenziatore.
54
Tecnica pneumatica
1.7.3
Minos
Valvole di ritegno alternate
Una valvola di ritegno alternata possiede due connessioni di entrata
equivalenti e una connessione d‘uscita. Esse vengono usate per la combinazione logica del segnale.
Se viene applicata la pressione su di una di queste entrate essa arriva
fino alla connessione d‘uscita. L‘altra connessione d‘entrata vieneviene
bloccata da un „leak-proof body“, in modo che la pressione non fuoriesca
dalla seconda entrata.
Quando la pressione viene applicata su tutte e due l‘entrate simultaneamente, lo stato del „leak-proof body“ è indefinito. Questo condotta
corrisponde ad una funzione logica OR.
Se venissero applicate due pressione differenti nelle connessioni di
entrata, sarà la pressione più grande ad essere apllicata all‘uscita. È
possibile connettere insieme più valvole di ritegno, in modo da poter
combinare diversi segnali.
Queste valvole non dispongono di un foro di ventilazione. Una volta
spento il segnale la pressione deve essere rilasciata attraverso le valvole
di controllo di direzione.
2 (A)
1 (P)
Figura 35:
3 (R)
valvole di scappamento rapido (immagine di: BoschRexroth)
55
Tecnica pneumatica
Minos
1.7.4
Valvole a pressione doppia
Le valvole a pressione doppia possiedono due connessioni d‘entrata,
equivalenti tra loro, ed una d‘uscita. Anch‘esse, come le valvole di ritegno
alternate, vengono usate per la combinazione dei segnali.
Applicando la pressione su di una delle due entrate, essa preme „the
leak-proof body“ verso la superficie „sealing“ e blocca la valvola. Se il
segnale (la pressione) viene applicata sull‘altra connessione la valvola
bloccherà l‘altra entrata.
Soltanto apllicando simultaneamente la pressione su tutte e due l‘entrate,
la pressione raggiungerà l‘uscita. Questo processo viene definito funzione
AND.
La funzione AND non rappresenta una funzione sicura. Quindi è necessario l‘ausilio di un „two-hand safety“, dove due bottoni devono essere
premetu a distanza di mezzo secondo.
Le valvole a pressione doppia possono essere usate soltanto per le
combinazioni logiche di segnale.
2 (A)
1 (E 1 )
Figura 36:
56
valvola di ritegno alternata (immagine di: BoschRexroth)
1 (E 2 )
Tecnica pneumatica
Minos
Se vengono applicate due pressioni di valore differente, sulle valvole a
pressione doppia, soltanto la pressione minore verrà applicata all‘uscita.
Questo potrebbe essere un problema quando vengono combiati insieme
più segnali.
Quindi è necessario ricorrere all‘utilizzo delle valvole pneumatiche di
controllo di direzione 3/2, per combinare i segnali a pressione differente. Il
segnale più piccolo viene utilizzato per spostare sulla valvola di controllo
di direzione, quello più grande viene applicato sull‘uscita di queste.
Quando si utilizzano le valvole a pressione doppia per operare sulle valvole ad impulso, una pressione bassa è sufficiente per per poter azionare
le valvole ad impulso. In questo caso devono essere utilizzate valvole a
doppia pressione con interruttori piccoli e veloci.
2 (A)
1 (E1)
Figura 37:
1 (E1)
valvole a pressione doppia (immagine di: BoschRexroth)
57
Tecnica pneumatica
Minos
1.8
Flow valves
The flow valves control the volume flow and consequently the speed of
pneumatic drives. In a choke the section area decreases continuously.
This allows to decrease the flow continuously in a simple way, which is
considered advantageous in the pneumatics.
Chokes have two connections. They can be installed inside the pipelines
or screwed directly in the threaded holes of the valves. Chokes have the
same working in both flow directions.
In directional control valves with two separated exhaust air holes two
chokes can affect the exhaust flows separately. This allows to adjust the
cylinders speed individually in each direction. In many directional control
valves the chokes are installed permanently in the exhaust air holes.
A choke is represented with a rectangle. Two curved lines symbolize the
narrowed area. An arrow on the symbol means that the choke is adjustable.
1 (A)
Bild 38:
58
Drosselrückschlagventil (Bild: BoschRexroth)
2 (B)
Tecnica pneumatica
1.8.1
Minos
Check choke valves
The chokes must be placed as close as possible to the cylinder, otherwise
the pipelines will act as additional volume. Especially suitable is to
screw the chokes directly in the compressed air connections of the cylinder. A check valve is installed parallel to the choke in order to make it
work in one direction only.
In a check choke valve the volume flow is throttled in the blocking direction
of the check valve. In the other direction the check valve is open and
the compressed air can pass through the check choke valve without
throttling.
The symbols of a choke and a check valve are surrounded with a dashpoint line. This indicates that both components represent one structural
unit. The throttling direction is usually from connection 1 to connection 2.
There are two principle methods for throttling. The incoming air throttling
means that the compressed air that flows into the cylinder is throttled. A
slip-stick effect can appear at slow motion speeds. This means that the
cylinder runs out a little then stops until enough compressed air flows in
again.
Because of this irregular motion the incoming air throttling should be
used only with very small cylinders and single-action cylinders. The returnspring in these cylinders damps the jerks.
The outgoing air throttling is the throttling of the compressed air that
flows out of the cylinder. Since full pressure is applied to the other piston
side the piston is pneumatically fixed. This makes the cylinders motion
considerably smoother.
Because of this smooth motion the outgoing air throttling should be used
as far as possible. Only very small cylinders with short strokes doesn’t
have enough pressure buildup for throttling at the ventilation side.
When installing screw-in constructions of check choke valves the throttling
direction must match the desired throttling type. In order to avoid
any possibility of confusion, different constructions for incoming and
outgoin gair throttling are available.
Check choke valves for Incoming and outgoing air throttling should be
never used together at both compressed air connections of a doubleaction
cylinder. In this case both chokes will work in the same direction
while the other direction will be without throttling.
59
Minos
1.9
Tecnica pneumatica
Valvole di pressione
Le valvole di pressione influenzano la pressione e di consequenza la forza
dei pneumatici. Una delle valvole di pressione, che può essere trovata in
ogni unita di mantenimento, e la valvola di controllo di pressione. Questa
valvola permette di modificare la pressione dell intero sistema.
Se qualche parte del sistema richiede una pressione minore allora e possibile usare le valvole di pressione. In effetti esse sono valvole di riduzione
della pressione. Esse hanno bisogno di una determinata pressione che
viene ridotta e applicata all uscita.
Le valvole di riduzione di pressione vengono utilizzate anche nella pneumatica come valvole di risparmio energetico. Specialmente nei cilindri a
effetto doppio, che possiedono un largo volume, non e sempre necessario generare una forza completa in entrambe le direzioni.Nella maggior
parte dei casi il cilindro ha bisogno di fuoriuscire con una grande forza ,
mentre per il suo rientro (corsa di ritorno) e necessaria una forza minore.
In questo caso, la pressione utilizzata per la corsa di ritorno viene ridotto
delle valvole di risparmio energetico. Poiche il cilindro viene riempito
con aria compressa a bassa pressione il consumo e di conseguenza
piu basso. Ad ogni modo le valvole di riduzione di pressione possono
passare soltanto in una direzione, percio una valvola di ritegno parallela
deve essere installata per passare il flusso in direzione opposta.
Le valvole di limite di pressione vengono usate nella pneumatica prima di
tutto usate come valvole di sicurezza ...“at containers“.Esse normalmente
sono chiuse, si aprono soltanto quando viene raggiunta la giusta pressione. Le valvole di protezione rilasciano la pressione nell‘area circostante.
Le valvole di regolazione di pressione di sequenza hanno un simile
funzionamento. Esse sono valvole di controllo di direzione che cambiano soltanto quando viene applicata una determinata pressione.Questa
pressione, necessassaria per la loro attivazione, puo essere installata
da una molla regolabile.
Le valvole di pressione di sequenza possono eesere usate, ad esempio,
per controllare la pressione all interno di un cilindro. La forza richiesta si
puo ottenere da un cilindro soltanto quando la pressione e abbastanza
alta. Percio, il cilindro puo compiere il suo rientro soltanto dopo che viene
generata la forza necessaria.
Nell elettropneumatica questa funzione viene eseguita dai regolatori di
pressione. La forza agisce su di un diaframma, il quale preme una molla
regolabile. Quando la pressione viene raggiunta il diaframma attiva un
piccolo contatto che produce un segnale elettrico.Percio i regolatori di
pressione vengono chiamati anche: convertitori P/E.
60
Tecnica pneumatica
1.10
Minos
Altri tipi di valvole
Gli elementi di tempo vengono usati con i sistemi di controllo dipendenti
dal tempo (time-dependent). Un elemento di tempo in un controllo di
sistema pneumatico assoluto consiste in una valvola di ritegno choke,
un controllo di direzione 3/2 ed un piccolo serbatoio/contenitore. Dal
momento che questi componenti vengono combinati in una unità, i loro
simboli saranno indicati con una linea tratteggiata (dash-doted line).
Quando la pressione è applicata alla connessione di controllo d‘aria,
l‘aria compressa strozzata passa nel contenitore. La valvola di controllo
di direzione cambia dopo che la pressione ha raggiunto un determinato
valore e l‘elemento di tempo genera un segnale all‘uscita.
L‘elemento di tempo può essere usato anche per spegnere i segnali. La
valvola di direzione, in questo caso, viene usata in posizione di arresto
di passaggio. Dopo lo scadere del tempo, regolato in precedenza, la valvola di controllo spegne la connessione tra la porta dell‘aria compressa
e l‘uscita.
Il tempo può essere modificato con il choke. È possibile regolare periodi
di tempo di circa 30 secondi. ÈPossibile attaccare un manometro alla vite
di connessione del contenitore, questo permette di osservare l‘icremento
della pressione. Questo è molto sensato per quanto riguarda la partenza
e il controllo degli errori.
12 (Z)
Figura 38:
1 (P) 2 (A) 3 (R)
3 (R)
1 (P)
elementi di tempo (immagine di: BoschRexroth)
61
Minos
Tecnica pneumatica
Gli elementi di tempo pneumatici non sono di precisione ottimale. Quando si necessita di alta precisione e per lavorare per un lungo periodo di
tempo, essi non dovrebbero essere usati. Questi elementi dispongono un
sistema a rotore meccanico. Una volta trascorso un determinato periodo
di tempo, questi elementi iniziano a generare impulsi d‘aria compressa.
Il tempo può essere osservato attraverso un apposito disply analogico.
I contatori pneumatici hanno un principio di lavorazione molto simile.
Gli impulsi pneumatici vengono addizionati insieme e poi mostrati sul
contatore meccanico.
Nell‘elettropneumatica il controllo del tempo avviene attraverso dei relè.
D‘altra parte, però, quando si usano degli SPS, il periodo di tempo ed il
conteggio viene determinato dal sistema di controllo.
Molti sistemi di controllo, come le presse, sono pericolosi per l‘uomo.
Quindi è necessario l‘utilizzo di „two-hand protection“.
Per questo bisogna premere due bottoni, uno dopo l‘altro, a distanza di
0,5 secondo. Questi bottoni devono essere premuti fino alla fine, e per
non rischiare di premeri i due bottoni contemporaneamnete, occorrerà
posizionarli a distanza di sicurezza l‘uno dall‘altro.
Poichè gli „elementi di tempo“ sono molto sensibili alla polvere e
al‘eccesso d‘olio nell‘area compressa, non è possibile garantire operazioni senza errori.Quindi le protezioni „two-hand“ non sono sufficienti per
garantire un corretto procedimento.
Tuttavia la combinazione logica dei segnali dei bottoni è ancora possibile.
Nell‘elettropneumatica la combinazione logica viene eseguita di solito
nella parte elettrica del sistema di controllo, oppure nella SPS.
Questo vale anche per l‘indice pneumatico a catena, che veniva adoperato per operazioni di sistema di controllo sequenziale. In questi sistemi
le uscite venivano azionate una ad una. Ancora oggi è possibile trovare
questi vecchi sistemi di controllo.
62
Tecnica pneumatica
1.11
Minos
Denominazione dei simboli in un diagramma
Ogni elemento pneumatico corrisponde ad un simbolo all´interno di un
diagramma. Il supporto dell´aria compressa è situato nella parte inferiore del diagramma ed il cilindro nella parte superiore. I cilindri devono
protendersi verso destra.
Tutti gli elementi devono trovarsi in uno stato di „pressione applicata“. I
cilindri che hanno una posizione di partenza estesa vengono rappresentati
in stato di espansione.
I pulsanti e le valvole che operano sui cilindri devono essere collocati nella
parte inferiore del diagramma, in quanto la direzione del loro segnale si
muove dal basso verso l´alto. Gli interruttori dei cilindri vengono rappresentati da trattini molto piccoli collocati al di sopra dei simboli raffiguranti
i cilindri.
L`etichette e le indicazioni di ogni singolo componente sono definite nella
DIN 1219-2. Essa utilizza numeri per definire il circuito del diagramma,
e lettere per l´identificazione ed il numero dei componenti.
Le lettere riportate qui riportate vengono usate per i componenti singoli:
A
S
V
Z
Actuators (attuatori)
Signal sensor (sensori di segnale)
Valves (valvole)
altri componenti
Gli attuatori vengono numerati da sinistra a destra: 1A, 2A, 3A etc.
Tutte le valvole che appartengono al primo cilindro vengono numerate
dal basso verso l´alto e da sinistra a destra: 1V1, 1V2, 1V3 etc. Così,
in maniera conforme, per quanto riguarda il secondo cilindro: 2V1, 2V2,
2V3 etc.
The Follower rolls adoperano lo stesso numero che utilizza il cilindro al
quale essi vengono fissati. Essi vengono indicati con 1S1, 1S2, 1V3 etc.
mentre per il secondo cilindro 2S1 e 2S2.
È il cilindro a determinarne la loro denominazione. In altre sistemi di
etichettatura essi vengono identificati con i cilindri che operano sul loro
segnale d uscita.
Poichè le componenti di unità di mantenimento ed i supporti d`aria
compressa non possono venir associati con un determinato cilindro,
essi vengono preceduti da uno 0. Facendo parte della categoria Z (altri
componenti), questa unità, ad esempio, può essere indicata così: 0Z1.
63
Tecnica pneumatica
Minos
In altri tempi venivano usati altri tipi diagrammi o gestori di etichette. È
possibile, ad esempio, numerare componenti in ordine di serie.
I cilindri vengono designati spesso con Z1, Z2 etc. Altri componenti che
appartengono ai cilindri vengono indicati da due cifre separate da un
punto.
Tutti i componenti che a loro volta appartengono al primo cilindro vengono
etichettati con 1.1, 1.2, 1.3 etc. Inoltre la numerazione viene eseguita
anche dal basso verso l‘alto, e da sinistra verso destra. La servo valvola, che rifornisce il cilindro d‘aria compressa, può essere specialmente
„pointed out“. Essa può essere indicata con 1.1 per il primo cilindro indipendentemente dalla sua posizione nel diagramma.
I componenti che servono a fornire di energia un sistema, vengono indicati
con 0.1, 0.2, 0.3 etc. L‘ordine di numerazione corrisponde alla direzione
del flusso di energia.
La denominizione degli interruttori dei cilindri e la loro posizione deve
essere presa in considerazione, indipendentemente dal sistema di gestione etichette, in modo da garantirne un‘accurata categorizzazione.
1A
1S2
1V2 1
1V3 1
2
2
1V1
4
2
12
14
5
1S1
0Z1
Figura 39:
64
1
1
3
1S2
2
3
Numerazione dei componenti in un diagramma
2
1
3
Tecnica pneumatica
1.12
Minos
Tecnica del vuoto
Le ventose vengono usate per il trasporto di differenti pezzi da lavoro.
Esse possono trasportare pezzi da lavoro dalla superficie liscia, piana e
dura. I pezzi non devono essere permeabili all‘aria.
Le ventose servono per trasportare pezzi difficili da „afferrare“ meccanicamente, come „car glass, pezzi di carta in printing plants“.
Le ventose lavorano con pressione negativa. Poichè la pressione atmosferica sulla superficie terrestre è di circa un Bar, la pressione negativa
massima aumenta teoricamente anche di un Bar. In pratica, la pressione
negativa è di circa 0,6 e 0,8 Bar. Essa può essere rappresentata anche
in percentuale, quindi 60% e 80%.
Un pezzo di lavoro può aderire alla ventosa soltanto se la pressione
dell‘aria circostante è più alta della pressione tra la superficie e la ventosa.
La forza che sostiene il pezzo di lavoro varia a seconda del valore della
pressione negativa e della superficie efficiente dell‘area della ventosa.
„Neps“ sono applicate sulle ventose in modo da prevenire che esse non si
attacchino in maniera radente al pezzo di lavoro, il quale ne diminuirebbe
la superficie . Questo provaca facilmente anche l´allentamento del pezzo
di lavoro dopo aver spento la pressione negativa.
La forza della ventosa deve essere per lo meno due volte superiore a
quella necessaria. Alla alta accelerazione di un pezzo di lavoro saranno
necessarie misure di sicurezza.
Le ventose possono suddividersi in piane e telescopiche. Le prime sono
più adatte per lavorare su superfici verticali, in quanto meno flessibili di
quelle telescopiche, che invece sono più adatte a lavorare su superfici
smussate.
Quando si utilizzano le ventose telescopiche, attraverso l‘azionamento
della pressione negativa, può verificarsi il cosi chiamato „effetto-lifting“,
dovuto dalla contrazione della parte telescopica. Durch das anheben
kann somit möglicherweise auf eine zusätzliche Hubbewegung verzichtet
werden.
Con l‘azione di più ventose connesse in modo parallelo tra loro, si corre
il rischio di rottura di una queste, che potrebbe provocare il fallimento
dell‘intera pressione negativa e del distacco del pezzo di lavoro. In questo caso si possono usare valvole di flusso, che si bloccano attraverso
forti flussi.
Le valvole di flusso vengono assemblate di seguito alle ventose. In caso di
separazione di una ventosa il flusso d‘aria chiude la valvola mantenendo
la pressione negativa all‘interno del sistema.
65
Minos
Tecnica pneumatica
La pressione negativa può essere generata per mezzo di una pompa a
vuoto oppure da un eiettore. La prima viene usata quando è necessaria
una grossa quantità di pressione negativa, la quale viene applicata alle
valvole per mezzo di valvole appropriate.
Gli eiettori vengono per generare pressione negativa „nel luogo“. Essi
vengono azionati con aria compressa e lavorano secondo il principio di
Venturi. Poichè gli eiettori non contengono nessuna parte mobile, essi
possono lavorare anche senza fili e non hanno bisogno di manutenzione.
L‘aria compressa all‘interno degli eiettori passa attraverso una bocchetta.
La pressione negativa si manifesta a causa dell‘alta velocità del flusso.
Essa viene applicata alle ventose per mezzo di una conduttura. Eiettori
semplici sono in grado di generare pressione negativa soltanto quando
l‘aria compressa passa attraverso di essi.
Una valvola di controllo di direzione può essere integrata all‘interno di un
eiettore in modo da azionare l‘aria compressa. Mentre un‘altra valvola di
controllo di direzione può essere utilizzata per condurre l‘aria compressa
all‘interno del sistema di conduttura delle ventose. Questa valvola genera
un impulso che in grado di provocare un rapido allentamento del pezzo
di lavoro. In altri modelli di eiettori l‘impulso può essere prodotto utilizzando un piccolo contenitore, il quale in grado, in maniera automatica,
di introdurre l‘aria compressa nel sistema di conduttura delle ventose
dopo il loro spegnimento.
Eiettori forniti di sistemi automatici di salvataggio d‘aria possiedono anche
un interruttore. Esso controlla lo stato attuale della pressione negativa
e quindi in grado di spegnere il supporto d‘aria compressa. Attraverso
l‘abbassamento di pressione negativa, l‘interrutore aziona nuovamente il
supporto d‘aria compressa al fine di rifornire l‘eiettore di nuova pressione.
66
Tecnica del £uido
2
Idraulica
2.1
Introduzione
Minos
Nell‘idraulica i £uidi vengono usati come mezzo di trasmissione. Il termine
idraulica deriva dal greco hydor, che signica acqua. L‘olio è il principale
medio di trasmissione, anche se tuttavia è possibile utilizzare l‘acqua.
Nell‘idraulica è possibile distinguere due settori: l‘idrodinamica e
l‘idrostatica. Nell‘idrodinamica viene sfruttato soprattutto il £usso d‘energia
del £uido di trasmissione. Attraverso di esso vengono a manifestarsi
pressioni relativamente basse. Essendo il £usso di energia un‘energia
cinetica, è possibile introdurre il termine Idrocinetica. Un esempio pratico
è la conversione delle frequenze dei momenti torcenti e rotazionali „in
£ow drives“.
Nell‘idrostatica, invece, la pressione dei £uidi viene sfruttata in un „ambiente chiuso“, dove essi rimangono senza movimento oppure in grado di
scorrere lentamente. Un esempio tipico è la generazione della pressione
attraverso una pompa e la sua conversione in una forza in grado di agire
su di un cilindro.
Le valvole vengono usate per il controllo della pressione; esse possono
operare manualmente o elettricamente. L‘utilizzo dell‘idraulica negli
aereoplani deve attenersi a speciali requisiti di sicurezza.
2.1.1
Vantaggi e svantaggi dell idraulica
L idraulica è una delle numerose forme d‘energia usate nell‘industria.
Essa può essere comparata con la pneumatica, l‘elettronica e con i
dispositivi meccanici.
– Grandi forze e momenti torcenti possono essere generati per mezzo dell‘idraulica, anche se i suoi componenti di costruzione sono di
misura molto piccola.
– Movimenti lineari possono essere ottenuti molto facilmente.
– „Starting from standstill is possible even with loads“
– È possibile modicare ampliamente la velocità di moto e le frequenze di rotazione.
– La direzione di moto può essere invertita molto semplicemente.
– Con l‘ausilio di appositi dispositivi è possibile misurare il valore delle
forze.
– Sovraccarichi si possono prevenire per mezzo di valvole di limite di
pressione.
– Singoli componenti possono essere ordinati in stanze diverse e
connessi per mezzo di condutture £essibili.
– I sistemi idraulici possono essere facilmente integrati con sistemi
elettrici e di regolazione.
67
Minos
Tecnica del £uido
Gli svantaggi dell‘idraulica sono:
– i componenti idrazlici richiedono un‘estrema accuratezza e precisione per il loro utilizzo, questo ne aumenta automaticamente anche il
costo.
– I dispositivi necessitano di un ltro per prevenire la formazione di
sporcizia nei £uidi idraulici.
– I liquidi idraulici devono essere ricondotti sempre all‘interno del serbatoio.
– A seconda della temperatura varia la viscosità dei £uidi, perciò occorre molto spesso raffreddare i £uidi.
– La lunghezza delle condutture è limitata.
– È possibile la formazione di bolle d‘aria all‘interno dei £uidi che potrebbero comportare una scorretta circolazione dei £uidi.
– Alcuni oli idraulici sono inammabili.
– La perdita dell‘olio è molto pericolosa.
– È difcile depositare l‘energia della pressione.
2.1.2
I settori d’utilizzo dell’idraulica
L‘idraulica viene utilizzata in diversi settori. Nell‘industria si impiega al
tornio „with feeders and spindle drives“.The moulds in the injection moulding machines for plastic processing are opened and closed hydraulically,
and the plastic is also pressed hydraulically. The hydraulic presses can
generate very large forces.
Al contrario, „idraulici mobili“ vengono utilizzati per macchine a movimento. Numerose macchine sono fornite di supporto idraulico. Questo non
solo per ciò che riguarda il processo di funzionamento, ma anche per la
„trasmissione a trazione“ (action drives).
Molte macchine agricole dispongono di motori idraulici.
I meccanismi idraulici vengono utilizzati principalmente per le navi e
aeroplani.
68
Tecnica del £uido
2.1.3
Minos
La costruzione di un dispositivo idraulico
I meccanismi idraulici possono essere costruiti in maniera diversa. Tuttavia gli elementi base sono molto simili tra di loro.
„L‘aggregato idraulico“ è composto da una pompa, quale genera la
pressione e produce il £usso di volume. Con l‘eccedere della pressione
le valvole di controllo di pressione si aprono e reintroducono il £uido nel
serbatoio. L‘energia meccanica viene trasformata in pressione.
Le valvole di controllo di direzione controllano la quantità del £usso generato, la direzione del moto dei cilindri e la direzione di rotazione dei
motori idraulici.
Le valvole a pressione in£uenzano la forza dei cilindri. Più alta è la pressione, maggiore sarà la forza dei cilindri. Attraverso le valvole a £usso
è possibile modicare la portata. Nelle costruzioni più semplici vengono
utilizzati le farfalle „chokes“. La quantità del £usso in£uenza la velocità di
trasmissione „Drives“. Le valvole di blocco dirigono il £usso in un‘unica
direzione. Esse possono essere usate per guidare i „chokes throttle“ in
una sola direzione (la direzione di blocco delle valvole di blocco).
Inne i cilindri trasformano nuovamente la pressione energetica in energia meccanica.
Figura 40:
meccanismo idraulico (immagine di: BoschRexroth)
69
Minos
2.2
Tecnica del £uido
Aggregato idraulico
I meccanismi idraulici producono pressione energetica. Essi sono caratterizzati da molteplici componenti di costruzione che è possibile ritrovare
in quasi tutti meccanismi idraulici.
Le pompe immettono ed alimentano il £uido idraulico. I tubi d‘aspirazione
non devono essere esposti ad energia negativa molto elevata, perchè
potrebbero formarsi nel £uido bolle di gas che attraverso l‘alta pressione
protebbero implodere bruscamente. Questo processo è chiamato cavitazione. L‘impatto può causare corrusioni e distruggere la pompa.
I motori elettrici vengono usati per guidare le pompe nelle macchine
stazionarie. Mentre i motori a combustione vengono usati molto spesso
con le macchine mobili.
Le pompe vengono costruite in modi molto differenti. Le pompe ad ingranaggi sono molto utilizzate. Queste generano una quantità costante di
£usso in una determinata velocità rotazionale. Altri tipi di pompe forniscono
una portata che può essere modicata. Altre invece non sono in grado
d‘aspirare il £usso. Esse devono essere posizionate accanto il livello del
£uido oppure devono essere equipaggiate di una pompa ad ingranaggi.
Pompa
Pumpe
Figura 41:
70
aggregato idraulico
Tecnica del £uido
2.2.1
Minos
Serbatoio idraulico
I £uidi idraulici vengono immagazzinati nel serbatoio, che deve essere
abbastanza grande da contenere l‘intero £uido usato dal meccanismo.
Il £uido deve essere abbastanza anche per rifornire tutti i cilindri; specialmente i cilindri ad azione singola necessitano di una grande quantità
d‘olio idraulico. Tuttavia, nei cilindri ad azione doppia, la camera del
pistone è più grande di quella dei pistoni a stelo. Quindi essi richiedono
una determinata quantità d‘olio idraulico.
Il sebatoio deve possedere un‘apertura di ventilazione necessaria per
l‘equalizzazione della pressione. Quest‘apertura lascia passare l‘aria
all‘interno del serbatoio in modo da prevenire la formazione di pressione
negativa nei £uidi idraulici. L‘apertura è fornita di un ltro per la prevenzione d‘impurità all‘entrata del serbatoio.
Un secondo ingresso viene utilizzato per il riempimento del serbatoio.
Anche questo è provvisto di un ltro, necessario per ltrare l‘olio idraulico
prima di riempire il serbatoio.
Il serbatoio è diviso in sezioni da una piastrella. La prima sezione serve
a calmare i liquidi che ri£uiscono all‘interno del serbatoio e a separare
le bolle d‘aria formatesi all‘interno del £uido. Anche le impurità vengono
immagazzinate qui. L‘olio idraulico passa alla seconda sezione attraverso
dei fori sulla piastrella dove verrà pompato di nuovo.
La prima sezione è situata al punto più basso del serbatoio. Essa possiede anche un tubo di scarico. Le impurità e la condesazione dell‘acqua
depositatesi in questa sezione, possono essere rimosse quando si cambia
l‘olio idraulico.
Le perdite all‘interno di un meccanismo idraulico causano il riscaldamento
dell‘olio. Un‘altra funzione del serbatoio è quella di raffreddare il £uido
idraulico. Perciò le pareti esterne di solito sono provviste di alette di
raffredamento. Se il meccanismo viene utilizzato a bassa temperatura,
possono essere utilizzati anche elementi „riscaldati“. Prima di azionare
il meccanismo l‘olio idraulico deve essere riscaldato e portato a temperatura di operazione.
Sul serbatoio vengono installati dei termometri per controllare la temperatura. Inoltre vi troviamo anche un‘indicatore di livello dell‘olio. La
marcatura mostra la capacità minima e massima di riempimento d‘olio.
Un apposito manometro mostra invece la pressione generata dalla pompa. Il livello di pressione, di temperatura e del £uido sono fattori importanti
e devono essere controllati regolarmente.
71
Minos
2.2.2
Tecnica del £uido
Valvole di controllo di pressione
Un‘altro componente fondamentale, utilizzato da tutti meccanismi idraulici,
è la valvola di controllo della pressione.
Questa valvola si apre e si chiude soltanto quando viene raggiunta una
determinata pressione (pre-modicata), permettendo all‘olio idraulico
di ri£uire nel serbatoio. La pressione nel meccanismo rimane costante.
Queste valvole inoltre proteggono il meccanismo da pressioni troppo
elevate, che sono in grado di danneggiare e distruggere il meccanismo
stesso. L‘intera quantità del £usso, rilasciata dalla pompa, deve essere in grado di ritornare al serbatoio attraverso le valvole di controllo di
pressione.
Le valvole di controllo diretto della pressione vengono adoperate per
quantità di £usso relativamente piccole. Mentre le valvole con pilota di
controllo sono usate per maggiori quantità di £usso. Tali operazioni vengono controllate da valvole più piccole.
2.2.3
Il filtro
Le componenti di costruzione dei meccanismi idraulici possono essere
facilmente danneggiati dalle impurità all‘interno dei liquidi; per cui è opportuno l‘utilizzo del ltro.
I ltri vengono posizionati, solitamente, in tre posizioni pricipali. Ognuna
di queste ha i propri vantaggi e svantaggi.
Il ltro d‘aspirazione viene usato per proteggere la pompa da ogni tipo di
impurità quando i liquidi vengono immagazzinati nel serbatoio. Questo
ltro però rappresenta anche una resistenza al £usso. Un olio idraulico
troppo freddo oppure un‘eccessiva viscosità del ltro, potrebbero diminuire considerabilmente la pressione provocando la cavitazione del £uido,
quale in grado di distruggere la pompa. Per questo che vengono usati i
„wire screen lters“.
Filtri di pressione vengono posizionati dopo la pompa. Poichè viene applicata la pressione completa su questi ltri, essi devono avere una costruzione robusta. Questi ltri sono molto costosi e vanno adoperati insieme
a componenti di costruzione molto sensibili, ad esempio le servovalvole.
Il terzo tipo è il ltro di ritorno. È situato nella linea di ritorno del serbatoio
e ltra il £usso dopo che esso sia passato attraverso tutto il meccanismo.
Si suppone che un singolo ciclo del £uido non provochi nessun danno
alle parti di costruzione.
72
Tecnica del £uido
Minos
I ltri di ritorno sono costruiti in modo semplice e quindi non molto costosi.
Le valvole di blocco con Bypass sono connesse parallelamente a questi
ltri. Se i ltri sono molto sporchi e costituiscono una considerevole resistenza al £usso, i „bypass“ si aprono e lasciano passare l‘olio idraulico
dal ltro.
È possibile anche l‘utilizzo di ltri più piccoli, dove può passare una sola
parte del £uido. L‘intera quantità d‘olio viene ltrata soltanto dopo diversi
cicli.
Indicatori di pressione differenziali mostrano la perdita di pressione causata dai ltri. Un aumento di pressione indicata da questi indicatori sta a
signicare che il ltro è otturato. Gli indicatori devono essere controllati
regolarmente e così i rispettivi ltri. I ltri senza indicatori devono essere
cambiati regolarmente.
2.3
Fluidi idraulici
Il £uido idraulico trasforma l‘energia dalla pompa al cilindro. Principalmente quasi ogni tipo di £uido può essere usato per questa funzione; a
volte viene utilizzata l‘acqua. L‘acqua è quasi sempre a disposizione e
costa poco. D‘altra parte però essa non è in grado di lubricare le parti
meccaniche e quindi causa di corrusioni.
Nell‘idraulica vengono utilizzati di solito oli minerali per via delle loro
caratteristiche di lubricazione, essenziale per i componenti movibili del
meccanismo e per la locro capacità di prevenzione dalla corrusione e
dalla dispersione di calore.
Esistono numerosi tipi di oli idraulici con caratteristiche differenti.Quando si seleziona un olio, bisogna essere sicuri che le sue caratteristiche
corrispondano al campo in cui verrà utilizzato.
2.3.1
Viscosità
La viscosità è una delle caretteristiche più importanti degli oli idraulici. La
viscosità deriva dal fatto che singole molecole di un £uido si muovono
a velocità differenti. Maggiore è la resistenza delle velocità, più elevato
sarà il grado di viscosità del £uido.
L‘acqua è meno viscosa dell‘olio. Questo può essere osservato facilmente. Basti agitare una tanica con dentro acqua ed una con dentro
olio. Occorrerà senza dubbio minor forza per scuotere la tanica d‘acqua.
Le componenti idrauliche sono caratterizzate sempre dal loro grado di
viscosità. I £uidi idraulici utilizzati devono corrispondere a questi valori.
73
Minos
Tecnica del £uido
I misuratori del grado viscosità sono chiamati viscosimetri. Ne esistono
diversi tipi. Nel viscosimetro capillare il £uido scorre in un tubo sottile,
in£uenzato dalla forza di gravità, misurandone il tempo impiegato dal
£uido per raggiungere un certo valore.
La viscosità è divisa in cinematica e dinamica. La cinematica è il risultato
della divisione della viscosità dinamica alla densità del £uido. La viscosità
dinamica è generalmente utilizzata nella tecnica. La sua misura di unità
è mm²/s. Unità di misura più vecchie, come centistokes e stokes, non
vengono più utilizzate.
La viscosità è altamente dipendente dalla temperatura. A temperatura
elevata i valori della viscosità sono sempre bassi. Questa relazione viene
denita nel diagramma viscosità-temperatura.
Come già menzionato, le parti idrauliche sono adatte soltanto per determinati valori di viscosità. Perciò i „parametri di operazione“ devono
essere presi in considerazione durante la selezione di un £uido idraulico.
Con un valore di viscosità molto basso possono presentarsi problemi di
lubricazione o „sealing“. Mentre, al contrario, un valore elevato di viscosità, potrebbe appensantire molto il lavoro della pompa e dei motori.
I valori di viscosità degli oli idraulici sono stabiliti a 40 °C e classicati
nella classe ISO-viscosità. I valori numerici indicano la viscosità. Ad
esempio, l‘olio idraulico con ISO-VG 46 possiede un valore viscoso pari
a 46 mm²/s alla temperatura di 40 °C.
La DIN 2209 stabilisce l‘indice di viscosità. Questo valore denisce la
relazione tra la proprietà dei £uidi idraulici e la temperatura. Quando i
valori sono alti signica che sono meno dipendenti dalla temperatura.
Questi valori coprono un raggio che sta tra 100, per i normali oli idraulici,
e 150 per £uidi speciali.
Inne il grado di viscosità non dipende soltanto dalla temperatura ma
anche dalla pressione. Questo fattore può essere osservato semplicemente con valori di pressione che superano i 200 bar. Il valore di viscosità
raddoppia a 400 bar.
74
Tecnica del £uido
2.3.2
Minos
Altre caratteristiche dei fluidi idraulici
La densità dell‘olio idraulico normalmente è di 0,9 kg/dm³. Esso è più
leggero dell‘acqua. Perciò l‘acqua si deposita nel fondo del serbatoio
idraulico, ed è possibile rimuoverla attraverso aperture apposite. Tuttavia
le impurità possono aumentare la densità dell‘olio no a portarla ad un
valori di 1,4 kg/dm³.
Con l‘aumento della temperatura aumenta anche il volume dei £uidi idraulici. Un aumento di dieci gradi accresce il volume di circa 0,7%. Perciò il
serbatoio dovrà essere abbastanza grande da contenere questi valori.
Un‘altra caratteristica dei £uidi è la loro capacità di compressione. Al
contrario dei gas questi valori sono di gran lunga più piccoli. Essi raggiungono un valore di 0,7 % per un aumento di pressione pari a 100 bar. Col
diminuire della pressione il volume del £uido torna al suo valore originale.
Malgrado la bassa capacità di compressione dei £uidi, essi in£uiscono
sulla precisione delle macchine idrauliche. Attraverso una giusta regolazione è possibile raggiungere un‘elevata precisione. Bisogna prendere in
considerazione anche un altro fattore, ovvero che i tubi e le connessioni
sottopressione tendono ad ingrandirsi, e questo aumenta in maniera
considerevole l‘effetto di compressione.
Il „pour point“ di un £uido idraulico è la temperatura, sotto la quale l‘olio
per via della forza di gravità, non riesce più a £uire. A volte gli aggregati
idraulici devono essere in grado di lavorare a basse temperature, in
questo caso è corretto l‘utilizzo di oli a bassa percentuale di viscosità.
Per molti tipi d‘oli idraulici l‘elevata temperatura è la causa della loro
inammabilità. La temperatura, sotto la quale i vapori dell‘olio potrebbero inammarsi, è chiamata £ash point. Il £ash point per oli idraulici più
comuni, normalmente si aggira intorno ai 180 e i 200 °C. Al di sopra di
questi valori l‘olio potrebbe inammarsi.
In posti dove la temperatura è molto alta, dovranno essere utilizzati £uidi
a bassa percentuale d‘inammabilità oppure non inammabili.
75
Minos
Tecnica del £uido
La lubricazione delle parti mobili dei meccanismi idraulici è una funzione
molto importante dei £uidi. Un sottile rivestimento protegge le parti metalliche dal loro contatto. Allo stesso tempo diminuisce l‘attrito tra le parti.
La bassa capacità di lubricazione di un olio, conseguente, ad esempio,
al loro basso grado di viscosità, comporta problemi ai rivestimenti metallici. Questo fattore è in grado di logorare e persino distruggere le parti
meccaniche di un meccanismo idraulico.
Attraverso il confronto di diversi tipi d‘olio è possibile osservarne il loro
grado di capacità di lubricazione.
La durata nel tempo di un olio idraulico si distingue dalla loro capacità di
resistenza. L‘olio idraulico invecchia attraverso il contatto dell‘ossido con
l‘ossigeno. Il processo d‘invecchiamento prende soprattutto a temperature superiori ai 70 °C. Gli additivi di lubricazione aumentano la durata
dell‘olio. Un‘olio invecchiato assume un colore scuro. Poichè è difcile
stabilire il tempo esatto di durata di un‘olio, esso deve essere cambiato
regolarmente.
Oltre alla lubricazione i £uidi idraulici prevengono le parti meccaniche
dalla formazione di ruggine. L‘olio idraulico non deve venire a contatto
con „sealings“ e i tubi. Nel cambiare i £uidi idraulici è oppurtuno prestare
attenzione alla loro compatibilità. Potrebbe essere necessaria la pulizia
del meccanismo dopo la rimozione di £uidi invecchiati.
In molte valvole il £uido idraulico passa attraverso una bobbina magnetica al ne di dissiparne il calore. In caso di corto circuito o rottura di cavi
elettrici il £uido deve lavorare come mezzo di isolamento, questo signica
che il £uido idraulico non deve passare sulla corrente elettrica.
76
Tecnica del £uido
2.3.3
Minos
Materie estranee, aria e acqua nei fluidi idraulici
I £uidi idraulici devono contenere il minor numero possibile di impurità.
Più alta è la pressione operativa all‘interno di un meccanismo, più rigido
sarà il lavoro necessario di „sealings“ , come ad esempio nelle valvole
di controllo di direzione. Le impurità possono danneggiare „sealings“ e
portare alla rottura dell‘impianto idraulico.
Le impurità che vengono a presentarsi durante il lavoro del meccanismo,
dovranno essere rimosse. I £uidi idraulici devono prendere queste particelle per ricondurle poi all‘interno del serbatoio, dove potranno essere
ltrate.
Il livello di pulizia per i £uidi idraulici è stabilito nella ISO 4406, quale determina il massimo della quantità di particelle in un volume di 100 ml. Tre
valori deniscono il numero massimo permesso di particelle più larghe di
4 ºm, 6 ºm e 14 ºm.Un valore tipico di pulizia riguardante i meccanismi
idraulici, ad una pressione di 160 bar, è di 21/18/13.
Otre ai corpi solidi è possibile la presenza d‘aria all‘interno dei £uidi. L‘aria
disciolta non in£uisce sui meccanismi operativi.
All‘interno del £uido possono formarsi piccole bolle d‘aria. Si deve evitare
la loro formazione. Essa provaca l‘aumento della compressibilità del £uido, perchè le bolle d‘aria sono compressibili come i gas. Questa causa
il movimento irregolare (a scatti) ed un forte rumore del meccanismo.
La temperatura all‘interno delle bolle d‘aria compresse aumenta. Questo
comporta ad un veloce deterioramento dell‘olio ed alla formazione del
vapore, derivante dall‘olio, nel loro interno.
Attraverso le bolle d‘aria viene a formarsi una schiuma, che viene separata
da una lastra all‘interno del serbatoio, così da permettere il pompaggio
dell‘olio pulito. Pompare l‘olio contenente bolle d‘aria può portare alla
cavitazione, quale in grado di distruggere il meccanismo idraulico.
Il riempimento del dispositivo idraulico può portare alla formazione del
cuscino pneumatico. Per questo gli ingressi di ventilazione vengono posizionati alla stessa altezza del dispositivo, quale permette la rimozione
d‘aria dai tubi del sistema.
77
Minos
Tecnica del £uido
Un altro ingrediente indesiderato dell‘olio idraulico è l‘acqua, perchè provoca corrosione e impedisce la formazione di rivistimento di lubricazione.
L‘acqua può inltrarsi nei liquidi idraulici in diversi modi. A volte può essere contenuta già all‘interno dell‘olio fresco oppure formarsi nel serbatoio
come acqua condensata. Inoltre essa può penetrare nei liquidi anche
attraverso la sua perdita dalla ventola di raffredamento.
L‘acqua intorbidisce l‘olio idraulico. Essa è più pesante dell‘olio. e per
questo si deposita nel fondo del serbatoio, ove può essere rimossa attraverso l‘apertura della vite di scarico.
Tuttavia è possibile utilizzare olio sintetico, il quale possiede un valore
di densità più vicino a quello dell‘acqua. In questo caso l‘acqua non è in
grado di depositarsi sul fondo del serbatoio. Questo effetto è desiderato
dai £uidi a bassa inammabilità. Per questo viene usata l‘emulsione
d‘acqua ed olio.
2.3.4
Tutela ambientale
Una piccola quantità d‘olio idraulico è abbastanza da inquinare una
grande quantità d‘acqua, ed è per questo che l‘utilizzo dei £uidi idraulici
deve essere il più ecologico possibile.
I £uidi idraulici vengono classicati in tre classi, riguardanti i rischi per
l‘acqua:
WGK1 pericolo d‘inquinamento d‘acqua: basso
WGK2 pericolo d‘inquinamento d‘acqua: medio
WGK3 pericolo d‘inquinamento d‘acqua: alto
Oli vegetali inquinano meno. I cosi chiamati bio-oil sono facilmente biodegradabile e possono essere usati ad esempio in zone di protezione
d‘acqua. Oltretutto ci sono alcuni £uidi idraulici, quali non rappresentano
alcun pericolo per l‘acqua.
È ovvio che i £uidi idraulici devono essere possibilmente non tossici e
non debbano provocare irritazioni della pelle ed essere inodore.
D‘altra parte i costi dei £uidi idraulici devono essere abbastanza bassi. Il
costo complessivo include il prezzo diretto e la sua durata. Inne bisogna
prendere in considerazione anche le spese di spedizione.
78
Tecnica del £uido
Minos
Esistono numerosi tipi di £uido idraulico. La differenza del tipo viene
denita da una lettera.
Alcuni tipi importanti di oli minerali sono:
H
olio minerale senza additivi, essi vengono utilizzati appena
nell‘idraulica
HL
olio minerale con additivi, che aumentano la prevenzione di
corrusione ed hanno lunga durata
HLP sono come quelli HL, ma possiedono ulteriori additivi per la
prevenzione di deterioramento
HVLP sono come quelli HLP, con un grado di viscosità più elevato
Alcuni £uidi importanti a bassa inammabilità sono:
HSA
HSB
HSC
HSD
olio in emulsione d‘acqua, max. 20 Vol.% di parte inammabile
acqua in emulsione d‘olio, max. 60 Vol.% di parte inammabile
soluzione-acqua-glicol
£uido sintetico senz‘acqua
Alcuni £uidi importanti per il rispetto dell‘ambiente:
HETG olio vegetale
HEPG Poliglicol
HEES estere sintetico
79
Minos
2.4
Tecnica del £uido
Pompe idrauliche
Le pompe trasformano l‘energia meccanica dei motori in energia idraulica. Viene generata una quantità di £usso ed allo stesso tempo i £ussi
idraulici vengono sottoposti a pressione.
Le pompe lavorano conformemente a due principi base di funzione. Nei
compressori di tipo meccanico l‘aumento di pressione si genera attraverso
l‘incremento della velocità del £usso, che verrà convertita poi in pressione.
Questo processo è in grado di produrre qualche bar di pressione.
Poichè nell‘idraulica vengono usati anche valori d‘energia molto elevati,
saranno necessarie le pompe volumetriche „positive-displacement“. Il
£uido di aspirazione scorre in uno spazio molto ampio, quale riduce le
sue dimensioni dopo il passaggio del £uido. Poichè i £uidi sono quasi
incompressibili, „it will be steadily put back under pressur“. Attraverso
questo principio la pompa idraulica è in grado di produrre una quantità
di pressione superiore ai cento bar.
Esistone numerose forme di costruzione delle pompe volumetriche. A
seconda delle necessità operative di un meccanismo vengono prodotte
pompe sotto diversi principi di costruzione.
Le pompe si sottodividono generalmente in pompe a pistoni rotanti e
pompe a pistoni reciproci. Alcuni modelli più rappresentativi di pompe a
pistoni rotanti sono quelle ad ingranaggi, a vite ed a palette scorrevoli.
Riguardo alle pompe a pistoni reciproci troviamo invece la pompa a pistoni reciproci seriali, a pistone radiale e quella a pistone assiale. Tuttavia
esistono ulteriori tipi di costruzione.
Nei diagrammi le pompe vengono indicate con un cerchio. La direzione
del £usso mentre da un triangolo. La direzione del £usso nel diagramma
generalmente va dal basso verso l‘alto. Se la direzione è possibile da
entrambe i lati, allora la direzione viene simbolizzata da due triangoli
collocati in direzione opposta.
Il motore della pompa è rappresentato da una doppia linea. Una freccia
curva può essere utilizzata per mostrare la direzione del £usso. Una
freccia che attraversa il simbolo della pompa signica che la quantità di
£usso è modicabile; ad essa viene mostrato anche quale tipo di modica.
Many pumps have an over£ow oil line connection, wich is indicated with
a small reservoir symbol.
Al contrario delle pompe nei motori il simbolo del triangolo è rivolto verso
l‘interno.
80
Tecnica del £uido
2.4.1
Minos
Pompe ad ingranaggi
Di pompe ad ingranaggi vi troviamo quelle di tipo interno e di tipo esterno.
Quelle di tipo esterno sono tra le più comuni.
La costruzione di una pompa di tipio esterno è molto semplice. La pompa
è robusta e relativamente invulnerabile allo sporco. Essa è adatta a lavorare ad alte frequenze di rotazioni e con valori di viscosità molto elevati.
Oltretutto queste pompe sono relativamente economiche.
Le pompe ad ingranaggi mantengono costante la quantità del £usso. Questa può essere cambiata soltanto attraverso la modica della frequenza
di rotazione. A causa delle fuoriuscite provocate dall‘alta pressione tende
a diminuire il volume del £usso, anche se in maniera irrilevante.
Le pompe ad ingranaggi sono composte da due ruote dentate che ruotano in direzione opposta all’interno del loro involucro. Il £uido idraulico
passa tra le ruote e le pareti del loro involucro, raggiungendo il portello
di pressione. Nella parte centrale i denti delle ruote si ingranano tra di
loro e prevenendo il ri£usso del £uido.
Figura 42:
pompa ad ingranaggi (immagine di: BoschRexroth)
81
Minos
Tecnica del £uido
Una piccola quantità del £uido idraulico rimane tra i denti, riducendone
lo spazio che intercorre tra loro. Questo comporta all’incremento della
pressione. Per impedire che questo avvenga è opportuno utilizzare
„squeezed oil“ alimentato da piccoli canali disposti sul lato della pressione. Questo permette alla pompa di lavorare in maniera più silenziosa
e sofce.
Le guarnizioni premeno le ruote dentate da un lato. La forza della pressione è generata dalla pressione che agisce sulle guarnizioni allo sbocco
della pompa. Attraverso l’incremento della pressione, al momento della
sua emissione, aumenta anche la forza esercitata dalle guarnizioni.
Questo tipo di costruzione specica qual’è l’entrata delle due connessioni
e il lato della pressione. Quindi la direzione del £usso dipende dal tipo
di costruzione e non può essere cambiata.
Le perdite di pressione in una pompa determinano il fattore volumetrico
di efcienza. Questo fattore descrive il rapporto tra la quantità attuale
del £usso con la quantità possibile teorica. La frizione all’interno della
pompa viene descritta con il fattore di efcienza meccanico.
Alcuni svantaggi delle pompe ad ingranaggi di tipo esterno riguardano le
pulsazioni del £uido e il loro rumore. La causa delle pulsazioni è dovuta
dall’ingranamento e il rilascio dei singoli denti della ruota. Le pulsazioni
si possono ridurre attraverso l’utilizzo di due pompe, „so that the teeth
of the gearwheel of one pump are shifted by a half tooth relative to the
other pump.“ Possono essere usate anche ruote dentate „with sloped
teeth“. Esse però producono una forza assiale che deve essere assorbita
attraverso l’ausilio di cuscinetti.
Le pompe ad ingranaggi di tipo interno sono costituite da due ruote
dentate di grandezza differente. I denti della ruota più grande sono diretti
verso l’interno. La ruota più piccola è costruita in maniera tale da poter
da un lato di essa ingranare con quella più grande. Dall’altra parte lo
spazio a forma di falce è riempito parzialmente da un corpo solido sso.
Questo corpo a forma di falce ricopre lo spazio tra i denti delle due ruote.
Attraverso la rotazione degli ingranaggi viene a formarsi in modo crescente uno spazio tra di loro, che viene riempito dal £uido idraulico. Gli spazi
intermedi tra i denti della ruota passano vicino al corpo separato a forma
di falce. Il volume dello spazio non cambia. Soltanto dopo il corpo separato ingranano di nuovo i denti ed il volume decresce nuovamente. In
questa sezione il £uido viene espulso di nuovo dalla pompa.
82
Tecnica del £uido
Minos
Poichè la sezione tra il punto di immissione ed espulsione è molto lunga,
„l’alimentazione“ è libera dalle pulsazioni e dal rumore. Tuttavia i costi
sono relativamente alti se comparati alle pompe di tipo esterno.
La pompa ad ingranaggi ad anello ha una costruzione molto simile a quelle
qui nora descritte. L’ingranaggio al suo interno possiede esattamente
un dente in meno di quello esterno. Le ruote sono sempre in contatto tra
di loro, senza dover ricorrere all’ausilio del compenente a forma di falce.
Poichè l’ingranaggio interno si trova in posizione eccentrica rispetto a
quello esterno, i denti ingranano su un punto laterale di essa. Mentre
dall’altra parte le ruote sono popsizionate in direzione opposta tra di loro.
Durante la rotazione aumenta inizialmente il volume, per poi diminuire
nuovamente.
Ci sono tipi di costruzione caratterizzate da ruote esterne che sono entrambe sse e ruotanti. Nelle costruzioni con ruota esterna ssa, la ruota
interna ulteriormente alla sua normale rotazione muove su di una guida
di forma circolare. Questo principio di funzione viene chiamato Gerotor.
Il vantaggio consiste che nella sua piccola frequenza rotazionale è in
grado di generare un elevato volume del £usso.
Figura 43:
pompa ad ingranaggi di tipo interno (figura di: BoschRexroth)
83
Minos
2.4.2
Tecnica del £uido
Le pompe a vite
Una pompa a vite è composta da due o tre mandrini a forma di vite con
la rispettiva lettatura inversa.
Quando il mandrino gira „a closed volume moves to the pressure side
per thread pitch.“Con il suo moto rotazionale uniforme la pompa a vite è
in grado di produrre costantemente un determinato £usso di volume ed
è molto silenziosa.
Il numero dei letti varia a seconda della quantità di pressione desiderata.
Più è alta la pressione desiderata maggiore saranno i numeri dei letti.
Con questo le perdite tra i singoli letti vengono diminuite. La forza assiale che agisce sui mandrini viene intercettata dai cuscinetti esterni. La
forza radiale invece è insignicante, in quanto i mandrini sono esposti a
pressione da tutte le direzioni.
Le pompe a vite, come quelle ad ingranaggi, alimentano una quantità
costante di £uido per giro. La quantità può essere cambiata soltanto modicando la sua frequenza di rotazione. Tuttavia le pompe a vite possono
lavorare a frequenze rotazionali molto elevate.
Figura 44:
84
pompa a vite (figura di: BoschRexroth)
Tecnica del £uido
2.4.3
Minos
Pompe a palette
Le pompe a palette hanno un rotore che gira all‘interno di un involucro. Al
rotore sono predisposte molte palette che attraverso la forza centrifuga si
dirigono verso l’esterno. Le palette possono essere spinte anche contro
le pareti dell’involucro, per mezzo di molle oppure utilizzando l’espulsione
della pressione di una pompa.
La posizione eccentrica del rotore permette l’aumento dello spazio tra
l’involucro e risucchia i £uidi al suo interno. Dopodichè diminuisce di
nuovo la misura dello spazio e attraverso ciò il £uido viene alimentato
dalla parte della pressione.
In alcune costruzioni, che possiedono l’involucro a forma di ovale, il processo qui sopra descritto viene implementato due volte per giro. L’asse
viene allo stesso tempo appesantita perchè le forze radiali opposte si
compensano l’una con l’altra.
Le pompe a palette hanno un livello di rumore relativamente basso,
perchè la loro alimentazione è quasi libera dalle pulsazioni. Esse vengono
usate prima di tutto per ottenere un grande volume di £usso oppure per
una piccola quantità di pressione. Sono possibili anche le costruzioni a
due tempi. Poichè le palette slittano lungo le pareti dell’involucro queste
pompe sono più vulnerabili allo sporco.
Figura 45:
pompa a paletta (figura di: BoschRexroth)
85
Minos
Tecnica del £uido
Le pompe a paletta hanno costruzioni dove la quantità del £uido può
essere costante o variabile. Il volume viene cambiato attraverso lo spostamento del rotore, al contrario delle pompe a volume costante dove
esso è sso. Anche nelle pompe a doppia alimentazione lo spostamente
è impossibile.
A seconda del tipo di costruzione il rotore può essere cambiato manualmente oppure idraulicamente. Quando esso ruota al centro del suo
involucro lo spazio tra le palette rimane invariato e non ci sarà nessua
alimentazione. Più il rotore si sposterà dalla sua posizione centrale originaria, maggiore sarà la portata del £usso. In molti tipi di costruzione la
direzione del volume può essere invertita spostando il rotore alla parte
opposta della sua posizione eccentrica attuale.
Nelle pompe a paletta è possibile regolare anche la pressione. Una volta
raggiunta la pressione desiderata il rotore viene spostato inella posizione intermedia. In questa posizione non viene più alimentata la quantità
del volume, ma la pressione rimane costante. Non appena la pressione
diminuisce il rotore verrà spostato dall posizione intermedia e riinizierà
di nuovo il processo di alimentazione.
I controlli della pressione, sotto questo principio, devono reagire velocemente per prevenire o vaporizzare ogni tipo di „oscillazione“ o problema
nel sistema.
2.4.4
Pompe a pistoni seriali
Le pompe a pistoni seriali appartengono alle reciproche macchine a
pistoni. Esse sono caratterizzate da numerosi cilindri ordinati in serie.
I pistoni all’interno dei cilindri vengono mossi da una camma/albero.La
corsa di ritorno dei pistoni viene eseguita per mezzo di una camma o di
una molla.
L’aspirazione e l’alimentazione vengono controllate dalle valvole, cosicchè la la direzione dell’alimentazione sia independente dalla direzione
di rotazione.
La quantità del volume può passare attraverso il pistone. I pistoni hanno un „sloped boarder“ che a seconda della sua posizione, permette di
connettere un maggior o minor numero di sezioni dello „stroke“ attraverso
la loro apertura, attraverso la quale il £uido è in grado di tornare.
86
Tecnica del £uido
2.4.4
Minos
Pompe a pistoni radiali
Si distinguono due tipi fondamentali di costruzione di pompe a pistoni
radiali. Nelle pompe pressurizzate internamente i pistoni che vengono
costruiti a forma di stella, puntellano l’involucro dall’esterno. Esse ruotano
con i cilindri posizionati eccentricamente nell’involucro. Il pistone immette
il £uido idraulico dall’interno espellendolo nuovamente dopo una mezza
ruotazione dal centro.
Il numero dei pistoni è disparo, rendendo l’alimentazione più regolare.
Essi puntellano le pareti dell’involucro direttamente oppure „via rolls“ o
„seating shoe“. La frizione può essere ridotta usando il £uido idraulico
pressurizzato.
La corsa del pistone e consequentemente l’alimentazione del volume
possono essere cambiati spostando l’anello dell’involucro. Posizionando il pistone esatamente al centro non risulta nessuna alimentazione.
In alcune costruzioni la direzione d’alimentazione può essere invertita
spostandola nella direzione opposta. La posizione dell’anello può essere
modicata manualmente oppure idraulicamente.
Figura 46:
pompa a pistoni radiali (figura di: BoschRexroth)
87
Minos
Tecnica del £uido
Nelle pompe a pistoni radiali pressurizzate esternamente anche i pistoni
sono costruiti a forma di stella. Tuttavia essi sono ssi e vengono mossi da
un meccanismo eccentrico situato in una posizione intermedia. Per poter
mantenere i pistoni in contatto con „l‘elemento eccentrico“ essi vengono
pressati da una molla. La regolazione dell’aspirazione e dell’emissione
viene svolta svolta per mezzo di „slitte“/guide o valvole.
Le pompe a pistoni radiali sono applicabili a pressioni molto elevate di
diverse centinaia di bar. Esse possiedono connessioni di supporto per le
perdite d‘olio, attraverso le quali l‘olio ri£uisce nel serbatoio. Non deve
accumularsi pressione all‘interno delle condutture d’olio.
2.4.4
Pompe a pistoni assiali
Nelle pompe a pistoni assiali i pistoni sono paralleli o leggermente inclinati
gli uni con gli altri. Queste pompe hanno un numero disparo di pistoni
rendendo l‘alimentazione più stabile.
Le pompe a pistoni assiali si dividono in quelle: a pistone assiale inclinato
e a piatto inclinato. Nelle prime l’involucro e il pistone sono posizionati
angolarmente all’albero di uscita. D’altra parte, nelle pompe a piatto
inclinato, i pistoni sono mossi per mezzo di un piatto „sloped-arrenged“.
α
Figura 47:
88
Pompa a pistoni assiali, pistone assiale inclinato (immagine di: BoschRexroth)
Tecnica del £uido
Minos
I pistoni nelle pompe a pistoni assiali inclinati, vengono ordinati all’interno
di un tamburo rotante. Essi sono ssati su di un piatto rotante per mezzo
di giunte a forma sferica. La rotazione viene trasformata dal piatto al
tamburo attraverso i pistoni, oppure usando giunti cardanici.
A causa dell’angolo tra il piatto e il tamburo le giunte sferiche si muovono
su una via ellittica che facilita il movimento avanti e indietro dei pistoni
durante un giro. La loro forma conica permette l’esecuzione di questo
movimento. È possibile la presenza nel pistone di una ulteriore giuntura
a sfera.
Durante il compimento di un giro il tamburo i pistoni passano atrraverso
due aperture „drusy-shaped“. Attraverso di esse è possibile regolare
anche l‘alimentazione e l‘aspirazione.
Le pompe a pistoni assiali con angolo sso sono pompe costanti. Nelle
pompe modicabili può essere cambiata l’angolazione del tamburo e
consequentemente la quantità del £usso.Le possibilità di modica in tutte
e due i lati della posiztione intermedia permette anche l’inversione della
direzione del £usso.
α
Figura 48: pompa a pistoni assiali, piatto inclinato (immagine di:
BoschRexroth)
89
Minos
Tecnica del £uido
Nelle pompe a piatto inclinato anche i pistoni ruotano dentro al tamburo.
Essi vengono pressati in un piatto inclinato per mezzo di molle oppure
ssati sul piatto con giunte a sfera. Tuttavia sono i pistoni che attraverso
i loro cuscinetti ruotano sul piatto.
La regolazione dell’aspirazione e dell’alimentazione in queste costruzioni,
viene regolata anch’essa attraverso le due aperture „drusy-shaped“. Il
tamburo passa attraverso queste aperture durante la rotazione.
Modicando l’inclinazione del piatto è possibile cambiare la corsa del
pistone e di consegueza l’espulsione del £usso.
Nelle pompe a pistoni assiali con piatto oscillante il tamburo non ruota
insieme al pistoe. È il piatto a ruotare, invece di premere i pistoni uno
dopo l‘altro all‘interno del tamburo.La corsa di ritorno viene effettualta per
mezzo della forza elastica, la quale respinge i pistoni al piatto.
La posizione inclinata del piattello non può essere modicata. Di conseguenza queste pompe sono in grado di supportare soltanto una quantità
costante di £usso.
Figura 49:
90
pompa a pistoni assiali, a piatto oscillane (immagine di: BoschRexroth)
Tecnica del £uido
2.5
Minos
Cilindri e motori
Le pompe trasformano l’energia meccanica in pressione energetica. I
meccanismi idraulici trasformano quest’energia nuovamente in meccanica. I dispositivi che generano un moto lineare sono chiamati cilindri
o idro-cilindri. D’altra parte, i motori vengono usati per generare moti
rotazionali.
Le valvole vengono utilizzate per controllare i dispositivi. Essi sono
connessi alle pompe per mezzo di tubi.
I cilindri idraulici vengono utilizzati per muovere carichi pesanti, che necessitano di forze molto grandi. Usi tipici sono la fresatura e l’iniezione. In
questo caso le velocità richieste sono decisamente basse. I cilindri idraulici
possono lavorare anche con alte velocità, ad esempio per chiudere una
pressa attraverso macchine a stampaggio ad iniezione.
I dispositivi idraulici hanno una elevata potenza di densità. Essi sono
perciò denitivamente più piccoli di altri dispositivi che capaci di una simile
prestazione. I dispositivi elettrici ad esmpio richiedono troppo spazio. I
meccanismi pneumatici sono collocati in una posizione intermediaria tra
i meccanismi idraulici o elettrici.
Dispositivo
elettrici
(motore asincrono a tre fasi )
Elektromotor
(Drehstrom-Asynchronmotor)
Dispositivo
pneumatici
(motore a lamella)
Druckluftmotor
(Lamellenmotor)
Dispositivo
idraulico
(motore ad ingranaggi)
Hydraulikmotor
(Zahnradmotor)
Figura 50:
comparazione della misura dei dispositivi
91
Minos
2.5.1
Tecnica del £uido
Cilindro ad azione singola
I cilindri si dividono in due principali forme di costruzione: ad azione
singola e ad azione doppia. I cilindri ad azione singola trasporta le forze
in una sola direzione. La corsa di ritorno viene svolta una molla o una
forza esterna.
In generale i cilindri consistono in pistoni con pistoni a stelo, il tubo cilindrico con due „tappi“, i quali chiudono i tubi del cilindro da tutte e due i
lati. I cilindri ad azione singola possiedono soltanto ua connessione per
immettere e espellere il £uido idraulico.
Il £uido idraulico entra nella camera del pistone pressando quest’ultimo.
Questa forza viene trasformata verso l’esterno attraverso i pistoni a
stelo- La forza del cilindro dipende consequentemente dalla supercie del
pistone e la pressione del £uido idraulico. Mentre la velocità di fuoriuscita
del £uido dipende dalla quantità del £usso.
Il pistone può essere anche a forma di disco, come nei cilindri a doppia
azione. La posizione di partenza ritratta oppure estesa del cilindro è
possibile senza l‘ausilio della pressione. I cilindri con una molla reversa
hanno una corsa breve. La molla infatti necessita di un determinato spazio
e la forza elastica varia durante la sua corsa.
I cilindri plunger possiedono soltanto un pistone a stelo. Quando questi
cilindri sono operativi, non è permesso al pistone di uscire in maniera
completa, in£uenzato dal pesante impatto.
Per questa costruzione non ci sono accorgimenti speciali, riguardo l‘area
della supercie interna. Il pistone a stelo deve essere installato nella parte
superiore del cilindro, verso le pareti dell‘involucro.
I cilindri plunger vengono utilizzati su dispositivi di sollevamento o su
carrelli elevatori.Ma possono essere usati anche come ruote nei cilindri
d‘arresto. „Shear forces“ non deveno agire sui pistoni a stelo. Unità di
guida vengono utilizzate quando queste forse vengono a manifestarsi.
Un‘altro cilindro speciale, ad azione singola, è il cilindro a telescopio. Al
suo interno si trovano più pistoni situati uno dentro l‘altro, che scorrono
verso l‘esterno uno alla volta.La lunghezza di questi cilindri è molto lunga.
I cilindri a telescopio „have uo to 5 steps“. La loro corsa di ritorno è molto
lunga ed essi non generano „shear forces“
92
Tecnica del £uido
Minos
I cilindri a telescopio necessitano di molti „sealings“. Per questo richiedono
un‘accurata precisione nel trattamento, ed i loro costi sono molto elevati.
L‘estensione dei cilindri a telescopio inizia sempre dal pistone più grande.
Esse genera maggior forza rispetto agli altri. Gli altri pistoni escono in
maniera progressiva a seconda della loro grandezza. La forza esercitata
dai pistoni diminuisce relativamente alla loro grandezza.
D‘altra parte però, aumenta la velocità man mano che i pistoni di diametro inferiore compiono il loro movimento, se la portata rimane costante.
Durante la loro corsa di rientro, ovviamente la velocità tende a diminuire.
Durante quest‘ultimo movimento la portata deve essere ad effetto oscillante, in modo da prevenire il duro impatto tra un pistone e l‘altro.
I cilindri a telescopio vengono tilizzati ad esempio negli „skips“ e nei sollevatori idraulici. Il decrescere della forza durante la loro estensionenon
è di grande importanza per gli „skips“, perchè essi richiedono maggiore
forza dzurante la fase di sollevamento. È bene ricordare che quando
l‘ultimo pistone, il più piccolo, compie la sua estensione, il cilindro esercita
il massimo della sua forza.
Ci sono anche cildri a telescopie ad azione doppia. I pistoni di questi cilindri compiono il loro movimento di ritorno attraverso la pressione, che viene
applicata sulla parte dello stelo, quindi senza l‘ausilio di forze esterne.
I cilindri a telescopio, che possiedono tutti i pistoni di uguale grandezza,
vangono chiamati cilindri a telescopio di bilanciamento della corsa.Poichè
la grandezza della loro supercie è uguale, essi corrono verso l‘esterno
in modo similtaneo. Questo previene dagli impatti di transizione intermedi
tra un pistone e l‘altro.
93
Minos
2.5.2
Tecnica del £uido
2.5.2.Cilindri ad azione doppia
I cilindri ad azione doppia sono di uso molto frequente. Essi sono in grado di espellere la forza in tutte e due le direzioni di corsa. Entrambe le
connessioni del £uido idraulico possono essere pressurizzate o connesse
al serbatoio, a seconda del moto di direzione.
I cilindri idraulici possono espellere forze molto grandi grazie alla loro
elevata capacità di pressione. Per permettere questo il pistone a stelo del
cilindro possiede un diametro più largo di quello del cilindro pneumatico.
Molti cilindri idraulici hanno la supercie del pistone due volte più larga
di quella a forma di anello die pistoni a stelo. Perciò le forze generate da
un cilindro idraulico, durante la sua estensione, sono due volte più grandi
di quelle d‘espulsione, durante il rientro del pistone.
Le grandezze delle camere di un cilindro, in tutte e due i lati, variano a
seconda della grandezza della supercie del pistone. Quindi, a volume
costante, il cilindro si estende due volte più lentamente di quando si ritira.
Figura 51:
94
cilindro ad azione doppia (immagine di: BoschRexroth)
Tecnica del £uido
Minos
Un „coupling“ speciale permette il passaggio del £uido idraulico dallo
stelo al pistone. Questo avviene mentre il cilindro compie la sua corsa
verso l‘esterno, aumentandone la velocità di uscita, ma riducendone la
forza generata. Un‘alta velocità d‘uscita e necessaria per una rapida
„alimentazione“.
È possibile utilizzare le differenti aree di supercie per trasformare la
pressione. Nel caso il £uido idraulico non fosse in grado di fuoriuscire
dalla camera del pistone a stelo, a seconda del rapporto tra le aree della supercie del pistone una determinata quantità di pressione verrà a
crearsi all‘interno della camera dei pistoni a stelo.
Un‘elevata quantità di pressione potrebbe crearsi anche nel caso che
il £uido idraulico, emesso dalla camera del pistone a stelo, fosse fortemente soffocato/strozzato. Questo fattore è importante e da prendere in
considerazione nel momento della scelta delle valvole e le loro apposite
connessioni.
I cilindri con pistone a stelo singolo sul lato vengono chiamati anche cilindri differenziati, a causa delle diverse misure delle aree delle superci
dei pistoni. Mentre i cosi chiamati cilindri „balanced running cylinder“
possiedono un pistone a stelo su ognuno dei due lati.
Questi cilindri hanno la stessa supercie d‘area. Perciò essi producono
la stessa quantità di forza su tutte e due le direzioni e hanno la stessa
velocità di moto direzionale.
Alcuni cilindri idraulici hanno una „end position damping“. Questa ammorbidisce l‘impatto del pistone una volta raggiunta la posizione nale.
Inoltre sono necessari quando si lavora a velocità molto elevate, oppure
quando devono essere spostati carichi molto pesanti e rallentati non
appena raggiunta la posizione nale.
L‘apertura necessaria per far fuoriuscire il £uido idraulico verso l‘esterno,
viene chiusa da una parte del pistone, leggermente prima che esso
raggiunga la posizione nale. Un‘apertura ulteriore, connessa ad un
„adjustable choke“, rimane libera, permettendo di regolare il „throttling“-soffocamento/strozzamento--. La valvola di controllo viene connessa
parallelamente con il „choke“, in modo da posizionare a propria scelta la
direzione dello strozzamento.
La sezione del pistone, la quale chiude l‘apertura libera del tubo di scarico, può essere supportata da scanalature oppure da fori da trapano.
Questo previene da un‘improvviso inizio dello strozzamento, ma potrebbe
causare un impatto indesiderato.
95
Minos
Tecnica del £uido
Oltre ai cilindri a doppia azione, qui sopra descritti, esistono molti altri
tipi di costruzione.
Due cilindri possono essere connessi in serie in modo da aumentare la forza generata. La lunghezza complessiva di questi cilindri „tandem“ è quasi
due volte maggiore a quella di un cilindro con una corsa comparabile. La
forza loro esercitata è quasi il doppio se si confronta con un cilindro con
lo stesso diametro del pistone. Questa costruzione viene usata quando
il diametro del pistone non puo superare una determinata misura.
I cilindri a moto rapido sono usati se si necessita di alte velocita. La costruzione è simile a quella di un cilindro a telescopio ad azione doppia. Nella
prima parte della corsa fuoriesce il pistone a moto rapido, generando una
piccola forza e un‘alta velocita. Dopodichè „the working stroke starts“ e la
pressione viene applicata sull‘intera area della supercie. L‘intera forza
viene espulsa a bassa velocità. I cilindri a moto rapido vengono usati ad
esempio nelle presse.
Costruzioni ad alette vengono utilizzate per generare un moto oscillante.
Le alette vengono montate su di un albero e possono ricevere la pressione da tutte e due i lati. L‘involucro determina l‘amplitudine del moto.
È possibile raggiungere valori superiori ai 300°.
Il cilindro a pistone rotante ha una costruzione simile a quella die cilindri
per l‘oscillazione. Esso ha una forma ricurva e muove all‘interno del tubo
curvo del cilindro.
2.5.3
Fissaggio dei cilidri
Ci sono molti metodi per ssare un cilindro idraulico. In genere il ssaggio
puo essere di tipo £essibile o in£essibile. Cilindri a montaggio in£essibile
vengono riforniti con £uido idraulico attraverso tubi e canali, mentre quelli
£essibili richiedono l‘ausilio di manichette.
La „forma costruttiva con piedi“ appartiene al metodo di ssaggio di tipo
in£essibile. Il cilindro viene ssato su tutte e due le estremità inferiori.
Tuttavia un montaggio in£essibile può essere eseguito per mezzo di una
£angia, che puo essere annessa alla testa oppure allo stelo del pistone.
Nel caso che il pistone venisse usato per applicare le forze nel momento
d‘uscita della sua corsa, allora la £angia deve trovarsi sulla testa del pistone. Al contrario, la £angia verrà applicata allo stelo nel caso il cilindro
dovrà generare la forza al momento del suo rientro.
Per un ssaggio £essibile viene applicata una testa a forca nella parte
inferiore del pistone. Il ssaggio £essibile nella parte intermedia del cilindro
viene chiamata „center pin“.
96
Tecnica del £uido
Minos
Il „rod eye“ permette la realizzazione di altri piccoli movimenti, oltre a quelli
oscillanti. La testa a due punte o un „rod eye“ possono essere montati
sul lato dello stelo del pistone. Ma è possibile che lo stelo disponga di
una unica lettatura.
Durante il ssaggio di un cilindro, con una corsa molto lunga, il pistone
potrebbe piegarsi. Per prevenire questo problema bisognerà calcolarne
il peso (buckling load). Il carico di lavoro è impostato al fattore 3,5.
Per denire il carico „buckling“ dobbiamo ricorrere al calcolo Euler servedoci dell‘ausilio delle colonne „buckling“. Il tipo di carico si denisce
a seconda del tipo di ssaggio. Il calcolo viene eseguito per il cilindro
insieme al pistone a stelo.
Il calcolo del carico „buckling“ è multiplo. Tuttavia è anche possibile servirci del diagramma di supporto distribuito dal produttore.
Figura 52:
cilindro idraulico con testa a forca
97
Minos
2.5.4
Tecnica del £uido
Motori idraulici
Il principio di costruzione dei motori idraulici è simile a quello delle pompe. A volte è possibile utilizzare queste pompe direttamente in funzione
di motori e senza dover ricorrere a nessun tipo di modica. Ma in altre
costruzioni questo non è possibile. Ciononostante è consigliabile di non
adoperare queste pompe in funzione di motori idraulici, perchè i motori
sono in parte diversi nella loro struttura e conseguentemente più efcienti.
A differenza delle pompe, la quantità del £usso, che passa attraverso i
motori, è chiamata capacità di assorbimento. Alcuni motori idraulici questa
capacità è costante per ogni giro. La velocità di rotazione di questi motori
può essere cambiata soltanto attraverso la quantità del £usso. In motori
con capacità di assorbimento variabile può essere cambiata anche la
frequenza di rotazione.
I motori idraulici sono divisi in alta e bassa velocità, a seconda della loro
velocità di rotazione. Motori che raggiungono una velocità inferiore ai 500
giri per minuto appartegono alla fascia bassa velocità.
I motori ad ingranaggi possono sopportare frequenze rotazionali molto
elevate di diversi rpm. Essi hanno una capacità di assorbimento costante
e la loro costruzione e il loro principio di funzionamento è simile a quello
delle pompe ad ingranaggi.
Motori a ingranaggi possono avere una o due direzioni di rotazione. Quelli
a doppia direzione di rotazione vengono chiamati anche reversibili, e sono
caratterizzati da una forma di costruzione interna di tipo simmetrico. Motori a direzione unilaterale hanno „otturatori di pressione“ (pressure ratio
sealing)al loro interno. In questo caso non è permesso di intercambiare
i lati della alta e bassa pressione.
Per iniziare la rotazione viene applicata la pressione alla connessione di
pressione ad alta velocità, e di conseguenza alla ruota di ingranaggio,
esercitando un movimendo torcente sull‘albero. La perdita d‘olio £uisce
all‘interno della riserva attraverso connessioni separate.
I motori a pistoni assiali sono anch‘essi paragonabili a quelli delle pompe
a pistoni assiali. Anche i principi del piattello (swashplate) e dell‘asse
inclinato (bent axis) sono usati anche per questi motori. La frequenza di
rotazione e il momento torcente possono essere cambiati modicando
l‘inclinazione. Anche la direzione di ruotazione può essere invertita.
I motori a pistoni assiali sono molto compatti e possono essere usati ad
esempio come motori da trazione per macchine a lento movimento. In
questo esempio il motore guiida le ruote senza l‘intermediazione degli
ingranaggi.
98
Tecnica del £uido
Minos
I motori a pistoni radiali, come le pompe, possono essere pressurizzati
dall’interno o dall’esterno. Se i pistoni spingono un „Eccenter“ all‘interno,
verrà compiuta una corsa per giro e per pistone.
Nelle costruzioni inverse i pistoni premono dall‘interno le pareti a forma
d‘onda dell’involucro. Nelle estremità inferiori dei pistoni vengono assemblati dei rulli che permettono di moderare la forza d’attrito. I pistoni
compiono diverse corse per giro. Perciò questi motori sono più adatti per
frequenze di rotazione non molto grandi.
I motori a pistoni radiali hanno una capacità di assorbimento costante. È
possibile accorciare sino a metà la lunghezza di corsa dei pistoni. Questo
raddoppia la frequenza di rotazione e diminuisce la forza torcente.
Un’altro motore a bassa velocità è il cosi chiamato gerotor. Esso può
essere comparato alle pompe ad ingranaggi interni, all’interno della quale
gli ingranaggi possiedono un dente in meno rispetto a quelle esterne. La
pressione fa girare la ruota interna „lurching“ su quella esterna. L’albero
motore connette le ruote interne con l’albero di trasmissione. Un giro
completo della ruota corrisponde al giro completo di un dente che ruota
intorno all’albero di trasmissione.
Figura 53:
motore Gerotor (immagine di: BoschRexroth)
99
Minos
Tecnica del £uido
I motori gerotor sono compatti e robusti. La loro capacità di assorbimento
è molto elevata e costante e permette loro di generare una grande forza
torcente per una frequenza di rotazione molto bassa.
Alcuni produttori propongono differenti tipi di motori idraulici. Alcune
costruzioni sono simili a quelle delle pompe rotative a palette, che vengono pressurizzate per ottenere la torsione. In altre costruzioni dei „rotary
slide“ funzionano da sigilli per coprire lo spazio che intercorre tra le palette.
2.6
Condotti e tubi flessibili
Il £uido idraulico viene trasportato dalla pompa al „consumatore“ per
mezzo di tubi idraulici, stabili e molto resistenti. I tubi £essibili vengono
utilizzati per connettere componenti mobili.
Per diminuire l’uso di condotti e tubi £essibili, molti componenti, come le
valvole, possono essere connessi l’uno con l’altro. Questo metodo viene
chiamato „chaining“ (seriale, a catena). Attraverso questo metodo i £uidi
scorrono attraverso l’apertura di un primo componente no a raggiungere
l’altro.
Condutture e tubi £essibili vengono tesi da forze interne e forze esterne.
Il compito primario è quello di trasportare la pressione generata dalla
pompa, la quale necessita di un derminato spessore e solidità delle pareti.
Bisogna prendere in considerazione che possono accumularsi pressioni
più elevate di quelle generate dalla pompa durante la loro trasformazione.
L’estensione, causata dal calore o dall’oscillazione, comporta una ulteriore tensione dei tubi. Quindi è opportuno prevenire i tubi da eventuali
deformazioni e inclinamenti del raggio. In generale è bene prevenire
ogni tipo di piegatura, perchè possono riscontrarsi sempre perdite di
pressione. Apposite aperture di ventilazione, nella parte superiore della
pompa, servono a rimuovero l’aria al’interno dei tubi.
Per determinare il diametro dei tubi è necessario calcolare la media della
velocità del £usso. Molti tubi devono far scorrere l‘intero £usso del volume alimentato dalla pompa. In questo caso, la velocità del £usso deve
essere di circa 4 e 6 m/s. Velocità superiori devono essere raggiunte
soltanto con la ressione.
Per prevenire la fomazione di cavitazioni la media della velocità del £usso
non deve superare 1 m/s. Perciò il dametro del tubo di immissione è più
largo di quello della pressione. I tubi che riconducono al serbatoio devono
essere appropriati a bassa velocità, equivalente circa a 3 m/s.
100
Tecnica del £uido
Minos
Connessioni separabili delle tubatura vengono fabbicrate con connessioni
a dado o ad anello. Il bordo appuntito dei sigilli ad anello viene pressato
verso il tubo formando una connessione compatta. Per tubi molto larghi
vengono usate delle £ange.
Giunte oscillanti permottono di conettere due parti mobili. Le forze sviluppate vengono assorbite da un cuscinetto. Piccole forze sono quindi
sufcienti per il movimento attuale.
I tubi fessibili sono fatti di gomma resistente all‘olio, rivestiti da un reticolato
di tela o d‘acciaio, per aumentarne la resistenza. Sottopressione il tubo
si estende di poco, facendo crescere la resiliensa totale dell‘intero dispostivo draulico.Questo effetto viene utilizzato per attenuare l‘oscillazione.
Separatori rapidi vengono usati con tubi di connessione separabili. Essi
possono essere disconnessi soltanto in mancanza di pressione.
Le connessioni devono essere costruite senza creare dei nodi. Essi non
non devono presentare contorsioni. Per prevenire piccole piegature devono pendere possibilmente verso il basso.
Figura 54:
connessioni per tubi flessibili
101
Minos
2.7
Tecnica del £uido
Valvole di controllo di direzione
La trasformazione di energia dalla pompa ai dispositivi idraulici viene eseguita da valvole differenti. Le valvole di controllo di direzione accendono
e spengono i motori o cilindri e invertono la direzione del moto. Per poter
controllare la quantità del £usso e la pressione queste valvole devono
connettere o disconettere i differenti tubi idraulici.
A seconda del tipo di costruzione le valvole di controllo di direzione
possono essere suddivise in valvole con sede o a spola. Le valvole a
pistoni ruotanti e pistoni longitudinali appartengono alla categorie delle
valvole a spola. Al giorno d‘oggi vengono utilizzate principalmente le
valvole a pistoni longitudinali, perchè essere possono essere controllate
da elettromageti.
Nelle valvole a pistoni longitudinali il pistone slitta all‘interno del tubo
cilindrico dell‘involucro. A seconda della sua posizione al dispra della
corsia di sxcorrimento, porte differenti vengono connesse o bloccata.
Le forze della pressione si compensano le une con le altre sulla slitta del
pistone, è per questo che le forze operative delle valvole a pistone sono
molto piccole. Gli elettromagneti all‘interno dei controlli elettrici sono di
conseguenza molto piccoli. A seconda del tipo di costruzione del della
slitta del pistone e le porte dell‘involucro possono essere prodotte diverse
quantità del £usso.
A
P
Figura 55:
102
T
valvola a sede (immagine di: BoschRexroth)
Tecnica del £uido
Minos
Tra la slitta del pistone e l‘involucro intercorre uno spazio a forma di anello.
Questo rende le valvole a pistone non del tutto resistenti alla sporcizia.
Queste valvole infatti sono particolarmente sensibili a piccole impurità che
vanno a depiositarsi all‘interno di questo spazio, e possono essere causa
di problemi durante loscorrere del pistone. Elementi impuri, di dimensione
più grande, causano meno problemi, infatti data la loro grandezza essi
passano attraverso le aperture della valvola.
Le valvole a sede contengono sigilli sferici o a forma di cono. Questi vengono pressati dal loro perno attraverso l‘ausilio di molle. Uno „stantuffo“/
pistone viene usato per premere il corpo del perno in direzione contraria
a quella della forza prodotta dalla molla, che permette il passaggio del
£uido. La pressione deve sempre agire nella stessa direzione della forza
elastica. Se viene applicata la pressione alle valvole a sede nella direzione
sbagliata, essa spingere il „sigillo“ in direzione contraria alla forza elastica.
Di conseguenza le valvole di controllo di direzione non funzioneranno.
La pressione applicata sulle valvole, collocate in posizione di blocco,
spingono il corpo del sigillo insieme alla forza prodotta dalla molla contro
il suo perno. Queste forze accrescono con la pressione, per questo motivo le valvole a sede sono praticamente prive di sigillo. Tuttavia vengono
usate di più valvole semplici, con minor numero di porte, di quelle a sede.
Poichè non vi è essun movimento di slitta tra il corpo della valvola e
l‘involucro, le valvole a sede presentano meno problemi nei confronti di
piccole impurità. Tuttavia elementi più grandi possono insinuarsi tra il
corpo del sigillo e il suo perno.
2.7.1
Indicazioni delle valvole di controllo di direzione
Le valvole di controllo di direzione vengono indicate con due numeri
separati da uno slash (barra diagonale). Il numero delle porte si trova
davanti allo slash, mentre dall‘altro lato viene riportato il numero delle
posizioni. Molte valvole di direzione di controllo idraulico hanno quattro
porte e due tre posizioni di cambio. Esse vengono indicate come 4/2
oppure 4/3. Sono possibili anche altre combinazioni. bloccando una delle
uscite, ad esempio, cambiera il valore di 4/2 in 3/2.
A differenza dei pneumatici, le porte vengono marcate dalle lettere. La
porta della pressione viene indicata dalla lettera P. Le valvole di controllo di direzione che possiedono quattro porte hanno due „working port“,
indicate dalle lettere A e B. La linea che riconduce (il £uido)Dal serbatoio
viene indicata con la lettera T.
103
Minos
Tecnica del £uido
Nei simboli delle valvole di controllo di direzione le cassette delle due posizioni di cambio, vengono assegnate con le lettere A e B. Se le posizioni
fossero tre, alla cassetta intermedia verra assegnato il numero 0. Queste
valvole possono cambiare, partendo dalla cassetta intermedia, su una
delle due posizioni circostanti. La posizione di riposo verra assegnata
quando la valvola non è operativa. essa viene indicata solitamente alla
cassetta di destra.
Nell‘idraulica le valvole di controllo di direzione, con tre posizioni assegnabili, le posizioni intermedie assumono un‘altra funzione. Le posizione
di blocco intermedie vengono utilizzate per fermare i motori o i cilindri. In
questo caso tutte le posizioni vengono chiuse le une verso le altre. Una
pompa a modo costante produce sempre una pressione completa. La
quantità di volume passa attraverso una valvola di controllo di pressione
per tornare al serbatoio.
D‘altra parte nella circolaizione delle posizione medie la porta della pressione viene connessa con la porta della riserva. La pompa guida di nuovo
nel serbatoio e quasi senza pressione la quantità del £usso. Entrambe
le porte vengono bloccate come nella posizione di blocco intermedia. La
circolazione senza pressione consuma meno energia, e consequentemente mantiene basso il riscaldamento del £udo.
Tuttavia la pressione non è più applicata ad altri „consumer“ daurante
la circolazione senza pressione. Questo si può prevenire connettendo
diverse valvole con circolazione nella posizione media in serie. Questo
problema potrebbe essere ridotto se si accendessero tutti i „consumer“
contemporaneamente.
Un‘altra posizione media connette insieme tre porte delle quattro porte. Questo permette di applicare la pressione su tutte e due le porte
operative oppure di connetterle al serbatoio. Questa è la cosi chiamata
„chair middle position“ (posizione intermedie seriali). In alcune posizioni
intermedie tutte e quattro le porte vengono connesse insieme. Le valvole che dispongono più di quattro porte permettone ulteriori variazioni.
2.7.2
Posizioni di cambio sovrapposte
Per poter accendere e spegnere rapidamente i dispositivi, le valvole di
controllo di direzione agire/cambiare velocemente. Tuttavia un rapido
aprirsi e chiudersi delle valvole comporta picchi di pressioni indesiderate
all‘interno del £uido.
Perciò gli angoli di controllo sono caratterizzati da spigoli e tacche. Questo
ne riduce l‘accelerazione del £uido.
104
Tecnica del £uido
Minos
Attraverso lo spostamento delle slitte delle valvole si aprono o si chiudono
diverse porte delle valvole di controllo di direzione. La sequenza di procedura viene indicata con il concetto di sovrapposizione „overlapping“.
Nella sovrapposizione positiva la slita si muove blocando una delle porte
prima che la porta successiva viene aperta. Durante lo spostamento tutte
le porte sono bloccate per un breve periodo di tempo. Questo previene
da ogni da ogni £uido senza controllo che passa attraverso la valvola di
controllo.
Mentre nela sovrapposizione negativa tutte le porte vengono9 connesse
insieme per un tempo breve, durante il movimento della slitta. Una delle porte si apre brevemente prima che l‘altra si blocchi. Questo riduce
l‘impatto della pressione.
La sovrapposizione zero necessita di un‘alta precisione durante la fabbricazione delle valvole. Le porte si aprono e si bloccano allo stesso
tempo. Questo offre come vantaggio la possibilità di usare entrambe le
sovrapposizioni, positiva e negativa.
I diagrammi di controllo vengono usati per rappresentare gracamente
lo spostamento della sovrapposizione. La sovrapposizione negativa o
positiva viene rappresentata come posizione intermedia, con una cassetta
aggiuntiva nel simbolo delle valvole di controllo di direzione.
Ü
Figura 56:
Ü
sovrapposizione della valvola (immagine di: BoschRexroth)
105
Minos
2.7.3
Tecnica del £uido
L’uso delle valvole di controllo di direzione
A seconda del loro uso le valvole di controllo di direzione possono operare manualmente, maccanicamente, elettricamente, utilizzando bobine
magnetiche, pneumaticamente oppure idraulicamente. Valvole di controllo di misura più piccola possono operare in modo diretto. Il segnale
di controllo per le valvole di controllo più grandi invece viene amplicato
prima di tutto attraverso l‘utilizzo delle valvole di pilota di controllo. Il pilota di controllo viene utilizzato principalmente per le valvole di controllo
alimentate elettricamente.
Le valvole di controllo che operano manualmente vengono fornite di solito
di una leva. Le valvole di controllo con due posizioni di cambio vengono
ausiliate da una molla per compiere il loro rientro. Mentre, per le valvole
a tre posizioni di scambio, le molle vengono utilizzate per spostare le
valvole nella posizione intermedia quando esse non sono operative.
Nelle valvole di controllo chiusura, quando la valvola non è operativa la
posizione di cambio rimane invariata.
Le valvole di controllo che operano meccanicamente vengono spesso
fornite di un rullo. Esso viene attivato da componenti meccaniche, come
la camma e camma a disco. Per riportare alla posizione di partenza il
pistone viene adoperata una molla.
Le valvole di controllo di direzione possono operare anche attraverso
l‘utilizzo di pressione idraulica o pneumatica. La pressione spinge il
pistone delle valvole di controllo. Le valvole funzionanti a pressione
idraulica hanno l‘area della supercie del pistone più piccola rispetto a
quelle operanti a pressione pneumatica, perchè le pressioni idrauliche
sono decisivamente superiori a quelle pneumatiche.
Le valvole di controllo alimentate elettricamente vengono usate principalmente in sitemi automatizzati. Per operare su una valvola di controllo di
direzione a due posizioni di cambio è sufciente una bobina magnetica.
Per tre posizioni sono necessarie due bobine. Le molle vengono utilizzate
per riportare le valvole al loro punto di partenza o nella loro posizione
intermedia.
Il consumo della corrente dei magneti è indipendente dalla posizione del
bar, ciò signica che la bobina non brucierà in caso di „slider clamping“.
„The switching is smooth due to a longer switching time“. When turning
off a spark quenching shuold be provided at the contacts.“
I dispositivi di corrente diretta sono a lunga durata.
Magneti a corrente alternata consumano molta corrente al momento della
partenza del pistone. Questa forza è più grande di quella esercitata al
momento del rientro. Perciò „il tempo di cambio“ è più breve, ma in caso
di „slider clamping“ la bobina può prender fuoco. „However, there is non
need for a spark quenching.“
106
Tecnica del £uido
Minos
Le bobine magnetiche „bagnate“ vengono lavate dal £uido idraulico.
Questo previene la loro corrosione e dissipa il calore. I magneti „switch
smoother“ a causa dell‘attrito del £uido idraulico. Le bobine magnetiche
devono essere a prova di pressione.
Nelle costruzioni „asciutte/a secco“ delle bobine magnetiche „the pusher“,
il quale opera sulle guide della valvole, necessitano di una guarnizione.
Per muovere il „pusher“ è richiesta una grande forza per prevalere sulla
forza d‘attrito.
In ambienti a rischio di esplosione vengono utilizzate bobine magnetiche
speciali.
Le valvole di direzione a controllo elettrico possono operare anche con
un supporto manuale di operazione. Questo permette di azionare le
valvole senza elettricità. L‘operazione di supporto manuale deve essere
usata con cautela per poter prevenire ogni tipo di movimento indesiderato
all‘interno del sistema.
Figura 57:
valvole di controllo di direzione a funzione elettrica (figura di: BoschRexroth)
107
Minos
2.8
Tecnica del £uido
Valvole di blocco
Le valvole di blocco/serraggio arrestano il £uido in tutte e due le direzioni. Quest‘azione di blocco può essere effettuata usando una valvola di
blocco a palla. Perciò questi tipi di valvole appartengono alla categoria
delle valvole di controllo di direzione.
Le valvole a sede vengono utilizzate per poter arrestare il £uido da una
sola direzione. Questa costruzione previene dalla perdita d‘olio sul punto
di blocco. Allo stesso tempo il £uido che scorre nella direzione opposta
deve essere incontrastato. Queste valvole vengono più comunemente
chiamate valvole di ritegno.
Il corpo della guarnizione può essere a palla, a cono o a disco. La molla
preme la guarnizione sul suo perno. La forza della molla è relativamente bassa perchè essa deve essere sopraffatta dal £uido in di direzione
d‘apertura per aprire la valvola. Per aprire la valvola opposta alla direzione
della forza esercitata dalla molla la pressione varia a seconda del tipo di
costruzione, e si aggira attorno al valore di 0,5 no 5,0 bar.
In posizione d‘arresto la molla agisce per mantenera chiusa la valvola.
Tuttavia gran parte della forza viene esercitata dalla pressione. La posizione „d‘installazzione“ non è importante. Le valvole di blocco senza molla
devono essere montate in posizione verticale. Il corpo della guarnizione
si muove no alla supercie attraverso il suo peso stesso.
Le valvole di ritegno vengono utilizzate per prevenire le perdite delle
valvole di controllo di direzione con il pistone a guida. Questo previene,
ad esempio, „ the unwanted sinking of loads.“ Le valvole di ritegno di
connessione e di £uido, in parallelo, permettono di far scorrere il £uido in
una unica direzione. Nella direzione opposta il £uido „by-passa“ le valvole
da £uido attraverso le valvole di ritegno aperte.
Le valvole di ritegno vengono usate anche quando più pompe vengono
connesse insieme da un unico tubo. Esse prevengono il ri£uire del £uido
nella direzione opposta tra una pompa e l‘altra. Esse possono essere
usate anche il drenaggio die tubi e die serbatoi.
Una costruzione speciale delle valvole di ritegno è connessa parallelamente con i ltri. L‘aumentare dell‘otturazione die ltri incrementa anche
la pressione. Le valvole di ritegno si aprono in modo opposto dalla forza
esercitata dalla molla e permette al £uido di by-passare i ltri. Ma in questo
modo il £uido non viene più ltrato.
Le valvole di ritegno a circuito chiuso vengono usate per compensare la
fuoriscita dell‘olio idraulico.
108
Tecnica del £uido
Minos
Nella maggior parte die casi l‘arresto delle valvole di ritegno è necessario solo per un breve periodo di tempo. Per esempio, se una valvola di
ritegno viene usata per prevenire un „sinking of load“ indesiderato, esso
deve essere aperto „quando si desidera l‘abbassamento“. In questo caso
vengono usate valvole di ritegno sbloccabili.
Le valvole di ritegno vengono utilizzate nelle presse idrauliche come
cilindri „prell“. Essi lasciano passare una grande quantità d‘olio dal
contenitore ausiliare alla pressa del cilindro durante la corsa „anticipata.“
Durante la corsa di rientro del pistone il £uido idraulico ri£usce nel contenitore. Le valvole prell vengono chiuse durante l‘operazione di „pressa“.
Lo sblocco, in molti casi, può essere eseguito idraulicamente. Per sbloccare le valvole di ritegno la pressione viene applicata da una porta
aggiuntiva. La pressione agisce su un pistone, il quale trascina il corpo
della guarnizione, no a sbloccare le valvole.
„To unblock a double action cylinder, the control pressure at each side of
the cylinder is taken trough a branch line from the inlet pipe at the other
side respectively. Two unblockable check valves for both inlet pipes of
the double action cylinder may be arranged in one housing.“
B
A
X
Figura 58:
valvola di ritegno sbloccabile (figura di: BoschRexroth)
109
Minos
Tecnica del £uido
Le valvole di ritegno sbloccabili posso essere avvitate anche direttamente
alla vite della porta del cilindro. Nel caso di rottura di un tubo, all‘interno
del condotto, i cilindro si arresterà. Certe protezioni di anti rottura sono
necessarie ad esempio nelle „lifting platforms“.
Le valvole di ritegno sbloccabili ed a controllo diretto si sbloccano rapidamente aprendo sbocco per il £uido. Questo però può provocare pressione
o forti scariche all‘interno del dispositivo idraulico. Per prevenire che ciò
avvanga vengono utilizzate valvole di ritegno sbloccabili con il pilota di
controllo.
Il pilota di controllo permette di aprire un buco con una piccola area di
sezione a croce. Questa è in grado di ridurre lentamente la pressione.
Dopodichè si apre. Il pilota di controllo rende possibile alle valvole di
ritegno sbloccabili, di operare a basso controllo di pressione.
Le valvole di ritegno sbloccabili sono in grado di funzionare anche meccanicamene o elettricamente. La funzione di sblocco è la stessa, soltanto
il metodo è differente.
Le valvole usate per una combinazone logica dei segnali sono appartengono alle valvole di blocco. Nelle valvole di ritegno alternate due
valvole vengono connesse ad un modulo composto da due entrate ed
una uscita, ed al loro interno si trova anche „retaining element“ capace
di muoversi liberamente.
Quando viene applicata la pressione si uno dei due ingressi „the retaining
element“ blocca l‘altro. La pressione però può essere applicata anche
all‘uscita. Se a tutte e due porte d‘ingresso viene applicata la pressione,
allora essa aumentará sulla porta d‘uscita. Se su tutte e due le entrate
viene applicata una stressa quantità di pressione, la posizione del „ritaining element“ rimane incerta. Questo tipo di prestazione viene denita
logica o funzione.
110
Tecnica del £uido
2.9
Minos
Valvole di pressione
Le valvole di pressione mantengono costante un determinato valore della
pressione, oppure possono abbassarne il valore attuale. Esse possono
accendere o spegnere diversi componenti situati nei dispositivi idraulici.
Le valvole di pressione possono dividersi in due tipi fondamentali. Le
prime sono le valvole di controllo di pressione. Esse solitamente si arrestano in mancanza di pressione. Mentre a pressione troppo elevata
esse si aprono.
Le altre sono le valvole di riduzione di pressione. Queste rimangono
aperte in macanza di pressione.Esse si chiudono soltanto quando il
valore desiderato viene raggiunto.
2.9.1
Le valvole di controllo della pressione
Ogni dispositivo idraulico possiede una o più valvole di controllo della
pressione. Esse possono essere adoperate per proteggere la pompa dalla
formazione di pressioni elevate. Le ciondutture a cui vengono connesse
queste valvole non devono essere di tipo bloccabile.
Figura 59:
valvole diretta di controllo della pressione (BoschRexroth)
111
Minos
Tecnica del £uido
Se non ci fosse un „consumatore“ del £uido, prodotto dai meccanismi
idraulici con una pompa a modo costante, la sua intera quantità sarebbe
costretta a passare attraverso le valvole di controllo della pressione per
poter tornare indietro all’interno del serbatoio. L’energia della pressione
viene trasformata in calore. La valvole di pressione mantengono ancora
la pressione al loro interno nel valore modicato.
Le valvole valvole di controllo della pressione piccole sono direttamente
operative. È possibile utilizzare le stesse costruzioni delle valvole con
sede o a spola. In tutte e due la pressione agisce su una supercie che
viene spinta in direzione opposta dalla forza prodotta dalla molla. La
valvola si apre non appena la forza della pressione è superiore a quella
della molla.
Modicando la forza della molla è possibile impostare diversi valori
d‘apertura della pressione. L‘utilizzo dei „damping or throttling pistons“
previene dall‘oscillamento del corpo della valvola.
Il vantaggio delle valvole con sede consiste nella loro capacità rapida di
aprirsi e di bloccarsi. D‘altra parte però le valvole a spola permettono un
controllo molto ne, a causa delle tacche presenti nella loro guida/slitta.
Le valvole a controllo diretto di pressione, per poter lavorare con quantità di £uido molto grandi, necessitano di una maggiore forza che dovrà
essere esercitata dalla molla. Di conseguenza hanno bisogno di valvole
di costruzione più grande e con maggiore forza di scambio. Le valvole
di controllo della pressione con pilota di controllo sono più adatte per
questo tipo di esigenze.
Le valvole di controllo della pressione con pilota di controllo consistono in
una valvola principale e una valvola di controllo pilota. Il corpo della valvola principale è pressurizzato su di un determinato punto del suo corpo.
Un piccolo „starter/choke“ passa la pressione nella direzione opposta,
cosicchè la forze possano compensarsi le une con le altreLe valvole rimangono chiuse per mezzo di una molla. Poichè le forze
della pressione, nelle valvole di blocco, si compensano le une con le
altre, minore sarà la forza necessaria prodotta dalla molla.
La valvola di controllo diretto della pressione viene usata per limitare la
pressione nella valvola principale. La valvola pilota si apre quando eccede il valore della pressione modicato. La quantità del £uido che può
passare attraverso „il choke“ è limitata. La differente pressione che ne
risulta sposta il corpo delle valvole ed essa si apre.
112
Tecnica del £uido
Minos
Il £uido idraulico che passa attraverso la valvola pilota, può ri£uire nel
serbatoio attraverso il tubo di ritorno della valvola principale. Tuttavia
questo potrebbe provocarne il formarsi della pressione nel suo interno,
cambiando consequentemente anche il valore della pressione della
valvola pilota.
Per prevenire che ciò avvenga, il £uido della valvola pilota viene ricondotto
al serbatoio separatamente da quello della valvola principale. A seconda
dello „stop plug installation“ il tubo delle valvole di controllo della pressione
possono essere installati in modi differenti.
Nei sistemi di controllo remoti, la valvola di controllo viene installata in
un posto differente e lontana dalla valvola principale. Questo permette
di installare la valvola principale vicino al dispositivo idraulico, ed in questo modo sarà facile all‘operatore accedere a quella pilota. Entrambe le
valvole sono connesse tra di loro attraverso una piccola area di sezione.
Connettere una valvola di controllo di direzione in parallelo con una di
controllo pilota ne riduce il controllo della pressione non appena le valvole di direzione si aprono. In questo caso la si aprirà anche la valvola
principale. È possibile utilizzare questo sistema, ad esempio, in sistemi
di circolazione senza pressione per mezzo di piccole valvole di controllo
di direzione. Quando si usa una pompa costante, questa permette di
alimentare il £uido idraulico indietro nel serbatoio senza un grosso consumo di energia.
Figura 60: valvola di controllo di pressione con pilota di controllo (immagine
di: BoschRexroth)
113
Minos
Tecnica del £uido
Connettendo parallelamente diverse valvole pilota, con controlli di pressione differenti, permette di modicare pressioni differenti nella valvola
principale. Le valvole pilota vengono accese o spente attraverso piccole
valvole di controllo di direzione.
Fondamentalmente è possibile controllare più valvole principali allo
stesso tempo per mezzo di una sola valvola pilota. Ma questo potrebbe
provocare l‘oscillazione della valvola principale.
Le valvole di controllo di limite della pressione possono svolgere anche
altre funzioni oltre a quella di limitare la pressione. Esse hanno una
costruzione simile alle valvole di controllo della pressione ma vengono
indicate in maniera differente.
Le valvole d‘arresto sono valvole di pressione. Esse mantengono sottopressione l‘olio idraulico che ri£uisce dal cilindro. Il £uido idraulico richiede
una determinata pressione per iniziare a fuoriuscire dal cilindro, perciò
il pistone è pressurizzato in tuttu e due i lati. Questo stato è chiamato
„hydraulically clamped“.
Quest‘ultimo viene usato quando devono essere trainati carichi con pistoni
a stelo. Questo previene da ogni movimento incontrollato del cilindro. Le
valvole di ritegno devono essere connesse in parallelo con in modo da
permettere al £uido idraulico di scorrere liberamente in direzione opposta,
by-passando le valvole di pressione.
Le valvole di pressione, le quali applicano una pressione ulteriore una
volta raggiunto un determinato valore della pressione, vengono indicate
anche come valvole sequeziali. Ad esempio, un cilindro d‘alimentazione
scorre verso l‘esterno soltanto quando il cilindro di bloccaggio ha raggiunto
una certa pressione, raggiungendo così la forza di blocco.
Le valvole di ritegno vengono connesse parallelamente anche con le
valvole seriali, per prevenire che il £uido scorra indirezione opposta.
Le valvole seriali possono essere spente anche attraverso delle porte
di controllo separate. Queste valvole seriali di controllo esterne operano
nello stesso modo di quelle di direzione 2/2. Ma nelle prime è possibile
modicare il controllo della pressione. Nelle valvole seriali „self-directed“ il
controllo della pressione è disteso dalla linea d‘entrata delle valvole seriali.
114
Tecnica del £uido
Minos
Le valvole della pressione „cut-off“ sono simili alle valvole di sequenza.
Macchinari tipici che utilizzano queste valvole sono le presse. In esse è
possibile l‘utilizzo di due pompe per generare una portata comune che
permette il movimento dei cilindri.
Una delle pompe, che produce un valore di pressione molto basso, alimenta larga parte della portata, mentre l‘altra pompa agisce con l‘alta pressione su di una piccola quantità del £uido. Per ottenere un‘alimentazione
rapida del movimento entrambe le pompe lavorano insieme sin dall‘inizio.
Con l‘aumentare dello sforzo di una pressa aumenta anche la pressione
nel tubo d‘aspirazione dei cilindri. Le valvole della pressione sequenziali
rendono senza pressione il modo della circolazione del £uido nella pompa
che alimenta larga parte della portata. A questo punto la portata viene
alimentata soltanto dall‘altra pompa.
Un processo simile viene usato per riempire gli accumulatori idrici. Una
volta raggiunto il valore della pressione desiderato per il riempimento, le
valvole della pressione cut-off rendono senza pressione la circolazione
della pompa. Per prevenire le perdite del £uido idraulico dall‘accumulatore
viene utilizzata una valvola di ritegno.
2.9.2
Valvole di riduzione di pressione
Le valvole di riduzione della pressione vengono usate per ridurre la pressione nei dispositivi idraulici. Queste sostituiscono l eventuale utilizzo di
un altra pompa di diminuire la pressione.
Le valvole di riduzione di pressione piccole sono a controllo diretto, e
quelle usate per lavorare a larghe quantita di £uido hanno il pilota di
controllo. Il principio di costruzione e lo stesso delle valvole a spola. Esse
utilizzano un tubo singolo per lo scarico dell‘olio, che viene separato dai
tubi di quello principali perche sono sotto pressione.
Le valvole di riduzione di pressione ricevono pressione alla loro entrata.
Essa deve essere superiore al valore desiderato di trasformazione. Se
la forza della pressione di entrata `e minore del valore desiderato, essa
fuoriuscira l intero valore dall ingresso d‘uscita.
Le valvole di riduzione a controllo diretto dispongono di una valvola a
saracinesca„gate valve“, su cui su di un lato viene applicata la pressione
d‘uscita. Sull‘altro lato, mentre, viene applicata la forza prodotta da una
molla con valore regolabile. Quando il valore della pressione d‘uscita
`e inferiore la molla mantiene aperta la valvola. Le valvole si bloccano
soltanto attraverso l‘aumentare della pressione al di sopra del valore
desiderato e piu grandi della forza prodotta dalla molla.
115
Minos
Tecnica del £uido
La pressione d‘uscita, nelle valvole di riduzione di pressione con pilota di
controllo, viene applicata anche su di un lato della valvola a saracinesca
da un choke. Poiche tutte e due le forze della pressione si compensano l‘una con l‘altra la forza necessaria esercitata dalla molla, per poter
mantenere le valvole aperte, sara minima.
Come valvola pilota di controllo viene usata una valvola di controllo a
bassa pressione. Essa limita la pressione all‘interno dello spazio, dove `e
situata la molla. Una volta raggiunto il valore della pressione desiderato
la valvola si apre. Poiche la pressione d‘uscita e ancora applicata alla
valvola a saracinesca, la valvola principale rimane bloccata e la pressione,
dopo essere passata attraverso la valvola di riduzione, non aumenta.
Le valvole di riduzione di pressione generalmente si suddividono in
costruzioni a 2 direzioni e a 3 direzioni. In quelle a 2 direzioni viene ridotta
pre prima la pressione che si trova in posizione d‘uscita. Se la pressione
continua ad aumentare, a causa di in£uenze esterne, non sara possibile
ridurla.
Nelle costruzioni a 3 direzioni c e una ulteriore connessione al serbatoio,
che permette di ridurre la pressione di fuoriuscita. Le valvole di riduzione
di pressione funzionano come una valvola di controllo di pressione.
Figura 61: valvola di riduzione di pressione a 2 direzioni (immagine di:
BoschRexroth)
116
Tecnica del £uido
2.10
Minos
Valvole a flusso
Le valvole a £usso in£uenzano la quantita del £uido. Questo permette
di cambiare la velocita dei cilindri idraulici o motori. „The possibility of
stepless changing of the volume £ow and consequently the speed is
favourable in hydraulics.“
D‘altra parte pero, lo svantaggio di ridurre la quantita del £usso, e che
una parte dell energia e trasformata in calore. Questo aumenta del £uido
idraulico.
Le valvole a £usso hanno una costruzione molto semplice. Malgrado le
perdite d energia, causate dal decrescere del volume, queste valvole
sono molto usate. Tuttavia e possibile modocare la quantita del £uido
usando una pompa a £usso modicabile.
Pompe ad alimentazione costante producono una determinata quantita
di £uido. Se il „consumer“ richiede meno velocita, viene utilizzata una
valvola a £usso come separatore. La parte rimanente del £uido puo
raggiungere il serbatoio passando attraverso le valvole di controllo di
pressione oppure attraverso le valvole a £usso.
Le valvole a £usso piu importanti sono le valvole a „choke“ e le valvole
di regolazione del £usso.Le prime possiedono una costruzione semplice,
ma la quantita del £uido puo cambiare attraverso la pressione. Il secondo
tipo di valvole, mentre, sono in grado di bilanciare le pressioni differenti
e di mantenere costante la quantita del £usso.
Anche le valvole di regolazione del £usso possiedono un „choke“. Se
cambia la temperatura del £uido idraulico cambia anche il suo valore
di viscosita, che in£uenzera automaticamente il lavoro del „choke“. Per
questo e importante selezionare un modello di costruzione, che mantenga
basso il piu possibile il valore della viscosita.
Oltretutto i separatori del £uido passano anche attraverso le valvole a
£usso. Di solito essi vengono usati per dividire il £uido in parti eguali. Ad
esempio, questo puo essere usato per eseguire un‘espansione sincronizzata di due cilindri, indipendentemente dal loro carico.
117
Minos
Tecnica del £uido
2.10.1 Valvole a farfalla/ Valvole choke
Il £uido passa attraverso una sezione ristretta all‘interno delle valvole
choke. „The volume £ow value depends on the pressures before and
after the choke, as well as the cross sectional area of the restriction and
the £uid’s viscosity. The higher the pressure difference and the lower the
viscosity of the £uid the larger the volume £ow. “
Constant chokes have a constant cross sectional area of the restriction
area. Such constant chokes are used in different hydraulic components.
Depending on the construction, the restriction can be long and tubeshaped or short like an orice.
The restriction in a choke has a circular cross sectional area, which reduces the viscosity in£uence on the throttling. The circular form has the
largest ratio value of the area to the circumference.
The longer the restriction area the higher the viscosity dependence. Therefore, orices are frequently used. The fouling of chokes should be possibly avoided.
A
B
Figura 62:
118
valvola a farfalla (immagine di: BoschRexroth)
Tecnica del £uido
Minos
In the adjustable choke valves needle type chokes are used. The coneshaped needle partially closes the circular opening, leaving a ring-shaped
area open. A ne adjustment of the choke with small opening is difcult,
despite the circular cross section. The small opening is also more sensitive
to fouling.
Using a triangular cross section allows a ne adjustment of the choke,
using a sliding piston with a groove. The fouling hazard is considerably
lower. Such constructions are also called ne chokes. Rectangular sections are also used.
The chokes decrease the volume £ow in both directions. When a throttling
in one direction is required a check valve is connected in parallel with the
choke. This combination is called the check-choke valve.
Chokes are also used to switch cylinders from the rapid feed to the operation cycle. Hereby, the chokes are mechanically operated and turned
on by means of follower rolls. There is no sudden change to a slower
speed like when using directional control valves.
If the force generated by a running out cylinder with a throttled inlet increases, the pressure before the cylinder rises up. The pressure difference
at the choke falls down and the volume £ow decreases. If such speed
changes caused by variable loads should be avoided, the chokes should
not be used.
2.10.2 Valvole di regolazione di portata
Le valvole di regolazione di portata prevengono il cambiare della portata
quando cambia il „valore del carico del dispositivo“. Queste valvole hanno
un‘unica direzione di £usso, percio e sempre necessario connettere parallelamente ad esse una valvola di ritegno. Se le valvole di regolazione di
portata devono lavorare in tutte e due le direzioni e necessario ricorrere
all‘utilizzo din una „coppia di raddrizzatori di portata/£ow straightening
coupling“ insieme a quattro valvole di ritegno.
Le valvole di regolazione di portata contengono anch‘esse dei choke.
Questi vengono indicati come choke di misura. C‘e anche un choke di
regolazione del movimento al loro interno, meglio chiamato compensatore
di pressione. Nelle valvole di regolazione a due direzioni i choke vengono
installati uno dopo l‘altro. Mentre nelle costruzioni a 3 direzioni vengono
connessi parallelamente.
119
Minos
Tecnica del £uido
L‘ordine di misura e di regolazione dei choke non ha importanza nelle
valvole a 2 direzioni di portata. Il choke di regolazione rimane aperto n
a quando il £uido non piu presente al loro interno.
Quando il £uido passa attraverso le valvole di regolazione di portata viene a costituirsi, all‘interno die choke di misura, una pressione differente.
Essa viene applicata sulla loro supercie frontale.
Poiche tutte e due le superci die choke di regolazione sono uguali, e la
pressione minore, dopo essere passata atraverso i choke di misurazione, la forza mancante viene compensata dall‘ausilio della forza prodotta
dalla molla. La pressione nei choke di misurazione ammonta intorno ai
6 gli 8 bar. A seconda delle condizioni anche la pressione viene ridotta
dai choke di regolazione.
Attraverso l‘aumentare della forza aumentera anche la pressione nei
choke di misura. La pressione agisce sui lati frontali die choke di regolazione incrementando l‘area di sezione a croce alla loroapertura,
riducendo l‘effetto oscillante attraverso la regolazione degli oscillatori.
Di conseguenza, la pressione crescera prima di arrivare nei choke di
misurazione, e la pressione di differenza ritorna al suo valore originario
prima di cambiare.
A constant pressure difference at the measuring choke means a constant
volume £ow despite the change in operation conditions. A special case
is when the volume £ow is switched on. The regulation choke is initially
opened. A short time is needed till it reaches its working position. This
causes a starting jump of the operated cylinder. This can be prevented
by pushing the regulation choke mechanically, which makes it open
completely.
In a 3-directional £ow control valve the pressure difference at the measuring choke is also applied to the front sides of the regulation choke. The
excessive volume £ow is taken back to the tank through an additional
connection.
Since the 3-directional £ow control valve divides the £ow, there is no need
to feed the not required volume £ow back to the tank through a pressure
control valve. The pump must generate the pressure required by the
drive and the pressure control valve only. This reduces the warming of
the hydraulic £uid.
3-directional £ow control valves can be installed at the consumer’s inlet
only. It is impossible to connect several 3-directional £ow control valves
in parallel.
120
Tecnica del £uido
Minos
2.10.3 Divisori di portata
I divisori di portata vengono usati per dividere la portata solitamente in
due parti. Questo permette una sincronizzazione di diversi „consumer“
con carichi differenti.
Un pistone di regolazione nei divisori di portata di solito occupa la parte
intermedia. In questo caso le uscite della pressione vengono applicate
su di entrambi i lati frontali die pistoni di regolazione. Un incremento di
pressione, su di una delle uscite provoca lo spotastamento del pistone.
L‘aumento della pressione sull‘altra uscita e in grado di bilanciare nuovamente il pistone.
La divisione della portata e possibile anche attraverso l‘ausilio di due
motori idraulici. I motori devono avere la stessa capacita di assorbimento
e devono essere connessi all‘albero in modo meccanico.
La divisione della portata in parti uguali e possibile anche usando valvole
di regolazione di portata a 2 direzioni.
p
p
p
3
2
1
Figura 63: valvola di regolazione di portata a 2 direzioni (immagine di:
BoschRexroth)
121
Minos
2.11
Tecnica del £uido
Idro accumulatori
A differenza die gas e quasi impossibile comprimere i £uidi. Riempire
in un sebatoio un £uido pressurizzato non permettera nessun risparmio
d‘energia. Per poter prendere il £uido sottopressione e necessario l‘ausilio
di una forza aggiuntiva.
Qualche volta, per applicare la pressione sui £uidi, vengono utilizzati die
gas. E necessario pero l‘utilizzo di un separatore per prevenire che essi
si mischino assieme. E possibile utilizzare un diaframma o un pistone.
La forza di una molla, o il peso di un corpo, possono essere usati anche
per applicare forza ai £uidi. Anche in questo caso il £uido viene separato da un pistone a movimento libero. Un pistone senza stelo si muove
all‘interno di un involucro di forma cilindrica.
La reazione/controazione viene generata con un largo peso specico.
L‘accumulatore deve essere installato in modo verticale. L‘installazione
non e necessaria quando la controazione e generata da una molla meccanica. Tuttavia questi accumulatori difcilmente vengono ancora usati.
2.11.1 La funzione di un idro accumulatore
Le pompe di un dispositivo elettrico alimentano una determinata portata
che varia a seconda del loro tipo di costruzione. Se il dispositivo necessita di una grande quantita di £uido per un breve tempo, la pompa deve
essere pronta a generarlo.
Per lavorare con una pompa piccola, un accumulatore viene riempito
mentre la pompa lavora a bassa portata. Al contrario, se si necessita per un breve tempo di una maggiore portata, essa verra ricoperta
dall‘accumulatore. Una pompa piccola e in grado di consumare meno
energia, e anche il riscaldamento del £uido idraulico sara limitato.
Un‘altra possibilita di riempire l‘idro accumulatore consiste nell‘adoperare
un motore idraulico come risorsa d‘energia.
Gli idro accumulatori vengono utilizzati anche per mantenere costante
la pressione all‘interno del meccanismo per un lungo periodo di tempo.
Per poter piegare un pezzo da lavorazione la pompa non deve generare
energia per tutto il tempo.Possibile perdite possono essere compensate
con il £uido idraulico salvato all‘interno dell‘accumulatore.
122
Tecnica del £uido
Minos
Gli idro accumulatori vengono utilizzati per fornire il £uido idraulico quando
è necessario. In casi di emergenza, ad esempio un guasto energetico, gli
accumulatori garantiscono il funzionamento del dispositivo per un certo
periodo tempo. Anche attraverso l‘arresto dell‘alimentazione della pompa
i cilindri possono continuare a svolgere il proprio lavoro.
Alcune pompe producono pulsazioni nella portata. Anche il rapido alternarsi delle valvole può causare un‘improvvisa accelerazione o decelerazione del £uido idraulico. Gli accumulatori di pressione assorbono ed
indeboliscono l‘impatto della pressione e delle pulsazioni.
Gli idro accumulatori possono essere usati anche come molle idrauliche.
Questo permette di mantenere le giunte e le catene strette/in tensione.
Gli idro accumulatori bilanciano l‘oscillare della temperatura nei sistemi
chiusi e compensano i cambiamenti della portata del £uido idraulico.
2.11.2 Pistone accumulatore
Il pistone accumulatore consiste in un pistone senza stelo che scivola
all‘interno un tubo cilindrico. Il pistone separa il £uido idraulico dal gas.
L‘accumulatore a forma di cilindro possiede due porte, collocate nei due
rispettivi lati frontali. In una porta passa il £uido idraulico dentro e fuori. Il
gas viene applicato invece all‘altra porta, che viene usata per riempire di
nuovo. È possibile installare anche un‘ulteriore riserva contenete il gas.
Come tipo di gas viene usato l‘azoto.
I pistoni accumulatori devono essere installati in direzione verticale. In
questa posizione la porta del £uido si trova nella parte superiore del
pistone. Questo previene dal depositarsi delle impurità, che possono
corredere il pistone.
Una volta riempito l‘accumulatore il pistone slitta comprimendo il gas.
D‘altra parte quando il £uido deve essere alimentato all‘interno del sistema
il gas spinge il pistone e scorre indietro.
Lo spostamento del pistone deve superare la forza d‘attrito. Perciò, piccole portate di £uido possono provocare l‘effetto slip-stick del pistone.
Questo si deve prevenire attraverso un trattamento molto accurato sulla
supercie interna dei cilindri.
123
Minos
Tecnica del £uido
I pistoni accumulatori sono molto appropriati per pressioni elevate e grandi
portate. In molte costruzioni la posizione del pistone e consequentemente il livello del £uido viene monitorato da uno stelo. Questo permette di
regolare lo scambio delle pompe. I pistoni accumulatori sono molto più
costosi deigli idro accumulatori, a causa dell‘accurato trattamento che
essi necessitano.
2.11.3 Accumulatori a sacca e a membrana
L‘accumulatore a sacca è un serbatoio cilindrico. Le sue parti frontali
sono arrotondate. All‘interno del serbatoio si trova una sacca elastica
contenente azoto. La sacca aderisce alle pareti interne dell‘accomulatare
quando è vuoto.
Quando viene riempito il serbatoio con il £uido idraulico, la sacca e il gas
al suo interno vengono compressi. La grandezza della sacca si riduce e
i £uidi possono accedere all‘interno del serbatoio. La sacca si estende di
nuovo non appena il £uido idraulico fuoriesce dall‘accumulatore.
Figura 64:
124
accumulatore a sacca (figura di: BoschRexroth)
Tecnica del £uido
Minos
La porta del £uido idraulico è protetta da un congegno speciale. Esso
previene dall‘estensione della sacca nella connessione del £uido. La
sacca dispone di una porta propria, attraverso la quale essa viene riempita con azoto.
La forza d‘attrito, provocata durante i cambiamenti del volume della sacca, è molto bassa. Anche la massa della sacca è molto piccola, quindi la
forza d‘inerzia derivante dal riempimento e lo svuotamento, può essere
ignorata. Gli accumulatori a sacca di solito vengono installati in posizione
verticale. La porta della pressione è collocata nella parte inferiore. Il valore
massimo di immagazzinaggio equivale circa alla metà del contenitore.
Gli accumulatori a membrana sono molto simili a quelli a sacca. Attraverso
la membrana il £uido viene separato dall‘azoto, la quale divide il contenitore in due settori. Gli accumulatori a membrana hanno una forma sferica
o leggermente cilindrica. La membrana è installata approssimativamente
nel mezzo del contenitore.
A seconda del livello di riempimento la membrana si estende da uno dei
due lati. La posizione d‘installazione del suo accumulatore è facoltativa.
Principalmente gli accumulatori a membrana vengono usati per depositare
quantità di £uido non eccessive.
2.11.4 Riempimento degli indro accumulatori con gas sottopressione
Gli idro accumulatori a gas sottopressione vengono riempiti sempre con
azoto. Altri gas, come l‘ossigeno, sono esplosivi.
La quantità del gas non cambia durante la normale operazione degli idro
accumulatori. Le perdite di azoto sono molto basse. La pressione del
gas deve essere controllata prima di iniziare un‘operazione e dopo ogni
intervento di manutenzione. Alla consegna la pressione del gas negli idro
accumulatori può essere molto bassa.
La pressione del gas in un accumulatore vuoto viene indicata come carica della pressione. Per poter accedere all‘accumulatore i £uidi idraulici
devono avere una pressione minima equivalente alla „carica“.
La carica della pressione può essere calcolata riempendo il contenitore
per poi svuotarlo lentamente. La pressione del £uido idraulico scende
giù lentamente no a quando, arrivando in un punto dove il £uido scendera a picco. In questo momento l‘apertura dell‘alimentazione viene
chiusa dalla sacca o dalla membrana, impedendo al £udo di fuoriscire
dall‘accumulatore. Il valore della pressione equivale al valore risultante
prima della veloce fuoriuscita del £uido.
La pressione minima di un accumulatore deve permettere circa ad un
10% del £uido di rimanere nel contenitore. Questo percentuale impedisce
l‘avvio delle valvole di chiusura della sacca o della membrana.
125
Minos
Tecnica del £uido
Quando gli accumulatori vengono riempiti la loro pressione aumenta a
causa della pressione esercitata sui gas. In questo modo aumenta anche
la pressione, con la quale il contenitore deve essere riempito. Questo
permette di calcolare il valore massimo di pressione della pompa.
Dalla differenza del grado di riempimento, quindi dalla pressione massima
e minima consentita, è possibile ricavarne la quantità di £uido idraulico
utilizzabile. Se la differenza è molto bassa, la quantità del gas può essere aumentata attraverso l‘ausilio di un secondo serbatoio. Questo è
in grado di ridurre l‘incremento della pressione, quando l‘accumulatore
viene riempito, inoltre permette di aumentare il livello di riempimento.
Il riempiento rapido, oppure lo svuotamento del serbatoio/contenitore
può cambiare la quantità di £uido utilizzabole. In questo caso cambia la
quantità del gas, così come la sua temperatura. Quando selezioniamo
un accumulatore è importante prendere in considerazione questo fattore.
Gli idro accumulatori a riempimento a gas vengono considerati come
contenitori di pressione. Per questo sarà necessario un manometro per
potetr monitorare la pressione. Deve essere usata anche una valvola di
protezione o una valvola di sovrapressione. Le connessione per queste
valvole non devono essere di tipo bloccabile.
In Germania c`è un regolamento speciale per i contenitori di pressione.
Il regolamento prevede un controllo regolare degli accumulatori. Perciò
essi devo essere installati in posti accessibili.
126
MECCATRONICA
Modulo 4: azionamenti elettrici e
controlli automatici
Manuale
(concetto)
Matthias Römer
Università Tecnica di Chemnitz, Istituto di
macchine utensili e dei processi produttivi
Germania
Concetto europeo per la Formazione Continua in Meccatronica di
personale esperto nella produzione industriale globalizzata
Progetto UE no. 2005-146319 „Minos“, durata dal 2005 al 2007
Progetto UE no. DE/08/LLP-LdV/TOI/147110 „MINOS++“, durata dal 2008
al 2010
Il presente progetto è finanziato con il
sostegno della Commissione europea.
L´autore è il solo responsabile di questa
pubblicazione (comunicazione) e la
Commissione declina ogni responsabilità
sull´uso che potrà essere fatto delle
informazioni in essa contenute.
www.minos-mechatronic.eu
Azionamenti elettrici e controlli automatici
1
Le basi dell’elettrotecnica
1.1
Introduzione
Minos
L’elettrotecnica abbraccia l’insieme delle conoscenze tecniche che sfruttano l’effetto della corrente elettrica e le caratteristiche di campi elettrici
e magnetici.
Rientrano in tale ambito la produzione di energia elettrica, la sua trasmissione e il suo uso. L’energia elettrica non viene usata soltanto per
la propulsione di macchine, ma anche nella metrologia, nella tecnica del
$
e delle telecomunicazioni.
Il funzionamento di macchine o impianti moderni non è quasi più immaginabile senza l’impiego di energia elettrica. Anche in ambito meccanico,
pertanto, è un vantaggio avere conoscenze di base sulla funzione di
componenti elettrici, quali la capacità di poter leggere schemi elettrici.
Molti impianti lavorano con forme di energia miste. Alcune valvole per
esempio sono azionate tramite la corrente elettrica ma controllano pro
£
Generalmente correnti maggiori di 50 v di tensione alternata o di 120 v di
Per il lavoro con queste tensioni bisogna aver partecipato a speciali corsi
di formazione e avere il permesso di manovra. I lavori con basse tensioni
possono essere eseguiti da chiunque. Pertanto,durante le prove pratiche,
nei corsi di formazione si lavora con una tensione continua di 24 V.
7
Minos
1.1.1
Azionamenti elettrici e controlli automaticii
Sfera di competenza dell‘elettrotecnica
Di solito l’elettrotecnica si divide fra tecnica delle correnti forti e tecnica
delle correnti deboli. La prima viene chiamata anche tecnica dell’energia
elettrica e tecnica di azionamento elettrico. La tecnica delle correnti deboli
invece è diventata la tecnica delle telecomunicazioni.
Altri ambiti dell‘elettrotecnica sono l‘elettronica, la tecnica di misura elettrica e di regolazione
$$
>
dell’elettrotecnica ha dato vita a numerosi campi di specializzazione.
1.1.2
Tecnica dell’energia elettrica e tecnica d’azionamento elettrico
La tecnica delle correnti forti è attualmente denominata tecnica
dell’energia elettrica e riguarda la produzione, la trasmissione e la trasformazione di energia elettrica. Rientrano in tale branca anche gli studi per
l‘ azionamento elettrico di dispositivi per il consumo di energia elettrica
e la tecnica delle alte tensioni.
Nel maggior numero di casi l‘energia elettrica viene prodotta trasformando
energia meccanica con l‘ausilio di generatori rotanti.
Esempi di tecnica di azionamento per macchine elettriche che trasformano energia elettrica in energia meccanica sono le macchine sincrone,
asincrone e le macchine di tensione continua. Nell’ambito delle piccolepropulsioni, inoltre, esistono ulteriori esempi.
Nella tecnica di azionamento elettrico si lavora allo sviluppo di motori
lineari che trasformano energia elettrica direttamente in un movimento
meccanico lineare, senza alcun movimento di tipo rotatorio.
8
Azionamenti elettrici e controlli automatici
1.1.3
Minos
Tecnica dell’automatizzazione
Nella tecnica dell’automatizzazione vengono automatizzati o sorvegliati
diversi step di lavoro manuali con l‘ausilio di metodi della tecnica di misura, della tecnica del comando e della tecnica della regolazione. Per il
comando e la regolazione stessa si usa molto la tecnica digitale.
Per quanto attiene la tecnica della regolazione, essa riguarda molti sistemi
tecnici. Ne sono semplici esempi la regolazione di temperatura nel ferro
da stiro o nelle lavatrici.
Applicazioni più complesse sono necessarie per l’uso di robot industriali,
per la stabilizzazione del numero di giri di un motore, per il comando dei
motori nelle macchine, per il controllo di stabilità del telaio delle stesse
e nell’industria chimica per la regolazione dei processi.
Tra i vari ambiti uno dei più importanti è certamente quello delle tecniche
di avanzamento in cui gioca un fattore fondamentale l‘elettronica per
quanto attiene il controllo e la regolazione delle propulsioni nonchè la fase
di alimentazione tramite elettronica a correnti forti con energia elettrica.
L‘elettronica studia inoltre le possibilità di riduzione delle punte di carico
e l‘ottimizzazione dell‘energia.
9
Minos
1.1.4
Azionamenti elettrici e controlli automaticii
Elettronica
Lo sviluppo, la produzione e l’uso di elementi di costruzione elettronici
come p.e. condensatori e puleggie o elementi costruttivi a semiconduttore come diodi o transistori fanno parte dell’ambito dell’elettronica e
dell’elettrotecnica.
La microelettronica è la parte dell‘elettrotecnica che si dedica allo sviluppo e la produzione di circuiti logici integrati di elementi costruttivi a
semiconduttore. Ne fanno parte gli elementi per collegare semplicemente segnali, processori principali di computer o processori delle schede
L‘elettronica a correnti forti, con lo sviluppo di semiconduttori, gioca un
ruolo sempre più importante nella tecnica di azionamento. Con convertitori
di frequenza l‘energia elettrica viene messa a disposizione in maniera
>£
$
Anche la tecnica digitale fa parte dell’elettronica. Questo ambito include
i circuiti logici classici che oggi vengono costruiti con i transistori. La
tecnica digitale è anche la base per tanti controllori ed è pertanto legata
alla tecnica dell’automatizzazione.
1.1.5
Tecnica delle telecommunicazioni
La tecnica delle correnti deboli è attualmente denominata tecnica delle
telecomunicazioni o tecnica dell’informazione.
Il compito della tecnica delle telecomunicazioni è di trasmettere informazioni tramite impulsi elettrici e onde elettromagnetiche da un trasmittente
a uno più destinatari. Trasmittente e destinatario vengono chiamati anche
la fonte di informazione e il ricevente dell’informazione.
Le informazioni dovrebbero essere trasmesse possibilmente senza o con
poche perdite. Questo migliora il riconoscimento delle informazioni da
parte del destinatario. Si chiama tecnica delle alte frequenze quell’ambito
dell’elettrotecnica che si dedica alla trasmissione di informazioni ad alte
frequenze.
Un aspetto importante della tecnica delle telecomunicazioni è anche
$
10
Azionamenti elettrici e controlli automatici
1.1.6
Minos
Storia dell‘lettrotecnica
¬ campo si fecero le prime scoperte intorno alla corrente elettrica. Con i
lavori di Alva Edison e Werner von Siemens l‘elettrotecnica diventò una
disciplina vera e propria.
Nel 1752 Benjamin Franklin inventò il parafulmine. Pubblicò i risultati dei
suoi esperimenti negli anni 1751-53.
Nel 1792 Luigi Galvani fece il famoso esperimento con coscie di rana.
Alessandro Volta fu ispirato dal suo lavoro e costruì intorno al 1800 la
cosiddetta colonna voltaica. Questa rappresentava la prima batteria
funzionante.
Nel 1820 Hans Christian Ørsted fece esperimenti per spostare una ago
magnetico tramite la corrente elettrica.
Sempre nel 1820 Andrè Marie Ampère con i suoi esperimenti dava la
prova del fatto che due conduttori elettrici esercitano una forza reciproca
l’uno sull’altro. I nomi della tensione elettrica e della corrente elettrica si
devono a lui.
Un grande contributo nell‘ambito dei campi elettrici e magnetici è stato
}%
forza elettrica.
Sulla base dei lavori di Faraday sulla teoria del magnetismo elettrico,
James Clerk Maxwell ha sviluppa l‘elettrodinamica e la sua espressione
matematica.
Nel 1864 Maxwell pubblicò le equazioni che hanno preso il suo nome e
che sono una delle teorie di base nell’elettrotecnica.
Nel 1860 Phillip Reis all’Istituto Garnier a Friedrichsdorf scoprì il telefono
che rese possibile la trasmissione elettrica della lingua. La sua scoperta
però non suscitò un grande interesse. Il primo telefono economico fu
costruuito nel 1876 da Alexander Graham Bell negli Stati Uniti – e soltanto
il suo telefono fu venduto con successo.
11
Minos
Azionamenti elettrici e controlli automaticii
Werner von Siemens fa parte dei pionieri della cosiddetta tecnica delle
correnti forti. Nel 1866 scoprì il principio dinamoelettrico e in seguito sviluppò il primo generatore elettrico, attraverso il quale, l‘energia elettrica
per la prima volta era a disposizione in una grande quantità.
;ª
<
ne. Con questa scoperta faceva entrare la luce elettrica nelle abitazioni.
In tal modo la corrente elettrica iniziava ad occupare sempre più spazzi
della vita domestica quotidiana.
Contrariamente ad Edison che si dedicava prevalentemente alla tensione
costante, Nicola Tesla e Michail von Dolivo-Dobrowolsky studiavano nel
campo della tensione alternata creando le basi per i sistemi di approvvigionamento energetico di oggi.
La prima scuola di elettrotecnica del mondo fu creata presso l’Istituto
Tecnico Superiore di Darmstadt in Germania. Il corso di studi durava
quattro anni e terminava con un esamecon il quale si conseguiva il titolo
di ingegnere per l‘elettrotecnica.
Altre cattedre indipendenti per l‘elettrotecnica venivano create nel 1885
e nel 1886 in Inghilterra allo University College London e negli Stati Uniti
all’Università di Missouri. Gli ingegneri che avevano studiato là furono
Nel 1884 Heinrich Rudolf Hertz riusciva di provare la giustezza delle
equazioni di Maxwell tramite un esperimentoche affermava l’esistenza
di onde elettromagnetiche e poneva così le basi per la trasmissione di
$
¬
mite radiotrasmissione, superando una distanza di 3 km. Sui suoi lavori si
basano i primi impianti trasmittenti e riceventi, che dal 1900 in poi sono
stati disponibili anche in commercio.
La prima valvola radio, un diodo, è stato scoperto nel 1905 da John
A. Fleming. Nell’anno seguente Robert von Lieben e Lee De Forest
sviluppavano indipendentemente l’uno dall’altro il triodo. Questo tubo
Le basi della TV nel 1926 sono stati costruiti da John Logie Baird che
con mezzi semplici ha realizzato la prima TV meccanica sulla base del
disco di Nipkow. Nel 1928 già era possibile la trasmissione a colori. Nello stesso anno si svolse anche la prima trasmissione transatlantica da
Londra e New York.
Manfred von Ardenne nel 1931 sviluppò il tubo a raggi catodici. Con la
televisione elettronica la TV sulla base del disco meccanico di Nipkow
velocemente passò di moda.
12
Azionamenti elettrici e controlli automatici
Minos
Nel 1942 Konrad Zuse costruì il primo computer funzionante. Questo computer portava il nome Z3. John Presper Eckert e John Mauchly nel 1946
presentavano la ENIAC (Electric Numerical Integrator and Computer).
Iniziò così l’epoca del computer che con la sua potenza di calcolo rendeva
possibile lo sviluppo di tecnologie assolutamente moderne. Così ad es.
l’atterraggio sulla luna è stato possibile soltanto grazie a queste scoperte.
Il transistor è stato scoperto nel 1947 nei Bell Laboratories negli Stati Uniti
da Wiliam B. Shockley, John Barden e Walter Brattain. Con l’aiuto dell’
industria di semiconduttori tanti strumenti furono costruiti in maniera più
compatta. Un altro passo importante in questa direzione fu lo sviluppo di
circuiti di commutazione integrati e degli attuali microprocessori.
Il primo robot industriale del mondo è stato costruito nel 1958 da G.C.
Devol e J. Engelberger negli Stati Uniti. General Motors nel 1960 per la
prima volta usava tali motori nella produzione industriale. Oggi i robot
industriali sono una parte importante della tecnica dell’automatizzazione.
In diversi ambiti industriali, come ad es. nell’industria automobilistica sono
addirittura indispensabili.
Nel 1968 Marcian Edward Hoff nella ditta Intel sviluppava il microprocessore. La prima realizzazione di un microprocessore avvenne nel 1969 ed
era l’Intel 4004, un processore di 4 Bit. Il primo processore di 8 Bit, l’Intel
8080, nell’anno 1973, rese successivamente possibile la costruzione del
primo computer personale.
Un importante supporto digitale per la memorizzazione è il Compact
Disk, conosciuto come CD. È stato sviluppato nel 1978 da parte della
ditta Phillips. Nel 1982 da una cooperazione tra Philips e Sony nasceva
l’Audio-CD. Dal 1985 in poi era possibile memorizzare informazioni digitali
anche sul CD-ROM.
Dalla ditta Honda nell’anno 1996 è stato presentato il primo robot umanoide nel mondo, il P2. Nel 1997 gli seguiva il P3. Lo sviluppo successivo è
stato Asimo .Asimo ha un peso di soltanto 43 kg per di 1,20 m di altezza,
mentre il P2 pesava ben 210 kg.
Questi robot umanoidi rappresentano anche l’interazione di componenti
elettrotecniche e elettroniche con diverse componenti meccaniche. Il
collegamento di questi diversi campi dello scibile viene chiamato meccatronica.
13
Minos
Azionamenti elettrici e controlli automaticii
1.2
Tensione, corrente e resistenza
1.2.1
Carica elettrica e tensione
La causa dell‘ elettricità è da cercare nella struttura degli atomi. Secondo
il modello di Bohr, intorno a un nucleo atomico girano elettroni con carica
negativa.
Ogni elemento chimico ha un proprio numero di protoni con carica positiva nel nucleo dell‘atomo. I neutroni esistenti nello stesso nucleo sono
senza carica elettrica. Nello stato normale il numero degli elettroni che
girano intorno al nucleo è uguale al numero di protoni.
Nell’immagine sono rappresentati 14 elettroni – un numero che corrisponde all’elemento silicio. Le cariche si neutralizzano; l’atomo dunque
è neutrale.
Se si separano gli elettroni dall‘atomo nascono due potenziali diversi.
Il nucleo restante ha una carica positiva, lo si chiama ione. Gli elettroni
hanno una carica negativa.
Immagine 1:
14
Modello dell‘atomo.
Azionamenti elettrici e controlli automatici
Minos
Per separare gli elettroni dal resto dell‘atomo c’è bisogno di lavoro.
Questo lavoro si ritrova nella tensione elettrica che si forma tra
potenziali diversi.
La tensione viene indicata con il simbolo U e la sua unità di misura è il
volt [v].
Tensione elettrica = lavoro che è stato necessario / cariche separate
U = W/Q
La tensione elettrica spesso viene chiamata anche soltanto tensione,
da non confondere con la tensione del materiale.
La quantità di cariche (Ladungsmenge) Q si misura in coulomb [c]. La
quantità di cariche più piccola possibile è la carica elementare e,
cioè la carica di un singolo elettrone. Questa carica elementare è
pari a:
e = 1,602 · 10 ….. ….
La separazione delle cariche è possibile con diversi metodi:
- Sfregamento meccanico
Durante lo sfregamento di diversi materiali con un altro corpo si separano degli elettroni che si trasmettono al corpo. Questo accade ad
es. durante lo sfregamento di un palloncino con una maglia di lana.
Se viene toccato un oggetto di metallo, le differenze di carica vengono
neutralizzati e si sente una scossa elettrica non piacevole.
- Induzione
Durante l’induzione in un campo magnetico viene mossa una bobi
L’induzione viene usata nei generatori delle centrali elettriche, ma
anche nell’alternatore di una macchina o nel dinamo di una bicicletta.
- Reazione chimica
La separazione delle cariche a causa di processi elettrochimici si trova
soprattutto in batterie e accumulatori. Gli accumulatori possono essere
ricaricati e perciò sono adatti per immagazzinare energia elettrica.
- Effetto della luce
£
&
"
\
Questo processo viene usato soprattutto nelle celle solari.
15
Azionamenti elettrici e controlli automaticii
Minos
- Effetto di pressione
] £
tensione. Queste tensioni sono molto alte e si possono scaricare con
scintille. L’effetto descritto si usa in accendisigari a gas o accenditori.
Anche se le tensioni sono molto alte, se le correnti elettriche sono basse,
non sussiste nessun pericolo.
­£
£
duttivi può crearsi una tensione. Ma queste tensioni sono molto piccole.
In coppie termoelettriche che nascono dal collegamento di rame e (Konstatan) questo effetto viene usato per misurare la temperatura del punto
di collegamento dei due materiali.
La separazione delle tensioni è possibile anche in un campo elettrico.
Esempio
Tensioni importanti di batterie e accumulatori sono:
1, 2 v
1, 2 v
le batterie)
1, 5 v
2,0 v
macchina)
3,7 v
accumulatore al nichel-cadmio (costruito come le batterie)
accumulatore al nichel-…. (Metallhydrid) (costruito come
batteria al zinco-carbone (batterie a prezzo basso)
accumulatore al piombo (batteria di avviamento nella
accumulatore al litio e ioni (laptop, cellulare)
In Europa le tensioni in base alla loro intensità si dividono in tre livelli:
{_[
;^[
{ ;[[[ ;_[[ continua
alta tensione: più di 1000 v tensione alternata o 1500 v tensione continua
Esempio
Altre tensioni importanti sono
24 v
tensione di controllo (ad es. controllore programmabile)
230 v
tensione di rete nelle case
500 v
i tram (tensione continua)
750 v
tram a Berlino (tensione continua)
150000v
treno (tensione alternata)
380000v
conduttori di alta tensione (tensione alternata)
La differenza tra tensione alternata e tensione continua verrà approfondita in seguito.
16
Azionamenti elettrici e controlli automatici
1.2.2
Minos
Intensità di corrente
Le cariche separate tendono a neutralizzarsi e a formare nuovi atomi
neutri dal punto di vista elettrico. La neutralizzazione è possibile quando
potenziali diversi vengono legati ad un conduttore elettrico.
Durante la neutralizzazione delle cariche, nel conduttore scorre la corrente
elettrica. L’intensità di corrente corrisponde alla quantità delle cariche
che scorrono in un certo tempo. L’intensità di corrente è indicata con il
simbolo I e viene misurata con l’unità di misura Ampère [a].
intensità di corrente = quantità delle cariche / tempo
I = Q/t
L’intensità di corrente è un‘unità fondamentale del sistema di misura
internazionale.
La quantità di cariche può essere indicata in coulomb [C] o in ampersecondo [as]. Inoltre risulta:
1 as = 1 C
Visto che una quantità di cariche di 1 as è una quantità piccola, nella
prassi spesso si utilizza l‘amperora [ah] e risulta:
1 ah = 3600 as = 3600 C
Esempio
Dall’accumulatore di una macchina per 15 ore viene prelevata una corrente di 4 a. Quanto è grande la quantità di carica prelevata?
Q=l·t
Q = 15 ore · 4 a
Q = 60 ah
Dall’accumulatore è stato prelevata una quantità di carica (Ladungsmenge) di 60 ah.
Intorno ad ogni conduttore attraversato di corrente elettrica si sviluppa /
crea un campo magnetico. Questa reazione magnetica viene sfruttata in
motori elettrici ma anche in bobine per azionare relè o valvole comandati
tramite la corrente. L’esistenza indesiderata di campi elettromagnetici
invece spesso viene chiamata smog elettrico.
17
Minos
Azionamenti elettrici e controlli automaticii
La corrente si muove dal polo positivo al polo negativo del alimenta#
&
in cui non si aveva una conoscenza esatta dei svolgimenti precisi. Dal
polo positivo. A causa del grande sforzo necessario a diffondere questo
£
]£
&
tanto con apparecchi di misura, tuttavia, la corrente è ‘visibile’ a causa
dei suoi diversi effetti:
- Calore
]£
]
so questo effetto non è desiderato, visto che il riscaldamento determina
una perdita di energia elettrica. Nel riscaldamento elettrici o nei bollitori
invece questo è un effetto desiderato.
- Effetto magnetico
Intorno ad ogni conduttore attraversato da corrente elettrica si sviluppa
un campo magnetico. Questa azione magnetica viene sfruttata nei motori elettrici ma anche in bobine per azionare relè o valvole comandate
tramite la corrente. L’esistenza indesiderata di campi elettromagnetici
invece spesso viene chiamata smog elettromagnetico.
- Effetto chimico
Negli accumulatori, durante la carica, l‘energia elettrica viene trasformata in energia chimica. Durante la scarica questo processo avviene
all‘inverso. Anche la dissociazione dell‘acqua in idrogeno e ossigeno può
avvenire fornendo energia elettrica. Questo processo viene chiamato
elettrolisi.
- Luce
Nelle lampade a incandescenza, a causa della corrente elettrica, un
conduttore elettrico viene riscaldato in maniera tale da emettere luce
nello stato di incandescenza. Con un gas di protezione si evita che bruci
il conduttore. In altri mezzi di illuminazione come ad es. le lampade luminescenti a gas, gli elettroni degli atomi e le molecole di un gas vengono
stimolati ad emettere la luce da un campo magnetico.
­ <$$
&$$
rapia vengono utilizzate basse correnti a scopo di riabilitazione. In ogni
caso sono da evitare passaggi di corrente troppo alti. Le correnti elettriche
[_[$$
18
Azionamenti elettrici e controlli automatici
1.2.3
Minos
Resistenza elettrica
Se la corrente attraversa un conduttore elettrico alla corrente viene
contrapposta una resistenza. Soltanto in superconduttori vicini allo zero
assoluto la resistenza è nulla.
La resistenza elettrica dipende dal materiale e viene descritta con il sim
åæ
lunghezza [l] e dalla sezione trasversale [A] del corpo attraversato dalla
corrente e viene calcolata con la seguente formula:
resistenza = p · l / A
X
åçæ¦
viene descritto il collegamento fra tensione elettrica, l’intensità di corrente
e la resistenza elettrica.
Resistenza = tensione / intensità di corrente
R = U/l
Dall’altro lato, a causa della resistenza elettrica viene determinato con
quale intensità le cariche attraversano il conduttore.
Intensità di corrente = tensione / resistenza
I = U/R
La corrente dunque è più grande se la tensione è maggiore o se la resistenza è più piccola.
Un circuito elettrico consiste di diversi componenti. I conduttori hanno
una resistenza piccola mentre i non conduttori presentano una resisten]$
£
corrente sarebbe quasi illimitato. Questo stato viene chiamato cortocircuito. Le correnti alte possono distruggere il conduttore se questo non è
protetto con un fusibile.
19
Azionamenti elettrici e controlli automaticii
Minos
Esempio
<
;[[[ç#
alta la corrente che attraversa il corpo umano con una tensione di 50 v?
I=U/R
I = 50 v / 1000 OHM
I = 50 ma
Se il corpo umano viene attraversato da 50 v questa è già una corrente
di 50 ma. Anche se la pelle ha una resistenza di contatto maggiore, le
tensioni oltre 50 v sono considerate pericolose per la vita.
"
#
La resistenza di un materiale dipende dalla sua resistenza elettrica spe
ç
²
X
>åçêæ
${
¢
conduttore
p=R·A/l
X
]
tratta di un conduttore metallico la resistenza cresce con l’aumento della
&
del conduttore ad una temperatura di 20 ° C.
'$
&
'^[
Ïåçêæ
Esempio
aluminio
rame
argento
silizio
porcellana
20
0,0278
0,0175
0,0159
[
640 · 106
1020
Azionamenti elettrici e controlli automatici
1.3
Minos
Prestazione elettrica e lavoro
La potenza elettrica si calcola come prodotto della tensione elettrica e
dell’intensità di corrente. Viene descritta con il simbolo P e si misura in
watt [W].
potenza elettrica = tensione elettrica · intensità di corrente
P=U·I
Esempio
Una lampada a incandescenza a 230 v ha una prestazione di 60 w.
Quanto è grande la corrente che attraversa questa lampada?
I = P/U
I = 60 w / 230 v
I = 0,26 a
£
[^
La prestazione elettrica è indipendente dal tempo. Il lavoro elettrico viene calcolato moltiplicando la potenza per il tempo. Viene indicato con il
simbolo W e la sua unità di misura è il wattsecondo [ws].
Lavoro elettrico = prestazione · tempo
W = p·t
W=U·I·t
Invece dell’unità di misura [ws] può essere usato anche il joule [j]. Il lavoro
indicato da un joule però è abbastanza piccolo, perciò spesso viene usata
l’unità di misura kilowattora [kwh].
1 kwh = 3 600 000 j
Come nella meccanica il lavoro ha la stessa unità di misura dell‘energia.
Esempio
Un riscaldatore ha una potenza assorbita di 2200 w e viene azionato con
230 v. Qual è il fabbisogno di energia ha in 24 ore?
W=P·t
W = 2200 W · 24 h
W = 52 kwh
In 24 ore il riscaldatore ha bisogno di 52 kwh di energia.
21
Minos
1.4
Azionamenti elettrici e controlli automaticii
Circuito elettrico
Se si collegano i due poli di un alimentatore si crea una corrente e le
tensioni si neutralizzano. Se questi due poli dell’alimentatore non sono
soltanto collegati, le correnti e le tensioni si dividono in maniera diversa.
Da Gustav Robert Kirchhoff sono stati trovate due regole che presndono
il suo nome, che descrivono il legame fra più correnti elettriche e più
tensioni elettriche nelle reti elettriche.
La prima legge di Kirchhoff viene chiamata anche legge dei nodi. Dice
che la somma delle correnti in un punto nodale equivale alla somma delle
correnti che escono dal nodo stesso.
Se alle correnti che arrivano al nodo si dà un segno opposto a quello
delle correnti che escono dal nodo, si può anche dire che la somma di
tutte le correnti in un nodo è zero:
I1 + I2 = I3 + I4 + I5
o
I1 + I2 – I3 – I4 – I5 = 0
&
del circuito elettrico.
Immagine 2:
22
Nodi
Azionamenti elettrici e controlli automatici
Minos
La seconda legge di Kirchhoff viene chiamata anche principio delle maglie.
]
di tutte le tensioni è pari alla somma dei cali di tensione.
Detto in maniera diversa: la somma di tutte le tensioni nel circuito senza
delle resistenze si parla di calo di tensione generato dal consumo di
energia delle stesse.
U1 + U2 = R1 · I + R2 · I + R3 · I
o
U1 + U2 – R1 · I – R2 · I – R3 · I = 0
I cali di tensione si spiegano anche con la legge ohmica:
U=R·I
Esempio
In un accumulatore al piombo di una macchina sono collegate sei cellule
singole, ognuna a 2 V. Quando è alta la tensione totale?
Utotale = 6 · 2 V
Utotale = 12 V
La tensione totale dell‘accumulatore a piombo è di 12 v.
Immagine 3:
Circuito elettrico
23
Minos
1.4.1
Azionamenti elettrici e controlli automaticii
Collegamento in parallelo e circuito in serie
A circuiti con collegamento in parallelo e in serie vengono collegate diverse utenze come lampade a incandescenza, bobine, relè o valvole. Le
tensioni e le correnti si dividono secondo le leggi di Kirchhoff.
In un circuito in serie ad es. le lampade sono sistemate una dietro l’altra.
Ogni elemento viene attraversato dalla stessa corrente. Se tutte le lampade hanno la stessa resistenza, in corrispondenza di tutte le lampade
si ha la stessa caduta di tensione.
Se ci sono resistenze diverse,la caduta di tensione è minore in corrispondenza della resistenza più piccola. La somma dei cali di tensione è
pari alla tensione dell’alimentatore.
In un circuito in serie, le utenze devono essere sceltein base al calo di
che lampade a 24 v ilumminerebbero poco se fossero legate in serie ad
un alimentatore di 24 v.
Immagine 4:
24
Circuito in serie
Azionamenti elettrici e controlli automatici
Minos
Negli schemi elettrici perciò dovrebbe essere inserita soltanto un‘utenza
a cui collegare più contatti o interruttori.
Ma ci possono essere anche utenze non note in un percorso della corrente. I contatti consumati di un interruttore ad es. a causa di una resistenza più alta possono essere responsabili di un calo di tensioneche riduce la
X#
&$
In un collegamento in parallelo di due lampade a incandescenza con la
stessa resistenza la corrente si divide in due correnti parziali della stessa entità. Per ognuna delle due lampade tensione è la stessa messa a
disposizione dall’alimentatore.
Se utenze con diverse resistenze vengono allacciati in parallelo, le correnti o tensioni si dividono in maniera diversa. Per il utilizzatore con la
resistenza più alta ci sarà una corrente più bassa rispetto alle utenze con
resistenze minori. Il calcolo delle singoli correnti segue la legge di Ohm
e le regole di Kirchhoff.
Immagine 5:
Collegamento in parallelo
25
Azionamenti elettrici e controlli automaticii
Minos
In un circuito in serie le resistenze dei singoli elementi vengono addizionate.
Rtotale = R1 + R2
In un collegamento in parallelo, invece, le correnti delle singole deviazioni
vengono addizionate.
Itotale = I1 + I2
Per il calcolo della resistenza totale n un collegamento in parallelo vale
quindi la seguente regola:
1/Rges = 1/R1 + 1/R2
Esempio
Una lampada a incandescenza di 6 v deve essere collegata ad un camion.
Il camion ha soltanto un‘alimentazione di 24 v. Per evitare che la lampada
si bruci, viene collegato un resistore addizionale in serie alla lampada. La
lampada deve essere attraversata da una corrente di 3 a. Quanto deve
essere alta la resistenza del resistore addizionale?
La resistenza della lampada con 6 v è :
R1 = U / I
R1 = 6 V / 3 A
R1 = 2 Ω
Avendo a disposizione una corrente di 24 v e un‘intensità di corrente di
3 a, la resistenza totale deve avere il seguente valore:
Rges = U / I
Rges = 24 V / 3 A
Rges = 8 Ω
La resistenza totale della resistenza addizionale si calcola come somma
della resistenza totale e della resistenza della lampada:
Rges = R1 + R2
R2 = Rges – R1
R2 = 8 Ω – 2 Ω
R2 = 6 Ω
ç
26
Azionamenti elettrici e controlli automatici
1.4.2
Minos
Inserire strumenti di misura
Per misurare una tensione lo strumento di misura viene collegato in
maniera parallela all’alimentatore. Se c’è soltanto un‘utenza nel circuito
elettrico, in questo modo viene misurato anche il calo di tensione presso
il utilizzatore. Se ci sono più utilizzatori nel circuito, il calo di tensione viene accertato per il singolo utilizzatore collegando lo strumento di misura
soltanto in parallelo all‘utenza da analizzare.
A causa dell’allacciamento in parallelo, una parte della corrente corre
%££
£
misura con un‘elevata resistenza interna.
Per poter misurare invece,tensioni di diverse entità, lo strumento deve
avere una resistenza relativamente bassa. Se si utilizzano delle resistenze
misurazione.
La registrazione/regolazione dell’intervallo da misurare spesso avviene
tramite un interruttore rotante o preselettore. In generale le misurazioni
doverebbero essere fatte nella terzo settore di misurazione. Se i valori da
misurare sono sconosciuti, prima di iniziare dovrebbe essere impostato
corrispondente valore corrispondente.
Gli strumenti per misurare la tensione vengono chiamati anche voltmetri.
Immagine 6:
collegarmento di strumenti di misura (in parallelo all’utilizzatore)
27
Minos
Azionamenti elettrici e controlli automaticii
Per poter misurare la corrente che attraversa lo strumento di misura,
quest‘ultimo viene inserito nel conduttore.
Lo strumento per misurare la corrente che attraversa il circuito, viene chiamato amperometro. L’ampermetro può avere la formma di una tenaglia
soprattutto per la misurazione di correnti alternate elevate. La corrente
viene misurata se si stringe la tenaglia intorno al conduttore.
Gli strumenti per misurare tensioni e correnti vengono chiamati multimetri.
I diversi intervalli di misurazione sono ottenuti in un multimetro allacciando
ulteriori resistenze.
Per misurazioni di tensioni diverse, le resistenze vengono collegate in
serie con lo strumento di misurazione. Per misurare la tensione si aggiungono in parallelo delle resistenze addizionali.
Nella misurazione con multimetro occorre stare attenti che il multimetro
non sia impostato su un ambito di misurazione per la corrente.
A causa della resistenza molto bassa, durante la misurazione una corrente alta passa attraverso lo strumento e può portare alla distruzione di
quest‘ultimo o a fondere il fusibile.
Immagine 7:
28
Multimetro
Azionamenti elettrici e controlli automatici
Minos
Le resistenze vengono misurate al di fuori del circuito. Gli strumenti per
misurarle vengono chiamati ohmmetri.
I multimetri oggi sono quasi sempre attrezzati con display digitale. Qualche volta sono anche in grado di misurare altre grandezze elettriche.
1.5
Tensione continua
Se si tratta di tensione continua l’ampiezza è costante. Anche la polarità dell’alimentatore non cambia. La tensione continua è la base per la
corrente continua.
La tensione continua viene creata in cellule galvaniche, cioè in batterie
e accumulatori. Anche le cellule solari forniscono una tensione continua.
Nei generatori invece viene creata una tensione alternata. Soltanto con
l’aiuto di un commutatore collegato al generator di tensioni continua è
possibile creare una tensione continua pulsante.
Lo stenogramma per la tensione continua è il segno della tensione continua. 24 v = ad es. è la dominazione per una tensione di 24 v.
Nei paesi di lingua inglese la corrente continua viene chiamata direct
current e abbreviato con DC.
Immagine 8:
Tensione continua
29
Minos
1.6
Azionamenti elettrici e controlli automaticii
Tensione alternata
La tensione continua è normale soprattutto per valori bassi di tensione.
Spesso vengono usati comandi con 24 v di tensione continua. Nelle
macchine spesso vengono usate anche tensioni continue di 12v.
Lo svantaggio della tensione continua è non consente la trasmissione
di grande potenze. Per poter trasportare grandi quantità di energia, la
tensione deve essere molto alta, evitando così che le correnti non siano
troppo grandi. La tensione continua, però, non consente di raggiungere
semplicemente valori alti di tensione.
Se c’è il bisogno di tensioni alte spesso si usa la tensione alternata. La
grandezza e la polarità della tensione – se è tensione alternata – cambiano
periodicamente. Il vantaggio della tensione alternata è che la tensione
con l’aiuto di transistori può trasformata in maniera semplice in valori più
alti o bassi.
Ad es. vengono create tensioni molto alte per elettrodotti. Se si trasmette
una certa potenza, le correnti che corrono sono più basse paragonati con
una tensione minore. Le perdite inevitabili a causa della resistenza del
conduttore, in tal modo, sono più basse.
Immagine 9:
30
Tensione alternata
Azionamenti elettrici e controlli automatici
Minos
La tensione alternata spesso ha un andamento sinusoidale. Sono possibili
anche tensioni alternate con forma di triangolo, dente di sega o rettangolo.
Della tensione alternata non si indicano i valori effettivi. Il valore effettivo
della tensione alternata sinusoidale si calcola come segue:
$$Ã^
Ueff = UsÃ^
La corrente alternata nelle case ha una tensione effettiva di 230 v. Quanto
è alta la tensione massima?
Esempio
Ueff = UsÃ^
Us = Ueff¢Ã^
Us^[²¢Ã^
Us = 325 V
La tensione di punta/massima della tensione alternata nelle case è 325 v.
Il segno per la tensione alternata è circa 230 v ~ ad es. è la denominazione breve per la tensione alternata che viene usata nelle case. Ha un
valore effettivo di 230 v.
La polarità della tensione alta cambia regolarmente. La velocità del
cambiamento viene chiamato frequenza. Viene indicata con il simbolo
f e misurata in hertz [hz]. Una frequenza di un hertz è un’oscillazione
completa in un secondo.
In Europa la frequenza della corrente alternata è 50 hz, nel nord
dell’America invece 60 hz. La rete dei treni in Germania viene azionata
con una frequenza di 16 2/3 hz.
Nei paesi di lingua inglese la corrente alternata viene chiamata alternating
current ed è usata l’abbreviazione AC.
31
Minos
1.6.1
Azionamenti elettrici e controlli automaticii
Carichi induttivi e capacitivi (kapazitive Lasten)
In linea di massima per la tensione alternata vale la legge di Ohm. In
particolare occorre prendere in considerazione il comportamento delle
bobine e dei condensatori.
Mentre nella tensione continua si presentano soltanto resistenze ohmiche, nella tensione alternata le bobine hanno una resistenza induttiva e
i condensatori una resistenza capacitiva.
In una bobina a causa dell’induzione propria viene creata una tensione.
#
£
induttiva. Per questo motivo la corrente aumenta l‘angolo di spostamento
di fase (SYMBOL IM TEXT). Se si tratta di una bobina senza perdite la
tensione anticipa la corrente di 90°.
L’induttività L di una puleggia viene indicata in henry [vs/a].
In un condensatore con una tensione continua la corrente entra soltanto
]
sulle piastre del condensatore.
In caso di tensione alternata, a causa dell’inversione della tensione, il
condensatore di continuo viene caricato e scaricato. Dunque la corrente
passa soltanto prima che la tensione sia completamente caricata. In un
condensatore senza perdite la corrente anticipa la corrente di 90°.
La capacità del condensatore viene indicata in farad [f].
Il calcolo della produttività e del lavoro con una tensione alternata può
essere eseguito come il calcolo con tensione continua. Questo però vale
soltanto se ci sono soltanto resistenze in Ohmutilizzando i valori effettivi.
Se in un circuito ci sono bobine, cioè motori o magneti elettrici o anche
condensatori il calcolo deve essere corretto. Siccome a causa delle
induzioni e delle capacità c’e uno spostamento delle fasi tra tensione e
corrente, le punte/massime della curva di corrente e di tensione non si
>
Se vengono moltiplicati i valori effettivi di tensione e corrente si ottiene
un rendimento apparente, :
resa d’apparenza = tensione · corrente
S=U· I
La resa d’apparenza viene indicata con l’unità di misura [va].
32
Azionamenti elettrici e controlli automatici
Minos
La potenza apparente così calcolata è maggiore della potenza vera e propria.
La differenza fra tali entità viene descritta con il fattore di potenza . Per tutti
i motori o macchine questo valore è indicato sulla targhetta delle istruzioni.
La potenza vera e propria viene chiamata potenza attiva e viene calcolata con
la seguente formula:
Potenza attiva = tensione · corrente · cos P = U · I · cos La potenza attiva viene misurata in watt [W].
La differenza fra potenza apparente e potenza attiva viene chiamata
potenza reattiva (Q)misurata in [var].
potenza reattiva
po
ten
za
ap
pa
ren
te
Con il fattore di potenza, inoltre, diveta evidente che la potenza reattiva
e la potenza attiva non possono semplicemente essere sommate per
calcolare la potenza apparente. Più in particolare tali grandezze possono essere sommate solo geometricamente (potenza attiva e potenza
reattiva formano un angolo retto). La potenza reattiva in questo caso è
l‘ipotenusa del triangolo.
potenza effettiva
Immagine 10:
Potenza attiva e potenza apparente
33
Azionamenti elettrici e controlli automaticii
Minos
Esempio
Un motore elettrico ha un fattore di potenza = 0,85 A. Una rete a corrente
alternata con 230 V effettivamente prende/consuma 3,5 A di corrente.
Quanto sono alti la potenza attiva e la potenza reattiva?
P = U · I · cos P = 230 V · 3,5 A · 0,85
P = 684,25 W
La potenza reattiva è 684, 25 V.
Il coseno di 0,85 e dà come risultato un angolo di 31, 79°. Il seno
dell’angolo è 0,527. Dunque la potenza reattiva si calcola come segue:
Q = U · I · sin Q = 230 V · 3,5 A · 0,527
Q = 224,2 Var
La potenza reattiva è 224, 2 Var. Il calcolo si poteva fare anche con la legge
di Pitagora.
La stessa denominazione delle potenze è attribuità anche alle resistenze delle
tensioni alternate. La resistenza totale viene chiamata resistenza apparente. Si
compone della resistenza ohmica del conduttore e della resistenza reattiva.
Resistenza ohmica e resistenza reattiva formano un angolo retto e possono
essere sommate solo geometricamente. Con lìangolo viene indicato il
rapporto fra la resistenza ohmica e la resistenza reattiva. Se l’angolo è molto grande la resistenza ohmica può essere non considerata.
Normalmente le resistenze reattivesono sempre accompagnate da
quelle ohmiche, dato che non esistono circuiti senza perdite. Le
resistenze reattive perciò sono sempre legate a resistenze ohmiche
che trasformano la potenza.
Esempi per resistenze che hanno una parte ohmica e una parte induttiva sono:
- motori
- trasformatori
­ £
venzionale senza compensazione
34
Azionamenti elettrici e controlli automatici
Minos
Esempi di resistenze che hanno una parte ohmica e una parte capacitiva sono:
-
alimentatori (usati ad es. in computer)
convertitori di frequenza
In generatori che producono corrente la tensione alternata spesso viene
creata tramite tre bobine che sono sfalsate di 120° . In questa maniera
nascono tre singole tensioni alternate spostate sempre di un terzo rispetto le altre tensioni alternate.
La corrente trifase in tedesco nella lingua parlata viene chiamata anche
corrente di giri. Utenze di piccole quantità possono sfruttare le singole
fasi della corrente trifase anche in maniera separata. Motori più grandi
però vengono messi in moto con tutte le tre fasi della corrente trifase.
Visto che le bobine durante il lavoro, oltre della resistenza ohmica hanno
una resistenza induttiva, devono essere azionate con una tensione più
alta. Così ad es. per l‘attivazione di una bobina è necessaria una tensione alternata di 48 V, mentre la stessa bobina magnetica con tensione
continua può essere azionata soltanto con 24 V.
Se invece una bobina magnetica che è stata costruita per 48 V di tensione alternata, viene azionata con 48 V tensione continua, il dispositivo è
attraversato da una corrente maggiore visto che le manca la resistenza
induttiva. In questo caso la bobina si surriscalda di più e può funzionare
soltanto brevemente.
Si deve considerare che la resistenza induttiva dipende dalla frequenza.
Una bobina magnetica perciò nella rete elettrica americana con 60 Hertz
avrà una resistenza un po’ più alta che nella rete europea con 50 Hertz.
35
Minos
1.7
Azionamenti elettrici e controlli automaticii
La rappresentazione di circuiti elettrici
ta schema elettrico.Tale rappresentazione non prende in considerazione
la vera forma e posizione degli elementi, ma mostra in modo astratto le
funzioni e il corso della corrente.
Gli schemi elettrici nascono già all’inizio della programmazione di un impianto o di un insieme di componenti ma sono necessari anche in seguito
per riparazioni e manutenzione. Gli schemi elettrici costituiscono la documentazione secondo la DIN (norma tedesca dell’industria) EN 61082.
1.7.1
Mezzi elettrici di produzione
I singoli elementi di un circuito elettrico vengono chiamati mezzi di produ
$
può essere messo un segno meno (-).
Esistono altre notazioni per indicare gli impianti, qualeil segno di uguagli"\
di inserimento del dispositivo.
Anche i collegamenti degli elementi possono essere descritti. Davanti
alle denominazioni, in questo caso, viene utilizzato il simbolo (:). I due
collegamenti della bobina di un relè ad es. vengono segnati con :A1 e :A2.
Importanti lettere di riferimento di mezzi elettrici di produzione sono:
"
\
B
Traspositore di grandezze non elettriche in grandezze elettriche
e viceversa, … (interruttori cilindrici), sensori, interruttori a pressione)
F
Attrezzi di protezione ( relè o dispositivi di protezione)
H
Dispositivi di segnalazione (attrezzi di segnalazione ottici o
acustici)
K
Relè (anche relè a tempo e relè)
M
Motori
P
Strumenti di misura
S
Interruttori (selettori, pulsanti)
¨
"
\
Y
Attrezzi azionati in maniera meccanica (bobine magnetiche)
I mezzi di produzione vengono disegnati nello stato senza tensione e
non azionati. Un’eccezione sono gli organi di contatto azionati in maniera
meccanica.
36
Azionamenti elettrici e controlli automatici
Minos
Il contrassegno dei mezzi di produzione viene scritto alla sinistra o sotto
il simbolo, mentre il contrassegno dei collegamenti si trova al lato destro
del simbolo di collegamento o anche sopra lo stesso.
Esempi di descrizioni di collegamenti sono:
Collegamenti di relè
: A1 e :A2
Collegamenti di avvisatori :X1 e :X2
'
{;{^$
Collegamenti di motori elettrici :u, :v, :w
A destra del numero d‘ordine della notazione indicativa dei mezzi di produzione si può trovare un‘altra lettera che aggiunge un altra informazione
relativa alla funzione del mezzo di produzione.
Lettere aggiunte sono:
Funzione del tempo
Funzione supplementare
Funzione principale
Funzione di conteggio?
T
A
M
C
relè
lampada spia
relè temporizzato
Immagine 11:
Esempi per mezzi elettrici di produzione
37
Minos
1.7.2
Azionamenti elettrici e controlli automaticii
Schemi elettrici
I diversi mezzi di produzione vengono inseriti in schemi elettriciche
ne chiariscono i collegamenti e le funzionalità. Se i collegamenti sono
rappresentati in maniera dettagliata e tutte le singole parti riconoscibili
si parla di schemi circuitali.
In un schema circuitale in rappresentazione separata, il circuito principale è rappresentato separato dal circuito di comando. Sopra vengono
inserite le linee elettriche che rappresentano i diversi livelli con linee
orizzontali.
La denominazione delle singole linee elettriche è ordinata al lato sinistro.
Sopra le linee si scrive l’altezza della tensione.
I singoli percorsi della corrente vengono inseriti in maniera verticale. Il
£
disposte in basso.
La rappresentazione nello schema circuitale non si cura nè della sistemazione dei singoli mezzi di produzione nello spazio nè della connessione
dei singoli elementi.
Immagine 12:
38
Scema circuitale, rappresentazione separata
Azionamenti elettrici e controlli automatici
Minos
Lo schema circuitale in rappresentazione separata viene usato per
sviluppare e comprendere i singoli collegamenti. Per cablare un collegamento questi schemi sono meno adatti.
Negli schemi circuitali in rappresentazione normale, il circuito principale
e il circuito di comando non vengono disegnati in maniera separata.
$
Con una linea interrotta viene rappresentato il collegamento meccanico.
La collocazione vera nella rappresentazione dei circuiti, non viene
considerata.
in queste rappresentazionila visibilità e la chiarezza non sono sempre
garantite, quindi essi vengono usati soltanto per schemi elettrici semplici,
quale la rappresentazione di schemi elettrici nelle macchine.
Lo schema circuitale normale qualche volta viene chiamato anche
schema funzionale.
Immagine 13:
Schema circuitale, rappresentazione collegata
39
Minos
Azionamenti elettrici e controlli automaticii
Una variante semplice dello schema circuitale è lo schema elettrico
complessoin cui compaiono anche conduttori multipolari che vengono
rappresentati soltanto con una linea.
I conduttori paralleli nel disegno vengono congiunti per abbassare il
numero dei lati paralleli.
Questi ultimi vengono indicati con strisce orizzontali e cifre, in particolare
per circuiti con numerosi conduttori tripolari di corrente trifase.
In sistemi complessi vengono così rappresentati soltanto i collegamenti
più importanti tra i singoli elementi.
La pianta d’insieme viene usata soprattutto nella tecnica d’istallazione
e nell’approvigionamento energetico.
Immagine 14:
40
Schema circuitale, pianta d’insieme
Azionamenti elettrici e controlli automatici
Minos
Nello schema di cablaggio gli elementi vengono disegnati nella prospettiva del cablaggio. Le singole parti, in questo caso, vengono rappresentate
come un‘unità. Così tutti i collegamenti interni si trovano in un elemento
unico e non vengono disegnati separatamente.
Nello schema di cablaggio rientrano anche altre tipologie di rappresentazione come ad es. la pianta dei cavi, gli schemi delle connessioni
e gli elenchi dei cavi. Deve essere rappresentata anche l‘occupazione
delle morse.
Nell‘elettrotecnica vengono usati anche altri schemi e diagrammi quali gli
schemi a blocchi, schemi funzionali e schemi di sistemazione generale.
Il percorso temporale di un circuito può essere rappresentato in un
£
Immagine 15:
Schema circuitale, schema di cablaggio
41
Minos
Azionamenti elettrici e controlli automaticii
1.8
Mezzi elettrici di produzione
1.8.1
Interuttori e pulsanti
Per introdurre i segnali vengono usati trasmettitori di ordini . Alcuni
segnali vengono creati anche con interruttori di prossimità o trasformatori
d‘ingresso.
La manovra di un comando elettrico avviene tramite pulsanti e interruttori.
~
con un nuovo azionamento, viene riportato nella posizione iniziale.
In base alla struttura costruttiva dei trasmettitori d’ordine, gli elementi
pulsante si differenziano in base al pulsante di contatto, al selettore con e
senza posizione d’arresto e in base alla presenza di cifratura a seconda
se si aziona con una rotazione o se è un interruttori a chiave.
A seconda della loro funzione, nel circuito di comando elettrico si distinguono portiere, apritoio e contatto di commutazione.
I contatti dei pulsanti o interruttori che vengono collegati durante
l’azionamento vengono chiamati contatti di chiusura. Invece i contatti
d’apertura, se vengono azionati, interrompono il circuito. Qualche volta
vengono usate anche le abbreviazioni NO per il contatto di chiusura, che
è normalmente aperto, dall‘inglese NO = normal opened, e NC per quello
d’apertura, che è normalmente chiuso, dall‘inglese NC = normal closed.
Una combinazione di apritoio e contatto di chiusura ha un contatto intermedio, chiamato invertitore. Gli invertitori vengono usati anche per
l‘operazione di commutazione fra due circuiti elettrici. a seconda delle
necessità il dispositivo può essere usato come contatto di chiusura o
apritoio.
I contati di un apritoio vengono descritti con i numeri 1 e 2. Invece i
contatti di chiusura con i numeri 3 e 4.
Visto che l’invertitore consiste di una combinazione di contatto di chiusura, e apritoio, il contatto intermedio porta il numero 1. Il numero 2 viene
usato per l’apritoio e il numero 4 per il contatto di chiusura.
L’azionamento del pulsante o dell’interruttore viene rappresentato mediante il simbolo di una linea interrotta sono collegati con il contatto vero
e proprio.
Una particolarità sono gli interruttori d’arresto per emergenza. Questi
pulsanti rossi fungiformi su base gialla devono essere raggiungibili facilmente. In caso di pericolo essi consentono di rendere la tensione nulla.
L‘interruttor d’arresto di emergenza è un apritoio che viene interrotti
azionando il pulsante. Per chiuderlo deve essere sbloccato l’interruttore
d’arresto.
42
Azionamenti elettrici e controlli automatici
pulsante, contatto a filo
Minos
generalmente attivo
generalmente attivo,
blocco
premere per attivare
pulsante, contatto di rottura
tirare per attivare
girare per attivare
pulsante, contatto di cambiamento
Immagine 16:
inclinare per attivare
Simboli di pulsanti e interruttori
elementi di
commutazione
contatti
molla
Immagine 17:
Pulsante con contatti di chiusura
43
Minos
Azionamenti elettrici e controlli automaticii
elementi di commutazione
contatti
molla
Immagine 18:
Pulsante con contatti di apertura
contatto di rottura
elementi di commutazione
contatto a filo
Immagine 19:
44
Pulsante con contatti di commutazione
Azionamenti elettrici e controlli automatici
Minos
²< [;; coloriin relazione alla loro funzione.
Con il rosso vengono indicati i trasmettitori d’ordine per azionare
l’interruttore d’arresto per operazioni antincendio.
Rosso stop, spento
Con il rosso vengono indicati anche trasmettitori d’ordinerivolti allo spegnimento globale del sistema. Ne fanno parte:
-
spegnere un o più motori
spegnere una parte della macchina
arresto dopo il ciclo. Se il personale durante il ciclo aziona il
$
spegnere un apparecchiatura elettrica
ripristino, combinato con una funzione per fermare
Giallo Intervento per eliminare condizioni anomale o per evitare cambiamenti indesiderati
Questo ad es. è il ripristino di unità di macchine al punto iniziale del ciclo,
prima del suo termine. L’azionamento del pulsante giallo può invalidare
alte funzioni già selezionate.
Verde Inizio o acceso
Vengono indicati con verde i trasmettitori d’ordine di azionamento globale.
Ne fanno parte:
-
avviamento di uno o più motori
avviamento di una parte della macchina
avviamento delle funzioni ausiliari
avviamento dell’apparecchiatura elettrica
collegare il circuito di comando con la tensione
§
Funzioni particolari diverse da quelle citate, possono essere associate
ad un ulteriore colore.
Questi colori possono essere usati per ogni funzione, al di fuori dei pulsante a pressione con sola funzione di arresto. Il nero ad es. viene usato
per il comando a impulsi . Il bianco viene usato soprattutto per indicare
funzioni ausiliarie che non fanno parte del ciclo lavorativo.
45
Minos
Azionamenti elettrici e controlli automaticii
>
I pulsanti possono essere azionati dall’uomo, anche in maniera meccanica
con elementi della macchina. In questo caso vengono chiamati limitato
¬
analizzano la posizione di cilindri pneumatici o idraulici vengono chiamati
interuttori cilindrici.
La commutazione dei contatti elettrici avviene con l‘azione di una forza
esterna. I pulsanti lavorano, in questo caso, con o senza.I pulsanti piccoli
nell’interno, hanno microinterruttori e vengono azionati con un pestello
o un rullo,spesso soltanto con un contatto di commutazione. I pulsanti
più grandi, azionati meccanicamente, possono avere anche un contatto
apritoio e un contatto di chiusura.
Esempi di ambiti d’uso di interruttori limitatori meccanici sono:
­
controllo della porta
interruttore per luce d’arresto
Gli interruttori limitatori meccanici invece vengono sostituiti sempre più
frequentemente da sensori che lavorano senza contatto. I sensori elettronici lavorano senza contatto, hanno una durata di vita maggiore e sono
meno sensibili ai guasti.
Immagine 20:
46
Microinterruttore
Azionamenti elettrici e controlli automatici
Minos
Un interruttore cilindrico molto semplice che lavora senza contatto è il
contato reed, che consiste in due contatti che sono fusi in un corpo di
vetro. A causa del campo magnetico di un magnete permanente nello
stantuffo del cilindro, i due contatti vengono accorciati.
Gli interuttori cilindrici che lavorano senza contatto hanno elementi elettronici che reagiscono su un magnete dello stantuffo. Questi non sono
sensibili ai campi magnetici estranei come li troviamo ad es. in impianti
di saldamento elettrico.
Un‘altra forma di interruttore di prossimità senza contatto sono i sensori
induttivi in cui si ha il contatto soltanto materiali che conducono corrente.
Gli interruttori di prossimità capacitivi, invece, sono realizzati anche in
materiali non metallici.
Gli interruttori di prossimità ottici usano mezzi elettronici e ottici per rico
~
$
}$
di luce rossa e infrarossa sono i semiconduttori - diodi luminosi. Essi
si differenzia da relè fotoelettrici unidirezionali, barriere fotoelettriche e
£­
Inoltre vengono usati interruttori senza contatto che funzionano con
l’ultrasuono.
Immagine 21:
Contatto reed
47
Minos
Azionamenti elettrici e controlli automaticii
I circuiti elettrici di solito vengono disegnati senza tensione. Se però un
pulsante o un limitatore viene azionato nella posizione iniziale questo va
rappresentato anche nello schema.
Nella posizione di azionamento, un contatto di chiusura, (ad es. di un interuttore cilindrico) assomiglia a un apritoio. Per evitare errori nell‘effettuare
l’azionamento, accanto al contatto viene messa una freccia.
Un apritoio azionato, invece, viene disegnato come un contatto di chiusura
con contatti legati. Anche in questo caso, per evidenziare l’azionamento,
accanto al contatto, deve essere inserita una freccia
otturatore
otturatore, attivo
rottura
rottura, attivo
Immagine 22:
48
Contatti azionati
Azionamenti elettrici e controlli automatici
1.8.3
Minos
Interuttori a pressione
'
$
trasduttori, (come ad es. la pressione, la portata in volume o la temperatura) vengono convertite in una grandezza elettrica analogica o digitale.
Gli interruttori a pressione servono come apparecchiatura di monitoraggio
e comando. Se una pressione prescelta viene raggiunta, questi possono
aprire o chiudere i circuiti. La pressione d’ingresso ha un effetto su una
$$$
$
elastica regolabile. Se la pressione è più alta della forza elastica, lo
stantuffo si muove e mette in azione la morsettiera.
L’interruttore pneumatico a pressione trasforma un segnale di pressione
pneumatico in un segnale elettrico attraverso un contatto di commutazione. Data la normale entità elevata delle pressioni nell’idraulica, il
dispositivo è costruito in maniera più robusta.
Per interruttori a pressione con morsettiera, azionati in maniera meccanica, la molla a elica può essere sostituita con una membrana, un tubo
ondulato o un tubo di Bourbon.
Immagine 23:
Interruttore a pressione
49
Minos
1.8.4
Azionamenti elettrici e controlli automaticii
Dispositivo di segnalazione
Di solito si distinguono i dispositivi acustici da quelli dispositivi ottici.
Per una visibilità migliore, alle lampade spia si possono aggiungere
anche delle lenti ausiliarie. In linea di massima fanno parte delle
lampade spie anche indicatori a diodo luminoso e indicatori a cristalli liquidi.
Nell’elettrotecnica le lampade spia spesso vengono usate per segnalare regimi di funzionamento. Secondo la VDE 0113 i colori da usare
sono:
Rosso
pericolo o allarme
intervento rapido. Questi stati possono essere:
­
-
temperatura fuori dei limiti (di sicurezza) previsti
l’ordine di fermare la macchina (ad es. a causa di sovvracarico)
parti elementari dell’attrezzo fermate a causa dell’impianto di protezione
- pericolo a causa di elementi che si muovono
Immagine 24:
50
lampada spia
segnale acustico,
„horn“
lampada spia, lampeggiante
sirena
posizione dell‘indicatore
gong
allarme ottico
campana
Dispositivi di segnalazione
Azionamenti elettrici e controlli automatici
Giallo
Minos
attenzione
Lampade spia gialle segnalano cambiamenti o un cambiamento previsto
delle condizioni. Ad es.:
-
la temperatura (o la pressione) non corrisponde al livello normale
sovvracarico, permesso soltanto per un breve arco di tempo
ciclo automatico in esecuzione
Verde
sicurezza
Lampade spie verdi servono per indicare un regime di funzionamento
sicuro o per approvare il funzionamento seguente. Ad es.:
il liquido di raffreddamento circola
il comando automatico della caldaia è acceso
la macchina è pronta per la partenza: tutti gli impianti ausiliari
funzionano, le unità si trovano nella posizione primitiva e la pressione
idraulica o la tensione d’uscita di un motogeneratore si trovano nell’ambito
previsto
§
ad altri colori. Inoltre si tratta di informazioni che sono legati ad richieste
speciali. Ad es.:
-
l’indicazione del comando a distanza
il preselettore nella posizione d’avviamento
un’unità nella posizione di avanzamento
microavanzamento di una slitta o di un carello
§
Lampade spia bianche sono adatti per informazioni generali. Possono
essere usati se ci sono dubbi per quanto riguarda l’uso dei tre colori
rosso, giallo e verde; così ad es. come conferma o anche per:
interruttore principale nella posizione accesa
scelta della velocità o del senso di rotazione
vengono usati attrezzi ausiliari che non appartengono al ciclo
lavorativo
Dispositivi di segnalazione come sirene, allarmi, avvisatori acustici, cicalini
e campanelli vengono usati spesso insieme con dispositivi di segnalazione ottici. Il segnale acustico in questi casi deve attirare l’attenzione
sul segnale ottico.
51
Azionamenti elettrici e controlli automaticii
Minos
1.8.5
Relè e paratoie
~
gono usati soprattutto in circuiti di comando ma anche in dispositivi di
protezione.
Anche le paratoie vengono azionate in maniera elettromagnetica, con interruttori di potenza o paratoie ausiliarie.Un esempio di applicazione sono
i circuiti elettrici in cui vengono regolati motori o riscaldamenti elettrici.
I relè consistono di una bobina magnetica e un nucleo di ferro. Se la
bobina viene attraversata da una corrente elettrica si crea un campo
magnetico e il giogo mobile viene attirato al nucleo di ferro. Tramite una
leva il giogo aziona i singoli contatti.
I collegamenti della bobina vengono segnati con A1 e A2. I collegamenti
dei contatti sono a due cifre. La prima cifra designa progressivamente
i contatti. La seconda cifra indica se si tratta di un apritoio o un contatto
di chiusura. Le cifre 1 e 2 indicano un apritoio, le cifre 3 e 4 un contatto
di chiusura.
Le paratoie hanno tre contatti principali. Questi vengono contrassegnati
$;
che vengono denominati come i relè.
relè con un cambiatore di contatti
Teleruttore con due contatti supplementari
Immagine 25:
52
Relé
Azionamenti elettrici e controlli automatici
Minos
£
la corrente rimangono nella posizione di commutazione. essi vengono
denominati (to link). Questa funzione ad es. si trova in (Stromstoßrelais)
che vengono accesi con un impulso di corrente. Il catenaccio può essere
eliminato soltanto con un altro impulso di corrente.
I relè a tempo si distinguono in due tipologie.
I relè a tempo ad azione ritardata connettono i loro contatti soltanto dopo
un certo periodo, mentre i relè a tempo di scatto ritardato connettono i
loro contatti subito dopo l’interruzione della corrente e rimangono ancora
collegati per un periodo limitato anche dopo quest‘ultima.
I relè a tempo vengono indicati con un quadrato ulteriore.
I relè a tempo ad azione ritardata si indicano con due linee incrociate
nel quadrato, mentre i relè a tempo a scatto ritardato si indicano con un
quadrato tutto nero.
I contatti di apritoio e i contatti di chiusura vengono nominati con le cifre 5
e 6, 7 e 8. Il ritardo è indicato da un semicerchio vicino al simbolo tramite
una reazione a paracadute. Al simbolo dei relè può seguire la lettera T.
relè a tempo con ritardo
relè a tempo smorzato
Immagine 26:
Relè a tempo
53
Azionamenti elettrici e controlli automaticii
Minos
1.9.
Semplici collegamenti di base
1.9.1.
Autotenuta elettrica
Un caso d’utilizzo di relè è anche l‘autotenuta elettrica che viene azionato
attrazione. Con un contatto del relè il pulsante viene rilasciato, ma il relè
continua ancora a funzionare.
La cessazione dell‘azione di autotenuta avviene con un secondo pulsan
£
corrente verso il relè viene interrotto e il relè cade.
In linea di principio ci sono due possibilità di collegament per il posizionamento dei contatti e dei pulsanti. Se ogni volta viene azionato soltanto
un pulsante, non sussiste alcuna differenza tra i due collegamenti.
Se nello stesso momento vengono azionati entrambi i pulsanti, il collegamento “dominante SPENTO” viene interrotto tramite il contatto di apertura
£
Con la variante di collegamento “dominante ACCESO” invece il relè
rimane attivato.
Visto che nell’elettrotecnica spegnere la tensione per motivi di sicurezza
ha una priorità assoluta dovrebbe essere usata soltanto la variante di
collegamento “dominante SPENTO”.
acceso
Immagine 27:
54
Autotenuta elettrica
spento
Azionamenti elettrici e controlli automatici
1.9.2.
Minos
Sequenza passo passo
Per i comandi di salita spesso vengono usati dei sequenziatori. In questo
caso i relè vengono collegati in maniera tale da venire accesi uno dopo
l’altro secondo il decorso della regolazione.
Un passo può essere eseguito soltanto se è stato effettuato il passo
precedente e se c’è stato un feed-back sullo svolgimento di quel passo.
>
nimento e sequenza continua.
Nella sequenza a spegnimento è attivo sempre soltanto un passo. È
necessario un contatto in più per predisporre la catena. Questo impulso
(di reset) deve essere fornito sempre prima di avviare la sequenza. Dato
che con i relè hanno diversi tempi di commutaizone, è possibile effettuare
pause durante la sequenza a spegnimento. Perciò le sequenze a spegnimento vengono usate soprattutto nella programmazione di controllori
programmabili.
Nella sequenza continua tutti i passi vengono effettuati uno dopo l’altro.
L’ultimo passo disattiva l’autotenuta del primo relè; a causa di ciò tutta
la catena ritorna allo stato di partenza. Un impulso di reset non è necessario. Ne circuiti con relè questo tipo di sequenziatore dovrebbe essere
sempre applicato.
catena „erasing“ sequienziale a 3 passi
Immagine 28:
catena continua sequenziale a 3 passi
Catena sequenziale
55
Minos
1.9.3.
Azionamenti elettrici e controlli automaticii
Scemi elettrici per la pneumatica e l’idraulica
Nell’elettropneumatica e nell’elettroidraulica è necessario disegnare per
ogni forma di energia uno schema elettrico proprio. In un primo schema
elettrico vengono rappresentate le componenti pneumatiche o idrauliche,
mentre nell’altro vengono rappresentati i simboli elettrici.
Una parte degli elementi costruttivi, come ad es. le bobine magnetiche o
gli interuttori cilindrici si trovano in tutti e due gli schemi. La rappresentazione nei diversi schemi però è diversa.
Visto che gli stessi elementi sono rappresentati nei due schemi in maniera
diversa, è possibile una correlazione soltanto tramite la denominazione
dell‘elemento.
Tutti e due gli schemi elettrici si contraddistinguono anche a causa del£
dall‘alto verso il basso. Negli schemi pneumatici e idraulici invece la fonte
di energia si trova nella parte bassa e le propulsioni nella parte superiore
dello schema. L’energia dunque parte dal basso e arriva in alto.
Per il collegamento elettrico spesso viene usato lo schema elettrico in
rappresentazione separata. Questo permette una buona comprensione
della funzione di collegamento. La bobina e i contatti dei relè hanno la
stessa denominazione.
Per una migliore comprensione i singoli percorsi della corrente sono
]
meri anche a percorsi della corrente che nascono da altri percorsi e non
arrivano in fondo alla sbarra collettrice.
Sotto i relè possono essere inserite delle tabelle di contatto nelle quali
viene descritto in quali percorsi della corrente si trovano i contatti di
questo relè. Se si tratta di schemi elettrici complessi, tali indicazioni sui
contatti possono essere inserite anche su altri lati dello schema. In questo
modo il ritrovamento dei contatti di un relè nello schema è notevolmente
56
Azionamenti elettrici e controlli automatici
Minos
Nell’immagine è rappresentato uno schema elettropneumatico. La parte
pneumatica dello schema consiste soprattutto in una valvola con una
bobina magnetica e un cilindro.
Nello schema elettrico è rappresentata un‘autotenuta. L’autotenuta può
essere azionata e cancellata con due pulsanti. Il contatto del relè garantisce il continuo funzionamento del dispositivo anche dopo il contatto di
chiusura.
Il circuito elettrico per la bobina magnetica viene chiuso con il relè attivato. Questo percorso della corrente determina l’emissione di segnali.
La correlazione fra bobina magnetica e schema pneumatico viene rappresentata dalla denominazione “Y1”.
Le bobine magnetiche possono essere azionate anche con altre tensioni,
spesso però viene usata la stessa tensione del circuito di comando.
Immagine 29:
Schema elettropneumatico
57
Minos
1.10
Azionamenti elettrici e controlli automaticii
Tipi di protezione
Le correnti elettriche e le tensioni si distinguono indirettamente soltanto in base ai loro risultati. Sono pertanto da rispettare alcune norme
e disposizioni per evitare i pericoli causati dall’energia elettrica.
Gli involucri per i mezzi di produzione elettrici sono realizzati per
proteggere gli stessi dal contatto non desiderato, con corpi estranei
e acqua e vengono suddivisi secondo le diverse modalità di protezione. Tali modalità sono descritte nella DIN (norma industriale
tedesca) e nella EN 60529 e indicate con le lettere IP (inglese, per:
international protection), seguiti da due cifre. Secondo il luogo d’uso
e l’uso è necessaria una protezione adatta per proteggere l’uomo
dai pericoli possibili e per assicurare il funzionamento del mezzo di
produzione.
La prima cifra indica la protezione per contatti non intenzionali con
Æ
{
0
nessuna protezione
; >_[
"
\
^ >;^_
mm (ad es. dita)
>^_
"
\
>;[
"\
5 protezione completa da contatto e protezione dal deposito di polvere nell’interno (protetto da polvere)
6
58
protezione completa da contatto e protezione dalla penetrazione
di polvere (tenuta di polvere)
Azionamenti elettrici e controlli automatici
Minos
La seconda cifra indica la protezione contro la penetrazione di acqua
con risultati dannosi:
0
nessuna protezione
0
protezione contro gocce che cadono orizzontalmente (perdite di
acqua)
;
;_¶"
di acqua che cadono inclinati)
^
[
orizzontale (acqua spruzzata)
3
protezione contro acqua che arriva da tutte le direzioni (acqua
spruzzata)
4
protezione contro acqua da un ugello (getti d’acqua)
5
protezione contro getti d’ acqua forti (protezione contro allargamento)
6
protezione contro messa sotto acqua momentanea (mettere
nell’acqua)
7
protezione contro messa sott’acqua non solo momentanea
Se necessario per una precisa descrizione possono essere aggiunte altre
lettere. Se invece una delle due cifre non viene indicata, è da sostituire
con la lettera X. Un tipo di protezione tipico ad es. per le bobine magnetiche di valvole è IP65.
59
Minos
60
Azionamenti elettrici e controlli automaticii
Azionamenti elettrici e controlli automatici
2
Controllori programmabili
2.1
Introduzione
Minos
Controllori programmabili vengono usati in tanti ambiti dell’industria per
compiti di controllo e di regolazione. Lo sviluppo dell’automatizzazione
oggigiorno è legato strettamente ai controllori programmabili.
Nei paesi di lingua inglese il controllore programmabile viene chiamato
“Programmable Logic Controller” e perciò abbreviato con PLC.
Un controllore programmabile possiede interfacce per l’introduzione e
l’emissione di segnali. Agli ingressi vengono collegati diversi tipi di sensori. Questi sensori informano il controllore programmabile dello stato
attuale della macchina o dell’impianto. Con le sue uscite il controllore
programmabile comanda le parti principali della macchina o dell’impianto.
Così il controllore programmabile sorveglia i processi di produzione e
li regola. Tante macchine sono talmente complicate che non possono
essere utilizzate senza un controllore programmabile.
gli ambiti di utilizzo dei controllori programmabili sono molto vasti. In generale essi regolano , comandano e sorvegliano i processi tecnici, ove,
in tanti casi, sostituiscono l’uomo.
Esempi di applicazioni di utilizzo dei controllori programmabili sono i
comandi di ascensori o di semafori. Anche impacchettatrici o impianti
automatici di saldatura possono essere comandati con un controllore programmabile. Un altro ambito molto importante sono i processi produttivi
automatizzati in campo automobilistico.
A causa di programmazioni diverse un controllore programmabile può
essere adatto alle più diverse richieste senza che siano necessari cambiamenti profondi nella costruzione del controllore programmabile stesso.
Con un solo controllore programmabile possono essere controllati senza problemi anche centinaia di sensori collegati allo stesso numero di
attori. Se invece ci sono poche entrate e uscite è necessario da badare
alla redditività. L’accendere di una lampada con un tasto p.es. potrebbe
essere controllato con un controllore programmabile ma questa soluzione
sarebbe decisamente più cara che un semplice cablaggio del tasto con
la lampada.
61
Minos
2.1.1
Azionamenti elettrici e controlli automatici
Storia del controllore programmabile
Prima dello sviluppo del controllore programmabile il comando di macchine e impianti si svolgeva soprattutto con comando a relé. Con i contatti
dei relè collegati parallelo o in serie si raggiungeva il percorso desiderato
del comando.
Sono stati costruiti anche comandi con dispositivi ad aria compressa.
Come nei comandi a relè sono stati usate funzioni booleane. Il relè poteva
essere o no in azione comr poteva essere presente o assente pressione.
Esistevano anche comandi che lavoravano con valori analogici.
Questi comandi oggi vengono denominati comandi Controllori a logica
cablata. A causa del complesso cablaggio dei singoli elementi era molto
impegnativo adattare il comando durante l‘aggiornamento della macchina.
General Motors nel 1968 sviluppò le basi per un controllore programmabile. Nell’epoca questo controllore è stato chiamato PC, Programmable
Computer. Visto che quest’abbreviazione presto venne usata per il
Personal Computer, la denominazione diventò PLC. Nei paesi di lingua
tedesca viene usata invece la abbreviazione SPS che sta per: Speicherprogrammierbare Steuerung.
Un controllore programmabile contiene un microprocessore ed elementi
per memorizzare il programma. La programmazione può essere eseguita
in diversi linguaggi.
Una dei linguaggi più vecchi è il diagramma a contatti. Assomiglia fortemente alla rappresentazione americana dello schema delle connessioni.
Questo era un vantaggio per i tecnici che potevano sviluppare il programma in maniera simile agli schemi elettrici ai quali erano abituati. La
semplice variazione facilitò l’uso del controllore programmabile.
Un altro motivo per l’uso del diagramma a contatti era la rappresentazione
di segni sui monitor dei computer nell’epoca. Gli schermi non lavoravano
simboli dell‘ alfabeto. Con parentesi tonde o quadre e striccie inclinate,
orizzontali e verticali il programma comunque poteva essere rappresentato sullo schermo.
Altre lingue usate erano il set di istruzioni e il diagramma logico. Il set
di istruzioni è più orientato alla macchina mentre il diagramma logico è
62
Azionamenti elettrici e controlli automatici
Minos
A causa dei loro vantaggi i controllori programmabili si diffondevano e le
X
>$
elaborati soltanto segnali binari, e solo successivamente numeri interi e
numeri a virgola mobile. Su questa base è diventato possibile elaborare
anche valori analoghi.
Nel corso del tempo c’erano sempre più produttori che offrivano uno o
più controllori programmabili. In diversi casi fra i linguaggi per la programmazione c’erano differenze.
Nell’1993 con la norma internazionale IEC 611131 (che prima fu la IEC
;;;\
trollore programmabile. Con questa norma è possibile programmare un
controllore programmabile indipendentemente dal produttore. La maggior
parte dei sistemi dei controllori programmabili è conforme a questa norma.
Accanto al set di istruzioni AWL e il ladder diagram KOP oggi viene usato
anche il linguaggio dei componenti funzionali FBS. Per comandi di esecuzione invece si preferisce il diagramma di sequenza delle funzioni AS.
Una linguaggio nuovo è anche il Testo Strutturato. Questo linguaggio è
come il set delle istruzioni orientato al testo, ma non viene molto utilizzatocomandi vicini alle macchine. Il testo strutturato perciò viene chiamato
anche lingua di programmazione più alta.
63
Minos
2.1.2
Azionamenti elettrici e controlli automatici
Paragone fra controllore cablato e controllore programmabile
Il controllore cablato rappresenta una tipologia di programazione di comandi e regolazioni nell‘automatizzazione. Questo tipo di programmazione viene denominato anche hardwired controler. E‘ sbagliata invece
la denominazione ‘comando convenzionale’.
singoli elementi costruttivi. Il collegamento avviene tramite cablaggio o con
il collegamento di una piastra con circuito stampato. Se ci sono variazioni
£
parte dei casi le variazioni nel programma implicano il cambiamento delle
dotazioni dei singoli elementi.
In ambiti di automatizzazione complessa oggigiorno non viene più usato il
controllore cablato. In impianti più piccoli però è ancora possibile trovarli.
L‘utilizzo attuale e futuro dell‘hardwired controler è fondamentale
nell‘ambito della sicurezza garantendo il funzionamento anche in caso
di guasto del controllore programmabile. Per questo motivo attualmente l‘hardwired controler è concepito soprattutto come complemento del
controllore programmabile.
Nel controllore programmabile le principali indicazioni di comando sono
contenute nel software. Anche se si tratta di diverse versioni di programmi
il cablaggio del controllore programmabile può rimanere lo stesso.
Nella realizzazione di una singola macchina, lo sviluppo e la costruzione di un controllore programmabile richiede un tempo paragonabile a
quello che è necessario per scrivere un programma per il controllore
programmabile stesso. Nell‘ipotesi di realizzazione di diverse macchine
simili, invece, il programma per il controllore programmabile deve essere
sviluppato soltanto una volta. Il dispendio di cablaggio del controllore
programmabile, in questo caso, è decisamente più basso. Per innestare
tensioni più grandi o pesi maggiori, sono però sempre necessari relè o
contattori.
Ma anche in macchine diverse possono essere usati nuovamente certi
elementi del programma del controllore programmabile. È anche possibile
testare i programmi prima del termine di produzione della macchina.
64
Azionamenti elettrici e controlli automatici
2.1.3
Minos
Vantaggi e svantaggi di un controllore programmabile
Uno dei principali vantaggi del controllore programmabile è la facile moX
funziona subito. Normalmente il funzionamento desiderato è subordinato
~
non è necessario.
Il materiale e l‘ingombro necessari per un comando con controllore
programmabile sono minori di quelli di un controllore con relè. Tempi e
contattori vengono realizzati con il software così che non sono necessari
relè a tempo.
Un programma una volta scritto può essere copiato per successive
utilizzazioni in base alle necessità. Per lo sviluppo di comandi analoghi
il programma deve essere scritto soltanto una volta è può essere poi
caricato sul controllore programmabile. Il cablaggio che in altri ambiti
controllore programmabile. La trasmissione dei programmi può avvenire
elettronicamente in tutti i posti del mondo.
Se un programma di un controllore programmabile è scritto, è semplice
aggiungere alle singoli indicazioni commenti. Il programma a causa di
questo dopo è comprensibile con più facilità.
Gli sviluppi indipendenti della macchina e del software per il controllore,
consentone un notevole risparmio in termini di tempo. Il programma può
essere sviluppato parzialmente e simultaneamente da diversi gruppi.Le
singole parti risultanti da questa stesura preliminare possono essere e
messo insieme a consuntivo. Anche a causa della scarsa complessità
del cablaggio si risparmia tempo.
Un altro vantaggio del controllore programmabile è la possibilità di manutenzione e diagnosi a distanza. La macchina o l’impianto può essere
comandato anche in remoto o, nell‘ipotesi di errori, controllato senza la
visita di un tecnico.
Occorre ricordare, inoltre, che il consumo di energia di un controllore
programmabile è più basso di quello di un controllore a relè.
Tra gli svantaggi del controllore programmabile occorre ricordare il dispendio elevato per il controllore e il software la necessità di personale
Anche per impianti piccoli sono necessari strumenti per la programmazione, misure per la sicurezza dei dati e, in generale, supporti per la
registrazione dei dati. in un controllore programmabile viene trasmesso
soltanto il codice del programma. Il testo originale per tanto,rimane salvato in forma legibbile.
65
Minos
Azionamenti elettrici e controlli automatici
2.2
Struttura di un controllore programmabile
2.2.1
Tipi di controllori programmabili
Un controllore programmabile può essere usato per diversi compiti. La
sua costruzione sarà differente a secondadell‘ambito di applicazione.
Un controllore programmabile compatto consiste di un unico elemento
con un numero limitato di entrate e uscite. Il numero delle entrate è
normalmente superiore al numero delle uscite, ad esempio, ci possono
essere 10 entrate e 6 uscite.
Altri allacciamenti del controllore programmabile sono utilizzati per
l’alimentazione di corrente elettrica. A seconda del tipo di costruzione, il controllore elettrico viene alimentato con 24 V o con 230 V. Se
l‘alimentazione è a 230 V, una parte della rete deve essere integrata nel
controllore programmabile.
Un incremento del numero delle entrate e uscite spesso non è possibile. Qualche volta al controllore programmabile può essere aggiunto un
modulo ulteriore per consentire altri allacciamenti.
Un controllore programmabile compatto ha un prezzo conveniente e
perciò può essere usato soprattutto in piccoli impianti.
Entrate
Eingänge
24 V
Immagine 29:
66
Controllore programmabile compatto
Uscite
Ausgänge
Azionamenti elettrici e controlli automatici
Minos
Un controllore programmabile modulare consiste in un contenitore in cui
possono essere inseriti diverse schede. Sono necessarie almeno le schede per l’alimentazione elettrica e l’unità calcolatrice vera e propria. Queste
schede vengono chiamate scheda dell’alimentatore e unità centrale.
Il numero delle entrate e uscite dipende dal numero delle schede inserite.
Le schede d’ingresso normalmente hanno 16 o 32 ingressi. Le schede
d’uscita spesso hanno 8 o 16 uscite. Le schede con meno uscite possono
fornire una corrente più alta in uscita rispetto alle schede con numero
di uscite superiore. In questi casi l’uso di relè aggiunti non è sempre
necessario.
Il numero massimo di entrate e uscite possibili dipende dalla capacità
dell’unità centrale e dal contenitore. Per un controllore programmabile
sono possibili senza problemi alcune centinaia di entrate e uscite. Come
nel controllore programmabile compatto, anche in questo caso sono
possibili ampliamenti tramite dispositivi aggiuntivi.
Un controllore programmabile modulare può essere ampliato facilmente
inserendo altre schede. È possibile anche l’uso di altre schede con uguale
numero di entrate e uscite.
Energia
Netzteil Unità
ZentralEinheit
centrale
Entrate
Eingänge
Uscite
Ausgänge
slot
freieliberi
Steckplätze
24 V
Immagine 30:
Controllore programmabile modulare
67
Minos
Azionamenti elettrici e controlli automatici
Accanto ai controllori programmabili classici oggigiorno vengono usati
sempre di più PC per compiti di controllo e di guida. I PC più vecchi,
$X
trollore programmabile.
~
mabile slot. Tale dispositivo prevede l‘inserimento di alcune schede in
un PC normale. Il sistema operativo del PC in questo caso può essere
Windows o Linux.
Il controllore programmabile slot ha un sistema operativo suo e perciò
lavora in modo totalmente indipendentemente dal software del PC. Il
collegamento a sensori e attori può essere ottenuto con un sistema –
La presenza di un sistema di alimentazione di energia elettrica e batterie
tampone consente al controllore programmabile di continuare a lavorare
se il PC smette di farlo o se il sistema operativo non funziona. Inoltre
il controllore programmabile slot, come un controllore programmabile
normale, può memorizzare temporaneamente dati e garantire così un
ripristino corretto.
Il controllore programmabile slot può scambiare dati con il software del PC
tramite il bus del PC utilizzando quindi il PC per compiti di visualizzazione.
Anche la memorizzazione dei dati di produzione è possibile con il PC.
Per un controllore programmabile slot senza fornitura di energia elettrica propria, le funzionalità del controllore programmabile dipendono dal
funzionamento del PC. Uno svantaggio del controllore programmabile
slot consiste anche nel fatto che la loro realizzazione era stata studiata
per il sistema ISA-bus dei PC. L’uso di questi controllori programmabili
slot in PC nuovi, quindi, non è più possibile perché questi hanno soltanto
connettori PCI. L‘uso di un controllore programmabile con un PC di nuova
generazione, dunque, non è possibile.
L‘eventuale acquisto di un nuovo PC, quindi, implica anche l’installazione
di un nuovo controllore programmabile slotche consta però di velocità più
elevate rispetto ai sistemi integrati con PCI-bus. È possibile quindi una
comunicazione più veloce con hardware e software del PC.
Una tipo particolare di controllore programmabile è la cosiddetta morsetta
bus che viene usata come una morsettiera normale per segnali digitali .
Tale dispositivo ha le stesse funzioni di un controllore programmabile. e il Il
suo compito principale consiste nel creare un legame con un sistema bus.
68
Azionamenti elettrici e controlli automatici
Minos
Un‘altra possibilità d‘uso del PC con funzione di controllo, consiste nell’uso
del un controllore programmabile soft. Si tratta di una soluzione esclusivamente software, che usa il processore del PC. Il controllore programmabile
soft in questo caso deve condividere la prestazione resa dal processore
con il sistema operativo e possibilmente con altre software in uso.
Un problema in questo senso può essere la necessità che il software
del controllore programmabile porti a termine le sue funzioni in tempo
reale. Inoltre per un controllore programmabile soft, nell‘ipotesi di guasto
di un programma complementare, tutto il controllore non funziona più.
In ambiti con necessità di elevati livelli di sicurezza quindi, i controllori
programmabili non vengono usati.
Spesso i controllori programmabili costruiti per l’industria utilizzano un
sistema touch- screen per la sorveglianza dei singoli i percorsi. In questo
senso non è richiesta l‘installazione di ulteriori dispositivi.
La programmazione di un controllore programmabile soft e quella di un
controllore convenzionale avvengono in maniera simile. Per questo motivo, durante corsi formativi si usano spesso controllori programmabili soft.
Touchscreen
Touchscreen
Immagine 31:
Controllore programmabile soft
69
Azionamenti elettrici e controlli automatici
Minos
2.2.2
Funzione di un controllore programmabile
Fondamentalmente la struttura di un controllore programmabile è analoga a quella un PC normale. Un controllore programmabile consiste di
hardware è software dedicato.
£
{
I
E
U
Introduzione
Elaborazione
Uscita
Alle entrate i segnali elettrici dei sensori o generalmente degli elementi di
segnalamento vengono accolte. In questa fase accade una separazione
galvanica dei segnali tramite fotoaccopiatori. Tale operazione evita che
tensioni troppo alte arrivino nel controllore programmabile e causino difetti.
Nell’unità centrale segue l‘elaborazione dei dati. Per il lavoro di calcolo è
responsabile il CPU, il processore principale. Inoltre nell’unità centrale si
'
¦
possono anche essere lasciati, cioè memorizzati.
porta
di programmazione
Schnittstelle
für Programmierung
entrate
Eingänge
E 0.7
alimentaziSpannungsversorgung
one
Immagine 32:
70
V
unità
centrale
Zentraleinheit
supporto
energetico
Netzteil
Costruzione di un controllore programmabile
A
isolamento
galvanico
galvanische
Trennung
E
galvanische
Trennung
isolamento
galvanica
E 0.0
A 0.0
uscite
Ausgänge
A 0.7
Azionamenti elettrici e controlli automatici
Minos
elettrica. E‘ comunque possibile leggere e scrivere velocemente i dati.
¦
&
si trova anche il sistema lavorativo del controllore programmabile. I dati
¦
~¦<<%¦cellabile con la corrente. Con questo dispositivo è possibile caricare
nuove varianti del sistema lavorativo nel controllore programmabile. Il
programma del controllore programmabile permane in questa memoria
anche a seguito di una perdita di tensione nel controllore programmabile.
>
Anche il numero dei cicli di lettura e scrittura sono minori.
Un‘altra parte dell’unità centrale è il temporizzatore. Tale dispositivo
stabilisce con che velocità lavorano i singoli elementi del controllore
programmabile, in particolare il processore centrale.
X£
programmabile, sono chiamate Interrupteingänge. Spesso sono da trovare nell’unità centrale.
L‘unità centrale è dotata di un‘interfaccia per registrare il programma. A
seconda del modello del controllore programmabile questa può essere
un interfaccia in serie o un collegamento ethernet per un cavo di rete.
Tramite quest’interfaccia possono essere letti anche dati dal controllore
programmabile.
Le uscite come le entrate sono separate in maniera galvanica dal resto
del controllore programmabile. Questo è possibile grazie a contatti di relè
o a fotoaccopiatori alle uscite, che vengono innestati tramite transistori.
Al posto delle schede d’uscita per uscite digitali è possibile anche l’uso
di schede d’uscita per uscite analoghe. Il collegamento con i sistemi bus
avviene tramite un bus-master.
La rete alimenta l’intero controllore programmabile con energia elettrica.
La rete viene alimentata con 230 V o con 24 V. Spesso la tensione viene
abbassata a 5 V dall’unità centrale. Per neutralizzare le interruzioni di
tensione la rete può essere attrezzata con una batteria tampone.
La suddivisione nei singoli elementi in un controllore programmabile con
schede è molto ben visibile. In altri tipi di dispositivo non è così semplice,
nonostante l‘esistenza di i singoli elementi.
71
Azionamenti elettrici e controlli automatici
Minos
2.2.3
Svolgimento del programma di un controllore programmabile
Il programma per un controllore programmabile viene sviluppato attraverso un apparecchio per programmare. Spesso l’apparecchio è un normale
PC . In seguito il programma viene caricato sul controllore programma
X¥~Î
svolgimento del programma.
Il programma consiste in diverse istruzioni che vengono svolte una dopo
]
¥
Î
del programma vengono saltate.
Se l’ultima indicazione è stata eseguita/completata il programma inizia a
lavorare da capo. Questo procedimento viene chiamato modo operativo
ciclico-seriale.
¥Î
Prima del primo ordine, inoltre, tutte le entrate vengono lette e memorizzate. Se le entrate cambiano durante lo svolgimento del programma,
ciò non viene considerato. Dopo l’ultimo ordine vengono designate le
che si sta svolgendo.
Ciò implica un determinato tempo (del ciclo) che è necessario per lo svolgimento del programma. Un entrata messa nuovamente dunque viene
considerata in uscita soltanto se è trascorso il tempo dell‘intero ciclo.
La durata del ciclo dipende dal numero e dalla modalità delle istruzioni.
X
£
assegnazioni
Anweisungen
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
lettura
entEingänge
ratelesen
Immagine 33:
72
uscite
Ausgänge
Sprung
salto
Lo svolgimento del programma
setzen
Azionamenti elettrici e controlli automatici
2.3
Minos
Le basi della tecnica digitale
Per poter programmare un controllore programmabile sono indispensabili le conoscenze di base nell’ambito delle tecnica di automatizzazione.
Necessarie sono anche conoscenze del PC e dell’apparecchio di programmazione. Per l’uso del PC sono necessarie esperienze con il sistema
operativo del computer.
Le basi per la programmazione e le funzioni del controllore programmabili
sono da ceracre nella matematicadel sistema. Per tale motivo è necessario dare uno sguardo ai diversi sistemi numerici.
Comprensibile per l’uomo è il sistema decimale che si basa sulle cifre da
[
moltiplicazione, divisione e il calcolo della potenza infatti sono conosciuti.
Un altro sistema più vecchio si basa sul numero 12. Ancora oggi p.es.
dodici parti vengono chiamati una dozzina. Nella lingua tedesca esisteva
inoltre la parola “Schock” che oggi è quasi sconosciuta e si utilizzava per
indicare cinque dozzine, cioè 60 parti. La durata di un giorno può essere
divisa in due volte dodici ore e ogni ora in 60 minuti. Anche la suddivisione
del cerchio in gradi è possibile in base 60.
Con questi sistemi di numeri un controllore programmabile però non può
%
[;]
plicemente che un segnale c’è o non c’è. Lo “0” corrisponde al segnale
“SPENTO” e l’”1” al segnale “ACCESO”. Vengono usati anche i segni “L”
e “H”, che nella lingua inglese stanno per low e high.
Questo sistema viene chiamato sistema numerico binario. Inoltre viene
usato anche il sistema esadecimale che si basa sul numero 16. Una terza
variante è il sistema BCD.
La comprensione di questi sistemi è necessaria per tanti usi, p.es. per
l’elaborazione di una tabella con i valori di comando, durante i calcoli elett
E‘ indifferente se il controllore programmabile comanda un ascensore, se
X
per la produzione di una macchina. La base è sempre il sistema binario.
73
Azionamenti elettrici e controlli automatici
Minos
2.3.1
Bit e byte
Bit è l’abbreviazione per “binary digit”. È l’unità d’informazione più piccola
possibile. Un bit può avere soltanto gli stati “0” o “1”. Nei comandi elettrici
&
Informazioni possono consistere di più bit. L‘insieme di di otto bit viene
chiamato byte. Il bit che si trova più a destra ha il valore più basso e
quello più a sinistra il valore più alto.
Gli otto bit di un byte possono essere suddivisi anche in gruppi a quattro.
Questi due gruppi vengono chiamati nibbles.
Mentre con un bit possono essere rappresentati soltanto gli stati 0 e 1,
un nibble può avere sedici stati differenti. Dunque un byte che consiste
di due nibbles, può avere 256 diversi stati. La sottodivisione di un byte
in due nibbles viene chiarita nel sistema esadecimale.
Per la rappresentazione di informazioni complesse due byte vengono
collegati e chiamati ... (word). Un ... (word) contiene 16 bit, due parole
o quattro bit sono un …. (double word). Questo include 32 bit singoli.
U, I
quattro
vier Bitbit
H
bitBit
1
L
byte
Byte
1
0
1
1
t
10101101
Wort 1 0 0 1 1 0 0 1 1 1 1 0 0 1 0 0
parola
parola
Doppeldoppia
wort
Immagine 34:
74
11001011001110110110011010010110
Bit e byte
Azionamenti elettrici e controlli automatici
2.3.2
Minos
Sistemi numerici
I sistemi numerici vengono descritti con tre caratteristiche: con la base
o numero basilare, con le singole cifre e il valore posizionale delle cifre.
;[<
$[
In base al loro valore posizionale queste cifre vengono moltiplicate con
le potenze di 10.
Esempio
Il numero 247 è dato dalla somma 2 · 102 + 4 · 10 + 7 · 1. Le posizioni
vengono chiamate rispettivamente centinaio, decina e unità.
In altri sistemi possono essere usati altri numeri come base. I numeri
binari si basano sul 2 e gli esadecimali sul 16. Se vengono usati diversi
sistemi c’è da stare attenti a non scambiarli fra di loro.
I sistemi vengono denominati come segue: Il sistema decimale con un 10
basso/profondo. Il sistema binario con un 2 basso/profondo. Nel BCDcode con un BCD basso/profondo.
Esempio
2.3.3
Sistema decimale
Sistema binario
Sistema esadecimale
BCD-Code
24710.
10102.
8AC316.
1101 1010 0110BCD.
Sistema binario
Il sistema binario si basa sul 2. Perciò esistono soltanto le cifre 0 e 1.
Per facilitare la lettura le cifre vengono rappresentate in gruppi di quattro.
Esempio
1110 1001 0010 0101
Dalla destra alla sinistra le posizioni hanno il valore 1, 2, 4 e 8. Un numero
binario che consiste di quattro 1, ha il valore decimale 15. Il numero più
grande decimale che si possa rappresentare nel sistema binario con 8
posizioni è il 255.
Come prevedibile nel sistema binario sono necessari molte più posizioni
che nella rappresentazione con numeri decimali. Ne segue che per la
programmazione con numeri più grandi non basta un byte. Per i numeri
più grandi vengono usati numeri binari con 16 o 32 posizioni.
~;
&
[
a 65353, il … (double word). Una parola con 32 posizioni può rappresen[^ª^_
75
Azionamenti elettrici e controlli automatici
Minos
Per la rappresentazione durante la programmazione di numeri negativi
si stabilisce, che il bit con il valore più grande determina il segno.
Come metodo per la marcatura dei numeri negativi viene usato il metodo
del complemento a due. I numeri negativi vengono rappresentati quindi
tali che la somma di due numeri con lo stesso valore assoluto e segno
opposto è pari a zero.
Fra i numeri positivi il bit più a sinistra ha valore 0, mentre un numero
negativo viene rappresentato con 1. Questo bit viene chiamato anche
Vorzeichenbit.
Il calcolo di un numero positivo a partire da un numero negativo con lo
stesso valore assoluto si ottiene con la costituzione del complemento a
due che consiste nella negazione di tutti i singoli bit. Tutte le cifre con
;[
;
al risultato.
Esempio
Conversione del numero decimale 5 nel numero decimale -5:
510 = 01012
01012 negare a 10102
12 sommare a 10102 + 12 = 10112
10112 = –510
In relazione al numero di bit, il numero positivo massimo è ottenibile se
tutte le posizioni più a sinistra sono occupate di un 1. Per un numero di 8
bit il numero massimo ottenibile è dunque 0111 11112. Nella rappresentazione decimale questo corrisponde al numero +12710.
Esempio
In relazione al numero di bit, il numero negativo, massimo in valore
assoluto, è ottenibile se la prima cifra a sinistra ha il valore 1 e tutti le
altre cifre sono uguali a 0. Tra i numeri a 8 bit quindi, il numero negativo
massimo in valore assoluto è 1000 00002, che nel sistema decimale
corrisponde a –12810
Numero decimale: 25 corrisponde con il mumero 8-Bit:
Numero decimale:–25 corrisponde con il numero 8-Bit:
0001 1001
1110 0111
Inoltre la somma di due bit uguali è pari a zero con riporto 1.
Addizionando tutti e due i numeri tutte le cifre saranno pari a 0, mentre
il nono bit, che in questo caso non può essere rappresentato, assume
il valore 1.
76
Azionamenti elettrici e controlli automatici
Minos
Per una comprensione migliore in seguito si trovano i valori dei numeri
positivi e negativi nel sistema binario per …. (ganzzahlige) e numeri
binari a quattro cifre.
2.3.4
numero decimale positivo
0
1
2
3
4
5
6
7
numero duale positivo
0000
0001
0010
0011
0100
0101
0110
0111
numero decimale negativo
-1
-2
-3
-4
-5
-6
-7
-8
numero duale negativo
1111
1110
1101
1100
1011
1010
1001
1000
Sistema esadecimale
Il sistema esadecimale si basa sul numero 16. Per la rappresentazione
$
[
usate le lettere A, B. C, D, E, e F.
;[;_
I posti/ le posizioni nel sistema esadecimale hanno – iniziando dalla destra
– i valori 160 = 1, 161 = 16, 162 = 256 e così via per le posizioni seguenti.
I sistema esadecimale viene usato per rappresentare con possibilmente
poche cifre numeri grandi. Ogni cifra corrisponde con un …. (nibble) cioè
un numero binario a quattro cifre. Con due cifre nel sistema esadecimale
può essere rappresentato in byte intero, mentre nel sistema binario sarebbero necessari otto posti.
Un byte consiste di 8 bit e viene rappresentato p.es. con 1111 1111. FF
sta per lo stesso numero nella rappresentazione esadecimale.
Nella tecnica di comando il sistema esadecimale viene usato anche
%&$[
lettere necessari per l sistema esadecimale sono da trovare sulla tastiera.
77
Minos
Azionamenti elettrici e controlli automatici
Nella tabella sono indicati i numeri a una cifra del sistema esadecimale
e i loro valori corrispondenti nel sistema decimale e binario.
numero esadecimale
016
116
216
316
416
516
616
716
816
916
A16
B16
C16
D16
E16
F16
2.3.5
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
numero decimale
010
110
210
310
410
510
610
710
810
910
1010
1110
1210
1310
1410
1510
numero binario
=
00002
=
00012
=
00102
=
00112
=
01002
=
01012
=
01102
=
01112
=
10002
=
10012
=
10102
=
10112
=
11002
=
11012
=
11102
=
11112
Sistema di numeri (BCD)
"§'\
¦$
$[;%
$ [ necessari quattro posti. Questi quattro posti collegati vengono chiamati
„nibble“ o anche „tetrade“.
%"§'\
]
­­^­;$­­^­;
il valore dei posti e corrispondono con i posti nel sistema esadecimale.
%&
}
BCD dunque sono un sottoinsieme dei numeri esadecimali, nella quale
$[biati in valori binari, così che ogni gruppo di quattro del sistema binario
corrisponde ad un numero decimale. Questo rende più leggibile i numeri.
I segni non usati non rappresentano numeri (BCD) validi. Vengono chi ¤
¥ premonitori, riporti o virgole.
78
Azionamenti elettrici e controlli automatici
Minos
Se numeri decimali a più cifre vengono rappresentati nel codice BCD, i
gruppi di quattro vengo messi semplicemente una dopo l’altro, separati
da uno spazio o barra spaziatrice.
Esempio
ª_^§'
0011 0111 0101 0010 ordinato 0011011101010010
Visto che un byte consiste di 8 bit con un byte possono essere rappresen$]X
sistema BCD, il numero risultante viene chiamato numero BCD o „paked“.
]§'
valore minimo di un byte e i quattro bit che rimangono sostituiti con 0, si
parla di un numero BCD „non paked“.
$[
BCD appartenenti al codice 8-4-2-1:
Numero decimale
0
1
2
3
4
5
6
7
8
9
Numero BCD 8421
0000
0001
0010
0011
0100
0101
0110
0111
1000
1001
Le seguenti combinazioni non vengono usate:
Numero decimale
Numero BCD-8421
10
1010
11
1011
12
1100
13
1101
14
1110
15
1111
Tanti microprocessori possono lavorare con la matematica BCD. CIò è
£
Il codice BCD si usa anche in sistemi di controllo p.es. per gestire display
LCD o LED.
79
Minos
Azionamenti elettrici e controlli automatici
2.3.6 Numeri interi
Numeri interi sono, come dice il nome, numeri interi nell’ambito dei numeri binari. Durante la programmazione questo tipo viene denominato
<¬<
<¬<&
<¬<
<¬<
il bit con il valore più alto, dunque il bit che sta più alla sinistra.
Se si tratta di un numero con segno, al bit più a sinistra differisce a seconda se il numero è positivo o negativo. Nel caso di un numero negativo
il bit ha il valore uno.
Il bit più a sinistra con il valore più alto viene chiamato anche „most si¥]§>
>
]§
Gli integer possono consistere in serie di bit con diverse lunghezze. Un
<¬<
]
ta di un integer senza segno, tutti gli otto bit possono essere usati per
utili in tal senso sono soltanto sette.
Dunque per numeri integer con la lunghezza di un byte possono essere
rappresentati i seguenti campi di numeri decimali:
Con segno
Senza segno
Gli integer che hanno un lunghezza di 16 bit, dunque due byte, vengono
¤|¥%>
di numeri decimali:
Â;^;^ª
[^__
Se la lunghezza dei dati è 32 bit questi vengono chiamati „double word“
o „double integer“. In questo caso l‘intervallo di numeri decimali rappresentato è il seguente:
Â^ª^ªª
[___
I di nuntervalli di numeri più grandi possono essere rappresentati con
interger di lunghezza pari a 64 bit o a 128 bit.
Â^;ª^;ªª
[^ª^_
Si possono ottenere gamme più grandi usando 64 bit oppure 128 bit
lungo i numeri interi.
80
Azionamenti elettrici e controlli automatici
Esempio
Minos
La trasformazione di un integer con segno in un numero decimale viene
fatta come segue:
Integer:
0000 0000 0010 1100
numero decimale:
+(32 + 8 + 4) = +44
integer:
1111 1111 1101 0
numero decimale:
–((32 + 8 + 2 + 1) + 1) = –44
Il numero 1 aggiunto al numero integer si basa sul calcolo del complemento a due.
Se il codominio è uguale all‘insieme dei numeri interi, i calcoli sono esatti.
Soltanto se il risultatodi un‘addizione non appartiene a codominio intero&£|
Gli integer vengono usati anche per contare. In questo caso l’integer
viene aumentato o diminuito di una unità.
2.3.7
Numeri a virgola mobile
I numeri a virgola mobile sono numeri frazionari con segno. Questa
rappresentazione è necessaria per numeri molto piccoli o grandi. La
£
£
<
(reali). Tali numeri sono rappresentati da mantissa (m ) e l’esponente (a).
#
Sulle calcolatrici questa rappresentazione viene chiamata formato scien$$
nell‘utilizzo della base 2.
<
componenti e hanno una lunghezza di 32 bit. La mantissa ha una lunghezza di 23 bit più un bit per il segno. L’esponente della base 2, invece,
ha una lunghezza di 8 bit. Visto che anche l‘ esponente è dotato di un
segno , il suo valore è contenuto nell‘intervallo fra -126 e + 127.
><
maniera binaria è 1,111... · 10127, che nel sistema decimale corrisponde
circa a 3,4 · 1038. Il più piccolo numero decimale rappresentabile è invece
1,175 · 10–38.
81
Azionamenti elettrici e controlli automatici
Minos
<^]Ʀ
<$$
¦¬<
ultimi hanno una lunghezza di 64 bit. ciò consente sia la rappresentazione di numeri ancora più grandi o più piccoli, sia l‘aumento del livello
di precisione dei numeri. Ciò è garantito dall‘utilizzo di ben 52 bit solo
per la mantissa.
Il calcolo con i numeri a virgola mobile è sempre un po’impreciso, a causa
degli arrotondatamenti. Anche trasformando numeri con virgola mobile
decimali in numeri con virgola mobile binari possono insorgere degli errori
di arrotondamento. Il valore normale di un controllore programmabile ha
una precisione di sei cifre decimali.
Durante la programmazione è importante stare attenti a non sommare
<¬<<%&
necessasio rendere omogeneo il tipo di dati con eventuale conversione
degli stessi
Esempio
Esempio …. .(integer) 7
valore a virgola mobile 7,0
Anche se tutt’e due valori dal punto di vista matematico hanno la stessa
grandezza durante la programmazione bisogna prestare attenzione ai
formati dei numeri.
2.4
Collegamenti binari
In fase di conversione gli stati binari 0 e 1 e variabili di diversa natura
devono essere collegati fra di loro. Tutti i collegamenti si possono ricondurre a tre di base.
I due collegamenti E ed O collegano sempre due cambiamenti di stato
a un risultato. Il terzo collegamento di base è la negazione, chiamata
anche NON.
Inoltre spesso, durante la programmazione del controllore programmabile
è necessario il collegamento Esclusivo-O.
Un‘altra possibilità del collegamento tra gli stati dei segnali consiste in
££%>
$
££
££
I singoli collegamenti verranno descritti in seguitoe saranno indicate anche
le rappresentazioni nei diversi linguaggi di programmazione.
82
Azionamenti elettrici e controlli automatici
2.4.1
Minos
Collegamenti E
Il collegamento E viene chiamato anche congiunzione. Collega due
entrate ad una uscita. Soltanto se esiste un segnale per tutte e due le
entrate, ci sarà un segnale anche in uscita.
Tabella della verità:
E1
0
0
1
1
E2
0
1
0
1
A
0
0
0
1
Come simbolo per il collegamento logico E viene usato il segno &. Spesso
viene usato anche un simbolo che assomiglia ad una v capovolta. Nella
notazione matematica può essere utilizzato anche un punto (da non
confondere con il segno della moltiplicazione).
E1& E2 = A
E1 E2 = A
E1 E2 = A
simbolo logico grafico
Logik-Bildzeichen
E1
&
E2
A
diagramma
del circuito elettrico
Schaltbild
Elektrik
diagramma
„gerarchico“
Kontaktplan
E1
E2
A
diagramma del circuito pneuSchaltbild Pneumatik
matico
A
E1
E1
E2
A
Immagine 35:
E2
Collegamenti E
83
Azionamenti elettrici e controlli automatici
Minos
2.4.2
Collegamento O
Il collegamento O viene chiamato anche disgiunzione. Collega due entrate
ad una uscita. Se esiste almeno una delle due entrate ci sarà anche un
segnale di uscita.
Tabella della verità:
E1
0
0
1
1
E2
0
1
0
1
A
0
1
1
1
Come simbolo per il collegamento O viene usato la barra obliqua /. Spesso viene usato anche un simbolo che assomiglia a un v. Nella notazione
matematica può essere usato anche il segno + (da non confondere con
il simbolo dell‘addizione).
E1/E2 = A
E1 E2 = A
E1 + E2 = A
simbolo
grafico logico
Logik-Bildzeichen
E1
≥1
E2
A
diagramma
gerarchico
Kontaktplan
E1
A
E2
diagramma
del circuito elettrico
Schaltbild Elektrik
diagramma del circuito pneumaSchaltbild Pneumatik
tico
A
E1
E2
A
Immagine 36: Collegamenti O
84
E1
E2
Azionamenti elettrici e controlli automatici
2.4.3
Minos
Negazione
La negazione trasforma un’entrata in un uscita con valore opposto. Se
X
"
del segnale). Al contrario, se in uscita non c’è alcun segnale, esisterà
sicuramente un segnale all’ingresso.
Tabella della verità:
E1
0
1
A
1
0
Come simbolo per la negazione viene usato una linea sopra la lettere
indicative del segnale. Spesso viene usato anche un simbolo che consiste in una striscia orizzontale con un segmento verticale collegato ad
un‘estremità.
Nella notazione matematica, un altro simbolo per la negazione è un
piccolo cerchio.
E1= A
E1= ¬ A
simbolo grafico logico
Logik-Bildzeichen
E1 1
A
Schaltbild Elektrik
diagramma
del circuito elettrico
Kontaktplan
diagramma
gerarchico
E1
A
diagramma
delPneumatik
circuito pneumaSchaltbild
tico
E1
A
E1
A
Immagine 37:
Negazione
85
Azionamenti elettrici e controlli automatici
Minos
2.4.4
Affermazione
2.4.4 Affermazione
L’affermazione viene chiamata anche identità. Se all’ingresso
non c’è un segnale anche l’uscita non sussisterà alcun segnale.
Viceversa,ovviamente, in uscita c‘è un segnale se all’ingresso c’è un
segnale.
Tabella della verità:
E1
0
1
A
0
1
Come simbolo per l’identità viene usato il simbolo di uguale.
E1=A
simbolo grafico logico
Logik-Bildzeichen
E1 1
A
diagramma
del circuito elettrico
Schaltbild
Elektrik
diagramma
gerarchico
Kontaktplan
E1
diagramma del circuito pneumatico Schaltbild Pneumatik
E1
A
E1
A
Immagine 38:
86
Affermazione
A
Azionamenti elettrici e controlli automatici
2.4.5
Minos
NAND (E NO)
Il collegamento E-NO viene denominato anche „scheffer stroke“. La
denominazione NAND deriva dall’inglese NOT per NO e AND per E. Il
collegamento E-NO collega due entrate con un collegamento E. Successivamente il risultato ottenuto viene negato. Così il collegamento E-NO
viene sviluppato da queste due funzioni logiche.
Tabella della verità:
E1
0
0
1
1
E2
0
1
0
1
A
1
1
1
0
Nel simbolo per il collegamento E-NO le due entrate vengono segnate
insieme con una linea sul simbolo dei due segnali, come nel caso della negazione. Qualche volta viene usato anche una striscia verticale
(scheffer stroke).
E1 E2 = A
E1|E2 = A
simbolo grafico logico
Logik-Bildzeichen
E1
&
A
E2
diagramma
gerarchico
Kontaktplan
E1
A
E2
diagramma
del circuito elettrico
Schaltbild
Elektrik
diagramma
delPneumatik
circuito pneumaSchaltbild
tico
A
E1
E2
A
Immagine 39:
E1
E2
E NO
87
Azionamenti elettrici e controlli automatici
Minos
2.4.6
NOR (O NO)
¦
¦¦
NO e O. Il collegamento O NO collega due entrate con un collegamento
O. Successivamente il risultato viene negato. Così un collegamento O
NO può essere sviluppato da queste due funzioni logiche.
Tabella della verità:
E1
0
0
1
1
E2
0
1
0
1
A
1
0
0
0
Nel simbolo per il collegamento O-NO le due entrate vengono segnate
insieme con una barra messa sopra.
E1
0
0
1
1
E2
0
1
0
1
A
1
0
0
0
Nei simboli O-NO entrambi gli imput sono rappresentati insieme con un
trattino sovraggiacente..
E1 E2 = A
simbolo grafico logico
Logik-Bildzeichen
E1
≥1
E2
A
diagramma
del circuito elettrico
Schaltbild
Elektrik
diagramma
gerarchico
Kontaktplan
E1
E2
A
diagramma del circuito pneumatico Schaltbild Pneumatik
A
E1
E2
A
Immagine 40:
88
O NO
E1
E2
Azionamenti elettrici e controlli automatici
2.4.7
Minos
Inibizione
L‘inibizione viene chiamata anche „inhibition gate“. I due segnali
d’ingresso vengono collegati così che in uscita c’è soltanto un segnale
se l’entrata E1 porta un segnale e l’entrata E2 no.
Questo viene raggiunto negando prima l’entrata E2 e collegando il risultato
tramite un collegamento E con l’entrata E1.
Tabella della verità:
E1
0
0
1
1
E2
0
1
0
1
A
0
0
1
0
La negazione dell’entrata E2 viene rappresentata con una linea sopra
il simbolo del segnale. Il collegamento delle due entrate si ottiene con i
simboli corrispondenti del collegamento E.
Die Negation des Eingangs E2 wird durch einen Strich darüber dargestellt.
Die Verknüpfung der beiden Eingänge erfolgt durch die entsprechenden
Symbole der UND-Verknüpfung.
E1 E2 = A
simbolo grafico logico
Logik-Bildzeichen
E1
&
E2
A
diagramma
del circuito elettrico
Schaltbild
Elektrik
diagramma
gerarchico
Kontaktplan
E1
A
Immagine 41:
A
diagramma del circuito pneumatico Schaltbild Pneumatik
E1
E2
E2
A
E2
E1
(Inibizione)
89
Azionamenti elettrici e controlli automatici
Minos
2.4.8
Implicazione
L’implicazione viene chiamata anche inhibition gate – negazione. Due
segnali in ingresso vengono legati in maniera tale che all’uscita non c‘è
il segnale soltanto se l’ingresso E1 porta un segnale e l’ingresso E2 non
lo porta.
ciò si ottiene negando prima l’entrata E2 e legando poi il risultato tramite
una disgiunzione all’ingresso E1.
Tabella della verità:
E1
0
0
1
1
E2
0
1
0
1
A
0
1
0
1
La negazione dell‘ ingresso E1 viene rappresentata con una linea sul
simbolo del segnale. Il collegamento degli due ingressi avviene tramite
i simboli corrispondenti alla disgiunzione.
E1 E2 = A
simbolo
grafico logico
Logik-Bildzeichen
E1
≥1
E2
A
diagramma
gerarchico
Kontaktplan
E1
A
E2
diagramma
del circuito elettrico
Schaltbild Elektrik
E1
diagramma del circuito pneumatico Schaltbild Pneumatik
E2
A
E1
A
Immagine 42:
90
Implicazione
E2
Azionamenti elettrici e controlli automatici
2.4.9
Minos
Equivalenza
Nel caso di equivalenza i due segnali d’entrata vengono collegati così
che c’è soltanto un segnale se le due entrate E1 e E2 hanno lo stesso
stato. All’uscita dunque c’è un segnale se tutt’è due entrate portano un
segnale o se tutt’è due entrate non portano un segnale.
Tabella della verità:
E1
0
0
1
1
E2
0
1
0
1
A
1
0
0
1
Per l’equivalenza non c’è un simbolo speciale. Il collegamento va messo
insieme dai singoli elementi.
simbolo
grafico logico
Logik-Bildzeichen
E1
=
E2
A
diagramma
del circuito elettrico
Schaltbild Elektrik
diagramma
„ladder“
Kontaktplan
E1
E2
E1
E2
A
diagramma del circuito pneumatico Schaltbild Pneumatik
A
E1
E1
E2
A
Immagine 43:
E2
Equivalenza
91
Azionamenti elettrici e controlli automatici
Minos
2.4.10 Antivalenza
¦
'
e due segnali in ingresso vengono legati in maniera tale che all’ingresso
c’è soltanto un segnale se uno solo dei due ingressi E1 o E2 portano un
segnale. Viceversa, con la disgiunzione all’uscita non c’è un segnale se
tutt’è due le entrate presentano un segnale.
Un collegamento di antivalenza si ottiene negando il risultato di un collegamento di equivalenza.
Tabella della verità:
E1
0
0
1
1
E2
0
1
0
1
A
0
1
1
0
Per l’ambivalenza non c’è un simbolo particolare. Il collegamento va
inserito insieme ai singoli elementi.
simbolo
grafico logico
Logik-Bildzeichen
E1
=
E2
A
diagramma
del circuito elettrico
Schaltbild Elektrik
diagramma
gerarchico
Kontaktplan
E1
E2
E1
E2
A
diagramma del circuito pneumatico Schaltbild Pneumatik
A
E1
E1
E2
A
Immagine 44:
92
Antivalenza
E2
Azionamenti elettrici e controlli automatici
Minos
2.4.11 Memoria
££
o „bistable element“. Si tratta di collegamenti elettronici che possono
assumere due stati stabili. Visto che questi stati non possono cambiare
aut vonomamente,viene normalmente memorizzato sempre l’ultimo stato.
~££>
&
%&££
gamenti elettronici.
££¤
¥"
\¤
¥"cella). Conformemente gli stati vengono rappresentati, rispettivamente,
]
££
'
££&
'>££
X'££
può essere accumulato un bit intero. Tali ambiti di accumulazione vengono
chiamati registri. A seconda il tipo del microprocessore sono possibili
diverse lunghezze di registrazione.
segnale
dominante
di reset
Setzsignal
dominant
E1
E2
S
R
A
E1 assegnazione
segnale
E1 Signal gesetzt
E2
Signal
gelöscht
E2 segnale cancellato
B
+
&
E2
E1
A
E2
1
A
E1
–
WX
93
Azionamenti elettrici e controlli automatici
Minos
'
££
££
££
digitale e la microelettronica, computer inclusi.
$
££
ogni singola cella (storage cell) contiene soltanto un condensatore e un
transistore.
Come nel caso dell’autotenuta dei circuiti di trasmissione (collegamenti di
accumulazione) i tipi si contraddistinguono secondo il segnale d’ingresso
dominante. Se c’è soltanto un segnale i due tipi non sono differenti.
Ci sono differenze fra i segnali di output soltanto se tutti e due i segnali
sono contemporanei. In un collegamento con segnale di attivazione dominante ci sarà un segnale d’uscita se ci sono tutti e due i segnali di input.
Se il collegamento invece è costituito da un un segnale (compensazione
del segnale) dominante, nel caso che ci sono i due segnali d’ingresso
non ci sarà un segnale d’uscita.
segnale
dominante
di reset
Löschsignal
dominant
E1
E2
R
S
E1 assegnazione
segnale
E1 Signal gesetzt
E2 segnale
cancellato
E2 Signal
gelöscht
A
B
+
1
E2
E1
&
A
–
WXcompensazione del segnale dominante
94
E2
E1
A
Azionamenti elettrici e controlli automatici
Minos
2.4.12 Algebra di commutazione
I collegamenti logici binari vengono descritti da una branca della matematica che viene chiamata algebra booleana. Nell’ambito del calcolo di
circuiti combinatori binari e apparecchiature si parla anche di algebra di
commutazione.
L‘algebra di commutazione si dedica alla descrizione dei collegamenti fra
gli stati degli interruttori nell’interno della commutazione delle disposizioni
Con l‘algebra di commutazione prima si calcolavano già i circuiti relè. Le
regole di calcolo però valgono anche per collegamenti di elementi elettronici. Un livello più alto corrisponde ad un relè acceso e con l’uno logico.
In seguito vengono inseriti i simboli logici per i collegamenti E ed O. Per
ricordare meglio: il collegamento E è una V capovolta (aperta sotto) e
il collegamento O è una V semplice (aperta sopra). Le prime lettere dei
collegamenti in tedesco sono quelle delle parole ‘unten’ (sotto) e ‘oben’
(sopra).
La legge di commutazione descrive le equazioni nelle quali sono presenti soltanto i collegamenti E ed O. In tale equazione le singole variabili
possono essere cambiati.
A
B
C =C
B
A
A B C =C B A
La legge associativa descrive le equazioni nelle quali c’è una parentesi
in più. Assomiglia però alla legge di commutazione.
A
(B
C = A
) (
B
)
C =A
B
C
A
(B
C = A
) (
B
)
C =A
B
C
Nella legge di distribuzione ci sono sia collegamenti logici di tipo E che
di tipo O. Gli elementi fuori dalle parentesi possono essere moltiplicati.
A
(B
C = A
) (
B
) (A
C
)
A
(B
C = A
) (
B
) (A
C
)
95
Minos
Azionamenti elettrici e controlli automatici
Con l’aiuto della legge di assorbimento, i collegamenti possono essere
A
(A
B =A
A
(A
B =A
A
A
)
)
(A B )= (A
(A B )= (A
B
)
B
)
La legge di negazione descrive il collegamento di una variabile con la
sua negazione. Anche in questo caso, i collegamenti possono essere
A
A =0
A
A =1
Le leggi di DeMorgan (dal nome del matematico omonimo) affermano
che la negazione comune di due variabili legate da un operatore logico è
uguale alle singole variabili negate singolarmente, legate da un operatore
logico cambiato (E invece di O e viceversa)
A
B =A
B
A
B =A
B
Inoltre risulta che una doppia negazione si annulla.
Hanno priorità, come anche nella matematica normale, i collegamenti
messi fra parentesi.
Compiti più complessi vengono rappresentati con l’aiuto di tabelle della
X
variabili d’ingresso in forma di tabella e con gli stati uno e zero. Gli approcci
­
Â
Dopo la trasformazione in una notazione di logica matematica, può essere
costruito uno schema circuitale. Anche per questo si usano le regole e
le leggi dell‘algebra combinatoria.
96
Azionamenti elettrici e controlli automatici
2.5
Minos
Programmazione di un controllore programmabile
Per programmare un controllore programmabile ogni produttore usa il
proprio software.
I linguaggi di programmazione sono gli stessi, però fra di loro ci possono
essere differenze per quanto riguarda le singole istruzioni.
La norma internazionale IEC 611 31 è stata introdotta per creare una base
per l‘univocità della programmazione di controllori programmabili. La IEC
61131-3, ha una parte dedicata ai linguaggi di programmazione ma è più
che altro una direttiva per la programmazione di controllori programmabili. Una norma unica per l‘uniformità dei linguaggi di programmazione
ha vantaggi sia per il produttore sia per l’utente. I produttori, in questo
modo, non devono sviluppare un loro software completamente nuovo,
che determinerebbe costi molto alti. Gli utenti inoltre possono imparare
ad usare più facilmente i diversi sistemi di programmazione essendo
questi costruiti in maniera simile.
2.5.1
Programmazione strutturata
In passato i programmi del controllore programmabile erano costruiti
in modo lineare. I comandi venivano indicati uno dopo l’altro nel
programma e svolti precisamente nell’ordine indicato.
Attualmente i programmi più complessi dovrebbero essere sviluppati
in maniera strutturata. Il programma viene suddiviso in più sottoprogrammi. Questi vengono chiamati anche pietra di costruzione del
programma.
La programmazione strutturata offre i seguenti vantaggi:
- I programmi vengono ben strutturati. Cambiamenti a posteriori nel
programma possono essere svolti più semplicemente. In tal senso,
- Parti del programma che vengono usate più volte devono essere
scritte soltanto una volta. Se necessario, l’elemento viene richiama
insieme.
- Programmi parziali che durante lo svolgimento complessivo del programma non sono necessari, possono essere saltati, abbreviando
in modo sostanziale il tempo del ciclo.
- I produttori dei controllori programmabili spesso forniscono anche
programmi parzialmente prerealizzati. Alcune funzioni come l’avvio
del controllore o elementi per il trattamento errori possono essere
introdotti in maniera semplice nel programma dall’utente.
97
Azionamenti elettrici e controlli automatici
Minos
Usando tali elementi è da notare che le uscite nel programma quasi sempre vengono inserite un‘unica volta. Lo scambio di informazioni tramite i
£"
\
>
elementi di organizzazione. Dal programma principale i singoli elementi
funzionali o funzioni vengono richiamate. L‘avvio può essere assoluto,
ciòe accadere sempre, o limitato e dunque svolgersi soltanto quando si
Le funzioni, in questo caso, non hanno una memoria. Se vengono avviate con un valore determinato forniscono sempre lo stesso risultato. Dei
blocchi di funzione, invece, possono contenere contatori o moduli timer
permanenti. In relazione agli stati di queste variabili interne, il risultato di
un blocco di funzioni, nonostante le variabili in ingresso siano le stesse,
può non essere lo stesso.
Nei moduli del programma possono essere archiviati anche dati. Questi
dati possono essere richiamati durante lo svolgimento del programma,
o memorizzati.
O B1
FB1
BA FB1
FB3
BA FB3
BE
FB2
BA FB2
BE
BE
Immagine 47:
98
Programmazione strutturata
BE
Azionamenti elettrici e controlli automatici
2.5.2
Minos
Dichiarazione di variabili
Le entrate e uscite di un controllore programmabile vengono denominate
con lettere e cifre. Viene usata la lettera E per gli ingressi e la lettera
A per le uscite. Nei sistemi di programmazione inglesi invece vengono
usate le lettere I per Input e O per Output. Queste lettere ormai si usano
anche nei sistemi tedeschi di programmazione.
Le singole entrate vengono denominate con due cifre che sono separate
con un punto. La prima cifra indica il gruppo mentre la seconda cifra da 0
ª
¦&
entrate. Questi gruppi sono a otto perché un bit consiste di otto singoli bit.
Le uscite vengono denominate seguendo lo stesso principio. Per entrate e
uscite possono essere usati gli stessi numeri. Nelle entrate e nelle uscite
invece ogni numero può essere presente soltanto una volta.
Esempio
Entrate:
Uscite:
E0.0, E0.1, E0.2, E0.3, ... E0.7, E1.0, E1.1, ...
A0.0, A0.1, A0.2, A0.3, ... A0.7, A1.0, A1.1, ...
In nuovi sistemi di programmazione accanto alla programmazione
orientata in byte è possibile anche un’assegnazione cosiddertta „word
oriented“ (orientata alle parole) degli indirizzi di entrata e uscita. Visto
che una parola contiene due byte, in ogni gruppo ci possono essere 16
singole entrate o uscite. Le denominazioni in questo caso p.es. vanno
<[[<[;_
Per non usare nel programma soltanto queste denominazioni di indirizzo, questi possono essere sostituiti con indirizzi simbolici. Se l’ingresso
E0.0. è collegato con un interruttore l’ingresso p.es. può essere denomi]
<[[
]
gramma. Questa parte viene denominata modulo di dichiarazione.
Nel modulo di dichiarazione viene stabilito, inoltre, di quanti bit consiste
una variabile. Un unico ingresso, come l‘interuttore di avvio, può essere
soltanto acceso o spento. Per effettuaare tale funzione c’è bisogno di un
bit e la variabile viene indicata con il tipo BOOL. Se le variabili consistono
>
§©<¿¦
Le variabili globali valgono per tutto il programma. Altre variabili, invece,
valgono soltanto per il sottoprogramma a cui si riferiscono.
99
Minos
Azionamenti elettrici e controlli automatici
£
(indicatori). Questi vengono numerati in modo analogo ai primi ma si
distinguono da essi per la denominazione con la lettera M.
I marker memorizzano i risultati dei collegamenti e possono richiamare
questi risultati in o da sottoprogrammi.
I marker vengono chiamati „remanenti“, perché rimangono nel loro stato
anche se manca la tensione.
2.5.3
Istuzioni
La più piccola unità del programma è l‘istruzione. Si tratta di una parte
operante che contiene la variabile.
Gli ordini possono essere diversi nei sistemi di programmazione forniti
da diversi produttori. Ordini importanti sono:
<
$<¿
anche come funzione di carico
O
funzione E per il collegamento di bit e byte e Word
....
mettere accumulatori
…
rimettere di accumulatori
=
assegnazione del risultato di un collegamento
il contenuto della parentesi e soltanto dopo il risultato viene integrato nel
calcolo successivo.
Anche per ordini di contare e ordini di tempo sono previste diverse
operazioni. Alcune operazioni trasferiscono i dati in diversi elenchi di
calcolo, spostano singoli bit o tutti i bit di un byte e eseguono operazioni
di comparazione.
I singoli elementi possono essere richiamati, come accade con operazioni
per salti assoluti e limitati. I salti assoluti vengono eseguiti sempre, mentre
La rappresentazione delle singoli indicazioni viene eseguita in diversi
linguaggi di programmazione. A seconda della modalità del compito di
comando, le singolo lingue di programmazione sono più o meno adatte
per la redazione di un programma. Alcuni linguaggi di programmazione
100
Azionamenti elettrici e controlli automatici
2.5.4
Minos
Set di istruzioni
Il set di istruzioni è una lingua di programmazione adatta a impianti, che
sono a disposizione in quasi tutti i sistemi di programmazione. Tuttavia
non tutti i set di istruzioni nei differenti linguaggi, sono conformi alla IEC
61131-3, anche se dal produttore del controllore programmabile vengono
denominati come tali. Per tale motivo spesso non è possibile trasmettere
un programma scritto in un set di istruzioni da un produttore in un sistema
di programmazione di un altro produttore.
Con l’aiuto del set di istruzioni, soprattutto le entrate e le uscite del controllore programmabile, vengono collegate in maniera logica. In ogni riga
vengono inseriti sia la operazione che l’operatore.
Inoltre, in ogni riga ci dovrebbe essere un commento in cui viene spiegata
l’operazione. Questo facilita le successive letture e la comprensione del
programma. Il commento viene messo fra parentesi con un asterisco.
Il sistema di programmazione ignora questi commenti e viene caricato
soltanto il codice del programma nel controllore programmabile.
Esempio
Esempio
Una luce di segnalazione all’uscita del controllore programmabile deve essere accesa se due tasti sono azionati contemporaneamente o se è acceso uno switch di controllo. Il programma nel ….
set di istruzioni potrebbe avere il seguente corpo:
U
U
O
=
E0.0
E0.1
E0.2
A0.0
(*Tasto 1*)
(*Tasto 2*)
(*….. (control switch)*)
(* …..(signal lamp)*)
In ogni riga c’è prima la operazione e poi segue l‘operatore. Il commento
si trova sempre sul lato destro di una riga. Le prime due entrate sono
collegate E. Dopo segue il collegamento O con il terzo ingresso. Il segno
di uguaglianza indica che il risultato del collegamento logico è il risultato
all’uscita.
Il set di istruzioni assomiglia alla linguaggio di assemblaggio che serve
per programmare il computer. Tali strutture sono possibili soltanto in
maniera abbastanza macchinosa con ordini di salto (banch instruction).
Il vantaggio del set di istruzioni consiste nel fatto che il codice del programma può essere abbreviato. Ciò è importante soprattutto se si tratta
di in controllore programmabile con una memoriadi piccole dimensioni.
Il set di istruzioni, di solito, viene usato soltanto da programmatori esperti.
Utenti con meno esperienza preferiscono usare linguaggi di programmazione con la visualizzazione che consentono una migliore comprensione
del programma.
101
Azionamenti elettrici e controlli automatici
Minos
2.5.5
Diagramma gerarchico
"\
miglia a schemi elettrici con comandi a rélé orecedentemente visti. Le singoli parti del programma
vengono suddivise in sezioni che vengono chiamati reti.
~
X
possono essere rappresentati anche con la tastiera di una macchina da scrivere. La rappresentazione dei simboli era possibile anche su schermi che portavano visualizzatori di solo testo.
Inoltre il ladder diagram assomiglia alla rappresentazione americana di un collegamento a relè nella
quale i percorsi di corrente sono sistemati in orizzontale.
Per la conformità con uno schema elettrico europeo, nella rappresentazione di un diagramma gerarchico (ladder diagram), lo schema elettrico va girato di 90º in senso oriario. In seguito lo schema
elettrico va allineato a una linea verticale e i simboli vanno adattati.
Il ladder diagram è adatto soprattutto per elettricisti visto che la rappresentazione somiglia molto
a schemi elettrici con relè. Il ladder diagram viene usato anche per rappresentare i comandi di
connessione
– S1
–S2
–S3
–S4
–S5
Immagine 48:
102
Esempio di un ladder diagram o diagramma gerarchico
– K1
Azionamenti elettrici e controlli automatici
2.5.6.
Minos
Diagramma delle funzioni a blocchi
Anche il diagramma a blocchi delle funzioni è una rappresentazione gra
$
booleane, funzioni aritmetiche e altre.
Come nel ladder diagram, le singole parti del programma vengono suddivisi in reti. Nel caso di collegamenti di Bool le singoli reti possono essere
trasformate nel ladder diagram, o nel diagramma a blocchi delle funzioni..
¬$
rettangoli che vengono legati tramite linee orizzontali e verticali. Le uscite
dei rettangoli non possono essere semplicemente collegatema vanno
sempre ricollegati come ingressi di un altro rettangolo.
Il risultato del collegamento viene fatto uscire in alto a destra. In ogni
rete può essere calcolato soltanto un risultato che può essere dato però
in diverse uscite simultaneamente.
il diagramma a blocchi delle funzioni viene usato soprattutto da persone
poco familiari con la programmazione. Come nel caso del ladder diagram,
l’uso è di vantaggio soprattutto per sistemi di controllo logico.
–S 1
–S 2
&
–S 3
–S 4
&
>=1
–S 5
Immagine 49:
=
–K1
Esempio di un diagramma a blocchi delle funzioni
103
Minos
2.5.7
Azionamenti elettrici e controlli automatici
Diagramma sequenziale delle funzioni
Anche il diagramma sequenziale delle funzioni (sequential function chart)
²
controllo sequenziale per l‘esecuzione dei fermi macchina
Le singoli parti nel diagramma sequenziale delle funzioni vengono chiamate passi. Tra i passi sono contemplati anche transistori che vengono
chiamati anche „step amabling“. Soltanto se unoperazione è già stata
realizzata , è possibile procedere con il passo successivo
Per ogni passo c’è un‘azione che viene eseguita in esso. Inoltre c’è una
condizione che deve essere realizzata per poter eseguire ogni passo.
$$
E‘ possibile dividere il percorso in diverse catene. che possono essere
elaborate contemporaneamenteo singolarmente a seconda delle condizioni in ingresso.
Start
- S1
- S2
- S3
&
1N1
N
Mot or A n
- K1
Ende
Immagine 50:
104
Esempio di un diagramma sequenziale delle funzioni
Azionamenti elettrici e controlli automatici
2.5.8
Minos
Testo strutturato
Il testo strutturato è un linguaggio di programmazione di livello più alto
ed è paragonabile con il linguaggio di programmazione PASCAL. Attraverso dei set di istruzioni possono essere realizzati più agevolemente
dei compiti di comando con calcoli complessi.
spesso integrato con ordini non attinenti strettamente alle macchine (set
di istruzioni).
Il vantaggio del testo strutturatorispetto all‘AWL è che compiti di programmazione possono essere espressi in maniera molto compatta. La struttura
del programma grazie all’uso di blocchi di istruzioni è molto chiara.
Naturalmente ci sono anche degli svantaggi. Il codice delle macchine
deve esserere realizzato con l‘ausilio di un compilatore. Programmi che
vengono elaborati con linguaggi differenti. perciò, di solito sono più lenti.
$
Un programma in testo strutturato consiste di più istruzioni. Le istruzioni
sono separate con un punto e virgola. Al contrario in un set di istruzioni
gli ordini possono essere lunghi più righe. Ma è anche possibile che in
una riga ci siano più indicazioni.
I commenti sono indicati con parentesi e asterisco. Essi non devono
dove sono presenti spazi vuoti e quindi anche all‘interno di un ordine.
L’assegnazione nel testo strutturato si concretizza nel simbolo „due punti“
seguito dal segno di uguaglianza. Nel caso di un’assegnazione, il valore
dell’ordine alla destra del segno di uguaglianza viene trasmesso alla va
Ï
IF, in quanto l‘istruzione di saltonon è presente nel testo strutturato.
A: = B+C (*addizione dei valori B e C)
Esempio
Nell’esempio vengono sommati i due valori B e C e la somma attribuita
chiusa con punto e virgola.
105
Minos
2.5.9
Azionamenti elettrici e controlli automatici
Temporizzatori
I temporizzatori vengono chiamati anche timer. Vengono usati per realizzare dei ritardi nel programma. Corrispondono ai relè a
tempo nel comando a relè. È da osservare che il tempo di
ciclo del controllore programmabile deve essere molto più
basso del tempo regolato con il temporizzatore.
A seconda del compito di comando vengono usati diversi temporiz>
inserzione o con ritardo di disinserzione. Inoltre esistono
temporizzatori per prolungare o abbreviare un impulso
all‘ingresso.
Nel diagramma funzionale a blocchi la programmazione di un temporizzatore e ben visibile. Sopra il modulo si trova la denominazione del temporizzatore. e la sua tipologia
I collegamenti del temporizzatore idi seguito citati devono essere sempre cablati:
IN condizioni di avvio, avvia il temporizzatore
PT costante di tempo, durata,
Q uscita, termine dell‘operazione
I seguenti collegamenti possono essere cablati se la funzione è necessaria:
ST Fermo, ferma il temporizzatore senza riportarlo allo stato iniziale,
ET riporta il valore del tempo rimasto.
T1
SE
Immagine 51:
106
E0.0
IN
T#1s
PT
E0. 1
ST
E0. 2
R
ET
Q
M0
A1.0
Timer in un diagramma funzionale a blocchi
Azionamenti elettrici e controlli automatici
Minos
2.5.10 Numeratore
I numeratori o contattori vengono usati p.es. per contare il numero di cicli
eseguiti o per contare la quantità di pezzi prodotti. Possono elaborare
soltanto numeri interi e positivi, incluso lo zero.
A seconda del compito di comando, vengono usati diversi tipi di numeratori. I contattori all’indietro partono da un valore assegnato, dal quale
iziare o meno dallo zero. Il loro risultato viene paragonato con il numero
da raggiungere. Inoltre esistono dei contattori combinati che possono
contare sia all’indietro, sia in avanti.
Nello speak function block diagram è ben evidenziata la programmazione
di un contattore. Sopra il modulo si trova la denominazione e la tipologia
del contattore
{
CD
impulso di conteggio, il numeratore conta sempre uno, se c’è un
impulso
PV
valore di conteggio, il valoredi partenza del contatore all’indietro
LD
valore di conteggio eseguito quando l’ingresso èdato
'²
&
Q
uscita posta per il contattore all’indietro, quando è stato raggiunto
il valore zero.
Z1
ZR
Immagine 52:
E1. 0
CD
75
PV
E1.1
LD
E1. 2
R
CV
Q
M2
A2. 0
Contattore all’indietro
107
Azionamenti elettrici e controlli automatici
Minos
2.5.11 Accumulatori
¬££]
segnali esistenti per un breve arco di tempo devono agire per una durata
più lunga. Essendo il loro stato accesso o spento automaticamente, tali
dispositivi sono denominati anche bistabili.
Collegando un segnale all’ingresso S viene acceso l’accumulatore e
all’uscita viene fatto uscire un segnale. La cancellazione avviene tramite
#
$
dell‘accumulatore.
Una differenzasi evidenzia solo collegando i due ingressi contemporaneamente con un segnale. L’accumulatore con il primo set, in questo
caso, emette un segnale d’uscita. L’accumulatore con la funzione il primo
reset in uscita, però,non fa uscire un segnale, se tutt’e due gli ingressi
non sono stati innescati nello stesso momento.
La funzione degli accumulatori corrisponde dunque a quella dei circuiti
a relè con autotenuta con funzioni ACCESO dominante e SPENTO dominante.
vorrangiges Setzen
vorrangiges Rücksetzen
SR
RS
E0.0
S1
E0. 1
R
Q1
A0.0
FUNCTION_BLOCK S R
V AR_INPUT
S1 : BOOL;
R : BOOL;
E ND_VAR
V AR_OUTPUT
Q1 : BOOL;
E ND_VAR
Q1 :=
S1 O R (NOT
E ND_FUNCTION_BLOCK
Immagine 53:
108
R AND Q1);
E 1.0
S
E 1. 1
R1
Q1
A1.0
FUNCTION_BLOCK RS
V AR_INPUT
S : BOOL;
R1 : BOOL;
E ND_VAR
V AR_OUTPUT
Q1 : BOOL;
E ND_VAR
Q1 := NOT
R1 AND ( S O R Q1);
E ND_FUNCTION_BLOCK
Accumulatore nel diagramma funzionale a blocchi e testo strutturato
Azionamenti elettrici e controlli automatici
Minos
2.5.12 Diagramma funzionale sequenziale
Il controllo sequenziale si programma in modo molto chiaro con diagrammi funzionali sequenziali. Per questo il linguaggio di programmazione
sequenziale è molto adatto. Una valida soluzione alternativa è l‘utilizzo
prevalente di accumulatori prevalentemente (reset).
Per ogni passo occorre prevedere un accumulatore. Il primo passo p.es.
può essere stabilito tramite un interruttore e una condizione di avvio.
Il passo successivo viene eseguito solo se la condizione precedente
'&
ne dell‘indicatore del passo precedente Una volta azionato il secondo
accumulatore,il primo passo viene simultaneamente cancellato.
Gli indicatori in un‘altra parte del programma devono essere legati in
maniera logica e usati per i segnali in uscita.
A seconda delle funzioni, in questo modo,i singoli passi vengono eseguiti
uno dopo l’altro. Questo modo di procedere corrisponde a una sequenza
cancellante nella tecnica del relè.
M1
RS
–S1
– B1
&
M0.2
S
R1
Q1
M0. 1
Q1
M0.2
M2
RS
M0. 1
– B2
&
M0. 3
S
R1
:
:
:
Immagine 54:
Diagramma funzionale sequenziale in blocchi di funzioni
109
Minos
110
Azionamenti elettrici e controlli automatici
Azionamenti elettrici e controlli automatici
3
Propulsioni elettriche
3.1
Introduzione
Minos
In vari ambiti tecnologici è necessaria l‘energia elettrica, normalmente
prodotta con l‘ausilio di macchine elettriche che a loro volta richiedono
l‘energia per i loro pannelli di comando.
Le macchine elettriche sono suddivide in generatori e motori. I generatori
trasformano l‘ energia elettrica. L’energie elettrica con l’aiuto dei motori
viene nuovamente trasformata in energia meccanica. Questi motori perciò
vengono chiamati anche propulsioni.
La maggior parte delle macchine elettriche lavora con movimento rotante.
I motori che creano un movimento traslatorio vengono chiamati motori
lineari. Un esempio conosciuto di questo tipo di motori è la propulsione
del treno transrapid.
Le dimensioni delle macchine elettriche vanno da motori con pochi mil
tonnellate.
I più piccoli motori hanno un rendimento di circa un milliwatt. I generatori
più grandi invece producono una potenza elettrica di oltre mille megawatt.
|[[[;¿;[[[
000 000 W.
La trasmissione e la distribuzione dell’energia elettrica avviene tramite
reti in tensione. Per distanze grandi vengono usate reti ad alta tensione.
Tramite reti a media e bassa tensione i singoli clienti vengono collegati
a reti ad alta tensione.
Un grande vantaggio della tensione alternata, che viene usata nella
maggior parte dei casi, è che può essere trasformata con trasformatori
in alti valori di tensione. In corrispondenza delle macchine elettriche, i
trasformatori hanno una potenza paragonabile a quella delle macchine
elettriche.
Per un collegamento punto a punto viene anche utilizzata una trasmissione di corrente continua con alta tensione, che,tecnicamente, è
più dispendiosa di una trasmissione con tensione alternata sebbene le
perdite su grandi distanze siano più basse, come accade ad es. da un
continente all’altro.
111
Minos
Azionamenti elettrici e controlli automatici
3.2
Campi elettrici e magnetici
3.2.1
Il campo magnetico
Le tensioni elettriche vengono suddivise in tensioni positive e negative.
Gli elettroni sono caricati negativamente e i nuclei dell‘atomo in maniera
positiva.
£$
segno si respingono e tensioni opposte si attraggono. Le forze risultanti
sono quindi positive, se le tensioni si respingono ovvero le tensioni in
oggetto sono entrambe positive o negative.
]
$
no delle forze. Le linee di forza elettrica, più in particolare, attraverseranno
il centro della sfera (linee sono le linee di forza del campo elettrico).
$
gativa, dunque dal più al meno. Le linee di forza perciò escono da una
tensione positiva e entrano in una tensione negativa.
+
+
–
–
–
–
+
–
–
–
–
+
Figura 55:
112
Linee di forza di un campo elettrico
+
Azionamenti elettrici e controlli automatici
Minos
Nel caso di un campo elettrico omogeno tutte le linee di forza elettrica sono
parallele. Un esempio è il caso di due piastre con la stessa grandezza
con cariche opposte. I campi elettrici nelle macchine invece spesso non
sono omogenei.
Se le linee di forza elettrica si trovano più vicine, il campo elettrico è più
forte.L‘unità di misura per la potenza del campo elettrico più utilizzato è
il Volt/Metro (V/m).
Il numero della cariche di un corpo conduttore in rapporto alla sua su
X
]
vengono spostate in direzione delle linee di forza elettrica si parla di
X£
X
Anche intorno ad un conduttore elettrico nasce un campo elettrico, se
il conduttore trasmette le tensioni. Insieme all‘isolamento, il conduttore
ha una capacità propria. Contrariamente ai condensatori, nel caso di
conduttori elettrici, questa capacità di solito non è auspicabile.
Se un condensatore viene collegato ad una tensione alternata sinusoidale
anche il condensatore subisce una variazione di tensione. La tensione
cambia in maniera più veloce, se la curva sinusoidale ha il suo passaggio
£
Nei punti di intersezione della curva sinusoidale la tensione non cambia.
Perciò in tali istanti non c’e corrente. Ne segue che la tensione nel condensatore anticipa la corrente di 90º.
Lo sfasamento temporale di tensione e corrente viene chiamato anche
ritardo di fase. Visto che la tensione raccoglie valori sia positivi che negativi, la corrente viene emessa o ritorna al condensatore. In tal modo
il condensatore dalla rete prende una potenza e la riemette poco dopo.
Durante uno spostamento di fase di 90 º la potenza raccolta è grande
quanto quella fornita. L‘oscillazione di potenza viene chiamata potenza
reattiva.
……….
……….
In ogni campo elettrico viene accumulata energia elettrica che viene
usata nei condensatori. La quantità di energia dipende dalla tensione
e dalla capacità del condensatore. Queste quantità di energia però non
sono sempre così grandi da poter essere usate in ambito tecnologico.
113
Minos
3.2.2
Azionamenti elettrici e controlli automatici
Il campo magnetico
Il magnetismo è causato dal movimenti degli elettroni. Con il loro movimenti intorno al nucleo dell’atomo si creata una forza magnetica. In
questo caso materiali diversi producono effetti differenti sui campi magnetici esterni.
I materiali cosiddetti paramagnetici se portati all‘interno di un campo magnetico tendono ad aumentarne l‘intensità. Fanno parte di questi materiali
ad es. alluminio e tanti materiali elettrici isolanti.
Al contrario i materiali diamagnetici indeboliscono l‘intensità dei campi
magnetici, in cui vengono inseriti. Materiali diamagnetici sono ad es.
rame, argento e oro.
Materiali come ferro, nichel e cobalto sono ferromagnetici. Se questi
materiali vengono inseriti in un campo magnetico, l‘intensità del campo
aumenta fortemente.Inoltre l‘intensità del campo magnetico si concentra
intorno al materiale in oggetto. Per tale motivo essi sono molto utilizzati
nelle macchine elettriche.
I materiali ferrimagnetici si comportano in maniera analoga, pur producen
Fanno parte dei materiali ferrimagnetici il diossido di cromo e la ferrite.
Se un conduttore elettrico viene attraversato da corrente, intorno al conduttore si forma un campo magnetico. Il campo magnetico in questo caso
ha la forma di anelli concentrici. La direzione delle linee di forza elettrica
risulta dalla regola di Maxwell. Se si inserisce una vite la direzione in
cui viene girata indica la direzione delle linee di forza elettrica, mentre il
movimento lineare indica la direzione della corrente.
Due conduttori paralleli attraversati da corrente nella la stessa direzione,
si attraggono. Se la corrente invece va in direzioni opposte, i due conduttori si scostano.
Più spire collegate in serie formano una bobina. Le linee di forza delle
singole spire vengono sommate e creano un elettromagnete se la bobina
viene attraversata da corrente.
Il punto dove escono le linee di forza elettrica dalla bobina viene chiamato anche polo nord. Visto che nelle spire della bobina, posizionate una
accanto l’altra, la corrente va nella stessa direzione, le singole spire si
attirano e tengono insieme la bobina.
Le bobine sono un elemento importante dei motori elettrici e dei trasformatori. L’effetto magnetico dipende per esse dall’intensità della corrente e dal
numero di giri. Dal prodotto di questi due valori deriva la coppia motrice.
114
Azionamenti elettrici e controlli automatici
Minos
La forza magnetica del campo aumenta con la grandezza dell’inondazione
e se la misura della bobina, è dunque delle linee di forza elettrica, è
piccola.
~
X£
caso di bobine magnetiche con nucleo di ferro il valore si riconosce nella
linea caratteristica di magnetizzazione che varia secondo il materiale.
Con i materiali che vengono usati nelle macchine elettriche e nei trasformatori nel caso di una certa potenza del campo magnetico si raggiunge
X£
una volta raggiunto il valore massimo del campo magnetico.
]
X£
£
&
£
$
%&
£
catenato magnetico.
I
Immagine 56: Linee di forza elettrica di un campo magnetico
115
Minos
3.2.3
Azionamenti elettrici e controlli automatici
Induzione
Se una corrente attraversa un conduttore elettrico, intorno al conduttore si sviluppa un campo magnetico. Se questo conduttore si trova in
£]
corrente corre verticalmente al campo magnetico esterno sul conduttore
viene esercitata una forza. Questa forza agisce in maniera verticale sul
conduttore e viene chiamata forza di Lorenz.
La direzione dell’effetto può essere calcolata con la mano sinistra. Se si
tiene la mano sinistra aperta tale che le linee del campo magnetico arri
£
corrente, il pollice indica la direzione della forza di Lorenz. Questa regola
viene chiamata anche regola del motore, perché mediante la corrente
elettrica viene creato un movimento.
In una bobina, più conduttori sono collegati in serie. Così la … (cooper
tube) si moltiplica. Tale fenomeno viene sfruttato soprattutto dai motori.
Anche nei tubi catodici un raggio di elettroni viene spostato tramite il
campo magnetico delle bobine. In questo caso non c’èun conduttore
elettrico ma è il soil movimento degli elettroni nel campo magnetico che
determina la nascita della forza di Lorenz.
Se al contrario un conduttore viene spostato in un campo magnetico
nel conduttore nasce una tensione. Questo processo viene chiamato
induzione. Se si collegano le due estremità del conduttore, le differenze
di tensione si abbassano e nasce una corrente.
Anche la corrente generata dall‘induzione sviluppa un campo magnetico.
Questo è diretto in maniera tale che il movimento del conduttore viene
intralciato. Perciò un forza deve agire dall‘esterno sul conduttore per poter
compiere il movimento. Questo principio viene usato in un generatore
nel quale con una propulsione dall‘esterno viene creata una tensione a
causa della quale si genera una corrente.
%
destra. Se si tiene la mano destra aperta in maniera tale che le linee
del campo magnetico arrivino direttamente sull’interno della mano e il
pollice proteso indica la direzione del movimento anche le dita indicano
la direzione della corrente. Questa regola viene chiamata anche regola
del generatore.
Con la giunzione dei conduttori alle a bobine, la tensione indotta può essere aumentata. In particolare la tensione aumenta col numero delle spire
£
che può essere cambiato anche con il numero di giri del generatore.
116
Azionamenti elettrici e controlli automatici
Minos
Se nella bobina si trova un cuore di ferro massiccio, in esso vengono indotte correnti se la bobina viene attraversata da correnti parasite. Queste
correnti vengono chiamati anche vortici di corrente (correnti parassite o
di Focault).
Visto che il ferro conduce bene la corrente i, le correnti parassite possono causare un forte riscaldamento del nucleo di ferro. Per evitare tale
$
'
rassite deboli.
Se a una bobina viene applicata una tensione continua, si crea un campo
magnetico. In particolare, nella bobina viene indotta una tensione che fa
aumentare la corrente lentamente. Questa tensione di autoinduzione si
£
Anche se si disattiva la tensione continua di alimentazione, a causa
dell‘autoinduzione viene creata una tensione con la stessa direzione
della corrente originale. Questa tensione potrebbe essere così alta da
generare archi elettrici al contatto con l‘interruttore e a causa di ciò, i
contatti potrebbero essere danneggiati.
Per evitare questo fenomeno, in parallelo alla bobina viene inserito un
£
normale funzionamento ma se viene sospesa la corrente, lascia passare
la corrente generata dall‘autoinduzione. La corrente che attraversa la
bobina, in questo caso, diminuisce lentamente e vengono evitati danni
ai contatti dell’interruttore.
Le bobine vengono chiamate anche induttori. Con questa denominazione
viene indicata anche la grandezza della capacità della bobina di indurre
una tensione.
]
£
rente viene ostacolato da una resistenza causata dall’induzione. Perciò la
corrente raggiunge il suo valore massimo successivamente alla tensione.
Questo sfasamento, come nel caso del condensatore, ha un valore di
90º. sebbene in questo caso sia la tensione ad anticipare la corrente.
La resistenza reattiva di una bobina viene chiamata resistenza reattiva
induttiva.
Come nel caso del campo elettrico anche un campo magnetico immagazzina energia. La quantità di energia dipende dall’induttività della bobina
e dalla corrente che attraversa la bobina.
117
Minos
Azionamenti elettrici e controlli automatici
3.3
Le basi della fornitura di energia elettrica
3.3.1
Produzione di corrente
Con la parola produzione di corrente si descrive la trasformazione di altre
forme di energia in energia elettrica. Una produzione diretta di energia
non è possibile.
Visto che l’immagazzinamento di energia elettrica grandi quantità non è
possibile, la corrente elettrica deve essere prodotta sempre nel momento
in cui viene usata.
In Germania la maggior parte dell‘ energia elettrica viene prodotta in
impianti a carbone e in centrali nucleari. Questi due sistemi hanno in comune che, tramite calore, da acqua si ottiene vapore caldissimocon cui
vengono mosse delle turbine che sono collegate a generatori di corrente.
che a loro volta producono energia elettrica.
La produzione di grandi quantità di vapore non può essere alterata velocemente. Per questo le centrali in cui il vapore viene creato bruciando
carbone vengono usate come sistemi di medio carico. Le centrali nucleari
lavorano come centrali di base, visto che la fase di ricarica è molto più
complicata.
Le centraliche sfruttano turbine a gas hanno soltanto un breve tempo di
avvio e vengono usati in un intervallo di medio carico o sistemi di picco
di carico. In questi casi rotore fa lavorare il generatore.
Fanno parte dei produttori di energie rigenerative le centrali idroelettriche
e le centrali ad energia eolica. In questo caso una turbina o le pale di un
rotore muovono un generatore.
Le centrali solari lavorano senza un generatore conil fotovoltaico. Nelle
cellule solari l‘ energia elettrica viene prodotta direttamente dalla luce. L
e centrali solari termiche invece producono vapore con il quale vengono
fatti lavorate turbine e generatori.
Un‘altra possibilità di produrre energia elettrica senza l’uso di un generatore consiste nelle „celle a combustibile“. In esse idrogeno e ossigeno
vengono fatti reagire producendo acquacon generazione di energia elettrica. Tali dispositivi non sono ancora usati per produrre quantità grandi
di corrente.
L’immagazzinamento di energia elettrica viene realizzato soprattutto con
£
viene usata per trasportare altra energia in vasche situatead una certa
altezza. Nelle ore di punta viene creata nuovamente energia con l’acqua
tramite le turbine.
118
Azionamenti elettrici e controlli automatici
3.3.2
Minos
Trasporto di corrente e distribuzione
La distribuzione della corrente prodotta nelle centrali elettriche avvienecon reti per la trasmissione. Queste– se si tratta di tensioni al di sopra di
1000 V -vengono chiamate reti ad alta tensione con corrente trifase. Tali
reti usano tensioni di 110 kV, 220 kV e 380 kV. Le tensioni oltre 220 kV
vengono chiamati altissime tensioni.
Le reti con 220 kV e 380 kV trasmettono l’energia elettrica superando
grande distanze. Le centrali grandi sono collegati alla rete elettrica a 380
kV. Queste reti quasi sempre sono realizzate come reti di linee aeree.
le reti monofase dei treni non lavorano con corrente trifase e conduttori
con tensione altissima. La trasmissione di tensione continua è più impegnativa ma per grandi distanze le perdite di potenza sono più basse
visto che non c’è una resistenza reattiva.
Vengono denominati reti a media tensione quelle che distribuiscono 10
kV, 20 kV o 30 kV. Sono collegate tramite trasformatori sia con la rete
ad alta tensione che con la rete a bassa tensione.
I grandi consumatori sono collegati direttamente alla rete a media ten
cavi sotto terra. Fuori delle città vengono preferite reti aeree, mentre nelle
città vengono usati prevalentemente cavi.
La distribuzione ai singoli piccoli consuatori avviene con la rete a bassa
tensione a 400 V/230 V, tramite reti aeree e cavi sotterranei.
questi ultimi sono meno sottoposti a fattori di disturbo, hanno meno bisogno di spazio e determinano un minore impatto sul paesaggio.Tuttavia
i costi del fusibile, a causa dei lavori sotto terra, sono maggiori. Come
materiale per il conduttore può essere usato sia alluminio che rame.
Il collegamento alla rete di distribuzione con il consumatore di energia
avviene con l’allacciamento domestico. Nel box di servizio si trovano
anche fusibili per i singoli conduttori.
119
Azionamenti elettrici e controlli automatici
Minos
3.4
Trasformatori
3.4.1
Il trasformatore ideale
Un trasformatore nel maggior numero dei casi consiste di due bobine che
non sono collegati fra di loro elettricamente. L’accoppiamento delle bobine
avviene tramite un campo magnetico. Il nucleo di ferro del trasformatore
£
Nel caso di un trasformatore ideale non ci sono perdite, il rendimento è
del 100 %. Un trasformatore reale, al cui avvolgimento iniziale non è stato
collegata alcuna resistenza, assomiglia ad un trasformatore ideale. Più
$
$
Con un trasformatore possono essere trasmesse tensioni, amperaggi,
resistenze, capacità e induttività.
Le tensioni nel caso di un trasformatore ideale si comportano come i
numeri delle spire.
ü
U1
U2
N1
N2
rapporto di moltiplicazione
tensione d’ingresso
tensione d’uscita
numero di spire al lato d’ingresso /numero di di spire al lato d‘uscita
num
ü = U1 / U2 = N1 / N2
I1
I2
N
N2
amperaggio del lato d’ingresso
amperaggio al lato d‘uscita
numero degli spiri del lato d’ingresso
numero degli spiri del lato d‘uscita
ü = I1 / I2 = N2 / N1
Le tensioni nel caso di un trasformatore ideale si comportano come i l
numero delle spire.
Esempio
Esempio Un trasformatore considerato ideale ha il seguente numero
di avvolgimenti: sul lato d’ingresso di 200 e sul lato d’uscita di 800. La
tensione sul lato d’ingresso è di 48 V. Quanto è alta la tensione sul lato
d’uscita? Quanto è alta la tensione sul lato d’ingresso, se al lato d’uscita
corre una corrente di 2A?
tensioni:
U1 / U2 = N1 / N2
48 V / U2 = 200 / 800
U2 = 192
La tensione iniziale è di 192 V.
120
Azionamenti elettrici e controlli automatici
Minos
amperaggi:
I1 / I2 = N2 / N1
I1 / 2 A = 800 / 200
I1 = 8 A
L‘amperaggio sul lato d‘ingresso è di 8 A.
Le resistenze collegate trasmettono per un trasformatore ideale il quadrato
del rapporto di trasmissione:
ü
Z1
Z2
N1
N2
rapporto di moltiplicazione
resistenza apparente al lato d’ingresso
resistenza apparente al lato d’uscita
numero degli spiri al lato d’ingresso
numero degli spiri al lato d’uscita
ü2 = Z1 / Z2 = N12 / N22
Esempio
Un trasformatore considerato ideale ha una numero di avvolgimenti sul
lato d’ingresso di 200 e sul lato d’uscita di 800 spiri. Sul lato d’uscita è
_[[ç#
resistenza al lato d’ingresso?
Z1 / Z2 = N12 / N22
Z1 / 500 Ω = 2002 / 8002
Z1 = 31,25 Ω
Il trasformatore non trasmette soltanto resistenze apparenti, ma vengono
trasmessi anche resistenza reattive capacitive e induttive come anche
capacità e induttività.
Per le capacità C e le induttività L valgono i seguenti calcoli:
Capacità:
1 / ü2 = C1 / C2
Induttività::
ü2 = L1 / L2
121
Minos
3.4.2
Azionamenti elettrici e controlli automatici
Trasformatore reale
Un esempio di trasformatore reale è il funzionamento a vuoto, quando
l’avvolgimento iniziale non presenta una resistenza per carico. Quindi,un
trasformatore nel funzionamento a vuoto si comporta come una bobina
con una grande induttività.
Se al lato d’ingresso del trasformatore sussiste una tensione troppo grande, in seguito aumenta fortemente anche la corrente di magnetizzazione.
Questo può portare a bruciare l’avvolgimento e quindi alla distruzione
del trasformatore.
Un‘eventuale crepa d’aria nel nucleo di ferro del trasformatore aumenta
le correnti di funzionamento a vuotodeterminando l‘abbassamento del
fattore di potenza del trasformatore. Per evitare ciò, le lamine del nucleo
vengono ordinate una sopra l’altra in una maniera tale che i punti di contatto si trovano alternativamente su diversi lati del nucleo.
La tensione della corrente di avviamento nel caso di trasformatori può
>
#
$
$
sotto carico. I fusibili al lato d’ingresso del trasformatore a causa di questo
fenomeno devono essere programmati per una corrente nominale doppia.
Nel caso di trasformatori sotto carico una parte delle linee di forza elettrica del campo magnetico vanno anche al di fuori del nucleo e dunque
#
£
£
e nel caso di elevato numero dei trasformatori richiede una schermatura.
Questo vale soprattutto per la tecnica delle informazioni.
Per calcolare la tensione di cortocircuito del trasformatore vengono congiunti i due collegamenti del lato d’uscita, e dunque cortocircuitano. La
tensione di cortocircuito adesso è la tensione del lato d’ingresso, da cui
il trasformatore attinge la sua corrente di misurazione.
Una corrente di cortocircuito bassa implica una forte resistenza interna del
trasformatore. Per questi trasformatori la tensione iniziale sotto carico si
abbassa soltanto poco. Però nel caso di resistenze interne piccole ci sono
correnti di cortocircuito alte. Queste possono distruggere l’avvolgimento
e dunque il trasformatore intero.
I trasformatori che hanno una resistenza interna bassa, vengono denominati ‘resistenti alla tensione’. I trasformatori con un‘alta resistenza
interna invecesi chiamano ‘non resistenti alla tensione‘ .
Nel caso di trasformatori per corrente trifase e trasformatori di rete , la
tensione di cortocircuito è minore del 10% della tensione di misurazione,
mentre nel caso di (bell trasformer)è di circa il 40%.
122
Azionamenti elettrici e controlli automatici
Minos
Il rapporto fra energia raccolta ed emanata dal trasformatore viene chi$$
di perdite dovute al ferro e all‘avvolgimento.
£
$
rimane più o meno lo stesso. Il rendimento perciò rimane abbastanza
stabile a dispetto delle perdite nel ferro.
La diminuzione di rendimento per perdite di avvolgimento aumenta in
$
$matore dunque dipende dal suo carico. Nel caso di trasformatori di rete
le due potenze dissipatrici hanno la stessa grandezza.
Se un trasformatore viene azionato senza carico nell’avvolgimento iniziale
non nascono perdite di avvolgimento. Anche nell’avvolgimento iniziale le
perdite di avvolgimento sono basse perché le correnti sono molto basse.
La resa di un trasformatore nel funzionamento a vuoto dipende dunque
dalle perdite nel nucleo di ferro. Il rendimento per perdita d’avvolgimento
può essere misurato nel caso di funzionamento a vuoto.
Il calo di rendimento per perdita d’avvolgimento invece viene misurata
inoltre con l‘esperimento del cortocircuito attraverso il carico di misurazione. In questo caso gli avvolgimenti vengono attraversati da correnti
di misurazione corrente nominale e causano il il calo di rendimento per
perdita d’avvolgimento.
²
£
magnetico nel nucleo di ferro è molto basso e raramente c’è un calo di
rendimento per perdita nel ferro.
²$$$$
in un anno e il lavoro accolto nello stesso tempo. La differenza fra tutti e
due i valori è il lavoro di perdita del trasformatore.
Visto che le perdite legate al nucleo di ferro non dipendono dal carico,
$
$
un lungo tempo e soltanto temporaneamente sotto carico.
Se i trasformatori sono sotto carico soltanto per periodi brevi nonostante
siano accesi per molto tempo, essi devono essere costruiti in modo tale
che le perdite nel ferro siano più piccole delle perdite di avvolgimento.
123
Minos
Azionamenti elettrici e controlli automatici
3.5
Macchine elettriche giranti
3.5.1
Introduzione
Nelle macchine elettriche giranti si trova un rotoreche si gira durante il
servizio. Si può parlare generalmente anche di macchine elettriche.
A seconda del compito si distinguono motori, generatori e trasformatori.
Con i motori si trasforma l‘energia elettrica in energia meccanica. I motori vengono usati spesso e nel maggior numero dei casi servono come
propulsori.
La trasformazione di energia meccanica in energia elettrica avviene con
i generatori. Visto che l‘energia elettrica viene prodotta normalmente in
impianti più grandi, i generatori di solito sono più grandi dei motori. I generatori piccoli vengono usati nell‘alimentazione elettrogena d’emergenza.
Anche nelle macchine (automobili) ci sono generatori piccoli. Lì vengono
chiamati dinamo.
Per trasformare energia elettrica con una determinata tensione e frequenza in un‘altra tensione o frequenza vengono usati trasformatori elettrici.
Questo compito oggi, a causa degli sviluppi nell’elettronica, però viene
svolto da convertitori di frequenza, ovvero strumenti elettronici che non
hanno elementi giranti.
Le macchine elettriche giranti possono essere azionate con diversi tipi
di corrente. Molto spesso viene usata la corrente alternata, perciò le
macchine elettriche vengono chiamate anche macchine tri-fase
Le macchine a corrente alternata monofase come le macchine polifase,
vengono azionate con corrente alternata. Al contrario della corrente
alternata esse utilizzano una sola delle tre fasi. Le macchine a corrente
continuasono meno utilizzate.
Un‘altra denominazione per i motori elettrici è macchine polifase.
Questo nome viene usato se l’effetto del motore viene creato con un
campo magnetico girante.
Le macchine sincrone sono macchine elettriche nelle quali il numero dei
giri è uguale al numero dei giri del campo magnetico rotante. Al contrario
per le macchine asincrone il numero dei giri è minore o maggiore del
numero dei giri del campo magnetico rotante.
Per motori a induzione, l’energia elettrica viene trasmessa sul rotore
tramite induzione. Dunque non sono necessari contatti scorrevoli.
124
Azionamenti elettrici e controlli automatici
Minos
3.5.2 Macchine con campo rotante
Se si gira unmagnete permanente con forma di asta intorno al suo centro,
anche il campo magnetico gira. Nasce così il campo magnetico rotante.
Con la corrente alternata trifase un campo magnetico rotante può essere
creato anche senza il movimento di un magnete. Per crearlo tre bobine
vengono inserite in maniera regolare a 120°.
Se le tre bobine magnetiche vengono attraversate da una corrente alternata trifase, ogni bobina magnetica crea un suo campo magnetico.
Questi si collegano ad un campo magnetico risultante.
Visto che le singoli fasi della corrente trifase sono spostate di 120º, a
causa delle tre bobine viene creato un campo magnetico rotante con due
poli. Durante un periodo il campo magnetico rotante risultante fa un giro
di 360 º. Nel caso di una frequenza di 50 Hz ne risulta un numero di giri
di 3000 giri al minuto.
Nel caso di utilizzo di sei bobine queste vengono disposte una rispetto
all‘altra a 60º. Nasce un campo magnetico rotante di quattro poli che in
un periodo gira soltanto di mezzo giro. Nel caso di 50 Hz ne risulta un
numero di giri di 1500 giri a minuto.
U
U
120°
X
120°
120°
N
360°
90°
180°
270°
Y
V
t
S
W
Z
Immagine 57: Linee di forza elettrica di un campo elettrico
125
Minos
3.5.2
Azionamenti elettrici e controlli automatici
Momento torcente e rendimento
Sia nel caso dei motori che trasformano energia elettrica in energia meccanica, sia nel caso di trasformatori, che trasformano energia meccanica
in energia elettrica sussistono delle perdite. A causa di queste perdite si
sviluppa calore.
Si chiamano perdite nel ferro quelle che nascono a causa di correnti
parasite nel materiale magnetico. Perdite di avvolgimento sono le perdite che nascono nelle resistenze degli avvolgimenti quando vengono
attraversati dalla corrente.
gazzini e nelle spazzole può essere causa di perdite.
$ motore, ovvero il rapporto tra la resa effettiva alla resa attesa.
La resa effettivadel motore viene calcolata misurando il momento torcente e il numero di giri. La resa attesa dipende dalla rete e può essere
calcolata con uno strumento di misura adatto.
Il momento torcente rappresenta la forza alla circonferenza dell’albero
di propulsione. Viene misurato ad es. con la dinamo.
Le dinamo consistono di un generatore di corrente continua in cui la parte
esteriore, lo statore, rimane girevole. Durante la misurazione del momento
torcente anche sulla scatola del generatore agisce un momento torcente.
Questo momento torcente viene trasmesso tramite una leva su una
bilancia, dove la forza prodotta dal momento torcente può essere letta.
L’energia elettrica prodotta nel generatore viene dissipata in calore attraverso una resistenza di carico.
Il prodotto della velocità nominale del motore e del momento di dimensionamentoè la potenza nominale. È un rendimento meccanico che
dipende dall’albero. I valori più importanti sono indicati sulla targa dei
dati di funzionamento del motore.
Il senso di rotazione del motore indica, in quale direzione gira l’albero
guardandolo da un‘estremità.
Se le morse U1, V1 e W 1 di un motore a corrente trifase vengono collegate ai conduttori esterni L1, L2 e L3 ne risulta una rotazione oraria. Il
senso di rotazione può essere cambiato se si scambiano i due conduttori
esterni.
126
Azionamenti elettrici e controlli automatici
Minos
3.6 Motori asincroni
I motori asincroni vengono azionati con corrente continua o corrente trifase. Vengono usati molto spesso. A causa del campo magnetico rotante
nello statore viene indotta una tensione nel torcente che determina la
rotazione.
La trasmissione dell’energia nel rotore avviene tramite induzione. I motori
asincroni perciò vengono chiamati anche motori a induzione. Non sono
necessarie delle spazzole, che trasmettono corrente nel rotore.
Nel caso di motori asincroni, il numero di giri del rotore è diverso da quello del campo magnetico rotante nello statore. Questa differenza viene
chiamata „slip“. Viene indicata spesso in percentuale della velocità e nel
del campo magnetico rotante.
Nel caso di motori asincroni il numero di giri del rotore è più basso delnumero di giri del campo magnetico rotante. A differenza di ciò il numero di
giri di un generatore asincrono è maggiore del numero di giri del campo
magnetico rotante.
Se un motore asincrono viene azionato da una forza esteriore e con
ciò è aumentatoanche il numero di giri del rotore, esso lavora come un
generatore. I generatori asincroni vengono usati per potenze nominali
_¿
Esempio
Un generatore asincrono deve essere collegato alla rete per creare il
campo magnetico rotante dello statore. In questo caso dalla rete viene
presa la potenza reattiva. Alla rete però generatori asincroni trasmettono
una potenza effettiva.
Un motore bipolare a corrente trifase è stato collegato ad una rete di 50
Hz. Il suo rotore gira con un numero di giri di 2850 giri a minuto. Quanto
è alto il lo slip?
Nel caso di un motore a due poli collegato a 50 Hz il campo magnetico
rotante gira con 3000 giri a minuto. Dunque la differenza di velocità del
dincrono rispetto al numero dei giri del rotante è 150 giri a minuto.
lo slip risulta dalla differenza del numero di giri in rapporto alla velocità
del sincrono.
……………………..
Se il carico del motore viene aumentato il numero di giri del motore si
abbassa. Lo slip dipende dunque dal carico.
127
Minos
3.6.1
Azionamenti elettrici e controlli automatici
Rotore in cortocircuito
Il rotore di motori asincroni viene chiamato rotore in cortocircuito. Accanto
all’albero e un pila di lastre il rotore in cortocircuito contiene due anelli
Le due barre attraversano i gli interstizi nella pila di lastre. Le barre e i
due anelli di cortocircuito senza la pila di lastre formano una gabbia e
perciò i motori a rotore in cortocircuito vengono chiamati anche motore
in cortocircuito.
Le barre spesso sono inserite in maniera inclinata, e così il momento
torcente diventa indipendente dalla posizione del rotore. La forma delle
barre spesso è tonda, ma esistono anche barre rettangolari.
Il materiale della gabbia è alluminio o rame. Visto che con il rame le
perdite sono più grandi che con l‘alluminio, anche il grado di resa è un
po’più alto. A causa delle perdite nel caso di rotori di rame non sono
necessari programmi di raffreddamento agli anelli di cortocircuito come
ad es. ai rotori di alluminio.
Inoltre i motori con i rotori di rame vengono chiamati anche motori a
risparmio energetico. Però la coppia di avviamento nel caso di motori con
rotore di rame è più bassa che nel caso di motori con rotore di alluminio
visto che la resistenza del rame è più bassa.
Con il campo magnetico rotante nello statore del motore viene creato
uncampo magnetico rotante. Sulla base di questo viene creata una tensione nella gabbia del rotore e una corrente attraversa i conduttori della
gabbia che tramite gli anelli di cortocircuito sono collegati fra di loro.
la corrente nel rotore genera un campo magnetico che gira il rotore nel
senso di rotazione del campo rotante dello statore. Se il rotore raggiungesse lo stesso numero di giri del campo rotante dello statore nel rotore
non si indurrebbe più tensione e dunque non verrebbe creato il momento
torcente.
Per questo motivo nel caso di motori asincroni il numero di giri del rotore
intorno allo slip deve essere sempre più basso del numero di giri del
campo rotante dello statore.
Nel caso di motori in cortocircuito il rotore spesso si trova all’interno dello
statore. È anche possibile metterlo fuori. I motori piccoli … (external rotor
motor) vengono spesso usati. Il rotore esterno viene usato direttamente
per la propulsione, p.es per la propulsione di nastri trasportatori.
128
Azionamenti elettrici e controlli automatici
3.6.2
Minos
Motori a cortocircuito per corrente continua monofase
Nel caso di un motore per corrente continua monofase nasce un campo
magnetico alternativo. Questo può essere diviso in due campi magnetici rotanti della stessa intensità che però agiscono in sensi di rotazione
diversi.
Un motore costruito in questa maniera viene chiamato motore di avviamento. Dopo l’avviamento in un senso di rotazione il campo magnetico
alternativo si esercita sul motore a induzione determinando un momento
torcente e facendo girare il motore continua nella direzione iniziale.
In un altro tipo di motori accanto all‘avvolgimento centrale viene messo
un avvolgimento ausiliario, sfalsato di 90 °, nello statore. Per creare nello
statore un campo magnetico rotante è necessario uno spostamento temporale della corrente nell’avvolgimento ausiliario di fronte all’avvolgimento
principale. A causa del campo magnetico rotante risultante, questi motori
monofase possono avviarsi anche autonomamente.
Lo spostamento di fase dell‘ avvolgimento ausiliario di fronte
all’avvolgimento principale può essere raggiunto tramite condensatori,
resistenza o tramite un’induttività aggiunta alla bobina ausiliaria. Visto che
i motori monofase con le induttività aggiunte hanno soltanto un momento
d’avviamento basso, questo tipo di costruzione viene usato raramente.
Nel caso di motori capacitivi lo spostamento di fase viene creato con un
<
^¿
di rotazione viene raggiunto cambiando la direzione della corrente nel
avvolgimento secondario. Il cavo dell’avvolgimento principale non viene
cambiato.
Il coppia di avviamento del motore capacitivo dipende dalla grandezza
del condensatore. Per ua coppia di avviamento accanto alla capacità di
separazione di fase del motore viene messa in parallelo un capacitore
di separazione di fase del motore che dopo l’avviamento deve essere
spento perché a causa dell‘elevata capacità totale, una corrente eccessiva attraversa l’avvolgimento secondario causando il surriscaldamento.
Ad ogni kWin output il capacitore di separazione di fase del motore dovrebbe presentare una potenza reattiva di 1,3 kvar. Il condensatore di
avviamento dovrebbe avere un valore tre volte più alto.
%[[¿
&
un avvolgimento di resistenza. Anche in questo caso, dopo l’avviamento
del motore il dispositivo deve essere spento per evitare che si scaldi
troppo. Successivamente il motore lavora come un motore di avviamento.
129
Azionamenti elettrici e controlli automatici
Minos
Con l’aiuto del circuito Steinemetz, i motori normali per corrente trifase
possono essere azionati anche con una tensione trifase. Però il motore a
corrente trifase deve essere adatto ad una tensione di 230 V per poterlo
collegare a 230 V tensione trifase.
Uno degli avvolgimenti del motore a corrente trifase viene collegato direttamente con la rete. Il condensatore viene inserito in maniera parallela
ad uno dei altri due avvolgimenti.a seconda se l’avvolgimento segue un
giro a destra o a sinistra.
Visto che le correnti a causa dei singoli tratti hanno una grandezza diversa,
il campo magnetico rotante risultante sarà elittico. Il motore a causa della
$&
70% del suo oputput nominale per corrente trifase. Anche la coppia di avviamento ha un‘entità dimezzata rispetto al caso della corrente alternata.
La capacità richiesta dipende dalla tensione di misurazione. Nel caso di
230 V dovrebbero essere calcolati circa 70 kW di output nominale del
motore.
sensoRechtslauf
orario
L
W2
U1
130
W2
U2
V1
L
L
N
W1
V2
Immagine 58:
senso antiorario
Linkslauf
N
N
U1
W1
V2
U2
V1
L
N
U1
V1
W1
U1
V1
W1
W2
U2
V2
W2
U2
V2
Motore a corrente trifase collegato alla corrente alternata
Azionamenti elettrici e controlli automatici
3.7
Minos
Collettore del motore
Il collettore del lavora soprattutto in corrente continua. Però ne esistono
anche versioni per corrente trifase.
Il collettore vero e proprio si trova sul rotore che qui viene chiamato indotto.
Consiste di molte singole striscie di rame isolate fra di loro. Ognuna di
questi singole striscie è collegata con i singoli avvolgimenti dell’indotto.
Il collettore è anche detto commutatore.
'$
gono pressate contro le striscie di rame del commutatore. Mentre gira
l’indotto le spazzole scivolano sulle striscie di rame.
La corrente elettrica dalle spazzole tramite Il commutatore arriva all‘indotto
del motore. Visto che a causa del moto rotatorio dell‘armatura, le spazzole
una dopo l’altra entrano in contatto con le striscie di rame, anche tutti
gli avvolgimenti dell‘induttore che sono collegati con queste strisce, uno
dopo l’altro vengono attraversati dalla corrente.
Lo statore del commutatore viene chiamato anche telaio magnetico.
$
^[¿
$
perdite negli avvolgimenti sollecitati e dunque il motore ha un grado di
$
Se i cicli di conduzione dell‘induttore vengono attraversati da una corrente, il campo magnetico che nasce si sovrappone al campo magnetico
dello statore. A causa di ciò, sull‘induttore viene esercitato un momento
rotante. Tramite le spazzole e il commutatore, durante il movimento
rotatorio,i nodi dell’indotto vengono attraversati dalla corrente e creano
un momento torcente elevato.
Con un numero alto di cicli, durante la rotazione dell‘armatura viene creato
un momento torcente di grandezza omogenea.
Se la macchina a corrente continua è sotto carico a causa del campo
magnetico dell‘armatura, tutto il campo magnetico viene spostato. Dato
che le spazzole, in questo caso, non alimentano l’indotto con una corrente
$
$
Lo spostamento del campo magnetico può essere evitato con un polo
ausiliarioovvero avvolgimenti spostati di 90º rispetto al campo magnetico
principale e disposti nello statore. I poli ausiliari vengono collegati in serie
con l’indotto e dunque attraversati dalla stessa corrente.
131
Minos
Azionamenti elettrici e controlli automatici
I collegamenti dei motori a corrente continua e dei generatori a corrente
continua vengono chiamati nella stessa maniera. Dunque vengono usate
le seguenti lettere.
A
B
C
D
E
F
avvolgimento dell‘armatura,
avvolgimento di commutazione,
avvolgimento di compensazione,
avvolgimento in serie,
avvolgimento di shunt,
avvolgimento con eccitazione separata.
Con le cifre davanti a queste lettere vengono descritti avvolgimenti diversi. Le cifre successive segnano l’inizio dell’avvolgimento con un 1 e
^
]
risulta che il motore gira a destra. Il fenomeno viene evidenziato osservando l‘onda di propulsione.
Il cambiamento del senso di rotazione della propulsione avviene cambiando la direzione della corrente nell‘avvolgimento statorico. Si preferisce
cambiare la direzione della corrente tramite l’indotto.
corrente
di armaAnkerstrom
tura
corrente
di
Erregerstrom
eccitazione
Immagine 59:
132
Nascita del momento di coppia.
Azionamenti elettrici e controlli automatici
3.7.1
Minos
Accoppiamenti nei motori a corrente continua
Nel caso di motori a corrente continua si distingue il campo di avviamento
in riferimento alla connessione dell‘avvolgimento di indotto.
Nel caso del motori in serie l’avvolgimento d’indotto è collegato in serie
con l’avvolgimento dell‘armatura. Tutta la corrente che attraversa l’indotto
arriva anche nell’avvolgimento d’indotto.
Visto che specialmente durante l’avviamento l’amperagio è alto anche
il momento d‘avviamento è alto. I motori in serie quindi hanno la coppia
del rotore bloccato maggiore fra tutti i motori elettrici.
Se il motore viene azionato senza carico la corrente a causa degli avvolgimenti si abbassa e il campo d‘indotto diventa più debole. In seguito
il numero di giri del motore aumenta. Il motore in serie può raggiungere
un numero di giri così grande da autodistruggersi (overspeed).
Nel caso di motori piccoli l‘arresto viene evitato aggiungendo al motore
grandi ali di ventilazione. Nel caso di un elevato numero di giri, queste
ali creano un carico ulteriore. Una propulsione ad es. con cinghia piana
non deve essere realizzata con motori in serie visto che se la cinghia
salta dalla puleggia il motore senza più carico può andare in overspeed.
motore Reihenschlussmotor
con eccitazione in serie
L+
L–
A1
D2
A2
1L+
2L–
2L+
A1
M
E1
E2
motore
con eccitazione composta
Doppelschlussmotor
L+
L–
A1
M
Immagine 60:
L–
A2
motore con
eccitazione Motor
separata
Fremderregter
A2
L+
A1
D1
M
1L–
motore
con eccitazione a magneti
Nebenschlussmotor
F1
F2
M
E2
E1
D2
D1
A2
Collegamenti di motori a corrente alternata
133
Minos
Azionamenti elettrici e controlli automatici
I motori in serie vengono usati sopratutti in macchine a corrente, come ad
es. i tram. Il vantaggio, in questo caso è anche il grande momento di avvio.
Il controllo della velocità avviene con una caduta sulla resistenza in serie.
Il numero di giri però dipende anche dal carico. Se il telaio magnetico
del motore in serie è realizzato con lamine conduttrici, questi motori
sono adatti anche alla corrente continua visto che la corrente a causa
dell‘armatura e la bobina eccitata, cambiano la loro direzione in maniera
sincrona.
Nel caso di motori ad eccitazione separata, la corrente per la bobina
viene fornita da una fonte di tensione indipendente. Anche i motori con
tensione generata tramite magnete permanente sono motori ad eccita
<
[¿
Durante l‘avvio per regolare il numero di giri, la tensione nell’armatura
viene abbassata con una resistenza (resistori in serie). Il numero di giri
può essere aumentato oltre la frequenza nominale riducendo la tensione
nella bobina di eccitazione.
Visto che il campo magnetico nella bobina di eccitazione è indipendente
dall‘armatura, il numero di giri nel caso del motore ad eccitazione separata
è molto stabile anche nel caso di variazioni di carico.
In assenza di variazioni della tensione all‘armatura o per la bobina di
eccitazione, i motori ad eccitazione separata si comportano come motori
a corrente trifase. Senza carico non possono andare in overspeed.
I motori ad eccitazione separata vengono usati soprattutto per le macchine
utensili. Il motivo principale è la vasta possibilità in termini di numero di giri.
134
Azionamenti elettrici e controlli automatici
Minos
Nei motori motore con rotore avvolto in derivazione, l’avvolgimento
d’eccitazione è collegato in parallelo all‘armatura. Anche in questo caso,
il numero di giri può essere cambiato agendo sulla tensione dell‘armatura
e della bobina d’eccitazione.
Il numero di giri dei motori a corrente continua, similmente ai motori ad
eccitazione separata, cambia poco al variare del carico. La bobina di
eccitazione, durante il funzionamento, non può essere spenta indipendentemente dall’indotto, senza causare l‘arresto del motore.
Generalmente i motori che nel funzionamento a vuoto non si arrestano e
il cui numero di giri nel caso di carico si abbassa di poco, vengono chiamati motori con comportamento in derivazione. Ciò riguarda soprattutto
motori ad eccitazione separata, mentre per i motori a corrente continua
tale denominazione viene usata soltanto raramente.
Nel motore ad eccitazione composta (compound motor), oltre alla bobina
d’eccitazione c‘è un’altra bobina allineata all‘armatura. Tale dispositivo
ausiliario in serie serve per rafforzare il campo magnetico del avvolgimento d’eccitazione.
Se l’avvolgimento ausiliario in serie è collegato in maniera tale che il suo
campo magnetico ha la stessa direzione dell‘avvolgimento in derivazione,
si parla di un motore ad eccitazione composta. Senza carico questo motore si comporta come un motore a corrente continua. Se il carico aumenta
&
abbassamento maggiore che nel caso del motore a corrente continua.
Al contrario si parla di un motore ad eccitazione composta inversa
se l‘avvolgimento ausiliario in serie indebolisce il campo magnetico
dell’avvolgimento d’eccitazione. Questo può accadere ad es. quando il
senso di rotazione viene invertito.
I questi motori il numero di giri aumenta nel caso di carico. Perciò un
arresto del motore è possibile. Per questo motivo si evita tale tipologia
di motore che viene usato soltanto in casi rari, se ad es. a causa di un
carico il numero di giri non si deve abbassare.
I motori ad eccitazione separata spesso hanno un avvolgimento ausiliario
in serie. Il vantaggio consiste soprattutto nel momento di avvio più alto.
135
Minos
3.7.2
Azionamenti elettrici e controlli automatici
Motori universali
Nel caso di motori in serie, la corrente attraversa l’avvolgimento
d’eccitazione e l’avvolgimento d’indotto. Se la direzione della corrente
viene cambiata, tutt’e due i campi magnetici vengono commutati nello
stesso momento e il momento di corrente alternata continua ad avere
£
%&
corrente continua e corrente trifase.
Però per tener basse le perdite per le correnti parassite, durante il
servizio, il rotore e lo statore del motore devono essere fatti in lamiera.
L‘autoinduzione dell’avvolgimento d’eccitazione limita la corrente. A causa di ciò anche la resa del motore, il numero di giri e il momento di avvio
si abbassano. Il numero degli avvolgimenti delle bobine d’eccitazione
in durante il funzionamento deve essere più basso che con corrente
continua.
Motori del tipo descritto vengono chiamati motori universali. Essi vengono
prodotti soprattutto per il funzionamento con corrente alternata.
I motori universali funzionano in serie con momento di avviamento molto
elevato. Nel funzionamento a vuoto si arrestano. Tale reazione si evita
canismo o un ventilatore.
Tali dispositivi vengono usati soprattutto in piccoli utensili elettrici come
ad es. un trapano o in elettrodomemestici come le aspirapolvere .
La loro resa massima è di 1,5 kW.
La limitazione a piccole rese è causata anche dal fatto che con i motori
universali viene messa sotto carico soltanto una fase della rete di corrente alternata. Nel caso dei treni invece vengono usati motori in serie a
corrente alternata con rese di alcune centinaia di kW.
Il controllo della velocità avviene con delle resistenze in serie. Nel caso
di utensili elettrici viene usata anche un controllo con angolo di fase.
'$$
usati dei capacitori anti intreferenza che reprimono le interferencedeterminate dagli impulsi ad alta frequenza.
%
sul collettore sono montate tre spazzole, sfalsate di 120°. Questi tipi di
motori sono però poco utilizzati.
136
Azionamenti elettrici e controlli automatici
3.7.3
Minos
Guasti dei motori a collettore
Visto che i motori a collettore sono costruiti in maniera molto più complessa che ad es. i motori trifase con rotore in corto circuito, ci può essere
anche un numero maggiore di guasti. Attenzione particolare deve essere
dedicata al fenomeno dello scintillamento delle spazzole.
Nel caso di commutatori azionati con corrente continua tale fenomeno
non sussiste. Con corrente trifase, invece, l‘entità del fenomeno è debole.
Normalmente lo scintillamento delle spazzole è un segno che le spazzole
o il collettore sono in un cattivo stato. Le spazzole in particolare, sono da
controllare e probabilmente da pulire o molare.
essere collegamenti tra i singoli fogli del collettore.
Se spazzole troppo dure causano un cortocircuito è necessario utilizzare
fogli del commutaore più morbidi.
& spazzole troppo bassa. La pressione sulla spazzola si può aumentare
cambiando la forza elastica.
Lo scintillamento, inoltre, può essere un segno della presenza di sporcizia
tra le lamelle del collettore. In questo caso il collettore è da pulire o da
spegnere nell‘ipotesi di un collettore non tondo.
Altre cause di scintillamento sono:
- carico eccessivo; in questi casi il carico deve essere ridotto o bisogna
usare un motore più robusto.
­
polarità ed eventualmente cambiarla.
- posizione sbagliata delle spazzole. La posizione deve, se possibile,
essere cambiata.
L‘essesso di carico o la tensione troppo bassa possono determinare un
%>
sul collettore. Le cause di surriscaldamento devono essere eliminate.
Un eccessivo numero di giri, inoltre potrebbe indurre la rottura del motore.
137
Minos
Azionamenti elettrici e controlli automatici
3.8
Altri motori
3.8.1
Motori sincroni
I motori sincroni vengono chiamati anche rotori magnetici, visto che nel
rotore si trova un magnete permanente o un magnete elettrico. Nei motori
sincroni per corrente trifase si preferisce inserire magneti permanenti.
Per l’alimentazione degli magneti elettrici sono necessari anelli collettori
all’indotto.
La corrente trifase e gli avvolgimenti dello statore generano un campo
#
£
nel rotore.
Se il rotore è fermo e il campo rotante viene acceso il rotore non può
seguire il campo. Se invece si gira il rotore, questo viene attratto dal
campo. In questo caso il rotore raggiunge lo stresso numero di giri del
campo rotante.
Per avviare il motore sincrono la frequenza del campo magnetico rotante
deve essere aumentata lentamente da 0 Hz a 50 Hz. Per farlo è necessaria un aiuto in avviamento.
Se nel rotore si trova un avvolgimento a gabbia, il motore all’inizio parte
come un motore asincrono. L’avvolgimento all‘armatura indotto durante
l’avviamento deve essere limitato da una resistenza che agisca sulle
tensioni indotte nell’avvolgimento stesso.
Quando il rotore nel funzionamento asincrono ha quasi raggiunto il
numero di giri del campo rotante, la corrente di eccitazione per l’indotto
viene erogata.
L’avvolgimento a gabbia evita inoltre che il rotore oscilli nel caso di carichi variabili, e perciò viene chiamato avvolgimento smorzatore che è
particolarmente utilizzato nei motori sincroni di grandi dimensioni.
Durante il funzionamento l’indotto mantiene stabile il numero di giri del
campo rotante, anche sotto carico. Tuttavia, nel caso di carichi grandi,
l’indotto si colloca dietro il campo rotante sfalsato del cosiddetto angolo
di carico. Tale angolo si annulla nell‘ipotesi di assenza di carico.
Sotto carico,inoltre, il momento rotante del motore tende ad aumentare.
Se il motore è a due poli, il massimo viene raggiunto con un angolo di
carico di 90°. Questo valore viene chiamato momento di beccheggio.
Nell‘ipotesi di ulteriore aumento del carico, il momento torcente si abbassa
e senza gabbia il motore si ferma.
£ X momento di beccheggio
138
Azionamenti elettrici e controlli automatici
Minos
Nel caso di motori sincroni la corrente di eccitazione durante il funzionamento può essere più debole o più forte. Se la corrente è debole, anche
la tensione indotta è più bassa della tensione della rete. A causa di ciò il
motore sincrono prende potenza reattiva dalla rete.
Nel caso di corrente forte, il motore sincrono è sovraeccitato. Questa
circostanza implica che la potenza reattiva induttiva viene immessa nella
rete. Il motore sincrono in questo caso ha un carico capacitivo.
Motori sincroni di grandi dimensioni vengono azionati parzialmente
senza carico, ma anche sovraeccitati. In base alla loro funzione vengono
chiamati anche macchine di spostamento di fase.
I „motori a poli schermati“ sono motori sincroni per corrente monofase
e corrente alternata. Nel rotore si trovano magneti permanenti con due
o quattro poli. Lo statore ha lo stesso numero di poli del rotore. Dopo
l’avviamento, il rotore gira con lo stesso numero di giri del campo rotante.
Anche con un numero basso di poli, il numero di giri è abbastanza alto.
Questi motori perciò vengono chiamati anche motori a poli schermati
veloci.
%
>%>
esistono tipologie di motore con rotori sia interni che esterni. La potenza
;¿
quale il loro utilizzo è adatto per orologi e strumenti di misura .
I motori condensatori che lavorano come motori sincroni hanno un elevato numero di giri. Essi presentano due o quattro poli e sono dotati di
un meccanismo per la riduzione del numero dei giri.
Tramite il condensatore viene creato uno spostamento di fase della corrente nel secondo avvolgimento dello statore generando così un campo
magnetico rotante. In base al circuito del condensatore, prima di uno
dei due avvolgimenti, viene effettuato un giro in senso orario o nell’altra
direzione.
Il momento di avviamento è normalmente abbastanza basso, come
nei motori sincroni. I rotori dei motori condensatori come i motori a poli
schermati, possono essere interni o esterni. In particolare, in relazione
al loro campo rotante, i motori condensatori sono più uniformi e hanno
$
Stante la resa paragonabile, dunque, i motori condensatori sono sempre
di piccole dimensioni.
139
Minos
3.8.2
Azionamenti elettrici e controlli automatici
Motore multifase
I motori multifase nel rotore hanno un magnete permanente. La guida
viene eseguita tramite impulsi di corrente continua - rettangolari. Con
ogni impulso il rotore si gira un passo avanti. Se i passi si susseguono
velocemente l’uno dopo l’altro, il motore multifase ha un movimento di giri
ininterrotto. Il giro che il rotore fa in seguito a un impulso viene chiamato
angolo di base del motore. Il numero dei passi dipende dal numero degli
]
$
Il motore multifase si distingue in motori a uno, a due o a cinque sezioni.
Gli avvolgimenti di ogni tratto possono essere unipolari o bipolari. Per
invertire il campo magnetico nel caso dell‘ avvolgimento unipolare basta
un‘alterazione dello stato dell‘interruttore unipolare; per un avvolgimento
bipolare sono necessarie invece alterationi di interruttore bipolari.
La selezione dei motori multifase non avviene nè con interruttori meccanici nè elettromeccanici, ma con speciali circuiti di innesco che contengono
una microcomputre con un generatore d‘impulsi a tempo.
I motori possono creare un campo rotante in soltanto in una direzione.
Un cambiamento della direzione dei giri non è possibile. Nel caso dei
motori a due e cinque sezioni, un cambiamento della direzione dei giri è
possibile con un diverso ordine di innesco delle singole bobine.
Il movimento in avanti del rotore, in corrispondenza dell‘angolo di base,
dopo il cambiamento della selezione, viene chiamato passo a modalità
completa. Viceversa si parla di passo a modalità parziale se il motore
gira di un angolo di base dimezzato.
Inoltre esiste un passo a modalità micro nel quale attraverso diversi amperaggi, l‘intero angolo di base del motore viene suddiviso in diversi passi.
La grandezza dell‘ angolo di base del motore dipende dal numero dei
poli, dal numero dei tratti e dalla modalità di funzionamento (angolo di
base completo o dimezzato).
Angolo di base del motore tipici si trovano nell’intervallo fra 1,8° e 45º.
^[[
a giro.
Il numero di giri dipende, quindi, dall‘angolo di base del motore e dalla
frequenza con la quale i singoli avvolgimenti vengonoeffettuati (serie di
connessioni).
140
Azionamenti elettrici e controlli automatici
Minos
I motori a passi con disco magnetico hanno un rotore che consiste di
un sottile disco di un magnete permanete. La massa del rotore è molto
bassa cosicchè il motore può cambiare direzione velocemente.
Nel caso di motori multifase con grandi angoli di base (da circa 7,5 º), lo
'&
che i poli delle due bobime statoriche cambiano uno dopo l’altro. Il rotore
ha lo stesso numero di poli.
I motori multifase con il principio monopolare hanno un numero di poli più
alto dei motori multifase con il principio di poli variabili. Per essi risultano
quindi degli angoli di base più bassi.
Il rotore consiste di due singole ruote,i poli salienti del rotore, che fuori
hanno denti. I poli salienti del rotore sono sfalsati di mezzo dente. Se lo
statore non viene attraversato dalla corrente il rotore è in posizione di
arresto.
Per consentire il passaggio della corrente nei singoli avvolgimenti del
]
tato un solo avvolgimento, nel caso dicomando a due sezioni, vengono
sollecitati due avvolgimenti simultaneamente.
Il conteggio dei singoli contatti, così come il corretto ordine di avvolgimento
nel circuito è regolato da un microcontroller (driver).
Per garantire che il motore sotto carico possa essere avviato senza errori,
la coppia massima di avviamento non va superata. L‘accelerazione (in
termini di numero di giri desiderato) deve avvenire lentamente in particolare nella rampa di accelerazione e decelerazione.
Nel caso del motore multifase, il carico massimo durante il servizio viene
chiamata coppia a pieno carico. Ad un carico di notevole entità corrisponde un grande angolo di carico che determina la rotazione dell‘indotto.
L‘angolo di carico può raggiungere al massimo l‘ampiezza corrispondente
a un passo.
I motori multifase hanno un basso rendimento sebbene esistano mec
£
motori multifase vengono usati ad es. nelle stampanti o per gli attuatori.
141
Azionamenti elettrici e controlli automatici
Minos
3.9
Controllo e regolazione di motori a campo rotante
L‘accensione di un motore spento implica un numero di giri tale da azionare il motore. Questo processo viene chiamato anche mettere in moto.
I motori piccoli si accendono direttamente con interruttore o indirettamente
con i relè.
I commutatori a camme azionati sono azionati in maniera manuale: i
singoli contatti vengono aperti o chiusi tramite interruttori. La posizione
di chiusura dei contatti è tabellata.
I contattori azionati in maniera elettromagnetica possono essere azionati
anche con corrente continua o trifase. Per il circuito principale normalmente ci sono tre contatti. Eventuali contatti ulteriori vengono chiamati
contatti ausiliari che consentono la commutazione dei circuiti di comando.
I contattori statici sono dei semiconduttori che lavorano senza movimentazione meccanica. Durante il funzionamento essi lavorano silenzionamente
ma determinano temperature maggiori dei contattori elettromagnetici e
non sono adatti a separare il carico dalla rete.
La loro resistenza quando i contatti sono chiusi è minore di quando gli
stessi sono aperti.
L1
L2
L3
PE
elementi
Schaltdi
coman- Schaltstellung
doglied
R
L
0
A
L3
L2
L1
B
D
D E
E
F
F
W
V
A B C
U
C
Schaltglied offen
PE
Schaltglied geschlossen
M
3˜
%#Y#
142
Azionamenti elettrici e controlli automatici
Minos
Quando i motori elettrici vengono accesi assorbono una considerevole quantità di corrente d’inserzione. Notevole è anche la corrente
d’avviamento per ilraggiungimento del numero di giri necessario
all‘accensione.
Per evitare che in una rete pubblica si abbassi la tensione o che vengano
azionati sistemi di protezione per sovraccarichi, la corrente d’avviamento
[ tecniche di collegamento della rete locale.
I motori che hanno una corrente d’avviamento non superiore ai 60 A,
possono essere accesi direttamente. I motori per corrente alternata
$
;ª²rente alternata con corrente d’avviamento sotto i 60 A hanno una potenza
_^²
Per motori più grandi è necessario una rotazione anodica di avvio. Questi
motori raggiungono lo stato di servizio in più passi e quindi la corrente
d’avviamento può essere limitata eventualmente con l‘ausilio di una
ulteriore resistenza.
L‘apparecchio in cui è inserita la resistenza viene chiamato starter. Se è
inserita anche una protezione contro il sovraccarico di corrente, tutto il
dispositivo viene chiamato motore starter.
3.9.1 Circuito starter per motori a corrente alternata
Nel caso di motori a corrente alternata, il rotore è in cortocircuito e la
&
rante l’avviamento perciò viene abbassata la tensione con conseguente
decremento della corrente d’inserzionee del momento torcente.
;;¿
connessione avviamento stella-triangolo. Per realizzarla, il motore deve
essere adatto alla connessione a triangolo con 400 V.
Quando si accende il motore, le bobine vengono collegate a stella. Ad
ogni bobina, quindi, rimane una tensione di soltanto 230 V cui corrisponde un momento d’avviamento pari a un terzo del momento torcente
nella connessione a trinagolo.
La connessione a stella-triangolo perciò va usata soltanto quando il
motore può essere avviato gradualmente.
Quando è stato raggiunto il numero di giri di regime le bobine vengono
collegate in modalità a triangolo, cui corrisponde una tensione di 400 V
per ogni bobina e il motore raggiunge il pieno momento torcente.
143
Azionamenti elettrici e controlli automatici
Minos
Il passaggio dalla connessione a stella alla connessione a triangolo può
avvenire m o con interruttori a camme. Se però si continua ad azionare
un motore nella connessione a stella, le bobine saranno attraversate
da correnti di entità maggiore di quella consentita. Il motore viene cioè
sovracaricato e gli avvolgimenti si fulminano.
Nel caso di uso del relè è necessario un relè di rete per fornire la tensione
la tensione e due relè, rispettivamente a stella e a triangolo, perle due
modalità di commutazione . Durante l’avviamento del motore, accanto al
releè di rete, viene commutato anche il relè a stella. Il relé a stella dopo
un periodo di tempo predeterminato viene spento con un dispositivo
appositamente previsto e subeentra il relè a triangolo.in un sistema di
commutazione automatica.
Un’altra possibilità per limitare la corrente elettrica in fase di avviamento
è l’uso di reattori. Questi dispositivi vengono commutati come resistenze
con induzione di cortocircuito.
Quando il motore raggiunge il numero di giri, si alza la tensione e il relé
può commutare e superare i reattori.
#
;_¿
L1
U
L1
U
230 V
W
L3
V
L3
W
Immagine 62:
144
Connessione a stella-triangolo
L2
V
L2
avvio
Anlauf
400 V
operazione
Betrieb
Azionamenti elettrici e controlli automatici
Minos
;_¿
essere usati resistenze addizionali. Questi tipi di connessione spesso
vengono usati se i motori sono commutati a stella e in questo caso vengono chiamati avviatori a punto neutro. Quando il motore viene avviato
le resistenze sono però soggette a surriscaldamento.
Nei motori piccoli che potrebbero essere avviati direttamente, qualche
volta viene inserita una resistenza in un conduttore della linea di allacciamento che viene superata al termine della fase di avviamento.
L’avviamento degli motori con la resistenza è più graduale. Dunque questo
circuito viene chiamato indotto in cortocircuito di avviamento graduale.
^^¿
Una variante con alti costi d’acquisto è l’uso di trasformatori d’avviamento.
In questo caso durante l’avviamento del motore viene abbassata la tensionecon l‘ausilio di trasformatori d’avviamento per motori di corrente
alternata con indotto in cortocircuito.
In questo caso la resa è minore di 15 kW.
L1
L1
L2
L2
L3
L3
PE
PE
F1
F1
S1
S1
M1
PE
U1 V1 W1
K1
M
3˜
U2 V2 W2
M1
Immagine 63:
PE
R1
M
3˜
Avvio di valvola a farfalla e avvio di resistenza
145
Azionamenti elettrici e controlli automatici
Minos
Gli avviatori elettrici evitano l‘inserimento di resistori addizionali nel motore. Assorbendo un‘aliquota consistente di potenza, questi dispositivi non
sono economici, soprattutto se utilizzati per lunghi periodi.
Gli aviatori elettrici determinano un abbassamento della tensione dato
£
della tensione sinusoidale.
'
X£
l’andamento della tensione sinusoidale.Il controllo dell‘angolo di fase, nella prima parte caratterizzata da tensione alternata sinusoidaledetermina
l‘assenza di passaggi di corrente nel motore. Soltanto dopo un arco di
tempo, il resto della curva sinusoidale viene lasciato libero. La tensione
£
Nel caso del regolazione di taglio in fase discendente, l’inizio della curva
sinusoidale rimane originale. In questo caso la tensione risultante viene
£
per lo zero della curva sinusoidale.
Il settore di controllo è una combinazione di angolo di fase e Abschnittsteuerung. La parte intermedia della curva sinusoidale rimane inalterata.
La sua ampiezza viene indicata come tensione risultante.
U, I
regolazione di taglio, fase ascendente
Anschnittsteuerung
t
U, I
regolazione
di taglio, fase discendente
Abschnittsteuerung
t
U, I
regolazione di taglio, segmento
Sektorsteuerung
t
Immagine 64:
146
Regolazione di taglio in fase ascendente, discendente e a segmento
Azionamenti elettrici e controlli automatici
Minos
In aviatori elettrici vengono usati i triodes o triacs caratterizzati da
un‘elevata resistenza prima dell‘ accensione che determina una decrescita della corrente verso lo zero.
Dopo la regolazione, i triacs in fase di l’accensione non oppongono
£
&
relativamente bassa.
L’aviatore elettrico del motore consiste di un organo di comando e di un
organo di potenza. Nell‘organo di comando si trova l’unità di comando
che fornisce gli impulsi d’accensione per gli elementi che si trovano nell‘
organo di potenza.
Nell‘organo di potenza in fase sono inseriti due triac in parallelo, ma in
direzione opposta. Gli aviatori di motori anche con corrente trifase possono utilizzare due o tre fasi. In quest‘ultimo caso sono necessari due
ristori e più triac.
Un altro campo d‘applicazione degli aviatori è l’avviamento graduale di
motori. In questo caso con il controllo dell‘angolo di fase la tensione del
motore viene innalzata dal 40% al 100 %. L‘intervallo di tempo in cui si
%>
tempo di rampa più veloce è l‘avviamento del motore.
Una limitazione di corrente abinata all‘ausilio degli aviatori, determinano la
limitazione della corrente d’avviamento. In questo caso la tensione viene
aumentata ma sempre entre un certo limite della corrente di avviamento.
In questo modo, tuttavia, il tempo d’avviamento te nde ad aumentare.
Gli aviatori di motori elettrici possono avere anche la funzione di lento
spegnimento del motore. Abbassando lentamente la tensione dal 100 %
al 40 % viene abbassato anche il numero di giri.
Con la funzione di risparmio energetico degli aviatori, la tensione, nel
caso di motori che non devono essere caricati a pieno, viene abbassata.
Uno svantaggio degli aviatori elettrici è la mancanza di una separazione
totale tra motore e rete. Per questo motivo è necessario un interruttore
che determini l‘apertura dei contatti ove necessario, come nelle situazioni
di emergenza.
Nel caso di grandi aviatori di motori occorre prestare particolare attenzione
alle le perdite sottoforma di calore. I dispositivi attualmente utilizzati, in
base alla loro forma, sono dotati di un radiatore con alette. Il calore che
si sviluppa ad es. in un armadio di distribuzione deve essere fatto uscire.
147
Minos
3.9.2
Azionamenti elettrici e controlli automatici
Localizzazione e direzionamento di commutatori
I motori a corrente continua di piccole dimensioni e in serie non possono
essere accesi direttamente. Nel caso di motori più grandi l‘accensione è
subordinata all‘abbassamento della tensione determinato dall‘utilizzo di
resistenze. Le bobine di impedenza e i trasformatori non possono essere
invece utilizzati data l‘assenza di tensione alternata.
Spesso dalla tensione continua si passa alla tensione alternatacon l‘ausilio
di triac che sostituiscono i normali diodi.
I triac come i diodi bloccano la corrente in una direzione. Il passaggio
della corrente è consentito solo dopo un innesco generato da impulsi a
comando.
la tensione alternata viene ridotta di un‘entità maggiore o minore. La distanza tra innesto e il punto di passaggio per lo 0, viene chiamato angolo
d’innesto. Tale angolo può variare fra 5 ° e 180 º.
I triac, in teoria, possono essere usati in tutti i circuiti a per il raddrizza
~
£&
vengono usati soprattutto i circuiti a ponte.
Se tutti i diodi di un circuito a ponte vengono sostituti con triac, questo
viene chiamato circuito a ponte a pieno comando. Tali sistemi sono necessari se il motore deve lavorare anche come freno e ridare corrente
alla rete.
Nel maggior numero dei casi vengono usati circuiti a ponte parzialmente
comandati. In questi casi veine sostituito soltanto un diodo con un triac.
Collegando un motore a corrente continua con la rete trifase di corrente
Nei motori con eccitazione in serie alimentati in corrente continua la
corrente viene controllata con un dispositico che apre e chiude il ciruito
per un breve tempo e livellata con l’ausilio di un’induttanza.
Maggiore è il tempo di accensione, più alta è la tensione. Questa modaX£
perdite più basse dell‘eventuale utilizzo di resistenze.
148
Azionamenti elettrici e controlli automatici
Minos
Per avviare un motore a corrente continua e ad eccitazione separata quasi
sempre viene usato un aviatore. All‘accensione, la tensione d’eccitazione
è già a regime, mentre la tensione d’indotto è ancora bassa.
Con una resistenza regolabile, la tensione d’indotto si abbassa in maniera
molto agevole.
Spesso l’alimentazione di tali motori avviene con l’aiuto di un raddrizzatore dalla rete di corrente trifase. In questo caso i raddrizzatori devono
essere capaci di abbassare la tensione d’indotto utilizzando il controllo
dell‘angolo di fase o l‘ Abschnittssteuerung.
I motori universali spesso possono essere accesi direttamente visto che
si tratta prevalentemente di motori piccoli. Per un avviamento graduale,
la tensione può essere abbassata con una bobina di impedenza.
&
£
dall‘angolo di fase o l‘ Abschnittssteuerung.
Gli interruttore a reostato (dimmer) hanno la stessa modalità di funzionamento e sono adatti a motori per i quali è stata eseguita anche la
regolazione dei giri.
L1
L2
L3
D1
Q1
D2
Q2
D3
Q3
M1
2D2
Immagine 65:
2D1
A2
M
A1
1D2
1D1
Ponte circuito half-controllato
149
Minos
3.10
Azionamenti elettrici e controlli automatici
Protezione del motore
I motori elettrici possono comunque sopportare un certo sovraccarico.
Se il sovraccarico però dura troppo o è troppo alto gli avvolgimenti si
surriscaldano e possono essere danneggiati determinando il fulminamento del motore.
Con i fusibili normali, la protezione del motore dal sovraccarico non è
possibile. I fusibili sono prodotti per un‘alta corrente d’inserzione e dunque
non reagiscono ad un eventuale sovraccarico.
Sono utilizzati come dispositivi per la sicurezza dei motori, anche le lamiere bimetalliche. L‘ assorbimento elevato di corrente determina il riscaldamento e il cambiamento di forma del bimetallo. I contatti si aprono e il
motore viene spento. Tale fenomeno viene chiamato disgiunzione termica.
Il riscaldamento delle lamiere di bimetallo ha bisogno di un certo tempo.
Nel caso dei interruttori salvamotore con bimetallo questo ritardo è desiderato per evitare reazioni indesiderate nell‘ipotesi di innalzamento della
corrente durante l’accensione o durante un breve sovraccarico.
Tali dispositivi non garantiscono la protezione del motore durante un
cortocircuito del motore. In tale frangente è previsto l‘utilizzo di fusibili.
Alcuni interruttori, oltre alla lamiera di bimetallo, hanno un sistema di
sicurezza basato su scatto istantaneo che consiste di una bobina con
indotto. Nel caso di correnti troppo alte con movimenti dell’indotto, i contatti fondono determinando lo spegnimento del motore.
L’interruttore termico e l’interruttore a scatto istantaneo vengono allineati.
L’interruttore termico, che è meno sensibile, viene regolato sulla corrente
di dimensionamento del motore. L’interruttore a scatto istantaneo elet
>
reagisce nel caso di cortocircuiti.
La presenza di archi elettrici durante un cortocircuito può aggirare il
sistema salvamotore, superando i contatti aperti.
Per questo motivo anche nell‘ipotesi di utilizzo di interruttori salvamotori
deve essere usato un certo numero di fusibili.
Gli interruttori salvamotori vengono usati soprattutto nei motori di piccole
e medie dimensioni. Per essi possono generarsi dei guasti data l‘assenza
di monitoraggio della temperatura di avvolgimento.
Così ad es. nel caso di raffreddamento del trigger termico si possono
150
Azionamenti elettrici e controlli automatici
Minos
La sorveglianza diretta della temperatura dell’avvolgimenti avviene con
conduttori a freddo che si trovano direttamente sugli avvolgimenti dei
motori. Se la temperatura degli avvolgimenti è troppo alta la resistenza
dei conduttori a freddo aumenta.
A causa dell‘aumento di resistenza del conduttore a freddo, un relè si
abbassa e tramite un altro relé viene spento il motore. Il monitoraggio
della temperatura dei avvolgimenti dunque è legata ad un dispositivo a
elevata sicurezza.
In linea di massima nel caso di salvamotori si distingue se dopo il riscaldamento il motore viene acceso da solo o se esiste una barra di
reinserimento. In questo caso l‘operazione è manuale.
E‘possibile anche un‘operazione parzialmente manuale e parzialmente
automatica.
L1
L
L2
L3
F2
PE
F1
S1
K1
S2
K1
B1
B1
M1
Immagine 66:
PE
K1
M
3˜
N
Relè di protezione del motore
151
Minos
Azionamenti elettrici e controlli automatici
3.10.1 Classi di isolamento
Durante il funzionamento, le macchine elettriche si riscaldano a causa
calore nell’ambiente non determina una condizione di equilibrio termico.
a seconda degli isolanti usati nella macchina non vanno superate le
temperature permanenti massime.
Per macchine le elettriche valgono le seguenti classi di isolanti e temperature massime:
Y
90° ( ad es. plastiche di conduttori)
A
105 ° (ad es. smalti della classe A per avvolgimenti)
E
120 ° (ad es. carta compressa di pezzi pressati)
B
130 ° (ad es. prodotti a mica per pezzi pressati)
}
;__¶"
\
Æ
;[¶"
stenti al caldo)
C
> 180° (ad es. porcellana per isolanti)
Si chiama incremento limite di temperatura la massima differenza di
£$$#
$$cata in gradi Kelvin. Nel caso di raffredddamento ad aria si suppone una
£$$[¶
L‘incremento limite di temperatura degli avvolgimenti varia da circa 70K
;[[
$$&;^_%$
paragone: L‘incremento limite di temperatura di cuscinetti lisci o cuscinetti
a rotolamento si trova tra 45 e 65 K.
152
Azionamenti elettrici e controlli automatici
Minos
3.10.2 Modalità di lavoro
Il riscaldamento di una macchina dipende anche dal tempo di funzionamento. Se tale periodo è breve, la macchina, anche se molto caricata,
può avere un aumento di temperatura più basso rispetto al caso in cui il
tempo di funzionamento è prolungato e il carico è minimo.
nominali. Le condizioni di azionamento di una macchina sono indicate
sotto.
Durante il regime continuo S1 la macchina con il suo carico nominale
massimo viene azionata in modo permanente senza che venga superata
la temperatura limite. Se sulla targa delle istruzioni della macchina non c`è
una indicazione diffrente, la macchina può lavorare a regime continuo.
Per il breve periodo, il carico nominale massimo della macchina a regime
è basso se lo si paragona con quello della macchina è spenta, pertanto, la
temperatura massima non viene raggiunta. In tale frangente la macchina
]
periodo se il funzionamento non supera 10, 30, 60 o 90 minuti e deve
essere indicato sulla targa delle istruzioni.
Il servizio d’arresto S4 tiene conto dell‘eventule elevata frequenza di
accensione o dell‘elevata lunghezza del processo d’avviamento. In tale
fase viene indicato inoltre il momento di inerzia del motore e il momento
di inerzia massimo possibile per il carico.
Sulla targa delle istruzioni deve inoltre essere indicata l‘entità del calore
generato in questa fase (Aussetzbetrieb).
Le altre modalità di funzionamento si riferiscono a casi di funzionamento
ininterrotto del motore, anche non sotto carico.
La modalità du funzionamento S6 indica l‘intervallo di tempo massimo
in cui il motore, nell’arco di unturno, può lavorare sotto carico.
La modalità du funzionamento S7 tiene conto del riscaldamento durante
la frenatura elettrica.
Se un motore lavora con diverse velocità la massima durata d’inserzione
viene indicata con la modalità di funzionamento S8. La modalità du funzionamento S9 invece considera i cambiamenti di entità del carico e del
numero di giri. Vengono valutate cioè le punte di carico che superano la
potenza nominale.
153
Minos
3.11
Azionamenti elettrici e controlli automatici
Sicurezza di funzionamento
Per evitare incidenti, i lavori ad impianti elettrici devono essere eseguiti
in assenza di tensione. Sono permesse alcune eccezioni.
In relazione al livello di complessità si distingue tra lavori profani o specializzati .
_[²;^[²
Un lavoratore specializzato deve aver avuto una formazione professionale
in ambito elettrotecnico. Inoltre uno specialista oltre ad esercitare da tem$
$
Per disconnettersi dalla rete è necessaria la separazione dell’impianto da
tutti i conduttori sotto tensione. Conduttori collegati a terra non rientrano
tra questi. Nel caso di tensioni sopra 1 kV devono essere evidenziati
punti di separazione visibile.
Per la disconnessione è responsabile la persona sorvegliante. Prima
connessione è avenuta correttamente.
Dopo la disconnessione occorre evitare che qualche conduttore sia
collegato nuovamente con la rete. Ciò può essere garantito eliminando
i fusibili e fornendo un cartello di indicazione in merito.
da tensione e quindi tutti i circuiti sono stati eliminati. La prova l‘assenza
di tensioni di alimentazione va effettuata al punto di innesto dell‘utenza
e non solo all‘interruttore generale.
;[[[²
cuitare e da collegare a terra nella fase 4. L’impianto necessario per tale
fase deve essere collegato prima con la terra e poi con l’impianto.
Nell‘ultima fase le parti sotto tensione devono essere coperteper evitare
l‘eventuale contatto. Questo passo, come il precedente, aumenta i limiti
di sicurezza.
154
Azionamenti elettrici e controlli automatici
Minos
Per riaccendere l’impianto questi cinque passi sono da svolgere in successione diversa. La tensione va accesa soltanto quando l’approvazione
del posto di lavoro è stata assicurata.
Per risparmiare costi è possibile anche il lavoro sotto tensione. A causa
dei pericoli legati a ciò sono da rispettare misure di sicurezza speciali.
Questi lavori devono essere eseguiti soltanto da persone con una formazione speciale.
3.11.1 Misure di protezione
Per evitare accidenti con energia elettrica parti dell’impianto sotto tensione non vanno toccati. Si divide fra il contatto diretto bipolare, durante
il quale la corrente attraversa un conduttore, il corpo e poi un altro conduttore; e il contatto unipolare. In questo caso la corrente attraversa il
corpo arrivando in terra.
In teoria il tocco unipolare è così pericoloso come il tocco bipolare. Soltanto se la persona che tocca è isolata verso la terra non c’ è pericolo.
Questo può essere il caso nei campi di prova o lavorando su potenziale
nel caso di elettrodotti ad alta tensione.
Una protezione dal contatto diretto accade con l’isolazione di parti sotto
tensione o tramite la copertura di questi pezzi. Tramite ostacoli va evitato
un contatto casuale.
Si chiama contatto indiretto se a causa di uno sbaglio di isolamento le
parti che di solito non sono sotto tensione la conducono.
Un altro mezzo protettivo sono protettori dalla corrente di guasto. In questo
caso viene viene paragonato la corrente che va verso il consumatore con
quella che ritorna da lui. Nel caso di un impianto che lavora regolarmente
tutt’e due correnti hanno la stessa grandezza.
Nel caso di uno sbaglio di isolamento una parte della corrente non tornerebbe sul … (Summenstromwandler) e l’impianto di sicurezza parte.
Questo succede spesso con un … (Bemessungsdifferenzstrom) di 30
mA. Questa corrente non dovrebbe poter causare un incidente mortale.
Nonostante ciò impianti di sicurezza per corrente di guasto sono soltanto
una misura di sicurezza in più.
155
Minos
Azionamenti elettrici e controlli automatici
3.11.2 Protezione dai malfunzionamenti
Per garantire la protezione dai malfunzionamenti vengono impiegate opportune misure di prevenzione che nel caso di guasti evitano il pericolo.
Particolare attenzione va in questo ambito alla protezione da contatto
indiretto.
~
$&
cuito o dispersione verso terra. Tali fenomeni possono essere isolati o
Si parla di contatto di massa nell‘ipotesi di assenza di tensione prodotto
da isolamento con conseguente danneggiamento della macchina. Tale
&
Un cortocircuito è il contatto di due conduttori in tensione. In questo caso
possono essere indotte tensioni sul cirpo.
contatto con la terra, generando una tensione fra la posizione di contatto
con il conduttore e un punto a breve distanza.
Le misure di protezione vengono suddivise in tre categorie:
- categoria I: uso di conduttori di protezione. Nell‘ipotesi di guasti, la cor
dell’energia elettrica.
- categoria II: isolaziomento di protezione delle parti sotto tensione. In
questo caso non deve essere collegato un conduttore di protezione.
- categoria III:ricorso alla bassa tensione ELV. In questo caso non va
superata la Bemessungsspannung di 50 V tensione alternata o 120 V
tensione continua.
Per certi ambiti si utilizzano tensioni ancora più basse (25 V tensione
alternata o 60 V tensione continua). In tali casi una protezione per evitare
un contatto diretto non è necessaria.Rientrano in tale ambito i sistemi
di funi e cordeper lampade alogene a bassa tensione e le ferrovie di
piccole dimensioni.
La bassa tensione differisce dalla tensione di sicurezza bassa SELV
perchè non ha un collegamento a terra.
156
Azionamenti elettrici e controlli automatici
Minos
3.11.3 La compatibilità elettromagnetica EMV
La compatibilità elettromagnetica riguarda soprattutto componenti elettrici e dunque la sicurezza del servizio di apparecchi con componenti
elettroniche.
Alte tensioni elettriche di alcune decine di migliaia di volt possono nascere
tramite carica elettrostatica. Un esempio tipico sono le tensioni generate
quando si cammina su un tappetto sintetico.
I semiconduttori possono essere distrutti con tensioni molto più basse
di quelle che si generano per carica elettrostatica, pertanto tali tensioni
devono essere scaricate per contatto con dispositivi collegati a terra,
prima che vengano toccati direttamente dai semiconduttori.
Un fulmine può generare elevatissime tensioni elettriche causando danni
ingenti sia per caduta diretta nella rete d’alimentazione energetica sia per
caduta a distanza di qualche centinaia di metri. Anche in tale circostanza
infatti, si può trasmettere tensione tramite l’accoppiamento capacitivo o
induttivo.
L‘eccesso di carica viene scaricata a terra tramite scaricatori di sovratensioni, in particolare nei dispositivi da proteggere.
Questi disturbi vanno schermati alla fonte per evitare che si creino problemi per trasmissioni radiofoniche o televisive.
Gli apparecchi venduti nell’UE devono essere segnati con il segno CE
che conferma l‘unifrmità alle direttive europee.La responsabilità per tale
prescrizione è il rivenditore degli apparecchi elettrici. Fa parte delle norme
europee anche la norma EVM.
157
Minos
158
Azionamenti elettrici e controlli automatici