Convertitori da incasso
___________________
Prefazione
1
___________________
Avvertenze di sicurezza
SINAMICS
SINAMICS G130
Convertitori da incasso
2
___________________
Panoramica degli apparecchi
3
___________________
Installazione meccanica
4
___________________
Installazione elettrica
5
___________________
Messa in servizio
Istruzioni operative
6
___________________
Comando
Canale del valore di
7
___________________
riferimento e regolazione
8
___________________
Morsetti di uscita
Funzioni, funzioni di
sorveglianza e funzioni di
protezione
9
___________
Diagnostica / Anomalie e
10
___________________
avvisi
11
___________________
Manutenzione e riparazione
12
___________________
Dati tecnici
A
___________________
Appendice
Versione regolazione V4.7
04/2014
A5E00386872A
Avvertenze di legge
Concetto di segnaletica di avvertimento
Questo manuale contiene delle norme di sicurezza che devono essere rispettate per salvaguardare l'incolumità
personale e per evitare danni materiali. Le indicazioni da rispettare per garantire la sicurezza personale sono
evidenziate da un simbolo a forma di triangolo mentre quelle per evitare danni materiali non sono precedute dal
triangolo. Gli avvisi di pericolo sono rappresentati come segue e segnalano in ordine descrescente i diversi livelli
di rischio.
PERICOLO
questo simbolo indica che la mancata osservanza delle opportune misure di sicurezza provoca la morte o gravi
lesioni fisiche.
AVVERTENZA
il simbolo indica che la mancata osservanza delle relative misure di sicurezza può causare la morte o gravi
lesioni fisiche.
CAUTELA
indica che la mancata osservanza delle relative misure di sicurezza può causare lesioni fisiche non gravi.
ATTENZIONE
indica che la mancata osservanza delle relative misure di sicurezza può causare danni materiali.
Nel caso in cui ci siano più livelli di rischio l'avviso di pericolo segnala sempre quello più elevato. Se in un avviso
di pericolo si richiama l'attenzione con il triangolo sul rischio di lesioni alle persone, può anche essere
contemporaneamente segnalato il rischio di possibili danni materiali.
Personale qualificato
Il prodotto/sistema oggetto di questa documentazione può essere adoperato solo da personale qualificato per il
rispettivo compito assegnato nel rispetto della documentazione relativa al compito, specialmente delle avvertenze
di sicurezza e delle precauzioni in essa contenute. Il personale qualificato, in virtù della sua formazione ed
esperienza, è in grado di riconoscere i rischi legati all'impiego di questi prodotti/sistemi e di evitare possibili
pericoli.
Uso conforme alle prescrizioni di prodotti Siemens
Si prega di tener presente quanto segue:
AVVERTENZA
I prodotti Siemens devono essere utilizzati solo per i casi d’impiego previsti nel catalogo e nella rispettiva
documentazione tecnica. Qualora vengano impiegati prodotti o componenti di terzi, questi devono essere
consigliati oppure approvati da Siemens. Il funzionamento corretto e sicuro dei prodotti presuppone un trasporto,
un magazzinaggio, un’installazione, un montaggio, una messa in servizio, un utilizzo e una manutenzione
appropriati e a regola d’arte. Devono essere rispettate le condizioni ambientali consentite. Devono essere
osservate le avvertenze contenute nella rispettiva documentazione.
Marchio di prodotto
Tutti i nomi di prodotto contrassegnati con ® sono marchi registrati della Siemens AG. Gli altri nomi di prodotto
citati in questo manuale possono essere dei marchi il cui utilizzo da parte di terzi per i propri scopi può violare i
diritti dei proprietari.
Esclusione di responsabilità
Abbiamo controllato che il contenuto di questa documentazione corrisponda all'hardware e al software descritti.
Non potendo comunque escludere eventuali differenze, non possiamo garantire una concordanza perfetta. Il
contenuto di questa documentazione viene tuttavia verificato periodicamente e le eventuali correzioni o modifiche
vengono inserite nelle successive edizioni.
Siemens AG
Industry Sector
Postfach 48 48
90026 NÜRNBERG
GERMANIA
A5E00386872A
Ⓟ 08/2014 Con riserva di modifiche
Copyright © Siemens AG 2004 - 2014.
Tutti i diritti riservati
Prefazione
Struttura della documentazione
La documentazione cliente è composta dalle seguenti pubblicazioni:
● Istruzioni operative del convertitore
Le istruzioni operative comprendono le seguenti sezioni:
– Descrizione dell'apparecchiatura
– Installazione meccanica
– Installazione elettrica
– Manuale per la messa in servizio
– Descrizione delle funzioni
– Avvertenze per la manutenzione
– Dati tecnici
● Istruzioni operative per componenti di sistema aggiuntivi
– AOP30
– BOP20
– Filtri di rete
– Bobine di rete
– Braking Module e resistenze di frenatura
– Bobine motore
– Filtro sinusoidale
– Filtro du/dt più VPL
– Filtro du/dt compatto con VPL
– TB30
– VSM10
– TM150
– Costruzione del quadro elettrico e EMC
– Line Harmonics Filter
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
5
Prefazione
● Manuale delle liste
Il manuale delle liste è suddiviso nelle seguenti parti:
– Lista dei parametri
– Schemi logici
– Elenco anomalie e avvisi
● Documentazione su Drive Control Chart (DCC)
– Manuale di programmazione e d'uso: Descrizione dell'editor DCC
– Manuale di guida alle funzioni: Descrizione dei blocchi standard DCC
Documentazione in Internet
La documentazione relativa a SINAMICS G130 è disponibile in Internet all'indirizzo:
http://support.automation.siemens.com/WW/view/en/18530149/133300
Technical Support
Per informazioni rivolgersi alla seguente hotline:
Fuso orario Europa / Africa
Telefono
+49 (0) 911 895 7222
Fax
+49 (0) 911 895 7223
Internet
http://www.siemens.com/automation/support-request
Telefono
+1 423 262 2522
Fax
+1 423 262 2200
Internet
[email protected]
Fuso orario America
Fuso orario Asia / Pacifico
Telefono
+86 1064 757 575
Fax
+86 1064 747 474
Internet
[email protected]
Pezzi di ricambio
Per i pezzi di ricambio vedere in Internet all'indirizzo:
http://support.automation.siemens.com/WW/view/de/16612315
Indirizzo Internet
Informazioni sempre aggiornate sui prodotti SINAMICS sono reperibili in Internet al seguente
indirizzo:
http://www.siemens.com/sinamics
Convertitori da incasso
6
Istruzioni operative, 04/2014, A5E00386872A
Prefazione
Valori limite EMC per la Corea del Sud
I valori limite EMC da rispettare per la Corea corrispondono a quelli della direttiva EMC per
gli azionamenti elettrici a velocità variabile EN 61800-3 della categoria C2 o alla classe di
valori limite A, gruppo 1 secondo EN 55011.
Con misure supplementari appropriate vengono rispettati i valori limite della categoria C2 o
della classe di valori limite A, gruppo 1. A questo scopo si devono prevedere ulteriori
accorgimenti, come l'impiego di un filtro antiradiodisturbi supplementare (filtro EMC).
In questo manuale e nel "Manuale di progettazione SINAMICS - Low Voltage" sono inoltre
descritte nei dettagli le misure che devono essere adottate per una configurazione
dell'impianto conforme ai requisiti EMC.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
7
Prefazione
Convertitori da incasso
8
Istruzioni operative, 04/2014, A5E00386872A
Indice del contenuto
Prefazione .............................................................................................................................................. 5
1
2
3
4
Avvertenze di sicurezza ........................................................................................................................ 17
1.1
Avvertenze di sicurezza generali .................................................................................................17
1.2
Avvertenze di sicurezza relative ai campi elettromagnetici (EMF) ..............................................20
1.3
Manipolazione di componenti sensibili alle scariche elettrostatiche (ESD) .................................21
1.4
Industrial Security.........................................................................................................................22
1.5
Rischi residui di sistemi di azionamento (Power Drive System) ..................................................23
Panoramica degli apparecchi ................................................................................................................ 25
2.1
Contenuto del capitolo .................................................................................................................25
2.2
Panoramica degli apparecchi da incasso ....................................................................................26
2.3
Panoramica dei Power Module ....................................................................................................27
2.4
2.4.1
2.4.2
Campo di impiego, caratteristiche................................................................................................28
Campo di impiego ........................................................................................................................28
Caratteristiche, qualità, service ....................................................................................................28
2.5
Principio circuitale ........................................................................................................................30
2.6
Targhetta ......................................................................................................................................31
Installazione meccanica ........................................................................................................................ 33
3.1
Contenuto del capitolo .................................................................................................................33
3.2
Trasporto, immagazzinaggio........................................................................................................33
3.3
3.3.1
3.3.2
3.3.3
Montaggio ....................................................................................................................................35
Requisiti per il luogo di installazione ............................................................................................35
Disimballaggio ..............................................................................................................................36
Attrezzi necessari .........................................................................................................................36
3.4
3.4.1
Power Module ..............................................................................................................................37
Disegni quotati .............................................................................................................................38
3.5
Control Unit CU320-2 ...................................................................................................................42
3.6
Terminal Module TM31 ................................................................................................................43
3.7
Sensor Module SMC30 ................................................................................................................45
Installazione elettrica............................................................................................................................. 47
4.1
Contenuto del capitolo .................................................................................................................47
4.2
Preparativi ....................................................................................................................................47
4.3
Importanti misure di sicurezza .....................................................................................................48
4.4
Introduzione all'EMC ....................................................................................................................49
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
9
Indice del contenuto
5
4.5
Installazione in conformità EMC ................................................................................................. 51
4.6
Schema dei collegamenti ............................................................................................................ 54
4.7
4.7.1
4.7.2
4.7.3
4.7.4
4.7.5
4.7.6
Collegamenti di potenza.............................................................................................................. 58
Capicorda .................................................................................................................................... 59
Sezioni di collegamento, lunghezze dei conduttori ..................................................................... 60
Collegamento dei cavi del motore e dei cavi di rete ................................................................... 61
DCPS, DCNS – Collegamento per un filtro du/dt con Voltage Peak Limiter .............................. 62
Adattamento della tensione del ventilatore ................................................................................. 62
Rimozione della staffa di collegamento dall'unità antidisturbi per il funzionamento in rete
senza messa a terra (rete IT) ...................................................................................................... 64
4.8
Alimentazione DC 24 V esterna .................................................................................................. 69
4.9
Schema di cablaggio DRIVE-CLiQ ............................................................................................. 70
4.10
4.10.1
4.10.2
4.10.3
4.10.4
4.10.5
4.10.5.1
4.10.5.2
4.10.5.3
4.10.6
Collegamenti dei segnali ............................................................................................................. 71
Power Module ............................................................................................................................. 71
Control Unit CU320-2 DP ............................................................................................................ 75
Control Unit CU320-2 PN ............................................................................................................ 91
Terminal Module TM31 ............................................................................................................. 104
Sensor Module Cabinet-Mounted SMC30 ................................................................................ 114
Descrizione................................................................................................................................ 114
Collegamento ............................................................................................................................ 118
Esempi di collegamento ............................................................................................................ 123
Terminal Module TM54F ........................................................................................................... 124
Messa in servizio .................................................................................................................................125
5.1
Contenuto del capitolo .............................................................................................................. 125
5.2
5.2.1
5.2.2
Tool di messa in servizio STARTER ......................................................................................... 126
Installazione di STARTER......................................................................................................... 128
Descrizione della superficie operativa di STARTER ................................................................. 129
5.3
5.3.1
5.3.2
5.3.3
5.3.4
Sequenza di messa in servizio con STARTER ......................................................................... 130
Creazione di un progetto ........................................................................................................... 130
Configurazione di un apparecchio di azionamento ................................................................... 138
Trasferimento del progetto di azionamento .............................................................................. 162
Messa in servizio con STARTER via Ethernet.......................................................................... 165
5.4
Pannello operativo AOP30 ........................................................................................................ 171
5.5
5.5.1
5.5.2
Prima messa in servizio con l'AOP30 ....................................................................................... 172
Primo avviamento ..................................................................................................................... 172
Messa in servizio di base .......................................................................................................... 174
5.6
Condizione dopo la messa in servizio ....................................................................................... 183
5.7
Messa in servizio di un encoder con fattore di riduzione .......................................................... 184
5.8
Ripristino dei parametri all'impostazione di fabbrica ................................................................. 184
Convertitori da incasso
10
Istruzioni operative, 04/2014, A5E00386872A
Indice del contenuto
6
Comando ............................................................................................................................................ 187
6.1
Contenuto del capitolo ...............................................................................................................187
6.2
Informazioni generali sulle sorgenti dei comandi e di riferimento ..............................................188
6.3
6.3.1
6.3.2
6.3.3
6.3.4
6.3.5
Principi del sistema di azionamento...........................................................................................189
Parametro ..................................................................................................................................189
Oggetti di azionamento (Drive Objects) .....................................................................................192
Record di dati .............................................................................................................................193
Tecnica BICO: interconnessione di segnali ...............................................................................199
Propagazione di anomalie .........................................................................................................204
6.4
6.4.1
6.4.2
6.4.3
6.4.4
Sorgenti dei comandi .................................................................................................................205
Preimpostazione "PROFIdrive" ..................................................................................................205
Preimpostazione "Morsetti TM31"..............................................................................................207
Preimpostazione "Morsetti CU" ..................................................................................................209
Preimpostazione "PROFIdrive+TM31" ......................................................................................211
6.5
6.5.1
6.5.2
6.5.3
Sorgenti del valore di riferimento ...............................................................................................213
Ingressi analogici .......................................................................................................................213
Potenziometro motore ................................................................................................................215
Valori di riferimento fissi per numero di giri ................................................................................216
6.6
6.6.1
6.6.2
6.6.3
6.6.3.1
6.6.3.2
6.6.3.3
6.6.3.4
6.6.4
6.6.4.1
6.6.4.2
6.6.4.3
6.6.4.4
6.6.5
Comunicazione secondo PROFIdrive ........................................................................................218
Informazioni generali ..................................................................................................................218
Classi di applicazioni ..................................................................................................................220
Comunicazione ciclica ...............................................................................................................225
Telegrammi e dati di processo ...................................................................................................225
Struttura dei telegrammi .............................................................................................................228
Panoramica delle parole di comando e dei valori di riferimento ................................................228
Panoramica delle parole di stato e dei valori attuali ..................................................................229
Comunicazione aciclica .............................................................................................................229
Struttura dei job e delle risposte ................................................................................................231
Determinazione del numero di oggetti di azionamento..............................................................237
Esempio 1: Lettura di parametri .................................................................................................237
Esempio 2: scrittura di parametri (job multiparametro) ..............................................................239
Ulteriori informazioni sulla comunicazione secondo PROFIdrive ..............................................243
6.7
6.7.1
6.7.2
6.7.3
6.7.4
Comunicazione mediante PROFIBUS DP .................................................................................243
Collegamento Profibus ...............................................................................................................243
Controllo tramite PROFIBUS .....................................................................................................243
Sorveglianza anomalia telegramma ..........................................................................................244
Ulteriori informazioni sulla comunicazione tramite PROFIBUS DP ...........................................245
6.8
6.8.1
6.8.2
6.8.3
6.8.3.1
6.8.3.2
6.8.3.3
6.8.3.4
6.8.3.5
6.8.4
6.8.4.1
Comunicazione tramite PROFINET IO ......................................................................................246
Communication Board Ethernet CBE20 ....................................................................................246
Attivazione del funzionamento online: STARTER tramite PROFINET IO .................................248
Generalità su PROFINET IO ......................................................................................................252
Informazioni generali su PROFINET IO in SINAMICS ..............................................................252
Comunicazione in tempo reale (RT) e comunicazione in tempo reale isocrona (IRT) ..............253
Indirizzi .......................................................................................................................................254
Trasmissione dati .......................................................................................................................256
Canali di comunicazione ............................................................................................................257
PROFIenergy .............................................................................................................................258
Descrizione ................................................................................................................................258
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
11
Indice del contenuto
7
6.8.4.2
6.8.4.3
6.8.4.4
6.8.4.5
6.8.4.6
6.8.4.7
6.8.4.8
6.8.4.9
6.8.4.10
6.8.5
Compiti di PROFIenergy ........................................................................................................... 260
PROFIenergy - Proprietà del sistema di azionamento ............................................................. 261
Comandi PROFIenergy ............................................................................................................. 261
Valori di misura PROFIenergy .................................................................................................. 262
Modo risparmio energetico PROFIenergy ................................................................................ 263
Passaggio al modo risparmio energetico dallo stato PROFIdrive di esercizio (S4) ................. 263
Blocco di PROFIenergy ............................................................................................................. 263
Applicazioni PROFIenergy ........................................................................................................ 263
Schemi logici e parametri .......................................................................................................... 264
Ulteriori informazioni sulla comunicazione tramite PROFINET IO............................................ 264
6.9
6.9.1
6.9.2
6.9.3
6.9.4
6.9.5
6.9.6
6.9.7
Comunicazione tramite SINAMICS Link ................................................................................... 265
Principi fondamentali di SINAMICS Link ................................................................................... 265
Topologia................................................................................................................................... 267
Progettazione e messa in servizio ............................................................................................ 268
Esempio .................................................................................................................................... 272
Interruzione della comunicazione nell'avviamento o nel funzionamento ciclico ....................... 274
Tempi di trasmissione per SINAMICS Link ............................................................................... 275
Schemi logici e parametri .......................................................................................................... 276
6.10
Servizi di comunicazione e numeri di porta utilizzati ................................................................ 276
6.11
Funzionamento in parallelo delle interfacce di comunicazione................................................. 279
6.12
Engineering Software Drive Control Chart (DCC)..................................................................... 282
Canale del valore di riferimento e regolazione ......................................................................................283
7.1
Contenuto del capitolo .............................................................................................................. 283
7.2
7.2.1
7.2.2
7.2.3
7.2.4
7.2.5
Canale del valore di riferimento ................................................................................................ 284
Addizione del valore di riferimento ............................................................................................ 284
Inversione di direzione .............................................................................................................. 285
Bande di arresto, numero di giri minimo ................................................................................... 286
Limitazione del numero di giri ................................................................................................... 287
Generatore di rampa ................................................................................................................. 288
7.3
7.3.1
7.3.2
7.3.3
Controllo V/f .............................................................................................................................. 292
Aumento di tensione ................................................................................................................. 295
Smorzamento risonanza ........................................................................................................... 298
Compensazione dello scorrimento ............................................................................................ 299
7.4
7.4.1
7.4.2
7.4.3
7.4.4
7.4.4.1
Regolazione vettoriale di numero di giri/coppia con/senza encoder ........................................ 301
Regolazione vettoriale senza encoder ...................................................................................... 302
Regolazione vettoriale con encoder .......................................................................................... 309
Filtro del valore attuale del numero di giri ................................................................................. 310
Regolatore del numero di giri .................................................................................................... 311
Precomando del regolatore del numero di giri (precomando integrato con
simmetrizzazione) ..................................................................................................................... 314
Modello di riferimento ................................................................................................................ 317
Adattamento del regolatore del numero di giri .......................................................................... 318
Statica ....................................................................................................................................... 320
Valore attuale del numero di giri aperto .................................................................................... 321
Regolazione della coppia .......................................................................................................... 323
Limitazione di coppia ................................................................................................................. 326
Filtro del valore di riferimento di corrente .................................................................................. 327
Motori sincroni ad eccitazione permanente .............................................................................. 328
7.4.4.2
7.4.4.3
7.4.4.4
7.4.4.5
7.4.5
7.4.6
7.4.7
7.4.8
Convertitori da incasso
12
Istruzioni operative, 04/2014, A5E00386872A
Indice del contenuto
8
9
Morsetti di uscita ................................................................................................................................. 333
8.1
Contenuto del capitolo ...............................................................................................................333
8.2
8.2.1
Uscite analogiche TM31 ............................................................................................................334
Lista dei segnali per i segnali analogici .....................................................................................335
8.3
Uscite digitali TM31 ....................................................................................................................338
Funzioni, funzioni di sorveglianza e funzioni di protezione ................................................................... 341
9.1
Contenuto del capitolo ...............................................................................................................341
9.2
9.2.1
Funzioni dell'azionamento..........................................................................................................342
Identificazione dei dati del motore e ottimizzazione automatica del regolatore del numero
di giri ...........................................................................................................................................342
Identificazione dati del motore ...................................................................................................343
Misura rotante e ottimizzazione del regolatore del numero di giri .............................................346
Misura rotante abbreviata ..........................................................................................................348
Parametri ....................................................................................................................................349
Ottimizzazione del rendimento...................................................................................................349
Magnetizzazione rapida nei motori asincroni .............................................................................351
Regolazione Vdc ........................................................................................................................353
Riaccensione automatica (WEA) ...............................................................................................358
Avvio al volo ...............................................................................................................................361
Riavviamento al volo senza encoder .........................................................................................362
Avvio al volo con encoder ..........................................................................................................365
Parametro ..................................................................................................................................366
Commutazione motore ...............................................................................................................367
Descrizione ................................................................................................................................367
Esempio di commutazione motore di due motori.......................................................................367
Schema logico............................................................................................................................368
Parametro ..................................................................................................................................369
Caratteristica di attrito ................................................................................................................369
Frenatura mediante cortocircuito dell'indotto, frenatura in corrente continua............................371
Informazioni generali ..................................................................................................................371
Frenatura esterna mediante cortocircuito dell'indotto ................................................................371
Frenatura interna mediante cortocircuito dell'indotto .................................................................373
Frenatura in corrente continua ...................................................................................................374
Aumento della frequenza di uscita .............................................................................................376
Descrizione ................................................................................................................................376
Frequenze degli impulsi preimpostate .......................................................................................377
Aumento della frequenza impulsi ...............................................................................................377
Frequenza di uscita massima all'aumento della frequenza degli impulsi ..................................378
Parametro ..................................................................................................................................378
Comportamento di derating in presenza di elevata frequenza impulsi ......................................379
Vobulazione di frequenza degli impulsi .....................................................................................380
Tempo di esecuzione (contatore ore d'esercizio) ......................................................................382
Modalità simulazione .................................................................................................................383
Inversione di direzione ...............................................................................................................385
Commutazione di unità ..............................................................................................................386
Comando freni semplice ............................................................................................................388
Sincronizzazione ........................................................................................................................390
Visualizzazione del risparmio di energia per macchine fluidodinamiche ...................................392
Protezione in scrittura ................................................................................................................395
9.2.1.1
9.2.1.2
9.2.1.3
9.2.1.4
9.2.2
9.2.3
9.2.4
9.2.5
9.2.6
9.2.6.1
9.2.6.2
9.2.6.3
9.2.7
9.2.7.1
9.2.7.2
9.2.7.3
9.2.7.4
9.2.8
9.2.9
9.2.9.1
9.2.9.2
9.2.9.3
9.2.9.4
9.2.10
9.2.10.1
9.2.10.2
9.2.10.3
9.2.10.4
9.2.10.5
9.2.11
9.2.12
9.2.13
9.2.14
9.2.15
9.2.16
9.2.17
9.2.18
9.2.19
9.2.20
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
13
Indice del contenuto
9.2.21
9.2.21.1
9.2.21.2
9.2.21.3
9.2.21.4
9.2.21.5
9.2.21.6
9.2.21.7
9.2.21.8
9.2.22
9.2.23
9.2.23.1
9.2.23.2
9.2.23.3
9.2.23.4
9.2.23.5
Protezione know-how ................................................................................................................ 397
Descrizione................................................................................................................................ 397
Attivazione della protezione know-how ..................................................................................... 399
Disattivazione della protezione know-how ................................................................................ 400
Modifica della protezione know-how ......................................................................................... 401
Lista eccezioni OEM ................................................................................................................. 401
Protezione contro la copia della scheda di memoria ................................................................ 402
Sostituzione di parti di ricambio con protezione know-how e protezione contro la copia
associata ................................................................................................................................... 402
Panoramica dei parametri importanti ........................................................................................ 403
Funzionamento di emergenza .................................................................................................. 404
Server web ................................................................................................................................ 407
Descrizione................................................................................................................................ 407
Avvio del server web ................................................................................................................. 409
Configurazione del server web ................................................................................................. 411
Aree di visualizzazione.............................................................................................................. 412
Panoramica dei parametri importanti ........................................................................................ 414
9.3
9.3.1
9.3.2
9.3.2.1
9.3.2.2
9.3.2.3
9.3.2.4
9.3.2.5
9.3.3
9.3.4
Funzioni di ampliamento ........................................................................................................... 414
Regolatore di tecnologia ........................................................................................................... 414
Funzione bypass ....................................................................................................................... 417
Bypass con sincronizzazione e sovrapposizione (p1260 = 1) .................................................. 418
Bypass con sincronizzazione senza sovrapposizione (p1260 = 2) .......................................... 420
Bypass senza sincronizzazione (p1260 = 3) ............................................................................ 422
Schema logico ........................................................................................................................... 424
Parametro.................................................................................................................................. 425
Comando freni esteso ............................................................................................................... 426
Funzioni di sorveglianza estese ................................................................................................ 430
9.4
9.4.1
9.4.2
9.4.3
9.4.4
9.4.5
9.4.5.1
9.4.5.2
9.4.5.3
9.4.5.4
9.4.5.5
9.4.5.6
9.4.5.7
9.4.5.8
9.4.6
9.4.6.1
9.4.6.2
9.4.6.3
9.4.6.4
9.4.6.5
9.4.6.6
9.4.6.7
Funzioni di sorveglianza e di protezione ................................................................................... 433
Protezione generale delle parti di potenza................................................................................ 433
Sorveglianze termiche e reazioni ai sovraccarichi .................................................................... 434
Protezione contro il blocco ........................................................................................................ 436
Protezione contro lo stallo (solo con regolazione vettoriale) .................................................... 437
Protezione termica del motore .................................................................................................. 438
Descrizione................................................................................................................................ 438
Collegamento del sensore di temperatura alla morsettiera utente TM31 ................................. 438
Collegamento del sensore di temperatura su un Sensor Module ............................................. 439
Collegamento del sensore di temperatura direttamente sul Control Interface Module............. 439
Valutazione del sensore di temperatura ................................................................................... 440
Modelli termici del motore ......................................................................................................... 441
Schema logico ........................................................................................................................... 442
Parametri ................................................................................................................................... 442
Rilevamento della temperatura tramite TM150 ......................................................................... 444
Descrizione................................................................................................................................ 444
Misura con max. 6 canali .......................................................................................................... 445
Misura con max. 12 canali ........................................................................................................ 446
Formazione di gruppi di sensori di temperatura........................................................................ 446
Valutazione dei canali di temperatura ....................................................................................... 447
Schema logico ........................................................................................................................... 448
Parametri ................................................................................................................................... 448
Convertitori da incasso
14
Istruzioni operative, 04/2014, A5E00386872A
Indice del contenuto
10
11
12
Diagnostica / Anomalie e avvisi ........................................................................................................... 451
10.1
Contenuto del capitolo ...............................................................................................................451
10.2
10.2.1
10.2.2
10.2.3
Diagnostica ................................................................................................................................452
Diagnostica tramite LED ............................................................................................................452
Diagnostica tramite parametri ....................................................................................................458
Visualizzazione ed eliminazione degli errori ..............................................................................462
10.3
Panoramica delle anomalie e degli avvisi ..................................................................................463
Manutenzione e riparazione ................................................................................................................ 465
11.1
Contenuto del capitolo ...............................................................................................................465
11.2
11.2.1
Manutenzione.............................................................................................................................466
Pulizia .........................................................................................................................................466
11.3
11.3.1
11.3.2
11.3.3
Manutenzione preventiva ...........................................................................................................467
Manutenzione preventiva ...........................................................................................................467
Telaio di montaggio ....................................................................................................................469
Trasporto dei Powerblock tramite i fori per il sollevamento .......................................................470
11.4
11.4.1
11.4.2
11.4.3
11.4.4
11.4.5
11.4.6
11.4.7
11.4.8
11.4.9
11.4.10
11.4.11
11.4.12
Sostituzione di componenti ........................................................................................................472
Sostituzione del Control Interface Module, grandezza costruttiva FX .......................................473
Sostituzione del Control Interface Module, grandezza costruttiva GX ......................................475
Sostituzione del Control Interface Module, grandezza costruttiva HX.......................................477
Sostituzione del Control Interface Module, grandezza costruttiva JX .......................................479
Sostituzione del Powerblock, grandezza costruttiva FX ............................................................481
Sostituzione del Powerblock, grandezza costruttiva GX ...........................................................484
Sostituzione del Powerblock, grandezza costruttiva HX ...........................................................487
Sostituzione del Powerblock, grandezza costruttiva JX ............................................................492
Sostituzione del ventilatore, grandezza costruttiva FX ..............................................................497
Sostituzione del ventilatore, grandezza costruttiva GX .............................................................499
Sostituzione del ventilatore, grandezza costruttiva HX..............................................................501
Sostituzione del ventilatore, grandezza costruttiva JX ..............................................................505
11.5
Forming dei condensatori del circuito intermedio ......................................................................509
11.6
Segnalazioni dopo la sostituzione di componenti DRIVE-CLiQ ................................................510
11.7
L’aggiornamento del firmware dell’apparecchio ........................................................................511
Dati tecnici .......................................................................................................................................... 513
12.1
Contenuto del capitolo ...............................................................................................................513
12.2
12.2.1
12.2.1.1
12.2.1.2
12.2.1.3
12.2.2
Dati generali ...............................................................................................................................514
Dati di derating ...........................................................................................................................515
Derating di corrente in funzione della temperatura ambiente ....................................................515
Altitudini di installazione superiori a 2000 m ... 5000 m s.l.m. ...................................................516
Derating di corrente in funzione della frequenza impulsi ...........................................................517
Sovraccaricabilità .......................................................................................................................519
12.3
12.3.1
12.3.2
12.3.3
12.3.4
Dati tecnici..................................................................................................................................520
Power Module ............................................................................................................................521
Control Unit CU320-2 DP e CU320-2 PN ..................................................................................543
Terminal Module TM31 ..............................................................................................................544
Sensor Module SMC30 ..............................................................................................................545
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
15
Indice del contenuto
A
Appendice............................................................................................................................................547
A.1
Indice delle abbreviazioni .......................................................................................................... 547
A.2
Macro dei parametri .................................................................................................................. 549
Indice analitico .....................................................................................................................................561
Convertitori da incasso
16
Istruzioni operative, 04/2014, A5E00386872A
Avvertenze di sicurezza
1.1
1
Avvertenze di sicurezza generali
PERICOLO
Pericolo di morte per contatto con parti sotto tensione e altre fonti di energia
Il contatto con parti sotto tensione può provocare la morte o lesioni gravi.
• Eseguire gli interventi sugli apparecchi elettrici solo se si è in possesso delle adeguate
qualifiche.
• Per qualsiasi intervento sugli apparecchi, rispettare le regole di sicurezza specifiche dei
vari Paesi.
Come regola generale, al fine di garantire la sicurezza devono essere eseguite le seguenti
sei operazioni:
1. Predisporre la disinserzione e informare tutte le persone interessate da questa
operazione.
2. Mettere la macchina fuori tensione.
– Spegnere la macchina.
– Attendere che sia trascorso il tempo di scarica indicato sulle targhette di avviso.
– Accertarsi che non vi sia tensione tra conduttore e conduttore e tra conduttore e
conduttore di protezione.
– Verificare che gli eventuali circuiti di tensione ausiliaria siano privi di tensione.
– Accertarsi che i motori non possano muoversi.
3. Identificare tutte le altre fonti di energia pericolose, come ad es. aria compressa, forza
idraulica o acqua.
4. Isolare o neutralizzare tutte le fonti di energia pericolose, ad es. chiudendo gli interruttori
o le valvole, stabilendo un collegamento a terra o un cortocircuito.
5. Accertarsi che le fonti di energia non possano reinserirsi.
6. Accertarsi che la macchina corretta sia completamente bloccata.
Una volta conclusi gli interventi necessari, ripristinare lo stato di pronto al funzionamento
ripetendo le operazioni nella sequenza inversa.
AVVERTENZA
Pericolo di morte a causa di tensione pericolosa in caso di collegamento di alimentatori di
corrente non adatti
Il contatto con parti sotto tensione può provocare la morte o gravi lesioni.
• Per tutti i connettori e i morsetti dei gruppi elettronici utilizzare solo alimentatori che
forniscono tensioni di uscita SELV (Safety Extra Low Voltage) o PELV (Protective Extra
Low Voltage).
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
17
Avvertenze di sicurezza
1.1 Avvertenze di sicurezza generali
AVVERTENZA
Pericolo di morte per contatto con parti sotto tensione in caso di apparecchiature
danneggiate
L'uso improprio delle apparecchiature può provocare danni.
In caso di apparecchiature danneggiate possono essere presenti tensioni elevate sulla
custodia o su componenti aperti, il cui contatto può provocare lesioni gravi o la morte.
• Durante il trasporto, il magazzinaggio e il funzionamento rispettare i valori limite
specificati nei dati tecnici.
• Non utilizzare apparecchiature danneggiate.
AVVERTENZA
Pericolo di morte per folgorazione in caso di schermature non posate
Il sovraccoppiamento capacitivo può generare tensioni di contatto pericolose in caso di
schermature non posate.
• Collegare almeno su un lato al potenziale di terra della custodia le maglie di
schermatura e i fili non utilizzati dei cavi di potenza.
AVVERTENZA
Pericolo di morte per folgorazione in caso di mancanza di messa a terra
Se la connessione del conduttore di protezione di apparecchi della classe di protezione I
manca o è eseguita in modo errato, possono essere presenti tensioni elevate su
componenti aperti, il cui contatto può provocare la morte o gravi lesioni.
• Mettere a terra l'apparecchiatura conformemente alle norme.
AVVERTENZA
Pericolo di morte per folgorazione in caso di scollegamento dei connettori durante il
funzionamento
In caso di estrazione di connettori durante il funzionamento, possono formarsi archi voltaici
in grado di provocare la morte o gravi lesioni.
• Aprire i connettori solo in assenza di tensione, a meno che non si disponga
dell'autorizzazione esplicita ad effettuare questa operazione durante il funzionamento.
AVVERTENZA
Pericolo di morte per propagazione del fuoco in caso di custodia insufficiente
Il fuoco e lo sviluppo di fumo possono provocare gravi danni a persone e cose.
• Installare le apparecchiature prive di custodia protettiva in un armadio metallico (oppure
proteggere l'apparecchiatura con una contromisura equivalente), in modo da impedire il
contatto con il fuoco sia all'interno che all'esterno della custodia.
• Accertarsi che il fumo possa essere evacuato lungo percorsi previsti.
Convertitori da incasso
18
Istruzioni operative, 04/2014, A5E00386872A
Avvertenze di sicurezza
1.1 Avvertenze di sicurezza generali
AVVERTENZA
Pericolo di vita dovuto al movimento imprevisto delle macchine in caso di impiego di
apparecchiature radio o telefoni cellulari
Se si utilizzano apparecchiature radio mobili o telefoni cellulari con potenza di emissione
> 1 W a una distanza inferiore a circa 2 m dai componenti, sulle apparecchiature possono
prodursi interferenze in grado di compromettere la sicurezza funzionale delle macchine,
provocare lesioni personali o causare danni materiali.
• Spegnere le apparecchiature radio o i telefoni cellulari che si trovano nelle immediate
vicinanze dei componenti.
AVVERTENZA
Pericolo di morte per incendio del motore in caso di sovraccarico dell'isolamento
Un cortocircuito verso terra in una rete IT provoca un aumento del carico dell'isolamento
del motore. La conseguenza possibile è il guasto dell'isolamento con pericolo per le
persone dovuto allo sviluppo di fumo e incendio.
• Utilizzare un dispositivo di monitoraggio in grado di segnalare eventuali guasti
dell'isolamento.
• Eliminare il guasto il più rapidamente possibile per non sovraccaricare l'isolamento del
motore.
AVVERTENZA
Pericolo di morte per incendio in caso di surriscaldamento a causa di distanze di
ventilazione insufficienti
Se gli spazi liberi di ventilazione sono insufficienti, può verificarsi un surriscaldamento con
conseguente pericolo per le persone perché possono svilupparsi fumo e incendi. Le
apparecchiature e i sistemi possono inoltre avere una percentuale di guasti maggiore e una
durata di vita inferiore.
• Rispettare assolutamente le distanze minime per gli spazi liberi di ventilazione dei vari
componenti. Queste distanze sono riportate nei disegni quotati o nelle "Avvertenze di
sicurezza specifiche del prodotto" all'inizio di questo capitolo.
AVVERTENZA
Pericolo di incidenti a causa di targhette di avviso mancanti o illeggibili
Se le targhette di avviso mancano o sono illeggibili, possono verificarsi incidenti con
conseguenze fatali.
• Verificare la completezza delle targhette di avviso in base alla documentazione.
• Applicare sui componenti le opportune targhette di avviso mancanti, eventualmente
nella lingua del Paese.
• Sostituire le targhette di avviso illeggibili.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
19
Avvertenze di sicurezza
1.2 Avvertenze di sicurezza relative ai campi elettromagnetici (EMF)
ATTENZIONE
Danni all'apparecchio dovuti a prove non conformi di tensione/isolamento
Le prove di tensione/isolamento condotte in modo non conforme possono danneggiare le
apparecchiature.
• Scollegare le apparecchiature dai morsetti elettrici prima di effettuare la prova sotto
tensione o la prova di isolamento della macchina o dell'impianto dato che tutti i
convertitori e i motori sono sottoposti in fabbrica ad una prova di alta tensione. Per
questo motivo non è necessario svolgere una prova ulteriore nell'ambito della macchina
o dell'impianto.
AVVERTENZA
Pericolo di morte a causa di funzioni di sicurezza non attive
Le funzioni di sicurezza non attive o non adattate possono provocare malfunzionamenti
sulle macchine e di conseguenza lesioni gravi o la morte.
• Prima della messa in servizio leggere attentamente le informazioni nella relativa
documentazione del prodotto.
• Per le funzioni rilevanti per la sicurezza eseguire un controllo di sicurezza del sistema
completo, inclusi tutti i componenti rilevanti.
• Con un'opportuna parametrizzazione accertarsi che le funzioni di sicurezza applicate
siano applicate e adatte al compito di azionamento e di automazione specifico.
• Eseguire un test funzionale.
• Utilizzare l'impianto in modo produttivo solo dopo aver verificato l'esecuzione corretta
delle funzioni rilevanti per la sicurezza.
Nota
Avvertenze di sicurezza importanti relative alle funzioni Safety Integrated
Se si desidera utilizzare le funzioni Safety Integrated, rispettare le avvertenze di sicurezza
contenute nei manuali Safety Integrated.
1.2
Avvertenze di sicurezza relative ai campi elettromagnetici (EMF)
AVVERTENZA
Pericolo di morte derivante dai campi elettromagnetici
Durante il funzionamento di impianti elettro-energetici (come trasformatori, convertitori,
motori) vengono generati dei campi elettromagnetici (EMF).
Questi rappresentano un pericolo soprattutto per le persone portatrici di pacemaker
cardiaci o impianti che si trovano nelle immediate vicinanze dei dispositivi/dei sistemi.
• Accertarsi che la persona interessata rispetti la distanza necessaria (minimo 2 m).
Convertitori da incasso
20
Istruzioni operative, 04/2014, A5E00386872A
Avvertenze di sicurezza
1.3 Manipolazione di componenti sensibili alle scariche elettrostatiche (ESD)
1.3
Manipolazione di componenti sensibili alle scariche elettrostatiche
(ESD)
I componenti esposti a pericolo elettrostatico (ESD, Electrostatic Sensitive Device) sono
componenti singoli, circuiti integrati, unità o dispositivi che possono essere danneggiati da
campi o scariche elettrostatiche.
ATTENZIONE
Danni causati da campi elettrici o scariche elettrostatiche
I campi elettrici o le scariche elettrostatiche possono danneggiare singoli componenti,
circuiti integrati, unità o dispositivi e quindi provocare danni funzionali.
• Per l'imballaggio, l'immagazzinaggio, il trasporto e la spedizione dei componenti, delle
unità o dei dispositivi utilizzare solo l'imballaggio originale o altri materiali adatti come ad
es. gommapiuma conduttiva o pellicola di alluminio.
• Prima di toccare i componenti, le unità o i dispositivi occorre adottare uno dei seguenti
provvedimenti di messa a terra:
– Bracciale ESD
– Scarpe ESD o fascette ESD per la messa a terra nei settori ESD con pavimento
conduttivo
• Appoggiare i componenti elettronici, le unità o gli apparecchi solo su supporti conduttivi
(tavoli con rivestimento ESD, materiale espanso ESD conduttivo, sacchetti per
imballaggio ESD, contenitori di trasporto ESD).
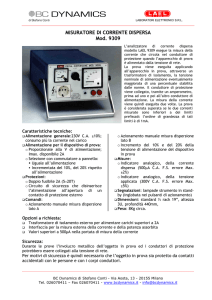
Le protezioni ESD necessarie vengono illustrate nuovamente nella figura seguente:
● a = pavimento conduttivo
● b = tavolo ESD
● c = scarpe ESD
● d = mantello ESD
● e = bracciale ESD
● f = messa a terra degli armadi elettrici
● g = collegamento con il pavimento elettricamente conduttivo
Figura 1-1
Misure protettive ESD
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
21
Avvertenze di sicurezza
1.4 Industrial Security
1.4
Industrial Security
Nota
Indicazioni di sicurezza
Siemens commercializza prodotti di automazione e di azionamento per la sicurezza
industriale che contribuiscono al funzionamento sicuro di impianti, soluzioni, macchinari,
apparecchiature e/o reti. Questi prodotti sono componenti essenziali di una concezione
globale di sicurezza industriale. In quest'ottica i prodotti Siemens sono sottoposti ad un
processo continuo di sviluppo. Consigliamo pertanto di controllare regolarmente la
disponibilità di aggiornamenti relativi ai prodotti.
Per il funzionamento sicuro di prodotti e soluzioni Siemens è necessario adottare idonee
misure di protezione (ad es. un criterio di protezione a celle) e integrare ciascun componente
in un concetto di Industrial Security globale all'avanguardia. In questo senso si devono
considerare anche gli eventuali prodotti impiegati di altri costruttori. Per maggiori
informazioni su Industrial Security, accedere a questo indirizzo
(http://www.siemens.com/industrialsecurity).
Per restare informati sugli aggiornamenti cui vengono sottoposti i nostri prodotti, suggeriamo
di iscriversi ad una newsletter specifica del prodotto. Per maggiori informazioni vedere
questo indirizzo (http://support.automation.siemens.com).
AVVERTENZA
Pericolo a causa di stati operativi non sicuri dovuti a manipolazione del software
Qualsiasi manipolazione del software (ad es. virus, trojan, malware, bug) può provocare
stati operativi non sicuri dell'impianto e di conseguenza il rischio di morte, lesioni gravi e
danni materiali.
• Mantenere aggiornato il software.
Per informazioni e newsletter in merito si possono trovare al seguente indirizzo
(http://support.automation.siemens.com).
• Integrare i componenti di automazione e azionamento in un concetto di sicurezza
industriale globale all'avanguardia dell'impianto o della macchina.
Ulteriori informazioni in merito si trovano a questo indirizzo
(http://www.siemens.com/industrialsecurity).
• Tutti i prodotti utilizzati vanno considerati nell'ottica di questo concetto di sicurezza
industriale globale.
Convertitori da incasso
22
Istruzioni operative, 04/2014, A5E00386872A
Avvertenze di sicurezza
1.5 Rischi residui di sistemi di azionamento (Power Drive System)
1.5
Rischi residui di sistemi di azionamento (Power Drive System)
I componenti per il controllo e l'azionamento di un sistema di azionamento sono omologati
per l'impiego industriale e commerciale in reti industriali. L'impiego in reti pubbliche richiede
una diversa progettazione e/o ulteriori misure.
Questi componenti possono funzionare solo all'interno di involucri chiusi o dentro quadri
elettrici sovraordinati con coperchi protettivi chiusi e congiuntamente a tutti i dispositivi di
protezione previsti.
Questi componenti possono essere manipolati solo da personale qualificato e addestrato,
che conosca e rispetti tutte le avvertenze di sicurezza riportate sui componenti e nella
relativa documentazione tecnica per l'utente.
Nell'ambito della valutazione dei rischi della macchina, da eseguire conformemente alle
prescrizioni locali (ad es. Direttiva Macchine CE), il costruttore della macchina deve
considerare i seguenti rischi residui derivanti dai componenti impiegati per il controllo e
l'azionamento di un sistema di azionamento:
1. Movimenti indesiderati di parti della macchina motorizzate durante la messa in servizio, il
funzionamento, la manutenzione e la riparazione, dovuti ad esempio a
– Errori hardware e/o software nei sensori, nel controllo, negli attuatori e nella tecnica di
collegamento
– Tempi di reazione del controllo e dell'azionamento
– Funzionamento e/o condizioni ambientali fuori specifica
– Condensa / imbrattamenti conduttivi
– Errori durante la parametrizzazione, la programmazione, il cablaggio e il montaggio
– Utilizzo di apparecchiature radio / telefoni cellulari nelle immediate vicinanze del
controllo
– Influenze esterne / danneggiamenti
2. In caso di errore, all'interno e all'esterno del convertitore possono prodursi temperature
eccezionalmente elevate, nonché fiamme vive, bagliori, rumori, particelle e gas, dovuti ad
esempio a:
– Guasto a componenti
– Errore software
– Funzionamento e/o condizioni ambientali fuori specifica
– Influenze esterne / danneggiamenti
I convertitori con grado di protezione Type / IP20 devono essere installati in un quadro
elettrico in metallo (oppure essere protetti con un altro provvedimento equivalente) in
modo tale da impedire il contatto con il fuoco all'interno e all'esterno del convertitore.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
23
Avvertenze di sicurezza
1.5 Rischi residui di sistemi di azionamento (Power Drive System)
3. Tensioni di contatto pericolose, ad esempio dovute a
– Guasto a componenti
– Influenza in caso di cariche elettrostatiche
– Induzione di tensioni con motori in movimento
– Funzionamento e/o condizioni ambientali fuori specifica
– Condensa / imbrattamenti conduttivi
– Influenze esterne / danneggiamenti
4. Campi elettrici, magnetici ed elettromagnetici in condizioni di esercizio che, ad esempio,
possono essere pericolosi per portatori di pacemaker, impianti od oggetti metallici in caso
di distanza insufficiente
5. Rilascio di sostanze ed emissioni dannose per l'ambiente in caso di utilizzo non
appropriato e/o smaltimento non corretto dei componenti
Nota
I componenti vanno protetti dagli imbrattamenti conduttivi, ad es. tramite il montaggio in un
quadro elettrico con grado di protezione IP54 secondo IEC 60529 risp. NEMA 12.
Qualora sia possibile escludere la formazione di imbrattamenti conduttivi nel luogo di
installazione, è consentito anche un grado di protezione inferiore del quadro elettrico.
Per ulteriori informazioni sui rischi residui derivanti dai componenti di un sistema di
azionamento, consultare la Documentazione tecnica per l'utente ai capitoli relativi.
Convertitori da incasso
24
Istruzioni operative, 04/2014, A5E00386872A
Panoramica degli apparecchi
2.1
2
Contenuto del capitolo
Questo capitolo descrive:
● La presentazione degli apparecchi da incasso
● I componenti e le caratteristiche principali degli apparecchi da incasso
● Lo schema circuitale degli apparecchi da incasso
● Spiegazione della targhetta dei dati tecnici
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
25
Panoramica degli apparecchi
2.2 Panoramica degli apparecchi da incasso
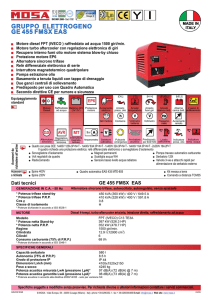
2.2
Panoramica degli apparecchi da incasso
Figura 2-1
Panoramica degli apparecchi da incasso
Convertitori da incasso
26
Istruzioni operative, 04/2014, A5E00386872A
Panoramica degli apparecchi
2.3 Panoramica dei Power Module
2.3
Panoramica dei Power Module
Figura 2-2
Panoramica dei Power Module
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
27
Panoramica degli apparecchi
2.4 Campo di impiego, caratteristiche
2.4
Campo di impiego, caratteristiche
2.4.1
Campo di impiego
Gli apparecchi da incasso SINAMICS G130 sono stati concepiti e sviluppati specificamente
per azionamenti a velocità variabile con caratteristica di carico quadratica o lineare, con
requisiti di performance intermedi e senza alimentazione di recupero dalla rete.
Gli apparecchi da incasso SINAMICS G130 offrono quindi una soluzione di azionamento
conveniente, adatta all'impiego industriale in tutti i casi in cui sia necessario muovere,
trasportare, pompare, addensare o aspirare sostanze solide, liquide o gassose.
2.4.2
Caratteristiche, qualità, service
Caratteristiche
Gli apparecchi da incasso SINAMICS G130 consentono di gestire facilmente l'azionamento,
dalla fase di progettazione a quella di esercizio, grazie ai seguenti fattori:
● struttura compatta e modulare con una facilità di manutenzione ottimale,
● progettazione senza problemi, grazie al supporto dei tool SIZER e STARTER.
● un semplice montaggio, dato che l’apparecchio viene fornito già pronto per
l’allacciamento,
● una messa in servizio rapida e di semplice attuazione, mediante guida di menu specifica
e procedure di ottimizzazione integrate.
● sorveglianza opzionale dell'azionamento e diagnostica, messa in servizio e comando
tramite un comodo pannello operatore grafico con testo in chiaro o semianalogico nella
rappresentazione ad istogrammi.
● SINAMICS è parte integrante della Totally Integrated Automation (TIA). TIA è il principio
che riunisce una gamma di prodotti ottimizzati per la tecnica di automazione e
azionamento. Il fulcro di questo principio è l'omogeneità di progettazione, comunicazione
e gestione dei dati per tutti i prodotti. SINAMICS si inserisce perfettamente nel concetto
TIA.
Per WinCC sono disponibili appositi faceplate e blocchi S7/PCS7.
● L'integrazione nel sistema SIMATIC H è possibile grazie a un Y-Link.
● Drive Control Chart (DCC)
Drive Control Chart (DCC) amplia la possibilità di configurare in modo estremamente
semplice le funzioni tecnologiche per SINAMICS.
La biblioteca di blocchi comprende una vasta scelta di blocchi di regolazione, calcolo e
logica, nonché più ampie funzioni di controllo e regolazione. L'Editor DCC, facile da
usare, consente una progettazione grafica di semplice utilizzo ed una chiara
rappresentazione di strutture di regolazione, nonché un elevato grado di riutilizzabilità di
progetti già realizzati. DCC è un add-on del tool di messa in servizio STARTER.
Convertitori da incasso
28
Istruzioni operative, 04/2014, A5E00386872A
Panoramica degli apparecchi
2.4 Campo di impiego, caratteristiche
Qualità
Gli apparecchi da incasso SINAMICS G130 vengono realizzati in conformità ad elevati
standard qualitativi e requisiti severi.
Ciò garantisce la massima affidabilità, disponibilità e funzionalità dei nostri prodotti.
Lo sviluppo, la costruzione, la produzione, il processo di lavorazione e il centro logistico sono
stati certificati secondo DIN ISO 9001 da un ufficio indipendente.
Service
La nostra rete di assistenza e di distribuzione mondiale offre ai clienti la possibilità di
usufruire di consulenze personalizzate, supporto durante la progettazione, corsi di
formazione e di training.
Per tutte le informazioni su come contattare il servizio di assistenza, nonché per il link
aggiornato alle nostre pagine Internet, vedere la sezione "Diagnostica / Anomalie e avvisi"
nel capitolo "Service e supporto".
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
29
Panoramica degli apparecchi
2.5 Principio circuitale
2.5
Principio circuitale
Schema circuitale di SINAMICS G130
Figura 2-3
Schema circuitale di SINAMICS G130
Convertitori da incasso
30
Istruzioni operative, 04/2014, A5E00386872A
Panoramica degli apparecchi
2.6 Targhetta
2.6
Targhetta
Spiegazione della targhetta
Figura 2-4
Targhetta dell'apparecchio da incasso
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
31
Panoramica degli apparecchi
2.6 Targhetta
Dati della targhetta (sull'esempio della targhetta raffigurata)
Posizione
Indicazione
Valore
Spiegazione
①
Input
Ingresso
3 AC
380 ... 480 V
775 A
Collegamento corrente trifase
Tensione d'ingresso nominale
Corrente d'ingresso nominale
②
Output
Uscita
3 AC
0 ... 480 V
745 A
Collegamento corrente trifase
Tensione d'uscita nominale
Corrente d'uscita nominale
③
Temperature Range
Campo di temperatura
0 ... 40 °C
Campo della temperatura ambiente in cui l'apparecchio da
incasso può essere caricato al 100%
④
Degree of protection
Grado di protezione
IP00
Grado di protezione
(per le grandezze costruttive FX, GX: IP20, per le grandezze
costruttive HX, JX: IP00)
⑤
Duty Class
Classe di carico
I
I: Categoria di carico I secondo EN 60146-1-1 = 100 %
permanente
(con i valori di corrente indicati, l'apparecchio da incasso può
essere caricato al 100 % in servizio continuo)
⑥
Cooling method
Tipo di raffreddamento
AF
⑦
Weight
Peso
294 kg
A: Refrigerante: aria
F: Tipo di circolazione: raffreddamento forzato, unità di
azionamento (ventilatore) nell'apparecchio
Peso dell'apparecchio da incasso
Data di produzione
La data di produzione può essere dedotta dallo schema seguente:
Tabella 2- 1
Anno e mese di produzione
Carattere
Anno di produzione
Carattere
Mese di produzione
C
2012
1 ... 9
gennaio - settembre
D
2013
O
ottobre
E
2014
N
novembre
F
2015
D
dicembre
H
2016
J
2017
Convertitori da incasso
32
Istruzioni operative, 04/2014, A5E00386872A
Installazione meccanica
3.1
3
Contenuto del capitolo
Questo capitolo descrive:
● le condizioni per il montaggio degli apparecchi da incasso e dei componenti opzionali
● la preparazione e il montaggio degli apparecchi da incasso e dei componenti opzionali
3.2
Trasporto, immagazzinaggio
Trasporto
AVVERTENZA
Pericolo di morte a causa di trasporto improprio dell'apparecchio
Se l'apparecchio viene trasportato in modo improprio o se si utilizzano mezzi per il
trasporto non consentiti, l'apparecchio può ribaltarsi. Ne possono conseguire la morte,
lesioni gravi e danni materiali.
• Accertarsi che il trasporto venga effettuato solo da personale qualificato con mezzi di
trasporto e sollevamento consentiti.
• Rispettare le indicazioni relative al baricentro. Su ogni unità di trasporto è apposto un
adesivo o un timbro con i dati esatti relativi al baricentro dell'armadio.
• Trasportare l'apparecchio solo nella posizione verticale contrassegnata. Non urtare o
ribaltare l'apparecchio.
• Le forche dell'elevatore devono sporgere dal lato posteriore del pallet di trasporto. Non
fare forza sulle tavole che formano il fondo delle unità di trasporto.
AVVERTENZA
Pericolo di morte a causa dell'uso di elevatori a forca non consentiti
Se la forca è troppo corta, l'unità di trasporto o l'armadio potrebbe ribaltarsi, con
conseguente pericolo di morte o di lesioni gravi per il personale o di danni all'armadio.
• Le forche dell'elevatore devono sporgere dal lato posteriore del pallet di trasporto. Non
fare forza sulle tavole che formano il fondo delle unità di trasporto.
• Per il trasporto delle apparecchiature utilizzare solo elevatori a forca consentiti.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
33
Installazione meccanica
3.2 Trasporto, immagazzinaggio
Nota
Istruzioni per il trasporto
• Gli apparecchi vengono imballati in fabbrica in base alle sollecitazioni e alle condizioni
climatiche che incontreranno durante il trasporto e nel paese di destinazione.
• Rispettare le indicazioni per il trasporto, l'immagazzinaggio e l'uso corretto riportate
sull'imballaggio.
• Per il trasporto con elevatori a forca, gli apparecchi vengono montati su una base in
legno (pallet).
• Una volta tolto l'imballaggio, le apparecchiature possono essere trasportate utilizzando gli
appositi golfari presenti sulle stesse. Assicurarsi che il carico sia ripartito in modo
uniforme. Le catene applicate ai golfari per il trasporto possono essere sottoposte
soltanto a un carico verticale verso l'alto. Durante il trasporto vanno evitati gli scossoni e
gli urti violenti, ad es. durante l'appoggio a terra.
• Temperature ambiente ammesse:
Raffreddamento ad aria: da -25 a +70 °C, classe 2K3 secondo IEC 60721-3-2 Per brevi intervalli fino a -40 °C per max. 24 ore
Nota
Avvertenze relative ai danni dovuti al trasporto
• Ispezionare attentamente l'apparecchio prima di accettare la fornitura della ditta di
trasporto.
• Confrontare ciascun articolo ricevuto con la bolla di consegna.
• Comunicare immediatamente alla ditta di trasporto ogni mancanza o danno.
• Se vengono scoperti difetti o danni nascosti, contattare tempestivamente la ditta di
trasporto per richiedere una perizia dell'apparecchio.
• Se non viene effettuata una comunicazione tempestiva, si potrebbe perdere il diritto al
risarcimento danni per difetti e guasti.
• Se necessario, avvalersi del supporto della filiale Siemens più vicina.
Immagazzinaggio
Gli apparecchi vanno conservati all'interno di locali asciutti e puliti. Sono ammesse
temperature comprese tra -25 e +55 °C (classe 1K4 secondo EN 60721-3-1). Non sono
ammesse variazioni di temperatura superiori a 20 K all'ora.
In caso di immagazzinaggio prolungato, gli apparecchi - una volta estratti dall'imballaggio devono essere protetti dall'imbrattamento e dagli influssi ambientali con apposite coperture o
altre protezioni; in caso contrario decade la garanzia.
Convertitori da incasso
34
Istruzioni operative, 04/2014, A5E00386872A
Installazione meccanica
3.3 Montaggio
3.3
Montaggio
AVVERTENZA
Pericolo di morte per inosservanza delle avvertenze di sicurezza generali e dei rischi
residui
L'inosservanza delle avvertenze di sicurezza generali e dei rischi residui può avere come
conseguenza incidenti che possono comportare ferite gravi o la morte.
• Rispettare le avvertenze di sicurezza generali.
• Nella valutazione dei rischi occorre tenere conto dei rischi residui.
3.3.1
Requisiti per il luogo di installazione
Gli apparecchi da incasso sono previsti per l'installazione in aree elettriche chiuse secondo
EN 61800-5-1. Un'area elettrica chiusa è una zona o un luogo che ospita equipaggiamenti
elettrici il cui accesso è riservato a personale qualificato o formato mediante apertura di una
porta o rimozione di una barriera con l'utilizzo di una chiave o di un attrezzo e che è
contrassegnato chiaramente con un adeguato segnale di pericolo.
Le unità operative devono essere asciutte e prive di polvere. L'aria addotta non deve
contenere gas, vapori e polveri conduttive che potrebbero compromettere il funzionamento
dell'apparecchio. Se necessario, l'aria addotta nel locale di installazione va depurata tramite
un filtro.
Devono essere rispettati i valori consentiti per le condizioni climatiche ambientali.
In caso di temperature > 40 °C (104 °F) e altitudini di montaggio > 2000 m è necessaria una
riduzione della potenza.
Gli apparecchi da incasso sono conformi al grado di protezione IP20 per le grandezze
costruttive FX e GX e al grado di protezione IP00 per le grandezze costruttive HX e JX, in
base a EN 60529.
Il montaggio va eseguito seguendo i disegni quotati forniti. Anche la distanza necessaria
nella zona circostante gli apparecchi è riportata nei disegni quotati.
L'aria di raffreddamento per la parte di potenza viene aspirata nella parte inferiore
dell'apparecchio. L'aria riscaldata viene smaltita attraverso il dissipatore di calore. In caso di
montaggio in armadi, adottare misure di isolamento adeguate per evitare che l'aria riscaldata
passi nuovamente nell'area di aspirazione del dissipatore di calore.
Conformemente a EN 61800-3, l'apparecchio da incasso non è concepito per l'impiego in reti
pubbliche a bassa tensione che alimentano edifici residenziali. In queste reti possono infatti
prodursi disturbi ad alta frequenza.
Tramite provvedimenti aggiuntivi (ad es. filtro di rete) è comunque possibile anche l'impiego
nel "primo ambiente" secondo EN 61800-3 categoria C2.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
35
Installazione meccanica
3.3 Montaggio
Nota
Disturbo dei servizi radio a causa di interferenze ad alta frequenza in ambienti residenziali
In un ambiente residenziale questo prodotto provoca interferenze ad alta frequenza che
possono rendere necessaria l'adozione di misure antidisturbo.
Questo apparecchio non è concepito per il funzionamento libero nel primo ambiente (ambito
residenziale) e non deve essere usato nel primo ambiente senza adeguate misure
antidisturbo.
• Affidare a personale qualificato l'installazione e la messa in servizio con le adeguate
misure antidisturbo.
3.3.2
Disimballaggio
Controllare la completezza della fornitura confrontandola con la bolla di consegna. Verificare
l’integrità dell'apparecchio.
Lo smaltimento dell'imballaggio deve avvenire nel rispetto delle norme e delle
regolamentazioni vigenti a livello nazionale.
3.3.3
Attrezzi necessari
Per il montaggio sono necessari:
● Chiave per dadi oppure chiave a tubo da 10
● Chiave per dadi oppure chiave a tubo da 13
● Chiave per dadi oppure chiave a tubo, apertura della chiave 16/17
● Chiave per dadi oppure chiave a tubo, apertura della chiave 18/19
● Chiave esagonale gr. 8
● Chiave dinamometrica 5 Nm ... 50 Nm
● Cacciavite gr. 2
● Cacciavite Torx T20
● Cacciavite Torx T25
● Cacciavite Torx T30
Si consiglia di utilizzare una cassetta di chiavi a tubo con due elementi di prolunga.
Convertitori da incasso
36
Istruzioni operative, 04/2014, A5E00386872A
Installazione meccanica
3.4 Power Module
3.4
Power Module
Descrizione
Il Power Module costituisce la parte di potenza di un convertitore AC-AC, la quale, se dotata
di componenti aggiuntivi nella rete o nel motore, può diventare un sistema convertitore.
Inoltre, se necessario (ad es. in caso di funzionamento di frenatura), è possibile installare un
Braking Module nel circuito intermedio del convertitore, in un vano di montaggio previsto nel
Power Module.
Il Power Module forma, da una tensione di rete di ampiezza e frequenza costante, una
tensione di uscita di ampiezza e frequenza variabile.
AVVERTENZA
Pericolo di morte per incendio in caso di surriscaldamento a causa di distanze di
ventilazione insufficienti
Se gli spazi liberi di ventilazione sono insufficienti, può verificarsi un surriscaldamento con
conseguente pericolo per le persone perché possono svilupparsi fumo e incendi. Le
apparecchiature e i sistemi possono inoltre avere una percentuale di guasti maggiore e una
durata di vita inferiore.
• Rispettare assolutamente le distanze minime per gli spazi liberi di ventilazione dei vari
componenti. Queste distanze sono riportate nei disegni quotati o nelle "Avvertenze di
sicurezza specifiche del prodotto" all'inizio di questo capitolo.
Avvertenze relative ai dispositivi di sollevamento
ATTENZIONE
Danni all'apparecchio dovuti a un trasporto improprio
Un trasporto improprio può determinare sollecitazioni meccaniche alla custodia del Power
Module o alle sbarre collettrici, con danni conseguenti all'apparecchio.
• Per il trasporto dei Power Module, utilizzare un sistema di sollevamento che consenta
alla fune e/o alle catene di scorrere verticalmente.
• Non utilizzare le sbarre collettrici per afferrare i Power Module o per fissare un attrezzo
di sollevamento.
ATTENZIONE
Danni materiali dovuti alla mancata rimozione delle alette di sollevamento in apparecchi
delle grandezze costruttive HX e JX
La mancata rimozione delle alette di sollevamento in Power Module di grandezza
costruttiva HX e JX può comportare danni dovuti al mancato rispetto delle distanze di
isolamento elettrico richieste.
• Nei Power Module delle grandezze costruttive HX e JX rimuovere, dopo il montaggio, le
alette di sollevamento rosse.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
37
Installazione meccanica
3.4 Power Module
3.4.1
Disegni quotati
Disegno quotato grandezza costruttiva FX
Tabella 3- 1
Disegno quotato grandezza costruttiva FX
Vista anteriore
Vista laterale
Convertitori da incasso
38
Istruzioni operative, 04/2014, A5E00386872A
Installazione meccanica
3.4 Power Module
Disegno quotato grandezza costruttiva GX
Tabella 3- 2
Disegno quotato grandezza costruttiva GX
Vista anteriore
Vista laterale
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
39
Installazione meccanica
3.4 Power Module
Disegno quotato della grandezza costruttiva HX
Tabella 3- 3
Disegno quotato della grandezza costruttiva HX
Vista laterale
Vista posteriore
Convertitori da incasso
40
Istruzioni operative, 04/2014, A5E00386872A
Installazione meccanica
3.4 Power Module
Disegno quotato della grandezza costruttiva JX
Tabella 3- 4
Disegno quotato della grandezza costruttiva JX
Vista laterale
Vista posteriore
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
41
Installazione meccanica
3.5 Control Unit CU320-2
3.5
Control Unit CU320-2
Descrizione
La CU320-2 è l'unità di regolazione centrale, in cui vengono realizzate le funzioni di
regolazione e controllo.
AVVERTENZA
Pericolo di incendio per surriscaldamento in caso di spazi liberi di ventilazione insufficienti
Se gli spazi liberi di ventilazione sono insufficienti, si verifica un surriscaldamento con
conseguente pericolo per le persone perché possono svilupparsi fumo e incendi. Potrebbe
inoltre verificarsi una percentuale di guasti maggiore e una durata di vita inferiore della
Control Unit.
• Rispettare assolutamente uno spazio libero di ventilazione di 80 mm sopra e sotto la
Control Unit.
Disegno quotato
Figura 3-1
Disegno quotato CU320-2
Convertitori da incasso
42
Istruzioni operative, 04/2014, A5E00386872A
Installazione meccanica
3.6 Terminal Module TM31
Nota
Montaggio della Control Unit
Per le grandezze costruttive FX e GX, la Control Unit viene montata a sinistra, accanto al
Power Module. Gli elementi di collegamento previsti per tale scopo sono forniti insieme al
Power Module.
Per le grandezze costruttive HX e JX, la Control Unit va inserita nel Power Module.
Control Unit: scheda di memoria
La scheda di memoria contiene il software di controllo e i parametri di regolazione.
Nota
Possibile fermo impianto a causa di estrazione e inserimento della scheda di memoria
durante il funzionamento
Se la scheda di memoria viene estratta e inserita durante il funzionamento, si rischia la
perdita dei dati ed eventualmente il fermo impianto.
• Procedere quindi all'estrazione e all'inserimento della scheda di memoria solo con la
Control Unit fuori tensione.
3.6
Terminal Module TM31
Descrizione
Il Terminal Module TM31 è un'unità di ampliamento con morsetti. Il Terminal Module TM31
consente infatti di incrementare il numero di ingressi/uscite digitali presenti. Inoltre sull'unità
TM31 sono disponibili ingressi e uscite di tipo analogico.
AVVERTENZA
Pericolo di incendio per surriscaldamento in caso di spazi liberi di ventilazione insufficienti
Se gli spazi liberi di ventilazione sono insufficienti, si verifica un surriscaldamento con
conseguente pericolo per le persone perché possono svilupparsi fumo e incendi. Il
Terminal Module può inoltre avere una percentuale di guasti maggiore e una durata di vita
inferiore.
• Rispettare assolutamente uno spazio libero di ventilazione di 50 mm sopra e sotto il
Terminal Module.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
43
Installazione meccanica
3.6 Terminal Module TM31
Disegno quotato
Figura 3-2
Disegni quotati Terminal Module TM31
Nota
Montaggio del Terminal Module
L’unità TM31 deve essere montata in prossimità del Power Module, su una guida DIN
predisposta dal cliente.
Convertitori da incasso
44
Istruzioni operative, 04/2014, A5E00386872A
Installazione meccanica
3.7 Sensor Module SMC30
3.7
Sensor Module SMC30
Descrizione
Il Sensor Module SMC30 è un'unità per la valutazione dei segnali dell'encoder. All'unità
SMC30 possono essere collegati encoder TTL/HTL con o senza rilevamento di rottura
conduttore. La temperatura del motore può essere inoltre rilevata tramite termistore KTY841C130 o PTC.
AVVERTENZA
Pericolo di incendio per surriscaldamento in caso di spazi liberi di ventilazione insufficienti
Se gli spazi liberi di ventilazione sono insufficienti, si verifica un surriscaldamento con
conseguente pericolo per le persone perché possono svilupparsi fumo e incendi. Il Voltage
Sensing Module può inoltre avere una percentuale di guasti maggiore e una durata di vita
inferiore.
• Rispettare assolutamente uno spazio libero di ventilazione di 50 mm sopra e sotto il
Sensor Module.
Disegno quotato
Figura 3-3
Disegno quotato Sensor Module SMC30
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
45
Installazione meccanica
3.7 Sensor Module SMC30
Nota
Montaggio del Sensor Module
L'unità SMC30 deve essere montata in prossimità del Power Module, su una guida DIN
predisposta dal cliente.
Convertitori da incasso
46
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.1
4
Contenuto del capitolo
Questo capitolo descrive:
● La creazione dei collegamenti elettrici per il Power Module, la Control Unit CU320-2 e per
il Terminal Module TM31 e il Sensor Module SMC30 opzionali.
● L'adattamento della tensione del ventilatore e della tensione di alimentazione interna alle
condizioni locali (tensione di rete)
● Le interfacce della Control Unit CU320-2, del Terminal Module TM31 e del Sensor
Module SMC30.
4.2
Preparativi
Attrezzi necessari
Per il montaggio dei collegamenti sono necessari i seguenti attrezzi:
● Chiave per dadi oppure chiave a tubo da 10
● Chiave per dadi oppure chiave a tubo da 13
● Chiave per dadi oppure chiave a tubo, apertura della chiave 16/17
● Chiave per dadi oppure chiave a tubo, apertura della chiave 18/19
● Chiave esagonale gr. 8
● Chiave dinamometrica fino a 50 Nm
● Cacciavite gr. 2
● Cacciavite Torx T20
● Cacciavite Torx T25
● Cacciavite Torx T30
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
47
Installazione elettrica
4.3 Importanti misure di sicurezza
4.3
Importanti misure di sicurezza
AVVERTENZA
Pericolo di morte per inosservanza delle avvertenze di sicurezza generali e dei rischi
residui
L'inosservanza delle avvertenze di sicurezza generali e dei rischi residui può avere come
conseguenza incidenti che possono comportare ferite gravi o la morte.
• Rispettare le avvertenze di sicurezza generali.
• Nella valutazione dei rischi occorre tenere conto dei rischi residui.
AVVERTENZA
Pericolo di morte per folgorazione in caso di uso di fusibili non adatti
L'uso di fusibili non adatti può comportare lesioni gravi e la morte per folgorazione
• Utilizzare esclusivamente i fusibili riportati nei Dati tecnici.
• Rispettare la corrente di cortocircuito minima necessaria per il rispettivo fusibile.
PERICOLO
Pericolo di morte per folgorazione a causa di carica residua dei condensatori del circuito
intermedio
A causa dei condensatori del circuito intermedio, dopo la disinserzione della tensione di
alimentazione resta presente una tensione pericolosa ancora per alcuni minuti.
Il contatto con elementi sotto tensione provoca la morte o gravi lesioni.
• Aprire l'apparecchiatura solo dopo che è trascorso l'intervallo di tempo specificato sulla
targhetta di avviso.
• Prima dell'inizio dei lavori verificare l'assenza di tensione misurandola su tutti i poli,
anche contro terra.
ATTENZIONE
Danni materiali a causa dell'accensione dell'apparecchio senza forming dei condensatori
del circuito intermedio
Se l'apparecchio viene acceso dopo un periodo di immagazzinaggio di oltre due anni senza
forming dei condensatori del circuito intermedio, possono risultare dei danni.
• In caso di immagazzinaggio di oltre due anni, eseguire il forming prima dell'accensione,
vedere il capitolo "Manutenzione e riparazione".
ATTENZIONE
Utilizzare solo accessori originali Siemens
Affinché il sistema complessivo funzioni in maniera ottimale, si raccomando l'uso degli
accessori originali Siemens.
Per il cablaggio dei nodi DRIVE-CLiQ si devono utilizzare solo i cavi DRIVE-CLiQ originali.
Convertitori da incasso
48
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.4 Introduzione all'EMC
4.4
Introduzione all'EMC
Cosa si intende con EMC?
Per compatibilità elettromagnetica (EMC) si intende la capacità di un apparecchio elettrico di
funzionare senza problemi in un dato ambiente elettromagnetico, senza influenzare
dannosamente l'ambiente circostante.
L'EMC rappresenta quindi una caratteristica qualitativa per
● Immunità intrinseca ai disturbi: resistenza ai disturbi elettrici interni
● Immunità ai disturbi esterni: resistenza ai disturbi elettromagnetici esterni al sistema
● Grado di emissione dei disturbi: influsso sull'ambiente circostante dovuto alla dispersione
elettromagnetica
Per un funzionamento dell'apparecchio esente da disturbi, nell'impianto non va trascurato
l'ambiente circostante. Per questo motivo in fase di installazione dell'impianto occorre
rispettare particolari requisiti relativi alla compatibilità elettromagnetica.
Sicurezza di esercizio e immunità ai disturbi
Per ottenere la massima sicurezza operativa e l'immunità disturbi di un intero impianto
(convertitore, automazione, azionamento ecc.), il costruttore del convertitore e l'utente
devono mettere in atto determinate precauzioni. Solo se vengono prese tutte le precauzioni
necessarie è possibile garantire il funzionamento corretto del convertitore e soddisfare i
requisiti prescritti dalla legge (2004/108/CE).
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
49
Installazione elettrica
4.4 Introduzione all'EMC
Emissione di disturbi
I requisiti EMC per i "sistemi di azionamento a velocità variabile" sono descritti nella norma
EN 61800–3, che elenca i requisiti per convertitori con tensioni di esercizio inferiori a 1000 V.
A seconda del luogo di installazione del sistema di azionamento, vengono definiti vari
ambienti e categorie.
Figura 4-1
Definizione di primo e secondo ambiente
Figura 4-2
Definizione delle categorie da C1 a C4
Tabella 4- 1
Definizione del primo e secondo ambiente
Definizione del primo e secondo ambiente
Primo ambiente
Edifici residenziali o luoghi in cui il sistema di azionamento è collegato
senza trasformatore alla rete pubblica a bassa tensione.
Secondo ambiente
Zone industriali alimentate dalla rete a media tensione tramite il proprio
trasformatore.
Convertitori da incasso
50
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.5 Installazione in conformità EMC
Tabella 4- 2
Definizione delle categorie da C1 ... C4
Definizione delle categorie da C1 ... C4
4.5
Categoria C1
Tensione nominale <1000 V, per l'impiego illimitato nel primo ambiente.
Categoria C2
Sistemi di azionamento fissi, tensione nominale <1000 V, per l'impiego nel
secondo ambiente. Impiego nel primo ambiente se venduti e installati da
personale qualificato.
Categoria C3
Tensione nominale <1000 V, per l'impiego esclusivo nel secondo ambiente.
Categoria C4
Tensione nominale ≥1000 V o per correnti nominali ≥400 A in sistemi
complessi nel secondo ambiente.
Installazione in conformità EMC
Di seguito vengono riassunte alcune delle principali informazioni e indicazioni che facilitano il
rispetto delle direttive EMC e CE.
Montaggio dell'armadio
● Collegare le parti metalliche verniciate o anodizzate con rondelle dentate oppure
rimuovere lo strato isolante.
● Utilizzare lamiere di montaggio non verniciate e sgrassate.
● Eseguire un collegamento centrale tra la massa ed il cavo di protezione del sistema
(terra).
Interruzioni schermate
● Ponticellare le interruzioni della schermatura, ad esempio nelle morsettiere, interruttori,
ecc. il più possibile con bassa impedenza ed ampie superfici di contatto.
Utilizzo di grandi sezioni
● Realizzare i cavi di terra e di massa con grandi sezioni, preferibilmente con trecce di terra
o cavi flessibili multifilari.
Posa separata del cavo motore
● La distanza tra cavo del motore e cavo di segnale dovrebbe essere > 20 cm. Non posare
il cavo di segnale e quello del motore in parallelo.
Posa del cavo equipotenziale
● Si consiglia la posa di un cavo equipotenziale con una sezione minima di 16 mm2
parallelamente ai cavi di comando.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
51
Installazione elettrica
4.5 Installazione in conformità EMC
Utilizzare dispositivi antidisturbo
● Se vengono comandati relè, contattori e carichi induttivi o capacitivi, i relè o i contattori di
comando devono essere dotati di dispositivi antidisturbo.
Posa dei cavi
● Disporre alla distanza maggiore possibile i cavi che emettono disturbi e quelli più sensibili
agli stessi.
● Tutti i cavi devono passare il più vicino possibile a parti della carcassa messe a terra,
come le lamiere di montaggio o il telaio dell'armadio. Ciò riduce la radiazione di
interferenze e l'accoppiamento di interferenze.
● Per ottenere un effetto di schermatura supplementare si devono inoltre collegare a terra
ad entrambe le estremità i conduttori di riserva dei cavi di segnale e dei cavi dati.
● Accorciare i cavi lunghi oppure posarli in zone non soggette a disturbi. Possono nascere
altrimenti ulteriori punti di accoppiamento.
● Se non è possibile evitare punti di intersezione, i conduttori o i cavi che portano segnali di
classi diverse si devono incrociare con un angolo retto, in particolare se si tratta di
segnali sensibili ai disturbi o che possono generare disturbi.
– Classe 1:
cavi non schermati per DC ≤ 60 V
cavi non schermati per AC ≤ 25 V
cavi schermati per segnali analogici
cavi schermati per bus e dati
collegamenti per pannelli operatore, cavi per encoder incrementali e assoluti
– Classe 2:
cavi non schermati per DC > 60 V e ≤ 230 V
cavi non schermati per AC > 25 V e ≤ 230 V
– Classe 3:
cavi non schermati per AC/DC > 230 V e ≤ 1000 V
Collegamento della schermatura
● Le schermature non devono essere utilizzate per condurre corrente. La schermatura non
può essere utilizzata contemporaneamente come conduttore di neutro o conduttore di
protezione.
● Collegare le schermature su ampie superfici di contatto. Il collegamento può essere
realizzato per mezzo di fascette di terra, morsetti o viti.
● Evitare il prolungamento dello schermo verso il punto di terra con uno spezzone di filo
(treccina), l'efficacia dello schermo in questo caso viene ridotta fino al 90%.
● Collegare la schermatura alla sbarra direttamente all'ingresso del cavo nell'armadio.
Isolare il cavo schermato senza interruzioni e portare la schermatura fino al collegamento
dell'apparecchio ma senza collegarlo nuovamente.
Convertitori da incasso
52
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.5 Installazione in conformità EMC
Collegamento delle periferie
● Realizzare il collegamento di massa con ulteriori armadi, parti di impianto e apparecchi
decentralizzati utilizzando cavi a bassa impedenza con sezione il più grande possibile e
comunque non inferiore a 16 mm².
● Collegare a terra i cavi non utilizzati solo dal lato dell'armadio.
● Scegliere la massima distanza possibile tra i cavi di energia e dei segnali, tuttavia almeno
20 cm. Normalmente vale la regola che, tanto più lungo è il percorso parallelo tanto più
grande deve essere la distanza. Se la distanza non può essere osservata, è necessario
prevedere adeguate precauzioni per la schermatura.
● Evitare grandi anelli di cavi.
Filtraggio dei cavi
● In alcuni casi i cavi di rete e di alimentazione per gli apparecchi e i moduli devono essere
filtrati in armadio per ridurre i disturbi indotti ed emessi dai cavi.
● Per limitare l'emissione di disturbi, l'apparecchio viene equipaggiato in fabbrica con un
filtro antidisturbi conformemente ai valori limite stabiliti per categoria C3. Per l'impiego nel
primo ambiente (categoria C2) sono disponibili filtri opzionali.
Conduttore di protezione
● Conformemente alla norma EN 61800-5-1, punto 6.3.6.7, la sezione minima del
conduttore di protezione deve corrispondere ai regolamenti di sicurezza locali relativi alla
messa a terra degli equipaggiamenti con corrente di dispersione elevata.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
53
Installazione elettrica
4.6 Schema dei collegamenti
4.6
Schema dei collegamenti
Power Module, grandezza costruttiva FX
Figura 4-3
Schema dei collegamenti del Power Module, grandezza costruttiva FX (vista senza
copertura anteriore)
Convertitori da incasso
54
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.6 Schema dei collegamenti
Power Module, grandezza costruttiva GX
Figura 4-4
Schema dei collegamenti del Power Module, grandezza costruttiva GX (vista senza
copertura anteriore)
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
55
Installazione elettrica
4.6 Schema dei collegamenti
Power Module, grandezza costruttiva HX
Figura 4-5
Schema dei collegamenti del Power Module, grandezza costruttiva HX (vista senza copertura anteriore)
Convertitori da incasso
56
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.6 Schema dei collegamenti
Power Module, grandezza costruttiva JX
Figura 4-6
Schema dei collegamenti del Power Module, grandezza costruttiva JX (vista senza copertura anteriore)
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
57
Installazione elettrica
4.7 Collegamenti di potenza
4.7
Collegamenti di potenza
AVVERTENZA
Pericolo di morte per folgorazione a causa di scambio o cortocircuito dei connettori
dell'apparecchio
Lo scambio dei connettori di rete e degli allacciamenti al motore o il cortocircuito dei
connettori del circuito intermedio può provocare la distruzione dell'apparecchiatura e, come
conseguenza, la morte o gravi lesioni.
• Non invertire i morsetti di ingresso e di uscita dell'apparecchio.
• Non invertire e non cortocircuitare i morsetti del circuito intermedio.
Nota
Interruttore di protezione FI
L'apparecchio non deve essere alimentato tramite un interruttore di protezione FI
(EN 61800-5-1).
Convertitori da incasso
58
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.7 Collegamenti di potenza
4.7.1
Capicorda
Capicorda
Gli allacciamenti cavi sugli apparecchi sono predisposti per capicorda secondo DIN 46234 o
DIN 46235.
Nella tabella seguente sono riportate le dimensioni massime per il collegamento di capicorda
alternativi.
Queste dimensioni non devono essere superate dai capicorda utilizzati, altrimenti non
possono essere garantiti il fissaggio meccanico e il rispetto delle distanze di tensione.
Figura 4-7
Tabella 4- 3
Dimensioni dei capicorda
Dimensioni dei capicorda
Vite / bullone
Sezione di collegamento
[mm²]
d2
[mm]
b
[mm]
l
[mm]
c1
[mm]
c2
[mm]
M8
70
8,4
24
55
13
10
M10
185
10,5
37
82
15
12
M10
240
13
42
92
16
13
M12
95
13
28
65
16
13
M12
185
13
37
82
16
13
M12
240
13
42
92
16
13
M16
240
17
42
92
19
16
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
59
Installazione elettrica
4.7 Collegamenti di potenza
4.7.2
Sezioni di collegamento, lunghezze dei conduttori
Sezioni di collegamento
Le sezioni di collegamento dell'apparecchio per allacciamento alla rete, collegamento al
motore e messa a terra possono essere ricavate dalle tabelle contenute nella sezione "Dati
tecnici".
Lunghezze cavi
Le lunghezze massime dei conduttori utilizzabili si riferiscono ai tipi di cavi comuni o
raccomandati da SIEMENS. Lunghezze superiori dei cavi possono essere impiegate solo
previa conferma della SIEMENS.
Le lunghezze dei cavi indicate rappresentano la distanza effettiva tra il convertitore e il
motore, tenendo conto di fattori quali la posa in parallelo, la portata di corrente e il fattore di
posa:
● Conduttore non schermato (ad es. Protodur NYY): max. 450 m
● Conduttore schermato (ad es. Protodur NYCWY, Protoflex EMV 3 Plus): max. 300 m.
Nota
Lunghezze cavi
Le lunghezze dei conduttori specificate sono valide anche con le bobine motore presenti.
Nota
Cavi schermati
Nei cavi raccomandati da Siemens del tipo PROTOFLEX-EMV-3 PLUS, il conduttore di
protezione è composto da tre conduttori di protezione simmetrici. I conduttori di protezione
devono essere quindi provvisti di capocorda e collegati a terra singolarmente. Inoltre, il cavo
è dotato di uno schermo a calza in rame a filo fine concentrico. Per la soppressione dei
radiodisturbi secondo EN 61800-3, lo schermo deve essere provvisto di un'ampia superficie
di contatto su entrambi i lati.
Sul lato del motore si consiglia di impiegare delle giunzioni per cavi nelle morsettiere per
creare un'ampia superficie di contatto sullo schermo.
Convertitori da incasso
60
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.7 Collegamenti di potenza
4.7.3
Collegamento dei cavi del motore e dei cavi di rete
Collegamento dei cavi del motore e dei cavi di rete al Power Module
1. Rimuovere eventualmente le coperture e/o le coperture anteriori dal pannello di
connessione per i cavi del motore (collegamenti U2/T1, V2/T2, W2/T3; X2) e i cavi della
rete (collegamenti U1/L1, V1/L2, W1/L3; X1).
2. Avvitare il conduttore di protezione (PE) nei punti previsti nell'armadio con il relativo
collegamento contrassegnato con il simbolo di terra (50 Nm per M12).
3. Avvitare i cavi di rete e del motore con i collegamenti.
Rispettare la sequenza di collegamento corretta dei conduttori U2/T1, V2/T2, W2/T3 e
U1/L1, V1/L2, W1/L3!
ATTENZIONE
Danni materiali a causa di collegamenti di potenza allentati
A causa di coppie di serraggio insufficienti o di vibrazioni possono prodursi collegamenti
elettrici errati. Di conseguenza possono verificarsi danni da incendio o anomalie funzionali.
• Serrare tutti i collegamenti di potenza con le coppie di serraggio prescritte, ad es. i
collegamenti alla rete, al motore o al circuito intermedio.
• Verificare regolarmente tutti i collegamenti di potenza serrandoli con la coppia di
serraggio prescritta. Questo vale in particolare dopo un trasporto.
Nota
Collegamento PE del motore
Il collegamento PE al motore deve essere ricondotto direttamente e collegato al Power
Module.
Senso di rotazione del motore
Nella norma EN 60034-7 le due estremità di un motore elettrico sono definite nel seguente
modo:
● DE (Drive End): in genere il lato di azionamento (AS) del motore
● NDE (Non-Drive End): in genere il lato del motore opposto all'azionamento (BS)
Un motore elettrico gira a destra se guardando il lato DE l'albero gira in senso orario.
Nei motori elettrici con 2 estremità d'albero, per determinare il senso di rotazione occorre
scegliere l'estremità definita come lato azionamento.
Per una rotazione destrorsa il motore elettrico deve essere collegato conformemente alla
tabella seguente.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
61
Installazione elettrica
4.7 Collegamenti di potenza
Tabella 4- 4
Morsetti di collegamento del Power Module e del motore
Power Module (morsetti di collegamento)
Motore (morsetti di collegamento)
U2/T1
U
V2/T2
V
W2/T3
W
In caso di rotazione sinistrorsa (vista sull'albero motore) è necessario scambiare due fasi
rispetto al collegamento per la rotazione destrorsa.
Nota
Avvertenze per il campo rotante
Se nel collegamento del motore il senso di rotazione risulta errato, è possibile correggerlo
tramite p1821 (Inversione del senso di rotazione) senza cambiare la sequenza di fase
(vedere la sezione "Funzioni, funzioni di sorveglianza e funzioni di protezione/Inversione del
senso di rotazione").
Per i motori che possono essere collegati in stella o triangolo, occorre accertarsi che
l'interconnessione degli avvolgimenti sia adatta alla tensione di esercizio riportata sulla
targhetta o nella documentazione del motore. Verificare che l'isolamento dell'avvolgimento
del motore collegato presenti la resistenza necessaria per il funzionamento del convertitore.
4.7.4
DCPS, DCNS – Collegamento per un filtro du/dt con Voltage Peak Limiter
Tabella 4- 5
DCPS, DCNS
Grandezza costruttiva
Sezione max. collegabile
Vite di collegamento
FX
1 x 70 mm²
M8
GX
1 x 70 mm²
M8
HX
1 x 185 mm²
M10
JX
2 x 185 mm²
M10
Nelle grandezze costruttive FX e GX i cavi di collegamento vengono convogliati verso il
basso e fatti uscire attraverso il Power Module.
4.7.5
Adattamento della tensione del ventilatore
L'alimentazione di tensione del ventilatore dell'apparecchiatura (1AC 230 V) nel Power
Module è prodotta dalla rete principale con l'ausilio di un trasformatore.
Per l'adattamento fine alla rispettiva tensione nominale di rete, il trasformatore è dotato di
prese sul lato primario.
Il collegamento indicato in fabbrica con la linea tratteggiata deve essere eventualmente
commutato alla tensione di rete effettiva.
La posizione dei morsetti di impostazione è indicata negli schemi dei collegamenti (vedere il
capitolo "Schema dei collegamenti").
Convertitori da incasso
62
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.7 Collegamenti di potenza
Nota
Numero dei trasformatori
Per le grandezze costruttive FX, GX e HX è previsto un trasformatore integrato, per la
grandezza costruttiva JX i trasformatori sono due. In questi apparecchi i due morsetti sul lato
primario devono essere impostati insieme.
Figura 4-8
Morsetti di impostazione per il trasformatore del ventilatore
(3 AC 380 ... 480 V / 3 AC
500 ... 600 V / 3 AC 660 ... 690 V)
L'abbinamento della tensione di rete effettiva per l'impostazione del trasformatore del
ventilatore è illustrato nelle tabelle seguenti.
Nota
Trasformatore del ventilatore
per 3 AC 660 ... 690 V
Nel trasformatore del ventilatore 3 AC 660 V ... 690 V è inserito un ponticello tra il morsetto
"600 V" e il morsetto "CON". I morsetti "600V" e "CON" sono riservati ad uso interno.
AVVERTENZA
Pericolo di incendio per surriscaldamento in caso di tensione insufficiente del ventilatore
dell'apparecchio
Se i morsetti non vengono ricablati alla tensione di rete effettiva, può verificarsi un
surriscaldamento con conseguente pericolo per le persone, perché possono svilupparsi
fumo e incendi.
Inoltre, può verificarsi un guasto dei fusibili del ventilatore per sovraccarico.
• Impostare i morsetti in base alla tensione di rete effettiva.
Tabella 4- 6
Abbinamento della tensione di rete effettiva per l'impostazione del trasformatore del
ventilatore
(3 AC 380 V ... 480 V)
Tensione di rete
Presa del trasformatore del ventilatore
380 V ± 10 %
380 V
400 V ± 10 %
400 V
440 V ± 10 %
440 V
480 V ± 10 %
480 V
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
63
Installazione elettrica
4.7 Collegamenti di potenza
Tabella 4- 7
Tabella 4- 8
4.7.6
Abbinamento della tensione di rete effettiva per l'impostazione del trasformatore del
ventilatore
(3 AC 500 V ... 600 V)
Tensione di rete
Presa del trasformatore del ventilatore
500 V ± 10 %
500 V
525 V ± 10 %
525 V
575 V ± 10 %
575 V
600 V ± 10 %
600 V
Abbinamento della tensione di rete effettiva per l'impostazione del trasformatore del
ventilatore
(3 AC 660 V ... 690 V)
Tensione di rete
Presa del trasformatore del ventilatore
660 V ± 10 %
660 V
690 V ± 10 %
690 V
Rimozione della staffa di collegamento dall'unità antidisturbi per il
funzionamento in rete senza messa a terra (rete IT)
Se l'apparecchio viene connesso ad una rete senza messa a terra (rete IT), è necessario
rimuovere la staffa di collegamento dell'unità antidisturbi del Power Module.
Nota
Targhetta di avviso sulla staffa di collegamento
Su ogni staffa di collegamento è applicata una targhetta di avviso gialla che ne facilita
l'identificazione.
• La targhetta di avviso deve essere rimossa dalla staffa di collegamento (tirando
energicamente) se quest'ultima deve rimanere nell'apparecchio (funzionamento su una
rete con messa a terra).
• La targhetta di avviso deve essere rimossa unitamente alla staffa di collegamento se
l'apparecchio viene fatto funzionare su una rete senza messa a terra (rete IT).
Figura 4-9
Targhetta di avviso sulla staffa di collegamento
Convertitori da incasso
64
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.7 Collegamenti di potenza
ATTENZIONE
Danni all'apparecchio dovuti alla mancata rimozione della staffa di collegamento in caso di
rete non messa a terra
La mancata rimozione della staffa di collegamento dall'unità antidisturbi in una rete senza
messa a terra (rete IT) può causare gravi danni all'apparecchio.
• Con una rete non messa a terra (rete IT), rimuovere la staffa di collegamento con l'unità
antidisturbi.
Figura 4-10
Rimozione della staffa di collegamento dell'unità antidisturbi per la grandezza costruttiva
FX
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
65
Installazione elettrica
4.7 Collegamenti di potenza
Figura 4-11
Rimozione della staffa di collegamento dell'unità antidisturbi per la grandezza costruttiva
GX
Convertitori da incasso
66
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.7 Collegamenti di potenza
Figura 4-12
Rimozione della staffa di collegamento dell'unità antidisturbi per la grandezza costruttiva
HX
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
67
Installazione elettrica
4.7 Collegamenti di potenza
Figura 4-13
Rimozione della staffa di collegamento dell'unità antidisturbi per la grandezza costruttiva JX
Convertitori da incasso
68
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.8 Alimentazione DC 24 V esterna
4.8
Alimentazione DC 24 V esterna
Descrizione
Un'alimentazione esterna DC 24 V è sempre consigliata quando la comunicazione e la
regolazione devono avvenire indipendentemente dalla rete. Questo vale in particolare in
caso di reti deboli nelle quali possono verificarsi spesso interruzioni o cadute di rete.
Inoltre un'alimentazione esterna indipendente dall'alimentazione principale offre la possibilità
di continuare a visualizzare i messaggi di avviso e di anomalia sul pannello operatore e sui
dispositivi di protezione e di sorveglianza interni dell'apparecchio.
La corrente necessaria è di 4 A.
Collegamento
Collegare l'alimentazione DC 24 V esterna ai morsetti 1 (P 24 V) e 2 (Mext) della morsettiera
–X9 del Power Module.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
69
Installazione elettrica
4.9 Schema di cablaggio DRIVE-CLiQ
4.9
Schema di cablaggio DRIVE-CLiQ
La figura seguente riporta i dati per i collegamenti DRIVE-CLiQ tra i componenti.
ATTENZIONE
Rispetto dei dati di collegamento
I dati relativi ai collegamenti DRIVE-CLiQ devono essere rispettati; in caso contrario
possono verificarsi problemi durante la messa in servizio tramite STARTER o il pannello
operativo AOP30.
Figura 4-14
Schema di cablaggio DRIVE-CLiQ
Convertitori da incasso
70
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
4.10
Collegamenti dei segnali
4.10.1
Power Module
X9: Morsettiera
Tabella 4- 9
Morsettiera X9
Morsetto
Funzione
1
P24V
2
M
3
Riservato, lasciare libero
4
Riservato, lasciare libero
5
HS1
6
HS2
Dati tecnici
Tensione: DC 24 V (20,4 ... 28,8 V)
Corrente assorbita: max. 4 A
Comando contattore principale
AC 240 V: max. 8 A
DC 30 V: max. 1 A
con separazione di potenziale
Sezione max. collegabile: 2,5 mm²
X41: Morsetti EP / collegamento sensore di temperatura
Tabella 4- 10 Morsettiera X41
Morsetto
Funzione
1
EP M1 (Enable Pulses)
2
EP +24 V (Enable Pulses)
Dati tecnici
Tensione di allacciamento: DC 24 V (20,4 ... 28,8 V)
Corrente assorbita: 10 mA
Tempi di commutazione del segnale:
L → H: 100 μs
H → L: 1000 μs
La funzione di blocco impulsi è disponibile solo
quando sono abilitate le Safety Integrated Basic
Functions.
3
-Temp
4
+Temp
Collegamento sensore temperatura KTY84–1C130 /
PTC / PT100
Sezione max. collegabile: 1,5 mm²
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
71
Installazione elettrica
4.10 Collegamenti dei segnali
AVVERTENZA
Pericolo di morte per folgorazione in caso di scariche di tensione sul sensore di
temperatura
Nei motori senza separazione elettrica sicura dei sensori di temperatura possono verificarsi
scariche di tensione ai danni dell'elettronica dei segnali.
• Utilizzare solo sensori di temperatura che soddisfano i requisiti di separazione sicura.
• Se non è possibile garantire un isolamento elettrico sicuro (ad es. nei motori lineari o nei
motori di terze parti), impiegare un Sensor Module External (SME120 o SME125)
oppure il Terminal Module TM120.
ATTENZIONE
Guasti dell'apparecchiatura dovuti a cavi dei termosensori non schermati o non posati
correttamente
I cavi dei termosensori non schermati o non posati correttamente possono comportare
interferenze dal lato di potenza all'elettronica di elaborazione dei segnali. Ciò può
provocare gravi anomalie su tutti i segnali (messaggi di errore) fino all'avaria dei singoli
componenti (distruzione delle apparecchiature).
• Come cavi dei sensori di temperatura utilizzare esclusivamente cavi schermati.
• Per i cavi dei sensori di temperatura che vengono condotti insieme al cavo del motore,
utilizzare esclusivamente cavi intrecciati a coppie e schermati separatamente.
• Collegare la schermatura su entrambi i lati con una superficie di contatto ampia al
potenziale di massa.
• Raccomandazione: Utilizzare cavi Motion Connect appropriati.
ATTENZIONE
Pericolo di surriscaldamento del motore in caso di sensore di temperatura KTY collegato in
modo errato
Un sensore di temperatura KTY collegato a poli invertiti non è in grado di riconoscere un
surriscaldamento del motore.
• Collegare il sensore di temperatura KTY rispettando la corretta polarità.
Nota
Il collegamento del sensore della temperatura può essere utilizzato nei motori dotati di
sensore KTY84-1C130 oppure PTC negli avvolgimenti dello statore.
Nota
Funzione dei morsetti EP
La funzione dei morsetti EP è disponibile solo quando sono abilitate le Safety Integrated
Basic Functions.
Convertitori da incasso
72
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
X42: alimentazione di tensione per Control Unit, Sensor Module e Terminal Module
Tabella 4- 11 Morsettiera X42
Morsetto
Funzione
Dati tecnici
1
P24L
Alimentazione di tensione per Control Unit, Sensor
Module e Terminal Module (18 ... 28,8 V)
Corrente di carico max.: 3 A
2
3
M
4
Sezione max. collegabile 2,5 mm2
Nota
Possibili collegamenti della morsettiera X42
La morsettiera non è predisposta per erogare liberamente DC 24 V (ad es. per alimentare
altri componenti sul lato impianto), perché ciò potrebbe provocare un sovraccarico
dell'alimentazione di tensione del Control Interface Module e quindi pregiudicare la
funzionalità del sistema.
X46: comando e sorveglianza freni
Tabella 4- 12 Morsettiera X46
Morsetto
Funzione
Dati tecnici
1
BR Output +
L'interfaccia è prevista per il collegamento del Safe
Brake Adapter.
2
BR Output -
3
FB Input +
4
FB Input -
Sezione max. collegabile 1,5
mm2
AVVERTENZA
Pericolo di incendio per surriscaldamento in caso di superamento delle lunghezze dei cavi
di collegamento consentite
Se i cavi di collegamento alla morsettiera X46 sono eccessivamente lunghi, sussiste il
pericolo di surriscaldamento dei componenti e di incendio con sviluppo di fumo.
• Limitare la lunghezza del cavo collegato a un massimo di 10 m.
• Non condurre il cavo di collegamento all'esterno dell'armadio elettrico o del gruppo
dell'armadio elettrico.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
73
Installazione elettrica
4.10 Collegamenti dei segnali
X400 – X402: Interfaccia DRIVE-CLiQ
Tabella 4- 13 Interfaccia DRIVE-CLiQ X400 – X402: Power Module
Pin
Nome del segnale
Dati tecnici
1
TXP
Dati di invio +
2
TXN
Dati di invio -
3
RXP
Dati di ricezione +
4
riservato, lasciare libero
-
5
riservato, lasciare libero
-
6
RXN
Dati di ricezione -
7
riservato, lasciare libero
-
8
riservato, lasciare libero
-
A
+ (24 V)
Alimentazione di tensione
B
M (0 V)
Massa elettronica
Copertura cieca per interfacce DRIVE-CLiQ (50 pezzi) N. di ordinazione: 6SL3066-4CA00-0AA0
Convertitori da incasso
74
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
4.10.2
Control Unit CU320-2 DP
Schema dei collegamenti
Figura 4-15
Schema dei collegamenti della Control Unit CU320-2 DP (senza copertura)
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
75
Installazione elettrica
4.10 Collegamenti dei segnali
Figura 4-16
Interfaccia X140 e prese di misura T0 ... T2 - CU320-2 DP (vista dal basso)
ATTENZIONE
Danni funzionali e danneggiamento della Option Board a causa di rimozione e inserimento
durante il funzionamento
In caso di rimozione e inserimento della Option Board durante il funzionamento possono
verificarsi danni funzionali o potrebbe danneggiarsi la Option Board.
• Per questo motivo si deve estrarre e inserire la Option Board solo quando la Control
Unit è in assenza di corrente.
Convertitori da incasso
76
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
Esempio di collegamento
Figura 4-17
Esempio di collegamento CU320-2 DP
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
77
Installazione elettrica
4.10 Collegamenti dei segnali
X100 ... X103: Interfaccia DRIVE-CLiQ
Tabella 4- 14 Interfaccia DRIVE-CLiQ X100 ... X103
Pin
Nome del segnale
Dati tecnici
1
TXP
Dati di invio +
2
TXN
Dati di invio -
3
RXP
Dati di ricezione +
4
riservato, lasciare libero
5
riservato, lasciare libero
6
RXN
7
riservato, lasciare libero
8
riservato, lasciare libero
A
+ (24 V)
Alimentazione di tensione
B
M (0 V)
Massa elettronica
Dati di ricezione -
Tipo di connettore: Presa RJ45
Copertura cieca per interfacce DRIVE-CLiQ (50 pezzi) N. di ordinazione: 6SL3066-4CA00-0AA0
Convertitori da incasso
78
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
X122: Ingressi/uscite digitali
Tabella 4- 15 Morsettiera X122
Pin
Designazione 1)
Dati tecnici
1
DI 0
Tensione (max.): -3 ... 30 V
Assorbimento di corrente tipico: 9 mA a DC 24 V
Separazione di potenziale: il potenziale di riferimento è il morsetto
M1
2
DI 1
3
DI 2
4
DI 3
5
DI 16
6
DI 17
Livello segnale (inclusa ondulazione)
Livello High: +15 ... +30 V
Livello Low: -3 ... +5 V
7
M1
Potenziale di riferimento per i morsetti 1 ... 6
8
M
Massa elettronica
9
DI/DO 8
10
DI/DO 9
11
M
Come ingresso:
Tensione: DC -3 ... +30 V
Corrente assorbita tipica: 9 mA a 24 V
12
DI/DO 10
13
DI/DO 11
14
M
Ritardo in ingresso (tip.):
con "0" → "1": 50 μs
con "1" → "0": 150 μs
Livello segnale (inclusa ondulazione)
Livello High: 15 … 30 V
Livello Low: -3 … +5 V
DI/DO 8, 9, 10 e 11 sono "ingressi rapidi" 2)
Ritardo in ingresso (tip.):
con "0" → "1": 5 μs
con "1" → "0": 50 μs
Come uscita:
Tensione: DC 24 V
Corrente di carico max. per uscita: 500 mA
Resistente al cortocircuito permanente
Ritardo sull'uscita (tip./max):3)
con "0" → "1": 150 μs / 400 μs
con "1" → "0": 75 μs / 100 μs
Frequenza di commutazione:
con carico ohmico: max. 100 Hz
Con carico induttivo: max. 0,5 Hz
Con carico della lampada: max. 10 Hz
Carico della lampada max.: 5 W
Sezione max. collegabile: 1,5 mm²
1)
DI: ingresso digitale; DI/DO: ingresso/uscita digitale bidirezionale; M: massa elettronica, M1: potenziale di riferimento
2)
Gli ingressi rapidi possono essere sfruttati come ingressi del tastatore di misura o ingressi per la tacca di zero ausiliaria.
3)
Indicazione per: Vcc = 24 V; carico 48 Ω; High ("1") = 90 % Vout; Low ("0") = 10 % Vout
La lunghezza massima collegabile del cavo è di 30 m.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
79
Installazione elettrica
4.10 Collegamenti dei segnali
Nota
Garantire la funzione degli ingressi digitali
Un ingresso aperto viene interpretato come "Low".
Per il funzionamento degli ingressi digitali (DI) è necessario collegare il morsetto M1.
Questo si ottiene con uno dei provvedimenti seguenti:
1. concatenando la massa di riferimento degli ingressi digitali
2. ponticellando il morsetto M. (Attenzione: In questo modo viene eliminata la separazione
di potenziale per gli ingressi digitali interessati).
Nota
Se nell'alimentatore 24 V si verificano brevi cadute di tensione, durante l'intervallo
corrispondente le uscite digitali vengono disattivate.
Convertitori da incasso
80
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
X132: Ingressi/uscite digitali
Tabella 4- 16 Morsettiera X132
Pin
Designazione 1)
Dati tecnici
1
DI 4
Tensione (max.): DC -3 ... +30 V
Corrente assorbita tipica: 9 mA a 24 V
Separazione di potenziale: il potenziale di riferimento è il morsetto
M2
2
DI 5
3
DI 6
4
DI 7
5
DI 20
6
DI 21
7
M2
Potenziale di riferimento per i morsetti 1 ... 6
8
M
massa elettronica
9
DI/DO 12
10
DI/DO 13
11
M
Come ingresso:
Tensione: DC -3 ... +30 V
Corrente assorbita tipica: 9 mA a 24 V
12
DI/DO 14
13
DI/DO 15
14
M
Livello segnale (inclusa ondulazione)
Livello High: 15 ... 30 V
Livello Low: -3 … +5 V
Ritardo in ingresso (tip.):
con "0" → "1": 50 μs
con "1" → "0": 150 μs
Livello segnale (inclusa ondulazione)
Livello High: 15 ... 30 V
Livello Low: -3 … +5 V
DI/DO 12, 13, 14 e 15 sono "ingressi rapidi"2)
Ritardo in ingresso (tip.):
con "0" → "1": 5 μs
con "1" → "0": 50 μs
Come uscita:
Tensione: DC 24 V
Corrente di carico max. per uscita: 500 mA
Resistente al cortocircuito permanente
Ritardo sull'uscita (tip./max):3)
con "0" → "1": 150 μs / 400 μs
con "1" → "0": 75 μs / 100 μs
Frequenza di commutazione:
con carico ohmico: max. 100 Hz
Con carico induttivo: max. 0,5 Hz
Con carico della lampada: max. 10 Hz
Carico della lampada max.: 5 W
Sezione max. collegabile: 1,5 mm²
1)
DI: ingresso digitale; DI/DO: ingresso/uscita digitale bidirezionale; M: massa elettronica; M2: potenziale di riferimento
2)
Gli ingressi rapidi possono essere sfruttati come ingressi del tastatore di misura o ingressi per la tacca di zero ausiliaria
3)
Indicazione per: Vcc = 24 V; carico 48 Ω; High ("1") = 90 % Vout; Low ("0") = 10 % Vout
La lunghezza massima collegabile del cavo è di 30 m.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
81
Installazione elettrica
4.10 Collegamenti dei segnali
Nota
Garantire la funzione degli ingressi digitali
Un ingresso aperto viene interpretato come "Low".
Per il funzionamento degli ingressi digitali (DI) è necessario collegare il morsetto M2.
Questo si ottiene con uno dei provvedimenti seguenti:
1. concatenando la massa di riferimento degli ingressi digitali
2. ponticellando il morsetto M. (Attenzione: In questo modo viene eliminata la separazione
di potenziale per gli ingressi digitali interessati).
Nota
Se nell'alimentatore 24 V si verificano brevi cadute di tensione, durante l'intervallo
corrispondente le uscite digitali vengono disattivate.
X124: Alimentazione dell'elettronica
Tabella 4- 17 Morsettiera X124
Morsetto
Funzione
Dati tecnici
+
Alimentazione dell'elettronica
Tensione: DC 24 V (20,4 ... 28,8 V)
+
Alimentazione dell'elettronica
M
Massa elettronica
Corrente assorbita: max. 1,0 A (senza DRIVE-CLiQ
e uscite digitali)
M
Massa elettronica
Corrente max. sul ponticello nel connettore: 20 A
(15 A secondo UL/CSA)
Sezione max. collegabile: 2,5 mm²
La lunghezza massima collegabile del cavo è di 10 m.
Nota
Passaggio della tensione di alimentazione
I due morsetti "+" e "M" sono ponticellati nel connettore. In questo modo viene garantito il
passaggio della tensione di alimentazione.
L'alimentazione ha luogo tramite il morsetto X41.1/2 del Power Module.
Nota
Avvitare la morsettiera
La morsettiera va avvitata con un cacciavite a lama piatta.
Convertitori da incasso
82
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
X126: Collegamento PROFIBUS
Il collegamento PROFIBUS avviene con un connettore femmina a 9 poli SUB-D (X126), i
collegamenti sono con separazione di potenziale.
Tabella 4- 18 Interfaccia PROFIBUS X126
Pin
Nome del segnale
Significato
Intervallo
1
-
Non occupato
2
M24_SERV
Alimentazione per teleservice, massa
0V
3
RxD/TxD–P
P dati di ricezione/trasmissione (B)
RS485
4
CNTR–P
Segnale di comando
TTL
5
DGND
Potenziale di riferimento dati PROFIBUS
6
VP
Tensione di alimentazione positiva
5 V ± 10 %
7
P24_SERV
Alimentazione per teleservice, + (24 V)
24 V (20,4 ... 28,8 V)
8
RxD/TxD–N
N dati di ricezione/trasmissione (A)
RS485
9
-
Non occupato
Per la telediagnosi si può collegare un adattatore teleservice all'interfaccia PROFIBUS.
L'alimentazione per il teleservice (morsetti 2 e 7) consente un carico di 150 mA.
ATTENZIONE
Danneggiamento della Control Unit o di altri nodi PROFIBUS a causa di correnti di
dispersione elevate
Se non si utilizza un idoneo conduttore di equipotenzialità, il cavo PROFIBUS potrebbe
condurre correnti di dispersione considerevoli, in grado di distruggere la Control Unit o altri
nodi PROFIBUS.
• Tra due parti reciprocamente distanti di uno stesso impianto impiegare un conduttore di
equipotenzialità con sezione minima di 25 mm².
ATTENZIONE
Danneggiamento della Control Unit o di altri nodi di bus CAN mediante collegamento di un
cavo CAN
Se si collega un cavo CAN all'interfaccia X126, si rischia di danneggiare irrimediabilmente
la Control Unit o altri nodi CAN.
• Non collegare cavi CAN all'interfaccia X126.
Connettore PROFIBUS
Per il primo e l'ultimo nodo/partner di una linea devono essere attivate le resistenze di
chiusura bus; in caso contrario la trasmissione dei dati non avviene correttamente.
Le resistenze terminali del bus vengono attivate nel connettore.
Lo schermo del cavo deve essere collegato ad entrambi i lati con una superficie di contatto
ampia.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
83
Installazione elettrica
4.10 Collegamenti dei segnali
Connettori
Il collegamento dei cavi deve avvenire con connettori PROFIBUS in quanto in questo tipo di
connettori sono presenti le resistenze di chiusura del bus.
I connettori PROFIBUS idonei, con le diverse uscite per cavi, sono raffigurati di seguito.
Connettore PROFIBUS
senza collegamento PG/PC
6ES7972-0BA42-0XA0
Connettore PROFIBUS
con collegamento PG/PC
6ES7972-0BB42-0XA0
Resistenza terminale di chiusura bus
La resistenza di chiusura del bus deve essere inserita o disinserita in funzione della
posizione sul bus stesso per garantire il trasferimento corretto dei dati.
Nel primo e ultimo nodo di una linea devono esserci delle resistenze di chiusura, mentre in
tutti gli altri connettori le stesse devono essere disattivate.
Lo schermo del cavo deve essere collegato ad entrambi i lati con una superficie di contatto
ampia.
Nota
Tipo di connettore
In funzione del tipo di connettore occorre rispettare l'assegnazione corretta del connettore
(IN/OUT) in relazione alla resistenza terminale di chiusura.
Convertitori da incasso
84
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
Figura 4-18
Posizione delle resistenze terminali di chiusura bus
Switch degli indirizzi PROFIBUS
L'indirizzo PROFIBUS viene impostato in formato esadecimale tramite due selettori di
codifica. Si possono impostare valori compresi tra 0dec (00hex) e 127dec (7Fhex). Sul selettore di
codifica superiore (H) si imposta il valore esadecimale per 161, mentre su quello inferiore (L)
si imposta il valore esadecimale per 160.
Tabella 4- 19 Switch degli indirizzi PROFIBUS
Selettore di codifica
Valenza
Esempi
21dec
35dec
126dec
15hex
23hex
7Ehex
161 = 16
1
2
7
160 = 1
5
3
E
Impostazione dell'indirizzo PROFIBUS
L'impostazione di fabbrica del selettore di codifica è 0dec (00hex).
L'impostazione degli indirizzi PROFIBUS può avvenire in due modi:
1. Tramite p0918
– Per impostare l'indirizzo del bus per un nodo PROFIBUS con STARTER, impostare
dapprima il selettore di codifica a 0dec (00hex) oppure 127dec (7Fhex).
– Impostare quindi l'indirizzo ad un valore da 1 a126 con il parametro p0918.
2. Tramite lo switch degli indirizzi PROFIBUS sulla Control Unit
– L'impostazione manuale dell'indirizzo a valori tra 1 e 126 avviene tramite i selettori di
codifica. In questo caso con p0918 l'indirizzo viene solo letto.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
85
Installazione elettrica
4.10 Collegamenti dei segnali
Nota
I selettori di codifica con cui si imposta l'indirizzo PROFIBUS si trovano sotto la copertura.
Nota
L'indirizzo 126 è previsto per la messa in servizio. Gli indirizzi PROFIBUS consentiti sono
1 ... 126.
In caso di collegamento di più Control Unit a una sola linea PROFIBUS, impostare gli
indirizzi a valori diversi dall'impostazione di fabbrica. Ogni indirizzo PROFIBUS su una linea
PROFIBUS può essere assegnato una volta sola. L'indirizzo PROFIBUS può essere
impostato in modo assoluto tramite il selettore di codifica o in modo selettivo con il
parametro p0918. Ogni modifica dell'indirizzo di bus diventa attiva solo dopo un'accensione
(POWER ON).
Nel parametro r2057 viene visualizzato l'indirizzo correntemente impostato del selettore di
codifica.
X127: LAN (Ethernet)
Tabella 4- 20 X127 LAN (Ethernet)
Pin
Designazione
Dati tecnici
1
TXP
Dati di trasmissione Ethernet +
2
TXN
Dati di trasmissione Ethernet -
3
RXP
Dati di ricezione Ethernet +
4
Riservato, lasciare libero
5
Riservato, lasciare libero
6
RXN
7
Riservato, lasciare libero
8
Riservato, lasciare libero
Dati di ricezione Ethernet -
Tipo di connettore: presa RJ45
Nota
L'interfaccia LAN (Ethernet) non supporta Auto-MDI(X). Per questo motivo, per collegare gli
apparecchi, si possono utilizzare solo cavi incrociati.
Per scopi diagnostici l'interfaccia LAN X127 è dotata di un LED verde e di un LED giallo che
segnalano le seguenti condizioni:
Convertitori da incasso
86
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
Tabella 4- 21 Stati dei LED dell'interfaccia LAN X127
LED
Colore
Stato
Descrizione
Link Port
-
Spento
Nessuna connessione o errore di connessione
Verde
Luce fissa
Connessione a 10 o 100 Mbit disponibile
-
Spento
Nessuna attività
Giallo
Lampeggio
Invio o ricezione
Activity Port
X140: Interfaccia seriale (RS232)
L'interfaccia seriale consente di collegare il pannello operatore AOP30 per il
funzionamento/la parametrizzazione. L’interfaccia si trova nella parte inferiore della Control
Unit.
Tabella 4- 22 Interfaccia seriale (RS232) X140
Pin
Designazione
Dati tecnici
2
RxD
Dati di ricezione
3
TxD
Dati di invio
5
Massa
Massa di riferimento
Tipo di connettore: presa SUB-D a 9 poli
Nota
Cavo di collegamento con AOP30
Il cavo di collegamento all'AOP30 può avere solo i tre contatti mostrati nel disegno; non si
deve utilizzare un cavo con tutti i contatti occupati.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
87
Installazione elettrica
4.10 Collegamenti dei segnali
T0, T1, T2: Contatti prese di misura
Tabella 4- 23 Contatti prese di misura T0, T1, T2
Presa
Funzione
M
Massa
T0
Contatto prese di misura 0
T1
Contatto prese di misura 1
T2
Contatto prese di misura 2
Dati tecnici
Tensione: 0 … 5 V
Risoluzione: 8 bit
Corrente di carico: max. 3 mA
resistente al cortocircuito permanente
Il potenziale di riferimento è il
morsetto M
Connettore circuiti stampati marca Phoenix Contact, tipo: ZEC 1,0/ 4-ST-3,5 C1 R1,4, numero di
ordinazione: 1893708
Nota
Sezione del conduttore
I contatti delle prese di misura sono unicamente adatti per le sezioni di conduttori da
0,2 mm2 a 1 mm2.
Nota
Uso dei contatti delle prese di misura
I contatti delle prese di misura facilitano le operazioni di messa in servizio e diagnostica. Non
è consentito effettuare il collegamento con il sistema in funzione.
Tasto DIAG
Il tasto DIAG è riservato per funzioni di service.
Convertitori da incasso
88
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
Slot per la scheda di memoria
Figura 4-19
Slot per la scheda di memoria
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
89
Installazione elettrica
4.10 Collegamenti dei segnali
AVVERTENZA
Pericolo di morte per manipolazione del software nell'uso di supporti di memoria rimovibili
La memorizzazione di dati su supporti di memoria rimovibili comporta un rischio elevato di
infezioni da virus o malware. Una parametrizzazione errata può provocare
malfunzionamenti delle macchine e di conseguenza il rischio di morte o di lesioni.
• Proteggere i file sul supporto di memoria rimovibile contro eventuali software
danneggiati adottando i provvedimenti opportuni, ad es. installando degli antivirus.
Nota
Possibile fermo impianto a causa di estrazione e inserimento della scheda di memoria
durante il funzionamento
Se la scheda di memoria viene estratta e inserita durante il funzionamento, si rischia la
perdita dei dati ed eventualmente il fermo impianto.
• Procedere quindi all'estrazione e all'inserimento della scheda di memoria solo con la
Control Unit fuori tensione.
Nota
Senso di inserimento della scheda di memoria
Inserire la scheda di memoria solo come indicato nella figura precedente (freccia destra in
alto).
ATTENZIONE
Danneggiamento della scheda di memoria a causa di campi elettromagnetici o scariche
elettrostatiche
I campi elettromagnetici o le scariche elettrostatiche possono danneggiare la scheda di
memoria e di conseguenza provocare malfunzionamenti.
• Durante l'estrazione e l'inserimento della scheda di memoria rispettare le direttive ESD.
Nota
Possibile perdita di dati in caso di spedizione della Control Unit con scheda di memoria
inserita
In caso di resa di una Control Unit difettosa, i dati memorizzati sulla scheda di memoria
(parametri, firmware, licenze, ecc.) potrebbero andare perduti.
• Non allegare la scheda di memoria alla spedizione, ma conservarla per configurare
l'apparecchio sostitutivo.
Nota
Con la Control Unit si devono impiegare solo schede di memoria SIEMENS.
Convertitori da incasso
90
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
4.10.3
Control Unit CU320-2 PN
Schema dei collegamenti
Figura 4-20
Schema dei collegamenti della Control Unit CU320-2 PN (senza copertura)
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
91
Installazione elettrica
4.10 Collegamenti dei segnali
Figura 4-21
Interfaccia X140 e prese di misura T0 ... T2 - CU320-2 PN (vista dal basso)
ATTENZIONE
Danni funzionali e danneggiamento della Option Board a causa di rimozione e inserimento
durante il funzionamento
In caso di rimozione e inserimento della Option Board durante il funzionamento possono
verificarsi danni funzionali o potrebbe danneggiarsi la Option Board.
• Per questo motivo si deve estrarre e inserire la Option Board solo quando la Control
Unit è in assenza di corrente.
Convertitori da incasso
92
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
Esempio di collegamento
Figura 4-22
Esempio di collegamento CU320-2 PN
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
93
Installazione elettrica
4.10 Collegamenti dei segnali
X100 ... X103: Interfaccia DRIVE-CLiQ
Tabella 4- 24 Interfaccia DRIVE-CLiQ X100 ... X103
Pin
Nome del segnale
Dati tecnici
1
TXP
Dati di invio +
2
TXN
Dati di invio -
3
RXP
Dati di ricezione +
4
riservato, lasciare libero
5
riservato, lasciare libero
6
RXN
7
riservato, lasciare libero
8
riservato, lasciare libero
A
+ (24 V)
Alimentazione di tensione
B
M (0 V)
Massa elettronica
Dati di ricezione -
Tipo di connettore: Presa RJ45
Copertura cieca per interfacce DRIVE-CLiQ (50 pezzi) N. di ordinazione: 6SL3066-4CA00-0AA0
Convertitori da incasso
94
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
X122: Ingressi/uscite digitali
Tabella 4- 25 Morsettiera X122
Pin
Designazione 1)
Dati tecnici
1
DI 0
Tensione (max.): -3 ... 30 V
Assorbimento di corrente tipico: 9 mA a DC 24 V
Separazione di potenziale: il potenziale di riferimento è il morsetto
M1
2
DI 1
3
DI 2
4
DI 3
5
DI 16
6
DI 17
Livello segnale (inclusa ondulazione)
Livello High: +15 ... +30 V
Livello Low: -3 ... +5 V
7
M1
Potenziale di riferimento per i morsetti 1 ... 6
8
M
Massa elettronica
9
DI/DO 8
10
DI/DO 9
11
M
Come ingresso:
Tensione: DC -3 ... +30 V
Corrente assorbita tipica: 9 mA a 24 V
12
DI/DO 10
13
DI/DO 11
14
M
Ritardo in ingresso (tip.):
con "0" → "1": 50 μs
con "1" → "0": 150 μs
Livello segnale (inclusa ondulazione)
Livello High: 15 … 30 V
Livello Low: -3 … +5 V
DI/DO 8, 9, 10 e 11 sono "ingressi rapidi" 2)
Ritardo in ingresso (tip.):
con "0" → "1": 5 μs
con "1" → "0": 50 μs
Come uscita:
Tensione: DC 24 V
Corrente di carico max. per uscita: 500 mA
Resistente al cortocircuito permanente
Ritardo sull'uscita (tip./max):3)
con "0" → "1": 150 μs / 400 μs
con "1" → "0": 75 μs / 100 μs
Frequenza di commutazione:
con carico ohmico: max. 100 Hz
Con carico induttivo: max. 0,5 Hz
Con carico della lampada: max. 10 Hz
Carico della lampada max.: 5 W
Sezione max. collegabile: 1,5 mm²
1)
DI: ingresso digitale; DI/DO: ingresso/uscita digitale bidirezionale; M: massa elettronica, M1: potenziale di riferimento
2)
Gli ingressi rapidi possono essere sfruttati come ingressi del tastatore di misura o ingressi per la tacca di zero ausiliaria.
3)
Indicazione per: Vcc = 24 V; carico 48 Ω; High ("1") = 90 % Vout; Low ("0") = 10 % Vout
La lunghezza massima collegabile del cavo è di 30 m.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
95
Installazione elettrica
4.10 Collegamenti dei segnali
Nota
Garantire la funzione degli ingressi digitali
Un ingresso aperto viene interpretato come "Low".
Per il funzionamento degli ingressi digitali (DI) è necessario collegare il morsetto M1.
Questo si ottiene con uno dei provvedimenti seguenti:
1. concatenando la massa di riferimento degli ingressi digitali
2. ponticellando il morsetto M. (Attenzione: In questo modo viene eliminata la separazione
di potenziale per gli ingressi digitali interessati).
Nota
Se nell'alimentatore 24 V si verificano brevi cadute di tensione, durante l'intervallo
corrispondente le uscite digitali vengono disattivate.
Convertitori da incasso
96
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
X132: Ingressi/uscite digitali
Tabella 4- 26 Morsettiera X132
Pin
Designazione 1)
Dati tecnici
1
DI 4
Tensione (max.): DC -3 ... +30 V
Corrente assorbita tipica: 9 mA a 24 V
Separazione di potenziale: il potenziale di riferimento è il morsetto
M2
2
DI 5
3
DI 6
4
DI 7
5
DI 20
6
DI 21
7
M2
Potenziale di riferimento per i morsetti 1 ... 6
8
M
massa elettronica
9
DI/DO 12
10
DI/DO 13
11
M
Come ingresso:
Tensione: DC -3 ... +30 V
Corrente assorbita tipica: 9 mA a 24 V
12
DI/DO 14
13
DI/DO 15
14
M
Livello segnale (inclusa ondulazione)
Livello High: 15 ... 30 V
Livello Low: -3 … +5 V
Ritardo in ingresso (tip.):
con "0" → "1": 50 μs
con "1" → "0": 150 μs
Livello segnale (inclusa ondulazione)
Livello High: 15 ... 30 V
Livello Low: -3 … +5 V
DI/DO 12, 13, 14 e 15 sono "ingressi rapidi"2)
Ritardo in ingresso (tip.):
con "0" → "1": 5 μs
con "1" → "0": 50 μs
Come uscita:
Tensione: DC 24 V
Corrente di carico max. per uscita: 500 mA
Resistente al cortocircuito permanente
Ritardo sull'uscita (tip./max):3)
con "0" → "1": 150 μs / 400 μs
con "1" → "0": 75 μs / 100 μs
Frequenza di commutazione:
con carico ohmico: max. 100 Hz
Con carico induttivo: max. 0,5 Hz
Con carico della lampada: max. 10 Hz
Carico della lampada max.: 5 W
Sezione max. collegabile: 1,5 mm²
1)
DI: ingresso digitale; DI/DO: ingresso/uscita digitale bidirezionale; M: massa elettronica; M2: potenziale di riferimento
2)
Gli ingressi rapidi possono essere sfruttati come ingressi del tastatore di misura o ingressi per la tacca di zero ausiliaria
3)
Indicazione per: Vcc = 24 V; carico 48 Ω; High ("1") = 90 % Vout; Low ("0") = 10 % Vout
La lunghezza massima collegabile del cavo è di 30 m.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
97
Installazione elettrica
4.10 Collegamenti dei segnali
Nota
Garantire la funzione degli ingressi digitali
Un ingresso aperto viene interpretato come "Low".
Per il funzionamento degli ingressi digitali (DI) è necessario collegare il morsetto M2.
Questo si ottiene con uno dei provvedimenti seguenti:
1. concatenando la massa di riferimento degli ingressi digitali
2. ponticellando il morsetto M. (Attenzione: In questo modo viene eliminata la separazione
di potenziale per gli ingressi digitali interessati).
Nota
Se nell'alimentatore 24 V si verificano brevi cadute di tensione, durante l'intervallo
corrispondente le uscite digitali vengono disattivate.
X124: Alimentazione dell'elettronica
Tabella 4- 27 Morsettiera X124
Morsetto
Funzione
Dati tecnici
+
Alimentazione dell'elettronica
Tensione: DC 24 V (20,4 ... 28,8 V)
+
Alimentazione dell'elettronica
M
Massa elettronica
Corrente assorbita: max. 1,0 A (senza DRIVE-CLiQ
e uscite digitali)
M
Massa elettronica
Corrente max. sul ponticello nel connettore: 20 A
(15 A secondo UL/CSA)
Sezione max. collegabile: 2,5 mm²
La lunghezza massima collegabile del cavo è di 10 m.
Nota
Passaggio della tensione di alimentazione
I due morsetti "+" e "M" sono ponticellati nel connettore. In questo modo viene garantito il
passaggio della tensione di alimentazione.
L'alimentazione ha luogo tramite il morsetto X41.1/2 del Power Module.
Nota
Avvitare la morsettiera
La morsettiera va avvitata con un cacciavite a lama piatta.
Convertitori da incasso
98
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
X127: LAN (Ethernet)
Tabella 4- 28 X127 LAN (Ethernet)
Pin
Designazione
Dati tecnici
1
TXP
Dati di trasmissione Ethernet +
2
TXN
Dati di trasmissione Ethernet -
3
RXP
Dati di ricezione Ethernet +
4
Riservato, lasciare libero
5
Riservato, lasciare libero
6
RXN
7
Riservato, lasciare libero
8
Riservato, lasciare libero
Dati di ricezione Ethernet -
Tipo di connettore: presa RJ45
Nota
L'interfaccia LAN (Ethernet) non supporta Auto-MDI(X). Per questo motivo, per collegare gli
apparecchi, si possono utilizzare solo cavi incrociati.
Per scopi diagnostici l'interfaccia LAN X127 è dotata di un LED verde e di un LED giallo che
segnalano le seguenti condizioni:
Tabella 4- 29 Stati dei LED dell'interfaccia LAN X127
LED
Colore
Stato
Descrizione
Link Port
-
Spento
Nessuna connessione o errore di connessione
Verde
Luce fissa
Connessione a 10 o 100 Mbit disponibile
-
Spento
Nessuna attività
Giallo
Lampeggio
Invio o ricezione
Activity Port
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
99
Installazione elettrica
4.10 Collegamenti dei segnali
X140: Interfaccia seriale (RS232)
L'interfaccia seriale consente di collegare il pannello operatore AOP30 per il
funzionamento/la parametrizzazione. L’interfaccia si trova nella parte inferiore della Control
Unit.
Tabella 4- 30 Interfaccia seriale (RS232) X140
Pin
Designazione
Dati tecnici
2
RxD
Dati di ricezione
3
TxD
Dati di invio
5
Massa
Massa di riferimento
Tipo di connettore: presa SUB-D a 9 poli
Nota
Cavo di collegamento con AOP30
Il cavo di collegamento all'AOP30 può avere solo i tre contatti mostrati nel disegno; non si
deve utilizzare un cavo con tutti i contatti occupati.
Interfaccia PROFINET X150 P1 / P2
Tabella 4- 31 X150 P1 e X150 P2 PROFINET
Pin
Nome del segnale
Dati tecnici
1
RXP
Dati di ricezione +
2
RXN
Dati di ricezione -
3
TXP
Dati di invio +
4
Riservato, lasciare libero
5
Riservato, lasciare libero
6
TXN
7
Riservato, lasciare libero
8
Riservato, lasciare libero
Dati di invio -
Tipo di connettore: connettore femmina RJ45
Tipo di cavo: PROFINET
Convertitori da incasso
100
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
Nota
Cavi di collegamento
Le interfacce PROFINET supportano Auto-MDI(X). Per questo motivo, per collegare gli
apparecchi, si possono utilizzare sia cavi incrociati, sia cavi non incrociati.
Per scopi diagnostici le due interfacce PROFINET sono dotate di un LED verde e di un LED
giallo che segnalano le seguenti condizioni:
Tabella 4- 32 Stati dei LED sull'interfaccia X150 P1 / P2 PROFINET
LED
Colore
Stato
Descrizione
Link Port
-
Spento
Nessuna connessione o errore di connessione
Verde
Luce fissa
Connessione a 10 o 100 Mbit disponibile
-
Spento
Nessuna attività
Giallo
Lampeggio Invio o ricezione di dati su porta Port x
Activity
Port
T0, T1, T2: Contatti prese di misura
Tabella 4- 33 Contatti prese di misura T0, T1, T2
Presa
Funzione
M
Massa
T0
Contatto prese di misura 0
T1
Contatto prese di misura 1
T2
Contatto prese di misura 2
Dati tecnici
Tensione: 0 … 5 V
Risoluzione: 8 bit
Corrente di carico: max. 3 mA
resistente al cortocircuito permanente
Il potenziale di riferimento è il
morsetto M
Connettore circuiti stampati marca Phoenix Contact, tipo: ZEC 1,0/ 4-ST-3,5 C1 R1,4, numero di
ordinazione: 1893708
Nota
Sezione del conduttore
I contatti delle prese di misura sono unicamente adatti per le sezioni di conduttori da
0,2 mm2 a 1 mm2.
Nota
Uso dei contatti delle prese di misura
I contatti delle prese di misura facilitano le operazioni di messa in servizio e diagnostica. Non
è consentito effettuare il collegamento con il sistema in funzione.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
101
Installazione elettrica
4.10 Collegamenti dei segnali
Tasto DIAG
Il tasto DIAG è riservato per funzioni di service.
Slot per la scheda di memoria
Figura 4-23
Slot per la scheda di memoria
Convertitori da incasso
102
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
AVVERTENZA
Pericolo di morte per manipolazione del software nell'uso di supporti di memoria rimovibili
La memorizzazione di dati su supporti di memoria rimovibili comporta un rischio elevato di
infezioni da virus o malware. Una parametrizzazione errata può provocare
malfunzionamenti delle macchine e di conseguenza il rischio di morte o di lesioni.
• Proteggere i file sul supporto di memoria rimovibile contro eventuali software
danneggiati adottando i provvedimenti opportuni, ad es. installando degli antivirus.
Nota
Possibile fermo impianto a causa di estrazione e inserimento della scheda di memoria
durante il funzionamento
Se la scheda di memoria viene estratta e inserita durante il funzionamento, si rischia la
perdita dei dati ed eventualmente il fermo impianto.
• Procedere quindi all'estrazione e all'inserimento della scheda di memoria solo con la
Control Unit fuori tensione.
Nota
Senso di inserimento della scheda di memoria
Inserire la scheda di memoria solo come indicato nella figura precedente (freccia destra in
alto).
ATTENZIONE
Danneggiamento della scheda di memoria a causa di campi elettromagnetici o scariche
elettrostatiche
I campi elettromagnetici o le scariche elettrostatiche possono danneggiare la scheda di
memoria e di conseguenza provocare malfunzionamenti.
• Durante l'estrazione e l'inserimento della scheda di memoria rispettare le direttive ESD.
Nota
Possibile perdita di dati in caso di spedizione della Control Unit con scheda di memoria
inserita
In caso di resa di una Control Unit difettosa, i dati memorizzati sulla scheda di memoria
(parametri, firmware, licenze, ecc.) potrebbero andare perduti.
• Non allegare la scheda di memoria alla spedizione, ma conservarla per configurare
l'apparecchio sostitutivo.
Nota
Con la Control Unit si devono impiegare solo schede di memoria SIEMENS.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
103
Installazione elettrica
4.10 Collegamenti dei segnali
4.10.4
Terminal Module TM31
Descrizione
Il Terminal Module TM31 è un'unità di ampliamento con morsetti. Con il Terminal Module
TM31 è possibile ampliare il numero degli ingressi digitali/ delle uscite digitali disponibili e il
numero degli ingressi analogici/ delle uscite analogiche all'interno di un sistema di
azionamento.
Schema dei collegamenti
Figura 4-24
Terminal Module TM31
Convertitori da incasso
104
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
Figura 4-25
Schema dei collegamenti del Terminal Module TM31
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
105
Installazione elettrica
4.10 Collegamenti dei segnali
X500, X501: Interfaccia DRIVE-CLiQ
Tabella 4- 34 Interfaccia DRIVE-CLiQ X500 e X501
Pin
Nome del segnale
Dati tecnici
1
TXP
Dati di invio +
2
TXN
Dati di invio -
3
RXP
Dati di ricezione +
4
riservato, lasciare libero
5
riservato, lasciare libero
6
RXN
7
riservato, lasciare libero
8
riservato, lasciare libero
A
+ (24 V)
Alimentazione di tensione
B
M (0 V)
Massa elettronica
Dati di ricezione -
Copertura cieca per interfacce DRIVE-CLiQ (50 pezzi) N. di ordinazione: 6SL3066-4CA00-0AA0
X524: Alimentazione dell'elettronica
Tabella 4- 35 Morsettiera X524
Morsetto
Funzione
+
Alimentazione
dell'elettronica
+
Non occupato
M
Massa elettronica
M
Massa elettronica
Dati tecnici
Tensione: DC 24 V (20,4 … 28,8 V)
Corrente assorbita: max. 1,0 A
(senza DRIVE-CLiQ e uscite digitali)
Corrente max. sul ponticello nel connettore: 20 A
(15 A secondo UL/CSA)
Sezione max. collegabile: 2,5 mm²
La lunghezza massima collegabile del cavo è di 10 m.
Nota
I due morsetti "+" e "M" sono ponticellati nel connettore. In questo modo viene garantito il
passaggio della tensione di alimentazione.
La corrente assorbita aumenta del valore del nodo DRIVE-CLiQ e delle uscite digitali.
Nota
La morsettiera va avvitata con cacciavite a lama piatta.
Convertitori da incasso
106
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
X520: 4 ingressi digitali
Tabella 4- 36 Morsettiera X520
Morsetto
Designazione 1)
1
DI 0
2
DI 1
3
DI 2
4
DI 3
5
M1
6
M
Dati tecnici
Tensione: - 3 … +30 V
Corrente assorbita tipica: 10 mA a DC 24 V
Ritardo di ingresso:
con "0" verso "1": tip. 50 µs max. 100 µs
con "1" verso "0": tip. 130 µs max. 150 µs
Separazione di potenziale:
il potenziale di riferimento è il morsetto M1
Livello segnale (inclusa ondulazione)
Livello High: 15 ... 30 V
Livello Low: -3 … +5 V
1)
DI: ingresso digitale; M1: massa di riferimento; M: massa elettronica
Sezione max. collegabile: 1,5 mm²
Nota
Garantire la funzione degli ingressi digitali
Un ingresso aperto viene interpretato come "Low".
Per il funzionamento degli ingressi digitali (DI) è necessario collegare il morsetto M1.
Questo si ottiene con uno dei provvedimenti seguenti:
1. concatenando la massa di riferimento degli ingressi digitali
2. ponticellando il morsetto M. (Attenzione: In questo modo viene eliminata la separazione
di potenziale per gli ingressi digitali interessati).
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
107
Installazione elettrica
4.10 Collegamenti dei segnali
X530: 4 ingressi digitali
Tabella 4- 37 Morsettiera X530
Morsetto
Designazione 1)
1
DI 4
2
DI 5
3
DI 6
4
DI 7
5
M2
6
M
Dati tecnici
Tensione: - 3 … +30 V
Corrente assorbita tipica: 10 mA a DC 24 V
Ritardo di ingresso:
con "0" > "1": tip. 50 µs max. 100 µs
con "1" verso "0": tip. 130 µs max. 150 µs
Separazione di potenziale:
il potenziale di riferimento è il morsetto M2
Livello segnale (inclusa ondulazione)
Livello High: 15 … 30 V
Livello Low: -3 … +5 V
1)
DI: ingresso digitale; M2: massa di riferimento; M: massa elettronica
Sezione max. collegabile: 1,5 mm²
Nota
Garantire la funzione degli ingressi digitali
Un ingresso aperto viene interpretato come "Low".
Per il funzionamento degli ingressi digitali (DI) è necessario collegare il morsetto M2.
Questo si ottiene con uno dei provvedimenti seguenti:
1. concatenando la massa di riferimento degli ingressi digitali
2. ponticellando il morsetto M. (Attenzione: In questo modo viene eliminata la separazione
di potenziale per gli ingressi digitali interessati).
Convertitori da incasso
108
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
X521: 2 ingressi analogici (ingressi differenziali)
Tabella 4- 38 Morsettiera X521
Morsetto
Designazione 1)
Dati tecnici
1
AI 0+
2
AI 0-
3
AI 1+
Gli ingressi analogici possono essere commutati tra
ingresso di corrente e ingresso di tensione
utilizzando gli interruttori S5.0 e S5.1.
4
AI 1-
Come ingresso di tensione:
-10 V ... +10 V; Ri > 100 kΩ
Risoluzione: 11 bit + segno
Come ingresso di corrente:
-20 ... +20 mA; Ri = 250 Ω
Risoluzione: 10 bit + segno
1)
5
P10
6
M
7
N10
8
M
Tensione ausiliaria:
P10 = 10 V
N10 = -10 V
Resistente al cortocircuito permanente
AI: ingresso analogico; P10/N10: tensione ausiliaria; M: Massa di riferimento
Sezione max. collegabile: 1,5 mm²
ATTENZIONE
Danni o funzionamento anomalo a causa di valori di tensione non ammessi
Se l'ingresso analogico di corrente conduce correnti di intensità superiore a ±35 mA, il
componente può andare distrutto.
Per evitare risultati errati nella conversione analogico-digitale, il campo di sincronismo non
deve essere violato.
• La tensione di ingresso deve restare compresa tra -30 V e +30 V (limite di distruzione).
• La tensione di modo comune deve restare compresa tra -10 V e +10 V (limite di errore).
• La controtensione alle uscite della tensione ausiliaria deve rientrare nel campo -15 V ...
+15 V.
Nota
L'alimentazione di tensione degli ingressi analogici può avvenire internamente oppure
tramite una sorgente di tensione esterna.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
109
Installazione elettrica
4.10 Collegamenti dei segnali
S5: Convertitore tensione/corrente AI0, AI1
Tabella 4- 39 Convertitore tensione/corrente S5
Interruttore
Funzione
S5.0
Commutazione della tensione (V) / corrente (I) Al0
S5.1
Commutazione della tensione (V) / corrente (I) Al1
Nota
Stato di fornitura:
Al momento della fornitura entrambi gli interruttori sono impostati su misura della tensione
(interruttore su "V").
X522: 2 uscite analogiche, collegamento sensore temperatura
Tabella 4- 40 Morsettiera X522
Morsetto
Designazione 1)
1
AO 0V+
2
AO 0-
3
AO 0C+
4
AO 1V+
5
AO 1-
6
AO 1C+
Dati tecnici
I seguenti segnali di uscita sono impostabili
mediante parametri:
Tensione: -10 ... +10 V (max. 3 mA)
Corrente 1: 4 ... 20 mA (resistenza di carico max.
≤ 500 Ω)
Corrente 2: -20 ... +20 mA (resistenza di carico max.
≤ 500 Ω)
Corrente 3: 0 ... 20 mA (resistenza di carico max.
≤ 500 Ω)
Risoluzione: 11 bit + segno
Resistente al cortocircuito permanente
1)
7
+Temp
8
-Temp
Sensore di temperatura KTY84-1C130/PTC
Corrente di misura tramite collegamento del sensore
di temperatura: 2 mA
AO xV: Tensione uscita analogica; AO xC: uscita analogica corrente
Sezione max. collegabile: 1,5 mm²
Convertitori da incasso
110
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
AVVERTENZA
Pericolo di morte per folgorazione in caso di scariche di tensione sul sensore di
temperatura
Nei motori senza separazione elettrica sicura dei sensori di temperatura possono verificarsi
scariche di tensione ai danni dell'elettronica dei segnali.
• Utilizzare sensori di temperatura che soddisfano i requisiti di separazione sicura.
ATTENZIONE
Danni o funzionamento anomalo a causa di valori di tensione non ammessi
Se la controtensione assume un valore non consentito, possono verificarsi danni del
componente e anomalie funzionali.
• La controtensione alle uscite deve rientrare nel campo -15 V ... +15 V.
ATTENZIONE
Danneggiamento del motore in caso di sensore di temperatura KTY collegato in modo
errato
Un sensore di temperatura KTY collegato a poli invertiti non è in grado di riconoscere un
surriscaldamento del motore. Il surriscaldamento può provocare un danno al motore.
• Collegare un sensore di temperatura KTY rispettando la corretta polarità.
X540: tensione ausiliaria ingressi digitali
Tabella 4- 41 Morsettiera X540
Morsetto
Designazione
Dati tecnici
8
+24 V
Tensione: DC +24 V
7
+24 V
6
+24 V
5
+24 V
Corrente di carico max. complessiva della tensione
ausiliaria +24 V dei morsetti X540 e X541 insieme:
150 mA
4
+24 V
3
+24 V
2
+24 V
1
+24 V
Resistente al cortocircuito permanente
Sezione max. collegabile: 1,5 mm²
Nota
Impiego dell'alimentazione di tensione
Questa alimentazione di tensione serve esclusivamente per alimentare gli ingressi digitali.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
111
Installazione elettrica
4.10 Collegamenti dei segnali
X541: 4 ingressi/uscite digitali senza separazione di potenziale
Tabella 4- 42 Morsettiera X541
Morsetto
Designazione 1)
6
M
5
DI/DO 11
4
DI/DO 10
3
DI/DO 9
2
DI/DO 8
1
+24 V
Dati tecnici
Tensione ausiliaria:
Tensione: DC +24 V
Corrente di carico max. complessiva della tensione
ausiliaria +24 V dei morsetti X540 e X541 insieme:
150 mA
Come ingresso:
Tensione: -3 … 30 V
Corrente assorbita tipica: 10 mA con DC 24 V
Ritardo di ingresso:
- con "0" > "1": tip. 50 μs
con "1" verso "0". tip. 100 μs
Come uscita:
Tensione: DC 24 V
Corrente di carico max. per uscita: 500 mA
Max. corrente totale delle uscite (incluse le correnti
negli ingressi): 100 mA / 1 A (parametrizzabile)
Resistente a cortocircuito permanente
Ritardo di uscita:
con "0" verso "1": tip. 150 µs con carico ohmico 0,5
A (max. 500 µs)
con "1" verso "0": tip. 50 µs con carico ohmico 0,5 A
Frequenza di commutazione:
con carico ohmico: max. 100 Hz
Con carico induttivo: max. 0,5 Hz
Con carico della lampada: max. 10 Hz
Carico della lampada max.: 5 W
1)
DI/DO: ingresso/uscita digitale: M: massa elettronica
Sezione max. collegabile: 1,5 mm2
Nota
Ingresso aperto
Un ingresso aperto viene interpretato come "Low".
Nota
Se nell'alimentatore 24 V si verificano brevi cadute di tensione, durante l'intervallo
corrispondente le uscite digitali vengono disattivate.
Convertitori da incasso
112
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
X542: 2 uscite a relè (contatti di scambio)
Tabella 4- 43 Morsettiera X542
Morsetto
Designazione 1)
1
DO 0.NC
2
DO 0.COM
3
DO 0.NO
4
DO 1.NC
5
DO 1.COM
6
DO 1.NO
Dati tecnici
Tipo di contatto: contatto di scambio, corrente di
carico max.: 8 A
Tensione di commutazione max.: 250 VAC, 30 VDC
Potenza di commutazione max. a 250 VAC: 2000 VA
(cosϕ = 1)
Potenza di commutazione max. a 250 VAC: 750 VA
(cosϕ = 0,4)
Potenza di commutazione max. a 30 VDC: 240 W
(carico ohmico)
Corrente minima necessaria: 100 mA
Ritardo di uscita: ≤ 20 ms 2)
Categoria di sovratensione: Classe II secondo
EN 60664-1
1)
DO: uscita digitale, NO: contatto normalmente aperto, NC: contatto normalmente chiuso, COM:
Contatto centrale
2)
In funzione della parametrizzazione e della tensione di alimentazione (P24) del TM31
Sezione max. collegabile: 2,5 mm²
Nota
Conduttore di protezione supplementare
Se le uscite a relè vengono collegate a AC 230 V, il Terminal Module deve essere collegato
a terra con un ulteriore conduttore di protezione da 6 mm².
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
113
Installazione elettrica
4.10 Collegamenti dei segnali
4.10.5
Sensor Module Cabinet-Mounted SMC30
4.10.5.1
Descrizione
Per rilevare il numero di giri attuale del motore viene utilizzato il modulo encoder SMC30. I
segnali provenienti dall'encoder rotativo vengono convertiti e messi a disposizione della
regolazione tramite l'interfaccia DRIVE-CLiQ per la relativa valutazione.
In combinazione con SINAMICS G130 è possibile collegare i seguenti encoder al modulo
encoder SMC30:
● Encoder TTL
● Encoder HTL
● Sensore temperatura KTY o PTC
Tabella 4- 44 Encoder collegabili con tensione di alimentazione
Tipo di encoder
X520 (SUB-D)
X521 (morsetto)
X531 (morsetto)
Sorveglianza
rottura cavo
Remote Sense
HTL bipolare 24 V
sì
sì
sì
sì
no
HTL unipolare 24 V
sì
sì
sì
no
no
TTL bipolare 24 V
sì
sì
sì
sì
no
TTL bipolare 5 V
sì
sì
sì
sì
su X520
TTL unipolare
no
no
no
no
no
Tabella 4- 45 Lunghezze max. dei cavi di segnale
Tipo di encoder
Lunghezza max. dei cavi di segnale in m
TTL
100
HTL unipolare
100
HTL bipolare
300
Nota
Preferenza ai collegamenti bipolari
A causa dello standard fisico di trasmissione più robusto, per gli encoder HTL va privilegiato
in linea di massima il collegamento bipolare. Solo se il tipo di encoder impiegato non fornisce
alcun segnale controfase va utilizzato il collegamento unipolare.
Nota
Collegare un solo sistema encoder
Al modulo encoder può essere collegato un solo encoder, su X520 o su X521 / X531.
L'interfaccia di volta in volta non utilizzata non deve essere occupata.
Convertitori da incasso
114
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
Tabella 4- 46 Specificazione dei sistemi di misura collegabili
Parametri
Designazione
Livello del segnale high
(TTL bipolare su X520 o X521/X531)1)
Soglia
Min.
Max.
Unità
UHdiff
2
5
V
Livello del segnale low
(TTL bipolare su X520 o X521/X531)1)
ULdiff
-5
-2
V
Livello del segnale high
(HTL unipolare)
UH4)
High
17
VCC
V
Low
10
VCC
V
Livello del segnale low
(HTL unipolare)
UL4)
High
0
7
V
Low
0
2
V
Livello del segnale high
(HTL bipolare)2)
UHdiff
3
VCC
V
Livello del segnale low
(HTL bipolare)2)
ULdiff
-VCC
-3
V
Frequenza del segnale
fS
-
300
kHz
Distanza dei fronti
tmin
100
-
Impulso di zero inattivo - tempo
(prima e dopo A=B=high)
tLo
Impulso di zero attivo - tempo
(quando A=B=high e così via)
tHi
ns
640
(tALo-BHi - tHi)/2
3)
ns
640
tALo-BHi - 2 x tLo 3)
ns
1)
Altri livelli dei segnali conformi alla norma RS422.
2)
Il livello assoluto dei singoli segnali è compreso tra 0 V e VCC del sistema di misura.
3) tALo-BHi
non è un valore specificato, bensì la distanza temporale tra il fronte di discesa della
traccia A e il secondo fronte di salita della traccia B.
La soglia è impostabile tramite p0405.04 (soglia di commutazione) (allo stato di fornitura
l'impostazione è "Bassa").
4)
Figura 4-26
Andamento del segnale della traccia A e B tra due fronti: Tempo tra due fronti negli
encoder a impulsi
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
115
Installazione elettrica
4.10 Collegamenti dei segnali
Figura 4-27
Posizione dell'impulso di zero rispetto ai segnali di traccia
Per gli encoder con alimentazione a 5 V su X521/X531 la lunghezza dei cavi dipende dalla
corrente dell'encoder (vale per una sezione dei cavi di 0,5 mm²):
Figura 4-28
Lunghezza dei cavi di segnale in funzione dell'assorbimento di corrente dell'encoder
Negli encoder senza Remote Sense la massima lunghezza consentita del cavo è di 100 m
(motivo: la caduta di tensione dipende dalla lunghezza del conduttore e dalla corrente del
trasduttore).
Convertitori da incasso
116
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
Figura 4-29
Modulo encoder SMC30
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
117
Installazione elettrica
4.10 Collegamenti dei segnali
4.10.5.2
Collegamento
X500: Interfaccia DRIVE-CLiQ
Tabella 4- 47 Interfaccia DRIVE-CLiQ X500
Pin
Nome del segnale
Dati tecnici
1
TXP
Dati di invio +
2
TXN
Dati di invio -
3
RXP
Dati di ricezione +
4
riservato, lasciare libero
5
riservato, lasciare libero
6
RXN
7
riservato, lasciare libero
8
riservato, lasciare libero
A
+ (24 V)
Alimentazione di tensione
B
M (0 V)
Massa elettronica
Dati di ricezione -
Copertura cieca per interfacce DRIVE-CLiQ (50 pezzi) N. di ordinazione: 6SL3066-4CA00-0AA0
X524: Alimentazione dell'elettronica
Tabella 4- 48 Morsettiera X524
Morsetto
Funzione
Dati tecnici
+
Alimentazione dell'elettronica
Tensione: DC 24 V (20,4 ... 28,8 V)
+
Alimentazione dell'elettronica
Corrente assorbita: max. 0,55 A
M
Massa elettronica
M
Massa elettronica
Corrente max. sul ponticello nel connettore: 20 A
(15 A secondo UL/CSA)
Sezione max. collegabile: 2,5 mm²
La lunghezza massima collegabile del cavo è di 10 m.
Nota
Passaggio della tensione di alimentazione
I due morsetti "+" e "M" sono collegati a ponticello nel connettore e non nell'apparecchiatura.
In questo modo viene garantito il passaggio della tensione di alimentazione.
L'alimentazione ha luogo tramite il morsetto X41:1/2 del Power Module.
Convertitori da incasso
118
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
X520: collegamento encoder 1 per encoder HTL/TTL con rilevamento rottura cavo
Tabella 4- 49 Collegamento encoder X520
Pin
Nome del segnale
Dati tecnici
1
+ Temp 1)
2
riservato, lasciare libero
3
riservato, lasciare libero
4
P-Encoder 5 V / 24 V
Alimentazione encoder
5
P-Encoder 5 V / 24 V
Alimentazione encoder
6
P-Sense
Ingresso Sense alimentazione encoder
7
M-Encoder (M)
Massa alimentazione encoder
8
- Temp
Collegamento sensore temperatura KTY84-1C130/PTC
9
M-Sense
Massa ingresso Sense
10
R
Segnale di riferimento R
11
R*
Segnale di riferimento inverso R
12
B*
Segnale incrementale inverso B
13
B
Segnale incrementale B
14
A*
Segnale incrementale inverso A
15
A
Segnale incrementale A
1)
Collegamento sensore temperatura KTY84-1C130/PTC
Tipo di connettore: Presa SUB-D a 15 poli
Corrente di misura tramite collegamento del sensore di temperatura: 2 mA
1)
Precisione della misura di temperatura:
- KTY: ±7 °C (inclusa valutazione)
- PTC: ±5 °C (inclusa valutazione)
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
119
Installazione elettrica
4.10 Collegamenti dei segnali
AVVERTENZA
Pericolo di morte per folgorazione in caso di scariche di tensione sul sensore di
temperatura
Nei motori senza separazione elettrica sicura dei sensori di temperatura possono verificarsi
scariche di tensione ai danni dell'elettronica dei segnali.
• Utilizzare solo sensori di temperatura che soddisfano i requisiti di separazione sicura.
ATTENZIONE
Guasti dell'apparecchiatura dovuti a cavi dei termosensori non schermati o non posati
correttamente
I cavi dei termosensori non schermati o non posati correttamente possono comportare
interferenze dal lato di potenza all'elettronica di elaborazione dei segnali. Ciò può
provocare gravi anomalie su tutti i segnali (messaggi di errore) fino all'avaria dei singoli
componenti (distruzione delle apparecchiature).
• Come cavi dei sensori di temperatura utilizzare esclusivamente cavi schermati.
• Per i cavi dei sensori di temperatura che vengono condotti insieme al cavo del motore,
utilizzare esclusivamente cavi intrecciati a coppie e schermati separatamente.
• Collegare la schermatura su entrambi i lati con una superficie di contatto ampia al
potenziale di massa.
• Raccomandazione: Utilizzare cavi Motion Connect appropriati.
ATTENZIONE
Danneggiamento del motore in caso di sensore di temperatura KTY collegato in modo
errato
Un sensore di temperatura KTY collegato a poli invertiti non è in grado di riconoscere un
surriscaldamento del motore. Il surriscaldamento può provocare un danno al motore.
• Collegare un sensore di temperatura KTY rispettando la corretta polarità.
ATTENZIONE
Danneggiamento dell'encoder per effetto della tensione di alimentazione errata
La tensione di alimentazione dell'encoder è parametrizzabile a 5 V o 24 V. Una
parametrizzazione errata può danneggiare l'encoder.
• Selezionare la tensione di alimentazione adeguata.
Convertitori da incasso
120
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
X521 / X531: collegamento encoder 2 per encoder HTL/TTL con rilevamento rottura cavo
Tabella 4- 50 Collegamento encoder X521
Morsetto
Nome del segnale
Dati tecnici
1
A
Segnale incrementale A
2
A*
Segnale incrementale inverso A
3
B
Segnale incrementale B
4
B*
Segnale incrementale inverso B
5
R
Segnale di riferimento R
6
R*
Segnale di riferimento inverso R
7
CTRL
Segnale di controllo
8
M
Massa tramite un'induttanza
Sezione max. collegabile: 1,5 mm²
Nota
Utilizzo di encoder unipolari HTL
Per il funzionamento degli encoder HTL unipolari è necessario ponticellare A*, B*, R* sulla
morsettiera con M_Encoder (X531).
Tabella 4- 51 Collegamento encoder X531
Morsetto
Nome del segnale
Dati tecnici
1
P-Encoder 5 V / 24 V
Alimentazione encoder
2
M-Encoder
Massa alimentazione encoder
3
- Temp
Collegamento sensore temperatura KTY84-1C130/PTC
4
+ Temp 1)
5
riservato, lasciare libero
6
riservato, lasciare libero
7
riservato, lasciare libero
8
riservato, lasciare libero
1)
Collegamento sensore temperatura KTY84-1C130/PTC
Sezione max. collegabile: 1,5 mm²
Corrente di misura tramite collegamento del sensore di temperatura: 2 mA
1)
Precisione della misura di temperatura:
- KTY: ±7 °C (inclusa valutazione)
- PTC: ±5 °C (inclusa valutazione)
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
121
Installazione elettrica
4.10 Collegamenti dei segnali
AVVERTENZA
Pericolo di morte per folgorazione in caso di scariche di tensione sul sensore di
temperatura
Nei motori senza separazione elettrica sicura dei sensori di temperatura possono verificarsi
scariche di tensione ai danni dell'elettronica dei segnali.
• Utilizzare solo sensori di temperatura che soddisfano i requisiti di separazione sicura.
ATTENZIONE
Guasti dell'apparecchiatura dovuti a cavi dei termosensori non schermati o non posati
correttamente
I cavi dei termosensori non schermati o non posati correttamente possono comportare
interferenze dal lato di potenza all'elettronica di elaborazione dei segnali. Ciò può
provocare gravi anomalie su tutti i segnali (messaggi di errore) fino all'avaria dei singoli
componenti (distruzione delle apparecchiature).
• Come cavi dei sensori di temperatura utilizzare esclusivamente cavi schermati.
• Per i cavi dei sensori di temperatura che vengono condotti insieme al cavo del motore,
utilizzare esclusivamente cavi intrecciati a coppie e schermati separatamente.
• Collegare la schermatura su entrambi i lati con una superficie di contatto ampia al
potenziale di massa.
• Raccomandazione: Utilizzare cavi Motion Connect appropriati.
ATTENZIONE
Danneggiamento del motore in caso di sensore di temperatura KTY collegato in modo
errato
Un sensore di temperatura KTY collegato a poli invertiti non è in grado di riconoscere un
surriscaldamento del motore. Il surriscaldamento può provocare un danno al motore.
• Collegare un sensore di temperatura KTY rispettando la corretta polarità.
ATTENZIONE
Danneggiamento dell'encoder per effetto della tensione di alimentazione errata
La tensione di alimentazione dell'encoder è parametrizzabile a 5 V o 24 V. Una
parametrizzazione errata può danneggiare l'encoder.
• Selezionare la tensione di alimentazione adeguata.
Nota
Schermatura del cavo nel collegamento dell'encoder tramite morsetti
Prestare attenzione che nel collegamento dell'encoder tramite morsetti la schermatura dei
cavi venga connessa al modulo.
Convertitori da incasso
122
Istruzioni operative, 04/2014, A5E00386872A
Installazione elettrica
4.10 Collegamenti dei segnali
4.10.5.3
Esempi di collegamento
Esempio di collegamento 1: encoder HTL, bipolare, senza tacca di zero -> p0405 = 9 (hex)
Figura 4-30
Esempio di collegamento 1: encoder HTL, bipolare, senza tacca di zero
Esempio di collegamento 2: encoder TTL, unipolare, senza traccia di zero -> p0405 = A (hex)
Figura 4-31
Esempio di collegamento 2: encoder TTL, unipolare, senza traccia di zero
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
123
Installazione elettrica
4.10 Collegamenti dei segnali
4.10.6
Terminal Module TM54F
Il Terminal Module TM54F dispone di ingressi e uscite digitali sicure per il comando delle
Safety Integrated Extended Functions di SINAMICS.
Il TM54F offre 4 uscite digitali fail-safe e 10 ingressi digitali fail-safe. Un'uscita digitale failsafe è costituita da un'uscita a commutazione DC 24 V e da una commutazione a massa
nonché da un ingresso digitale per la verifica dello stato di commutazione. Un ingresso
digitale fail safe è costituito da due ingressi digitali.
Figura 4-32
Terminal Module TM54F
Nota
Manuale di guida alle funzioni Safety Integrated
Una descrizione dettagliata del funzionamento completo e dell'uso delle funzioni Safety
Integrated è contenuta nel "Manuale di guida alle funzioni Safety Integrated". Questo
manuale si trova nel CD della documentazione fornito.
Convertitori da incasso
124
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.1
5
Contenuto del capitolo
Questo capitolo descrive:
● La prima messa in servizio dell'apparecchio da incasso (inizializzazione) con STARTER e
AOP30
– L'impostazione dei dati del motore (messa in servizio dell'azionamento)
– L'impostazione dei parametri più importanti (messa in servizio di base) e conclusione
con l'identificazione del motore
● Salvataggio dei dati
● Ripristino dei parametri all'impostazione di fabbrica
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
125
Messa in servizio
5.2 Tool di messa in servizio STARTER
Avvertenze importanti prima della messa in servizio
L'apparecchio da incasso offre un numero variabile di interconnessioni di segnale a seconda
delle unità aggiuntive collegate. Per permettere alla regolazione del convertitore di elaborare
adeguatamente i segnali, occorre effettuare alcune impostazioni lato software.
Al primo avvio della Control Unit e durante la prima messa in servizio vengono eseguite delle
macro di parametri che applicano le impostazioni necessarie.
Le impostazioni effettuate sono documentate nell'Appendice.
Dopo il primo avvio o dopo la prima messa in servizio e anche dopo un reset dei parametri
alle impostazioni di fabbrica, alcuni parametri si scostano dai valori riportati come
impostazioni di fabbrica nel Manuale delle liste.
AVVERTENZA
Pericolo di morte per malfunzionamenti della macchina dovuti a parametrizzazione errata o
modificata
Una parametrizzazione errata o modificata può provocare malfunzionamenti delle
macchine con conseguente pericolo di lesioni che possono mettere anche in pericolo la vita
della persone.
• Proteggere le parametrizzazioni dall'accesso non autorizzato.
• Gestire gli eventuali malfunzionamenti con provvedimenti adeguati (ad es., arresto di
emergenza oppure OFF di emergenza).
5.2
Tool di messa in servizio STARTER
Descrizione
Il tool per la messa in servizio STARTER consente di configurare e mettere in servizio gli
azionamenti e i sistemi di azionamento SINAMICS. È possibile effettuare la configurazione
dell'azionamento con il wizard di configurazione azionamento STARTER.
Nota
Guida in linea di STARTER
In questo capitolo viene descritta la messa in servizio con STARTER. STARTER dispone di
un'ampia guida online che spiega dettagliatamente tutte le procedure e le possibilità di
impostazione del sistema.
In questo capitolo vengono quindi trattate solo alcune fasi della messa in servizio.
Versione STARTER richiesta
Per la messa in servizio di SINAMICS con versione firmware V4.7 è necessaria la seguente
versione STARTER:
● STARTER V4.4
Convertitori da incasso
126
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.2 Tool di messa in servizio STARTER
Requisiti per l'installazione di STARTER
Hardware
Devono essere rispettati i seguenti requisiti minimi:
● PG o PC
● Pentium III min. 1 GHz (consigliabile > 1 GHz)
● Memoria di lavoro 1 GB (consigliabile 2 GB)
● Risoluzione schermo 1024 × 768 pixel, 16 bit profondità colore
● Spazio libero sul disco rigido > 3 GB
Software
Devono essere rispettati i requisiti minimi seguenti per il software per poter impiegare
STARTER senza l'installazione di STEP 7:
● Microsoft Internet Explorer V6.0 o successivo
Sistemi operativi a 32 bit:
● Microsoft Windows Server 2003 SP2
● Microsoft Windows Server 2008
● Microsoft Windows XP Professional SP2 *) e SP3
● Microsoft Windows 7 Professional incl. SP1
● Microsoft Windows 7 Ultimate incl. SP1
● Microsoft Windows 7 Enterprise incl. SP1 (installazione standard)
Sistemi operativi a 64 bit:
● Microsoft Windows 7 Professional SP1
● Microsoft Windows 7 Ultimate SP1
● Microsoft Windows 7 Enterprise SP1 (installazione standard)
● Microsoft Windows Server 2008 R2
*)
Ampiezza del test limitata
Per le versioni "native" di Windows XP in lingue asiatiche, il Setup di STARTER può essere
eseguito solo se si tratta di una versione MUI di Windows XP o Windows 7.
Per l'apertura degli schemi logici nella guida in linea è necessario Acrobat Reader V5.0 o
versione successiva.
Nota
Requisiti in relazione a STEP7
Se STARTER viene impiegato assieme ad altri componenti di STEP7, valgono i requisiti dei
rispettivi componenti S7.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
127
Messa in servizio
5.2 Tool di messa in servizio STARTER
5.2.1
Installazione di STARTER
STARTER viene installato mediante il file "Setup" contenuto nel DVD fornito con il prodotto.
Con un doppio clic sul file "Setup", il wizard di installazione guida l'utente attraverso tutte le
fasi dell'installazione di STARTER.
Nota
Durata dell'installazione
La durata dell'installazione dipende dalla potenza del computer e dal supporto da cui viene
eseguita l'installazione (ad es. DVD, disco rigido, rete locale). Si consiglia di eseguire
l'installazione da un supporto dati locale.
Convertitori da incasso
128
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.2 Tool di messa in servizio STARTER
5.2.2
Descrizione della superficie operativa di STARTER
STARTER presenta le seguenti 4 aree operative:
Figura 5-1
Interfaccia operativa di STARTER
Area operativa
Descrizione
1: Barra degli strumenti
In quest'area le funzioni maggiormente utilizzate sono accessibili mediante simboli.
2: Navigazione di progetto
In quest'area vengono visualizzati gli elementi e gli oggetti presenti nel progetto.
3: Area di lavoro
In quest'area vengono eseguite le modifiche degli apparecchi di azionamento.
4: Visualizzazione dei
dettagli
In quest'area vengono visualizzate informazioni dettagliate, ad es. in riferimento ad anomalie
e avvisi.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
129
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
5.3
Sequenza di messa in servizio con STARTER
Procedura di base con STARTER
STARTER utilizza una serie di finestre di dialogo per il rilevamento dei dati necessari per
l'apparecchio di azionamento.
Nota
Valori preimpostati nelle finestre di dialogo
Queste finestre di dialogo contengono impostazioni predefinite che l'utente deve
eventualmente adattare alla propria applicazione e alla configurazione.
Questa è una procedura voluta!
Obiettivo: se l'impostazione dei dati di configurazione avviene in modo preciso e ponderato,
è possibile evitare scostamenti tra i dati di progetto e i dati dell'apparecchio di azionamento
(rilevabili in modalità online).
5.3.1
Creazione di un progetto
Fare clic sul simbolo STARTER sul desktop oppure selezionare (ad es. in Windows 7) il
comando di menu Start > Tutti i programmi > STARTER > STARTER nel menu Start di
Windows per avviare il tool di messa in servizio STARTER.
Dopo il primo avvio viene visualizzata la schermata di base con le finestre di dialogo:
● Guida introduttiva STARTER
● Wizard di progetto STARTER
Le fasi della messa in servizio vengono elencate di seguito.
Convertitori da incasso
130
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Accesso al wizard di progetto di STARTER
Figura 5-2
Schermata di base del tool di parametrizzazione e messa in servizio STARTER
⇒ Chiudere la finestra di dialogo STARTER Guida introduttiva Messa in servizio
dell'azionamento tramite Guida HTML > Chiudi
La guida in linea può essere disattivata in modo permanente deselezionando Strumenti >
Impostazioni > Workbench > Visualizza "Guida introduttiva" all'avvio.
Nota
Wizard progetto
Se si disattiva il campo Visualizza Wizard all'avvio, il wizard di progetto non viene più
visualizzato al successivo avvio di STARTER.
Il wizard di progetto può essere aperto selezionando Progetto > Nuovo con wizard.
La guida in linea può essere visualizzata in qualsiasi momento selezionando Strumenti >
Impostazioni > Workbench > Visualizza "Guida introduttiva" all'avvio.
STARTER dispone di un'ampia guida online.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
131
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Il wizard di progetto di STARTER
Figura 5-3
Wizard di progetto STARTER
⇒ Fare clic su Raggruppa apparecchi di azionamento offline… nel wizard di progetto di
STARTER
Figura 5-4
Creazione nuovo progetto
⇒ Immettere il nome del progetto ed eventualmente autore, percorso di memorizzazione e
un commento.
⇒ Fare clic su Avanti > per impostare l'interfaccia PG/PC.
Convertitori da incasso
132
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Figura 5-5
Impostazione dell'interfaccia
⇒ In Punto di accesso: selezionare l'interfaccia in funzione della configurazione
dell'apparecchio:
● Selezionare l'accesso S7ONLINE (STEP7) se il collegamento con il dispositivo di
azionamento è realizzato tramite PROFINET o PROFIBUS.
● Selezionare l'accesso DEVICE se il collegamento con il dispositivo di azionamento
avviene tramite l'interfaccia Ethernet.
⇒ Fare clic su PG/PC ... e impostare l'interfaccia in base alla configurazione
dell'apparecchio.
I pulsanti disponibili sono Proprietà..., Copia... e Seleziona....
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
133
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Figura 5-6
Impostazione interfaccia
Nota
Presupposti
Per eseguire questa parametrizzazione dell'interfaccia, è necessario che sia installata
un'adeguata scheda di interfaccia, ad es.: PC Adapter (PROFIBUS).
Convertitori da incasso
134
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Figura 5-7
Impostazione interfaccia - Proprietà
Nota
Attivazione dell'opzione PG/PC come unico master del bus
L'opzione PG/PC come unico master del bus deve essere attivata se non sono disponibili
altri master (PC, S7, ecc.) sul bus.
Nota
Progettazione anche senza interfaccia
Anche se nel PC non è prevista alcuna interfaccia PROFIBUS, è possibile creare progetti e
assegnare indirizzi PROFIBUS per gli oggetti di azionamento.
Vengono proposti solo gli indirizzi bus disponibili nel progetto. In questo modo si evita che gli
indirizzi bus vengano assegnati due volte.
In caso di necessità è possibile immettere manualmente anche un indirizzo già assegnato.
⇒ Al termine fare clic su OK per confermare le impostazioni e tornare al wizard di progetto.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
135
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Figura 5-8
Impostazione dell'interfaccia terminata
⇒ Fare clic su Avanti > per configurare un dispositivo di azionamento nel wizard di progetto.
Figura 5-9
Inserimento di un dispositivo di azionamento
⇒ Selezionare i seguenti dati dagli elenchi a discesa:
Apparecchio: Sinamics
Tipo: G130 CU320-2 DP o G130 CU320-2 PN
Versione: 4.7
Indirizzo apparecchio di destinazione: il corrispondente indirizzo bus del convertitore
L'immissione nel campo Nome: è libera.
⇒ Fare clic su Inserisci
Il dispositivo di azionamento selezionato viene visualizzato nella finestra di anteprima del
wizard di progetto.
Convertitori da incasso
136
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Figura 5-10
Apparecchio di azionamento inserito
⇒ Fare clic su Avanti >
Viene visualizzato un riepilogo del progetto.
Figura 5-11
Riepilogo
⇒ Fare clic su Fine per terminare la creazione di un nuovo progetto per il dispositivo di
azionamento.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
137
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
5.3.2
Configurazione di un apparecchio di azionamento
Nella navigazione di progetto aprire la struttura che contiene l'apparecchio di azionamento
desiderato.
Figura 5-12
Navigazione di progetto – Configurazione di un apparecchio di azionamento
⇒ Nella navigazione di progetto fare clic sul segno + (più) accanto all'apparecchio di
azionamento che si desidera configurare. Il segno + (più) si trasforma in segno - (meno) e le
opzioni per la configurazione dell'apparecchio di azionamento vengono visualizzate sotto
l'apparecchio di azionamento.
⇒ Fare doppio clic su Configura apparecchio di azionamento.
Convertitori da incasso
138
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Configurazione di un apparecchio di azionamento
Figura 5-13
Configurazione di un apparecchio di azionamento
⇒ In Tensione di allacciamento: selezionare la tensione corretta e in Tipo di raffreddamento:
il tipo di raffreddamento corretto per l'apparecchio di azionamento.
Nota
Effettuare una preselezione
Questa è un'impostazione preliminare degli apparecchi da incasso. La tensione di rete non
viene ancora impostata definitivamente.
⇒ Nell'elenco Selezione apparecchio di azionamento: selezionare il corrispondente
apparecchio di azionamento in base al tipo (numero di ordinazione; vedere la targhetta dei
dati tecnici).
⇒ Fare clic su Avanti >
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
139
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Selezione delle opzioni
Figura 5-14
Selezione delle opzioni
⇒ Nella casella combinata Selezione delle opzioni: selezionare le opzioni che fanno parte
dell'apparecchio di azionamento facendo clic sulla casella corrispondente.
ATTENZIONE
Danneggiamento del filtro sinusoidale per mancata attivazione durante la messa in servizio
La mancata attivazione del filtro sinusoidale durante la messa in servizio può provocare il
danneggiamento del filtro stesso.
• Attivare il filtro sinusoidale durante la messa in servizio selezionando la corrispondente
casella di controllo (opzione SIN).
Convertitori da incasso
140
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
ATTENZIONE
Danneggiamento del filtro du/dt per mancata attivazione durante la messa in servizio
La mancata attivazione del filtro du/dt durante la messa in servizio può provocare il
danneggiamento del filtro stesso.
• Attivare il filtro du/dt durante la messa in servizio selezionando la corrispondente casella
di controllo (opzione DU/DT).
Nota
Bobina motore
Una bobina motore presente (opzione CHK) deve essere necessariamente attivata quando
si seleziona l'opzione, altrimenti la regolazione del motore non può funzionare
correttamente.
Nota
Verifica delle opzioni selezionate
Confrontare attentamente le opzioni selezionate con quelle collegate al proprio apparecchio
da incasso.
In base alle opzioni selezionate, il wizard effettua delle interconnessioni interne, per cui non
è possibile annullare le opzioni selezionate mediante il pulsante < Indietro.
In caso di errore di immissione, è necessario eliminare l'intero apparecchio di azionamento
nella navigazione di progetto e inserirne uno nuovo!
⇒ Dopo avere attentamente verificato le opzioni, fare clic su Avanti >
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
141
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Selezione della struttura di regolazione
Figura 5-15
Selezione della struttura di regolazione
⇒ Selezionare le impostazioni corrispondenti per la struttura di regolazione:
● Moduli funzionali:
– Regolatore di tecnologia
– Segnalazioni/sorveglianze ampliate
● Regolazione:
– Regolazione n/M + controllo U/f, controllo I/f
– Controllo U/f
Convertitori da incasso
142
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
● Tipo di regolazione:
in base alla regolazione scelta sono disponibili per la selezione i seguenti tipi di
controllo/di regolazione:
– 0: Controllo U/f con caratteristica lineare
– 1: Controllo U/f con caratteristica lineare e FCC
– 2: Controllo U/f con caratteristica parabolica
– 3: Controllo U/f con caratteristica parametrizzabile
– 4: Controllo U/f con caratteristica lineare ed ECO
– 5: Controllo U/f per azionamenti con frequenza precisa (settore tessile)
– 6: Controllo U/f per azionamenti con frequenza precisa e FCC
– 7: Controllo U/f con caratteristica lineare ed ECO
– 15: Funzionamento con resistenza di frenatura
– 18: Controllo I/f con corrente fissa
– 19: Controllo U/f con valore di riferimento della tensione indipendente
– 20: Regolazione del numero di giri (senza encoder)
– 21: Regolazione del numero di giri (con encoder)
– 22: Regolazione della coppia (senza encoder)
– 23: Regolazione della coppia (con encoder)
⇒ Fare clic su Avanti >
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
143
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Configurazione delle proprietà dell'azionamento
Figura 5-16
Configurazione delle proprietà dell'azionamento
⇒ In Norma: selezionare la normativa corrispondente al motore utilizzato.
Viene definito quanto segue:
● Motore IEC (50 Hz, unità SI): frequenza di rete 50 Hz, dati del motore in kW
● Motore NEMA (60 Hz, unità SI): frequenza di rete 60 Hz, dati del motore in hp
⇒ In Tensione di allacciamento: selezionare la tensione di ingresso corretta per
l'apparecchio.
⇒ Fare clic su Avanti >
Il motore collegato può essere selezionato o immesso in vari modi:
● selezionando un motore standard da un elenco
● inserendo i dati motore.
Convertitori da incasso
144
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Selezionare il tipo di motore scegliendo un motore standard da un elenco
Figura 5-17
Configurazione del motore – Selezione del tipo di motore tramite selezione di un motore
standard dall'elenco
⇒ Nel campo Nome motore: immettere un nome qualsiasi per il motore.
⇒ Selezionare Seleziona motore standard dalla lista
⇒ Nella casella di riepilogo accanto a Tipo di motore: selezionare il tipo di motore
corrispondente
⇒ Dall'elenco Selezione motore: selezionare il motore corrispondente
⇒ Alla voce Collegamento in parallelo motore immettere all'occorrenza il numero dei motori
collegati in parallelo.
I motori collegati in parallelo devono essere dello stesso tipo e della stessa grandezza.
⇒ Fare clic su Avanti > per configurare il freno di stazionamento motore
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
145
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Selezione del tipo di motore tramite immissione dei dati motore
Figura 5-18
Configurazione del motore – Selezione del tipo di motore
⇒ Nel campo Nome motore: immettere un nome qualsiasi per il motore.
⇒ Selezionare Immetti dati motore
⇒ Nella casella di riepilogo accanto a Tipo di motore: selezionare il motore corrispondente
per la propria applicazione.
⇒ Alla voce Collegamento in parallelo motore immettere all'occorrenza il numero dei motori
collegati in parallelo.
I motori collegati in parallelo devono essere dello stesso tipo e della stessa grandezza.
Nota
Selezione del tipo di motore
La selezione del tipo di motore serve a preassegnare specifici parametri del motore e a
ottimizzare il funzionamento. I dettagli sono descritti nel Manuale delle liste al parametro
p0300.
Convertitori da incasso
146
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Nota
Messa in servizio di un motore asincrono
La descrizione dei passi seguenti si riferisce alla messa in servizio di un motore asincrono.
Per la messa in servizio di un motore sincrono ad eccitazione permanente valgono alcune
particolari condizioni marginali che vengono descritte in un capitolo a parte (vedere il
capitolo "Canale del valore di riferimento e regolazione / Motori sincroni ad eccitazione
permanente").
⇒ Fare clic su Avanti >
Configurazione del motore – Immissione dei dati del motore
Figura 5-19
Configurazione del motore – Immissione dei dati del motore
⇒ Immettere i dati del motore (vedere la targhetta del motore).
⇒ Attivare l'opzione Immetti dati motore opzionali se necessario.
⇒ Attivare l'opzione Immetti dati del circuito equivalente opzionali se necessario.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
147
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Nota
Immissione dei dati del circuito equivalente
L'opzione Immetti dati del circuito equivalente opzionali dovrebbe essere attivata solo se è
disponibile il foglio dati con i dati del circuito equivalente. Se nella finestra non vengono
immessi tutti i dati, il tentativo di caricare il progetto dell'azionamento nel sistema di
destinazione genererà dei messaggi d'errore.
⇒ Fare clic su Avanti >
Configurazione del motore – Immissione dei dati opzionali
Figura 5-20
Impostazione dati del motore opzionali
⇒ Immettere i dati del motore opzionali.
⇒ Fare clic su Avanti >
Convertitori da incasso
148
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Configurazione del motore – Immissione dei dati del circuito equivalente
Figura 5-21
Immissione dei dati del circuito equivalente
⇒ selezionare la rappresentazione dei dati del circuito equivalente:
● Sistema di unità fisico
La rappresentazione dei dati del circuito equivalente avviene in unità fisiche.
● Sistema di unità riferito
La rappresentazione dei dati del circuito equivalente avviene in %, con riferimento ai dati
nominali del motore.
⇒ Immettere completamente i dati del circuito equivalente.
⇒ Fare clic su Avanti >
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
149
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Calcolo dei dati del motore/regolatore
Figura 5-22
Calcolo dei dati del motore/regolatore
⇒ In Calcolo dei dati motore/regolatore selezionare le rispettive preimpostazioni per la
configurazione dell'apparecchio.
Nota
Impostazione manuale dei dati del circuito equivalente
Se si immettono manualmente i dati del circuito equivalente (vedere la figura "Immissione
dei dati del circuito equivalente"), il calcolo dei dati del motore e del regolatore dovrebbe
avvenire senza calcolo dei dati del circuito equivalente.
⇒ Fare clic su Avanti >
Convertitori da incasso
150
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Configurazione del freno di stazionamento motore
Figura 5-23
Configurazione del freno di stazionamento motore
⇒ In Configurazione freno di stazionamento: selezionare la rispettiva impostazione per la
configurazione dell'apparecchio:
● 0: Nessun freno di stazionamento del motore presente
● 1: freno di stazionamento motore come comando sequenziale
● 2: freno di stazionamento motore sempre aperto
● 3: freno di stazionamento motore come controllo sequenziale, collegamento tramite BICO
⇒ Selezionando un freno di stazionamento motore si può anche attivare il modulo funzionale
"Comando freni esteso".
⇒ Fare clic su Avanti >
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
151
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Immissione dei dati dell'encoder (opzione modulo encoder SMC30)
Nota
Immissione dei dati dell'encoder
Se è stata specificato il modulo encoder SMC30 durante la selezione delle opzioni, viene
visualizzata la maschera seguente per l'immissione dei dati dell'encoder.
Figura 5-24
Immissione dei dati dell'encoder
⇒ Nel campo Nome encoder: un nome qualsiasi.
Nota
Stato di fornitura:
Nello stato di fornitura un encoder HTL viene configurato in modo bipolare con 1024 impulsi
per giro sulla morsettiera X521/X531 del modulo encoder SMC30.
Convertitori da incasso
152
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
⇒ Per selezionare un'altra configurazione dell'encoder predefinita, fare clic sul pulsante di
opzione Seleziona encoder standard dall'elenco e selezionare uno degli encoder proposti
nell'elenco.
⇒ Per immettere una configurazione speciale dell'encoder, fare clic sul pulsante di opzione
Immettere dati e quindi sul pulsante Dati encoder. Viene visualizzata la seguente finestra per
l'immissione dei relativi dati.
Figura 5-25
Immissione dei dati dell'encoder – Dati dell'encoder definiti dall'utente
⇒ Selezionare il Sistema di misura
In combinazione con SINAMICS G130 si possono scegliere i seguenti encoder:
● HTL
● TTL
⇒ Immettere i valori corrispondenti dell'encoder.
⇒ Nella scheda Dettagli si possono impostare particolari proprietà dell'encoder, come la
risoluzione fine, l'inversione, l'inseguimento di posizione del riduttore di misura.
⇒ Quindi fare clic su OK.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
153
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
ATTENZIONE
Danni materiali a causa dell'errata selezione della tensione di alimentazione per l'encoder
Dopo la messa in servizio dell'encoder viene attivata la tensione di alimentazione (5/24 V)
impostata per l'encoder sull'unità modulare SMC30. Se viene collegato un encoder a 5 V e
la tensione di alimentazione non è impostata correttamente, l'encoder rischia di essere
danneggiato.
• Impostare correttamente la tensione di alimentazione per l'encoder collegato.
Preimpostazioni valori di riferimento / sorgenti di comando
Figura 5-26
Preimpostazione valori di riferimento / sorgenti di comando
⇒ In Sorgenti dei comandi: selezionare e Sorgenti valori di riferimento: le rispettive
preimpostazioni per la configurazione dell'apparecchio.
Convertitori da incasso
154
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Sono disponibili le seguenti selezioni come sorgenti di comando e di riferimento:
Sorgenti dei comandi:
PROFIdrive (impostazione predefinita)
Morsetti TM31
Morsetti CU
PROFIdrive + TM31
Sorgenti valori di riferimento:
PROFIdrive (impostazione predefinita)
Morsetti TM31
Potenziometro motore
Valore di riferimento fisso
Nota
Uso di CDS0
In SINAMICS G130 si utilizza per default solo CDS0 per la preimpostazione delle sorgenti di
comando e di riferimento.
Controllare che la preimpostazione selezionata corrisponda alla configurazione effettiva del
sistema
Nota
Uso dell'opzione Nessuna selezione
Per la preimpostazione della sorgente di comando e del valore di riferimento è disponibile
anche l'opzione "nessuna selezione", con cui non viene effettuata alcuna preimpostazione
della sorgente di comando e del valore di riferimento.
⇒ Dopo avere attentamente verificato le preimpostazioni selezionate, fare clic su Avanti >
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
155
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Selezione delle funzioni di azionamento
Figura 5-27
Selezione delle funzioni di azionamento
Convertitori da incasso
156
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
⇒ Selezionare i dati corrispondenti:
● Applicazione tecnologica:
– "(0) Azionamento standard (VECTOR)"
La modulazione del fronte non è abilitata.
La riserva di tensione dinamica viene aumentata (10 V), riducendo così la tensione di
uscita massima.
– "(1) Pompe e ventilatori" (preimpostazione)
La modulazione del fronte è abilitata.
La riserva di tensione dinamica viene ridotta (2 V), aumentando così la tensione di
uscita massima.
– "(2) Regolazione senza encoder fino a f = 0 (carichi passivi)"
In caso di carichi passivi il funzionamento regolato è possibile fino all'arresto.
Vi rientrano applicazioni in cui il carico non genera una coppia generatorica in
partenza e il motore stesso si arresta in caso di blocco impulsi.
– "(4) Dinamica nel campo di deflussaggio"
La modulazione vettoriale nello spazio con sovracomando è abilitata.
La riserva di tensione dinamica viene aumentata (30 V), riducendo così la tensione di
uscita massima.
● Identificazione motore:
– (0): Bloccato
– (1): Identificazione dei dati motore e ottimizzazione della regolazione del numero di
giri
– (2): Identificazione dati motore (da fermo)
– (3): Ottimizzazione regolazione numero di giri (in funz. rotante)
Nota
Identificazione dati motore da fermo
In molti casi l'impostazione corretta per SINAMICS G130 è "Identificazione dati motore (da
fermo)".
In caso di regolazione della velocità con encoder si consiglia di selezionare "Identificazione
dati motore e ottimizz. regolaz. numero di giri"; in genere questa misura avviene con la
macchina non accoppiata.
AVVERTENZA
Pericolo di vita dovuto al movimento imprevisto del motore durante l'identificazione dati
motore con motore funzionante
Se si seleziona l'identificazione dei dati motore con ottimizzazione a motore funzionante,
dopo la messa in servizio l'azionamento provoca movimenti del motore che raggiungono il
numero di giri massimo.
• Rispettare le avvertenze di sicurezza generali.
• Accertarsi che le funzioni di OFF di emergenza siano operative al momento della messa
in servizio.
⇒ Fare clic su Avanti >
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
157
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Selezione dello scambio dati di processo
Figura 5-28
Selezione dello scambio dati di processo
⇒ Selezionare il tipo di telegramma PROFIdrive.
Tipi di telegramma
● 1: Telegramma standard 1, PZD 2/2
● 2: Telegramma standard 2, PZD 4/4
● 3: Telegramma standard 3, PZD 5/9
● 4: Telegramma standard 4, PZD 6/14
● 20: Telegramma SIEMENS 20, PZD 2/6
● 220: Telegramma SIEMENS 220, PZD 10/10
● 352: Telegramma SIEMENS 352, PZD 6/6
● 999: Progettazione libera dei telegrammi con BICO (preimpostazione)
⇒ Fare clic su Avanti >
Convertitori da incasso
158
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Immissione dei parametri importanti
Figura 5-29
Parametri importanti
⇒ Immettere i valori corrispondenti dei vari parametri.
Nota
Tooltip
STARTER propone delle descrizioni dei comandi se si posiziona il puntatore del mouse sul
campo desiderato senza farvi clic sopra.
⇒ Fare clic su Avanti >
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
159
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Server web
Figura 5-30
Server web
⇒ Configurare il server web.
Il server web è attivato nell'impostazione di fabbrica.
Attivare o disattivare il server web tramite Attivare il server web.
Se necessario selezionare Consentire solo l'accesso tramite collegamento sicuro (https).
⇒ Fare clic su Avanti >
Convertitori da incasso
160
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Riepilogo dei dati dell'apparecchio di azionamento
Figura 5-31
Riepilogo dei dati dell'apparecchio di azionamento
⇒ Con Copia testo negli Appunti si può inserire il riepilogo visualizzato dei dati
dell'azionamento in un programma di elaborazione testi per poterlo ulteriormente utilizzare.
⇒ Fare clic su Fine.
⇒ Salvare il progetto sul disco rigido tramite Progetto > Salva.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
161
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
5.3.3
Trasferimento del progetto di azionamento
Si è creato un progetto e lo si è salvato sul disco rigido. L'operazione successiva consiste
nel copiare i dati di configurazione del progetto nel dispositivo di azionamento.
Definizione del punto di accesso online
Per collegare il sistema di destinazione occorre definire il punto di accesso selezionato.
Selezionare nella barra dei menu Sistema di destinazione > Seleziona apparecchi di
destinazione...; viene visualizzata la finestra di dialogo seguente:
Figura 5-32
Selezione dell'apparecchio di destinazione e definizione dei punti di accesso
Nella finestra di dialogo vengono elencati tutti gli apparecchi che fanno parte del progetto.
Convertitori da incasso
162
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Definizione del punto di accesso:
● Attivare l'accesso S7ONLINE per un apparecchio quando è stabilito il collegamento con il
PG/PC via PROFINET o PROFIBUS.
● Attivare l'accesso DEVICE per un apparecchio quando è stabilito il collegamento con il
PG/PC via interfaccia Ethernet.
Trasferimento del progetto STARTER nel dispositivo di azionamento
La procedura seguente consente di copiare il progetto STARTER creato offline nel
dispositivo di azionamento:
Passo
Selezione nella
barra degli
strumenti
1
Selezionare la voce di menu
Progetto > Collega agli apparecchi di destinazione selezionati
2
Selezionare la voce di menu
Sistema di destinazione > Carica > Carica progetto nel sistema di
destinazione
Nota
Salvataggio dei dati del progetto in modo protetto dalle interruzioni di rete
I dati di progetto sono stati trasferiti nel dispositivo di azionamento. Questi dati sono presenti
momentaneamente solo nella memoria volatile dell'apparecchio di azionamento, ma non
sono salvati sulla scheda di memoria!
Per salvare i dati di progetto in modo sicuro sulla scheda di memoria dell'apparecchio di
azionamento, eseguire il passo operativo seguente.
Passo
3
Selezione nella
barra degli
strumenti
Selezionare la voce di menu Sistema di destinazione > Copia da RAM a ROM
Nota
Copia da RAM a ROM
Il simbolo Copia da RAM a ROM può essere selezionato solo se l'apparecchio di
azionamento è selezionato nella navigazione di progetto.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
163
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Risultati della procedura descritta
● È stato creato un progetto per il dispositivo di azionamento offline con STARTER.
● I dati di progetto sono stati salvati sul disco rigido del PC.
● I dati di progetto sono stati trasferiti nel dispositivo di azionamento
● I dati di progetto sono memorizzati in modo permanente sulla scheda di memoria del
dispositivo di azionamento
Nota
Suggerimento per l'uso di STARTER
STARTER è un tool di messa in servizio che facilita in ogni momento gli interventi complessi
sul sistema di azionamento.
Se in modalità online il sistema entra in uno stato non più controllabile, si consiglia di
cancellare il progetto nella navigazione di progetto e di crearne uno nuovo con STARTER
utilizzando i relativi dati di configurazione.
Convertitori da incasso
164
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
5.3.4
Messa in servizio con STARTER via Ethernet
Descrizione
La Control Unit si può mettere in servizio con un dispositivo di programmazione (PG/PC)
tramite l'interfaccia Ethernet integrata. Questa interfaccia è prevista solo per la messa in
servizio, non per comandare l'azionamento durante il funzionamento normale.
Non è possibile un routing dell'interfaccia Ethernet integrata tramite una scheda di
espansione CBE20 eventualmente inserita.
Presupposti
● STARTER a partire della versione 4.1.5 o successiva
● Control Unit CU320-2 DP dalla versione apparecchio "C", Control Unit CU320-2 PN
STARTER via Ethernet (esempio)
Figura 5-33
STARTER via Ethernet (esempio)
Procedura di attivazione del funzionamento online tramite Ethernet
1. Installare l'interfaccia Ethernet sul PG/PC seguendo le istruzioni del costruttore
2. Impostare l'indirizzo IP dell'interfaccia Ethernet in Windows.
– Assegnare al PG/PC un indirizzo IP libero (ad es. 169.254.11.1).
– L'impostazione di fabbrica dell'interfaccia Ethernet interna -X127 della Control Unit è
169.254.11.22.
3. Impostare il punto di accesso del tool di messa in servizio STARTER.
4. Assegnare un nome all'interfaccia della Control Unit con il tool di messa in servizio
STARTER.
Affinché STARTER possa stabilire la comunicazione, è necessario "inizializzare"
l'interfaccia Ethernet. Selezionare il funzionamento online in STARTER.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
165
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Impostazione dell'indirizzo IP in Windows 7
Nota
La procedura seguente si riferisce al sistema operativo Windows 7. Negli altri sistemi
operativi (ad es. Windows XP) i comandi possono variare leggermente.
1. Nel dispositivo di programmazione (PG/PC) aprire il Pannello di controllo selezionando
"Start > Pannello di controllo".
2. Nel Pannello di controllo del proprio dispositivo di programmazione selezionare la
funzione "Centro di rete e abilitazione" in "Rete e Internet".
3. Nella scheda di rete visualizzata fare clic sul link del collegamento.
4. Nella finestra di dialogo dello stato del collegamento selezionare "Proprietà" e rispondere
"Sì" alla richiesta di conferma.
5. Nella finestra di dialogo delle proprietà del collegamento selezionare l'elemento
"Protocollo Internet 4 (TCP/IPv4)", quindi fare clic su "Proprietà".
6. Nella finestra di dialogo delle proprietà attivare l'opzione "Utilizza il seguente indirizzo IP".
7. Impostare l'indirizzo IP dell'interfaccia di accesso del PG/PC alla Control Unit su
169.254.11.1 e la subnet mask su 255.255.0.0.
Convertitori da incasso
166
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Figura 5-34
Proprietà di Internet Protocol (TCP/IP)
8. Fare clic su "OK" e chiudere la finestra specifica di Windows delle connessioni di rete.
Assegnazione dell'indirizzo IP e del nome tramite STARTER, funzione "Nodi raggiungibili"
Con STARTER vengono assegnati all'interfaccia Ethernet un indirizzo IP e un nome.
1. Collegare PG/PC e Control Unit con un cavo Ethernet.
2. Accendere la Control Unit.
3. Aprire STARTER.
4. Creare un nuovo progetto o aprirne uno esistente.
5. Cercare i nodi disponibili su Ethernet selezionando Progetto -> Nodi/partner raggiungibili
o premendo il pulsante "Nodi/partner raggiungibili".
6. L'oggetto di azionamento SINAMICS viene riconosciuto e visualizzato come nodo di bus
con indirizzo IP 169.254.11.22 e senza nome.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
167
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Figura 5-35
Nodi/partner raggiungibili
7. Selezionare la voce corrispondente al componente di bus e con il pulsante destro del
mouse selezionare la voce di menu visualizzata "Elaborazione utenti Ethernet".
8. Nella maschera "Modifica nodo/partner Ethernet" inserire il nome del dispositivo per
l'interfaccia Ethernet (ad es. "drive1") e fare clic sul pulsante "Assegna nome". Nella
configurazione IP inserire l'indirizzo IP (ad es. 169.254.11.10) e specificare la maschera
di sottorete (ad es. 255.255.255.0). Quindi fare clic sul pulsante "Assegna configurazione
IP" e chiudere la finestra di dialogo.
Convertitori da incasso
168
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.3 Sequenza di messa in servizio con STARTER
Nota
Assegnazioni dei nomi ai dispositivi
Per l'assegnazione del nome dei dispositivi IO su Ethernet (componenti di SINAMICS) sui
devono rispettare le convenzioni ST (Structured Text). I nomi devono essere univoci
nell'ambito della rete Ethernet.
Regole per l'assegnazione dei nomi:
• Nel nome di un IO-Device non sono ammessi caratteri speciali ad eccezione di "-" e
"." (ad es. non sono ammessi dieresi, caratteri vuoti, parentesi ecc.).
• Il nome dell'apparecchio non deve iniziare né terminare con il carattere "-".
• Il nome dell'apparecchio non deve iniziare con cifre.
• Limitazione a 240 caratteri totali (lettere minuscole, cifre, trattino o punto).
• Un componente costitutivo interno al nome dell'apparecchio, ossia una catena di
caratteri tra 2 punti, può avere al massimo 63 caratteri.
• Il nome dell'apparecchio non deve avere il formato n.n.n.n (n = 0, ... 999).
• Il nome dell'apparecchio non può iniziare con la sequenza di caratteri "port-xyz" o
"port-xyz-abcde" (a, b, c, d, e, x, y, z = 0, ... 9).
Figura 5-36
Modifica dei nodi Ethernet
9. Premendo il pulsante "Aggiorna (F5)" l'indirizzo IP e il nome vengono visualizzati in
corrispondenza della voce del componente del bus. In caso contrario, chiudere la
maschera "Nodi/partner raggiungibili" e ripetere la ricerca dei nodi accessibili.
10.Se l'interfaccia Ethernet viene visualizzata come componente di bus, selezionare la voce
e fare clic sul pulsante "Applica".
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
169
Messa in servizio
5.4 Pannello operativo AOP30
11.L'azionamento SINAMICS viene visualizzato come oggetto di azionamento nella struttura
gerarchica del progetto.
12.A questo punto è possibile configurare il dispositivo di azionamento; vedere il capitolo
"Configurazione di un dispositivo di azionamento".
Nota
Percorso di memorizzazione dell'indirizzo IP
L'indirizzo IP e il nome dell'apparecchio vengono salvati in modo non volatile nella scheda di
memoria della Control Unit.
Parametri
Le caratteristiche dell'interfaccia Ethernet possono anche essere modificate o visualizzate
mediante parametri.
• p8900
IE Name of Station
• p8901
IE IP Address of Station
• p8902
IE Default Gateway of Station
• p8903
IE Subnet Mask of Station
• p8904
IE DHCP Mode
• p8905
IE Configurazione interfacce
• r8910
IE Name of Station active
• r8911
IE IP Address of Station active
• r8912
IE Default Gateway of Station active
• r8913
IE Subnet Mask of Station active
• r8914
IE DHCP Mode of Station active
• r8915
IE MAC Address of Station
Convertitori da incasso
170
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.4 Pannello operativo AOP30
5.4
Pannello operativo AOP30
Descrizione
Per il servizio e la supervisione, nonché per la messa in servizio, è disponibile un pannello
operatore opzionale con le caratteristiche seguenti:
● Display LCD grafico con retroilluminazione per la visualizzazione di testi in chiaro e
"diagrammi a barre" di variabili di processo
● LED per la visualizzazione degli stati operativi
● Funzione di help con descrizione delle cause e dei rimedi per anomalie ed avvisi
● Blocco di tasti per la gestione di un azionamento
● Commutazione LOCAL/REMOTE per la selezione della postazione operativa (priorità di
comando da pannello operatore o da morsettiera/PROFIdrive)
● Tastiera decimale per l'introduzione di valori numerici per il riferimento o per i valori dei
parametri
● Tasti funzionali per la navigazione guidata nel menu di sistema
● Sistema di sicurezza a due livelli contro la modifica involontaria o non autorizzata delle
impostazioni
● Grado di protezione IP54 (una volta installato)
Figura 5-37
Componenti del pannello operatore dell'apparecchio da incasso (AOP30)
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
171
Messa in servizio
5.5 Prima messa in servizio con l'AOP30
5.5
Prima messa in servizio con l'AOP30
5.5.1
Primo avviamento
Finestra iniziale
Dopo la prima inserzione inizia automaticamente l'inizializzazione della Control Unit. Viene
visualizzata la seguente schermata:
Figura 5-38
Schermata iniziale
Durante l'avviamento del sistema, le descrizioni dei parametri vengono caricati dalla scheda
CompactFlash nel pannello operatore.
Figura 5-39
Caricamento delle descrizioni dei parametri durante l'avviamento del sistema
Convertitori da incasso
172
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.5 Prima messa in servizio con l'AOP30
Scelta lingua
Quando si avvia il sistema per la prima volta, viene visualizzata una finestra per la selezione
della lingua.
Nella finestra di dialogo occorre selezionare la
lingua.
Modifica della lingua con <F2> e <F3>
Selezione della lingua con <F5>
Una volta selezionata la lingua, l'avviamento del sistema prosegue.
Al termine dell'avviamento, alla prima inserzione dopo la fornitura occorre eseguire una
messa in servizio dell'azionamento. Successivamente è possibile inserire il convertitore.
Per i successivi avviamenti si può passare direttamente al normale funzionamento.
Navigazione all'interno delle finestre di dialogo
All'interno di una finestra di dialogo si possono generalmente selezionare i vari campi o
caselle di riepilogo con i tasti <F2> o <F3>. Le caselle di riepilogo sono generalmente dei
testi inquadrati che, se selezionati, vengono evidenziati con colori invertiti (scritta bianca su
sfondo nero).
Il valore effettivo di una casella di riepilogo selezionata può essere confermato con <F5>
"OK" oppure cambiato con "Modifica"; viene visualizzata allora un'altra finestra di
immissione, nella quale è possibile immettere direttamente il valore desiderato tramite il
tastierino numerico oppure selezionare il valore da un elenco.
Per passare da una finestra di dialogo ad una finestra precedente o successiva, selezionare
"Avanti" o "Indietro" quindi confermare con <F5> "OK".
Nelle maschere con parametri particolarmente importanti, il pulsante "Avanti" viene
visualizzato solo sull'estremità inferiore della finestra di dialogo. È infatti necessario verificare
e correggere ogni singolo parametro di questa finestra di dialogo prima di poter passare alla
finestra di dialogo successiva.
In alcune fasi della messa in servizio è possibile interrompere l'intero processo di messa in
servizio selezionando "Interrompi MIS".
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
173
Messa in servizio
5.5 Prima messa in servizio con l'AOP30
5.5.2
Messa in servizio di base
Rilevamento dei dati del motore
Durante la messa in servizio di base i dati del motore devono essere immessi tramite il
pannello operatore. Essi possono essere ricavati dalla targhetta del motore.
Figura 5-40
Tabella 5- 1
Esempio di targhetta identificativa del motore
Dati del motore
Unità di sistema per frequenza di rete e introduzione dati del
motore
N. di parametro
Valori
Unità
p0100
0
1
IEC [50 Hz / kW]
NEMA [60 Hz / hp]
Motore:
Tensione nominale
Corrente nominale
Potenza nominale
Fattore di potenza nominale cos ϕ (solo con p0100 = 0)
Rendimento nominale η (solo con p0100 = 1)
Frequenza nominale
Numero di giri nominale
p0304
p0305
p0307
p0308
p0309
p0310
p0311
[V]
[A]
[kW] / [hp]
[%]
[Hz]
[min-1] / [rpm]
Convertitori da incasso
174
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.5 Prima messa in servizio con l'AOP30
Messa in servizio di base: Selezione del tipo di motore e impostazione dei dati del motore
Nella finestra di dialogo occorre scegliere la
norma motore e il tipo di motore.
Per la norma motore viene definito quanto
segue:
0: frequenza di rete 50 Hz, dati del motore in
kW
1: frequenza di rete 60 Hz, dati del motore in
hp
Con Tipo di motore si seleziona il motore
desiderato.
Navigazione tra le caselle di riepilogo con
<F2> e <F3>
Attivazione della selezione effettuata nella
navigazione con <F5>
Immissione dei dati del motore secondo la
targhetta dei dati tecnici.
Navigazione tra le caselle di riepilogo con
<F2> e <F3>
Attivazione della selezione effettuata nella
navigazione con <F5>
Per modificare il valore di un parametro,
posizionarsi sulla casella di riepilogo
selezionata e selezionare <F5>.
Viene visualizzata una finestra di immissione
nella quale
• è possibile immettere il valore desiderato
oppure
• selezionare il valore da un elenco.
L'immissione dei dati del motore termina
quando si seleziona la casella "Avanti"
situata sotto l'ultimo valore del parametro e
si attiva con <F5>.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
175
Messa in servizio
5.5 Prima messa in servizio con l'AOP30
Nota
Selezione del tipo di motore
La scelta del tipo di motore serve a preassegnare specifici parametri del motore e a
ottimizzare il funzionamento. I dettagli sono descritti nel Manuale delle liste al parametro
p0300.
Nota
Selezione di un motore elencato (p0300 ≥ 100)
Quando si seleziona un tipo di motore ≥ 100 è possibile scegliere da una lista di selezione il
relativo numero di ordinazione.
Nota
Messa in servizio di un motore asincrono
La descrizione dei passi seguenti si riferisce alla messa in servizio di un motore asincrono.
Per la messa in servizio di un motore sincrono ad eccitazione permanente (p0300 = 2)
valgono alcune particolari condizioni marginali che vengono descritte in un capitolo a parte
(vedere il capitolo "Canale del valore di riferimento e regolazione / Motori sincroni ad
eccitazione permanente").
Messa in servizio di base: Immissione dei dati dell'encoder (se presente)
Quando è collegata l'unità SMC30 per
l'analisi dell'encoder, questa unità viene
riconosciuta dall'AOP30 e compare una
pagina per l'immissione dei dati dell'encoder.
Navigazione tra le caselle di riepilogo con
<F2> e <F3>
Attivazione della selezione effettuata nella
navigazione con <F5>
Convertitori da incasso
176
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.5 Prima messa in servizio con l'AOP30
Selezionando il parametro p0400 (selezione tipo di encoder) si possono facilmente
impostare degli encoder predefiniti:
3001:
1024 HTL A/B R su X521/X531
3002:
1024 TTL A/B R su X521/X531
3003:
2048 HTL A/B R su X521/X531
3005:
1024 HTL A/B su X521/X531
3006:
1024 HTL A/B su X521/X531
3007:
2048 HTL A/B su X521/X531
3008:
2048 HTL A/B su X521/X531
3009:
1024 HTL A/B unipolare su X521/X531
3011:
2048 HTL A/B unipolare su X521/X531
3020:
2048 TTL A/B R con Sense su X520
Nota
Stato di fornitura:
Nello stato di fornitura un encoder HTL bipolare viene impostato con 1024 impulsi per giro e
tensione di alimentazione di 24 V.
Nella sezione "Installazione elettrica" vengono illustrati due esempi di collegamento per
encoder HTL e TTL.
Nota
Tipo di encoder predefinito
Se è stato selezionato con p0400 un tipo di encoder predefinito, le impostazioni dei
successivi parametri p0404, p0405 e p0408 non si possono modificare.
Se l'encoder collegato non dovesse corrispondere esattamente a uno preimpostato in
p0400, è possibile semplificare l'immissione dei dati dell'encoder procedendo nel modo
seguente:
• Selezionare tramite p0400 un tipo di encoder, i cui dati siano simili a quelli dell'encoder
collegato.
• Selezionare "Encoder definito dall'utente" (p0400 = 9999); in questo modo vengono
mantenuti i valori impostati in precedenza.
• Adattare i campi dei bit di p0404, p0405 e p0408 ai dati dell'encoder collegato.
Tabella 5- 2
Significato delle impostazioni dei bit per p0404
Bit
Significato
Valore 0
Valore 1
20
Tensione 5 V
No
Sì
21
Tensione 24 V
No
Sì
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
177
Messa in servizio
5.5 Prima messa in servizio con l'AOP30
Tabella 5- 3
Significato delle impostazioni dei bit per p0405
Bit
Significato
Valore 0
Valore 1
0
Segnale
Unipolare
Bipolare
1
Livello
HTL
TTL
2
Sorveglianza traccia
Nessuna
A/B>< -A/B
3
Impulso zero
24 V unipolare
Come traccia A/B
4
Soglia di commutazione
Low
High
5
Impulso/direzione
No
Sì
ATTENZIONE
Danni materiali a causa dell'errata selezione della tensione di alimentazione per l'encoder
Dopo la messa in servizio dell'encoder viene attivata la tensione di alimentazione (5/24 V)
impostata per l'encoder sull'unità modulare SMC30. Se è stato collegato un encoder a 5 V
e la tensione di alimentazione non è impostata correttamente (bit 20 = "sì", bit 21 = "no"),
l'encoder rischia di essere danneggiato.
• Impostare correttamente la tensione di alimentazione per l'encoder collegato.
Convertitori da incasso
178
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.5 Prima messa in servizio con l'AOP30
Messa in servizio di base: Immissione dei parametri di base
Impostazione dei parametri della messa in
servizio di base:
Se è collegato un filtro sinusoidale, questo
deve essere obbligatoriamente attivato in
p0230 (p0230 = 3 o 4), altrimenti può essere
danneggiato!
p0700: Preassegnazione sorgente di
comando
1: PROFIdrive
2: Morsetti TM31
3: Morsetti CU
4: PROFIdrive+TM31
p1000: Preassegnazione sorgente di
comando
1: PROFIdrive
2: Morsetti TM31
3: Potenziometro motore
4: Valore di riferimento fisso
Dopo la selezione di una sorgente del valore
di riferimento (p1000), il valore di riferimento
principale p1070 viene impostato di
conseguenza.
Navigazione tra le caselle di riepilogo con
<F2> e <F3>
Attivazione della selezione effettuata nella
navigazione con <F5>
Per modificare il valore di un parametro,
posizionarsi sulla casella di riepilogo
selezionata e selezionare <F5>.
Viene visualizzata un'altra finestra di
immissione nella quale è possibile
- immettere direttamente il valore desiderato
oppure
- selezionare il valore da un elenco.
Conferma finale
Segue una conferma finale per l'applicazione
dei parametri di base immessi.
Dopo la selezione di "Avanti" e l'attivazione
con <F5>, i parametri di base vengono
memorizzati in modo permanente e vengono
eseguiti i calcoli necessari per la regolazione.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
179
Messa in servizio
5.5 Prima messa in servizio con l'AOP30
Nota
Impostazione del filtro lato motore
Deve essere immesso un filtro disponibile sul lato motore in p0230:
• Bobina motore: p0230 = 1
• Filtro du/dt compatto con Voltage Peak Limiter: p0230 = 2
• Filtro du/dt con Voltage Peak Limiter: p0230 = 2
• Filtro sinusoidale Siemens: p0230 = 3.
Con p0230 = 4 "Filtro sinusoidale di terze parti" è possibile registrare un proprio filtro
sinusoidale; viene quindi visualizzata una finestra di immissione per i dati di filtro specifici.
ATTENZIONE
Danneggiamento del filtro sinusoidale per mancata attivazione durante la messa in servizio
La mancata attivazione del filtro sinusoidale durante la messa in servizio può provocare il
danneggiamento del filtro stesso.
• Attivare il filtro sinusoidale durante la messa in servizio.
ATTENZIONE
Danneggiamento del filtro du/dt per mancata attivazione durante la messa in servizio
La mancata attivazione del filtro du/dt durante la messa in servizio può provocare il
danneggiamento del filtro stesso.
• Attivare il filtro du/dt durante la messa in servizio.
Nota
Bobina motore
Una bobina motore presente deve essere necessariamente attivata quando si seleziona
l'opzione, altrimenti la regolazione del motore non può funzionare correttamente.
Nota
Uso dell'opzione Nessuna selezione
Per la preimpostazione della sorgente di comando e del valore di riferimento è disponibile
anche l'opzione "nessuna selezione", con cui non viene effettuata alcuna preimpostazione
della sorgente di comando e del valore di riferimento.
Convertitori da incasso
180
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.5 Prima messa in servizio con l'AOP30
Messa in servizio di base: Identificazione motore
Selezione dell'identificazione motore
Navigazione tra le caselle di riepilogo con
<F2> e <F3>
Attivazione della selezione effettuata nella
navigazione con <F5>
La misura a motore fermo aumenta la
precisione di regolazione dato che vengono
ridotti al minimo gli scostamenti dei valori
elettrici caratteristici dovuti a dispersioni
delle proprietà dei materiali e a tolleranze di
lavorazione.
La misura rotante rileva i dati necessari (ad
es. il momento di inerzia) per l'impostazione
del regolatore di velocità. Inoltre vengono
misurate la curva caratteristica di
magnetizzazione e la corrente nominale di
magnetizzazione del motore.
Modificare il numero di fasi da identificare:
• Nell'identificazione con una sola fase il
tempo richiesto dalla misura si riduce
drasticamente.
• Nell'identificazione con più fasi i risultati
della misura sono rappresentati da una
media.
L'inserzione avviene premendo il tasto
LOCAL (attendere finché non si accende il
LED del tasto LOCAL) e quindi il tasto ON.
Se non viene eseguita alcuna identificazione
del motore, la regolazione del motore non
funziona con i valori misurati, bensì con i
valori caratteristici calcolati a partire dai dati
della targhetta.
Nota
Conclusione dell'identificazione motore
Una volta terminata l'identificazione del motore, occorre premere il tasto OFF per rimuovere
il blocco inserzione
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
181
Messa in servizio
5.5 Prima messa in servizio con l'AOP30
AVVERTENZA
Pericolo di vita dovuto al movimento imprevisto del motore durante l'identificazione dati
motore con motore funzionante
Se si seleziona l'identificazione dei dati motore con ottimizzazione a motore funzionante,
dopo la messa in servizio l'azionamento provoca movimenti del motore che raggiungono il
numero di giri massimo.
• Rispettare le avvertenze di sicurezza generali.
• Accertarsi che le funzioni di OFF di emergenza siano operative al momento della messa
in servizio.
Nota
Assegnare l'abilitazione
Controllare che vi siano le abilitazioni richieste, perché altrimenti non sarà possibile
effettuare l'identificazione del motore.
Nota
Anomalia con misura da fermo o in rotazione
Se si verifica un errore durante la selezione della misura a motore fermo o della misura
rotante, non può essere eseguita l'identificazione del motore.
Per eliminare l'anomalia, occorre chiudere la finestra con "Nessuna identificazione" ed
eliminare l'anomalia.
Per selezionare nuovamente l'identificazione del motore, selezionare <MENU> - <Messa in
servizio/Service> - <Messa in servizio dell'azionamento> - <Identificazione motore>.
Convertitori da incasso
182
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.6 Condizione dopo la messa in servizio
5.6
Condizione dopo la messa in servizio
Modo LOCAL (comando tramite pannello operatore)
● La commutazione nel modo LOCAL avviene premendo il tasto "LOCAL/REMOTE".
● Il comando (ON/OFF) avviene con i tasti "ON" e "OFF".
● La preimpostazione del valore di riferimento avviene con i tasti "Incremento" e
"Decremento" oppure come introduzione alfanumerica con la tastiera numerica.
Uscite analogiche (esecuzione con TM31)
● Dall'uscita analogica 0 (X522:1,2) viene emesso il numero di giri reale (r0063) come
uscita in tensione nel campo 0 … 10 V.
Una tensione di 10 V corrisponde al numero di giri massimo impostato in p1082.
● Dall'uscita analogica 1 (X522:4,5) viene emesso il valore attuale di corrente (r0068) come
uscita di tensione nel campo 0 ... 10 V.
Una tensione di 10 V corrisponde al limite di corrente (p0640) impostato a 1,5 volte la
corrente nominale del motore (p0305).
Uscite digitali (esecuzione con TM31)
● Dall'uscita digitale 0 (X542:2,3) viene emesso il segnale "Impulsi abilitati".
● Dall'uscita digitale 1 (X542:5,6) viene emesso il segnale "Nessuna anomalia presente"
(motivo: sicurezza contro la rottura del conduttore).
● Dall'uscita digitale 8 (X541:2) viene emesso il segnale "Pronto all'inserzione".
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
183
Messa in servizio
5.7 Messa in servizio di un encoder con fattore di riduzione
5.7
Messa in servizio di un encoder con fattore di riduzione
Descrizione
La parametrizzazione di un riduttore deve essere effettuata nella messa in servizio
dell'encoder (p0010 = 4) mediante il parametro p0432 (numeratore), p0433 (denominatore) e
p0410 (segno).
Per definire in modo univoco la posizione di commutazione a partire dall'angolo dell'encoder
è importante la seguente condizione:
• Per resolver:
zp = numero di poli
• Per tutti gli altri encoder
assoluti:
zp = numero di poli
• dove n è il rapporto di
riduzione:
La messa in servizio dell'encoder verifica il rispetto di questa condizione di univocità e, se
necessario, impedisce di uscire dalla messa in servizio oppure genera un messaggio
d'errore.
Il bit del segno p0410 inverte sia l'angolo encoder fornito sia il numero di giri, e in questo
modo produce un fattore di riduzione negativo.
5.8
Ripristino dei parametri all'impostazione di fabbrica
L'impostazione di fabbrica è la condizione originale dell'apparecchio definita al momento
della spedizione.
Con un ripristino dei parametri all'impostazione di fabbrica è possibile annullare tutte le
modifiche dei parametri eseguite dopo la fornitura.
Ripristino dei parametri tramite AOP30
Impostare il filtro parametri su "Reset parametri"
<MENU> <Messa in servizio/Service> <OK> <Messa in servizio
dell'apparecchio> <OK> <30: Reset parametri> <OK>
Ripristino di tutti i parametri alle impostazioni di fabbrica
Tutti i parametri dell'apparecchio vengono ripristinati alle
impostazioni di fabbrica.
Convertitori da incasso
184
Istruzioni operative, 04/2014, A5E00386872A
Messa in servizio
5.8 Ripristino dei parametri all'impostazione di fabbrica
Ripristino dei parametri tramite STARTER
Il ripristino dei parametri in STARTER avviene in modalità online. La procedura necessaria
viene descritta di seguito.
Passo
Selezione nella
barra degli
strumenti
Selezionare la voce di menu
Progetto > Collega al sistema di destinazione
Fare clic sull'apparecchio di azionamento i cui parametri devono essere
ripristinati all'impostazione di fabbrica e selezionare il simbolo Ripristina
impostazioni di fabbrica nella barra degli strumenti.
Rispondere OK alla richiesta di conferma.
Selezionare la voce di menu Sistema di destinazione > Copia da RAM a ROM
Nota
Copia da RAM a ROM
Il simbolo di Copia da RAM a ROM può essere selezionato solo se l'apparecchio di
azionamento è selezionato nella navigazione di progetto.
Dopo un ripristino dei parametri all'impostazione di fabbrica è necessario eseguire una prima
messa in servizio.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
185
Messa in servizio
5.8 Ripristino dei parametri all'impostazione di fabbrica
Convertitori da incasso
186
Istruzioni operative, 04/2014, A5E00386872A
6
Comando
6.1
Contenuto del capitolo
Questo capitolo descrive:
● Principi del sistema di azionamento
● Selezione della sorgente di comando tramite
- PROFIdrive
- morsettiera TM31
- morsettiera CU320
● Impostazione del valore di riferimento via
- PROFIdrive
- ingressi analogici
- potenziometro motore
- valori di riferimento fissi
● Comunicazione secondo PROFIdrive
● Comunicazione via
- PROFIBUS DP
- PROFINET IO
- SINAMICS Link
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
187
Comando
6.2 Informazioni generali sulle sorgenti dei comandi e di riferimento
6.2
Informazioni generali sulle sorgenti dei comandi e di riferimento
Descrizione
Sono disponibili 4 preimpostazioni per la selezione delle sorgenti di comando e 4
preimpostazioni per la selezione delle sorgenti del valore di riferimento di SINAMICS G130.
È disponibile anche l'opzione "nessuna selezione", con cui non viene effettuata alcuna
preimpostazione della sorgente di comando e del valore di riferimento.
Sorgenti dei comandi
● PROFIdrive
● Morsetti TM31
● Morsetti CU
● PROFIdrive+TM31
Sorgenti del valore di riferimento
● PROFIdrive
● Ingressi analogici
● Potenziometro motore
● Valori di riferimento fissi
Le impostazioni vengono spiegate nelle sezioni seguenti.
Nota
Preimpostazioni
Le opportune preimpostazioni per la configurazione del sistema devono essere selezionate
al momento della messa in servizio (per maggiori informazioni vedere il capitolo "Messa in
servizio").
Schemi logici
In alcuni punti di questo capitolo si fa riferimento a schemi logici con fogli identificati da
numeri a 4 cifre. Questi si trovano nel CD nel "Manuale delle liste SINAMICS G130/G150", in
cui è descritta nei dettagli la funzionalità complessiva ad uso degli utenti più esperti.
Convertitori da incasso
188
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.3 Principi del sistema di azionamento
6.3
Principi del sistema di azionamento
6.3.1
Parametro
Panoramica
L'azionamento viene adattato al compito da svolgere mediante l’impostazione di parametri.
Ogni parametro viene contrassegnato con un numero univoco e con attributi specifici (ad es.
leggibile, scrivibile, attributo BICO, attributo di gruppo, ecc.).
L'accesso ai parametri è possibile tramite le seguenti unità di comando:
● PC con tool di messa in servizio "STARTER" tramite PROFIBUS
● Pannello operativo "comfort" AOP30
Tipi di parametri
Esistono parametri di impostazione e parametri di supervisione:
● Parametri di impostazione (leggibili e scrivibili)
Questi parametri influenzano direttamente il comportamento di una funzione.
Esempio: Tempo di accelerazione e decelerazione del generatore di rampa
● Parametri di supervisione (solo lettura)
Questi parametri permettono di visualizzare grandezze interne.
Esempio: corrente attuale del motore
Figura 6-1
Tipi di parametri
Tutti questi parametri dell'azionamento possono essere letti e modificati tramite PROFIBUS
con i meccanismi definiti nel profilo PROFIdrive.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
189
Comando
6.3 Principi del sistema di azionamento
Classificazione dei parametri
I parametri dei singoli oggetti di azionamento (vedere il capitolo "Oggetti di azionamento
(Drive Objects)") vengono suddivisi in set di dati (vedere il capitolo "Uso/set di dati") nel
seguente modo:
● Parametri indipendenti da set di dati
Questi parametri sono presenti una sola volta per ogni oggetto di azionamento.
● Parametri dipendenti da set di dati
Questi parametri possono essere presenti più volte per ogni oggetto di azionamento e
possono essere indirizzati tramite l'indice dei parametri per la lettura e la scrittura. Si
distinguono vari tipi di set di dati:
– CDS: Command Data Set, set di dati di comando
Mediante un'opportuna parametrizzazione di più set di dati dei comandi e la
commutazione dei set di dati è possibile far funzionare l'azionamento con varie
sorgenti dei segnali preconfigurate.
– DDS: Drive Data Set - set di dati dell'azionamento
Nel Drive Data Set sono riassunti i parametri per la commutazione della
parametrizzazione della regolazione dell'azionamento.
I set di dati CDS e DDS possono essere commutati durante il funzionamento. Esistono
inoltre altri tipi di set di dati che però possono essere attivati solo indirettamente tramite
una
commutazione del DDS.
– EDS: Encoder Data Set - set di dati dell'encoder
– MDS: Motor Data Set - set di dati del motore
Convertitori da incasso
190
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.3 Principi del sistema di azionamento
Figura 6-2
Classificazione dei parametri
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
191
Comando
6.3 Principi del sistema di azionamento
6.3.2
Oggetti di azionamento (Drive Objects)
Un oggetto di azionamento è una funzionalità software indipendente che ha i propri
parametri ed eventualmente anche le proprie anomalie e i propri avvisi. Gli oggetti di
azionamento possono essere presenti per impostazione predefinita (ad es. rilevazione
ingressi/uscite), si possono creare in modo semplice (ad es. Option Board) o anche più volte
(ad es. regolazione azionamento).
Figura 6-3
Oggetti di azionamento - Drive Objects
Oggetti di azionamento presenti per impostazione predefinita
● Regolazione azionamento
La regolazione azionamento accetta la regolazione del motore. Alla regolazione
azionamento sono assegnati 1 Power Module, almeno 1 motore e massimo 3 encoder.
● Control Unit, ingressi/uscite
Gli ingressi/uscite presenti sulla Control Unit vengono analizzati nell'ambito di un oggetto
di azionamento.
Oggetti di azionamento opzionali
● Valutazione Option Board
Un ulteriore oggetto di azionamento esegue la valutazione di una Option Board
eventualmente inserita. Il funzionamento specifico dipende dal tipo di Option Board.
● Valutazione Terminal Module
La valutazione dei Terminal Module collegabili opzionalmente è affidata ad uno specifico
oggetto di azionamento.
Convertitori da incasso
192
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.3 Principi del sistema di azionamento
Proprietà di un oggetto di azionamento
● Propria area parametri
● Propria finestra in STARTER
● Proprio sistema di anomalia/avviso
● Proprio telegramma PROFIdrive per dati di processo
Configurazione di oggetti di azionamento
Gli "oggetti di azionamento" elaborati via software nella Control Unit vengono impostati in
STARTER alla prima messa in servizio mediante dei parametri di configurazione. In una
Control Unit si possono creare diversi oggetti di azionamento (Drive Objects).
Gli oggetti di azionamento sono blocchi funzionali configurabili con i quali si possono
eseguire determinate funzioni di azionamento.
Se dopo la prima messa in servizio devono essere configurati ulteriori oggetti di
azionamento, bisogna utilizzare la modalità di configurazione del sistema di azionamento.
Si può accedere ai parametri di un oggetto di azionamento soltanto dopo aver configurato
l'oggetto in questione ed essere entrati nella modalità di parametrizzazione.
Nota
Assegnazione durante la prima messa in servizio
Ad ogni oggetto di azionamento presente (Drive Object) viene assegnato alla prima messa
in servizio un numero da 0 a 63 per la sua identificazione.
Parametri
● p0101 Numeri degli oggetti di azionamento
● r0102 Numero di oggetti di azionamento
● p0107 Tipo di oggetti di azionamento
● p0108 Configurazione oggetti di azionamento
6.3.3
Record di dati
Descrizione
Per molte applicazioni risulta vantaggioso poter modificare più parametri durante il
funzionamento o nella condizione di pronto al funzionamento con un solosegnale esterno.
Questa funzionalità si realizza con l’ausilio dei parametri indicizzati. Nel far ciò i parametri
vengono raggruppati e indicizzati in un gruppo (set di dati) in base alla loro funzionalità. Con
l'indicizzazione si possono memorizzare in ogni parametro diverse impostazioni, che a loro
volta vengono attivate commutando il set di dati.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
193
Comando
6.3 Principi del sistema di azionamento
Nota
Copia dei set di dati
In STARTER possono essere copiati i set di dati di comando e di azionamento
(Azionamento -> Configurazione -> Scheda "Set di dati di comando" o "Set di dati
azionamento").
Nelle finestre STARTER interessate è possibile selezionare il set di dati di azionamento
visualizzato.
CDS: Set di dati di comando (CDS, Command Data Set)
In un set di dati di comando sono raccolti i parametri BICO (ingressi binettore e connettore).
Questi parametri gestiscono l'interconnessione delle sorgenti dei segnali di un azionamento
(vedere il capitolo "Uso/Tecnica BICO: interconnessione di segnali").
Tramite opportuna parametrizzazione di più set di dati di comando e commutazione dei set
di dati, è possibile far funzionare l'azionamento con diverse sorgenti di segnale
preconfigurate.
Un set di dati di comando comprende (esempi):
● Ingressi binettore per istruzioni di controllo (segnali digitali)
– ON/OFF, abilitazioni (p0844, ecc.)
– Funzionamento a impulsi (p1055, ecc.)
● Ingressi connettore per valori di riferimento (segnali analogici)
– Valore di riferimento di tensione per controllo U/f (p1330)
– Valori limite della coppia e fattori di scala (p1522, p1523, p1528, p1529)
Lo stato di fornitura prevede due set di dati di comando, tramite p0170 (numero set di dati di
comando (CDS)) è possibile aumentare questo numero fino a max. quattro.
Per selezionare i set di dati di comando e per visualizzare quello selezionato, attualmente
sono disponibili i seguenti parametri:
Tabella 6- 1
Set di dati comando: selezione e visualizzazione
Selezione bit 1
Selezione bit 0
p0811
p0810
selezionata
(r0836)
attiva (r0050)
0
0
0
0
0
1
0
1
1
1
2
1
0
2
2
3
1
1
3
3
CDS
Visualizzazione
Se si seleziona un set di dati di comando non esistente, resta attivo il set di dati attuale.
Convertitori da incasso
194
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.3 Principi del sistema di azionamento
Figura 6-4
Esempio: commutazione tra il set di dati di comando 0 e 1
DDS: Set di dati dell'azionamento (Drive Data Set)
Un set di dati dell'azionamento contiene vari parametri di impostazione rilevanti per la
regolazione e il comando di un azionamento:
● Numeri dei set di dati motore e encoder assegnati:
– p0186: Set di dati del motore assegnato (MDS)
– Da p0187 a p0189: fino a 3 set di dati encoder assegnati (EDS)
● Vari parametri di regolazione, come ad es.:
– Valori di riferimento fissi per numeri di giri (da p1001 a p1015)
– Limiti di numero di giri min./max. (p1080, p1082)
– Dati caratteristici del generatore di rampa (p1120 e segg.)
– Dati caratteristici del regolatore (p1240 e segg.)
– ...
I parametri raccolti in un set di dati dell'azionamento sono identificati nella lista parametri
SINAMICS con "Set di dati DDS" e sono provvisti dell'indice [0..n].
È possibile la parametrizzazione di più set di dati dell'azionamento. Risulta così più semplice
la commutazione tra diverse configurazioni dell'azionamento (tipo di regolazione, motore,
encoder) grazie alla selezione del corrispondente set di dati.
Un oggetto di azionamento può gestire al massimo 32 set di dati dell'azionamento. La
selezione dei set di dati dell'azionamento viene configurata con p0180.
Per selezionare un set di dati dell'azionamento si usano gli ingressi binettore da p0820 a
p0824. Questi formano il numero del set di dati dell'azionamento (da 0 a 31) in formato
binario (con p0824 come bit più significativo).
● p0820 BI: Selezione set di dati dell'azionamento DDS bit 0
● p0821 BI: Selezione set di dati dell'azionamento DDS bit 1
● p0822 BI: Selezione set di dati dell'azionamento DDS bit 2
● p0823 BI: Selezione set di dati dell'azionamento DDS bit 3
● p0824 BI: Selezione set di dati dell'azionamento DDS bit 4
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
195
Comando
6.3 Principi del sistema di azionamento
Condizioni marginali e raccomandazioni
● Raccomandazione per il numero di DDS di un azionamento:
il numero di DDS di un azionamento deve corrispondere alle possibilità di commutazione,
per cui deve essere valido quanto segue:
p0180 (DDS) ≥ p0130 (MDS)
● Numero massimo di DDS per un oggetto di azionamento = 32 DDS
EDS: Set di dati dell'encoder (Encoder Data Set)
Un set di dati dell'encoder contiene vari parametri di impostazione dell'encoder collegato che
sono rilevanti per la configurazione dell'azionamento.
● Parametri di impostazione, ad es.:
– Numero di componente interfaccia encoder (p0141)
– Numero di componente encoder (p0142)
– Selezione tipo di encoder (p0400)
I parametri raccolti in un set di dati dell'encoder sono identificati nella lista parametri
SINAMICS con "Set di dati EDS" e provvisti dell'indice [0..n].
Per ogni encoder gestito dalla Control Unit è necessario un set di dati specifico. Ad un set di
dati dell'azionamento vengono assegnati fino a 3 set di dati dell'encoder tramite i parametri
p0187, p0188 e p0189.
Una commutazione del set di dati dell'encoder può avvenire solo tramite una commutazione
DDS.
Ogni encoder può essere associato a un solo azionamento e all'interno di quest'ultimo, nel
set di dati dell'azionamento, deve essere sempre l'encoder 1, 2 o 3.
Un'applicazione per la commutazione EDS può essere ad esempio una parte di potenza con
la quale possono essere azionati alternativamente più motori. Per passare da un motore
all'altro si utilizza una commutazione di protezione. Ciascuno dei motori può essere dotato di
un encoder o essere azionato senza encoder. Ogni encoder deve essere collegato ad un
proprio SMx.
Se l'encoder 1 (p0187) viene commutato tramite DDS, è necessario commutare anche un
MDS.
Un oggetto di azionamento può gestire al massimo 16 set di dati dell'encoder. Il numero dei
set di dati dell'encoder configurati è indicato in p0140.
Selezionando un set di dati dell'azionamento si selezionano anche i set di dati assegnati
dell'encoder.
Convertitori da incasso
196
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.3 Principi del sistema di azionamento
MDS: Set di dati del motore (Motor Data Set)
Un set di dati del motore contiene vari parametri di impostazione del motore collegato che
sono rilevanti per la configurazione dell'azionamento. Inoltre contiene alcuni parametri di
supervisione con dati calcolati.
● Parametri di impostazione, ad es.:
– Numero di componente motore (p0131)
– Selezione tipo di motore (p0300)
– Dati nominali motore (p0304 e segg.)
– ...
● Parametri di supervisione, ad es.:
– Dati nominali calcolati (r0330 e segg.)
– ...
I parametri raccolti in un set di dati del motore sono identificati nella lista parametri
SINAMICS con "Set di dati MDS" e sono provvisti dell'indice [0..n].
Per ogni motore comandato dalla Control Unit tramite un Motor Module è necessario un
proprio set di dati del motore. Il set di dati del motore viene assegnato a un set di dati
dell'azionamento mediante il parametro p0186.
Una commutazione del set di dati può avvenire solo tramite una commutazione DDS.
La commutazione del set di dati del motore viene utilizzata ad esempio nei casi seguenti:
● commutazione di motori diversi
● commutazione di diversi avvolgimenti di un motore (ad es. commutazione stella-triangolo)
● adattamento dei dati motore
Se più motori vengono fatti funzionare alternativamente con uno stesso Motor Module, è
necessario creare un numero corrispondente di set di dati dell'azionamento. Per maggiori
informazioni sulla commutazione del motore, vedere il capitolo "Funzioni/Funzioni
dell'azionamento".
Un oggetto di azionamento può gestire al massimo 16 set di dati del motore. Il numero dei
set di dati del motore in p0130 non può superare quello dei set di dati dell'azionamento in
p0180.
Esempio di assegnazione del set di dati
Tabella 6- 2
Esempio di assegnazione del set di dati
DDS
Motore (p0186)
Encoder 1 (p0187) Encoder 2 (p0188) Encoder 3 (p0189)
DDS 0
MDS 0
EDS 0
EDS 1
EDS 2
DDS 1
MDS 0
EDS 0
EDS 3
--
DDS 2
MDS 0
EDS 0
EDS 4
EDS 5
DDS 3
MDS 1
EDS 0
--
--
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
197
Comando
6.3 Principi del sistema di azionamento
Copia di set di dati di comando (CDS)
Impostare il parametro p0809 nel seguente modo:
1. p0809[0] = numero del set di dati di comando da copiare (sorgente)
2. p0809[1] = numero del set di dati di comando nel quale deve essere effettuata la copia
(destinazione)
3. p0809[2] = 1
La copia viene avviata.
La copia termina quando p0809[2] = 0.
Copia di un set di dati dell'azionamento (DDS)
Impostare il parametro p0819 nel seguente modo:
1. p0819[0] = numero del set di dati dell'azionamento da copiare (sorgente)
2. p0819[1] = numero del set di dati dell'azionamento nel quale deve essere effettuata la
copia (destinazione)
3. p0819[2] = 1
La copia viene avviata.
La copia termina quando p0819[2] = 0.
Copia di set di dati del motore (MDS)
Impostare il parametro p0139 nel seguente modo:
1. p0139[0] = numero del set di dati motore che deve essere copiato (sorgente)
2. p0139[1] = numero del set di dati motore in cui deve essere eseguita la copia
(destinazione)
3. p0139[2] = 1
La copia viene avviata.
La copia termina quando p0139[2] = 0.
Schema logico
FP 8560
Set di dati di comando (Command Data Set, CDS)
FP 8565
Set di dati dell'azionamento (Drive Data Set, DDS)
FP 8570
Set di dati dell'encoder (Encoder Data Set, EDS)
FP 8575
Set di dati del motore (Motor Data Set, MDS)
Convertitori da incasso
198
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.3 Principi del sistema di azionamento
Parametri
6.3.4
• p0120
Quantità di set di dati della parte di potenza (PDS)
• p0130
Quantità di set di dati motore (MDS)
• p0139[0...2]
Copia di set di dati del motore (MDS)
• p0140
Quantità di set di dati dell'encoder (EDS)
• p0170
Quantità di set di dati di comando (CDS)
• p0180
Quantità di set di dati dell'azionamento (DDS)
• p0186
Set di dati del motore assegnato (MDS)
• p0187[0...n]
Encoder 1, numero set di dati dell'encoder
• p0188[0...n]
Encoder 2, numero set di dati dell'encoder
• p0189[0...n]
Encoder 3, numero set di dati dell'encoder
• p0809
Copia di set di dati di comando CDS
• p0810
BI: Set di dati di comando CDS bit 0
• p0811
BI: Set di dati di comando CDS bit 1
• p0819[0...2]
Copia di un set di dati dell'azionamento (DDS)
• p0820
BI: Selezione set di dati dell'azionamento bit 0
• p0821
BI: Selezione set di dati dell'azionamento bit 1
• p0822
BI: Selezione set di dati dell'azionamento bit 2
• p0823
BI: Selezione set di dati dell'azionamento bit 3
• p0824
BI: Selezione set di dati dell'azionamento bit 4
Tecnica BICO: interconnessione di segnali
Descrizione
In ogni apparecchio di azionamento esistono molteplici grandezze di ingresso e di uscita
nonché varie grandezze di regolazione interne.
Con la tecnica BICO (acronimo inglese per Binector Connector Technology) è possibile
adattare l'apparecchio di azionamento alle più disparate esigenze.
I segnali digitali che possono essere interconnessi liberamente tramite parametri BICO sono
identificati nei nomi dei parametri con le lettere iniziali BI, BO, CI o CO. Questi parametri
sono opportunamente contrassegnati anche nella lista parametri o negli schemi logici.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
199
Comando
6.3 Principi del sistema di azionamento
Nota
Uso di STARTER
Per impiegare la tecnica BICO si consiglia di usare il tool di parametrizzazione e messa in
servizio STARTER.
Binettori, BI: ingresso binettore, BO: Uscita binettore
Un binettore è un segnale digitale (binario) senza unità che può assumere il valore 0 o 1.
I binettori si suddividono in ingressi binettore (ricevitore del segnale) e uscite binettore
(sorgente del segnale).
Tabella 6- 3
Binettori
Abbreviazione e
simbolo
Nome
Ingresso binettore
Binector Input
Descrizione
Può essere interconnesso con un'uscita binettore
come sorgente.
(ricevitore del segnale)
Il numero dell'uscita binettore deve essere
immesso come valore del parametro.
Uscita binettore
Può essere usata come sorgente per un ingresso
binettore.
Binector Output
(sorgente del segnale)
Connettori, CI: ingresso connettore, CO: Uscita connettore
Un connettore è un segnale digitale, ad es. in formato a 32 bit, Esso può essere utilizzato
per la rappresentazione di parole (16 bit), doppie parole (32 bit) o segnali analogici. I
connettori si suddividono in ingressi connettore (ricevitore del segnale) e uscite connettore
(sorgente del segnale).
Per motivi legati alle prestazioni, le possibilità di interconnessione dei connettori sono
limitate.
Tabella 6- 4
Connettori
Abbreviazione e
simbolo
Nome
Ingresso connettore
Connector Input
Descrizione
Pu essere interconnesso a un'uscita connettore
come sorgente.
(ricevitore del segnale) Il numero dell'uscita connettore deve essere
immesso come valore del parametro.
Uscita connettore
Connector Output
Può essere usata come sorgente per un ingresso
connettore.
(sorgente del segnale)
Convertitori da incasso
200
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.3 Principi del sistema di azionamento
Interconnessione di segnali con tecnica BICO
Per interconnettere due segnali occorre assegnare il parametro di uscita BICO desiderato
(sorgente del segnale) a un parametro di ingresso BICO (ricevitore del segnale).
Per interconnettere un ingresso binettore/connettore a un'uscita binettore/connettore sono
necessarie le seguenti informazioni:
• Binettori:
numero di parametro, numero di bit e Drive Object ID
• Connettori senza indice:
numero di parametro e Drive Object ID
• Connettori con indice:
numero di parametro, indice e Drive Object ID
Figura 6-5
Interconnessione di segnali con tecnica BICO
Nota
Un'ingresso connettore (CI) non può essere interconnesso a piacere con ogni uscita
connettore (CO, sorgente di segnale). Lo stesso vale per l'ingresso binettore (BI) e l'uscita
binettore (BO).
Nella lista parametri è applicata per ogni parametro CI e BI, alla voce "Tipo di dati",
l'informazione per il tipo di dati del parametro e per il tipo di dati del parametro BICO.
Al parametro CO e al parametro BO corrisponde solo il tipo di dati del parametro BICO.
Notazione
• Tipi di dati ingresso BICO: tipo di dati parametro / tipo di dati parametro BICO
Esempio: Unsigned32 / Integer16
• Tipi di dati uscita BICO: tipo di dati parametro BICO
Esempio: FloatingPoint32
Le interconnessioni possibili tra ingresso BICO (ricevitore del segnale) e uscita BICO
(sorgente del segnale) sono descritte nel Manuale delle liste al capitolo "Spiegazioni relative
alla lista dei parametri" nella tabella "Combinazioni possibili per le interconnessioni BICO".
L'interconnessione tramite parametri BICO può essere eseguita in diversi set di dati di
comando (CDS, DDS, MDS, ...). Commutando i set di dati, la diversa interconnessione
diventa attiva nei set di dati. È possibile anche l'interconnessione tramite oggetti di
azionamento.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
201
Comando
6.3 Principi del sistema di azionamento
Codifica interna dei parametri di uscita binettore/connettore
La codifica interna è necessaria ad es. per scrivere parametri d'ingresso BICO tramite
PROFIdrive.
Figura 6-6
Codifica interna dei parametri di uscita binettore/connettore
Esempio 1: interconnessione di segnali digitali
Un azionamento deve essere comandato tramite i morsetti DI 0 e DI 1 della Control Unit con
JOG 1 e JOG 2.
Figura 6-7
Interconnessione di segnali digitali (esempio)
Esempio 2: interconnessione di BB/OFF3 con più azionamenti
Il segnale OFF3 deve essere interconnesso con due azionamenti tramite il morsetto DI 2
della Control Unit.
Per ogni azionamento esiste un ingresso connettore 1. OFF3 e 2. OFF3. I due segnali
vengono elaborati tramite interconnessione AND alla parola di comando STW1.2 (OFF3).
Convertitori da incasso
202
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.3 Principi del sistema di azionamento
Figura 6-8
Interconnessione di OFF3 con più azionamenti (esempio)
Interconnessioni BICO con altri azionamenti
Per le interconnessioni BICO di un azionamento con altri azionamenti esistono i seguenti
parametri:
• r9490
Numero di interconnessioni BICO con altri azionamenti
• r9491[0...15]
BI/CI delle interconnessioni BICO con altri azionamenti
• r9492[0...15]
BO/CO delle interconnessioni BICO con altri azionamenti
• p9493[0...15]
Ripristino delle interconnessioni BICO con altri azionamenti
Convertitore binettore-connettore e convertitore connettore-binettore
Convertitore binettore-connettore
● Più segnali digitali vengono convertiti in una parola doppia Integer a 32 bit o in una parola
Integer a 16 bit.
● p2080[0...15] BI: PROFIdrive Invio dati di processo bit per bit
Convertitore connettore-binettore
● Una parola doppia Integer a 32 bit o una parola Integer a 16 bit viene convertita in segnali
digitali singoli.
● p2099[0...1] CI: PROFIdrive Selezione PZD ricevuto bit per bit
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
203
Comando
6.3 Principi del sistema di azionamento
Valori fissi per l'interconnessione tramite tecnica BICO
Per l'interconnessione di valori fissi impostabili liberamente esistono le seguenti uscite
connettore:
• p2900[0...n]
CO: Val.fisso _%_1
• p2901[0...n]
CO: Val.fisso _%_2
• p2930[0...n]
CO: Val.fisso _M_1
Esempio:
Questi parametri possono essere usati per interconnettere il fattore di scala per il valore di
riferimento principale o per interconnettere una coppia supplementare.
6.3.5
Propagazione di anomalie
Inoltro di anomalie della Control Unit
In caso di anomalie attivate sull'oggetto di azionamento "Control Unit", si suppone sempre
che siano interessate le funzioni centrali dell'azionamento. Pertanto queste anomalie
vengono inoltrate anche a tutti gli altri oggetti di azionamento. Questa operazione è
denominata "Propagazione". Le reazioni all'anomalia agiscono sull'oggetto di azionamento
Control Unit e su tutti gli altri oggetti di azionamento. Questo comportamento vale anche per
le anomalie impostate in uno schema DCC sulla Control Unit con l'ausilio del blocco DCC.
Un'anomalia propagata dalla Control Unit deve essere confermata su tutti gli oggetti di
azionamento a cui l'anomalia è stata inoltrata. In tal modo l'anomalia viene confermata
automaticamente sulla Control Unit. In alternativa, tutte le anomalie degli oggetti di
azionamento possono essere confermate sulla Control Unit.
Gli avvisi non vengono propagati dalla Control Unit, ossia non vengono inoltrati ad altri
oggetti di azionamento.
Esempio
Le anomalie di oggetti di azionamento vengono inoltrate solo agli azionamenti; ciò significa
che un'anomalia su un TB30 arresta l'azionamento, ma un'anomalia sull'azionamento non
arresta il TB30.
Inoltro di anomalie sulla base di interconnessioni BICO
Se due o più oggetti di azionamento sono collegati tramite interconnessioni BICO, le
anomalie di oggetti di azionamento del tipo Control Unit, TB30, DMC20, DME20 vengono
inoltrate a tutti i Terminal Module o ENCODER su oggetti di azionamento con funzioni di
regolazione, come ad es. alimentatori o Motor Module. All'interno di questi due gruppi di tipi
di oggetti di azionamento non si ha alcun inoltro di anomalie.
Questo comportamento vale anche per le anomalie impostate in uno schema DCC sui tipi di
oggetti di azionamento citati con l'ausilio di DCC STM.
Convertitori da incasso
204
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.4 Sorgenti dei comandi
6.4
Sorgenti dei comandi
6.4.1
Preimpostazione "PROFIdrive"
Presupposti
● Power Module e Control Unit sono presenti e installati correttamente
● L'impostazione "PROFIdrive" è stata selezionata al momento della messa in servizio:
• STARTER (p0700):
"PROFIdrive"
• AOP30 (p0700):
"1: G130 PROFIdrive"
Sorgenti dei comandi
Figura 6-9
Sorgenti dei comandi - AOP30 <-> PROFIdrive
Priorità
La priorità delle sorgenti dei comandi è illustrata nella figura "Sorgenti dei comandi - AOP30
<-> PROFIdrive".
Nota
Priorità di comando LOCAL
Con la priorità di comando LOCAL tutti i valori di riferimento aggiuntivi vengono disattivati.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
205
Comando
6.4 Sorgenti dei comandi
Occupazione dei morsetti CU320 con la preimpostazione "PROFIdrive"
La selezione della preimpostazione "PROFIdrive" produce la seguente occupazione dei
morsetti per la Control Unit:
Figura 6-10
Occupazione dei morsetti della Control Unit con la preimpostazione "PROFIdrive"
Parola di comando 1
L'occupazione dei bit per la parola di comando 1 è descritta nella sezione "Descrizione delle
parole di comando e dei valori di riferimento".
Parola di stato 1
L'occupazione dei bit per la parola di stato 1 è descritta nella sezione "Descrizione delle
parole di stato e dei valori attuali".
Commutazione della sorgente dei comandi
La sorgente di comando può essere commutata tramite il tasto LOCAL/REMOTE
sull'AOP30.
Convertitori da incasso
206
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.4 Sorgenti dei comandi
6.4.2
Preimpostazione "Morsetti TM31"
Presupposti
● Power Module, Control Unit e TM31 sono presenti e installati correttamente
● La preimpostazione "Morsetti TM31" è stata selezionata al momento della messa in
servizio:
• STARTER (p0700):
"Morsetti TM31"
• AOP30 (p0700):
"2: Morsetti TM31
Sorgenti dei comandi
Figura 6-11
Sorgenti dei comandi AOP30 <-> morsetti TM31
Priorità
La priorità delle sorgenti dei comandi è illustrata nella figura "Sorgenti dei comandi AOP30 <> Morsetti TM31".
Nota
Priorità di comando LOCAL
Con la priorità di comando LOCAL tutti i valori di riferimento aggiuntivi vengono disattivati.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
207
Comando
6.4 Sorgenti dei comandi
Occupazione dei morsetti TM31 con la preimpostazione "Morsetti TM31"
La selezione della preimpostazione "Morsetti TM31" produce la seguente occupazione dei
morsetti per il TM31:
Figura 6-12
Occupazione dei morsetti TM31 con la preimpostazione "Morsetti TM31"
Commutazione della sorgente dei comandi
La sorgente di comando può essere commutata tramite il tasto LOCAL/REMOTE
sull'AOP30, come necessario.
Convertitori da incasso
208
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.4 Sorgenti dei comandi
6.4.3
Preimpostazione "Morsetti CU"
Presupposti
● Power Module e Control Unit sono presenti e installati correttamente
● La preimpostazione "Morsetti CU" è stata selezionata al momento della messa in
servizio:
• STARTER (p0700):
"Morsetti CU"
• AOP30 (p0700):
"3: Morsetti CU"
Sorgenti dei comandi
Figura 6-13
Sorgenti dei comandi AOP30 <-> Morsetti CU
Priorità
La priorità delle sorgenti dei comandi è illustrata nella figura "Sorgenti dei comandi AOP30 <> Morsetti CU".
Nota
Priorità di comando LOCAL
Con la priorità di comando LOCAL tutti i valori di riferimento aggiuntivi vengono disattivati.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
209
Comando
6.4 Sorgenti dei comandi
Occupazione dei morsetti della Control Unit con la preimpostazione "Morsetti CU"
La selezione della preimpostazione "Morsetti CU" produce la seguente occupazione dei
morsetti per la Control Unit:
Figura 6-14
Occupazione dei morsetti della Control Unit con la preimpostazione "Morsetti CU"
Commutazione della sorgente dei comandi
La sorgente di comando può essere commutata tramite il tasto LOCAL/REMOTE
sull'AOP30, come necessario.
Convertitori da incasso
210
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.4 Sorgenti dei comandi
6.4.4
Preimpostazione "PROFIdrive+TM31"
Presupposti
● Power Module, Control Unit, TM31 e PROFIBUS sono presenti e installati correttamente
● La preimpostazione "PROFIdrive+TM31" è stata selezionata al momento della messa in
servizio:
• STARTER (p0700):
"PROFIdrive+TM31"
• AOP30 (p0700):
"4: PROFIdrive+TM31"
Sorgenti dei comandi
Figura 6-15
Sorgenti dei comandi - AOP30 <-> PROFIdrive+TM31
Priorità
La priorità delle sorgenti dei comandi è illustrata nella figura "Sorgenti dei comandi - AOP30
<-> PROFIdrive+TM31".
Nota
Priorità di comando LOCAL
Con la priorità di comando LOCAL tutti i valori di riferimento aggiuntivi vengono disattivati.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
211
Comando
6.4 Sorgenti dei comandi
Occupazione dei morsetti TM31 con la preimpostazione "PROFIdrive+TM31"
Figura 6-16
Occupazione dei morsetti TM31 con la preimpostazione "PROFIdrive+TM31"
Commutazione della sorgente dei comandi
La sorgente di comando può essere commutata tramite il tasto LOCAL/REMOTE
sull'AOP30, come necessario.
Convertitori da incasso
212
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.5 Sorgenti del valore di riferimento
6.5
Sorgenti del valore di riferimento
6.5.1
Ingressi analogici
Descrizione
Sulla morsettiera utente TM31 sono disponibili due ingressi analogici per l'introduzione dei
valori di riferimento tramite segnali in tensione o corrente.
Nelle impostazioni di fabbrica, l'ingresso analogico 0 (morsetto X521:1/2) viene utilizzato
come ingresso in tensione nell'intervallo 0 ... 10 V.
Presupposti
● La TM31 è presente e installata correttamente
● La preimpostazione per ingressi analogici è stata selezionata al momento della messa in
servizio:
• STARTER (p1000):
"Morsetti TM31"
• AOP30 (p1000):
"2: Morsetti TM31"
Schema del flusso dei segnali
Figura 6-17
Schema del flusso dei segnali: ingresso analogico 0
Schema logico
FP 9566
TM31 - Ingresso analogico 0 (AI 0)
FP 9568
TM31 - Ingresso analogico 1 (AI 1)
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
213
Comando
6.5 Sorgenti del valore di riferimento
Parametri
• r4052
Tensione / corrente di ingresso attuale
• p4053
Costante del tempo di livellamento ingressi analogici
• r4055
Valore di ingresso attuale riferito
• p4056
Tipo di ingressi analogici
• p4057
Valore x1 della curva caratteristica degli ingressi analogici
• p4058
Valore y1 della curva caratteristica degli ingressi analogici
• p4059
Valore x2 della curva caratteristica degli ingressi analogici
• p4060
Valore y2 della curva caratteristica degli ingressi analogici
• p4063
Offset ingressi analogici
Nota
Stato di fornitura:
Allo stato di fornitura e dopo la messa in servizio di base, una tensione di ingresso di 10 V
corrisponde al valore di riferimento principale 100% del numero di giri di riferimento (p2000)
che è stato impostato al numero di giri massimo (p1082).
Esempio per la modifica dell'ingresso analogico 0 da ingresso in tensione ad ingresso in corrente 0 ...
20 mA
Commutazione corrente/tensione
Impostare il commutatore per corrente-tensione su "Corrente"
("I")
Impostazione del tipo di ingresso analogico 0 a 0 ... 20 mA
Nota
Salvataggio delle modifiche in modo protetto contro le interruzioni di rete
Per la protezione in caso di interruzioni di rete, la modifica dell'ingresso analogico deve
essere anche memorizzata sulla scheda CompactFlash.
F3505 – Anomalia "Interruzione cavo dell'ingresso analogico"
L'anomalia si verifica quando il tipo di ingresso analogico (p4056) è impostato a 3 (4 ... 20
mA con sorveglianza rottura conduttori) e il valore della corrente di ingresso è sceso sotto 2
mA.
Tramite il codice dell'anomalia si può determinare l'ingresso analogico coinvolto.
Convertitori da incasso
214
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.5 Sorgenti del valore di riferimento
Numero componente
3: 1. TM31
4: 2. TM31
0: ingresso analogico 0: -X521:1/2
1: ingresso analogico 1: -X521:3/4
6.5.2
Potenziometro motore
Descrizione
Il potenziometro motore digitale consente un'impostazione del numero dei giri telecomandata
tramite segnali logici (tasti +/-). L'attivazione avviene tramite morsetti o bus di campo. Se
all'ingresso del segnale "Incremento MOP" (Incremento del riferimento) è applicato un 1
logico, il contatore interno aumenta il valore di riferimento. Il tempo di integrazione (velocità
di incremento della modifica del valore di riferimento) può essere impostato con il parametro
p1047. Tramite l'ingresso di segnale "Decremento MOP" il riferimento può essere ridotto. La
rampa di decelerazione può essere impostata tramite il parametro p1048.
Il parametro di configurazione p1030.0 = 1 (impostazione di fabbrica = 0) attiva il salvataggio
nella memoria non volatile del valore attuale del potenziometro motore al momento della
disinserzione. All'inserzione il valore di partenza del potenziometro motore viene impostato
all'ultimo valore attuale al momento della disinserzione.
Presupposti
La preimpostazione per il potenziometro motore è stata selezionata al momento della messa
in servizio:
• STARTER (p1000):
"Potenziometro motore"
• AOP30 (p1000):
"3: Potenziometro motore"
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
215
Comando
6.5 Sorgenti del valore di riferimento
Schema del flusso dei segnali
Figura 6-18
Schema del flusso dei segnali: Potenziometro motore
Schema logico
FP 3020
Potenziometro motore
• p1030
Potenziometro motore, configurazione
• p1037
Potenziometro motore, numero di giri massimo
• p1038
Potenziometro motore, numero di giri minimo
• p1047
Potenziometro motore, tempo di accelerazione
• p1048
Potenziometro motore, tempo di decelerazione
• r1050
Potenziometro motore, riferimento numero di giri dopo generatore di rampa
Parametri
6.5.3
Valori di riferimento fissi per numero di giri
Descrizione
In totale sono disponibili 15 valori di riferimento fissi per numeri di giri impostabili.
Effettuando la preimpostazione delle sorgenti del valore di riferimento durante la messa in
servizio tramite STARTER o pannello di comando, si rendono disponibili 3 valori di
riferimento fissi per numeri di giri. La selezione di questi valori di riferimento fissi per numero
di giri avviene tramite morsetti o bus di campo.
Convertitori da incasso
216
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.5 Sorgenti del valore di riferimento
Presupposti
La preimpostazione per i valori di riferimento fissi per numero di giri è stata selezionata al
momento della messa in servizio:
• STARTER (p1000):
"Valore di riferimento fisso"
• AOP30 (p1000):
"4: Valore di riferimento fisso"
Schema del flusso dei segnali
Figura 6-19
Schema del flusso dei segnali: Valori di riferimento fissi per numero di giri
Schema logico
FP 3010
Valori di riferimento fissi per numero di giri
• p1001
Valore di riferimento fisso per numero di giri 01
• p1002
Valore di riferimento fisso per numero di giri 02
• p1003
Valore di riferimento fisso per numero di giri 03
• r1024
Valore di riferimento fisso del numero di giri attivo
Parametri
Nota
I parametri da p1004 a p1015 forniscono ulteriori valori di riferimento del numero di giri fissi,
che possono essere selezionati mediante i parametri da p1020 a p1023.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
217
Comando
6.6 Comunicazione secondo PROFIdrive
6.6
Comunicazione secondo PROFIdrive
6.6.1
Informazioni generali
PROFIdrive V4.1 è il profilo PROFIBUS e PROFINET per la tecnica di azionamento ad
ampio spettro applicativo nell'automazione di produzione e di processo.
PROFIdrive è indipendente dal sistema di bus utilizzato (PROFIBUS, PROFINET).
Nota
Bibliografia
PROFIdrive per la tecnica di azionamento è descritto nella seguente documentazione:
• Descrizione del sistema PROFIdrive
PROFIBUS User Organization e. V.
Haid-und-Neu-Straße 7, D-76131 Karlsruhe, http://www.profibus.com
IEC 61800-7
Classi di apparecchi PROFIdrive
Tabella 6- 5
Classi di apparecchi PROFIdrive
PROFIdrive
PROFIBUS DP
PROFINET
Peripheral Device (P-Device)
Slave DP
IO-Device
Motion controller (controllore
Master DP di classe 1
IO Controller
Master DP di classe 2
IO Supervisor
sovraordinato o host del
sistema di automazione)
Supervisor (Engineering
Station)
● Apparecchio di azionamento (PROFIBUS: Slave, PROFINET IO: IO Device)
Esempio: Control Unit CU320-2
● Controller (PROFIBUS: Master classe 1, PROFINET IO: IO Controller)
Un controller è tipicamente un controllore sovraordinato in cui viene eseguito il
programma di automazione.
Esempio: SIMATIC S7 e SIMOTION
● Supervisor (PROFIBUS: Master classe 2, PROFINET IO: IO Supervisor)
Apparecchiature per la configurazione, la messa in servizio, l'uso e la supervisione del
bus in funzione e apparecchiature che scambiano solo dati aciclici con gli apparecchi di
azionamento e i controllori.
Esempi: dispositivi di programmazione, apparecchiature di servizio e supervisione
Convertitori da incasso
218
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.6 Comunicazione secondo PROFIdrive
Proprietà di Controller, Supervisor e apparecchi di azionamento
Tabella 6- 6
Proprietà di Controller, Supervisor e Drive Unit
Caratteristiche
Controller, Supervisor
Apparecchio di azionamento
Come nodo del bus
Attivo
Passivo
Invio di messaggi
Consentito senza richiesta
esterna
Possibile solo su richiesta del
controllore
Ricezione di messaggi
Possibile senza limitazioni
Consentite solo ricezione e
conferma
Servizi di comunicazione
Nel profilo PROFIdrive sono definiti 4 servizi di comunicazione:
● Scambio di dati ciclico tramite canale dati ciclico
Durante il funzionamento, i sistemi Motion Control richiedono dati aggiornati per il
controllo e la regolazione. Tramite il sistema di comunicazione tali dati devono essere
inviati agli apparecchi di azionamento come valori di riferimento oppure trasferiti
dall'apparecchio di azionamento come valori attuali. Di solito il trasferimento di questi dati
prevede tempi critici.
● Scambio di dati aciclico tramite canale dati aciclico
È disponibile anche un canale parametri aciclico per lo scambio di parametri tra il
controllore o supervisore e gli apparecchi di azionamento. L'accesso a questi dati non
prevede tempi critici.
● Canale allarmi
Gli allarmi vengono emessi in funzione degli eventi e mostrano la comparsa e
l'eliminazione di stati di errore.
● Funzionamento in sincronismo di clock
Interface IF1 e IF2
La Control Unit può comunicare tramite due interfacce diverse (IF1 e IF2).
Tabella 6- 7
Proprietà di IF1 e IF2
IF1
IF2
PROFIdrive e telegramma
SIEMENS
Sì
No
Sincronismo di clock
Sì
Sì
Tipi di oggetto di azionamento
Tutti
Tutti
Utilizzabile da
PROFINET IO, PROFIBUS DP,
SINAMICS-Link, PN Gate,
Ethernet/IP
PROFINET IO, PROFIBUS DP,
CANopen, SINAMICS Link,
PN Gate, Ethernet/IP
Funzionamento ciclico
Sì
Sì
PROFIsafe
Sì
Sì
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
219
Comando
6.6 Comunicazione secondo PROFIdrive
Nota
Per ulteriori informazioni relative alle interfacce IF1 e IF2, vedere il capitolo "Funzionamento
in parallelo delle interfacce di comunicazione".
6.6.2
Classi di applicazioni
Descrizione
In base alle dimensioni e al tipo di processo applicativo esistono diverse classi di
applicazioni per PROFIdrive. PROFIdrive prevede complessivamente 6 classi di
applicazioni; 4 di queste sono illustrate in questa sezione.
Classe di applicazione 1 (azionamento standard)
Nel caso più semplice l'azionamento viene controllato con un valore di riferimento del
numero di giri per mezzo di PROFIBUS/PROFINET. La regolazione del numero di giri
completa viene eseguita nel regolatore di azionamento. Esempi pratici tipici sono i
convertitori di frequenza semplici per il controllo di pompe e ventilatori.
Figura 6-20
Classe di applicazione 1
Convertitori da incasso
220
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.6 Comunicazione secondo PROFIdrive
Classe di applicazione 2 (azionamento standard con funzione tecnologica)
Qui l'intero processo viene suddiviso in più parti di dimensioni minori e distribuito sugli
azionamenti. Le funzioni di automazione quindi non si trovano più esclusivamente
nell'apparecchio di automazione centrale ma sono anche distribuite nei regolatori
dell'azionamento.
La distribuzione presuppone naturalmente che la comunicazione sia possibile in tutte le
direzioni, quindi anche il traffico trasversale tra le funzioni tecnologiche dei singoli regolatori
dell'azionamento. Applicazioni concrete sono ad es. cascate di valore di riferimento,
avvolgitori e applicazioni di sincronismo del numero di giri nei processi costanti con un
convogliatore continuo.
Figura 6-21
Classe di applicazione 2
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
221
Comando
6.6 Comunicazione secondo PROFIdrive
Classe di applicazione 3 (funzionamento di posizionamento)
Oltre alla regolazione dell'azionamento, l'azionamento possiede un controllo di
posizionamento. L'azionamento funziona quindi come azionamento di posizionamento
autonomo, mentre i processi tecnologici sovraordinati si svolgono nel controllore. Mediante
PROFIBUS/PROFINET vengono trasmessi e avviati gli ordini di posizionamento al
regolatore di azionamento. Gli azionamenti di posizionamento hanno un campo di
applicazione molto ampio, ad es. l'apertura e la chiusura dei tappi nel processo di
riempimento di bottiglie o il posizionamento di coltelli in una macchina per il taglio di lamiere.
Figura 6-22
Classe di applicazione 3
Convertitori da incasso
222
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.6 Comunicazione secondo PROFIdrive
Classe di applicazione 4 (controllo centrale del movimento)
Questa classe di applicazione definisce l'interfaccia del valore di riferimento del numero di
giri con regolazione del numero di giri sull'azionamento e regolazione di posizione nel
controllore, come è richiesto nelle applicazioni di robotica e delle macchine utensili con
sequenze di movimento coordinate a più azionamenti.
Il controllo del movimento viene realizzato principalmente con un controllo numerico centrale
(CNC). Il circuito di regolazione della posizione viene chiuso tramite il bus. Per la
sincronizzazione dei clock della regolazione della posizione nel controllore e nel regolatore
negli azionamenti è necessaria una sincronizzazione di clock, come messa a disposizione
da PROFIBUS DP e PROFINET IO con IRT.
Figura 6-23
Classe di applicazione 4
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
223
Comando
6.6 Comunicazione secondo PROFIdrive
Selezione dei telegrammi a seconda della classe di applicazione
I telegrammi elencati in questa tabella possono essere utilizzati nelle seguenti classi di
applicazioni:
Tabella 6- 8
Telegramma
(p0922 = x)
Selezione dei telegrammi a seconda della classe di applicazione
Descrizione
Classe 1
Classe 2
Classe 3
Classe 4
1
Valore di riferimento del numero di giri 16 bit
x
x
2
Valore di riferimento del numero di giri 32 bit
x
x
3
Valore di riferimento del numero di giri 32 bit con 1 encoder
di posizione
4
Valore di riferimento del numero di giri 32 bit con 2 encoder
di posizione
x
5
Valore di riferimento del numero di giri 32 bit con 1
trasduttore di posizione e DSC
x
6
Valore di riferimento del numero di giri 32 bit con 2
trasduttore di posizione e DSC
x
7
Telegramma di posizionamento 7 (posizionatore semplice)
x
9
Telegramma di posizionamento 9 (posizionamento
semplice con impostazione diretta)
x
20
Valore di riferimento del numero di giri 16 bit VIK-NAMUR
81
Telegramma encoder, 1 canale encoder
x
82
Telegramma encoder esteso, 1 canale encoder + valore
attuale del numero di giri 16 bit
x
83
Telegramma encoder esteso, 1 canale encoder + valore
attuale del numero di giri 32 bit
x
102
Valore di riferimento del numero di giri 32 bit con 1
trasduttori di posizione e riduzione di coppia
x
103
Valore di riferimento del numero di giri 32 bit con 2 encoder
di posizione e riduzione di coppia
x
105
Valore di riferimento del numero di giri 32 bit con 1
trasduttori di posizione, riduzione di coppia e DSC
x
106
Valore di riferimento del numero di giri 32 bit con 2 encoder
di posizione, riduzione di coppia e DSC
x
110
Posizionatore semplice con MDI, override e XIST_A
x
111
Posizionatore semplice nel modo operativo MDI
x
116
Valore di riferimento del numero di giri 32 bit con 2 encoder
di posizione, riduzione di coppia e DSC, inoltre valori
attuali di Load,
Torque, Power e corrente
x
118
Valore di riferimento del numero di giri 32 bit con 2 encoder
di posizione esterni, riduzione di coppia e DSC, inoltre
valori attuali di Load, Torque, Power e corrente
x
125
DSC con precomando di coppia, 1 encoder di posizione
(encoder 1)
x
126
DSC con precomando di coppia, 2 encoder di posizione
(encoder 1 ed encoder 2)
x
x
x
x
x
Convertitori da incasso
224
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.6 Comunicazione secondo PROFIdrive
Telegramma
(p0922 = x)
Descrizione
Classe 1
Classe 2
Classe 3
Classe 4
136
136 DSC con precomando di coppia, 2 encoder di
posizione (encoder 1 ed encoder 2), 4 segnali Trace
x
139
Numero di giri/regolazione di posizione con DSC e
precomando di coppia, 1 encoder di posizione, stato
serraggio, valori attuali di stato
x
220
Valore di riferimento del numero di giri a 32 bit, settore
metallurgico
x
352
Valore di riferimento del numero di giri 16 bit, PCS7
x
x
370
Alimentatore
x
x
x
x
371
Alimentazione settore metallurgico
x
390
Control Unit con ingressi/uscite digitali
x
x
x
x
391
Control Unit con ingressi/uscite digitali e 2 tastatori di
misura
x
x
x
x
392
Control Unit con ingressi/uscite digitali e 6 tastatori di
misura
x
x
x
x
393
Control Unit con ingressi/uscite digitali e 8 tastatori di
misura
x
x
x
x
394
Control Unit con ingressi/uscite digitali
x
x
x
x
395
Control Unit con ingressi/uscite digitali e 16 tastatori di
misura
x
x
x
x
396
Telegramma per trasferire i dati di stato globali DU (DO
CU) per comandare gli I/O digitali su SOC-CU, nonché 8
canali per tastatore di misura CU e 8 programmatori a
camme CU
x
x
x
x
999
Telegrammi liberi
x
x
x
x
6.6.3
Comunicazione ciclica
Con la comunicazione ciclica vengono scambiati i dati di processo critici dal punto di vista
dei tempi (ad es. valori di riferimento e attuali).
6.6.3.1
Telegrammi e dati di processo
Informazioni generali
Selezionando un telegramma tramite il parametro CU p0922 si determinano i dati di
processo che devono essere trasmessi.
Dal punto di vista dell'apparecchio di azionamento i dati di processo ricevuti rappresentano
le parole di ricezione e i dati di processo da inviare, le parole di invio.
Le parole di ricezione e di invio sono costituite dai seguenti elementi :
• Parole di ricezione:
parole di comando e valori di riferimento
• Parole di invio:
parole di stato e valori attuali
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
225
Comando
6.6 Comunicazione secondo PROFIdrive
Preimpostazione "Profidrive"
Se si sceglie l'impostazione "Profidrive" nella selezione di comando e riferimento (vedere il
capitolo "Sorgenti di comando / Preimpostazione "Profidrive"), viene selezionato un
telegramma libero (p0922 = 999).
Il telegramma di ricezione viene parametrizzato nel seguente modo con la preimpostazione:
STW1
NSOLL_A
Il telegramma di invio è il seguente (impostazione di fabbrica):
ZSW1
NIST_GLATT
IAIST_GLATT
MIST_GLATT
PIST_GLATT
FAULT_CODE
Per utilizzare questi telegrammi non è necessario effettuare altre impostazioni.
Selezione di telegrammi definita dall'utente
a. Telegrammi standard
I telegrammi standard sono strutturati in base al profilo PROFIdrive o all'impostazione di
fabbrica. L'interconnessione interna dei dati di processo avviene automaticamente in base al
numero di telegramma impostato nel parametro p0922.
Tramite il parametro p0922 possono essere impostati i seguenti telegrammi standard:
• p0922 = 1
-> Valore di riferimento del numero di giri 16 bit
• p0922 = 2
-> Valore di riferimento del numero di giri a 32 bit
• p0922 = 3
-> Valore di riferimento del numero di giri a 32 bit con 1 encoder di
posizione
• p0922 = 4
-> Valore di riferimento del numero di giri a 32 bit con 2 encoder di
posizione
• p0922 = 20
-> Valore di riferimento del numero di giri a 16 bit VIK-NAMUR
• p0922 = 352
-> Valore di riferimento del numero di giri 16 bit PCS7
A seconda dell'impostazione in p0922 viene impostato automaticamente l'Interface Mode
della parola di comando e di stato:
● p0922 = 1, 352, 999:
STW 1/ZSW 1: Interface Mode SINAMICS / MICROMASTER, p2038 = 0
● p0922 = 20:
STW 1/ZSW 1: Interface Mode PROFIdrive VIK-NAMUR, p2038 = 2
b. Telegrammi specifici del costruttore
I telegrammi specifici del produttore sono strutturati secondo quanto deciso internamente
dall'azienda. L'interconnessione interna dei dati di processo avviene automaticamente in
base al numero di telegramma impostato.
Tramite il parametro p0922 possono essere impostati i seguenti telegrammi specifici del
costruttore:
• p0922 = 220
Valore di riferimento del numero di giri a 32 bit, settore metallurgico
Convertitori da incasso
226
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.6 Comunicazione secondo PROFIdrive
c. Telegrammi liberi (p0922 = 999)
Il telegramma di ricezione e invio può essere progettato liberamente con l'interconnessione
di parole di ricezione e invio tramite la tecnica BICO. Una preassegnazione dei dati di
processo effettuata come spiegato al punto a) viene mantenuta anche se si commuta p0922
= 999, ma può essere modificata o integrata in qualsiasi momento.
Per rispettare il profilo PROFIdrive occorre comunque mantenere la seguente assegnazione:
● Interconnessione della parola di ricezione PZD 1 come parola di comando 1 (STW 1)
● Interconnessione della parola di ricezione PZD 1 come parola di stato 1 (ZSW 1)
Per informazioni dettagliate sulle possibilità di interconnessione, vedere gli schemi logici
FP2460 e FP2470.
Avvertenze relative alle interconnessioni dei telegrammi
Modificando p0922 = 999 (impostazione di fabbrica) in p0922 ≠ 999, l'interconnessione dei
telegrammi viene eseguita automaticamente e bloccata.
Nota
Eccezioni
Costituiscono un'eccezione i telegrammi 20, 220 e 352. Qui i dati di processo selezionati
(PZD) possono essere interconnessi liberamente nel telegramma di invio o di ricezione, oltre
alle interconnessioni fisse.
Modificando p0922 ≠ 999 in p0922 = 999 l'interconnessione dei telegrammi precedente
viene mantenuta e può essere modificata.
Nota
Creazione agevolata di interconnessioni ampliate dei telegrammi
Se p0922 = 999, in p2079 può essere selezionato un telegramma. Viene effettuata e
bloccata automaticamente un'interconnessione dei telegrammi. Il telegramma può inoltre
essere ampliato.
Ciò può essere utilizzato per l'allestimento pratico di interconnessioni dei telegrammi
ampliate sulla base dei telegrammi esistenti.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
227
Comando
6.6 Comunicazione secondo PROFIdrive
6.6.3.2
Struttura dei telegrammi
Tabella 6- 9
Struttura dei telegrammi
Telegr.
PZD 1
PZD 2
1
STW1
NSOLL_A
ZSW1
NIST_A
2
3
4
20
220
352
999
PZD 3
PZD 4
PZD 5
PZD 6
PZD 7
PZD 8
PZD 9
PZD 10
STW1
NSOLL_B
STW2
ZSW1
NIST_B
ZSW2
STW1
NSOLL_B
STW2
G1_STW
ZSW1
NIST_B
ZSW2
G1_ZSW
STW1
NSOLL_B
STW2
G1_STW
ZSW1
NIST_B
ZSW2
G1_ZSW
MIST_
GLATT
PIST_
GLATT
MELD_
NAMUR
STW2_BM
M_ADD
M_LIM
Libero
Libero
Libero
Libero
ZSW2_
BM
Libero
Libero
Libero
STW1
NSOLL_A
ZSW1
NIST_A_
GLATT
STW1_
BM
IAIST_
GLATT
NSOLL_B
G1_XIST1
G1_XIST2
G2_STW
Ulteriore assegnazione, vedere FP2420
ZSW1_
BM
NIST_A
IAIST
MIST
WARN_
CODE
FAULT_
CODE
STW1
NSOLL_A
PCS7_3
PCS7_4
PCS7_5
PCS7_6
ZSW1
NIST_A_
GLATT
IAIST_
GLATT
MIST_
GLATT
WARN_
CODE
FAULT_
CODE
STW1
Libero
Libero
Libero
Libero
Libero
Libero
Libero
Libero
Libero
ZSW1
Libero
Libero
Libero
Libero
Libero
Libero
Libero
Libero
Libero
6.6.3.3
Panoramica delle parole di comando e dei valori di riferimento
Tabella 6- 10 Panoramica delle parole di comando e dei valori di riferimento
Abbreviazione
Descrizione
Parametri
Schema logico
STW1
Parola di comando 1 (Interface Mode
SINAMICS, p2038 = 0)
Vedere la tabella "Parola di comando 1
(Interface Mode SINAMICS, p2038 = 0)"
FP2442
STW1
Parola di comando 1 (Interface Mode VIKVedere la tabella "Parola di comando 1
NAMUR, p2038 = 2)
(Interface Mode VIK-NAMUR, p2038 = 2)"
FP2441
STW1_BM
Parola di comando 1 settore metallurgico
(Interface Mode SINAMICS, p2038 = 0)
Vedere la tabella "Parola di comando 1
settore metallurgico (Interface Mode
SINAMICS, p2038 = 0)"
FP2425
STW2
Parola di comando 2 (Interface Mode
SINAMICS, p2038 = 0)
Vedere la tabella "Parola di comando 2
(Interface Mode SINAMICS, p2038 = 0)"
FP2444
STW2_BM
Parola di comando 2 settore metallurgico
(Interface Mode SINAMICS, p2038 = 0)
Vedere la tabella "Parola di comando 2
settore metallurgico (Interface Mode
SINAMICS, p2038 = 0)"
FP2426
NSOLL_A
Valore di riferimento del numero di giri A
(16 bit)
p1070
FP3030
NSOLL_B
Valore di riferimento del numero di giri B
(32 bit)
p1155
FP3080
PCS7_x
Valori di riferimento specifici PCS7
Convertitori da incasso
228
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.6 Comunicazione secondo PROFIdrive
6.6.3.4
Panoramica delle parole di stato e dei valori attuali
Tabella 6- 11 Panoramica delle parole di stato e dei valori attuali
Abbreviazione
Descrizione
Parametri
Schema logico
ZSW1
Parola di stato 1 (Interface Mode
SINAMICS, p2038 = 0)
Vedere la tabella "Parola di stato 1
(Interface Mode SINAMICS, p2038 =
0)"
FP2452
ZSW1
Parola di stato 1 (Interface Mode VIKNAMUR, p2038 = 2)
Vedere la tabella "Parola di stato 1
(Interface Mode VIK-NAMUR, p2038 =
2)"
FP2451
ZSW1_BM
Parola di stato 1 settore metallurgico
(Interface Mode SINAMICS, p2038 = 0)
Vedere la tabella "Parola di stato 1
settore metallurgico (Interface Mode
SINAMICS, p2038 = 0)"
FP2428
ZSW2
Parola di stato 2 (Interface Mode
SINAMICS, p2038 = 0)
Vedere la tabella "Parola di stato 2
(Interface Mode SINAMICS, p2038 =
0)"
FP2454
ZSW2_BM
Parola di stato 2 settore metallurgico
(Interface Mode SINAMICS, p2038 = 0)
Vedere la tabella "Parola di stato 2
settore metallurgico (Interface Mode
SINAMICS, p2038 = 0)"
FP2429
NIST_A
Valore attuale del numero di giri A (16
bit)
r0063[0]
FP4715
NIST_B
Valore attuale del numero di giri B (32
bit)
r0063
FP4710
IAIST
Valore attuale di corrente
r0068[0]
FP6714
MIST
Valore attuale di coppia
r0080[0]
FP6714
PIST
Valore attuale di potenza
r0082[0]
FP6714
NIST_GLATT
Valore attuale del numero di giri livellato
r0063[1]
FP4715
IAIST_GLATT
Valore attuale di corrente livellato
r0068[1]
FP6714
MIST_GLATT
Valore attuale della coppia livellato
r0080[1]
FP6714
PIST_GLATT
Valore attuale di potenza livellato
r0082[1]
FP6714
MELD_NAMUR
VIK-NAMUR Barra bit di segnalazione
r3113, vedere la tabella "NAMUR Barra
bit di segnalazione"
--
WARN_CODE
Codice di avviso
r2132
FP8065
FAULT_CODE
Codice di errore
r2131
FP8060
6.6.4
Comunicazione aciclica
Contrariamente a quanto avviene nella comunicazione ciclica, la trasmissione dei dati nella
comunicazione aciclica avviene solo previa relativa richiesta (ad es. di lettura e scrittura di
parametri).
Per la comunicazione aciclica sono disponibili i servizi "Lettura set di dati" e "Scrittura set di
dati".
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
229
Comando
6.6 Comunicazione secondo PROFIdrive
Per la lettura e la scrittura di parametri esistono le seguenti possibilità:
● Protocollo S7
Questo protocollo viene usato ad es. dal tool di messa in servizio STARTER nel
funzionamento online tramite PROFIBUS.
● Canale parametri PROFIdrive con i seguenti set di dati:
– PROFIBUS: set di dati 47 (0x002F)
I servizi DPV1 sono disponibili per i master classe 1 e classe 2.
– PROFINET: set di dati 47 e 0xB02F come accesso globale, set di dati 0xB02E come
accesso locale
Nota
Bibliografia
Per una descrizione dettagliata della comunicazione aciclica, consultare la documentazione
seguente:
Bibliografia: PROFIdrive Profile V4.1, May 2006, Order No: 3.172
Indirizzamento:
• PROFIBUS DP, l'indirizzamento può avvenire tramite l'indirizzo logico o l'indirizzo di
diagnostica.
• PROFINET IO, l'indirizzamento avviene esclusivamente tramite un indirizzo di
diagnostica assegnato ad un modulo a partire dal posto connettore 1. L'accesso ai
parametri non è possibile tramite il posto connettore 0.
Figura 6-24
Lettura e scrittura di dati
Convertitori da incasso
230
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.6 Comunicazione secondo PROFIdrive
Proprietà del canale parametri
● Indirizzo a 16 bit per ogni numero di parametro e sub-indice
● Accesso simultaneo attraverso altri master PROFIBUS (master classe 2) o PROFINET
IO-Supervisor (ad es. tool di messa in servizio).
● Trasmissione di vari parametri in un accesso (job multiparametro).
● Trasmissione possibile di interi array o di un settore di un array.
● È sempre in corso l'elaborazione di un solo job parametri (nessun pipelining).
● Un job/una risposta parametri deve stare in un set di dati (max. 240 byte).
● L'header del job o della risposta fa parte dei dati utili.
6.6.4.1
Struttura dei job e delle risposte
Struttura del job parametri e della risposta parametri
Tabella 6- 12 Struttura del job parametri
Job parametri
Valori solo per Header del job
scrittura
1. Indirizzo parametro
Offset
Riferimento del job
Codice del job
0
Asse
Numero di parametri
2
Attributo
Numero di elementi
4
Numero parametro
6
Sottoindice
8
...
n. Indirizzo parametro
Attributo
Numero di elementi
Numero parametro
Sottoindice
1. Valore/i parametro/i
Formato
Numero di valori
Valori
...
...
n. valore/i parametro/i
Formato
Numero di valori
Valori
...
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
231
Comando
6.6 Comunicazione secondo PROFIdrive
Tabella 6- 13 Struttura della risposta parametri
Risposta parametri
Valori solo per
lettura
Offset
Header della risposta
Valori di errore 1. Valore/i parametro/i
solo per
risposta
negativa
Riferimento del job speculare
Codice di risposta
0
Asse speculare
Numero di parametri
2
Formato
Numero di valori
4
Valori o valori di errore
6
...
...
n. valore/i parametro/i
Formato
Numero di valori
Valori o valori di errore
...
Descrizione dei campi nel job parametri e nella risposta parametri
Tabella 6- 14 Campi per job e risposta parametri
Campo
Riferimento del job
Tipo di dati
Unsigned8
Valori
Nota
0x01 ... 0xFF
Identificazione univoca della coppia di job/risposta per il master. Il master modifica il
riferimento del job ad ogni nuovo job. Lo slave riproduce specularmente il riferimento del
job nella sua risposta.
Codice del job
Unsigned8
0x01
0x02
job di lettura
job di scrittura
Indica di quale job si tratta.
Nel job di scrittura le modifiche vengono effettuate nella memoria volatile (RAM). Per
copiare i dati modificati nella memoria non volatile occorre eseguire un salvataggio (p0971,
p0977).
Codice di risposta
Unsigned8
0x01
0x02
0x81
0x82
job di lettura (+)
job di scrittura (+)
job di lettura (-)
job di scrittura (-)
Riproduzione speculare del codice del job con le informazioni aggiuntive che indicano se
l'esecuzione del job ha avuto esito positivo o negativo.
Esito negativo significa che:
il job non è stato eseguito del tutto o in parte.
Invece dei valori per ogni risposta parziale vengono trasmessi i valori di errore.
Numero
oggetto di azionamento
Unsigned8
Numero di parametri
Unsigned8
0x00 ... 0xFF
Numero
Impostazione del numero dell'oggetto di azionamento per un dispositivo di azionamento
con più oggetti. Tramite lo stesso collegamento DPV1 è possibile accedere a diversi oggetti
di azionamento ognuno dei quali ha il proprio intervallo di numeri di parametro.
0x01 ... 0x27
Numero 1 … 39
limitato dalla lunghezza del
telegramma DPV1
In caso di job multiparametro definisce il numero dei seguenti intervalli di indirizzi di
parametri e/o valori di parametri.
Per job semplici il numero di parametri è = 1.
Convertitori da incasso
232
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.6 Comunicazione secondo PROFIdrive
Campo
Attributo
Tipo di dati
Unsigned8
Valori
0x10
0x20
0x30
Nota
Valore
Descrizione
Testo (non implementato)
Tipo di elemento di parametro a cui si accede.
Numero di elementi
Unsigned8
0x00
0x01 ... 0x75
Funzione speciale
Numero 1 ... 117
Limitato dalla lunghezza del
telegramma DPV1
Numero di elementi dell'array a cui si accede.
Numero parametro
Unsigned16
0x0001 ... 0xFFFF
Numero 1 ... 65535
Indirizza il parametro a cui si accede.
Sottoindice
Unsigned16
0x0000 ... 0xFFFF
Numero 0 ... 65535
Indirizza il primo elemento dell'array del parametro a cui si accede.
Formato
Unsigned8
0x02
0x03
0x04
0x05
0x06
0x07
0x08
Altri valori
Tipo di dati Integer8
Tipo di dati Integer16
Tipo di dati Integer32
Tipo di dati Unsigned8
Tipo di dati Unsigned16
Tipo di dati Unsigned32
Tipo di dati FloatingPoint
Vedere PROFIdrive Profile V3.1
0x40
Zero (senza valori come risposta
parziale positiva di un job di
scrittura)
0x41
0x42
0x43
0x44
Byte
Word
Double word
Error
Formato e numero specificano il posto occupato da valori nel telegramma.
Nel processo di scrittura è preferibile indicare tipi di dati conformi a PROFIdrive Profile. In
alternativa sono possibili anche byte, parola e doppia parola.
Numero di valori
Unsigned8
Valori di errore
Unsigned16
0x00 ... 0xEA
Numero 0 … 234
limitato dalla lunghezza del
telegramma DPV1
Indica il numero dei valori seguenti.
0x0000 ... 0x00FF
Significato dei valori di errore
→ vedere la tabella seguente
Valori di errore in caso di risposta negativa.
Se i valori sono costituiti da un numero dispari di byte, viene aggiunto un byte zero. In
questo modo viene garantita la struttura della parola del telegramma.
Valori
Unsigned16
0x0000 ... 0x00FF
I valori del parametro in caso di lettura o scrittura.
Se i valori sono costituiti da un numero dispari di byte, viene aggiunto un byte zero. In
questo modo viene garantita la struttura della parola del telegramma.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
233
Comando
6.6 Comunicazione secondo PROFIdrive
Valori di errore nelle risposte parametri
Tabella 6- 15 Valori di errore nelle risposte dei parametri DPV1
Valore
di
errore
Significato
Nota
Informazioni
aggiuntive
0x00
Numero di parametro non consentito. Accesso a un parametro non disponibile.
–
0x01
Valore di parametro non modificabile. Accesso per modifica di un parametro non modificabile.
Sottoindice
0x02
Superato il limite del valore minimo o
massimo.
Accesso per modifica con valore al di fuori dei limiti.
Sottoindice
0x03
Sottoindice errato.
Accesso a un sottoindice non disponibile.
Sottoindice
0x04
Nessun array.
Accesso con sottoindice a parametro non indicizzato.
–
0x05
Tipo di dati errato.
Accesso per modifica con valore non adatto al tipo di dati
del parametro.
–
0x06
Impostazione non consentita (solo
reset).
Accesso per modifica con il valore diverso da 0, dove
questo non è ammesso.
Sottoindice
0x07
Elemento descrittivo non
modificabile.
Accesso per modifica a elemento descrittivo non
modificabile.
Sottoindice
0x09
Dati descrittivi non presenti.
Accesso a descrizione non esistente (valore parametro
esistente).
–
0x0B
Nessuna priorità operativa.
Accesso per modifica in assenza di priorità operativa.
–
0x0F
Ness. array testo dispon.
Accesso ad array di testo non esistente (valore parametro
esistente).
–
0x11
Job non eseguibile a causa dello
stato operativo.
Accesso impossibile per motivi temporanei non meglio
specificati.
–
0x14
Valore non consentito.
Accesso per modifica con un valore che rientra nei limiti
dei valori, ma che non è ammesso per altri motivi
permanenti (parametro con valori singoli definiti).
Sottoindice
0x15
Risposta troppo lunga.
La lunghezza della risposta attuale supera la lunghezza
massima trasmissibile.
–
0x16
Indirizzo di parametro non consentito. Valore non consentito o non supportato per attributo,
numero di elementi, numero di parametro o sottoindice,
oppure per una combinazione di questi.
–
0x17
Formato non consentito.
Job di scrittura: Formato dei dati dei parametri non
consentito o non supportato.
–
0x18
Numero di valori inconsistente.
Job di scrittura: Il numero di valori dei dati dei parametri
non è adatto al numero di elementi nell'indirizzo dei
parametri.
–
0x19
L'oggetto di azionamento non esiste.
Accesso a un oggetto di azionamento non esistente.
–
0x65
Parametro temporaneamente
disattivato.
Accesso a un parametro che è presente ma che non
svolge alcuna funzione al momento dell'accesso (ad es.
regolazione n impostata e accesso a parametro del
controllo U/f).
–
0x6B
Parametro %s [%s]: Nessun accesso
in scrittura con regolatore abilitato.
–
–
0x6C
Parametro %s [%s]: Unità
sconosciuta.
–
–
Convertitori da incasso
234
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.6 Comunicazione secondo PROFIdrive
Valore
di
errore
Significato
Nota
Informazioni
aggiuntive
0x6D
Parametro %s [%s]: Accesso in
scrittura solo nello stato di messa in
servizio encoder (p0010 = 4).
–
–
0x6E
Parametro %s [%s]: Accesso in
scrittura solo nello stato di messa in
servizio motore (p0010 = 3).
–
–
0x6F
Parametro %s [%s]: Accesso in
–
scrittura solo nello stato di messa in
servizio parte di potenza (p0010 = 2).
–
0x70
Parametro %s [%s]: Accesso in
scrittura solo nella messa in servizio
rapida (p0010 = 1).
–
–
0x71
Parametro %s [%s]: Accesso in
scrittura solo nello stato di pronto
(p0010 = 0).
–
–
0x72
Parametro %s [%s]: Accesso in
–
scrittura solo nello stato di messa in
servizio reset parametri (p0010 = 30).
–
0x73
Parametro %s [%s]: Accesso in
scrittura solo nello stato di messa in
servizio Safety (p0010 = 95).
–
–
0x74
Parametro %s [%s]: Accesso in
scrittura solo nello stato di messa in
servizio applicazione/unità
tecnologica (p0010 = 5).
–
–
0x75
Parametro %s [%s]: Accesso in
scrittura solo nella messa in servizio
(p0010 diverso da 0).
–
–
0x76
Parametro %s [%s]: Accesso in
scrittura solo nello stato di messa in
servizio download (p0010 = 29).
–
–
0x77
Il parametro %s [%s] non può essere
scritto nel download
–
–
0x78
Parametro %s [%s]: Accesso in
scrittura solo nello stato di messa in
servizio configurazione
dell'azionamento (apparecchio:
p0009 = 3).
–
–
0x79
Parametro %s [%s]: Accesso in
scrittura solo nello stato di messa in
servizio determinazione tipo di
azionamento (apparecchio: p0009 =
2).
–
–
0x7A
Parametro %s [%s]: Accesso in
scrittura solo nello stato di messa in
servizio configurazione base set di
dati (apparecchio: p0009 = 4).
–
–
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
235
Comando
6.6 Comunicazione secondo PROFIdrive
Valore
di
errore
Significato
Nota
Informazioni
aggiuntive
0x7B
Parametro %s [%s]: Accesso in
–
scrittura solo nello stato di messa in
servizio configurazione
dell'apparecchio (apparecchio: p0009
= 1).
–
0x7C
Parametro %s [%s]: Accesso in
scrittura solo nello stato di messa in
servizio Download apparecchio
(apparecchio: p0009 = 29).
–
–
0x7D
Parametro %s [%s]: Accesso in
–
scrittura solo nello stato di messa in
servizio Reset parametri
dell'apparecchio (apparecchio: p0009
= 30).
–
0x7E
Parametro %s [%s]: Accesso in
scrittura solo nello stato di messa in
servizio Apparecchio pronto
(apparecchio: p0009 = 0).
–
–
0x7F
Parametro %s [%s]: Accesso in
scrittura solo nello stato di messa in
servizio apparecchio (apparecchio:
p0009 diverso da 0).
–
–
0x81
Il parametro %s [%s] non può essere
scritto nel download
–
–
0x82
L'assunzione della priorità di
comando è bloccata con BI:p0806.
–
–
0x83
Parametro %s [%s]:
Interconnessione BICO desiderata
impossibile.
L'uscita BICO non fornisce il valore Float ma l'ingresso
BICO richiede Float.
–
0x84
Parametro %s [%s]: Modifica
parametri bloccata
(vedere p0300, p0400, p0922)
–
–
0x85
Parametro %s [%s]: Nessun metodo
di accesso definito.
–
–
0xC8
Al di sotto del limite attualmente
valido.
Job di modifica su un valore che rientra nei limiti "assoluti", –
ma che si trova al di sotto del limite inferiore attualmente
valido.
0xC9
Al di sopra del limite attualmente
valido.
Job di modifica su un valore che rientra nei limiti "assoluti", –
ma che si trova al di sopra del limite superiore attualmente
valido (ad es. impostato mediante la potenza attuale del
convertitore).
0xCC
Accesso in scrittura non consentito.
Accesso in scrittura non consentito perché la chiave di
accesso non è disponibile.
–
Convertitori da incasso
236
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.6 Comunicazione secondo PROFIdrive
6.6.4.2
Determinazione del numero di oggetti di azionamento
Ulteriori informazioni sul sistema di azionamento (ad es. numeri degli oggetti di
azionamento) possono essere ricavate dai parametri p0101, r0102 e p0107/r0107 in questo
modo:
1. Tramite un job di lettura il valore del parametro r0102 "Numero oggetti di azionamento"
viene letto sull'oggetto di azionamento 1.
L'oggetto di azionamento con il numero 1 è la Control Unit (CU) che deve essere almeno
presente in ogni sistema di azionamento.
2. A seconda del risultato del primo job di lettura, tramite altri job di lettura vengono letti gli
indici del parametro p0101 "Numero oggetto di azionamento" sull'oggetto di azionamento
1 per il tempo impostato nel parametro r0102.
Esempio:
se il numero degli oggetti di azionamento viene letto con "5", vengono letti i valori degli
indici da 0 a 4 del parametro p0101. Gli indici rilevanti possono anche essere letti in una
sola volta. Gli indici rilevanti possono anche essere letti in una sola volta.
3. Al termine, per ogni oggetto di azionamento (identificato dal numero di oggetto di
azionamento) viene letto il parametro r0107/p0107 "Tipo oggetto di azionamento".
A seconda dell'oggetto di azionamento, il parametro 107 è un parametro di impostazione
o di supervisione.
Il valore nel parametro r0107/p0107 identifica il tipo di oggetto di azionamento. La
codifica del tipo di oggetto di azionamento può essere ricavata dalla lista dei parametri.
6.6.4.3
Esempio 1: Lettura di parametri
Presupposti
● Il controller PROFIdrive è stato messo in servizio ed è pienamente funzionante.
● La comunicazione PROFIdrive tra controller e device è funzionante.
● Il controller può leggere e scrivere set di dati secondo PROFINET/PROFIBUS.
Descrizione del job
Dopo la comparsa di almeno un'anomalia (ZSW1.3 = "1") sull'azionamento 2 (anche numero
dell'oggetto di azionamento 2), i codici di anomalia in r0945[0] ... r0945[7] devono essere letti
dal buffer anomalie.
Il job deve essere eseguito con un blocco dati di job e risposte.
Procedura generale
1. Creare il job per la lettura dei parametri.
2. Avviare il job.
3. Valutare la risposta.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
237
Comando
6.6 Comunicazione secondo PROFIdrive
Creare il job
Tabella 6- 16 Job parametri
Job parametri
Header del job
Indirizzo parametro
Offset
Riferimento del job = 25 hex
Codice del job = 01 hex
0+1
Asse = 02 hex
Numero di parametri = 01hex
2+3
Attributo = 10 hex
Numero di elementi = 08 hex
4+5
Numero parametro = 945 dec
6
Sottoindice = 0 dec
8
Note relative al job parametri:
● Riferimento del job:
Il valore è scelto arbitrariamente nell'intervallo dei valori valido. Il riferimento del job
imposta il job e la risposta in relazione.
● Codice del job:
01 hex → Questo codice è necessario per un job di lettura.
● Asse:
02 hex → Azionamento 2, buffer anomalie con anomalie specifiche dell'azionamento e
dell'apparecchio
● Numero di parametri:
01 hex → Viene letto un parametro.
● Attributo:
10 hex → Vengono letti i valori del parametro.
● Numero di elementi:
08 hex → Deve essere letto il caso di anomalia attuale con 8 anomalie.
● Numero di parametro:
945 dec → Viene letto p0945 (codice anomalia).
● Sottoindice:
0 dec → Viene letto a partire dall'indice 0.
2. Avviare l'esportazione
Avviare il job
Quando ZSW1.3 = "1" → avviare il job parametri
Convertitori da incasso
238
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.6 Comunicazione secondo PROFIdrive
Valutare la risposta
Tabella 6- 17 Risposta parametri
Risposta parametri
Header della
risposta
Valore parametro
Offset
Riferimento del job speculare = 25
hex
Codice della risposta = 01 hex
0+1
Asse speculare = 02 hex
Numero di parametri = 01hex
2+3
Formato = 06 hex
Numero di valori = 08 hex
4+5
1. Valore = 1355 dec
6
2. Valore = 0 dec
8
...
...
8. Valore = 0 dec
20
Note relative alla risposta parametri:
● Riferimento del job speculare:
Questa risposta fa parte del job con riferimento 25.
● Codice di risposta:
01 hex → Job di lettura positivo, i valori si trovano dal 1° valore
● Asse speculare, numero di parametri:
I valori corrispondono a quelli del job.
● Formato:
06 hex → I valori del parametro sono nel formato Unsigned16.
● Numero di valori:
08 hex → Esistono 8 valori di parametri.
● 1. Valore ... 8° valore:
Nel buffer anomalie dell'azionamento 2 è registrata un'anomalia solo nel 1° valore.
6.6.4.4
Esempio 2: scrittura di parametri (job multiparametro)
Presupposti
● Il controller PROFIdrive è stato messo in servizio ed è pienamente funzionante.
● La comunicazione PROFIdrive tra controller e device è funzionante.
● Il controller può leggere e scrivere set di dati secondo PROFINET/PROFIBUS.
Presupposto specifico per questo esempio:
● Tipo di regolazione: regolazione vettoriale (con canale del valore di riferimento esteso)
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
239
Comando
6.6 Comunicazione secondo PROFIdrive
Descrizione del job
Deve essere impostato il funzionamento a impulsi 1 e 2 mediante morsetti di ingresso della
Control Unit per l'azionamento 2 (anche numero dell'oggetto di azionamento 2). A questo
scopo i parametri corrispondenti devono essere scritti nel seguente modo tramite un job
parametri:
• BI: p1055 = r0722.4
Jog bit 0
• BI: p1056 = r0722.5
Jog bit 1
• p1058 = 300 1/min
JOG 1 Valore di riferimento della velocità
• p1059 = 600 1/min
JOG 2 Valore di riferimento della velocità
Il job deve essere eseguito con un blocco dati di job e risposte.
Figura 6-25
Impostazione del task per job multiparametro (esempio)
Procedura generale
1. Creare il job per la scrittura dei parametri.
2. Avviare il job.
3. Valutare la risposta.
Convertitori da incasso
240
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.6 Comunicazione secondo PROFIdrive
Creare il job
Tabella 6- 18 Job parametri
Job parametri
Header del job
1. Indirizzo
parametro
Offset
Riferimento del job = 40 hex
Codice del job = 02 hex
0+1
Asse = 02 hex
Numero di parametri = 04 hex
2+3
Attributo = 10 hex
Numero elementi = 01 hex
4+5
Numero parametro = 1055 dec
6
Sottoindice = 0 dec
2. Indirizzo
parametro
Attributo = 10 hex
8
Numero elementi = 01 hex
10 + 11
Numero parametro = 1056 dec
12
Sottoindice = 0 dec
3. Indirizzo
parametro
Attributo = 10 hex
14
Numero elementi = 01 hex
16 + 17
Numero parametro = 1058 dec
18
Sottoindice = 0 dec
4. Indirizzo
parametro
1. Valore/i
parametro/i
2. Valore/i
parametro/i
3. Valore/i
parametro/i
4. Valore/i
parametro/i
Attributo = 10 hex
20
Numero elementi = 01 hex
22 + 23
Numero parametro = 1059 dec
24
Sottoindice = 0 dec
26
Formato = 07 hex
Numero di valori = 01 hex
28 + 29
Valore = 02D2 hex
30
Valore = 0404 hex
32
Formato = 07 hex
Numero di valori = 01 hex
34 + 35
Valore = 02D2 hex
36
Valore = 0405 hex
38
Formato = 08 hex
Numero di valori = 01 hex
40 + 41
Valore = 4396 hex
42
Valore = 0000 hex
44
Formato = 08 hex
Numero di valori = 01 hex
46 + 47
Valore = 4416 hex
48
Valore = 0000 hex
50
Note relative al job parametri:
● Riferimento del job:
Il valore è scelto arbitrariamente nell'intervallo dei valori valido. Il riferimento del job
imposta il job e la risposta in relazione.
● Codice del job:
02 hex → Questo codice è necessario per un job di scrittura.
● Asse:
02 hex → I parametri vengono scritti nell'azionamento 2.
● Numero di parametri:
04 hex → Il job multiparametro comprende 4 singoli job parametri.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
241
Comando
6.6 Comunicazione secondo PROFIdrive
1º Indirizzo parametro ... 4º indirizzo parametro
● Attributo:
10 hex → Vengono scritti i valori del parametro.
● Numero di elementi:
01 hex → Viene letto 1 elemento dell'array.
● Numero di parametro:
Indicazione del numero del parametro da descrivere (p1055, p1056, p1058, p1059).
● Sottoindice:
0 dec → Identificazione del primo elemento dell'array.
1º valore parametro ... 4º valore parametro
● Formato:
07 hex → Tipo di dati Unsigned32
08 hex → Tipo di dati FloatingPoint
● Numero di valori:
01 hex → Ogni parametro viene scritto con un valore nel formato specificato.
● Valore:
parametro di ingresso BICO: Immettere la sorgente del segnale
Parametri di impostazione: immettere il valore
Avviare il job
Valutare la risposta
Tabella 6- 19 Risposta parametri
Risposta parametri
Header della
risposta
Offset
Riferimento del job speculare = 40
hex
Codice di risposta = 02 hex
0
Asse speculare = 02 hex
Numero di parametri = 04 hex
2
Note relative alla risposta parametri:
● Riferimento del job speculare:
Questa risposta fa parte del job con riferimento 40.
● Codice del job:
02 hex → Job di scrittura positivo
● Asse speculare:
02 hex → Il valore corrisponde al valore del job.
● Numero di parametri:
04 hex → Il valore corrisponde al valore del job.
Convertitori da incasso
242
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.7 Comunicazione mediante PROFIBUS DP
6.6.5
Ulteriori informazioni sulla comunicazione secondo PROFIdrive
Ulteriori informazioni sulla comunicazione secondo PROFIdrive
Per ulteriori informazioni sulla comunicazione secondo PROFIdrive, vedere il documento
allegato "Manuale di guida alle funzioni SINAMICS S120", sezione "Comunicazione via
PROFIdrive ".
6.7
Comunicazione mediante PROFIBUS DP
6.7.1
Collegamento Profibus
Per informazioni sul collegamento PROFIBUS, consultare il capitolo "Installazione elettrica".
6.7.2
Controllo tramite PROFIBUS
LED di diagnostica "COM (PROFIdrive)"
Il LED di diagnostica per PROFIBUS si trova sul lato frontale dell'unità di regolazione. Il
relativo significato si ricava dalla tabella seguente.
Tabella 6- 20 Descrizione dei LED "COM"
Colore
Stato
-----
Spento
Verde
Luce fissa
Descrizione
La comunicazione ciclica non è (ancora) avvenuta.
Nota:
PROFIdrive è pronto per la comunicazione quando la Control Unit è pronta per il
funzionamento (vedere LED RDY).
La comunicazione ciclica è in corso.
Verde
Lampeggio 0,5 Hz La comunicazione ciclica non avviene ancora in modo completo.
Cause possibili:
- Il controller non trasmette valori di riferimento.
- Nel funzionamento con sincronizzazione di clock il controller non trasmette alcun
Global Control (GC) o ne trasmette uno errato.
Rosso
Lampeggio 0,5 Hz Il master PROFIBUS invia una parametrizzazione / configurazione errata
Rosso
Lampeggio 2 Hz
La comunicazione ciclica del bus è stata interrotta o non è stata stabilita.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
243
Comando
6.7 Comunicazione mediante PROFIBUS DP
Impostazione del PROFIBUS Ident Number
Il PROFIBUS Ident Number (PNO-ID) può essere impostato tramite p2042.
SINAMICS può funzionare su PROFIBUS con varie identità. Ciò consente di utilizzare un
PROFIBUS GSD indipendente dall'apparecchio (ad es. PROFIdrive VIK-NAMUR con Ident
Number 3AA0 hex).
● 0: SINAMICS S/G
● 1: VIK-NAMUR
Una nuova impostazione diventa attiva solo dopo POWER ON, reset o download.
Nota
Totally Integrated Automation
I vantaggi della Totally Integrated Automation (TIA) possono essere sfruttati solo
selezionando "0".
6.7.3
Sorveglianza anomalia telegramma
Descrizione
Nella sorveglianza degli errori del telegramma si distinguono due casi:
● Errore del telegramma in caso di interruzione del bus
In caso di anomalia di un telegramma e dopo che è trascorso il tempo di sorveglianza
aggiuntivo (p2047), il bit r2043.0 viene impostato a "1" e viene emesso l'avviso A01920.
L'uscita del binettore r2043.0 può essere utilizzata ad es. per un arresto rapido.
Una volta trascorso il tempo di ritardo anomalia (p2044), viene emessa l'anomalia
F01910.
L'anomalia F01910 provoca la reazione OFF2 (blocco impulsi) nell'alimentatore e la
reazione OFF3 (arresto rapido) nell'azionamento.
Se non deve essere eseguita nessuna reazione OFF è possibile modificare la
parametrizzazione della reazione su anomalia.
L'anomalia F01910 può essere subito tacitata. L'azionamento può funzionare anche
senza PROFIBUS.
Figura 6-26
Sorveglianza di errore del telegramma in caso di interruzione del bus
Convertitori da incasso
244
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.7 Comunicazione mediante PROFIBUS DP
● Errore telegramma in caso di stop della CPU
Dopo un errore del telegramma, il bit r2043.0 viene impostato a "1". L'uscita del binettore
r2043.0 può essere utilizzata ad es. per un arresto rapido.
Una volta trascorso il tempo di ritardo anomalia (p2044), viene emessa l'anomalia
F01910.
L'anomalia F01910 provoca la reazione OFF2 (blocco impulsi) nell'alimentatore e la
reazione OFF3 (arresto rapido) nell'azionamento.
Se non deve essere eseguita nessuna reazione OFF è possibile modificare la
parametrizzazione della reazione su anomalia.
L'anomalia F01910 può essere subito tacitata. L'azionamento può funzionare anche
senza PROFIBUS.
Figura 6-27
6.7.4
Sorveglianza interruzione telegramma in caso di stop della CPU
Ulteriori informazioni sulla comunicazione tramite PROFIBUS DP
Ulteriori informazioni sulla comunicazione tramite PROFIBUS DP
Per ulteriori informazioni sulla comunicazione tramite PROFIBUS DP, vedere il documento
allegato "Manuale di guida alle funzioni SINAMICS S120", sezione "Comunicazione
mediante PROFIBUS DP".
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
245
Comando
6.8 Comunicazione tramite PROFINET IO
6.8
Comunicazione tramite PROFINET IO
6.8.1
Communication Board Ethernet CBE20
Descrizione
La Communication Board CBE20 deve essere innestata nell'Option Slot della Control Unit.
Quest'unità dispone di 4 interfacce Ethernet; la diagnostica dello stato operativo e della
comunicazione è segnalata tramite LED.
Panoramica delle interfacce
Figura 6-28
Communication Board Ethernet CBE20
Indirizzo MAC
L'indirizzo MAC delle interfacce Ethernet è riportato sul lato superiore del CBE20. La
targhetta è visibile solo quando l'unità non è ancora stata montata.
Nota
Prima di montare il modulo, annotare l'indirizzo MAC, cosicché risulti disponibile alla
successiva messa in servizio.
Convertitori da incasso
246
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.8 Comunicazione tramite PROFINET IO
Interfaccia Ethernet X1400
Tabella 6- 21 Connettore X1400, porta 1 - 4
Pin
Nome del segnale
Dati tecnici
1
RX+
Dati di ricezione +
2
RX-
Dati di ricezione -
3
TX+
Dati di invio +
4
---
riservato, lasciare libero
5
---
riservato, lasciare libero
6
TX-
Dati di invio -
7
---
riservato, lasciare libero
8
---
riservato, lasciare libero
Collare dello schermo
M_EXT
Schermo fisso
Montaggio
ATTENZIONE
Danneggiamento o anomalia funzionale delle Option Board a causa di rimozione e
inserimento a caldo
In caso di rimozione e inserimento delle Option Board durante il funzionamento, le stesse
potrebbero subire dei danni o non funzionare correttamente.
• Estrarre e inserire le Option Board solo quando la Control Unit non è sotto tensione.
Figura 6-29
Montaggio CBE20
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
247
Comando
6.8 Comunicazione tramite PROFINET IO
6.8.2
Attivazione del funzionamento online: STARTER tramite PROFINET IO
Descrizione
Il funzionamento online con PROFINET IO viene realizzato tramite TCP/IP.
Presupposti
● STARTER a partire della versione 4.2 o successiva
● Control Unit CU320-2 PN o CBE20
STARTER tramite PROFINET IO (esempio)
Figura 6-30
STARTER tramite PROFINET (esempio)
Procedura di attivazione del funzionamento online tramite PROFINET
1. Impostazione dell'indirizzo IP in Windows XP
Qui viene assegnato un indirizzo IP libero e fisso al PC/PG.
2. Impostazioni in STARTER
3. Assegnazione dell'indirizzo IP e del nome
Affinché STARTER possa creare una comunicazione, è necessario attribuire un nome
all'interfaccia PROFINET.
4. Selezionare il funzionamento online in STARTER.
Convertitori da incasso
248
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.8 Comunicazione tramite PROFINET IO
Impostazione dell'indirizzo IP in Windows XP
Nel desktop fare clic con il tasto destro del mouse su "Risorse di rete"-> Proprietà -> Fare
doppio clic sulla scheda di rete -> Proprietà -> selezionare "Internet Protocol (TCP/IP)" ->
Proprietà -> Specificare gli indirizzi liberamente assegnabili.
Figura 6-31
Proprietà di Internet Protocol (TCP/IP)
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
249
Comando
6.8 Comunicazione tramite PROFINET IO
Impostazioni in STARTER
In STARTER la comunicazione tramite PROFINET deve essere impostata come segue:
● Strumenti -> Imposta interfaccia PG/PC...
Figura 6-32
Impostazione dell'interfaccia PG/PC
● Fare clic con il pulsante destro del mouse sull'apparecchio di azionamento ->
Apparecchio di destinazione -> Accesso online -> Indirizzo unità
Figura 6-33
Attivazione dell'accesso online
Convertitori da incasso
250
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.8 Comunicazione tramite PROFINET IO
Assegnazione dell'indirizzo IP e del nome
Nota
Assegnazioni dei nomi ai dispositivi
Per l'assegnazione del nome nel caso dei dispositivi IO in PROFINET (componenti di
SINAMICS) devono essere rispettate le convenzioni ST (Structured Text). I nomi devono
essere univoci nell'ambito della rete PROFINET.
Nel nome di un dispositivo IO non sono consentiti i caratteri "-" e ".".
Funzione "Nodi/partner raggiungibili"
Con STARTER è possibile assegnare all'interfaccia PROFINET un indirizzo IP e un nome.
● Installare un cavo diretto Ethernet dal PG/PC all'interfaccia PROFINET.
● Accendere la Control Unit.
● Avviare STARTER.
● Tramite Progetto -> Nodi accessibili o il pulsante "Nodi accessibili" vengono ricercati tutti i
nodi disponibili in PROFINET.
● L'oggetto di azionamento SINAMICS viene riconosciuto e visualizzato come nodo di bus
con indirizzo IP 0.0.0.0 e senza nome.
● Selezionare la voce corrispondente al componente di bus e con il pulsante destro del
mouse selezionare la voce di menu visualizzata "Elaborazione utenti Ethernet".
● Nella maschera che appare "Elaborazione utenti Ethernet" inserire il nome del dispositivo
per l'interfaccia PROFINET e fare clic sul pulsante "Assegna nome". Nella configurazione
IP inserire l'indirizzo corrispondente (ad es. 169.254.11.22) e specificare la maschera di
sottorete (ad es. 255.255.0.0). Quindi fare clic sul pulsante "Assegna configurazione IP".
Chiudere la maschera.
● Selezionando il pulsante "Aggiorna (F5)" l'indirizzo IP e il nome vengono visualizzati in
corrispondenza della voce del componente del bus. In caso contrario, chiudere la
maschera "Nodi/partner raggiungibili" e ripetere la ricerca dei nodi accessibili.
● Se l'interfaccia PROFINET viene visualizzata come componente di bus, selezionare la
voce e fare clic sul pulsante "Conferma".
● L'azionamento SINAMICS con viene visualizzato come oggetto di azionamento nella
struttura gerarchica del progetto.
● È possibile effettuare altre configurazioni per l'oggetto di azionamento.
● Fare clic sul pulsante "Collega al sistema di destinazione" e caricare il progetto nella
scheda di memoria della Control Unit selezionando Sistema di destinazione -> Carica ->
nell'apparecchio di destinazione .
Nota
Percorso di memorizzazione dell'indirizzo IP
L'indirizzo IP e il nome dell'apparecchio vengono salvati in modo non volatile sulla scheda
di memoria della Control Unit.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
251
Comando
6.8 Comunicazione tramite PROFINET IO
6.8.3
Generalità su PROFINET IO
6.8.3.1
Informazioni generali su PROFINET IO in SINAMICS
Informazioni generali
PROFINET IO è uno standard Industrial Ethernet aperto con un vasto campo di applicazione
nell'automazione della produzione e dei processi. PROFINET IO si basa su Industrial
Ethernet e utilizza il protocollo TCP/IP e gli standard IT.
Nelle reti industriali è importante l'elaborazione dei segnali in tempo reale ed in modo
deterministico. PROFINET IO soddisfa questi requisiti.
L'indipendenza dai costruttori e l'apertura sono garantite dalla norma internazionale IEC
61158.
PROFINET IO è ottimizzato per il trasferimento veloce di dati al livello di campo.
PROFINET IO
Nell'ambito della Totally Integrated Automation (TIA), PROFINET IO rappresenta il
proseguimento naturale di:
● PROFIBUS DP, il bus di campo ormai consolidato, e
● Industrial Ethernet, il bus di comunicazione per il livello di cella.
Le esperienze maturate in entrambi i sistemi sono state integrate in PROFINET IO.
PROFINET IO è uno standard di automazione basato su Ethernet dell'organizzazione
PROFIBUS International (organizzazione utenti PROFIBUS e. V.) che definisce un modello
di comunicazione ed engineering esteso a tutti i produttori.
PROFINET IO descrive lo scambio dati globale tra gli IO-Controller (dispositivi con la
suddetta "Funzionalità master") e gli IO-Device (dispositivi con la suddetta "Funzionalità
slave") ed inoltre la parametrizzazione e la diagnostica. La progettazione di un sistema
PROFINET IO è pressoché identico a quello PROFIBUS.
I sistemi PROFINET IO sono costituiti dai seguenti dispositivi:
● Un IO Controller è un controllore che gestisce dei task di automazione.
● Un IO Device è un dispositivo che viene comandato e controllato da un IO Controller. Un
IO-Device può essere costituito da diversi moduli o sottomoduli.
● Un IO Supervisor è un tool di engineering generalmente basato su un PC per la
parametrizzazione e la diagnostica dei singoli IO Device (apparecchi di azionamento).
Convertitori da incasso
252
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.8 Comunicazione tramite PROFINET IO
IO-Device: apparecchi di azionamento con interfaccia PROFINET
● SINAMICS G130 con CU320-2 DP e CBE20 inserita
● SINAMICS G130 con CU320-2 PN
Con SINAMICS G130 e CBE20 o CU320-2 PN la comunicazione può avvenire tramite
PROFINET IO con RT.
Nota
CU320-2 DP e CBE20 inserita
Con la CU320-2 DP e la scheda CBE20 inserita, il canale ciclico PZD per PROFIBUS DP è
inizialmente disattivato. È tuttavia possibile una riattivazione tramite il parametro p8839 = 1
(vedere il capitolo "Funzionamento parallelo di interfacce di comunicazione").
Bibliografia
Nota
Bibliografia
PROFINET per la tecnica di azionamento è standardizzato e definito nella seguente
documentazione:
PROFIBUS-Profile PROFIdrive – Profile Drive Technology
Version V4.1, May 2006,
PROFIBUS User Organization e. V.
Haid-und-Neu-Straße 7,
D-76131 Karlsruhe
http://www.profibus.com,
Order Number 3.172, spec. Cap. 6
• IEC 61800-7
6.8.3.2
Comunicazione in tempo reale (RT) e comunicazione in tempo reale isocrona (IRT)
Comunicazione in tempo reale
Nella comunicazione tramite TCP/IP si possono verificare tempi ciclo troppo lunghi e non
definiti per i requisiti dell'automazione di produzione. Per la comunicazione di dati utili IO con
criticità temporale, PROFINET non utilizza perciò il protocollo TCP/IP ma un proprio canale
in tempo reale.
Real-Time significa che un sistema elabora gli eventi esterni in un tempo definito.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
253
Comando
6.8 Comunicazione tramite PROFINET IO
Determinismo
Determinismo significa che un sistema reagisce in modo predittivo (deterministico).
PROFINET IO con IRT consente una determinazione (previsione) precisa degli istanti di
trasmissione.
PROFINET IO con RT (Real-Time)
I dati Real Time vengono gestiti con una priorità superiore rispetto a quelli TCP(UDP)/IP. la
trasmissione di dati con criticità temporale ha luogo a intervalli di tempo garantiti. La
comunicazione RT rappresenta la base per lo scambio dei dati in PROFINET IO.
PROFINET IO con IRT (Isochronous Real-Time)
Isochronous Real Time: Proprietà Real Time di PROFINET IO, con la quale i telegrammi IRT
vengono trasferiti in modo deterministico tramite vie di comunicazione pianificate in una
sequenza definita per ottenere sincronizzazione e performance ai massimi livelli tra IO
Controller e IO Device (azionamenti). La proprietà IRT viene definita anche comunicazione
pianificata temporalmente; in essa si utilizzano le conoscenze della struttura di rete
(topologia). Per IRT sono necessari speciali componenti di rete in grado di supportare una
trasmissione di dati pianificata.
Applicando questo metodo di trasmissione si ottengono tempi di ciclo SINAMICS di min.
250 μs(onboard)/500 μs (CBE20) e una precisione di jitter inferiore a 1 μs.
Figura 6-34
6.8.3.3
Distribuzione/prenotazione delle larghezze di banda PROFINET IO
Indirizzi
Indirizzo MAC
A ogni interfaccia Ethernet e PROFINET viene assegnato in fabbrica un identificativo
univoco internazionale. Questo identificativo di 6 byte è l'indirizzo MAC. L'indirizzo MAC è
suddiviso in:
● 3 byte per il codice del costruttore
● 3 byte per l'identificativo del dispositivo (numero progressivo).
L'indirizzo MAC si trova su una label (CBE20) o sulla targhetta dei dati tecnici (CU320-2 PN),
ad es.: 08-00-06-6B-80-C0.
Convertitori da incasso
254
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.8 Comunicazione tramite PROFINET IO
La Control Unit CU320-2 PN è dotata di due interfacce onboard:
● Un'interfaccia Ethernet
● Un'interfaccia PROFINET con due porte
L'indirizzo MAC delle interfacce Ethernet e PROFINET si trova sulla targhetta dei dati tecnici.
Indirizzo IP
Per effettuare il collegamento e la parametrizzazione è necessario il protocollo TCP/IP. Per
poter essere indirizzato come nodo della rete Industrial Ethernet, un dispositivo PROFINET
deve avere un indirizzo IP univoco all'interno della rete. L'indirizzo IP è costituito da 4 numeri
decimali con un campo di valori da 0 a 255. I numeri decimali sono separati da un punto.
L'indirizzo IP è formato da:
● Indirizzo del nodo (definito anche host o nodo di rete)
● Indirizzo della (sotto)rete
Assegnazione dell'indirizzo IP
Gli indirizzi IP dei device IO possono essere assegnati attraverso l'IO Controller e hanno
sempre la stessa maschera di sottorete dell'IO Controller. In questo caso l'indirizzo IP non
viene memorizzato permanentemente. Dopo POWER ON/OFF la registrazione dell'indirizzo
IP viene persa. L'indirizzo IP può essere assegnato tramite la funzione STARTER
"Nodi/partner raggiungibili" in modo non volatile.
Questa funzione può essere eseguita anche con Config HW di STEP 7. Qui la funzione è
denominata "Elaborazione nodi Ethernet".
Nota
Indirizzi IP delle interfacce onboard
La fascia di indirizzi IP dell'interfaccia Ethernet e dell'interfaccia PROFINET non devono
essere uguali. L'impostazione di fabbrica dell'indirizzo IP dell'interfaccia Ethernet X127 è
169.254.11.22, per la maschera di sottorete è 255.255.0.0.
Nota
Parte di una rete aziendale
Se la rete fa parte di una rete aziendale Ethernet, occorre richiedere questi dati (indirizzo IP)
all'amministratore di rete.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
255
Comando
6.8 Comunicazione tramite PROFINET IO
Nome del dispositivo (NameOfStation)
All'atto della fornitura gli IO Device non hanno un nome dell'apparecchio. Solo dopo aver
assegnato un nome dell'apparecchio con l'IO Supervisor, un IO è indirizzabile da parte di un
IO Controller, ad es. per il trasferimento dei dati di progettazione (fra l'altro l'indirizzo IP)
all'avviamento o per lo scambio dei dati utili in funzionamento ciclico.
Nota
Salvataggio del nome del dispositivo nella memoria non volatile
Il nome del dispositivo deve essere salvato in modo non volatile con STARTER o con Config
HW di STEP 7.
Nota
Dati di indirizzamento per le porte
I dati degli indirizzi per le porte PROFINET interne X150 P1 e P2 possono essere immessi in
STARTER nella Lista esperti con l'ausilio dei parametri p8920, p8921, p8922 e p8923.
I dati degli indirizzi per le porte della CBE20 possono essere immessi in STARTER nella
Lista esperti con l'ausilio dei parametri p8940, p8941, p8942 e p8943.
Sostituzione della Control Unit (IO Device)
Se l'indirizzo IP e il nome del dispositivo sono stati salvati nella memoria non volatile, anche
questi dati vengono inoltrati con la scheda di memoria della Control Unit. In caso di errore
nel dispositivo PROFINET, la scheda di memoria consente di sostituire una unità senza
ricorrere a IO-Supervisor.
Se in caso di guasto di un dispositivo o modulo si deve sostituire completamente una Control
Unit, la nuova Control Unit esegue automaticamente una parametrizzazione ed una
configurazione in base ai dati presenti sulla scheda di memoria. Quindi viene ripristinato lo
scambio ciclico dei dati utili.
6.8.3.4
Trasmissione dati
Caratteristiche
L'interfaccia PROFINET di un dispositivo di azionamento supporta il funzionamento
contemporaneo di:
● IRT – realtime Ethernet isocrona
● RT - realtime Ethernet
● Servizi Ethernet standard (TCP/IP, LLDP, UDP e DCP)
Convertitori da incasso
256
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.8 Comunicazione tramite PROFINET IO
Telegramma PROFIdrive per la trasmissione ciclica di dati ed i servizi aciclici
Per ogni oggetto di azionamento di un dispositivo di azionamento con scambio di dati di
processo ciclico esistono telegrammi per l'invio e la ricezione di dati di processo.
Oltre allo scambio dati ciclico possono essere utilizzati servizi aciclici per parametrizzare e
configurare l'azionamento. Questi servizi aciclici possono essere utilizzati dall'IO Supervisor
o dall'IO Controller.
Sequenza degli oggetti di azionamento nel telegramma
La sequenza degli oggetti di azionamento nel telegramma sul lato dell'azionamento viene
visualizzata con una lista in p0978[0...24] e può anche essere modificata.
Con il tool di messa in servizio STARTER è possibile visualizzare la sequenza degli oggetti
di azionamento di un sistema di azionamento messo in servizio selezionando "Apparecchio
di azionamento" > "Comunicazione" > "Configurazione telegramma" in modalità online.
Nella creazione della configurazione sul lato controller (ad es. Config HW) gli oggetti di
azionamento previsti dall'applicazione per lo scambio di dati di processo vengono inseriti nel
telegramma in questa sequenza.
Nota
Sequenza degli oggetti di azionamento
La sequenza degli oggetti di azionamento nella configurazione HW deve coincidere con la
sequenza nell'azionamento (p0978).
Gli oggetti di azionamento dopo il primo zero in p0978 non possono essere progettati in
Config HW.
La struttura dei telegrammi dipende dagli oggetti di azionamento previsti nella
configurazione. Sono consentite le configurazioni che non prevedono tutti gli oggetti di
azionamento presenti nel sistema di azionamento.
6.8.3.5
Canali di comunicazione
Canali di collegamento PROFINET
● Una Control Unit dispone di un'interfaccia Ethernet integrata (X127).
● La Control Unit CU320-2 PN dispone di un'interfaccia PROFINET (X150) con due porte
onboard: P1 e P2
● Una Control Unit CU320-2PN può realizzare in totale 8 collegamenti di comunicazione
tramite le interfacce integrate PROFINET.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
257
Comando
6.8 Comunicazione tramite PROFINET IO
Control Unit con CBE20
Nella Control Unit CU320-2 PN o CU320-2 DP è possibile inserire opzionalmente la
Communication Board CBE20:
● La Communication Board CBE20 è uno switch PROFINET con 4 ulteriori porte
PROFINET.
Nota
Routing PROFINET
Il routing non è possibile né tra le interfacce onboard X127 e X150 della CU320-2 PN né tra
le interfacce onboard della CU320-2 PN e una CBE20 inserita.
6.8.4
PROFIenergy
6.8.4.1
Descrizione
PROFIenergy è uno standard per la gestione dell'energia degli impianti di produzione basato
sul protocollo di comunicazione PROFINET. La funzionalità è certificata nel profilo
PROFIenergy del PNO. Gli apparecchi di azionamento che dispongono della funzionalità
PROFIenergy possono essere certificati da un laboratorio approvato. Gli apparecchi
certificati supportano i comandi PROFIenergy e reagiscono in funzione dei requisiti e degli
stati operativi.
SINAMICS supporta il profilo PROFIenergy V1.1. I comandi PROFIenergy vengono
trasmessi dal controllore all'azionamento con set di dati PROFINET nel funzionamento
aciclico. La trasmissione dei comandi PROFIenergy avviene tramite il set di dati PROFINET
0x80A0.
La tabella seguente fornisce una panoramica della funzionalità PROFIenergy e del supporto
dei vari apparecchi SINAMICS.
Convertitori da incasso
258
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.8 Comunicazione tramite PROFINET IO
Figura 6-35
Funzioni PROFIenergy
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
259
Comando
6.8 Comunicazione tramite PROFINET IO
6.8.4.2
Compiti di PROFIenergy
PROFIenergy è un'interfaccia dati basata su PROFINET, che consente di disinserire
centralmente gli utilizzatori in modo coordinato nei tempi di pausa, indipendentemente da
produttore e tipo di apparecchio. In questo modo deve essere messa a disposizione del
processo solo l'energia assolutamente necessaria. La maggior parte dell'energia viene
risparmiata dal processo, l'apparecchio PROFINET contribuisce solo con alcuni Watt al
potenziale di risparmio.
Figura 6-36
Risparmio energetico in pause con PROFIenergy
La disinserzione o la messa in pausa temporanea mirata di azionamenti e apparecchi non
utilizzati ha i seguenti scopi:
● Riduzione dei costi energetici
● Riduzione delle emissioni di calore
● Prolungamento della durata di vita grazie alla riduzione dei tempi di funzionamento
effettivi
● Gli apparecchi di azionamento mettono a disposizione per l'analisi dati standardizzati
relativi al consumo.
● Viene visualizzato lo stato PROFIenergy degli apparecchi interessati.
● Lo stato di PROFIenergy è disponibile tramite un'interconnessione BICO per
un'elaborazione successiva, ad es. per la disinserzione dei sistemi secondari non
necessari.
Nozioni di base
La disinserzione degli apparecchi PROFINET o dei Power Module avviene tramite comandi
speciali nel programma utente del PROFINET IO Controller. Non è necessario alcun
hardware aggiuntivo, i comandi PROFIenergy vengono interpretati direttamente dagli
apparecchi PROFINET.
Convertitori da incasso
260
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.8 Comunicazione tramite PROFINET IO
6.8.4.3
PROFIenergy - Proprietà del sistema di azionamento
Gli apparecchi del sistema di azionamento SINAMICS soddisfano i seguenti requisiti:
● Gli apparecchi sono certificati per PROFIenergy.
● Gli apparecchi supportano l'unità funzionale PROFIenergy classe 3.
● Gli apparecchi supportano il modo di risparmio energetico PROFIenergy 2.
6.8.4.4
Comandi PROFIenergy
Modo di funzionamento
All'inizio e alla fine delle pause il responsabile dell'impianto attiva o disattiva la funzione di
pausa dell'impianto; dopodiché l'IO Controller invia il comando PROFIenergy
"START_Pause" / "END_Pause" agli apparecchi PROFINET. L'apparecchio interpreta quindi
il contenuto del comando PROFIenergy e disattiva o riattiva l'impianto.
Altre funzioni PROFIenergy consentono di richiamare informazioni sull'apparecchio durante
le pause. Queste informazioni possono essere usate dall'utente per trasmettere in tempi
regolari il comando "START_Pause" / "END_Pause".
Comandi di controllo PROFIenergy
Comandi di controllo
Descrizione
START_Pause
Commuta dallo stato operativo al modo risparmio energetico in
funzione della durata della pausa.
Commuta dal modo risparmio energetico allo stato operativo in
funzione della durata della pausa.
START_Pause_with_time_response
Commuta dallo stato operativo al modo risparmio energetico e
indica inoltre i tempi di transizione nella risposta del comando.
END_Pause
Commuta dal modo risparmio energetico allo stato operativo.
Interrompe una commutazione dallo stato operativo al modo
risparmio energetico.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
261
Comando
6.8 Comunicazione tramite PROFINET IO
Comandi di interrogazione PROFIenergy
Comandi di interrogazione
Descrizione
List_Energy_Saving_Modes
Determina tutti i modi risparmio energetico supportati.
Get_Mode
Rileva il modo risparmio energetico selezionato.
PEM_Status
Rileva lo stato PROFienergy corrente.
PEM_Status_with_CTTO
Rileva lo stato PROFienergy corrente e lo stato PEM con il
tempo di transizione regolare nello stato operativo.
PE_Identify
Rileva i comandi PROFienergy supportati.
Query_Version
Mostra il profilo PROFienergy implementato.
Get_Measurement_List
Questo comando restituisce gli ID dei valori di misura, ottenibili
con il comando "Get_Measurement_Values".
Get_Measurement_List_with_object
_number
Questo comando restituisce gli ID dei valori di misura e il
rispettivo numero di oggetto, ottenibili con il comando
"Get_Measurement_Values_with_object_number".
Get_Measurement_Values
Questo comando restituisce i valori di misura richiesti tramite
l'ID
Get_Measurement_Values_with_obj
ect_number
6.8.4.5
•
Per i valori di misura di potenza: Il comando indirizza la
somma del valore di misura tramite tutti gli oggetti di
azionamento di regolazione.
•
Per i valori di misura di energia: Il comando restituisce la
somma del valore di misura tramite tutti gli oggetti di
azionamento di regolazione.
•
Per i fattori di potenza: Questo valore di misura è
supportato solo per un SINAMICS con un oggetto di
azionamento di regolazione.
Questo comando restituisce i valori di misura richiesti tramite
l'ID del valore di misura e il numero dell'oggetto. Il numero
dell'oggetto corrisponde all'ID dell'oggetto di azionamento.
Con l'ID dell'oggetto di azionamento della Control Unit i valori
di misura vengono indirizzati come con
"Get_Measurement_Value".
Valori di misura PROFIenergy
Tabella 6- 22 Panoramica dei valori di misura PROFIenergy
ID del valore Valore di
di misura
misura
PROFIenergy PROFIenergy
Unit
Parametro
sorgente
SINAMICS
Parametro sorgente
SINAMICS
Precisione
PROFIenergy
34
Active Power
166
200
Campo di valori
Nome
Dominio
Classe
W
r0032
Potenza attiva
livellata
1
12
Valore massimo di
r2004 di tutti gli
oggetti di
azionamento
Power Factor
1
r0038
Fattore di potenza
livellato
1
12
0 ... 1
Active Energy
Import
Wh
r0039[1]
Energia assorbita
2
11
-
Convertitori da incasso
262
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.8 Comunicazione tramite PROFINET IO
6.8.4.6
Modo risparmio energetico PROFIenergy
Gli apparecchi di azionamento supportano il modo risparmio energetico PROFIenergy 2. I
due parametri seguenti indicano il modo PROFIenergy attivo:
● Il parametro r5600 visualizza il modo PROFIenergy correntemente attivo.
● Il parametro r5613 indica tramite bit interconnettibili se il risparmio energetico
PROFIenergy è attivo.
Il modo risparmio energetico può essere attivato o disattivato per gli apparecchi di
azionamento tramite i comandi di controllo PROFIenergy (vedere anche i comandi
PROFIenergy).
Il modo risparmio energetico attivo viene indicato con l'avviso A08800.
Il modo risparmio energetico resta attivo negli apparecchi di azionamento anche in presenza
dei seguenti eventi:
● Interruzione del collegamento PROFINET
● Passaggio della CPU in STOP
Finché resta attivo il modo risparmio energetico PROFIenergy, tutti gli interrupt di
diagnostica nell'apparecchio di azionamento sono disattivati e non vengono trasmessi nella
modalità di risparmio energetico.
6.8.4.7
Passaggio al modo risparmio energetico dallo stato PROFIdrive di esercizio (S4)
Quando si imposta p5611.2 = 1, consentire il passaggio dallo stato di esercizio PROFIdrive
(S4) al modo risparmio energetico.
A questo scopo effettuare una delle seguenti impostazioni supplementari:
● p5611.1 = 1: il convertitore emette un comando OFF1 quando passa dal modo di
risparmio energia allo stato di blocco inserzione (S1).
● p5611.1 = 0: tramite p5614 si interconnette una sorgente di segnale tramite la quale si
disinserisce il convertitore e lo si mette in stato di blocco inserzione (S1).
Se il controllore invia il comando "End_Pause" o Start_Pause" con un tempo di pausa di 0, il
convertitore si riavvia automaticamente, sempre che le abilitazioni siano ancora impostate.
6.8.4.8
Blocco di PROFIenergy
L'impostazione del parametro p5611.0 = 1 permette di bloccare PROFIenergy
nell'apparecchio di azionamento I comandi di controllo vengono così ignorati.
6.8.4.9
Applicazioni PROFIenergy
Le applicazioni per PROFIenergy e per la programmazione con SIMATIC S7 si trovano
seguendo il collegamento seguente: Applicazioni PROFIenergy
(http://support.automation.siemens.com/WW/view/en/20229805/136000&cspltfrm=12&cssw=
0&csbinh=0).
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
263
Comando
6.8 Comunicazione tramite PROFINET IO
6.8.4.10
Schemi logici e parametri
Schema logico
FP 2381
PROFIenergy - Comandi di controllo/interrogazione
FP 2382
PROFIenergy - Stati
FP 2610
Controllo sequenziale - unità di controllo
• r5600
Pe Modo risparmio energetico ID
Parametri
• p5602[0...1] Pe Modo risparmio energetico tempo di pausa minimo
• p5606[0...1] Pe Modo risparmio energetico tempo di permanenza massimo
• p5611
Pe Risparmio energetico standard
• p5612[0...1] Pe Risparmio energetico, proprietà, dipendente dal modo
6.8.5
• r5613.0...1
CO/BO: Pe Risparmio energetico attivo/inattivo
• p5614
BI: Pe Impostazione blocco inserzione, sorgente segnale
Ulteriori informazioni sulla comunicazione tramite PROFINET IO
Ulteriori informazioni sulla comunicazione tramite PROFINET IO
Per ulteriori informazioni sulla comunicazione tramite PROFINET IO, vedere il documento
allegato "Manuale di guida alle funzioni SINAMICS S120", sezione "Comunicazione via
PROFINET IO".
Convertitori da incasso
264
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.9 Comunicazione tramite SINAMICS Link
6.9
Comunicazione tramite SINAMICS Link
6.9.1
Principi fondamentali di SINAMICS Link
SINAMICS Link consente lo scambio dati diretto tra max. 64 Control Unit (CU320-2 PN e
CU320-2 DP). Tutte le Control Unit interessate dalla scambio devono disporre del modulo
aggiuntivo CBE20. A questa comunicazione non possono essere collegati altri nodi.
Alcune applicazioni possibili sono ad esempio:
● Distribuzione dei momenti in n azionamenti
● Disposizione a cascata dei valori di riferimento in n azionamenti
● Ripartizione del carico di azionamenti accoppiati a materiali
● Funzione Master/Slave per alimentatori
Presupposti
Per il funzionamento di SINAMICS Link devono essere soddisfatti i seguenti requisiti:
● r2064[1]: Il tempo di ciclo del bus (Tdp) deve essere un multiplo intero di p0115[0] (clock
del regolatore di corrente).
● r2064[2]: Il tempo di ciclo del master (Tmapc) deve essere un multiplo intero di p0115[1]
(clock del regolatore di velocità).
● p0115[0]: Il clock del regolatore di corrente deve essere impostato a 250 µs o 500 µs. Un
clock con 400 µs non è ammesso. Se si imposta 400 µs viene emesso l'avviso A01902
con il valore di avviso "4". Come rimedio impostare il clock del regolatore di corrente
p0115[0] a 500 µs.
Dati di trasmissione e ricezione
Il telegramma SINAMICS Link contiene 16 posti (0...15) per i dati di processo (PZD1...16).
Ogni PZD è lungo esattamente 1 parola (= 16 bit). I posti non necessari vengono riempiti
automaticamente con uno zero.
Post
o
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
PZD
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
SINAMICS Link, contenuto del telegramma
Ogni nodo SINAMICS Link può inviare per ogni clock di trasmissione 1 telegramma con 16
PZD. Ogni nodo riceve tutti i telegrammi che vengono inviati. Un nodo può selezionare ed
elaborare fino a 16 PZD provenienti da tutti i telegrammi ricevuti per clock di trasmissione.
Possono essere inviate e ricevute parole semplici e parole doppie. Le parole doppie devono
essere scritte in due PZD consecutivi.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
265
Comando
6.9 Comunicazione tramite SINAMICS Link
Condizioni generali:
● Un PZD può essere inviato o ricevuto solo una volta nell'ambito di un telegramma. Se un
PZD è presente più di una volta in un telegramma, viene emesso l'avviso A50002 o
A50003.
● Non è possibile leggere i propri dati di invio; se ciò accade, viene emesso l'avviso
A50006.
● Il numero massimo di PZD che possono essere ricevuti e inviati dipende anche
dall'oggetto di azionamento. Il numero di PZD valutabili corrisponde alla comunicazione
secondo PROFIdrive, tuttavia per SINAMICS Link è limitato a 16 PZD.
Tempo di trasmissione
SINAMICS Link rende possibile un tempo di trasmissione max. di 1000 µs (con clock del
regolatore max. di 500 µs; clock del bus sincrono di 500 µs).
Clock del bus e numero di nodi
Il clock del bus di SINAMICS Link può essere sincronizzato o non sincronizzato con il clock
del regolatore di corrente.
● Il funzionamento sincronizzato viene impostato con p8812[0] = 1.
Possono comunicare tra di loro al massimo 16 nodi con clock del bus 500 µs tramite
SINAMICS Link. Il numero massimo di nodi deve essere impostato con p8811 = 16.
Possono comunicare tra di loro al massimo 64 nodi con clock del bus 1000 µs o 2000 µs
tramite SINAMICS Link. Il numero massimo di nodi deve essere impostato con
p8811 = 64.
● Nel funzionamento non sincronizzato (p8812[0] = 0) è attivo il tempo di campionamento
PZD (p2048/p8848) anziché il clock del bus (p8812[1]).
Dopo la commutazione dei parametri p8811 e p8812 occorre eseguire un POWER ON
affinché le impostazioni diventino attive.
Convertitori da incasso
266
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.9 Comunicazione tramite SINAMICS Link
6.9.2
Topologia
Per il SINAMICS Link è esclusivamente consentita una topologia della linea con la seguente
struttura.
Figura 6-37
Topologia massima
Caratteristiche
Il CBE20 può essere assegnato a IF1 o IF2 anche in caso di utilizzo di SINAMICS Link.
Ragionevolmente andrebbe usato IF2 per SINAMICS Link, dato che IF1 supporta la
conformità PROFIdrive. A questo scopo, però, IF2 deve essere attivato in modalità sincrona.
Devono essere eseguite le seguenti impostazioni dei parametri:
● Per IF1: p8839[0] = 1 (Control Unit Onboard)
● Per IF2: p8839[1] = 2 (COMM BOARD)
● Per sincronismo di clock: p8815[0] = 2 (IF2)
Impostazioni
L'immissione dei valori nella Lista esperti delle Control Unit deve avvenire nel seguente
modo:
● Il numero di ogni nodo deve essere immesso manualmente nel parametro p8836. Per
ogni nodo va immesso un numero diverso.
Immettere i numeri in ordine crescente a partire da "1".
● Se è impostato p8836 = 0, il nodo e l'intero ramo successivo per SINAMICS Link sono
disattivati.
● Non sono consentiti spazi vuoti nella numerazione.
● I rispettivi indirizzi IP vengono assegnati automaticamente e sono visibili in r8951.
● Il nodo che ha il numero 1 è automaticamente il Sync-Master della comunicazione.
● Nel funzionamento non sincronizzato (p8812[0] = 0) sono possibili al massimo 64 nodi
(p8811 = 64).
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
267
Comando
6.9 Comunicazione tramite SINAMICS Link
● Nel funzionamento sincronizzato (p8812[0] = 1) sono possibili al massimo 16 nodi
(p8811 = 16) con clock del bus di 500 µs o al massimo 64 nodi (p8811 = 64) con clock
1000 µs o 2000 µs
● Per il collegamento della CBE20 è assolutamente necessario usare le porte come
rappresentato nella figura precedente. Quindi si collega sempre la porta 2 (P2) del nodo
n con la porta 1 (P1) del nodo n+1.
● Le porte 3 e 4 della CBE20 sono disattivate nella comunicazione tramite SINAMICS Link.
6.9.3
Progettazione e messa in servizio
Messa in servizio
Per la messa in servizio procedere nel seguente modo:
1. Impostare il parametro della Control Unit p0009 = 1 (Configurazione apparecchi)
2. Impostare il parametro della Control Unit p8835 a 3 (SINAMICS Link).
3. Impostare il parametro p2037 degli oggetti di azionamento a 2 (non congelare valori di
riferimento).
4. Ai nodi con parametro p8836 assegnare il numero di nodo (alla prima Control Unit viene
sempre assegnato il numero 1). Rispettare le disposizioni illustrate nella sezione
"Topologia". Il numero di nodo 0 indica che SINAMICS Link è disattivato.
5. Impostare il parametro della Control Unit p0009 = 0 (Pronto)
6. Eseguire "Copia da RAM a ROM".
7. Eseguire un POWER ON (disinserzione/inserzione).
Trasmissione dei dati
In questo esempio il primo nodo "Control Unit 1" ha i due oggetti di azionamento
"Azionamento 1" e "Azionamento 2". Per inviare i dati procedere come segue:
1. Definire per ogni oggetto di azionamento, nei relativi parametri p2051[0...15] quali dati
(PZD) devono essere inviati. I dati vengono riservati contemporaneamente nella casella
di invio del parametro p8871[0...15].
2. Le parole doppie vanno inserite in p2061[x]. I dati delle parole doppie vengono scritti
contemporaneamente in p8861[0...15].
3. Per ogni oggetto di azionamento assegnare i parametri di invio in p8871[0...15] a una
casella di invio del proprio nodo.
Convertitori da incasso
268
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.9 Comunicazione tramite SINAMICS Link
Tabella 6- 23 Organizzazione dei dati di invio dell'azionamento 1 (DO2)
p2051[x]
p2061[x]
Indice
Indice
Contenuto
Dal
parametro
Caselle nel buffer di invio
p8871[x]
x
PZD
0
-
ZSW1
r0899
0
PZD 1
-
1
Valore attuale numero di giri parte
1
r0061[0]
1
PZD 2
2
PZD 3
3
PZD 4
4
PZD 5
-
Valore attuale numero di giri parte
2
3
5
r0080
Valore attuale coppia parte 2
-
...
15
Valore attuale coppia parte 1
Cod.anomalia att.
r2131
...
-
0
0
5
PZD 6
...
...
15
PZD 16
Tabella 6- 24 Organizzazione dei dati di invio dell'azionamento 2 (DO3)
p2051[x]
p2061[x]
Indice
Indice
Contenuto
Dal
parametro
Caselle nel buffer di invio
p8871[x]
x
PZD
0
-
ZSW1
r0899
6
PZD 7
-
1
Valore attuale numero di giri parte
1
r0061[0]
7
PZD 8
8
PZD 9
r0080
9
PZD 10
10
PZD 11
r2131
11
PZD 12
...
...
15
PZD 16
-
Valore attuale numero di giri parte
2
3
Valore attuale coppia parte 1
-
Cod.anomalia att.
5
Valore attuale coppia parte 2
...
15
...
-
0
0
Tabella 6- 25 Organizzazione dei dati di invio della Control Unit 1 (DO1)
p2051[x]
p2061[x]
Indice
Indice
Contenuto
Dal
parametro
Caselle nel buffer di invio
p8871[x]
x
PZD
0
-
Parola di comando anomalie/avvisi
r2138
12
PZD 13
-
1
Abilitazioni mancanti parte 1
r0046
13
PZD 14
14
PZD 15
15
PZD 16
15
Abilitazioni mancanti parte 2
-
0
0
La casella di invio PZD 16 non è necessaria per questo telegramma e vi viene quindi inserito
uno zero.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
269
Comando
6.9 Comunicazione tramite SINAMICS Link
1. Le parole doppie (ad es. 1 + 2) ricevono 2 caselle di invio consecutive, ad es.
p2061[1] => p8871[1] = PZD 2 e p8871[2] = PZD 3.
2. I PZD seguenti devono essere immessi nelle caselle parametri successive di p2051[x] o
p2061[2x].
3. Nelle caselle non utilizzate di p8871[0...15] viene inserito uno zero.
4. Nel parametro p8871[0...15] la sequenza dei PZD nel telegramma di invio di questo nodo
è definita tramite le immissioni nelle caselle desiderate.
5. Al clock del bus successivo il telegramma viene inviato.
Ricezione dei dati
I telegrammi inviati di tutti i nodi sono a disposizione contemporaneamente su SINAMICS
Link. Ogni telegramma ha una lunghezza di 16 PZD. Ogni telegramma riporta una label del
mittente. Per ogni nodo selezionare tra tutti i telegrammi il PZD che si desidera ricevere.
Possono essere elaborati al massimo 16 PZD.
Nota
Prima parola dei dati di ricezione
Se non si è disattivata la valutazione del bit 10 con p2037 = 2, la prima parola dei dati di
ricezione (PZD 1) deve essere una parola di comando in cui è impostato bit 10 = 1.
In questo esempio la Control Unit 2 riceve tutti i dati dal telegramma della Control Unit 1. Per
la ricezione dei dati procedere nel seguente modo:
1. Nel parametro p8872[0…15] immettere l'indirizzo del nodo da cui si desidera leggere uno
o più PZD (ad es. p8872[3] = 1 → lettura di PZD 4 dal nodo 1, p8872[15] = 0 → nessuna
lettura di PZD 16).
2. Dopo l'impostazione dei parametri è possibile leggere i valori tramite i parametri
r2050[0…15] o r2060[0…15].
Tabella 6- 26 Dati di ricezione per la Control Unit 2
Dal mittente
Trasferiment
o da
Ricevente
Parola tel.
p8871[x]
Indirizzo
p8872[x]
Buffer di
ricezione
p8870[x]
Trasferimento di dati in
r2050[x]
r2060[x]
Parametri
Contenuto
p2051[0]
0
1
PZD 1
0
-
r0899
ZSW1
p2061[1]
1
1
PZD 2
-
1
r0061[0]
Valore attuale numero di giri
parte 1
2
1
PZD 3
-
r0061[0]
Valore attuale numero di giri
parte 2
3
1
PZD 4
-
3
r0080
Valore attuale coppia parte 1
p2061[3]
4
1
PZD 5
-
p2051[5]
5
1
PZD 6
5
-
r2131
Valore attuale coppia parte 2
Cod.anomalia att.
p2051[4]
6
1
PZD 7
6
-
r0899
ZSW1
p2061[5]
7
1
PZD 8
-
7
r0061[0]
Valore attuale numero di giri
parte 1
Convertitori da incasso
270
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.9 Comunicazione tramite SINAMICS Link
Dal mittente
Trasferiment
o da
p2061[6]
Ricevente
Parola tel.
p8871[x]
Indirizzo
p8872[x]
Buffer di
ricezione
p8870[x]
Trasferimento di dati in
8
1
PZD 9
-
r2050[x]
r2060[x]
Parametri
Contenuto
Valore attuale numero di giri
parte 2
9
1
PZD 10
-
10
1
PZD 11
-
p2051[7]
11
1
PZD 12
11
-
r2131
Cod.anomalia att.
p2051[8]
12
1
PZD 13
12
-
2138
Parola di comando
anomalie/avvisi
p2061[9]
13
1
PZD 14
-
13
r0046
Abilitazioni mancanti parte 1
14
1
PZD 15
-
15
0
PZD 16
15
-
9
r0080
Valore attuale coppia parte 1
Valore attuale coppia parte 2
Abilitazioni mancanti parte 2
-
0
vuota
Par.tel. = parola telegramma
Nota
Per le parole doppie vanno letti 2 PZD in sequenza. Leggere un valore di riferimento a 32 bit,
che si trova in PZD 2+PZD 3 nel telegramma del nodo 2, e rappresentarlo su PZD 2+PZD 3
del nodo 1:
p8872[1] = 2, p8870[1] = 2, p8872[2] = 2, p8870[2] = 3
Attivazione
Per l'attivazione dei collegamenti di SINAMICS Link eseguire il POWER ON in tutti i nodi. Le
assegnazioni di p2051[x]/2061[2x] e le connessioni dei parametri di lettura r2050[x]/2060[2x]
possono essere modificate senza POWER ON.
Impostazioni per apparecchi da incasso con frequenza impulsi nominale 1,25 kHz
Per i seguenti apparecchi da incasso con frequenza impulsi nominale 1,25 kHz occorre
inoltre impostare il parametro p0115[0] da 400 µs a 250 µs o 500 µs:
● 3 AC 380 ... 480 V: tutti gli apparecchi da incasso con corrente di uscita nominale IN ≥
605 A
● 3 AC 500 ... 600 V: tutti gli apparecchi da incasso
● 3 AC 660 ... 690 V: tutti gli apparecchi da incasso
In generale devono essere soddisfatte le seguenti condizioni:
1. r2064[1] Il tempo di ciclo del bus (Tdp) deve essere un multiplo intero di p0115[0] (clock
del regolatore di corrente).
2. r2064[2] Il tempo di ciclo del bus (Tmapc) deve essere un multiplo intero di p0115[1]
(clock del regolatore di velocità).
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
271
Comando
6.9 Comunicazione tramite SINAMICS Link
6.9.4
Esempio
Definizione del compito
Progettare SINAMICS Link per 2 nodi e la trasmissione dei seguenti valori:
● Dati di invio dal nodo 1 al nodo 2
– r0898 CO/BO: Parola di comando controllo sequenziale azionamento 1 (1 PZD),
nell'esempio PZD 1
– r0079 CO: Valore di riferimento complessivo della coppia (2 PZD), nell'esempio PZD 2
– r0021 CO: valore attuale del numero di giri livellato (2 PZD), nell'esempio PZD 3
● Dati di invio dal nodo 2 al nodo 1
– r0899 CO/BO: Parola di stato controllo sequenziale azionamento 2 (1 PZD),
nell'esempio PZD 1
Procedura
1. Per tutti i nodi impostare p0009 = 1 per modificare la configurazione dell'apparecchio.
2. Per tutti i nodi, impostare per la CBE20 il modo operativo "SINAMICS Link" tramite
p8835 = 3.
3. Assegnare i numeri di nodo per gli apparecchi interessati:
– Nodo 1: p8836 = 1 e
– Nodo 2: p8836 = 2
4. Impostare per entrambi i nodi p0009 = 0, eseguire il comando "Copia da RAM a ROM" e
successivamente un POWER ON.
5. Impostare tutte le CBE20 al funzionamento con sincronismo di clock p8812[0] = 1.
6. Per tutti i nodi effettuare la seguente impostazione dell'interfaccia:
– Per IF1: p8839[0] = 2 (COMM BOARD)
– Per IF2: p8839[1] = 1 (Control Unit Onboard)
7. Per tutti i nodi limitare il numero max. di nodi con p8811 = 16.
8. Impostare per entrambi i nodi p0009 = 0, eseguire il comando "Copia da RAM a ROM" e
successivamente un POWER ON per rendere attive la variante firmware modificata e le
nuove impostazioni nella CBE20.
9. Definire i dati di invio per il nodo 1:
– Definire i PZD che il nodo 1 deve inviare:
p2051[0] = azionamento1:r0898 (lunghezza PZD: 1 parola)
p2061[1] = azionamento1:r0079 (lunghezza PZD: 2 parole)
p2061[3] = azionamento1:r0021 (lunghezza PZD: 2 parole)
– Impostare i seguenti PZD nel buffer di invio (p8871) del nodo 1:
p8871[0] = 1 (r0898)
p8871[1] = 2 (r0079 parte 1)
p8871[2] = 3 (r0079 parte 2)
Convertitori da incasso
272
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.9 Comunicazione tramite SINAMICS Link
p8871[3] = 4 (r0021 parte 1)
p8871[4] = 5 (r0021 parte 2)
10.Definire i dati di ricezione per il nodo 2:
– Definire che i dati che vengono collocati nel buffer di ricezione p8872 del nodo 2 nei
posti 0 ... 4 vengano ricevuti dal nodo 1:
p8872[0] = 1
p8872[1] = 1
p8872[2] = 1
p8872[3] = 1
p8872[4] = 1
– Definire che PZD1, PZD2 e PZD3 del nodo 1 vengano collocati nei posti nel buffer di
ricezione p8870 del nodo 2 nei posti 0 ... 4:
p8870[0] = 1 (PZD1)
p8870[1] = 2 (PZD2 parte 1)
p8870[2] = 3 (PZD2 parte 2)
p8870[3] = 4 (PZD3 parte 1)
p8870[4] = 5 (PZD3 parte 2)
– ora r2050[0], r2060[1] e r2060[3] contengono i valori di PZD 1, PZD 2 e PZD 3 del
nodo 1.
11.Definire i dati di invio per il nodo 2:
– Definire i PZD che il nodo 2 deve inviare:
p2051[0] = azionamento1:r0899 (la lunghezza PZD è 1 parola)
– Impostare questi PZD nel buffer di invio (p8871) del nodo 2:
p8871[0] = 1
12.Definire i dati di ricezione per il nodo 1:
– Definire che i dati che vengono collocati nel buffer di ricezione p8872 del nodo 1 nel
posto 0 vengano ricevuti dal nodo 2:
p8872[0] = 2
– Definire che il PZD1 del nodo 2 venga collocato nel buffer di ricezione p8870 del nodo
1 nel posto 0:
p8870[0] = 1
– ora r2050[0] contiene il valore di PZD 1 del nodo 2.
13.Eseguire sui due nodi il comando "Copia da RAM a ROM" per salvare la
parametrizzazione e i dati.
14.Eseguire un POWER ON su entrambi i nodi per attivare i collegamenti di SINAMICS Link.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
273
Comando
6.9 Comunicazione tramite SINAMICS Link
Figura 6-38
6.9.5
SINAMICS Link: Esempio di progettazione
Interruzione della comunicazione nell'avviamento o nel funzionamento ciclico
Se almeno un nodo SINAMICS Link non funziona correttamente dopo la messa in servizio o
si interrompe durante il funzionamento ciclico, viene emesso per gli altri nodi l'avviso A50005
"Impossibile trovare l'emettitore su SINAMICS Link".
Il valore di avviso contiene il numero dell'emettitore non trovato. Dopo l'eliminazione
dell'errore sul nodo interessato, l'avviso viene rimosso automaticamente.
Qualora siano interessati più nodi, viene visualizzato il messaggio con diversi numeri di nodo
uno di seguito all'altro. Dopo l'eliminazione dell'errore sui nodi interessati, l'avviso viene
rimosso automaticamente.
In caso di guasto di un nodo nel funzionamento ciclico, oltre all'avviso A50005 viene emessa
anche l'anomalia F08501 "COMM BOARD: Timeout del valore di riferimento".
Convertitori da incasso
274
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.9 Comunicazione tramite SINAMICS Link
6.9.6
Tempi di trasmissione per SINAMICS Link
Tempi di trasmissione per clock di comunicazione 1 ms
p2048/p8848 = 1 ms
Clock del bus [ms]
Tempi di trasmissione [ms]
Sync entrambi
Sync invio
Sync ricez.
Async entrambi
0,5
1,0
1,5
1,3
1,6
1,0
1,5
2,1
2,1
2,2
2,0
3,0
3,6
3,1
2,8
Tempi di trasmissione per clock di comunicazione 4 ms
p2048/p8848 = 4 ms
Clock del bus [ms]
Tempi di trasmissione [ms]
Sync entrambi
Sync invio
Sync ricez.
Async entrambi
0,5
1,0
3,0
2,8
4,6
1,0
1,5
3,6
3,6
5,2
2,0
3,0
5,1
4,6
5,8
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
275
Comando
6.10 Servizi di comunicazione e numeri di porta utilizzati
6.9.7
Schemi logici e parametri
Schema logico
FP 2198
Trasferimento dati - SINAMICS Link (p8835 = 3)
FP 2199
Trasferimento dati - SINAMICS Link, assegnazione PZD (p8835 = 3)
• p0115
Tempo di campionamento per funzioni aggiuntive
• p2037
IF1 PROFIdrive STW1.10 = 0 modalità
Parametri
• r2050[0...31] CO: IF1 PROFIdrive PZD ricezione parola
• p2051[0...31] CI: IF1 PROFIdrive PZD invio parola
• r2060[0...30] CO: IF1 PROFIdrive PZD ricezione parola doppia
• p2061[0...30] CI: IF1 PROFIdrive PZD invio parola doppia
• p8811
Selezione progetto SINAMICS Link
• p8812[0...1] Impostazioni SINAMICS Link
6.10
• p8835
CBE20 Selezione firmware
• p8836
Indirizzo SINAMICS Link
• p8839
Assegnazione hardware all'interfaccia PZD
• p8870
Ricezione PZD parola di telegramma SINAMICS Link
• p8871
Invio PZD parola di telegramma SINAMICS Link
• p8872
Ricezione PZD indirizzo SINAMICS Link
Servizi di comunicazione e numeri di porta utilizzati
L'apparecchio di azionamento supporta i protocolli riportati nella tabella seguente. Per ogni
protocollo sono specificati i parametri dell'indirizzo, il livello di comunicazione interessato e il
ruolo di comunicazione.
Queste informazioni consentono di adattare le misure di sicurezza per la tutela del sistema
di automazione in funzione dei protocolli utilizzati (ad es. firewall). Dato che le misure di
sicurezza si limitano a reti Ethernet o PROFINET, nella tabella non sono riportati protocolli
PROFIBUS.
La tabella seguente mostra i diversi livelli e protocolli utilizzati.
Convertitori da incasso
276
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.10 Servizi di comunicazione e numeri di porta utilizzati
Livelli e protocolli
Protocollo
Numero di
porta
(2) Livello Link-Layer
Funzione
Descrizione
Nodi/partner
raggiungibili
DCP viene utilizzato da PROFINET per
determinare gli apparecchi PROFINET e
per consentire di effettuare le impostazioni
di base.
(4) Livello di trasporto
Protocolli PROFINET
DCP
non rilevante
Discovery and
configuration
protocol
(2) Ethernet II and
IEEE 802.1Q and
Ethertype 0x8892
(PROFINET)
PROFINET
Discovery and
configuration
DCP utilizza lo speciale indirizzo MulticastMAC:
xx-xx-xx-01-0E-CF,
xx-xx-xx = Organizationally Unique
Identifier
LLDP
non rilevante
Link Layer
Discovery
protocol
(2) Ethernet II and
IEEE 802.1Q and
Ethertype 0x88CC
(PROFINET)
PROFINET
Link Layer
Discovery
protocol
LLDP viene utilizzato da PROFINET per
determinare e gestire rapporti di vicinanza
tra apparecchi PROFINET.
LLDP utilizza lo speciale indirizzo
Multicast-MAC:
01-80-C2-00-00-0E
MRP
non rilevante
Media
Redundancy
Protocol
(2) Ethernet II and
IEEE 802.1Q and
Ethertype 0x88E3
(PROFINET)
PROFINET
medium
redundancy
MRP consente il controllo di percorsi di
trasmissione tramite una topologia ad
anello.
MRP utilizza lo speciale indirizzo
Multicast-MAC:
xx-xx-xx-01-15-4E,
xx-xx-xx = Organizationally Unique
Identifier
PTCP
non rilevante
Precision
Transparent
Clock Protocol
(2) Ethernet II and
IEEE 802.1Q and
Ethertype 0x8892
(PROFINET)
PROFINET
send clock and
time
synchronisation
, based on
IEEE 1588
PTC consente una misura del ritardo tra le
porte RJ45 e quindi la sincronizzazione
del clock di invio e la sincronizzazione di
data/ora.
PTCP utilizza lo speciale indirizzo
Multicast-MAC:
xx-xx-xx-01-0E-CF,
xx-xx-xx = Organizationally Unique
Identifier
PROFINET IO
data
non rilevante
(2) Ethernet II and
IEEE 802.1Q and
Ethertype 0x8892
(PROFINET)
PROFINET
Cyclic IO data
transfer
I telegrammi PROFINET IO vengono usati
per trasferire ciclicamente dati IO tra
controller PROFINET IO e IO Devices
tramite Ethernet.
PROFINET
Context Manager
34964
(4) UDP
PROFINET
PROFINET Context Manager mette a
connection less disposizione un Endpoint Mapper per
RPC
creare un riferimento all'applicazione
(PROFINET AR).
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
277
Comando
6.10 Servizi di comunicazione e numeri di porta utilizzati
Protocollo
Numero di
porta
(2) Livello Link-Layer
Funzione
Descrizione
Hypertext
transfer
protocol
HTTP viene utilizzato per la
comunicazione con il server Web interno
alla CU.
(4) Livello di trasporto
Protocolli di comunicazione orientati al collegamento
HTTP
80
(4) TCP
Hypertext transfer
protocol
ISO on TCP
Nello stato di fornitura è aperto e può
essere disattivato.
102
(4) TCP
(conformemente
a
ISO-on-TCP
protocol
RFC 1006)
ISO on TCP (conformemente a RFC 1006)
serve allo scambio di dati orientato ai
messaggi con CPU remote, WinAC o
apparecchi di altri produttori.
Comunicazione con ES, HMI, ecc.
Nello stato di fornitura è aperto ed è
sempre necessario.
SNMP
161
(4) UDP
Simple network
management
protocol
HTTPS
Nello stato di fornitura è aperto ed è
sempre necessario.
443
(4) TCP
Secure Hypertext
transfer protocol
Reserved
Simple network SNMP consente la lettura e l'impostazione
di dati di gestione di rete (SNMP managed
management
Objects) da parte di SNMP Manager.
protocol
49152...65535
(4) TCP
(4) UDP
Secure
Hypertext
transfer
protocol
-
HTTPS viene utilizzato per comunicare
con il server Web interno alla CPU tramite
Secure Socket Layer (SSL).
Nello stato di fornitura è aperto e può
essere disattivato.
Intervallo di porta dinamico utilizzato per il
punto finale del collegamento attivo se
l'applicazione non determina il numero di
porta locale.
Convertitori da incasso
278
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.11 Funzionamento in parallelo delle interfacce di comunicazione
6.11
Funzionamento in parallelo delle interfacce di comunicazione
Informazioni generali
Le due interfacce cicliche per i valori di riferimento e i valori reali si differenziano per i campi
di parametri utilizzati (tecnica BICO, ecc.) e le funzionalità utilizzabili. Le interfacce sono
definite interfaccia ciclica 1 (IF1) e interfaccia ciclica 2 (IF2).
Con le interfacce IF1 e IF2 vengono elaborati dati di processo ciclici (valori di
riferimento/valori attuali). A tale scopo esistono le seguenti interfacce:
● Interfacce onboard della Control Unit per PROFIBUS DP o PROFINET.
● Un'interfaccia opzionale (COMM-Board) per PROFINET (CBE20) o CANopen (CBE10)
da inserire nella Control Unit
Con il parametro p8839 viene impostato l'uso parallelo delle interfacce Control Unit Onboard
e COMM Board. Tramite gli indici viene assegnata la funzionalità alle interfacce IF1 e IF2.
In questo modo è possibile realizzare ad esempio le seguenti applicazioni:
● PROFIBUS DP per il controllo dell'azionamento e PROFINET per il rilevamento dei valori
attuali/di riferimento dell'azionamento.
● PROFIBUS DP per il controllo e PROFINET solo per l'engineering
● Funzionamento misto con due master (il primo per la logica e la coordinazione e il
secondo per la tecnologia)
● SINAMICS Link tramite IF2 (CBE20), telegrammi standard e PROFIsafe tramite IF1
● Funzionamento di interfacce di comunicazione ridondanti
Assegnazione delle interfacce di comunicazione alle interfacce cicliche
Le interfacce di comunicazione vengono assegnate in modo fisso con l'impostazione p8839
= 99 ad una delle interfacce cicliche (IF1, IF2), in funzione del sistema di comunicazione, ad
es. PROFIBUS DP, PROFINET o CANopen.
L'assegnazione alle interfacce cicliche per il funzionamento in parallelo delle interfacce di
comunicazione è definibile liberamente tramite parametrizzazione utente.
Tabella 6- 27 Proprietà delle interfacce cicliche IF1 e IF2
Caratteristica
IF1
IF2
Valore di riferimento (sorgente del segnale BICO)
r2050, r2060
r8850, r8860
Valore attuale (ricevitore del segnale BICO)
p2051, p2061
p8851, p8861
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
279
Comando
6.11 Funzionamento in parallelo delle interfacce di comunicazione
Tabella 6- 28 Assegnazione implicita hardware a interfacce cicliche con p8839[0] = p8839[1] = 99
Interfaccia hardware inserita
IF1
IF2
Nessuna opzione, solo interfaccia onboard
Control Unit
(PROFIBUS, PROFINET o USS)
Control Unit Onboard
--
CU320-2 DP con CBE20 (interfaccia PROFINET
opzionale)
COMM BOARD
Control Unit Onboard
PROFIBUS o Control
Unit Onboard USS
CU320-2 PN con CBE20 (interfaccia PROFINET
opzionale)
Control Unit Onboard
COMM BOARD
PROFINET
Opzione CAN CBC10
Control Unit Onboard
COMM BOARD CAN
Con il parametro p8839[0,1] viene impostato il funzionamento in parallelo delle interfacce
hardware e l'assegnazione alle interfacce cicliche IF1 e IF2 per l'oggetto di azionamento
Control Unit.
L'ordine degli oggetti per lo scambio dati di processo tramite IF2 si basa sull'ordine degli
oggetti di IF1; vedere "Lista degli oggetti di azionamento" (p0978).
L'impostazione di fabbrica di p8839[0,1] = 99 consente di attivare l'assegnazione implicita
(vedere la tabella precedente).
In caso di parametrizzazione dell'assegnazione non consentita o incoerente viene emesso
un avviso.
Nota
Funzionamento in parallelo PROFIBUS e PROFINET
I dati delle applicazioni con sincronismo di clock possono solo essere elaborati tramite una
delle due interfacce, IF1 o IF2 (p8815). Se inoltre nella CU320-2 DP è inserito il modulo
PROFINET CBE20, vi sono 2 possibilità di parametrizzazione:
- p8839[0] = 1 e p8839[1] = 2: PROFIBUS con sincronismo di clock, PROFINET ciclico
- p8839[0] = 2 e p8839[1] = 1: PROFINET con sincronismo di clock, PROFIBUS ciclico
Parametri per IF2
Per ottimizzare IF2 per un collegamento PROFIBUS o PROFINET, sono disponibili i
seguenti parametri:
● Dati di processo di ricezione e di invio:
r8850, p8851, r8853, r8860, p8861, r88631)
● Parametri di diagnostica:
r8874, r8875, r88761)
● Convertitore binettore-connettore
p8880, p8881, p8882, p8883, p8884, r88891)
● Convertitore connettore-binettore
r8894, r8895, p8898, p88991)
1)
Significato di 88xx identico a 20xx
Convertitori da incasso
280
Istruzioni operative, 04/2014, A5E00386872A
Comando
6.11 Funzionamento in parallelo delle interfacce di comunicazione
Nota
Con il tool di progettazione Config HW non è possibile rappresentare uno slave
PROFIBUS/device PROFINET con 2 interfacce. Nel funzionamento in parallelo,
l'azionamento SINAMICS appare quindi 2 volte nel progetto o nei 2 progetti, nonostante
fisicamente si tratti di un solo apparecchio.
Parametri
p8839
Assegnazione hardware all'interfaccia PZD
Descrizione:
Assegnazione dell'hardware per la comunicazione ciclica tramite le interfacce 1 e 2
del PZD.
Valore:
0: Inattivo
1: Control Unit Onboard
2: COMM BOARD
99: Automatico
Per p8839 valgono le seguenti regole:
● L'impostazione di p8839 vale per tutti gli oggetti di azionamento di una Control Unit
(parametri Device).
● Le impostazioni p8839[0] = 99 e p8839[1] = 99 (assegnazione automatica, impostazione
di fabbrica) consentono di assegnare automaticamente l'hardware utilizzato alle
interfacce IF1 e IF2. Per poter attivare l'assegnazione automatica devono essere
selezionati entrambi gli indici. Se non sono selezionati entrambi gli indici, viene emesso
un avviso e l'impostazione p8839[x] = 99 viene considerata 'inattiva'.
● Se in p8839[0] e p8839[1] viene selezionato lo stesso hardware (Control Unit onboard o
COMM BOARD), viene emesso un avviso. In tal caso vale quanto segue: Vale
l'impostazione di p8839[0] e l'impostazione di p8839[1] viene considerata 'inattiva'.
● Se viene utilizzato la CAN Board (CBC10), l'impostazione p8839[0] = 2 non è consentita
(nessuna assegnazione della CAN Board all'IF1). In questo caso viene emesso un
avviso.
● Se è impostato p8839[x] = 2 e la COMM BOARD è mancante o difettosa, l'interfaccia
corrispondente non viene alimentata dall'interfaccia onboard della Control Unit. Viene
invece emesso il messaggio A08550.
Parametri
• p0922
IF1 PROFIdrive Selezione telegramma
• p0978[0...24] Lista oggetti azionamento
• p8815[0...1]
IF1/IF2 PZD Selezione funzionalità
• p8839[0...1]
Assegnazione hardware all'interfaccia PZD
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
281
Comando
6.12 Engineering Software Drive Control Chart (DCC)
6.12
Engineering Software Drive Control Chart (DCC)
Progettazione grafica e ampliamento della funzionalità delle apparecchiature mediante blocchi
disponibili di regolazione, calcolo e logica
Drive Control Chart (DCC) amplia la possibilità di configurare in modo estremamente
semplice funzioni tecnologiche sia per il sistema di Motion Control SIMOTION che per il
sistema di azionamento SINAMICS. In questo modo l'utente può beneficiare di nuove
possibilità di adattamento di tali sistemi alle funzioni specifiche della propria macchina.
DCC non è soggetto ad alcuna limitazione per quanto riguarda il numero di funzioni
utilizzabili; questo numero è limitato solo dalla potenza della piattaforma di destinazione.
L'Editor DCC, facile da usare, consente una progettazione grafica di semplice utilizzo ed una
chiara rappresentazione di strutture di regolazione, nonché un elevato grado di riutilizzabilità
di progetti già realizzati.
Per determinare la funzionalità di comando e regolazione, dei blocchi con funzionalità multiistanza (Drive Control Blocks (DCB)) vengono scelti da una biblioteca predefinita (biblioteca
DCB) e interconnessi graficamente mediante drag and drop.
Funzioni di test e diagnostica consentono di verificare il comportamento del programma e di
identificare la causa in caso di errore.
La biblioteca di blocchi comprende una vasta scelta di blocchi di regolazione, calcolo e
logica nonché ampie funzioni di comando e regolazione.
Per la combinazione, l'analisi e l'acquisizione di segnali binari sono disponibili tutte le usuali
funzioni logiche (AND, XOR, ritardi all'eccitazione/diseccitazione, memoria RS, contatori
ecc.). Per la sorveglianza e la valutazione di grandezze numeriche sono a disposizione
numerose funzioni di calcolo come generazione del valore, divisione e determinazione del
valore minimo/massimo.
Oltre alla regolazione dell'azionamento è possibile progettare facilmente e senza problemi
funzioni di avvolgitori assiali, regolatori PI, generatori di rampa o generatori di vobulazione.
Unitamente al Motion Control System SIMOTION è possibile una programmazione quasi
illimitata di strutture di regolazione. Queste possono essere poi combinate con altre parti di
programma per dare origine a un programma completo.
Inoltre Drive Control Chart per SINAMICS offre una base pratica per la soluzione di compiti
di comando e regolazione direttamente nel convertitore. Ne risulta un'ulteriore capacità di
adattamento di SINAMICS alle esigenze dell'utente. L'elaborazione sul posto
nell'azionamento supporta la realizzazione di concetti di macchina modulari e contribuisce
ad un aumento della performance complessiva della macchina.
Nota
Documentazione dettagliata
Per una descrizione dettagliata dell'Editor DCC e dei Drive Control Block disponibili, vedere
la relativa documentazione. Questa documentazione è contenuta nel CD.
Convertitori da incasso
282
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.1
7
Contenuto del capitolo
Questo capitolo descrive le funzioni Canale del valore di riferimento e Regolazione
● Canale del valore di riferimento
– Inversione di direzione
– Giri escludibili
– Numero di giri minimo
– limitazione del numero di giri
– Generatore di rampa
● Controllo U/f
● Regolazione di velocità vettoriale con/senza encoder
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
283
Canale del valore di riferimento e regolazione
7.2 Canale del valore di riferimento
Schemi logici
In alcuni punti di questo capitolo si fa riferimento a schemi logici. Questi si trovano nel CD
della documentazione nel "Manuale delle liste SINAMICS G130/G150", in cui è descritta nei
dettagli la funzionalità complessiva ad uso degli utenti più esperti.
7.2
Canale del valore di riferimento
7.2.1
Addizione del valore di riferimento
Descrizione
Il valore di riferimento aggiuntivo può essere usato per applicare valori di correzione da unità
di regolazione sovraordinate. Ciò si può realizzare tramite il punto di addizione di valore di
riferimento principale/aggiuntivo nel canale del riferimento. Entrambe le grandezze vengono
lette contemporaneamente tramite due sorgenti del valore di riferimento separate o una sola
sorgente del valore di riferimento e sommate nell’apposito canale.
Schema logico
FP 3030
Valore di riferimento principale/aggiuntivo, scala del valore di riferimento, JOG
• p1070
Valore di riferimento principale
• p1071
Valore di riferimento principale, scalatura
• r1073
Valore di riferimento principale attivo
• p1075
Valore di riferimento aggiuntivo
• p1076
Valore di riferimento aggiuntivo, scalatura
• r1077
Valore di riferimento aggiuntivo attivo
• r1078
Valore di riferimento totale attivo
Parametri
Convertitori da incasso
284
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.2 Canale del valore di riferimento
7.2.2
Inversione di direzione
Descrizione
Attraverso l'inversione di rotazione nel canale del valore di riferimento, l'azionamento può
funzionare in entrambe le direzioni con la stessa polarità del valore di riferimento.
Attraverso i parametri p1110 o p1111 è possibile limitare il senso di rotazione positivo o
negativo.
Nota
Senso di rotazione errato nel montaggio dei cavi
Se durante il montaggio dei cavi è stato utilizzato il senso di rotazione errato e non lo si può
correggere con una successiva sostituzione dei cavi del motore, è possibile modificarlo nel
corso della messa in servizio dell'azionamento tramite p1821 (Inversione del senso di
rotazione), in modo da ottenere l'inversione del senso di rotazione. Una modifica del
parametro p1821 provoca un'inversione di direzione del motore e del valore attuale
dell'encoder senza variazione del valore di riferimento.
Presupposti
L'inversione di rotazione avviene:
● con la gestione via PROFIBUS della parola di comando 1, Bit 11
● con la gestione tramite pannello operatore (modo LOCAL) del tasto “Inversione del senso
di rotazione”
Nota
Stato di fornitura:
Occorre ricordare che, se il controllo avviene tramite AOP30, nello stato di fornitura è
abilitato un solo senso di rotazione.
Schema logico
FP 3040
Limitazione di direzione e inversione di direzione
• p1110
BI: Blocco direzione negativa
• p1111
BI: Blocco direzione positiva
• p1113
BI: Inversione del valore di riferimento
• r1114
Valore di riferimento dopo limitazione di direzione
Parametri
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
285
Canale del valore di riferimento e regolazione
7.2 Canale del valore di riferimento
7.2.3
Bande di arresto, numero di giri minimo
Descrizione
Per gli azionamenti regolati in velocità può accadere che nel campo di regolazione dell’intera
catena cinematica degli azionamenti si trovino dei numeri di giri critici, nell’ambito dei quali
non è possibile un funzionamento stazionario. Ciò vuol dire che questo campo può essere
superato ma che l'azionamento non deve stazionarvi altrimenti si verificano fenomeni di
oscillazione dovuti alle risonanze. Con le bande escludibili si ha la possibilità di inibire questi
settori per poter avere il funzionamento stazionario. Poiché i punti critici del campo di
regolazione di una catena cinematica di azionamenti si possono spostare a causa
dell'invecchiamento o di fenomeni termici, è necessario inibire un vasto campo di
regolazione. Per evitare che si verifichino costantemente variazioni di giri a gradino
nell'ambito di queste bande di arresto, esse sono dotate di isteresi.
Le bande di arresto valgono nel senso di rotazione positivo e negativo.
Impostando un numero di giri minimo è possibile bloccare un determinato campo intorno al
numero di giri 0 min-1 per il funzionamento stazionario.
Schema del flusso dei segnali
Figura 7-1
Schema del flusso dei segnali: Bande di arresto, numero di giri minimo
Schema logico
FP 3050
Bande di arresto e limitazioni del senso di rotazione
Convertitori da incasso
286
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.2 Canale del valore di riferimento
Parametri
7.2.4
• p1080
Numero di giri minimo
• p1091
Giri escludibili 1
• p1092
Giri escludibili 2
• p1093
Giri escludibili 3
• p1094
Giri escludibili 4
• p1098
Numeri di giri escludibili, scalatura
• r1099.0
Banda escludibile, parola di stato
• p1101
Giri escludibili, larghezza di banda
• p1106
Numero di giri minimo, sorgente del segnale
• r1112
Valore di riferimento del numero di giri dopo limitazione minima
Limitazione del numero di giri
Descrizione
Con la limitazione del numero di giri è possibile definire il limite massimo consentito per la
catena cinematica di azionamenti allo scopo di proteggere la macchina / il processo da danni
provocati dal superamento del numero di giri.
Schema del flusso dei segnali
Figura 7-2
Schema del flusso dei segnali: Limitazione del numero di giri
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
287
Canale del valore di riferimento e regolazione
7.2 Canale del valore di riferimento
Schema logico
FP 3050
Bande di arresto e limitazioni del senso di rotazione
• p1082
Numero di giri max.
• p1083
CO: Limite del numero di giri, senso di rotazione positivo
• r1084
CO: Limite del numero di giri positivo attivo
• p1085
CI: Limite del numero di giri, senso di rotazione positivo
• p1086
CO: Limite del numero di giri, senso di rotazione negativo
• r1087
CO: Limite n. di giri negativo attivo
• p1088
CI: Limite del numero di giri, senso di rotazione negativo
• r1119
CO: Generatore di rampa, valore di riferimento all'ingresso
Parametri
7.2.5
Generatore di rampa
Descrizione
Con il generatore di rampa viene limitata la velocità di variazione del valore di riferimento ad
ogni accelerazione o decelerazione dell'azionamento. Esso impedisce che variazioni
repentine e involontarie del valore di riferimento sovraccarichino la catena cinematica di
azionamenti. Inoltre gli arrotondamenti impostati nel campo di giri inferiore e superiore
migliorano le proprietà di regolazione relative a carichi impulsivi. In questo modo vengono
preservati i componenti meccanici come alberi e giunti.
Il tempo di rampa di accelerazione e di decelerazione si riferisce sempre al numero di giri
massimo (p1082). I tempi di arrotondamento ulteriormente impostabili possono contribuire
ad evitare le sovraelongazioni del numero di giri al raggiungimento del valore di riferimento
impostato. In questo modo viene migliorata la qualità della regolazione.
Con l'arrotondamento finale impostato è possibile che la riduzione improvvisa del valore di
riferimento durante la fase di rampa provochi la sovraelongazione dello stesso se tramite
p1134 = 0 è selezionato un livellamento costante. Più il tempo di arrotondamento finale
impostato è elevato, maggiore è la sovraelongazione.
L'arrotondamento è attivo anche nel passaggio per lo zero, cioè nella fase di inversione di
rotazione l'uscita del generatore di rampa viene ridotta fino a zero passando
dall'arrotondamento iniziale alla decelerazione e all'arrotondamento finale; successivamente
dall'arrotondamento iniziale all'accelerazione e all'arrotondamento finale con il nuovo valore
di riferimento invertito. In caso di arresto rapido (OFF3) sono attivi tempi di arrotondamento
impostabili separatamente. I tempi di accelerazione e decelerazione effettivi si allungano con
l'arrotondamento attivo.
Il tipo di arrotondamento può essere impostato mediante p1134 e attivato e disattivato
separatamente mediante p1151.0 nel passaggio per lo zero.
Convertitori da incasso
288
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.2 Canale del valore di riferimento
Il tempo di accelerazione (p1120) può essere scalato tramite l'ingresso connettore p1138, il
tempo di decelerazione (p1121) tramite l'ingresso connettore p1139. Nell'impostazione di
fabbrica la scalatura è disattivata.
Nota
Tempo di accelerazione effettivo
Il tempo di accelerazione effettivo si allunga impostando i tempi di arrotondamento iniziale e
finale.
Tempo di accelerazione effettivo = p1120 + (0,5 x p1130) + (0,5 x p1131)
Schema del flusso dei segnali
Figura 7-3
Schema del flusso dei segnali: Generatore di rampa
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
289
Canale del valore di riferimento e regolazione
7.2 Canale del valore di riferimento
Retroazione del generatore di rampa
Se l'azionamento si trova nel campo dei limiti di coppia, il valore attuale del numero di giri si
allontana dal valore di riferimento del numero di giri. La retroazione del generatore di rampa
aggiorna il valore di riferimento del numero di giri in base al valore attuale del numero di giri
e spiana la rampa.
Tramite p1145 è possibile disattivare la retroazione del generatore di rampa (p1145 = 0) o
impostare lo scostamento ammesso (p1145 > 1). Se si raggiunge lo scostamento max.
ammesso, il valore di riferimento del numero di giri nell'uscita del generatore di rampa viene
incrementato solo con lo stesso rapporto.
I parametri p1151.1 e p1151.2 permettono di impostare se l'inseguimento del generatore di
rampa avviene con o senza inversione di polarità.
Il parametro r1199.5 mostra se è attivo l'inseguimento del generatore di rampa.
Figura 7-4
Retroazione del generatore di rampa
Senza retroazione del generatore di rampa
● p1145 = 0
● L'azionamento accelera fino a t2, anche se il riferimento dopo t1 è inferiore al valore
attuale
Con retroazione del generatore di rampa
● Con p1145 > 1 (i valori compresi tra 0 e 1 non sono logici) la retroazione del generatore
di rampa viene attivata con l'attivazione della limitazione di coppia. In questo modo
l'uscita del generatore di rampa supera il valore attuale del numero di giri solo dello
scostamento parametrizzato in p1145.
● t1 e t2 sono quasi identici
Convertitori da incasso
290
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.2 Canale del valore di riferimento
Schema logico
FP 3060
Generatore di rampa semplice
FP 3070
Generatore di rampa esteso
FP 3080
Selezione generatore di rampa, parola di stato, inseguimento
• r1119
CO: Generatore di rampa, valore di riferimento all'ingresso
• p1120
Generatore di rampa, tempo di accelerazione
• p1121
Generatore di rampa, tempo di decelerazione
• p1130
Generatore di rampa, tempo di arrotondamento iniziale
• p1131
Generatore di rampa, tempo di arrotondamento finale
• p1134
Generatore di rampa, tipo di arrotondamento
• p1135
OFF3 Tempo di decelerazione
• p1136
OFF3 Tempo di arrotondamento iniziale
• p1137
Tempo di arrotondamento finale OFF3
• p1138
CI: Generatore di rampa, scalatura tempo di accelerazione
• p1139
CI: Generatore di rampa, scalatura tempo di decelerazione
• p1140
BI: Abilitazione generatore di rampa/blocco generatore di rampa
• p1141
BI: Continuazione generatore di rampa/congelamento generatore di rampa
• p1142
BI: Abilitazione/blocco del valore di riferimento
• p1143
BI: Accettare valore impostato generatore di rampa
• p1144
CI: Generatore di rampa, valore impostato
• p1145
Retroazione generatore di rampa, intensità
• p1148
Generatore di rampa, tolleranza attiva per accelerazione e decelerazione
• r1149
CO: Generatore di rampa, accelerazione
• r1150
Generatore di rampa, valore di riferimento numero di giri all'uscita
• p1151
CO: Configurazione generatore di rampa
Parametri
• r1199.0...8 Generatore di rampa, parola di stato
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
291
Canale del valore di riferimento e regolazione
7.3 Controllo V/f
7.3
Controllo V/f
Descrizione
La soluzione più semplice di un processo di controllo è rappresentata dalla curva
caratteristica U/f. Qui la tensione dello statore del motore asincrono o del motore sincrono
viene controllata proporzionalmente alla frequenza dello statore. Questa procedura si è
rivelata valida per un'ampia serie di applicazioni senza elevate esigenze dinamiche, quali:
● pompe e ventilatori
● azionamenti di nastri trasportatori
● azionamenti di più motori
Lo scopo del controllo U/f consiste nel mantenere costante il flusso Φ nel motore. Questo
flusso è proporzionale alla corrente di magnetizzazione Iµ o al rapporto tra tensione V e
frequenza f.
Φ ~ Iµ ~ U/f
La coppia M sviluppata dai motori asincroni è a sua volta proporzionale al prodotto (o per
meglio dire al prodotto vettoriale Φ x I) di flusso e corrente.
M∼ΦxI
Per generare la coppia più elevata possibile per una data corrente, il motore deve lavorare
con un flusso costante e quanto più elevato. Per mantenere costante il flusso Φ, in caso di
variazione della frequenza f deve essere modificata proporzionalmente anche la tensione in
modo da avere un flusso di corrente di magnetizzazione Iµ costante. Da queste basi deriva il
controllo della curva caratteristica U/f.
Il campo di deflussaggio si trova al di sopra della frequenza nominale del motore dove è
raggiunta la tensione massima. Il flusso e il valore di coppia massimo diminuiscono
all'aumentare della frequenza, come illustrato nella seguente figura.
Figura 7-5
Aree operative e andamenti della curva caratteristica del motore asincrono in caso di
alimentazione del convertitore
Esistono vari tipi di curva caratteristica U/f, rappresentati nella tabella seguente.
Convertitori da incasso
292
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.3 Controllo V/f
Tabella 7- 1
p1300 Caratteristiche U/f
Valore
parametro
Significato
Impiego/proprietà
0
Caratteristica lineare
Caso standard con aumento di tensione
impostabile
1
Caratteristica lineare
con flux current
control (FCC)
Curva caratteristica che compensa le perdite
di tensione della resistenza dello statore in
caso di carichi statici / dinamici (flux current
control FCC).
Si rivela utile in particolare per motori piccoli,
poiché questi hanno una resistenza dello
statore relativamente elevata.
2
Caratteristica
parabolica
Curva caratteristica che tiene conto
dell'andamento della coppia del motore (ad
es. ventilatore / pompa).
•
Caratteristica quadratica (caratteristica
f²)
•
Risparmio energetico poiché la bassa
tensione comporta anche correnti e
perdite minori.
3
Caratteristica
programmabile
Caratteristica che tiene conto
dell'andamento della coppia motore /
macchina.
4
Caratteristica lineare
ed ECO
Caratteristica (vedere valore parametro 0) ed Eco-Mode con punto di lavoro costante.
•
Con punto di lavoro costante, il rendimento è ottimizzato variando la tensione.
•
Qui è necessaria una compensazione attiva dello scorrimento, mentre il fattore di
scala va impostato in maniera da compensare completamente lo scorrimento
(p1335 = 100 %).
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
293
Canale del valore di riferimento e regolazione
7.3 Controllo V/f
Valore
parametro
5
6
Significato
Azionamenti a
frequenza precisa
(settore tessile)
Azionamenti a
frequenza precisa
con flux current
control (FCC)
Impiego/proprietà
Curva caratteristica (vedere il valore del parametro 0) che tiene conto della
peculiarità tecnologica di un'applicazione (ad es. applicazioni tessili).
•
La limitazione di corrente (regolatore Imax) influisce solo sulla tensione di uscita e
non sulla frequenza di uscita.
•
La compensazione dello scorrimento e l'attenuazione delle risonanze vengono
bloccate.
Curva caratteristica (vedere il valore del parametro 1) che tiene conto della
peculiarità tecnologica di un'applicazione (ad es. applicazioni tessili).
•
La limitazione di corrente (regolatore Imax) influisce solo sulla tensione di uscita e
non sulla frequenza di uscita.
La compensazione dello scorrimento e l'attenuazione delle risonanze vengono
bloccate.
Inoltre vengono compensate le perdite di tensione della resistenza dello statore in
caso di carichi statici / dinamici (flux current control, FCC). Si rivela utile in particolare
per motori piccoli, poiché questi hanno una resistenza dello statore relativamente
elevata.
•
7
19
Caratteristica
parabolica ed ECO
Riferimento di
tensione
indipendente
Caratteristica (vedere valore parametro 1) ed Eco-Mode con punto di lavoro costante.
•
Con punto di lavoro costante, il rendimento è ottimizzato variando la tensione.
•
Qui è necessaria una compensazione attiva dello scorrimento, mentre il fattore di
scala va impostato in maniera da compensare completamente lo scorrimento
(p1335 = 100 %).
La tensione di uscita del Power Module può essere impostata dall'utente
indipendentemente dalla frequenza con il parametro BICO p1330 tramite le interfacce
(ad es. ingresso analogico AI0 del TM31 –> p1330 = r4055[0]).
Schema logico
FP 6301
Caratteristica U/f e aumento di tensione
• p1300
Modalità operativa di controllo/regolazione
• p1320
Controllo U/f, curva caratteristica programmabile, frequenza 1
Parametri
...
• p1327
Controllo U/f, curva caratteristica programmabile, tensione 4
• p1330
CI: Controllo U/f Valore di riferimento di tensione indipendente
• p1331
Limitazione della tensione
• p1333
Controllo U/f frequenza iniziale FCC
• r1348
Controllo U/f, valore attuale fattore Eco
• p1350
Controllo U/f, avviamento dolce
Convertitori da incasso
294
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.3 Controllo V/f
7.3.1
Aumento di tensione
Descrizione
A frequenze di uscita basse le curve caratteristiche U/f forniscono solo una bassa tensione
di uscita.
Alle basse frequenze le resistenze ohmiche dell'avvolgimento dello statore si manifestano e
non possono più essere trascurate rispetto alla reattanza della macchina, ovvero alle basse
frequenze il flusso magnetico non è più proporzionale alla corrente di magnetizzazione o al
rapporto U/f.
Pertanto la tensione di uscita può essere troppo bassa per:
● realizzare la magnetizzazione del motore asincrono,
● mantenere il carico,
● compensare le cadute di tensione (perdite ohmiche nelle resistenze degli avvolgimenti)
nel sistema,
● applicare una coppia di spunto / accelerazione / frenatura.
È possibile scegliere se l'aumento di tensione deve agire in modo permanente (p1310) o
durante l'accelerazione (p1311). Inoltre, tramite p1312, si può impostare un boost di tensione
unico al primo avviamento dopo l'abilitazione impulsi.
Figura 7-6
Aumento di tensione totale
Nota
Effetto dell'aumento di tensione
Il boost di tensione si ripercuote su tutte le curve caratteristiche U/f (p1300) da 0 a 7.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
295
Canale del valore di riferimento e regolazione
7.3 Controllo V/f
Nota
Evitare il sovraccarico termico
Un valore troppo elevato dell'aumento di tensione può provocare un sovraccarico termico
dell'avvolgimento del motore.
Aumento di tensione permanente (p1310)
Il boost di tensione è attivo su tutto il campo di frequenza fino alla frequenza nominale fn, ma
il valore diminuisce continuamente a frequenze più alte.
Figura 7-7
Aumento di tensione permanente (esempio: p1300 = 0, p1310 >0, p1311 = p1312 = 0)
Convertitori da incasso
296
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.3 Controllo V/f
Aumento di tensione all'accelerazione (p1311)
Il boost di tensione agisce solo durante un'accelerazione e solamente fino al raggiungimento
del valore di riferimento.
Esso agisce solo in presenza del segnale "Avvio attivo" (r1199.0 = 1).
Tramite il parametro r0056.6 si può sorvegliare se durante l'accelerazione è attivo il boost di
tensione.
Figura 7-8
Aumento di tensione all'accelerazione (esempio: p1300 = 0, p1310 = 0, p1311 > 0)
Boost di tensione all'avvio (p1312)
Il boost di tensione agisce solo durante la prima accelerazione dopo l'abilitazione impulsi e
solamente fino al raggiungimento del valore di riferimento.
Esso agisce solo in presenza del segnale "Avvio attivo" (r1199.0 = 1).
Tramite il parametro r0056.5 si può sorvegliare se durante l'avvio è attivo il boost di tensione.
Schema logico
FP 6300
Caratteristica U/f e aumento di tensione
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
297
Canale del valore di riferimento e regolazione
7.3 Controllo V/f
Parametri
7.3.2
• r0056.5
Boost di tensione all'avvio attivato/disattivato
• r0056.6
Boost di tensione attivato/disattivato
• p0304
Tensione nominale del motore
• p0305
Corrente nominale del motore
• r0395
Resistenza statore attuale
• p1310
Corrente di avviamento (boost di tensione) permanente
• p1311
Corrente di avviamento (boost di tensione) all'accelerazione
• p1312
Corrente di avviamento (boost di tensione) all'avviamento
• r1315
Aumento di tensione totale
Smorzamento risonanza
Descrizione
Lo smorzamento della risonanza attenua le oscillazioni della corrente attiva che si
manifestano spesso nel funzionamento a vuoto.
Lo smorzamento della risonanza è attivo in un campo che inizia approssimativamente al 6 %
della frequenza nominale del motore (p0310). La frequenza di disinserzione è definita
tramite p1349.
Con p1300 = 5 e 6 (settore tessile) lo smorzamento della risonanza viene disattivato
internamente per poter impostare esattamente la frequenza di uscita.
Figura 7-9
Smorzamento della risonanza
Convertitori da incasso
298
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.3 Controllo V/f
Nota
Impostazione automatica
Per p1349 = 0 il limite di commutazione è impostato automaticamente al 95 % della
frequenza nominale del motore, ma non supera i 45 Hz.
Schema logico
FP 6310
Smorzamento risonanza e compensazione scorrimento
• r0066
Frequenza di uscita
• r0078
Valore attuale di corrente formante la coppia
• p1338
Comando U/f, smorzamento della risonanza, guadagno
• p1339
Comando U/f, smorzamento della risonanza, costante tempo filtro
• p1349
Comando U/f, smorzamento della risonanza, frequenza massima
Parametri
7.3.3
Compensazione dello scorrimento
Descrizione
La compensazione dello scorrimento consente di mantenere in gran parte costante il numero
di giri di motori asincroni indipendentemente dal carico (M1 o M2).
In caso di aumento del carico da M1 a M2, la frequenza di riferimento viene automaticamente
aumentata per mantenere costante la frequenza e quindi il numero di giri del motore.
Analogamente, in caso di diminuzione del carico da M2 a M1, la frequenza di riferimento
viene automaticamente ridotta.
Con p1300 = 4 e 7 (controllori U/f con ECO) occorre attivare la compensazione dello
scorrimento per garantire un funzionamento corretto.
Con p1300 = 5 e 6 (settore tessile) la compensazione dello scorrimento viene disattivata
internamente per poter impostare esattamente la frequenza di uscita.
Se si utilizza un freno di stazionamento motore, si può impostare con p1351 un valore
predefinito all'uscita della compensazione dello scorrimento. Impostando il parametro p1351
> 0 si attiva automaticamente la compensazione di scorrimento (p1335 = 100 %).
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
299
Canale del valore di riferimento e regolazione
7.3 Controllo V/f
Figura 7-10
Compensazione dello scorrimento
Schema logico
FP 6310
Smorzamento risonanza e compensazione scorrimento
• r0330
Scorrimento nominale del motore
• p1334
Frequenza iniziale compensazione dello scorrimento
• p1335
Compensazione dello scorrimento, scalatura
Parametri
p1335 = 0,0 %: compensazione dello scorrimento disattivata.
p1335 = 100,0 %: lo scorrimento è completamente compensato.
• p1336
Compensazione dello scorrimento, valore limite
• r1337
CO: Compensazione dello scorrimento, valore attuale
• p1351
CO: Frequenza iniziale del freno di stazionamento del motore
Convertitori da incasso
300
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
7.4
Regolazione vettoriale di numero di giri/coppia con/senza encoder
Descrizione
La regolazione vettoriale presenta i seguenti vantaggi rispetto al controllo U/f:
● Stabilità in caso di variazioni di carico e valore di riferimento
● Tempi di regolazione brevi in caso di variazioni del valore di riferimento (–> migliore
comportamento di controllo)
● Tempi di regolazione brevi in caso di variazioni di carico (–> migliore comportamento di
reazione ai disturbi)
● Accelerazione e frenatura possibili con coppia massima impostabile
● Protezione del motore grazie a limitazione della coppia impostabile in caso di
funzionamento motorico e anche generatorico
● Regolazione della coppia di azionamento e frenatura indipendentemente dal numero di
giri
● Piena coppia di spunto possibile con numero di giri 0
Questi vantaggi vengono raggiunti già senza retroazione di numero di giri.
La regolazione vettoriale può essere utilizzata sia con che senza encoder del numero di giri.
I criteri elencati di seguito indicano quali sono i casi nei quali è richiesto un encoder per il
valore attuale del numero di giri:
● Massimi requisiti di precisione di numero di giri
● Massimi requisiti di dinamica
– Miglior comportamento di controllo
– Tempi di regolazione rapidi in caso di influssi di grandezze di disturbo
● Regolazione della coppia nel campo di regolazione maggiore di 1:10
● Mantenimento di una coppia definita e/o variabile in caso di velocità inferiori del 10 %
circa della frequenza nominale del motore p0310
● Generalmente un regolatore di velocità è necessario nelle applicazioni in cui una velocità
sconosciuta può provocare un rischio per la sicurezza (pericolo di caduta di un carico, ad
es. per dispositivi di sollevamento, ascensori, ...).
Per quanto riguarda l'impostazione del riferimento, la regolazione vettoriale è suddivisa in:
● Regolazione del numero di giri
● Regolazione di coppia/regolazione di corrente (in breve: regolazione della coppia)
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
301
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
7.4.1
Descrizione
Regolazione vettoriale senza encoder
Nella regolazione vettoriale senza encoder (SLVC: Sensorless Vector Control) la posizione
del flusso o la velocità reale deve essere calcolata mediante il modello di motore elettrico. Il
modello viene supportato dalle correnti o tensioni accessibili. In caso di frequenze ridotte (di
circa 1 Hz) il modello non è in grado di calcolare la velocità.
Per questo motivo e a causa di incertezze nei parametri del modello o nelle precisioni di
misura, in questo campo si passa dal funzionamento regolato al funzionamento controllato.
La commutazione tra funzionamento regolato e controllato viene gestita dalle condizioni di
tempo e frequenza (p1755, p1756, p1758 solo per i motori asincroni). La condizione di
tempo non viene attesa se la frequenza di riferimento all'ingresso del generatore di rampa e
la frequenza reale si trovano contemporaneamente al di sotto di p1755 x (1 - (p1756 / 100
%)).
Il passaggio da funzionamento controllato a regolato avviene comunque in caso di
superamento del numero di giri di commutazione in p1755 (curva "1" nella figura seguente).
Se l'aumento del numero di giri è impostato molto lento e se in p1759 è impostato un tempo
di attesa di commutazione >0, il passaggio avviene una volta trascorso il tempo di attesa di
commutazione (curva "2" nella figura seguente).
Figura 7-11
Condizioni di commutazione
Impostazione del valore di riferimento della coppia
Nel funzionamento controllato il valore attuale del numero di giri calcolato è identico al valore
di riferimento. Per carichi sospesi o processi di accelerazione i parametri p1610 (valore di
riferimento di coppia statico) o p1611 (coppia aggiuntiva di accelerazione) devono essere
adattati alla coppia massima richiesta per applicare la coppia di carico statica o dinamica
dell'azionamento. Se nei motori asincroni p1610 viene impostato a 0 %, viene applicata solo
la corrente di magnetizzazione r0331 con un valore di 100 % della corrente nominale del
motore p0305.
Nei motori sincroni ad eccitazione permanente con p1610 = 0 % permane un valore di
corrente di precomando derivato dalla coppia aggiuntiva r1515, anziché la corrente di
magnetizzazione nei motori asincroni. Per evitare lo stallo dell'azionamento durante
Convertitori da incasso
302
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
l'accelerazione, si può aumentare p1611 oppure utilizzare il precomando di accelerazione
per il regolatore di velocità. Questo permette anche di non sovraccaricare termicamente il
motore in caso di velocità ridotte.
Se il momento di inerzia dell'azionamento è quasi costante, il precomando di accelerazione
tramite p1496 è più vantaggioso della coppia aggiuntiva di accelerazione con p1611. Il
momento di inerzia dell'azionamento viene calcolato con la misura in rotazione tramite
p1900 = 3 e p1960 = 1.
La regolazione vettoriale senza encoder del valore attuale di velocità possiede le
caratteristiche seguenti nel campo delle basse frequenze:
● Funzionamento regolato per carichi passivi fino a una frequenza di uscita di circa 0 Hz
(p0500 = 2), con p1750.2 = 1 e p1750.3 = 1).
● Avviamento di un motore asincrono nel funzionamento regolato (dopo l'eccitazione
completa del motore), se il valore di riferimento del numero di giri a monte del generatore
di rampa è superiore a p1755.
● L'inversione senza commutazione al funzionamento controllato è possibile se il campo
del numero di giri di commutazione (p1755) viene percorso in un periodo di tempo più
breve del tempo di commutazione (p1758) e il valore di riferimento del numero di giri a
monte del generatore di rampa si trova al di fuori del campo del numero di giri controllato
(p1755).
● Nel modo operativo regolazione di coppia, a numeri di giri bassi in linea di massima viene
effettuata la commutazione al funzionamento controllato.
Nota
Presupposti
Per questa eventualità il valore di riferimento del numero di giri a monte del generatore di
rampa deve essere maggiore del numero di giri di commutazione in p1755.
Grazie al funzionamento regolato fino a ca. 0 Hz (impostabile con il parametro p1755) e alla
possibilità di avviamento diretto/inversione diretta a 0 Hz (impostabile con il parametro
p1750), si ottengono i seguenti vantaggi:
● Nessuna necessità di commutazione nell'ambito della regolazione (comportamento
regolare, nessuna variazione brusca di frequenza, nessuna instabilità della coppia)
● Regolazione del numero di giri senza encoder fino a 0 Hz
● Carichi passivi con frequenza 0 Hz
● Possibilità di regolazione stazionaria del numero di giri fino a circa 0 Hz
● Dinamica maggiore rispetto al funzionamento controllato
Nota
Commutazione automatica
Se nel funzionamento regolato l'avvio da 0 Hz o l'inversione dura più a lungo di 2 s o del
valore impostato in p1758, avviene automaticamente la commutazione dal funzionamento
regolato al funzionamento controllato.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
303
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Nota
Funzionamento in regolazione di coppia senza encoder
Il funzionamento in regolazione di coppia senza encoder è conveniente solo se nel campo
del numero di giri al di sotto del numero di giri di commutazione del modello motore (p1755)
la coppia di riferimento è superiore alla coppia di carico. L'azionamento deve poter seguire la
preimpostazione del valore di riferimento e il numero di giri di riferimento che ne deriva
(p1499).
Funzionamento regolato stazionario fino al fermo per carichi passivi
Con la limitazione al carico passivo nel punto di accostamento è possibile ai motori asincroni
mantenere il funzionamento regolato in modo stazionario sino al punto della frequenza zero
(fermo) senza passare al funzionamento regolato.
Per far ciò occorre impostare il parametro p1750.2 = 1.
La regolazione senza commutazione si limita alle applicazioni con carico passivo:
Vi rientrano le applicazioni in cui il carico non genera una coppia generatorica in partenza e il
motore stesso si arresta in caso di blocco impulsi, ad es. masse inerti, freni, pompe,
ventilatori, centrifughe, estrusori, ....
È possibile un fermo di qualsiasi durata senza corrente di ritenuta, viene applicata solo la
corrente di magnetizzazione del motore.
Il funzionamento generatorico stazionario ad una frequenza prossima a 0 Hz non è possibile.
La regolazione senza encoder per carichi passivi può essere già selezionata al momento
della messa in servizio tramite p0500 = 2 (applicazione tecnologica = carichi passivi (per
regolazione senza encoder fino a f = 0)).
L'attivazione della funzione avviene quindi automaticamente quando si esce dalla messa in
servizio rapida con p3900 > 0 o si richiama il calcolo automatico (p0340 = 1, 3, 5 o p0578 =
1).
Azionamenti bloccanti
Se la coppia di carico è superiore alla limitazione di coppia della regolazione vettoriale senza
encoder, l'azionamento viene frenato fino al fermo. Per evitare che dopo il tempo p1758
avvenga la commutazione al funzionamento controllato, è possibile impostare p1750.6 = 1.
In determinati casi è necessario aumentare l'impostazione p2177(Tempo di ritardo motore
bloccato).
Nota
Eccezione in caso di azionamento in inversione
Se il carico può forzare l'inversione dell'azionamento, non utilizzare questa impostazione.
Convertitori da incasso
304
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Carichi attivi
I carichi attivi che possono provocare l'inversione dell'azionamento, ad. es. i dispositivi di
sollevamento, devono essere riavviati con regolazione del numero di giri. Per fare questo
occorre impostare il bit p1750.6 = 0 (controllato in caso di motore bloccato). Il valore di
riferimento di coppia statico (p1610) deve essere superiore al valore massimo della coppia di
carico.
Nota
Carichi con effetto trainante
Per applicazioni con coppia generatorica elevata a basso numero di giri è possibile
impostare anche p1750.7 = 1. In questo modo vengono innalzati i limiti di commutazione del
numero di giri del modello motore ed è possibile eseguire più rapidamente la commutazione
al funzionamento controllato.
Motori sincroni ad eccitazione permanente
Metodo standard: funzionamento controllato a bassi giri
Per i motori sincroni ad eccitazione permanente tanto l'accostamento quanto l'inversione
avvengono normalmente nel funzionamento controllato. Come numero di giri di
commutazione è preimpostato il 10% e il 5% del numero di giri nominale del motore. La
commutazione avviene senza vincoli di tempo (p1758 non viene valutato). Le coppie di
carico presenti (nel funzionamento come motore o generatore) vengono adattate nel
funzionamento controllato, rendendo possibile una sovrapposizione a coppia costante,
anche con carichi statici elevati, nel funzionamento regolato. Ad ogni nuova abilitazione
impulsi avviene anzitutto l'identificazione della posizione del rotore.
Figura 7-12
Passaggio per lo zero nel funzionamento controllato a bassi giri
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
305
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Metodo esteso: funzionamento regolato fino a giri zero
Sovrapponendo gli impulsi ad alta frequenza alla tensione di prima armonica e all'analisi
degli impulsi che vengono a sovrapporsi alla corrente della macchina è possibile calcolare la
posizione progressiva del rotore fino alla frequenza zero (fermo).
Con motori Torque Siemens della serie 1FW4, 1PH8 si può raggiungere la coppia nominale
da fermo con qualsiasi carico o addirittura tenere il carico da fermo.
Questo metodo si presta particolarmente per i motori con magneti interni.
Nota
Impiego di un filtro sinusoidale
Se si impiega un filtro sinusoidale occorre applicare il metodo controllato.
Mantenere il funzionamento regolato presenta i seguenti vantaggi:
● Non è richiesta una commutazione nell'ambito della regolazione (commutazione senza
scompensi, nessuna instabilità della coppia).
● Regolazione di velocità e coppia senza encoder fino a 0 Hz incluso.
● Dinamica maggiore rispetto al funzionamento controllato.
● Funzionamento senza encoder di gruppi di azionamenti (ad es. industria della carta,
funzionamento master-slave).
● Carichi attivi (e anche sospesi) fino alla frequenza zero.
Condizioni marginali per l'impiego di motori di terze parti:
● L'esperienza ha dimostrato che il metodo per motori con magneti incorporati nel rotore
(IPMSM - Interior Permanent Magnet Synchronous Motors) è ottimale.
● Il rapporto reattanza trasversale dello statore (Lsq) : reattanza longitudinale dello statore
(Lsd) deve essere > 1 (si raccomanda almeno > 1,5).
● I possibili limiti operativi di questo metodo dipendono dal livello di corrente fino al quale
nel motore si mantiene il rapporto di reattanza asimmetrico (Lsq:Lsd). Se il procedimento
deve potersi utilizzare fino alla coppia nominale del motore, il rapporto di reattanza deve
essere preservato fino alla corrente nominale del motore.
Il comportamento ottimale presuppone che vengano impostati i seguenti parametri:
● Immissione della caratteristica di saturazione: p0362 - p0369
● Immissione della caratteristica di carico: p0398, p0399
Sequenza di messa in servizio nel funzionamento regolato fino a giri zero:
● esecuzione della messa in servizio con identificazione motore da fermo.
● Immissione dei parametri per la caratteristica di saturazione e la caratteristica di carico.
● Attivazione del funzionamento regolato fino a giri zero tramite il parametro p1750 bit 5.
Convertitori da incasso
306
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Figura 7-13
Passaggio per lo zero nel funzionamento regolato fino a giri zero
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
307
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Schema logico
FP 6730
Interfaccia con il Motor Module (ASM), p0300 = 1)
FP 6731
Interfaccia con il Motor Module (PEM), p0300 = 2)
• p0305
Corrente nominale del motore
• r0331
Corrente/corrente di cortocircuito di magnetizzazione del motore
• p0362
...
p0365
Caratteristica di saturazione flusso 1
...
Caratteristica di saturazione flusso 4
• p0366
...
p0369
Caratteristica di saturazione I_mag 1
...
Caratteristica di saturazione I_mag 4
• p0398
Angolo disaccoppiam. magnetico (saturazione incrociata) coeff. 1
• p0398
Angolo disaccoppiam. magnetico (saturazione incrociata) coeff. 3
• p0500
Applicazione tecnologica
• p0578
Calcolo parametri in funzione di tecnologia/unità
• p1605
Metodo a impulsi, configurazione dello schema
• r1606
CO: Metodo a impulsi, schema attuale
• p1607
Metodo a impulsi, stimolo
• r1608
CO: Metodo a impulsi, risposta
• p1610
Valore di riferimento statico della coppia (SLVC)
• p1611
Coppia aggiuntiva di accelerazione (SLVC)
• p1750
Modello di motore, configurazione
• p1755
Modello di motore, numero di giri di commutazione, funzionamento senza
encoder
• p1756
Modello di motore, numero di giri di commutazione, isteresi
• p1758
Modello di motore, tempo di attesa di commutazione regolato controllato
• p1759
Modello di motore, tempo di attesa di commutazione controllato regolato
• r1762.1
Modello di motore, scostamento componente 1 - Scostamento Modello2
• p1798
Modello motore metodo impulsi adattamento numero di giri Kp
• p1810.3
Configurazione modulatore - Misura corrente oversampling attivato (per
metodo a impulsi PESM)
Parametri
Convertitori da incasso
308
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
7.4.2
Regolazione vettoriale con encoder
Descrizione
Vantaggi della regolazione vettoriale con encoder:
● Regolazione del del numero di giri fino a 0 Hz (quindi fino alla condizione di fermo).
● Comportamento di regolazione stabile nell'intero campo del numero di giri.
● Mantenimento di una coppia definita e/o variabile a numeri di giri inferiori del 10% circa
rispetto al numero di giri nominale del motore.
● Rispetto alla regolazione del numero di giri senza encoder, la dinamica è notevolmente
superiore per gli azionamenti con encoder in quanto il numero di giri viene misurato
direttamente e confluisce nella formazione del modello delle componenti di corrente.
Cambiamento del modello motore
All'interno della gamma del numero di giri p1752 x (100 % - p1753) e p1752 ha luogo un
cambio di modello tra il modello di corrente e il modello osservatore. Nell'ambito del modello
di corrente, ossia a velocità di rotazione più basse, la precisione della coppia dipende dal
corretto inseguimento della temperatura della resistenza del rotore. Nell'ambito del modello
osservatore e a velocità di rotazione inferiori a circa il 20 % del numero di giri nominale, la
precisione della coppia dipende principalmente dal corretto inseguimento della temperatura
della resistenza dello statore. Se la resistenza dei cavi della linea di alimentazione ammonta
a oltre il 20 - 30 % della resistenza complessiva, dovrebbe essere registrata
dall'identificazione dati del motore (p1900/p1910) in p0352.
Tramite p0620 = 0 è possibile disinserire l'adattamento termico. Questo può rendersi
necessario se l'adattamento non può funzionare in modo sufficientemente preciso in ragione
delle seguenti condizioni generali. Tale situazione può verificarsi ad es. se non si utilizza un
sensore KTY per il rilevamento della temperatura e le temperature ambiente oscillano
notevolmente o se le sovratemperature del motore (p0626 ... p0628) si discostano
parecchio, a causa della sua costruzione, dalle preimpostazioni.
Schema logico
FP 4715
Rilevamento valore attuale numero di giri e posizione dei poli encoder motore
FP 6030
Valore di riferimento del numero di giri, statica
FP 6040
Regolatore del numero di giri con/senza encoder
FP 6050
Adattamento del regolatore del numero di giri (adattamento Kp_n/Tn_n)
FP 6060
Valore di riferimento della coppia
FP 6490
Configurazione regolazione numero di giri
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
309
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
7.4.3
Filtro del valore attuale del numero di giri
Descrizione
Il filtro del valore attuale del numero di giri consente di sopprimere le grandezze di disturbo
attuali nel rilevamento del numero di giri.
Il filtro del valore attuale del numero di giri può essere impostato nel seguente modo:
● Filtro passabasso di 2° ordine (PT2: -40 dB/decade)
● Filtro generale 2° ordine
Il filtro arrestabanda e il filtro passabasso con abbassamento vengono convertiti tramite
STARTER nei parametri del filtro generale di 2° ordine.
Il filtro del valore attuale del numero di giri viene attivato tramite p1656.4 = 1. Con p1677 ...
p1681 si impostano le proprietà del filtro del valore attuale del numero di giri.
Se vengono effettuate modifiche ai dati del filtro del valore attuale del numero di giri, è
possibile evitare la conversione dei nuovi dati del filtro tramite p1699 = 1.
Con l'impostazione p1699 = 0 si esegue il calcolo e si applicano i nuovi valori.
Nota
Per la regolazione vettoriale esistono 2 filtri del valore di riferimento di corrente e un filtro del
valore attuale del numero di giri. Il filtro del valore attuale del numero di giri ha il numero "5".
Schemi logici
FP 4715
Valutazione encoder - rilevamento valore attuale del numero di giri e posizione
dei poli, encoder motore (encoder 1), n_ist_filter5
• p1655[4]
CI: Filtro del valore attuale numero di giri 5 tuning frequenza intrinseca
• p1656.4
Filtro del valore attuale del numero di giri 5, attivazione
• p1677
Filtro del valore attuale del numero di giri 5, tipo
• p1678
Filtro del valore attuale del numero di giri 5, frequenza intrinseca
denominatore
• p1679
Filtro del valore attuale del numero di giri 5, attenuazione denominatore
• p1680
Filtro del valore attuale del numero di giri 5, frequenza intrinseca numeratore
• p1681
Filtro del valore attuale del numero di giri 5, attenuazione numeratore
• p1699
Filtro, acquisizione dati
Parametri
Convertitori da incasso
310
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
7.4.4
Regolatore del numero di giri
Descrizione
Entrambi i processi di regolazione, con e senza encoder (VC, SLVC), possiedono la stessa
struttura di regolazione della velocità, contenente i seguenti componenti essenziali:
● Regolatore PI
● Precomando del regolatore di velocità
● Statica
La somma delle grandezze di uscita costituisce il valore di riferimento di coppia, che viene
ridotto al valore consentito dalla funzione di limitazione del riferimento di coppia.
Il regolatore di velocità riceve il suo valore di riferimento (r0062) dal canale del valore di
riferimento, il valore attuale (r0063) direttamente dall'encoder del valore attuale del numero
di giri in caso di regolazione del numero di giri con encoder (VC) o indirettamente tramite il
modello del motore in caso di regolazione del numero di giri senza encoder (SLVC). La
differenza di regolazione viene amplificata dal regolatore PI e forma, insieme al precomando,
il valore di riferimento di coppia.
Con l'aumento della coppia di carico e la funzione statica attiva, il riferimento di velocità
viene ridotto proporzionalmente e di conseguenza l'azionamento singolo nell'ambito di un
gruppo (due o più motori accoppiati meccanicamente) viene scaricato in caso di coppia
troppo elevata.
Figura 7-14
Regolatore di velocità
L'impostazione ottimale del regolatore di velocità può essere rilevata mediante
l'ottimizzazione automatica dello stesso (p1900 = 1, misura in rotazione).
Se il momento di inerzia è stato impostato, è possibile calcolare il regolatore di velocità (Kp,
Tn) con la parametrizzazione automatica (p0340 = 4). I parametri di regolazione vengono
determinati nel seguente modo in base al valore ottimale simmetrico:
Tn = 4 x Ts
Kp = 0,5 x r0345 / Ts = 2 x r0345 / Tn
Ts = somma dei tempi di ritardo brevi (comprende p1442 oppure p1452)
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
311
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Se questa impostazione dovesse dare luogo a vibrazioni, il guadagno del regolatore di
velocità (Kp) deve essere ridotto manualmente. È anche possibile aumentare il livellamento
del valore attuale di velocità (generalmente in caso di gioco del riduttore o vibrazioni
torsionali ad alta frequenza) ed eseguire nuovamente il calcolo del regolatore, in quanto il
valore confluisce nel calcolo di Kp e Tn.
Per l'ottimizzazione valgono le seguenti relazioni:
● Incrementando Kp il regolatore diventa più veloce e la sovraoscillazione aumenta. I picchi
di segnale e le oscillazioni nel circuito di regolazione del numero di giri vengono però
incrementati.
● In caso di diminuzione di Tn, il regolatore diventa anche in questo caso più veloce. La
sovraelongazione viene tuttavia amplificata.
Per l'impostazione manuale della regolazione del numero di giri, il modo più semplice
consiste nel determinare dapprima la dinamica tramite Kp (e il livellamento del valore attuale
del numero di giri) e quindi ridurre il più possibile il tempo dell'azione integratrice. Accertarsi
che la regolazione rimanga costante anche nel campo di deflussaggio.
In caso di oscillazioni nella regolazione del numero di giri, di solito è sufficiente un aumento
del tempo di livellamento in p1452 per funzionamento senza encoder o p1442 per
funzionamento con encoder, oppure una riduzione del guadagno del regolatore per
attenuare le oscillazioni.
È possibile sorvegliare l'uscita integrale del regolatore di velocità tramite r1482 e l'uscita
limitata del regolatore tramite r1508 (riferimento di coppia).
Nota
Dinamica ridotta nel funzionamento senza encoder
Rispetto alla regolazione del numero di giri con encoder, la dinamica è notevolmente ridotta
per gli azionamenti senza encoder. Il numero di giri attuale viene ricavato da un calcolo di
modello tratto dalle grandezze di uscita del convertitore per la corrente e la tensione,
caricate dai livelli di disturbo. A questo scopo, il numero di giri attuale deve essere corretto
nel software da algoritmi di filtraggio.
Schema logico
FP 6040
Regolatore del numero di giri con/senza encoder
• r0062
CO: Valore di riferimento del numero di giri dopo il filtro
• r0063
CO: Valore attuale del numero di giri livellato
• p0340
Calcolo automatico dei parametri di motore/regolazione
• r0345
Tempo di avviamento nominale del motore
• p1442
Regolatore di velocità, valore attuale del numero di giri, tempo di livellamento
• p1452
Regolatore n.giri, val. attuale n.giri, tempo liv. (senza enc.)
Parametri
Convertitori da incasso
312
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
• p1460
Regolatore di velocità, guadagno P con encoder
• p1462
Regolatore di velocità, tempo dell'azione integratrice con encoder
• p1470
Regolatore di velocità, funzionamento senza encoder, guadagno P
• p1472
Regolatore del numero di giri, funzionamento senza encoder, tempo
dell'azione integratrice
• r1482
CO: Regolatore del numero di giri, uscita coppia I
• r1508
CO: Valore di riferimento della coppia prima della coppia aggiuntiva
• p1960
Selezione misura in rotazione
Esempi di impostazioni del regolatore del numero di giri
Di seguito sono forniti alcuni valori di esempio per le impostazioni del regolatore del numero
di giri nella regolazione vettoriale senza encoder (p1300 = 20). Questi valori non devono
essere considerati come se fossero sempre validi, ma devono essere verificati tenendo
conto del comportamento desiderato del regolatore.
● Ventilatori (grandi masse centrifughe) e pompe
Kp (p1470) = 2 … 10
Tn (p1472) = 250 … 500 ms
L'impostazione Kp = 2 e Tn = 500 ms provoca un avvicinamento asintotico del numero di
giri attuale al numero di giri di riferimento dopo un salto del valore. Ciò è sufficiente in
molti processi di regolazione semplici per pompe e ventilatori.
● Mulini a macina, vagliatrici (grandi masse centrifughe)
Kp (p1470) = 12 … 20
Tn (p1472) = 500 … 1000 ms
● Azionamenti per impastatrici
Kp (p1470) = 10
Tn (p1472) = 200 … 400 ms
Nota
Controllo del guadagno del regolatore di velocità
Si consiglia di controllare il guadagno del regolatore di velocità attivo (r1468) durante il
funzionamento. Se questo valore cambia durante il funzionamento, significa che è
attivato l'adattamento Kp (p1400.5 = 1). Se necessario è possibile disattivare
l'adattamento Kp o modificarne il comportamento.
● Funzionamento con encoder (p1300 = 21)
Un valore di livellamento del valore attuale del numero di giri (p1442) = 5 … 20 ms
consente un funzionamento più silenzioso dei motori con riduttore.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
313
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
7.4.4.1
Precomando del regolatore del numero di giri (precomando integrato con
simmetrizzazione)
Descrizione
Il comportamento di controllo del circuito di regolazione di velocità può essere migliorato se
la coppia di accelerazione viene calcolata dal valore di riferimento della velocità e inserita a
monte del regolatore del n. di giri. Questo valore di riferimento della coppia mv viene
commutato/precomandato direttamente sul regolatore di corrente mediante elementi di
interfaccia (abilitazione mediante p1496) come grandezza di comando aggiuntiva.
Il valore di riferimento della coppia mv si ricava da:
mv = p1496 x J x (dn/dt) = p1496 x p0341 x p0342 x (dn/dt)
La coppia di inerzia del motore p0341 si calcola al momento della messa in servizio. Il fattore
p0342 tra il momento di inerzia totale J e il momento di inerzia motore si determinano
manualmente o tramite ottimizzazione del regolatore del n. di giri.. L'accelerazione si calcola
dalla differenza del numero di giri lungo il tempo dn/dt.
Nota
Con applicazione dell'ottimizzazione del regolatore del numero di giri
Applicando l'ottimizzazione del regolatore del n. di giri si determina il momento di inerzia
totale/motore (p0342), inoltre la scala del precomando di accelerazione (p1496) viene
impostata su 100%.
Se p1400.2 = p1400.3 = 0, allora si imposta automaticamente la simmetrizzazione dei
precomandi.
Figura 7-15
Regolatore del n. di giri con precomando
Convertitori da incasso
314
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Se l'adattamento è stato eseguito in modo corretto, il regolatore del n. di giri dovrà solo
livellare le grandezze di disturbo nel proprio circuito di regolazione e ottenere ciò mediante
modifica relativamente modesta delle grandezze di regolazione.
Mediante il fattore di valutazione p1496 è possibile adeguare in base all'applicazione l'effetto
della grandezza di precomando. Con p1496 = 100% viene calcolato il precomando in base
al momento di inerzia del motore e del carico (p0341, p0342). Per evitare che il regolatore
del n. di giri agisca contro il valore di riferimento di coppia fornito, interviene
automaticamente un filtro di simmetria. La costante di tempo del filtro di simmetria
corrisponde al ritardo equivalente del circuito di regolazione di velocità. Il precomando del
regolatore del n. di giri è impostato correttamente (p1496 = 100%, calibratura mediante
p0342) quando la componente I del regolatore del n. di giri (r1482) resta invariata nel campo
di valori n > 20 % x p0310 durante un'accelerazione o una decelerazione. Mediante il
precomando è quindi possibile avvicinare un nuovo valore di riferimento del numero di giri
senza sovraregolazione (condizione: non deve intervenire la limitazione di coppia e il
momento d'inerzia deve rimanere costante).
Se il regolatore del n. di giri viene provvisto di precomando, il valore di riferimento del
numero di giri (r0062) viene influenzato con lo stesso livellamento (p1442 o p1452) del
valore reale (r1445). Ciò garantisce che nelle fasi di accelerazione non si formi una
differenza di regolazione (r0064) all'ingresso del regolatore che sarebbe condizionata
solamente dal tempo di transito del segnale.
Occorre prestare particolare attenzione nell'attivazione del precomando del numero di giri al
fatto che il valore di riferimento del numero di giri venga impostato in modo livellato oppure
senza un rilevante livello di disturbi (ad evitare sbalzi di coppia). Con il livellamento del
valore di riferimento del numero di giri o l'attivazione degli arrotondamenti del generatore di
rampa p1130 - p1131 è possibile generare un adeguato segnale.
Il tempo di avviamento r0345 (Tavviam.) è una misura del momento di inerzia complessivo J
della macchina e descrive il tempo in cui l'azionamento senza carico può accelerare con la
coppia nominale del motore r0333 (Mmot,nom) da fermo al numero di giri nominale del motore
p0311 (nMot,nom).
r0345 = Tavviam. = J x (2 x π x nMot,nom) / (60 x MMot,nom) = p0341 x p0342 x (2 x π x p0311) /
(60 x r0333)
I tempi di accelerazione e di decelerazione devono sempre essere maggiori del tempo di
avviamento.
Nota
Impostazione del generatore di rampa
In linea di massima, i tempi di accelerazione o decelerazione (p1120; p1121) del generatore
di rampa nel canale del valore di riferimento devono essere ridotti fino al limite che consenta
al numero di giri del motore di seguire il valore di riferimento durante l'accelerazione e la
decelerazione. Ciò garantisce la potenzialità funzionale ottimale del precomando del
regolatore del n. di giri..
Il precomando di accelerazione collegato a un ingresso connettore (p1495) viene attivato
impostando i parametri p1400.2 = 1 e p1400.3 = 0. Per simmetria è possibile impostare
p1428 (tempo morto) e p1429 (costante di tempo).
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
315
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Schema logico
FP 6031
Simmetrizzazione di precomando modello di riferimento/accelerazione
• p0311
Numero di giri nominale del motore
• r0333
Coppia nominale del motore
• p0341
Momento di inerzia del motore
• p0342
Momento di inerzia, rapporto del totale rispetto al motore
• r0345
Tempo di avviamento nominale del motore
• p1400.2
Sorgente precomando accelerazione
• p1428
Precomando del numero di giri, simmetrizzazione tempo morto
• p1429
Precomando del numero di giri, simmetrizzazione costante di tempo
• p1496
Precomando di accelerazione, scalatura
• r1518
Momento di accelerazione
Parametri
Convertitori da incasso
316
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
7.4.4.2
Modello di riferimento
Descrizione
Il modello di riferimento diventa attivo con p1400.3 = 1.
Il modello di riferimento serve a riprodurre il percorso del circuito di regolazione della velocità
con un regolatore di velocità P.
La riproduzione del circuito è impostabile nei parametri da p1433 a p1435. Diventa attiva
quando p1437 è collegato all'uscita del modello r1436.
Il modello di riferimento ritarda lo scostamento valore di riferimento/valore attuale per la
componente integrale del regolatore di velocità, in modo da sopprimere i processi di
assestamento.
Il modello di riferimento può anche essere riprodotto esternamente e il segnale esterno può
essere accoppiato tramite p1437.
Figura 7-16
Modello di riferimento
Schema logico
FP 6031
Simmetrizzazione di precomando modello di riferimento/accelerazione
• p1400.3
Modello di riferimento del valore di riferimento del numero di giri, componente
I
• p1433
Regolatore di velocità, modello di riferimento frequenza intrinseca
• p1434
Regolatore di velocità, modello di riferimento livellamento
• p1435
Regolatore di velocità, modello di riferimento tempo morto
• r1436
Regolatore di velocità, modello di riferimento, uscita valore di riferimento del
numero di giri
• p1437
Regolatore di velocità, modello di riferimento, componente I ingresso
Parametri
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
317
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
7.4.4.3
Adattamento del regolatore del numero di giri
Descrizione
Sono disponibili due possibilità di adattamento, l'adattamento Kp_n libero e l'adattamento
Kp_n/Tn_n dipendente dal numero di giri.
L'adattamento Kp_n libero è attivo anche nel funzionamento senza encoder e serve nel
funzionamento con encoder come fattore aggiuntivo per l'adattamento Kp_n dipendente dal
numero di giri.
L'adattamento Kp_n/Tn_n dipendente dal numero di giri è attivo solo nel funzionamento con
encoder e influenza anche il valore Tn_n.
Figura 7-17
Adattamento KP libero
In caso di funzionamento senza encoder è possibile attivare una riduzione della dinamica nel
campo di deflussaggio (p1400.0). Tale riduzione viene attivata nell'ottimizzazione del
regolatore di velocità per raggiungere una maggiore dinamica nel campo di numeri di giri di
base.
Esempio di adattamento dipendente dal numero di giri
Nota
Solo nel funzionamento con encoder
Questo adattamento è attivo solo nel funzionamento con encoder!
Convertitori da incasso
318
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Figura 7-18
Esempio di adattamento dipendente dal numero di giri
Schema logico
FP 6050
Adattamento del regolatore del numero di giri (adattamento Kp_n/Tn_n)
• p1400.5
Configurazione regolazione numero di giri: Adat Kp-/Tn attivo
• p1400.6
Configurazione regolazione numero di giri: Adattamento Kp-/Tn libero attivo
Parametri
Adattamento Kp_n libero
Regolatore di velocità, guadagno P, segnale di adattamento
• p1455
• p1456
Regolatore di velocità, guadagno P, adattamento punto di inizio inferiore
• p1457
• p1458
Regolatore del numero di giri, guadagno P, adattamento punto di inserimento
superiore
Fattore di adattamento inferiore
• p1459
Fattore di adattamento superiore
• p1470
Regolatore di velocità, funzionamento senza encoder, guadagno P
Adattamento Kp_n/Tn_n dipendente dalla velocità (solo VC)
Regolatore di velocità, guadagno P, numero di giri di adattamento inferiore
• p1460
• p1464
Regolatore del numero di giri Kp, numero di giri di adattamento superiore,
scalatura
Regolatore di velocità, tempo dell'azione integratrice numero di giri di
adattamento inferiore
Regolatore del numero di giri Tn, numero di giri di adattamento superiore,
scalatura
Regolatore di velocità, numero di giri di adattamento inferiore
• p1465
Regolatore di velocità, numero di giri di adattamento superiore
• p1466
Regolatore di velocità, guadagno P, scalatura
• p1461
• p1462
• p1463
Riduzione dinamica, deflussaggio (solo SLVC)
• p1400.0 Configurazione regolazione numero di giri: Adattamento automatico Kp-/Tn attivo
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
319
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
7.4.4.4
Statica
Descrizione
La funzione statica (abilitazione con P1492) comporta una riduzione proporzionale del valore
di riferimento di velocità in funzione dell'incremento della coppia del carico.
La statica ha un'azione limitatrice della coppia se l'azionamento è accoppiato
meccanicamente a un altro numero di giri (ad es. rullo conduttore su un nastro
trasportatore). In combinazione con il valore di riferimento della coppia di un azionamento
pilota con regolazione del numero di giri è possibile realizzare anche una ripartizione del
carico molto efficace che, con le dovute impostazioni, è in grado di gestire persino un
accoppiamento meccanico morbido (a differenza della regolazione della coppia o della
ripartizione del carico con sovracomando e limitazione).
Per gli azionamenti che vengono spesso accelerati e frenati con forti variazioni del numero di
giri, questo metodo è solo parzialmente idoneo.
La decelerazione statica viene impiegata ad es. per applicazioni in cui due o più motori
funzionano accoppiati meccanicamente o su albero comune e soddisfano i requisiti di cui
sopra. Essa limita le differenze di coppia che possono verificarsi a causa dell'accoppiamento
meccanico modificando opportunamente il numero di giri dei singoli motori (l'azionamento
viene alleggerito del carico in caso di coppia troppo elevata).
Figura 7-19
Regolatore del n. di giri con statica
Presupposti
● Tutti gli azionamenti accoppiati devono funzionare in regolazione vettoriale con
regolazione del numero di giri (con o senza encoder)
● Sui generatori di rampa degli azionamenti con accoppiamento meccanico devono essere
applicati gli stessi valori di riferimento, i generatori di rampa devono avere gli stessi tempi
di accelerazione e decelerazione.
Convertitori da incasso
320
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Schema logico
FP 6030
Valore di riferimento del numero di giri, statica
• r0079
Valore di riferimento totale della coppia
• r1482
Regolatore del n. di giri, uscita coppia I
• p1488
Ingresso statica, sorgente
• p1489
Ritorno statica, scalatura
• r1490
Retroazione funzione statica, riduzione del numero di giri
• p1492
Ritorno statica, abilitazione
• r1508
Valore di riferimento della coppia prima della coppia aggiuntiva
Parametri
7.4.4.5
Valore attuale del numero di giri aperto
Descrizione
Tramite il parametro p1440 (CI: Regolatore di velocità, valore attuale del numero di giri)
viene impostata la sorgente del segnale per il valore attuale del numero di giri del regolatore
di velocità. Nell'impostazione di fabbrica è preimpostato come sorgente di segnale il valore
attuale di velocità non livellato r0063[0].
Tramite il parametro p1440, a seconda dell'impianto, si può ad es. attivare un filtro nel
canale del valore attuale o un valore attuale del numero di giri esterno.
Il parametro r1443 consente di visualizzare il valore attuale del numero di giri che si trova in
p1440.
Nota
Immissione di un valore attuale del numero di giri esterno
Se viene fornito un valore attuale del numero di giri esterno è necessario controllare che le
funzioni di sorveglianza vengano ancora prese dal modello di motore.
Comportamento con regolazione di velocità con encoder (p1300 = 21)
Per il segnale di velocità o di posizione del modello di motore deve essere sempre
disponibile un encoder motore (valutazione tramite SMC; vedere p0400). Il numero di giri
attuale del motore (r0061) e le informazioni sulla posizione per i motori sincroni continuano a
provenire da questo encoder motore e non vengono influenzati dall'impostazione in p1440.
Interconnessione di p1440:
Nell'interconnessione dell'ingresso connettore p1440 con un valore attuale del numero di giri
esterno occorre accertarsi che il numero di giri abbia la stessa normazione (p2000).
Il segnale del numero di giri esterno dovrebbe corrispondere in media al numero di giri
dell'encoder motore (r0061).
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
321
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Comportamento con regolazione di velocità senza encoder (p1300 = 20)
A seconda del percorso di trasmissione del segnale di velocità si manifestano dei tempi
morti che vanno considerati nel parametrizzare il regolatore di velocità (p1470, p1472) e che
possono quindi provocare perdite di dinamica.
Per questo è importante ridurre al minimo i tempi di trasmissione dei segnali.
Affinché il regolatore di velocità possa lavorare anche da fermo, si deve impostare p1750.2 =
1 (funzionamento regolato fino a frequenza zero per i carichi passivi). In caso contrario ai
bassi regimi si passa al funzionamento regolato in velocità, in modo da escludere il
regolatore di giri e far sì che il numero di giri attuale misurato non abbia alcun effetto.
Sorveglianza dello scostamento dei giri tra modello motore e numero di giri esterno
Il numero di giri attuale esterno (r1443) viene confrontato con quello del modello motore
(r2169). Se lo scostamento è maggiore della soglia di tolleranza impostata in p3236, una
volta trascorso il tempo di ritardo all'inserzione in p3238 compare l'anomalia F07937
(Azionamento: scostamento numero di giri modello motore rispetto a numero di giri esterno)
e l'azionamento viene disattivato con la reazione impostata (impostazione di fabbrica:
OFF2).
Figura 7-20
Sorveglianza "Scostamento n. giri modello/esterno in tolleranza"
Schema logico
FP 6040
Regolazione vettoriale – Regolatore di velocità con/senza encoder
FP 8012
Segnali e funzione di sorveglianza – Segnalazioni relative alla coppia, motore
bloccato/danneggiato
Convertitori da incasso
322
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Parametri
7.4.5
• r0063[0]
Valore attuale del numero di giri non livellato
• p1440
CI: Regolatore di velocità, valore attuale di velocità
• p1442
Regolatore di velocità, valore attuale del numero di giri, tempo di livellamento
• r1443
CO: Regol. n. giri, valore att. numero giri a ingresso valore att.
• p1452
Regolatore n.giri, val. attuale n.giri, tempo liv. (senza enc.)
• r2169
CO: Valore attuale di numero di giri livellato, messaggi
• r2199.7
Scostamento n. giri modello/esterno in tolleranza
• p3236
Valore di soglia numero di giri 7
• p3237
Numero di giri isteresi 7
• p3238
Ritardo di disinserzione, n_att modello motore = n_att esterno
Regolazione della coppia
Descrizione
Nella regolazione del numero di giri senza encoder SLVC (p1300 = 20) o con encoder VC
(p1300 = 21) è possibile, mediante il parametro BICO p1501, passare alla regolazione di
coppia (azionamento slave). La commutazione tra regolazione del numero di giri e
regolazione di coppia non è possibile se è stata scelta direttamente la regolazione di coppia
con p1300 = 22 o 23. L'impostazione del valore di riferimento della coppia o del valore di
riferimento aggiuntivo della coppia può avvenire tramite i parametri BICO p1503 (CI: valore
di riferimento della coppia) o p1511 (CI: valore di riferimento aggiuntivo della coppia). La
coppia aggiuntiva agisce sia per la regolazione della coppia sia per quella del numero di giri.
Con questa caratteristica è possibile realizzare con il valore nominale aggiuntivo di coppia
una coppia di precontrollo nella regolazione del numero di giri.
Nota
Nessuna assegnazione di valori di riferimento fissi di coppia
Per motivi di sicurezza, attualmente non è prevista un'assegnazione di valori di riferimento
fissi di coppia.
Nota
Energia rigenerativa senza possibilità di recupero in rete
Se si produce energia rigenerativa e la stessa non può essere recuperata in rete, è
necessario impiegare un Braking Module collegato a resistenza di frenatura.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
323
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Figura 7-21
Regolatore di velocità/della coppia
La somma dei due valori di riferimento di coppia viene limitata nello stesso modo del valore
di riferimento di coppia della regolazione della velocità. Al di sopra del numero di giri
massimo (p1082), un limitatore del numero di giri riduce i limiti di coppia per evitare l'ulteriore
accelerazione dell'azionamento.
Una "vera" regolazione di coppia (con autoimpostazione del numero di giri) è possibile solo
nel funzionamento regolato della regolazione vettoriale senza encoder (SLVC), ma non in
quello controllato. Nel funzionamento controllato, il valore di riferimento di coppia agisce sul
numero di giri di riferimento tramite un integratore di accelerazione (tempo di integrazione ~
p1499 x p0341 x p0342). Per questo motivo la regolazione di coppia senza encoder nel
campo di motore fermo è adatta solo per applicazioni che necessitano di una coppia di
accelerazione e non di una coppia di carico (ad es., azionamenti per movimento orizzontale).
Questa limitazione non esiste nel caso di regolazione di coppia con encoder.
Reazioni OFF
● OFF1 e p1300 = 22, 23
– Reazione come per OFF2
● OFF1, p1501 = segnale "1" e p1300 ≠ 22, 23
– Nessuna reazione di frenatura propria, la reazione di frenatura ha luogo tramite un
azionamento che imposta la coppia.
– Al termine del tempo di chiusura del freno motore (p1217) vengono cancellati gli
impulsi. Lo stato di fermo viene rilevato quando il valore reale del numero di giri
scende al di sotto della soglia del numero di giri (p1226) oppure quando è trascorso il
tempo di sorveglianza (p1227) avviato con il valore di riferimento del numero di giri ≤
soglia del numero di giri (p1226).
– Viene attivato il blocco inserzione.
Convertitori da incasso
324
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
● OFF2
– Cancellazione impulsi immediata, il motore si ferma per inerzia.
– Se è stato parametrizzato un freno motore, lo stesso viene immediatamente attivato.
– Viene attivato il blocco inserzione.
● OFF3
– Passaggio al funzionamento con regolazione del numero di giri
– L'azionamento viene frenato con l'impostazione immediata di n_rif = 0 sulla rampa di
decelerazione OFF3 (p1135).
– Dopo il riconoscimento dell'arresto, un freno motore eventualmente parametrizzato
viene immediatamente chiuso.
– Al termine del tempo di chiusura del freno motore (p1217) vengono cancellati gli
impulsi. Lo stato di fermo viene rilevato quando il valore reale del numero di giri
scende al di sotto della soglia del numero di giri (p1226) oppure quando è trascorso il
tempo di sorveglianza (p1227) avviato con il valore di riferimento del numero di giri ≤
soglia del numero di giri (p1226).
– Viene attivato il blocco inserzione.
Schema logico
FP 6060
Valore di riferimento della coppia
• p0341
Momento di inerzia motore
• p0342
Momento di inerzia, rapporto del totale rispetto al motore
• p1300
Modalità operativa di controllo/regolazione
• p1499
Accelerazione con regolazione di coppia, scalatura
• p1501
Commutazione regolazione numero di giri/coppia
• p1503
Valore di riferimento della coppia
• p1511
Coppia aggiuntiva 1
• p1512
Coppia aggiuntiva 1, scalatura
• p1513
Coppia aggiuntiva 2
• p1514
Coppia aggiuntiva 2, scalatura
• r1515
Coppia aggiuntiva totale
Parametri
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
325
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
7.4.6
Limitazione di coppia
Descrizione
Figura 7-22
Limitazione di coppia
Questo valore indica la coppia massima ammessa, per la quale possono essere
parametrizzati limiti differenti per il funzionamento come motore e come generatore.
• p0640
Limite di corrente
• p1520
CO: Limite di coppia superiore/funzionamento motorico
• p1521
CO: Limite di coppia inferiore/generatorio
• p1522
CI: Limite di coppia superiore/funzionamento motorico
• p1523
CI: Limite di coppia inferiore/generatorio
• p1524
CO: Limite di coppia superiore/motorico, scalatura
• p1525
CO: Limite di coppia inferiore/generatorio, scalatura
• p1530
Limite di potenza motorico
• p1531
Limite di potenza generatorio
I valori limite attuali di coppia attivi vengono visualizzati nei seguenti parametri:
• r0067
Azionamento, corrente di uscita massima
• r1526
Limite di coppia superiore/motorico senza offset
• r1527
Limite di coppia inferiore/generatorio senza offset
Le seguenti limitazioni agiscono tutte sul valore di riferimento di coppia presente sull'uscita
del regolatore del n. di giri in caso di regolazione del numero di giri oppure quale ingresso di
coppia in caso di regolazione di coppia. Delle diverse limitazioni viene utilizzato
rispettivamente il minimo o il massimo. Questo minimo o massimo viene calcolato
ciclicamente e visualizzato in r1538 o r1539.
• r1538
Limite di coppia superiore attivo
• r1539
Limite di coppia inferiore attivo
Convertitori da incasso
326
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Questi valori ciclici limitano quindi il valore di riferimento o di coppia in uscita del regolatore
del n. di giri o in ingresso del regolatore di coppia, oppure indicano l'istante di massima
coppia possibile. Se avviene una limitazione del valore di riferimento di coppia, ciò viene
indicato dal parametro p1407:
• r1407.8
Limite superiore coppia attivo
• r1407.9
Limite inferiore coppia attivo
FP 6060
Valore di riferimento della coppia
FP 6630
Limite coppia superiore/inferiore
FP 6640
Limiti di corrente/potenza/coppia
Schema logico
7.4.7
Filtro del valore di riferimento di corrente
Descrizione
I filtri del valore di riferimento di corrente consentono di sopprimere le grandezze di disturbo
cicliche che possono essere provocate ad es. da oscillazioni meccaniche nella catena
cinematica.
I filtri del valore di riferimento di corrente possono essere impostati nel seguente modo:
● Filtro passabasso di 2° ordine (PT2: -40 dB/decade)
● Filtro generale 2° ordine
Il filtro arrestabanda e il filtro passabasso con abbassamento vengono convertiti tramite
STARTER nei parametri del filtro generale di 2° ordine.
I filtri del valore di riferimento di corrente vengono attivati con p1656.0 = 1 o p1656.1 = 1.
Con p1657 ... p1666 si impostano le proprietà dei filtri del valore di riferimento di corrente.
Se vengono effettuate modifiche ai dati dei filtri del valore di riferimento di corrente, è
possibile evitare la conversione dei nuovi dati del filtro tramite p1699 = 1.
Con l'impostazione p1699 = 0 si esegue il calcolo e si applicano i nuovi valori.
Schemi logici
FP 6710
Filtro del valore di riferimento di corrente
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
327
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Parametri
7.4.8
• p1655[0]
CI: Filtro del valore di riferimento di corrente 1, frequenza intrinseca Tuning
• p1655[1]
CI: Filtro del valore di riferimento di corrente 2, frequenza intrinseca Tuning
• p1656.0
Filtro del valore di riferimento di corrente 1, attivazione
• p1657
Filtro del valore di riferimento di corrente 1, tipo
• p1658
Filtro del valore di riferimento di corrente 1, frequenza intrinseca denominatore
• p1659
Filtro del valore di riferimento di corrente 1, attenuazione denominatore
• p1660
Filtro del valore di riferimento di corrente 1, frequenza intrinseca numeratore
• p1661
Filtro del valore di riferimento di corrente 1, attenuazione numeratore
• p1656.1
Filtro del valore di riferimento di corrente 2, attivazione
• p1662
Filtro del valore di riferimento di corrente 2, tipo
• p1663
Filtro del valore di riferimento di corrente 2, frequenza intrinseca denominatore
• p1664
Filtro del valore di riferimento di corrente 2, attenuazione denominatore
• p1665
Filtro del valore di riferimento di corrente 2, frequenza intrinseca numeratore
• p1666
Filtro del valore di riferimento di corrente 2, attenuazione numeratore
• p1699
Filtro, acquisizione dati
Motori sincroni ad eccitazione permanente
Descrizione
Sono supportati i motori sincroni ad eccitazione permanente senza encoder nel
funzionamento senza encoder.
Le applicazioni tipiche sono gli azionamenti diretti con motori torque caratterizzati da coppia
elevata con numeri di giri ridotti, ad es. i motori torque completi Siemens della serie 1FW3.
Questi azionamenti consentono, nelle relative applicazioni, di fare a meno dei riduttori e
quindi di parti meccaniche soggette ad usura.
AVVERTENZA
Pericolo di morte per folgorazione in caso di motori sincroni ad eccitazione permanente
rotanti
Non appena il motore gira, sui morsetti di collegamento si produce una tensione il cui
contatto può provocare lesioni gravi o la morte.
• Quando si eseguono interventi sul convertitore, scollegare elettricamente il motore.
• Se non è possibile realizzare una separazione dei cavi di collegamento con il motore,
proteggere il motore contro rotazioni indesiderate, ad es. tramite un freno di
stazionamento.
Convertitori da incasso
328
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Caratteristiche
● Deflussaggio di campo fino a ca. 1,2 x numero di giri nominale (in funzione della tensione
di allacciamento del convertitore e dei dati motore, vedere anche le condizioni marginali)
● Riavviamento al volo (nel funzionamento senza encoder solo con impiego di un modulo
VSM per il rilevamento del numero di giri del motore e dell'angolo di fase)
● Regolazione di numero di giri e coppia Vector
● Controllo U/f Vector per scopi di diagnostica
● Identificazione motore
● Ottimizzazione del regolatore di velocità (misura in rotazione)
Condizioni generali
● Il numero di giri massimo e la coppia massima dipendono dalla tensione di uscita
disponibile del convertitore e dalla forza controelettromotrice del motore (norme per il
calcolo: La FEM non deve superare Vnom. convertitore).
● Calcolo del numero di giri massimo:
● Il numero di giri massimo in funzione della tensione dei morsetti e del ciclo di carico può
essere ricavato dai fogli dati del motore / dalle istruzioni di progettazione.
● Per la regolazione dei motori sincroni ad eccitazione permanente non esiste alcun
modello termico. La protezione del motore dal surriscaldamento può essere garantita
solo mediante una sensori di temperatura (PTC, KTY). Per raggiungere una precisione di
coppia elevata si consiglia di effettuare una misura della temperatura del motore tramite
sensore di temperatura (KTY).
Messa in servizio
Per la messa in servizio si consiglia di procedere nel seguente ordine:
● Eseguire la configurazione dell'azionamento
Durante la messa in servizio con STARTER o con il pannello operatore AOP30 è
necessario selezionare il motore sincrono ad eccitazione permanente. Quindi devono
essere immessi i dati del motore indicati nella tabella seguente. Infine viene attivata
l'identificazione del motore e l'ottimizzazione del numero di giri (p1900). La regolazione
encoder viene attivata automaticamente con l'identificazione del motore.
● Identificazione del motore (misura in stato di fermo, p1910)
● Ottimizzazione del regolatore di velocità (misura in rotazione, p1960)
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
329
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Dati del motore per motori sincroni ad eccitazione permanente
Tabella 7- 2
Dati del motore, targhetta identificativa
Parametri
Descrizione
Nota
p0304
Tensione nominale del motore
Se questo valore non è noto, si può immettere anche il
valore "0".
Immettendo il valore corretto è comunque possibile
calcolare più precisamente l'induttanza di dispersione
dello statore (p0356, p0357).
p0305
Corrente nominale del motore
p0307
Potenza nominale del motore
p0310
Frequenza nominale del motore
p0311
Numero di giri nominale del motore
p0314
Numero di coppie di poli del motore
Se questo valore non è noto, si può immettere anche il
valore "0".
p0316
Costante di coppia del motore
Se questo valore non è noto, si può immettere anche il
valore "0".
In assenza dell'indicazione della costante di coppia kT sulla targhetta identificativa o nella
specifica dati, essa può essere ricavata dai dati nominali del motore oppure dalla corrente da
fermo I0 e dalla coppia da fermo M0 con il seguente calcolo:
oppure
I dati opzionali del motore possono essere immessi, se sono noti. In caso contrario vengono
stimati sulla base dei dati della targhetta oppure tramite l'identificazione del motore o
l'ottimizzazione del numero di giri.
Tabella 7- 3
Dati del motore, targhetta identificativa
Parametri
Descrizione
Nota
p0320
Corrente di cortocircuito nominale del motore
Viene utilizzata per la curva caratteristica di
deflussaggio del campo
p0322
p0323
p0325
Numero di giri max. del motore
Corrente massima del motore
Identificazione della posizione del rotore,
corrente 1ª fase
Angolo di carico opzionale
Costante del momento di riluttanza
Numero di giri max. meccanico
Protezione contro la smagnetizzazione
-
p0329
Corrente di identificazione della posizione
rotore
-
p0341
p0344
p0350
p0356
Momento di inerzia motore
Massa del motore
Resistenza dello statore a freddo
Induttanza trasversale dello statore Lq
Per il precomando del regolatore di velocità
-
p0357
Induttanza longitudinale dello statore Ld
-
p0327
p0328
Opzionale, altrimenti lasciare 90°
-
Convertitori da incasso
330
Istruzioni operative, 04/2014, A5E00386872A
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Protezione da cortocircuito
In caso di cortocircuito del convertitore o del cavo del motore, la macchina rotante
alimenterebbe il cortocircuito fino all'arresto. Come protezione può essere impiegato un
contattore di uscita che deve trovarsi il più vicino possibile al motore. Questo è necessario
soprattutto se il motore può continuare ad essere azionato dal carico in caso di guasto. Il
contattore deve essere dotato di un circuito di protezione contro le sovratensioni sul lato
motore allo scopo di evitare un danno dell'avvolgimento del motore come conseguenza della
disinserzione.
Per comandare il contattore si usa il segnale di comando r0863.1 (VECTOR) mediante
un'uscita digitale libera, il contatto di segnalazione di risposta del contattore viene cablato
tramite un'uscita digitale libera sul parametro p0864.
In caso di guasto del convertitore il motore viene così separato dal convertitore con una
reazione di disinserzione nel momento del blocco degli impulsi, in modo da evitare un
recupero nel punto in cui si è verificato il guasto.
Schema logico
FP 6721
Regolazione vettoriale - Valore di riferimento Id (PEM, p0300 = 2)
FP 6724
Regolazione vettoriale - Regolatore di diseccitazione (PEM, p0300 = 2)
FP 6731
Regolazione vettoriale - Interfaccia verso il Motor Module (PEM, p0300 = 2)
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
331
Canale del valore di riferimento e regolazione
7.4 Regolazione vettoriale di numero di giri/coppia con/senza encoder
Convertitori da incasso
332
Istruzioni operative, 04/2014, A5E00386872A
Morsetti di uscita
8.1
8
Contenuto del capitolo
Questo capitolo descrive:
● Uscite analogiche
● Uscite digitali
Schemi logici
In alcuni punti di questo capitolo si fa riferimento a schemi logici. Questi si trovano nel CD
nel "Manuale delle liste SINAMICS G130/G150", in cui è descritta nei dettagli la funzionalità
complessiva ad uso degli utenti più esperti.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
333
Morsetti di uscita
8.2 Uscite analogiche TM31
8.2
Uscite analogiche TM31
Descrizione
Sulla morsettiera opzionale TM31 sono disponibili due uscite analogiche per l'emissione dei
valori di riferimento tramite segnali in tensione o corrente.
Stato di fornitura:
● AO0: Valore reale del numero di giri 0 – 10 V
● AO1: Valore reale corrente motore 0 – 10 V
Presupposti
● Power Module, CU320-2 e TM31 sono presenti e installati correttamente
● La preimpostazione "Morsetti TM31" o "PROFIdrive+TM31" è stata selezionata durante la
messa in servizio:
STARTER:
"Morsettiera TM31" o "PROFIdrive+TM31"
AOP30:
"2: Morsetti TM31" o "4: PROFIdrive+TM31"
Schema del flusso dei segnali
Figura 8-1
Schema del flusso dei segnali: uscita analogica 0
Schema logico
FP 1840,
FP 9572
TM31 - Uscite analogiche (AO 0 ... AO 1)
Convertitori da incasso
334
Istruzioni operative, 04/2014, A5E00386872A
Morsetti di uscita
8.2 Uscite analogiche TM31
Parametri
8.2.1
• p4071
TM31 Uscite analogiche, sorgente del segnale
• p4073
TM31 Uscite analogiche, costante del tempo di livellamento
• r4074
Uscite analogiche, tensione/corrente di uscita attuale
• p4076
TM31 Uscite analogiche, tipo
• p4077
TM31 Uscite analogiche, curva caratteristica valore x1
• p4078
TM31 Uscite analogiche, curva caratteristica valore y1
• p4079
TM31 Uscite analogiche, curva caratteristica valore x2
• p4080
TM31 Uscite analogiche, curva caratteristica valore y2
Lista dei segnali per i segnali analogici
Lista dei segnali per le uscite analogiche
Tabella 8- 1
Lista dei segnali per le uscite analogiche
Segnale
Parametro
Unità
Normalizzazione (100%=...)
vedere la tabella seguente
Valore di riferimento del numero di giri a monte del
filtro del valore di riferimento
r0060
1/min
p2000
Giri del motore non livellati
r0061
1/min
p2000
Valore attuale del numero di giri dopo livellamento
r0063
1/min
p2000
Frequenza di uscita
r0066
Hz
Frequenza di riferimento
Corrente in uscita
r0068
Aeff
p2002
Tensione del circuito intermedio
r0070
V
p2001
Valore di riferimento di coppia
r0079
Nm
p2003
Potenza d'uscita
r0082
kW
r2004
Deviazione di regolazione
r0064
1/min
p2000
Grado di controllo
r0074
%
Fattore di comando di
riferimento
Valore di riferimento della corrente che costituisce
la coppia
r0077
A
p2002
Valore attuale di corrente che forma la coppia
r0078
A
p2002
Valore di riferimento del flusso
r0083
%
Flusso di riferimento
Valore attuale di flusso
r0084
%
Flusso di riferimento
Uscita regolatore di velocità
r1480
Nm
p2003
Componente I regolatore numero di giri
r1482
Nm
p2003
Per scopi diagnostici
Per scopi diagnostici ampliati
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
335
Morsetti di uscita
8.2 Uscite analogiche TM31
Normalizzazioni
Tabella 8- 2
Normalizzazioni
Grandezza
Parametro di normalizzazione
Preimpostazione durante la messa in
servizio rapida
Numero di giri di riferimento
100 % = p2000
p2000 = n. di giri massimo (p1082)
Tensione di riferimento
100 % = p2001
p2001 = 1000 V
Corrente di riferimento
100 % = p2002
p2002 = limite di corrente (p0640)
Coppia di riferimento
100 % = p2003
p2003 = 2 x coppia nominale motore
Potenza di riferimento
100 % = r2004
r2004 = (p2003 x p2000 x π) / 30
Frequenza di riferimento
100 % = p2000/60
Fattore di comando di
riferimento
100 % = massima tensione di uscita senza
sovracomando
Flusso di riferimento
100 % = flusso nominale del motore
Temperatura di riferimento
100 % = p2006
p2006 = 100 °C
Modifica dell'uscita analogica 0 da uscita di tensione a uscita di corrente 0 … 20 mA (esempio)
L'uscita di corrente si trova sul morsetto 3, la massa sul
morsetto 2
Impostare il tipo di uscita analogica 0 su 0 ... 20 mA
Convertitori da incasso
336
Istruzioni operative, 04/2014, A5E00386872A
Morsetti di uscita
8.2 Uscite analogiche TM31
Modifica dell'uscita analogica 0 da uscita di tensione a uscita di corrente 0 … 20 mA (esempio)
mediante l'impostazione della curva caratteristica
L'uscita di corrente si trova sul morsetto 3, la massa sul
morsetto 2
Impostare TM31.AO_Typ [uscita analogica 0] su 0 ... 20 mA
Impostare la caratteristica TM31.AO x1 su 0.00 %
Impostare la caratteristica TM31.AO y1 su 0 mA
Impostare la caratteristica TM31.AO x2 su 100.00 %
Impostare la caratteristica TM31.AO y2 su 20 mA
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
337
Morsetti di uscita
8.3 Uscite digitali TM31
8.3
Uscite digitali TM31
Descrizione
Sulla morsettiera opzionale TM31 sono presenti 4 uscite digitali bidirezionali (morsetto X541)
e 2 uscite a relè (morsetto X542). Queste uscite sono liberamente parametrizzabili.
Presupposti
● Power Module, CU320 e TM31 sono presenti e installati correttamente
● La preimpostazione "Morsetti TM31" o "Profidrive+TM31" è stata selezionata durante la
messa in servizio:
STARTER:
"Morsettiera TM31" o "Profidrive+TM31"
AOP30:
"2: Morsetti TM31" o "4: Profidrive+TM31"
Schema del flusso dei segnali
Figura 8-2
Schema del flusso dei segnali: Uscite digitali
Stato di fornitura:
Tabella 8- 3
Stato di fornitura uscite digitali
Uscita digitale
Morsetto
Stato di fornitura:
DO0
X542: 2,3
"Impulsi abilitati"
DO1
X542: 5,6
"Nessuna anomalia"
DI/DO8
X541: 2
"Pronto all'inserzione"
DI/DO9
X541: 3
DI/DO10
X541:4
DI/DO11
X541: 5
Convertitori da incasso
338
Istruzioni operative, 04/2014, A5E00386872A
Morsetti di uscita
8.3 Uscite digitali TM31
Selezione delle possibili interconnessioni per le uscite digitali
Tabella 8- 4
Selezione delle possibili interconnessioni per le uscite digitali
Segnale
Bit nella parola
di stato 1
Parametri
1 = pronto all'inserzione
0
r0899.0
1 = pronto al funzionamento
1
r0899.1
1 = funzionamento abilitato
2
r0899.2
1 = anomalia attiva
3
r2139.3
0 = arresto per inerzia (OFF2 attivo)
4
r0899.4
0 = arresto rapido attivo (OFF3 attivo)
5
r0899.5
1 = blocco inserzione attivo
6
r0899.6
1 = avviso attivo
7
r2139.7
1 = differenza tra valore di riferimento e valore attuale nella fascia di tolleranza
8
r2197.7
1 = comando richiesto
9
r0899.9
1 = valore di confronto f o n raggiunto o superato
10
r2199.1
1 = limite I, M o P raggiunto
11
r1407.7
1 = apertura freno di stazionamento
12
r0899.12
0 = avviso sovratemperatura motore
13
r2135.14
1 = il motore gira in avanti (n_att ≥ 0)
0 = il motore gira indietro (n_att < 0)
14
r2197.3
0 = avviso sovraccarico termico della parte di potenza (A5000)
15
r2135.15
1 = impulsi abilitati
r0899.11
1 = n_att ≤ p2155
r2197.1
1 = n_att > p2155
r2197.2
1 = accelerazione/decelerazione conclusa
r2199.5
1 = |n_att| < p2161 (preferibile rispetto al messaggio n_min oppure n=0)
r2199.0
1 = |M_rif| < p2174
r2198.10
1 = modo LOCAL attivo (comando tramite pannello operatore o pannello di
comando)
r0807.0
1 = motore bloccato
r2198.6
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
339
Morsetti di uscita
8.3 Uscite digitali TM31
Convertitori da incasso
340
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di
protezione
9.1
9
Contenuto del capitolo
Questo capitolo descrive:
● Funzioni dell'azionamento:
identificazione motore, ottimizzazione del rendimento, magnetizzazione rapida per motori
asincroni, regolazione Vdc, riavviamento automatico, riavviamento al volo, commutazione
motore, caratteristica di attrito, frenatura mediante cortocircuito dell'indotto, freno a
corrente continua, aumento della frequenza di uscita, vobulazione di frequenza degli
impulsi, tempo di esecuzione, modalità simulazione, inversione di direzione,
commutazione di unità, comportamento di derating in presenza di elevata frequenza
impulsi, comando freni semplice, visualizzazione del risparmio di energia per macchine
fluidodinamiche, protezione in scrittura, protezione del know-how, funzionamento di
emergenza, server Web
● Funzioni di ampliamento:
regolatore di tecnologia, funzione di bypass, comando freni esteso, funzioni di
sorveglianza estese
● Funzioni di sorveglianza e di protezione:
protezione della parte di potenza, sorveglianze termiche e reazioni al sovraccarico,
protezione contro il blocco, protezione contro lo stallo, protezione termica del motore
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
341
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Schemi logici
In alcuni punti di questo capitolo si fa riferimento a schemi logici. Questi si trovano nel CD
nel "Manuale delle liste SINAMICS G130/G150", in cui è descritta nei dettagli la funzionalità
complessiva ad uso degli utenti più esperti.
9.2
Funzioni dell'azionamento
9.2.1
Identificazione dei dati del motore e ottimizzazione automatica del regolatore
del numero di giri
Descrizione
Esistono due possibilità per l'identificazione del motore, basate l'una sull'altra:
● Identificazione del motore con p1910 (misura in stato di fermo)
● Misura in rotazione con p1960 (ottimizzazione del regolatore di velocità)
Questi metodi possono essere selezionati in modo semplificato tramite p1900. Con p1900 =
2 si seleziona l'identificazione del motore (nessun motore in rotazione). Con p1900 = 1 si
attiva anche la misura in rotazione, si imposta p1910 = 1 e p1960 a seconda del tipo di
regolazione attuale (p1300).
Il parametro p1960 viene impostato in funzione di p1300 come segue:
● p1960 = 1, se p1300 = 20 o 22 (regolazione senza encoder)
● p1960 = 2, se p1300 = 21 o 23 (regolazione con encoder)
Le misure parametrizzate in p1900 vengono avviate nell'ordine seguente in base alla
rispettiva abilitazione dell'azionamento:
● Identificazione del motore in stato di fermo, dopo il completamento della misura si verifica
un blocco impulsi e il parametro p1910 viene resettato a 0.
● Regolazione encoder, dopo il completamento della misura si verifica un blocco impulsi e il
parametro p1990 viene resettato a 0.
● Misura rotante, dopo il completamento della misura si verifica un blocco impulsi e il
parametro p1960 viene resettato a 0.
● Al termine di tutte le misure attivate tramite p1900, il parametro viene resettato a 0.
Nota
Memorizzazione non volatile
Per rendere permanente la nuova impostazione del regolatore, è necessario memorizzare i
dati in modo non volatile con p0977 o p0971.
Convertitori da incasso
342
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
AVVERTENZA
Pericolo di vita dovuto al movimento imprevisto del motore durante l'identificazione dati
motore con motore funzionante
Se si seleziona l'identificazione dei dati motore con ottimizzazione a motore funzionante,
dopo la messa in servizio l'azionamento provoca movimenti del motore che raggiungono il
numero di giri massimo.
• Rispettare le avvertenze di sicurezza generali.
• Accertarsi che le funzioni di OFF di emergenza siano operative al momento della messa
in servizio.
9.2.1.1
Identificazione dati del motore
Descrizione
L'identificazione del motore con p1910 permette di determinare i parametri del motore
durante lo stato di fermo (vedere anche p1960: ottimizzazione del regolatore di velocità):
● Dati del circuito equivalente p1910 = 1
● Curva caratteristica di magnetizzazione p1910 = 3
Per motivi legati alla regolazione, si consiglia di effettuare assolutamente l'identificazione del
motore, in quanto sulla base dei dati della targhetta identificativa, i dati del circuito
equivalente, la resistenza dei cavi del motore, la tensione diretta IGBT oppure la
compensazione dei tempi di interblocco dell'IGBT possono solo essere stimati. La resistenza
dello statore, ad esempio, è di grande importanza per la stabilità della regolazione vettoriale
senza encoder o per l'aumento di tensione con curva caratteristica U/f.
L'identificazione del motore va effettuata soprattutto in caso di lunghe linee di alimentazione
o di utilizzo di motori di altri produttori. Quando si avvia per la prima volta l'identificazione del
motore, in base ai dati della targhetta identificativa (dati nominali) vengono ricavati i seguenti
dati con p1910 = 1:
Tabella 9- 1
Dati ricavati tramite p1910
Motore asincrono
p1910 = 1
p1910 = 3
Motori sincroni ad eccitazione permanente
•
Resistenza statore (p0350)
•
Resistenza statore (p0350)
•
Resistenza rotore (p0354)
•
Induttanza statore asse q (p0356)
•
Induttanza di dispersione dello statore (p0356)
•
Induttanza statore asse d (p0357)
•
Induttanza di dispersione del rotore (p0358)
•
•
Induttanza principale (p0360)
Tensione di soglia della valvola del
convertitore (p1825)
•
Tensione di soglia della valvola del convertitore (p1825)
•
•
Tempi di interdizione della valvola del convertitore
(p1828 ... p1830)
Tempi di interdizione della valvola del
convertitore (p1828 ... p1830)
•
Caratteristica di saturazione (p0362 ... p0366)
Non applicabile
Attenzione: alla fine della regolazione
dell'encoder, il motore effettua in modo
automatico approssimativamente un giro
per stabilire la tacca di zero dell'encoder.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
343
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Poiché i dati della targhetta identificativa indicano i valori di inizializzazione per
l'identificazione, per determinare i dati summenzionati occorre immettere in modo corretto e
coerente i dati della targhetta identificativa, tenendo conto del tipo di collegamento
(stella/triangolo).
Si consiglia di impostare la resistenza del cavo motore (p0352) prima della misura in stato di
fermo (p1910), affinché la stessa, durante il calcolo della resistenza statorica p0350, possa
essere detratta dalla resistenza totale misurata.
Con l'immissione di questa resistenza cavi migliora la precisione dell'adattamento di
resistenza termico, soprattutto nel caso di linee di alimentazione lunghe. Particolarmente
durante la regolazione vettoriale senza encoder, questo aspetto influisce sul comportamento
ai bassi regimi.
Figura 9-1
Circuito equivalente motore asincrono e cavo
Se è presente un filtro di uscita (vedere p0230) o un'induttanza in serie (p0353), anche i
relativi dati vanno immessi prima della misura da fermo.
Il valore dell'induttanza viene quindi detratto dal valore totale misurato della dispersione. Per
i filtri sinusoidali si misurano solo la resistenza statorica, la tensione di soglia della valvola e
il tempo di interdizione della valvola.
Nota
Grande dispersione dell'impedenza nominale del motore
In caso di dispersione superiore al 35 - 40 % dell'impedenza nominale del motore, la
dinamica della regolazione del numero di giri e della corrente è limitata nel campo dei limiti di
tensione e nel funzionamento di deflussaggio.
Nota
Eseguire la misura in stato di fermo a motore freddo
La misura in stato di fermo va eseguita a motore freddo. In p0625 va immessa la
temperatura ambiente stimata del motore presente durante la misurazione (per il sensore
KTY: impostazione in p0600, p0601 e lettura da r0035). Questo è il punto di riferimento per il
modello di motore termico e l'adattamento termico RS/RR.
Oltre ai dati del circuito equivalente è possibile determinare mediante l'identificazione dati del
motore (p1910 = 3) la curva di magnetizzazione del motore nelle macchine asincrone. In
Convertitori da incasso
344
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
ragione della maggiore precisione, se possibile la caratteristica di magnetizzazione
andrebbe determinata nell'ambito della misura in rotazione (senza encoder: p1960 = 1, 3;
con encoder: p1960 = 2, 4). Se l'azionamento opera nel campo di deflussaggio, questa
curva caratteristica deve essere soprattutto stabilita nella regolazione vettoriale. La
caratteristica di magnetizzazione consente di calcolare con maggiore precisione la corrente
formante il campo nel campo di deflussaggio e di ottenere quindi una migliore precisione di
coppia.
Nota
Risultati della misura in rotazione
La misura in rotazione (p1960) permette di determinare, nelle macchine asincrone, la
corrente nominale di magnetizzazione e la curva caratteristica di saturazione in modo più
preciso rispetto alla misura in stato di fermo (p1910).
Figura 9-2
Curva caratteristica di magnetizzazione
Svolgimento dell'identificazione del motore
● Immettere p1910 > 0, viene visualizzato l'allarme A07991.
● L'identificazione inizia dopo il successivo comando di inserzione.
● p1910 si azzera (identificazione avvenuta correttamente) oppure
viene segnalata l'anomalia F07990
● r0047 indica lo stato attuale della misurazione.
Nota
Memorizzazione non volatile
Per rendere permanente la nuova impostazione del regolatore, è necessario memorizzare i
dati in modo non volatile con p0977 o p0971.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
345
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
AVVERTENZA
Pericolo di vita dovuto al movimento imprevisto del motore durante l'identificazione motore
Se si seleziona l'identificazione motore, dopo la messa in servizio l'azionamento può
attivare dei movimenti del motore.
• Rispettare le avvertenze di sicurezza generali.
• Accertarsi che le funzioni di OFF di emergenza siano operative al momento della messa
in servizio.
9.2.1.2
Misura rotante e ottimizzazione del regolatore del numero di giri
Descrizione
La "misura in rotazione" può essere attivata tramite p1960 o tramite p1900 = 1.
La differenza principale tra misura in rotazione e misura da fermo è l'ottimizzazione del
regolatore di velocità, con la quale si determina il momento di inerzia dell'azionamento e si
imposta il regolatore di velocità. Nei motori asincroni vengono Inoltre misurate la curva
caratteristica di saturazione e la corrente nominale di magnetizzazione del motore.
Se la misura in rotazione non deve essere eseguita con la velocità impostata in p1965,
questo parametro può essere regolato prima di iniziare la misurazione. Sono consigliati
numeri di giri più elevati.
Lo stesso vale per il numero di giri definito in p1961, per il quale si determina la caratteristica
di saturazione e si esegue il test dell'encoder.
Il regolatore di velocità viene impostato in base al fattore di dinamica p1967 secondo l'ottimo
simmetrico. p1967 va impostato prima del ciclo di ottimizzazione e ha effetto solo sul calcolo
dei parametri del regolatore.
Se durante la misurazione emerge che con il fattore dinamico specificato l'azionamento non
può funzionare stabilmente oppure che le ondulazioni della coppia sono troppo elevate, la
dinamica viene automaticamente ridotta e il risultato visualizzato in r1968. In seguito occorre
verificare se l'azionamento funziona stabilmente per l'intero campo di regolazione. Può
essere necessario ridurre la dinamica o effettuare la parametrizzazione richiesta
dell'adattamento Kp/Tn del regolatore di velocità.
Per la messa in servizio delle macchine asincrone si raccomanda di procedere come segue:
● Si consiglia di eseguire, prima di procedere all'accoppiamento del carico, una "misura in
rotazione" completa (senza encoder: p1960 = 1; con encoder: p1960 = 2). Non essendo
caricata la macchina asincrona, sono prevedibili risultati particolarmente precisi della
caratteristica di saturazione e della corrente di magnetizzazione nominale.
● Con il carico accoppiato, l'ottimizzazione del numero di giri va nuovamente ripetuta
essendosi modificato il momento di inerzia totale. La ripetizione avviene tramite il
parametro p1960 (senza encoder: p1960 = 3; con encoder: p1960 = 4).
Nell'ottimizzazione dei giri viene disattivata automaticamente l'acquisizione della
caratteristica di saturazione nel parametro p1959.
Alla messa in servizio di macchine sincrone ad eccitazione permanente occorre eseguire
un'ottimizzazione del regolatore di velocità (p1960 = 2/4) con il carico accoppiato.
Convertitori da incasso
346
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Svolgimento della misura in rotazione (p1960 > 0)
Le seguenti misure vengono eseguite, per l'impostazione delle abilitazioni e il successivo
comando di inserzione, secondo le impostazioni in p1959 e p1960.
● Test dell'encoder
Se è presente l'encoder di velocità, vengono verificati il senso di rotazione e la
risoluzione.
● Solo per i motori asincroni:
– Misura della curva caratteristica di magnetizzazione (da p0362 a p0369)
– Misurazione della corrente di magnetizzazione (p0320) e definizione della tensione di
offset del convertitore per la compensazione dell'offset
– Misurazione della saturazione dell'induttanza di dispersione e impostazione
dell'adattamento del regolatore di corrente (p0391… p0393)
Per i motori 1LA1 e 1LA8 (p0300 = 11, 18) viene attivata automaticamente (vedere
p1959.5).
● Ottimizzazione del regolatore di velocità
– p1470 e p1472, se p1960 = 1 (funzionamento senza encoder)
– p1460 e p1462, se p1960 = 2 (funzionamento con encoder)
– Disattivazione dell'adattamento Kp
● Impostazione del precomando di accelerazione (p1496)
● Impostazione del rapporto tra momento di inerzia globale e motore (p0342)
Nota
Memorizzazione non volatile
Per rendere permanente la nuova impostazione del regolatore, è necessario memorizzare i
dati in modo non volatile con p0977 o p0971.
AVVERTENZA
Pericolo di vita dovuto al movimento imprevisto del motore durante l'identificazione dati
motore con motore funzionante
Se si seleziona l'identificazione dei dati motore con ottimizzazione a motore funzionante,
dopo la messa in servizio l'azionamento provoca movimenti del motore che raggiungono il
numero di giri massimo.
• Rispettare le avvertenze di sicurezza generali.
• Accertarsi che le funzioni di OFF di emergenza siano operative al momento della messa
in servizio.
Nota
Ottimizzazione del regolatore del numero di giri per il funzionamento con encoder
Se si esegue l'ottimizzazione del regolatore del numero di giri per il funzionamento con
encoder, il modo operativo di regolazione viene commutato automaticamente in modo
temporaneo sulla regolazione del numero di giri senza encoder per poter effettuare il test
dell'encoder.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
347
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.1.3
Misura rotante abbreviata
Con il carico accoppiato non è sempre possibile eseguire una misura in rotazione normale.
Con un metodo di misura abbreviato, alla prima inserzione del motore è possibile eseguire
una misura breve della coppia di inerzia e la misura della corrente di magnetizzazione e
della caratteristica di saturazione. Per questa misura in rotazione abbreviata esistono due
varianti:
● Misura abbreviata (p1959.12 = 1)
● Dopo la misura: passaggio diretto al funzionamento (p1959.13 = 1)
Durante la misura in rotazione abbreviata l'azionamento non viene portato fino al numero di
giri nominale, bensì fino al valore impostato in p1965 (impostazione di fabbrica 40 %). Il
parametro p1961 può essere adattato sul lato impianto, ma deve avere un valore
sufficientemente elevato da permettere alla macchina di uscire dal funzionamento controllato
in modo sicuro. La macchina dovrebbe essere azionata il più possibile a vuoto (coppia <
30 % di Mnom).
Durante la misura in rotazione abbreviata il salvataggio dei parametri è bloccato, dato che
per la misura sono stati eseguiti automaticamente adattamenti dei parametri che vengono
annullati dopo la misura.
Misura abbreviata (p1959.12 = 1)
Se è impostato p1959.12 = 1, viene eseguita una misura in rotazione abbreviata. La corrente
di magnetizzazione e il momento di inerzia vengono determinati con minore precisione, il
test di oscillazione non viene più eseguito.
Al termine della misura l'azionamento viene riportato allo stato di fermo e tutti i parametri
modificati per l'esecuzione della misura vengono resettati ai valori originari.
Dopo la misura: passaggio diretto al funzionamento (p1959.13 = 1)
Se è impostato p1959.13 = 1, al termine della misura abbreviata l'azionamento non viene
arrestato, bensì portato direttamente al numero di giri nominale desiderato con la rampa di
accelerazione impostata.
Dato che in questa misura non si frena fino al fermo e non si bloccano gli impulsi, non è più
possibile modificare i parametri che potrebbero essere riscritti in un secondo tempo durante
il funzionamento.
Non modificare i parametri di regolazione durante la misura (p1959.11 = 1)
Nella misura in rotazione l'azionamento modifica automaticamente i propri parametri del
regolatore del numero di giri durante l'avviamento. Questo avviene anche se i bit 3 e 4 del
parametro 1959 non sono impostati. Tuttavia in molti casi il disaccoppiamento degli
azionamenti comporta costi considerevoli. I carichi possiedono momenti di inerzia elevati. I
parametri del regolatore impostati dall'azionamento non si adattano sempre al compito
dell'azionamento e possono quindi provocare eventualmente danni alla meccanica.
Se è impostato p1959.11 = 1, il ricalcolo dei parametri del regolatore del numero di giri viene
impedito.
Convertitori da incasso
348
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.1.4
9.2.2
Parametri
• r0047
Identificazione dati motore e ottimizzazione regolatore del numero di giri
• p1300
Modalità operativa di controllo/regolazione
• p1900
Identificazione dati del motore e misura in rotazione
• p1959
Configurazione misura in rotazione
• p1960
Selezione misura in rotazione
• p1961
Curva caratteristica di saturazione, numero di giri per calcolo
• p1965
Ottimizzazione regolatore di velocità, numero di giri
• p1967
Ottimizzazione regolatore di velocità, fattore di dinamica
• r1968
Ottimizzazione regolatore di velocità, fattore di dinamica attuale
• r1969
Ottimizzazione regolatore di velocità, momento di inerzia identificato
• r1973
Misura in rotazione, test dell'encoder, calcolo n. di incrementi
• p1980
Identificazione posizione dei poli, metodo
• r3925
Identificazioni, segnalazione di fine
• r3927
Parola di comando identificazione dati motore
• r3928
Configurazione misura in rotazione
Ottimizzazione del rendimento
Descrizione
L'ottimizzazione del rendimento tramite il parametro p1580 consente di realizzare:
● Perdite del motore nel campo del carico parziale
● Riduzione della rumorosità nel motore
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
349
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Figura 9-3
Ottimizzazione del rendimento
L'attivazione di questa funzione può rivelarsi utile soltanto se i requisiti dinamici richiesti non
sono elevati (ad es. ventilatori e pompe).
Il parametro p1580 = 100 % consente di dimezzare a (p1570/2) il flusso di riferimento della
macchina nel funzionamento a vuoto. Non appena l'azionamento registra un carico, il flusso
di riferimento aumenta con andamento lineare rispetto al carico stesso e raggiunge, a ca.
r0077 = r0331 x p1570, il valore di riferimento impostato in p1570.
Nell'area di deflussaggio del campo, il valore finale viene ridotto dal grado di deflussaggio
del campo attuale. Il tempo di livellamento (p1582) deve essere impostato su un valore
compreso tra ca. 100 e 200 ms. La differenziazione del flusso (vedere anche p1401.1) viene
disattivata automaticamente e a livello interno dopo la magnetizzazione.
Schema logico
FP 6722
Caratteristica di deflussaggio del campo, valore di riferimento Id (ASM, p0300
= 1)
FP 6723
Regolatore di diseccitazione, regolatore del flusso nel motore asincrono
(p0300 = 1)
• r0077
Valori di riferimento di corrente, formante la coppia
• r0331
Corrente di magnetizzazione/cortocircuito del motore (attuale)
• p1570
Valore di riferimento del flusso
• p1580
Ottimizzazione del rendimento
• p1582
Valore di riferimento di flusso, tempo di livellamento
Parametri
Convertitori da incasso
350
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.3
Magnetizzazione rapida nei motori asincroni
Descrizione
La magnetizzazione rapida per i motori asincroni serve ad abbreviare il tempo di attesa
durante la rimagnetizzazione.
Caratteristiche
● Formazione veloce del flusso per effetto dell'applicazione di una corrente generatrice del
campo sul limite di corrente. Ne consegue un notevole accorciamento del tempo di
rimagnetizzazione.
● Con la funzione "Riavviamento al volo" attivata, l'elaborazione prosegue con il tempo di
eccitazione impostato in p0346.
Messa in servizio
Per attivare la magnetizzazione rapida è necessario impostare il parametro p1401.6 = 1.
In questo modo durante l'inserzione vengono eseguite le seguenti fasi:
● Tramite il parametro p0644 ("Limite di corrente eccitazione motore asincrono") viene
impostata la corrente max. di eccitazione del motore asincrono riferita alla corrente
nominale consentita della parte di potenza (r0207[0])).
● Il valore di riferimento di corrente formante il campo salta al valore parametrizzato in
p0644 o, al massimo, a Imax = 0,9 x r0067 (limite superiore valore di riferimento di
corrente formante il campo).
● Il flusso sale così rapidamente quanto fisicamente possibile con la corrente impressa.
● Il valore di riferimento del flusso r0083 viene influenzato di conseguenza.
● Non appena il valore della soglia di flusso impostato tramite p1573 viene raggiunto (min.:
10 %, max. 200 %, impostazione di fabbrica: 100%), viene conclusa l'eccitazione ed
abilitato il valore di riferimento del numero di giri. Il valore della soglia di flusso per un
grosso carico non dovrebbe essere impostato troppo basso, perché la corrente formante
la coppia durante il tempo di magnetizzazione viene limitata.
Nota
Influenza del valore di soglia del flusso
Il valore della soglia di flusso nel parametro p1573 ha solo un'influenza se il valore reale
del flusso durante la magnetizzazione raggiunge il valore della soglia di flusso p1573 più
rapidamente rispetto al tempo impostato in p0346.
● Il flusso viene ancora formato finché non viene raggiunto il valore di riferimento del flusso
p1570.
● Il valore di riferimento di corrente formante il campo viene disattivato attraverso un
regolatore di flusso con guadagno P (p1590) ed il livellamento parametrizzato (p1616).
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
351
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Note
Con la magnetizzazione rapida selezionata (p1401.6 = 1) l'avviamento graduale viene
internamente disattivato ed emesso l'avviso A07416.
Con l'identificazione della resistenza dello statore attiva (vedere p0621 "Identificazione
resistenza statore dopo la reinserzione") la magnetizzazione rapida viene internamente
disattivata ed emesso l'avviso A07416.
Con la funzione "Riavviamento al volo" (vedere p1200) il parametro non ha alcuna influenza,
cioè la magnetizzazione rapida non viene eseguita.
Schema logico
FP 6491
Regolazione di flusso, configurazione
FP 6722
Caratteristica di deflussaggio del campo, valore di riferimento Id (ASM, p0300
= 1)
FP 6723
Regolatore di diseccitazione, regolatore del flusso (ASM, p0300 = 1)
• p0320
Corrente nominale di magnetizzazione/cortocircuito del motore
• p0346
Tempo di eccitazione del motore
• p0621
Identificazione resistenza dello statore dopo reinserzione
• p0640
Limite di corrente
• p0644
Limite di corrente eccitazione motore asincrono
• p1401
Regolazione di flusso, configurazione
• p1570
Valore di riferimento del flusso
• p1573
Valore di soglia flusso, rimagnetizzazione
• p1590
Regolatore di flusso, guadagno P
• p1616
Valore di riferimento di corrente, tempo di livellamento
Parametri
Convertitori da incasso
352
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.4
Regolazione Vdc
Descrizione
In caso di sovratensione o sottotensione del circuito intermedio, la funzione "Regolazione
Vdc" permette di reagire con misure appropriate.
● Sovratensione nel circuito intermedio
– Causa tipica:
l'azionamento lavora in modo generatorico e immette troppa energia nel circuito
intermedio.
– Rimedio:
riducendo la coppia generatorica la tensione del circuito intermedio viene mantenuta
entro i limiti consentiti.
Nota
Anomalia F30002 "Sovratensione circuito intermedio"
Qualora alla disattivazione o alla variazione rapida del carico si verifichi di frequente
un guasto con l'anomalia F30002 "Sovratensione circuito intermedio", l'aumento del
fattore di guadagno per il regolatore Vdc p1250 (p1290), ad esempio da "1,00" a
"2,00", potrebbe apportare un miglioramento.
● Sottotensione nel circuito intermedio
– Causa tipica:
interruzione della tensione di rete o dell'alimentazione al circuito intermedio.
– Rimedio:
tramite la preimpostazione di una coppia generatorica per l'azionamento in rotazione
vengono compensate le perdite esistenti e viene stabilizzata la tensione nel circuito
intermedio. Questo processo viene definito bufferizzazione cinetica.
La bufferizzazione cinetica può essere mantenuta solo fino a quando è disponibile
l'energia generata dal movimento dell'azionamento.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
353
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Caratteristiche
● Regolazione Vdc
– Viene composta in modo indipendente dalle regolazioni Vdc massima e minima
(bufferizzazione cinetica).
– Contiene un regolatore PI comune. Con il fattore di dinamica viene effettuata
un'impostazione delle regolazioni di Vdc_min e Vdc_max reciprocamente
indipendente.
● Regolazione Vdc minima (bufferizzazione cinetica)
– In caso di temporanea caduta di rete, con questa funzione viene utilizzata l'energia
cinetica del motore per la bufferizzazione della tensione del circuito intermedio e
l'azionamento viene ritardato.
● Regolazione Vdc_max
– Con questa funzione viene gestito un carico nel funzionamento come generatore di
breve durata senza disinserzione con "Sovratensione nel circuito intermedio".
– La regolazione Vdc_max ha senso solo nel caso di alimentazione senza regolazione
attiva del circuito intermedio e senza alimentazione di recupero.
Descrizione regolazione Vdc_min (bufferizzazione cinetica)
Figura 9-4
Attivazione/disattivazione della regolazione Vdc minima (bufferizzazione cinetica)
Convertitori da incasso
354
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Nota
Attivazione della bufferizzazione cinetica
L'attivazione della bufferizzazione cinetica è ammessa soltanto se i componenti opzionali
(TM31, SMC30, VSM, …) vengono alimentati da una sorgente di tensione esterna!
Se la regolazione Vdc minima viene abilitata con p1240 = 2,3 (p1280), in caso di
interruzione di rete dopo il mancato superamento della soglia di inserzione Vdc minima
r1246 (r1286) viene attivata la regolazione Vdc minima. Nel complesso l'energia
generatorica (di frenatura) dell'azionamento viene utilizzata durante la riduzione dei giri del
motore per supportare la tensione del circuito intermedio del convertitore. Questo significa
che con la regolazione Vdc_minima attivata i giri del motore non seguono più il valore di
riferimento principale, ma possono essere ridotti fino allo stato di fermo. L'azionamento
rimane in funzione finché la soglia di disinserzione della tensione del circuito intermedio
viene superata in negativo (vedere la figura "Attivazione/disattivazione della regolazione Vdc
minima" <1>).
Nota
Dati di parametrizzazione tra parentesi
Tutti i dati di parametrizzazione tra parentesi si riferiscono al controllo U/f.
Differenza tra il controllo U/f e la regolazione del numero di giri:
● Controllo U/f
Il regolatore Vdc_min agisce sul canale del valore di riferimento del numero di giri. Con la
regolazione Vdc_min attivata, la velocità di riferimento dell'azionamento si riduce al punto
che l'azionamento funziona in rigenerazione.
● Regolazione del numero di giri
Il regolatore Vdc_min agisce sull'uscita del regolatore di velocità e influisce sul valore di
riferimento di corrente formante la coppia. Con la regolazione Vdc_min attivata, il valore
di riferimento di corrente formante la coppia si riduce al punto che l'azionamento funziona
in rigenerazione.
Se si verifica una mancanza di rete, la tensione del circuito intermedio si riduce a causa
della mancata fornitura di energia dalla rete. Quando si raggiunge la soglia di tensione del
circuito intermedio impostata su un valore superiore al parametro p1245 (p1285), il
regolatore Vdc_min viene attivato. Le funzioni PID del regolatore riducono il numero di giri
del motore in modo che l'energia generatorica dell'azionamento mantenga la tensione del
circuito intermedio al livello impostato in p1245 (p1285). L'energia cinetica dell'azionamento
ha quindi un'importanza fondamentale per la perdita di giri del motore, oltre che per la durata
della bufferizzazione. Mentre la bufferizzazione di un azionamento con massa volanica (ad
es. ventilatore) può richiedere molti secondi, una massa volanica ridotta (ad es. pompe)
sull'azionamento limita il tempo di bufferizzazione a un intervallo di 100 – 200 ms. Il ripristino
della rete disattiva il regolatore Vdc_min e imposta il valore di riferimento dell'azionamento
sul generatore di rampa. Finché il regolatore Vdc_min è attivo, rimane visualizzato un avviso
A7402 (azionamento: regolatore minimo tensione circuito intermedio attivo).
Se l'azionamento non può più emettere energia generatorica, ad es. perché il numero di giri
è vicino allo stato di fermo, la tensione del circuito intermedio si riduce ulteriormente. Se la
tensione del circuito intermedio scende al di sotto del valore minimo (vedere la figura
"Attivazione/disattivazione della regolazione Vdc minima" <1>), l'azionamento si disinserisce
segnalando l'anomalia F30003 (parte di potenza: sottotensione circuito intermedio).
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
355
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Se con regolazione Vdc_min attiva si supera una soglia di numero di giri impostata con il
parametro p1257 (p1297) (vedere la figura "Attivazione/disattivazione della regolazione Vdc
minima" <2>), l'azionamento si disinserisce segnalando l'errore F7405 (azionamento:
superamento in negativo della velocità minima bufferizzazione cinetica).
Se nonostante la regolazione Vdc minima abilitata la sottotensione nel circuito intermedio
(F30003) provoca la disinserzione prima dell'arresto dell'azionamento, è necessario
eventualmente ottimizzare il regolatore tramite il fattore di dinamica p1247 (p1287). Un
incremento del fattore di dinamica in p1247 (p1287) causa un'inserzione più rapida del
regolatore. La preimpostazione di questo parametro dovrebbe tuttavia essere sufficiente per
la maggior parte delle applicazioni.
Tramite il parametro p1256 = 1 (p1296) si può attivare una sorveglianza del tempo di
bufferizzazione cinetica. Il tempo di sorveglianza può essere impostato nel parametro p1255
(p1295). Se la bufferizzazione (anche con mancanza di rete) richiede un tempo più lungo di
quello impostato, l'azionamento si disinserisce segnalando l'errore F7406 (azionamento:
superamento in negativo della durata massima di bufferizzazione cinetica). La reazione
all'anomalia segnalata da questo errore viene impostata in fabbrica su OFF3. Con questa
funzione viene eseguito l'arresto guidato di un azionamento in caso di mancanza di rete. In
questo caso, un livello troppo alto di energia generata dall'azionamento può essere
compensato da una resistenza di frenatura aggiuntiva.
Descrizione della regolazione Vdc_max
Figura 9-5
Attivazione/disattivazione della regolazione Vdc massima
Il livello di inserzione della regolazione Vdc_max (r1242 o r1282) si calcola nel modo
seguente:
● con rilevamento automatico disattivato del livello di inserzione (p1254 (p1294) = 0)
– Apparecchio ACAC: r1242 (r1282) = 1,15 x √2 x p0210 (tensione di allacciamento
dell'apparecchio)
– Apparecchio DCAC: r1242 (r1282) = 1,15 x p0210 (tensione di allacciamento
dell'apparecchio)
● con rilevamento automatico attivato livello di inserzione (p1254 (p1294) = 1)
r1242 (r1282) = Vdc_max - 50 V (Vdc_max: soglia di sovratensione del convertitore)
Convertitori da incasso
356
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Schema logico
FP 6220 (FP 6320)
Regolatore Vdc_max e regolatore Vdc_min
• p1240 (p1280)
Configurazione regolatore Vdc o sorveglianza Vdc
• r1242 (r1282)
Regolatore Vdc_max, livello d'inserzione
• p1243 (p1283)
Regolatore Vdc_max, fattore di dinamica
• p1245 (p1285)
Regolatore Vdc_min, livello di inserzione (bufferizzazione cinetica)
• r1246 (r1286)
Regolatore Vdc_min, livello di inserzione (bufferizzazione cinetica)
• p1247 (p1287)
Regolatore Vdc_min, fattore dinamica (bufferizzazione cinetica)
• (p1288)
Regolatore Vdc_max, fattore retroazione per generat. rampa (U/f)
• p1249 (p1289)
Soglia del numero di giri del regolatore Vdc_max
• p1250 (p1290)
Regolatore Vdc, guadagno proporzionale
• p1251 (p1291)
Regolatore Vdc, tempo dell'azione integratrice
• p1252 (p1292)
Regolatore Vdc, tempo di anticipo
• (p1293)
Regolatore Vdc_min, limitazione di uscita (U/f)
• p1254 (p1294)
Regolatore Vdc_max, acquisizione automatica livello ON
• p1255 (p1295)
Soglia temporale del regolatore Vdc minimo
• p1256 (p1296)
Regolatore Vdc_min, reazione (bufferizzazione cinetica)
• p1257 (p1297)
Soglia del numero di giri del regolatore Vdc minimo
• r1258 (r1298)
Uscita regolatore Vdc
Parametri
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
357
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.5
Riaccensione automatica (WEA)
Descrizione
La reinserzione automatica consente un ripristino dell'apparecchio dopo una disinserzione
dovuta alla mancanza o ad una caduta della rete. In questo caso avviene una tacitazione
automatica degli avvisi presenti e l'azionamento riprende automaticamente il funzionamento.
Per il riavviamento dell'azionamento si devono distinguere due diversi casi:
● L'avviamento normale dell'azionamento da una situazione di fermo.
● L'avviamento dell'azionamento con la funzione Riavviamento al volo.
Per azionamenti con bassi momenti di inerzia e basse coppie di carico che consentono
l'arresto nel giro di qualche secondo, ad es. pompe con colonna d'acqua, si consiglia
l'avviamento da fermo.
Nota
Azionamenti con momenti di inerzia elevati
Per azionamenti con coppie di inerzia molto elevate (ad es. comando di ventilatori) in
aggiunta può essere attivata la funzione Riavviamento al volo, che consente la
sincronizzazione con il motore ancora in rotazione.
AVVERTENZA
Pericolo di morte dovuto al movimento imprevisto del motore in caso di riavviamento
automatico
Se il p1210 è impostato su valori >1, il riavviamento del motore può avvenire
automaticamente anche senza il comando di ON.
Nel caso di lunghe mancanze di rete con la funzione di reinserzione automatica attiva
(p1210 > 1), l'azionamento può entrare in uno stato di fermo più lungo e può erroneamente
essere considerato disinserito.
Se si entra nel campo dell'azionamento in questo stato, si incorre nel pericolo di morte o di
gravi lesioni fisiche. Possono inoltre verificarsi danni materiali.
• Rispettare le avvertenze di sicurezza generali.
• Accertarsi che le funzioni di OFF di emergenza siano operative.
Convertitori da incasso
358
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Modo di reinserzione automatica
Tabella 9- 2
Modo di reinserzione automatica
p1210
Modo
Significato
0
Blocco reinserzione
automatica
Reinserzione automatica non attiva
1
Tacitazione di tutte le
anomalie senza
reinserzione
Con p1210 = 1 le anomalie presenti vengono tacitate
automaticamente se la loro causa viene eliminata. Se
compaiono nuovamente delle anomalie dopo la tacitazione,
anche queste vengono di nuovo tacitate automaticamente.
Tra la tacitazione e la ricomparsa di un'anomalia deve
intercorrere un tempo minimo di p1212 + 1s se il segnale
ON/OFF1 (parola di comando 1, bit 0) si trova su HIGH. Se
il segnale ON/OFF1 si trova sul livello LOW, tra la
tacitazione dell'anomalia e una nuova anomalia deve
trascorrere almeno 1 s. Con p1210 = 1 non viene generata
l'anomalia F07320 se fallisce il tentativo di tacitazione, ad
es. a causa di anomalie troppo frequenti.
4
Reinserzione dopo
mancanza rete senza altri
tentativi di avviamento
Con p1210 = 4 l'esecuzione del riavvio automatico avviene
soltanto se sul Motor Module si è verificata anche
l'anomalia F30003 o se sull'ingresso binettore p1208[1] si
trova un segnale High, oppure se, in caso dell'oggetto di
azionamento Alimentazione (A_Infeed), si è verificata
l'anomalia F06200. Eventuali ulteriori anomalie vengono a
loro volta tacitate e, ad eliminazione riuscita, viene ritentato
l'avvio. Un'interruzione dell'alimentazione di corrente 24 V
della CU viene interpretata come interruzione di rete.
6
Reinserzione dopo
anomalia con ulteriori
tentativi di avviamento
Con p1210 = 6 il riavvio automatico viene eseguito dopo
una qualsiasi anomalia oppure con p1208[0] = 1. Se le
anomalie si verificano in sequenza cronologica, il numero
dei tentativi di avvio viene determinato con il parametro
p1211. La sorveglianza temporale è impostabile tramite il
parametri p1213.
14
Reinserzione dopo interr.
rete dopo tacitazione
manuale
Come per p1210 = 4. Le anomalie presenti, tuttavia,
devono essere tacitate manualmente.
16
Reinserzione dopo
anomalia dopo tacitazione
manuale
Come per p1210 = 6. Le anomalie presenti, tuttavia,
devono essere tacitate manualmente.
Tentativi di avviamento (p1211) e tempo di attesa (p1212)
Tramite p1211 viene specificato il numero di tentativi di avviamento. Dopo ogni tacitazione di
anomalia, questo numero viene diminuito internamente (è necessario che la tensione di rete
sia nuovamente disponibile oppure che l'alimentazione sia pronta al funzionamento). Se è
esaurito il numero di tentativi di avviamento parametrizzati, viene segnalata l'anomalia
F07320.
Con p1211 = x vengono effettuati x + 1 tentativi di avviamento.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
359
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Nota
Inizio del tentativo di avviamento
Il tentativo di avviamento inizia subito dopo il verificarsi dell'anomalia.
La tacitazione automatica delle anomalie avviene in intervalli di tempo corrispondenti alla
metà del tempo di attesa di p1212.
Alla tacitazione riuscita e dopo il ripristino della tensione segue la reinserzione automatica.
Il tentativo di avviamento può considerarsi riuscito se il riavviamento al volo e la
magnetizzazione del motore (r0056.4 = 1) si sono conclusi e se dalla conclusione è decorso
un ulteriore secondo. Soltanto allora il contatore di avviamento viene riportato al valore
iniziale p1211.
Qualora tra una tacitazione riuscita e la fine di un tentativo di avviamento si verificassero
ulteriori anomalie, durante la relativa tacitazione, il contatore di avviamento viene a sua volta
decrementato.
Riaccensione automatica, tempo di sorveglianza ritorno di rete (p1213)
● p1213[0] = Tempo di sorveglianza per il riavvio
Il tempo di sorveglianza inizia con il rilevamento delle anomalie. Se le tacitazioni
automatiche non avvengono correttamente, il tempo di sorveglianza prosegue. Se,
decorso il tempo di sorveglianza, l'avviamento dell'azionamento non è ancora riuscito (il
riavviamento al volo e la magnetizzazione del motore devono essere completati: r0056.4
= 1), viene segnalata l'anomalia F07320.
Con p1213 = 0 viene disattivata la sorveglianza. Se p1213 viene impostato ad un valore
inferiore alla somma di p1212, del tempo di magnetizzazione p0346 nonché del tempo di
attesa supplementare dovuto al riavviamento al volo, l'anomalia F07320 viene generata
ad ogni processo di reinserzione. Se nel parametro p1210 = 1, il tempo in p1213 viene
impostato su un valore inferiore a p1212, l'anomalia F07320 viene generata anche in
questo caso ad ogni processo di reinserzione.
Qualora la tacitazione immediata delle anomalie non fosse possibile (ad es. in caso di
anomalie presenti in modo permanente), è necessario prolungare il tempo di
sorveglianza.
Per p1210 = 14, 16 la tacitazione manuale degli errori deve avvenire entro il tempo
definito in p1213[0]. altrimenti si verifica l'anomalia F07320 dopo che è trasporto il tempo
impostato.
● p1213[1] = Tempo di sorveglianza per resettare il contatore di avviamento
Il contatore di avviamento (vedere r1214) viene riportato al valore iniziale p1211 solo una
volta trascorso il tempo indicato in p1213[1] dopo una reinserzione riuscita. Il tempo di
attesa non ha effetto in caso di tacitazione dell'errore senza una reinserzione automatica
(p1210 = 1). Dopo l'interruzione dell'alimentazione (blackout), il tempo d'attesa inizia a
scorrere solo dopo il ripristino della rete e l'avviamento della Control Unit. Il contatore di
avviamento viene impostato a p1211 quando si verifica l'errore F07320, il comando di
inserzione si annulla e l'anomalia è tacitata.
Il contatore di avviamento viene automaticamente aggiornato se si modifica il valore
iniziale p1211 o la modalità p1210.
Convertitori da incasso
360
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Anomalie senza reinserzione automatica (p1206)
Tramite p1206[0...9] si possono selezionare fino a 10 numeri di anomalia per i quali la
reinserzione automatica non deve agire.
Il parametro è attivo solo con p1210 = 6 e p1210 = 16.
Parametri
• p1206[0...9]
Anomalie senza reinserzione automatica
• p1210
Modo resinserzione automatica
• p1211
Reinserzione automatica, tentativi di avviamento
• p1212
Reinserzione automatica, tempo di attesa tentativo avviamento
• p1213
Reinserzione automatica, tempo di sorveglianza
• r1214
Stato reinserzione automatica
Impostazioni
Per non avviare il motore in contrapposizione di fase durante la reinserzione
dell'azionamento, innanzitutto viene atteso il tempo di smagnetizzazione del motore (t = 2,3
x costante di tempo di magnetizzazione del motore). E' necessario attendere questo tempo
prima che venga abilitato l'invertitore e che venga fornita tensione al motore.
9.2.6
Avvio al volo
Descrizione
La funzione "Riavviamento al volo", abilitata tramite p1200, permette di avviare il convertitore
su un motore ancora in rotazione. Durante l'inserzione del convertitore senza riavviamento al
volo non verrebbe generato alcun flusso nel motore in fase di rotazione. Poiché il motore
senza flusso non genera coppia, si può verificare una disinserzione provocata da
sovracorrente (F07801).
Il riavviamento al volo rileva innanzitutto il numero di giri dell'azionamento con cui è stato
inizializzato il controllo U/f o la regolazione vettoriale. In questo modo la frequenza del
convertitore viene sincronizzata con la frequenza del motore.
Con l’inserzione “normale” del convertitore si presuppone che il motore sia fermo e che il
convertitore esegua l'accelerazione del motore dallo stato di fermo e con il numero di giri
impostato sul valore di riferimento. In molti casi, però, questo requisito non è soddisfatto.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
361
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Si devono distinguere due casi:
1. L'azionamento ruota a causa di influenze esterne come ad esempio flussi d'acqua di
pompe oppure correnti d'aria di ventilatori. In questo caso l'azionamento potrebbe anche
ruotare in senso opposto.
2. L'azionamento ruota a causa di una precedente disinserzione, ad es. OFF2, oppure
mancanza rete. A causa dell'energia cinetica accumulata nella catena cinematica,
l'azionamento ruota lentamente (esempio: ventilatori a tiraggio indotto con momento di
inerzia elevato e curva caratteristica del carico in forte calo nel campo di giri inferiore).
L'inizio del riavviamento al volo avviene indipendentemente dall'impostazione selezionata
(p1200):
● dopo il ripristino della rete con la reinserzione automatica attivata,
● dopo la disinserzione tramite il comando OFF2 (blocco impulsi) con la reinserzione
automatica attivata,
● durante l'applicazione del comando ON.
Nota
Applicazioni per la funzione Riavviamento al volo
La funzione di riavviamento al volo deve essere utilizzata nei casi in cui il motore è
possibilmente ancora in rotazione oppure viene azionato dal carico. In caso contrario si
verificano disinserzioni provocate da sovracorrente (F7801).
Nota
Avvertenze per la funzione Riavviamento al volo
Un valore maggiore del parametro p1203 (fattore del numero di giri di ricerca) determina una
curva di ricerca più piatta e, di conseguenza, un tempo di ricerca più lungo. Un valore
inferiore ha l'effetto contrario.
Nei motori con momento di inerzia ridotto, l’riavviamento al volo può contribuire a
un'accelerazione insignificante dell'azionamento.
Negli azionamenti di gruppo, il riavviamento al volo non deve essere attivato a causa dei
diversi comportamenti dei singoli motori.
9.2.6.1
Riavviamento al volo senza encoder
Descrizione
In funzione del parametro p1200, al termine del tempo di diseccitazione p0347 inizia il
riavviamento al volo con velocità di ricerca massima nRicerca,max (vedere la figura
"Riavviamento al volo").
nRicerca,max = 1,25 x nmax (p1082)
La procedura di riavviamento al volo è diversa per il controllo U/f e la regolazione vettoriale:
● Caratteristica U/f (p1300 < 20):
con la velocità di ricerca ricavata dal parametro p1203, la frequenza corrispondente si
riduce in funzione della corrente del motore. In questo modo viene impressa la corrente
Convertitori da incasso
362
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
di ricerca parametrizzabile p1202. Se la corrente di ricerca è vicina alla frequenza del
rotore, viene impostato un minimo di corrente. Con la frequenza rilevata viene infine
effettuata la magnetizzazione del motore. Durante la magnetizzazione (p0346), la
tensione di uscita aumenta fino a raggiungere il valore della tensione derivante dalla
curva caratteristica U/f (vedere la figura "Riavviamento al volo").
● Regolazione vettoriale senza encoder del numero di giri:
il rilevamento del numero di giri del motore avviene tramite l'anello di regolazione della
velocità del modello di motore elettrico. In questo modo viene innanzitutto applicata la
corrente di ricerca (p1202) e quindi viene avviato il regolatore a partire dalla frequenza di
ricerca massima. La dinamica del regolatore viene influenzata tramite il fattore della
velocità di ricerca (p1203). Se gli scostamenti del regolatore del numero di giri sono
sufficientemente contenuti, si prosegue con la magnetizzazione di durata parametrizzata
in p0346.
Al termine del tempo di eccitazione p0346, il generatore di rampa viene impostato sul valore
reale del numero di giri e il motore funziona alla frequenza di riferimento attuale.
Figura 9-6
Riavviamento al volo
AVVERTENZA
Pericolo di vita dovuto al movimento imprevisto del motore con Riavviamento al volo
attivato
Con il riavviamento al volo attivato (p1200) l'azionamento potrebbe essere accelerato dalla
corrente di ricerca nonostante lo stato di fermo e il valore di riferimento a 0.
In questo stato, l'accesso alla zona di lavoro del motore può causare incidenti mortali, gravi
lesioni personali o danni materiali.
• Rispettare le avvertenze di sicurezza generali.
• Accertarsi che le funzioni di OFF di emergenza siano operative.
Nota
Riavviamento al volo senza encoder con motori sincroni ad eccitazione permanente
Il riavviamento al volo senza encoder con motori sincroni ad eccitazione permanente è
possibile solo con l'impiego di un Voltage Sensing Module VSM10 per il rilevamento della
velocità del motore.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
363
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Riavviamento al volo senza encoder in caso di cavi lunghi
In presenza di cavi motore lunghi, il comportamento descritto in precedenza può provocare
problemi durante il riavviamento al volo. In questi casi le impostazioni seguenti possono
migliorare il riavviamento al volo:
● Immissione della resistenza dei cavi nel parametro p0352 prima dell'identificazione dati
del motore.
● Impostazione del parametro p1203 a minimo 300 %.
In questo modo il riavviamento al volo dura più a lungo che con valori inferiori a 300 %.
Nota
Ottimizzazione della funzione Riavviamento al volo
Per ottimizzare il riavviamento al volo la funzione andrebbe controllata con una registrazione
Trace. Eventualmente si può migliorare il risultato impostando i parametri p1202 e p1203.
Riavviamento al volo veloce (solo per motori asincroni)
Nel funzionamento senza encoder (regolazione vettoriale, controllo U/f lineare e parabolico)
è possibile attivare la funzione "Riavviamento al volo veloce". Nel riavviamento al volo
veloce la frequenza iniziale viene impostata a zero.
Con questo metodo il riavviamento al volo avviene correttamente in un intervallo di tempo di
circa 200 ms.
Il riavviamento al volo veloce funziona solo alle condizioni seguenti:
● con un tempo di ciclo del regolatore di corrente di 250 μs o 400 μs (senza filtro sul lato
motore e senza cavi lunghi)
● fino a 4 volte il numero di giri nominale in caso di regolazione vettoriale
● fino al numero di giri nominale in caso di regolazione U/f
Nota
Il "Riavviamento al volo veloce" è possibile solo con i motori asincroni.
Nella Lista esperti si eseguono le impostazioni per il riavviamento al volo veloce.
1. Il metodo "Riavviamento al volo veloce" viene selezionato con impostando p1780.11 = 1.
Nel funzionamento con encoder le impostazioni di questo bit vengono ignorate dato che il
riavviamento al volo veloce non è possibile.
2. Il riavviamento al volo veloce viene attivato con il parametro p1200 come il riavviamento
al volo normale.
3. Per determinare la resistenza dei cavi occorre eseguire un'identificazione dei dati motore
nello stato di fermo (p1900 = 2).
I parametri critici sono la resistenza statorica del motore (p0350) e l'induttanza di
dispersione statorica del motore (p0356).
Convertitori da incasso
364
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Per il riavviamento al volo veloce esistono i seguenti bit di visualizzazione:
● Nel funzionamento U/f: r1204.14 (riavviamento al volo veloce inserito).
● Nella regolazione vettoriale: r1205.16 (riavviamento al volo veloce inserito) o r1205.17
(riavviamento al volo veloce terminato).
Nota
La corrente di ricerca non deve essere troppo bassa
In caso di problemi con il riavviamento al volo veloce può essere utile impostare la corrente
di ricerca (p1202) a valori > 30 %. Potrebbero verificarsi dei problemi se l'azionamento viene
fatto funzionare molto nel deflussaggio di campo oppure con filtri sul lato motore o cavi
lunghi.
Riavviamento al volo rapido con rilevamento della tensione tramite VSM10
Il tempo di attivazione su una macchina asincrona rotante può essere abbreviato se viene
misurata la tensione sui morsetti del motore.
Impostazioni per il riavviamento al volo rapido con rilevamento della tensione:
1. Selezionare la misura di tensione per il riavviamento al volo rapido: p0247.5 = 1.
2. Attivare il riavviamento al volo: p1200 > 0.
I seguenti bit di stato mostrano la progressione del riavviamento al volo:
1. Nel funzionamento U/f: r1204.15
2. Nella regolazione vettoriale: r1205.18, r1205.19, r1205.20
Nota
L'ampiezza di tensione non deve essere troppo esigua
Se l'ampiezza della tensione misurata scende sotto il limite dell'1 % della tensione nominale
del convertitore, il riavviamento al volo con rilevamento della tensione viene disattivato e
viene cercata la velocità del motore.
9.2.6.2
Avvio al volo con encoder
Descrizione
La procedura di riavviamento al volo è diversa per il controllo U/f e la regolazione vettoriale:
● Curva caratteristica U/f (p1300 < 20):
procedura come per il riavviamento al volo senza encoder (vedere il capitolo
"Riavviamento al volo senza encoder")
● Regolazione vettoriale con encoder del numero di giri:
poiché il numero di giri è già noto, si può immediatamente proseguire con la
magnetizzazione alla relativa frequenza. La durata del processo di magnetizzazione è
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
365
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
indicata in p0346. Al termine del tempo di eccitazione, il generatore di rampa viene
impostato sul valore reale del numero di giri e il motore funziona al numero di giri di
riferimento attuale.
AVVERTENZA
Pericolo di vita dovuto al movimento imprevisto del motore con Riavviamento al volo
attivato
Con il riavviamento al volo attivato (p1200) l'azionamento potrebbe essere accelerato
dalla corrente di ricerca nonostante lo stato di fermo e il valore di riferimento a 0.
In questo stato, l'accesso alla zona di lavoro del motore può causare incidenti mortali,
gravi lesioni personali o danni materiali.
• Rispettare le avvertenze di sicurezza generali.
• Accertarsi che le funzioni di OFF di emergenza siano operative.
9.2.6.3
Parametro
• p0352
Resistenza cavo
• p1200
Riavviamento al volo, modo operativo
• 0: Riavviamento al volo inattivo
• 1: Riavviamento al volo sempre attivo (avvio in direzione val. rif.)
• 2: Riavviamento al volo attivo dopo ON, errore, OFF2 (avvio in direzione
val. rif.)
• 3: Riavviamento al volo attivo dopo errore, OFF2 (avvio in direzione val.
rif.)
• 4: Riavviamento al volo sempre attivo (avvio solo in dir. val.rif.)
• 5: Riavviamento al volo attivo dopo ON, errore, OFF2 (avvio solo in direz.
val. rif.)
• 6: Riavviamento. volo att. dopo errore, OFF2 (avvio solo in dir. val.rif.)
• p1202
Riavviamento al volo, corrente di ricerca
• p1203
Riavviamento al volo, fattore velocità di ricerca
• r1204
Riavviamento al volo, controllo U/f, stato
• r1205
Riavviamento al volo, regolazione vettoriale, stato
Nota
Definizione della direzione di ricerca per il riavviamento al volo
Con p1200 = 1, 2, 3 vale: La ricerca avviene in entrambe le direzioni, l'avvio avviene in
direzione del valore di riferimento.
Con p1200 = 4, 5, 6 vale: La ricerca avviene solo in direzione del valore di riferimento.
Convertitori da incasso
366
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.7
Commutazione motore
9.2.7.1
Descrizione
La commutazione del set di dati del motore viene utilizzata ad esempio nei casi seguenti:
● commutazione di motori diversi
● adattamento dei dati motore
Nota
Commutazione a un motore in rotazione
Per una commutazione motore a un motore in rotazione occorre attivare la funzione
"Riavviamento al volo"
9.2.7.2
Esempio di commutazione motore di due motori
Presupposti
● La prima messa in servizio è conclusa.
● 2 set di dati del motore (MDS), p0130 = 2
● 2 set di dati dell'azionamento (DDS), p0180 = 2
● 2 uscite digitali per il comando dei contattori ausiliari
● 2 ingressi digitali per la sorveglianza dei contattori ausiliari
● 1 ingresso digitale per la selezione del set di dati
● 2 contattori ausiliari con contatti ausiliari (1 contatto normalmente aperto)
● 2 contattori del motore con contatti ausiliari a guida forzata (1 contatto normalmente
chiuso, 1 contatto normalmente aperto)
Figura 9-7
Esempio di commutazione motore
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
367
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Tabella 9- 3
Impostazioni per l'esempio di commutazione motore
Parametri
Impostazioni
Nota
p0130
2
Configurare 2 MDS
p0180
2
Configurare 2 DDS
p0186[0..1]
0, 1
Gli MDS vengono assegnati ai DDS.
p0820
Selezione ingresso digitale
tramite DDS
p0821 ... p0824
0
Viene selezionato l'ingresso digitale per una commutazione
motore tramite selezione DDS. La codifica è binaria (p0820 =
bit 0 ecc.).
p0826[0..1]
1, 2
Numeri diversi significano un modello termico differente.
p0827[0..1]
0, 1
Assegnazione dei bit da r0830 a MDS. Se, ad es., p0827[0] =
0, selezionando MDS0 tramite DDS0 viene impostato il bit
r0830.0.
r0830.0 e r0830.1
Uscite digitali contattori ausiliari
Le uscite digitali per i contattori ausiliari vengono assegnate
ai bit.
p0831[0..1]
Ingressi digitali contatti ausiliari
Gli ingressi digitali per la risposta dei contattori del motore
vengono assegnate ai bit.
p0833.00 e .01
0, 0
L'azionamento assume il controllo della commutazione dei
contattori e la cancellazione degli impulsi.
Sequenza della commutazione motore
1. Cancellazione degli impulsi:
Dopo la selezione di un nuovo set di dati dell'azionamento tramite p0820 ... p0824 viene
eseguita una cancellazione degli impulsi.
2. Apertura del contattore motore:
il contattore motore 1 viene aperto (r0830 = 0) e il bit di stato "Commutazione motore
attiva" (r0835.0) impostato.
3. Commutazione del set di dati dell'azionamento:
il set di dati richiesto viene attivato (r0051 = set di dati effettivo, r0837 = set di dati
richiesto).
4. Comando del contattore motore:
dopo la risposta (contattore motore aperto) del contattore motore 1 avviene
l'impostazione del relativo bit di r0830 e l'attivazione del contattore motore 2.
5. Abilitazione degli impulsi:
dopo la risposta (contattore motore chiuso) del contattore motore 2, il bit "commutazione
set di dati motore attiva" (r0835.0) viene reimpostato e gli impulsi abilitati. La
commutazione motore è conclusa.
9.2.7.3
Schema logico
FP 8565
Record di dati dell'azionamento (Drive Data Set, DDS)
FP 8575
Record di dati del motore (Motor Data Set, MDS)
Convertitori da incasso
368
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.7.4
9.2.8
Parametro
• r0051
Set di dati dell'azionamento DDS attivo
• p0130
Quantità di set di dati motore (MDS)
• p0180
Quantità di set di dati dell'azionamento (DDS)
• p0186
Numero set di dati motore (MDS)
• p0819[0...2]
Copia di un set di dati dell'azionamento (DDS)
• p0820
BI: Selezione set di dati dell'azionamento DDS bit 0
• p0821
BI: Selezione set di dati dell'azionamento DDS bit 1
• p0822
BI: Selezione set di dati dell'azionamento DDS bit 2
• p0823
BI: Selezione set di dati dell'azionamento DDS bit 3
• p0824
BI: Selezione set di dati dell'azionamento DDS bit 4
• p0826
Commutazione motore, numero motore
• p0827
Commutazione motore, parola di stato, numero di bit
• p0828
Commutazione motore, segnalazione di risposta
• r0830
Commutazione motore, stato
• p0831
Commutazione motore, segnalazione di risposta contattore
• p0833
Commutazione del set di dati, configurazione
Caratteristica di attrito
Descrizione
La caratteristica di attrito serve a compensare la coppia di attrito del motore e della
macchina operatrice. Una caratteristica di attrito consente il precomando del regolatore di
velocità e migliora il comportamento di controllo.
Per la caratteristica di attrito vengono utilizzati 10 punti di interpolazione. Le coordinate di
ogni punto di interpolazione sono descritte da un parametro del numero di giri (p382x) e uno
di coppia (p383x) (punto di interpolazione 1 = p3820 e p3830, punto di interpolazione 10 =
p3829 e p3839).
Caratteristiche
● Sono disponibili 10 punti di supporto per la raffigurazione della curva caratteristica di
attrito.
● Una funzione automatica supporta la registrazione della caratteristica di attrito (record
caratteristica di attrito).
● È possibile interconnettere un'uscita connettore (r3841) come coppia di attrito (p1569).
● La caratteristica di attrito può essere attivata e disattivata (p3842)
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
369
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Messa in servizio
In p382x vengono preassegnati, durante la prima messa in servizio, i numeri di giri per la
misura in funzione del numero di giri massimo p1082. È possibile modificarle a seconda
delle esigenze.
Tramite p3845 è possibile attivare la registrazione (record) automatica della caratteristica di
attrito. La registrazione della curva caratteristica avviene alla successiva abilitazione.
Sono possibili le seguenti impostazioni:
• p3845 = 0
Caratteristica di attrito, record disattivato
• p3845 = 1
Caratteristica di attrito, record attivato, tutte le direzioni
La caratteristica di attrito viene rilevata in entrambi i sensi di rotazione. Il
risultato della misurazione positiva e negativa viene calcolato come media
e registrato in p383x.
• p3845 = 2
Caratteristica di attrito, registraz. attivata, direz. positiva
• p3845 = 3
Caratteristica di attrito, registraz. attivata, direz. negativa
Con p3847 (caratteristica di attrito, registrazione tempo di riscaldamento) si può impostare
un tempo per il riscaldamento dell'azionamento fino al raggiungimento della temperatura di
esercizio. In questo tempo viene raggiunto e mantenuto il numero di giri più alto impostato
per la registrazione della caratteristica di attrito affinché l'azionamento raggiunga la
temperatura di esercizio. Dopodiché inizia la misura alla velocità massima.
AVVERTENZA
Pericolo di vita dovuto al movimento imprevisto del motore durante la registrazione della
caratteristica di attrito
Durante la registrazione della caratteristica di attrito, l'azionamento causa movimenti del
motore che raggiungono il numero di giri massimo del motore stesso.
Se si entra nel campo dell'azionamento in questo stato, si incorre nel pericolo di morte o di
gravi lesioni fisiche. Possono inoltre verificarsi danni materiali.
• Rispettare le avvertenze di sicurezza generali.
• Accertarsi che le funzioni di OFF di emergenza siano operative.
Schema logico
FP 7010
Caratteristica di attrito
Convertitori da incasso
370
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Parametri
• p3820
Caratteristica di attrito, valore n0
• ...
• p3839
Caratteristica di attrito, valore M9
• r3840
Caratteristica di attrito, parola di stato
• r3841
Uscita caratteristica di attrito
• p3842
Caratteristica di attrito, attivazione
• p3843
Caratteristica attrito, tempo livell., differ. coppia di attrito
• p3844
Caratteristica di attrito, num., punto di commutazione superiore
• p3845
Caratteristica di attrito, attivazione record
• p3846
Caratter. di attrito, registrazione tempo di acceler./deceler.
• p3847
Caratteristica di attrito, registrazione tempo di riscaldamento
9.2.9
Frenatura mediante cortocircuito dell'indotto, frenatura in corrente continua
9.2.9.1
Informazioni generali
La funzione "Cortocircuito esterno dell'indotto" per motori sincroni ad eccitazione
permanente, in caso di cancellazione impulsi, comanda un contattore che provvede a
cortocircuitare il motore tramite resistenze. In questo modo si riduce l'energia cinetica del
motore.
La funzione "Cortocircuito interno dell'indotto" per i motori sincroni ad eccitazione
permanente controlla la potenza assorbita del motore cortocircuitando un mezzo ponte nella
parte di potenza e funge quindi da freno del motore.
La funzione "Freno in corrente continua" per i motori asincroni imprime una corrente
continua nel motore e in questo modo lo frena.
9.2.9.2
Frenatura esterna mediante cortocircuito dell'indotto
Descrizione
La frenatura esterna mediante cortocircuito dell'indotto è disponibile soltanto nei motori
sincroni. È necessaria soprattutto per frenare in caso di pericolo, quando non è più possibile
la frenatura regolata tramite il convertitore (ad es. in caso di mancanza della tensione di rete,
OFF di emergenza, ecc.) oppure quando non viene usato un alimentatore senza
rigenerazione. Gli avvolgimenti dello statore del motore vengono cortocircuitati o tramite
resistenze di frenatura esterne. Nel circuito motore si crea così una resistenza aggiuntiva
che facilita la perdita di energia cinetica del motore.
L'attivazione del cortocircuito esterno dell'indotto avviene tramite p1231 = 1 (con risposta del
contattore) oppure tramite p1231 = 2 (senza risposta del contattore). Esso viene attivato
quando gli impulsi sono stati soppressi.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
371
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Questa funzione controlla, tramite morsetti di uscita, un contattore esterno, che in caso di
cancellazione impulsi provvede a cortocircuitare il motore tramite resistenze.
La condizione per poter utilizzare il cortocircuito esterno dell'indotto è l'impiego di un motore
sincrono ad eccitazione permanente (p0300 = 2xx).
ATTENZIONE
Danni materiali a causa dell'uso di motori non resistenti ai cortocircuiti
Se vengono utilizzati motori non resistenti ai cortocircuiti, i motori possono essere
danneggiati con l'attivazione della frenatura mediante cortocircuito dell'indotto esterna.
• Utilizzare solo motori resistenti a cortocircuito.
• Utilizzare resistenze adeguate per cortocircuitare il motore.
Nota
Conseguenze di una parametrizzazione errata
In caso di parametrizzazione errata (ad es. avendo selezionato motore asincrono e
cortocircuito esterno dell'indotto) viene emessa l'anomalia F07906 "Cortocircuito
dell'indotto/protezione di tensione interna: Parametrizzazione errata".
Schema logico
FP 7014
Funzioni tecnologiche - Cortocircuito esterno dell'indotto
• p0300
Selezione del tipo di motore
• p1230
BI: Cortocircuito dell'indotto/frenatura in corrente continua, attivazione
• p1231
Configuraz. cortocirc. indotto esterno / frenatura in corr. continua
Parametri
• 1: Cortocircuito dell'indotto esterno con conferma contattore
• 2: Cortocircuito dell'indotto esterno senza conferma contattore
• p1235
BI: Cortocircuito esterno dell'indotto, risposta del contattore
• p1236
Tempo sorveglianza conferma contattore cortocirc. indotto est.
• p1237
Tempo di attesa cortocircuito dell'indotto esterno all'apertura
• r1238
CO: Cortocircuito esterno dell'indotto, stato
• r1239
CO/BO: Cortocircuito dell'indotto/frenatura in corrente continua, parola di stato
Convertitori da incasso
372
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.9.3
Frenatura interna mediante cortocircuito dell'indotto
Descrizione
La funzione di frenatura interna mediante cortocircuito dell'indotto è disponibile soltanto nei
motori sincroni. È necessaria soprattutto per frenare in caso di pericolo, quando non è più
possibile la frenatura regolata tramite il convertitore (ad es. in caso di mancanza della
tensione di rete, OFF di emergenza, ecc.) oppure quando non viene usato un alimentatore
senza rigenerazione. Gli avvolgimenti dello statore del motore vengono cortocircuitati tramite
un mezzo ponte nella parte di potenza. Nel circuito motore si crea così una resistenza
aggiuntiva che facilita la perdita di energia cinetica del motore.
Il cortocircuito interno dell'indotto viene configurato mediante p1231 = 4 e attivato mediante
p1230. Esso viene attivato quando gli impulsi sono stati soppressi.
La condizione per poter utilizzare il cortocircuito interno dell'indotto è l'impiego di un motore
sincrono ad eccitazione permanente (p0300 = 2xx).
PERICOLO
Pericolo di morte per folgorazione durante la frenatura mediante cortocircuito dell'indotto
Con un cortocircuito dell'indotto attivo tutti i morsetti motore si trovano, dopo la
cancellazione impulsi, a metà del potenziale del circuito intermedio.
Il contatto con elementi sotto tensione provoca la morte o gravi lesioni.
• Rispettare le avvertenze di sicurezza generali.
ATTENZIONE
Danni materiali a causa dell'uso di motori non resistenti ai cortocircuiti o di Power Module /
Motor Module progettato in modo errato
Se vengono utilizzati motori non resistenti a cortocircuito, i motori o il Power Module / Motor
Module possono essere danneggiati all'attivazione della frenatura mediante cortocircuito
dell'indotto interna.
• Utilizzare solo motori resistenti a cortocircuito.
• Utilizzare resistenze adeguate per cortocircuitare il motore.
• Progettare il Power Module / Motor Module per la corrente di cortocircuito del motore
moltiplicata per 1,8.
Schema logico
FP 7016
Funzioni tecnologiche - Cortocircuito interno dell'indotto
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
373
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Parametri
• p0300
Selezione del tipo di motore
• p1230
BI: Cortocircuito dell'indotto/frenatura in corrente continua, attivazione
• p1231
Configuraz. cortocirc. indotto esterno / frenatura in corr. continua
• 4: Cortocircuito indotto interno / frenatura in corrente continua
• r1239
9.2.9.4
CO/BO: Cortocircuito dell'indotto/frenatura in corrente continua, parola di stato
Frenatura in corrente continua
Descrizione
La funzione di frenatura in corrente continua è disponibile soltanto con i motori asincroni. È
necessaria soprattutto per frenare in caso di pericolo, quando non è più possibile la frenatura
regolata tramite il convertitore (ad es. in caso di mancanza della tensione di rete, OFF di
emergenza, ecc.) oppure quando non viene usato un alimentatore senza rigenerazione.
il freno in corrente continua viene attivato con p1231 = 4 o p1231 = 14. Può essere attivato
tramite un segnale d'ingresso p1230 (segnale = 1) o una reazione all'anomalia.
Attivazione della frenatura a corrente continua tramite segnale d'ingresso
p1231 = 4 (Cortocircuito interno dell'indotto/frenatura in DC)
Se la frenatura in corrente continua viene attivata con il segnale d'ingresso digitale,
innanzitutto vengono inibiti gli impulsi per il tempo di smagnetizzazione (p0347) del motore
per smagnetizzare il motore; il parametro p1234 (Numero di giri di avvio della frenatura in
corrente continua) non viene considerato.
Viene quindi impressa la corrente di frenatura (p1232) fino ad attivare l'ingresso per frenare il
motore o mantenerlo in stato di fermo.
p1231 = 14 (frenatura in corrente continua sotto il numero di giri iniziale)
La frenatura in corrente continua viene attivata se durante il funzionamento è presente un
segnale 1 sull'ingresso connettore p1230 e il numero di giri attuale è inferiore a quello
iniziale (p1234).
Dopo la smagnetizzazione del motore (p0347) viene impressa la corrente di frenatura p1232
per il tempo impostato in p1233 e quindi si verifica una disinserzione automatica.
Annullamento del segnale d'ingresso per la frenatura in corrente continua
Se si annulla l'azione della frenatura in corrente continua, l'azionamento ritorna al modo
operativo selezionato.
Ossia:
● con regolazione vettoriale (regolata con o senza encoder):
con la funzione "Riavviamento al volo" attivata l'azionamento viene sincronizzato con la
frequenza del motore e passa quindi nuovamente al funzionamento regolato. Se la
Convertitori da incasso
374
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
funzione "Riavviamento al volo" non è attivata, l'azionamento può essere avviato soltanto
dallo stato di fermo senza errori di sovracorrente.
● con funzionamento U/f:
con la funzione "Riavviamento al volo" attivata, la frequenza del convertitore viene
sincronizzata con la frequenza del motore e l'azionamento passa al funzionamento U/f.
Se la funzione "Riavviamento al volo" non è attivata, l'azionamento può essere avviato
soltanto dallo stato di fermo senza errori di sovracorrente.
Frenatura in corrente continua come reazione all'anomalia
Attivazione tramite p0491 = 4, p2101 = 6 (cortocircuito dell'indotto interno/frenatura in
corrente continua)
Se la frenatura in corrente continua è attivata come reazione all'anomalia, il motore viene
dapprima frenato con orientamento di campo secondo la rampa di frenatura fino alla soglia
in p1234 (Numero di giri di avvio della frenatura in corrente continua). La pendenza della
rampa è identica a quella della rampa OFF1 (impostabile tramite p1082, p1121). Vengono
quindi inibiti gli impulsi per la durata p0347 (Tempo di smagnetizzazione) del motore per
smagnetizzare il motore. In seguito inizia la frenatura in corrente continua per la durata
impostata in p1233 (Durata frenatura in corrente continua).
● Se è presente un encoder, la frenatura dura finché i giri non scendono sotto la soglia di
fermo p1226.
● Se non vi sono encoder, la durata è quella definita nel parametro p1233.
Attivazione tramite p1231 = 5 (frenatura in corrente continua con OFF1/OFF3)
Con OFF1 o OFF3 si attiva la frenatura in corrente continua
● Quando il numero di giri del motore è ≥ p1234, il motore viene rallentato fino a p1234.
Appena il numero di giri del motore è < p1234, gli impulsi vengono bloccati e il motore
viene smagnetizzato.
● Se il numero di giri del motore è già < p1234 in caso di OFF1/OFF3, gli impulsi vengono
bloccati immediatamente e il motore viene smagnetizzato.
La frenatura in corrente continua viene attivata per la durata impostata in p1233 (Durata
della frenatura in corrente continua) e quindi disattivata.
Se OFF1/OFF3 viene annullato anticipatamente, riprende il funzionamento normale.
Resta attiva la frenatura in corrente continua come frenatura di emergenza di una reazione
all'anomalia.
Schema logico
FP 7017
Funzioni tecnologiche - Frenatura in corrente continua
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
375
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Parametri
• p0300
Selezione del tipo di motore
• p0491
Encoder motore reazione all'anomalia ENCODER
• p1226
Riconoscimento di fermo, soglia di numero di giri
• p1230
BI: Cortocircuito dell'indotto/frenatura in corrente continua, attivazione
• p1231
Configuraz. cortocirc. indotto esterno / frenatura in corr. continua
• 4: Cortocircuito indotto interno / frenatura in corrente continua
• 5: Frenatura in corrente continua con OFF1/OFF3
• 14: Frenatura in corrente continua sotto il numero di giri iniziale
• p1232
Corrente di frenatura frenatura in corrente continua
• p1233
Durata frenatura in corrente continua
• p1234
Numero di giri di avvio della frenatura in corrente continua
• r1239
CO/BO: Cortocircuito dell'indotto/frenatura in corrente continua, parola di stato
• p1345
Regolatore di tensione I_max, guadagno proporzionale
• p1346
Tempo integrale regolatore di tensione I_max.
• p2101
Impostazione reazione all'anomalia
9.2.10
Aumento della frequenza di uscita
9.2.10.1
Descrizione
Per le applicazioni che richiedono frequenze di uscita maggiori può essere necessario
incrementare la frequenza impulsi del convertitore.
Allo stesso modo può essere necessario modificare la frequenza impulsi, in modo da evitare
possibili fenomeni di risonanza.
Poiché l'aumento della frequenza impulsi determina un incremento delle perdite di
commutazione, in fase di dimensionamento dell'azionamento va considerato un fattore di
"derating" per la corrente di uscita.
Dopo l'incremento della frequenza impulsi vengono automaticamente applicate le nuove
correnti di uscita nel calcolo della protezione della parte di potenza.
Nota
Impiego di un filtro sinusoidale
L'impiego di un filtro sinusoidale deve essere selezionato durante la messa in servizio
tramite p0230 = 3 oppure p0230 = 4. In questo modo la frequenza di uscita viene impostata
su 4 kHz o 2,5 kHz; questo valore non può essere modificato.
Convertitori da incasso
376
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.10.2
Frequenze degli impulsi preimpostate
Le frequenze impulsi preimpostate in fabbrica e riportate di seguito permettono di ottenere le
frequenze di uscita massime indicate.
Tabella 9- 4
Frequenza di uscita massima con la frequenza impulsi preimpostata
Potenza del convertitore
[kW]
Frequenza impulsi preimpostata
[kHz]
Frequenza di uscita max.
[Hz]
Tensione di rete 3 AC 380 ... 480 V
110 ... 250
2
160
315 ... 560
1,25
100
Tensione di rete 3 AC 500 ... 600 V
110 ... 560
1,25
100
Tensione di rete 3 AC 660 ... 690 V
75 ... 800
1,25
100
Le frequenze impulsi impostate in fabbrica rappresentano anche la frequenza minima.
I tempi di campionamento per gli ingressi e le uscite della morsettiera utente TM31 sono
impostati in fabbrica a 4000 µs; questo è anche il valore minimo.
9.2.10.3
Aumento della frequenza impulsi
Descrizione
È possibile aumentare la frequenza impulsi a un valore compreso tra la frequenza impulsi
preimpostata in fabbrica e la frequenza impulsi massima impostabile in modo quasi
continuo.
Procedura
1. Il parametro p0009 sulla Control Unit deve essere impostato a 3 "Configurazione base
azionamento".
2. Il parametro p0112 "Preimpostazione tempi di campionamento p0115" del DO VECTOR
deve essere impostato a 0 "Esperti".
3. In p0113 può essere immessa una frequenza impulsi qualsiasi compresa tra 1 kHz e 2
kHz. Nel caso in cui occorra impostare una frequenza impulsi superiore (ad es. 2,2 kHz),
questo valore deve essere diviso per 2 o per 4, in modo che il risultato sia compreso tra
1 kHz e 2 kHz (ad es. 2,2 kHz diviso per 2 dà 1,1 kHz).
4. Nel parametro p0113 non vengono accettate tutte le frequenze impulsi, nel qual caso
viene emesso l'avviso "Valore non ammesso".
5. Se la frequenza immessa nel parametro p0113 non è accettata, nel parametro r0114[0]
viene proposta una frequenza che si discosta solo di alcuni Hertz da quella immessa.
Questa frequenza deve quindi essere immessa in p0113.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
377
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
6. Dopo l'applicazione della frequenza immessa in p0113, occorre reimpostare il parametro
p0009 sulla Control Unit a 0 "Pronto".
7. La Control Unit si reinizializza. Dopo l'avvio è possibile immettere nel parametro p1800
"Frequenza impulsi" del DO VECTOR le frequenze impulsi proposte in r0114[i] (i = 1, 2,
...).
Nota
Immissione della frequenza impulsi
La frequenza impulsi immessa in p1800 deve essere identica al valore in r0114[i],
altrimenti l'immissione non viene accettata.
9.2.10.4
Frequenza di uscita massima all'aumento della frequenza degli impulsi
Moltiplicando per numeri interi la frequenza degli impulsi di base, si ottengono le seguenti
frequenze di uscita tenendo conto dei fattori di derating:
Tabella 9- 5
1)
9.2.10.5
Frequenza di uscita massima all'aumento della frequenza degli impulsi
Frequenza impulsi
[kHz]
Frequenza di uscita max.
[Hz]
1,25
100
2
160
2,5
200
≥4
300 1)
Mediante la regolazione la frequenza di uscita massima viene limitata a 300 Hz.
Parametro
• p0009
Messa in servizio dell'apparecchio, filtro parametri
• p0112
Preimpostazione tempi di campionamento p0115
• p0113
Selezione frequenza impulsi minima
• p0115
Tempi di campionamento
• p1800
Frequenza impulsi
Convertitori da incasso
378
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.11
Comportamento di derating in presenza di elevata frequenza impulsi
Descrizione
Al fine di ridurre la rumorosità motore o di aumentare la frequenza di uscita, è possibile
aumentare la frequenza impulsi rispetto alle impostazioni di fabbrica.
L'aumento della frequenza impulsi provoca normalmente una riduzione della corrente di
uscita massima (ved. "Dati tecnici/Derating di corrente a seconda della frequenza impulsi").
Alla messa in servizio del convertitore, il comportamento in caso di sovraccarico viene
impostato automaticamente in modo tale che la frequenza impulsi venga ridotta in maniera
variabile, così da produrre la potenza desiderata.
Proprietà:
● A seconda dell'impostazione del parametro p0290, si verifica una reazione al
sovraccarico:
– p0290 = 0: Riduzione corrente di uscita o frequenza di uscita
– p0290 = 1: Nessuna riduzione, disinserzione al raggiungimento della soglia di
sovraccarico
– p0290 = 2: Riduzione corrente di uscita o frequenza di uscita e di impulsi (non tramite
I²t)
– p0290 = 3: Riduzione frequenza impulsi (non tramite I²t)
● Con p0290 = 2, in caso di sovraccarico dapprima viene diminuita la frequenza impulsi (e
di conseguenza la frequenza di uscita) finché non si riduce alla frequenza impulsi
nominale, dopodiché se il sovraccarico persiste viene ridotta la corrente di uscita.
Come frequenza impulsi nominale vale la metà del valore reciproco del clock del
regolatore di corrente: 0,5 x 1/p0115[0].
● La riduzione della frequenza impulsi viene effettuata per multipli interi in riferimento alla
frequenza impulsi nominale (5 kHz -> 2,5 kHz -> 1,25 kHz o 4 kHz -> 2 kHz).
● Una volta immesso il numero di giri massimo in p1082, viene automaticamente calcolato
se la frequenza impulsi per il numero di giri massimo immesso è sufficiente ed
eventualmente la frequenza impulsi viene automaticamente aumentata a un valore
richiesto.
In caso di sovraccarico, anche con p0290 = 2 o 3 la nuova frequenza impulsi verrà allora
raggiunta, e la reazione conseguente (riduzione o disattivazione della corrente di uscita)
verrà scatenata.
Eccezioni:
● Con filtro sinusoidale attivo (p0230 = 3, 4) questo comportamento non è consentito, in
quanto la frequenza impulsi impostata di fabbrica (2,5 kHz o 4 kHz) non può in questo
caso essere modificata. Pertanto, la possibilità di scelta per il parametro p0290 risulta qui
limitata a "0" e "1".
Attivazione della frequenza impulsi variabile
Alla messa in servizio il parametro p0290 viene automaticamente impostato sul valore "2". In
tal modo viene attivata la riduzione della frequenza impulsi in caso di sovraccarico.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
379
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Disattivazione della frequenza impulsi variabile
Modificando il parametro p0290 in "0" o "1", la frequenza impulsi variabile viene disattivata.
Schema logico
FP 8014
Segnali e funzioni di sorveglianza - Sorveglianza termica parte di potenza
• r0036
Parte di potenza, sovraccarico I2t
• r0037
CO: Parte di potenza, temperature
• p0115
Tempi di campionamento per circuiti di regolazione interni
• p0230
Azionamento, tipo di filtro lato motore
• p0290
Parte di potenza, reazione al sovraccarico
• p1082
Numero di giri max.
• r2135.13
Guasto sovraccarico termico modulo potenza
• r2135.15
Avviso di sovraccarico termico della parte di potenza
Parametri
9.2.12
Vobulazione di frequenza degli impulsi
Descrizione
Tramite la vobulazione di frequenza è possibile variare leggermente la frequenza degli
impulsi secondo un procedimento statistico. La media della frequenza impulsi corrisponde in
ogni caso al valore impostato; la variazione statistica del valore istantaneo genera uno
spettro di rumore modificato.
Con questo metodo si riduce il rumore soggettivamente percepibile del motore, in particolare
alle frequenze impulsi relativamente basse impostate in fabbrica.
Con p1810.2 = 1 viene attivata la vobulazione di frequenza degli impulsi. L'ampiezza del
segnale statistico di vobulazione è impostabile tramite p1811 nel campo da 0 % a 20 %.
Convertitori da incasso
380
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Limitazioni
● La vobulazione di frequenza degli impulsi si può attivare solo alle seguenti condizioni
(p1810.2 = 1):
– L'azionamento è soggetto al blocco degli impulsi.
– p1800 < 2 x 1000 / p0115[0]
● p1811 (Ampiezza della vobulazione della frequenza impulsi) può essere impostato solo
alle condizioni seguenti:
– p1802.2 = 1
– p0230 (filtro di uscita) < 3 (nessun filtro sinusoidale)
● La massima frequenza impulsi (p1800) si può impostare come segue quando è attivata la
vobulazione e l'abilitazione impulsi:
– Con p1811 = 0: p1800 ≤ 2 x 1000 / p0115[0]
– Con p1811 > 0: p1800 ≤ 1000 / p0115[0]
● Se si imposta la frequenza impulsi (p1800) con vobulazione attivata e abilitazione impulsi
a un valore maggiore di 1000 / p0115[0], allora p1811 viene impostato a 0.
● Se si imposta la frequenza impulsi (p1800) con vobulazione attivata e blocco impulsi a un
valore maggiore di 2 x 1000 / p0115[0], allora p1811 e p1810.2 vengono impostati a 0.
Nota
Disattivazione della vobulazione di frequenza degli impulsi
Disattivando la vobulazione di frequenza degli impulsi (p1810.2 = 0), il parametro p1811
viene impostato in tutti gli indici a 0.
Parametri
• p1800
Valore di riferimento frequenza impulsi
• p1810.2
Vobulazione attivata
• p1811[D] Ampiezza della vobulazione della frequenza impulsi
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
381
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.13
Tempo di esecuzione (contatore ore d'esercizio)
Tempo di esecuzione totale del sistema
Il tempo di esecuzione totale del sistema viene visualizzato in r2114 (Control Unit) ed è
costituito da r2114[0] (millisecondi) e r2114[1] (giorni).
L'indice 0 mostra il tempo di esecuzione del sistema in millisecondi, al raggiungimento di
86.400.000 ms (24 ore) il valore viene azzerato. L'indice 1 mostra il tempo di esecuzione del
sistema in giorni.
Il valore viene memorizzato alla disinserzione.
Dopo l'accensione dell'apparecchio di azionamento il contatore prosegue partendo dal
valore salvato con l'ultimo spegnimento.
Tempo di esecuzione relativo del sistema
Il Tempo di esecuzione relativo del sistema dopo l'ultimo POWER ON viene riportato in
p0969 (Control Unit). Il valore viene espresso in millisecondi, dopo 49 giorni il contatore si
azzera.
Ore di esercizio motore attuali
I contatori delle ore di esercizio del motore p0650 (azionamento) proseguono il conteggio
con l'abilitazione degli impulsi. Quando viene tolta l'abilitazione degli impulsi, il contatore
viene arrestato e il valore memorizzato.
Con p0651 = 0 il contatore viene disattivato.
Quando si raggiunge l'intervallo di manutenzione impostato in p0651, viene emesso l'avviso
A01590. Una volta eseguita la manutenzione del motore, occorre reimpostare l'intervallo di
manutenzione.
Nota
Se, ad esempio, durante la commutazione stella/triangolo viene commutato il set di dati del
motore (MDS) senza cambiare il motore, è necessario sommare i due valori in p0650 per
determinare il valore corretto delle ore di esercizio del motore.
Contatore delle ore di esercizio del ventilatore
L'indicazione delle ore di esercizio del ventilatore nella parte di potenza avviene in p0251
(azionamento).
Il numero di ore di funzionamento contenute in questo parametro può essere solo resettato a
0 (ad es. dopo la sostituzione di un ventilatore).
La durata di esercizio del ventilatore viene impostata in p0252 (azionamento).
500 ore prima del raggiungimento e anche al raggiungimento di questo valore viene emesso
l'avviso A30042 (Durata di funzionamento del ventilatore raggiunta o superata). Esaminando
il valore di anomalia relativo all'avviso si può determinare precisamente la causa dell'avviso.
Con p0252 = 0 la sorveglianza viene disattivata.
Convertitori da incasso
382
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Modalità time stamp
Tramite il parametro p3100 si può impostare la modalità di time stamp.
Impostazione
Commento
p3100 = 0:
Time stamp ore d'esercizio
p3100 = 1:
Time stamp formato UTC
p3100 = 2:
Time stamp ore d'esercizio + 01.01.2000
Impostazione supplementare a partire dal firmware V4.7.
Con questa impostazione viene impiegato come time stamp dei messaggi di
errore il valore che si trova in p3102. Per le versioni firmware inferiori a V4.7 è
stata applicata nell'impostazione p3100 = 0 la base tempo di p2114.
Nota
Impostazioni time stamp in funzione della versione firmware
Se si aggiorna il firmware di un progetto da V4.6 a V4.7, vengono mantenute le impostazioni
di time stamp del vecchio progetto. I tempi indicati dei messaggi di errore non si
differenziano pertanto da quelli della precedente versione del firmware.
Se si crea un nuovo progetto a partire dalla versione firmware V4.7, l'impostazione di
fabbrica darà p3100 = 2 e di conseguenza la base tempo per i messaggi d'errore sarà
diversa. Se invece si desidera conservare quella delle versioni precedenti la V4.7, si dovrà
impostare p3100 = 0.
9.2.14
Modalità simulazione
Descrizione
La modalità simulazione consente sostanzialmente la simulazione dell'azionamento senza
motore collegato e senza tensione del circuito intermedio. A questo proposito occorre
osservare che la modalità simulazione è attivabile solo sotto una tensione effettiva del
circuito intermedio di 40 V. Se la tensione eccede questa soglia, la modalità simulazione si
azzera e viene emessa la segnalazione di guasto F07826.
Con la modalità simulazione è possibile testare la comunicazione con un sistema di
automazione sovraordinato. Se è previsto che l'azionamento restituisca anche i valori attuali,
occorre verificare che durante la modalità di simulazione sia commutato sul funzionamento
senza encoder. Pertanto è possibile testare anticipatamente le parti grandi del software
SINAMICS, come il canale del valore di riferimento, il controllo di sequenziamento, la
comunicazione, la funzione tecnologica, ecc.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
383
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Un'altra applicazione è il test di funzionalità della parte di potenza. Soprattutto nel settore
degli apparecchi che eccedono 75 kW (690 V) e 110 kW (400 V) è necessario testare, dopo
le riparazioni, il controllo dei semiconduttori di potenza. Ciò accade effettuando
l'alimentazione con una modesta tensione continua (ad es. 12 V), come tensione del circuito
intermedio, quindi attivando l'apparecchio e abilitando gli impulsi.
Nota
Funzioni disattivate nella modalità di simulazione
Nella modalità di simulazione le seguenti funzioni sono disattivate:
• Identificazione dati motore
• Identificazione dati motore in movimento senza encoder
• Identificazione della posizione dei poli
Con il controllo U/f e la regolazione vettoriale senza encoder, il riavviamento al volo non
viene eseguito.
Nota
Attivazione dell'uscita binaria r0863.1 in modalità simulazione
Nella modalità di simulazione viene impostata l'uscita binettore r0863.1 = 1. Pertanto prima
di attivare la modalità di simulazione occorre verificare se con questo segnale vengono
inseriti altri apparecchi. Eventualmente potrebbe essere necessario annullare
temporaneamente la corrispondente interconnessione BICO.
Messa in servizio
La modalità simulazione viene attivata tramite p1272 =1; devono essere soddisfatte le
seguenti condizioni:
● La messa in servizio dell'azionamento deve essere conclusa (impostazione predefinita:
motori asincroni standard).
● La tensione del circuito intermedio deve essere inferiore a 40 V (osservare la tolleranza
del rilevamento del circuito intermedio).
Durante la modalità simulazione viene emesso l'avviso A07825 (modalità simulazione
attivata).
Parametri
• p1272
Modalità simulazione
Convertitori da incasso
384
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.15
Inversione di direzione
Descrizione
Con l'inversione di direzione attivata da p1821 è possibile invertire il senso di rotazione del
motore senza modificare il campo rotante invertendo due fasi sul motore e senza invertire
tramite p0410 i segnali dell'encoder.
L'inversione di direzione tramite p1821 è individuabile sulla base del senso di rotazione del
motore. Il valore attuale e il valore di riferimento del numero di giri, il valore attuale e il valore
di riferimento della coppia, nonché la modifica del posizionamento relativo rimangono
invariati.
L'inversione di direzione può avvenire soltanto in stato di blocco impulsi.
L'inversione di direzione può essere impostata diversamente per ogni set di dati
dell'azionamento.
Nota
Commutazione del set di dati dell'azionamento con inversione di direzione impostata
diversamente
In caso di commutazione del set di dati dell'azionamento con inversione di direzione
impostata diversamente e con abilitazione impulsi, viene emessa l'anomalia F7434.
Un'inversione di direzione effettuata può essere osservata controllando i parametri r0069
(correnti di fase) e r0089 (tensione di fase). Nell'inversione di direzione, il riferimento di
posizione va perduto.
Il senso di rotazione di uscita del convertitore può anche essere invertito tramite p1820. In
questo modo è possibile modificare il campo rotante senza dover invertire le connessioni di
potenza. Nel funzionamento con encoder il senso di rotazione va adeguato all'occorrenza
tramite p0410.
ATTENZIONE
Danni materiali causati da accelerazione indesiderata dell'azionamento in caso di valore
attuale del numero di giri esterno
Se per il regolatore del numero di giri si utilizzano valori attuali del numero di giri esterni
tramite p1440, possono verificarsi instabilità nel circuito di regolazione del numero di giri e
l'azionamento viene accelerato fino al limite del numero di giri.
• Se per il regolatore del numero di giri si utilizzano valori attuali del numero di giri esterni,
in caso di modifica del senso di rotazione occorre anche modificare la polarità di tali
valori (p1821 = 1).
Schema logico
FP 4704, 4715
Valutazione encoder
FP 6730, 6731
Interfaccia con il Motor Module
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
385
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Parametri
9.2.16
Descrizione
• r0069
Correnti di fase, valore attuale
• r0089
Valore attuale tensione di fase
• p0410
Encoder, inversione valore attuale
• p1820
Inversione della sequenza delle fasi di uscita
• p1821
Senso di rotazione
Commutazione di unità
Con l'ausilio della commutazione delle unità di misura è possibile convertire parametri e
grandezze di processo in ingresso e in uscita in un sistema di misura unitario adeguato
(unità SI, unità US o nelle relative grandezze di riferimento (%)).
Per la commutazione di unità valgono le seguenti condizioni marginali:
● La commutazione di unità è possibile solo per il Drive Object "VECTOR".
● I parametri indicati sulla targhetta del convertitore o del motore possono essere convertiti
da unità di misura statunitensi a unità di misura SI, ma senza rappresentazione di
riferimento.
● Dopo aver modificato il parametro di commutazione, tutti i parametri assegnati al suo
gruppo di unità vengono commutati in blocco alla nuova unità.
● Il regolatore di tecnologia dispone, per la rappresentazione di grandezze, di un parametro
indipendente per la selezione dell'unità di misura tecnologica (p0595).
● Se la commutazione di unità è impostata sulla grandezza riferita e la grandezza riferita
viene in seguito modificata, il valore percentuale immesso in un parametro non viene
modificato.
Esempio:
– Un numero di giri fisso dell'80 % corrisponde, ad un numero di giri di riferimento di
1500 1/min, ad un valore di 1200 1/min.
– Se il numero di giri di riferimento viene modificato a 3000 1/min, il valore dell'80 %
viene mantenuto e corrisponde a 2400 1/min.
Limitazioni
● In caso di commutazione dell'unità il valore viene arrotondato ai decimali. Questo
significa che il valore originario può essere modificato di una cifra decimale al massimo.
● Se si seleziona una rappresentazione riferita e successivamente si modificano i parametri
di riferimento (ad es. p2000), anche il significato fisico di alcuni parametri di regolazione
viene adeguato, il che provoca una modifica del comportamento di regolazione.
Convertitori da incasso
386
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
● Se si modificano offline in STARTER le grandezze di riferimento (p2000 ... p2007),
possono verificarsi superamenti dei campi di valori dei parametri. Durante il caricamento
nell'apparecchio di azionamento questo causa l'emissione delle relative segnalazioni di
anomalia.
Commutazione delle unità
La commutazione delle unità può essere effettuata tramite AOP30 e tramite STARTER.
● La commutazione delle unità mediante AOP30 viene sempre eseguita immediatamente.
Dopo la modifica dei parametri, i valori corrispondenti vengono visualizzati nella nuova
unità selezionata.
● In caso di comando tramite STARTER, la commutazione delle unità può avvenire soltanto
in modalità offline nella finestra di configurazione dell'oggetto di azionamento
corrispondente. Le nuove unità vengono visualizzate soltanto dopo un download riuscito
("Carica progetto nel sistema di destinazione") e un successivo upload ("Carica progetto
in PG").
Gruppi di unità
Ogni parametro commutabile è assegnato a un gruppo di unità, che a seconda del gruppo
può essere commutato entro limiti definiti.
L'assegnazione relativa ad ogni parametro e i gruppi di unità si possono consultare nella lista
di parametri SINAMICS contenuta nel Manuale delle liste.
I gruppi di unità possono essere commutati singolarmente tramite 4 parametri (p0100,
p0349, p0505 e p0595).
Parametri
• p0010
Messa in servizio, filtro parametri
• p0100
Norma motori IEC/NEMA
• p0349
Sistema di unità, dati del circuito equivalente motore
• p0505
Sistema di unità, selezione
• p0595
Unità tecnologica, selezione
• p0596
Unità tecnologica, grandezza di riferimento
• p2000
Numero di giri di riferimento, frequenza di riferimento
• p2001
Tensione di riferimento
• p2002
Corrente di riferimento
• p2003
Coppia di riferimento
• r2004
Potenza di riferimento
• p2005
Angolo di riferimento
• p2006
Temperatura di riferimento
• p2007
Accelerazione di riferimento
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
387
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.17
Comando freni semplice
Descrizione
Il "comando freni semplice" serve esclusivamente al comando di freni di stazionamento. Il
freno di stazionamento consente di evitare movimenti indesiderati degli azionamenti
disinseriti.
Il comando di apertura e chiusura del freno di stazionamento viene trasmesso mediante
DRIVE-CLiQ dalla Control Unit, che collega e sorveglia i segnali logicamente con sequenze
interne al sistema, direttamente al convertitore.
Il convertitore esegue quindi l'azione e comanda di conseguenza l'uscita per il freno di
stazionamento.
Con il parametro p1215 è possibile configurare il funzionamento del freno di stazionamento.
Figura 9-8
Diagramma di flusso Comando freni semplice
L'inizio del tempo di chiusura per il freno si basa sulla fine del più breve dei due tempi p1227
(Tempo di ritardo cancellazione impulsi) e p1228 (Tempo di sorveglianza riconoscimento di
fermo).
AVVERTENZA
Pericolo di morte a causa di uso improprio del comando freni semplice
Se il comando freno semplice viene usato in modo improprio, possono verificarsi incidenti
che comportano lesioni gravi o la morte.
• Non utilizzare il comando freni semplice per i freni di lavoro.
• Attenersi scrupolosamente alle disposizioni e alle normative tecniche specifiche per
garantire l'incolumità delle persone e l'integrità della macchina.
• Valutare i rischi derivanti ad esempio da assi sospesi.
Convertitori da incasso
388
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Caratteristiche
● Comando automatico tramite controllo sequenziale
● Sorveglianza di fermo
● Apertura forzata del freno (p0855, p1215)
● Chiusura del freno al segnale 1 "Chiudere obbligatoriamente freno di stazionamento"
(p0858)
● Chiusura del freno dopo la disabilitazione del segnale "Abilita regolatore del numero di
giri" (p0856)
Collegamenti dei segnali
L'attivazione del freno di stazionamento avviene tramite le uscite digitali libere della Control
Unit o del TM31 (per l'opzione G60). In caso di necessità l'attivazione deve avvenire tramite
un relè per il collegamento di un freno di stazionamento con tensione più elevata o
fabbisogno di corrente più elevato.
A questo scopo occorre impostare il parametro p1215 a "3" (freno di stazionamento motore
come controllo sequenziale, collegamento tramite BICO) e interconnettere i parametri BICO
corrispondenti delle uscite digitali selezionate.
Messa in servizio
Se alla prima messa in servizio il parametro p1215 è impostato a "0" (nessun freno
presente) e viene rilevato un freno collegato, si attiva automaticamente il comando freni
semplice (p1215 = 1). Viene visualizzata l'anomalia F07935 "Rilevato freno di
stazionamento", che deve essere tacitata.
ATTENZIONE
Danni materiali per danno irreparabile del freno causato da configurazione errata
Se è presente il freno di stazionamento motore, l'impostazione p1215 = "0" (nessun freno di
stazionamento presente) ha come conseguenza che il freno di stazionamento motore resta
chiuso. Ciò provoca il danno irreparabile del freno in caso di movimento del motore.
• Se è presente il freno di stazionamento motore, impostare il parametro p1215 a valori >
1.
Avvertenze per l'impostazione del tempo di apertura (p1216):
● Il tempo di apertura (p1216) dovrebbe essere impostato a un valore maggiore del tempo
di apertura effettivo del freno di stazionamento. In questo modo l'azionamento non
accelera a freno chiuso.
Avvertenze per l'impostazione del tempo di chiusura (p1217):
● Il tempo di chiusura (p1217) dovrebbe essere impostato a un valore maggiore del tempo
di chiusura effettivo del freno di stazionamento. In questo modo gli impulsi vengono
cancellati solo a freno chiuso.
● Se il tempo di chiusura impostato (p1217) è troppo basso rispetto al reale tempo di
chiusura del freno, il carico può cadere.
● Nel caso in cui il tempo di chiusura (p1217) sia impostato troppo alto rispetto al reale
tempo di chiusura del freno, la regolazione lavora in opposizione al freno riducendone di
conseguenza la durata di vita.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
389
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Schema logico
FP 2701
Comando freni semplice (r0108.14 = 0)
• r0056.4
Rimagnetizzazione terminata
• r0060
CO: Valore di riferimento del numero di giri a monte del filtro del valore di
riferimento
• r0063[0...2]
CO: Valore attuale del numero di giri
• r0108.14
Comando freni esteso
• p0855[C]
BI: Aprire obbligatoriamente freno di stazionamento
• p0856
BI: Regolatore del numero di giri abilitato
• p0858
BI: Chiudere obbligatoriamente freno di stazionamento
• r0899.12
BO: Freno di stazionamento aperto
• r0899.13
BO: Comando chiusura freno di stazionamento
• p1215
Configurazione freno di stazionamento del motore
• p1216
Freno di stazionamento motore, tempo di apertura
• p1217
Freno di stazionamento motore, tempo di chiusura
• p1226
Riconoscimento di fermo, soglia di numero di giri
• p1227
Tempo di sorveglianza riconoscimento di fermo
• p1228
Cancellazione impulsi tempo di ritardo
• p1278
Comando freni, analisi diagnostica
Parametri
9.2.18
Sincronizzazione
Descrizione
Con la funzione "Sincronizzazione" e con la presenza di un Voltage Sensing Module VSM10
(per la misurazione della tensione di rete) è possibile sincronizzare un motore sulla rete. Il
collegamento alla rete o il comando contattore allo scopo necessario può avvenire tramite la
funzione di bypass presente o tramite un controllore sovraordinato.
L'impiego della funzione di bypass consente il funzionamento provvisorio (ad es.
l'esecuzione di lavori di manutenzione senza arresto dell'impianto) o permanente del motore
sulla rete.
Con il parametro p3800 si attiva la sincronizzazione. Il rilevamento della tensione avviene
tramite un VSM10 che è associato ad un azionamento (tramite DRIVE-CLiQ) e misura la
tensione di rete.
Convertitori da incasso
390
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Caratteristiche
● Ingressi connettore per il rilevamento della tensione reale del motore mediante VSM10
(r3661, r3662)
● Impostazione della differenza di fase (p3809)
● Attivabile tramite parametro (p3800)
● Abilitazione tramite parametro (p3802)
Schema logico
FP 7020
Funzioni tecnologiche - sincronizzazione
• p3800[0...n]
Attivazione sincronizzazione azionamento di rete
• p3801[0...n]
Numero oggetto di azionamento sincronizzazione azionamento di rete
• p3802[0...n]
BI: Abilitazione sincr. azionamento di rete
• r3803
CO/BO: Parola di comando sincr. azionamento di rete
• r3804
CO: Frequenza di destinazione sincr. azionamento di rete
• r3805
CO: Differenza di frequenza sincr. azionamento di rete
• p3806[0...n]
Valore di soglia differenza di frequenza sincronizzazione rete azionamento
• r3808
CO: Differenza di fase sincr. azionamento di rete
• p3809[0...n]
Valore di riferimento di fase sincronizzazione azionamento di rete
• p3811[0...n]
Limitazione di frequenza sincronizzazione azionamento di rete
• r3812
CO: Frequenza di correzione sincr. azionamento di rete
• p3813[0...n]
Valore di soglia del sincronismo di fase sincronizzazione rete azionamento
• r3814
CO: Differenza di tensione sincr. azionamento di rete
• p3815[0...n]
Valore di soglia differenza di tensione sincronizzazione rete azionamento
• r3819.0...7
CO/BO: Parola di stato sincr. azionamento di rete
Parametri
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
391
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.19
Visualizzazione del risparmio di energia per macchine fluidodinamiche
Funzione della visualizzazione del risparmio di energia
Nelle macchine fluidodinamiche questa funzione calcola l'energia consumata e la confronta
con il fabbisogno energetico approssimato di un impianto con controllo tradizionale tramite
valvole a farfalla.
L'energia risparmiata viene calcolata per il periodo di tempo corrispondente alle ultime 100
ore di esercizio e visualizzata in kWh. Se il tempo di funzionamento è inferiore alle 100 ore, il
risparmio di energia potenziale viene calcolato approssimativamente per 100 ore di
esercizio.
La curva caratteristica del flusso con il controllo tradizionale tramite valvole a farfalla viene
preimpostato tramite 5 punti di interpolazione impostabili.
Contesto
In una macchina fluidodinamica tradizionale, la portata è controllata da valvole a saracinesca
o valvole a farfalla. L'azionamento funziona costantemente al numero di giri nominale. Se la
portata viene ridotta da valvole a saracinesca o valvole a farfalla, il rendimento dell'impianto
cala considerevolmente. La pressione nell'impianto aumenta. Il motore consuma energia
anche quando le valvole a saracinesca o a farfalla sono completamente chiuse, ossia
quando la portata è Q = 0. Inoltre si determinano situazioni indesiderate legate al processo,
come fenomeni di cavitazione nella macchina fluidodinamica o surriscaldamento della stessa
e del mezzo.
Grazie al funzionamento regolato in velocità, un azionamento in carico parziale può
consumare una quantità considerevolmente inferiore di energia rispetto alla regolazione di
processo tradizionale tramite valvole a saracinesca o a farfalla. Ciò vale in particolare per
macchine fluidodinamiche con curve caratteristiche paraboliche. Con SINAMICS si può
regolare la portata o la pressione agendo sui giri della macchina fluidodinamica. In questo
modo si fa funzionare l'impianto quasi al massimo grado di rendimento in tutto il campo
operativo.
Rispetto alle macchine fluidodinamiche, le macchine con caratteristica di carico lineare o
costante, come ad es. i nastri trasportatori o le pompe a pistone, hanno un potenziale di
risparmio di energia minore.
Risparmio di energia con l'uso di un azionamento regolato in velocità
Impiegando un azionamento regolato in velocità, la portata della macchina fluidodinamica
viene regolata tramite il numero di giri. La portata varia in modo linearmente proporzionale
con il numero di giri della macchina fluidodinamica. Eventuali valvole a saracinesca o a
farfalla restano aperte. L'impianto funziona con un rendimento prossimo a quello ottimale e
particolarmente nel campo del carico parziale consuma molta meno energia che se fosse
controllato tramite valvole a saracinesca o a farfalla.
Convertitori da incasso
392
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Figura 9-9
Potenziale di risparmio di energia
Legenda della curva caratteristica superiore:
H[%]= prevalenza, P[%]= pressione di mandata, Q[%]= portata, V[%]= flusso volumetrico
Legenda della curva caratteristica inferiore:
P[%] = potenza della macchina di estrazione, n[%] = numero di giri della macchina di
estrazione
punti di interpolazione p3320 ... p3329 per la curva caratteristica dell'impianto con n = 100%:
P1...P5 = potenza, n1...n5 = numero di giri corrispondente a una macchina regolata in
velocità
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
393
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Adattamento della curva caratteristica del flusso
I 5 punti di interpolazione della curva caratteristica del flusso vengono immessi tramite i
parametri p3320 - p3329. Questa caratteristica può essere progettata singolarmente per
ogni set di dati dell'azionamento.
Tabella 9- 6
Punti di interpolazione della curva caratteristica del flusso
Punto di
interpolazione
Parametri
Impostazione di fabbrica:
1
p3320
P1 = 25,00
p3321
n1 = 0,00
p3322
P2 = 50,00
p3323
n2 = 25,00
p3324
P3 = 77,00
p3325
n3 = 50,00
p3326
P4 = 92,00
P: Potenza in %
n: Numero di giri in %
2
3
4
5
p3327
n4 = 75,00
p3328
P5 = 100,00
p3329
n5 = 100,00
Nota
Conseguenze del mancato adattamento della curva caratteristica del flusso
Se i punti di interpolazione della curva caratteristica del flusso non vengono adattati, per il
calcolo del risparmio di energia viene utilizzata l'impostazione di fabbrica. I valori
dell'impostazione di fabbrica potrebbero discostarsi dalla curva caratteristica dell'impianto e
falsare il calcolo dell'energia effettivamente risparmiata.
Visualizzazione del risparmio energia
L'energia risparmiata viene visualizzata nel parametro r0041.
Impostando p0040 = 1 si riporta a 0 il valore del parametro r0041, dopodiché p0040 torna
automaticamente a 0.
Convertitori da incasso
394
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.20
Protezione in scrittura
Descrizione
La protezione in scrittura serve ad impedire la modifica involontaria dei parametri di
impostazione. Per la protezione in scrittura non è necessario specificare una password.
Attivazione della protezione in scrittura
La protezione in scrittura può essere attivata nei seguenti modi:
● Con STARTER nel funzionamento online dopo aver selezionato il dispositivo di
azionamento tramite Progetto > Protezione in scrittura dispositivo di azionamento >
Attiva.
● Con il pannello operatore AOP30 tramite p7761 = 1.
A questo punto tutti i parametri di impostazione protetti in scrittura non sono più modificabili.
In STARTER tutti i parametri di impostazione protetti in scrittura sono evidenziati su sfondo
grigio nella Lista esperti e nelle maschere operative.
Nell'AOP30 il tentativo di modificare un parametro di impostazione protetto in scrittura viene
rifiutato con un messaggio di errore corrispondente.
I job di scrittura di parametri di impostazione protetti in scrittura tramite la comunicazione
vengono gestiti in modi diversi:
● Le modifiche dei parametri dei controller della classe 1 (controllori, ad es. SIMATIC)
vengono eseguite.
● Le modifiche dei parametri dei controller della classe 2 (tool di engineering o di messa in
servizio, ad es. STARTER) non vengono eseguite.
Disattivazione della protezione in scrittura
La protezione in scrittura può essere disattivata nei seguenti modi:
● Con STARTER nel funzionamento online dopo aver selezionato il dispositivo di
azionamento tramite Progetto > Protezione in scrittura dispositivo di azionamento >
Disattiva.
● Con il pannello operatore AOP30 tramite p7761 = 0.
Stato della protezione in scrittura
Lo stato della protezione in scrittura può essere visualizzato con il parametro r7760.0:
● r7760.0 = 0: La protezione in scrittura non è attiva
● r7760.0 = 1: La protezione in scrittura è attiva
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
395
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Protezione in scrittura: eccezioni
Sono escluse dalla protezione in scrittura le seguenti funzioni e i seguenti parametri di
impostazione:
● Modifica del livello di accesso (p0003)
● Messa in servizio, filtro parametri (p0009)
● Riconoscimento del modulo tramite LED (p0124, p0144, p0154)
● Ripristino parametri (p0972, p0976)
● Salvataggio parametri (p0977)
● Conferma anomalia (p2102, p3981)
● Marca temporale RTC, impostazione ora, sincronizzazione (p3100, p3101, p3103)
● Priorità di comando, modalità per selezione (p3985)
● Trace (p4700 e segg.)
● Generatore di funzioni (p4800 e segg.)
● Attivazione/disattivazione della protezione in scrittura (p7761)
● Lampeggio componente (p9210, p9211)
Nota
Lista delle eccezioni con protezione in scrittura attivata
Nel Manuale delle liste è riportato un elenco dei parametri di impostazione modificabili anche
con la protezione in scrittura attivata.
L'elenco è denominato "WRITE_NO_LOCK".
Protezione in scrittura per sistemi bus di campo Multi-Master
Per i sistemi di bus di campo (ad es. bus CAN) che possono funzionare come sistemi bus
multi-master, è possibile accedere a tutti i parametri di impostazione anche con la protezione
in scrittura attivata.
Per questi sistemi di bus è possibile impostare, tramite il parametro p7762, il comportamento
in caso di protezione in scrittura attivata:
● p7762 = 0: Accesso in scrittura indipendente da p7761
● p7762 = 1: Accesso in scrittura in funzione di p7761
Parametri
• r7760
Stato protezione in scrittura/protezione know-how
• p7761
Protezione in scrittura
• p7762
Protezione in scrittura, sistema bus di campo multi-master, comport.
accesso
Convertitori da incasso
396
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.21
Protezione know-how
9.2.21.1
Descrizione
La protezione Know-how permette, ad es. a un costruttore di macchine, di codificare il knowhow a scopo di protezione contro la copia e la riproduzione.
Per la protezione know-how è necessaria una password; i dati salvati vengono codificati.
Con la protezione know-how attivata, la maggior parte dei parametri di impostazione non
possono essere modificati né letti. La rappresentazione dei parametri di osservazione
rimane immutata. I contenuti della maschere di STARTER non vengono visualizzati.
La protezione know-how può essere associata alla protezione contro la copia.
Caratteristiche con protezione del know-how attivata
● Eccetto alcuni parametri di sistema e i parametri riportati in una lista eccezioni, tutti gli
altri parametri sono bloccati.
● I valori di questi parametri non sono visibili nella Lista esperti e quindi non possono
essere modificati. Al posto dei valori dei parametri si trova il testo "Protezione know-how".
● I parametri con protezione know-how possono essere esclusi nella Lista esperti. Per fare
questo occorre impostare il filtro "Senza protezione know-how" nella colonna "Valore
online".
● I valori dei parametri di supervisione restano visibili.
● Il contenuto delle finestre non viene visualizzato se la protezione know-how è attiva.
● La protezione know-how può essere associata alla protezione contro la copia.
● La protezione know-how vale nella stessa misura anche per gli script.
● Il dispositivo di azionamento, così come gli oggetti di azionamento e gli schemi DCC che
vi si trovano, possono essere visualizzati come incoerenti.
Funzioni che possono essere eseguite con la protezione know-how attivata
Le seguenti funzioni possono essere eseguite anche con la protezione know-how attivata:
● Crea impostazioni di fabbrica
● Salvataggio parametri
● Conferma anomalie
● Visualizzazione di anomalie e avvisi
● Visualizzazione della cronologia di anomalie e avvisi
● Lettura del buffer di diagnostica
● Commutazione al pannello di comando (funzionalità completa del pannello di comando:
assunzione della priorità di comando, tutti i pulsanti e i parametri di impostazione)
● Visualizzazione delle documentazioni di collaudo create
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
397
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Nota
Lista eccezioni con la protezione del know-how attivata
Nel Manuale delle liste è riportato un elenco dei parametri di impostazione modificabili anche
con la protezione del know-how attivata.
L'elenco è denominato "KHP_WRITE_NO_LOCK".
Funzioni che non possono essere eseguite con la protezione know-how attivata
Le seguenti funzioni non possono essere eseguite con la protezione know-how attivata:
● Download
● Impostazione automatica del regolatore
● Misura da fermo/rotante
● Cancella buffer anomalie
● Creazione della documentazione di collaudo
Funzioni eseguibili opzionalmente con la protezione know-how attivata
Le funzioni riportate di seguito possono essere eseguite con la protezione know-how attivata
a condizione che all'attivazione della protezione know-how siano siate abilitate le funzioni di
diagnostica:
● Funzione Trace
● Generatore di funzioni
● Funzioni di misura
Parametri di impostazione che possono soltanto essere letti se la protezione know-how è attivata
I seguenti parametri di impostazione non possono essere modificati con la protezione knowhow attivata, ma possono essere letti:
● Parametri motore (p0100, p0300, p0304, p0305, p0349)
● Set di dati (p0120, p0130, p0140, p0150, p0170, p0180)
● Tipo encoder (p0400)
● Grandezze di riferimento (p2000, p2001, p2002, p2003, p2005, p2006, p2007)
In STARTER questi parametri vengono evidenziati con sfondo grigio nella Lista esperti.
Nota
Elenco dei parametri di impostazione che possono soltanto essere letti se la protezione
know-how è attivata
Nel Manuale delle liste è riportato un elenco dei parametri di impostazione che possono
soltanto essere letti quando la protezione del know-how è attivata.
L'elenco è denominato "KHP_ACTIVE_READ".
Convertitori da incasso
398
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
AOP30 con protezione del know-how attivata
Il pannello operatore AOP30 non visualizza i parametri protetti con protezione know-how
attivata.
Vengono visualizzati i parametri di impostazione che possono soltanto essere letti se la
protezione know-how è attivata. Il tentativo di modificare un parametro di impostazione di
questo tipo viene rifiutato con un messaggio di errore corrispondente.
9.2.21.2
Attivazione della protezione know-how
L'attivazione della protezione know-how può avvenire tramite STARTER nel funzionamento
online.
Attivazione della protezione know-how
La protezione know-how viene attivata tramite STARTER nel funzionamento online nel
seguente modo:
● Selezione del dispositivo di azionamento tramite Progetto > Protezione know-how
dispositivo di azionamento > Attiva.
● Viene visualizzata una finestra di dialogo nella quale si effettuano le seguenti
impostazioni:
– Si può selezionare se la protezione know-how deve avvenire con o senza protezione
contro la copia.
– Facendo clic su Definisci viene visualizzata un'altra finestra di dialogo per l'immissione
e la conferma della password. La password deve essere costituita da un minimo di
uno e un massimo di 30 caratteri; sono ammessi tutti i caratteri.
– Selezionando Copia da RAM a ROM le impostazioni vengono salvate in modo
permanente alla chiusura della maschera.
Se non si seleziona Copia da RAM a ROM le impostazioni per la protezione knowhow vengono salvate solo in modo volatile e dopo la prima inserzione non sono più
disponibili.
● Dopo aver chiuso la finestra di dialogo con OK la protezione know-how viene attivata e i
dati (parametri, DCC) vengono codificati e salvati sulla scheda di memoria.
Per tutti i parametri di impostazione protetti, nella Lista esperti al posto del valore del
parametro compare l'indicazione "Protezione know-how attiva".
Nota
Verifica della password per la protezione know-how e le impostazioni della lingua di
Windows
Una modifica delle impostazioni della lingua di Windows dopo l'attivazione della protezione
know-how può causare errori durante la successiva verifica della password. Pertanto, si
consiglia di utilizzare per la password esclusivamente caratteri ASCII.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
399
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Avvertenza per la protezione know-how
Nota
Cancellazione sicura di dati non codificati già esistenti
Se prima del salvataggio di dati codificati sulla scheda di memoria sono già presenti dati non
codificati, questi dati vengono cancellati in modo non sicuro. Non viene utilizzata alcuna
precauzione per eliminare in modo definitivo i dati non codificati dalla scheda di memoria.
In questo caso, l'utente deve fare in modo che i dati non codificati vengano cancellati in
modo sicuro, ad es. impiegando un tool per PC speciale.
9.2.21.3
Disattivazione della protezione know-how
La disattivazione della protezione know-how può avvenire tramite STARTER nel
funzionamento online.
Disattivazione della protezione know-how
La protezione know-how viene disattivata tramite STARTER nel funzionamento online nel
seguente modo:
● Selezione del dispositivo di azionamento tramite Progetto > Protezione know-how
dispositivo di azionamento > Disattiva.
● Viene visualizzata una finestra di dialogo nella quale è possibile disattivare in modo
temporaneo o definitivo la protezione know-how:
– Disattivazione temporanea:
Selezionare temporanea, immettere la password, confermare con OK.
– Disattivazione definitiva:
Selezionare definitiva, immettere la password, selezionare Copia da RAM a ROM e
confermare con OK.
Avvertenza per la disattivazione della protezione know-how
Nota
Disattivazione temporanea o definitiva della protezione know-how
Disattivare temporaneamente significa che dopo un POWER ON la protezione in scrittura è
nuovamente attiva. I dati salvati sulla scheda di memoria sono sempre codificati. La
riattivazione della protezione del know-how avviene con la password già disponibile.
Disattivare definitivamente significa che anche dopo un POWER ON la protezione in
scrittura non è più attiva. I dati salvati sulla scheda di memoria non sono codificati.
Se la protezione know-how viene disattivata definitivamente, può essere riattivata in caso di
necessità.
Convertitori da incasso
400
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.21.4
Modifica della protezione know-how
La modifica della password per la protezione know-how può avvenire tramite STARTER nel
funzionamento online.
Modifica password
La password per la protezione know-how viene modificata tramite STARTER nel
funzionamento online nel seguente modo:
● Selezione del dispositivo di azionamento tramite Progetto > Protezione know-how
dispositivo di azionamento > Modifica password.
● Viene visualizzata una finestra di dialogo nella quale si effettuano le seguenti
impostazioni:
– Immissione della vecchia password
– Immissione della nuova password
La password deve essere costituita da un minimo di uno e un massimo di 30 caratteri;
sono ammessi tutti i caratteri.
– Conferma della nuova password
● Dopo aver chiuso la finestra di dialogo con OK la password modificata viene attivata.
9.2.21.5
Lista eccezioni OEM
La lista eccezioni OEM contiene i parametri di impostazione esclusi dalla protezione knowhow. I parametri contenuti in questa lista possono essere letti e modificati anche quando la
protezione know-how è attivata.
La lista eccezioni può essere creata tramite la Lista esperti in STARTER nel funzionamento
online.
Tramite il parametro p7763 viene definito il numero di parametri che possono essere inclusi
nella lista eccezioni. Nel parametro p7764 viene immesso in ogni indice il numero del
parametro da includere nella lista eccezioni. La lista eccezioni può essere creata
separatamente per ogni Drive Object.
Nota
Modifica del parametro p7763
Dopo aver modificato il parametro p7763 occorre eseguire il comando "Carica nel PG" per
adattare il campo dell'indice del parametro p7764.
Nell'impostazione di fabbrica, la lista eccezioni della Control Unit contiene un parametro
(p7763 = 1). Nel parametro p7764[0] della Control Unit viene immesso p7766 (Immissione
password); in questo modo, quando la protezione know-how è attivata, è possibile immettere
la password per la disattivazione.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
401
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Nota
Protezione know-how assoluta
Se il parametro p7766 viene rimosso dalla lista eccezioni e viene attivata la protezione
know-how, non è più possibile immettere la password. Di conseguenza non è più possibile
disattivare la protezione know-how!
In questo caso l'accesso all'azionamento può avvenire solo ripristinando le impostazioni di
fabbrica.
9.2.21.6
Protezione contro la copia della scheda di memoria
La protezione contro la copia della scheda di memoria garantisce che i dati codificati salvati
sulla scheda di memoria (parametri e dati DCC) non possano essere copiati e utilizzati su
un'altra scheda di memoria.
La protezione contro la copia della scheda di memoria può essere attivata quando si attiva la
protezione del know-how tramite STARTER.
Con la protezione del know-how e la protezione contro la copia della scheda di memoria
attivate, i dati vengono codificati (parametri e DCC) tenendo conto del numero di serie della
scheda di memoria (r7843) e della Control Unit (r7758).
All'avvio del dispositivo di azionamento, i numeri di serie della scheda di memoria e della
Control Unit salvati vengono confrontati con i numeri di serie reali. Se questi numeri di serie
non coincidono, viene emessa l'anomalia F13100 e l'apparecchio non è più in grado di
funzionare. Analizzando il valore di anomalia è possibile determinare la singola causa del
problema.
9.2.21.7
Sostituzione di parti di ricambio con protezione know-how e protezione contro la copia
associata
Durante il trasferimento dei dati di progettazione con protezione know-how e protezione
contro la copia della scheda di memoria tra il costruttore della macchina (OEM) e il cliente
finale può accadere che si debba sostituire una scheda di memoria danneggiata o una
Control Unit difettosa:
Per questo caso, il trasferimento di dati tra il costruttore della macchina (OEM) e il cliente
finale avviene secondo una procedura definita.
Sostituzione di una scheda di memoria danneggiata o di una Control Unit difettosa presso il
cliente finale
Presupposti:
● L'azionamento è soggetto alla protezione know-how e alla protezione contro la copia
della scheda di memoria
● Il cliente finale dispone di una scheda di memoria o una Control Unit sostitutiva sul posto
● Il progetto STARTER necessario non è salvato presso il cliente finale.
● Il costruttore della macchina dispone di una Control Unit dello stesso tipo di quella del
cliente finale.
Convertitori da incasso
402
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Sequenza:
● Il cliente finale trasmette al costruttore della macchina il numero di serie della scheda di
memoria e della Control Unit.
● Il costruttore della macchina associa il progetto STARTER ai numeri di serie della scheda
di memoria (p7769) e della Control Unit (p7759).
● Il costruttore della macchina carica il progetto STARTER nel dispositivo di azionamento.
● Il costruttore della macchina attiva online dopo il download la protezione contro la copia e
la protezione know-how (p7765, p7767, p7768).
● Il costruttore della macchina salva il progetto tramite p0971 o p0977 sulla scheda di
memoria.
● Il costruttore della macchina recupera i file PS-ACX e gli eventuali file DCC-YDB creati
dall'area "..\USER\SINAMICS\DATA" della scheda di memoria e li invia al cliente finale
(ad es. via e-mail).
● Il cliente finale copia i file nell'area "..\USER\SINAMICS\DATA" della propria scheda di
memoria, li inserisce nella Control Unit e avvia il dispositivo di azionamento.
● Dopo l'avvio, il cliente finale salva il progetto (tramite p0971 o p0977); può essere
necessario immettere nuovamente i parametri dalla lista eccezioni OEM.
9.2.21.8
Panoramica dei parametri importanti
• r7758[0...19]
KHP Control Unit numero di serie
• p7759[0...19]
KHP Control Unit numero di serie
• r7760
Stato protezione in scrittura/protezione know-how
• p7761
Protezione in scrittura
• p7762
Protezione in scrittura, sistema bus di campo multi-master, comport.
accesso
• p7763
KHP Lista eccezioni OEM, indici per p7764
• p7764[0...n]
KHP Lista eccezioni OEM
• p7765
KHP Protezione in scrittura della scheda di memoria
• p7766[0...29]
KHP Immissione password
• p7767[0...29]
KHP Nuova password
• p7768[0...29]
KHP Conferma password
• p7769}0...20]
KHP Scheda di memoria, numero di serie
• r7843[0...20]
Scheda di memoria, numero di serie
KHP: Know-how protection (protezione know-how)
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
403
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.22
Funzionamento di emergenza
Descrizione
Il funzionamento di emergenza, Essential Service Mode (ESM), offre la possibilità in caso di
emergenza di far funzionare l'azionamento anche in presenza di guasti.
Questa funzione può essere utilizzata ad esempio in applicazioni in cui un fermo
indesiderato può provocare conseguenze gravi.
Inoltre gli azionamenti di ventilatori in edifici di grandi dimensioni devono consentire in caso
di incendio l'evacuazione delle persone attraverso le vie di fuga grazie all'aspirazione dei
fumi prodotti.
Caratteristiche
● Nel funzionamento di emergenza viene attivata la funzione di reinserzione automatica
indipendentemente dall'impostazione del parametro p1210. Di conseguenza
l'azionamento viene reinserito quando si verifica un OFF2 a causa di errori interni.
● Nel funzionamento di emergenza viene soppressa la disinserzione del convertitore a
causa di anomalie. Fanno eccezione le anomalie che provocherebbero la distruzione
dell'apparecchio.
● Il funzionamento di emergenza viene attivato con un segnale continuo tramite l'ingresso
digitale definito come sorgente del segnale in p3880.
● Se all'attivazione del funzionamento di emergenza l'azionamento si trova in modalità
bypass, il motore viene commutato automaticamente alla modalità convertitore.
● Al termine del funzionamento di emergenza il convertitore torna al funzionamento
normale e si comporta in base ai comandi e ai valori di riferimento impostati.
Nota
Annullamento della garanzia per convertitore nel funzionamento di emergenza
Nel funzionamento di emergenza la garanzia a tutela del cliente non si applica.
Il funzionamento di emergenza è una condizione eccezionale e non è adatto per un impiego
permanente.
Tenere presente che il funzionamento di emergenza può causare temperature
eccezionalmente elevate, incluso fuoco aperto, all’interno e all’esterno del convertitore,
nonché emissioni di luce, rumore, particelle, gas ecc.
Il convertitore registra il funzionamento di emergenza esteso e le anomalie verificatesi
durante questo funzionamento in una memoria protetta da password. Questi dati sono
accessibili solo all'assistenza tecnica e al servizio riparazioni.
Convertitori da incasso
404
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Attivazione del funzionamento di emergenza
L'attivazione del funzionamento di emergenza avviene con un segnale continuo sull'ingresso
digitale definito come sorgente del segnale in p3880.
Le sorgenti di segnale consentite solo solo gli ingressi digitali della Control Unit:
● r0722.x (high active)
● r0723.x (low active)
x = 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 20, 21
Sorgente del valore di riferimento per il funzionamento di emergenza
All'attivazione del funzionamento di emergenza il sistema commuta al valore di riferimento
impostato tramite p3881:
● p3881 = 0: Ultimo valore di riferimento noto (r1078 livellato) - impostazione di fabbrica
● p3881 = 1: Valore di riferimento fisso del numero di giri 15 (p1015)
● p3881 = 3: Bus di campo
● p3881 = 5: TB30/TM31 Ingresso analogico
● p3881 = 6: Abilitazione della reazione OFF1
● p3881 = 7: Abilitazione della reazione OFF2
In caso di utilizzo del valore di riferimento analogico di TB30 / TM31 (p3881 = 5), viene usato
il valore di riferimento impostato con p3886.
Se con l'impostazione di p3881 = 3 o 5 il valore di riferimento va perduto (ad es. per rottura
di un cavo o guasto del bus di campo), il sistema commuta automaticamente al valore di
riferimento alternativo impostato tramite p3882:
● p3882 = 0: Ultimo valore di riferimento noto (r1078 livellato) - impostazione di fabbrica
● p3882 = 1: Valore di riferimento fisso del numero di giri 15 (p1015)
● p3882 = 2: Numero di giri massimo (p1082)
Senso di rotazione nel funzionamento di emergenza
Per il funzionamento di emergenza può essere necessario, a seconda dell'impianto, invertire
il valore di riferimento direttamente sul posto. A questo scopo il parametro p3883 può essere
interconnesso con un ingresso digitale libero:
● Segnale in p3883 = 0: viene mantenuto il senso di rotazione del valore di riferimento
parametrizzato per il funzionamento di emergenza
● Segnale in p3883 = 1: inversione del senso di rotazione del valore di riferimento
parametrizzato per il funzionamento di emergenza
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
405
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Reinserzione automatica
Nel funzionamento di emergenza viene attivata la funzione di reinserzione automatica, le
impostazioni dei parametri p1206, 1210 e p1212 non hanno alcun effetto. Le impostazioni in
p1211 (Reinserzione automatica, tentativi di avviamento) e p1213 (Reinserzione automatica,
tempo di sorveglianza) continuano ad essere attive. L'impostazione di p1213[0] = p1213[1] =
0,0 s consente un numero illimitato di tentativi di avviamento.
Bypass come strategia di sicurezza
Se il convertitore va in avaria a causa di un errore interno non tacitabile, il funzionamento di
emergenza non è più possibile. In caso di guasto del convertitore, il motore può essere
comandato dal convertitore in modo bypass. A tal fine occorre interconnettere il bit 7 della
parola di stato per la reinserzione automatica (r1214.7) con p1266.
È inoltre necessario che la funzione Bypass sia attivata (p1260 ≠ 0) e che la sorgente di
commutazione per il bypass sia impostata a "Bypass tramite segnale (BI: p1266)" (p1267 =
1).
Comportamento in caso di errore encoder
In caso di funzionamento in regolazione vettoriale con encoder e funzionamento di
emergenza, un errore dell'encoder produce la commutazione automatica al funzionamento
senza encoder e l'azionamento continua a funzionare.
Schema logico
FP 3040
Canale del valore di riferimento - Limitazione di direzione e inversione di
direzione
FP 7033
Funzioni tecnologiche - Funzionamento di emergenza (ESM, Essential
Service Mode)
• p3880
BI: Attivazione ESM sorgente del segnale
• p3881
Sorg.val.rif. ESM
• p3882
ESM Sorgente valore di riferimento alternativa
• p3883
BI: ESM sorgente segnale senso di rotazione
• p3886
CI: ESM Valore di riferimento TB30/TM31 ingresso analogico
• r3887[0...1]
ESM Attivazioni/numero errori
• p3888
ESM Attivazioni/numero errori, ripristino
• r3889.0...10
CO/BO: ESM, parola stato
Parametri
Convertitori da incasso
406
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.23
Server web
9.2.23.1
Descrizione
Informazioni generali
Il server web integrato fornisce, attraverso le sue pagine web, informazioni relative
all'apparecchio di azionamento. L'accesso avviene mediante un browser Internet. Le
informazioni delle pagine Web sono visualizzate in lingua inglese. Per le informazioni relative
ai testi dei messaggi, agli stati degli oggetti di azionamento e alle definizioni dei parametri è
disponibile un'opzione di selezione della lingua, che consente di commutare la
visualizzazione nelle lingue salvate sulla scheda di memoria.
Di seguito sono descritte le funzioni principali del server Web. Le aree di visualizzazione
"Files" e "User´s Area" del server Web, tuttavia, sono descritte dettagliatamente in una
documentazione separata (vedere "Pagine Web definite dall'utente"). Pertanto queste aree
di visualizzazione e le rispettive funzioni non sono trattate nel presente manuale.
Attivazione / configurazione
Il server web è attivato nell'impostazione di fabbrica.
La configurazione del server web avviene tramite il parametro p8986 (Configurazione server
web).
Trasmissione dati
L'accesso avviene tramite la trasmissione non sicura (http) o sicura (https).
Con l'immissione dell'indirizzo corrispondente si definisce il tipo di trasmissione.
Per motivi di sicurezza, il trasferimento sicuro può anche essere forzato disattivando la porta
http.
Accesso
L'accesso al server web avviene tramite le seguenti interfacce:
● Interfaccia LAN della Control Unit CU320-2 DP o CU320-2 PN
● Interfaccia PROFINET della CU320-2 PN
L'indirizzamento dell'azionamento avviene tramite indirizzo IP.
L'indirizzo IP può essere ricavato dai seguenti parametri:
● Interfaccia Ethernet integrata (interfaccia LAN): r8911[0...3]
● Interfaccia PROFINET: r8931[0...3]
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
407
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Diritti di accesso
Sono presenti due utenti provvisti di autorizzazioni diverse:
● Utente "SINAMICS" (attivato nell'impostazione di fabbrica):
– Richiamo di pagine di diagnostica
– Reset memoria anomalie
– Creazione/ampliamento/rimozione di liste di parametri
– Lettura/scrittura/salvataggio dei parametri
● Utente "Administrator", inoltre:
– Aggiornamento progettazione
– Aggiornamento del firmware
– Caricamento di pagine definite dall'utente nell'azionamento
Le impostazioni della protezione in scrittura e del know-how valgono anche in caso di
accesso tramite il server web ai parametri dell'azionamento e alla progettazione.
Browser supportati
È possibile l'accesso al server web tramite i seguenti browser Internet:
● Microsoft Internet Explorer dalla versione 8 e dalla versione 10
● Mozilla Firefox dalla versione 24
● Opera dalla versione 12.16
● Chrome dalla versione 30.0
Pagine Web definite dall'utente
È possibile ampliare le pagine Web predefinite del server Web aggiungendovene di proprie.
Su SIEMENS Industry Online Support si trovano informazioni dettagliate in merito:
1. Aprire nel browser la seguente pagina Internet SIEMENS:
SINAMICS Application Examples
2. Selezionare nella maschera di ricerca il tipo di azionamento "S120" nel campo DriveType
e "Webserver" nel campo Speciality.
3. Fare clic nella lista dei risultati sull'informazione sintetica desiderata.
La breve nota informativa corrispondente apparirà quindi nel SIEMENS Industry Online
Support. Per suo tramite si potrà allora scaricare una descrizione esaustiva in formato
PDF.
Convertitori da incasso
408
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.23.2
Avvio del server web
Presupposti
● Il server web è attivo nell'impostazione di fabbrica.
● Un progetto di azionamento messo in servizio e funzionante.
● Il PG/PC è collegato alla Control Unit (apparecchio di destinazione).
Avvio del server web
1. Immettere l'indirizzo IP dell'azionamento SINAMICS nella riga di indirizzo del browser
Internet (ad es. http://169.254.11.22.
Si apre la pagina iniziale del server web.
Figura 9-10
Pagina iniziale del server web
2. Immettere in alto a sinistra il nome di login (ad es. SINAMICS) ed eventualmente la
password.
Nell'impostazione di fabbrica è abilitato solo l'utente "SINAMICS", non è assegnata
alcuna password.
3. Fare clic su "Login" per confermare l'immissione.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
409
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Figura 9-11
Pagina iniziale dopo il login
Dopo il login è possibile richiamare le varie aree di visualizzazione del server web tramite il
campo di navigazione sul lato sinistro.
Logout
Se non si vuole più utilizzare il server web o se si intendono bloccare le aree di
visualizzazione dettagliate, è possibile scollegarsi.
Per fare questo fare clic su "Logout" in alto a sinistra nel campo di navigazione.
Convertitori da incasso
410
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
9.2.23.3
Configurazione del server web
Configurazione tramite STARTER
La finestra di dialogo di configurazione viene richiamata facendo clic sull'azionamento nella
navigazione di progetto e selezionando il menu contestuale "Server web".
Figura 9-12
Configurazione del server web tramite STARTER
Attivazione server web
Il server web è attivato nell'impostazione di fabbrica.
L'accesso può essere limitato se necessario solo tramite un collegamento sicuro (https).
Nota
Accesso via collegamento sicuro (https)
Per l'accesso al server web tramite collegamento https sono necessari, per SINAMICS e il
browser Internet, i rispettivi certificati di sicurezza. Questi certificati di sicurezza vanno
installati su ogni computer da cui deve essere richiamato il server web.
A questo scopo rivolgersi all'amministratore di sistema.
Abilitazione utente
L'utente "SINAMICS" è abilitato nell'impostazione di fabbrica. Se necessario può essere
impostata una password.
L'utente "Administrator" non è abilitato nell'impostazione di fabbrica. In caso di abilitazione
può anche essere impostata una password.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
411
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Nota
Password sicure
Non sono previste regole per l'assegnazione delle password. È possibile assegnare
qualsiasi tipo di password senza limitazioni. Non sono previste verifiche per caratteri non
consentiti o per password già presenti. In qualità di utenti, si è quindi responsabili in prima
persona della necessaria sicurezza della password.
Utilizzare una password sufficientemente lunga (ad es. 10 caratteri). Utilizzare caratteri
speciali ed evitare password già utilizzate in altre situazioni.
Tenere presente che una modifica delle impostazioni della lingua di Windows può causare
errori durante la successiva verifica della password. Se si utilizzano caratteri speciali
dipendenti dalla lingua, al momento di immettere la password occorre accertarsi che sia
impostata la stessa lingua.
Configurazione tramite AOP30 o Lista esperti
La configurazione avviene tramite il parametro p8986 (Configurazione server web):
Bit 00:
Attivazione server web (impostazione di fabbrica: attivato)
Bit 01:
Accesso via collegamento sicuro (https) (impostazione di fabbrica: non attivato)
Bit 02:
Abilita utente "SINAMICS" (impostazione di fabbrica: abilitato)
Bit 03:
Abilita l'utente "Amministratore" (impostazione di fabbrica: non abilitato)
Nota
Assegnazione della password dopo l'abilitazione dell'utente "Amministratore"
Dopo l'abilitazione dell'utente "Amministratore" tramite il parametro p8986 (tramite AOP30 o
Lista esperti) è necessario assegnare nuovamente la password tramite STARTER. In caso
contrario l'accesso dell'utente "Amministratore" al server web non è consentito.
9.2.23.4
Aree di visualizzazione
Il server web possiede varie aree di visualizzazione, che possono essere attivate tramite le
voci di menu della navigazione.
Home
Questa voce di menu consente di richiamare la pagina iniziale del server web.
Convertitori da incasso
412
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.2 Funzioni dell'azionamento
Device Info
Questa voce di menu consente di visualizzare le informazioni principali dell'apparecchio.
Diagnostics
Questa voce di menu consente di visualizzare lo stato operativo per ogni oggetto di
azionamento nella scheda "Service overview".
Un contrassegno colorato indica inoltre se per l'oggetto di azionamento è presente
un'anomalia o un avviso.
Nella scheda "Tracefiles" sono visualizzati i file Trace che si trovano sulla scheda di
memoria nella directory "USER/SINAMICS/DATA/TRACE".
Messages and Logs
Questa voce di menu consente di visualizzare il buffer di diagnostica nella scheda
"Diagbuffer".
Nella scheda "Alarms drive" sono visualizzati i messaggi di anomalia o di avviso
dell'azionamento. Premendo il pulsante "Reset alarms" è possibile azzerare le anomalie
confermabili.
Parameter
Questa voce di menu consente di creare e gestire liste di parametri definite dall'utente. È
possibile gestire al massimo 20 liste di parametri contenenti fino a 40 parametri ciascuna.
Per ogni lista di parametri i diritti di accesso (lettura, scrittura, modifica) dei due utenti
("SINAMICS" e "Amministratore") possono essere definiti separatamente.
Le impostazioni della protezione in scrittura e del know-how valgono anche in caso di
accesso tramite il server web ai parametri.
Le liste di parametri create vengono salvate nella scheda di memoria dell'azionamento.
Pertanto, una selezione di parametri eseguita una volta resta valida per un successivo
accesso anche dopo la disinserzione dell'azionamento.
Manage config
Questa voce di menu consente all'utente "Amministratore" di caricare e aggiornare i file del
firmware e del progetto.
Files
Questa voce di menu consente all'utente "Amministratore" di caricare nell'azionamento
pagine definite dall'utente.
User's Area
Questa voce di menu consente all'utente "Amministratore" di richiamare pagine definite
dall'utente.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
413
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.3 Funzioni di ampliamento
9.2.23.5
Panoramica dei parametri importanti
• r8911
IE IP Address of Station active
• r8931
PN IP Address of Station active
• p8986
Server web, configurazione
• p8987[0...1]
Server web, assegnazione delle porte
9.3
Funzioni di ampliamento
9.3.1
Regolatore di tecnologia
Descrizione
Il modulo funzionale "Regolatore di tecnologia" consente di realizzare funzioni di regolazione
semplici, come ad es.:
● Regolazione del livello di riempimento
● Regolazione della temperatura
● Regolazione della posizione del ballerino
● Regolazione della pressione
● Regolazione della portata
● Regolazioni semplici senza controllo sovraordinato
● Regolazione della trazione
Il regolatore di tecnologia possiede le seguenti caratteristiche:
● Due valori di riferimento scalabili
● Segnale di uscita scalabile
● Propri valori fissi
● Proprio potenziometro motore
● Le limitazioni di uscita vengono attivate e disattivate tramite generatore di rampa.
● La quota D può essere commutata nel canale dell'errore di regolazione o in quello del
valore reale.
● Il potenziometro motore del regolatore di tecnologia è attivo soltanto se è avvenuta
l'abilitazione degli impulsi dell'azionamento.
Il regolatore di tecnologia è eseguito come un regolatore PID. Il differenziatore può essere
commutato nel canale dell'errore di regolazione o nel canale del valore attuale (impostazione
di fabbrica). Le componenti P, I e D possono essere impostate separatamente.
Convertitori da incasso
414
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.3 Funzioni di ampliamento
Un valore 0 provoca la disinserzione del relativo azionamento. Due ingressi connettore
permettono di impostare i valori di riferimento. I valori di riferimento possono essere scalati
mediante parametri (p2255 e p2256).
Un generatore di rampa nel canale del riferimento consente di impostare il tempo di
accelerazione/decelerazione del valore di riferimento mediante parametri (p2257 e p2258). Il
canale del valore di riferimento e quello del valore reale dispongono ciascuno di uno stadio
livellatore; il tempo di livellamento può essere impostato mediante parametri (p2261 e
p2265).
I valori di riferimento possono essere impostati con valori di riferimento fissi propri (da p2201
a p2215), tramite il potenziometro motore o il bus di campo (ad es. PROFIBUS).
Un precomando può essere alimentato da un ingresso connettore.
È possibile scalare l'uscita mediante un parametro (p2295) e invertire il senso di regolazione.
Il senso di regolazione può essere limitato mediante parametri (p2291 e p2292) e
interconnesso liberamente mediante un'uscita connettore (r2294).
Il valore attuale può essere immesso ad es. mediante un ingresso analogico del TM31.
Se dal punto di vista della tecnica di regolazione si rende necessario utilizzare un regolatore
PID, contrariamente all'impostazione di fabbrica la componente D viene commutata come
differenza tra valore di riferimento e valore attuale (p2263 = 1). Questo è sempre necessario
quando la componente D deve agire anche in caso di variazioni delle grandezze pilota.
L'attivazione della componente D avviene solo se p2274 > 0.
Nota
Congelamento del tempo di accelerazione o decelerazione
Immettendo "0 sec." quale tempo di accelerazione/decelerazione per il generatore di rampa
del regolatore di tecnologia, i valori attuali del generatore di rampa in questione vengono
congelati.
Messa in servizio
Il modulo funzionale "Regolatore di tecnologia" può essere attivato durante l'esecuzione del
wizard della messa in servizio. Il parametro r0108.16 consente di verificarne l'attivazione.
Esempio di regolazione del livello di riempimento
Lo scopo consiste nel mantenere costante il livello in un recipiente.
Per raggiungere questo obiettivo si impiega una pompa regolata in velocità collegata a un
sensore per il rilevamento del livello.
Il livello viene rilevato da un ingresso analogico (ad es. AI0 TM31) e inviato al regolatore di
tecnologia. Il valore di riferimento del livello è memorizzato in un valore di riferimento fisso.
La grandezza di regolazione che ne risulta funge da valore di riferimento per il regolatore di
velocità.
In questo esempio viene utilizzato un Terminal Module TM31.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
415
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.3 Funzioni di ampliamento
Figura 9-13
Regolazione di livello: applicazione
Figura 9-14
Regolazione di livello: struttura di regolazione
Schema logico
FP 7950
Regolatore PID - valori fissi, selezione binaria
FP 7951
Regolatore PID - valori fissi, selezione diretta
FP 7954
Regolatore di tecnologia - potenziometro motore
FP 7958
Regolatore di tecnologia - regolazione
Parametri importanti per la regolazione
• p1155 = r2294
CI: Regolatore di velocità, valore di riferimento del numero di giri 1 [FP
3080]
• p2253 = r2224
valore di riferimento regolatore di tecnologia attivo tramite FSW [FP
7950]
• p2263 = 1
componente D nel segnale di errore [FP 7958]
• p2264 = r4055
segnale del valore attuale Xatt tramite AI0 del TM31 [FP 9566]
• p2280 = Kp
P - calcolo del guadagno mediante ottimizzazione
• p2285 = Tn
calcolo del tempo azione integratrice mediante ottimizzazione
• p2200 = 1
abilitazione del regolatore di tecnologia
Convertitori da incasso
416
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.3 Funzioni di ampliamento
9.3.2
Funzione bypass
La funzione di bypass pilota due contattori tramite le uscite digitali del convertitore e ne
analizza le risposte attraverso gli ingressi digitali (ad es. tramite TM31). Questo circuito
permette di far funzionare il motore tramite il convertitore o direttamente dalla rete. I
contattori vengono comandati tramite il convertitore e i segnali di riposta corrispondenti alle
varie posizioni del contattore devono essere rinviati al convertitore.
Il circuito di bypass può essere realizzato in due varianti:
● senza sincronizzazione del motore con la rete
● con sincronizzazione del motore con la rete.
Per tutte le varianti di bypass vale quanto segue:
● Il bypass viene sempre disinserito quando viene meno il segnale della parola di comando
"OFF2" o "OFF3".
● Eccezione:
l'interruttore di bypass può essere eventualmente bloccato da un controllore
sovraordinato per poter completamente disinserire il convertitore (e quindi anche
l'elettronica di regolazione) mentre il motore funzione con la rete.
L'interblocco dei contattori deve essere eseguito sul lato impianto.
● Al riavvio del convertitore dopo un POWER OFF viene analizzato lo stato del contattore
di bypass. Il convertitore può quindi passare allo stato "Pronto all'inserzione e bypass"
direttamente dopo l'avviamento. Ciò è possibile solo se il bypass viene attivato tramite un
segnale di comando, se il segnale di comando (p1266) è ancora applicato dopo
l'avviamento e se la funzione di riaccensione automatica è attiva (p1200 = 4).
● Il passaggio del convertitore allo stato "Pronto all'inserzione e bypass" dopo l'avviamento
ha una priorità più alta rispetto alla riaccensione automatica.
● La sorveglianza delle temperature del motore tramite sensori è attiva quando il
convertitore si trova in uno dei due stati "Pronto all'inserzione e bypass" o "Pronto al
funzionamento e bypass".
● Entrambi i contattori del motore devono essere progettati per la commutazione sotto
carico.
Nota
Avvertenze relative agli esempi
Gli esempi contenuti nelle descrizioni seguenti rappresentano solo circuiti schematici il cui
scopo è di illustrare il funzionamento di base. I circuiti reali vanno progettati (contattori,
dispositivi di protezione) e dimensionati in funzione dell'impianto specifico.
Presupposti
La funzione di bypass si può realizzare solo con regolazione del numeri di giri senza
encoder (p1300 = 20) o con il controllo U/f (p1300 = 0...19) impiegando un motore
asincrono.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
417
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.3 Funzioni di ampliamento
Messa in servizio della funzione bypass
La funzione bypass fa parte del modulo funzionale "Regolatore di tecnologia", che si può
attivare eseguendo il wizard della messa in servizio. Il parametro r0108.16 consente di
verificarne l'attivazione.
9.3.2.1
Bypass con sincronizzazione e sovrapposizione (p1260 = 1)
Descrizione
Il "Bypass con sincronizzazione con sovrapposizione" viene utilizzato per gli azionamenti
con inerzia ridotta. Si tratta di azionamenti per i quali il numero di giri all'apertura del
contattore K1 diminuirebbe molto rapidamente.
Attivando il parametro "Bypass con sincronizzazione con sovrapposizione (p1260 = 1)", il
motore viene commutato in modo sincronizzato all'alimentazione in rete e viceversa. Durante
la commutazione si ha, per un certo lasso di tempo, la chiusura contemporanea di entrambi i
contattori K1 e K2 (phase lock synchronization).
Per questo tipo di bypass è richiesto un Voltage Sensing Module VSM10 che misura la
tensione di rete per l'azionamento da sincronizzare.
Una bobina permette di scollegare il motore dalla tensione del convertitore e della tensione
di rete. Il valore uk per la bobina è di 10 (± 2) %.
Figura 9-15
Esempio di circuito di bypass con sincronizzazione e sovrapposizione
Attivazione
L'attivazione della funzione di bypass con sincronizzazione (p1260 = 1) può avvenire solo
tramite un segnale di comando. L'attivazione non può avvenire tramite una soglia di velocità
o un'anomalia.
Convertitori da incasso
418
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.3 Funzioni di ampliamento
Parametrizzazione
Dopo aver attivato la funzione di bypass con sincronizzazione e sovrapposizione (p1260 = 1)
occorre impostare ancora i seguenti parametri:
Tabella 9- 7
Impostazione dei parametri per la funzione di bypass con sincronizzazione con
sovrapposizione
Parametri
Descrizione
p1266 =
Impostazione del segnale di comando con p1267.0 = 1
p1267.0 = 1
p1267.1 = 0
La funzione di bypass viene attivata dal segnale di comando
p1269[0] =
Sorgente di segnale per la risposta del contattore K1
p1269[1] =
Sorgente di segnale per la risposta del contattore K2
p3800 = 1
La sincronizzazione è attivata.
p3802 = r1261.2
L'attivazione della sincronizzazione avviene tramite la funzione di bypass.
Processo di trasferimento
Figura 9-16
Diagramma segnale di bypass con sincronizzazione con sovrapposizione
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
419
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.3 Funzioni di ampliamento
Trasferimento del motore alla rete (il comando dei contattori K1 e K2 avviene tramite il convertitore):
● Si ha la seguente situazione di partenza: Il contattore K1 è chiuso, il contattore K2 è
aperto e il motore viene azionato dal convertitore.
● Viene impostato il bit di comando "Comando di bypass" (p1266), (ad es. tramite sistema
di automazione sovraordinato).
● La funzione di bypass imposta il bit della parola di comando "Sincronizzazione" (r1261.2).
● Poiché questo bit viene impostato mentre il convertitore è in funzione, viene avviata
l'operazione di sincronizzazione "Trasferimento del motore alla rete".
● L'algoritmo di sincronizzazione segnala questo stato (r3819.2) al termine della
sincronizzazione della posizione di fase nonché della tensione e frequenza di rete del
motore.
● Il meccanismo di bypass analizza questo segnale e chiude il contattore K2 (r1261.1 = 1).
L'analisi del segnale avviene internamente, il cablaggio BICO non è necessario.
● Dopo che il contattore K2 ha segnalato lo stato "chiuso" (r1269[1] = 1), viene aperto il
contattore K1 e il convertitore provvede al blocco degli impulsi. Il convertitore si trova
nello stato "Pronto al funzionamento e bypass".
● Se viene tolto il comando ON in questa fase, il convertitore passa allo stato "Pronto al
funzionamento e bypass". Se i relativi contattori sono disponibili, il convertitore viene
separato dalla rete e il circuito intermedio scaricato.
Il distacco del motore dal funzionamento di rete avviene secondo la procedura inversa:
All'inizio del processo il contattore K2 è chiuso e il contattore K1 è aperto.
● Viene cancellato il bit di comando "Comando di bypass", (ad es. tramite sistema di
automazione sovraordinato).
● La funzione di bypass imposta il bit della parola di comando "Sincronizza".
● Gli impulsi vengono abilitati. Poiché la funzione "Sincronizzazione" viene impostata prima
della funzione "Abilitazione impulsi", il convertitore interpreta questo comportamento
come un comando di recupero del motore dalla rete e di controllo dello stesso.
● L'algoritmo di sincronizzazione segnala questo stato al termine della sincronizzazione
della posizione di fase nonché della tensione e frequenza di rete del convertitore.
● Il meccanismo di bypass analizza questo segnale e chiude il contattore K1. L'analisi del
segnale avviene internamente, il cablaggio BICO non è necessario.
● Dopo che il contattore K1 ha segnalato lo stato "chiuso", viene aperto il contattore K2. Il
motore viene nuovamente azionato sul convertitore.
9.3.2.2
Bypass con sincronizzazione senza sovrapposizione (p1260 = 2)
Descrizione
Attivando "Bypass con sincronizzazione senza sovrapposizione (p1260 = 2)", il contattore K2
da chiudere viene chiuso solo quando il contattore K1 è aperto (anticipatory type
synchronization). Durante questo tempo il motore non è collegato a una rete, per cui il
numero di giri viene determinato dal carico e dall'attrito. Perciò questo tipo di bypass è
Convertitori da incasso
420
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.3 Funzioni di ampliamento
adatto per gli azionamenti con inerzia elevata (vedere la nota seguente). Prima della
sincronizzazione, la posizione di fase della tensione motore deve essere impostata in modo
che, rispetto alla rete, esista un "vantaggio" sul quale eseguire la sincronizzazione. Ciò si
ottiene impostando il valore di riferimento di sincronizzazione (p3809). La frenatura del
motore nel breve lasso di tempo in cui entrambi i contattori sono aperti, determina, alla
chiusura del contattore K2, una differenza di frequenza e di fase circa pari a zero.
Per questo tipo di bypass è richiesto un Voltage Sensing Module VSM10 che misura la
tensione di rete per l'azionamento da sincronizzare.
Per un perfetto funzionamento è indispensabile che il momento di inerzia dell'azionamento e
del carico sia sufficiente.
Nota
Momento di inerzia sufficiente
Un momento di inerzia sufficiente si contraddistingue per il fatto che durante la separazione
dei contattori K1 e K2 il numero di giri del motore non presenta una variazione superiore
all'incirca a quella dello scorrimento nominale. La differenza angolare elettrica del motore
rispetto alla differenza di fase della rete può variare solo nella misura in cui può ancora
essere compensata tramite p3809.
Le procedure descritte in precedenza per la rilevazione del valore di riferimento di
sincronizzazione (p3809) rendono superfluo l'impiego della bobina di disaccoppiamento.
Figura 9-17
Esempio di circuito di bypass con sincronizzazione senza sovrapposizione
Attivazione
L'attivazione della funzione di bypass senza sincronizzazione (p1260 = 2) può avvenire solo
tramite un segnale di comando. L'attivazione non può avvenire tramite una soglia di numero
di giri o un'anomalia.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
421
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.3 Funzioni di ampliamento
Parametrizzazione
Dopo aver attivato la funzione di bypass con sincronizzazione senza sovrapposizione
(p1260 = 2) occorre impostare ancora i seguenti parametri:
Tabella 9- 8
Impostazione dei parametri per la funzione di bypass con sincronizzazione senza
sovrapposizione
Parametri
9.3.2.3
Descrizione
p1266 =
Impostazione del segnale di comando con p1267.0 = 1
p1267.0 = 1
p1267.1 = 0
La funzione di bypass viene attivata dal segnale di comando
p1269[0] =
Sorgente di segnale per la risposta del contattore K1
p1269[1] =
Sorgente di segnale per la risposta del contattore K2
p3800 = 1
La sincronizzazione è attivata.
p3802 = r1261.2
L'attivazione della sincronizzazione avviene tramite la funzione di bypass.
p3809 =
Impostazione del valore di riferimento di fase per la sincronizzazione reteazionamento
Bypass senza sincronizzazione (p1260 = 3)
Descrizione
Al momento del passaggio del motore al funzionamento in rete, si ha l'apertura del
contattore K1 (dopo il blocco impulsi del convertitore), un tempo di attesa necessario alla
diseccitazione del motore, quindi la chiusura del contattore K2. Ciò consente l'azionamento
diretto del motore in rete.
In seguito alla commutazione non sincronizzata del motore, quando si chiude il circuito
passa una corrente di compensazione di cui si deve tenere conto in fase di progettazione del
dispositivo di protezione (vedere la figura "Circuito di bypass senza sincronizzazione").
Perciò questo tipo di bypass è adatto solo per gli azionamenti di potenza ridotta.
Con il recupero del motore tramite il convertitore dopo il funzionamento in rete si ha
innanzitutto l'apertura del contattore K2 e, decorso il tempo di diseccitazione, la chiusura del
connettore K1. Dopodiché il convertitore esegue il riavviamento al volo del motore in
rotazione. Il motore viene ora azionato sul convertitore.
Per questo tipo di bypass non è richiesto un Voltage Sensing Module VSM10.
Il contattore K2 deve essere dimensionato per la commutazione sotto carico induttivo.
I contattori K1 e K2 devono essere bloccati contro la chiusura simultanea.
La funzione "Riavviamento al volo" deve essere attivata (p1200 = 1).
Convertitori da incasso
422
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.3 Funzioni di ampliamento
Figura 9-18
Esempio di circuito di bypass senza sincronizzazione
Attivazione
L'attivazione del bypass senza sincronizzazione (p1260 = 3) può avvenire mediante i
seguenti segnali (p1267):
● Bypass tramite segnale di comando (p1267.0 = 1):
l'attivazione del bypass viene provocata da un segnale digitale (p1266), ad es. da un
sistema di automazione sovraordinato. Se il segnale digitale viene nuovamente tolto, una
volta trascorso il tempo di ritardo per il debypass (p1263) si verifica una commutazione al
funzionamento con convertitore.
● Bypass alla soglia di numero di giri (p1267.1 = 1):
quando viene raggiunto un determinato numero di giri, si attiva il bypass e il convertitore
funge da convertitore di avvio. Un presupposto per l'attivazione del bypass consiste nel
fatto che il valore di riferimento del numero di giri superi la soglia del numero di giri di
bypass (p1265).
Il ritorno al funzionamento con convertitore viene avviato dalla diminuzione del valore di
riferimento (sull'ingresso del generatore di rampa, r1119) sotto la soglia del numero di giri
di bypass (p1265). Attraverso la condizione valore di riferimento > valore di confronto si
impedisce che il bypass venga subito riattivato se dopo la commutazione al
funzionamento con convertitore il numero di giri reale è ancora superiore alla soglia di
bypass (p1265).
L'impostazione delle grandezze tempo di bypass, tempo di debypass, numero di giri di
bypass e la sorgente di comando per la commutazione, avviene tramite parametri.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
423
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.3 Funzioni di ampliamento
Parametrizzazione
Dopo aver attivato la funzione di bypass senza sincronizzazione (p1260 = 3) occorre
impostare ancora i seguenti parametri:
Tabella 9- 9
Impostazione dei parametri per la funzione di bypass con sincronizzazione senza
sovrapposizione
Parametri
9.3.2.4
Descrizione
p1262 =
Impostazione del tempo morto di bypass
p1263 =
Impostazione del tempo morto di debypass
p1264 =
Impostazione del tempo di ritardo di bypass
p1265 =
Impostazione della soglia del numero di giri con p1267.1 = 1
p1266 =
Impostazione del segnale di comando con p1267.0 = 1
p1267.0 =
p1267.1 =
Impostazione del segnale che attiva la funzione di bypass
p1269[1] =
Sorgente di segnale per la risposta del contattore K2
p3800 = 0
La sincronizzazione è disattivata.
p1200 = 1
Funzione "Riavviamento al volo" sempre attiva.
Schema logico
FP 7020
Sincronizzazione
Convertitori da incasso
424
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.3 Funzioni di ampliamento
9.3.2.5
Parametro
Funzione bypass
• p1200
Riavviamento al volo, modo operativo
• p1260
Configurazione bypass
• r1261
CO/BO: parola di comando/stato bypass
• p1262
Tempo morto bypass
• p1263
Tempo di ritardo debypass
• p1264
Tempo di ritardo bypass
• p1265
Soglia di numero di giri bypass
• p1266
BI: Comando di controllo di bypass
• p1267
Configurazione sorgente di commutazione bypass
• p1268
BI: Sincronizzazione conferma di bypass conclusa
• p1269
BI: Interruttore di bypass, risposta
• p1274
BI: Tempo di sorveglianza interruttore di bypass
Sincronizzazione
• p3800
Attivazione sincronizzazione rete azionamento
• p3801
Numero oggetto di azionamento sincronizzazione rete azionamento
• p3802
BI: abilitazione della sincronizzazione rete azionamento
• r3803
CO/BO: parola di comando sincronizzazione rete azionamento
• r3804
CO: frequenza di destinazione sincronizzazione rete azionamento
• r3805
CO: differenza di frequenza sincronizzazione rete azionamento
• p3806
Valore di soglia differenza di frequenza sincronizzazione rete azionamento
• r3808
CO: differenza di fase sincronizzazione rete azionamento
• p3809
Valore di riferimento fase sincronizzazione rete azionamento
• p3811
Limite di frequenza sincronizzazione rete azionamento
• r3812
CO: frequenza di correzione sincronizzazione rete azionamento
• p3813
Valore di soglia del sincronismo di fase sincronizzazione rete azionamento
• r3814
CO: differenza di tensione sincronizzazione rete azionamento
• p3815
Valore di soglia differenza di tensione sincronizzazione rete azionamento
• r3819
CO/BO: parola di stato sincronizzazione rete azionamento
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
425
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.3 Funzioni di ampliamento
9.3.3
Comando freni esteso
Descrizione
Il modulo funzionale "Comando freni esteso" consente di realizzare comandi di frenatura
complessi, ad es. per freni di stazionamento motore e freni di esercizio.
Il freno viene comandato nel seguente modo (la sequenza indica la priorità):
● Tramite il parametro p1215
● Tramite i parametri binettore p1219[0..3] e p0855
● Tramite il riconoscimento di fermo
● Tramite il valore di soglia dell'interconnessione connettore
Messa in servizio
Il modulo funzionale "Comando freni esteso" può essere attivato durante l'esecuzione del
wizard della messa in servizio. Il parametro r0108.14 consente di verificarne l'attivazione.
Il parametro p1215 deve essere impostato a "3" e il freno deve essere comandato tramite
un'uscita digitale (ad es. sulla morsettiera utente TM31).
Comando freni esteso nella frenatura con segnalazione di risposta
Nei freni con segnalazione di risposta (p1275.5 = 1) il comando freni reagisce ai contatti di
segnalazione del freno. Se il temporizzatore p1216 è superiore al tempo che trascorre fino al
segnale di risposta, l'accostamento viene ritardato di un tempo equivalente.
Per un accostamento senza ritardi, il tempo di apertura impostato in p1216 deve essere
minore del tempo fino al segnale di risposta. Se il temporizzatore in p1216 è impostato a un
valore inferiore, compare l'avviso A07931 "Il freno non si apre".
Rimedio:
1. Attivare "Abilitazione con risposta" (p1275.6 = 1).
L'abilitazione impulsi (BO: r1229.3) e l'abilitazione del valore di riferimento (BO: r0899.15)
sono indipendenti dal livello di tempo impostato (p1217, p1216). Entrambe le abilitazioni
vengono determinate esclusivamente dalla risposta (BI: p1222, BI: p1223). I
temporizzatori (p1216, p1217) hanno ancora effetto solo sull'avviso A07931 "Il freno non
si apre" e A07932 "Il freno non si chiude".
2. Opzionale: Per fare in modo che i due avvisi non compaiano più, impostare i due
temporizzatori (p1217, p1216) a 0 ms.
Conseguenza: la sorveglianza del freno e la visualizzazione degli avvisi vengono
disattivate.
Convertitori da incasso
426
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.3 Funzioni di ampliamento
Esempio 1: Avviamento contro freno chiuso
Al momento dell'inserzione il riferimento viene abilitato immediatamente (se sono date altre
abilitazioni particolari) anche se il freno non è ancora aperto (p1152 = 1). L'impostazione di
fabbrica p1152 = r0899.15 deve essere separata. In un primo tempo l'azionamento forma
una coppia contro il freno chiuso. Il freno viene aperto soltanto quando la coppia o la
corrente del motore (p1220) superano la soglia di frenatura 1 (p1221).
A seconda del tipo e dell'esecuzione del freno, la procedura può avere tempi diversi finché il
freno non si è aperto completamente. Occorre tenere presente che quando viene superata la
coppia della soglia di frenatura, il segnale di abilitazione del funzionamento (p0899.2) viene
interrotto per il periodo di apertura del freno (p1216), in modo che la corrente del motore non
superi, in questo intervallo, i valori limite ammessi o che la coppia motore generata non
danneggi il freno. L'intervallo di tempo p1216 va impostato in funzione del tempo
effettivamente necessario per l'apertura del freno.
Questa configurazione viene utilizzata ad es. quando l'azionamento viene accoppiato a un
nastro sotto trazione (formatura di anse nella laminazione dell'acciaio).
Esempio 2: Freno di emergenza
In caso di emergenza, la frenatura deve avvenire contemporaneamente sia a livello elettrico
che a livello meccanico. Per ottenere questo si utilizza OFF3 come segnale di trigger della
frenatura di emergenza:
p1219[0] = r0898.2 e p1275.00 = 1 (OFF3 su "Chiudere subito il freno" e invertire il segnale).
Affinché il convertitore non lavori in opposizione al freno, occorre impostare la rampa OFF3
(p1135) a 0 secondi. Può venire prodotta un'energia generatorica, che deve essere
trasformata in calore mediante una resistenza di frenatura.
Questa è un'applicazione tipica, ad es. per calandre, utensili di taglio, carrelli e presse.
Esempio 3: Freno di esercizio per gli azionamenti di gru
Per i dispositivi di sollevamento con comando manuale è importante che l'azionamento
reagisca immediatamente al movimento della leva di comando (combinatore pilota). A
questo scopo, l'azionamento viene inserito tramite un comando ON (p0840) (gli impulsi sono
abilitati). Il valore di riferimento del numero di giri (p1142) e il regolatore di velocità (p0856)
sono inibiti. Il motore è magnetizzato. Non si ha pertanto il tempo di magnetizzazione (da 1 a
2 sec.), tipico dei motori trifase.
Come ritardo tra la deviazione del combinatore pilota e il movimento del motore resta ora
soltanto il tempo di rilascio del freno. Se il combinatore pilota viene azionato, si verifica una
"abilitazione del valore di riferimento del controllo" (bit interconnesso con p1142, p1229.2,
p1224.0). Il regolatore di velocità viene immediatamente abilitato; dopo il tempo di rilascio
del freno (p1216) avviene l'abilitazione del riferimento del numero di giri. Quando il
combinatore pilota è nella posizione zero, il valore di riferimento del numero di giri viene
inibito e l'azionamento arrestato con rampa di decelerazione del generatore di rampa. Se il
limite di fermo (p1226) viene superato in negativo, il freno si chiude. Dopo il tempo di
chiusura del freno (p1217) il regolatore di velocità viene inibito (il motore cessa di generare
forza!). Viene utilizzato il controllo freni esteso con le modifiche sotto descritte.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
427
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.3 Funzioni di ampliamento
Figura 9-19
Esempio di freno di esercizio per azionamento di gru
Messaggi di comando e di stato del comando freni esteso
Tabella 9- 10 Controllo del comando freni esteso
Nome del segnale
Ingresso binettore
Parola di comando, controllo
sequenziale / parametri di
interconnessione
Abilitare valore di riferimento del
numero di giri
p1142 BI: Abilitazione valore di
riferimento del numero di giri
STWA.6
Abilitazione valore di riferimento 2
p1152 BI: Abilitazione valore di
riferimento 2
p1152 = r899.15
Aprire obbligatoriamente freno di
stazionamento
p0855 BI: Aprire obbligatoriamente
freno di stazionamento
STWA.7
Abilita regolatore del numero di giri
p0856 BI: Abilita regolatore del numero
di giri
STWA.12
Chiudere obbligatoriamente freno di
stazionamento
p0858 BI: Chiudere obbligatoriamente
freno di stazionamento
STWA.14
Convertitori da incasso
428
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.3 Funzioni di ampliamento
Tabella 9- 11 Messaggio di stato comando freni esteso
Nome del segnale
Parametri
Parola di stato freno
Comando apertura freno (segnale
continuo)
r1229.1
B_ZSW.1
Abilitazione impulsi comando di
frenatura esteso
r1229.3
B_ZSW.3
Il freno non si apre
r1229.4
B_ZSW.4
Il freno non si chiude
r1229.5
B_ZSW.5
Soglia di frenatura superata
r1229.6
B_ZSW.6
Valore di soglia di frenatura superato in r1229.7
negativo
B_ZSW.7
Tempo di sorveglianza freno scaduto
r1229.8
B_ZSW.8
Richiesta abilitazione impulsi non
disponibile/n_reg disabilitato
r1229.9
B_ZSW.9
Risultato combinazione logica OR del
freno
r1229.10
B_ZSW.10
Risultato combinazione logica AND del
freno
r1229.11
B_ZSW.11
Schema logico
FP 2704
Comando freni/riconoscimento di fermo esteso (r0108.14 = 1)
FP 2707
Comando freni esteso - Apertura/chiusura del freno (r0108.14 = 1)
FP 2711
Comando freni esteso - Uscite di segnale (r0108.14 = 1)
• r0108.14
Comando freni esteso
• r0899
CO/BO: Parola di stato, controllo sequenziale
Parametri
Sorveglianza di fermo
• r0060
CO: Valore di riferimento del numero di giri a monte del filtro del valore di
riferimento
• r0063[0...2]
CO: Valore attuale del numero di giri
• p1224[0...3]
BI: Chiudere freno di stazionamento motore in stato di fermo
• p1225
CI: Riconoscimento di inattività, valore di soglia
• p1226
Sorveglianza di fermo, soglia di velocità
• p1227
Tempo di sorveglianza riconoscimento di fermo
• p1228
Riconoscimento di fermo, tempo di ritardo
• p1276
Freno di stazionamento motore, esclusione riconoscimento inattività
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
429
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.3 Funzioni di ampliamento
Apertura e chiusura freno
• p0855
BI: Aprire obbligatoriamente freno di stazionamento
• p0858
BI: Chiudere obbligatoriamente freno di stazionamento
• p1216
Freno di stazionamento motore, tempo di apertura
• p1217
Freno di stazionamento motore, tempo di chiusura
• p1218[0...1]
BI: Aprire freno di stazionamento motore
• p1219[0...3 ]
BI: Chiudere immediatamente freno di stazionamento motore
• p1220
CI: Aprire freno di stazionamento motore, soglia sorgente del segnale
• p1221
Aprire freno di stazionamento, soglia
• p1277
Freno di stazionamento motore, superato ritardo soglia fren.
• p1279
BI: Freno di stazionamento motore, combinazione logica OR/AND
Sorveglianze freno
• p1222
BI: Freno di stazionamento motore, risposta, freno chiuso
• p1223
BI: Freno di stazionamento motore, risposta, freno aperto
Configurazione, parola di comando/stato
9.3.4
• p1215
Configurazione freno di stazionamento del motore
• r1229
CO/BO: Freno di stazionamento motore, parola di stato
• p1275
Freno di stazionamento, parola di comando
• p1278
Freno di stazionamento, tipo
Funzioni di sorveglianza estese
Descrizione
Il modulo funzionale "Funzioni di sorveglianza estese" permette di realizzare le seguenti
funzioni di sorveglianza:
● Sorveglianza valore di riferimento del numero di giri: |n_rif| ≤ p2161
● Sorveglianza valore di riferimento del numero di giri: n_rif > 0
● Modulo di controllo carico
Descrizione della sorveglianza del carico
Questa funzione consente di sorvegliare la trasmissione della forza tra motore e macchina di
lavoro. Applicazioni tipiche sono ad es. cinghie trapezoidali, cinghie piane o catene che
avvolgono pulegge o rocchetti di catene di alberi motore e alberi di uscita trasmettendo
velocità e forze periferiche. Il controllo del carico può determinare sia il blocco della
macchina di lavoro che l'interruzione della trasmissione della forza.
Nella sorveglianza del carico la curva attuale del numero di giri/della coppia viene
confrontata con la curva programmata del numero di giri/della coppia (p2182 ... p2190). Se il
Convertitori da incasso
430
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.3 Funzioni di ampliamento
valore attuale si trova al di fuori della fascia di tolleranza programmata, a seconda del
parametro p2181 viene segnalata un'anomalia o un allarme. Un ritardo della segnalazione di
anomalia o di allarme può essere impostato con il parametro p2192. Si evitano in questo
modo allarmi errati provocati da stati di passaggio transitori.
Figura 9-20
Sorveglianza del carico (p2181 =1)
Messa in servizio
Il modulo funzionale "Funzioni di sorveglianza estese" può essere attivato durante
l'esecuzione del wizard della messa in servizio. Il parametro r0108.17 consente di verificarne
l'attivazione.
Schema logico
FP 8010
Segnalazioni del numero di giri 1
FP 8011
Segnalazioni del numero di giri 2
FP 8013
Modulo di controllo carico
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
431
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
Parametri
• p2150
Numero di giri isteresi 3
• p2151
CI: Valore di riferimento del numero di giri per i messaggi
• p2161
Valore di soglia numero di giri 3
• p2181
Sorveglianza del carico, reazione
• p2182
Sorveglianza carico, soglia di numero di giri 1
• p2183
Sorveglianza carico, soglia di numero di giri 2
• p2184
Sorveglianza carico, soglia di numero di giri 3
• p2185
Sorveglianza coppia del carico, soglia del numero di giri 1 superiore
• ...
• p2190
Sorveglianza coppia del carico, soglia del numero di giri 3 inferiore
• p2192
Sorveglianza del carico, tempo di ritardo
• r2198.4
|n_rif| ≤ p2161
• r2198.5
n_rif > 0
• r2198.11
La sorveglianza del carico segnala un avviso
• r2198.12
La sorveglianza del carico segnala un'anomalia
Convertitori da incasso
432
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
9.4
Funzioni di sorveglianza e di protezione
9.4.1
Protezione generale delle parti di potenza
Descrizione
Le parti di potenza SINAMICS dispongono di una protezione completa dei componenti di
potenza.
Tabella 9- 12 Protezione generale delle parti di potenza
Protezione contro
Misura di protezione
Sovracorrente1)
Sorveglianza con due soglie:
Reazione
•
Superamento della prima soglia
A30031, A30032, A30033
Intervento della limitazione di corrente di una fase.
L'invio degli impulsi nella fase interessata viene
bloccato per un periodo di impulsi.
In caso di superamento frequente della soglia si ha
F30017 -> OFF2
•
Superamento della seconda soglia
F30001 "Sovracorrente" -> OFF2
Sovratensione del circuito Confronto tra la tensione del circuito
intermedio1)
intermedio e la soglia di disinserzione
dell'hardware
F30002 "Sovratensione" -> OFF2
Sottotensione del circuito
intermedio1)
Confronto tra la tensione del circuito
intermedio e la soglia di disinserzione
dell'hardware
F30003 "Sottotensione" -> OFF2
Cortocircuito1)
Seconda soglia della sorveglianza di
sovracorrente
F30001 "Sovracorrente" -> OFF2
Sorveglianza Uce del modulo IGBT
F30022 "Sorveglianza Uce" -> OFF2
Cortocircuito verso terra
Sorveglianza della somma di tutte le
correnti di fase
Dopo il superamento della soglia in p0287:
F30021 "Parte di potenza: Cortocircuito verso terra"
-> OFF2
Nota:
la somma di tutte le correnti di fase viene indicata in
r0069[6]. Per l'esercizio il valore in p0287[1] deve
essere impostato a un valore maggiore della somma
delle correnti di fase con isolamento intatto.
Rilevamento di mancanza
di fase sulla rete 1)
1)
F30011 "Mancanza di fase sulla rete nel circuito
principale" -> OFF2
Le soglie di sorveglianza sono predefinite nel convertitore e non possono essere modificate dall'utente.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
433
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
9.4.2
Sorveglianze termiche e reazioni ai sovraccarichi
Descrizione
La sorveglianza termica della parte di potenza ha il compito di rilevare gli stati critici. Dopo il
superamento delle soglie di avviso sono disponibili reazioni sotto forma di opzioni
parametrizzabili che consentono di proseguire il funzionamento (ad es. a potenza ridotta)
impedendo una disinserzione immediata. Le opzioni di parametrizzazione sono tuttavia
semplici interventi al di sotto delle soglie di disinserzione non modificabili dall'utente.
Sono disponibili le seguenti sorveglianze termiche:
● Sorveglianza i²t – A07805 – F30005
La sorveglianza i²t protegge i componenti che presentano grandi costanti di tempo
termiche rispetto ai semiconduttori. Un sovraccarico relativo a i²t si verifica quando la
capacità di utilizzazione del convertitore r0036 rileva un valore superiore al 100 %
(capacità di utilizzazione percentuale riferita al funzionamento nominale).
● Temperatura dei dissipatori di calori – A05000 – F30004
Consente di sorvegliare la temperatura r0037[0] dei dissipatori di calore sui
semiconduttori di potenza (IGBT).
● Temperatura del chip - A05001 - F30025
Tra la giunzione dell'IGBT e il dissipatore di calore possono verificarsi notevoli differenze
di temperatura. In r0037[13...18] viene visualizzata la temperatura calcolata dello strato
isolante; la sorveglianza evita che venga superato il valore massimo indicato della
temperatura dello strato isolante.
In caso di sovraccarico relativo a una di queste sorveglianze, viene visualizzato un avviso.
La soglia di avviso p0294 (sorveglianza i²t) è parametrizzabile in funzione dei valori di
disinserzione.
Esempio
La differenza di temperatura tra due sensori non può essere maggiore di 15 gradi Kelvin (K);
per la sorveglianza della temperatura del dissipatore di calore e dell'aria in entrata viene
impostata una differenza di temperatura di 5 K. Pertanto sotto la soglia di disinserzione di 15
K o 5 K viene emesso un avviso concernente una sovratemperatura pericolosa. Il p0294
consente di modificare solo la soglia di avviso e di mantenere quindi un avviso preventivo,
eventualmente intervenendo nel processo di azionamento (ad es. riduzione del carico,
diminuzione della temperatura ambiente).
Convertitori da incasso
434
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
Reazioni al sovraccarico
La parte di potenza reagisce con l'avviso A07805. La Control Unit attiva
contemporaneamente all'avviso le reazioni parametrizzate tramite p0290. Le reazioni
possibili sono:
● Riduzione della frequenza degli impulsi (p0290 = 2, 3)
Questo è un metodo molto efficace per ridurre le perdite nella parte di potenza, poiché le
perdite di commutazione rappresentano una parte molto consistente delle perdite totali.
In molte applicazioni può essere tollerata una riduzione temporanea della frequenza degli
impulsi a favore di una conservazione del processo.
Svantaggio:
la riduzione della frequenza degli impulsi favorisce una maggiore ondulazione di corrente,
che può avere come conseguenze l'incremento dell'ondulazione della coppia sull'albero
motore (con basso momento di inerzia) e l'aumento del livello di rumorosità. La riduzione
della frequenza degli impulsi non ha effetti sulla dinamica del circuito di regolazione della
corrente poiché il tempo di campionamento della regolazione di corrente rimane costante.
● Riduzione della frequenza di uscita (p0290 = 0, 2)
Questa variante è utile se non si desidera una riduzione della frequenza degli impulsi o
se la frequenza degli impulsi è già impostata al livello minimo. Inoltre, il carico dovrebbe
avere una caratteristica del tipo ventilatore, cioè una caratteristica di coppia quadratica al
decrescere del numero di giri. La diminuzione della frequenza di uscita provoca una
sensibile riduzione della corrente di uscita del convertitore e minori perdite nella parte di
potenza.
● Nessuna riduzione (p0290 = 1)
Questa opzione deve essere selezionata se non si verifica una riduzione della frequenza
degli impulsi o della corrente di uscita. Il convertitore non cambia punto di lavoro dopo il
superamento della soglia di avviso affinché l'utente possa continuare a utilizzare
l'azionamento fino al raggiungimento dei valori di disinserzione. Dopo il raggiungimento di
tale soglia, il convertitore si disinserisce segnalando l’anomalia "Sovratemperatura" o
"Sovraccarico". Il tempo di disinserzione non è tuttavia definito e dipende dall'entità del
sovraccarico. Si può modificare solo la soglia di avviso e mantenere quindi un allarme
preventivo, eventualmente intervenendo dall'esterno nel processo di azionamento (ad es.
riduzione del carico, diminuzione della temperatura ambiente).
Schema logico
FP 8014
Sorveglianza termica parte di potenza
• r0036
CO: Sovraccarico della parte di potenza I2t
• r0037
CO: Parte di potenza, temperature
• p0290
Parte di potenza, reazione al sovraccarico
• r0293
CO: Parte di potenza, soglia di avviso, temperatura modello
• p0294
Avviso relativo alla parte di potenza per il sovraccarico I2t
• r2135.13
Guasto sovraccarico termico modulo potenza
• r2135.15
Avviso di sovraccarico termico della parte di potenza
Parametri
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
435
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
9.4.3
Protezione contro il blocco
Descrizione
L'anomalia "Motore bloccato" viene emessa solo quando il numero di giri dell'azionamento è
inferiore alla soglia del numero di giri impostabile in p2175. Per la regolazione vettoriale
deve essere ancora soddisfatta la condizione che prevede che il regolatore di velocità si trovi
al limite e che il controllo U/f abbia raggiunto il limite di corrente.
Al termine del ritardo di inserzione (p2177) viene emesso il messaggio "Motore bloccato" e
viene segnalata l'anomalia F07900.
Tramite p2144 si può disattivare l'abilitazione della sorveglianza di blocco.
Figura 9-21
Protezione contro il blocco
Schema logico
FP 8012
Segnali e funzione di sorveglianza - Segnalazioni relative alla coppia, motore
bloccato/danneggiato
• p2144
BI: Abilitazione sorveglianza blocco motore (negata)
• p2175
Soglia di velocità motore bloccato
• p2177
Tempo di ritardo motore bloccato
Parametri
Convertitori da incasso
436
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
9.4.4
Protezione contro lo stallo (solo con regolazione vettoriale)
Descrizione
Se nella regolazione del numero di giri con encoder si supera la soglia del numero di giri
impostata in p1744 per il riconoscimento di stallo, viene impostato r1408.11 (adattamento
del numero di giri, scostamento del numero di giri).
Se ai bassi regimi (inferiori a p1755 x (100 % - p1756)) viene superato il valore di soglia di
errore impostato in p1745, viene impostato r1408.12 (motore fuori sincronismo).
Se è impostato uno dei due segnali, dopo il tempo di ritardo in p2178 viene emessa
l'anomalia F07902 (motore in stallo).
Figura 9-22
Protezione contro lo stallo
Schema logico
FP 6730
Regolazione vettoriale - Interfaccia con il Motor Module (ASM, p0300 = 1)
FP 8012
Segnalazioni e sorveglianze - Segnalazioni relative alla coppia, motore
bloccato/danneggiato
• r1408
CO/BO: Parola di stato di regolazione 3
• p1744
Modello di motore, soglia di numero di giri, riconoscimento motore fuori
sincronismo
• p1745
Modello di motore, valore di soglia di errore, riconoscimento motore fuori
sincronismo
• p1755
Modello di motore, numero di giri di commutazione, funzionamento senza
encoder
• p1756
Modello di motore, numero di giri di commutazione isteresi, funzionamento
senza encoder
• p2178
Tempo di ritardo motore fuori sincronismo
Parametri
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
437
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
9.4.5
Protezione termica del motore
9.4.5.1
Descrizione
Descrizione
Il presupposto fondamentale della protezione termica del motore è il riconoscimento degli
stati critici. Dopo il superamento delle soglie di avviso sono disponibili reazioni sotto forma di
opzioni parametrizzabili (p0610) che consentono di continuare il funzionamento (ad es. a
potenza ridotta) impedendo una disinserzione immediata.
● La protezione può avvenire correttamente anche senza sensore di temperatura (p0600 =
0 o p4100 = 0). Le temperature delle diverse parti del motore (statore, ferro, rotore) sono
calcolate indirettamente tramite un modello di temperatura.
● La temperatura del motore viene rilevata direttamente collegando i sensori di
temperatura. Alla reinserzione o dopo un'interruzione di rete sono immediatamente
disponibili le temperature iniziali.
9.4.5.2
Collegamento del sensore di temperatura alla morsettiera utente TM31
Rilevamento della temperatura tramite KTY
Il collegamento avviene nel senso di passaggio del diodo sulla morsettiera del cliente
(TM31), in corrispondenza dei morsetti X522:7 (Temp+) e X522:8 (Temp-). La temperatura
misurata viene limitata a un valore compreso tra –140 e +188,6 °C che viene messo a
disposizione per l'ulteriore valutazione.
● Attivazione del rilevamento della temperatura del motore tramite un sensore esterno:
p0600 = 10.
In presenza della morsettiera utente TM31 e al termine della messa in servizio la
sorgente per il sensore esterno è impostata sulla morsettiera utente (p0603 = {TM31}
r4105).
● Impostazione del tipo di sensore di temperatura KTY: p4100 = 2.
Rilevamento della temperatura tramite PTC
Il collegamento avviene sulla morsettiera utente (TM31), in corrispondenza del morsetto
X522:7/8. Il valore di soglia per la commutazione in caso di avviso o anomalia è impostato a
1650 Ω. Al superamento della soglia, il valore di temperatura di -50 °C generato
artificialmente viene convertito internamente a +250 °C, quindi messo a disposizione per
l'ulteriore valutazione.
● Attivazione del rilevamento della temperatura del motore tramite un sensore esterno:
p0600 = 10.
In presenza della morsettiera utente TM31 e al termine della messa in servizio la
sorgente per il sensore esterno è impostata sulla morsettiera utente (p0603 = {TM31}
r4105).
● Impostazione del tipo di sensore di temperatura PTC: p4100 = 1.
Convertitori da incasso
438
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
9.4.5.3
Collegamento del sensore di temperatura su un Sensor Module
Rilevamento della temperatura tramite KTY
Il collegamento avviene nel senso di passaggio del diodo sul Sensor Module sui rispettivi
morsetti Temp- e Temp+ (vedere la sezione corrispondente nel capitolo "Installazione
elettrica").
● Attivazione del rilevamento della temperatura del motore tramite l'encoder 1: p0600 = 1.
● Impostazione del tipo di sensore di temperatura KTY: p0601 = 2.
Rilevamento della temperatura tramite PTC
Il collegamento avviene sul Sensor Module sui rispettivi morsetti Temp- e Temp+ (vedere la
sezione corrispondente nel capitolo "Installazione elettrica"). Il valore di soglia per la
commutazione in caso di avviso o anomalia è impostato a 1650 Ω.
● Attivazione del rilevamento della temperatura del motore tramite l'encoder 1: p0600 = 1.
● Impostazione del tipo di sensore di temperatura PTC: p0601 = 1.
9.4.5.4
Collegamento del sensore di temperatura direttamente sul Control Interface Module
Rilevamento della temperatura tramite KTY
Il collegamento avviene nel senso di passaggio del diodo sul Control Interface Module sui
morsetti X41:3 (Temp-) e X41:4 (Temp+).
● Attivazione del rilevamento della temperatura del motore tramite Motor Module: p0600 = 11.
● Impostazione del tipo di sensore di temperatura KTY: p0601 = 2.
Rilevamento della temperatura tramite PTC
Il collegamento avviene sul Control Interface Module sui morsetti X41:3 (Temp-) e X41:4
(Temp+). Il valore di soglia per la commutazione in caso di avviso o anomalia è impostato a
1650 Ω.
● Attivazione del rilevamento della temperatura del motore tramite Motor Module: p0600 = 11.
● Impostazione del tipo di sensore di temperatura PTC: p0601 = 1.
Rilevamento della temperatura tramite contatto a bimetallo normalmente chiuso
Il collegamento avviene sul Control Interface Module sui morsetti X41:3 (Temp-) e X41:4
(Temp+). Il valore di soglia per la commutazione in caso di avviso o anomalia è impostato a
100 Ω.
● Attivazione del rilevamento della temperatura del motore tramite Motor Module: p0600 = 11.
● Impostazione del tipo di sensore di temperatura contatto a bimetallo normalmente chiuso:
p0601 = 4.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
439
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
Rilevamento della temperatura tramite PT100
Il collegamento avviene sul Control Interface Module sui morsetti X41:3 (Temp-) e X41:4
(Temp+). L'impostazione dell'offset di temperatura per il valore di misura PT100 può
avvenire tramite p0624.
● Attivazione del rilevamento della temperatura del motore tramite Motor Module: p0600 = 11.
● Impostazione del tipo di sensore di temperatura PT100: p0601 = 5.
9.4.5.5
Valutazione del sensore di temperatura
Rilevamento della temperatura tramite KTY o PT100
● Al raggiungimento della soglia di avviso (impostabile tramite p0604, stato di fornitura
dopo la messa in servizio 120° C) viene emesso l'avviso A07910.
Tramite il parametro p0610 si può impostare la reazione dell'azionamento all'avviso
emesso:
– 0: nessuna reazione, solo avviso, nessuna riduzione di I_max
– 1: Avviso con riduzione di I_max e anomalia (F07011)
– 2: Avviso e anomalia (F07011), nessuna riduzione di l_max
– 12: Avviso e anomalia (F07011), nessuna riduzione di l_max, salvataggio della
temperatura
● Al raggiungimento della soglia di anomalia (impostabile tramite p0605, stato di fornitura
dopo la messa in servizio 155 °C) viene segnalata l'anomalia F07011 in abbinamento
all'impostazione in p0610.
Rilevamento della temperatura tramite PTC o contatto a bimetallo normalmente chiuso
● Dopo la risposta del PTC o del contatto a bimetallo normalmente chiuso viene emesso
l'avviso A07910.
● Trascorso l'intervallo di attesa in p0606 viene segnalata l'anomalia F07011.
Sorveglianza dei sensori per rottura conduttore o cortocircuito
La sorveglianza per rilevare un cortocircuito nel cavo del sensore è possibile per un PTC e
KTY84. La sorveglianza per rilevare una rottura conduttore è possibile per un sensore
KTY84:
Se il valore della sorveglianza della temperatura del motore non è compreso nel campo
previsto di -140 ... +250 °C, questo significa che si sono verificati una rottura conduttore e/o
un cortocircuito del cavo del sensore; viene quindi emesso l'avviso A07015 "Avviso sensore
della temperatura motore". Trascorso l'intervallo di attesa in p0607 viene segnalata
l’anomalia F07016 "Anomalia sensore della temperatura motore".
L'anomalia F07016 può essere esclusa tramite il parametro p0607 = 0. Se è collegato un
motore asincrono, l'azionamento continua a funzionare con i dati calcolati del modello di
motore termico.
Se si riscontra che il sensore di temperatura del motore impostato in p0600 non è collegato,
viene emesso l'allarme A07820 "Sensore di temperatura non collegato".
Convertitori da incasso
440
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
9.4.5.6
Modelli termici del motore
Vengono impiegati modelli termici del motore per garantire la protezione termica del motore
anche nel funzionamento senza sensore di temperatura o con sensore di temperatura
disinserito (p0600 = 0)
Risulta utile anche l'impiego simultaneo di sensori di temperatura e di un modello termico del
motore. Ad es., un aumento di temperatura estremamente rapido che non viene riconosciuto
in tempo dai sensori può danneggiare un motore. Questa situazione può verificarsi nei
motori con capacità termica ridotta.
A seconda del modello termico, l'aumento di temperatura viene assegnato a diverse parti del
motore (statore, rotore) oppure viene calcolato a partire dalla corrente del motore e dalla
costante di tempo termica. È anche possibile utilizzare una combinazione di modello termico
del motore con sensori di temperatura aggiuntivi.
ATTENZIONE
Danni materiali da surriscaldamento in caso di funzionamento del motore senza sensore
Un modello termico del motore non può sostituire completamente un sensore. In caso di
installazione errata, temperatura ambiente elevata o parametrizzazione errata, il modello
termico non può proteggere il motore. I modelli termici del motore non sono in grado di
rilevare o di considerare le temperature ambiente o la temperatura iniziale del motore
senza sensori di temperatura. Ciò può provocare un surriscaldamento del motore e di
conseguenza dei danni materiali.
• Non impostare i tipi di termica motore se può verificarsi un incremento di temperatura
ambiente o di temperatura iniziale del motore.
Modello termico del motore 1 (nei motori sincroni a magneti permanenti)
Con il modello termico I2t del motore, oltre al rilevamento tramite un sensore di temperatura,
viene inoltre calcolato il riscaldamento degli avvolgimenti del motore per effetto dei carichi
dinamici dello stesso.
Il modello termico I2t del motore si attiva con p0612.0 = 1 e calcola il carico del motore
(r0034) a partire dai seguenti valori:
● Valore attuale di corrente non livellato (r0068[0])
● Corrente da fermo del motore (p0318),
● Modello motore I2t, costante di tempo termica (p0611)
● Temperatura misurata del motore (r0035) o temperatura ambiente del motore (p0625) nel
funzionamento senza sensore di temperatura
Al superamento della soglia di anomalia (impostabile con p0605, stato di fornitura dopo la
messa in servizio 155 °C), viene emesso l'avviso A07012 "Sovratemperatura modello
motore I2t".
Al raggiungimento della soglia di anomalia del modello motore I2t (p0615) viene segnalata
l'anomalia F07011 in abbinamento all'impostazione in p0610.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
441
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
Modello termico del motore 2 (nei motori asincroni)
Il modello termico del motore 2 viene utilizzato solo nei motori asincroni. È un modello
termico a 3 masse.
Ciò consente di proteggere termicamente il motore anche nel funzionamento senza encoder
di temperatura o con sensore di temperatura disattivato (p0600 = 0).
Il modello termico del motore a 3 masse viene attivato tramite p0612.1 = 1. La massa totale
del motore viene immessa tramite p0344.
Nel modello a 3 masse, la massa totale del motore è ripartita nel seguente modo:
● p0617 = massa di ferro termicamente attiva (statore: pacchi di lamierini e custodie) in
percentuale di p0344
● p0618 = massa di rame termicamente attiva (statore: avvolgimenti) in percentuale di
p0344
● p0619 = massa del rotore termicamente attiva in percentuale di p0344
● p0625 = temperatura ambiente
● p0626 = sovratemperatura ferro dello statore
● p0627 = sovratemperatura avvolgimento statorico
● p0628 = sovratemperatura avvolgimento rotorico
Le sovratemperature del motore vengono calcolate sulla base dei valori di misura del
motore. Le sovratemperature calcolate vengono visualizzate nei seguenti parametri:
● r0630 Modello di temperatura motore, temperatura ambiente
● r0631 Modello di temperatura motore, temperatura ferro dello statore
● r0632 Modello di temperatura motore, temperatura avvolgimento statorico
● r0633 Modello di temperatura motore, temperatura rotore
Nel funzionamento con encoder KTY il valore di temperatura calcolato del modello a 3
masse viene adattato in permanenza al valore di temperatura misurato. Dopo la
disattivazione dell'encoder di temperatura (p0600 = 0) il calcolo prosegue con l'ultimo valore
di temperatura.
9.4.5.7
9.4.5.8
Schema logico
FP 8016
Sorveglianza termica motore
FP 8017
Modelli termici del motore
FP 9576
TM31 - Analisi della temperatura (KTY/PTC)
Parametri
Valutazione del sensore di temperatura
CO: Temperatura motore
• r0035
• p0600
Sensore della temperatura motore per sorveglianza
Convertitori da incasso
442
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
• p0601
Sensore della temperatura motore, tipo di sensore
• p0603
Temperatura motore, sorgente del segnale
• p0604
Sovratemperatura motore, soglia di avviso
• p0605
Sovratemperatura motore, soglia di anomalia
• p0606
Sovratemperatura motore, temporizzatore
• p0607
Errore sensore della temperatura, temporizzatore
• p0610
Reazione sovratemperatura motore
• p0614
Adattamento di resistenza termico, fattore di riduzione
• p0624
Offset temperatura del motore PT100
• p4100
TM31 Rilevamento di temperatura, tipo di sensore
• r4105
CO: TM31 Rilevamento di temperatura, valore reale
Modello termico del motore 1 (nei motori sincroni a magneti permanenti)
• r0034
CO: Carico massimo motore
• r0068[0]
CO: Valore attuale di corrente non livellato
• p0318
Corrente da fermo del motore
• p0605
Sovratemperatura motore, soglia di anomalia
• p0610
Reazione sovratemperatura motore
• p0611
Modello motore I2t, costante di tempo termica
• p0612
Configurazione modello motore termico
• p0615
Modello motore I2t, soglia di anomalia
• p0625
Motore, temperatura ambiente
Modello termico del motore 2 (nei motori asincroni)
• p0344
Massa del motore
• p0612
Configurazione modello motore termico
• p0617
Componente di ferro dello statore rilevante dal punto di vista termico
• p0618
Componente di rame dello statore rilevante dal punto di vista termico
• p0619
Massa dello statore rilevante dal punto di vista termico
• p0625
Motore, temperatura ambiente
• p0626
Sovratemperatura motore, ferro dello statore
• p0627
Sovratemperatura motore, avvolgimento dello statore
• p0628
Sovratemperatura motore, avvolgimento del rotore
• r0630
Mod_term_mot, temperatura ambiente
• r0631
Mod_term_mot, temperatura ferro dello statore
• r0632
Mod_term_mot, temperatura avvolgimento dello statore
• r0633
Mod_term_mot, temperatura avvolgimento del rotore
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
443
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
9.4.6
Rilevamento della temperatura tramite TM150
9.4.6.1
Descrizione
Il Terminal Module 150 (TM150) dispone di 6 morsetti di collegamento a 4 poli per sensori di
temperatura. I sensori di temperatura possono essere collegati con la tecnica a 1x2-, 1x3- o
1x4 fili. Nella tecnica 2 sensori a 2 fili possono essere valutati fino a 12 canali di ingresso.
Nell'impostazione di fabbrica possono essere valutati 12 canali di ingresso. I canali di
temperatura possono essere riuniti in max. 3 gruppi e valutati in comune.
È possibile collegare e valutare sensori di temperatura di tipo PTC, KTY84, contatto
bimetallico normalmente chiuso, PT100 e PT1000. Le soglie di anomalia o avviso dei valori
della temperatura possono essere impostate tra -99 °C e 251 °C.
I sensori di temperatura vengono collegati tramite le morsettiere X531 ... X536 secondo le
indicazioni riportate nella tabella seguente.
Gli ingressi di temperatura del TM150 non sono separati galvanicamente.
Selezione dei tipi di sensore
● Con p4100[0...11] si imposta il tipo di sensore per il canale di temperatura.
● r4105[0...11] visualizza il valore attuale del canale di temperatura.
– In caso di sensori di temperatura a commutazione, come ad es. PTC e contatti
bimetallici normalmente chiusi, vengono visualizzati simbolicamente solo due valori
limite:
- r4105[0...11] = -50 °C: il valore attuale di temperatura è inferiore alla temperatura
nominale di intervento.
- r4105[0...11] = +250 °C: il valore attuale di temperatura è superiore alla temperatura
nominale di intervento.
Nota
PTC e contatto normalmente chiuso bimetallico
La visualizzazione in r4105[0...11] non corrisponde al valore attuale di temperatura effettivo.
Tabella 9- 13 Selezione dei tipi di sensore
Valore di p4100[0...11]
Sensore di temperatura
Campo della temperatura visualizzata
r4105[0...11]
0
Analisi disattivata
-
1
Termistore PTC
-50 °C o +250 °C
2
KTY84
-99 °C ... +250 °C
4
Contatto a bimetallo
normalmente chiuso
-50 °C o +250 °C
5
PT100
-99 °C ... +250 °C
6
PT1000
-99 °C ... +250 °C
Convertitori da incasso
444
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
Misurazione delle resistenze dei conduttori
Se si utilizzano sensori a 2 conduttori (tecnica 1 sensore a 2 fili o 2 sensori a 2 fili), per
migliorare la precisione di misura è possibile misurare e memorizzare la resistenza dei
conduttori.
Procedura per determinare la resistenza dei cavi:
1. Selezionare il metodo di misura (1x2 o 2x2) per il relativo blocco terminale (p4108[0...5] =
0, 1).
2. Impostare il tipo di sensore desiderato per il relativo canale (p4100[x] = 1 ... 6, x = 0...5 o
0...11).
3. Bypassare il sensore da collegare (cortocircuitare il cavo sensore in prossimità del
sensore).
4. Collegare i conduttori del sensore ai relativi morsetti 1(+), 2(-) o 3(+), 4(-).
5. Nel relativo canale, avviare la misura della resistenza del conduttore (p4109[x] = 1).
6. Dopo p4109[x] = 0 verificare il valore della resistenza misurato in p4110[x].
7. Rimuovere i ponticelli sul sensore di temperatura.
La resistenza del conduttore misurata viene quindi considerata nella valutazione della
temperatura. In p4110[0...11] è memorizzato il valore della resistenza del conduttore.
Nota
Resistenza cavo
Il valore della resistenza del cavo in p4110[0...11] può anche essere immesso direttamente.
Filtri di rete
Per attenuare i disturbi irradiati della linea di alimentazione è presente un filtro. Il filtro è
impostabile con p4121 a una frequenza nominale di rete di 50 Hz o 60 Hz.
9.4.6.2
Misura con max. 6 canali
Rilevamento della temperatura con un sensore con la tecnica a 2 fili
Con p4108[0...5] = 0 si rileva un sensore con la tecnica a 2 fili su un connettore a 4 fili sui
morsetti 1(+) e 2(-).
I morsetti 3 e 4 restano aperti.
Rilevamento della temperatura con un sensore con la tecnica a 3 fili
Con p4108[0...5] = 2 si rileva un sensore con la tecnica a 3 fili su un connettore a 4 fili sui
morsetti 3(+) e 4(-).
Il conduttore di misura viene collegato al morsetto 1(+).
I morsetti 2(-) e 4(-) vanno cortocircuitati.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
445
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
Rilevamento della temperatura con un sensore con la tecnica a 4 fili
Con p4108[0...5] = 3 si rileva un sensore con la tecnica a 4 fili su un connettore a 4 fili sui
morsetti 3(+) e 4(-).
Il conduttore di misura viene collegato ai morsetti 1(+) e 2(-).
9.4.6.3
Misura con max. 12 canali
Rilevamento della temperatura con due sensori con la tecnica a 2 fili
Con p4108[0...5] = 1 si rilevano due sensori con la tecnica a 2 fili.
Il primo sensore viene collegato ai morsetti 1(+) e 2(-).
Il secondo sensore (numero = primo sensore + 6) è collegato ai morsetti 3(+) e 4(-).
Collegando due sensori con la tecnica a 2 fili al morsetto X531, il primo sensore viene
assegnato al canale di temperatura 1. Il secondo sensore viene assegnato al canale 7 (1+6).
Nota
Schema di collegamento per 12 canali di temperatura
I sensori di temperatura su un TM150 non vengono numerati in modo continuo. I primi 6
canali di temperatura mantengono la numerazione da 0 a 5. Gli altri 6 canali di temperatura
vengono numerati continuativamente da 6 a 11, a partire dal morsetto X531
Esempio per 8 canali di temperatura:
● 2 sensori a 2 fili sul morsetto X531: p4108[0] = 1 ≙ il sensore 1 è sul canale 0 e il sensore
2 è sul canale 6
● 2x2 conduttori sul morsetto X532: p4108[1] = 1 ≙ il sensore 1 è sul canale 1 e il sensore 2
è sul canale 7
● 1x3 conduttori sul morsetto X533: p4108[2] = 2 ≙ il sensore 1 è sul canale 2
● 1x3 conduttori sul morsetto X534: p4108[3] = 2 ≙ il sensore 1 è sul canale 3
● 1x4 conduttori sul morsetto X535: p4108[4] = 3 ≙ il sensore 1 è sul canale 4
● 1x2 conduttori sul morsetto X536: p4108[5] = 0 ≙ il sensore 1 è sul canale 5
9.4.6.4
Formazione di gruppi di sensori di temperatura
Con p4111[0...2] è possibile raggruppare i canali di temperatura. Per ogni gruppo vengono
messi a disposizione, a partire dai valori attuali della temperatura (r4105[0...11], i seguenti
valori calcolati:
● Massimo: r4112[0...2], (indice 0,1,2 = gruppo 0,1,2)
● Minimo: r4113[0...2]
● Valore medio: r4114[0...2]
Convertitori da incasso
446
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
Esempio:
Il valore attuale della temperatura dei canali 0, 3, 7 e 9 deve essere riepilogato nel gruppo 1:
● p4111[1].0 = 1
● p4111[1].3 = 1
● p4111[1].7 = 1
● p4111[1].9 = 1
I valori calcolati del gruppo 1 sono disponibili nei parametri seguenti per l'ulteriore
elaborazione:
● r4112[1] = massimo
● r4113[1] = minimo
● r4114[1] = valore medio
Nota
Formazione di gruppi di canali di temperatura
Raggruppare solo i sensori di temperatura a misura continua. Ai sensori di temperatura a
commutazione PTC e interruttori bimetallici normalmente chiusi vengono assegnate solo le
due temperature -50 °C e +250 °C, a seconda dello stato.
All'interno di un gruppo con sensori di temperatura a misura continua, il calcolo dei valori
massimo/minimo/medio risulta fortemente falsato se si tiene conto dei sensori di temperatura
a commutazione.
9.4.6.5
Valutazione dei canali di temperatura
Per ogni singolo canale dei 12 canali di temperatura è possibile impostare una soglia di
avviso e una soglia di anomalia in p4102[0...23] (indici parametri pari: soglie di avviso, indici
parametri dispari: soglie di anomalia). Le soglie di temperatura sono impostabili per ogni
canale da -99 °C a +251 °C. Per p4102[0...23] = 251 la valutazione della soglia
corrispondente è disattivata.
Tramite p4118[0...11] è possibile impostare per ogni canale un'isteresi per le soglie di
anomalia e di avviso in p4102[0...23].
Per le soglie di avviso vale:
● Se il valore attuale di temperatura relativo a un canale supera la soglia di avviso
impostata (r4105[x] > p4102[2x]), viene emesso l'avviso corrispondente.
Contemporaneamente viene avviato il temporizzatore p4103[0...11].
● L'avviso resta presente finché il valore attuale di temperatura (r4105[x]) raggiunge la
soglia di avviso (p4102[2x]) - isteresi (p4118[x]) o scende al di sotto di questo valore.
● Se dopo che è trascorso il tempo del temporizzatore il valore attuale della temperatura è
ancora superiore alla soglia di avviso, viene emessa un'anomalia corrispondente.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
447
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
Per le soglie di anomalia vale:
● Se il valore attuale di temperatura relativo a un canale supera la soglia di anomalia
impostata (r4105[x] > p4102[2x+1]), viene emessa l'anomalia corrispondente.
● L'anomalia resta presente finché il valore attuale di temperatura (r4105[x]) raggiunge la
soglia di anomalia (p4102[2x+1]) - isteresi (p4118[x]) o scende al di sotto di questo valore
e l'anomalia è stata confermata.
Con p4119[0...11] è possibile attivare per ogni canale un filtro per il livellamento del segnale
di temperatura.
La costante di tempo del filtro dipende dal numero di canali di temperatura attivi e può
essere letta in r4120.
Guasto di un sensore all'interno di un gruppo
Con il parametro p4117[0...2] è impostabile la reazione al guasto di un sensore di
temperatura all'interno di un gruppo:
● p4117[x] = 0: il sensore guasto non viene considerato all'interno del gruppo.
● p4117[x] = 1: se un sensore è guasto, per il valore massimo, il valore minimo e il valore
medio del gruppo viene emesso il valore -300 °C.
9.4.6.6
9.4.6.7
Schema logico
FP 9625
TM150 - Struttura della valutazione della temperatura (canale 0...11)
FP 9626
TM150 - Valutazione della temperatura, tecnica a 1x2, 3 o 4 fili (canale 0...5)
FP 9627
TM150 - Valutazione della temperatura 2 sensori a 2 fili (canale 0 ... 11)
Parametri
• p4100[0...11] TM150 Tipo di sensore
• r4101[0...11]
TM150 Resistenza sensore
• p4102[0...23] TM150 Soglia di anomalia/soglia di avviso
• p4103[0...11] TM150 Tempo di ritardo
• r4104.0...23
BO: TM150 Valutazione della temperatura, stato
• r4105[0...11]
CO: TM150 Valore attuale della temperatura
• p4108[0...5]
TM150 Morsettiera, metodi di misura
• p4109[0...11] TM150 Resistenza conduttori, misura
• p4110[0...11] TM150 Resistenza conduttori, valore
• p4111[0...2]
TM150 Gruppo, assegnazione canali
• r4112[0...2]
CO: TM150 Gruppo valore attuale temperatura massimo
• r4113[0...2]
CO: TM150 Gruppo valore attuale temperatura minimo
Convertitori da incasso
448
Istruzioni operative, 04/2014, A5E00386872A
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
• r4114[0...2]
CO: TM150 Gruppo valore attuale temperatura medio
• p4117[0...2]
TM150 Effetto errore sensore gruppo
• p4118[0...11] TM150 Soglia di anomalia/soglia di avviso, isteresi
• p4119[0...11] TM150 Attivazione/disattivazione livellamento
• r4120
TM150 Filtro di temperatura, costante di tempo
• p4121
TM150 Frequenza nominale di rete del filtro
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
449
Funzioni, funzioni di sorveglianza e funzioni di protezione
9.4 Funzioni di sorveglianza e di protezione
Convertitori da incasso
450
Istruzioni operative, 04/2014, A5E00386872A
Diagnostica / Anomalie e avvisi
10.1
10
Contenuto del capitolo
Questo capitolo descrive:
● le avvertenze relative alle varie possibilità di diagnostica e all'eliminazione delle cause di
errore
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
451
Diagnostica / Anomalie e avvisi
10.2 Diagnostica
10.2
Diagnostica
Descrizione
Questa sezione descrive la procedura per circoscrivere le cause di errore e le relative
contromisure per la loro eliminazione.
Nota
Errori o condizioni anomale
Nel caso dovessero verificarsi errori o condizioni anomale sull'apparecchio, è necessario
verificare immediatamente le possibili cause e prendere le relative contromisure. Se non è
possibile identificare le cause dell'errore o se vengono rilevati componenti difettosi, è
necessario contattare l'assistenza Siemens della filiale più vicina fornendo una descrizione
dettagliata delle condizioni di errore. Gli indirizzi dei partner di riferimento sono riportati nella
prefazione.
10.2.1
Diagnostica tramite LED
Control Unit
Tabella 10- 1 Descrizione dei LED della Control Unit CU320-2 DP
LED
Colore
Stato
Descrizione
RDY (READY)
---
Spento
Alimentazione di corrente dell'elettronica mancante oppure al di
fuori del campo di tolleranza ammesso.
Verde
Luce fissa
Il componente è pronto per il funzionamento e la comunicazione
ciclica DRIVE-CLiQ è in corso.
La Control Unit è in attesa della prima messa in servizio.
Lampeggio 0,5 Hz
Messa in servizio/Reset
Lampeggio 2 Hz
Scrittura sulla scheda di memoria
Rosso
Lampeggio 2 Hz
Errori generici
Rosso /
verde
Lampeggio 0,5 Hz
Control Unit pronta per il funzionamento.
Mancano tuttavia le licenze software.
Arancione
Lampeggio 0,5 Hz
Aggiornamento del firmware dei componenti DRIVE-CLiQ collegati
in corso.
Lampeggio 2 Hz
Aggiornamento del firmware dei componenti completato. Attesa di
POWER ON del relativi componenti.
Lampeggio 2 Hz
Riconoscimento dei componenti tramite LED attivato (p0124[0]).
Verde/
arancione
oppure
rosso/
arancione
Nota:
Entrambe le possibilità dipendono dallo stato dei LED
all'attivazione tramite p0124[0] = 1.
Convertitori da incasso
452
Istruzioni operative, 04/2014, A5E00386872A
Diagnostica / Anomalie e avvisi
10.2 Diagnostica
LED
Colore
Stato
Descrizione
COM
PROFIdrive in
funzionamento
ciclico
---
Spento
La comunicazione ciclica non è (ancora) avvenuta.
Nota:
PROFIdrive è pronto per la comunicazione quando la Control Unit
è pronta per il funzionamento (vedere LED RDY).
Verde
Luce fissa
La comunicazione ciclica è in corso.
Lampeggio 0,5 Hz
La comunicazione ciclica non avviene ancora in modo completo.
Cause possibili:
- Il controller non trasmette valori di riferimento.
- Nel funzionamento con sincronizzazione di clock il controller non
trasmette alcun Global Control (GC) o ne trasmette uno errato.
Lampeggio 0,5 Hz
Il master PROFIBUS invia una parametrizzazione / configurazione
errata
Lampeggio 2 Hz
La comunicazione ciclica del bus è stata interrotta o non è stata
stabilita.
---
Spento
Alimentazione dell'elettronica assente o al di fuori del campo di
tolleranza ammesso.
Il componente non è pronto per il funzionamento.
Option Board assente oppure non è stato creato l'oggetto di
azionamento corrispondente.
Verde
Luce fissa
Option Board pronta al funzionamento.
Lampeggio 0,5 Hz
In funzione dell'Option Board installato.
Rosso
Lampeggio 2 Hz
È presente almeno un'anomalia del componente.
Option Board non pronta al funzionamento (ad es. dopo
l'inserzione).
RDY e COM
Rosso
Lampeggio 2 Hz
Errore del bus - La comunicazione è stata interrotta.
RDY e OPT
Arancione
Lampeggio 0,5 Hz
Aggiornamento del firmware in corso per la Option Board CBE20
collegata.
Rosso
OPT
(OPZIONE)
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
453
Diagnostica / Anomalie e avvisi
10.2 Diagnostica
Tabella 10- 2 Descrizione dei LED della Control Unit CU320-2 PN
LED
Colore
Stato
Descrizione
RDY (READY)
---
Spento
Alimentazione di corrente dell'elettronica mancante oppure al di
fuori del campo di tolleranza ammesso.
Verde
Luce fissa
Il componente è pronto per il funzionamento e la comunicazione
ciclica DRIVE-CLiQ è in corso.
La Control Unit è in attesa della prima messa in servizio.
Lampeggio 0,5 Hz
Messa in servizio/Reset
Lampeggio 2 Hz
Scrittura sulla scheda di memoria
Rosso
Lampeggio 2 Hz
Errori generici
Rosso /
verde
Lampeggio 0,5 Hz
Control Unit pronta per il funzionamento.
Mancano tuttavia le licenze software.
Arancione
Lampeggio 0,5 Hz
Aggiornamento del firmware dei componenti DRIVE-CLiQ collegati
in corso.
Lampeggio 2 Hz
Aggiornamento del firmware dei componenti completato. Attesa di
POWER ON del relativi componenti.
Verde/
arancione
oppure
rosso/
arancione
Lampeggio 2 Hz
Riconoscimento dei componenti tramite LED attivato (p0124[0]).
---
Spento
La comunicazione ciclica non è (ancora) avvenuta.
Nota:
PROFIdrive è pronto per la comunicazione quando la Control Unit
è pronta per il funzionamento (vedere LED RDY).
Verde
Luce fissa
La comunicazione ciclica è in corso.
Lampeggio 0,5 Hz
La comunicazione ciclica non avviene ancora in modo completo.
Cause possibili:
- Il controller non trasmette valori di riferimento.
- Nel funzionamento con sincronizzazione di clock il controller non
trasmette alcun Global Control (GC) o ne trasmette uno errato.
- È selezionato "Shared Device" (p8929 = 2) e vi è un solo
controller collegato.
Lampeggio 0,5 Hz
Errore bus, parametrizzazione/configurazione errata
Lampeggio 2 Hz
La comunicazione ciclica del bus è stata interrotta o non è stata
stabilita.
---
Spento
Alimentazione dell'elettronica assente o al di fuori del campo di
tolleranza ammesso.
Il componente non è pronto per il funzionamento.
Option Board assente oppure non è stato creato l'oggetto di
azionamento corrispondente.
Verde
Luce fissa
Option Board pronta al funzionamento.
COM
PROFIdrive in
funzionamento
ciclico
Rosso
OPT
(OPZIONE)
Nota:
Entrambe le possibilità dipendono dallo stato dei LED
all'attivazione tramite p0124[0] = 1.
Lampeggio 0,5 Hz
In funzione dell'Option Board installato.
Rosso
Lampeggio 2 Hz
È presente almeno un'anomalia del componente.
Option Board non pronta al funzionamento (ad es. dopo
l'inserzione).
RDY e COM
Rosso
Lampeggio 2 Hz
Errore del bus - La comunicazione è stata interrotta.
RDY e OPT
Arancione
Lampeggio 0,5 Hz
Aggiornamento del firmware in corso per la Option Board CBE20
collegata.
Convertitori da incasso
454
Istruzioni operative, 04/2014, A5E00386872A
Diagnostica / Anomalie e avvisi
10.2 Diagnostica
Morsettiera utente TM31
Tabella 10- 3 Descrizione dei LED del TM31
LED
READY
Colore
Stato
Descrizione
---
Spento
Alimentazione di corrente dell'elettronica mancante oppure al di fuori del
campo di tolleranza ammesso.
Verde
Luce fissa
Il componente è pronto per il funzionamento e la comunicazione ciclica
DRIVE-CLiQ è in corso.
Arancione
Luce fissa
Viene stabilita la comunicazione DRIVE-CLiQ.
Rosso
Luce fissa
È presente almeno un'anomalia di questo componente.
Nota:
Il LED viene comandato indipendentemente dalla riprogettazione dei
messaggi corrispondenti.
Verde/rosso
Lampeggio 0,5
Hz
Download del firmware in corso.
Lampeggio 2
Hz
Download del firmware completato. Attesa di POWER ON.
Verde/
Lampeggio
arancione
oppure
rosso/arancione
Riconoscimento del componente tramite LED attivato (p0154).
Nota:
Le due possibilità dipendono dallo stato del LED all'attivazione tramite
p0154 = 1.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
455
Diagnostica / Anomalie e avvisi
10.2 Diagnostica
Control Interface Module – unità di interfaccia nel Power Module
Tabella 10- 4 Significato dei LED "READY" e "DC LINK" sul Control Interface Module
LED, stato
READY
Descrizione
DC LINK
Spento
Spento
Alimentazione di corrente dell'elettronica mancante oppure al di fuori del campo di
tolleranza ammesso.
Verde
Spento
Il componente è pronto per il funzionamento e la comunicazione ciclica DRIVE-CLiQ è
in corso.
Arancione
Il componente è pronto per il funzionamento e la comunicazione ciclica DRIVE-CLiQ è
in corso.
La tensione del circuito intermedio è presente.
Rosso
Il componente è pronto per il funzionamento e la comunicazione ciclica DRIVE-CLiQ è
in corso.
La tensione del circuito intermedio è troppo elevata.
Arancione
Arancione
Viene stabilita la comunicazione DRIVE-CLiQ.
Rosso
---
È presente almeno un'anomalia di questo componente.
Nota:
Il LED viene comandato indipendentemente dalla riprogettazione dei messaggi
corrispondenti.
Lampeggio 0,5
Hz:
verde rosso
---
Download del firmware in corso.
Lampeggio 2 Hz: --verde rosso
Download del firmware completato. Attesa di POWER ON.
Lampeggio 2 Hz: --verde arancione
oppure
rosso arancione
Il riconoscimento del componente tramite LED è attivato (p0124).
Nota:
Le due possibilità dipendono dallo stato del LED all'attivazione tramite p0124 = 1.
Tabella 10- 5 Significato dei LED "POWER OK" sul Control Interface Module
LED
Colore
Stato
Descrizione
POWER OK
Verde
Spento
Tensione del circuito intermedio < 100 V e tensione su -X9:1/2 minore
di 12 V.
Acceso
Il componente è pronto al funzionamento.
Lampeggio
È presente un'anomalia. Se dopo un POWER ON la spia continua a
lampeggiare, contattare il centro di servizio SIEMENS.
AVVERTENZA
Pericolo di morte per contatto con parti sotto tensione del circuito intermedio
Indipendentemente dallo stato del LED "DC LINK" può essere sempre presente una
tensione pericolosa del circuito intermedio che al contatto di parti sotto tensione può
provocare lesioni gravi o la morte.
• Rispettare le avvertenze di sicurezza sul componente.
Convertitori da incasso
456
Istruzioni operative, 04/2014, A5E00386872A
Diagnostica / Anomalie e avvisi
10.2 Diagnostica
SMC30 – Analisi trasduttore
Tabella 10- 6 Descrizione dei LED dell'SMC30
LED
READY
OUT>5 V
Colore
Stato
Descrizione
---
Spento
Alimentazione di corrente dell'elettronica mancante oppure al di fuori del
campo di tolleranza ammesso.
Verde
Luce fissa
Il componente è pronto per il funzionamento e la comunicazione ciclica
DRIVE-CLiQ è in corso.
Arancione
Luce fissa
Viene stabilita la comunicazione DRIVE-CLiQ.
Rosso
Luce fissa
È presente almeno un'anomalia di questo componente.
Nota:
Il LED viene comandato indipendentemente dalla riprogettazione dei
messaggi corrispondenti.
Verde/rosso
Lampeggio 0,5
Hz
Download del firmware in corso.
Lampeggio 2
Hz
Download del firmware completato. Attesa di POWER ON.
Verde/
Lampeggio
arancione
oppure
rosso/arancione
Riconoscimento del componente tramite LED attivato (p0144).
Nota:
Le due possibilità dipendono dallo stato del LED all'attivazione tramite
p0144 = 1.
---
Spento
Alimentazione dell'elettronica mancante oppure al di fuori del campo di
tolleranza ammesso.
Alimentazione di tensione ≤ 5 V.
Arancione
Luce fissa
Alimentazione dell'elettronica presente per il sistema di misura.
Alimentazione della tensione > 5 V.
Attenzione:
Occorre garantire che l'encoder collegato possa essere utilizzato con
un'alimentazione di tensione a 24 V.
Il funzionamento a 24 V di un encoder previsto per il collegamento a 5 V
può provocare la distruzione dell'elettronica dell'encoder.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
457
Diagnostica / Anomalie e avvisi
10.2 Diagnostica
TM150 - Sensore di temperatura modulo
Tabella 10- 7 Descrizione dei LED del TM150
LED
READY
Colore
Stato
Spento
L'alimentazione di corrente dell'elettronica manca oppure è al di fuori del
campo di tolleranza ammesso.
Verde
Luce fissa
Il componente è pronto per il funzionamento e la comunicazione ciclica
DRIVE-CLiQ è in corso.
Arancione
Luce fissa
Viene stabilita la comunicazione DRIVE-CLiQ.
Rosso
Luce fissa
È presente almeno un'anomalia di questo componente.
Nota:
Il LED viene gestito indipendentemente dalla riprogettazione dei relativi
messaggi.
Verde/rosso
Lampeggio
0,5 Hz
Download del firmware in corso.
Lampeggio
2 Hz
Il download del firmware è terminato.
Attendere il POWER ON.
Verde/
Lampeggio
arancione
2 Hz
oppure
rosso/arancione
10.2.2
Descrizione
-
Riconoscimento del componente tramite LED attivato (p0154).
Nota:
Le due possibilità dipendono dallo stato del LED all'attivazione tramite
p0154 = 1.
Diagnostica tramite parametri
Tutti gli oggetti: Parametri di diagnostica importanti (per i dettagli vedere il Manuale delle liste)
Parametri
Nome
Descrizione
r0945
Codice anomalia
Indica il numero dell'anomalia. L'indice 0 rappresenta il caso di guasto più recente (ultima anomalia che si è
verificata).
r0948
Tempo in cui è avvenuta l'anomalia in millisecondi
Indica il runtime di sistema in ms in cui si è verificata l'anomalia.
r0949
Valore anomalia
Indica le informazioni aggiuntive sull'anomalia verificatasi. Queste informazioni consentono una diagnostica
dettagliata del guasto verificatosi.
r2109
Tempo di eliminazione anomalia in millisecondi
Indica il runtime di sistema in ms in cui è stata eliminata l'anomalia.
r2122
Codice di avviso
Visualizzazione dei numeri degli avvisi generati.
r2123
Tempo in cui è avvenuto l'avviso in millisecondi
Indica il runtime di sistema in ms in cui si è verificato l'avviso.
r2124
Valore avviso
Indica le informazioni aggiuntive sull'avviso verificatosi. Queste informazioni consentono una diagnostica
dettagliata dell'avviso verificatosi.
Convertitori da incasso
458
Istruzioni operative, 04/2014, A5E00386872A
Diagnostica / Anomalie e avvisi
10.2 Diagnostica
Parametri
Nome
Descrizione
r2125
Tempo di eliminazione avviso in millisecondi
Indica il runtime di sistema in ms in cui è stata eliminato l'avviso.
Control Unit: Parametri di diagnostica importanti (per i dettagli vedere il Manuale delle liste)
Parametri
Nome
Descrizione
r0002
Segnalazione di funzionamento della Control Unit
Segnalazione di funzionamento per la Control Unit
r0018
Versione del firmware della Control Unit
Indica la versione del firmware della Control Unit. Dalla descrizione dei parametri nel Manuale delle liste si
possono ricavare i parametri di visualizzazione della versione del firmware degli altri componenti collegati.
r00037
Temperatura della Control Unit
Visualizzazione della temperatura misurata sulla Control Unit.
r0721
CU Ingressi digitali, valore attuale morsetti
Indica il valore attuale sui morsetti degli ingressi digitali della CU. Questo parametro rappresenta il valore
attuale non influenzato dalla modalità di simulazione degli ingressi digitali.
r0722
CO/BO: CU Ingressi digitali, stato
Indica lo stato degli ingressi digitali della CU. Questo parametro rappresenta lo stato degli ingressi digitali
nella modalità di simulazione degli ingressi digitali.
r0747
CU Uscite digitali, stato
Indica lo stato delle uscite digitali della CU. Questo parametro rappresenta lo stato degli ingressi digitali nella
modalità di simulazione degli ingressi digitali.
r2054
Stato PROFIBUS
Indica lo stato dell'interfaccia Profibus
r8937
PN Diagnostica
Visualizzazione per la diagnostica dello stato dei collegamenti ciclici PROFINET.
r9976[0..7]
Fattore di utilizzo sistema
Indica il carico di sistema.
I singoli valori (carico di calcolo e carico ciclico) vengono misurati per periodi di tempo brevi. Dalle misure si
ottengono i valori minimo, massimo e medio, che sono poi visualizzati negli indici corrispondenti. Inoltre
viene visualizzato il grado di utilizzo della memoria dati e programmi.
VECTOR: Parametri di diagnostica importanti (per i dettagli vedere il Manuale delle liste)
Parametri
Nome
Descrizione
r0002
Segnalazione di funzionamento azionamento
Il valore fornisce informazioni sullo stato operativo attuale nonché sulle condizioni necessarie per
raggiungere il successivo stato.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
459
Diagnostica / Anomalie e avvisi
10.2 Diagnostica
Parametri
Nome
Descrizione
r0020
Valore di riferimento del numero di giri livellato
Indica il valore di riferimento di velocità/giri attuale livellato all'ingresso del regolatore del numero di
giri/velocità o della curva caratteristica U/f (dopo l'interpolatore).
r0021
CO: Valore attuale del numero di giri livellato
Indica il valore di velocità/giri attuale livellato del motore.
r0024
CO: Frequenza di uscita livellata
Indica il valore di frequenza del convertitore livellato.
r0026
CO: Tensione del circuito intermedio livellata
Indica il valore attuale livellato del circuito intermedio.
r0027
CO: Valore attuale di corrente livellato
Indica il valore attuale di corrente livellato.
r0031
Valore attuale della coppia livellato
Indica il valore attuale livellato della coppia.
r0034
CO: Carico massimo motore
Visualizzazione del carico massimo del motore a partire dal modello termico del motore I2t.
r0035
CO: Temperatura motore
Se r0035 è diverso da -200.0 °C, vale quanto segue:
•
Questa indicazione di temperatura è valida.
•
Un sensore KTY è collegato.
• In caso di motore asincrono, il modello di motore termico è attivato (p0600 = 0 o p0601 = 0).
Se r0035 è uguale a -200.0 °C, vale quanto segue:
•
Questa indicazione di temperatura non è valida (errore del sensore di temperatura).
• Un sensore PTC è collegato.
In caso di motore sincrono, il modello di motore termico è attivato (p0600 = 0 o p0601 = 0).
r0037
CO: Parte di potenza, temperature
Indica le temperature misurate nella parte di potenza.
r0046
CO/BO: Abilitazioni mancanti
Visualizzazione di abilitazioni mancanti che impediscono la messa in servizio della regolazione
dell'azionamento.
r0049
Set di dati motore/set di dati encoder attivo (MDS, EDS)
Visualizzazione del set di dati del motore (MDS) e del set di dati dell'encoder (EDS) attivi.
r0050
CO/BO: Set di dati di comando CDS attivo
Indica il set di dati di comando attivo (CDS).
r0051
CO/BO: Set di dati dell'azionamento DDS attivo
Visualizzazione del set di dati dell'azionamento attivo (DDS).
r0056
CO/BO: Parola di stato regolazione
Visualizzazione della parola di stato della regolazione.
r0063
CO: Valore attuale del numero di giri
Visualizzazione del valore attuale corrente del numero di giri della regolazione del numero di giri e del
controllo U/f.
r0066
CO: Frequenza di uscita
Convertitori da incasso
460
Istruzioni operative, 04/2014, A5E00386872A
Diagnostica / Anomalie e avvisi
10.2 Diagnostica
Parametri
Nome
Descrizione
Visualizzazione della frequenza di uscita del Motor Module.
r0070
CO: Valore attuale tensione del circuito intermedio
Visualizzazione del valore attuale misurato della tensione del circuito intermedio.
r0072
CO: Tensione di uscita
Visualizzazione della tensione di uscita attuale della parte di potenza (Motor Module).
r0082
CO: Valore attuale potenza attiva
Visualizzazione della potenza attiva momentanea.
r0206
Parte di potenza, potenza nominale
Visualizzazione della potenza nominale della parte di potenza per diversi cicli.
r0207
Parte di potenza, corrente nominale
Visualizzazione della corrente nominale della parte di potenza per diversi cicli.
r0208
Parte di potenza, tensione nominale di rete
Visualizzazione della tensione nominale di rete della parte di potenza.
r0209
Parte di potenza, corrente massima
Visualizzazione della corrente di uscita massima della parte di potenza.
TM31: Parametri di diagnostica importanti (per i dettagli vedere il Manuale delle liste)
Parametri
Nome
Descrizione
r0002
TM31 Segnalazione di funzionamento
Segnalazione di funzionamento per il Terminal Module 31 (TM31).
r4021
TM31 Ingressi digitali, valore attuale morsetti
Visualizzazione del valore attuale sui morsetti degli ingressi digitali del TM31. Questo parametro rappresenta
il valore attuale non influenzato dalla modalità di simulazione degli ingressi digitali.
r4022
CO/BO: TM31 Ingressi digitali, stato
Indica lo stato degli ingressi digitali del TM31. Questo parametro rappresenta lo stato degli ingressi digitali
nella modalità di simulazione degli ingressi digitali.
r4047
TM31 Uscite digitali, stato
Visualizzazione dello stato delle uscite digitali del TM31. Viene tenuta in considerazione un'inversione
tramite p4048.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
461
Diagnostica / Anomalie e avvisi
10.2 Diagnostica
10.2.3
Visualizzazione ed eliminazione degli errori
L'apparecchio dispone di una molteplicità di funzioni di protezione che intervengono in caso
di errore dell'azionamento preservandolo da eventuali danni (anomalie e avvisi).
Visualizzazione di anomalie / avvisi
L'azionamento visualizza una condizione di errore segnalando la relativa anomalia e/o il
relativo avviso tramite il pannello operatore AOP30. Le anomalie vengono segnalate
mediante il LED rosso di "FAULT" e la pagina delle anomalie viene richiamata sul display.
Premendo il tasto della guida F1 si ottengono informazioni sulla causa e sul possibile
rimedio. Con il tasto tacitazione F5 è possibile tacitare un’anomalia memorizzata.
Gli avvisi presenti vengono indicati dal lampeggio del LED giallo "ALARM", inoltre nella riga
di stato del pannello operatore viene riportata un'indicazione relativa alla causa.
Ogni anomalia o avviso viene memorizzata/o nel relativo buffer con l'indicazione dell'ora di
comparsa. L'indicazione dell'ora si riferisce al tempo di sistema in millisecondi (r0969).
Sull'AOP30 è possibile memorizzare gli errori con la data e l'ora, se è stata selezionata
l'opzione "Imposta data/ora - Sincronizzazione AOP -> Drive".
Cos'è un’anomalia?
Un’anomalia è un messaggio dell'azionamento relativo a un errore o a una condizione
anomala (non voluta). La causa potrebbe derivare da un’anomalia interna dell'azionamento
ma anche esterna, come ad esempio dalla sorveglianza di temperatura dell'avvolgimento del
motore asincrono. Le anomalie vengono visualizzate sul display e possono essere segnalate
via PROFIdrive a un sistema di controllo sovraordinato. Inoltre, un'uscita relè è già
preassegnata nello stato di fornitura con la segnalazione "Convertitore guasto". Dopo
l'eliminazione della causa dell’anomalia, è necessario tacitare il relativo messaggio.
Cos'è un avviso?
Un avviso è una reazione dell'azionamento al riconoscimento di una condizione di errore che
non provoca la disinserzione dell'azionamento e non deve essere tacitata. Gli avvisi sono
perciò "autotacitanti", ovvero vengono cancellati non appena la causa sparisce.
Convertitori da incasso
462
Istruzioni operative, 04/2014, A5E00386872A
Diagnostica / Anomalie e avvisi
10.3 Panoramica delle anomalie e degli avvisi
10.3
Panoramica delle anomalie e degli avvisi
L'azionamento rileva una condizione di errore segnalando un'anomalia e/o un avviso
corrispondente. I possibili avvisi o anomalie sono raggruppati in un'apposita lista. In questa
lista sono riportati i seguenti criteri:
● Numero di anomalia/avviso dell'errore
● Reazione standard dell'azionamento
● Descrizione della possibile causa dell'anomalia/avviso
● Descrizione della possibile procedura per l'eliminazione dell'errore
● Tacitazione standard dell'anomalia dopo l'eliminazione dell'errore
Nota
Lista delle anomalie e degli avvisi
La lista di anomalie e degli avvisi è contenuta nel CD fornito con il prodotto.
Qui sono descritte anche le possibili reazioni agli errori (OFF1, OFF2,...).
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
463
Diagnostica / Anomalie e avvisi
10.3 Panoramica delle anomalie e degli avvisi
Convertitori da incasso
464
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.1
11
Contenuto del capitolo
Questo capitolo descrive:
● Attività di manutenzione e di riparazione che devono essere eseguite a intervalli regolari
per garantire la disponibilità degli apparecchi
● Sostituzione di componenti dell'apparecchio in caso di intervento di service
● Forming dei condensatori del circuito intermedio
● L'aggiornamento del firmware dell'apparecchio
AVVERTENZA
Pericolo di morte per inosservanza delle avvertenze di sicurezza di base e dei rischi residui
L'inosservanza delle avvertenze di sicurezza di base e dei rischi residui descritti nel
capitolo 1 può avere come conseguenza incidenti che possono comportare lesioni gravi o
la morte.
• Rispettare le avvertenze di sicurezza di base.
• Nella valutazione dei rischi occorre tenere conto dei rischi residui.
PERICOLO
Pericolo di morte per folgorazione a causa di carica residua dei condensatori del circuito
intermedio
Sui condensatori del circuito intermedio può essere presente una tensione pericolosa fino a
5 minuti dopo la disinserzione dell'alimentazione.
Il contatto con elementi sotto tensione provoca la morte o gravi lesioni.
• Aprire l'apparecchio solo dopo che sono trascorsi 5 minuti.
• Misurare la tensione prima dell'inizio dei lavori sui morsetti del circuito intermedio DCP e
DCN.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
465
Manutenzione e riparazione
11.2 Manutenzione
11.2
Manutenzione
Poiché l'apparecchio è composto in gran parte da componenti elettronici, tranne che per il
ventilatore / i ventilatori, raramente gli altri componenti sono soggetti ad usura o necessitano
di manutenzione o riparazione. La manutenzione serve a mantenere la condizione ottimale
dell'apparecchio. Prevede interventi regolari di pulizia e di sostituzione di componenti usurati.
Generalmente devono essere osservati i seguenti punti.
11.2.1
Pulizia
Depositi di polvere
I depositi di polvere all'interno dell'apparecchio da incasso devono essere rimossi ad
intervalli regolari, comunque almeno una volta all'anno, da personale qualificato ed
osservando le prescrizioni di sicurezza. La pulizia deve avvenire con pennello ed
aspirapolvere, mentre per le parti non accessibili occorre utilizzare aria compressa asciutta
(max. 1 bar).
Ventilazione
Se gli apparecchi vengono montati in armadio, è necessario che le aperture di ventilazione
dell’armadio stesso vengano sempre lasciate libere. Deve essere garantita la perfetta
funzionalità del ventilatore.
Cavi e morsetti a vite
Il fissaggio corretto dei cavi e dei morsetti a vite deve essere verificato regolarmente ed
eventualmente riserrato. Devono essere ricercati difetti del cablaggio. I pezzi di ricambio
guasti devono essere immediatamente sostituiti.
Nota
Intervalli di manutenzione
Gli intervalli di tempo nell'ambito dei quali devono essere eseguite le attività di
manutenzione, dipendono dalle condizioni di impiego e di funzionamento.
La Siemens offre la possibilità di stipulare un contratto di manutenzione. Per ulteriori
informazioni contattare la filiale o il punto vendita di zona.
Convertitori da incasso
466
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.3 Manutenzione preventiva
11.3
Manutenzione preventiva
11.3.1
Manutenzione preventiva
Fanno parte delle attività di riparazione quei provvedimenti atti a mantenere e ripristinare lo
stato richiesto dell'apparecchio.
Attrezzi necessari
Per eventuali interventi di sostituzione sono necessari i seguenti attrezzi:
● Chiave per dadi oppure chiave a tubo da 10
● Chiave per dadi oppure chiave a tubo da 13
● Chiave per dadi oppure chiave a tubo, apertura della chiave 16/17
● Chiave per dadi oppure chiave a tubo, apertura della chiave 18/19
● Chiave esagonale gr. 8
● Chiave dinamometrica calibrata
● Cacciavite gr. 1 / 2
● Cacciavite Torx T20 / T25 / T30
Si consiglia di utilizzare una cassetta di chiavi a tubo con due elementi di prolunga.
Coppie di serraggio per i collegamenti a vite
I contatti elettrici (connessioni del circuito intermedio, del motore e delle sbarre collettrici in
generale) e altre parti conduttive (collegamenti di terra, viti dei conduttori di protezione, viti in
acciaio) devono essere avvitati rispettando le seguenti coppie di serraggio.
Tabella 11- 1 Coppie di serraggio per i collegamenti a vite
Filettatura
Collegamenti di terra, viti dei
conduttori di protezione, viti in
acciaio
Viti in alluminio, plastica, sbarre
collettrici, capicorda
M3
1,3 Nm
0,8 Nm
M4
3 Nm
1,8 Nm
M5
6 Nm
3 Nm
M6
10 Nm
6 Nm
M8
25 Nm
13 Nm
M10
50 Nm
25 Nm
M12
88 Nm
50 Nm
M16
215 Nm
115 Nm
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
467
Manutenzione e riparazione
11.3 Manutenzione preventiva
Nota
Collegamenti a vite per le coperture di protezione
I collegamenti a vite per le coperture di protezione in Makrolon devono essere serrati solo a
2,5 Nm.
Convertitori da incasso
468
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.3 Manutenzione preventiva
11.3.2
Telaio di montaggio
Descrizione
Il telaio di montaggio è previsto per il montaggio e lo smontaggio del Powerblock.
Per agevolare il montaggio, il telaio viene collocato davanti al modulo e fissato a
quest'ultimo. Grazie alle sbarre telescopiche, il telaio può essere regolato all'altezza di
montaggio opportuna per i Powerblock. Una volta rimossi i collegamenti meccanici ed
elettrici, è possibile estrarre il Powerblock dal modulo. In questo modo il Powerblock viene
guidato e supportato dalle guide del telaio di montaggio.
Figura 11-1
Telaio di montaggio
N. di ordinazione
Il numero di ordinazione del telaio di montaggio è 6SL3766-1FA00-0AA0.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
469
Manutenzione e riparazione
11.3 Manutenzione preventiva
11.3.3
Trasporto dei Powerblock tramite i fori per il sollevamento
Occhielli per il sollevamento tramite gru
I Powerblock sono provvisti di occhielli che permettono di sollevarli con un apposito attrezzo
durante la sostituzione.
La posizione degli occhielli per il sollevamento è indicata dalle frecce nelle illustrazioni che
seguono.
ATTENZIONE
Danni all'apparecchio dovuti a un trasporto improprio
Un trasporto improprio può determinare sollecitazioni meccaniche alla custodia del
Powerblock o alle sbarre collettrici, con danni conseguenti all'apparecchio.
• Per il trasporto dei Powerblock utilizzare un sistema di sollevamento che consenta alla
fune e/o alle catene di scorrere verticalmente.
• Non utilizzare le sbarre collettrici per afferrare i Powerblock o per fissare un attrezzo di
sollevamento.
Figura 11-2
Fori di sollevamento nei Powerblock della grandezza costruttiva FX, GX
Convertitori da incasso
470
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.3 Manutenzione preventiva
Figura 11-3
Fori di sollevamento nei Powerblock della grandezza costruttiva HX, JX
Nota
Occhielli di sollevamento nel Powerblock di grandezza costruttiva HX, JX
Nei Powerblock della grandezza costruttiva HX, JX il foro anteriore si trova dietro la sbarra di
corrente.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
471
Manutenzione e riparazione
11.4 Sostituzione di componenti
11.4
Sostituzione di componenti
AVVERTENZA
Pericolo di morte a causa di trasporto o montaggio improprio di apparecchi e componenti
Il trasporto o il montaggio improprio degli apparecchi può provocare lesioni fisiche gravi o
addirittura mortali e notevoli danni materiali.
• Trasportare, montare e smontare gli apparecchi e i componenti solo se si è
adeguatamente qualificati.
• Tenere presente che il peso maggiore degli apparecchi e dei componenti è concentrato
sul lato anteriore, adottare pertanto le misure precauzionali opportune.
I rispettivi pesi dei Powerblock sono indicati nel relativo paragrafo.
Convertitori da incasso
472
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.4 Sostituzione di componenti
11.4.1
Sostituzione del Control Interface Module, grandezza costruttiva FX
Sostituzione del Control Interface Module
Figura 11-4
Sostituzione del Control Interface Module, grandezza costruttiva FX
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
473
Manutenzione e riparazione
11.4 Sostituzione di componenti
Operazioni preliminari
● Scollegare dalla tensione l'apparecchio da incasso
● Consentire il libero accesso
● Rimuovere la copertura di protezione
Operazioni di smontaggio
La numerazione delle operazioni di smontaggio corrisponde a quella riportata nella figura.
1. Scollegare i connettori dei conduttori in fibra ottica e dei cavi di segnale (5 connettori).
2. Rimuovere i cavi DRIVE-CLiQ e i collegamenti su -X41, -X42, -X46 (6 connettori).
I cavi DRIVE-CLiQ devono essere contrassegnati in modo da permetterne il corretto
rimontaggio in una fase successiva.
3. Togliere le viti di fissaggio della IPD Card (2 viti) e rimuovere la IPD Card stessa dal
connettore -X45 sul Control Interface Module.
4. Rimuovere le viti di fissaggio del Control Interface Module (2 viti).
Nell'estrazione del Control Interface Module occorre rimuovere in successione altri 5
connettori (2 in alto, 3 in basso).
ATTENZIONE
Danni all'apparecchio dovuti a cavi di segnale danneggiati durante lo smontaggio
Durante l'estrazione del Control Interface Module si rischia di danneggiare i cavi di segnale
e di mettere fuori servizio l'apparecchiatura.
• Durante l'estrazione del Control Interface Module, fare attenzione a non danneggiare i
cavi di segnale.
Operazioni di montaggio
Per il montaggio eseguire in senso inverso le stesse operazioni dello smontaggio.
Coppia di serraggio delle viti di fissaggio del Control Interface Module (M6 x 16, posizione
④): 6 Nm.
Nota
Indicazioni per il montaggio
Rispettare le coppie di serraggio riportate nella tabella "Coppie di serraggio per parti
conduttive".
Inserire con cautela i connettori, quindi verificare che i collegamenti siano saldi.
I connettori dei cavi in fibra ottica vanno rimontati nella loro posizione originaria. Le scritte
(U11, U21, U31) indicano l'assegnazione corretta dei cavi in fibra ottica e delle rispettive
prese.
Convertitori da incasso
474
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.4 Sostituzione di componenti
11.4.2
Sostituzione del Control Interface Module, grandezza costruttiva GX
Sostituzione del Control Interface Module
Figura 11-5
Sostituzione del Control Interface Module, grandezza costruttiva GX
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
475
Manutenzione e riparazione
11.4 Sostituzione di componenti
Operazioni preliminari
● Scollegare dalla tensione l'apparecchio da incasso
● Consentire il libero accesso
● Rimuovere la copertura di protezione
Operazioni di smontaggio
La numerazione delle operazioni di smontaggio corrisponde a quella riportata nella figura.
1. Scollegare i connettori dei conduttori in fibra ottica e dei cavi di segnale (5 connettori).
2. Rimuovere i cavi DRIVE-CLiQ e i collegamenti su -X41, -X42, -X46 (6 connettori).
I cavi DRIVE-CLiQ devono essere contrassegnati in modo da permetterne il corretto
rimontaggio in una fase successiva.
3. Togliere le viti di fissaggio della IPD Card (2 viti) e rimuovere la IPD Card stessa dal
connettore -X45 sul Control Interface Module.
4. Rimuovere le viti di fissaggio del Control Interface Module (2 viti).
Nell'estrazione del Control Interface Module occorre rimuovere in successione altri 5
connettori (2 in alto, 3 in basso).
ATTENZIONE
Danni all'apparecchio dovuti a cavi di segnale danneggiati durante lo smontaggio
Durante l'estrazione del Control Interface Module si rischia di danneggiare i cavi di segnale
e di mettere fuori servizio l'apparecchiatura.
• Durante l'estrazione del Control Interface Module, fare attenzione a non danneggiare i
cavi di segnale.
Operazioni di montaggio
Per il montaggio eseguire in senso inverso le stesse operazioni dello smontaggio.
Coppia di serraggio delle viti di fissaggio del Control Interface Module (M6 x 16, posizione
④): 6 Nm.
Nota
Indicazioni per il montaggio
Rispettare le coppie di serraggio riportate nella tabella "Coppie di serraggio per parti
conduttive".
Inserire con cautela i connettori, quindi verificare che i collegamenti siano saldi.
I connettori dei cavi in fibra ottica vanno rimontati nella loro posizione originaria. Le scritte
(U11, U21, U31) indicano l'assegnazione corretta dei cavi in fibra ottica e delle rispettive
prese.
Convertitori da incasso
476
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.4 Sostituzione di componenti
11.4.3
Sostituzione del Control Interface Module, grandezza costruttiva HX
Sostituzione del Control Interface Module
Figura 11-6
Sostituzione del Control Interface Module, grandezza costruttiva HX
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
477
Manutenzione e riparazione
11.4 Sostituzione di componenti
Operazioni preliminari
● Scollegare dalla tensione l'apparecchio da incasso
● Consentire il libero accesso
● Rimuovere la copertura di protezione
Operazioni di smontaggio
La numerazione delle operazioni di smontaggio corrisponde a quella riportata nella figura.
1. Scollegare i connettori dei conduttori in fibra ottica e dei cavi di segnale (5 connettori).
2. Rimuovere i cavi DRIVE-CLiQ e i collegamenti su -X41, -X42, -X46 (6 connettori).
I cavi DRIVE-CLiQ devono essere contrassegnati in modo da permetterne il corretto
rimontaggio in una fase successiva.
3. Togliere le viti di fissaggio della IPD Card (2 viti) e rimuovere la IPD Card stessa dal
connettore -X45 sul Control Interface Module.
4. Rimuovere le viti di fissaggio del Control Interface Module (2 viti).
Nell'estrazione del Control Interface Module occorre rimuovere in successione altri 5
connettori (2 in alto, 3 in basso).
ATTENZIONE
Danni all'apparecchio dovuti a cavi di segnale danneggiati durante lo smontaggio
Durante l'estrazione del Control Interface Module si rischia di danneggiare i cavi di segnale
e di mettere fuori servizio l'apparecchiatura.
• Durante l'estrazione del Control Interface Module, fare attenzione a non danneggiare i
cavi di segnale.
Operazioni di montaggio
Per il montaggio eseguire in senso inverso le stesse operazioni dello smontaggio.
Coppia di serraggio delle viti di fissaggio del Control Interface Module (M6 x 16, posizione
④): 6 Nm.
Nota
Indicazioni per il montaggio
Rispettare le coppie di serraggio riportate nella tabella "Coppie di serraggio per parti
conduttive".
Inserire con cautela i connettori, quindi verificare che i collegamenti siano saldi.
I connettori dei cavi in fibra ottica vanno rimontati nella loro posizione originaria. Le scritte
(U11, U21, U31) indicano l'assegnazione corretta dei cavi in fibra ottica e delle rispettive
prese.
Convertitori da incasso
478
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.4 Sostituzione di componenti
11.4.4
Sostituzione del Control Interface Module, grandezza costruttiva JX
Sostituzione del Control Interface Module
Figura 11-7
Sostituzione del Control Interface Module, grandezza costruttiva JX
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
479
Manutenzione e riparazione
11.4 Sostituzione di componenti
Operazioni preliminari
● Scollegare dalla tensione l'apparecchio da incasso
● Consentire il libero accesso
● Rimuovere la copertura di protezione
Operazioni di smontaggio
La numerazione delle operazioni di smontaggio corrisponde a quella riportata nella figura.
1. Scollegare i connettori dei conduttori in fibra ottica e dei cavi di segnale (5 connettori).
2. Rimuovere i cavi DRIVE-CLiQ e i collegamenti su -X41, -X42, -X46 (6 connettori).
I cavi DRIVE-CLiQ devono essere contrassegnati in modo da permetterne il corretto
rimontaggio in una fase successiva.
3. Togliere le viti di fissaggio della IPD Card (2 viti) e rimuovere la IPD Card stessa dal
connettore -X45 sul Control Interface Module.
4. Rimuovere le viti di fissaggio del Control Interface Module (2 viti).
Nell'estrazione del Control Interface Module occorre rimuovere in successione altri 5
connettori (2 in alto, 3 in basso).
ATTENZIONE
Danni all'apparecchio dovuti a cavi di segnale danneggiati durante lo smontaggio
Durante l'estrazione del Control Interface Module si rischia di danneggiare i cavi di segnale
e di mettere fuori servizio l'apparecchiatura.
• Durante l'estrazione del Control Interface Module, fare attenzione a non danneggiare i
cavi di segnale.
Operazioni di montaggio
Per il montaggio eseguire in senso inverso le stesse operazioni dello smontaggio.
Coppia di serraggio delle viti di fissaggio del Control Interface Module (M6 x 16, posizione
④): 6 Nm.
Nota
Indicazioni per il montaggio
Rispettare le coppie di serraggio riportate nella tabella "Coppie di serraggio per parti
conduttive".
Inserire con cautela i connettori, quindi verificare che i collegamenti siano saldi.
I connettori dei cavi in fibra ottica vanno rimontati nella loro posizione originaria. Le scritte
(U11, U21, U31) indicano l'assegnazione corretta dei cavi in fibra ottica e delle rispettive
prese.
Convertitori da incasso
480
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.4 Sostituzione di componenti
11.4.5
Sostituzione del Powerblock, grandezza costruttiva FX
Sostituzione del Powerblock
Figura 11-8
Sostituzione del Powerblock, grandezza costruttiva FX
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
481
Manutenzione e riparazione
11.4 Sostituzione di componenti
Operazioni preliminari
● Scollegare dalla tensione l'apparecchio da incasso
● Liberare l'accesso al Powerblock
● Rimuovere la copertura di protezione
● Smontare il Control Interface Module (vedere la sezione corrispondente)
Operazioni di smontaggio
La numerazione delle operazioni di smontaggio corrisponde a quella riportata nella figura.
1. Svitare il collegamento con l'uscita del motore (3 viti).
2. Svitare il collegamento con l'alimentazione di rete (3 viti).
3. Rimuovere le viti di fissaggio superiori (2 viti).
4. Rimuovere le viti di fissaggio inferiori (2 viti).
5. Scollegare il connettore per la termocoppia.
6. Svitare le 2 viti di fissaggio del ventilatore e bloccare il telaio di montaggio del Powerblock
in questa posizione.
A questo punto è possibile estrarre il Powerblock.
Nota
Il Powerblock pesa circa 70 kg!
ATTENZIONE
Danni all'apparecchio dovuti a cavi di segnale danneggiati durante lo smontaggio
Durante l'estrazione del Powerblock, è possibile che vengano danneggiati i cavi di segnale,
con danni conseguenti all'apparecchio.
• Durante l'estrazione del Powerblock fare attenzione a non danneggiare i cavi di segnale.
Operazioni di montaggio
Per il montaggio eseguire in senso inverso le stesse operazioni dello smontaggio.
Nota
Indicazioni per il montaggio
Rispettare le coppie di serraggio riportate nella tabella "Coppie di serraggio per parti
conduttive".
Inserire con cautela i connettori, quindi verificare che i collegamenti siano saldi.
Convertitori da incasso
482
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.4 Sostituzione di componenti
Nota
Staffa di collegamento del condensatore antidisturbi
Sul Powerblock di ricambio è montata la staffa di collegamento dal condensatore antidisturbi
ed è anche applicata una targhetta di avviso gialla.
A questo proposito osservare le avvertenze contenute nel capitolo "Rimozione della staffa di
collegamento dal condensatore antidisturbi per il funzionamento in rete non collegata a terra
(rete IT)".
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
483
Manutenzione e riparazione
11.4 Sostituzione di componenti
11.4.6
Sostituzione del Powerblock, grandezza costruttiva GX
Sostituzione del Powerblock
Figura 11-9
Sostituzione del Powerblock, grandezza costruttiva GX
Convertitori da incasso
484
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.4 Sostituzione di componenti
Operazioni preliminari
● Scollegare dalla tensione l'apparecchio da incasso
● Liberare l'accesso al Powerblock
● Rimuovere la copertura di protezione
● Smontare il Control Interface Module (vedere la sezione corrispondente)
Operazioni di smontaggio
La numerazione delle operazioni di smontaggio corrisponde a quella riportata nella figura.
1. Svitare il collegamento con l'uscita del motore (3 viti).
2. Svitare il collegamento con l'alimentazione di rete (3 viti).
3. Rimuovere le viti di fissaggio superiori (2 viti).
4. Rimuovere le viti di fissaggio inferiori (2 viti).
5. Scollegare il connettore per la termocoppia.
6. Svitare le 2 viti di fissaggio del ventilatore e bloccare il telaio di montaggio del Powerblock
in questa posizione.
A questo punto è possibile estrarre il Powerblock.
Nota
Il Powerblock pesa circa 102 kg!
ATTENZIONE
Danni all'apparecchio dovuti a cavi di segnale danneggiati durante lo smontaggio
Durante l'estrazione del Powerblock, è possibile che vengano danneggiati i cavi di segnale,
con danni conseguenti all'apparecchio.
• Durante l'estrazione del Powerblock fare attenzione a non danneggiare i cavi di segnale.
Operazioni di montaggio
Per il montaggio eseguire in senso inverso le stesse operazioni dello smontaggio.
Nota
Indicazioni per il montaggio
Rispettare le coppie di serraggio riportate nella tabella "Coppie di serraggio per parti
conduttive".
Inserire con cautela i connettori, quindi verificare che i collegamenti siano saldi.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
485
Manutenzione e riparazione
11.4 Sostituzione di componenti
Nota
Staffa di collegamento del condensatore antidisturbi
Sul Powerblock di ricambio è montata la staffa di collegamento dal condensatore antidisturbi
ed è anche applicata una targhetta di avviso gialla.
A questo proposito osservare le avvertenze contenute nel capitolo "Rimozione della staffa di
collegamento dal condensatore antidisturbi per il funzionamento in rete non collegata a terra
(rete IT)".
Convertitori da incasso
486
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.4 Sostituzione di componenti
11.4.7
Sostituzione del Powerblock, grandezza costruttiva HX
Sostituzione del Powerblock di sinistra
Figura 11-10 Sostituzione del Powerblock di sinistra, grandezza costruttiva HX
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
487
Manutenzione e riparazione
11.4 Sostituzione di componenti
Operazioni preliminari
● Scollegare dalla tensione l'apparecchio da incasso
● Liberare l'accesso al Powerblock
● Rimuovere la copertura di protezione
Operazioni di smontaggio
La numerazione delle operazioni di smontaggio corrisponde a quella riportata nella figura.
1. Smontare la sbarra collettrice (6 viti)
2. Svitare il collegamento con il circuito intermedio (8 dadi)
3. Rimuovere la vite di fissaggio superiore (1 vite)
4. Rimuovere le viti di fissaggio inferiori (2 viti)
5. Scollegare i connettori dei conduttori in fibra ottica e dei cavi di segnale (3 connettori)
6. Rimuovere il collegamento del trasformatore di corrente e il relativo collegamento PE (1
connettore)
7. Rimuovere il rilevamento del circuito di misura (1 dado)
8. Rimuovere le connessioni di potenza (6 viti)
9. Svitare 2 viti di fissaggio del ventilatore e fissare in questa posizione l'attrezzo per lo
smontaggio del Powerblock.
A questo punto è possibile estrarre il Powerblock.
Nota
Il Powerblock pesa circa 94 kg!
ATTENZIONE
Danni all'apparecchio dovuti a cavi di segnale danneggiati durante lo smontaggio
Durante l'estrazione del Powerblock, è possibile che vengano danneggiati i cavi di segnale,
con danni conseguenti all'apparecchio.
• Durante l'estrazione del Powerblock fare attenzione a non danneggiare i cavi di segnale.
Convertitori da incasso
488
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.4 Sostituzione di componenti
Operazioni di montaggio
Per il montaggio eseguire in senso inverso le stesse operazioni dello smontaggio.
Nota
Indicazioni per il montaggio
Rispettare le coppie di serraggio riportate nella tabella "Coppie di serraggio per parti
conduttive".
Inserire con cautela i connettori, quindi verificare che i collegamenti siano saldi.
Nota
Staffa di collegamento del condensatore antidisturbi
Sul Powerblock di ricambio è montata la staffa di collegamento dal condensatore antidisturbi
ed è anche applicata una targhetta di avviso gialla.
A questo proposito osservare le avvertenze contenute nel capitolo "Rimozione della staffa di
collegamento dal condensatore antidisturbi per il funzionamento in rete non collegata a terra
(rete IT)".
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
489
Manutenzione e riparazione
11.4 Sostituzione di componenti
Sostituzione del Powerblock di destra
Figura 11-11 Sostituzione del Powerblock di destra, grandezza costruttiva HX
Convertitori da incasso
490
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.4 Sostituzione di componenti
Operazioni preliminari
● Scollegare dalla tensione l'apparecchio da incasso
● Liberare l'accesso al Powerblock
● Rimuovere la copertura di protezione
Operazioni di smontaggio
La numerazione delle operazioni di smontaggio corrisponde a quella riportata nella figura.
1. Smontare le sbarre collettrici (12 viti)
2. Svitare il collegamento con il circuito intermedio (8 dadi)
3. Rimuovere la vite di fissaggio superiore (1 vite)
4. Rimuovere le viti di fissaggio inferiori (2 viti)
5. Scollegare i connettori dei conduttori in fibra ottica e dei cavi di segnale (3 connettori)
6. Rimuovere il collegamento del trasformatore di corrente e il relativo collegamento PE (2
connettore)
7. Svitare 2 viti di fissaggio del ventilatore e fissare in questa posizione l'attrezzo per lo
smontaggio del Powerblock.
A questo punto è possibile estrarre il Powerblock.
Nota
Il Powerblock pesa circa 88 kg!
ATTENZIONE
Danni all'apparecchio dovuti a cavi di segnale danneggiati durante lo smontaggio
Durante l'estrazione del Powerblock, è possibile che vengano danneggiati i cavi di segnale,
con danni conseguenti all'apparecchio.
• Durante l'estrazione del Powerblock fare attenzione a non danneggiare i cavi di segnale.
Operazioni di montaggio
Per il montaggio eseguire in senso inverso le stesse operazioni dello smontaggio.
Nota
Indicazioni per il montaggio
Rispettare le coppie di serraggio riportate nella tabella "Coppie di serraggio per parti
conduttive".
Inserire con cautela i connettori, quindi verificare che i collegamenti siano saldi.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
491
Manutenzione e riparazione
11.4 Sostituzione di componenti
11.4.8
Sostituzione del Powerblock, grandezza costruttiva JX
Sostituzione del Powerblock di sinistra
Figura 11-12 Sostituzione del Powerblock, grandezza costruttiva JX, Powerblock di sinistra
Convertitori da incasso
492
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.4 Sostituzione di componenti
Operazioni preliminari
● Scollegare dalla tensione l'apparecchio da incasso
● Liberare l'accesso al Powerblock
● Rimuovere la copertura di protezione
Operazioni di smontaggio
La numerazione delle operazioni di smontaggio corrisponde a quella riportata nella figura.
1. Svitare il collegamento con il circuito intermedio (8 dadi)
2. Rimuovere la vite di fissaggio superiore (1 vite)
3. Rimuovere le viti di fissaggio inferiori (2 viti)
4. Scollegare i connettori dei conduttori in fibra ottica e dei cavi di segnale (2 connettori)
5. Svitare i collegamenti con l'alimentazione di rete (6 viti)
6. Svitare 2 viti di fissaggio del ventilatore e fissare in questa posizione l'attrezzo per lo
smontaggio del Powerblock.
A questo punto è possibile estrarre il Powerblock.
Nota
Il Powerblock pesa circa 102 kg!
ATTENZIONE
Danni all'apparecchio dovuti a cavi di segnale danneggiati durante lo smontaggio
Durante l'estrazione del Powerblock, è possibile che vengano danneggiati i cavi di segnale,
con danni conseguenti all'apparecchio.
• Durante l'estrazione del Powerblock fare attenzione a non danneggiare i cavi di segnale.
Operazioni di montaggio
Per il montaggio eseguire in senso inverso le stesse operazioni dello smontaggio.
Nota
Indicazioni per il montaggio
Rispettare le coppie di serraggio riportate nella tabella "Coppie di serraggio per parti
conduttive".
Inserire con cautela i connettori, quindi verificare che i collegamenti siano saldi.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
493
Manutenzione e riparazione
11.4 Sostituzione di componenti
Nota
Staffa di collegamento del condensatore antidisturbi
Sul Powerblock di ricambio è montata la staffa di collegamento dal condensatore antidisturbi
ed è anche applicata una targhetta di avviso gialla.
A questo proposito osservare le avvertenze contenute nel capitolo "Rimozione della staffa di
collegamento dal condensatore antidisturbi per il funzionamento in rete non collegata a terra
(rete IT)".
Convertitori da incasso
494
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.4 Sostituzione di componenti
Sostituzione del Powerblock di destra
Figura 11-13 Sostituzione del Powerblock di destra, grandezza costruttiva JX
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
495
Manutenzione e riparazione
11.4 Sostituzione di componenti
Operazioni preliminari
● Scollegare dalla tensione l'apparecchio da incasso
● Liberare l'accesso al Powerblock
● Rimuovere la copertura di protezione
Operazioni di smontaggio
La numerazione delle operazioni di smontaggio corrisponde a quella riportata nella figura.
1. Smontare la sbarra collettrice (8 viti)
2. Svitare il collegamento con il circuito intermedio (8 dadi)
3. Rimuovere la vite di fissaggio superiore (1 vite)
4. Rimuovere le viti di fissaggio inferiori (2 viti)
5. Scollegare i connettori dei conduttori in fibra ottica e dei cavi di segnale (2 connettori)
6. Rimuovere il collegamento del trasformatore di corrente e il relativo collegamento PE (1
connettore)
7. Svitare 2 viti di fissaggio del ventilatore e fissare in questa posizione l'attrezzo per lo
smontaggio del Powerblock.
A questo punto è possibile estrarre il Powerblock.
Nota
Il Powerblock pesa circa 90 kg!
ATTENZIONE
Danni all'apparecchio dovuti a cavi di segnale danneggiati durante lo smontaggio
Durante l'estrazione del Powerblock, è possibile che vengano danneggiati i cavi di segnale,
con danni conseguenti all'apparecchio.
• Durante l'estrazione del Powerblock fare attenzione a non danneggiare i cavi di segnale.
Operazioni di montaggio
Per il montaggio eseguire in senso inverso le stesse operazioni dello smontaggio.
Nota
Indicazioni per il montaggio
Rispettare le coppie di serraggio riportate nella tabella "Coppie di serraggio per parti
conduttive".
Inserire con cautela i connettori, quindi verificare che i collegamenti siano saldi.
Convertitori da incasso
496
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.4 Sostituzione di componenti
11.4.9
Sostituzione del ventilatore, grandezza costruttiva FX
Sostituzione del ventilatore
Figura 11-14 Sostituzione del ventilatore, grandezza costruttiva FX
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
497
Manutenzione e riparazione
11.4 Sostituzione di componenti
Descrizione
La durata utile dei ventilatori è generalmente di 50.000 ore. La durata effettiva dipende
comunque da ulteriori grandezze, quali ad es. la temperatura ambiente e il grado di
protezione dell'armadio e in determinati casi può pertanto discostarsi da questo valore.
I ventilatori devono essere sostituiti nei tempi corretti per garantire la disponibilità
dell'apparecchio.
Operazioni preliminari
● Scollegare dalla tensione l'apparecchio da incasso
● Consentire il libero accesso
● Rimuovere la copertura di protezione
Operazioni di smontaggio
La numerazione delle operazioni di smontaggio corrisponde a quella riportata nella figura.
1. Rimuovere le viti di fissaggio del ventilatore (2 viti).
2. Scollegare le linee di alimentazione (1 x "L", 1 x "N")
A questo punto è possibile estrarre delicatamente il ventilatore.
ATTENZIONE
Danni all'apparecchio dovuti a cavi di segnale danneggiati durante lo smontaggio
Durante l'estrazione del ventilatore, è possibile che vengano danneggiati i cavi di segnale,
con danni conseguenti all'apparecchio.
• Durante l'estrazione del ventilatore fare attenzione a non danneggiare i cavi di segnale.
Operazioni di montaggio
Per il montaggio eseguire in senso inverso le stesse operazioni dello smontaggio.
Nota
Rispetto delle coppie di serraggio
Rispettare le coppie di serraggio riportate nella tabella "Coppie di serraggio per parti
conduttive".
Nota
Azzeramento del contatore delle ore di esercizio
Dopo la sostituzione del ventilatore si dovrebbe resettare il contatore delle ore di esercizio
del ventilatore impostando p0251 = 0.
Convertitori da incasso
498
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.4 Sostituzione di componenti
11.4.10
Sostituzione del ventilatore, grandezza costruttiva GX
Sostituzione del ventilatore
Figura 11-15 Sostituzione del ventilatore, grandezza costruttiva GX
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
499
Manutenzione e riparazione
11.4 Sostituzione di componenti
Descrizione
La durata utile dei ventilatori è generalmente di 50.000 ore. La durata effettiva dipende
comunque da ulteriori grandezze, quali ad es. la temperatura ambiente e il grado di
protezione dell'armadio e in determinati casi può pertanto discostarsi da questo valore.
I ventilatori devono essere sostituiti per tempo, per garantire la disponibilità dell'apparecchio.
Operazioni preliminari
● Scollegare dalla tensione l'apparecchio da incasso
● Consentire il libero accesso
● Rimuovere la copertura di protezione
Operazioni di smontaggio
La numerazione delle operazioni di smontaggio corrisponde a quella riportata nella figura.
1. Rimuovere le viti di fissaggio del ventilatore (3 viti)
2. Scollegare le linee di alimentazione (1 x "L", 1 x "N")
A questo punto è possibile estrarre delicatamente il ventilatore.
ATTENZIONE
Danni all'apparecchio dovuti a cavi di segnale danneggiati durante lo smontaggio
Durante l'estrazione del ventilatore, è possibile che vengano danneggiati i cavi di segnale,
con danni conseguenti all'apparecchio.
• Durante l'estrazione del ventilatore fare attenzione a non danneggiare i cavi di segnale.
Operazioni di montaggio
Per il montaggio eseguire in senso inverso le stesse operazioni dello smontaggio.
Nota
Rispetto delle coppie di serraggio
Rispettare le coppie di serraggio riportate nella tabella "Coppie di serraggio per parti
conduttive".
Nota
Azzeramento del contatore delle ore di esercizio
Dopo la sostituzione del ventilatore si dovrebbe resettare il contatore delle ore di esercizio
del ventilatore impostando p0251 = 0.
Convertitori da incasso
500
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.4 Sostituzione di componenti
11.4.11
Sostituzione del ventilatore, grandezza costruttiva HX
Sostituzione del ventilatore, Powerblock di sinistra
Figura 11-16 Sostituzione del ventilatore del Powerblock di sinistra, grandezza costruttiva HX
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
501
Manutenzione e riparazione
11.4 Sostituzione di componenti
Descrizione
La durata utile dei ventilatori è generalmente di 50.000 ore. La durata effettiva dipende
comunque da ulteriori grandezze, quali ad es. la temperatura ambiente e il grado di
protezione dell'armadio e in determinati casi può pertanto discostarsi da questo valore.
I ventilatori devono essere sostituiti per tempo, per garantire la disponibilità dell'apparecchio.
Operazioni preliminari
● Scollegare dalla tensione l'apparecchio da incasso
● Consentire il libero accesso
● Rimuovere la copertura di protezione
Operazioni di smontaggio
La numerazione delle operazioni di smontaggio corrisponde a quella riportata nella figura.
1. Rimuovere la barra di rame (6 viti).
2. Rimuovere le viti di fissaggio del ventilatore (3 viti)
3. Scollegare le linee di alimentazione (1 x "L", 1 x "N")
A questo punto è possibile estrarre delicatamente il ventilatore.
ATTENZIONE
Danni all'apparecchio dovuti a cavi di segnale danneggiati durante lo smontaggio
Durante l'estrazione del ventilatore, è possibile che vengano danneggiati i cavi di segnale,
con danni conseguenti all'apparecchio.
• Durante l'estrazione del ventilatore fare attenzione a non danneggiare i cavi di segnale.
Operazioni di montaggio
Per il montaggio eseguire in senso inverso le stesse operazioni dello smontaggio.
Nota
Rispetto delle coppie di serraggio
Rispettare le coppie di serraggio riportate nella tabella "Coppie di serraggio per parti
conduttive".
Nota
Azzeramento del contatore delle ore di esercizio
Dopo la sostituzione del ventilatore si dovrebbe resettare il contatore delle ore di esercizio
del ventilatore impostando p0251 = 0.
Convertitori da incasso
502
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.4 Sostituzione di componenti
Sostituzione del ventilatore, Powerblock di destra
Figura 11-17 Sostituzione del ventilatore del Powerblock di destra, grandezza costruttiva HX
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
503
Manutenzione e riparazione
11.4 Sostituzione di componenti
Descrizione
La durata utile dei ventilatori è generalmente di 50.000 ore. La durata effettiva dipende
comunque da ulteriori grandezze, quali ad es. la temperatura ambiente e il grado di
protezione dell'armadio e in determinati casi può pertanto discostarsi da questo valore.
I ventilatori devono essere sostituiti per tempo, per garantire la disponibilità dell'apparecchio.
Operazioni preliminari
● Scollegare dalla tensione l'apparecchio da incasso
● Consentire il libero accesso
● Rimuovere la copertura di protezione
Operazioni di smontaggio
La numerazione delle operazioni di smontaggio corrisponde a quella riportata nella figura.
1. Rimuovere la barra di rame (12 viti).
2. Rimuovere le viti di fissaggio del ventilatore (3 viti)
3. Scollegare le linee di alimentazione (1 x "L", 1 x "N")
A questo punto è possibile estrarre delicatamente il ventilatore.
ATTENZIONE
Danni all'apparecchio dovuti a cavi di segnale danneggiati durante lo smontaggio
Durante l'estrazione del ventilatore, è possibile che vengano danneggiati i cavi di segnale,
con danni conseguenti all'apparecchio.
• Durante l'estrazione del ventilatore fare attenzione a non danneggiare i cavi di segnale.
Operazioni di montaggio
Per il montaggio eseguire in senso inverso le stesse operazioni dello smontaggio.
Nota
Rispetto delle coppie di serraggio
Rispettare le coppie di serraggio riportate nella tabella "Coppie di serraggio per parti
conduttive".
Nota
Azzeramento del contatore delle ore di esercizio
Dopo la sostituzione del ventilatore si dovrebbe resettare il contatore delle ore di esercizio
del ventilatore impostando p0251 = 0.
Convertitori da incasso
504
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.4 Sostituzione di componenti
11.4.12
Sostituzione del ventilatore, grandezza costruttiva JX
Sostituzione del ventilatore, Powerblock di sinistra
Figura 11-18 Sostituzione del ventilatore del Powerblock di sinistra, grandezza costruttiva JX
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
505
Manutenzione e riparazione
11.4 Sostituzione di componenti
Descrizione
La durata utile dei ventilatori è generalmente di 50.000 ore. La durata effettiva dipende
comunque da ulteriori grandezze, quali ad es. la temperatura ambiente e il grado di
protezione dell'armadio e in determinati casi può pertanto discostarsi da questo valore.
I ventilatori devono essere sostituiti per tempo, per garantire la disponibilità dell'apparecchio.
Operazioni preliminari
● Scollegare dalla tensione l'apparecchio da incasso
● Consentire il libero accesso
● Rimuovere la copertura di protezione
Operazioni di smontaggio
La numerazione delle operazioni di smontaggio corrisponde a quella riportata nella figura.
1. Rimuovere le viti di fissaggio del ventilatore (3 viti)
2. Scollegare le linee di alimentazione (1 x "L", 1 x "N")
A questo punto è possibile estrarre delicatamente il ventilatore.
ATTENZIONE
Danni all'apparecchio dovuti a cavi di segnale danneggiati durante lo smontaggio
Durante l'estrazione del ventilatore, è possibile che vengano danneggiati i cavi di segnale,
con danni conseguenti all'apparecchio.
• Durante l'estrazione del ventilatore fare attenzione a non danneggiare i cavi di segnale.
Operazioni di montaggio
Per il montaggio eseguire in senso inverso le stesse operazioni dello smontaggio.
Nota
Rispetto delle coppie di serraggio
Rispettare le coppie di serraggio riportate nella tabella "Coppie di serraggio per parti
conduttive".
Nota
Azzeramento del contatore delle ore di esercizio
Dopo la sostituzione del ventilatore si dovrebbe resettare il contatore delle ore di esercizio
del ventilatore impostando p0251 = 0.
Convertitori da incasso
506
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.4 Sostituzione di componenti
Sostituzione del ventilatore, Powerblock di destra
Figura 11-19 Sostituzione del ventilatore del Powerblock di destra, grandezza costruttiva JX
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
507
Manutenzione e riparazione
11.4 Sostituzione di componenti
Descrizione
La durata utile dei ventilatori è generalmente di 50.000 ore. La durata effettiva dipende
comunque da ulteriori grandezze, quali ad es. la temperatura ambiente e il grado di
protezione dell'armadio e in determinati casi può pertanto discostarsi da questo valore.
I ventilatori devono essere sostituiti per tempo, per garantire la disponibilità dell'apparecchio.
Operazioni preliminari
● Scollegare dalla tensione l'apparecchio da incasso
● Consentire il libero accesso
● Rimuovere la copertura di protezione
Operazioni di smontaggio
La numerazione delle operazioni di smontaggio corrisponde a quella riportata nella figura.
1. Rimuovere la sbarra collettrice (8 viti)
2. Rimuovere le viti di fissaggio del ventilatore (3 viti)
3. Scollegare le linee di alimentazione (1 x "L", 1 x "N")
A questo punto è possibile estrarre delicatamente il ventilatore.
ATTENZIONE
Danni all'apparecchio dovuti a cavi di segnale danneggiati durante lo smontaggio
Durante l'estrazione del ventilatore, è possibile che vengano danneggiati i cavi di segnale,
con danni conseguenti all'apparecchio.
• Durante l'estrazione del ventilatore fare attenzione a non danneggiare i cavi di segnale.
Operazioni di montaggio
Per il montaggio eseguire in senso inverso le stesse operazioni dello smontaggio.
Nota
Rispetto delle coppie di serraggio
Rispettare le coppie di serraggio riportate nella tabella "Coppie di serraggio per parti
conduttive".
Nota
Azzeramento del contatore delle ore di esercizio
Dopo la sostituzione del ventilatore si dovrebbe resettare il contatore delle ore di esercizio
del ventilatore impostando p0251 = 0.
Convertitori da incasso
508
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.5 Forming dei condensatori del circuito intermedio
11.5
Forming dei condensatori del circuito intermedio
Descrizione
Dopo un periodo di funzionamento dell'apparecchio superiore ai due anni deve essere
eseguito un nuovo forming dei condensatori del circuito intermedio.
Se la messa in servizio viene eseguita entro due anni dalla costruzione, non è necessario un
nuovo forming dei condensatori del circuito intermedio. La data di costruzione può essere
ricavata dal numero di fabbrica sulla targhetta identificativa; vedere appendice "Panoramica
apparecchio".
ATTENZIONE
Danni materiali da forming omesso
Un forming dell'apparecchiatura non eseguito dopo una durata di servizio di oltre due anni
può provocare, durante il funzionamento, danni materiali sull'apparecchiatura.
• Eseguire il forming di un'apparecchiatura dopo una durata di servizio di più di due anni.
Nota
Tempo di immagazzinaggio
È importante che il tempo di immagazzinaggio venga calcolato a partire dalla data di
costruzione e non da quella della fornitura.
Procedura
Il forming dei condensatori del circuito intermedio avviene applicando la tensione nominale
per almeno 30 minuti alla temperatura ambiente in funzionamento senza carico.
● Funzionamento via PROFIBUS
– Impostare il bit 3 della parola di comando 1 (abilitazione al funzionamento) su "0"
fisso.
– Attivare il convertitore tramite il segnale ON (bit 0 della parola di comando). Tutti gli
altri bit devono essere impostati in modo da consentire il funzionamento del
convertitore.
– Una volta trascorso il tempo di attesa, disinserire il convertitore e ripristinare
l'impostazione originale di PROFIBUS.
● Funzionamento via morsettiera:
– Impostare p0852 su "0" (l'impostazione di fabbrica è "1").
– Attivare il convertitore (tramite l'ingresso digitale 0 della morsettiera utente).
– Una volta trascorso il tempo di attesa, disinserire il convertitore e ripristinare p0852
all'impostazione originale.
Nota
Forming mediante AOP30
In modalità LOCAL mediante AOP30, è impossibile eseguire il forming.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
509
Manutenzione e riparazione
11.6 Segnalazioni dopo la sostituzione di componenti DRIVE-CLiQ
11.6
Segnalazioni dopo la sostituzione di componenti DRIVE-CLiQ
Generalmente dopo la sostituzione di componenti DRIVE-CLiQ (Control Interface Module,
TM31, SMCxx) con parti di ricambio non si ha alcuna segnalazione al momento
dell'inserzione dato che un componente identico viene riconosciuto e accettato come parte di
ricambio all'avviamento.
Se comparisse comunque un messaggio di errore della categoria "Errore di topologia", può
essersi verificato uno dei seguenti errori durante la sostituzione:
● È stato installato un Control Interface Module con dati del firmware diversi.
● Nel collegamento dei cavi DRIVE-CLiQ sono stati invertiti dei connettori.
Aggiornamento automatico del firmware
Dopo l'inserzione dell'elettronica può verificarsi l'aggiornamento automatico del firmware dei
componenti DRIVE-CLiQ sostituiti.
● Durante l'aggiornamento automatico del firmware, il LED "RDY" della Control Unit
lampeggia lentamente di luce arancione (0,5 Hz) e uno dei LED del componente DRIVECLiQ interessato lampeggia lentamente di luce verde-rossa (0,5 Hz).
Nota
Non disinserire il convertitore
Durante questa operazione il convertitore non va disinserito altrimenti l'update firmware
deve essere nuovamente avviato.
● Al termine dell'aggiornamento automatico del firmware, il LED "RDY" della Control Unit
lampeggia rapidamente di luce arancione (2 Hz) e un LED del componente DRIVE-CLiQ
interessato lampeggia rapidamente di luce verde-rossa (2 Hz).
● Dopo la conclusione dell'aggiornamento automatico del firmware occorre eseguire un
POWER ON (spegnimento e accensione dell'apparecchio).
Convertitori da incasso
510
Istruzioni operative, 04/2014, A5E00386872A
Manutenzione e riparazione
11.7 L’aggiornamento del firmware dell’apparecchio
11.7
L’aggiornamento del firmware dell’apparecchio
L'aggiornamento del firmware degli apparecchi ad incasso, ad es. inserendo una nuova
scheda di memoria con una nuova versione del firmware, può richiedere in determinate
situazioni anche l'aggiornamento di componenti DRIVE-CLiQ esistenti.
L'aggiornamento del firmware dei componenti DRIVE-CLiQ avviene automaticamente
tramite l'aggiornamento del firmware, se il sistema ne riconosce la necessità.
Procedura di aggiornamento automatico del firmware
1. Durante l'aggiornamento automatico del firmware, il LED "RDY" della Control Unit
lampeggia lentamente di luce arancione (0,5 Hz).
2. A seconda delle necessità, l'aggiornamento del firmware viene effettuato secondo l'ordine
dei componenti DRIVE-CLiQ, mentre un LED del componente interessato lampeggia
lentamente di luce verde-rossa (0,5 Hz).
3. Quando gli aggiornamenti del firmware di un singolo componente DRIVE-CLiQ è
terminato, il LED del componente lampeggia rapidamente di luce verde-rossa (2 Hz).
4. Al termine dell'aggiornamento completo del firmware, il LED della Control Unit lampeggia
rapidamente di luce arancione (2 Hz).
5. Dopo la conclusione dell'aggiornamento automatico del firmware occorre eseguire un
POWER ON (spegnimento e accensione dell'apparecchio).
Nota
Durante l'aggiornamento non si deve interrompere l'alimentazione dei componenti, altrimenti
l'update firmware deve essere nuovamente avviato.
Nota
L'installazione di un nuovo firmware dovrebbe essere eseguita soltanto in caso di anomalie
dell'apparecchio.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
511
Manutenzione e riparazione
11.7 L’aggiornamento del firmware dell’apparecchio
Convertitori da incasso
512
Istruzioni operative, 04/2014, A5E00386872A
Dati tecnici
12.1
12
Contenuto del capitolo
Questo capitolo descrive:
● Dati tecnici generali e specifici degli apparecchi.
● Indicazioni relative alle limitazioni di impiego degli apparecchi in condizioni ambientali
sfavorevoli (riduzione della potenza).
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
513
Dati tecnici
12.2 Dati generali
12.2
Dati generali
Tabella 12- 1 Dati tecnici generali
Dati elettrici
Forme di rete
Reti TN/TT messe a terra o reti IT non messe a terra (nelle reti a 690 V non è consentito
alcun conduttore di linea messo a terra)
Frequenza di rete
47 ... 63 Hz
Frequenza di uscita
0 ... 300 Hz
Fattore di potenza di rete
Oscillazione di base
Totale
≥ 0,96
0,75 ... 0,93
Rendimento del convertitore
> 98 %
Corrente di cortocircuito
nominale secondo IEC,
associata ai fusibili
specificati
•
1,1 ... 447 kW: 65 kA
•
448 ... 671 kW: 84 kA
•
672 ... 1193 kW: 170 kA
•
>1194 kW: 200 kA
Corrente di cortocircuito
nominale SCCR secondo
UL508C (fino a 600 V),
associata ai fusibili
specificati
•
1,1 ... 447 kW: 65 kA
•
448 ... 671 kW: 84 kA
•
672 ... 1193 kW: 170 kA
•
>1194 kW: 200 kA
Commutazioni in ingresso
1 volta ogni 3 minuti
Categoria di sovratensione
III secondo EN 61800-5-1
Dati meccanici
Grado di protezione
IP20 per grandezze costruttive FX e GX
IP00 per grandezze costruttive HX e JX
Classe di protezione
I secondo EN 61800-5-1
Tipo di raffreddamento
Raffreddamento ad aria potenziato AF secondo EN 60146
Livello di pressione acustica
LpA (1 m)
≤ 73 dB(A) ad una frequenza di rete di 50 Hz
≤ 75 dB(A) ad una frequenza di rete di 60 Hz
Protezione contro i contatti
EN 50274 e BGV A3 per impiego conforme alle prescrizioni
Conformità alle norme
Norme
EN 60146-1, EN 61800-2, EN 61800-3, EN 61800-5-1, EN 60204-1, EN 60529 2)
Marchio CE
Secondo la direttiva EMC n. 2004/108/CE, la direttiva sulla bassa tensione n. 2006/95/CE e
la direttiva macchine n. 2006/42/CE.
Soppressione radiodisturbi
Secondo la normativa EMC sui prodotti per azionamenti a velocità variabile EN 61800-3,
"Secondo ambiente".
Impiego nel "primo ambiente" possibile solo con filtri di rete 1).
Approvazione
cULus (File n.: E192450) (solo fino a 3 AC 600 V)
Convertitori da incasso
514
Istruzioni operative, 04/2014, A5E00386872A
Dati tecnici
12.2 Dati generali
Condizioni ambientali
per magazzinaggio
per il trasporto
in esercizio
Temperatura ambiente
-25 ... +55 °C
-25 ... +70 °C
a partire da –40 °C per 24
ore
0 ... +40 °C
Umidità relativa dell'aria 2)
(condensa non ammessa)
corrispondente alla classe
5 ... 95 %
5 ... 95 % a 40 °C
5 ... 95 %
1K4 secondo EN 60721-3-1
2K3 secondo EN 60721-3-2
3K3 secondo EN 60721-3-3
Classe ambientale/sostanze
nocive 2)
1C2 secondo EN 60721-3-1
2C2 secondo EN 60721-3-2
3C2 secondo EN 60721-3-3
Influssi organici/biologici 2)
1B1 secondo EN 60721-3-1
2B1 secondo EN 60721-3-2
3B1 secondo EN 60721-3-3
Grado d'inquinamento
2 secondo EN 61800-5-1
Altitudine d'installazione
Fino a 2000 m s.l.m. senza riduzione della potenza,
> 2000 m s.l.m. con riduzione della potenza (vedere il capitolo "Dati di derating")
Resistenza meccanica
Sollecitazioni da vibrazioni
- Deviazione
- Accelerazione
corrisponde alla classe
fino a + 55 °C con derating
per magazzinaggio
per il trasporto
in esercizio
1,5 mm a 5 ... 9 Hz
5 m/s² a > 9 ... 200 Hz
1M2 secondo EN 60721-3-1
3,1 mm a 5 ... 9 Hz
10 m/s² a > 9 ... 200 Hz
2M2 secondo EN 60721-3-2
0,075 mm a 10 ... 58 Hz
10 m/s² a > 58 ... 200 Hz
-
40 m/s² a 22 ms
1M2 secondo EN 60721-3-1
100 m/s² a 11 ms
2M2 secondo EN 60721-3-2
100 m/s² a 11 ms
3M4 secondo EN 60721-3-3
2)
Sollecitazione da urti 2)
- Accelerazione
corrisponde alla classe
Le differenze rispetto alle classi indicate sono evidenziate in corsivo.
1) Vale
per le lunghezze del conduttore fino a 100 m.
2)Le
norme EN indicate sono le versioni europee delle norme internazionali IEC con le stesse
sigle.
12.2.1
Dati di derating
12.2.1.1
Derating di corrente in funzione della temperatura ambiente
Corrente di uscita ammessa in funzione della temperatura ambiente
Le apparecchiature e i relativi componenti di sistema sono dimensionati per una temperatura
ambiente di 40 °C e un'altitudine di installazione massima di 2000 m s.l.m. Se le
apparecchiature vengono utilizzate a temperature ambiente superiori a 40 °C, occorre
ridurre la corrente di uscita. Non sono ammesse temperature ambiente superiori a 50 °C.
Nella seguente tabella è indicata la corrente di uscita massima in funzione della temperatura
ambiente.
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
515
Dati tecnici
12.2 Dati generali
Tabella 12- 2 Fattori di derating della corrente in funzione della temperatura ambiente (temperatura dell'aria in ingresso)
Altitudine di
installazione s.l.m. in
m
0 ... 2000
12.2.1.2
Fattore di derating della corrente (in % della corrente nominale)
con una temperatura ambiente (temperatura dell'aria in ingresso) di
20 °C
25 °C
30 °C
35 °C
40 °C
45 °C
50 °C
55 °C
100 %
100 %
100 %
100 %
100 %
93,3 %
86,7 %
80,0 %
Altitudini di installazione superiori a 2000 m ... 5000 m s.l.m.
Se i convertitori SINAMICS G130 vengono utilizzati ad altitudini di installazione superiori a
2000 m s.l.m., è necessario tener presente che con l'aumentare dell'altitudine di installazione
si riduce la pressione atmosferica e, di conseguenza, la densità dell'aria. Una minore densità
dell'aria compromette la capacità di isolamento della stessa e l'efficacia del raffreddamento.
L'installazione ad altitudini superiori a 2000 ... 5000 m può essere effettuata alle seguenti
condizioni.
Riduzione della temperatura ambiente e della corrente di uscita
A causa della minore efficacia del raffreddamento è necessario da un lato ridurre la
temperatura ambiente e dall'altro limitare il calore dissipato nel convertitore abbassando la
corrente di uscita; in questo caso si possono calcolare, come compensazione, temperature
ambiente inferiori a 40 °C che vengono tenute in considerazione nelle tabelle. Nelle seguenti
tabelle sono indicate le correnti di uscita ammesse in funzione dell'altitudine di installazione
e della temperatura ambiente. La compensazione ammessa tra altitudine di installazione e
temperature ambiente inferiori a 40 °C (temperatura dell'aria in ingresso al convertitore) è
considerata nei valori indicati. Questi valori sono validi a condizione che negli apparecchi
installati in armadio sia garantito il flusso dell'aria di raffreddamento specificato nei Dati
tecnici.
Tabella 12- 3 Derating di corrente in base alla temperatura ambiente (temperatura dell'aria all'ingresso nell'apparecchio in
armadio) e all'altitudine di installazione
Altitudine di
installazione s.l.m. in
m
Fattore di derating della corrente (in % della corrente nominale)
con una temperatura ambiente (temperatura dell'aria in ingresso) di
20 °C
25 °C
30 °C
35 °C
40 °C
45 °C
50 °C
55 °C
0 ... 2000
100 %
100 %
100 %
... 2500
100 %
100 %
100 %
100 %
100 %
93,3 %
86,7 %
80,0 %
100 %
96,3 %
... 3000
100 %
100 %
100 %
98,7 %
... 3500
100 %
100 %
100 %
... 4000
100 %
100 %
96,3 %
... 4500
100 %
97,5 %
... 5000
98,2 %
Convertitori da incasso
516
Istruzioni operative, 04/2014, A5E00386872A
Dati tecnici
12.2 Dati generali
Impiego di un trasformatore di isolamento per la riduzione delle sovratensioni transitorie secondo
IEC 61800-5-1
In questo modo, la categoria di sovratensione III viene ridotta alla categoria di
sovratensione II; ne consegue una riduzione dei requisiti di isolamento dell'aria. Non è
richiesto un derating di tensione aggiuntivo (riduzione della tensione di ingresso) se sono
rispettate le seguenti condizioni marginali:
● Il trasformatore di isolamento deve essere alimentato tramite una rete a bassa tensione o
una rete a media tensione e non deve essere collegato direttamente ad una rete ad alta
tensione.
● Il trasformatore di isolamento può alimentare uno o più convertitori.
● I cavi di collegamento tra il trasformatore di isolamento e il convertitore devono essere
posati in modo da escludere la possibilità di scariche dirette di fulmine, ovvero senza
utilizzare conduttori liberi.
● Sono ammesse le seguenti forme di rete:
– Reti TN con centro stella messo a terra (senza conduttore esterno messo a terra).
– Reti IT (il funzionamento con cortocircuito verso terra deve essere limitato a tempi più
brevi possibili).
12.2.1.3
Derating di corrente in funzione della frequenza impulsi
Se si aumenta la frequenza impulsi occorre considerare un fattore di derating della corrente
di uscita. Questo fattore di derating deve essere applicato alle correnti indicate nei dati
tecnici.
Tabella 12- 4 Fattore di derating della corrente di uscita in relazione alla frequenza impulsi nel caso di apparecchiature con
frequenza impulsi nominale di 2 kHz
N. di
ordinazione
Potenza tipica
6SL3310-...
[kW]
Corrente di uscita
a 2 kHz
[A]
Fattore di derating con frequenza impulsi
2,5 kHz
4 kHz
5 kHz
7,5 kHz
8 kHz
Tensione di allacciamento 3 AC 380 ... 480 V
1GE32-1AAx
110
210
95 %
82 %
74 %
54 %
50 %
1GE32-6AAx
132
260
95 %
83 %
74 %
54 %
50 %
1GE33-1AAx
160
310
97 %
88 %
78 %
54 %
50 %
1GE33-8AAx
200
380
96 %
87 %
77 %
54 %
50 %
1GE35-0AAx
250
490
94 %
78 %
71 %
53 %
50 %
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
517
Dati tecnici
12.2 Dati generali
Tabella 12- 5 Fattore di derating della corrente di uscita in relazione alla frequenza impulsi nel caso di apparecchiature con
frequenza impulsi nominale di 1,25 kHz
N. di
ordinazione
Potenza tipica
Corrente di uscita
a 1,25 kHz
Fattore di derating con frequenza impulsi
6SL3310-...
[kW]
[A]
1GE36-1AAx
315
605
83 %
1GE37-5AAx
400
745
1GE38-4AAx
450
1GE41-0AAx
560
1GF31-8AAx
110
175
92 %
1GF32-2AAx
132
215
1GF32-6AAx
160
1GF33-3AAx
200
1GF34-1AAx
2 kHz
2,5 kHz
4 kHz
5 kHz
7,5 kHz
72 %
64 %
60 %
40 %
83 %
72 %
64 %
60 %
40 %
840
87 %
79 %
64 %
55 %
40 %
985
92 %
87 %
70 %
60 %
50 %
87 %
70 %
60 %
40 %
92 %
87 %
70 %
60 %
40 %
260
92 %
88 %
71 %
60 %
40 %
330
89 %
82 %
65 %
55 %
40 %
250
410
89 %
82 %
65 %
55 %
35 %
1GF34-7AAx
315
465
92 %
87 %
67 %
55 %
35 %
1GF35-8AAx
400
575
91 %
85 %
64 %
50 %
35 %
1GF37-4AAx
500
735
87 %
79 %
64 %
55 %
35 %
1GF38-1AAx
560
810
83 %
72 %
61 %
55 %
35 %
Tensione di allacciamento 3 AC 380 ... 480 V
Tensione di allacciamento 3 AC 500 ... 600 V
Tensione di allacciamento 3 AC 660 ... 690 V
1GH28-5AAx
75
85
93 %
89 %
71 %
60 %
40 %
1GH31-0AAx
90
100
92 %
88 %
71 %
60 %
40 %
1GH31-2AAx
110
120
92 %
88 %
71 %
60 %
40 %
1GH31-5AAx
132
150
90 %
84 %
66 %
55 %
35 %
1GH31-8AAx
160
175
92 %
87 %
70 %
60 %
40 %
1GH32-2AAx
200
215
92 %
87 %
70 %
60 %
40 %
1GH32-6AAx
250
260
92 %
88 %
71 %
60 %
40 %
1GH33-3AAx
315
330
89 %
82 %
65 %
55 %
40 %
1GH34-1AAx
400
410
89 %
82 %
65 %
55 %
35 %
1GH34-7AAx
450
465
92 %
87 %
67 %
55 %
35 %
1GH35-8AAx
560
575
91 %
85 %
64 %
50 %
35 %
1GH37-4AAx
710
735
87 %
79 %
64 %
55 %
35 %
1GH38-1AAx
800
810
83 %
72 %
61 %
55 %
35 %
Nota
Fattori di derating per frequenze di impulsi comprese tra valori fissi
Per frequenze impulsi comprese tra i valori fissi indicati è possibile determinare i fattori di
derating mediante interpolazione lineare.
Convertitori da incasso
518
Istruzioni operative, 04/2014, A5E00386872A
Dati tecnici
12.2 Dati generali
12.2.2
Sovraccaricabilità
I convertitori presentano una riserva di sovraccarico, utile ad es. per superare le coppie di
scollamento.
Per gli azionamenti con richieste di sovraccarico occorre quindi prevedere la corrente di
carico di base corrispondente al carico richiesto.
I sovraccarichi presuppongono che prima e dopo il sovraccarico il convertitore funzioni con
la sua corrente di carico di base, con una durata del ciclo di 300 s.
Sovraccarico basso
La corrente di carico base per sovraccarico basso IL si basa sul ciclo 110 % per 60 s oppure
150 % per 10 s.
Figura 12-1
Sovraccarico basso
Sovraccarico elevato
La corrente di carico di base per sovraccarico elevato IH si basa sul ciclo 150 % per 60 s
oppure 160 % per 10 s.
Figura 12-2
Sovraccarico elevato
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
519
Dati tecnici
12.3 Dati tecnici
12.3
Dati tecnici
Nota
Note relative ai dati tecnici
Le indicazioni di corrente, tensione e potenza contenute in questa tabella sono valori
nominali
La protezione dei cavi verso l'apparecchio avviene tramite fusibili con caratteristica gG.
Le sezioni di collegamento si riferiscono a cavi in rame con tre conduttori orizzontali posati in
aria ad una temperatura ambiente di 40 °C (secondo DIN VDE 0276-1000 o IEC 60364-552) con una temperatura d'esercizio di 70 °C (ad es. Protodur NYY o NYCWY) e con la
protezione dei conduttori raccomandata secondo DIN VDE 0100 parte 430 o IEC 60364-443.
ATTENZIONE
Danni materiali dovuti a temperature dei cavi non consentite
Una disposizione inappropriata dei cavi può provocare cortocircuiti da danni dell'isolamento
a causa delle temperature eccessive.
In caso di condizioni diverse (posa dei cavi, ammassamento cavi, temperatura ambiente)
occorre tenere in considerazione le seguenti avvertenze per la posa dei cavi:
• La sezione del cavo necessaria è determinata secondo l'intensità della corrente che
viene fatta fluire nel cavo.
• La caricabilità in corrente ammessa per i cavi è definita ad esempio nelle norme
DIN VDE 0276-1000 o IEC 60364-5-52. Si riferisce da un lato alle condizioni ambientali,
come la temperatura, e dall'altro al tipo di posa. Nella posa semplice i cavi vengono
raffreddati relativamente bene. Più cavi posati insieme possono invece riscaldarsi a
vicenda. Al riguardo si rimanda ai fattori di riduzione per le relative condizioni marginali
previste in DIN VDE 0276-1000 o IEC 60364-5-52.
Convertitori da incasso
520
Istruzioni operative, 04/2014, A5E00386872A
Dati tecnici
12.3 Dati tecnici
12.3.1
Power Module
Power Module, 3 AC 380 ... 480 V
Tabella 12- 6 Power Module, 3 AC 380 ... 480 V, Parte 1
N. di ordinazione
6SL3310-
1GE32-1AAx
1GE32-6AAx
1GE33-1AAx
Potenza tipica
- con IL a 50 Hz, 400 V 1)
- con IH a 50 Hz, 400 V 1)
- con IL a 60 Hz, 460 V 2)
- con IH a 60 Hz, 460 V 2)
kW
kW
hp
hp
110
90
150
150
132
110
200
200
160
132
250
200
Corrente di uscita
- Corrente nominale IN
- Corrente di carico di base IL 3)
- Corrente di carico di base IH 4)
A
A
A
210
205
178
260
250
233
310
302
277
A
A
A
229
335
0,8
284
410
0,8
338
495
0,9
Corrente di ingresso
- Corrente di ingresso nominale
- Corrente di ingresso, max.
- Alimentazione ausiliaria di corrente
DC 24 V 5)
Tensioni di collegamento
- Tensione di rete
- Alimentazione dell'elettronica
- Tensione di uscita
VACeff
VDC
VACeff
Potenza dissipata
kW
2,46
3,27
4
Aria di raffreddamento necessaria
m³/s
0,17
0,23
0,36
Lunghezza max. dei cavi
tra Power Module e motore
- schermato
- non schermato
m
m
300
450
300
450
300
450
Livello di pressione acustica
LpA (1 m) a 50/60 Hz
dB(A)
64/67
64/67
69/73
mm2
Vite M10
2 x 185
Vite M10
2 x 185
Vite M10
2 x 240
Vite M10
Vite M10
Vite M10
Collegamento alla rete (U1, V1, W1)
Sezione max. dei collegamenti (IEC)
3 AC 380 ... 480 V ±10 % (-15 % < 1 min)
24 (20,4 ... 28,8)
3 AC 0 ... tensione di rete
Collegamento motore
(U2/T1, V2/T2, W2/T3)
Sezione max. dei collegamenti (IEC)
mm2
2 x 185
2 x 185
2 x 240
Collegamento PE1 / GND
Sezione max. dei collegamenti (IEC)
mm2
Vite M10
2 x 185
Vite M10
2 x 185
Vite M10
2 x 240
Collegamento PE2 / GND
Sezione max. dei collegamenti (IEC)
mm2
Vite M10
2 x 185
Vite M10
2 x 185
Vite M10
2 x 240
IP20
IP20
IP20
326
1400
356
326
1400
356
326
1533
545
FX
FX
GX
104
104
176
Grado di protezione
Dimensioni
- larghezza
- altezza
- profondità
mm
mm
mm
Grandezza costruttiva
Peso approssimativo
kg
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
521
Dati tecnici
12.3 Dati tecnici
N. di ordinazione
6SL3310-
Fusibili raccomandati
- Protezione conduttori
senza protez. semiconduttori
Corrente nominale
A
Grandezza costruttiva secondo
IEC 60269
- Protezione conduttori e semiconduttori A
6)
Corrente nominale
Grandezza costruttiva secondo
IEC 60269
Corrente di cortocircuito minima 7)
A
1GE32-1AAx
1GE32-6AAx
1GE33-1AAx
3NA3144
250
2
3NE1230-2
315
1
3NA3250
300
3
3NE1331-2
350
2
3NA3254
355
3
3NE1334-2
500
2
3000
3600
4400
1)
Potenza nominale di un tipico motore asincrono standard a 6 poli su base IL o IH a 3 AC 50 Hz 400 V.
2)
Potenza nominale di un tipico motore asincrono standard a 6 poli su base IL o IH a 3 AC 60 Hz 460 V.
3)
La corrente di carico di base IL si basa su un ciclo di carico del 110 % per 60 s oppure del 150 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
4)
La corrente di carico di base IH si basa su un ciclo di carico del 150 % per 60 s oppure del 160 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
5)
Se l'alimentazione ausiliaria deve essere separata dall'alimentazione di carico, ad es. se la regolazione deve essere
ancora in grado di comunicare anche in assenza di tensione di rete.
6)
Per l'installazione di un sistema con approvazione UL sono assolutamente necessari i fusibili indicati.
7)
Corrente minima richiesta per l'intervento sicuro degli elementi di protezione previsti del tipo 3NE1.
Convertitori da incasso
522
Istruzioni operative, 04/2014, A5E00386872A
Dati tecnici
12.3 Dati tecnici
Tabella 12- 7 Power Module, 3 AC 380 ... 480 V, Parte 2
N. di ordinazione
6SL3310-
1GE33-8AAx
1GE35-0AAx
1GE36-1AAx
Potenza tipica
- con IL a 50 Hz, 400 V 1)
- con IH a 50 Hz, 400 V 1)
- con IL a 60 Hz, 460 V 2)
- con IH a 60 Hz, 460 V 2)
kW
kW
hp
hp
200
160
300
250
250
200
400
350
315
250
500
350
Corrente di uscita
- Corrente nominale IN
- Corrente di carico di base IL 3)
- Corrente di carico di base IH 4)
A
A
A
380
370
340
490
477
438
605
590
460
A
A
A
395
606
0,9
509
781
0,9
629
967
1,0
Corrente di ingresso
- Corrente di ingresso nominale
- Corrente di ingresso, max.
- Alimentazione ausiliaria di corrente
DC 24 V 5)
Tensioni di collegamento
- Tensione di rete
- Alimentazione dell'elettronica
- Tensione di uscita
VACeff
VDC
VACeff
3 AC 380 ... 480 V ±10 % (-15 % < 1 min)
24 (20,4 ... 28,8)
3 AC 0 ... tensione di rete
Potenza dissipata
kW
4,54
5,78
7,8
Aria di raffreddamento necessaria
m³/s
0,36
0,36
0,78
Lunghezza max. dei cavi
tra Power Module e motore
- schermato
- non schermato
m
m
300
450
300
450
300
450
Livello di pressione acustica
LpA (1 m) a 50/60 Hz
dB(A)
69/73
69/73
70/73
mm2
Vite M10
2 x 240
Vite M10
2 x 240
2 viti M12
4 x 240
Vite M10
Vite M10
2 viti M12
Collegamento alla rete (U1, V1, W1)
Sezione max. dei collegamenti (IEC)
Collegamento motore
(U2/T1, V2/T2, W2/T3)
Sezione max. dei collegamenti (IEC)
mm2
2 x 240
2 x 240
4 x 240
Collegamento PE1 / GND
Sezione max. dei collegamenti (IEC)
mm2
Vite M10
2 x 240
Vite M10
2 x 240
Vite M12
2 x 240
Collegamento PE2 / GND
Sezione max. dei collegamenti (IEC)
mm2
Vite M10
2 x 240
Vite M10
2 x 240
2 viti M12
4 x 240
IP20
IP20
IP00
326
1533
545
326
1533
545
503
1506
540
GX
GX
HX
176
176
294
Grado di protezione
Dimensioni
- larghezza
- altezza
- profondità
mm
mm
mm
Grandezza costruttiva
Peso approssimativo
kg
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
523
Dati tecnici
12.3 Dati tecnici
N. di ordinazione
6SL3310-
Fusibili raccomandati
- Protezione conduttori
senza protez. semiconduttori
Corrente nominale
A
Grandezza costruttiva secondo
IEC 60269
- Protezione conduttori e semiconduttori A
6)
Corrente nominale
Grandezza costruttiva secondo
IEC 60269
Corrente di cortocircuito minima 7)
A
1GE33-8AAx
1GE35-0AAx
1GE36-1AAx
3NA3260
400
3
3NE1334-2
450
2
3NA3372
630
3
3NE1436-2
630
3
3NA3475
800
4
3NE1438-2
800
3
4400
8000
10000
1)
Potenza nominale di un tipico motore asincrono standard a 6 poli su base IL o IH a 3 AC 50 Hz 400 V.
2)
Potenza nominale di un tipico motore asincrono standard a 6 poli su base IL o IH a 3 AC 60 Hz 460 V.
3)
La corrente di carico di base IL si basa su un ciclo di carico del 110 % per 60 s oppure del 150 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
4)
La corrente di carico di base IH si basa su un ciclo di carico del 150 % per 60 s oppure del 160 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
5)
Se l'alimentazione ausiliaria deve essere separata dall'alimentazione di carico, ad es. se la regolazione deve essere
ancora in grado di comunicare anche in assenza di tensione di rete.
6)
Per l'installazione di un sistema con approvazione UL sono assolutamente necessari i fusibili indicati.
7)
Corrente minima richiesta per l'intervento sicuro degli elementi di protezione previsti del tipo 3NE1.
Convertitori da incasso
524
Istruzioni operative, 04/2014, A5E00386872A
Dati tecnici
12.3 Dati tecnici
Tabella 12- 8 Power Module, 3 AC 380 ... 480 V, Parte 3
N. di ordinazione
6SL3310-
1GE37-5AAx
1GE38-4AAx
1GE41-0AAx
Potenza tipica
- con IL a 50 Hz, 400 V 1)
- con IH a 50 Hz, 400 V 1)
- con IL a 60 Hz, 460 V 2)
- con IH a 60 Hz, 460 V 2)
kW
kW
hp
hp
400
315
600
450
450
400
700
600
560
450
800
700
Corrente di uscita
- Corrente nominale IN
- Corrente di carico di base IL 3)
- Corrente di carico di base IH 4)
A
A
A
745
725
570
840
820
700
985
960
860
A
A
A
775
1188
1,0
873
1344
1,0
1024
1573
1,25
Corrente di ingresso
- Corrente di ingresso nominale
- Corrente di ingresso, max.
- Alimentazione ausiliaria di corrente
DC 24 V 5)
Tensioni di collegamento
- Tensione di rete
- Alimentazione dell'elettronica
- Tensione di uscita
VACeff
VDC
VACeff
3 AC 380 ... 480 V ±10 % (-15 % < 1 min)
24 (20,4 ... 28,8)
3 AC 0 ... tensione di rete
Potenza dissipata
kW
9,1
9,6
13,8
Aria di raffreddamento necessaria
m³/s
0,78
0,78
1,48
Lunghezza max. dei cavi
tra Power Module e motore
- schermato
- non schermato
m
m
300
450
300
450
300
450
Livello di pressione acustica
LpA (1 m) a 50/60 Hz
dB(A)
70/73
70/73
72/75
mm2
2 viti M12
4 x 240
2 viti M12
4 x 240
3 viti M12
6 x 240
2 viti M12
2 viti M12
Vite M12
Collegamento alla rete (U1, V1, W1)
Sezione max. dei collegamenti (IEC)
Collegamento motore
(U2/T1, V2/T2, W2/T3)
Sezione max. dei collegamenti (IEC)
mm2
4 x 240
4 x 240
6 x 240
Collegamento PE1 / GND
Sezione max. dei collegamenti (IEC)
mm2
Vite M12
2 x 240
Vite M12
2 x 240
2 viti M12
4 x 240
Collegamento PE2 / GND
Sezione max. dei collegamenti (IEC)
mm2
2 viti M12
4 x 240
2 viti M12
4 x 240
3 viti M12
6 x 240
IP00
IP00
IP00
503
1506
540
503
1506
540
909
1510
540
HX
HX
JX
294
294
530
Grado di protezione
Dimensioni
- larghezza
- altezza
- profondità
mm
mm
mm
Grandezza costruttiva
Peso approssimativo
kg
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
525
Dati tecnici
12.3 Dati tecnici
N. di ordinazione
6SL3310-
Fusibili raccomandati
- Protezione conduttori
senza protez. semiconduttori
Corrente nominale
A
Grandezza costruttiva secondo
IEC 60269
- Protezione conduttori e semiconduttori A
6)
Corrente nominale
Grandezza costruttiva secondo
IEC 60269
Corrente di cortocircuito minima 7)
A
1GE37-5AAx
1GE38-4AAx
1GE41-0AAx
3NA3475
800
4
3NE1448-2
850
3
3NA3365
2 x 500
3
3NE1436-2
2 x 630
3
3NA3472
2 x 630
3
3NE1437-2
2 x 710
3
10500
16000
18400
1)
Potenza nominale di un tipico motore asincrono standard a 6 poli su base IL o IH a 3 AC 50 Hz 400 V.
2)
Potenza nominale di un tipico motore asincrono standard a 6 poli su base IL o IH a 3 AC 60 Hz 460 V.
3)
La corrente di carico di base IL si basa su un ciclo di carico del 110 % per 60 s oppure del 150 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
4)
La corrente di carico di base IH si basa su un ciclo di carico del 150 % per 60 s oppure del 160 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
5)
Se l'alimentazione ausiliaria deve essere separata dall'alimentazione di carico, ad es. se la regolazione deve essere
ancora in grado di comunicare anche in assenza di tensione di rete.
6)
Per l'installazione di un sistema con approvazione UL sono assolutamente necessari i fusibili indicati.
7)
Corrente minima richiesta per l'intervento sicuro degli elementi di protezione previsti del tipo 3NE1.
Convertitori da incasso
526
Istruzioni operative, 04/2014, A5E00386872A
Dati tecnici
12.3 Dati tecnici
Power Module, 3 AC 500 ... 600 V
Tabella 12- 9 Power Module, 3 AC 500 ... 600 V, Parte 1
N. di ordinazione
6SL3310-
1GF31-8AAx
1GF32-2AAx
1GF32-6AAx
Potenza tipica
- con IL a 50 Hz, 500 V 1)
- con IH a 50 Hz, 500 V 1)
- con IL a 60 Hz, 575 V 2)
- con IH a 60 Hz, 575 V 2)
kW
kW
hp
hp
110
90
150
150
132
110
200
200
160
132
250
200
Corrente di uscita
- Corrente nominale IN
- Corrente di carico di base IL 3)
- Corrente di carico di base IH 4)
A
A
A
175
171
157
215
208
192
260
250
233
A
A
A
191
279
0,9
224
341
0,9
270
410
0,9
Corrente di ingresso
- Corrente di ingresso nominale
- Corrente di ingresso, max.
- Alimentazione ausiliaria di corrente
DC 24 V 5)
Tensioni di collegamento
- Tensione di rete
- Alimentazione dell'elettronica
- Tensione di uscita
VACeff
VDC
VACeff
Potenza dissipata
kW
3,0
3,4
3,9
Aria di raffreddamento necessaria
m³/s
0,36
0,36
0,36
Lunghezza max. dei cavi
tra Power Module e motore
- schermato
- non schermato
m
m
300
450
300
450
300
450
Livello di pressione acustica
LpA (1 m) a 50/60 Hz
dB(A)
69/73
69/73
69/73
Collegamento alla rete (U1, V1, W1)
Sezione max. dei collegamenti (IEC)
mm2
Vite M10
2 x 240
Vite M10
2 x 240
Vite M10
2 x 240
Vite M10
Vite M10
Vite M10
mm2
2 x 240
2 x 240
2 x 240
Collegamento PE1 / GND
Sezione max. dei collegamenti (IEC)
mm2
Vite M10
2 x 240
Vite M10
2 x 240
Vite M10
2 x 240
Collegamento PE2 / GND
Sezione max. dei collegamenti (IEC)
mm2
Vite M10
2 x 240
Vite M10
2 x 240
Vite M10
2 x 240
IP20
IP20
IP20
326
1533
545
326
1533
545
326
1533
545
GX
GX
GX
176
176
176
Collegamento motore
(U2/T1, V2/T2, W2/T3)
Sezione max. dei collegamenti (IEC)
Grado di protezione
Dimensioni
- larghezza
- altezza
- profondità
mm
mm
mm
Grandezza costruttiva
Peso approssimativo
kg
3 AC 500 ... 600 V ±10 % (-15 % < 1 min)
24 (20,4 ... 28,8)
3 AC 0 ... tensione di rete
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
527
Dati tecnici
12.3 Dati tecnici
N. di ordinazione
6SL3310-
Fusibili raccomandati
- Protezione conduttori
senza protez. semiconduttori
Corrente nominale
A
Grandezza costruttiva secondo
IEC 60269
- Protezione conduttori e semiconduttori A
6)
Corrente nominale
Grandezza costruttiva secondo
IEC 60269
Corrente di cortocircuito minima 7)
A
1GF31-8AAx
1GF32-2AAx
1GF32-6AAx
3NA3244-6
250
2
3NE1227-2
250
1
3NA3252-6
315
2
3NE1230-2
315
1
3NA3354-6
355
3
3NE1331-2
350
2
2400
3000
3600
1)
Potenza nominale di un tipico motore asincrono standard a 6 poli su base IL o IH a 3 AC 50 Hz 500 V.
2)
Potenza nominale di un tipico motore asincrono standard a 6 poli su base IL o IH a 3 AC 60 Hz 575 V.
3)
La corrente di carico di base IL si basa su un ciclo di carico del 110 % per 60 s oppure del 150 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
4)
La corrente di carico di base IH si basa su un ciclo di carico del 150 % per 60 s oppure del 160 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
5)
Se l'alimentazione ausiliaria deve essere separata dall'alimentazione di carico, ad es. se la regolazione deve essere
ancora in grado di comunicare anche in assenza di tensione di rete.
6)
Per l'installazione di un sistema con approvazione UL sono assolutamente necessari i fusibili indicati.
7)
Corrente minima richiesta per l'intervento sicuro degli elementi di protezione previsti del tipo 3NE1.
Convertitori da incasso
528
Istruzioni operative, 04/2014, A5E00386872A
Dati tecnici
12.3 Dati tecnici
Tabella 12- 10
Power Module, 3 AC 500 ... 600 V, Parte 2
N. di ordinazione
6SL3310-
1GF33-3AAx
1GF34-1AAx
1GF34-7AAx
Potenza tipica
- con IL a 50 Hz, 500 V 1)
- con IH a 50 Hz, 500 V 1)
- con IL a 60 Hz, 575 V 2)
- con IH a 60 Hz, 575 V 2)
kW
kW
hp
hp
200
160
300
250
250
200
400
350
315
250
450
450
Corrente di uscita
- Corrente nominale IN
- Corrente di carico di base IL 3)
- Corrente di carico di base IH 4)
A
A
A
330
320
280
410
400
367
465
452
416
A
A
A
343
525
0,9
426
655
1,0
483
740
1,0
Corrente di ingresso
- Corrente di ingresso nominale
- Corrente di ingresso, max.
- Alimentazione ausiliaria di corrente
DC 24 V 5)
Tensioni di collegamento
- Tensione di rete
- Alimentazione dell'elettronica
- Tensione di uscita
VACeff
VDC
VACeff
3 AC 500 ... 600 V ±10 % (-15 % < 1 min)
24 (20,4 ... 28,8)
3 AC 0 ... tensione di rete
Potenza dissipata
kW
4,9
6,4
7,3
Aria di raffreddamento necessaria
m³/s
0,36
0,78
0,78
Lunghezza max. dei cavi
tra Power Module e motore
- schermato
- non schermato
m
m
300
450
300
450
300
450
Livello di pressione acustica
LpA (1 m) a 50/60 Hz
dB(A)
69/73
70/73
70/73
mm2
Vite M10
2 x 240
2 viti M12
4 x 240
2 viti M12
4 x 240
Vite M10
2 viti M12
2 viti M12
Collegamento alla rete (U1, V1, W1)
Sezione max. dei collegamenti (IEC)
Collegamento motore
(U2/T1, V2/T2, W2/T3)
Sezione max. dei collegamenti (IEC)
mm2
2 x 240
4 x 240
4 x 240
Collegamento PE1 / GND
Sezione max. dei collegamenti (IEC)
mm2
Vite M10
2 x 240
Vite M12
2 x 240
Vite M12
2 x 240
Collegamento PE2 / GND
Sezione max. dei collegamenti (IEC)
mm2
Vite M10
2 x 240
2 viti M12
4 x 240
2 viti M12
4 x 240
IP20
IP00
IP00
326
1533
545
503
1506
540
503
1506
540
GX
HX
HX
176
294
294
Grado di protezione
Dimensioni
- larghezza
- altezza
- profondità
mm
mm
mm
Grandezza costruttiva
Peso approssimativo
kg
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
529
Dati tecnici
12.3 Dati tecnici
N. di ordinazione
6SL3310-
Fusibili raccomandati
- Protezione conduttori
senza protez. semiconduttori
Corrente nominale
A
Grandezza costruttiva secondo
IEC 60269
- Protezione conduttori e semiconduttori A
6)
Corrente nominale
Grandezza costruttiva secondo
IEC 60269
Corrente di cortocircuito minima 7)
A
1GF33-3AAx
1GF34-1AAx
1GF34-7AAx
3NA3365-6
500
3
3NE1334-2
500
2
3NA3365-6
500
3
3NE1334-2
500
2
3NA3252-6
2 x 315
2
3NE1435-2
560
3
5200
5200
6200
1)
Potenza nominale di un tipico motore asincrono standard a 6 poli su base IL o IH a 3 AC 50 Hz 500 V.
2)
Potenza nominale di un tipico motore asincrono standard a 6 poli su base IL o IH a 3 AC 60 Hz 575 V.
3)
La corrente di carico di base IL si basa su un ciclo di carico del 110 % per 60 s oppure del 150 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
4)
La corrente di carico di base IH si basa su un ciclo di carico del 150 % per 60 s oppure del 160 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
5)
Se l'alimentazione ausiliaria deve essere separata dall'alimentazione di carico, ad es. se la regolazione deve essere
ancora in grado di comunicare anche in assenza di tensione di rete.
6)
Per l'installazione di un sistema con approvazione UL sono assolutamente necessari i fusibili indicati.
7)
Corrente minima richiesta per l'intervento sicuro degli elementi di protezione previsti del tipo 3NE1.
Convertitori da incasso
530
Istruzioni operative, 04/2014, A5E00386872A
Dati tecnici
12.3 Dati tecnici
Tabella 12- 11
Power Module, 3 AC 500 ... 600 V, Parte 3
N. di ordinazione
6SL3310-
1GF35-8AAx
1GF37-4AAx
1GF38-1AAx
Potenza tipica
- con IL a 50 Hz, 500 V 1)
- con IH a 50 Hz, 500 V 1)
- con IL a 60 Hz, 575 V 2)
- con IH a 60 Hz, 575 V 2)
kW
kW
hp
hp
400
315
600
500
500
450
700
700
560
500
800
700
Corrente di uscita
- Corrente nominale IN
- Corrente di carico di base IL 3)
- Corrente di carico di base IH 4)
A
A
A
575
560
514
735
710
657
810
790
724
A
A
A
598
918
1,0
764
1164
1,25
842
1295
1,25
Corrente di ingresso
- Corrente di ingresso nominale
- Corrente di ingresso, max.
- Alimentazione ausiliaria di corrente
DC 24 V 5)
Tensioni di collegamento
- Tensione di rete
- Alimentazione dell'elettronica
- Tensione di uscita
VACeff
VDC
VACeff
3 AC 500 ... 600 V ±10 % (-15 % < 1 min)
24 (20,4 ... 28,8)
3 AC 0 ... tensione di rete
Potenza dissipata
kW
8,1
12,0
13,3
Aria di raffreddamento necessaria
m³/s
0,78
1,48
1,48
Lunghezza max. dei cavi
tra Power Module e motore
- schermato
- non schermato
m
m
300
450
300
450
300
450
Livello di pressione acustica
LpA (1 m) a 50/60 Hz
dB(A)
70/73
73/75
73/75
mm2
2 viti M12
4 x 240
3 viti M12
6 x 240
3 viti M12
6 x 240
2 viti M12
3 viti M12
3 viti M12
Collegamento alla rete (U1, V1, W1)
Sezione max. dei collegamenti (IEC)
Collegamento motore
(U2/T1, V2/T2, W2/T3)
Sezione max. dei collegamenti (IEC)
mm2
4 x 240
6 x 240
6 x 240
Collegamento PE1 / GND
Sezione max. dei collegamenti (IEC)
mm2
Vite M12
2 x 240
2 viti M12
4 x 240
2 viti M12
4 x 240
Collegamento PE2 / GND
Sezione max. dei collegamenti (IEC)
mm2
2 viti M12
4 x 240
3 viti M12
6 x 240
3 viti M12
6 x 240
IP00
IP00
IP00
503
1506
540
909
1510
540
909
1510
540
HX
JX
JX
294
530
530
Grado di protezione
Dimensioni
- larghezza
- altezza
- profondità
mm
mm
mm
Grandezza costruttiva
Peso approssimativo
kg
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
531
Dati tecnici
12.3 Dati tecnici
N. di ordinazione
6SL3310-
Fusibili raccomandati
- Protezione conduttori
senza protez. semiconduttori
Corrente nominale
A
Grandezza costruttiva secondo
IEC 60269
- Protezione conduttori e semiconduttori A
6)
Corrente nominale
Grandezza costruttiva secondo
IEC 60269
Corrente di cortocircuito minima 7)
A
1GF35-8AAx
1GF37-4AAx
1GF38-1AAx
3NA3354-6
2 x 355
3
3NE1447-2
670
3
3NA3365-6
2 x 500
3
3NE1448-2
850
3
3NA3365-6
2 x 500
3
3NE1434-2
2 x 500
2
8400
10500
10400
1)
Potenza nominale di un tipico motore asincrono standard a 6 poli su base IL o IH a 3 AC 50 Hz 500 V.
2)
Potenza nominale di un tipico motore asincrono standard a 6 poli su base IL o IH a 3 AC 60 Hz 575 V.
3)
La corrente di carico di base IL si basa su un ciclo di carico del 110 % per 60 s oppure del 150 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
4)
La corrente di carico di base IH si basa su un ciclo di carico del 150 % per 60 s oppure del 160 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
5)
Se l'alimentazione ausiliaria deve essere separata dall'alimentazione di carico, ad es. se la regolazione deve essere
ancora in grado di comunicare anche in assenza di tensione di rete.
6)
Per l'installazione di un sistema con approvazione UL sono assolutamente necessari i fusibili indicati.
7)
Corrente minima richiesta per l'intervento sicuro degli elementi di protezione previsti del tipo 3NE1.
Convertitori da incasso
532
Istruzioni operative, 04/2014, A5E00386872A
Dati tecnici
12.3 Dati tecnici
Power Module, 3 AC 660 ... 690 V
Tabella 12- 12
Power Module, 3 AC 660 ... 690 V, Parte 1
N. di ordinazione
6SL3310-
1GH28-5AAx
1GH31-0AAx
1GH31-2AAx
Potenza tipica
- con IL a 50 Hz, 690 V 1)
- con IH a 50 Hz, 690 V 1)
kW
kW
75
55
90
75
110
90
Corrente di uscita
- Corrente nominale IN
- Corrente di carico di base IL 2)
- Corrente di carico di base IH 3)
A
A
A
85
80
76
100
95
89
120
115
107
A
A
A
93
131
0,8
109
155
0,8
131
188
0,8
Corrente di ingresso
- Corrente di ingresso nominale
- Corrente di ingresso, max.
- Alimentazione ausiliaria di corrente
DC 24 V 4)
Tensioni di collegamento
- Tensione di rete
- Alimentazione dell'elettronica
- Tensione di uscita
VACeff
VDC
VACeff
3 AC 660 ... 690 V ±10 % (-15 % < 1 min)
24 (20,4 ... 28,8)
3 AC 0 ... tensione di rete
Potenza dissipata
kW
1,5
1,8
2,4
Aria di raffreddamento necessaria
m³/s
0,17
0,17
0,17
Lunghezza max. dei cavi
tra Power Module e motore
- schermato
- non schermato
m
m
300
450
300
450
300
450
Livello di pressione acustica
LpA (1 m) a 50/60 Hz
dB(A)
64/67
64/67
64/67
mm2
Vite M10
2 x 185
Vite M10
2 x 185
Vite M10
2 x 185
Vite M10
Vite M10
Vite M10
Collegamento alla rete (U1, V1, W1)
Sezione max. dei collegamenti (IEC)
Collegamento motore
(U2/T1, V2/T2, W2/T3)
Sezione max. dei collegamenti (IEC)
mm2
2 x 185
2 x 185
2 x 185
Collegamento PE1 / GND
Sezione max. dei collegamenti (IEC)
mm2
Vite M10
2 x 185
Vite M10
2 x 185
Vite M10
2 x 185
Collegamento PE2 / GND
Sezione max. dei collegamenti (IEC)
mm2
Vite M10
2 x 185
Vite M10
2 x 185
Vite M10
2 x 185
IP20
IP20
IP20
326
1400
356
326
1400
356
326
1400
356
FX
FX
FX
104
104
104
Grado di protezione
Dimensioni
- larghezza
- altezza
- profondità
mm
mm
mm
Grandezza costruttiva
Peso approssimativo
kg
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
533
Dati tecnici
12.3 Dati tecnici
N. di ordinazione
1GH28-5AAx
1GH31-0AAx
1GH31-2AAx
Fusibili raccomandati
- Protezione conduttori
senza protez. semiconduttori
Corrente nominale
A
Grandezza costruttiva secondo
IEC 60269
- Protezione conduttori e semiconduttori A
Corrente nominale
Grandezza costruttiva secondo
IEC 60269
6SL3310-
3NA3132-6
125
1
3NE1022-2
125
00
3NA3132-6
125
1
3NE1022-2
125
00
3NA3136-6
160
1
3NE1224-2
160
1
Corrente di cortocircuito minima 5)
1050
1050
1200
A
1)
Potenza nominale di un tipico motore asincrono standard a 6 poli su base IL o IH a 3 AC 50 Hz 690 V.
2)
La corrente di carico di base IL si basa su un ciclo di carico del 110 % per 60 s oppure del 150 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
3)
La corrente di carico di base IH si basa su un ciclo di carico del 150 % per 60 s oppure del 160 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
4)
Se l'alimentazione ausiliaria deve essere separata dall'alimentazione di carico, ad es. se la regolazione deve essere
ancora in grado di comunicare anche in assenza di tensione di rete.
5)
Corrente minima richiesta per l'intervento sicuro degli elementi di protezione previsti del tipo 3NE1.
Convertitori da incasso
534
Istruzioni operative, 04/2014, A5E00386872A
Dati tecnici
12.3 Dati tecnici
Tabella 12- 13
Power Module, 3 AC 660 ... 690 V, Parte 2
N. di ordinazione
6SL3310-
1GH31-5AAx
1GH31-8AAx
1GH32-2AAx
Potenza tipica
- con IL a 50 Hz, 690 V 1)
- con IH a 50 Hz, 690 V 1)
kW
kW
132
110
160
132
200
160
Corrente di uscita
- Corrente nominale IN
- Corrente di carico di base IL 2)
- Corrente di carico di base IH 3)
A
A
A
150
142
134
175
171
157
215
208
192
A
A
A
164
232
0,8
191
279
0,9
224
341
0,9
Corrente di ingresso
- Corrente di ingresso nominale
- Corrente di ingresso, max.
- Alimentazione ausiliaria di corrente
DC 24 V 4)
Tensioni di collegamento
- Tensione di rete
- Alimentazione dell'elettronica
- Tensione di uscita
VACeff
VDC
VACeff
Potenza dissipata
kW
2,5
3,8
4,8
Aria di raffreddamento necessaria
m³/s
0,17
0,36
0,36
Lunghezza max. dei cavi
tra Power Module e motore
- schermato
- non schermato
m
m
300
450
300
450
300
450
Livello di pressione acustica
LpA (1 m) a 50/60 Hz
dB(A)
64/67
69/73
69/73
Collegamento alla rete (U1, V1, W1)
Sezione max. dei collegamenti (IEC)
mm2
Vite M10
2 x 185
Vite M10
2 x 240
Vite M10
2 x 240
Vite M10
Vite M10
Vite M10
mm2
2 x 185
2 x 240
2 x 240
Collegamento PE1 / GND
Sezione max. dei collegamenti (IEC)
mm2
Vite M10
2 x 185
Vite M10
2 x 240
Vite M10
2 x 240
Collegamento PE2 / GND
Sezione max. dei collegamenti (IEC)
mm2
Vite M10
2 x 185
Vite M10
2 x 240
Vite M10
2 x 240
IP20
IP20
IP20
326
1400
356
326
1533
545
326
1533
545
FX
GX
GX
104
176
176
Collegamento motore
(U2/T1, V2/T2, W2/T3)
Sezione max. dei collegamenti (IEC)
Grado di protezione
Dimensioni
- larghezza
- altezza
- profondità
mm
mm
mm
Grandezza costruttiva
Peso approssimativo
kg
3 AC 660 ... 690 V ±10 % (-15 % < 1 min)
24 (20,4 ... 28,8)
3 AC 0 ... tensione di rete
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
535
Dati tecnici
12.3 Dati tecnici
N. di ordinazione
1GH31-5AAx
1GH31-8AAx
1GH32-2AAx
Fusibili raccomandati
- Protezione conduttori
senza protez. semiconduttori
Corrente nominale
A
Grandezza costruttiva secondo
IEC 60269
- Protezione conduttori e semiconduttori A
Corrente nominale
Grandezza costruttiva secondo
IEC 60269
6SL3310-
3NA3240-6
200
2
3NE1225-2
200
1
3NA3244-6
250
2
3NE1227-2
250
1
3NA3252-6
315
2
3NE1230-2
315
1
Corrente di cortocircuito minima 5)
1600
2400
3000
A
1)
Potenza nominale di un tipico motore asincrono standard a 6 poli su base IL o IH a 3 AC 50 Hz 690 V.
2)
La corrente di carico di base IL si basa su un ciclo di carico del 110 % per 60 s oppure del 150 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
3)
La corrente di carico di base IH si basa su un ciclo di carico del 150 % per 60 s oppure del 160 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
4)
Se l'alimentazione ausiliaria deve essere separata dall'alimentazione di carico, ad es. se la regolazione deve essere
ancora in grado di comunicare anche in assenza di tensione di rete.
5)
Corrente minima richiesta per l'intervento sicuro degli elementi di protezione previsti del tipo 3NE1.
Convertitori da incasso
536
Istruzioni operative, 04/2014, A5E00386872A
Dati tecnici
12.3 Dati tecnici
Tabella 12- 14
Power Module, 3 AC 660 ... 690 V, Parte 3
N. di ordinazione
6SL3310-
1GH32-6AAx
1GH33-3AAx
1GH34-1AAx
Potenza tipica
- con IL a 50 Hz, 690 V 1)
- con IH a 50 Hz, 690 V 1)
kW
kW
250
200
315
250
400
315
Corrente di uscita
- Corrente nominale IN
- Corrente di carico di base IL 2)
- Corrente di carico di base IH 3)
A
A
A
260
250
233
330
320
280
410
400
367
A
A
A
270
410
0,9
343
525
0,9
426
655
1,0
Corrente di ingresso
- Corrente di ingresso nominale
- Corrente di ingresso, max.
- Alimentazione ausiliaria di corrente
DC 24 V 4)
Tensioni di collegamento
- Tensione di rete
- Alimentazione dell'elettronica
- Tensione di uscita
VACeff
VDC
VACeff
Potenza dissipata
kW
5,0
5,8
7,5
Aria di raffreddamento necessaria
m³/s
0,36
0,36
0,78
Lunghezza max. dei cavi
tra Power Module e motore
- schermato
- non schermato
m
m
300
450
300
450
300
450
Livello di pressione acustica
LpA (1 m) a 50/60 Hz
dB(A)
69/73
69/73
70/73
Collegamento alla rete (U1, V1, W1)
Sezione max. dei collegamenti (IEC)
mm2
Vite M10
2 x 240
Vite M10
2 x 240
2 viti M12
4 x 240
Vite M10
Vite M10
2 viti M12
mm2
2 x 240
2 x 240
4 x 240
Collegamento PE1 / GND
Sezione max. dei collegamenti (IEC)
mm2
Vite M10
2 x 240
Vite M10
2 x 240
Vite M12
2 x 240
Collegamento PE2 / GND
Sezione max. dei collegamenti (IEC)
mm2
Vite M10
2 x 240
Vite M10
2 x 240
2 viti M12
4 x 240
IP20
IP20
IP00
326
1533
545
326
1533
545
503
1506
540
GX
GX
HX
176
176
294
Collegamento motore
(U2/T1, V2/T2, W2/T3)
Sezione max. dei collegamenti (IEC)
Grado di protezione
Dimensioni
- larghezza
- altezza
- profondità
mm
mm
mm
Grandezza costruttiva
Peso approssimativo
kg
3 AC 660 ... 690 V ±10 % (-15 % < 1 min)
24 (20,4 ... 28,8)
3 AC 0 ... tensione di rete
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
537
Dati tecnici
12.3 Dati tecnici
N. di ordinazione
1GH32-6AAx
1GH33-3AAx
1GH34-1AAx
Fusibili raccomandati
- Protezione conduttori
senza protez. semiconduttori
Corrente nominale
A
Grandezza costruttiva secondo
IEC 60269
- Protezione conduttori e semiconduttori A
Corrente nominale
Grandezza costruttiva secondo
IEC 60269
6SL3310-
3NA3354-6
355
3
3NE1331-2
350
2
3NA3365-6
500
3
3NE1334-2
500
2
3NA3365-6
500
3
3NE1334-2
500
2
Corrente di cortocircuito minima 5)
3600
5200
5200
A
1)
Potenza nominale di un tipico motore asincrono standard a 6 poli su base IL o IH a 3 AC 50 Hz 690 V.
2)
La corrente di carico di base IL si basa su un ciclo di carico del 110 % per 60 s oppure del 150 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
3)
La corrente di carico di base IH si basa su un ciclo di carico del 150 % per 60 s oppure del 160 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
4)
Se l'alimentazione ausiliaria deve essere separata dall'alimentazione di carico, ad es. se la regolazione deve essere
ancora in grado di comunicare anche in assenza di tensione di rete.
5)
Corrente minima richiesta per l'intervento sicuro degli elementi di protezione previsti del tipo 3NE1.
Convertitori da incasso
538
Istruzioni operative, 04/2014, A5E00386872A
Dati tecnici
12.3 Dati tecnici
Tabella 12- 15
Power Module, 3 AC 660 ... 690 V, Parte 4
N. di ordinazione
6SL3310-
1GH34-7AAx
1GH35-8AAx
1GH37-4AAx
Potenza tipica
- con IL a 50 Hz, 690 V 1)
- con IH a 50 Hz, 690 V 1)
kW
kW
450
400
560
500
710
560
Corrente di uscita
- Corrente nominale IN
- Corrente di carico di base IL 2)
- Corrente di carico di base IH 3)
A
A
A
465
452
416
575
560
514
735
710
657
A
A
A
483
740
1,0
598
918
1,0
764
1164
1,25
Corrente di ingresso
- Corrente di ingresso nominale
- Corrente di ingresso, max.
- Alimentazione ausiliaria di corrente
DC 24 V 4)
Tensioni di collegamento
- Tensione di rete
- Alimentazione dell'elettronica
- Tensione di uscita
VACeff
VDC
VACeff
Potenza dissipata
kW
8,5
10,3
12,8
Aria di raffreddamento necessaria
m³/s
0,78
0,78
1,48
Lunghezza max. dei cavi
tra Power Module e motore
- schermato
- non schermato
m
m
300
450
300
450
300
450
Livello di pressione acustica
LpA (1 m) a 50/60 Hz
dB(A)
70/73
70/73
73/75
Collegamento alla rete (U1, V1, W1)
Sezione max. dei collegamenti (IEC)
mm2
2 viti M12
4 x 240
2 viti M12
4 x 240
3 viti M12
6 x 240
2 viti M12
2 viti M12
3 viti M12
mm2
4 x 240
4 x 240
6 x 240
Collegamento PE1 / GND
Sezione max. dei collegamenti (IEC)
mm2
Vite M12
2 x 240
Vite M12
2 x 240
2 viti M12
4 x 240
Collegamento PE2 / GND
Sezione max. dei collegamenti (IEC)
mm2
2 viti M12
4 x 240
2 viti M12
4 x 240
3 viti M12
6 x 240
IP00
IP00
IP00
503
1506
540
503
1506
540
909
1510
540
HX
HX
JX
294
294
530
Collegamento motore
(U2/T1, V2/T2, W2/T3)
Sezione max. dei collegamenti (IEC)
Grado di protezione
Dimensioni
- larghezza
- altezza
- profondità
mm
mm
mm
Grandezza costruttiva
Peso approssimativo
kg
3 AC 660 ... 690 V ±10 % (-15 % < 1 min)
24 (20,4 ... 28,8)
3 AC 0 ... tensione di rete
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
539
Dati tecnici
12.3 Dati tecnici
N. di ordinazione
1GH34-7AAx
1GH35-8AAx
1GH37-4AAx
Fusibili raccomandati
- Protezione conduttori
senza protez. semiconduttori
Corrente nominale
A
Grandezza costruttiva secondo
IEC 60269
- Protezione conduttori e semiconduttori A
Corrente nominale
Grandezza costruttiva secondo
IEC 60269
6SL3310-
3NA3252-6
2 x 315
2
3NE1435-2
560
3
3NA3354-6
2 x 355
3
3NE1447-2
670
3
3NA3365-6
2 x 500
3
3NE1448-2
850
3
Corrente di cortocircuito minima 5)
6200
8400
10500
A
1)
Potenza nominale di un tipico motore asincrono standard a 6 poli su base IL o IH a 3 AC 50 Hz 690 V.
2)
La corrente di carico di base IL si basa su un ciclo di carico del 110 % per 60 s oppure del 150 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
3)
La corrente di carico di base IH si basa su un ciclo di carico del 150 % per 60 s oppure del 160 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
4)
Se l'alimentazione ausiliaria deve essere separata dall'alimentazione di carico, ad es. se la regolazione deve essere
ancora in grado di comunicare anche in assenza di tensione di rete.
5)
Corrente minima richiesta per l'intervento sicuro degli elementi di protezione previsti del tipo 3NE1.
Convertitori da incasso
540
Istruzioni operative, 04/2014, A5E00386872A
Dati tecnici
12.3 Dati tecnici
Tabella 12- 16
Power Module, 3 AC 660 ... 690 V, Parte 5
N. di ordinazione
6SL3310-
1GH38-1AAx
Potenza tipica
- con IL a 50 Hz, 690 V 1)
- con IH a 50 Hz, 690 V 1)
kW
kW
800
710
Corrente di uscita
- Corrente nominale IN
- Corrente di carico di base IL 2)
- Corrente di carico di base IH 3)
A
A
A
810
790
724
A
A
A
842
1295
1,25
Corrente di ingresso
- Corrente di ingresso nominale
- Corrente di ingresso, max.
- Alimentazione ausiliaria di corrente
DC 24 V 4)
Tensioni di collegamento
- Tensione di rete
- Alimentazione dell'elettronica
- Tensione di uscita
VACeff
VDC
VACeff
Potenza dissipata
kW
13,9
Aria di raffreddamento necessaria
m³/s
1,48
Lunghezza max. dei cavi
tra Power Module e motore
- schermato
- non schermato
m
m
300
450
Livello di pressione acustica
LpA (1 m) a 50/60 Hz
dB(A)
73/75
Collegamento alla rete (U1, V1, W1)
Sezione max. dei collegamenti (IEC)
mm2
3 viti M12
6 x 240
3 AC 660 ... 690 V ±10 % (-15 % < 1 min)
24 (20,4 ... 28,8)
3 AC 0 ... tensione di rete
Collegamento motore
(U2/T1, V2/T2, W2/T3)
Sezione max. dei collegamenti (IEC)
3 viti M12
mm2
6 x 240
Collegamento PE1 / GND
Sezione max. dei collegamenti (IEC)
mm2
2 viti M12
4 x 240
Collegamento PE2 / GND
Sezione max. dei collegamenti (IEC)
mm2
3 viti M12
6 x 240
Grado di protezione
Dimensioni
- larghezza
- altezza
- profondità
IP00
mm
mm
mm
Grandezza costruttiva
Peso approssimativo
909
1510
540
JX
kg
530
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
541
Dati tecnici
12.3 Dati tecnici
N. di ordinazione
6SL3310-
1GH38-1AAx
Fusibili raccomandati
- Protezione conduttori
senza protez. semiconduttori
Corrente nominale
A
Grandezza costruttiva secondo
IEC 60269
- Protezione conduttori e semiconduttori A
Corrente nominale
Grandezza costruttiva secondo
IEC 60269
3NA3365-6
2 x 500
3
3NE1334-2
2 x 500
2
Corrente di cortocircuito minima 5)
10400
A
1)
Potenza nominale di un tipico motore asincrono standard a 6 poli su base IL o IH a 3 AC 50 Hz 690 V.
2)
La corrente di carico di base IL si basa su un ciclo di carico del 110 % per 60 s oppure del 150 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
3)
La corrente di carico di base IH si basa su un ciclo di carico del 150 % per 60 s oppure del 160 % per 10 s con una
durata del ciclo di 300 s (vedere il capitolo "Sovraccaricabilità").
4)
Se l'alimentazione ausiliaria deve essere separata dall'alimentazione di carico, ad es. se la regolazione deve essere
ancora in grado di comunicare anche in assenza di tensione di rete.
5)
Corrente minima richiesta per l'intervento sicuro degli elementi di protezione previsti del tipo 3NE1.
Convertitori da incasso
542
Istruzioni operative, 04/2014, A5E00386872A
Dati tecnici
12.3 Dati tecnici
12.3.2
Control Unit CU320-2 DP e CU320-2 PN
Tabella 12- 17
CU320-2 DP, CU320-2 PN
Max. assorbimento di corrente (a DC 24 V)
senza considerare le uscite digitali e l'Option Slot di
ampliamento
1,0 A
Sezione max. collegabile
2,5 mm2
Ingressi digitali
12 ingressi digitali con separazione di potenziale
8 ingressi/uscite digitali bidirezionali senza separazione di
potenziale
Tensione
-3 ... +30 V
Livello Low
(un ingresso digitale aperto viene interpretato come "Low")
-3 ... +5 V
Livello High
15 ... 30 V
Corrente assorbita
(tip. a DC 24 V)
9 mA
Sezione max. collegabile
1,5 mm2
Uscite digitali (resistenti a cortocircuito permanente)
8 ingressi/uscite digitali bidirezionali senza separazione di
potenziale
Tensione
DC 24 V
Corrente di carico max. per uscita digitale
500 mA
Sezione max. collegabile
1,5 mm2
Potenza dissipata
24 W
Connessione PE
sulla custodia con vite M5
Connessione di massa
sulla custodia con vite M5
Larghezza
50 mm
Altezza
300 mm
Profondità
226 mm
Peso approssimativo
2,3 kg
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
543
Dati tecnici
12.3 Dati tecnici
12.3.3
Terminal Module TM31
Tabella 12- 18
Dati tecnici TM31
Max. fabbisogno di corrente (a DC 24V) senza considerare
le uscite digitali
0,5 A
Sezione max. collegabile
2,5 mm2
Ingressi digitali
Tensione
-3 ... 30 V
Livello Low
(un ingresso digitale aperto viene interpretato come "Low")
-3 ... 5 V
Livello High
15 ... 30 V
Max. fabbisogno di corrente (tip. a DC 24 V)
10 mA
Tempi di commutazione del segnale degli ingressi digitali
L -> H: 50 µs
H -> L: 100 µs
Sezione max. collegabile
1,5 mm2
Uscite digitali (resistenti a cortocircuito permanente)
Tensione
DC 24 V
Corrente di carico max. per uscita digitale
Alimentazione esterna/interna 24 V
100 mA / 20 mA
Sezione max. collegabile
1,5 mm2
Ingressi analogici (commutazione tra ingresso di tensione e di corrente tramite interruttore)
Come ingresso di tensione
- Campo di tensione
-10 ... 10 V
- Resistenza interna Ri
70 kΩ
Come ingresso di corrente
- Campo di corrente
4 ... 20 mA, -20 ... 20 mA, 0 ... 20 mA
- Resistenza interna Ri
250 Ω
- Risoluzione
12 bit
Sezione max. collegabile
1,5 mm2
Uscite analogiche (resistenti a cortocircuito permanente)
Campo di tensione
-10 ... 10 V
Corrente di carico max.
-3 ... 3 mA
Campo di corrente
4 ... 20 mA, -20 ... 20 mA, 0 ... 20 mA
Resistenza di carico max.
500 Ω per uscite nel campo -20 … 20 mA
Risoluzione
12 bit
Sezione max. collegabile
1,5 mm2
Uscite a relè (contatti di scambio)
Corrente di carico max.
8A
Tensione di commutazione max.
AC 250 V, DC 30 V
Max. potenza di commutazione
(con AC 250 V)
2000 VA
Max. potenza di commutazione
(con DC 30 V)
240 W (carico ohmico)
Corrente minima necessaria
100 mA
Convertitori da incasso
544
Istruzioni operative, 04/2014, A5E00386872A
Dati tecnici
12.3 Dati tecnici
Sezione max. collegabile
2,5 mm2
Potenza dissipata
< 10 W
Connessione PE
Sulla custodia con vite M4
Larghezza
50 mm
Altezza
150 mm
Profondità
119 mm
Peso approssimativo
0,87 kg
12.3.4
Sensor Module SMC30
Tabella 12- 19
Dati tecnici SMC30
Alimentazione dell'elettronica
Tensione
DC 24 V (20,4 ... 28,8)
Corrente
max. 0,6 A
Temperatura ambiente max. fino a un'altitudine di 2000 m
55 °C
Nota: A partire da un’altitudine di 2000 m, la temperatura ambiente max. si riduce di 7 °C ogni 1000 m.
Connessione PE/massa
Sulla custodia con vite M4 / 1,8 Nm
Peso
0,45 kg
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
545
Dati tecnici
12.3 Dati tecnici
Convertitori da incasso
546
Istruzioni operative, 04/2014, A5E00386872A
A
Appendice
A.1
Indice delle abbreviazioni
A
A...
Avvertenza
AC
Corrente alternata
AI
Ingresso analogico
AO
Uscita analogica
AOP
Advanced Operator Panel – pannello operativo con visualizzazione del
testo in chiaro
B
BI
Ingresso binettore
BICO
Binettore / connettore
BO
Uscita binettore
C
C
Capacità
CAN
Sistema di bus seriale
CB
Unità di comunicazione
CDS
Record di dati di comando
CI
Ingresso connettore
COM
Contatto intermedio di un contatto di commutazione
CU
Control Unit
D
DC
Corrente continua
DDS
Record di dati di azionamento
DI
Ingresso digitale
DI/DO
Ingresso/uscita digitale bidirezionale
DO
Uscita digitale
E
ESD
Componenti a rischio elettrostatico
EMC
Compatibilità elettromagnetica
EN
Norma europea
F
F ...
Anomalia
FAQ
Domande frequenti
FW
Firmware
H
HLG
Generatore di rampa
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
547
Appendice
A.1 Indice delle abbreviazioni
HW
Hardware
I
I/O
Ingresso/uscita
IEC
Normativa internazionale per l'elettrotecnica
IGBT
Transistor bipolare con elettrodo di comando isolato
J
JOG
Funzionamento a impulsi
L
L
Induttanza
LED
Diodo luminoso
M
M
Massa
MDS
Record di dati motore
N
NC
Contatto NC (normalmente chiuso)
NEMA
Comitato normative USA (United States of America)
NO
Contatto NA (normalmente aperto)
P
p ...
Parametro di impostazione
PDS
Record di dati parte di potenza
PE
Terra di protezione
PROFIBUS
Bus dati seriale
PTC
Coefficiente di temperatura positivo
R
r ...
Parametro di supervisione (solo lettura)
RAM
Memoria di lettura e scrittura
RS232
Interfaccia seriale
RS485
Norma. Descrive le caratteristiche fisiche di un'interfaccia seriale digitale.
S
SI
Safety Integrated
STW
Parola di comando PROFIdrive
SW
Software
T
TIA
Totally Integrated Automation
TM
Terminal Module
U
UL
Underwriters Laboratories Inc.
V
Vdc
Tensione del circuito intermedio
Z
ZSW
Parola di stato PROFIdrive
Convertitori da incasso
548
Istruzioni operative, 04/2014, A5E00386872A
Appendice
A.2 Macro dei parametri
A.2
Macro dei parametri
Macro parametri p0015 = apparecchio da incasso G130
Con questa macro si effettuano le preimpostazioni per il funzionamento dell'apparecchio da
incasso.
Tabella A- 1 Macro parametri p0015 = apparecchio da incasso G130
Ricevitore
Parametri
p0400[0]
Descrizione
Selezione tipo encoder
Sorgente
DO
Vector
Parametri
9999
Descrizione
Definito dall'utente
DO
Vector
p0404[0]
Configurazione encoder
Vector
200008h
p0405[0]
Encoder di segnali rettangolare, traccia A/B
Vector
9h
Bipolare, come traccia
A/B
Vector
Vector
p0408[0]
Numero tacche encoder
Vector
1024
1024 tacche per ogni
ambiente
Vector
p0420[0]
Collegamento encoder
Vector
0x2
Collegamento encoder Vector
= morsetto
p0500
Applicazione tecnologica
Vector
1
Pompe, ventilatori
Vector
p0600
Sensore della temperatura motore per
sorveglianza
Vector
0
Nessun sensore
Vector
p0601
Sensore della temperatura motore, tipo di
sensore
Vector
0
Nessun sensore
Vector
p0603[0]
CI: Temperatura motore
Vector
r4105
Sensore su TM31
TM31
p0604
Temperatura del motore, soglia di avviso
Vector
120
120 °C
Vector
p0605
Sovratemperatura motore, soglia di anomalia
Vector
155
155 °C
Vector
p0606
Temperatura motore, temporizzatore
Vector
0
0s
Vector
p0610
Sovratemperatura motore, reazione in caso di
superamento
Vector
1
Avviso con riduzione di Vector
I_max e anomalia
p0700[0]
Preimpostazione ingresso binettore
Vector
70001
PROFIdrive
p0864
Funzionamento alimentatore
Vector
1
p1000[0]
Preimpostazione ingresso connettore
Vector
100001
PROFIdrive
Vector
p1001
CO: Valore di riferimento fisso del numero di
giri 1
Vector
300
300 1/min
Vector
p1002
CO: Valore di riferimento fisso del numero di
giri 2
Vector
600
600 1/min
Vector
p1003
CO: Valore di riferimento fisso del numero di
giri 3
Vector
1500
1500 1/min
Vector
p1083
CO: Limite del numero di giri, senso di
rotazione positivo
Vector
6000
6000 1/min
Vector
p1086
CO: Limite del numero di giri, senso di
rotazione negativo
Vector
-6000
-6000 1/min
Vector
p1115
Selezione generatore di rampa
Vector
1
Generatore di rampa
esteso
Vector
p1120
Generatore di rampa, tempo di accelerazione
Vector
20
20 s
Vector
Vector
Vector
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
549
Appendice
A.2 Macro dei parametri
Ricevitore
Parametri
Descrizione
Sorgente
DO
p1121
Generatore di rampa, tempo di decelerazione
Vector
p1135
OFF3 Tempo di decelerazione
Vector
p1200
Riavviamento al volo, modo operativo
Vector
p1240
Configurazione del regolatore Vdc
Vector
p1254
Regolatore Vdc, acquisizione automatica livello
ON
p1280
Parametri
30
Descrizione
DO
30 s
Vector
10
10 s
Vector
0
Riavviamento al volo
non attivo
Vector
1
Regolatore Vdc-max
abilitato
Vector
Vector
1
Acquisizione
automatica abilitata
Vector
Regolatore Vdc, configurazione (U/f)
Vector
1
Regolatore Vdc-max
abilitato
Vector
p1300
Modalità operativa di controllo/regolazione
Vector
20
Regolazione del
numero di giri senza
encoder
Vector
p1911
Numero di fasi da identificare
Vector
3
3 fasi
Vector
p2051[0]
CI: PROFIBUS Invio PZD formato parola
Vector
r2089[0]
ZSW1
Vector
p2051[1]
CI: PROFIBUS Invio PZD formato parola
Vector
r0063[0]
n attuale non livellato
Vector
p2051[2]
CI: PROFIBUS Invio PZD formato parola
Vector
r0068[0]
I attuale non livellato
Vector
p2051[3]
CI: PROFIBUS Invio PZD formato parola
Vector
r0080[0]
M attuale non livellato
Vector
p2051[4]
CI: PROFIBUS Invio PZD formato parola
Vector
r0082[0]
P attuale non livellato
Vector
p2051[5]
CI: PROFIBUS Invio PZD formato parola
Vector
r2131
FAULT
Vector
p2080[0]
BI: PROFIBUS invio ZSW1
Vector
r0899.0
Pronto all'inserzione
Vector
p2080[1]
BI: PROFIBUS invio ZSW1
Vector
r0899.1
Pronto al
funzionamento
Vector
p2080[2]
BI: PROFIBUS invio ZSW1
Vector
r0899.2
Esercizio
Vector
p2080[3]
BI: PROFIBUS invio ZSW1
Vector
r2139.3
Anomalia
Vector
p2080[4]
BI: PROFIBUS invio ZSW1
Vector
r0899.4
Nessun OFF2
Vector
p2080[5]
BI: PROFIBUS invio ZSW1
Vector
r0899.5
Nessun OFF3
Vector
p2080[6]
BI: PROFIBUS invio ZSW1
Vector
r0899.6
Blocco inserzione
Vector
p2080[7]
BI: PROFIBUS invio ZSW1
Vector
r2139.7
Avviso attivo
Vector
p2080[8]
BI: PROFIBUS invio ZSW1
Vector
r2197.7
Nessuno scostamento
valore di riferimentoattuale
Vector
p2080[9]
BI: PROFIBUS invio ZSW1
Vector
r0899.9
Gestione richiesta
Vector
p2080[10]
BI: PROFIBUS invio ZSW1
Vector
r2199.1
Raggiunto il valore di
confronto
Vector
p2080[11]
BI: PROFIBUS invio ZSW1
Vector
r1407.7
Limitazione M/I/P non
attiva
Vector
p2080[12]
BI: PROFIBUS invio ZSW1
Vector
0
p2080[13]
BI: PROFIBUS invio ZSW1
Vector
r2129.14
Nessun avviso
surriscaldamento
motore
Vector
p2080[14]
BI: PROFIBUS invio ZSW1
Vector
r2197.3
Rotazione destrorsa
Vector
Vector
Convertitori da incasso
550
Istruzioni operative, 04/2014, A5E00386872A
Appendice
A.2 Macro dei parametri
Ricevitore
Parametri
Sorgente
Descrizione
DO
Parametri
Descrizione
DO
p2080[15]
BI: PROFIBUS invio ZSW1
Vector
r2129.15
Nessun avviso
Vector
surriscaldamento parte
di potenza
p2088
Inversione parola di stato PROFIBUS bit per bit
Vector
B800h
p2128[14]
Selezione codice di anomalia/avviso per trigger
Vector
7910
A7910: Avviso di
surriscaldamento
motore
p2128[15]
Selezione codice di anomalia/avviso per trigger
Vector
5000
A5000: Avviso term.
Vector
surriscaldamento parte
di potenza
p2153
Costante di tempo filtro valore numero di giri
attuale
Vector
20
20 ms
Vector
p4053[0]
Ingressi analogici, costante di tempo di
livellamento (TM31)
TM31
0
0 ms
TM31
Vector
Vector
p4056[0]
Tipo ingressi analogici
TM31
0
Tensione 0...10 V
TM31
p4056[1]
Tipo ingressi analogici
TM31
0
Tensione 0...10 V
TM31
p4076 [0]
Tipo uscite analogiche
TM31
1
Tensione 0...10 V
TM31
p4076 [1]
Tipo uscite analogiche
TM31
1
Tensione 0...10 V
TM31
p4071[0]
Segnale uscita analogica 0
TM31
r0063
Valore attuale del
numero di giri livellato
Vector
p4071[1]
Segnale uscita analogica 1
TM31
r0068
Valore attuale di
corrente
Vector
p4100
Tipo di sensore termico
TM31
0
Analisi disattivata
TM31
p4102[0]
Soglia di avviso rilevamento temperatura
TM31
251 °C
In caso di
superamento viene
emesso l'avviso
A35211.
TM31
p4102[1]
Soglia di anomalia rilevamento temperatura
TM31
251 °C
In caso di
superamento viene
emessa l'anomalia
F35207.
TM31
p7003
Sistema di avvolgimento
Vector
1
Sistemi di
avvolgimento separati
Vector
Macro dei parametri p0700 = 1: PROFIdrive (70001)
Con questa macro viene impostata come sorgente dei comandi l'interfaccia PROFIdrive.
Tabella A- 2 Macro dei parametri p0700 = 1: PROFIdrive
Ricevitore
Parametri
Descrizione
Sorgente
DO
Parametri
Descrizione
DO
p0840[0]
ON/OFF1
Vector
r2090.0
PZD 1 bit 0
Vector
p0844[0]
Nessun OFF2_1
Vector
r2090.1
PZD 1 bit 1
Vector
p0845[0]
Nessun OFF2_2
Vector
r0722.4
CU DI4
CU
p0848[0]
Nessun OFF3_1
Vector
r2090.2
PZD 1 bit 2
Vector
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
551
Appendice
A.2 Macro dei parametri
Ricevitore
Parametri
Descrizione
Sorgente
DO
Parametri
Descrizione
DO
p0849[0]
Nessun OFF3_2
Vector
r0722.5
CU DI5
CU
p0806
Blocco modo LOCALE
Vector
0
Vector
p0810
Commutazione CDS bit 0
Vector
0
Vector
p0852
Abilitazione funzionamento
Vector
r2090.3
PZD 1 bit 3
Vector
p0854
Gestione richiesta
Vector
r2090.10
PZD 1 bit 10
Vector
p0922
Selezione telegramma PZD
Profibus
Vector
999
Progettazione telegrammi libera
p1020
FSW bit 0
Vector
0
Vector
p1021
FSW bit 1
Vector
0
Vector
p1035
MOP più alto
Vector
r2090.13
PZD 1 bit 13
Vector
p1036
MOP più basso
Vector
r2090.14
PZD 1 bit 14
Vector
p1113
Inversione del senso di rotazione
Vector
r2090.11
PZD 1 bit 11
Vector
p1140
Abilitazione generatore di rampa
Vector
r2090.4
PZD 1 bit 4
Vector
p1141
Avvia generatore di rampa
Vector
r2090.5
PZD 1 bit 5
Vector
p1142
Abilitazione n rif
Vector
r2090.6
PZD 1 bit 6
Vector
p2103
Tacitazione anomalia 1
Vector
r2090.7
PZD 1 bit 7
Vector
p2104
Tacitazione anomalia 2
Vector
r0722.3
CU DI3
CU
p2106
Anomalia esterna_1
Vector
r0722.6
CU DI6
CU
p2107
Anomalia esterna_2
Vector
1
p2112
Avviso esterno_1
Vector
r0722.11
p2116
Avviso esterno_2
Vector
1
p0738
DI/DO8
CU
r0899.11
Impulsi abilitati
p0748.8
Inversione DI/DO8
CU
0
Non invertito
p0728.8
Impostazione ingresso o uscita
DI/DO8
CU
1
Uscita
p0739
DI/DO9
CU
r2139.3
Anomalia attiva
p0748.9
Inversione DI/DO9
CU
1
Invertito
p0728.9
Impostazione ingresso o uscita
DI/DO9
CU
1
Uscita
p0740
DI/DO10
CU
1
+24 V
p0748.10
Inversione DI/DO10
CU
0
Non invertito
p0728.10
Impostazione ingresso o uscita
DI/DO10
CU
1
Uscita
p0741
DI/DO11
CU
0
p0748.11
Inversione DI/DO11
CU
0
Non invertito
p0728.11
Impostazione ingresso o uscita
DI/DO11
CU
0
Ingresso
p0742
DI/DO12
CU
r2138.7
Conf. Anomalia
p0748.12
Inversione DI/DO12
CU
0
Non invertito
p0728.12
Impostazione ingresso o uscita
DI/DO12
CU
1
Uscita
p0743
DI/DO13
CU
1
+24 V
Vector
CU DI11
CU
Vector
Vector
Vector
CU
CU
Vector
CU
Convertitori da incasso
552
Istruzioni operative, 04/2014, A5E00386872A
Appendice
A.2 Macro dei parametri
Ricevitore
Parametri
Descrizione
Sorgente
DO
Parametri
Descrizione
p0748.13
Inversione DI/DO13
CU
0
Non invertito
p0728.13
Impostazione ingresso o uscita
DI/DO13
CU
1
Uscita
p0744
DI/DO14
CU
1
+24 V
p0748.14
Inversione DI/DO14
CU
0
Non invertito
p0728.14
Impostazione ingresso o uscita
DI/DO14
CU
1
Uscita
p0745
DI/DO15
CU
1
+24 V
p0748.15
Inversione DI/DO15
CU
0
Non invertito
p0728.15
Impostazione ingresso o uscita
DI/DO15
CU
1
Uscita
DO
CU
CU
Macro dei parametri p0700 = 2: Morsetti TM31 (70002)
Con questa macro si imposta la morsettiera TM31 come sorgente di comando.
Tabella A- 3 Macro dei parametri p0700 = 2: Morsetti TM31
Ricevitore
Parametri
Descrizione
Sorgente
DO
Parametri
p0840[0]
ON/OFF1
Vector
r4022.0
p0844[0]
Nessun OFF2_1
Vector
1
p0845[0]
Nessun OFF2_2
Vector
r4022.4
p0848[0]
Nessun OFF3_1
Vector
1
p0849[0]
Nessun OFF3_2
Vector
r4022.5
p0806
Blocco modo LOCALE
Vector
0
Descrizione
TM31 DI0
DO
TM31
Vector
TM31 DI4
TM31
Vector
TM31 DI5
TM31
Vector
p0810
Commutazione CDS bit 0
Vector
0
Vector
p0852
Abilitazione funzionamento
Vector
1
Vector
p0854
Gestione richiesta
Vector
1
Vector
p0922
Selezione telegramma PZD
Profibus
Vector
999
Progettazione telegrammi
libera
p1020
FSW bit 0
Vector
r4022.1
TM31 DI1
TM31
p1021
FSW bit 1
Vector
r4022.2
TM31 DI2
TM31
p1035
MOP più alto
Vector
r4022.1
TM31 DI1
TM31
p1036
MOP più basso
Vector
r4022.2
TM31 DI2
TM31
p1113
Inversione del senso di rotazione
Vector
0
Vector
p1140
Abilitazione generatore di rampa
Vector
1
Vector
p1141
Avvia generatore di rampa
Vector
1
Vector
p1142
Abilitazione n rif
Vector
1
Vector
p2103
Conferma anomalia_1
Vector
0
Vector
p2104
Conferma anomalia_2
Vector
r4022.3
TM31 DI3
TM31
p2106
Anomalia esterna_1
Vector
r4022.6
TM31 DI6
TM31
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
553
Appendice
A.2 Macro dei parametri
Ricevitore
Parametri
Descrizione
Sorgente
DO
Parametri
Descrizione
DO
p2107
Anomalia esterna_2
Vector
1
Vector
p2112
Avviso esterno_1
Vector
r4022.11
p2116
Avviso esterno_2
Vector
1
Vector
p0738
DI/DO8
CU
0
CU
p0748.8
Inversione DI/DO8
CU
0
Non invertito
p0728.8
Impostazione ingresso o uscita
DI/DO8
CU
1
Uscita
p0739
DI/DO9
CU
0
p0748.9
Inversione DI/DO9
CU
0
Non invertito
p0728.9
Impostazione ingresso o uscita
DI/DO9
CU
1
Uscita
p0740
DI/DO10
CU
0
p0748.10
Inversione DI/DO10
CU
0
Non invertito
p0728.10
Impostazione ingresso o uscita
DI/DO10
CU
1
Uscita
p0741
DI/DO11
CU
0
p0748.11
Inversione DI/DO11
CU
0
Non invertito
p0728.11
Impostazione ingresso o uscita
DI/DO11
CU
1
Uscita
p0742
DI/DO12
CU
r2138.7
Tacitazione anomalia
p0748.12
Inversione DI/DO12
CU
0
Non invertito
p0728.12
Impostazione ingresso o uscita
DI/DO12
CU
1
Uscita
p0743
DI/DO13
CU
0
p0748.13
Inversione DI/DO13
CU
0
Non invertito
p0728.13
Impostazione ingresso o uscita
DI/DO13
CU
1
Uscita
p0744
DI/DO14
CU
0
p0748.14
Inversione DI/DO14
CU
0
Non invertito
p0728.14
Impostazione ingresso o uscita
DI/DO14
CU
1
Uscita
p0745
DI/DO15
CU
0
p0748.15
Inversione DI/DO15
CU
0
Non invertito
p0728.15
Impostazione ingresso o uscita
DI/DO15
CU
1
Uscita
p2103
Tacitazione anomalia 1
TM31
0
p2104
Tacitazione anomalia 2
TM31
r4022.3
TM31 DI3
TM31
p4030
DO0
TM31
r0899.11
Impulsi abilitati
Vector
p4031
DO1
TM31
r2139.3
Anomalia
Vector
p4048.1
Inversione DO1
TM31
1
Invertito
p4038
DO8
TM31
r0899.0
Pronto all'inserzione
p4028.8
Impostazione ingresso o uscita
DI/DO8
TM31
1
Uscita
TM31 DI11
TM31
CU
CU
CU
Vector
CU
CU
CU
TM31
Vector
Convertitori da incasso
554
Istruzioni operative, 04/2014, A5E00386872A
Appendice
A.2 Macro dei parametri
Ricevitore
Parametri
Descrizione
Sorgente
DO
Parametri
p4039
DO9
TM31
0
p4028.9
Impostazione ingresso o uscita
DI/DO9
TM31
0
p4040
DO10
TM31
0
p4028.10
Impostazione ingresso o uscita
DI/DO10
TM31
0
p4041
DO11
TM31
0
p4028.11
Impostazione ingresso o uscita
DI/DO11
TM31
0
Descrizione
DO
TM31
Ingresso
TM31
Ingresso
TM31
Ingresso
Macro dei parametri p0700 = 3: Morsetti CU (70003)
Con questa macro si impostano i morsetti della CU320 come sorgente dei comandi.
Tabella A- 4 Macro dei parametri p0700 = 3: Morsetti CU
Ricevitore
Parametri
Descrizione
Sorgente
DO
Parametri
Descrizione
CU DI0
DO
p0840[0]
ON/OFF1
Vector
r0722.0
p0844[0]
Nessun OFF2_1
Vector
1
CU
p0845[0]
Nessun OFF2_2
Vector
r0722.4
p0848[0]
Nessun OFF3_1
Vector
1
p0849[0]
Nessun OFF3_2
Vector
r0722.5
p0806
Blocco modo LOCALE
Vector
0
Vector
p0810
Commutazione CDS bit 0
Vector
0
Vector
p0852
Abilitazione funzionamento
Vector
1
Vector
p0854
Gestione richiesta
Vector
1
p0922
Selezione telegramma PZD
Profibus
Vector
999
Progettazione telegrammi libera
p1020
FSW bit 0
Vector
r0722.1
CU DI1
CU
p1021
FSW bit 1
Vector
r0722.2
CU DI2
CU
p1035
MOP più alto
Vector
r0722.1
CU DI1
CU
p1036
MOP più basso
Vector
r0722.2
CU DI2
CU
p1113
Inversione del senso di rotazione
Vector
0
Vector
p1140
Abilitazione generatore di rampa
Vector
1
Vector
p1141
Avvia generatore di rampa
Vector
1
Vector
p1142
Abilitazione n rif
Vector
1
Vector
p2103
Tacitazione anomalia 1
Vector
0
p2104
Tacitazione anomalia 2
Vector
r0722.3
CU DI3
CU
p2106
Anomalia esterna_1
Vector
r0722.6
CU DI6
CU
p2107
Anomalia esterna_2
Vector
1
p2112
Avviso esterno_1
Vector
r0722.11
Vector
CU DI4
CU
Vector
CU DI5
CU
Vector
Vector
Vector
CU DI11
CU
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
555
Appendice
A.2 Macro dei parametri
Ricevitore
Parametri
Descrizione
Sorgente
DO
Parametri
Descrizione
p2116
Avviso esterno_2
Vector
1
p0738
DI/DO8
CU
r0899.11
Impulsi abilitati
p0748.8
Inversione DI/DO8
CU
0
Non invertito
p0728.8
Impostazione ingresso o uscita
DI/DO8
CU
1
Uscita
p0739
DI/DO9
CU
r2139.3
Anomalia attiva
p0748.9
Inversione DI/DO9
CU
1
Invertito
p0728.9
Impostazione ingresso o uscita
DI/DO9
CU
1
Uscita
p0740
DI/DO10
CU
1
+24 V
p0748.10
Inversione DI/DO10
CU
0
Non invertito
p0728.10
Impostazione ingresso o uscita
DI/DO10
CU
1
Uscita
p0741
DI/DO11
CU
0
p0748.11
Inversione DI/DO11
CU
0
Non invertito
p0728.11
Impostazione ingresso o uscita
DI/DO11
CU
0
Ingresso
p0742
DI/DO12
CU
r2138.7
Conf. Anomalia
p0748.12
Inversione DI/DO12
CU
0
Non invertito
p0728.12
Impostazione ingresso o uscita
DI/DO12
CU
1
Uscita
p0743
DI/DO13
CU
1
+24 V
p0748.13
Inversione DI/DO13
CU
0
Non invertito
p0728.13
Impostazione ingresso o uscita
DI/DO13
CU
1
Uscita
p0744
DI/DO14
CU
1
+24 V
p0748.14
Inversione DI/DO14
CU
0
Non invertito
p0728.14
Impostazione ingresso o uscita
DI/DO14
CU
1
Uscita
p0745
DI/DO15
CU
1
+24 V
p0748.15
Inversione DI/DO15
CU
0
Non invertito
p0728.15
Impostazione ingresso o uscita
DI/DO15
CU
1
Uscita
DO
Vector
Vector
Vector
CU
CU
Vector
CU
CU
CU
Convertitori da incasso
556
Istruzioni operative, 04/2014, A5E00386872A
Appendice
A.2 Macro dei parametri
Macro dei parametri p0700 = 4: PROFIdrive + TM31 (70004)
Con questa macro si impostano l'interfaccia PROFIdrive e la morsettiera TM31 come
sorgente dei comandi.
Tabella A- 5 Macro dei parametri p0700 = 4: PROFIdrive + TM31
Ricevitore
Parametri
Descrizione
Sorgente
DO
Parametri
Descrizione
DO
p0840[0]
ON/OFF1
Vector
r2090.0
PZD 1 bit 0
Vector
p0844[0]
Nessun OFF2_1
Vector
r2090.1
PZD 1 bit 1
Vector
p0845[0]
Nessun OFF2_2
Vector
r4022.4
TM31 DI4
TM31
p0848[0]
Nessun OFF3_1
Vector
r2090.2
PZD 1 bit 2
Vector
p0849[0]
Nessun OFF3_2
Vector
r4022.5
TM31 DI5
TM31
p0806
Blocco modo LOCALE
Vector
0
Vector
p0810
Commutazione CDS bit 0
Vector
0
Vector
p0852
Abilitazione funzionamento
Vector
r2090.3
PZD 1 bit 3
Vector
p0854
Gestione richiesta
Vector
r2090.10
PZD 1 bit 10
Vector
p0922
Selezione telegramma PZD
Profibus
Vector
999
Progettazione telegrammi libera
p1020
FSW bit 0
Vector
0
Vector
p1021
FSW bit 1
Vector
0
Vector
p1035
MOP più alto
Vector
r2090.13
PZD 1 bit 13
Vector
p1036
MOP più basso
Vector
r2090.14
PZD 1 bit 14
Vector
p1113
Inversione del senso di rotazione
Vector
r2090.11
PZD 1 bit 11
Vector
p1140
Abilitazione generatore di rampa
Vector
r2090.4
PZD 1 bit 4
Vector
p1141
Avvia generatore di rampa
Vector
r2090.5
PZD 1 bit 5
Vector
p1142
Abilitazione n rif
Vector
r2090.6
PZD 1 bit 6
Vector
p2103
Tacitazione anomalia 1
Vector
r2090.7
PZD 1 bit 7
Vector
p2104
Tacitazione anomalia 2
Vector
r4022.3
TM31 DI3
TM31
p2106
Anomalia esterna_1
Vector
r4022.6
TM31 DI6
TM31
p2107
Anomalia esterna_2
Vector
1
p2112
Avviso esterno_1
Vector
r4022.11
p2116
Avviso esterno_2
Vector
1
Vector
p0738
DI/DO8
CU
0
CU
p0748.8
Inversione DI/DO8
CU
0
Non invertito
p0728.8
Impostazione ingresso o uscita
DI/DO8
CU
1
Uscita
p0739
DI/DO9
CU
0
p0748.9
Inversione DI/DO9
CU
0
Non invertito
p0728.9
Impostazione ingresso o uscita
DI/DO9
CU
1
Uscita
p0740
DI/DO10
CU
0
p0748.10
Inversione DI/DO10
CU
0
Vector
TM31 DI11
TM31
CU
CU
Non invertito
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
557
Appendice
A.2 Macro dei parametri
Ricevitore
Parametri
Descrizione
Sorgente
DO
Parametri
Descrizione
DO
p0728.10
Impostazione ingresso o uscita
DI/DO10
CU
1
Uscita
p0741
DI/DO11
CU
0
p0748.11
Inversione DI/DO11
CU
0
Non invertito
p0728.11
Impostazione ingresso o uscita
DI/DO11
CU
1
Uscita
p0742
DI/DO12
CU
r2138.7
Conf. Anomalia
p0748.12
Inversione DI/DO12
CU
0
Non invertito
p0728.12
Impostazione ingresso o uscita
DI/DO12
CU
1
Uscita
p0743
DI/DO13
CU
0
p0748.13
Inversione DI/DO13
CU
0
Non invertito
p0728.13
Impostazione ingresso o uscita
DI/DO13
CU
1
Uscita
p0744
DI/DO14
CU
0
p0748.14
Inversione DI/DO14
CU
0
Non invertito
p0728.14
Impostazione ingresso o uscita
DI/DO14
CU
1
Uscita
p0745
DI/DO15
CU
0
p0748.15
Inversione DI/DO15
CU
0
Non invertito
p0728.15
Impostazione ingresso o uscita
DI/DO15
CU
1
Uscita
p2103
Tacitazione anomalia 1
TM31
r2090.7
PZD 1 bit 1
Vector
p2104
Tacitazione anomalia 2
TM31
r4022.3
TM31 DI3
TM31
p4030
DO0
TM31
r0899.11
Impulsi abilitati
Vector
p4031
DO1
TM31
r2139.3
Anomalia
Vector
p4048.1
Inversione DO1
TM31
1
Invertito
p4038
DO8
TM31
r0899.0
Pronto all'inserzione
p4028.8
Impostazione ingresso o uscita
DI/DO8
TM31
1
Uscita
p4039
DO9
TM31
0
p4028.9
Impostazione ingresso o uscita
DI/DO9
TM31
0
p4040
DO10
TM31
0
p4028.10
Impostazione ingresso o uscita
DI/DO10
TM31
0
p4041
DO11
TM31
0
p4028.11
Impostazione ingresso o uscita
DI/DO11
TM31
0
CU
Vector
CU
CU
CU
Vector
TM31
Ingresso
TM31
Ingresso
TM31
Ingresso
Convertitori da incasso
558
Istruzioni operative, 04/2014, A5E00386872A
Appendice
A.2 Macro dei parametri
Macro dei parametri p1000 = 1: PROFIdrive (100001)
Con questa macro si imposta la sorgente del riferimento via PROFIdrive.
Tabella A- 6 Macro dei parametri p1000 = 1: PROFIdrive
Ricevitore
Parametri
Descrizione
Sorgente
DO
Parametri
Descrizione
DO
p1070
Valore di riferimento principale
Vector
r2050[1]
PROFIdrive PZD2
Vector
p1071
Scalatura valore di riferimento
principale
Vector
1
100 %
Vector
p1075
Valore di riferimento aggiuntivo
Vector
0
p1076
Scalatura valore di riferimento
aggiuntivo
Vector
1
100 %
Vector
Vector
Macro dei parametri p1000 = 2: Morsetti TM31 (100002)
Con questa macro viene preimpostato come sorgente del riferimento l'ingresso analogico 0
della morsettiera utente TM31.
Tabella A- 7 Macro dei parametri p1000 = 2: Morsetti TM31
Ricevitore
Parametri
Descrizione
Sorgente
DO
Parametri
Descrizione
DO
p1070
Valore di riferimento principale
Vector
r4055
AI0 TM31
TM31
p1071
Scalatura valore di riferimento
principale
Vector
1
100 %
Vector
p1075
Valore di riferimento aggiuntivo
Vector
0
p1076
Scalatura valore di riferimento
aggiuntivo
Vector
1
Vector
100 %
Vector
Macro dei parametri p1000 = 3: Potenziometro motore (100003)
Con questa macro si imposta come sorgente del riferimento il potenziometro motore.
Tabella A- 8 Macro dei parametri p1000 = 3: Potenziometro motore
Ricevitore
Parametro
Descrizione
Sorgente
DO
Parametro
Descrizione
DO
p1070
Valore di riferimento principale
Vector
r1050
Potenziometro motore
Vector
p1071
Scalatura valore di riferimento
principale
Vector
1
100 %
Vector
p1075
Valore di riferimento aggiuntivo
Vector
0
p1076
Scalatura valore di riferimento
aggiuntivo
Vector
1
100 %
Vector
Vector
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
559
Appendice
A.2 Macro dei parametri
Macro dei parametri p1000 = 4: Valore di riferimento fisso (100004)
Con questa macro si imposta come sorgente del riferimento il valore di riferimento fisso.
Tabella A- 9 Macro dei parametri p1000 = 4: Valore di riferimento fisso
Ricevitore
Parametro
Descrizione
Sorgente
DO
Parametro
Descrizione
DO
p1070
Valore di riferimento principale
Vector
r1024
Riferimento fisso attivo
Vector
p1071
Scalatura valore di riferimento
principale
Vector
1
100 %
Vector
p1075
Valore di riferimento aggiuntivo
Vector
0
p1076
Scalatura valore di riferimento
aggiuntivo
Vector
1
100 %
Vector
Vector
Convertitori da incasso
560
Istruzioni operative, 04/2014, A5E00386872A
Indice analitico
A
Adattamento del regolatore di velocità, 318
Addizione del valore di riferimento, 284
Aggiornamento firmware, 511
Alimentazione ausiliaria, 69
Alimentazione DC 24 V esterna, 69
Alimentazione dell'elettronica, 82, 98, 106
SMC30, 118
Anomalie, 463
Anomalie e avvisi, 463
Inoltro, 204
Interconnessioni BICO, 204
Propagazione, 204
AOP30, 171
Attrezzi, 36, 47, 467
Aumento della frequenza di uscita, 376
Avvertenze di sicurezza
Campi elettromagnetici, 20
Componenti sensibili alle scariche
elettrostatiche, 21
Avvisi, 463
B
Bande di arresto, 286
Boost di tensione, 295
all'accelerazione, 297
all'avviamento, 297
Permanente, 296
Bufferizzazione cinetica, 354
Bypass
Con sincronizzazione e sovrapposizione, 418
Con sincronizzazione senza sovrapposizione, 420
Senza sincronizzazione, 422
C
Campi elettromagnetici, 20
Canale del valore di riferimento, 284
Capicorda, 59
Caratteristica di attrito, 369
Caratteristiche, 28
CBE20, 246
CDS (Command Data Set), 194
Copia, 198
Classi di applicazioni, 220
Collegamenti dei segnali, 71
Collegamenti di potenza, 58
Collegamento dei cavi del motore e dei cavi di
rete, 61
Collegamento PROFIBUS, 83
Collegamento sensore di temperatura
Control Interface Module, 439
Sensor Module, 439
TM31, 438
Comando freni
Esteso, 426
Semplice, 388
Comando freni esteso, 426
Comando freni semplice, 388
Command Data Set, 194
Communication Board Ethernet CBE20, 246
Commutazione delle unità, 386
Commutazione motore, 367
Compatibilità elettromagnetica
Installazione in conformità EMC, 51
Introduzione, 49
Sicurezza di esercizio e immunità ai disturbi, 49
Compatibilità elettromagnetica EMC
Emissione di disturbi, 50
Compensazione dello scorrimento, 299
Componenti sensibili alle scariche elettrostatiche, 21
Comportamento di derating in presenza di elevata
frequenza impulsi, 379
Comunicazione
Numeri di porta utilizzati, 276
Servizi di comunicazione, 276
su PROFIdrive, 218
Comunicazione aciclica, 229
Determinazione dei numeri degli oggetti di
azionamento, 237
Job parametri e risposta parametri, 231, 232
Valori di errore nelle risposte parametri, 234
Comunicazione ciclica, 225
Comunicazione in tempo reale, 253
Contatore ore di esercizio, 382
Contatto a bimetallo normalmente chiuso, 440
Control Interface Module
Grandezza costruttiva FX, sostituzione, 473
Grandezza costruttiva GX, sostituzione, 475
Grandezza costruttiva HX, sostituzione, 477
Grandezza costruttiva JX, sostituzione, 479
Control Unit CU320-2, 42
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
561
Indice analitico
Control Unit CU320-2 DP, 75
Control Unit CU320-2 PN, 91
Controllo rottura cavo, 440
Controllo tramite PROFIBUS, 243
Controllo U/f, 292
Coppie di serraggio, 467
CU320-2 DP, 75
CU320-2 PN, 91
E
EDS (Encoder Data Set), 196
Encoder con fattore di riduzione, 184
Encoder Data Set, 196
Essential Service Mode, 404
F
Fattore di riduzione, 184
Filtro del valore attuale del numero di giri, 310
Filtro del valore di riferimento di corrente, 327
Data di produzione, 32
Firmware dell'apparecchio, aggiornamento, 511
Dati di derating, 515
Forming dei condensatori del circuito intermedio, 509
Altitudini di installazione superiori a 2000 ... 5000 m
Frenatura in corrente continua, 374
s.l.m., 516
Frenatura mediante cortocircuito dell'indotto
Corrente di uscita ammessa in funzione della
Esterno, 371
temperatura ambiente, 515
Interno, 373
Derating di corrente in funzione della frequenza
Funzionamento di emergenza, 404
impulsi, 517
Funzionamento in parallelo delle interfacce di
Impiego di un trasformatore di isolamento, 517
comunicazione, 279
Riduzione della temperatura ambiente e della
Funzionamento in rete senza messa a terra, 64
corrente di uscita, 516
Funzionamento online con STARTER, 248
Dati tecnici, 520
Funzione bypass, 417
Informazioni generali, 514
Funzioni di protezione, 433
Power Module, 3 AC 380 ... 480 V, 521
Funzioni di sorveglianza, 433
Power Module, 3 AC 500 ... 600 V, 527
Funzioni di sorveglianza estese, 430
DCC, 28, 282
DCNS, 62
DCPS, 62
G
DCPS, DCNS – Collegamento per un filtro du/dt con
Generatore di rampa, 288
Voltage Peak Limiter, 62
DDS (Drive Data Set), 195
Copia, 198
H
Determinazione dei numeri degli oggetti di
azionamento, 237
Hotline, 6
Determinismo, 254
Diagnostica, 452
LED, 452
I
Parametri, 458
Identificazione dati del motore, 343
Disegni quotati
Identificazione motore, 342
Control Unit CU320-2, 42
IF1, 279
Sensor Module SMC30, 45
IF2, 279
Terminal Module TM31, 44
Immagazzinaggio, 34
Disimballaggio, 36
Impostazione di fabbrica, 184
Drive Control Chart, 282
Informazioni di sicurezza
Drive Control Chart (DCC), 28
Informazioni generali di sicurezza, 17
Drive Data Set, 195
Ingressi analogici, 109, 213
Drive Objects, 192
Ingressi digitali, 107, 108
Ingressi/uscite digitali, 79, 81, 95, 97, 112
Ingresso binettore (BI), 200
Ingresso connettore (CI), 200
D
Convertitori da incasso
562
Istruzioni operative, 04/2014, A5E00386872A
Indice analitico
Interfacce di comunicazione
Funzionamento in parallelo, 279
Interfaccia DRIVE-CLiQ, 78, 94, 106, 118
Interfaccia Ethernet, 165, 247
Interfaccia PROFINET, 100
Interfaccia seriale (RS232), 87, 100
Inversione di direzione, 285, 385
IO Supervisor, 252
IO-Controller, 252
IO-Device, 252
J
Job parametri e risposta parametri, 231, 232
K
K50, 114
KTY, 440
L
Limitazione del numero di giri, 287
Limitazione di coppia, 326
Lunghezze cavi, 60
Luogo di installazione, 35
M
Magnetizzazione rapida, 351
Manutenzione, 466
Manutenzione e riparazione, 465
MDS (Motor Data Set), 197
Copia, 198
Messa in servizio di base
Identificazione motore, 181
Immissione dei dati del motore, 175
Immissione dei dati dell'encoder, 176
Immissione dei parametri di base, 179
Selezione del tipo di motore, 175
Misura in rotazione, 346
Abbreviata, 348
Misura in stato di fermo, 343
Misura rotante abbreviata, 348
Modalità simulazione, 383
Modelli termici del motore, 441
Modello a 3 masse, 442
Modello di riferimento, 317
Modello I2t del motore, 441
Modulo di controllo carico, 430
Morsetti di uscita, 333
Motor Data Set, 197
Motori sincroni ad eccitazione permanente, 328
N
Nozioni di base
Copia di set di dati del motore (MDS), 198
Copia di set di dati di comando (CDS), 198
Copia di un set di dati dell'azionamento (DDS), 198
Ingresso binettore (BI), 200
Ingresso connettore (CI), 200
Interconnessione di segnali, 201
Set di dati, 193
Set di dati del motore (MDS), 197
Set di dati dell'azionamento (DDS), 195
Set di dati dell'encoder (EDS), 196
Set di dati di comando (CDS), 194
Tecnica BICO, 199
Uscita binettore (BO), 200
Uscita connettore (CO), 200
Numero di giri minimo, 286
O
Oggetti di azionamento (Drive Objects), 192
Ottimizzazione automatica del regolatore di
velocità, 342
Ottimizzazione del regolatore di velocità, 346
Ottimizzazione del rendimento, 349
P
Pannello operatore, 171
Potenziometro motore, 215
Powerblock
Grandezza costruttiva FX, sostituzione, 481
Grandezza costruttiva GX, sostituzione, 484
Grandezza costruttiva HX, sostituzione, 487
Grandezza costruttiva JX, sostituzione, 492
Occhielli per il sollevamento tramite gru, 470
Precomando del regolatore del n. di giri, 314
Preparativi
Installazione meccanica, 35
Principi del sistema di azionamento, 189
Principi fondamentali
Classificazione dei parametri, 190
Oggetti di azionamento, 192
Parametri, 189
Tipi di parametri, 189
PROFIBUS
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
563
Indice analitico
Connettori, 84
Impostazione degli indirizzi, 85
Resistenza terminale di chiusura bus, 84
Switch degli indirizzi, 85
PROFIdrive, 218
Apparecchio di azionamento, 219
Classi dell'apparecchio, 218
Classi di applicazioni, 220
Comunicazione aciclica, 229
Comunicazione ciclica, 225
Controller, 219
Supervisor, 219
PROFIenergy, 258
Certificazione, 258
Comandi, 261
PROFINET
Canali di collegamento, 257
Trasmissione dati, 257
PROFINET IO, 252
Assegnazione dell'indirizzo IP, 255
Indirizzi, 254
Indirizzo IP, 255
Indirizzo MAC, 254
Nome del dispositivo (NameOfStation), 256
RT e IRT, 253
PROFINET IO con IRT, 254
PROFINET IO con RT, 254
Propagazione, 204
Protezione contro il blocco, 436
Protezione contro lo stallo, 437
Protezione delle parti di potenza, 433
Protezione in scrittura, 395
Protezione know-how, 397
Attivazione, 399
Disattivazione, 400
Lista eccezioni OEM, 401
Modifica password, 401
Protezione contro la copia, 402
Sostituzione apparecchio, 402
Protezione termica del motore, 438
PT100, 440
PTC, 440
Pulizia, 466
Q
Qualità, 29
R
Reazioni al sovraccarico, 434
Regolatore di tecnologia, 414
Regolatore di velocità, 311
Regolazione della coppia, 323
Regolazione Vdc, 353
Regolazione Vdc minima, 354
Regolazione Vdc_max, 356
Regolazione vettoriale
Con encoder, 309
Senza encoder, 302
Regolazione vettoriale di numero di giri/coppia
con/senza encoder, 301
Reinserzione automatica, 358
Reset parametri, 184
Ripristino dei parametri tramite AOP30, 184
Ripristino dei parametri tramite STARTER, 185
Rete IT, 64
Rete senza messa a terra, 64
Retroazione del generatore di rampa, 290
Riavviamento al volo, 361
Con encoder, 365
Riavviamento al volo rapido con rilevamento della
tensione tramite VSM10, 365
Riavviamento al volo veloce, 364
Senza encoder, 362
Riparazione, 467
Rischi residui, 23
S
S5 - Convertitore tensione/corrente AI0, AI1, 110
Scheda di memoria, 43
Posto connettore, 89, 102
Schema di cablaggio
Collegamenti DRIVE-CLiQ, 70
Schema di cablaggio DRIVE-CLiQ, 70
Scollegamento dell'unità antidisturbi, 64
Selezione di telegrammi definita dall'utente, 226
Senso di rotazione del motore, 61
Sensor Module Cabinet-Mounted SMC30 (opzione
K50), 114
Sensor Module SMC30, 45
Sensore di temperatura, 110
Server web, 407
Login, 409
Logout, 410
Pagina iniziale, 409
Pagine Web definite dall'utente, 408
Service, 29
Set di dati, 193
Sezioni di collegamento, 60
SINAMICS Link, 265
Attivazione, 271
Convertitori da incasso
564
Istruzioni operative, 04/2014, A5E00386872A
Indice analitico
Clock del bus, 266
Dati di invio, 265
Dati di ricezione, 265
Diagnostica, 274
Esempio di progettazione, 272
Interruzione della comunicazione, 274
Messa in servizio, 268
Numero di nodi, 266
Presupposti, 265
Ricezione dei dati, 270
Tempo di trasmissione, 266
Topologia, 267
Trasmissione dei dati, 268
Sincronizzazione, 390
SMC30, 114
SMC30, esempi di collegamento, 123
Smorzamento della risonanza, 298
Sorgenti dei comandi
Informazioni generali, 188
Morsetti CU, 209
Morsetti TM31, 207
PROFIdrive, 205
PROFIdrive+TM31, 211
Sorgenti del valore di riferimento, 213
Informazioni generali, 188
Ingressi analogici, 213
Potenziometro motore, 215
Valori di riferimento fissi per numero di giri, 216
Sorveglianze termiche, 434
Sostituzione
Aggiornamento automatico del firmware, 510
Control Interface Module, grandezza costruttiva
FX, 473
Control Interface Module, grandezza costruttiva
GX, 475
Control Interface Module, grandezza costruttiva
HX, 477
Control Interface Module, grandezza costruttiva
JX, 479
Messaggi di errore, 510
Occhielli per il sollevamento tramite gru, 470
Powerblock, grandezza costruttiva FX, 481
Powerblock, grandezza costruttiva GX, 484
Powerblock, grandezza costruttiva HX, 487
Powerblock, grandezza costruttiva JX, 492
Telaio di montaggio, 469
Ventilatore, grandezza costruttiva FX, 497
Ventilatore, grandezza costruttiva GX, 499
Ventilatore, grandezza costruttiva HX, 501
Ventilatore, grandezza costruttiva JX, 505
Sostituzione di componenti, 472
Sovraccaricabilità, 519
Sovraccarico basso, 519
Sovraccarico elevato, 519
STARTER, 126
Creazione di un progetto, 130
DEVICE, 163
Funzionamento online tramite PROFINET, 248
Installazione, 128
Interfaccia operativa, 129
Messa in servizio, 130
Punto di accesso, 162
S7ONLINE, 163
Selezione apparecchio di destinazione, 162
Trasferimento del progetto di azionamento, 163
STARTER via Ethernet, 165
Impostazione dell'indirizzo IP dell'azionamento, 167
Impostazione dell'indirizzo IP dell'interfaccia
PG/PC, 166
Parametri, 170
Statica, 320
Supporto, 6
T
Targhetta identificativa, 31
Data di produzione, 32
Technical Support, 6
Tecnica BICO, 199
Interconnessione di segnali, 201
Telaio di montaggio, 469
Telegrammi e dati di processo, 225
Tempo di esecuzione, 382
Tensione ausiliaria, 111
Tensione del ventilatore, adattamento, 62
Terminal Module TM31, 43, 104
Terminal Module TM54F, 124
TM150
Analisi della temperatura, 447
Formazione di gruppi, 446
Guasto di un sensore all'interno di un gruppo, 448
Rilevamento della temperatura, 444
Tipi di sensore di temperatura, 444
TM31, 104
Schema dei collegamenti, 105
TM31, vista frontale, 104
TM54F, 124
Trasmissione dati
PROFINET, 257
Trasporto, 33
Convertitori da incasso
Istruzioni operative, 04/2014, A5E00386872A
565
Indice analitico
U
Uscita binettore (BO), 200
Uscita connettore (CO), 200
Uscite a relè, 113
Uscite analogiche, 110, 334
Uscite digitali, 338
V
Valore attuale del numero di giri aperto, 321
Valori di errore nelle risposte parametri, 234
Valori di riferimento fissi, 216
Valori di riferimento fissi per numero di giri, 216
Valutazione del sensore di temperatura, 438
Contatto a bimetallo normalmente chiuso, 440
Controllo rottura cavo, 440
KTY, 440
Modello a 3 masse, 442
Modello I2t del motore, 441
PT100, 440
PTC, 440
Ventilatore
Grandezza costruttiva FX, sostituzione, 497
Grandezza costruttiva GX, sostituzione, 499
Grandezza costruttiva HX, sostituzione, 501
Grandezza costruttiva JX, sostituzione, 505
Visualizzazione del risparmio di energia, 392
Vobulazione di frequenza degli impulsi, 380
X501, 106
X520, 107
SMC30, 119
X521, 109
SMC30, 121
X522, 110
X524, 106
SMC30, 118
X530, 108
X531
SMC30, 121
X540, 111
X541, 112
X542, 113
X9, 71
X
X100, 78, 94
X101, 78, 94
X102, 78, 94
X103, 78, 94
X122, 79, 95
X124, 82, 98
X126, 83
X127, 86, 99
X132, 81, 97
X140, 87, 100
X1400, 247
X150, 100
X400, 74
X401, 74
X402, 74
X41, 71
X42, 73
X46, 73
X500, 106
SMC30, 118
Convertitori da incasso
566
Istruzioni operative, 04/2014, A5E00386872A