DTI
Windup e anti-windup measure
Ivan Furlan, ricercatore SUPSI
26 ottobre 2012
1
DTI
Contenuti
1.
Che cosa si intende per windup ed i suoi effetti negativi sui sistemi
controllati
2.
Metodi antiwindup (anti-windup measure) : “come attenuare gli effetti
indesiderati del windup”
3.
Effetti dell’anti-windup sui sistemi controllati
4.
Conclusioni
DTI
1. Che cosa si intende per windup ed i suoi effetti
negativi sui sistemi controllati
DTI
Sistemi controllati in closed-loop
Esempio: controllo di corrente di un motore DC
r : corrente desiderata
+
u_c
Controllore PI
Sorgente
di tensione
Attuatore
I : corrente reale
u
Parte elettrica
del motore DC
Problema : la sorgente di tensione controllata (attuatore) ha dei limiti fisici !
Esempio : Tensione massima d’uscita del blocco sorgente di tensione ±10 V
In gergo si dice che l’attuatore è saturato
DTI
Rappresentazione grafica dell’attuare saturato
r : corrente desiderata
+
u_c
I : corrente reale
u
Controllore PI
u_c : segnale con range illimitato
u
: segnale con range limitato
Attuatore
Saturato
u_max = 10 V
Parte elettrica
del motore DC
DTI
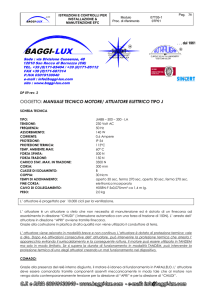
Effetti indesiderati della saturazione
r : corrente desiderata
+
u_c(t)
u
I : corrente reale
-
Controllore PI
Uscita del processo I(t) (corrente)
Comportamento
non voluto
u_max = 10 V
Parte elettrica
del motore DC
Attuazione u_c(t) (tensione)
DTI
Riassumendo
•
Gli attuatori sono sempre saturati, esempi:
– Attuazione di un sistema elettrico
Generatori di tensione o corrente:
possono fornire tensioni o correnti, ma limitate in ampiezza
– Attuazione di un sistema meccanico
Motore elettrico: può fornire forza o momento ma limitati in
ampiezza
•
Come conseguenza si può generare windup,
cioè una sovraelongazione del segnale di attuazione u_c rispetto al
valore massimo di attuazione disponibile u_max. La sovraelongazione
è dovuta a l’accumulazione dell’errore da parte del controllo integrale.
•
Questo si traduce in un comportamento non voluto della variabile
d’uscita (la variabile che vogliamo controllare).
DTI
2. Metodi anti-windup (anti-windup measure):
“come attenuare gli effetti indesiderati del windup”
DTI
Metodo 1 : Saturation feedback
r : corrente desiderata
+
I : corrente reale
u_c
+
Numeratore
del controllore
+
Attuatore
Saturato
u_max = 10 V
Parte elettrica
del motore DC
1–s
1 – denominatore del controllore
Effetto del metodo saturation feedback : u non può mai superare u_max !
DTI
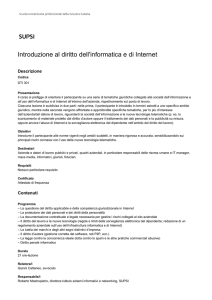
e
uc
u
Con una saturazione a ±1 e con un errore d’entrata a 1 avremo:
uc =0.2 e u=0.2
uc =0.4 e u=0.4
uc =0.6 e u=0.6
uc =0.8 e u=0.8
uc =1.0 e u=1.0
uc =1.2 e u=1.0
uc =1.2 e u=1.0
…
DTI
Metodo 1 : Saturation feedback con filtro LP
r : corrente desiderata
+
(KPs+KI).F(s)
Numeratore .
Filtro LP
del controllore
I : corrente reale
u_c
+
+
Attuatore
Saturato
u_max = 10 V
Parte elettrica
del motore DC
1 – s
F-1(s)
1 – denominatore del controllore
Filtro LP-1
F(s) : di norma scelto come LP con frequenza di taglio equivalente al polo closed loop più veloce.
Il filtro F(s) ha influsso solamente se u_c = u_max.
Il filtro F(s) serve ad attenuare eventuali brusche variazioni del segnale di errore le quali potrebbero
destabilizzare il sistema.
DTI
Metodo 2 : utilizzo di una dead-zone
r : corrente desiderata
+
u_c
Controllore PI
r : corrente desiderata
+
I : corrente reale
u
Attuatore
Saturato
u_max = 10 V
+
u_c
Parte elettrica
del motore DC
I : corrente reale
u
+
-
Controllore PI
Attuatore
Saturato
u_max = 10 V
Parte elettrica
del motore DC
DTI
Metodo 2 : utilizzo di una dead-zone
Proporzionale
r : corrente desiderata
+
+
u_c
I : corrente reale
u
+
+
Integratore
Attuatore
Saturato
u_max = 10 V
Parte elettrica
del motore DC
Dead-zone
Se |u_c| > u_max allora si inietta il segnale -Ka*(|u_c| – u_max) all’ingresso dell’integratore, conseguenza:
L’uscita dell’integratore decresce
u_c decresce
Scelta di Ka : Ka*KI = 10 volte la banda del sistema in closed-loop
DTI
Metodo 2 : rappresentazione equivalente
Proporzionale
r : corrente desiderata
+
+
u_c
I : corrente reale
u
+
+
Integratore
Attuatore
Saturato
u_max = 10 V
+
Parte elettrica
del motore DC
DTI
4. Effetti dell’anti-windup sui sitemi controllati
DTI
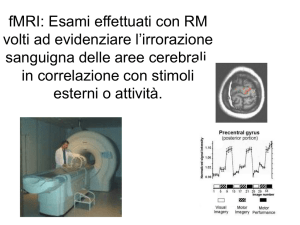
Effetti dell’anti-windup : Metodo 1 (Saturation feedback)
Nero : comportamento ideale senza saturazione
Rosso : comportamento con attuatore saturato a 10V
Magenta : comportamento con attuatore saturato a 10V e antiwindup
Attuazione u_c(t) (tensione)
Uscita del processo I(t) (corrente)
DTI
5. Conclusioni
DTI
Conclusioni
• Il windup si presenta quando l’attuatore e’saturato ed il controllo contiene una parte integrale.
• Per windup si intende una sovraelongazione del segnale di attuazione u_c dato dal controllore
rispetto al valore massimo di attuazione disponibile u_max.
• Questo genera comportamenti indesiderati della variabile controllata (vedi esempio).
• I metodi anti-windup servono per ridurre i comportamenti indesiderati della variabile controllata.
• Si procede cosi :
1)
2)
Si calcola il controllore come se la saturazione non ci fosse.
Si applica uno dei due metodi visti al controllore ottenuto